
ベッド位置決め方法
【課題】放射線治療における、高速な6自由度のベッド位置決め法を提供する。
【解決手段】本発明では、複数方向からX線透視画像を撮影し、各画像の撮影方向に対応するDRRを生成し、最適化アルゴリズムにて6自由度の患者ずれ量を仮生成する。ずれ量の面外回転成分を計算し、DRR生成時からの変化が既定値より大きい場合にDRRを再生成し、小さい場合にずれを各DRRの平面変換で近似する。ずれ量を各DRRの平面変換成分へ射影し、DRR生成時から既定位置以上変化した場合にDRRを平面変換する。変換されたDRRとX線透視画像の類似度の総和(総類似度)を計算し、総類似度を増大させるよう最適化アルゴリズムで探索範囲を更新する。探索範囲が収束条件を満たす場合に計算を終了し、満たさない場合、再び最適化アルゴリズムで仮のずれ量を生成し、計算を繰り返す。これにより上記課題を解決する。
【解決手段】本発明では、複数方向からX線透視画像を撮影し、各画像の撮影方向に対応するDRRを生成し、最適化アルゴリズムにて6自由度の患者ずれ量を仮生成する。ずれ量の面外回転成分を計算し、DRR生成時からの変化が既定値より大きい場合にDRRを再生成し、小さい場合にずれを各DRRの平面変換で近似する。ずれ量を各DRRの平面変換成分へ射影し、DRR生成時から既定位置以上変化した場合にDRRを平面変換する。変換されたDRRとX線透視画像の類似度の総和(総類似度)を計算し、総類似度を増大させるよう最適化アルゴリズムで探索範囲を更新する。探索範囲が収束条件を満たす場合に計算を終了し、満たさない場合、再び最適化アルゴリズムで仮のずれ量を生成し、計算を繰り返す。これにより上記課題を解決する。
【発明の詳細な説明】
【技術分野】
【0001】
放射線治療におけるベッド位置決め方法に関する。
【背景技術】
【0002】
放射線治療では治療対象の位置を治療計画と一致させるため、治療対象を載せたベッドの位置決めを行う。ベッド位置の決定には、治療計画画像と治療時に撮影するX線透視画像を用いる。体内の治療対象、あるいは治療対象近傍の対象を位置決め対象とし、位置決め対象を含む領域をX線透視撮影し、撮影された画像と治療計画の基準画像との比較から位置決め対象のずれ量を求める。そのずれ量を補正するようベッドの移動量を決定する。粒子線治療やX線IMRTなどでは標的に集中した線量分布が実現可能であり、位置決めにおいても標的位置を計画と高精度で一致させる必要がある。標的位置を高精度に位置決めするため、位置決め対象の平行移動3自由度,回転3自由度の計6自由度に対して計画と治療時のずれを算出することが求められる。また、治療時間短縮のため、ベッド位置決め時間の短縮が求められている。
【0003】
治療計画は治療前に予め撮影された3次元画像に対して行われる。3次元画像には典型的には複数のスライスで構成されるX線CT画像が用いられる。治療計画では3次元画像に写った位置決め対象と放射線照射装置に対する位置関係が計画される。
【0004】
治療時における位置決め対象位置と放射線照射装置の位置関係は、放射線照射装置との位置関係が既知のX線撮影装置によって撮影した位置決め対象のX線透視画像により確認される。X線透視画像を用いるのは位置決め対象の内部構造を基準として位置決めするためである。X線透視画像は典型的には直交する2方向から別々の撮影装置で撮影される。
【0005】
治療計画3次元画像と2次元のX線透視画像の比較では、治療計画3次元画像から数値シミュレーションにて生成したX線透視画像であるDRR(Digitally Reconstracted Radiograph)を生成し、2次元画像同士で比較を行う。DRRの生成では、計画された治療計画画像と放射線治療装置の位置関係を用いる。
【0006】
ただし、2組の対応するX線透視画像とDRRから6自由度のずれを自動的に検出することは困難なことが知られている。平面内の平行移動や平面に垂直な軸に対する回転(面内変換)は高精度で検出可能であるが、平面に平行な軸に対する回転(面外回転)の検出が困難である。
【0007】
6自由度のずれを検出可能とする方法として、計画画像と放射線照射装置の位置関係が治療計画とは異なるDRRを複数生成し、得られたDRRの中で最もX線透視画像と一致するものを選ぶことで、3次元画像とX線透視画像を位置合わせする方法(DRR生成最適化法)が知られている。ただし、全ての自由度に関してDRR生成最適化法を用いると計算時間が長くなるため、平面画像位置合わせを併用し高速化する手法として特許文献1、及び2がある。
【0008】
特許文献1では、各DRRと対応するX線透視画像で面内変換に対しては平面画像位置合わせを行い、面外回転の2自由度に対してはDRR生成最適化を行い、全体として6自由度のずれ量を決定している。
【0009】
特許文献2では、画像に対して面内変換とDRR再生成を組み合わせて画像を位置合わせし、画像のずれ量から患者ずれ量を求める。面内変換を行う場合、面内変換した画像を比較して画像類似度の最大化を行い、その過程で得られた平面画像のずれ量を3次元的な位置決め対象ずれ量へと変換して6自由度のずれ量を決定している。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】US7,204,640
【特許文献2】US7,412,086
【発明の概要】
【発明が解決しようとする課題】
【0011】
治療時間短縮のため、ベッド位置決めにおける計算時間短縮が望まれている。特許文献1に記載の方法では、2組のX線透視画像撮影装置を用いる場合に各画像で6自由度決定するため、複数の画像から重複して決定される自由度が存在することになる。自由度の重複した決定をなくすことで計算時間の短縮の可能性がある。
【0012】
また、特許文献2に記載されている面内変換結果を患者ずれ量に変換する手順では、以下の2点で不必要な計算をする可能性がある。1点目は、最適化の収束判定に関するものである。患者ずれ量の最適化では探索範囲が3次元空間内で十分狭くなった時点で計算を終了し、不必要な計算を省く事が可能と考えられる。しかし、特許文献2の方法では最低でも一回の面内変換後に患者ずれ量が求められるため、患者ずれ量の探索範囲が十分狭いにもかかわらず画像変換が行われる可能性がある。2点目は、最適化における位置パラメータの変化の経路に関するものである。患者ずれ量の最適化では6自由度空間において最適解を探索するが、最適化の経路を制限すると、収束までに多くの試行計算が必要になる可能性がある。例えば、上記手順に従って一つの画像対の面内変換による最適化を行うことは、6自由度のうち3自由度しか変換を許さない最適化となる。他の自由度を変化させるためには、面内変換のずれ量を患者ずれ量に変換し、DRRを再生成し、他の画像対に対して最適化するという手順が必要となる。以上の2点で考えられる不必要な計算を削減することで計算時間の短縮の可能性がある。
【0013】
ベッド位置決めにおける計算時間の短縮には、精度を保ちながら計算量の少ない位置決め方法が必要である。従来法に比べて計算時間を短縮するため、精度を保ちながら計算量を減らすという課題があった。
【課題を解決するための手段】
【0014】
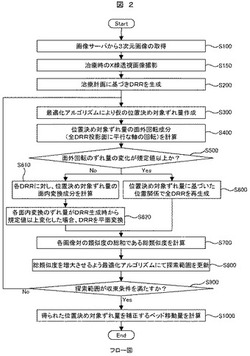
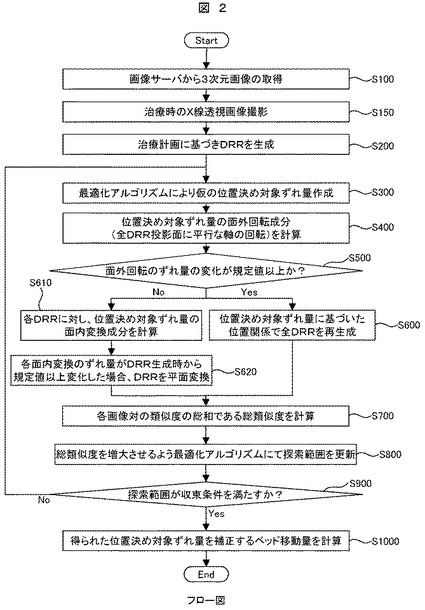
本発明のベッド位置決め方法は、始めに複数方向から撮影されるX線透視画像の組を取得し、治療計画の位置関係に従い、(1)治療計画画像から各画像の撮影方向に対応するDRRを生成し、(2)最適化アルゴリズムにて6自由度の患者ずれ量の仮生成を行う。その後、(3)ずれ量の全DRR投影面に平行な軸の回転成分(面外回転成分)を計算し、(4−A)面外回転成分が規定値より大きい場合にはずれ量に基づいた位置関係で全DRRを作り直し、(4−B)面外回転成分が規定値より小さい場合には、ずれ量の各DRRの面内変換成分を計算し、面内変換成分がDRR生成時から規定位置以上になった場合にDRRを平面変換する。次に、(5)DRRとX線透視画像の各対で類似度の総和である総類似度を計算し、(6)総類似度を増大させるよう最適化アルゴリズムにて探索範囲を更新する。(7)上記(2)から(6)を繰り返し、最適化の探索範囲が規定の収束条件を満たすと計算を終了する。(8)得られた位置決め対象ずれ量を補正するベッド移動量を計算してベッド位置決めする。
【発明の効果】
【0015】
上記方法により高速な6自由度のベッド位置決めが可能となり、ベッド位置決め時間の短縮が可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態を示すシステム図。
【図2】本発明の実施例における処理フローを示す図。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明を実施するための形態を説明する。
〔実施例1〕
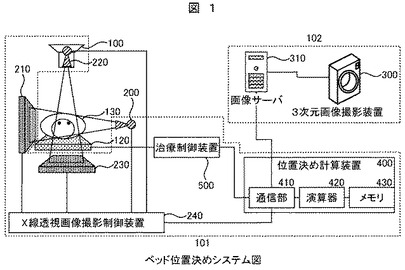
図1に示すように、本実施例のベッド位置決め装置101,第1X線発生装置(X線管)200と第1X線検出器210を有する第1X線透視画像撮影装置,第2X線発生装置(X線管)220と第2X線検出器230を有する第2X線透視画像撮影装置,X線透視画像撮影制御装置240,位置決め計算装置400,治療制御装置500,図示しない入力手段(キーバード,マウス等)を備える。
【0018】
第1X線発生装置(X線管)200は治療ビーム照射装置100に取り付けられ、治療ビーム照射装置100の移動(回転)とともに移動(回転)可能な構成を有する。第1X線検出器210は治療ビームのビームライン上に位置しており、ベッド120を基準として治療ビーム照射装置100の反対側に配置される。また、第2X線透視画像撮影装置も移動可能な構成を有する。第2X線検出器230は、第2X線発生装置220から放射されて照射対象を透過したX線を検出する位置に配置される。つまり、第2X線発生装置220が移動すると、第2X線検出器230も移動してX線を検出する位置に設置される。
【0019】
X線透視画像撮影制御装置240は、第1X線透視画像撮影装置及び第2X線透視画像撮影装置に接続され、これらを制御する。具体的には、X線透視画像撮影制御装置240は、第1X線発生装置200及び第2X線発生装置220からのX線の照射開始及び照射停止の制御や、第1X線検出器210及び第2X線検出器230からのX線検出信号に基づく画像データの作成や、これらを設置する位置を制御する。
【0020】
位置決め計算装置400は、通信部410,演算器420及びメモリ430を有する。位置決め計算装置400(具体的には通信部410)が、治療計画画像撮影装置102,治療制御装置500及びX線透視画像撮影制御装置240に接続されている。通信部410は、演算部420を介してメモリ430に接続される。
【0021】
治療制御装置500がベッド120に接続される。治療制御装置500は、位置決め計算装置400の演算結果に基づいて、ベッド120の位置決め制御をする。
【0022】
治療計画画像撮影装置102は、3次元画像撮影装置300及び画像サーバ310を有する。
【0023】
放射線治療システムではベッド120上の治療対象に治療ビーム照射装置100から治療ビームを照射する。治療時に位置決め対象130を治療ビーム照射装置100に対して計画通りの位置に配置するため、X線透視画像を撮影する。以下、ベッド位置決め装置101を用いてベッド120を位置決めする方法について説明する。
【0024】
治療ビームによる治療を開始するために位置決め対象(患者)130がベッド120にのせられると、医者等の操作者は、患者130の体表面に描かれた十字マーク(患部の真上にレーザーで表示されたマーク等)がビームライン上に位置するように、入力装置(図示せず)を用いて治療制御装置500にベッドの移動指令を入力する。治療制御装置500は、その移動指令に基づいてベッド120を移動させ、体表面の十字マークがビームライン上に一致するように制御する。
【0025】
操作者は、X線透視画像撮影装置の移動開始信号を、入力装置(図示せず)からX線透視画像撮影制御装置240に入力する。移動開始信号を受信したX線透視画像撮影制御装置240は、第1X線透視画像撮影装置及び第2X線透視画像撮影装置を移動させて所定の位置に配置する。第1X線透視画像撮影装置及び第2X線透視画像撮影装置は、患者130のX線撮影方向が直交する2方向となるように配置されている。その後、操作者がX線照射開始信号をX線透視画像撮影制御装置240に入力すると、X線透視画像撮影制御装置240からの指示で第1X線発生装置200及び第2X線発生装置220からX線を照射し、第1X線検出器210及び第2X線検出器230で透過X線を検出する。第1X線検出器210及び第2X線検出器230は、透過X線を検出するとX線透視画像撮影制御装置240にX線検出信号を出力する。X線透視画像撮影制御装置240はこれらのX線検出信号に基づいて画像データを作成する。前述の通り、X線撮影方向は直交する2方向である。作成された画像データ(現在画像データ)は、位置決め計算装置400に出力される。
【0026】
位置決め計算装置400は、X線透視画像撮影制御装置240から、通信部410を通して画像データを受信し、演算器420がメモリ430に画像データを保存する。
【0027】
治療計画時に用いる3次元画像は3次元画像撮影装置300で撮影する。撮影された画像データは画像サーバ310に保存される。治療時に位置決め計算装置400が通信部を介して画像サーバから3次元画像を取得し、メモリ430に保存する。
【0028】
位置決め計算装置400では、X線透視画像と3次元画像データが保存されると、演算器420は3次元画像データからDRRを計算する。演算器はDRRとX線透視画像の比較を行い、最適化手順によりX線透視画像と3次元画像中の位置決め対象位置を対応付け、位置決め対象位置の計画からのずれを求める。演算器420は最終的に位置決め対象位置のずれから、ずれを補正するベッド移動量を求める。
【0029】
操作者の指示により、計算されたベッド移動量は位置決め計算装置400から治療制御装置500に送られる。治療制御装置500は、受信したベッド移動量に基づいて、ベッド120を移動して位置決め制御される。
【0030】
本実施例の位置決め計算装置400は、X線透視画像撮影制御装置240から受信した現在画像データ及び治療計画画像撮影装置102の画像サーバ310に記憶されていた画像データを用いて、ベッド120の位置決めデータを生成し、この位置決めデータを治療制御装置500に出力する。以下、位置決め装置400が位置決めデータを生成する処理手段を、図2のフローチャートを参照しながら説明する。なお、このような処理手段は位置決め計算装置400のメモリ430に格納されている。
【0031】
まず、位置決め計算装置400は操作者の指示により、予め3次元画像撮影装置300で撮影され画像サーバ310に保存された位置決め対象の3次元画像データを通信部410を通して取得し、メモリ430に保存する(ステップ100)。
【0032】
患者130の患部を治療ビームライン上に位置決めするに際し、ベッド120に乗せられた位置決め対象130の第1及び第2のX線透視画像を撮影する(ステップS150)。それぞれのX線透視画像は第1及び第2のX線透視画像撮影装置によって撮影される。撮影された現在画像データはX線画像撮影制御装置240から位置決め計算装置400に送られる。位置決め計算装置400はこの現在画像データを通信部410で受信し、演算器420を介してメモリ430に保存する。
【0033】
位置決め計算装置400は、治療計画時に3次元画像撮影装置300で撮影した3次元画像と第1及び第2のX線透視画像撮影装置の計画された位置関係に従ってDRRを計算する(ステップS200)。DRRは、画素毎に対応するX線検出器の領域とX線源(X線発生装置のX線を放射する点)の間を結ぶ直線上において、3次元画像の画素値から変換された物質量を積算し、最終的にX線透過率に変換することで計算する。
【0034】
治療計画の位置関係を基準位置とし、基準位置で計算されたDRRを基準DRRとする。位置決め計算装置400は、X線透視画像撮影時の位置決め対象位置130が基準位置からどれだけずれているかを以下の手順で求める。基準DRRがX線透視画像と一致する場合、位置決め対象の計画からのずれ量は全自由度について0である。
【0035】
位置決め計算装置400(具体的には演算器420)は、位置決め対象位置の基準位置からの仮のずれ量を最適化アルゴリズムにて生成する(ステップS300)。ずれ量は平行移動3自由度,回転3自由度の6自由度の値の組である。最適化アルゴリズムにはパウエル−ブレント法などを用いる。上記の様に6自由度全てについてDRR生成最適化を行うと計算時間が長くなるため、できる限りDRRの平面的な変換でずれを近似したい。しかし、全DRRの投影面に平行な軸の回転(面外回転)はいかなるDRRの面内変換でも近似不能なため分けて扱う。
【0036】
次に、位置決め計算装置400(演算器420)は、生成された仮のずれ量の面外回転の成分を計算する(ステップS400)。面外回転は全てのX線検出器面に平行な軸の回転である。面外回転成分は、ずれ量を表す座標軸の中で面外回転軸と一致する軸がある場合、その一致する軸の値を用いる。一致する軸が無い場合、回転3自由度を成分とするベクトルと、回転軸方向の単位ベクトルとの内積で求める。同様にDRR生成時のずれ量の面外回転成分も求める。
【0037】
位置決め計算装置400(演算器420)は、得られたずれ量の面外回転成分とDRR生成時のずれ量の面外回転成分を比較し、変化量が規定値以上か判断する(ステップS500)。ここで、規定値は予めメモリ430に記憶されている基準値である。この面外回転成分の変化量が既定値より大きい場合、DRRの平面的変換で近似不可能と判断し、治療計画の位置関係から仮のずれ量分だけずれた位置関係においてDRRを再生成する。つまり、規定値以上の場合には、位置決め計算装置400(演算器420)は、基準位置にずれ量を適用した位置関係で全てのDRRを再生成する(ステップS600)。
【0038】
面外回転成分の変化量が規定値以下の場合は、位置決め計算装置400(演算器420)は、ステップS610及びS620で画像を平面変換する。面外回転が無視できるほど小さい場合、画像のずれは少なくとも一つのDRRにおける面内変換(平面変換)で近似できる。
【0039】
このように、ずれ量の面外回転成分が既定値より小さい場合、ずれを各DRRの平面的な変換で近似する。平面内の平行移動2成分と面内の回転を合わせて面内変換と呼び、3次元空間におけるずれ量を面内変換の成分へと射影する。この射影において、面内変換の成分がDRR生成時と比較して変化が少ない場合があり、この場合面内変換は不要となる。そのため本実施例では、面内変換の成分が既定値以上変化した場合のみ、DRRを面内変換する。
【0040】
例えば、DRR投影面に垂直な方向にずれ量が変化する場合、面内変換成分が変化しないため、DRRの面内変換が省略される。X線透視画像の撮影方向が直交している場合には、面内変換の省略可能な方向が増えるため好適である。また、DRRの再生成よりもDRRの面内変換の方が高速なため、面外回転以外のずれを面内変換で近似することで、ずれ評価が高速化される。
【0041】
位置決め計算装置400(演算器420)が面内変換を行う方法を以下で説明する。まず、各DRRに対し、評価するずれ量からDRR生成時のずれ量を引いた、ずれ変化量の面内変換成分を計算する。DRR生成時のずれ量は、DRRがステップS200で生成された基準画像である場合には全成分で0であるが、ステップS600で作り直されたDRRの場合、有限の値を持つ。面内変換の平行移動成分2自由度は、ずれ量の平行移動成分3自由度を成分に持つベクトルと、DRRの面内の単位ベクトルとの内積により求める。面内変換の回転成分1自由度は、ずれ量の回転3自由度を成分とするベクトルとDRR面の単位垂直ベクトルとの内積により求める。以上で各DRRに対する面内変換成分(平行移動2自由度+回転1自由度)が得られるため、位置決め計算装置400(演算器420)はDRRを平面変換する(ステップS620)。ただし、ずれ変化量がDRR面に垂直な場合など、面内変換成分に投影した場合に恒等変換となる場合があり、この場合には変換は必要ない。よって、ステップS620では、面内変換成分が規定値以上変化した場合のみDRRの平面変換を行う。
【0042】
上記ステップS600、あるいはステップS610,S620により変換されたDRRとX線透視画像との類似度を計算する(ステップS700)。まずDRRとX線透視画像の各対の類似度を個別に計算する。類似度には画素値の比較を基にした、画素値の差の2乗和や標準化相互情報量などを用いる。個別に得られた類似度を全て足し合わせ、総類似度とする。この総類似度を位置決め対象ずれ量の評価指標とする。
【0043】
位置決め計算装置400(演算器420)は、得られた総類似度を増大させるよう最適化アルゴリズムにて探索範囲を更新する(ステップS800)。一般に仮のずれ量が探索範囲の端の点よりも総類似度が大きい場合、探索範囲を狭める。例えば、パウエル−ブレント法では探索範囲の端点の総類似度と探索範囲内の試行点での総類似度を比較し、試行点の総類似度が大きければ、試行点を新たな端点として探索範囲を狭める。ここで、総類似度が大きいことはX線透視画像と3次元画像から求めたDRR画像が類似することを示し、最も総類似度が大きい場合にこれらの画像が一致するとみなすことできる。つまり、総類似度を位置決め対象ずれ量の評価指標とし、総類似度が大きいほど、位置決め対象のX線撮影時の真のずれ量に近いと判断する。
【0044】
ステップS800で位置決め計算装置400(演算器420)は更新された探索範囲が収束条件を満たすか判定する(ステップS900)。本実施形態では探索範囲に対して収束条件を設定している。収束条件として、探索範囲が画像解像度よりも十分小さくなること、あるいは放射線照射から要求される位置決め精度を満たすことなどを用いる。探索範囲が治療計画画像の解像度よりも十分小さい場合にはそれ以上の探索は無意味となる。そこで予め、画像解像度を考慮した最小探索範囲をメモリ430に設定しておき、位置決め計算装置400(演算器420)は探索範囲が最小探索範囲以下の領域になった時点で計算を終了する。条件を満たさない場合、位置決め計算装置400(演算器420)はステップS300に戻り、新たな試行点で計算を繰り返す。このように探索範囲が収束条件を満たす場合には計算を終了し、満たさない場合には、再び最適化アルゴリズムにて仮のずれ量を生成し、計算を繰り返す。
【0045】
上記、ステップS100からステップ900により、位置決め対象位置の治療計画からのずれ量が求まるので、最終的にずれを補正するベッド移動量を計算し、ベッドの位置決めを行う(ステップS1000)。
【0046】
本実施例によれば、1組の6自由度変換パラメータに対して全DRRを変換し、総類似度で評価するため、特許文献1のようにDRR毎に変換パラメータを独立に最適化することで生じる最適化計算の重複は生じない。また、DRR毎に最適化をしないため、特許文献2にあるような最適化経路の制限が無く、6自由度空間での最適化をDRR生成数を最小にしたまま実行可能である。また収束を位置決め対象ずれ量の探索範囲で判定するため、平面画像同士の最適化で必要以上に細かい領域内で最適化することがない。
【符号の説明】
【0047】
100 治療ビーム照射装置
120 ベッド
130 位置決め対象
200 第1X線発生装置(X線管)
210 第1X線検出器
220 第2X線発生装置(X線管)
230 第2X線検出器
240 X線透視画像撮影制御装置
300 3次元画像撮影装置
310 画像サーバ
400 位置決め計算装置
410 通信部
420 演算器
430 メモリ
500 治療制御装置
【技術分野】
【0001】
放射線治療におけるベッド位置決め方法に関する。
【背景技術】
【0002】
放射線治療では治療対象の位置を治療計画と一致させるため、治療対象を載せたベッドの位置決めを行う。ベッド位置の決定には、治療計画画像と治療時に撮影するX線透視画像を用いる。体内の治療対象、あるいは治療対象近傍の対象を位置決め対象とし、位置決め対象を含む領域をX線透視撮影し、撮影された画像と治療計画の基準画像との比較から位置決め対象のずれ量を求める。そのずれ量を補正するようベッドの移動量を決定する。粒子線治療やX線IMRTなどでは標的に集中した線量分布が実現可能であり、位置決めにおいても標的位置を計画と高精度で一致させる必要がある。標的位置を高精度に位置決めするため、位置決め対象の平行移動3自由度,回転3自由度の計6自由度に対して計画と治療時のずれを算出することが求められる。また、治療時間短縮のため、ベッド位置決め時間の短縮が求められている。
【0003】
治療計画は治療前に予め撮影された3次元画像に対して行われる。3次元画像には典型的には複数のスライスで構成されるX線CT画像が用いられる。治療計画では3次元画像に写った位置決め対象と放射線照射装置に対する位置関係が計画される。
【0004】
治療時における位置決め対象位置と放射線照射装置の位置関係は、放射線照射装置との位置関係が既知のX線撮影装置によって撮影した位置決め対象のX線透視画像により確認される。X線透視画像を用いるのは位置決め対象の内部構造を基準として位置決めするためである。X線透視画像は典型的には直交する2方向から別々の撮影装置で撮影される。
【0005】
治療計画3次元画像と2次元のX線透視画像の比較では、治療計画3次元画像から数値シミュレーションにて生成したX線透視画像であるDRR(Digitally Reconstracted Radiograph)を生成し、2次元画像同士で比較を行う。DRRの生成では、計画された治療計画画像と放射線治療装置の位置関係を用いる。
【0006】
ただし、2組の対応するX線透視画像とDRRから6自由度のずれを自動的に検出することは困難なことが知られている。平面内の平行移動や平面に垂直な軸に対する回転(面内変換)は高精度で検出可能であるが、平面に平行な軸に対する回転(面外回転)の検出が困難である。
【0007】
6自由度のずれを検出可能とする方法として、計画画像と放射線照射装置の位置関係が治療計画とは異なるDRRを複数生成し、得られたDRRの中で最もX線透視画像と一致するものを選ぶことで、3次元画像とX線透視画像を位置合わせする方法(DRR生成最適化法)が知られている。ただし、全ての自由度に関してDRR生成最適化法を用いると計算時間が長くなるため、平面画像位置合わせを併用し高速化する手法として特許文献1、及び2がある。
【0008】
特許文献1では、各DRRと対応するX線透視画像で面内変換に対しては平面画像位置合わせを行い、面外回転の2自由度に対してはDRR生成最適化を行い、全体として6自由度のずれ量を決定している。
【0009】
特許文献2では、画像に対して面内変換とDRR再生成を組み合わせて画像を位置合わせし、画像のずれ量から患者ずれ量を求める。面内変換を行う場合、面内変換した画像を比較して画像類似度の最大化を行い、その過程で得られた平面画像のずれ量を3次元的な位置決め対象ずれ量へと変換して6自由度のずれ量を決定している。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】US7,204,640
【特許文献2】US7,412,086
【発明の概要】
【発明が解決しようとする課題】
【0011】
治療時間短縮のため、ベッド位置決めにおける計算時間短縮が望まれている。特許文献1に記載の方法では、2組のX線透視画像撮影装置を用いる場合に各画像で6自由度決定するため、複数の画像から重複して決定される自由度が存在することになる。自由度の重複した決定をなくすことで計算時間の短縮の可能性がある。
【0012】
また、特許文献2に記載されている面内変換結果を患者ずれ量に変換する手順では、以下の2点で不必要な計算をする可能性がある。1点目は、最適化の収束判定に関するものである。患者ずれ量の最適化では探索範囲が3次元空間内で十分狭くなった時点で計算を終了し、不必要な計算を省く事が可能と考えられる。しかし、特許文献2の方法では最低でも一回の面内変換後に患者ずれ量が求められるため、患者ずれ量の探索範囲が十分狭いにもかかわらず画像変換が行われる可能性がある。2点目は、最適化における位置パラメータの変化の経路に関するものである。患者ずれ量の最適化では6自由度空間において最適解を探索するが、最適化の経路を制限すると、収束までに多くの試行計算が必要になる可能性がある。例えば、上記手順に従って一つの画像対の面内変換による最適化を行うことは、6自由度のうち3自由度しか変換を許さない最適化となる。他の自由度を変化させるためには、面内変換のずれ量を患者ずれ量に変換し、DRRを再生成し、他の画像対に対して最適化するという手順が必要となる。以上の2点で考えられる不必要な計算を削減することで計算時間の短縮の可能性がある。
【0013】
ベッド位置決めにおける計算時間の短縮には、精度を保ちながら計算量の少ない位置決め方法が必要である。従来法に比べて計算時間を短縮するため、精度を保ちながら計算量を減らすという課題があった。
【課題を解決するための手段】
【0014】
本発明のベッド位置決め方法は、始めに複数方向から撮影されるX線透視画像の組を取得し、治療計画の位置関係に従い、(1)治療計画画像から各画像の撮影方向に対応するDRRを生成し、(2)最適化アルゴリズムにて6自由度の患者ずれ量の仮生成を行う。その後、(3)ずれ量の全DRR投影面に平行な軸の回転成分(面外回転成分)を計算し、(4−A)面外回転成分が規定値より大きい場合にはずれ量に基づいた位置関係で全DRRを作り直し、(4−B)面外回転成分が規定値より小さい場合には、ずれ量の各DRRの面内変換成分を計算し、面内変換成分がDRR生成時から規定位置以上になった場合にDRRを平面変換する。次に、(5)DRRとX線透視画像の各対で類似度の総和である総類似度を計算し、(6)総類似度を増大させるよう最適化アルゴリズムにて探索範囲を更新する。(7)上記(2)から(6)を繰り返し、最適化の探索範囲が規定の収束条件を満たすと計算を終了する。(8)得られた位置決め対象ずれ量を補正するベッド移動量を計算してベッド位置決めする。
【発明の効果】
【0015】
上記方法により高速な6自由度のベッド位置決めが可能となり、ベッド位置決め時間の短縮が可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態を示すシステム図。
【図2】本発明の実施例における処理フローを示す図。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明を実施するための形態を説明する。
〔実施例1〕
図1に示すように、本実施例のベッド位置決め装置101,第1X線発生装置(X線管)200と第1X線検出器210を有する第1X線透視画像撮影装置,第2X線発生装置(X線管)220と第2X線検出器230を有する第2X線透視画像撮影装置,X線透視画像撮影制御装置240,位置決め計算装置400,治療制御装置500,図示しない入力手段(キーバード,マウス等)を備える。
【0018】
第1X線発生装置(X線管)200は治療ビーム照射装置100に取り付けられ、治療ビーム照射装置100の移動(回転)とともに移動(回転)可能な構成を有する。第1X線検出器210は治療ビームのビームライン上に位置しており、ベッド120を基準として治療ビーム照射装置100の反対側に配置される。また、第2X線透視画像撮影装置も移動可能な構成を有する。第2X線検出器230は、第2X線発生装置220から放射されて照射対象を透過したX線を検出する位置に配置される。つまり、第2X線発生装置220が移動すると、第2X線検出器230も移動してX線を検出する位置に設置される。
【0019】
X線透視画像撮影制御装置240は、第1X線透視画像撮影装置及び第2X線透視画像撮影装置に接続され、これらを制御する。具体的には、X線透視画像撮影制御装置240は、第1X線発生装置200及び第2X線発生装置220からのX線の照射開始及び照射停止の制御や、第1X線検出器210及び第2X線検出器230からのX線検出信号に基づく画像データの作成や、これらを設置する位置を制御する。
【0020】
位置決め計算装置400は、通信部410,演算器420及びメモリ430を有する。位置決め計算装置400(具体的には通信部410)が、治療計画画像撮影装置102,治療制御装置500及びX線透視画像撮影制御装置240に接続されている。通信部410は、演算部420を介してメモリ430に接続される。
【0021】
治療制御装置500がベッド120に接続される。治療制御装置500は、位置決め計算装置400の演算結果に基づいて、ベッド120の位置決め制御をする。
【0022】
治療計画画像撮影装置102は、3次元画像撮影装置300及び画像サーバ310を有する。
【0023】
放射線治療システムではベッド120上の治療対象に治療ビーム照射装置100から治療ビームを照射する。治療時に位置決め対象130を治療ビーム照射装置100に対して計画通りの位置に配置するため、X線透視画像を撮影する。以下、ベッド位置決め装置101を用いてベッド120を位置決めする方法について説明する。
【0024】
治療ビームによる治療を開始するために位置決め対象(患者)130がベッド120にのせられると、医者等の操作者は、患者130の体表面に描かれた十字マーク(患部の真上にレーザーで表示されたマーク等)がビームライン上に位置するように、入力装置(図示せず)を用いて治療制御装置500にベッドの移動指令を入力する。治療制御装置500は、その移動指令に基づいてベッド120を移動させ、体表面の十字マークがビームライン上に一致するように制御する。
【0025】
操作者は、X線透視画像撮影装置の移動開始信号を、入力装置(図示せず)からX線透視画像撮影制御装置240に入力する。移動開始信号を受信したX線透視画像撮影制御装置240は、第1X線透視画像撮影装置及び第2X線透視画像撮影装置を移動させて所定の位置に配置する。第1X線透視画像撮影装置及び第2X線透視画像撮影装置は、患者130のX線撮影方向が直交する2方向となるように配置されている。その後、操作者がX線照射開始信号をX線透視画像撮影制御装置240に入力すると、X線透視画像撮影制御装置240からの指示で第1X線発生装置200及び第2X線発生装置220からX線を照射し、第1X線検出器210及び第2X線検出器230で透過X線を検出する。第1X線検出器210及び第2X線検出器230は、透過X線を検出するとX線透視画像撮影制御装置240にX線検出信号を出力する。X線透視画像撮影制御装置240はこれらのX線検出信号に基づいて画像データを作成する。前述の通り、X線撮影方向は直交する2方向である。作成された画像データ(現在画像データ)は、位置決め計算装置400に出力される。
【0026】
位置決め計算装置400は、X線透視画像撮影制御装置240から、通信部410を通して画像データを受信し、演算器420がメモリ430に画像データを保存する。
【0027】
治療計画時に用いる3次元画像は3次元画像撮影装置300で撮影する。撮影された画像データは画像サーバ310に保存される。治療時に位置決め計算装置400が通信部を介して画像サーバから3次元画像を取得し、メモリ430に保存する。
【0028】
位置決め計算装置400では、X線透視画像と3次元画像データが保存されると、演算器420は3次元画像データからDRRを計算する。演算器はDRRとX線透視画像の比較を行い、最適化手順によりX線透視画像と3次元画像中の位置決め対象位置を対応付け、位置決め対象位置の計画からのずれを求める。演算器420は最終的に位置決め対象位置のずれから、ずれを補正するベッド移動量を求める。
【0029】
操作者の指示により、計算されたベッド移動量は位置決め計算装置400から治療制御装置500に送られる。治療制御装置500は、受信したベッド移動量に基づいて、ベッド120を移動して位置決め制御される。
【0030】
本実施例の位置決め計算装置400は、X線透視画像撮影制御装置240から受信した現在画像データ及び治療計画画像撮影装置102の画像サーバ310に記憶されていた画像データを用いて、ベッド120の位置決めデータを生成し、この位置決めデータを治療制御装置500に出力する。以下、位置決め装置400が位置決めデータを生成する処理手段を、図2のフローチャートを参照しながら説明する。なお、このような処理手段は位置決め計算装置400のメモリ430に格納されている。
【0031】
まず、位置決め計算装置400は操作者の指示により、予め3次元画像撮影装置300で撮影され画像サーバ310に保存された位置決め対象の3次元画像データを通信部410を通して取得し、メモリ430に保存する(ステップ100)。
【0032】
患者130の患部を治療ビームライン上に位置決めするに際し、ベッド120に乗せられた位置決め対象130の第1及び第2のX線透視画像を撮影する(ステップS150)。それぞれのX線透視画像は第1及び第2のX線透視画像撮影装置によって撮影される。撮影された現在画像データはX線画像撮影制御装置240から位置決め計算装置400に送られる。位置決め計算装置400はこの現在画像データを通信部410で受信し、演算器420を介してメモリ430に保存する。
【0033】
位置決め計算装置400は、治療計画時に3次元画像撮影装置300で撮影した3次元画像と第1及び第2のX線透視画像撮影装置の計画された位置関係に従ってDRRを計算する(ステップS200)。DRRは、画素毎に対応するX線検出器の領域とX線源(X線発生装置のX線を放射する点)の間を結ぶ直線上において、3次元画像の画素値から変換された物質量を積算し、最終的にX線透過率に変換することで計算する。
【0034】
治療計画の位置関係を基準位置とし、基準位置で計算されたDRRを基準DRRとする。位置決め計算装置400は、X線透視画像撮影時の位置決め対象位置130が基準位置からどれだけずれているかを以下の手順で求める。基準DRRがX線透視画像と一致する場合、位置決め対象の計画からのずれ量は全自由度について0である。
【0035】
位置決め計算装置400(具体的には演算器420)は、位置決め対象位置の基準位置からの仮のずれ量を最適化アルゴリズムにて生成する(ステップS300)。ずれ量は平行移動3自由度,回転3自由度の6自由度の値の組である。最適化アルゴリズムにはパウエル−ブレント法などを用いる。上記の様に6自由度全てについてDRR生成最適化を行うと計算時間が長くなるため、できる限りDRRの平面的な変換でずれを近似したい。しかし、全DRRの投影面に平行な軸の回転(面外回転)はいかなるDRRの面内変換でも近似不能なため分けて扱う。
【0036】
次に、位置決め計算装置400(演算器420)は、生成された仮のずれ量の面外回転の成分を計算する(ステップS400)。面外回転は全てのX線検出器面に平行な軸の回転である。面外回転成分は、ずれ量を表す座標軸の中で面外回転軸と一致する軸がある場合、その一致する軸の値を用いる。一致する軸が無い場合、回転3自由度を成分とするベクトルと、回転軸方向の単位ベクトルとの内積で求める。同様にDRR生成時のずれ量の面外回転成分も求める。
【0037】
位置決め計算装置400(演算器420)は、得られたずれ量の面外回転成分とDRR生成時のずれ量の面外回転成分を比較し、変化量が規定値以上か判断する(ステップS500)。ここで、規定値は予めメモリ430に記憶されている基準値である。この面外回転成分の変化量が既定値より大きい場合、DRRの平面的変換で近似不可能と判断し、治療計画の位置関係から仮のずれ量分だけずれた位置関係においてDRRを再生成する。つまり、規定値以上の場合には、位置決め計算装置400(演算器420)は、基準位置にずれ量を適用した位置関係で全てのDRRを再生成する(ステップS600)。
【0038】
面外回転成分の変化量が規定値以下の場合は、位置決め計算装置400(演算器420)は、ステップS610及びS620で画像を平面変換する。面外回転が無視できるほど小さい場合、画像のずれは少なくとも一つのDRRにおける面内変換(平面変換)で近似できる。
【0039】
このように、ずれ量の面外回転成分が既定値より小さい場合、ずれを各DRRの平面的な変換で近似する。平面内の平行移動2成分と面内の回転を合わせて面内変換と呼び、3次元空間におけるずれ量を面内変換の成分へと射影する。この射影において、面内変換の成分がDRR生成時と比較して変化が少ない場合があり、この場合面内変換は不要となる。そのため本実施例では、面内変換の成分が既定値以上変化した場合のみ、DRRを面内変換する。
【0040】
例えば、DRR投影面に垂直な方向にずれ量が変化する場合、面内変換成分が変化しないため、DRRの面内変換が省略される。X線透視画像の撮影方向が直交している場合には、面内変換の省略可能な方向が増えるため好適である。また、DRRの再生成よりもDRRの面内変換の方が高速なため、面外回転以外のずれを面内変換で近似することで、ずれ評価が高速化される。
【0041】
位置決め計算装置400(演算器420)が面内変換を行う方法を以下で説明する。まず、各DRRに対し、評価するずれ量からDRR生成時のずれ量を引いた、ずれ変化量の面内変換成分を計算する。DRR生成時のずれ量は、DRRがステップS200で生成された基準画像である場合には全成分で0であるが、ステップS600で作り直されたDRRの場合、有限の値を持つ。面内変換の平行移動成分2自由度は、ずれ量の平行移動成分3自由度を成分に持つベクトルと、DRRの面内の単位ベクトルとの内積により求める。面内変換の回転成分1自由度は、ずれ量の回転3自由度を成分とするベクトルとDRR面の単位垂直ベクトルとの内積により求める。以上で各DRRに対する面内変換成分(平行移動2自由度+回転1自由度)が得られるため、位置決め計算装置400(演算器420)はDRRを平面変換する(ステップS620)。ただし、ずれ変化量がDRR面に垂直な場合など、面内変換成分に投影した場合に恒等変換となる場合があり、この場合には変換は必要ない。よって、ステップS620では、面内変換成分が規定値以上変化した場合のみDRRの平面変換を行う。
【0042】
上記ステップS600、あるいはステップS610,S620により変換されたDRRとX線透視画像との類似度を計算する(ステップS700)。まずDRRとX線透視画像の各対の類似度を個別に計算する。類似度には画素値の比較を基にした、画素値の差の2乗和や標準化相互情報量などを用いる。個別に得られた類似度を全て足し合わせ、総類似度とする。この総類似度を位置決め対象ずれ量の評価指標とする。
【0043】
位置決め計算装置400(演算器420)は、得られた総類似度を増大させるよう最適化アルゴリズムにて探索範囲を更新する(ステップS800)。一般に仮のずれ量が探索範囲の端の点よりも総類似度が大きい場合、探索範囲を狭める。例えば、パウエル−ブレント法では探索範囲の端点の総類似度と探索範囲内の試行点での総類似度を比較し、試行点の総類似度が大きければ、試行点を新たな端点として探索範囲を狭める。ここで、総類似度が大きいことはX線透視画像と3次元画像から求めたDRR画像が類似することを示し、最も総類似度が大きい場合にこれらの画像が一致するとみなすことできる。つまり、総類似度を位置決め対象ずれ量の評価指標とし、総類似度が大きいほど、位置決め対象のX線撮影時の真のずれ量に近いと判断する。
【0044】
ステップS800で位置決め計算装置400(演算器420)は更新された探索範囲が収束条件を満たすか判定する(ステップS900)。本実施形態では探索範囲に対して収束条件を設定している。収束条件として、探索範囲が画像解像度よりも十分小さくなること、あるいは放射線照射から要求される位置決め精度を満たすことなどを用いる。探索範囲が治療計画画像の解像度よりも十分小さい場合にはそれ以上の探索は無意味となる。そこで予め、画像解像度を考慮した最小探索範囲をメモリ430に設定しておき、位置決め計算装置400(演算器420)は探索範囲が最小探索範囲以下の領域になった時点で計算を終了する。条件を満たさない場合、位置決め計算装置400(演算器420)はステップS300に戻り、新たな試行点で計算を繰り返す。このように探索範囲が収束条件を満たす場合には計算を終了し、満たさない場合には、再び最適化アルゴリズムにて仮のずれ量を生成し、計算を繰り返す。
【0045】
上記、ステップS100からステップ900により、位置決め対象位置の治療計画からのずれ量が求まるので、最終的にずれを補正するベッド移動量を計算し、ベッドの位置決めを行う(ステップS1000)。
【0046】
本実施例によれば、1組の6自由度変換パラメータに対して全DRRを変換し、総類似度で評価するため、特許文献1のようにDRR毎に変換パラメータを独立に最適化することで生じる最適化計算の重複は生じない。また、DRR毎に最適化をしないため、特許文献2にあるような最適化経路の制限が無く、6自由度空間での最適化をDRR生成数を最小にしたまま実行可能である。また収束を位置決め対象ずれ量の探索範囲で判定するため、平面画像同士の最適化で必要以上に細かい領域内で最適化することがない。
【符号の説明】
【0047】
100 治療ビーム照射装置
120 ベッド
130 位置決め対象
200 第1X線発生装置(X線管)
210 第1X線検出器
220 第2X線発生装置(X線管)
230 第2X線検出器
240 X線透視画像撮影制御装置
300 3次元画像撮影装置
310 画像サーバ
400 位置決め計算装置
410 通信部
420 演算器
430 メモリ
500 治療制御装置
【特許請求の範囲】
【請求項1】
複数方向から撮影されたX線透視画像と3次元画像を用いたベッド位置決め方法であって、
(1)3次元画像からX線透視画像のそれぞれに対応するDRRを計算する手順と、
(2)最適化アルゴリズムにて仮の位置決め対象のずれ量を作成する手順と、
(3)前記ずれ量の全DRR投影面に平行な軸の回転成分(面外回転成分)を計算する手順と、
(4−A)面外回転成分がDRR生成時と比較して規定値以上変化した場合にはずれ量に基づいた位置関係で全DRRを作り直す手順と、
(4−B)面外回転成分の変化量が前記規定値より小さい場合には、前記ずれ量の各DRRの面内変換成分を計算し、面内変換成分がDRR生成時から前記規定値以上変化した場合にDRRを平面変換する手順と、
(5)DRRとX線透視画像の各対で類似度の総和である総類似度を計算する手順と、
(6)前記総類似度を増大させるよう最適化アルゴリズムにて探索範囲を更新する手順と、
(7)(2)から(6)を繰り返し、最適化の探索範囲が規定の収束条件を満たすと計算を終了する手順と、
(8)得られた位置決め対象ずれ量を補正するベッド移動量を計算する手順を有することを特徴とするベッド位置決め方法。
【請求項2】
直交する2方向から前記X線透過画像を撮影することを特徴とする請求項1に記載のベッド位置決め方法。
【請求項1】
複数方向から撮影されたX線透視画像と3次元画像を用いたベッド位置決め方法であって、
(1)3次元画像からX線透視画像のそれぞれに対応するDRRを計算する手順と、
(2)最適化アルゴリズムにて仮の位置決め対象のずれ量を作成する手順と、
(3)前記ずれ量の全DRR投影面に平行な軸の回転成分(面外回転成分)を計算する手順と、
(4−A)面外回転成分がDRR生成時と比較して規定値以上変化した場合にはずれ量に基づいた位置関係で全DRRを作り直す手順と、
(4−B)面外回転成分の変化量が前記規定値より小さい場合には、前記ずれ量の各DRRの面内変換成分を計算し、面内変換成分がDRR生成時から前記規定値以上変化した場合にDRRを平面変換する手順と、
(5)DRRとX線透視画像の各対で類似度の総和である総類似度を計算する手順と、
(6)前記総類似度を増大させるよう最適化アルゴリズムにて探索範囲を更新する手順と、
(7)(2)から(6)を繰り返し、最適化の探索範囲が規定の収束条件を満たすと計算を終了する手順と、
(8)得られた位置決め対象ずれ量を補正するベッド移動量を計算する手順を有することを特徴とするベッド位置決め方法。
【請求項2】
直交する2方向から前記X線透過画像を撮影することを特徴とする請求項1に記載のベッド位置決め方法。
【図1】


【図2】
【図2】
【公開番号】特開2010−246733(P2010−246733A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−99518(P2009−99518)
【出願日】平成21年4月16日(2009.4.16)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月16日(2009.4.16)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]