
ベルトコンベヤ
【課題】 ベルトコンベヤにおいて必要なときだけ人力でコイルばねを圧縮して蓄えられた弾性力を有効に用いて搬送ベルトを走行させられ、電力を一切用いず大幅に省エネルギー化を図れること。
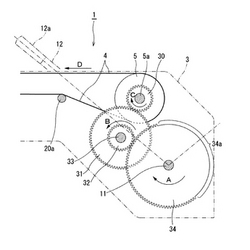
【解決手段】 入力レバー12を右回りに回動させると入力軸11も、入力軸11に固定された歯車34も一体に矢印A方向へ回動し、歯車32,31は矢印B方向へ、歯車30及び駆動軸5aは矢印C方向へ回動して、駆動軸5aに固定された第2のプーリーを回転させてワイヤを巻き取り、コイルばねを圧縮して、弾性エネルギーが蓄積されて行く。矢印A方向への回動角度が約150度に達すると、歯車34の歯のない部分34aの端が歯車32との噛み合い部分に到達して噛み合いが外れ、回転軸33及び駆動軸5aはそれぞれコイルばねが弛緩するエネルギーによって各矢印とは逆方向に回転し、駆動ローラ5が左回り方向に回転して搬送ベルト4を矢印D方向へ走行させる。
【解決手段】 入力レバー12を右回りに回動させると入力軸11も、入力軸11に固定された歯車34も一体に矢印A方向へ回動し、歯車32,31は矢印B方向へ、歯車30及び駆動軸5aは矢印C方向へ回動して、駆動軸5aに固定された第2のプーリーを回転させてワイヤを巻き取り、コイルばねを圧縮して、弾性エネルギーが蓄積されて行く。矢印A方向への回動角度が約150度に達すると、歯車34の歯のない部分34aの端が歯車32との噛み合い部分に到達して噛み合いが外れ、回転軸33及び駆動軸5aはそれぞれコイルばねが弛緩するエネルギーによって各矢印とは逆方向に回転し、駆動ローラ5が左回り方向に回転して搬送ベルト4を矢印D方向へ走行させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、必要なときだけ伸縮エネルギー蓄積機構にエネルギーを蓄積して人力でそのエネルギーを開放してワイヤを巻き取ることによって搬送ベルトを走行させることができる省エネルギータイプのベルトコンベヤに関するものである。
【背景技術】
【0002】
従来のベルトコンベヤは、一般に無端状の搬送ベルトを備え、この搬送ベルトは電動モータ或いは空気圧モータによって回転される駆動ローラによって走行させられ、搬送ベルトの上面に載置されたワークを搬送するものである。
【0003】
例えば、特許文献1に開示された特許発明にかかるベルトコンベヤにおいては、搬送ベルトの損傷を小さくする工夫がなされているが、モータを内蔵した駆動ローラや減速機付きモータに接続された駆動ローラ等によって搬送ベルトを駆動している。
【特許文献1】特許第3058637号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に開示されたベルトコンベヤを始めとする従来のベルトコンベヤは、いずれも電動モータ或いは空気圧モータ等によって駆動されるものであるから、結局は電力を必要とする。特に、大きな工場等では24時間ベルトコンベヤを稼動し続ける場合も多く、ワークを搬送しない場合でもベルトコンベヤだけが稼動している場合もあることから多大な電気エネルギーの浪費となる。また、ベルトコンベヤを好みの距離だけ走行させたり、ベルトコンベヤ上のワークを好みの位置まで搬送したり、さらにはベルトコンベヤを微小距離送るといった細かい制御は、従来の電動モータ・空気圧モータ等による駆動システムでは制御系が著しく複雑になり、多大な費用がかかるという問題点があった。
【0005】
そこで、本発明は、必要なときだけ伸縮エネルギー蓄積機構にエネルギーを蓄積して人力でそのエネルギーを開放することによって搬送ベルトを走行させることができ、電力を殆ど或いは一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御を容易に行うことができるベルトコンベヤを提供することを課題とするものである。
【課題を解決するための手段】
【0006】
請求項1の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、前記1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、人的エネルギーが前記伸縮エネルギー蓄積機構に加えられると、前記伸縮エネルギー蓄積機構に蓄積されたエネルギーによって長さ方向の伸縮が変化し、前記駆動ローラを特定方向のみ機械的に回転させる回転自在なプーリーとを具備するものである。
【0007】
請求項2の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、前記1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、前記伸縮エネルギー蓄積機構に蓄積されたエネルギーが放出されるときにスライドする回転自在な第1のプーリーと、一端を前記駆動軸の近傍の前記1対のフレームに設けられた止め具に固定され、他端を前記第1のプーリーに掛けてから前記駆動軸に一体に回転自在に固定された第2のプーリーに固定されて該第2のプーリーに巻き付けられたワイヤと、前記1対のフレームに前記駆動軸と離して軸支された入力軸と、前記入力軸と前記駆動軸の間に設けられた前記入力軸の回転を前記駆動軸に回転数を増大して伝達する回転数増大伝達機構と、前記入力軸にその一端が固定された入力レバーとを具備するものである。
【0008】
請求項3の発明にかかるベルトコンベヤは、請求項1または請求項2の構成において、前記伸縮エネルギー蓄積機構は、前記1対のフレームに前記搬送ベルトと平行に固定されたフランジ付きガイドと、前記フランジ付きガイドに嵌合して前記搬送ベルトと平行方向にスライドする長いロッドと、前記長いロッドの前記従動ローラよりに固定されたばねホルダと前記フランジ付きガイドのフランジとの間に前記長いロッドを取り巻いて取付けられたコイルばねとを具備するものである。
【0009】
請求項4の発明にかかるベルトコンベヤは、請求項1乃至請求項3のいずれか1つの構成において、前記駆動ローラは前記駆動軸が回転して前記伸縮エネルギー蓄積機構がエネルギーを蓄積するときには回転せず、前記駆動軸が回転して前記伸縮エネルギー蓄積機構が蓄積されたエネルギーを放出するときには回転するように、ワンウェイクラッチを介して前記駆動軸に取付けられているものである。
【0010】
請求項5の発明にかかるベルトコンベヤは、請求項3または請求項4の構成において、前記回転数増大伝達機構は前記入力軸及び前記駆動軸に固定された歯車を含む複数の歯車とその回転軸の組み合わせからなり、前記入力軸に固定された歯車には、前記入力レバーが回動されることによって前記コイルばねが充分圧縮された位置において該歯車に係合している歯車から係合が外れるように歯がない部分が設けられているものである。
【0011】
請求項6の発明にかかるベルトコンベヤは、請求項5の構成において、前記入力軸に固定された歯車に係合する歯車の全ての歯は、前記入力軸に固定された歯車の歯がない部分に隣接された端部の歯が再び前記歯車と係合するときに回転して描く歯先の軌跡に相当する部分が削り落とされているものである。
【0012】
請求項7の発明にかかるベルトコンベヤは、請求項3乃至請求項6のいずれか1つの構成において、前記回転数増大伝達機構を構成する複数の歯車のうち前記入力軸及び前記駆動軸に固定された歯車以外の1つ以上の歯車が、その歯車の回転軸が前記コイルばねが圧縮される方向に回転するときには一体に回転し、前記駆動軸が前記コイルばねが弛緩する方向に回転するときには回転力を伝達しないように、ワンウェイクラッチを介して前記回転軸に取付けられているものである。
【0013】
請求項8の発明にかかるベルトコンベヤは、請求項1乃至請求項7のいずれか1つの構成において、前記駆動ローラの内部には前記駆動ローラの慣性を増すために全周に亘って重りが取付けられているものである。
【0014】
請求項9の発明にかかるベルトコンベヤは、請求項1乃至請求項8のいずれか1つの構成において、前記支持部材及び/または前記1対のフレームのいずれか一方または両方には前記搬送ベルトを必要な高さに支持するための複数の支持脚が取付けられているものである。
【0015】
請求項10の発明にかかるベルトコンベヤは、請求項2乃至請求項9のいずれか1つの構成において、前記入力レバーの代わりに前記入力軸の一端に回転式ハンドルを取付けたものである。
【0016】
請求項11の発明にかかるベルトコンベヤは、請求項10の構成において、前記入力軸と前記回転式ハンドルとの間にクラッチ機構を設けたものである。
【0017】
請求項12の発明にかかるベルトコンベヤは、請求項2乃至請求項9のいずれか1つの構成において、前記入力レバーの代わりにまたは前記入力レバーの先端に前記入力軸に回動力を伝達する足踏みペダルを設けたものである。
【発明の効果】
【0018】
請求項1の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、駆動ローラと従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、駆動ローラと従動ローラの間において、搬送ベルトの下方向への移動を制限し、搬送ベルトの裏面を支持する支持部材と、長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、人的エネルギーが伸縮エネルギー蓄積機構に加えられると、伸縮エネルギー蓄積機構に蓄積されたエネルギーによって長さ方向の伸縮変化が変位し、駆動ローラを特定方向のみ機械的に回転させる回転自在なプーリーとを具備するものである。
【0019】
ここで、伸縮エネルギー蓄積機構としては、スライド機構の中にコイルばねまたは板ばねを組み込んだもの、弾性ゴムを組み込んだもの、縮めた状態でストッパーを掛けたエアシリンダにエアポンプで圧縮空気を送り込むもの、エアシリンダを入力レバーで圧縮または膨張させるもの、コイルばねまたはエアシリンダにピニオンロッドを取付け、直接プーリーとの噛み合わせで回転させるもの等を用いることができる。
【0020】
これによって、人的エネルギーが伸縮エネルギー蓄積機構に加えられると、伸縮エネルギー蓄積機構に蓄積されたエネルギーによって長さ方向の伸縮変化が変位し、プーリーの回転を介して駆動ローラを特定方向のみ機械的に回転させるため、駆動ローラに掛けられた搬送ベルトが所定の方向へ走行する。
【0021】
このようにして、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0022】
請求項2の発明にかかるベルトコンベヤにおいては、搬送ベルトを走行させる駆動ローラが取付けられた駆動軸と入力レバーの一端が固定された入力軸との間に回転数増大伝達機構が設けられているため、入力レバーの他端を持って所定方向に回動させると入力軸の回動が何回転にもなって駆動軸に伝達され、駆動軸に一体に取付けられた第2のプーリーが回転してワイヤが巻き取られる。これによって、ワイヤが掛けられた第1のプーリーが第2のプーリー側に引張られ、この状態において伸縮エネルギー蓄積機構にエネルギーが蓄積される。
【0023】
そこで、人力でストッパー等を開放すれば、伸縮エネルギー蓄積機構に蓄えられていたエネルギーによって第2のプーリーと一体に駆動軸が回転し、駆動ローラも一体に回転して搬送ベルトを走行させる。そして、搬送ベルトの走行距離は伸縮エネルギー蓄積機構に蓄積されるエネルギーと駆動軸の回転数の関係を予め調べておけば、自在に調節することができる。
【0024】
このようにして、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0025】
請求項3の発明にかかるベルトコンベヤにおいては、搬送ベルトを走行させる駆動ローラが取付けられた駆動軸と入力レバーの一端が固定された入力軸との間に回転数増大伝達機構が設けられているため、入力レバーの他端を持って所定方向に回動させると入力軸の回動が何回転にもなって駆動軸に伝達され、駆動軸に一体に取付けられた第2のプーリーが回転してワイヤが巻き取られる。これによって、ワイヤが掛けられた第1のプーリーが第2のプーリー側に引張られるため、長いロッドも一体にスライドしてばねホルダがフランジ付きガイドのフランジに接近してコイルばねが圧縮される。そこで手を離せば、コイルばねが反発して伸びるとともに蓄えられていた弾性力によって第2のプーリーと一体に駆動軸が回転し、駆動ローラも一体に回転して搬送ベルトを走行させる。そして、搬送ベルトの走行距離は入力レバーを回動させる角度と駆動軸の回転数の関係を予め調べておけば、自在に調節することができる。
【0026】
これによって、電力を一切用いずに必要なときに必要なだけ搬送ベルトを走行させることができる。また、コイルばねの圧縮限界の範囲内で入力レバーを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルトを微小距離ずつ送ること(寸動送り)も容易である。
【0027】
このようにして、必要なときだけ手動でコイルばねを圧縮して搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0028】
請求項4の発明にかかるベルトコンベヤは、駆動ローラは駆動軸が回転して伸縮エネルギー蓄積機構がエネルギーを蓄積するときには回転せず、駆動軸が回転して伸縮エネルギー蓄積機構が蓄積されたエネルギーを放出するときには回転するように、ワンウェイクラッチを介して駆動軸に取付けられている。したがって、例えば請求項3にかかるベルトコンベヤにおいて、入力レバーを所定方向に所定角度回動させてコイルばねを圧縮するときには駆動ローラは回転しないので、搬送ベルトを逆方向に走行させることもなく、余分な力を必要とせず軽い力で入力レバーを回動させてコイルばねを圧縮することができる。
【0029】
そして、入力レバーから手を離してコイルばねが弛緩する方向に駆動軸が回転するときには、ワンウェイクラッチが噛み合って駆動ローラも駆動軸と一体に回転するので、搬送ベルトも所定方向に走行する。コイルばねの圧縮限界の範囲内で入力レバーを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルトを微小距離ずつ送ること(寸動送り)も容易である。
【0030】
このようにして、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0031】
請求項5の発明にかかるベルトコンベヤは、回転数増大伝達機構が入力軸及び駆動軸に固定された歯車を含む複数の歯車とその回転軸の組み合わせからなり、入力軸に固定された歯車には、入力レバーが回動されることによってコイルばねが充分圧縮された位置において該歯車に係合している歯車から係合が外れるように歯がない部分が設けられている。したがって、コイルばねが充分圧縮された時点で、入力軸に固定された歯車に係合している歯車は空回りする状態になるので、コイルばねが弛緩して駆動ローラが回転し搬送ベルトを走行させる。
【0032】
これによって、回転数増大伝達機構を構成する歯車と回転軸のうち、入力軸に固定された歯車と入力軸には回転力が伝達されないので入力レバーも元の位置に戻らず、コイルばねに蓄えられた弾性力が入力レバーを元の位置に回動させるために用いられることがなく、弾性力が余分な力に浪費されることなく有効に使われる。また、入力レバーが元の位置に回動するときに作業者に当ったりする危険も確実に回避される。さらに、入力レバーを所定の角度を越えて回動させることによってコイルばねが圧縮され過ぎて破損してしまう事態も確実に回避することができる。歯車が空転しない範囲内で入力レバーを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルトを微小距離ずつ送ること(寸動送り)も容易である。
【0033】
このようにして、必要なときだけ手動でコイルばねを圧縮して、かつコイルばねを圧縮し過ぎて破損させる恐れもなく、コイルばねに蓄えられた弾性力を有効に用いて搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0034】
請求項6の発明にかかるベルトコンベヤにおいては、入力軸に固定された歯車に係合する歯車の全ての歯は、入力軸に固定された歯車の歯がない部分に隣接された端部の歯が再び前記歯車と係合するときに回転して描く歯先の軌跡に相当する部分が削り落とされている。入力軸に固定された歯車の歯がない部分が係合する歯車との噛み合い部分に到達することによって、係合する歯車が空回りしてコイルばねが弛緩して駆動ローラが回転し搬送ベルトを走行させる。そして、また搬送ベルトを走行させるためには、入力軸に固定された歯車の歯のある部分を係合する歯車に再び噛み合わせて入力レバーを元の位置に回動させ、そこから入力レバーを回動させて再度コイルばねを圧縮する必要がある。
【0035】
しかしながら、入力軸に固定された歯車の歯がない部分に隣接された端部の歯が、必ずしも係合する歯車の歯と再度うまく噛み合うとは限らず、場合によっては両歯車の歯の頂部同士が衝突して噛み合わないという事態も生ずる。そこで、端部の歯が100%係合する歯車の歯と噛み合うように、端部の歯が回転して描く歯先の軌跡に相当する部分を、係合する歯車の全ての歯について削り落とした。これによって、両歯車の歯の頂部同士が衝突する位置に来たときでも、係合する歯車の歯先は削り落とされているので、端部の歯は衝突することなくすり抜けて次の歯の削られていない側に当接して、両歯車がうまく噛み合う。
【0036】
このようにして、歯がない部分を有する歯車とこれと係合する歯車とを常に確実に噛み合わせることができ、必要なときだけ手動でコイルばねを圧縮して、かつコイルばねを圧縮し過ぎて破損させる恐れもなく、コイルばねに蓄えられた弾性力を有効に用いて搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0037】
請求項7の発明にかかるベルトコンベヤは、回転数増大伝達機構を構成する複数の歯車のうち入力軸及び駆動軸に固定された歯車以外の1つ以上の歯車がワンウェイクラッチを介して回転軸に取付けられており、その回転軸がコイルばねが圧縮される方向に回転するときには一体に回転し、駆動軸がコイルばねが弛緩する方向に回転するときには回転力を伝達しないようになっている。
【0038】
したがって、入力レバーを回動させてコイルばねを圧縮するときには回転数を増大しながら回転力を伝達し、コイルばねが弛緩して駆動ローラが回転し搬送ベルトを走行させるときには回転軸と歯車のいずれかが空転して、入力軸及び入力レバーまで回転力を伝達しないので、回転数増大伝達機構を構成する複数の歯車の全てと入力軸及び入力レバーを回転させるのにコイルばねに蓄えられた弾性力を無駄に使うことなく、駆動軸とその近傍の歯車を回転させるだけで後は全て駆動ローラを回転させるのに用いられるので、搬送ベルトを効率良く走行させることができる。
【0039】
また、入力レバーを少し回動させて戻す動作を繰り返すことによって、寸動送りを繰り返して搬送ベルト上のワークの位置を微調整することもできる。
【0040】
このようにして、必要なときだけ手動でコイルばねを圧縮して、コイルばねに蓄えられた弾性力を有効に用いて搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0041】
請求項8の発明にかかるベルトコンベヤは、駆動ローラの内部に駆動ローラの慣性を増すために全周に亘って重りが取付けられている。これによって、伸縮エネルギー蓄積機構に蓄積されたエネルギーが開放されて駆動ローラが回転すると、慣性力によって駆動ローラが蓄積されたエネルギーによる回転数の数倍回転して、搬送ベルトをより長距離走行させることができる。
【0042】
このようにして、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0043】
請求項9の発明にかかるベルトコンベヤは、支持部材及び/または1対のフレームのいずれか一方または両方には搬送ベルトを必要な高さに支持するための複数の支持脚が取付けられている。ある程度の高さまでは、1対のフレームを高く作製することによって搬送ベルトを必要な高さに支持できるが、それにも限界があり、特に従動ローラと従動軸が取付けられるだけの第2のフレーム側においては、フレーム材料の無駄遣いとなる。そこで、搬送ベルトを支えるために1対のフレーム間に架け渡されている支持部材等に必要な高さの支持脚を取付けることによって、搬送ベルトを必要な高さに支持することができる。
【0044】
ここで、搬送ベルトは略水平に支持されるとは限らず、必要に応じて斜めに、即ち従動ローラ側が高くまたは従動ローラ側が低く支持される。また、支持部材に支持脚を取付ける場合には、支持部材の幅が搬送ベルトの幅より広く支持部材の両側面が搬送ベルトから突出している場合は、支持部材の両側面に直接複数の支持脚を取付けることができるが、支持部材の幅が搬送ベルトの幅より狭く支持部材の両側面が搬送ベルトより引っ込んでいる場合は、支持部材の両側面に支持脚の数だけの中継ぎ部材を搬送ベルトから突出するように取付けて、この中継ぎ部材に支持脚を取付ける必要がある。
【0045】
このようにして、必要な高さに搬送ベルトが支持されて、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0046】
請求項10の発明にかかるベルトコンベヤは、入力レバーの代わりに入力軸の一端に回転式ハンドルを取付けたものである。入力軸と駆動軸の間に設けられている回転数増大伝達機構によって、入力軸を半回転程度回動させただけで駆動軸は何回転もしてコイルばねまたは板ばねを一気に圧縮することができるが、その反面入力軸を回動させるための力は駆動軸を直接回転させるのに必要な力の何倍にもなる。
【0047】
そこで、ある程度の長さを有する入力レバーを入力軸に固定することによって、てこの原理で入力軸を楽に回動させることができるが、それに替えて回転式ハンドルを用いるとハンドルの径は小さいので、入力軸を回動させるためにはより大きな力を必要とする。その代わりに、スペースの節約になり、また請求項2及び請求項3の発明にかかるベルトコンベヤのように搬送ベルトが走行するときに入力軸まで回転力が戻ってくる形式のものでは、長い入力レバーが元の位置に回動するよりも小径の回転式ハンドルが回動する方が作業者にとってより安全である。
【0048】
このようにして、必要なときだけ人力でコイルばねを圧縮して、コイルばねに蓄えられた弾性力を有効に用いてより安全に搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0049】
請求項11の発明にかかるベルトコンベヤは、入力軸と回転式ハンドルとの間にクラッチ機構を設けたものである。これによって、回転式ハンドルを所定方向に所定角度回動させて回転数増大伝達機構を介してコイルばねを圧縮したら、クラッチ機構によって入力軸と回転式ハンドルとの接続を解放すれば、入力軸と回転数増大伝達機構を介してコイルばねが弛緩して駆動ローラが回転し、搬送ベルトが走行する。このとき、回転式ハンドルは回転しないので、請求項2及び請求項3の発明にかかるベルトコンベヤのように搬送ベルトが走行するときに入力軸まで回転力が戻ってくる形式のものでもより安全である。
【0050】
このようにして、必要なときだけ手動でコイルばねを圧縮して、コイルばねに蓄えられた弾性力を有効に用いてより安全に搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0051】
請求項12の発明にかかるベルトコンベヤは、入力レバーの代わりにまたは入力レバーの先端に入力軸に回動力を伝達する足踏みペダルを設けたものである。これによって、足踏みペダルを足で操作して、入力軸を所定方向に所定角度回動させることができ、コイルばねを圧縮して搬送ベルトを走行させることができる。また、足踏みペダルを踏み込んだ足を少しずつ戻すことによって、搬送ベルトを寸動送りすることも容易である。さらに、作業者の両手が自由になるので、ベルトコンベヤを駆動させながら他の作業を同時に行うこともできる。
【0052】
このようにして、必要なときだけ人力でコイルばねを圧縮して、コイルばねに蓄えられた弾性力を有効に用いてより安全に搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【発明を実施するための最良の形態】
【0053】
以下、本発明の実施の形態について、図面を参照しつつ説明する。
【0054】
実施の形態1
まず、本発明の実施の形態1について、図1乃至図6を参照して説明する。
【0055】
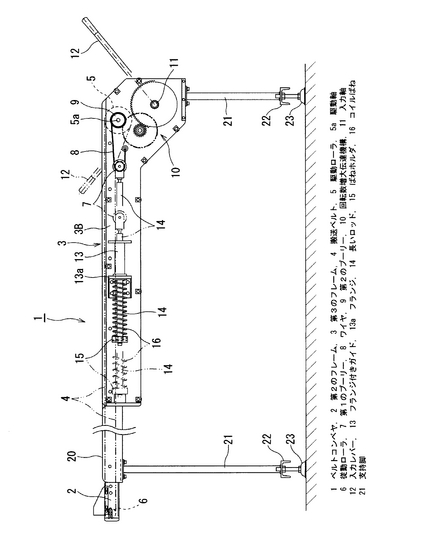
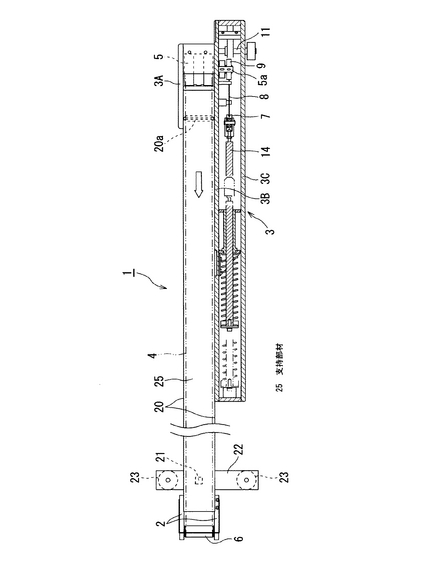
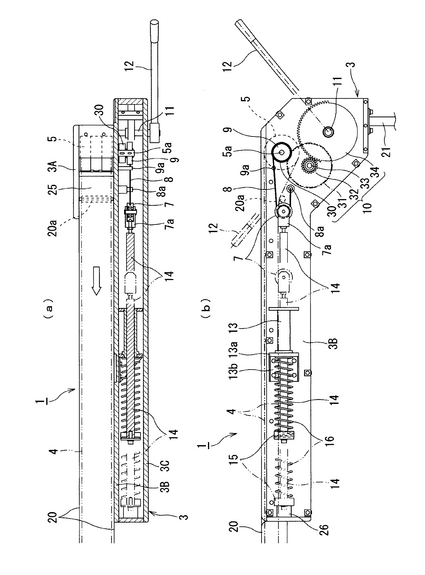
図1は本発明の実施の形態1にかかるベルトコンベヤの全体構成を第3のフレームの手前側フレーム板を外し、かつ中間部分を省略して示す側面図である。図2は本発明の実施の形態1にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図である。図3(a)は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を示す平面図、(b)は側面図である。図4は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構を示す縦断面図である。図5は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構を示す左側面図である。図6は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構の一部を拡大して示す左側面図である。
【0056】
図1に示されるように、本実施の形態1にかかるベルトコンベヤ1は、支持部材を間に挟んで組付けた第2のフレームとしての従動側フレーム2と、それと離間対向した、第3のフレーム3と中間のフレーム板を共用する第1のフレームとしての図示されない駆動側フレームと、駆動側フレームに軸支された駆動軸5aに一体回転可能に取付けられた駆動ローラ5と、従動側フレーム2に軸支された従動軸に一体回転可能に取付けられた従動ローラ6と、駆動ローラ5と従動ローラ6に掛け渡された無端状の走行可能な搬送ベルト4を中心として構成されている。
【0057】
さらに、これら1対の図示されない駆動側フレームと従動側フレーム2に両端を固定された支持部材としての図示されないアルミニウム板には、搬送ベルト4の両側面をカバーするように両側面に突出した断面コの字形のパネル20が、図示されない駆動側フレームと従動側フレーム2の間に亘ってネジ止めされており、コの字形パネル20の底面左端に1本と第3のフレーム3の右端に2本(1本は重なって見えない)、搬送ベルト4を必要な高さに支持するための支持脚21が取付けられている。安定を保つために、これら3本の支持脚21の下端には紙面に垂直方向に伸びるコの字形部材22がそれぞれ固定され、コの字形部材22の手前側と向う側にはそれぞれ支持底23が固定されている。
【0058】
第3のフレーム3の中間フレーム板にはフランジ付きガイド13が搬送ベルト4と平行に固定され、フランジ付きガイド13には長いロッド14が嵌合して搬送ベルト4と平行方向にガタツキなくスライドする。この長いロッド14の左端にはばねホルダ15が固定されており、フランジ付きガイド13のフランジ13aとばねホルダ15の間には、コイルばね16が長いロッド14を取り巻いて取付けられている。一方、長いロッド14の右端には第1のプーリー7が回転自在に取付けられ、第3のフレーム3の中間フレーム板3Bには丈夫でかつ柔軟なワイヤ8の一端が固定され、第1のプーリー7に掛けられてから、第3のフレーム3内に突出した駆動軸5aに一体回転自在に固定された第2のプーリー9に巻き付けられて、この第2のプーリー9にワイヤ8の他端が固定されている。
【0059】
さらに、第3のフレーム3の右端には、入力軸11が駆動軸5aと離して駆動軸5aと同じく水平に軸支されており、この入力軸11には入力レバー12が一体に回動可能に固定されている。そして、入力軸11と駆動軸5aとの間には、入力軸11の回転を駆動軸5aに回転数を増大して伝達する回転数増大伝達機構10が設けられている。
【0060】
次に、図2の平面図を参照して、本実施の形態1にかかるベルトコンベヤ1についてさらに説明する。図2に示されるように、第3のフレーム3の中間フレーム板3Bの向う側には、中間フレーム板3Bとの間で駆動軸5aを水平に軸支する第1のフレームの外側フレーム板3Aが設けられており、駆動軸5aには駆動ローラ5が一体回転可能に取付けられている。第1のフレーム(外側フレーム板3Aと中間フレーム板3Bの一部とからなる)とこれに離間対向して設けられた第2のフレーム2との間には、搬送ベルト4の上側を支持するための支持部材としてのアルミニウム板25が架け渡されて、第1のフレームと第2のフレーム2にそれぞれ固定されている。
【0061】
そして、駆動ローラ5と従動ローラ6には無端状の搬送ベルト4が張った状態で掛け渡されており、後述するように入力レバー12を操作することによって、白い矢印の方向へ高速で移動して製品等を搬送する。また、前述の如く、コの字形パネル20の底面左端には搬送ベルト4を必要な高さに支持するための支持脚21が取付けられている。安定を保つために、この支持脚21の下端にはコの字形部材22が固定され、コの字形部材22の両端にはそれぞれ支持底23が固定されている。第3のフレーム3の右端底面にも、同様の構造の支持脚が2本固定されているが、ここでは図示省略されている。
【0062】
次に、本実施の形態1にかかるベルトコンベヤ1の駆動機構について、図3を参照してさらに説明する。図3(a),(b)に示されるように、フランジ付きガイド13のフランジ13aにはブラケット13bが一体になっており、このブラケット13bにおいて、中間フレーム板3Bに4本のネジでネジ止めされている。また、図3(a)に示されるように、外側フレーム板3Aと中間フレーム板3Bの間には補助ローラ20aが回転自在に軸支されており、この補助ローラ20aは図3(b)に示されるように、搬送ベルト4の張りを一段と良くし、且つ搬送ベルト4の下側を従動ローラ6までの間、搬送ベルト4の上側とほぼ平行にし、見栄えを良くしたものである。
【0063】
また、コイルばね16が実線で示される圧縮された状態から想像線で示される伸びた状態となり、長いロッド14が実線で示される位置から想像線で示される位置まで高速でスライドする際に、ばねホルダ15が第3のフレーム3の左端に衝突する衝撃を緩和するために、ゴム製のストッパー26が設けられている。さらに、この際に第2のプーリー9が高速回転して巻き取られていたワイヤ8が波打って第2のプーリー9から外れるのを防ぐために、第2のプーリー9の近傍にワイヤ抑え9aが固定されている。このワイヤ抑え9aには端面に深い溝が切ってあり、ワイヤ8はこの溝の中を通っている。ワイヤ8の一端はワイヤ止め8aに強固に固定されており、第1のプーリー7に掛けられた後、前記ワイヤ抑え9aの深い溝の中を通って第2のプーリー9に巻き付けられ、ワイヤ8の他端は第2のプーリー9に強固に固定されている。
【0064】
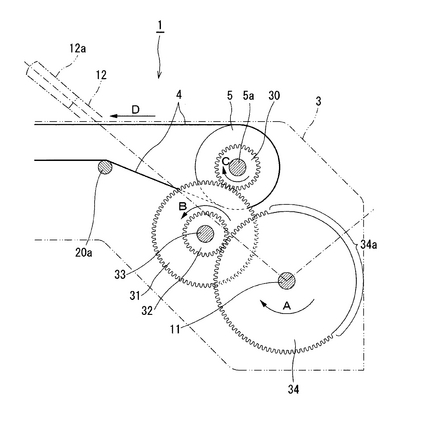
一方、第3のフレーム3内に突出した駆動軸5aに固定されている第2のプーリー9の向こう側には、やはり駆動軸5aと一体に回転する小径の歯車30が固定されており、この歯車30には第3のフレーム3に軸支された回転軸33と一体に回転する大径の歯車31が噛み合っている。この回転軸33には、やはり一体に回転する小径の歯車32が固定されており、この歯車32には約半周分しか歯が設けられていない大径の歯車34が噛み合っており、歯車34は入力軸11に一体回転可能に固定されている。入力軸11が回転することによって、これら歯車34,歯車32,回転軸33,歯車31,歯車30によって、回転数が増大されて駆動軸5aに回転が伝達される。したがって、これら歯車30,歯車31,歯車32,回転軸33及び歯車34は、回転数増大伝達機構10を構成している。
【0065】
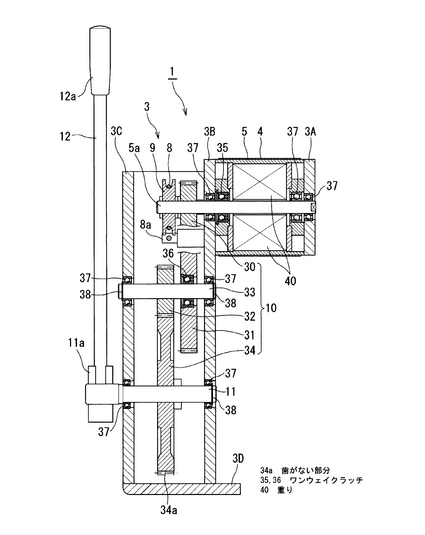
この回転数増大伝達機構10について、図4を参照してさらに詳細に説明する。図4に示されるように、第1のフレームを構成する2枚のメッキ鋼板3A,3Bの間には、駆動ローラ5が2枚のメッキ鋼板3A,3Bに2個のボールベアリング軸受け37によって水平に軸支された駆動軸5aに、ワンウェイクラッチ35及びボールベアリング軸受け37を介して、一体回転可能に取付けられている。駆動ローラ5の内部には、慣性を増すために全周に亘って重り40が取付けられており、駆動ローラ5の外周には搬送ベルト4が掛けられている。駆動軸5aの中間フレーム板3Bから突出した部分には、小径の歯車30が一体に固定されており、さらにその外側にはワイヤ8を巻き取る第2のプーリー9が固定されている。歯車30と噛み合う大径の歯車31は、両端をボールベアリング軸受け37で第3のフレーム3に水平に軸支された回転軸33に、ワンウェイクラッチ36を介して取付けられている。
【0066】
この回転軸33の中央よりには小径の歯車32が一体に固定されており、この歯車32と噛み合う大径の歯車34は、両端をボールベアリング軸受け37で第3のフレーム3に水平に軸支された入力軸11に、一体に固定されている。この歯車34には、外周の5分の2程度に亘って歯のない部分34aが設けられている。なお、ボールベアリング軸受け37で軸支された駆動軸5a、回転軸33、入力軸11の必要な箇所には、抜け止めリング38が嵌め込まれている。
【0067】
本実施の形態1にかかるベルトコンベヤ1の歯車34の歯数は、その噛み合いによってコイルばね16に対する蓄積するエネルギーを決定するので、当然、搬送ベルト4の移動距離、即ち、搬送距離が決定される。また、歯車32と歯車34の噛み合いが急激に外れるので、コイルばね16に蓄積したエネルギーを一気に出力をすることができて、高効率である。また、本実施の形態1においては、入力レバー12を図1,図3(b)に想像線で示される原位置から所定角度回動させると、歯車32と歯車34の噛み合わせ位置に歯車34の歯のない部分34aが到達して、歯車32が逆方向に空回りしてコイルばね16が弛緩するので、コイルばね16を圧縮し過ぎて破損する恐れはない。
【0068】
さらに、ワンウェイクラッチ35は、駆動軸5aがコイルばね16を圧縮する方向に回転するときには回転を駆動ローラ5に伝達せず、駆動軸5aがコイルばね16が弛緩する方向に回転するときには駆動ローラ5も一体に回転するように取付けられている。一方、ワンウェイクラッチ36は、回転軸33がコイルばね16を圧縮する方向に回転するときには回転を歯車31に伝達し、歯車31がコイルばね16が弛緩する方向に回転するときには、回転を回転軸33に伝達せず空転するように取付けられている。
【0069】
かかる構成を有するベルトコンベヤ1における搬送ベルト4の走行の仕組みについて、図1乃至図5を参照して説明する。作業者が図4に示される入力レバー12の先端のグリップ部12aを握って、図1において右回り(時計回り)方向に入力レバー12を回動させると、図4に示される回動リング11aを介して入力軸11も回動し、入力軸11に固定された歯車34も一体に回動する。すると、歯車34に噛み合っている歯車32も固定されている回転軸33と一体に回動し、この場合は回転軸33がコイルばね16を圧縮する方向に回動するので、ワンウェイクラッチ36は回動を歯車31に伝達して歯車31も一体に回動する。
【0070】
さらに、歯車31に噛み合っている歯車30も固定されている駆動軸5aと一体に回動し、駆動軸5aに固定されている第2のプーリー9はワイヤ8を巻き取る方向に回転する。これによって、図1に示されるように、想像線で示される原位置にあった第1のプーリー7はワイヤ8が巻き取られるに連れて右側へ引張られるので、長いロッド14も想像線で示される原位置から実線で示される位置までスライドして、弛緩していたコイルばね16も実線で示されるように圧縮される。このとき、図4に示されるワンウェイクラッチ35は回動を駆動ローラ5に伝達しないため搬送ベルト4が逆方向に走行することもなく、軽い力でコイルばね16を圧縮することができる。
【0071】
このようにして、図5に示されるように、歯車34が矢印A方向へ回動するにしたがって、歯車32,31は矢印B方向へ、歯車30及び駆動軸5aは矢印C方向へ回動して、コイルばね16が次第に強く圧縮されて弾性エネルギーが蓄積されて行く。そして、矢印A方向への回動角度が所定角度に達して、歯車34の歯のない部分34aの端が歯車32との噛み合い部分に到達すると噛み合いが外れ、回転軸33及び駆動軸5aはそれぞれコイルばね16が伸びるエネルギーによって各矢印とは逆方向に回転し、駆動ローラ5が左回り(反時計回り)方向に回転して搬送ベルト4を矢印D方向へ走行させる。
【0072】
このとき、図4に示されるワンウェイクラッチ35は駆動軸5aの回転を駆動ローラ5に伝達して回転させ、一方ワンウェイクラッチ36は歯車31の回転を回転軸33に伝達せず歯車31は空転する。したがって、駆動軸5aの回転力は駆動ローラ5を回転させる以外には歯車30,31を回転させるのに浪費されるだけで、コイルばね16に蓄積された弾性エネルギーが効率良く搬送ベルト4を走行させるのに用いられる。さらに、駆動ローラ5内部に重り40が取付けられているために、慣性力によって駆動ローラ5がコイルばね16の弛緩による回転数の数倍回転して、搬送ベルト4をより長距離走行させることができる。
【0073】
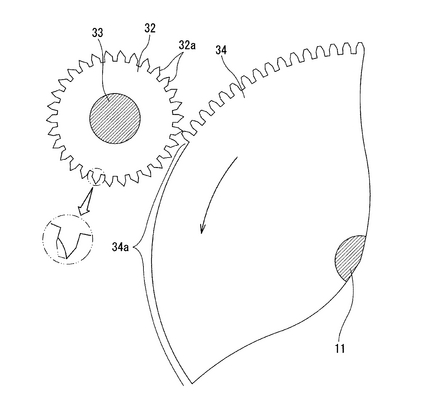
ここで、次に搬送ベルト4を走行させるためには、図6に示されるように、入力軸11に固定された歯車34を矢印の方向に回転させることによって、歯車34の歯のある部分を係合する歯車32に再び噛み合わせて入力レバー12を元の位置に回動させ、そこから入力レバー12を回動させて再度コイルばね16を圧縮する必要がある。しかしながら、入力軸11に固定された歯車34の歯がない部分34aに隣接された端部の歯が、必ずしも係合する歯車32の歯と再度うまく噛み合うとは限らず、場合によっては両歯車32,34の歯の頂部同士が衝突して噛み合わないという事態も生ずる。
【0074】
そこで、本実施の形態1においては、図6に示されるように、歯車34の端部の歯が100%係合する歯車32の歯と噛み合うように、歯車34の端部の歯が回転して描く歯先の軌跡に相当する部分32aが、係合する歯車32の全ての歯について削り落とされている。これによって、両歯車32,34の歯の頂部同士が衝突する位置に来たときでも、係合する歯車32の歯先32aは削り落とされているので、歯車34の端部の歯は衝突することなくすり抜けて次の歯の削られていない側に当接して、両歯車32,34が100%うまく噛み合う。
【0075】
このようにして、本実施の形態1にかかるベルトコンベヤ1においては、必要なときだけ手動でコイルばね16を圧縮して、搬送ベルト4を逆方向に走行させることなく、かつ軽い力でコイルばねバネ16を圧縮できて搬送ベルト4を走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、圧縮し過ぎてコイルばね16を破損させる恐れもない。
【0076】
また、図5に示される入力レバー12を小さい角度だけ矢印A方向へ回動させ、逆方向へ任意の角度だけ戻すことによって、搬送ベルト4を少しずつ走行(寸動送り)させることができる。但し、歯車31に設けられているワンウェイクラッチ36の作用によって、入力レバー12を逆方向へ戻して止めても歯車31が空転するため搬送ベルト4はその位置では止まらず、コイルばね16が完全に弛緩して駆動ローラ5の慣性力がなくなるまで走行する。
【0077】
実施の形態2
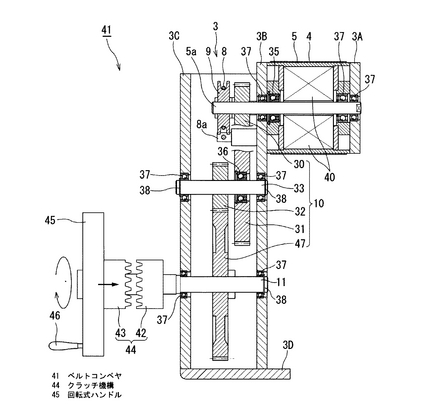
次に、本発明の実施の形態2について、図7を参照して説明する。図7は本発明の実施の形態2にかかるベルトコンベヤの駆動部分の構成を示す縦断面図である。図7に示されるように、本実施の形態2にかかるベルトコンベヤ41は、主要な部分の構成は実施の形態1のベルトコンベヤ1と同様であるので、同一部分には同一の符号を付して説明を省略する。異なるのは、入力軸11に固定された一部歯のない部分34aを有する歯車34の代わりに全周に歯を有する歯車47が入力軸11に固定されている点と、入力軸11の端にクラッチ機構44を介して入力レバー12の代わりに回転式ハンドル45が設けられている点である。
【0078】
クラッチ機構44は、入力軸11の端に固定された円筒状歯車42と、入力軸11に対して回転自在かつ前進後退可能に軸支された回転式ハンドル45に固定された円筒状歯車43とから構成されている。図7の状態においては、回転式ハンドル45が後退しており、クラッチ機構44は解放されている。この状態から回転式ハンドル45を矢印の方向へ前進させることによって、円筒状歯車42と円筒状歯車43とが噛み合ってクラッチ機構44は係合状態となり、取手46を持って回転式ハンドル45を右回り(時計回り)方向に回動させることによって、入力軸11が回転して実施の形態1と同様にして回転力が駆動軸5aまで伝達され、コイルばね16が圧縮される。
【0079】
ここで、本実施の形態2においては、入力軸11に固定された歯車47が全周に歯を有しており、コイルばね16の圧縮限界まで入力軸11が回動したときに、実施の形態1のように自動的に歯車32が空転してコイルばね16が弛緩するということがないので、コイルばね16の圧縮限界を越えて入力軸11を回動させてコイルばね16が破損する事態を防ぐために、第3のフレーム3の外側フレーム板3Cに回動範囲を明示しておくか、取手46に対するストッパーを設ける等の対策を取る必要がある。
【0080】
クラッチ機構44を係合状態として、取手46を持って回転式ハンドル45を回動範囲内の任意の角度まで回動させたら、回転式ハンドル45を両手で持って回転式ハンドル45及び円筒状歯車43を後退させる。これによって、クラッチ機構44は解放状態となり、入力軸11,歯車47,歯車32,回転軸33,歯車31,歯車30,駆動軸5aがコイルばね16に蓄えられた弾性エネルギーによって逆方向に回転して、ワンウェイクラッチ35の作用によって駆動ローラ5が駆動軸5aと一体に回転して、搬送ベルト4の上面が所定方向(紙面向う側方向)に送り出されて下面が駆動ローラ5に巻き取られ、搬送ベルト4が走行する。
【0081】
このとき、ワンウェイクラッチ36は歯車31の回転を回転軸33に伝達せず、歯車31は空転する。したがって、駆動軸5aの回転力は駆動ローラ5を回転させる以外には歯車30,31を回転させるのに浪費されるだけで、コイルばね16に蓄積された弾性エネルギーが効率良く搬送ベルト4を走行させるのに用いられる。さらに、駆動ローラ5内部に重り40が取付けられているので、慣性力によって駆動ローラ5がコイルばね16の弛緩による回転数の数倍回転して、搬送ベルト4をより長距離走行させることができる。
【0082】
このようにして、本実施の形態2にかかるベルトコンベヤ41においては、必要なときだけ手動でコイルばね16を圧縮して、搬送ベルト4を逆方向に走行させることなく、かつ軽い力でコイルばね16を圧縮して搬送ベルト4を走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、長い入力レバー12の代わりに回転式ハンドル45を用いたため、狭いスペースにも設置することができる。
【0083】
実施の形態3
次に、本発明の実施の形態3について、図8を参照して説明する。図8は本発明の実施の形態3にかかるベルトコンベヤの駆動部分を拡大して示す左側面図である。なお、本実施の形態3にかかるベルトコンベヤの構成の大部分は実施の形態1,2と同様なので、同一の部材には同一の符号を付して説明を省略する。
【0084】
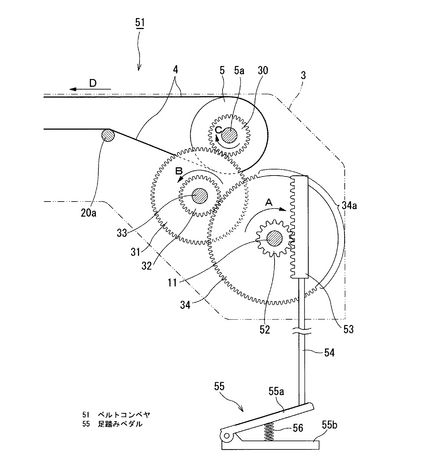
図8に示されるように、本実施の形態3にかかるベルトコンベヤ51においては、上記実施の形態1,2と異なり、手ではなく足の力で入力軸11を回動させる。即ち、入力軸11に入力レバー12を固定する代わりにピニオンギヤ52を一体に回動するように固定し、このピニオンギヤ52に噛み合うラックギヤ53を垂直方向に移動可能に取付ける。ラックギヤ53の下端には床面近傍まで届く長尺の伝達シャフト54が垂直に固定され、伝達シャフト54の下端は床面に設置された足踏みペダル55の踏み板55aに回動可能に取付けられている。
【0085】
足踏みペダル55の踏み板55aと底板55bの間には戻りバネ56が取付けられており、踏み板55aに力が加えられていないときには、ラックギヤ53、ピニオンギヤ52、ひいては歯車34が図8に示される原位置に戻るように保持している。この状態から作業者が足で踏み板55aを踏み込むと、伝達シャフト54と一体にラックギヤ53が垂直に下降して、ピニオンギヤ52を矢印A方向に回動させる。これによって、入力軸11と歯車34も一体に回動して、回転軸33を矢印B方向に、駆動軸5aを矢印C方向に回転させて、駆動軸5aに取付けられている第2のプーリー9を回転させることによってワイヤ8を巻き取り、コイルばね16を圧縮して行く。
【0086】
ここで、本実施の形態3においては、ラックギヤ53が約10cm下降すると入力軸11が約150度回動するように設定されているので、作業者が踏み板55aを約10cm踏み込むと、歯車34と歯車32の噛み合い位置に歯車34の歯のない部分34aの一端が到達して歯車32が空回りする状態になるため、コイルばね16が弛緩して駆動軸5aも回転軸33も矢印と逆方向に回転し、駆動軸5aと一体に駆動ローラ5も回転して搬送ベルト4を矢印D方向に送り出して走行させる。作業者が踏み板55aを約10cmの範囲内で踏んで踏む力を緩めると、戻りバネ56の反発力で踏み板55aが少し戻ってラックギヤ53を少し上昇させ、入力軸11、回転軸33、駆動軸5aをいずれも矢印と逆方向に回転させて、搬送ベルト4を寸動送りすることもできる。
【0087】
このようにして、本実施の形態3にかかるベルトコンベヤ51においては、必要なときだけ人力でコイルばね16を圧縮して、コイルばね16に蓄えられた弾性力を有効に用いてより安全に搬送ベルト4を走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができる。さらに、作業者の両手が自由になるので、ベルトコンベヤ51を駆動させながら他の作業を同時に行うこともできる。
【0088】
実施の形態4
次に、本発明の実施の形態4について、図9を参照して説明する。図9は本発明の実施の形態4にかかるベルトコンベヤの駆動部分を拡大して示す左側面図である。なお、本実施の形態4にかかるベルトコンベヤの構成の大部分は実施の形態1〜3と同様なので、同一の部材には同一の符号を付して説明を省略する。
【0089】
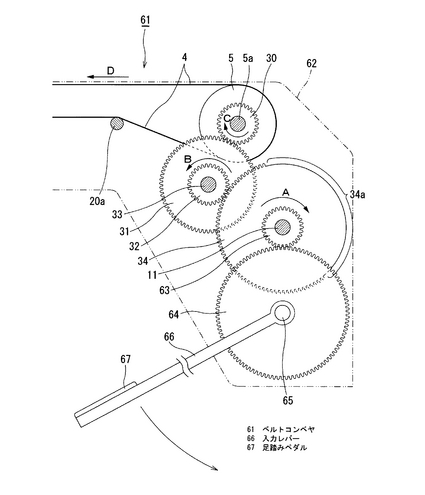
図9に示されるように、本実施の形態4にかかるベルトコンベヤ61においても、手ではなく足の力で入力軸11を回動させるが、上記実施の形態3と異なり、入力レバー66の先端に足踏みペダル67が取付けられている。
【0090】
ここで、足で踏むことによって入力レバー66を約150度回動させることはまず不可能なので、入力軸11に歯数が30の小径の歯車63を固定して、この歯車63に第2の入力軸65に固定された歯数が100の大径の歯車64を噛み合わせ、第2の入力軸65に入力レバー66を固定することによって、入力レバー66を約45度回動させれば入力軸11が約150度回動するように構成している。したがって、回転数増大伝達機構が大きくなった分だけ、第3のフレーム62も大きくなっている。
【0091】
かかる構成を有するベルトコンベヤ61において、作業者が足で足踏みペダル67を踏み込むと、入力レバー66が矢印の方向に回動して、第2の入力軸65及び歯車64も一体に回動し、噛み合っている歯車63を矢印A方向に回動させる。これによって、入力軸11と歯車34も一体に回動して、回転軸33を矢印B方向に、駆動軸5aを矢印C方向に回転させて、駆動軸5aに取付けられている第2のプーリー9を回転させることによってワイヤ8を巻き取り、コイルばね16を圧縮して行く。
【0092】
作業者が足踏みペダル67を約45度回動させると、歯車34と歯車32の噛み合い位置に歯車34の歯のない部分34aの一端が到達して歯車32が空回りする状態になるため、コイルばね16が弛緩して駆動軸5aも回転軸33も矢印と逆方向に回転し、駆動軸5aと一体に駆動ローラ5も回転して搬送ベルト4を矢印D方向に送り出して走行させる。
【0093】
このようにして、本実施の形態4にかかるベルトコンベヤ61においては、必要なときだけ人力でコイルばね16を圧縮して、コイルばね16に蓄えられた弾性力を有効に用いてより安全に搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができる。さらに、作業者の両手が自由になるので、ベルトコンベヤ61を駆動させながら他の作業を同時に行うこともできる。
【0094】
上記実施の形態1においては、歯車34をFRP(繊維強化プラスティック)で作製した例について説明したが、通常の歯車鋼を用いて作製しても良い。また、逆に他の歯車30,31,32についてもFRPで作製することもできる。上記実施の形態2においても、歯車30,31,32,47をFRPで作製しても良い。これによって、回転数増大伝達機構が軽くなり、支持脚21に掛かる荷重が減少するという効果が得られる。
【0095】
また、上記各実施の形態においては、伸縮エネルギー蓄積機構として、コイルばね16を中心とした機構を採用しているが、これに限られるものではなく、板ばねを用いたものや、縮めた状態でストッパーを掛けたエアシリンダにエアポンプで圧縮空気を送り込むもの、エアシリンダを入力レバーで圧縮または膨張させるもの、コイルばねまたはエアシリンダにピニオンロッドを取付け、直接プーリーとの噛み合わせで回転させるもの等を用いることができる。
【0096】
本発明を実施するに際しては、ベルトコンベヤのその他の部分の構成、形状、数量、材質、大きさ、接続関係等についても、上記各実施の形態に限定されるものではない。
【0097】
なお、本発明を実施する場合には、搬送ベルト4側を拘束しておき、コイルばね16の圧縮限界の範囲内で圧縮し、所定のボタン操作によって搬送ベルト4側の拘束を解き、コイルばね16のエネルギーを一気に放出するように機構を配設することもできる。
【0098】
特に、本発明を実施する場合、エアシリンダにエアポンプで圧縮空気を送り込むもののように、エネルギーの蓄積を使用しない間に行い、必要なときに、それを一気に出力させるものでは、使用時に人力で駆動することの認識を薄らぐことになる。また、エアボンベに圧縮空気を蓄積させることもできる。
【産業上の利用可能性】
【0099】
本発明の実施の形態にかかるベルトコンベヤは、搬送ベルトを走行させる駆動ローラが取付けられた駆動軸と入力レバーの一端が固定された入力軸との間に回転数増大伝達機構が設けられているため、入力レバーの他端を持って所定方向に回動させると入力軸の回動が何回転にもなって駆動軸に伝達され、駆動軸に取付けられた第2のプーリーを介してコイルばねが圧縮される。そこで手を離せば、コイルばねが弛緩するとともに蓄えられていた弾性力によって駆動軸が回転し、駆動ローラも一体に回転して搬送ベルトを走行させる。そして、搬送ベルトの走行距離は入力レバーを回動させる角度と駆動軸の回転数の関係を予め調べておけば、自在に調節することができる。これによって、電力を用いずに必要なときに必要なだけ搬送ベルトを走行させることができ、コイルばねの圧縮限界の範囲内で入力レバーを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルトを微小距離ずつ送ること(寸動送り)も容易である。このようにして、必要なときだけ手動でコイルばねを圧縮させて搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができる。
【0100】
したがって、電気を使用していないことから、水周りの作業場、例えば、調理室、炎天下の農作業場、コンベヤが水中に入る水槽への搬入または水槽からの搬出、工場爆発・火災の恐れがある塗装工場、有機溶剤を使用する洗浄工程・薬品工場、モータ回転による静電気が発生し埃が製品に付着するクリーンルーム、モータによる発熱を嫌う温調恒温室、油・グリス油の洩れを嫌う食品工場に使用できる。調理室においては、調理室と配膳室との間の受け渡しにも、絶縁変圧器等の絶縁性を高める防水構造の配線が不要となるから、コンベヤが廉価となる。
【0101】
また、駆動しないときには、全くエネルギーを使用していないから、常に連続運転する従来のベルトコンベヤと相違するので、省エネ効果がある。
【0102】
そして、薬局等の調合室と受け渡し場所間の搬送、クリーンルームと外部との受け渡し、野菜・果物の選果場での選果作業と選果後の搬送、勿論、部品組立工場の人海作業からメインコンベヤへの受け渡し、グループ単位の部品等の組み立てと搬送、函詰単位の搬送、機械のレイアウトを頻繁に行う組立工場、小荷物の分別・配送等を行う配送センター、地震・台風等の災害発生時における現地での食料品・荷物の配送等に使用することができる。
【図面の簡単な説明】
【0103】
【図1】図1は本発明の実施の形態1にかかるベルトコンベヤの全体構成を第3のフレームの手前側フレーム板を外し、かつ中間部分を省略して示す側面図である。
【図2】図2は本発明の実施の形態1にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図である。
【図3】図3(a)は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を示す平面図、(b)は側面図である。
【図4】図4は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構を示す縦断面図である。
【図5】図5は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構を示す左側面図である。
【図6】図6は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構の一部を拡大して示す左側面図である。
【図7】図7は本発明の実施の形態2にかかるベルトコンベヤの駆動部分の構成を示す縦断面図である。
【図8】図8は本発明の実施の形態3にかかるベルトコンベヤの駆動部分を拡大して示す左側面図である。
【図9】図9は本発明の実施の形態4にかかるベルトコンベヤの駆動部分を拡大して示す左側面図である。
【符号の説明】
【0104】
1,41,51,61 ベルトコンベヤ
2 第2のフレーム
3 第3のフレーム
4 搬送ベルト
5 駆動ローラ
5a 駆動軸
6 従動ローラ
7 第1のプーリー
8 ワイヤ
9 第2のプーリー
10 回転数増大伝達機構
11 入力軸
12,66 入力レバー
13 フランジ付きガイド
13a フランジ
14 長いロッド
15 ばねホルダ
16 コイルばね
21 支持脚
25 支持部材
34a 歯がない部分
35,36 ワンウェイクラッチ
40 重り
44 クラッチ機構
45 回転式ハンドル
55,67 足踏みペダル
【技術分野】
【0001】
本発明は、必要なときだけ伸縮エネルギー蓄積機構にエネルギーを蓄積して人力でそのエネルギーを開放してワイヤを巻き取ることによって搬送ベルトを走行させることができる省エネルギータイプのベルトコンベヤに関するものである。
【背景技術】
【0002】
従来のベルトコンベヤは、一般に無端状の搬送ベルトを備え、この搬送ベルトは電動モータ或いは空気圧モータによって回転される駆動ローラによって走行させられ、搬送ベルトの上面に載置されたワークを搬送するものである。
【0003】
例えば、特許文献1に開示された特許発明にかかるベルトコンベヤにおいては、搬送ベルトの損傷を小さくする工夫がなされているが、モータを内蔵した駆動ローラや減速機付きモータに接続された駆動ローラ等によって搬送ベルトを駆動している。
【特許文献1】特許第3058637号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に開示されたベルトコンベヤを始めとする従来のベルトコンベヤは、いずれも電動モータ或いは空気圧モータ等によって駆動されるものであるから、結局は電力を必要とする。特に、大きな工場等では24時間ベルトコンベヤを稼動し続ける場合も多く、ワークを搬送しない場合でもベルトコンベヤだけが稼動している場合もあることから多大な電気エネルギーの浪費となる。また、ベルトコンベヤを好みの距離だけ走行させたり、ベルトコンベヤ上のワークを好みの位置まで搬送したり、さらにはベルトコンベヤを微小距離送るといった細かい制御は、従来の電動モータ・空気圧モータ等による駆動システムでは制御系が著しく複雑になり、多大な費用がかかるという問題点があった。
【0005】
そこで、本発明は、必要なときだけ伸縮エネルギー蓄積機構にエネルギーを蓄積して人力でそのエネルギーを開放することによって搬送ベルトを走行させることができ、電力を殆ど或いは一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御を容易に行うことができるベルトコンベヤを提供することを課題とするものである。
【課題を解決するための手段】
【0006】
請求項1の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、前記1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、人的エネルギーが前記伸縮エネルギー蓄積機構に加えられると、前記伸縮エネルギー蓄積機構に蓄積されたエネルギーによって長さ方向の伸縮が変化し、前記駆動ローラを特定方向のみ機械的に回転させる回転自在なプーリーとを具備するものである。
【0007】
請求項2の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、前記1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、前記伸縮エネルギー蓄積機構に蓄積されたエネルギーが放出されるときにスライドする回転自在な第1のプーリーと、一端を前記駆動軸の近傍の前記1対のフレームに設けられた止め具に固定され、他端を前記第1のプーリーに掛けてから前記駆動軸に一体に回転自在に固定された第2のプーリーに固定されて該第2のプーリーに巻き付けられたワイヤと、前記1対のフレームに前記駆動軸と離して軸支された入力軸と、前記入力軸と前記駆動軸の間に設けられた前記入力軸の回転を前記駆動軸に回転数を増大して伝達する回転数増大伝達機構と、前記入力軸にその一端が固定された入力レバーとを具備するものである。
【0008】
請求項3の発明にかかるベルトコンベヤは、請求項1または請求項2の構成において、前記伸縮エネルギー蓄積機構は、前記1対のフレームに前記搬送ベルトと平行に固定されたフランジ付きガイドと、前記フランジ付きガイドに嵌合して前記搬送ベルトと平行方向にスライドする長いロッドと、前記長いロッドの前記従動ローラよりに固定されたばねホルダと前記フランジ付きガイドのフランジとの間に前記長いロッドを取り巻いて取付けられたコイルばねとを具備するものである。
【0009】
請求項4の発明にかかるベルトコンベヤは、請求項1乃至請求項3のいずれか1つの構成において、前記駆動ローラは前記駆動軸が回転して前記伸縮エネルギー蓄積機構がエネルギーを蓄積するときには回転せず、前記駆動軸が回転して前記伸縮エネルギー蓄積機構が蓄積されたエネルギーを放出するときには回転するように、ワンウェイクラッチを介して前記駆動軸に取付けられているものである。
【0010】
請求項5の発明にかかるベルトコンベヤは、請求項3または請求項4の構成において、前記回転数増大伝達機構は前記入力軸及び前記駆動軸に固定された歯車を含む複数の歯車とその回転軸の組み合わせからなり、前記入力軸に固定された歯車には、前記入力レバーが回動されることによって前記コイルばねが充分圧縮された位置において該歯車に係合している歯車から係合が外れるように歯がない部分が設けられているものである。
【0011】
請求項6の発明にかかるベルトコンベヤは、請求項5の構成において、前記入力軸に固定された歯車に係合する歯車の全ての歯は、前記入力軸に固定された歯車の歯がない部分に隣接された端部の歯が再び前記歯車と係合するときに回転して描く歯先の軌跡に相当する部分が削り落とされているものである。
【0012】
請求項7の発明にかかるベルトコンベヤは、請求項3乃至請求項6のいずれか1つの構成において、前記回転数増大伝達機構を構成する複数の歯車のうち前記入力軸及び前記駆動軸に固定された歯車以外の1つ以上の歯車が、その歯車の回転軸が前記コイルばねが圧縮される方向に回転するときには一体に回転し、前記駆動軸が前記コイルばねが弛緩する方向に回転するときには回転力を伝達しないように、ワンウェイクラッチを介して前記回転軸に取付けられているものである。
【0013】
請求項8の発明にかかるベルトコンベヤは、請求項1乃至請求項7のいずれか1つの構成において、前記駆動ローラの内部には前記駆動ローラの慣性を増すために全周に亘って重りが取付けられているものである。
【0014】
請求項9の発明にかかるベルトコンベヤは、請求項1乃至請求項8のいずれか1つの構成において、前記支持部材及び/または前記1対のフレームのいずれか一方または両方には前記搬送ベルトを必要な高さに支持するための複数の支持脚が取付けられているものである。
【0015】
請求項10の発明にかかるベルトコンベヤは、請求項2乃至請求項9のいずれか1つの構成において、前記入力レバーの代わりに前記入力軸の一端に回転式ハンドルを取付けたものである。
【0016】
請求項11の発明にかかるベルトコンベヤは、請求項10の構成において、前記入力軸と前記回転式ハンドルとの間にクラッチ機構を設けたものである。
【0017】
請求項12の発明にかかるベルトコンベヤは、請求項2乃至請求項9のいずれか1つの構成において、前記入力レバーの代わりにまたは前記入力レバーの先端に前記入力軸に回動力を伝達する足踏みペダルを設けたものである。
【発明の効果】
【0018】
請求項1の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、駆動ローラと従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、駆動ローラと従動ローラの間において、搬送ベルトの下方向への移動を制限し、搬送ベルトの裏面を支持する支持部材と、長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、人的エネルギーが伸縮エネルギー蓄積機構に加えられると、伸縮エネルギー蓄積機構に蓄積されたエネルギーによって長さ方向の伸縮変化が変位し、駆動ローラを特定方向のみ機械的に回転させる回転自在なプーリーとを具備するものである。
【0019】
ここで、伸縮エネルギー蓄積機構としては、スライド機構の中にコイルばねまたは板ばねを組み込んだもの、弾性ゴムを組み込んだもの、縮めた状態でストッパーを掛けたエアシリンダにエアポンプで圧縮空気を送り込むもの、エアシリンダを入力レバーで圧縮または膨張させるもの、コイルばねまたはエアシリンダにピニオンロッドを取付け、直接プーリーとの噛み合わせで回転させるもの等を用いることができる。
【0020】
これによって、人的エネルギーが伸縮エネルギー蓄積機構に加えられると、伸縮エネルギー蓄積機構に蓄積されたエネルギーによって長さ方向の伸縮変化が変位し、プーリーの回転を介して駆動ローラを特定方向のみ機械的に回転させるため、駆動ローラに掛けられた搬送ベルトが所定の方向へ走行する。
【0021】
このようにして、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0022】
請求項2の発明にかかるベルトコンベヤにおいては、搬送ベルトを走行させる駆動ローラが取付けられた駆動軸と入力レバーの一端が固定された入力軸との間に回転数増大伝達機構が設けられているため、入力レバーの他端を持って所定方向に回動させると入力軸の回動が何回転にもなって駆動軸に伝達され、駆動軸に一体に取付けられた第2のプーリーが回転してワイヤが巻き取られる。これによって、ワイヤが掛けられた第1のプーリーが第2のプーリー側に引張られ、この状態において伸縮エネルギー蓄積機構にエネルギーが蓄積される。
【0023】
そこで、人力でストッパー等を開放すれば、伸縮エネルギー蓄積機構に蓄えられていたエネルギーによって第2のプーリーと一体に駆動軸が回転し、駆動ローラも一体に回転して搬送ベルトを走行させる。そして、搬送ベルトの走行距離は伸縮エネルギー蓄積機構に蓄積されるエネルギーと駆動軸の回転数の関係を予め調べておけば、自在に調節することができる。
【0024】
このようにして、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0025】
請求項3の発明にかかるベルトコンベヤにおいては、搬送ベルトを走行させる駆動ローラが取付けられた駆動軸と入力レバーの一端が固定された入力軸との間に回転数増大伝達機構が設けられているため、入力レバーの他端を持って所定方向に回動させると入力軸の回動が何回転にもなって駆動軸に伝達され、駆動軸に一体に取付けられた第2のプーリーが回転してワイヤが巻き取られる。これによって、ワイヤが掛けられた第1のプーリーが第2のプーリー側に引張られるため、長いロッドも一体にスライドしてばねホルダがフランジ付きガイドのフランジに接近してコイルばねが圧縮される。そこで手を離せば、コイルばねが反発して伸びるとともに蓄えられていた弾性力によって第2のプーリーと一体に駆動軸が回転し、駆動ローラも一体に回転して搬送ベルトを走行させる。そして、搬送ベルトの走行距離は入力レバーを回動させる角度と駆動軸の回転数の関係を予め調べておけば、自在に調節することができる。
【0026】
これによって、電力を一切用いずに必要なときに必要なだけ搬送ベルトを走行させることができる。また、コイルばねの圧縮限界の範囲内で入力レバーを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルトを微小距離ずつ送ること(寸動送り)も容易である。
【0027】
このようにして、必要なときだけ手動でコイルばねを圧縮して搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0028】
請求項4の発明にかかるベルトコンベヤは、駆動ローラは駆動軸が回転して伸縮エネルギー蓄積機構がエネルギーを蓄積するときには回転せず、駆動軸が回転して伸縮エネルギー蓄積機構が蓄積されたエネルギーを放出するときには回転するように、ワンウェイクラッチを介して駆動軸に取付けられている。したがって、例えば請求項3にかかるベルトコンベヤにおいて、入力レバーを所定方向に所定角度回動させてコイルばねを圧縮するときには駆動ローラは回転しないので、搬送ベルトを逆方向に走行させることもなく、余分な力を必要とせず軽い力で入力レバーを回動させてコイルばねを圧縮することができる。
【0029】
そして、入力レバーから手を離してコイルばねが弛緩する方向に駆動軸が回転するときには、ワンウェイクラッチが噛み合って駆動ローラも駆動軸と一体に回転するので、搬送ベルトも所定方向に走行する。コイルばねの圧縮限界の範囲内で入力レバーを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルトを微小距離ずつ送ること(寸動送り)も容易である。
【0030】
このようにして、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0031】
請求項5の発明にかかるベルトコンベヤは、回転数増大伝達機構が入力軸及び駆動軸に固定された歯車を含む複数の歯車とその回転軸の組み合わせからなり、入力軸に固定された歯車には、入力レバーが回動されることによってコイルばねが充分圧縮された位置において該歯車に係合している歯車から係合が外れるように歯がない部分が設けられている。したがって、コイルばねが充分圧縮された時点で、入力軸に固定された歯車に係合している歯車は空回りする状態になるので、コイルばねが弛緩して駆動ローラが回転し搬送ベルトを走行させる。
【0032】
これによって、回転数増大伝達機構を構成する歯車と回転軸のうち、入力軸に固定された歯車と入力軸には回転力が伝達されないので入力レバーも元の位置に戻らず、コイルばねに蓄えられた弾性力が入力レバーを元の位置に回動させるために用いられることがなく、弾性力が余分な力に浪費されることなく有効に使われる。また、入力レバーが元の位置に回動するときに作業者に当ったりする危険も確実に回避される。さらに、入力レバーを所定の角度を越えて回動させることによってコイルばねが圧縮され過ぎて破損してしまう事態も確実に回避することができる。歯車が空転しない範囲内で入力レバーを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルトを微小距離ずつ送ること(寸動送り)も容易である。
【0033】
このようにして、必要なときだけ手動でコイルばねを圧縮して、かつコイルばねを圧縮し過ぎて破損させる恐れもなく、コイルばねに蓄えられた弾性力を有効に用いて搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0034】
請求項6の発明にかかるベルトコンベヤにおいては、入力軸に固定された歯車に係合する歯車の全ての歯は、入力軸に固定された歯車の歯がない部分に隣接された端部の歯が再び前記歯車と係合するときに回転して描く歯先の軌跡に相当する部分が削り落とされている。入力軸に固定された歯車の歯がない部分が係合する歯車との噛み合い部分に到達することによって、係合する歯車が空回りしてコイルばねが弛緩して駆動ローラが回転し搬送ベルトを走行させる。そして、また搬送ベルトを走行させるためには、入力軸に固定された歯車の歯のある部分を係合する歯車に再び噛み合わせて入力レバーを元の位置に回動させ、そこから入力レバーを回動させて再度コイルばねを圧縮する必要がある。
【0035】
しかしながら、入力軸に固定された歯車の歯がない部分に隣接された端部の歯が、必ずしも係合する歯車の歯と再度うまく噛み合うとは限らず、場合によっては両歯車の歯の頂部同士が衝突して噛み合わないという事態も生ずる。そこで、端部の歯が100%係合する歯車の歯と噛み合うように、端部の歯が回転して描く歯先の軌跡に相当する部分を、係合する歯車の全ての歯について削り落とした。これによって、両歯車の歯の頂部同士が衝突する位置に来たときでも、係合する歯車の歯先は削り落とされているので、端部の歯は衝突することなくすり抜けて次の歯の削られていない側に当接して、両歯車がうまく噛み合う。
【0036】
このようにして、歯がない部分を有する歯車とこれと係合する歯車とを常に確実に噛み合わせることができ、必要なときだけ手動でコイルばねを圧縮して、かつコイルばねを圧縮し過ぎて破損させる恐れもなく、コイルばねに蓄えられた弾性力を有効に用いて搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0037】
請求項7の発明にかかるベルトコンベヤは、回転数増大伝達機構を構成する複数の歯車のうち入力軸及び駆動軸に固定された歯車以外の1つ以上の歯車がワンウェイクラッチを介して回転軸に取付けられており、その回転軸がコイルばねが圧縮される方向に回転するときには一体に回転し、駆動軸がコイルばねが弛緩する方向に回転するときには回転力を伝達しないようになっている。
【0038】
したがって、入力レバーを回動させてコイルばねを圧縮するときには回転数を増大しながら回転力を伝達し、コイルばねが弛緩して駆動ローラが回転し搬送ベルトを走行させるときには回転軸と歯車のいずれかが空転して、入力軸及び入力レバーまで回転力を伝達しないので、回転数増大伝達機構を構成する複数の歯車の全てと入力軸及び入力レバーを回転させるのにコイルばねに蓄えられた弾性力を無駄に使うことなく、駆動軸とその近傍の歯車を回転させるだけで後は全て駆動ローラを回転させるのに用いられるので、搬送ベルトを効率良く走行させることができる。
【0039】
また、入力レバーを少し回動させて戻す動作を繰り返すことによって、寸動送りを繰り返して搬送ベルト上のワークの位置を微調整することもできる。
【0040】
このようにして、必要なときだけ手動でコイルばねを圧縮して、コイルばねに蓄えられた弾性力を有効に用いて搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができるベルトコンベヤとなる。
【0041】
請求項8の発明にかかるベルトコンベヤは、駆動ローラの内部に駆動ローラの慣性を増すために全周に亘って重りが取付けられている。これによって、伸縮エネルギー蓄積機構に蓄積されたエネルギーが開放されて駆動ローラが回転すると、慣性力によって駆動ローラが蓄積されたエネルギーによる回転数の数倍回転して、搬送ベルトをより長距離走行させることができる。
【0042】
このようにして、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0043】
請求項9の発明にかかるベルトコンベヤは、支持部材及び/または1対のフレームのいずれか一方または両方には搬送ベルトを必要な高さに支持するための複数の支持脚が取付けられている。ある程度の高さまでは、1対のフレームを高く作製することによって搬送ベルトを必要な高さに支持できるが、それにも限界があり、特に従動ローラと従動軸が取付けられるだけの第2のフレーム側においては、フレーム材料の無駄遣いとなる。そこで、搬送ベルトを支えるために1対のフレーム間に架け渡されている支持部材等に必要な高さの支持脚を取付けることによって、搬送ベルトを必要な高さに支持することができる。
【0044】
ここで、搬送ベルトは略水平に支持されるとは限らず、必要に応じて斜めに、即ち従動ローラ側が高くまたは従動ローラ側が低く支持される。また、支持部材に支持脚を取付ける場合には、支持部材の幅が搬送ベルトの幅より広く支持部材の両側面が搬送ベルトから突出している場合は、支持部材の両側面に直接複数の支持脚を取付けることができるが、支持部材の幅が搬送ベルトの幅より狭く支持部材の両側面が搬送ベルトより引っ込んでいる場合は、支持部材の両側面に支持脚の数だけの中継ぎ部材を搬送ベルトから突出するように取付けて、この中継ぎ部材に支持脚を取付ける必要がある。
【0045】
このようにして、必要な高さに搬送ベルトが支持されて、必要なときだけ手動で伸縮エネルギー蓄積機構に蓄積されたエネルギーを開放して搬送ベルトを走行させることができ、電力を殆どまたは一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0046】
請求項10の発明にかかるベルトコンベヤは、入力レバーの代わりに入力軸の一端に回転式ハンドルを取付けたものである。入力軸と駆動軸の間に設けられている回転数増大伝達機構によって、入力軸を半回転程度回動させただけで駆動軸は何回転もしてコイルばねまたは板ばねを一気に圧縮することができるが、その反面入力軸を回動させるための力は駆動軸を直接回転させるのに必要な力の何倍にもなる。
【0047】
そこで、ある程度の長さを有する入力レバーを入力軸に固定することによって、てこの原理で入力軸を楽に回動させることができるが、それに替えて回転式ハンドルを用いるとハンドルの径は小さいので、入力軸を回動させるためにはより大きな力を必要とする。その代わりに、スペースの節約になり、また請求項2及び請求項3の発明にかかるベルトコンベヤのように搬送ベルトが走行するときに入力軸まで回転力が戻ってくる形式のものでは、長い入力レバーが元の位置に回動するよりも小径の回転式ハンドルが回動する方が作業者にとってより安全である。
【0048】
このようにして、必要なときだけ人力でコイルばねを圧縮して、コイルばねに蓄えられた弾性力を有効に用いてより安全に搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0049】
請求項11の発明にかかるベルトコンベヤは、入力軸と回転式ハンドルとの間にクラッチ機構を設けたものである。これによって、回転式ハンドルを所定方向に所定角度回動させて回転数増大伝達機構を介してコイルばねを圧縮したら、クラッチ機構によって入力軸と回転式ハンドルとの接続を解放すれば、入力軸と回転数増大伝達機構を介してコイルばねが弛緩して駆動ローラが回転し、搬送ベルトが走行する。このとき、回転式ハンドルは回転しないので、請求項2及び請求項3の発明にかかるベルトコンベヤのように搬送ベルトが走行するときに入力軸まで回転力が戻ってくる形式のものでもより安全である。
【0050】
このようにして、必要なときだけ手動でコイルばねを圧縮して、コイルばねに蓄えられた弾性力を有効に用いてより安全に搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【0051】
請求項12の発明にかかるベルトコンベヤは、入力レバーの代わりにまたは入力レバーの先端に入力軸に回動力を伝達する足踏みペダルを設けたものである。これによって、足踏みペダルを足で操作して、入力軸を所定方向に所定角度回動させることができ、コイルばねを圧縮して搬送ベルトを走行させることができる。また、足踏みペダルを踏み込んだ足を少しずつ戻すことによって、搬送ベルトを寸動送りすることも容易である。さらに、作業者の両手が自由になるので、ベルトコンベヤを駆動させながら他の作業を同時に行うこともできる。
【0052】
このようにして、必要なときだけ人力でコイルばねを圧縮して、コイルばねに蓄えられた弾性力を有効に用いてより安全に搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるベルトコンベヤとなる。
【発明を実施するための最良の形態】
【0053】
以下、本発明の実施の形態について、図面を参照しつつ説明する。
【0054】
実施の形態1
まず、本発明の実施の形態1について、図1乃至図6を参照して説明する。
【0055】
図1は本発明の実施の形態1にかかるベルトコンベヤの全体構成を第3のフレームの手前側フレーム板を外し、かつ中間部分を省略して示す側面図である。図2は本発明の実施の形態1にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図である。図3(a)は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を示す平面図、(b)は側面図である。図4は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構を示す縦断面図である。図5は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構を示す左側面図である。図6は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構の一部を拡大して示す左側面図である。
【0056】
図1に示されるように、本実施の形態1にかかるベルトコンベヤ1は、支持部材を間に挟んで組付けた第2のフレームとしての従動側フレーム2と、それと離間対向した、第3のフレーム3と中間のフレーム板を共用する第1のフレームとしての図示されない駆動側フレームと、駆動側フレームに軸支された駆動軸5aに一体回転可能に取付けられた駆動ローラ5と、従動側フレーム2に軸支された従動軸に一体回転可能に取付けられた従動ローラ6と、駆動ローラ5と従動ローラ6に掛け渡された無端状の走行可能な搬送ベルト4を中心として構成されている。
【0057】
さらに、これら1対の図示されない駆動側フレームと従動側フレーム2に両端を固定された支持部材としての図示されないアルミニウム板には、搬送ベルト4の両側面をカバーするように両側面に突出した断面コの字形のパネル20が、図示されない駆動側フレームと従動側フレーム2の間に亘ってネジ止めされており、コの字形パネル20の底面左端に1本と第3のフレーム3の右端に2本(1本は重なって見えない)、搬送ベルト4を必要な高さに支持するための支持脚21が取付けられている。安定を保つために、これら3本の支持脚21の下端には紙面に垂直方向に伸びるコの字形部材22がそれぞれ固定され、コの字形部材22の手前側と向う側にはそれぞれ支持底23が固定されている。
【0058】
第3のフレーム3の中間フレーム板にはフランジ付きガイド13が搬送ベルト4と平行に固定され、フランジ付きガイド13には長いロッド14が嵌合して搬送ベルト4と平行方向にガタツキなくスライドする。この長いロッド14の左端にはばねホルダ15が固定されており、フランジ付きガイド13のフランジ13aとばねホルダ15の間には、コイルばね16が長いロッド14を取り巻いて取付けられている。一方、長いロッド14の右端には第1のプーリー7が回転自在に取付けられ、第3のフレーム3の中間フレーム板3Bには丈夫でかつ柔軟なワイヤ8の一端が固定され、第1のプーリー7に掛けられてから、第3のフレーム3内に突出した駆動軸5aに一体回転自在に固定された第2のプーリー9に巻き付けられて、この第2のプーリー9にワイヤ8の他端が固定されている。
【0059】
さらに、第3のフレーム3の右端には、入力軸11が駆動軸5aと離して駆動軸5aと同じく水平に軸支されており、この入力軸11には入力レバー12が一体に回動可能に固定されている。そして、入力軸11と駆動軸5aとの間には、入力軸11の回転を駆動軸5aに回転数を増大して伝達する回転数増大伝達機構10が設けられている。
【0060】
次に、図2の平面図を参照して、本実施の形態1にかかるベルトコンベヤ1についてさらに説明する。図2に示されるように、第3のフレーム3の中間フレーム板3Bの向う側には、中間フレーム板3Bとの間で駆動軸5aを水平に軸支する第1のフレームの外側フレーム板3Aが設けられており、駆動軸5aには駆動ローラ5が一体回転可能に取付けられている。第1のフレーム(外側フレーム板3Aと中間フレーム板3Bの一部とからなる)とこれに離間対向して設けられた第2のフレーム2との間には、搬送ベルト4の上側を支持するための支持部材としてのアルミニウム板25が架け渡されて、第1のフレームと第2のフレーム2にそれぞれ固定されている。
【0061】
そして、駆動ローラ5と従動ローラ6には無端状の搬送ベルト4が張った状態で掛け渡されており、後述するように入力レバー12を操作することによって、白い矢印の方向へ高速で移動して製品等を搬送する。また、前述の如く、コの字形パネル20の底面左端には搬送ベルト4を必要な高さに支持するための支持脚21が取付けられている。安定を保つために、この支持脚21の下端にはコの字形部材22が固定され、コの字形部材22の両端にはそれぞれ支持底23が固定されている。第3のフレーム3の右端底面にも、同様の構造の支持脚が2本固定されているが、ここでは図示省略されている。
【0062】
次に、本実施の形態1にかかるベルトコンベヤ1の駆動機構について、図3を参照してさらに説明する。図3(a),(b)に示されるように、フランジ付きガイド13のフランジ13aにはブラケット13bが一体になっており、このブラケット13bにおいて、中間フレーム板3Bに4本のネジでネジ止めされている。また、図3(a)に示されるように、外側フレーム板3Aと中間フレーム板3Bの間には補助ローラ20aが回転自在に軸支されており、この補助ローラ20aは図3(b)に示されるように、搬送ベルト4の張りを一段と良くし、且つ搬送ベルト4の下側を従動ローラ6までの間、搬送ベルト4の上側とほぼ平行にし、見栄えを良くしたものである。
【0063】
また、コイルばね16が実線で示される圧縮された状態から想像線で示される伸びた状態となり、長いロッド14が実線で示される位置から想像線で示される位置まで高速でスライドする際に、ばねホルダ15が第3のフレーム3の左端に衝突する衝撃を緩和するために、ゴム製のストッパー26が設けられている。さらに、この際に第2のプーリー9が高速回転して巻き取られていたワイヤ8が波打って第2のプーリー9から外れるのを防ぐために、第2のプーリー9の近傍にワイヤ抑え9aが固定されている。このワイヤ抑え9aには端面に深い溝が切ってあり、ワイヤ8はこの溝の中を通っている。ワイヤ8の一端はワイヤ止め8aに強固に固定されており、第1のプーリー7に掛けられた後、前記ワイヤ抑え9aの深い溝の中を通って第2のプーリー9に巻き付けられ、ワイヤ8の他端は第2のプーリー9に強固に固定されている。
【0064】
一方、第3のフレーム3内に突出した駆動軸5aに固定されている第2のプーリー9の向こう側には、やはり駆動軸5aと一体に回転する小径の歯車30が固定されており、この歯車30には第3のフレーム3に軸支された回転軸33と一体に回転する大径の歯車31が噛み合っている。この回転軸33には、やはり一体に回転する小径の歯車32が固定されており、この歯車32には約半周分しか歯が設けられていない大径の歯車34が噛み合っており、歯車34は入力軸11に一体回転可能に固定されている。入力軸11が回転することによって、これら歯車34,歯車32,回転軸33,歯車31,歯車30によって、回転数が増大されて駆動軸5aに回転が伝達される。したがって、これら歯車30,歯車31,歯車32,回転軸33及び歯車34は、回転数増大伝達機構10を構成している。
【0065】
この回転数増大伝達機構10について、図4を参照してさらに詳細に説明する。図4に示されるように、第1のフレームを構成する2枚のメッキ鋼板3A,3Bの間には、駆動ローラ5が2枚のメッキ鋼板3A,3Bに2個のボールベアリング軸受け37によって水平に軸支された駆動軸5aに、ワンウェイクラッチ35及びボールベアリング軸受け37を介して、一体回転可能に取付けられている。駆動ローラ5の内部には、慣性を増すために全周に亘って重り40が取付けられており、駆動ローラ5の外周には搬送ベルト4が掛けられている。駆動軸5aの中間フレーム板3Bから突出した部分には、小径の歯車30が一体に固定されており、さらにその外側にはワイヤ8を巻き取る第2のプーリー9が固定されている。歯車30と噛み合う大径の歯車31は、両端をボールベアリング軸受け37で第3のフレーム3に水平に軸支された回転軸33に、ワンウェイクラッチ36を介して取付けられている。
【0066】
この回転軸33の中央よりには小径の歯車32が一体に固定されており、この歯車32と噛み合う大径の歯車34は、両端をボールベアリング軸受け37で第3のフレーム3に水平に軸支された入力軸11に、一体に固定されている。この歯車34には、外周の5分の2程度に亘って歯のない部分34aが設けられている。なお、ボールベアリング軸受け37で軸支された駆動軸5a、回転軸33、入力軸11の必要な箇所には、抜け止めリング38が嵌め込まれている。
【0067】
本実施の形態1にかかるベルトコンベヤ1の歯車34の歯数は、その噛み合いによってコイルばね16に対する蓄積するエネルギーを決定するので、当然、搬送ベルト4の移動距離、即ち、搬送距離が決定される。また、歯車32と歯車34の噛み合いが急激に外れるので、コイルばね16に蓄積したエネルギーを一気に出力をすることができて、高効率である。また、本実施の形態1においては、入力レバー12を図1,図3(b)に想像線で示される原位置から所定角度回動させると、歯車32と歯車34の噛み合わせ位置に歯車34の歯のない部分34aが到達して、歯車32が逆方向に空回りしてコイルばね16が弛緩するので、コイルばね16を圧縮し過ぎて破損する恐れはない。
【0068】
さらに、ワンウェイクラッチ35は、駆動軸5aがコイルばね16を圧縮する方向に回転するときには回転を駆動ローラ5に伝達せず、駆動軸5aがコイルばね16が弛緩する方向に回転するときには駆動ローラ5も一体に回転するように取付けられている。一方、ワンウェイクラッチ36は、回転軸33がコイルばね16を圧縮する方向に回転するときには回転を歯車31に伝達し、歯車31がコイルばね16が弛緩する方向に回転するときには、回転を回転軸33に伝達せず空転するように取付けられている。
【0069】
かかる構成を有するベルトコンベヤ1における搬送ベルト4の走行の仕組みについて、図1乃至図5を参照して説明する。作業者が図4に示される入力レバー12の先端のグリップ部12aを握って、図1において右回り(時計回り)方向に入力レバー12を回動させると、図4に示される回動リング11aを介して入力軸11も回動し、入力軸11に固定された歯車34も一体に回動する。すると、歯車34に噛み合っている歯車32も固定されている回転軸33と一体に回動し、この場合は回転軸33がコイルばね16を圧縮する方向に回動するので、ワンウェイクラッチ36は回動を歯車31に伝達して歯車31も一体に回動する。
【0070】
さらに、歯車31に噛み合っている歯車30も固定されている駆動軸5aと一体に回動し、駆動軸5aに固定されている第2のプーリー9はワイヤ8を巻き取る方向に回転する。これによって、図1に示されるように、想像線で示される原位置にあった第1のプーリー7はワイヤ8が巻き取られるに連れて右側へ引張られるので、長いロッド14も想像線で示される原位置から実線で示される位置までスライドして、弛緩していたコイルばね16も実線で示されるように圧縮される。このとき、図4に示されるワンウェイクラッチ35は回動を駆動ローラ5に伝達しないため搬送ベルト4が逆方向に走行することもなく、軽い力でコイルばね16を圧縮することができる。
【0071】
このようにして、図5に示されるように、歯車34が矢印A方向へ回動するにしたがって、歯車32,31は矢印B方向へ、歯車30及び駆動軸5aは矢印C方向へ回動して、コイルばね16が次第に強く圧縮されて弾性エネルギーが蓄積されて行く。そして、矢印A方向への回動角度が所定角度に達して、歯車34の歯のない部分34aの端が歯車32との噛み合い部分に到達すると噛み合いが外れ、回転軸33及び駆動軸5aはそれぞれコイルばね16が伸びるエネルギーによって各矢印とは逆方向に回転し、駆動ローラ5が左回り(反時計回り)方向に回転して搬送ベルト4を矢印D方向へ走行させる。
【0072】
このとき、図4に示されるワンウェイクラッチ35は駆動軸5aの回転を駆動ローラ5に伝達して回転させ、一方ワンウェイクラッチ36は歯車31の回転を回転軸33に伝達せず歯車31は空転する。したがって、駆動軸5aの回転力は駆動ローラ5を回転させる以外には歯車30,31を回転させるのに浪費されるだけで、コイルばね16に蓄積された弾性エネルギーが効率良く搬送ベルト4を走行させるのに用いられる。さらに、駆動ローラ5内部に重り40が取付けられているために、慣性力によって駆動ローラ5がコイルばね16の弛緩による回転数の数倍回転して、搬送ベルト4をより長距離走行させることができる。
【0073】
ここで、次に搬送ベルト4を走行させるためには、図6に示されるように、入力軸11に固定された歯車34を矢印の方向に回転させることによって、歯車34の歯のある部分を係合する歯車32に再び噛み合わせて入力レバー12を元の位置に回動させ、そこから入力レバー12を回動させて再度コイルばね16を圧縮する必要がある。しかしながら、入力軸11に固定された歯車34の歯がない部分34aに隣接された端部の歯が、必ずしも係合する歯車32の歯と再度うまく噛み合うとは限らず、場合によっては両歯車32,34の歯の頂部同士が衝突して噛み合わないという事態も生ずる。
【0074】
そこで、本実施の形態1においては、図6に示されるように、歯車34の端部の歯が100%係合する歯車32の歯と噛み合うように、歯車34の端部の歯が回転して描く歯先の軌跡に相当する部分32aが、係合する歯車32の全ての歯について削り落とされている。これによって、両歯車32,34の歯の頂部同士が衝突する位置に来たときでも、係合する歯車32の歯先32aは削り落とされているので、歯車34の端部の歯は衝突することなくすり抜けて次の歯の削られていない側に当接して、両歯車32,34が100%うまく噛み合う。
【0075】
このようにして、本実施の形態1にかかるベルトコンベヤ1においては、必要なときだけ手動でコイルばね16を圧縮して、搬送ベルト4を逆方向に走行させることなく、かつ軽い力でコイルばねバネ16を圧縮できて搬送ベルト4を走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、圧縮し過ぎてコイルばね16を破損させる恐れもない。
【0076】
また、図5に示される入力レバー12を小さい角度だけ矢印A方向へ回動させ、逆方向へ任意の角度だけ戻すことによって、搬送ベルト4を少しずつ走行(寸動送り)させることができる。但し、歯車31に設けられているワンウェイクラッチ36の作用によって、入力レバー12を逆方向へ戻して止めても歯車31が空転するため搬送ベルト4はその位置では止まらず、コイルばね16が完全に弛緩して駆動ローラ5の慣性力がなくなるまで走行する。
【0077】
実施の形態2
次に、本発明の実施の形態2について、図7を参照して説明する。図7は本発明の実施の形態2にかかるベルトコンベヤの駆動部分の構成を示す縦断面図である。図7に示されるように、本実施の形態2にかかるベルトコンベヤ41は、主要な部分の構成は実施の形態1のベルトコンベヤ1と同様であるので、同一部分には同一の符号を付して説明を省略する。異なるのは、入力軸11に固定された一部歯のない部分34aを有する歯車34の代わりに全周に歯を有する歯車47が入力軸11に固定されている点と、入力軸11の端にクラッチ機構44を介して入力レバー12の代わりに回転式ハンドル45が設けられている点である。
【0078】
クラッチ機構44は、入力軸11の端に固定された円筒状歯車42と、入力軸11に対して回転自在かつ前進後退可能に軸支された回転式ハンドル45に固定された円筒状歯車43とから構成されている。図7の状態においては、回転式ハンドル45が後退しており、クラッチ機構44は解放されている。この状態から回転式ハンドル45を矢印の方向へ前進させることによって、円筒状歯車42と円筒状歯車43とが噛み合ってクラッチ機構44は係合状態となり、取手46を持って回転式ハンドル45を右回り(時計回り)方向に回動させることによって、入力軸11が回転して実施の形態1と同様にして回転力が駆動軸5aまで伝達され、コイルばね16が圧縮される。
【0079】
ここで、本実施の形態2においては、入力軸11に固定された歯車47が全周に歯を有しており、コイルばね16の圧縮限界まで入力軸11が回動したときに、実施の形態1のように自動的に歯車32が空転してコイルばね16が弛緩するということがないので、コイルばね16の圧縮限界を越えて入力軸11を回動させてコイルばね16が破損する事態を防ぐために、第3のフレーム3の外側フレーム板3Cに回動範囲を明示しておくか、取手46に対するストッパーを設ける等の対策を取る必要がある。
【0080】
クラッチ機構44を係合状態として、取手46を持って回転式ハンドル45を回動範囲内の任意の角度まで回動させたら、回転式ハンドル45を両手で持って回転式ハンドル45及び円筒状歯車43を後退させる。これによって、クラッチ機構44は解放状態となり、入力軸11,歯車47,歯車32,回転軸33,歯車31,歯車30,駆動軸5aがコイルばね16に蓄えられた弾性エネルギーによって逆方向に回転して、ワンウェイクラッチ35の作用によって駆動ローラ5が駆動軸5aと一体に回転して、搬送ベルト4の上面が所定方向(紙面向う側方向)に送り出されて下面が駆動ローラ5に巻き取られ、搬送ベルト4が走行する。
【0081】
このとき、ワンウェイクラッチ36は歯車31の回転を回転軸33に伝達せず、歯車31は空転する。したがって、駆動軸5aの回転力は駆動ローラ5を回転させる以外には歯車30,31を回転させるのに浪費されるだけで、コイルばね16に蓄積された弾性エネルギーが効率良く搬送ベルト4を走行させるのに用いられる。さらに、駆動ローラ5内部に重り40が取付けられているので、慣性力によって駆動ローラ5がコイルばね16の弛緩による回転数の数倍回転して、搬送ベルト4をより長距離走行させることができる。
【0082】
このようにして、本実施の形態2にかかるベルトコンベヤ41においては、必要なときだけ手動でコイルばね16を圧縮して、搬送ベルト4を逆方向に走行させることなく、かつ軽い力でコイルばね16を圧縮して搬送ベルト4を走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、長い入力レバー12の代わりに回転式ハンドル45を用いたため、狭いスペースにも設置することができる。
【0083】
実施の形態3
次に、本発明の実施の形態3について、図8を参照して説明する。図8は本発明の実施の形態3にかかるベルトコンベヤの駆動部分を拡大して示す左側面図である。なお、本実施の形態3にかかるベルトコンベヤの構成の大部分は実施の形態1,2と同様なので、同一の部材には同一の符号を付して説明を省略する。
【0084】
図8に示されるように、本実施の形態3にかかるベルトコンベヤ51においては、上記実施の形態1,2と異なり、手ではなく足の力で入力軸11を回動させる。即ち、入力軸11に入力レバー12を固定する代わりにピニオンギヤ52を一体に回動するように固定し、このピニオンギヤ52に噛み合うラックギヤ53を垂直方向に移動可能に取付ける。ラックギヤ53の下端には床面近傍まで届く長尺の伝達シャフト54が垂直に固定され、伝達シャフト54の下端は床面に設置された足踏みペダル55の踏み板55aに回動可能に取付けられている。
【0085】
足踏みペダル55の踏み板55aと底板55bの間には戻りバネ56が取付けられており、踏み板55aに力が加えられていないときには、ラックギヤ53、ピニオンギヤ52、ひいては歯車34が図8に示される原位置に戻るように保持している。この状態から作業者が足で踏み板55aを踏み込むと、伝達シャフト54と一体にラックギヤ53が垂直に下降して、ピニオンギヤ52を矢印A方向に回動させる。これによって、入力軸11と歯車34も一体に回動して、回転軸33を矢印B方向に、駆動軸5aを矢印C方向に回転させて、駆動軸5aに取付けられている第2のプーリー9を回転させることによってワイヤ8を巻き取り、コイルばね16を圧縮して行く。
【0086】
ここで、本実施の形態3においては、ラックギヤ53が約10cm下降すると入力軸11が約150度回動するように設定されているので、作業者が踏み板55aを約10cm踏み込むと、歯車34と歯車32の噛み合い位置に歯車34の歯のない部分34aの一端が到達して歯車32が空回りする状態になるため、コイルばね16が弛緩して駆動軸5aも回転軸33も矢印と逆方向に回転し、駆動軸5aと一体に駆動ローラ5も回転して搬送ベルト4を矢印D方向に送り出して走行させる。作業者が踏み板55aを約10cmの範囲内で踏んで踏む力を緩めると、戻りバネ56の反発力で踏み板55aが少し戻ってラックギヤ53を少し上昇させ、入力軸11、回転軸33、駆動軸5aをいずれも矢印と逆方向に回転させて、搬送ベルト4を寸動送りすることもできる。
【0087】
このようにして、本実施の形態3にかかるベルトコンベヤ51においては、必要なときだけ人力でコイルばね16を圧縮して、コイルばね16に蓄えられた弾性力を有効に用いてより安全に搬送ベルト4を走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができる。さらに、作業者の両手が自由になるので、ベルトコンベヤ51を駆動させながら他の作業を同時に行うこともできる。
【0088】
実施の形態4
次に、本発明の実施の形態4について、図9を参照して説明する。図9は本発明の実施の形態4にかかるベルトコンベヤの駆動部分を拡大して示す左側面図である。なお、本実施の形態4にかかるベルトコンベヤの構成の大部分は実施の形態1〜3と同様なので、同一の部材には同一の符号を付して説明を省略する。
【0089】
図9に示されるように、本実施の形態4にかかるベルトコンベヤ61においても、手ではなく足の力で入力軸11を回動させるが、上記実施の形態3と異なり、入力レバー66の先端に足踏みペダル67が取付けられている。
【0090】
ここで、足で踏むことによって入力レバー66を約150度回動させることはまず不可能なので、入力軸11に歯数が30の小径の歯車63を固定して、この歯車63に第2の入力軸65に固定された歯数が100の大径の歯車64を噛み合わせ、第2の入力軸65に入力レバー66を固定することによって、入力レバー66を約45度回動させれば入力軸11が約150度回動するように構成している。したがって、回転数増大伝達機構が大きくなった分だけ、第3のフレーム62も大きくなっている。
【0091】
かかる構成を有するベルトコンベヤ61において、作業者が足で足踏みペダル67を踏み込むと、入力レバー66が矢印の方向に回動して、第2の入力軸65及び歯車64も一体に回動し、噛み合っている歯車63を矢印A方向に回動させる。これによって、入力軸11と歯車34も一体に回動して、回転軸33を矢印B方向に、駆動軸5aを矢印C方向に回転させて、駆動軸5aに取付けられている第2のプーリー9を回転させることによってワイヤ8を巻き取り、コイルばね16を圧縮して行く。
【0092】
作業者が足踏みペダル67を約45度回動させると、歯車34と歯車32の噛み合い位置に歯車34の歯のない部分34aの一端が到達して歯車32が空回りする状態になるため、コイルばね16が弛緩して駆動軸5aも回転軸33も矢印と逆方向に回転し、駆動軸5aと一体に駆動ローラ5も回転して搬送ベルト4を矢印D方向に送り出して走行させる。
【0093】
このようにして、本実施の形態4にかかるベルトコンベヤ61においては、必要なときだけ人力でコイルばね16を圧縮して、コイルばね16に蓄えられた弾性力を有効に用いてより安全に搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができる。さらに、作業者の両手が自由になるので、ベルトコンベヤ61を駆動させながら他の作業を同時に行うこともできる。
【0094】
上記実施の形態1においては、歯車34をFRP(繊維強化プラスティック)で作製した例について説明したが、通常の歯車鋼を用いて作製しても良い。また、逆に他の歯車30,31,32についてもFRPで作製することもできる。上記実施の形態2においても、歯車30,31,32,47をFRPで作製しても良い。これによって、回転数増大伝達機構が軽くなり、支持脚21に掛かる荷重が減少するという効果が得られる。
【0095】
また、上記各実施の形態においては、伸縮エネルギー蓄積機構として、コイルばね16を中心とした機構を採用しているが、これに限られるものではなく、板ばねを用いたものや、縮めた状態でストッパーを掛けたエアシリンダにエアポンプで圧縮空気を送り込むもの、エアシリンダを入力レバーで圧縮または膨張させるもの、コイルばねまたはエアシリンダにピニオンロッドを取付け、直接プーリーとの噛み合わせで回転させるもの等を用いることができる。
【0096】
本発明を実施するに際しては、ベルトコンベヤのその他の部分の構成、形状、数量、材質、大きさ、接続関係等についても、上記各実施の形態に限定されるものではない。
【0097】
なお、本発明を実施する場合には、搬送ベルト4側を拘束しておき、コイルばね16の圧縮限界の範囲内で圧縮し、所定のボタン操作によって搬送ベルト4側の拘束を解き、コイルばね16のエネルギーを一気に放出するように機構を配設することもできる。
【0098】
特に、本発明を実施する場合、エアシリンダにエアポンプで圧縮空気を送り込むもののように、エネルギーの蓄積を使用しない間に行い、必要なときに、それを一気に出力させるものでは、使用時に人力で駆動することの認識を薄らぐことになる。また、エアボンベに圧縮空気を蓄積させることもできる。
【産業上の利用可能性】
【0099】
本発明の実施の形態にかかるベルトコンベヤは、搬送ベルトを走行させる駆動ローラが取付けられた駆動軸と入力レバーの一端が固定された入力軸との間に回転数増大伝達機構が設けられているため、入力レバーの他端を持って所定方向に回動させると入力軸の回動が何回転にもなって駆動軸に伝達され、駆動軸に取付けられた第2のプーリーを介してコイルばねが圧縮される。そこで手を離せば、コイルばねが弛緩するとともに蓄えられていた弾性力によって駆動軸が回転し、駆動ローラも一体に回転して搬送ベルトを走行させる。そして、搬送ベルトの走行距離は入力レバーを回動させる角度と駆動軸の回転数の関係を予め調べておけば、自在に調節することができる。これによって、電力を用いずに必要なときに必要なだけ搬送ベルトを走行させることができ、コイルばねの圧縮限界の範囲内で入力レバーを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルトを微小距離ずつ送ること(寸動送り)も容易である。このようにして、必要なときだけ手動でコイルばねを圧縮させて搬送ベルトを走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができる。
【0100】
したがって、電気を使用していないことから、水周りの作業場、例えば、調理室、炎天下の農作業場、コンベヤが水中に入る水槽への搬入または水槽からの搬出、工場爆発・火災の恐れがある塗装工場、有機溶剤を使用する洗浄工程・薬品工場、モータ回転による静電気が発生し埃が製品に付着するクリーンルーム、モータによる発熱を嫌う温調恒温室、油・グリス油の洩れを嫌う食品工場に使用できる。調理室においては、調理室と配膳室との間の受け渡しにも、絶縁変圧器等の絶縁性を高める防水構造の配線が不要となるから、コンベヤが廉価となる。
【0101】
また、駆動しないときには、全くエネルギーを使用していないから、常に連続運転する従来のベルトコンベヤと相違するので、省エネ効果がある。
【0102】
そして、薬局等の調合室と受け渡し場所間の搬送、クリーンルームと外部との受け渡し、野菜・果物の選果場での選果作業と選果後の搬送、勿論、部品組立工場の人海作業からメインコンベヤへの受け渡し、グループ単位の部品等の組み立てと搬送、函詰単位の搬送、機械のレイアウトを頻繁に行う組立工場、小荷物の分別・配送等を行う配送センター、地震・台風等の災害発生時における現地での食料品・荷物の配送等に使用することができる。
【図面の簡単な説明】
【0103】
【図1】図1は本発明の実施の形態1にかかるベルトコンベヤの全体構成を第3のフレームの手前側フレーム板を外し、かつ中間部分を省略して示す側面図である。
【図2】図2は本発明の実施の形態1にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図である。
【図3】図3(a)は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を示す平面図、(b)は側面図である。
【図4】図4は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構を示す縦断面図である。
【図5】図5は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構を示す左側面図である。
【図6】図6は本発明の実施の形態1にかかるベルトコンベヤの回転数増大伝達機構の一部を拡大して示す左側面図である。
【図7】図7は本発明の実施の形態2にかかるベルトコンベヤの駆動部分の構成を示す縦断面図である。
【図8】図8は本発明の実施の形態3にかかるベルトコンベヤの駆動部分を拡大して示す左側面図である。
【図9】図9は本発明の実施の形態4にかかるベルトコンベヤの駆動部分を拡大して示す左側面図である。
【符号の説明】
【0104】
1,41,51,61 ベルトコンベヤ
2 第2のフレーム
3 第3のフレーム
4 搬送ベルト
5 駆動ローラ
5a 駆動軸
6 従動ローラ
7 第1のプーリー
8 ワイヤ
9 第2のプーリー
10 回転数増大伝達機構
11 入力軸
12,66 入力レバー
13 フランジ付きガイド
13a フランジ
14 長いロッド
15 ばねホルダ
16 コイルばね
21 支持脚
25 支持部材
34a 歯がない部分
35,36 ワンウェイクラッチ
40 重り
44 クラッチ機構
45 回転式ハンドル
55,67 足踏みペダル
【特許請求の範囲】
【請求項1】
互いに離間対向した1対のフレームと、
前記1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、
前記1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、
前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、
長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、
人的エネルギーが前記伸縮エネルギー蓄積機構に加えられると、前記伸縮エネルギー蓄積機構に蓄積されたエネルギーによって長さ方向の伸縮が変化し、前記駆動ローラを特定方向のみ機械的に回転させる回転自在なプーリーと
を具備することを特徴とするベルトコンベヤ。
【請求項2】
互いに離間対向した1対のフレームと、
前記1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、
前記1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、
前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、
長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、
前記伸縮エネルギー蓄積機構に蓄積されたエネルギーが放出されるときにスライドする回転自在な第1のプーリーと、
一端を前記駆動軸の近傍の前記1対のフレームに設けられた止め具に固定され、他端を前記第1のプーリーに掛けてから前記駆動軸に一体に回転自在に固定された第2のプーリーに固定されて該第2のプーリーに巻き付けられたワイヤと、
前記1対のフレームに前記駆動軸と離して軸支された入力軸と、
前記入力軸と前記駆動軸の間に設けられた前記入力軸の回転を前記駆動軸に回転数を増大して伝達する回転数増大伝達機構と、
前記入力軸にその一端が固定された入力レバーと
を具備することを特徴とするベルトコンベヤ。
【請求項3】
前記伸縮エネルギー蓄積機構は、前記1対のフレームに前記搬送ベルトと平行に固定されたフランジ付きガイドと、前記フランジ付きガイドに嵌合して前記搬送ベルトと平行方向にスライドする長いロッドと、前記長いロッドの前記従動ローラよりに固定されたばねホルダと前記フランジ付きガイドのフランジとの間に前記長いロッドを取り巻いて取付けられたコイルばねとを具備することを特徴とする請求項1または請求項2に記載のベルトコンベヤ。
【請求項4】
前記駆動ローラは前記駆動軸が回転して前記伸縮エネルギー蓄積機構がエネルギーを蓄積するときには回転せず、前記駆動軸が回転して前記伸縮エネルギー蓄積機構が蓄積されたエネルギーを放出するときには回転するように、ワンウェイクラッチを介して前記駆動軸に取付けられていることを特徴とする請求項1乃至請求項3のいずれか1つに記載のベルトコンベヤ。
【請求項5】
前記回転数増大伝達機構は前記入力軸及び前記駆動軸に固定された歯車を含む複数の歯車とその回転軸の組み合わせからなり、
前記入力軸に固定された歯車には、前記入力レバーが回動されることによって前記コイルばねが充分圧縮された位置において該歯車に係合している歯車から係合が外れるように歯がない部分が設けられていることを特徴とする請求項3または請求項4に記載のベルトコンベヤ。
【請求項6】
前記入力軸に固定された歯車に係合している歯車の全ての歯は、前記入力軸に固定された歯車の歯がない部分に隣接された端部の歯が再び前記歯車と係合するときに回転して描く歯先の軌跡に相当する部分が削り落とされていることを特徴とする請求項5に記載のベルトコンベヤ。
【請求項7】
前記回転数増大伝達機構を構成する複数の歯車のうち前記入力軸及び前記駆動軸に固定された歯車以外の1つ以上の歯車が、その歯車の回転軸が前記コイルばねが圧縮される方向に回転するときには一体に回転し、前記駆動軸が前記コイルばねが弛緩する方向に回転するときには回転力を伝達しないように、ワンウェイクラッチを介して前記回転軸に取付けられていることを特徴とする請求項3乃至請求項6のいずれか1つに記載のベルトコンベヤ。
【請求項8】
前記駆動ローラの内部には前記駆動ローラの慣性を増すために全周に亘って重りが取付けられていることを特徴とする請求項1乃至請求項7のいずれか1つに記載のベルトコンベヤ。
【請求項9】
前記支持部材及び/または前記1対のフレームのいずれか一方または両方には前記搬送ベルトを必要な高さに支持するための複数の支持脚が取付けられていることを特徴とする請求項1乃至請求項8のいずれか1つに記載のベルトコンベヤ。
【請求項10】
前記入力レバーの代わりに前記入力軸の一端に回転式ハンドルを取付けたことを特徴とする請求項2乃至請求項9のいずれか1つに記載のベルトコンベヤ。
【請求項11】
前記入力軸と前記回転式ハンドルとの間にクラッチ機構を設けたことを特徴とする請求項10に記載のベルトコンベヤ。
【請求項12】
前記入力レバーの代わりにまたは前記入力レバーの先端に前記入力軸に回動力を伝達する足踏みペダルを設けたことを特徴とする請求項2乃至請求項9のいずれか1つに記載のベルトコンベヤ。
【請求項1】
互いに離間対向した1対のフレームと、
前記1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、
前記1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、
前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、
長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、
人的エネルギーが前記伸縮エネルギー蓄積機構に加えられると、前記伸縮エネルギー蓄積機構に蓄積されたエネルギーによって長さ方向の伸縮が変化し、前記駆動ローラを特定方向のみ機械的に回転させる回転自在なプーリーと
を具備することを特徴とするベルトコンベヤ。
【請求項2】
互いに離間対向した1対のフレームと、
前記1対のフレームに軸支された駆動軸に回転可能に取付けられた駆動ローラと、
前記1対のフレームに軸支された従動軸に回転可能に取付けられた従動ローラと、
前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、
長さ方向の伸縮でもって、エネルギーの蓄積状態を特定可能な伸縮エネルギー蓄積機構と、
前記伸縮エネルギー蓄積機構に蓄積されたエネルギーが放出されるときにスライドする回転自在な第1のプーリーと、
一端を前記駆動軸の近傍の前記1対のフレームに設けられた止め具に固定され、他端を前記第1のプーリーに掛けてから前記駆動軸に一体に回転自在に固定された第2のプーリーに固定されて該第2のプーリーに巻き付けられたワイヤと、
前記1対のフレームに前記駆動軸と離して軸支された入力軸と、
前記入力軸と前記駆動軸の間に設けられた前記入力軸の回転を前記駆動軸に回転数を増大して伝達する回転数増大伝達機構と、
前記入力軸にその一端が固定された入力レバーと
を具備することを特徴とするベルトコンベヤ。
【請求項3】
前記伸縮エネルギー蓄積機構は、前記1対のフレームに前記搬送ベルトと平行に固定されたフランジ付きガイドと、前記フランジ付きガイドに嵌合して前記搬送ベルトと平行方向にスライドする長いロッドと、前記長いロッドの前記従動ローラよりに固定されたばねホルダと前記フランジ付きガイドのフランジとの間に前記長いロッドを取り巻いて取付けられたコイルばねとを具備することを特徴とする請求項1または請求項2に記載のベルトコンベヤ。
【請求項4】
前記駆動ローラは前記駆動軸が回転して前記伸縮エネルギー蓄積機構がエネルギーを蓄積するときには回転せず、前記駆動軸が回転して前記伸縮エネルギー蓄積機構が蓄積されたエネルギーを放出するときには回転するように、ワンウェイクラッチを介して前記駆動軸に取付けられていることを特徴とする請求項1乃至請求項3のいずれか1つに記載のベルトコンベヤ。
【請求項5】
前記回転数増大伝達機構は前記入力軸及び前記駆動軸に固定された歯車を含む複数の歯車とその回転軸の組み合わせからなり、
前記入力軸に固定された歯車には、前記入力レバーが回動されることによって前記コイルばねが充分圧縮された位置において該歯車に係合している歯車から係合が外れるように歯がない部分が設けられていることを特徴とする請求項3または請求項4に記載のベルトコンベヤ。
【請求項6】
前記入力軸に固定された歯車に係合している歯車の全ての歯は、前記入力軸に固定された歯車の歯がない部分に隣接された端部の歯が再び前記歯車と係合するときに回転して描く歯先の軌跡に相当する部分が削り落とされていることを特徴とする請求項5に記載のベルトコンベヤ。
【請求項7】
前記回転数増大伝達機構を構成する複数の歯車のうち前記入力軸及び前記駆動軸に固定された歯車以外の1つ以上の歯車が、その歯車の回転軸が前記コイルばねが圧縮される方向に回転するときには一体に回転し、前記駆動軸が前記コイルばねが弛緩する方向に回転するときには回転力を伝達しないように、ワンウェイクラッチを介して前記回転軸に取付けられていることを特徴とする請求項3乃至請求項6のいずれか1つに記載のベルトコンベヤ。
【請求項8】
前記駆動ローラの内部には前記駆動ローラの慣性を増すために全周に亘って重りが取付けられていることを特徴とする請求項1乃至請求項7のいずれか1つに記載のベルトコンベヤ。
【請求項9】
前記支持部材及び/または前記1対のフレームのいずれか一方または両方には前記搬送ベルトを必要な高さに支持するための複数の支持脚が取付けられていることを特徴とする請求項1乃至請求項8のいずれか1つに記載のベルトコンベヤ。
【請求項10】
前記入力レバーの代わりに前記入力軸の一端に回転式ハンドルを取付けたことを特徴とする請求項2乃至請求項9のいずれか1つに記載のベルトコンベヤ。
【請求項11】
前記入力軸と前記回転式ハンドルとの間にクラッチ機構を設けたことを特徴とする請求項10に記載のベルトコンベヤ。
【請求項12】
前記入力レバーの代わりにまたは前記入力レバーの先端に前記入力軸に回動力を伝達する足踏みペダルを設けたことを特徴とする請求項2乃至請求項9のいずれか1つに記載のベルトコンベヤ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−36380(P2006−36380A)
【公開日】平成18年2月9日(2006.2.9)
【国際特許分類】
【出願番号】特願2004−214511(P2004−214511)
【出願日】平成16年7月22日(2004.7.22)
【出願人】(591284379)豊明工業株式会社 (6)
【公開日】平成18年2月9日(2006.2.9)
【国際特許分類】
【出願日】平成16年7月22日(2004.7.22)
【出願人】(591284379)豊明工業株式会社 (6)
[ Back to top ]