
ベッド位置決め装置及びその位置決め方法
【課題】操作者の技量に関係なく常に十分な位置決め精度を確保する。
【解決手段】粒子線照射部4から患者8の患部へイオンビームを出射するために、患者ベッド59の位置決めを行うベッド位置決め装置において、粒子線照射部4からのビームラインmに沿ってX線を出射するX線放出装置26と、X線を入射して画像処理するX線透視画像撮影装置29と、その処理画像信号に基づき、患部の現在画像を表示するディスプレイ装置39Bと、患部について予め用意した基準X線画像を表示するディスプレイ装置39Aと、基準X線画像のうちアイソセンタを含む比較領域Aと、現在画像における比較領域B又は最終比較領域Bとの間のパターンマッチングを行い、照射時における患者ベッド59の位置決め用のデータを生成する位置決めデータ生成装置37とを有する。
【解決手段】粒子線照射部4から患者8の患部へイオンビームを出射するために、患者ベッド59の位置決めを行うベッド位置決め装置において、粒子線照射部4からのビームラインmに沿ってX線を出射するX線放出装置26と、X線を入射して画像処理するX線透視画像撮影装置29と、その処理画像信号に基づき、患部の現在画像を表示するディスプレイ装置39Bと、患部について予め用意した基準X線画像を表示するディスプレイ装置39Aと、基準X線画像のうちアイソセンタを含む比較領域Aと、現在画像における比較領域B又は最終比較領域Bとの間のパターンマッチングを行い、照射時における患者ベッド59の位置決め用のデータを生成する位置決めデータ生成装置37とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ベッド位置決め装置及びその位置決め方法に係り、特に、陽子及び炭素イオン等の荷電粒子ビーム(イオンビーム)を患部に照射して治療する粒子線治療装置に適用するのに好適なベッド位置決め装置及びその位置決め方法に関する。
【背景技術】
【0002】
癌などの患者の患部にアイソセンタ(照射目標中心)を設定して陽子等のイオンビームを照射する治療方法が知られている。この治療に用いる装置は、荷電粒子ビーム発生装置、ビーム輸送系、及び回転式の照射装置を備えている。荷電粒子ビーム発生装置で加速されたイオンビームは、第1ビーム輸送系を経て照射装置に達し、照射装置に備えられた第2ビーム輸送系を通って照射ノズルから患者の患部に照射される。
【0003】
この場合、イオンビームがアイソセンタのみに放射され正常な細胞を傷つけないように、照射ノズルに対し患者が正しい位置に配置されなければならない。粒子線照射用患者ベッド位置決め装置は、このための患者ベッドの位置決めを行う装置である(例えば、特許文献1参照)。特に、例えばイオンビームである陽子ビームの照射では、陽子が停止するに至ったときに陽子エネルギーの大部分が放出される(=ブラッグピーク)という特性を利用し、陽子ビームの起動エネルギーを選択することで陽子をアイソセンタで停止させてエネルギーの大部分をアイソセンタに位置する患部の細胞にのみ与える。このため、上記位置決めは非常に重要である。
【0004】
ここで、上記従来の患者ベッド位置決め装置においては、照射ノズルに対する患者の正確な配置を確実に行うため、予め、患者の体における特定のモニュメント(又はランドマーク、解剖学的基準点;例えば患者の骨格上の部分等)に対するアイソセンタの位置が決定される。通常は、例えば腫瘍のような傷んだ組織を含むアイソセンタの位置が例えばデジタル再構成ラジオグラフ(DRR : digitally reconstructed radiograph)上においてマーキングされ、必要に応じて他の方向から見た表示用の像が編集される。
【0005】
陽子ビームの照射に先立って患者が患者ベッドに横臥すると、陽子ビームの進路上にX線源が配置されるとともに、陽子ビームの進路に沿って患者と反対側にX線受像器が配置される。X線受像器は、患者の患部及びその周辺のX線画像を生成する。このとき、照射ノズル中において陽子ビームが通るビームラインにあるアイソセンタにある患部を位置決めさせるために、X線画像における上記特定のモニュメントからのX線ビーム中心までのオフセット距離と、上記DRR上における同じモニュメントからのアイソセンタまでのオフセット距離とを用いて、患者ベッドの照射ノズルに対しての移動方向及び移動距離を求めなければならない。この位置決め方向及び移動距離を用いて患者ベッドの位置決め制御が行われる。
【0006】
【特許文献1】特表2000−510023号公報(第27−31頁、図1,6,7A,7B)
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記従来技術では、例えば医者等の操作者が、表示装置に表示された基準画像であるDRR上で、患者の骨格上の複数のモニュメント位置をいくつか指定すると共に、表示装置に表示された、X線受像器による上記X線画像であるキャプチャー画像上でも、同じ複数のモニュメントの同じ位置を指定する。このため、操作者が両画面上での同じ複数のモニュメントの同じ位置を指定したつもりであっても、DRR上とキャプチャー画像上において対応するそれぞれの指定位置が一致せず、ずれる恐れがある。DRR及びキャプチャー画像上で一致すべき各指定位置がずれた場合には、これらを元に位置決めされる患者ベッド(特に患部)のビームラインに対する位置決め精度が悪くなる。
【0008】
本発明の目的は、ベッドの位置決め精度を更に向上できるベッド位置決め装置及びその位置決め方法を提供することにある。
【課題を解決するための手段】
【0009】
上記した目的を達成する本発明の特徴は、演算処理装置で、アイソセンタを含む基準となる第1画像情報のうち、アイソセンタを含む第1設定領域内の第1画像情報と、荷電粒子ビーム進路内に位置する患者の部位に対する第2画像情報のうち、荷電粒子ビーム進路に対応する位置を含む第2設定領域内の第2画像情報とのパターンマッチングを行い、ベッドの位置決めに用いる情報を生成することにある。第1設定領域内の第1画像情報と第2設定領域内の第2画像情報とのパターンマッチングにより位置決め用情報を生成することにより、操作者が位置を指定したモニュメントに基づき位置決め用情報を生成する場合のように、モニュメントの位置指定といった操作者技量が位置決め用情報の生成精度に影響を与えることはない。すなわち、操作者の技量に関係なく、位置決め精度を向上できる。
【発明の効果】
【0010】
本発明によれば、操作者の技量に関係なく常に十分な位置決め精度を確保することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の一実施形態を図面を参照しつつ説明する。
【0012】
本実施形態の患者ベッド位置決め装置の適用対象である医療用粒子線照射装置を、図1及び図2を用いて説明する。
【0013】
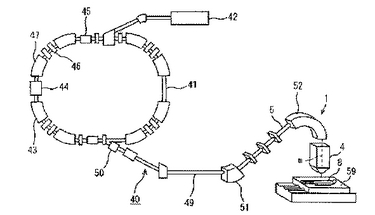
医療用粒子線照射装置40は、荷電粒子ビーム発生装置41及び回転ガントリー1を備える。荷電粒子ビーム発生装置(粒子線発生装置)41は、イオン源(図示せず)、前段加速器42及びシンクロトロン43を有する。イオン源で発生したイオン(例えば、陽子イオン(または炭素イオン))は前段加速器(例えば直線加速器)42で加速される。前段加速器42から出射されたイオンビーム(陽子ビーム)はシンクロトロン43に入射される。本実施形態では、イオンビームとして陽子ビームが用いられる。荷電粒子ビーム(粒子線)であるそのイオンビームは、シンクロトロン43で、高周波加速空胴44から印加される高周波電力によってエネルギーを与えられて加速される。シンクロトロン43内を周回するイオンビームのエネルギーが設定されたエネルギー(通常は100〜200MeV)までに高められた後、出射用の高周波印加装置45から高周波がイオンビームに印加される。安定限界内で周回しているイオンビームは、この高周波の印加によって安定限界外に移行し、出射用デフレクタ50を通ってシンクロトロン43から出射される。イオンビームの出射の際には、シンクロトロン43に設けられた四極電磁石46及び偏向電磁石47等の電磁石に導かれる電流が設定値に保持され、安定限界もほぼ一定に保持されている。高周波印加装置45への高周波電力の印加を停止することによって、シンクロトロン43からのイオンビームの出射が停止される。
【0014】
シンクロトロン43から出射されたイオンビームは、ビーム輸送系49を経てイオンビームを出射する粒子線照射部(粒子線照射装置)4に達する。イオンビームは、粒子線照射部4から治療用ベッド(患者ベッド)59に載っている患者8の患部(癌の患部)に照射される。粒子線照射部4は、粒子線治療に最適な線量分布を形成するイオンビームを生成する。
【0015】
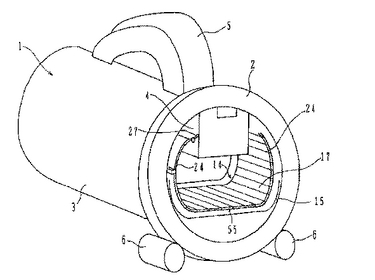
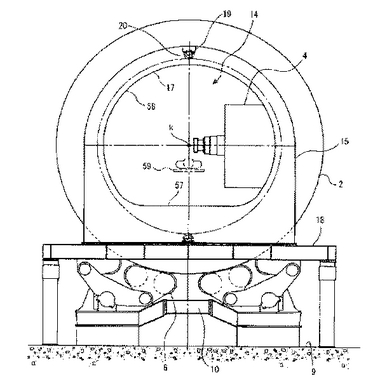
回転ガントリー1は、フロントリング2を有する略筒状の回転胴(回転体)3及び図示されていないが回転胴3を回転させるモータ(回転装置、(図示せず))を備える。回転胴3の一端部に設けられたフロントリング2は、回転可能な複数のサポートロール6によって支持される。これらのサポートロール6は、図3に示されるように、回転ガントリー設置領域(建屋基礎)9に設置された支持装置10に回転自在に取り付けられる。図示されていないが、回転胴3の他端部に設けられた他のリング(外径はフロントリング2のそれに等しい)も、別の支持装置10に回転自在に取り付けられた複数のサポートロール6によって支持される。ビーム輸送系49の一部である逆U字状のビーム輸送装置5、及び粒子線照射部4は、回転胴3に設置され、回転ガントリー1の回転に伴って回転する。ビーム輸送装置5は偏向電磁石51,52等の電磁石を有する。治療ゲージ(治療室)14が回転胴3内に形成される。
【0016】
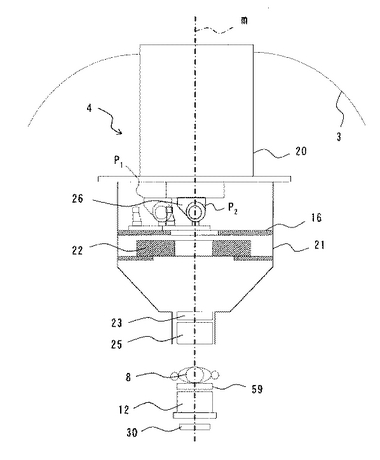
図4は、粒子線照射部4の縦断面構造を表す模式図である。この図4において、粒子線照射部4は、回転胴3に取り付けられ前述の逆U字状のビーム輸送装置5に接続されるケーシング20とさらにこのケーシング20のノズル先端側に設けられるスノート21を有している。ケーシング20及びスノート21内には、ビーム輸送装置5より導入されるイオンビーム進行方向の上流側より、例えば散乱体装置(図示せず)、リングコリメータ22、患者コリメータ23、ボーラス25を配置する。これらは、イオンビームが通るビームラインmに沿って配置される。それらのほかに、例えばリッジフィルタタイプのSOBP形成装置、及び2枚一組の楔型ブロックを備えた飛程調整装置等をビームラインm上に配置してもよい。
【0017】
リングコリメータ22はイオンビームの照射野を粗くコリメートするものであり、図示しない取付け部材を介しスノート21に取りつけられている。患者コリメータ23は、ビームラインmと直行する方向における患部形状に合わせてビームを整形するものであり、図示しない取付け部材を介しスノート21に取りつけられている。
【0018】
以上のような構成の粒子線照射部4により形成された照射野を有するイオンビームは、患者8の患部においてそのエネルギーを放出し、高線量領域を形成する。
【0019】
なお、X線源であるX線放出装置(X線管)26については、後述する。
【0020】
図2及び図3に戻り、医療用粒子線照射装置40は、粒子線治療用照射室55を回転ガントリー1の回転胴3内に設けている。粒子線治療用照射室55は、固定された環状フレーム(リング部材)15を備える。この環状フレーム15は、回転胴3のフロントリング2側に配置され、回転ガントリー設置領域9に設置された架台18に固定されている。このとき、環状フレーム15との間に粒子線照射部4の移動経路を挟むように、回転胴3の他端部側に他の環状フレーム(図示せず)が配置される。この他の環状フレームは、回転胴3の内面に固定されたサポートフレーム19に回転自在に取り付けられた複数のサポートロール20に支持される。すなわち、この他の環状フレームはサポートロール20によって回転胴3と相対的に回転可能になっている。これら環状フレーム15等は、対向するそれぞれ側面側に、下側に水平部及び上側に円弧部を有するガイド溝(図示せず)を備えている。ガイド溝は、その水平部及び円弧部によりかまぼこ状の溝になっている。
【0021】
粒子線治療用照射室55はまた、移動床17を備える。この移動床17は、多数の板24を有し、隣接する板24どうしをリンク(図示せず)で連結し屈曲自在な連設構造となっている。移動床17の一端部は環状フレーム15の上記ガイド溝と係合し、移動床17の他端部は前述の他の環状フレームのガイド溝と係合している。また、移動床17は、その円周方向両端部それぞれが粒子線照射部4に接続されている。回転ガントリー1がモータの駆動により回転した場合、粒子線照射部4もその回転方向へ移動する。粒子線照射部4に接続されている移動床17も引っ張られてその回転方向へ移動する。移動床17の移動は、上記環状フレーム15等の各ガイド溝に沿って円滑に行われる。移動床17は、各ガイド溝の水平部によって環状フレーム15等の下側に水平床部57、各ガイド溝の円弧部によって環状フレーム15等の上側に円弧壁部58を形成する。治療ゲージ14がその移動床17の内側に形成される。治療用ベッド59が、粒子線照射部4からイオンビームを照射するときには、治療ゲージ14内に挿入される。
【0022】
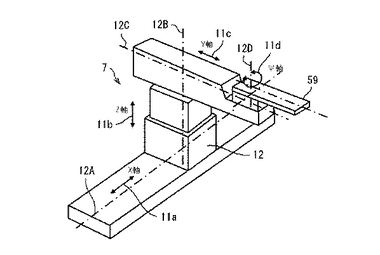
図5に示すように、治療台7は、ベッド駆動装置12及びベッド駆動装置12に設置された治療用ベッド59を有する。治療台7は、回転ガントリー1の外側でフロントリング1に対向して設けられ、回転ガントリー設置領域9(図3参照)より一段高くなった治療台取付領域(図示せず)の上面に設置される。ベッド駆動装置12は、図5に概念的に示すように、4つの関節軸12A,12B,12C,12Dを備え、治療用ベッド59を駆動するモータ11a,11b,11c,11dを備える。治療用ベッド59はモータ11aの駆動によりフロントリング1と平行で水平方向に伸びる関節軸12A(X軸)の方向に移動される。治療用ベッド59はモータ11bの駆動により関節軸12Aに対して垂直な関節軸12B(Z軸)の方向に移動される。治療用ベッド59はモータ11cの駆動により関節軸12A(X軸)及び関節軸12B(Z軸)のそれぞれに対して直角で回転ガントリー1の回転軸の方向に伸びる関節軸12C(Y軸)の方向に移動される。すなわち、治療用ベッド59はモータ11cの駆動により治療ゲージ14内に出し入れされる。治療用ベッド59はモータ11dの駆動により関節軸12C(Y軸)に対して垂直な関節軸12D(Ψ軸)まわりに回転される。
【0023】
以上のような基本構成の医療用粒子線照射装置40に、本実施形態の患者ベッド位置決め装置が設けられている。以下、その構成及び機能を詳細に説明する。
【0024】
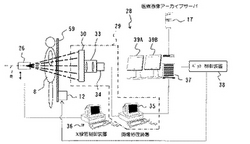
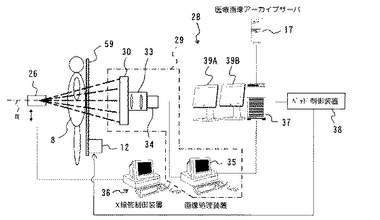
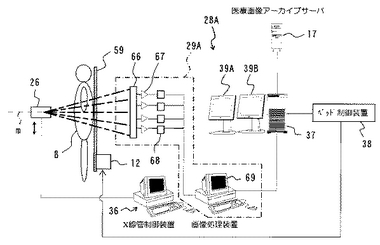
本実施形態の患者ベッド位置決め装置28は、図6に示すように、X線放出装置(X線源)26、X線透視画像撮影装置(画像情報発生装置)29、X線源制御装置36、図示しない入力手段(キーボード、マウス等)を有する位置決めデータ生成装置(位置決め情報生成装置)37、医療画像アーカイブサーバ17、ベッド制御装置38、及びディスプレイ装置39A,39Bを備える。位置決めデータ生成装置37はワークステーション(演算処理装置)である。
【0025】
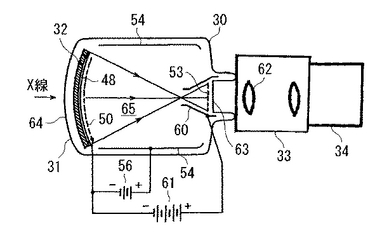
X線透視画像撮影装置29は、X線蛍光増倍管(X線イメージインテンシファイア)30、光学系33及びCCDカメラ(画像情報生成装置)34を有する。X線蛍光増倍管30は、図7に示すように、真空の容器31内で、蛍光膜基板32を入力窓64側に、出力蛍光膜53を出力窓63側に配置している。蛍光膜基板32は、裏面(入力窓64と反対側の面)に入力蛍光膜(X線入射装置、X線変換装置)48を有する。出力蛍光膜53の直径は入力蛍光膜48のそれよりも小さい。光電陰極50が入力蛍光膜48に接触して配置される。集束電極54が光電子通路65を取り囲むように容器31内に設置される。出力蛍光膜53を取り囲む陽極60が容器31内に設置される。光電陰極50と集束電極54との間には、集束電源56より電圧が印加される。また、光電陰極5と陽極60との間には陽極電源61より電圧が印加される。
【0026】
X線透視画像撮影装置29は、回転ガントリー1の回転胴3に取り付けられ、回転ガントリー1の回転と共に回転する。X線透視画像撮影装置29は、ビームラインm上に位置しており、治療用ベッド59を基準として粒子線照射部4の反対側に配置される。
【0027】
X線放出装置26は、図4に示したように、スノート21に21に取り付けられた支持部材16上にビームラインmと直交する方向に移動可能に設けられている。支持部材16は、イオンビーム及びX線が通る開口部を有する。X線放出装置26は、通常(例えば、イオンビームの照射中等の治療用ベッド59の位置合せ以外のとき)、ビームラインmから離れた位置P1に退避している。
【0028】
イオンビーム照射による治療を開始するために患者8が治療用ベッド59に横臥すると、医者等の操作者は、患者8の体表面に描かれた十字マーク(患部の真上にレーザーで表示)がビームラインm上に位置させるように、ベッド制御装置38の入力装置(図示せず)を用いてベッド制御装置38に治療用ベッド59の移動指令を入力する。ベッド制御装置38は、その移動指令に基づいてベッド駆動装置12を制御して治療用ベッド59を移動させ、体表面の十字マークをビームラインmに一致させる。この位置合わせにより、患部とビームラインmとのずれ量はミリメートルオーダの範囲内となる。
【0029】
操作者は、X線放出装置26の前進駆動の開始指令を、入力手段(図示せず)を介して例えばパソコンであるX線源制御装置36に入力する。開始指令を入力したX線源制御装置36は、X線源移動信号をX線放出装置26の図示されていない駆動装置(例えば、モータ)に出力する。これにより、X線放出装置26がビームラインm上の位置P2まで前進移動される。その後、操作者がX線照射開始指令をX線源制御装置36に入力したとき、X線源制御装置36から出力されたX線照射開始信号がX線放出装置26へ入力され、これに応じてX線放出装置26がX線ビームをビームラインmに沿い患者8に向かって照射する。
【0030】
患者8を透過したX線は、入力窓64から容器31内に入力され、蛍光膜基板32を通って入力蛍光膜53に達して可視光像に変換される。可視光像の光は光電陰極50で光電子に変換される。この光電子は集束電極54によって集束され、光電子通路65及び陽極60内を通って出力蛍光膜53に到達して明るい可視光像に変換される。この可視光像は光学系33内のレンズ62を介してCCDカメラ34によって撮影される。CCDカメラ34によって撮影された画像は、第1演算装置としてのパソコン(画像処理装置)35に入力される。画像処理装置35は、その画像に対して所定の演算処理が行われ、画像処理(例えば色彩的な修正、ぼけの修正等)が施される。このような画像処理が施された、患部を含む画像データ(現在画像データ(キャプチャ画像データ))が、画像処理装置35から位置決めデータ生成装置37に入力される。
【0031】
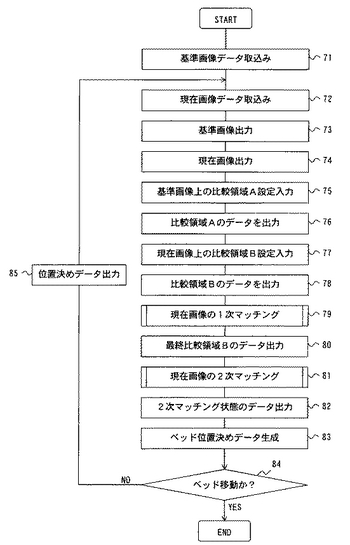
位置決めデータ生成装置37は、X線透視画像装置29から出力された現在画像データ、及び医療画像アーカイブサーバ17に記憶されている画像データを用いて、治療用ベッド59の位置決めデータを生成し、この位置決めデータをベッド位置決め制御装置38に出力する。以下、位置決めデータ生成装置37で実行される位置決めデータを生成する処理の手順を、図8を参照しつつ以下に説明する。上記の処理手順は、プログラムとして位置決めデータ生成装置37内のメモリ(例えば図示しないROM等の記録媒体)に格納されている。
【0032】
まず、医療画像アーカイブサーバ17には、X線CTによって得られた当該患者8の断層画像(DRR画像、あるいは図6に示すこの装置にて例えば前日までに予め撮影したX線画像等でもよいし、さらにそれらを公知の方法で今回イオンビームを照射する方向に合わせて編集した画像でもよい)のデータが、位置決めの基準となる基準画像データ(参照画像データ)として蓄積、格納されている。患者8の患部をビームラインm上に位置決めするに際し、まず、その基準画像データが、医療画像アーカイブサーバ17より位置決めデータ生成装置37の図示していないメモリに取り込まれる(ステップ71)。以下、「位置決めデータ生成装置37にデータ(または情報)を入力」と言った場合には、そのデータ(または情報)が位置決めデータ生成装置37の上記メモリに記憶されることを意味する。
【0033】
前述の画像処理が行われて画像処理装置35から出力された患部の現在画像データが、位置決めデータ生成装置35に入力される(ステップ72)。
【0034】
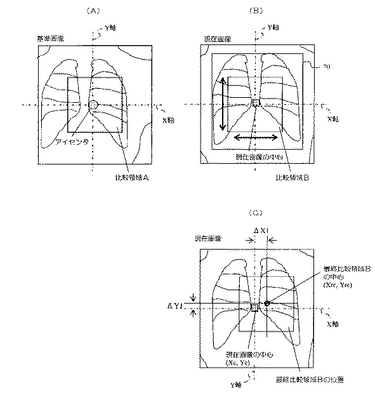
その後、位置決めデータ生成装置37に取り込まれた基準画像データがディスプレイ装置(第2表示装置)39Aに出力され(ステップ73)、位置決めデータ生成装置37に取り込まれた現在画像データがディスプレイ装置(第1表示装置)39Bに出力される(ステップ74)。これにより、基準画像がディスプレイ装置39Aに表示され、現在画像がディスプレイ装置39Bに表示される。図9(A)はディスプレイ装置39Aに表示される基準画像の表示状態例を示し、図9(B)がディスプレイ装置39Bに表示される現在画像の表示状態例を示している。ステップ74によってディスプレイ装置39Aに表示される基準画像は比較領域Aの枠を表示していない。ステップ74によってディスプレイ装置39Bに表示される現在画像は比較領域Bの枠を表示していない。なお、それら基準画像及び現在画像を別々のディスプレイ装置39A,39Bに別個に表示するのではなく、1つのディスプレイ装置に例えば横並び、あるいは重ね合わせるようにして表示してもよい。また、基準画像及び現在画像を画像処理装置35のディスプレイに表示してもよい。
【0035】
この後、操作者は、ディスプレイ装置39A,39Bに表示された基準画像及び現在画像を見つつ、ディスプレイ装置39Aに表示された基準画像内に、アイソセンタを中心とする所定の比較領域(クリッピング領域)Aを設定する。この比較領域A(具体的には比較領域Aの枠)は位置決めデータ生成装置37の入力手段を用いて設定入力(クリッピング)される。比較領域Aは、ビームラインmの位置と一致した現在画像の中心を含む現在画像とパターンマッチングで比較する領域である。比較領域Aの設定入力データは、位置決めデータ生成装置37へ取り込まれ(ステップ76)、設定された比較領域A(比較領域Aの枠)の表示情報(比較領域Aの枠の表示情報)がディスプレイ装置39Aに出力される(ステップ76)。これにより、比較領域Aの枠のデータがアイソセンタを合わせて基準画像と重ねられてディスプレイ装置39Aに表示される。図9(A)は具体的な基準画像上に比較領域Aの枠のデータを表示した例である。比較領域Aの枠の内側の領域が比較領域Aである。なお、この比較領域Aの設定を上記のように操作者の手動入力とせず、位置決めデータ生成装置37によって自動的に設定する(例えばアイソセンタを中心に予め定めた所定の大きさ範囲あるいは医療画像アーカイブサーバ17からの治療計画情報等に応じて可変の大きさ範囲に自動設定する等)ようにしてもよい。
【0036】
また、比較領域Aの設定に応じて、位置決めデータ生成装置37はディスプレイ装置に表示されている現在画像に対しても比較領域Aに対応した大きさ(例えば現在画像の中心(ビームラインm)を原点とする比較領域B(具体的には比較領域Bの枠)を設定する(ステップ77)。この比較領域Bの設定は、比較領域Aの設定のために位置決めデータ生成装置37の入力手段を用いて入力した設定入力データを用いて自動的に行われる。設定された比較領域B(比較領域Bの枠)のデータがディスプレイ装置39Bに出力される(ステップ78)。比較領域Bの枠のデータが現在画像の中心を合わせて現在画像と共に、ディスプレイ装置39Bに表示される。図9(B)は具体的な現在画像上に比較領域Bの枠を表示した例である。比較領域Bの枠の内側が比較領域Bである。なお、比較領域Bは、操作者の手動入力により設定してもよい。
【0037】
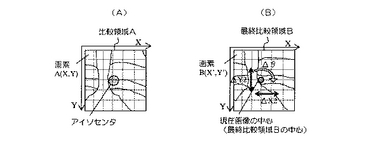
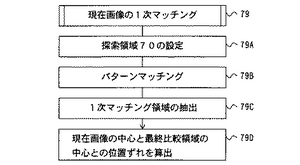
その後、位置決めデータ生成装置37が、比較領域Aと比較領域Bとについて、まず、画像間の相関を利用した類似画像探索(例えば画素情報を比較するパターンマッチング)による1次パターンマッチングを行う(ステップ79)。比較領域A及び比較領域Bは、X方向及びY方向における画素数が同じであり、それらの領域全体における画素数も同じである。ステップ79の詳細な処理を、図11を用いて説明する。まず、現在画像よりも狭くて比較領域Bよりも広い探索領域70(図9(B)参照)が設定される(ステップ79A)。比較領域Aの枠の内側に存在する基準画像(比較領域Aの基準画像という)の画素情報と比較領域Bの枠の内側に存在する現在画像(比較領域Bの現在画像)の画素情報とを比較するパターンマッチングを行う(ステップ79B)。一般的には、画像は、メッシュ上に二次元配列された多数の画素(図10(A),(B)参照)を有しており、それぞれの画素に画素情報(画素値)が格納されていると考えられている。本実施形態は、それらの画素値を利用して現在画像と基準画像とのパターンマッチングを行う。まず、スッテプ79Bにおいては、探索領域70内で比較領域Bの枠をX方向及びY方向に、順次、例えば平行移動させ、比較領域Bの枠内に含まれた現在画像の全画素の画素値(スカラ量)と比較領域A内の基準画像の全画素の画素値とを対象にしたパターンマッチングが行われる。すなわち、最初に、図9(B)において比較領域Bの枠の上端を探索領域70の上端に合せて比較領域Bの枠の左上の角を探索領域70の左上の角に一致させる。この状態で、比較領域A内の基準画像の各画素の画素値と、比較領域B内の現在画像の各画素の画素値とを画素が一対一となるように関係付けて比較する。この比較は、比較領域Aの基準画像内のある画素の画素値と、比較領域B内の現在画像内における、その画素と対応する画素の画素値の差の2乗値を、両領域内の対応する各画素全てに対して演算し、得られた全2乗値を加算する。この加算によって得られた値は比較領域A内の基準画像と上記した位置にある比較領域B内の現在画像との偏差を表しており、両画像を比較する上記の演算は両画像に含まれる比較対象となった全画素の画素値の偏差を算出する演算である。次に、比較領域Bの枠を右に画素1つ分だけ平行移動した後における比較領域Bの現在画像の各画像を対象に、比較領域A内の基準画像内の対応する各画素との間で上記の演算を行って、前述の偏差を算出する。この偏差は、比較領域Bの枠を右側(X軸方向)に画素1つ分ごとに平行移動させながら、それぞれの比較領域Bの位置で順次算出される。X軸方向への移動によって比較領域Bの枠の右端が探索領域70の右端に達した場合には、比較領域Bの枠の上端を下側(Y軸方向)に画素1つ分平行移動させる。その後、比較領域Bの枠を右側(X軸方向)に画素1つ分ごとに平行移動させながら、上記したように、それぞれの比較領域Bの位置における各偏差を順次算出する。上記した比較領域Bの枠の移動が繰り返される。比較領域Bの枠の移動は、比較領域Bの枠の下端及び右下の角が探索領域70の下端及び右下の角に一致するまで行われ、各比較領域Bの枠の位置で上記の偏差がそれぞれ算出される。
【0038】
次に、比較領域A内の基準画像と類似する画像を有する1次マッチング領域を抽出する(ステップ79C)。ステップ79Bにおいて、比較領域Bの枠の各位置でのパターンマッチングで得られた全偏差のうち、最も小さい値を示す偏差の比較領域Bを抽出する。抽出された比較領域Bを、以下、最終比較領域Bと称する。この最終比較領域B内の現在画像が、比較領域A内の基準画像と最も類似している。最終比較領域Bが1次マッチング領域である。現在画像の中心(ビームラインm)と最終比較領域B(1次マッチング領域)の中心との位置ずれを算出する(ステップ79D)。現在画像の中心の座標(Xc,Yc)及び最終比較領域Bの中心の座標(Xrc,Yrc)を用いて位置ずれの量が算出され、現在画像の中心と最終比較領域Bの中心とのX方向における位置ずれ量ΔX1、及び現在画像の中心と最終比較領域Bの中心とのY方向における位置ずれ量ΔY1が求められる。位置ずれ量ΔX1、ΔY1は、位置決めデータ生成装置37のメモリに記憶される。
【0039】
本実施形態は、1次パターンマッチングにおいて範囲を限定した比較領域A内の基準画像及び比較領域B内の現在画像を用いているため、パターンマッチングに要する時間を短縮できる。特に、1次パターンマッチングでは比較領域BをX方向及びY方向に移動させ比較領域Bを回転させないで、パターンマッチングを行っていることも、パターンマッチングに要する時間を短縮させることにつながる。
【0040】
本実施形態では、比較領域Bの枠をX方向及びY方向に並行に移動させたが、比較領域Bの枠を回転させてもよい。
【0041】
パターンマッチングの具体的な手法としては、本実施形態で述べた手法以外に以下の6つがある。(1)〜(6)のいずれかを本実施形態に適用してもよい。
【0042】
(1)残差マッチング
比較領域B(ターゲットパターン)と比較領域A(マスターパターン)とについて、全メッシュの画素情報の重ね合わせ偏差(残差)を算出する。そして、比較領域Bを上下左右に移動させながら、その残差が最小になるような比較領域Bの位置を求める。
【0043】
(2)正規化相関法
比較領域B(ターゲットパターン)及び比較領域A(マスターパターン)について、それぞれ個別に全メッシュの画素情報の正規化分布を算出する。そして、比較領域Bを上下左右に移動させながら、両者の正規化相関値が最も大きくなるような比較領域Bの位置を求めるものである。上記(1)の残差マッチングに比べれば演算時間が長くなるものの、階層化による高速化を利用すれば実際上の演算処理は可能である。
【0044】
(3)位相限定相関
比較領域B(ターゲットパターン)及び比較領域A(マスターパターン)について、それぞれ個別に全メッシュの画素情報パターンをフーリエ変換する。そして、フーリエ変換面で位相限定処理を行い、両者のマッチング点を算出するものである。
【0045】
(4)幾何マッチング
近年提唱されているエッジ点列を用いたマッチング手法であり、この場合、比較領域A(ターゲットパターン)の回転やリサイズの影響を受けることなくマッチングを行うことが可能である。
【0046】
(5)ベクトル相関
上記(4)と同様のエッジ点列を用いたマッチング手法であり、重なりや隠れの影響を受けることなくマッチングを行うことが可能である。
【0047】
(6)一般化ハフ変換
直線検出のハフ変換を一般に拡張したものであり、主に幾何学図形を対象とするものである。上記(4)(5)同様、エッジ点列を用いたマッチング手法であり、重なりや隠れ、回転、リサイズの影響を受けることなくマッチングを行うことが可能である。
【0048】
なお、上記(1)〜(6)の手法に限らず、他の手法、例えば後述のステップ81で用いる最小自乗法を用いて1次マッチングを行ってもよい。
【0049】
1次パターンマッチングによって抽出した最終比較領域Bの枠のデータがディスプレイ装置39Bに出力される(ステップ80)。最終比較領域Bの枠が現在画像の情報と合わせてディスプレイ装置39Bに表示される(図9C参照)。
【0050】
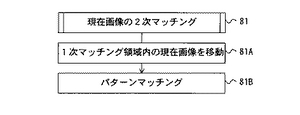
最終比較領域B内の現在画像に対する2次パターンマッチングの処理を比較領域A内の基準画像と最終比較領域B内の現在画像のみを使用し実行する(ステップ81)。すなわち,基準画像及び現在画像の全域は使用しない。2次パターンマッチングでは、上記の1次パターンマッチングで得られた1次マッチング領域(最終比較領域B)を2次マッチング候補領域として、位置決めデータ生成装置37が、比較領域A内の基準画像と、2次マッチング候補領域(最終比較領域B)内の現在画像を対象にして最終比較領域B内の現在画像を座標変換し、両画像が最も一致するX方向及びY方向の平行移動量及び回転角度量を精密に求める。具体的には、2次パターンマッチングは最小自乗法を用いてパターンマッチングを行う。
【0051】
ステップ81の詳細な処理を図12に基づいて説明する。まず、類似領域、すなわち最終比較領域B内の現在画像を移動及び回転させる(ステップ81A)。実際には,座標変換係数を用いて座標変換する。座標変換係数には,平行移動量と回転角度量が指定できる。この最終比較領域Bの移動は、最終比較領域Bの中心(最終比較領域Bの2本の対角線の交点の位置)(図9(C)参照)が現在画像の中心(ビームラインm)に一致するまで、最終比較領域B内の現在画像をX方向及びY方向への平行移動及び回転させることである(図10(B)参照)。次に、パターンマッチングを行う(ステップ81B)。このパターンマッチングは、最小自乗法を用いて、比較領域A内の基準画像と最終比較領域B内の現在画像の類似度(一致度)を評価する。すなわち、図10(B)の状態で、ステップ81Aにおいて比較領域A内の基準画像を基準に、最終比較領域B内の現在画像をX方向及びY方向に平行移動及び回転させ、移動後における最終比較領域B内の現在画像と比較領域A内の現在画像の一致度を評価する。本実施形態は、範囲を限定した比較領域A内の基準画像と比較領域B(最終比較領域B)内の現在画像をパターンマッチングしているため、それらをパターンマッチングするのに無駄のない処理を実行でき、パターンマッチングに要する処理時間を短縮できる。ステップ81Aのパターンマッチングの処理について説明する。比較領域A内の基準画像の画素の位置をA(X,Y)とし、対応する、最終比較領域B内の現在画像の画素の位置をB(X',Y')とする。各画素の位置、例えば、比較領域A内の基準画像の左上の角に位置する画素の位置はA(1,1)の座標値で表され、最終比較領域B内の現在画像の左上の角に位置する画素の位置はB(1,1)の座標値で表される。ところで、これらの画素の(X,Y)及び(X',Y')は座標情報であるため、比較領域A内の基準画像と最終比較領域B内の現在画像の各画素の対応付けは、アフィン変換のような座標変換式を用いることによって実現でき,最終比較領域B内の現在画像をこの座標変換式に基づきX方向及びY方向への平行移動及び回転させることができる.次にステップ81Bについて説明する。最小自乗法を用いて画素A(X,Y)の画素値と画素B(X',Y')の画素値との差(偏差)の2乗の値を、比較領域A内の基準画像及び最終比較領域B内の現在画像において対応する全画素ごとに算出し、得られた各2乗の値の総和を求める。ステップ81Aの手順,すなわち比較領域A内の基準画像を基準に、最終比較領域B内の現在画像をX方向及びY方向に平行移動させ、更に回転させながら,ステップ81Bにおいて上記総和を算出する。二つのステップを繰り返しながら,その総和を最小にする座標変換係数を算出する。算出されたその座標変換係数は、比較領域A内の基準画像を基準とした最終比較領域B内の現在画像の最終位置の位置ずれ量、すなわち、X方向の位置ずれ量ΔX2、Y方向の位置ずれ量ΔY1、及び回転量Δθを示している。位置ずれ量ΔX2、ΔY1及び回転量Δθは位置決めデータ生成装置37のメモリに記憶される。
【0052】
2次パターンマッチングは、1次マッチング領域(最終比較領域B)内の現在画像をX方向及びY方向への移動、更には回転させて、制限された最終比較領域B内の現在画像と制限された比較領域A内の基準画像とのパターンマッチングを行っているため、上記回転を含んでいても、パターンマッチングに要する時間は短縮される。
【0053】
なお、2次パターンマッチングは、上記最小自乗法に限らず、他の手法、例えば上記(1)〜(6)のいずれかの手法をもう一度実行して行ってもよい。
【0054】
2次パターンマッチングによって得られた、最終比較領域Bの現在画像の最終位置におけるその現在画像のデータを、ディスプレイ装置39Aに出力する(ステップ82)。その最終位置での現在画像が比較領域Aの基準画像に重ね合されてディスプレイ装置39Aに表示される(表示の図示省略)。このように、最終位置での現在画像、及び基準画像を重ね合せてディスプレイ装置に表示することによって、医者等の操作者が患部の位置決め状態を視覚で確認することができる。次に、ベッド位置決めデータが生成される(ステップ83)。ベッド位置決めデータであるベッド移動量(ベッド移動情報)は、位置決めデータ生成装置37のメモリに記憶されている位置ずれ量ΔX1、ΔY1、ΔX2、ΔY1及び回転量Δθを用いて算出される。すなわち、X方向におけるベッド移動量ΔXは(ΔX1+ΔX2)で算出され、Y方向におけるベッド移動量ΔYは(ΔY1+ΔY2)で算出される。回転方向におけるベッド移動量(ベッド回転量)ΔΘはΔθである。ベッド移動量ΔX、ΔY、ΔΘは、ベッド位置決めに用いられるベッド位置決め情報である。このベッド位置決め情報は、ベッド移動情報でもある。ステップ83では、各ベッド移動量ΔX、ΔY、ΔΘの情報がディスプレイ装置39Aに出力され、表示される。
【0055】
医者は、表示された各ベッド移動量ΔX、ΔY、ΔΘを見て、更に治療用ベッド59を移動させて患部の位置決めを再実行する必要があるかを判断する。医者は、治療用ベッドの移動による患部の位置決め操作が必要であると判断したときには、入力装置(図示せず)を用いて「ベッド移動要」の情報を、X方向、Y方向及び回転方向の区別を付けて位置決めデータ生成装置37に入力する。他方、医者は、治療用ベッドの移動による患部の位置決め操作が不要であると判断したときには、入力装置を用いて「ベッド移動不要」の情報を、位置決めデータ生成装置37に入力する。
【0056】
位置決めデータ生成装置37は、「ベッドを移動か」を判定する(ステップ84)。すなわち、入力装置からの入力情報が「ベッド移動不要」の場合には、患部がビームラインm上に位置しているため、ベッド駆動装置12による治療用ベッド59の移動、すなわち患者8の患部のビームラインmへの位置合せは行われず、その位置合せが完了する。他方、入力装置からの入力情報が「ベッド移動不要」の場合には、ベッド位置決め情報がベッド制御装置38に出力される(ステップ85)。具体的には、スッテプ83で得られた各ベッド移動量ΔX、ΔY、ΔΘがベッド制御装置38に伝えられる。ベッド移動量ΔX、ΔY、ΔΘは治療用ベッドの位置決めに用いる情報である。その後、後述する治療用ベッド59の移動による患部の位置決めがなされる。
【0057】
なお、本実施形態では、治療用ベッド59の移動の要否の判定を医者に委ねているが、位置決めデータ生成装置37でその判定を行わせることも可能である。すなわち、上記したステップ84の判定を、「ベッド移動量が移動設定値(例えば移動量0)であるか」の判定に変更して、位置決めデータ生成装置37に実行させる。具体的には、ステップ83で得られた各ベッド移動量ΔX、ΔY、ΔΘがそれぞれの移動設定値、例えば移動量0になったとき(YESの場合)、患部がビームラインm上に位置しているため、ベッド駆動装置12による治療用ベッド59の移動、すなわち患者8の患部のビームラインmへの位置合せは行われず、その位置合せが完了する。他方、変更後のステップ84の判定が「NO」の場合、すなわち、各ベッド移動量ΔX、ΔY、ΔΘがそれぞれの移動設定値、例えば移動量0になっていないときには、ステップ85の処理、すなわち、ベッド位置決め情報のベッド制御装置38への出力を行う。これにより、スッテプ83で得られた各ベッド移動量ΔX、ΔY、ΔΘがベッド制御装置38に伝えられる。なお、変更後のステップ84では、判定結果の情報、すなわち、「患者の位置決め完了」または「患者の位置決め再実行」が例えばディスプレイ装置39Aに出力され、表示される。「患者の位置決め再実行」の場合には、各ベッド移動量ΔX、ΔY、ΔΘも併せてディスプレイ装置39Aに出力され、表示される。
【0058】
ベッド制御装置38は、X線放出装置26からの前述のX線照射前の状態における治療用ベッド59のX方向及びY方向の各位置(例えばX0,Y0)、及び回転方向における回転角(例えばΘ0)のそれぞれの検出データを入力している。これらのデータは、ベッド駆動装置12に設けられた該当する検出器(図示せず)により検出される。ベッド制御装置38は、ベッド移動量ΔX、ΔY、ΔΘを入力して、移動後の治療用ベッド59の位置、すなわち(X0+ΔX)、(Y0+ΔY)及び(Θ0+ΔΘ)を算出する。そして、ベッド制御装置38は、治療用ベッド59上の患者8の患部の位置が算出した位置になるように、モータ11a,11c,11dをそれぞれ駆動して治療用ベッド59を移動させる。
【0059】
上記の治療用ベッド59の移動後、ビームラインmに沿ったX線照射が、再度、患者8に対して行われ、X線透視画像撮影装置29で得られた現在画像を用いた位置決めデータ生成装置37によるステップ72〜84の処理が「ベッド移動不要」の入力があるまで繰り返される。
【0060】
以上説明したように、本実施形態の患者ベッド位置決め装置によれば、設定された比較領域Aの基準画像と設定された比較領域Bの現在画像とのパターンマッチングを行い、ベッドの位置決めに用いる情報を生成する。これにより、操作者が特定のモニュメント、ランドマークまたは解剖学的基準点等を設定しこれに基づきベッド位置決め用データを生成する場合のように、基準画像及び現在画像の両画像内のモニュメント等の位置の指定は、基準画像と現在画像との間でずれないように精度良く行う必要がある。しかしながら、基準画像と現在画像とで対応する位置がずれないように指定することは前述のように困難である。本実施形態は、比較領域Aの基準画像と比較領域Bの現在画像とのパターンマッチングを行うため、操作者によるモニュメント等の位置の指定を行う必要がないため、操作者の技量が位置決め用データの生成精度に影響を与えることはない。したがって、操作者の技量に関係なく、ベッドの位置決め精度を向上させることができる。またこの結果、操作者の熟練度に依存しない装置を構築することが可能となる。さらに、モニュメント設定の手間が省け、位置決め作業を迅速かつスムーズに実施することもできる。
【0061】
本実施形態は、上記した両画像の対応する複数の領域(例えば、画素)に対するパターンマッチングを行って治療用ベッド59の移動量(具体的には治療用ベッド59上の患者8の患部の移動量)を求めているため、ビームラインmに対する治療用ベッド59の位置決め精度が更に向上する。さらに、本実施形態は、基準画像情報及び現在画像情報がそれぞれ有している画像情報(各画素の画素値)を用いて両画像のパターンマッチングを行っているため、パターンマッチングのために新たに情報を付加することは不要である。
【0062】
なお、上記実施形態においては、X線蛍光増倍管30を有するX線透視画像撮影装置29を用いたが、X線透視画像撮影装置29の替りに図13に示すX線透視画像撮影装置(画像情報発声装置)29Aを用いてもよい。
【0063】
X線透視画像撮影装置29Aを用いた他の実施形態の患者ベッド位置決め装置28Aを、図13を用いて説明する。患者ベッド位置決め装置28Aは、X線透視画像撮影装置29Aを用いる点で前述の患者ベッド位置決め装置28と異なっている。このため、X線透視画像撮影装置29Aは、複数の半導体放射線検出器(X線入射装置)66、複数の信号増幅器67、複数の信号処理装置68及び画像処理装置(画像情報生成装置)69を有する。複数の半導体検出器66は、ビームラインmの方向から見ると、X方向に複数列及びY方向に複数行に配列され、密接した状態出で格子状に配置される。信号増幅器67及び信号処理装置68は、半導体放射線検出器66ごとに一つずつ設置され、直列に該当する半導体放射線検出器66に接続される。各信号処理装置68から出力されたX線強度の情報は、画像処理装置69に伝えられる。
【0064】
ビームラインm上に移動されたX線放出装置26から出射されて患者8の患部を検出するための患部又はその周辺部を透過したX線ビームは、患者ベッド59を挟んで患者8と反対側に設けられた全半導体放射線検出器(フラットパネル)66に入射されて電気信号に変換される。各半導体放射線検出器66から出力された電気信号は、対応する信号増幅器67で増幅され、信号処理装置68で設定時間間隔で積算される。この積算によりX線強度情報が得られる。画像処理装置69は各信号処理装置68からのX線強度情報を用いて画像情報(現在画像の情報、キャプチャ画像)を生成する。この現在画像の情報が位置決めデータ生成装置37に取り込まれ、位置決めデータ生成装置37は前述の実施形態と同様な処理を実行する。
【0065】
本変形例によっても、上記実施形態と同様の効果を得る。
【図面の簡単な説明】
【0066】
【図1】本発明の好適な一実施形態の患者ベッド位置決め装置の適用対象である医療用粒子線照射装置の構成図である。
【図2】図1の回転ガントリーの斜視図である。
【図3】図1の回転ガントリーの正面図である。
【図4】図1の粒子線照射部の縦断面構造を表す模式図である。
【図5】図1の患者ベッドを駆動するベッド駆動装置の詳細機能を表す概念図である。
【図6】本発明の好適な一実施形態の患者ベッド位置決め装置の構成図である。
【図7】図6のX線蛍光増倍管の詳細断面構造図である。
【図8】図6の位置決めデータ生成装置が実行する処理手順を表すフローである。
【図9】図6のディスプレイ装置に表示される表示状態の例を示す図である。
【図10】図6のディスプレイ装置に表示される表示状態の例を示す図である。
【図11】図6のディスプレイ装置に表示されるん別の表示状態の例を示す図である。
【図12】図8のステップ81の詳細な処理手順を表すフローである。
【図13】本発明の好適な一実施形態の患者ベッド位置決め装置の変形例を表す構成図である。
【符号の説明】
【0067】
4…粒子線照射部、8…患者、26…X線放出装置、28,28A…患者ベッド位置決め装置、29,29A…X線透視画像撮影装置、30…X線蛍光増倍管、34…CCDカメラ、35、69…画像処理装置、37…位置決めデータ生成装置、38…ベッド制御装置、39A,39B…ディスプレイ装置、66…半導体放射線検出器、67…信号増幅器、68…信号処理装置。
【技術分野】
【0001】
本発明は、ベッド位置決め装置及びその位置決め方法に係り、特に、陽子及び炭素イオン等の荷電粒子ビーム(イオンビーム)を患部に照射して治療する粒子線治療装置に適用するのに好適なベッド位置決め装置及びその位置決め方法に関する。
【背景技術】
【0002】
癌などの患者の患部にアイソセンタ(照射目標中心)を設定して陽子等のイオンビームを照射する治療方法が知られている。この治療に用いる装置は、荷電粒子ビーム発生装置、ビーム輸送系、及び回転式の照射装置を備えている。荷電粒子ビーム発生装置で加速されたイオンビームは、第1ビーム輸送系を経て照射装置に達し、照射装置に備えられた第2ビーム輸送系を通って照射ノズルから患者の患部に照射される。
【0003】
この場合、イオンビームがアイソセンタのみに放射され正常な細胞を傷つけないように、照射ノズルに対し患者が正しい位置に配置されなければならない。粒子線照射用患者ベッド位置決め装置は、このための患者ベッドの位置決めを行う装置である(例えば、特許文献1参照)。特に、例えばイオンビームである陽子ビームの照射では、陽子が停止するに至ったときに陽子エネルギーの大部分が放出される(=ブラッグピーク)という特性を利用し、陽子ビームの起動エネルギーを選択することで陽子をアイソセンタで停止させてエネルギーの大部分をアイソセンタに位置する患部の細胞にのみ与える。このため、上記位置決めは非常に重要である。
【0004】
ここで、上記従来の患者ベッド位置決め装置においては、照射ノズルに対する患者の正確な配置を確実に行うため、予め、患者の体における特定のモニュメント(又はランドマーク、解剖学的基準点;例えば患者の骨格上の部分等)に対するアイソセンタの位置が決定される。通常は、例えば腫瘍のような傷んだ組織を含むアイソセンタの位置が例えばデジタル再構成ラジオグラフ(DRR : digitally reconstructed radiograph)上においてマーキングされ、必要に応じて他の方向から見た表示用の像が編集される。
【0005】
陽子ビームの照射に先立って患者が患者ベッドに横臥すると、陽子ビームの進路上にX線源が配置されるとともに、陽子ビームの進路に沿って患者と反対側にX線受像器が配置される。X線受像器は、患者の患部及びその周辺のX線画像を生成する。このとき、照射ノズル中において陽子ビームが通るビームラインにあるアイソセンタにある患部を位置決めさせるために、X線画像における上記特定のモニュメントからのX線ビーム中心までのオフセット距離と、上記DRR上における同じモニュメントからのアイソセンタまでのオフセット距離とを用いて、患者ベッドの照射ノズルに対しての移動方向及び移動距離を求めなければならない。この位置決め方向及び移動距離を用いて患者ベッドの位置決め制御が行われる。
【0006】
【特許文献1】特表2000−510023号公報(第27−31頁、図1,6,7A,7B)
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記従来技術では、例えば医者等の操作者が、表示装置に表示された基準画像であるDRR上で、患者の骨格上の複数のモニュメント位置をいくつか指定すると共に、表示装置に表示された、X線受像器による上記X線画像であるキャプチャー画像上でも、同じ複数のモニュメントの同じ位置を指定する。このため、操作者が両画面上での同じ複数のモニュメントの同じ位置を指定したつもりであっても、DRR上とキャプチャー画像上において対応するそれぞれの指定位置が一致せず、ずれる恐れがある。DRR及びキャプチャー画像上で一致すべき各指定位置がずれた場合には、これらを元に位置決めされる患者ベッド(特に患部)のビームラインに対する位置決め精度が悪くなる。
【0008】
本発明の目的は、ベッドの位置決め精度を更に向上できるベッド位置決め装置及びその位置決め方法を提供することにある。
【課題を解決するための手段】
【0009】
上記した目的を達成する本発明の特徴は、演算処理装置で、アイソセンタを含む基準となる第1画像情報のうち、アイソセンタを含む第1設定領域内の第1画像情報と、荷電粒子ビーム進路内に位置する患者の部位に対する第2画像情報のうち、荷電粒子ビーム進路に対応する位置を含む第2設定領域内の第2画像情報とのパターンマッチングを行い、ベッドの位置決めに用いる情報を生成することにある。第1設定領域内の第1画像情報と第2設定領域内の第2画像情報とのパターンマッチングにより位置決め用情報を生成することにより、操作者が位置を指定したモニュメントに基づき位置決め用情報を生成する場合のように、モニュメントの位置指定といった操作者技量が位置決め用情報の生成精度に影響を与えることはない。すなわち、操作者の技量に関係なく、位置決め精度を向上できる。
【発明の効果】
【0010】
本発明によれば、操作者の技量に関係なく常に十分な位置決め精度を確保することができる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の一実施形態を図面を参照しつつ説明する。
【0012】
本実施形態の患者ベッド位置決め装置の適用対象である医療用粒子線照射装置を、図1及び図2を用いて説明する。
【0013】
医療用粒子線照射装置40は、荷電粒子ビーム発生装置41及び回転ガントリー1を備える。荷電粒子ビーム発生装置(粒子線発生装置)41は、イオン源(図示せず)、前段加速器42及びシンクロトロン43を有する。イオン源で発生したイオン(例えば、陽子イオン(または炭素イオン))は前段加速器(例えば直線加速器)42で加速される。前段加速器42から出射されたイオンビーム(陽子ビーム)はシンクロトロン43に入射される。本実施形態では、イオンビームとして陽子ビームが用いられる。荷電粒子ビーム(粒子線)であるそのイオンビームは、シンクロトロン43で、高周波加速空胴44から印加される高周波電力によってエネルギーを与えられて加速される。シンクロトロン43内を周回するイオンビームのエネルギーが設定されたエネルギー(通常は100〜200MeV)までに高められた後、出射用の高周波印加装置45から高周波がイオンビームに印加される。安定限界内で周回しているイオンビームは、この高周波の印加によって安定限界外に移行し、出射用デフレクタ50を通ってシンクロトロン43から出射される。イオンビームの出射の際には、シンクロトロン43に設けられた四極電磁石46及び偏向電磁石47等の電磁石に導かれる電流が設定値に保持され、安定限界もほぼ一定に保持されている。高周波印加装置45への高周波電力の印加を停止することによって、シンクロトロン43からのイオンビームの出射が停止される。
【0014】
シンクロトロン43から出射されたイオンビームは、ビーム輸送系49を経てイオンビームを出射する粒子線照射部(粒子線照射装置)4に達する。イオンビームは、粒子線照射部4から治療用ベッド(患者ベッド)59に載っている患者8の患部(癌の患部)に照射される。粒子線照射部4は、粒子線治療に最適な線量分布を形成するイオンビームを生成する。
【0015】
回転ガントリー1は、フロントリング2を有する略筒状の回転胴(回転体)3及び図示されていないが回転胴3を回転させるモータ(回転装置、(図示せず))を備える。回転胴3の一端部に設けられたフロントリング2は、回転可能な複数のサポートロール6によって支持される。これらのサポートロール6は、図3に示されるように、回転ガントリー設置領域(建屋基礎)9に設置された支持装置10に回転自在に取り付けられる。図示されていないが、回転胴3の他端部に設けられた他のリング(外径はフロントリング2のそれに等しい)も、別の支持装置10に回転自在に取り付けられた複数のサポートロール6によって支持される。ビーム輸送系49の一部である逆U字状のビーム輸送装置5、及び粒子線照射部4は、回転胴3に設置され、回転ガントリー1の回転に伴って回転する。ビーム輸送装置5は偏向電磁石51,52等の電磁石を有する。治療ゲージ(治療室)14が回転胴3内に形成される。
【0016】
図4は、粒子線照射部4の縦断面構造を表す模式図である。この図4において、粒子線照射部4は、回転胴3に取り付けられ前述の逆U字状のビーム輸送装置5に接続されるケーシング20とさらにこのケーシング20のノズル先端側に設けられるスノート21を有している。ケーシング20及びスノート21内には、ビーム輸送装置5より導入されるイオンビーム進行方向の上流側より、例えば散乱体装置(図示せず)、リングコリメータ22、患者コリメータ23、ボーラス25を配置する。これらは、イオンビームが通るビームラインmに沿って配置される。それらのほかに、例えばリッジフィルタタイプのSOBP形成装置、及び2枚一組の楔型ブロックを備えた飛程調整装置等をビームラインm上に配置してもよい。
【0017】
リングコリメータ22はイオンビームの照射野を粗くコリメートするものであり、図示しない取付け部材を介しスノート21に取りつけられている。患者コリメータ23は、ビームラインmと直行する方向における患部形状に合わせてビームを整形するものであり、図示しない取付け部材を介しスノート21に取りつけられている。
【0018】
以上のような構成の粒子線照射部4により形成された照射野を有するイオンビームは、患者8の患部においてそのエネルギーを放出し、高線量領域を形成する。
【0019】
なお、X線源であるX線放出装置(X線管)26については、後述する。
【0020】
図2及び図3に戻り、医療用粒子線照射装置40は、粒子線治療用照射室55を回転ガントリー1の回転胴3内に設けている。粒子線治療用照射室55は、固定された環状フレーム(リング部材)15を備える。この環状フレーム15は、回転胴3のフロントリング2側に配置され、回転ガントリー設置領域9に設置された架台18に固定されている。このとき、環状フレーム15との間に粒子線照射部4の移動経路を挟むように、回転胴3の他端部側に他の環状フレーム(図示せず)が配置される。この他の環状フレームは、回転胴3の内面に固定されたサポートフレーム19に回転自在に取り付けられた複数のサポートロール20に支持される。すなわち、この他の環状フレームはサポートロール20によって回転胴3と相対的に回転可能になっている。これら環状フレーム15等は、対向するそれぞれ側面側に、下側に水平部及び上側に円弧部を有するガイド溝(図示せず)を備えている。ガイド溝は、その水平部及び円弧部によりかまぼこ状の溝になっている。
【0021】
粒子線治療用照射室55はまた、移動床17を備える。この移動床17は、多数の板24を有し、隣接する板24どうしをリンク(図示せず)で連結し屈曲自在な連設構造となっている。移動床17の一端部は環状フレーム15の上記ガイド溝と係合し、移動床17の他端部は前述の他の環状フレームのガイド溝と係合している。また、移動床17は、その円周方向両端部それぞれが粒子線照射部4に接続されている。回転ガントリー1がモータの駆動により回転した場合、粒子線照射部4もその回転方向へ移動する。粒子線照射部4に接続されている移動床17も引っ張られてその回転方向へ移動する。移動床17の移動は、上記環状フレーム15等の各ガイド溝に沿って円滑に行われる。移動床17は、各ガイド溝の水平部によって環状フレーム15等の下側に水平床部57、各ガイド溝の円弧部によって環状フレーム15等の上側に円弧壁部58を形成する。治療ゲージ14がその移動床17の内側に形成される。治療用ベッド59が、粒子線照射部4からイオンビームを照射するときには、治療ゲージ14内に挿入される。
【0022】
図5に示すように、治療台7は、ベッド駆動装置12及びベッド駆動装置12に設置された治療用ベッド59を有する。治療台7は、回転ガントリー1の外側でフロントリング1に対向して設けられ、回転ガントリー設置領域9(図3参照)より一段高くなった治療台取付領域(図示せず)の上面に設置される。ベッド駆動装置12は、図5に概念的に示すように、4つの関節軸12A,12B,12C,12Dを備え、治療用ベッド59を駆動するモータ11a,11b,11c,11dを備える。治療用ベッド59はモータ11aの駆動によりフロントリング1と平行で水平方向に伸びる関節軸12A(X軸)の方向に移動される。治療用ベッド59はモータ11bの駆動により関節軸12Aに対して垂直な関節軸12B(Z軸)の方向に移動される。治療用ベッド59はモータ11cの駆動により関節軸12A(X軸)及び関節軸12B(Z軸)のそれぞれに対して直角で回転ガントリー1の回転軸の方向に伸びる関節軸12C(Y軸)の方向に移動される。すなわち、治療用ベッド59はモータ11cの駆動により治療ゲージ14内に出し入れされる。治療用ベッド59はモータ11dの駆動により関節軸12C(Y軸)に対して垂直な関節軸12D(Ψ軸)まわりに回転される。
【0023】
以上のような基本構成の医療用粒子線照射装置40に、本実施形態の患者ベッド位置決め装置が設けられている。以下、その構成及び機能を詳細に説明する。
【0024】
本実施形態の患者ベッド位置決め装置28は、図6に示すように、X線放出装置(X線源)26、X線透視画像撮影装置(画像情報発生装置)29、X線源制御装置36、図示しない入力手段(キーボード、マウス等)を有する位置決めデータ生成装置(位置決め情報生成装置)37、医療画像アーカイブサーバ17、ベッド制御装置38、及びディスプレイ装置39A,39Bを備える。位置決めデータ生成装置37はワークステーション(演算処理装置)である。
【0025】
X線透視画像撮影装置29は、X線蛍光増倍管(X線イメージインテンシファイア)30、光学系33及びCCDカメラ(画像情報生成装置)34を有する。X線蛍光増倍管30は、図7に示すように、真空の容器31内で、蛍光膜基板32を入力窓64側に、出力蛍光膜53を出力窓63側に配置している。蛍光膜基板32は、裏面(入力窓64と反対側の面)に入力蛍光膜(X線入射装置、X線変換装置)48を有する。出力蛍光膜53の直径は入力蛍光膜48のそれよりも小さい。光電陰極50が入力蛍光膜48に接触して配置される。集束電極54が光電子通路65を取り囲むように容器31内に設置される。出力蛍光膜53を取り囲む陽極60が容器31内に設置される。光電陰極50と集束電極54との間には、集束電源56より電圧が印加される。また、光電陰極5と陽極60との間には陽極電源61より電圧が印加される。
【0026】
X線透視画像撮影装置29は、回転ガントリー1の回転胴3に取り付けられ、回転ガントリー1の回転と共に回転する。X線透視画像撮影装置29は、ビームラインm上に位置しており、治療用ベッド59を基準として粒子線照射部4の反対側に配置される。
【0027】
X線放出装置26は、図4に示したように、スノート21に21に取り付けられた支持部材16上にビームラインmと直交する方向に移動可能に設けられている。支持部材16は、イオンビーム及びX線が通る開口部を有する。X線放出装置26は、通常(例えば、イオンビームの照射中等の治療用ベッド59の位置合せ以外のとき)、ビームラインmから離れた位置P1に退避している。
【0028】
イオンビーム照射による治療を開始するために患者8が治療用ベッド59に横臥すると、医者等の操作者は、患者8の体表面に描かれた十字マーク(患部の真上にレーザーで表示)がビームラインm上に位置させるように、ベッド制御装置38の入力装置(図示せず)を用いてベッド制御装置38に治療用ベッド59の移動指令を入力する。ベッド制御装置38は、その移動指令に基づいてベッド駆動装置12を制御して治療用ベッド59を移動させ、体表面の十字マークをビームラインmに一致させる。この位置合わせにより、患部とビームラインmとのずれ量はミリメートルオーダの範囲内となる。
【0029】
操作者は、X線放出装置26の前進駆動の開始指令を、入力手段(図示せず)を介して例えばパソコンであるX線源制御装置36に入力する。開始指令を入力したX線源制御装置36は、X線源移動信号をX線放出装置26の図示されていない駆動装置(例えば、モータ)に出力する。これにより、X線放出装置26がビームラインm上の位置P2まで前進移動される。その後、操作者がX線照射開始指令をX線源制御装置36に入力したとき、X線源制御装置36から出力されたX線照射開始信号がX線放出装置26へ入力され、これに応じてX線放出装置26がX線ビームをビームラインmに沿い患者8に向かって照射する。
【0030】
患者8を透過したX線は、入力窓64から容器31内に入力され、蛍光膜基板32を通って入力蛍光膜53に達して可視光像に変換される。可視光像の光は光電陰極50で光電子に変換される。この光電子は集束電極54によって集束され、光電子通路65及び陽極60内を通って出力蛍光膜53に到達して明るい可視光像に変換される。この可視光像は光学系33内のレンズ62を介してCCDカメラ34によって撮影される。CCDカメラ34によって撮影された画像は、第1演算装置としてのパソコン(画像処理装置)35に入力される。画像処理装置35は、その画像に対して所定の演算処理が行われ、画像処理(例えば色彩的な修正、ぼけの修正等)が施される。このような画像処理が施された、患部を含む画像データ(現在画像データ(キャプチャ画像データ))が、画像処理装置35から位置決めデータ生成装置37に入力される。
【0031】
位置決めデータ生成装置37は、X線透視画像装置29から出力された現在画像データ、及び医療画像アーカイブサーバ17に記憶されている画像データを用いて、治療用ベッド59の位置決めデータを生成し、この位置決めデータをベッド位置決め制御装置38に出力する。以下、位置決めデータ生成装置37で実行される位置決めデータを生成する処理の手順を、図8を参照しつつ以下に説明する。上記の処理手順は、プログラムとして位置決めデータ生成装置37内のメモリ(例えば図示しないROM等の記録媒体)に格納されている。
【0032】
まず、医療画像アーカイブサーバ17には、X線CTによって得られた当該患者8の断層画像(DRR画像、あるいは図6に示すこの装置にて例えば前日までに予め撮影したX線画像等でもよいし、さらにそれらを公知の方法で今回イオンビームを照射する方向に合わせて編集した画像でもよい)のデータが、位置決めの基準となる基準画像データ(参照画像データ)として蓄積、格納されている。患者8の患部をビームラインm上に位置決めするに際し、まず、その基準画像データが、医療画像アーカイブサーバ17より位置決めデータ生成装置37の図示していないメモリに取り込まれる(ステップ71)。以下、「位置決めデータ生成装置37にデータ(または情報)を入力」と言った場合には、そのデータ(または情報)が位置決めデータ生成装置37の上記メモリに記憶されることを意味する。
【0033】
前述の画像処理が行われて画像処理装置35から出力された患部の現在画像データが、位置決めデータ生成装置35に入力される(ステップ72)。
【0034】
その後、位置決めデータ生成装置37に取り込まれた基準画像データがディスプレイ装置(第2表示装置)39Aに出力され(ステップ73)、位置決めデータ生成装置37に取り込まれた現在画像データがディスプレイ装置(第1表示装置)39Bに出力される(ステップ74)。これにより、基準画像がディスプレイ装置39Aに表示され、現在画像がディスプレイ装置39Bに表示される。図9(A)はディスプレイ装置39Aに表示される基準画像の表示状態例を示し、図9(B)がディスプレイ装置39Bに表示される現在画像の表示状態例を示している。ステップ74によってディスプレイ装置39Aに表示される基準画像は比較領域Aの枠を表示していない。ステップ74によってディスプレイ装置39Bに表示される現在画像は比較領域Bの枠を表示していない。なお、それら基準画像及び現在画像を別々のディスプレイ装置39A,39Bに別個に表示するのではなく、1つのディスプレイ装置に例えば横並び、あるいは重ね合わせるようにして表示してもよい。また、基準画像及び現在画像を画像処理装置35のディスプレイに表示してもよい。
【0035】
この後、操作者は、ディスプレイ装置39A,39Bに表示された基準画像及び現在画像を見つつ、ディスプレイ装置39Aに表示された基準画像内に、アイソセンタを中心とする所定の比較領域(クリッピング領域)Aを設定する。この比較領域A(具体的には比較領域Aの枠)は位置決めデータ生成装置37の入力手段を用いて設定入力(クリッピング)される。比較領域Aは、ビームラインmの位置と一致した現在画像の中心を含む現在画像とパターンマッチングで比較する領域である。比較領域Aの設定入力データは、位置決めデータ生成装置37へ取り込まれ(ステップ76)、設定された比較領域A(比較領域Aの枠)の表示情報(比較領域Aの枠の表示情報)がディスプレイ装置39Aに出力される(ステップ76)。これにより、比較領域Aの枠のデータがアイソセンタを合わせて基準画像と重ねられてディスプレイ装置39Aに表示される。図9(A)は具体的な基準画像上に比較領域Aの枠のデータを表示した例である。比較領域Aの枠の内側の領域が比較領域Aである。なお、この比較領域Aの設定を上記のように操作者の手動入力とせず、位置決めデータ生成装置37によって自動的に設定する(例えばアイソセンタを中心に予め定めた所定の大きさ範囲あるいは医療画像アーカイブサーバ17からの治療計画情報等に応じて可変の大きさ範囲に自動設定する等)ようにしてもよい。
【0036】
また、比較領域Aの設定に応じて、位置決めデータ生成装置37はディスプレイ装置に表示されている現在画像に対しても比較領域Aに対応した大きさ(例えば現在画像の中心(ビームラインm)を原点とする比較領域B(具体的には比較領域Bの枠)を設定する(ステップ77)。この比較領域Bの設定は、比較領域Aの設定のために位置決めデータ生成装置37の入力手段を用いて入力した設定入力データを用いて自動的に行われる。設定された比較領域B(比較領域Bの枠)のデータがディスプレイ装置39Bに出力される(ステップ78)。比較領域Bの枠のデータが現在画像の中心を合わせて現在画像と共に、ディスプレイ装置39Bに表示される。図9(B)は具体的な現在画像上に比較領域Bの枠を表示した例である。比較領域Bの枠の内側が比較領域Bである。なお、比較領域Bは、操作者の手動入力により設定してもよい。
【0037】
その後、位置決めデータ生成装置37が、比較領域Aと比較領域Bとについて、まず、画像間の相関を利用した類似画像探索(例えば画素情報を比較するパターンマッチング)による1次パターンマッチングを行う(ステップ79)。比較領域A及び比較領域Bは、X方向及びY方向における画素数が同じであり、それらの領域全体における画素数も同じである。ステップ79の詳細な処理を、図11を用いて説明する。まず、現在画像よりも狭くて比較領域Bよりも広い探索領域70(図9(B)参照)が設定される(ステップ79A)。比較領域Aの枠の内側に存在する基準画像(比較領域Aの基準画像という)の画素情報と比較領域Bの枠の内側に存在する現在画像(比較領域Bの現在画像)の画素情報とを比較するパターンマッチングを行う(ステップ79B)。一般的には、画像は、メッシュ上に二次元配列された多数の画素(図10(A),(B)参照)を有しており、それぞれの画素に画素情報(画素値)が格納されていると考えられている。本実施形態は、それらの画素値を利用して現在画像と基準画像とのパターンマッチングを行う。まず、スッテプ79Bにおいては、探索領域70内で比較領域Bの枠をX方向及びY方向に、順次、例えば平行移動させ、比較領域Bの枠内に含まれた現在画像の全画素の画素値(スカラ量)と比較領域A内の基準画像の全画素の画素値とを対象にしたパターンマッチングが行われる。すなわち、最初に、図9(B)において比較領域Bの枠の上端を探索領域70の上端に合せて比較領域Bの枠の左上の角を探索領域70の左上の角に一致させる。この状態で、比較領域A内の基準画像の各画素の画素値と、比較領域B内の現在画像の各画素の画素値とを画素が一対一となるように関係付けて比較する。この比較は、比較領域Aの基準画像内のある画素の画素値と、比較領域B内の現在画像内における、その画素と対応する画素の画素値の差の2乗値を、両領域内の対応する各画素全てに対して演算し、得られた全2乗値を加算する。この加算によって得られた値は比較領域A内の基準画像と上記した位置にある比較領域B内の現在画像との偏差を表しており、両画像を比較する上記の演算は両画像に含まれる比較対象となった全画素の画素値の偏差を算出する演算である。次に、比較領域Bの枠を右に画素1つ分だけ平行移動した後における比較領域Bの現在画像の各画像を対象に、比較領域A内の基準画像内の対応する各画素との間で上記の演算を行って、前述の偏差を算出する。この偏差は、比較領域Bの枠を右側(X軸方向)に画素1つ分ごとに平行移動させながら、それぞれの比較領域Bの位置で順次算出される。X軸方向への移動によって比較領域Bの枠の右端が探索領域70の右端に達した場合には、比較領域Bの枠の上端を下側(Y軸方向)に画素1つ分平行移動させる。その後、比較領域Bの枠を右側(X軸方向)に画素1つ分ごとに平行移動させながら、上記したように、それぞれの比較領域Bの位置における各偏差を順次算出する。上記した比較領域Bの枠の移動が繰り返される。比較領域Bの枠の移動は、比較領域Bの枠の下端及び右下の角が探索領域70の下端及び右下の角に一致するまで行われ、各比較領域Bの枠の位置で上記の偏差がそれぞれ算出される。
【0038】
次に、比較領域A内の基準画像と類似する画像を有する1次マッチング領域を抽出する(ステップ79C)。ステップ79Bにおいて、比較領域Bの枠の各位置でのパターンマッチングで得られた全偏差のうち、最も小さい値を示す偏差の比較領域Bを抽出する。抽出された比較領域Bを、以下、最終比較領域Bと称する。この最終比較領域B内の現在画像が、比較領域A内の基準画像と最も類似している。最終比較領域Bが1次マッチング領域である。現在画像の中心(ビームラインm)と最終比較領域B(1次マッチング領域)の中心との位置ずれを算出する(ステップ79D)。現在画像の中心の座標(Xc,Yc)及び最終比較領域Bの中心の座標(Xrc,Yrc)を用いて位置ずれの量が算出され、現在画像の中心と最終比較領域Bの中心とのX方向における位置ずれ量ΔX1、及び現在画像の中心と最終比較領域Bの中心とのY方向における位置ずれ量ΔY1が求められる。位置ずれ量ΔX1、ΔY1は、位置決めデータ生成装置37のメモリに記憶される。
【0039】
本実施形態は、1次パターンマッチングにおいて範囲を限定した比較領域A内の基準画像及び比較領域B内の現在画像を用いているため、パターンマッチングに要する時間を短縮できる。特に、1次パターンマッチングでは比較領域BをX方向及びY方向に移動させ比較領域Bを回転させないで、パターンマッチングを行っていることも、パターンマッチングに要する時間を短縮させることにつながる。
【0040】
本実施形態では、比較領域Bの枠をX方向及びY方向に並行に移動させたが、比較領域Bの枠を回転させてもよい。
【0041】
パターンマッチングの具体的な手法としては、本実施形態で述べた手法以外に以下の6つがある。(1)〜(6)のいずれかを本実施形態に適用してもよい。
【0042】
(1)残差マッチング
比較領域B(ターゲットパターン)と比較領域A(マスターパターン)とについて、全メッシュの画素情報の重ね合わせ偏差(残差)を算出する。そして、比較領域Bを上下左右に移動させながら、その残差が最小になるような比較領域Bの位置を求める。
【0043】
(2)正規化相関法
比較領域B(ターゲットパターン)及び比較領域A(マスターパターン)について、それぞれ個別に全メッシュの画素情報の正規化分布を算出する。そして、比較領域Bを上下左右に移動させながら、両者の正規化相関値が最も大きくなるような比較領域Bの位置を求めるものである。上記(1)の残差マッチングに比べれば演算時間が長くなるものの、階層化による高速化を利用すれば実際上の演算処理は可能である。
【0044】
(3)位相限定相関
比較領域B(ターゲットパターン)及び比較領域A(マスターパターン)について、それぞれ個別に全メッシュの画素情報パターンをフーリエ変換する。そして、フーリエ変換面で位相限定処理を行い、両者のマッチング点を算出するものである。
【0045】
(4)幾何マッチング
近年提唱されているエッジ点列を用いたマッチング手法であり、この場合、比較領域A(ターゲットパターン)の回転やリサイズの影響を受けることなくマッチングを行うことが可能である。
【0046】
(5)ベクトル相関
上記(4)と同様のエッジ点列を用いたマッチング手法であり、重なりや隠れの影響を受けることなくマッチングを行うことが可能である。
【0047】
(6)一般化ハフ変換
直線検出のハフ変換を一般に拡張したものであり、主に幾何学図形を対象とするものである。上記(4)(5)同様、エッジ点列を用いたマッチング手法であり、重なりや隠れ、回転、リサイズの影響を受けることなくマッチングを行うことが可能である。
【0048】
なお、上記(1)〜(6)の手法に限らず、他の手法、例えば後述のステップ81で用いる最小自乗法を用いて1次マッチングを行ってもよい。
【0049】
1次パターンマッチングによって抽出した最終比較領域Bの枠のデータがディスプレイ装置39Bに出力される(ステップ80)。最終比較領域Bの枠が現在画像の情報と合わせてディスプレイ装置39Bに表示される(図9C参照)。
【0050】
最終比較領域B内の現在画像に対する2次パターンマッチングの処理を比較領域A内の基準画像と最終比較領域B内の現在画像のみを使用し実行する(ステップ81)。すなわち,基準画像及び現在画像の全域は使用しない。2次パターンマッチングでは、上記の1次パターンマッチングで得られた1次マッチング領域(最終比較領域B)を2次マッチング候補領域として、位置決めデータ生成装置37が、比較領域A内の基準画像と、2次マッチング候補領域(最終比較領域B)内の現在画像を対象にして最終比較領域B内の現在画像を座標変換し、両画像が最も一致するX方向及びY方向の平行移動量及び回転角度量を精密に求める。具体的には、2次パターンマッチングは最小自乗法を用いてパターンマッチングを行う。
【0051】
ステップ81の詳細な処理を図12に基づいて説明する。まず、類似領域、すなわち最終比較領域B内の現在画像を移動及び回転させる(ステップ81A)。実際には,座標変換係数を用いて座標変換する。座標変換係数には,平行移動量と回転角度量が指定できる。この最終比較領域Bの移動は、最終比較領域Bの中心(最終比較領域Bの2本の対角線の交点の位置)(図9(C)参照)が現在画像の中心(ビームラインm)に一致するまで、最終比較領域B内の現在画像をX方向及びY方向への平行移動及び回転させることである(図10(B)参照)。次に、パターンマッチングを行う(ステップ81B)。このパターンマッチングは、最小自乗法を用いて、比較領域A内の基準画像と最終比較領域B内の現在画像の類似度(一致度)を評価する。すなわち、図10(B)の状態で、ステップ81Aにおいて比較領域A内の基準画像を基準に、最終比較領域B内の現在画像をX方向及びY方向に平行移動及び回転させ、移動後における最終比較領域B内の現在画像と比較領域A内の現在画像の一致度を評価する。本実施形態は、範囲を限定した比較領域A内の基準画像と比較領域B(最終比較領域B)内の現在画像をパターンマッチングしているため、それらをパターンマッチングするのに無駄のない処理を実行でき、パターンマッチングに要する処理時間を短縮できる。ステップ81Aのパターンマッチングの処理について説明する。比較領域A内の基準画像の画素の位置をA(X,Y)とし、対応する、最終比較領域B内の現在画像の画素の位置をB(X',Y')とする。各画素の位置、例えば、比較領域A内の基準画像の左上の角に位置する画素の位置はA(1,1)の座標値で表され、最終比較領域B内の現在画像の左上の角に位置する画素の位置はB(1,1)の座標値で表される。ところで、これらの画素の(X,Y)及び(X',Y')は座標情報であるため、比較領域A内の基準画像と最終比較領域B内の現在画像の各画素の対応付けは、アフィン変換のような座標変換式を用いることによって実現でき,最終比較領域B内の現在画像をこの座標変換式に基づきX方向及びY方向への平行移動及び回転させることができる.次にステップ81Bについて説明する。最小自乗法を用いて画素A(X,Y)の画素値と画素B(X',Y')の画素値との差(偏差)の2乗の値を、比較領域A内の基準画像及び最終比較領域B内の現在画像において対応する全画素ごとに算出し、得られた各2乗の値の総和を求める。ステップ81Aの手順,すなわち比較領域A内の基準画像を基準に、最終比較領域B内の現在画像をX方向及びY方向に平行移動させ、更に回転させながら,ステップ81Bにおいて上記総和を算出する。二つのステップを繰り返しながら,その総和を最小にする座標変換係数を算出する。算出されたその座標変換係数は、比較領域A内の基準画像を基準とした最終比較領域B内の現在画像の最終位置の位置ずれ量、すなわち、X方向の位置ずれ量ΔX2、Y方向の位置ずれ量ΔY1、及び回転量Δθを示している。位置ずれ量ΔX2、ΔY1及び回転量Δθは位置決めデータ生成装置37のメモリに記憶される。
【0052】
2次パターンマッチングは、1次マッチング領域(最終比較領域B)内の現在画像をX方向及びY方向への移動、更には回転させて、制限された最終比較領域B内の現在画像と制限された比較領域A内の基準画像とのパターンマッチングを行っているため、上記回転を含んでいても、パターンマッチングに要する時間は短縮される。
【0053】
なお、2次パターンマッチングは、上記最小自乗法に限らず、他の手法、例えば上記(1)〜(6)のいずれかの手法をもう一度実行して行ってもよい。
【0054】
2次パターンマッチングによって得られた、最終比較領域Bの現在画像の最終位置におけるその現在画像のデータを、ディスプレイ装置39Aに出力する(ステップ82)。その最終位置での現在画像が比較領域Aの基準画像に重ね合されてディスプレイ装置39Aに表示される(表示の図示省略)。このように、最終位置での現在画像、及び基準画像を重ね合せてディスプレイ装置に表示することによって、医者等の操作者が患部の位置決め状態を視覚で確認することができる。次に、ベッド位置決めデータが生成される(ステップ83)。ベッド位置決めデータであるベッド移動量(ベッド移動情報)は、位置決めデータ生成装置37のメモリに記憶されている位置ずれ量ΔX1、ΔY1、ΔX2、ΔY1及び回転量Δθを用いて算出される。すなわち、X方向におけるベッド移動量ΔXは(ΔX1+ΔX2)で算出され、Y方向におけるベッド移動量ΔYは(ΔY1+ΔY2)で算出される。回転方向におけるベッド移動量(ベッド回転量)ΔΘはΔθである。ベッド移動量ΔX、ΔY、ΔΘは、ベッド位置決めに用いられるベッド位置決め情報である。このベッド位置決め情報は、ベッド移動情報でもある。ステップ83では、各ベッド移動量ΔX、ΔY、ΔΘの情報がディスプレイ装置39Aに出力され、表示される。
【0055】
医者は、表示された各ベッド移動量ΔX、ΔY、ΔΘを見て、更に治療用ベッド59を移動させて患部の位置決めを再実行する必要があるかを判断する。医者は、治療用ベッドの移動による患部の位置決め操作が必要であると判断したときには、入力装置(図示せず)を用いて「ベッド移動要」の情報を、X方向、Y方向及び回転方向の区別を付けて位置決めデータ生成装置37に入力する。他方、医者は、治療用ベッドの移動による患部の位置決め操作が不要であると判断したときには、入力装置を用いて「ベッド移動不要」の情報を、位置決めデータ生成装置37に入力する。
【0056】
位置決めデータ生成装置37は、「ベッドを移動か」を判定する(ステップ84)。すなわち、入力装置からの入力情報が「ベッド移動不要」の場合には、患部がビームラインm上に位置しているため、ベッド駆動装置12による治療用ベッド59の移動、すなわち患者8の患部のビームラインmへの位置合せは行われず、その位置合せが完了する。他方、入力装置からの入力情報が「ベッド移動不要」の場合には、ベッド位置決め情報がベッド制御装置38に出力される(ステップ85)。具体的には、スッテプ83で得られた各ベッド移動量ΔX、ΔY、ΔΘがベッド制御装置38に伝えられる。ベッド移動量ΔX、ΔY、ΔΘは治療用ベッドの位置決めに用いる情報である。その後、後述する治療用ベッド59の移動による患部の位置決めがなされる。
【0057】
なお、本実施形態では、治療用ベッド59の移動の要否の判定を医者に委ねているが、位置決めデータ生成装置37でその判定を行わせることも可能である。すなわち、上記したステップ84の判定を、「ベッド移動量が移動設定値(例えば移動量0)であるか」の判定に変更して、位置決めデータ生成装置37に実行させる。具体的には、ステップ83で得られた各ベッド移動量ΔX、ΔY、ΔΘがそれぞれの移動設定値、例えば移動量0になったとき(YESの場合)、患部がビームラインm上に位置しているため、ベッド駆動装置12による治療用ベッド59の移動、すなわち患者8の患部のビームラインmへの位置合せは行われず、その位置合せが完了する。他方、変更後のステップ84の判定が「NO」の場合、すなわち、各ベッド移動量ΔX、ΔY、ΔΘがそれぞれの移動設定値、例えば移動量0になっていないときには、ステップ85の処理、すなわち、ベッド位置決め情報のベッド制御装置38への出力を行う。これにより、スッテプ83で得られた各ベッド移動量ΔX、ΔY、ΔΘがベッド制御装置38に伝えられる。なお、変更後のステップ84では、判定結果の情報、すなわち、「患者の位置決め完了」または「患者の位置決め再実行」が例えばディスプレイ装置39Aに出力され、表示される。「患者の位置決め再実行」の場合には、各ベッド移動量ΔX、ΔY、ΔΘも併せてディスプレイ装置39Aに出力され、表示される。
【0058】
ベッド制御装置38は、X線放出装置26からの前述のX線照射前の状態における治療用ベッド59のX方向及びY方向の各位置(例えばX0,Y0)、及び回転方向における回転角(例えばΘ0)のそれぞれの検出データを入力している。これらのデータは、ベッド駆動装置12に設けられた該当する検出器(図示せず)により検出される。ベッド制御装置38は、ベッド移動量ΔX、ΔY、ΔΘを入力して、移動後の治療用ベッド59の位置、すなわち(X0+ΔX)、(Y0+ΔY)及び(Θ0+ΔΘ)を算出する。そして、ベッド制御装置38は、治療用ベッド59上の患者8の患部の位置が算出した位置になるように、モータ11a,11c,11dをそれぞれ駆動して治療用ベッド59を移動させる。
【0059】
上記の治療用ベッド59の移動後、ビームラインmに沿ったX線照射が、再度、患者8に対して行われ、X線透視画像撮影装置29で得られた現在画像を用いた位置決めデータ生成装置37によるステップ72〜84の処理が「ベッド移動不要」の入力があるまで繰り返される。
【0060】
以上説明したように、本実施形態の患者ベッド位置決め装置によれば、設定された比較領域Aの基準画像と設定された比較領域Bの現在画像とのパターンマッチングを行い、ベッドの位置決めに用いる情報を生成する。これにより、操作者が特定のモニュメント、ランドマークまたは解剖学的基準点等を設定しこれに基づきベッド位置決め用データを生成する場合のように、基準画像及び現在画像の両画像内のモニュメント等の位置の指定は、基準画像と現在画像との間でずれないように精度良く行う必要がある。しかしながら、基準画像と現在画像とで対応する位置がずれないように指定することは前述のように困難である。本実施形態は、比較領域Aの基準画像と比較領域Bの現在画像とのパターンマッチングを行うため、操作者によるモニュメント等の位置の指定を行う必要がないため、操作者の技量が位置決め用データの生成精度に影響を与えることはない。したがって、操作者の技量に関係なく、ベッドの位置決め精度を向上させることができる。またこの結果、操作者の熟練度に依存しない装置を構築することが可能となる。さらに、モニュメント設定の手間が省け、位置決め作業を迅速かつスムーズに実施することもできる。
【0061】
本実施形態は、上記した両画像の対応する複数の領域(例えば、画素)に対するパターンマッチングを行って治療用ベッド59の移動量(具体的には治療用ベッド59上の患者8の患部の移動量)を求めているため、ビームラインmに対する治療用ベッド59の位置決め精度が更に向上する。さらに、本実施形態は、基準画像情報及び現在画像情報がそれぞれ有している画像情報(各画素の画素値)を用いて両画像のパターンマッチングを行っているため、パターンマッチングのために新たに情報を付加することは不要である。
【0062】
なお、上記実施形態においては、X線蛍光増倍管30を有するX線透視画像撮影装置29を用いたが、X線透視画像撮影装置29の替りに図13に示すX線透視画像撮影装置(画像情報発声装置)29Aを用いてもよい。
【0063】
X線透視画像撮影装置29Aを用いた他の実施形態の患者ベッド位置決め装置28Aを、図13を用いて説明する。患者ベッド位置決め装置28Aは、X線透視画像撮影装置29Aを用いる点で前述の患者ベッド位置決め装置28と異なっている。このため、X線透視画像撮影装置29Aは、複数の半導体放射線検出器(X線入射装置)66、複数の信号増幅器67、複数の信号処理装置68及び画像処理装置(画像情報生成装置)69を有する。複数の半導体検出器66は、ビームラインmの方向から見ると、X方向に複数列及びY方向に複数行に配列され、密接した状態出で格子状に配置される。信号増幅器67及び信号処理装置68は、半導体放射線検出器66ごとに一つずつ設置され、直列に該当する半導体放射線検出器66に接続される。各信号処理装置68から出力されたX線強度の情報は、画像処理装置69に伝えられる。
【0064】
ビームラインm上に移動されたX線放出装置26から出射されて患者8の患部を検出するための患部又はその周辺部を透過したX線ビームは、患者ベッド59を挟んで患者8と反対側に設けられた全半導体放射線検出器(フラットパネル)66に入射されて電気信号に変換される。各半導体放射線検出器66から出力された電気信号は、対応する信号増幅器67で増幅され、信号処理装置68で設定時間間隔で積算される。この積算によりX線強度情報が得られる。画像処理装置69は各信号処理装置68からのX線強度情報を用いて画像情報(現在画像の情報、キャプチャ画像)を生成する。この現在画像の情報が位置決めデータ生成装置37に取り込まれ、位置決めデータ生成装置37は前述の実施形態と同様な処理を実行する。
【0065】
本変形例によっても、上記実施形態と同様の効果を得る。
【図面の簡単な説明】
【0066】
【図1】本発明の好適な一実施形態の患者ベッド位置決め装置の適用対象である医療用粒子線照射装置の構成図である。
【図2】図1の回転ガントリーの斜視図である。
【図3】図1の回転ガントリーの正面図である。
【図4】図1の粒子線照射部の縦断面構造を表す模式図である。
【図5】図1の患者ベッドを駆動するベッド駆動装置の詳細機能を表す概念図である。
【図6】本発明の好適な一実施形態の患者ベッド位置決め装置の構成図である。
【図7】図6のX線蛍光増倍管の詳細断面構造図である。
【図8】図6の位置決めデータ生成装置が実行する処理手順を表すフローである。
【図9】図6のディスプレイ装置に表示される表示状態の例を示す図である。
【図10】図6のディスプレイ装置に表示される表示状態の例を示す図である。
【図11】図6のディスプレイ装置に表示されるん別の表示状態の例を示す図である。
【図12】図8のステップ81の詳細な処理手順を表すフローである。
【図13】本発明の好適な一実施形態の患者ベッド位置決め装置の変形例を表す構成図である。
【符号の説明】
【0067】
4…粒子線照射部、8…患者、26…X線放出装置、28,28A…患者ベッド位置決め装置、29,29A…X線透視画像撮影装置、30…X線蛍光増倍管、34…CCDカメラ、35、69…画像処理装置、37…位置決めデータ生成装置、38…ベッド制御装置、39A,39B…ディスプレイ装置、66…半導体放射線検出器、67…信号増幅器、68…信号処理装置。
【特許請求の範囲】
【請求項1】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
前記粒子線照射装置に装着され、荷電粒子ビーム進路内に位置する第1のポジションと、前記荷電粒子ビーム進路から離れて前記荷電粒子ビームの進行が妨げられない第2のポジションとの間を移動し、前記第1のポジションでX線を放射するX線放出装置と、
このX線放出装置から出射されたX線を入射してそのX線に応じた出力信号を出力するX線入射装置と、
前記X線入射装置から出力された前記出力信号を用いて、前記荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報生成装置と、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報のうち、前記アイソセンタを含む第1設定領域内の前記第1画像情報と、前記第2画像情報のうち、前記荷電粒子ビーム進路に対応する位置を含む第2設定領域内の前記第2画像情報とのパターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項2】
請求項1記載のベッド位置決め装置において、前記位置決め用情報に基づき、前記ベッドの移動制御を行うベッド制御装置をさらに備えたことを特徴とするベッド位置決め装置。
【請求項3】
請求項1記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項4】
請求項3記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項5】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
前記粒子線照射装置に装着され、荷電粒子ビーム進路内に位置する第1のポジションと、前記荷電粒子ビーム進路から離れて前記荷電粒子ビームの進行が妨げられない第2のポジションとの間を移動し、前記第1のポジションでX線を放射するX線放出装置と、
このX線放出装置から出射されたX線に応じた信号を用いて、前記荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報発生装置と、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報、及び前記第2画像情報を表示する表示装置と、
前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域を設定し、前記第1設定領域内の前記第1画像情報と、前記第2設定領域内の前記第2画像情報とのパターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成し、前記第1設定領域及び前記第2設定領域のそれぞれの枠の表示情報を前記表示装置に出力する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項6】
請求項5記載のベッド位置決め装置において、前記表示装置は、前記第1画像情報を表示する第1表示装置、及び前記第1表示装置とは別の、前記第2画像情報を表示する第2表示装置を含むことを特徴とするベッド位置決め装置。
【請求項7】
請求項5記載のベッド位置決め装置において、前記画像情報発生装置は、前記入射したX線を光に変換するX線変換装置と、前記光を撮影し前記第2画像情報を生成するカメラとを備えることを特徴とするベッド位置決め装置。
【請求項8】
請求項5記載のベッド位置決め装置において、前記画像情報発生装置は、前記入射したX線を電気信号に変換する複数の半導体放射線検出器と、前記半導体放射線検出器毎に設けられて前記電気信号を処理する信号処理装置と、前記各信号処理装置の出力を入力して前記第2画像情報を生成する画像情報生成装置とを備えることを特徴とするベッド位置決め装置。
【請求項9】
請求項5記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項10】
請求項9記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項11】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
前記粒子線照射装置に装着され、荷電粒子ビーム進路内に位置する第1のポジションと、前記荷電粒子ビーム進路から離れて前記荷電粒子ビームの進行が妨げられない第2のポジションとの間を移動し、前記第1のポジションでX線を放射するX線放出装置と、
このX線放出装置から出射されたX線に応じた信号を用いて、前記荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報発生装置と、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含み前記第1設定領域と略同じ大きさの第2設定領域を設定し、前記第1設定領域内の前記第1画像情報と、前記第2設定領域内の前記第2画像情報との1次パターンマッチングを行って、前記第2画像情報に対する1次マッチング領域を決定し、前記第1設定領域内の前記第1画像情報と、前記1次パターンマッチング領域内の前記第2画像情報との2次パターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項12】
請求項11記載のベッド位置決め装置において、前記位置決め用情報に基づき、前記ベッドの移動制御を行うベッド制御装置をさらに備えたことを特徴とするベッド位置決め装置。
【請求項13】
請求項11記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項14】
請求項13記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項15】
請求項11記載のベッド位置決め装置において、少なくとも前記第1設定領域内の前記第1画像情報及び少なくとも前記第2設定領域内の前記第2画像情報を表示する表示装置を備え、
前記演算処理装置は、前記第1設定領域及び前記第2設定領域のそれぞれの枠の表示情報を前記表示装置に出力することを特徴とするベッド位置決め装置。
【請求項16】
請求項11記載のベッド位置決め装置において、前記表示装置は、前記第1画像情報を表示する第1表示装置、及び前記第1表示装置とは別の、前記第2画像情報を表示する第2表示装置を含むことを特徴とするベッド位置決め装置。
【請求項17】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め方法において、
前記荷電粒子ビーム通路にX線を放出するX線放出装置を移動させ、
前記X放出装置からのX線を前記荷電粒子ビーム通路に沿って前記ベッド上の前記患者の患部に照射し、
前記荷電粒子ビーム進路内に位置する前記患者の部位を透過したX線をもとに前記患者のその部位に対する第2画像情報を生成し、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報を、演算処理装置に取り込み、
前記第2画像情報を前記演算処理装置に取り込み、
前記演算処理装置を利用して、前記第1画像情報のうち、前記アイソセンタを含む第1設定領域内の前記第1画像情報と、前記第2画像情報のうち、前記荷電粒子ビーム進路に対応する位置を含む第2設定領域内の前記第2画像情報とのパターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成する
ことを特徴とするベッド位置決め方法。
【請求項18】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め方法において、
前記荷電粒子ビーム通路にX線を放出するX線放出装置を移動させ、
前記X放出装置からのX線を前記荷電粒子ビーム通路に沿って前記ベッド上の前記患者の患部に照射し、
前記荷電粒子ビーム進路内に位置する前記患者の部位を透過したX線をもとに前記患者のその部位に対する第2画像情報を生成し、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報に対してアイソセンタを含む第1設定領域を設定し、
前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含み前記第1設定領域と略同じ大きさの第2設定領域を設定し、
前記第1設定領域内の前記第1画像情報と、前記第2設定領域内の前記第2画像情報との1次パターンマッチングを行って、前記第2画像情報に対する1次マッチング領域を決定し、
前記第1設定領域内の前記第1画像情報と、前記1次パターンマッチング領域内の前記第2画像情報との2次パターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成する
ことを特徴とするベッド位置決め方法。
【特許請求の範囲】
【請求項1】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
X線を放射するX線放出装置と、
このX線放出装置から出射されたX線を入射してそのX線に応じた出力信号を出力するX線入射装置と、
前記X線入射装置から出力された前記出力信号を用いて、荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報生成装置と、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域と、前記第2画像情報の画像領域よりも狭くて前記第2設定領域より広い探索領域とを設定し、前記探索領域の範囲内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項2】
請求項1記載のベッド位置決め装置において、前記位置決め用情報に基づき、前記ベッドの移動制御を行うベッド制御装置をさらに備えたことを特徴とするベッド位置決め装置。
【請求項3】
請求項1記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項4】
請求項3記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項5】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
X線放出装置と、
このX線放出装置から出射されたX線に応じた信号を用いて、荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報発生装置と、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる第1画像情報、及び前記第2画像情報を表示する表示装置と、
前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域を設定するとともに、前記第1設定領域を示す枠と前記第2設定領域を示す枠を前記表示装置に表示し、前記第2画像情報の領域内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項6】
請求項5記載のベッド位置決め装置において、前記表示装置は、前記第1画像情報を表示する第1表示装置、及び前記第1表示装置とは別の、前記第2画像情報を表示する第2表示装置を含むことを特徴とするベッド位置決め装置。
【請求項7】
請求項5記載のベッド位置決め装置において、前記画像情報発生装置は、前記入射したX線を光に変換するX線変換装置と、前記光を撮影し前記第2画像情報を生成するカメラとを備えることを特徴とするベッド位置決め装置。
【請求項8】
請求項5記載のベッド位置決め装置において、前記画像情報発生装置は、前記入射したX線を電気信号に変換する複数の半導体放射線検出器と、前記半導体放射線検出器毎に設けられて前記電気信号を処理する信号処理装置と、前記各信号処理装置の出力を入力して前記第2画像情報を生成する画像情報生成装置とを備えることを特徴とするベッド位置決め装置。
【請求項9】
請求項5記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項10】
請求項9記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項11】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め方法において、
荷電粒子ビーム進路内に位置する前記患者の部位を透過したX線をもとに前記患者のその部位に対する第2画像情報を生成し、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる前記第1画像情報を、演算処理装置に取り込み、
前記第2画像情報を前記演算処理装置に取り込み、
前記演算処理装置を利用して、前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域と、前記第2画像情報の画像領域よりも狭くて前記第2設定領域より広い探索領域とを設定、前記探索領域の範囲内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って 前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成することを特徴とするベッド位置決め方法。
【請求項12】
請求項1又は5記載のベッド位置決め装置において、前記X線放出装置は、前記粒子線照射装置に装着され、荷電粒子ビーム進路内に位置する第1のポジションと、前記荷電粒子ビーム進路から離れて前記荷電粒子ビームの進行が妨げられない第2のポジションとの間を移動し、前記第1のポジションでX線を放出することを特徴とするベッド位置決め装置。
【請求項13】
請求項1又は5記載のベッド位置決め装置において、前記画像情報生成装置は、前記第2画像情報の画像の中心が前記荷電粒子ビーム進路と一致するよう前記第2画像を生成し、前記演算処理装置は、前記第1設定領域を前記第1画像情報に対して前記第1設定領域の中心が前記アイソセンタと一致するよう設定し、前記第2設定領域を前記第2画像情報に対して前記第2設定領域の中心が前記第2画像情報の画像の中心である前記荷電粒子ビーム進路と一致するよう設定し、前記第2画像情報の画像の中心と前記パターンマッチングにより抽出した第2設定領域の中心との位置ずれ量により前記ベッドの位置決めに用いる情報を生成することを特徴とするベッド位置決め装置。
【請求項14】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
X線放出装置と、
このX線放出装置から出射されたX線に応じた信号を用いて、荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報発生装置と、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる第1画像情報、及び前記第2画像情報を表示する表示装置と、
前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域と、前記第2画像情報の画像領域よりも狭くて前記第2設定領域より広い探索領域とを設定するとともに、前記第1設定領域を示す枠と前記第2設定領域を示す枠を前記表示装置に表示し、前記探索領域の範囲内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項15】
粒子線発生装置と、
前記粒子線発生装置から供給された荷電粒子ビームを患者の患部に照射する粒子線照射装置と、
前記患者を支持するベッドと、
X線を放射するX線放出装置と、このX線放出装置から出射されたX線を入射してそのX線に応じた出力信号を出力するX線入射装置と、前記X線入射装置から出力された前記出力信号を用いて、荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報生成装置と、前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域と、前記第2画像情報の画像領域よりも狭くて前記第2設定領域より広い探索領域とを設定し、前記探索領域の範囲内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成する演算処理装置と、を備えたベッド位置決め装置と、
前記位置決め用情報に基づき前記ベッドの移動制御を行うベッド制御装置と、
前記ベッド制御装置に基づき前記ベッドを移動させるベッド駆動装置とを備えたことを特徴とする粒子線治療装置。
【請求項16】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め方法において、
荷電粒子ビーム進路内に位置する前記患者の部位を透過したX線をもとに前記患者のその部位に対する第2画像情報を生成し、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる前記第1画像情報を、演算処理装置に取り込み、
前記第2画像情報を前記演算処理装置に取り込み、
前記演算処理装置を利用して、前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域を設定するとともに、前記第1設定領域を示す枠と前記第2設定領域を示す枠を前記表示装置に表示し、前記第2画像情報の領域内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成することを特徴とするベッド位置決め方法。
【請求項1】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
前記粒子線照射装置に装着され、荷電粒子ビーム進路内に位置する第1のポジションと、前記荷電粒子ビーム進路から離れて前記荷電粒子ビームの進行が妨げられない第2のポジションとの間を移動し、前記第1のポジションでX線を放射するX線放出装置と、
このX線放出装置から出射されたX線を入射してそのX線に応じた出力信号を出力するX線入射装置と、
前記X線入射装置から出力された前記出力信号を用いて、前記荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報生成装置と、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報のうち、前記アイソセンタを含む第1設定領域内の前記第1画像情報と、前記第2画像情報のうち、前記荷電粒子ビーム進路に対応する位置を含む第2設定領域内の前記第2画像情報とのパターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項2】
請求項1記載のベッド位置決め装置において、前記位置決め用情報に基づき、前記ベッドの移動制御を行うベッド制御装置をさらに備えたことを特徴とするベッド位置決め装置。
【請求項3】
請求項1記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項4】
請求項3記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項5】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
前記粒子線照射装置に装着され、荷電粒子ビーム進路内に位置する第1のポジションと、前記荷電粒子ビーム進路から離れて前記荷電粒子ビームの進行が妨げられない第2のポジションとの間を移動し、前記第1のポジションでX線を放射するX線放出装置と、
このX線放出装置から出射されたX線に応じた信号を用いて、前記荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報発生装置と、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報、及び前記第2画像情報を表示する表示装置と、
前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域を設定し、前記第1設定領域内の前記第1画像情報と、前記第2設定領域内の前記第2画像情報とのパターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成し、前記第1設定領域及び前記第2設定領域のそれぞれの枠の表示情報を前記表示装置に出力する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項6】
請求項5記載のベッド位置決め装置において、前記表示装置は、前記第1画像情報を表示する第1表示装置、及び前記第1表示装置とは別の、前記第2画像情報を表示する第2表示装置を含むことを特徴とするベッド位置決め装置。
【請求項7】
請求項5記載のベッド位置決め装置において、前記画像情報発生装置は、前記入射したX線を光に変換するX線変換装置と、前記光を撮影し前記第2画像情報を生成するカメラとを備えることを特徴とするベッド位置決め装置。
【請求項8】
請求項5記載のベッド位置決め装置において、前記画像情報発生装置は、前記入射したX線を電気信号に変換する複数の半導体放射線検出器と、前記半導体放射線検出器毎に設けられて前記電気信号を処理する信号処理装置と、前記各信号処理装置の出力を入力して前記第2画像情報を生成する画像情報生成装置とを備えることを特徴とするベッド位置決め装置。
【請求項9】
請求項5記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項10】
請求項9記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項11】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
前記粒子線照射装置に装着され、荷電粒子ビーム進路内に位置する第1のポジションと、前記荷電粒子ビーム進路から離れて前記荷電粒子ビームの進行が妨げられない第2のポジションとの間を移動し、前記第1のポジションでX線を放射するX線放出装置と、
このX線放出装置から出射されたX線に応じた信号を用いて、前記荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報発生装置と、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含み前記第1設定領域と略同じ大きさの第2設定領域を設定し、前記第1設定領域内の前記第1画像情報と、前記第2設定領域内の前記第2画像情報との1次パターンマッチングを行って、前記第2画像情報に対する1次マッチング領域を決定し、前記第1設定領域内の前記第1画像情報と、前記1次パターンマッチング領域内の前記第2画像情報との2次パターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項12】
請求項11記載のベッド位置決め装置において、前記位置決め用情報に基づき、前記ベッドの移動制御を行うベッド制御装置をさらに備えたことを特徴とするベッド位置決め装置。
【請求項13】
請求項11記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項14】
請求項13記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項15】
請求項11記載のベッド位置決め装置において、少なくとも前記第1設定領域内の前記第1画像情報及び少なくとも前記第2設定領域内の前記第2画像情報を表示する表示装置を備え、
前記演算処理装置は、前記第1設定領域及び前記第2設定領域のそれぞれの枠の表示情報を前記表示装置に出力することを特徴とするベッド位置決め装置。
【請求項16】
請求項11記載のベッド位置決め装置において、前記表示装置は、前記第1画像情報を表示する第1表示装置、及び前記第1表示装置とは別の、前記第2画像情報を表示する第2表示装置を含むことを特徴とするベッド位置決め装置。
【請求項17】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め方法において、
前記荷電粒子ビーム通路にX線を放出するX線放出装置を移動させ、
前記X放出装置からのX線を前記荷電粒子ビーム通路に沿って前記ベッド上の前記患者の患部に照射し、
前記荷電粒子ビーム進路内に位置する前記患者の部位を透過したX線をもとに前記患者のその部位に対する第2画像情報を生成し、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報を、演算処理装置に取り込み、
前記第2画像情報を前記演算処理装置に取り込み、
前記演算処理装置を利用して、前記第1画像情報のうち、前記アイソセンタを含む第1設定領域内の前記第1画像情報と、前記第2画像情報のうち、前記荷電粒子ビーム進路に対応する位置を含む第2設定領域内の前記第2画像情報とのパターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成する
ことを特徴とするベッド位置決め方法。
【請求項18】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め方法において、
前記荷電粒子ビーム通路にX線を放出するX線放出装置を移動させ、
前記X放出装置からのX線を前記荷電粒子ビーム通路に沿って前記ベッド上の前記患者の患部に照射し、
前記荷電粒子ビーム進路内に位置する前記患者の部位を透過したX線をもとに前記患者のその部位に対する第2画像情報を生成し、
前記患者の患部を対象とする第1画像情報であってアイソセンタを含む基準となる前記第1画像情報に対してアイソセンタを含む第1設定領域を設定し、
前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含み前記第1設定領域と略同じ大きさの第2設定領域を設定し、
前記第1設定領域内の前記第1画像情報と、前記第2設定領域内の前記第2画像情報との1次パターンマッチングを行って、前記第2画像情報に対する1次マッチング領域を決定し、
前記第1設定領域内の前記第1画像情報と、前記1次パターンマッチング領域内の前記第2画像情報との2次パターンマッチングを行い、前記ベッドの位置決めに用いる情報を生成する
ことを特徴とするベッド位置決め方法。
【特許請求の範囲】
【請求項1】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
X線を放射するX線放出装置と、
このX線放出装置から出射されたX線を入射してそのX線に応じた出力信号を出力するX線入射装置と、
前記X線入射装置から出力された前記出力信号を用いて、荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報生成装置と、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域と、前記第2画像情報の画像領域よりも狭くて前記第2設定領域より広い探索領域とを設定し、前記探索領域の範囲内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項2】
請求項1記載のベッド位置決め装置において、前記位置決め用情報に基づき、前記ベッドの移動制御を行うベッド制御装置をさらに備えたことを特徴とするベッド位置決め装置。
【請求項3】
請求項1記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項4】
請求項3記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項5】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
X線放出装置と、
このX線放出装置から出射されたX線に応じた信号を用いて、荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報発生装置と、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる第1画像情報、及び前記第2画像情報を表示する表示装置と、
前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域を設定するとともに、前記第1設定領域を示す枠と前記第2設定領域を示す枠を前記表示装置に表示し、前記第2画像情報の領域内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項6】
請求項5記載のベッド位置決め装置において、前記表示装置は、前記第1画像情報を表示する第1表示装置、及び前記第1表示装置とは別の、前記第2画像情報を表示する第2表示装置を含むことを特徴とするベッド位置決め装置。
【請求項7】
請求項5記載のベッド位置決め装置において、前記画像情報発生装置は、前記入射したX線を光に変換するX線変換装置と、前記光を撮影し前記第2画像情報を生成するカメラとを備えることを特徴とするベッド位置決め装置。
【請求項8】
請求項5記載のベッド位置決め装置において、前記画像情報発生装置は、前記入射したX線を電気信号に変換する複数の半導体放射線検出器と、前記半導体放射線検出器毎に設けられて前記電気信号を処理する信号処理装置と、前記各信号処理装置の出力を入力して前記第2画像情報を生成する画像情報生成装置とを備えることを特徴とするベッド位置決め装置。
【請求項9】
請求項5記載のベッド位置決め装置において、前記演算処理装置は、前記パターンマッチングを、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報とを用いて行うことを特徴とするベッド位置決め装置。
【請求項10】
請求項9記載のベッド位置決め装置において、前記演算処理装置は、前記第1設定領域内の前記第1画像情報における複数の画素情報と、前記第2設定領域内の前記第2画像情報における複数の画素情報との偏差が最も少なくなるように、最小自乗法によって前記位置決め用情報を生成することを特徴とするベッド位置決め装置。
【請求項11】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め方法において、
荷電粒子ビーム進路内に位置する前記患者の部位を透過したX線をもとに前記患者のその部位に対する第2画像情報を生成し、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる前記第1画像情報を、演算処理装置に取り込み、
前記第2画像情報を前記演算処理装置に取り込み、
前記演算処理装置を利用して、前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域と、前記第2画像情報の画像領域よりも狭くて前記第2設定領域より広い探索領域とを設定、前記探索領域の範囲内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って 前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成することを特徴とするベッド位置決め方法。
【請求項12】
請求項1又は5記載のベッド位置決め装置において、前記X線放出装置は、前記粒子線照射装置に装着され、荷電粒子ビーム進路内に位置する第1のポジションと、前記荷電粒子ビーム進路から離れて前記荷電粒子ビームの進行が妨げられない第2のポジションとの間を移動し、前記第1のポジションでX線を放出することを特徴とするベッド位置決め装置。
【請求項13】
請求項1又は5記載のベッド位置決め装置において、前記画像情報生成装置は、前記第2画像情報の画像の中心が前記荷電粒子ビーム進路と一致するよう前記第2画像を生成し、前記演算処理装置は、前記第1設定領域を前記第1画像情報に対して前記第1設定領域の中心が前記アイソセンタと一致するよう設定し、前記第2設定領域を前記第2画像情報に対して前記第2設定領域の中心が前記第2画像情報の画像の中心である前記荷電粒子ビーム進路と一致するよう設定し、前記第2画像情報の画像の中心と前記パターンマッチングにより抽出した第2設定領域の中心との位置ずれ量により前記ベッドの位置決めに用いる情報を生成することを特徴とするベッド位置決め装置。
【請求項14】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め装置において、
X線放出装置と、
このX線放出装置から出射されたX線に応じた信号を用いて、荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報発生装置と、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる第1画像情報、及び前記第2画像情報を表示する表示装置と、
前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域と、前記第2画像情報の画像領域よりも狭くて前記第2設定領域より広い探索領域とを設定するとともに、前記第1設定領域を示す枠と前記第2設定領域を示す枠を前記表示装置に表示し、前記探索領域の範囲内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成する演算処理装置とを備えたことを特徴とするベッド位置決め装置。
【請求項15】
粒子線発生装置と、
前記粒子線発生装置から供給された荷電粒子ビームを患者の患部に照射する粒子線照射装置と、
前記患者を支持するベッドと、
X線を放射するX線放出装置と、このX線放出装置から出射されたX線を入射してそのX線に応じた出力信号を出力するX線入射装置と、前記X線入射装置から出力された前記出力信号を用いて、荷電粒子ビーム進路内に位置する前記患者の部位に対する第2画像情報を生成する画像情報生成装置と、前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域と、前記第2画像情報の画像領域よりも狭くて前記第2設定領域より広い探索領域とを設定し、前記探索領域の範囲内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成する演算処理装置と、を備えたベッド位置決め装置と、
前記位置決め用情報に基づき前記ベッドの移動制御を行うベッド制御装置と、
前記ベッド制御装置に基づき前記ベッドを移動させるベッド駆動装置とを備えたことを特徴とする粒子線治療装置。
【請求項16】
粒子線照射装置からの荷電粒子ビームが照射される患者を支持するベッドの位置決めを行うベッド位置決め方法において、
荷電粒子ビーム進路内に位置する前記患者の部位を透過したX線をもとに前記患者のその部位に対する第2画像情報を生成し、
前記患者の患部の画像データに基づいて予め作成されたアイソセンタを含む基準画像となる前記第1画像情報を、演算処理装置に取り込み、
前記第2画像情報を前記演算処理装置に取り込み、
前記演算処理装置を利用して、前記第1画像情報に対して前記アイソセンタを含む第1設定領域を設定し、前記第2画像情報に対して前記荷電粒子ビーム進路に対応する位置を含む第2設定領域を設定するとともに、前記第1設定領域を示す枠と前記第2設定領域を示す枠を前記表示装置に表示し、前記第2画像情報の領域内で前記第2設定領域を、順次、移動させて、前記第2設定領域のそれぞれの位置で、前記第1設定領域内の前記第1画像情報と前記第2設定領域内の前記第2画像情報とのパターンマッチングを行って、前記第1設定領域の前記第1画像情報と最も類似した第2画像情報を持つ第2設定領域を抽出し、この抽出した第2設定領域に基づいて前記ベッドの位置決めに用いる情報を生成することを特徴とするベッド位置決め方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−61711(P2006−61711A)
【公開日】平成18年3月9日(2006.3.9)
【国際特許分類】
【出願番号】特願2005−301779(P2005−301779)
【出願日】平成17年10月17日(2005.10.17)
【分割の表示】特願2003−58199(P2003−58199)の分割
【原出願日】平成15年3月5日(2003.3.5)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成18年3月9日(2006.3.9)
【国際特許分類】
【出願日】平成17年10月17日(2005.10.17)
【分割の表示】特願2003−58199(P2003−58199)の分割
【原出願日】平成15年3月5日(2003.3.5)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]