
ベルトコンベヤ
【課題】ベルトコンベヤにおいて支持部材に回転ローラを設けることで搬送ベルトの摩擦抵抗を殆どなくして、小さい駆動力で搬送ベルトを高速で走行させることができること。
【解決手段】ベルトコンベヤ1においては、支持部材としてのローラコンベヤ5に搬送ベルト4の搬送方向に回転する複数の回転ローラ5Bが設けられているので、搬送物の重さで搬送ベルト4の裏面が接触してもころがり摩擦となり、殆ど摩耗しなくて済むため、搬送ベルト4の寿命を著しく延ばすことができる。また、搬送ベルト4に掛かる抵抗が少なくなるため、同じ駆動エネルギーを掛けた場合には、走行距離がより伸びることになる。
【解決手段】ベルトコンベヤ1においては、支持部材としてのローラコンベヤ5に搬送ベルト4の搬送方向に回転する複数の回転ローラ5Bが設けられているので、搬送物の重さで搬送ベルト4の裏面が接触してもころがり摩擦となり、殆ど摩耗しなくて済むため、搬送ベルト4の寿命を著しく延ばすことができる。また、搬送ベルト4に掛かる抵抗が少なくなるため、同じ駆動エネルギーを掛けた場合には、走行距離がより伸びることになる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送ベルトの摩擦が殆どないため小さい駆動力で搬送ベルトを高速で走行させることができる省エネルギータイプのベルトコンベヤに関するものである。
【背景技術】
【0002】
従来のベルトコンベヤは、一般に無端状の搬送ベルトを備え、この搬送ベルトは電動モータ或いは空気圧モータによって回転される駆動ローラによって走行させられ、搬送ベルトの上面に載置されたワークを搬送するものである。例えば、特許文献1に開示された特許発明にかかるベルトコンベヤにおいては、搬送ベルトの損傷を小さくする工夫がなされているが、モータを内蔵した駆動ローラや減速機付きモータに接続された駆動ローラ等によって搬送ベルトを駆動している。
【特許文献1】特許第3058637号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ここで、搬送ベルトは駆動ローラ及び従動ローラに緊張した状態で掛けられており、通常は搬送ベルトの裏面を支持する支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルトがその部分で撓んで、搬送ベルトの裏面が支持部材と接触した状態となる。この状態で搬送ベルトを走行させると、搬送ベルトの裏面が支持部材と摩擦しながら移動することになり、搬送ベルトの裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルトの裏面が摩耗してしまう。
【0004】
それとともに、搬送ベルトの摩擦抵抗に抗して搬送ベルトを走行させるためには駆動力の大きい電動モータ或いは空気圧モータを用いなければならず、ベルトコンベヤの装置全体が大型になるとともに重量が大きくなり、さらには消費電力が大きくなってしまうという問題点があった。
【0005】
そこで、本発明は、支持部材に回転ローラを設けることによって搬送ベルトの摩擦抵抗を殆どなくすることができ、小さい駆動力で搬送ベルトを高速で走行させることができる省エネルギータイプのベルトコンベヤを提供することを課題とするものである。
【課題を解決するための手段】
【0006】
請求項1の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームの一方(駆動側フレーム)に軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、前記1対のフレームの他方(従動側フレーム)に軸支された従動軸に一体回転可能に取付けられた従動ローラと、前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材とを具備し、前記支持部材には全長に亘ってまたは前記支持部材の中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているものである。
【0007】
請求項2の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームの一方(駆動側フレーム)に軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、前記1対のフレームの他方(従動側フレーム)に軸支された従動軸に一体回転可能に取付けられた従動ローラと、前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、前記駆動ローラの駆動軸または前記駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、前記支持部材には全長に亘ってまたは前記支持部材の中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているものである。
【0008】
請求項3の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームの両方に軸支された1対の従動軸に一体回転可能に取付けられた1対の従動ローラと、前記1対の従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記1対の従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、前記1対の従動ローラの間において、前記支持部材に軸支された駆動軸に一体回転可能に取付けられ前記搬送ベルトを走行させる駆動ローラと、前記駆動ローラの駆動軸または前記駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、前記支持部材には前記駆動ローラが軸支された部分を除く全長に亘ってまたは前記1対の従動ローラ及び前記駆動ローラの中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているものである。
【発明の効果】
【0009】
請求項1の発明にかかるベルトコンベヤは、駆動側フレームに軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、従動側フレームに軸支された従動軸に一体回転可能に取付けられた従動ローラと、駆動ローラと従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、駆動ローラと従動ローラの間において、搬送ベルトの下方向への移動を制限し、搬送ベルトの裏面を支持する支持部材とを具備し、支持部材には全長に亘ってまたは支持部材の中間付近を中心として搬送ベルトが接触しても摩擦力が掛からないように搬送ベルトの搬送方向に回転する複数の回転ローラが設けられている。
【0010】
通常、搬送ベルトは駆動ローラ及び従動ローラに緊張した状態で掛けられており、支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルトがその部分で撓んで、搬送ベルトの裏面が支持部材と接触した状態となる。この状態で搬送ベルトを走行させると、搬送ベルトの裏面が支持部材と摩擦しながら移動することになり、搬送ベルトの表面には搬送物が滑らないように滑り難い素材を、搬送ベルトの裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルトの裏面には大きな摩擦抵抗が掛かる。
【0011】
しかし、本発明にかかるベルトコンベヤにおいては、支持部材に搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているので、搬送物の重さで搬送ベルトの裏面が接触してもころがり摩擦となり、殆ど摩擦抵抗を受けないため、小さな駆動力で搬送ベルトを高速で走行させることができる。
【0012】
ここで、複数の回転ローラは支持部材の全長に亘って設けても良いが、両端の駆動ローラ及び従動ローラに近い部分は搬送ベルトの撓みが少なくなり、支持部材に接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても効果がある。
【0013】
このようにして、支持部材に回転ローラを設けることによって搬送ベルトの摩擦抵抗を殆どなくすることができ、小さい駆動力で搬送ベルトを高速で走行させることができる省エネルギータイプのベルトコンベヤとなる。
【0014】
請求項2の発明にかかるベルトコンベヤは、駆動側フレームに軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、従動側フレームに軸支された従動軸に一体回転可能に取付けられた従動ローラと、駆動ローラと従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、駆動ローラと従動ローラの間において、搬送ベルトの下方向への移動を制限し、搬送ベルトの裏面を支持する支持部材と、駆動ローラの駆動軸または駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、支持部材には全長に亘ってまたは支持部材の中間付近を中心として搬送ベルトが接触しても摩擦力が掛からないように搬送ベルトの搬送方向に回転する複数の回転ローラが設けられている。
【0015】
通常、搬送ベルトは駆動ローラ及び従動ローラに緊張した状態で掛けられており、支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルトがその部分で撓んで、搬送ベルトの裏面が支持部材と接触した状態となる。この状態で搬送ベルトを走行させると、搬送ベルトの裏面が支持部材と摩擦しながら移動することになり、搬送ベルトの表面には搬送物が滑らないように滑り難い素材を、搬送ベルトの裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルトの裏面には大きな摩擦抵抗が掛かる。
【0016】
しかし、本発明にかかるベルトコンベヤにおいては、支持部材に搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているので、搬送物の重さで搬送ベルトの裏面が接触してもころがり摩擦となり、殆ど摩擦抵抗を受けないため、駆動力の小さい小型モータでも搬送ベルトを高速で走行させることができる。
【0017】
ここで、複数の回転ローラは支持部材の全長に亘って設けても良いが、両端の駆動ローラ及び従動ローラに近い部分は搬送ベルトの撓みが少なくなり、支持部材に接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても同様の作用効果が得られる。
【0018】
このようにして、支持部材に回転ローラを設けることによって搬送ベルトの摩擦抵抗を殆どなくすることができ、消費電力の少ない小型モータの小さい駆動力でも搬送ベルトを高速で走行させることができる省エネルギータイプのベルトコンベヤとなる。
【0019】
請求項3の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、1対のフレームの両方に軸支された1対の従動軸に一体回転可能に取付けられた1対の従動ローラと、1対の従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、1対の従動ローラの間において、搬送ベルトの下方向への移動を制限し、搬送ベルトの裏面を支持する支持部材と、1対の従動ローラの間において、支持部材に軸支された駆動軸に一体回転可能に取付けられ搬送ベルトを走行させる駆動ローラと、駆動ローラの駆動軸または駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、支持部材には駆動ローラが軸支された部分を除く全長に亘ってまたは1対の従動ローラ及び駆動ローラの中間付近を中心として搬送ベルトが接触しても摩擦力が掛からないように搬送ベルトの搬送方向に回転する複数の回転ローラが設けられている。
【0020】
本発明にかかるベルトコンベヤと請求項2の発明にかかるベルトコンベヤとの相違点は、駆動ローラ及び小型モータを1対のフレームの間に設けたことである。その他の部分については同様の構成を有しているため、本発明にかかるベルトコンベヤにおいても、支持部材に搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているので、搬送物の重さで搬送ベルトの裏面が接触してもころがり摩擦となり、殆ど摩擦抵抗がないため、駆動力の小さい小型モータでも搬送ベルトを高速で走行させることができる。
【0021】
ここで、複数の回転ローラは駆動ローラが軸支された部分を除く支持部材の全長に亘って設けても良いが、両端の従動ローラ及び駆動ローラに近い部分は搬送ベルトの撓みが少なくなり、支持部材に接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても同様の作用効果が得られる。
【0022】
このようにして、搬送ベルトの摩擦抵抗が殆どないため駆動力の小さい小型モータで搬送ベルトを走行させることができる、電力を少ししか必要としない省エネルギータイプのベルトコンベヤとなる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照しつつ説明する。
【0024】
実施の形態1
まず、本発明の実施の形態1について、図1乃至図4を参照して説明する。
【0025】
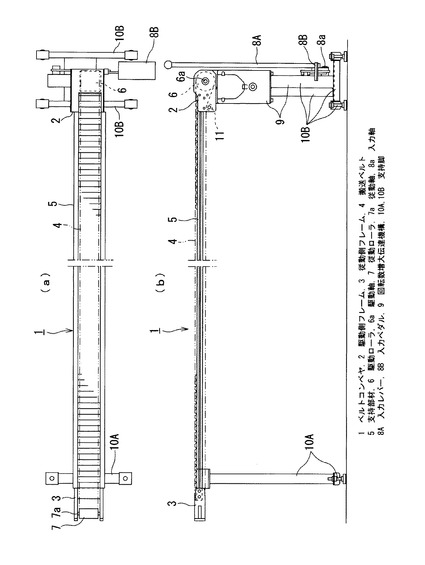
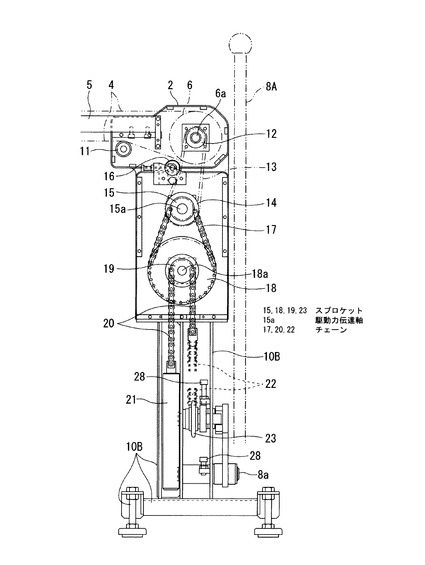
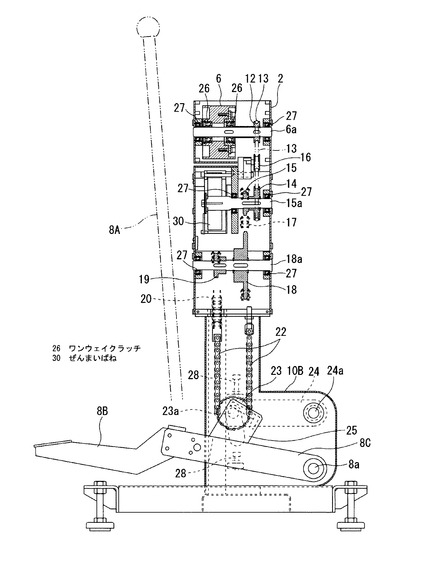
図1(a)は本発明の実施の形態1にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図、(b)は正面図である。図2は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を正面側から見て示す縦断面図である。図3は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を右側面側から見て示す縦断面図である。図4は本発明の実施の形態1にかかるベルトコンベヤの従動ローラ近傍を拡大して示す斜視図である。
【0026】
図1に示されるように、本実施の形態1にかかるベルトコンベヤ1は、図示しないアルミニウム棒を間に挟んで組付けた2枚のメッキ鋼板からなる1対のフレームの一方としての駆動側フレーム2と、それと離間対向した2枚のメッキ鋼板からなる1対のフレームの他方としての従動側フレーム3と、これら1対のフレーム2,3に両端を固定された支持部材としてのローラコンベヤ5と、ローラコンベヤ5側面の1対のフレーム2,3近傍に1対ずつ取付けられた支持脚10A,10B(向う側の支持脚はそれぞれ手前側の支持脚10A,10Bに重なって図示されず)とを基本骨格として構成されている。
【0027】
駆動側フレーム2には駆動軸6aが水平に軸支され、駆動ローラ6が一体回転可能に取付けられており、同様に従動側フレーム3には従動軸7aが水平に軸支され、従動ローラ7が一体回転可能に取付けられ、これら駆動ローラ6と従動ローラ7には無端状の走行可能な搬送ベルト4が掛け渡されている。
【0028】
駆動軸6aと、駆動側フレーム2に同じく水平に軸支された入力軸との間には、後述する回転数増大伝達機構9が駆動側フレーム2内に設けられており、入力軸に図示しないリンク部材を介して固定された入力レバー8Aを手で持って回動させるか、入力軸に図示しないリンク部材を介して固定された入力ペダル8Bを足で踏んで回動させることによって、駆動軸6aに駆動力を伝達する駆動力伝達軸に駆動側フレーム2の向う側において取付けられている図示しないぜんまいばねが巻き上げられるようになっている。
【0029】
入力レバー8A(図1(a)では図示省略されている)が取付けられているリンクは、図1(b)においては回転数増大伝達機構9内の図示しない上部ストッパーに当接しており、入力レバー8Aがこの位置にあるときに、図示しないぜんまいばねは最も弛緩した状態になっている。この原点位置から、作業者が入力レバー8Aの先端のグリップ部を握って、図1(b)の紙面に垂直な方向に手前側に約13度回動させると、回転数増大伝達機構9の作用によって駆動力伝達軸は約2.1回転して、ぜんまいばねも約2.1回転分巻き上げられて弾性エネルギーを蓄積する。
【0030】
また、図1(a),(b)に示されるように、入力レバー8Aが取付けられているリンクには入力ペダル8Bも取付けられており、この入力ペダル8Bをリンクが回転数増大伝達機構9内の図示しない下部ストッパーに当接するまで踏み込むことによって、リンクは入力レバー8Aを約13度回動させたのと同じだけ回動して、回転数増大伝達機構9の作用によって駆動力伝達軸は約2.1回転して、ぜんまいばねも約2.1回転分巻き上げられて弾性エネルギーを蓄積する。
【0031】
このように本実施の形態1にかかるベルトコンベヤ1においては、入力レバー8Aを約13度回動させるだけで、ぜんまいばねを約2.1回転分巻き上げることができ、入力レバー8A,入力ペダル8Bの回動角度がより小さくても搬送ベルト4を長く送ることができる。
【0032】
なお、ぜんまいばねを約3.5回転分巻き上げると弾性エネルギーを最大限蓄積することができるが、ぜんまいばねを毎回最大限まで巻き上げているとぜんまいばねの寿命が短くなることと、巻き上げるのに必要な力が大きくなることから、本実施の形態1においてはぜんまいばねを約2.1回転分、即ち最大限の6割だけ巻き上げることとして、ぜんまいばねの寿命を長く保つとともに巻き上げるのに必要な力が小さくて済むようにしている。
【0033】
また、図1(a)に示されるように、支持部材としてのローラコンベヤ5の幅は搬送ベルト4の幅より広いため、ローラコンベヤ5の側面は搬送ベルト4から突出しており、支持脚10Aはローラコンベヤ5の側面に直接取付けることができる。但し、ローラコンベヤ5の幅で真っ直ぐ降ろしたのでは幅が狭くて安定性が悪いので、まず固定板をローラコンベヤ5の側面中央の溝に固定ボルトで固定して、固定板の下端の脚部は紙面に垂直な面内において傾斜させて外側へ拡がるようにし、脚部の下端は水平に曲げて接地シャフト及び接地ゴムをナットで固定して支持脚10Aが構成されている。
【0034】
これによって、図1(a)の平面図に示されるように、支持脚10Aはローラコンベヤ5の側面から左右に拡がって接地し、充分な安定性を持って搬送ベルト4を所定の高さに支持することができる。なお、支持部材としてのローラコンベヤ5は、駆動側フレーム2には左右4本ずつ計8本の固定ボルトによって締付け固定され、従動側フレーム3には左右2本ずつ計4本の固定ボルトによって締付け固定されている。
【0035】
次に、回転数増大伝達機構9の詳細な構成について、図2及び図3を参照して説明する。図2及び図3に示されるように、駆動側フレーム2の2枚のメッキ鋼板の間には、駆動ローラ6が、駆動側フレーム2に2個のボールベアリング軸受け27によって水平に軸支された駆動軸6aに、ワンウェイクラッチ26を介して一体回転可能に取付けられている。駆動ローラ6の内部には、慣性を増すために全周に亘って図示しない重りが取付けられており、駆動ローラ6の外周には搬送ベルト4が掛けられている。
【0036】
駆動軸6aの奥側には、駆動ローラ6と並んで駆動プーリー12が一体回転可能に取付けられており、この駆動プーリー12には、下方のフレームに2個のボールベアリング軸受け27によって水平に軸支された駆動力伝達軸15aに一体回転自在に取付けられたぜんまいプーリー14との間に、丸ベルト13が掛け渡されている。丸ベルト13にはテンションプーリー16が押し付けられており、丸ベルト13の駆動プーリー12とぜんまいプーリー14への掛け渡しを容易にしつつ、駆動力伝達軸15aから駆動軸6aへ駆動力が無駄なく伝達されるように丸ベルト13にテンションがかけられている。
【0037】
そして、図3に示されるように、駆動力伝達軸15aには、ぜんまいばね30が巻上げ・弛緩可能に取付けられている。このぜんまいばね30は、図2において駆動力伝達軸15aが右回り方向(時計回り方向)に回転する場合には弾性力に抗して巻き上げられて弾性エネルギーを蓄積し、駆動力伝達軸15aが左回り方向(反時計回り方向)に回転する場合には弛緩して、弾性エネルギーを放出する。
【0038】
さらに、図3に示されるように、駆動力伝達軸15aには、ぜんまいばね30とぜんまいプーリー14との間に小スプロケット16が一体回転可能に取付けられており、この小スプロケット16には、下方に2個のボールベアリング軸受け27によって水平に軸支された回転軸18aに一体回転可能に取付けられた大スプロケット18との間に、チェーン17が掛け渡されている。
【0039】
また、回転軸18aには小スプロケット19が一体回転可能に取付けられており、この小スプロケット19にはチェーン20が掛けられており、図2に示されるように、チェーン20の一方の端には円柱状のバランスウエイト21が上下方向にスライド可能に固定されている。また、チェーン20の他方の端には90度捻られた方向にチェーン22が接続されており、このチェーン22は、図3に示されるように、リンク24の先端に回転自在に取付けられたスプロケット23に掛けられて、下方のフレームの底面にその先端が固定されている。
【0040】
リンク24の後端は、支持脚10Bを構成するフレームに回転軸24aによって回転自在に軸支されており、さらに、スプロケット23の回転軸23aには、接続部材25を介して入力リンク8Cが支持脚10Bを構成するフレームに入力軸8aによって回転自在に軸支されている。入力リンク8Cの先端近傍には、想像線で示されるように入力レバー8Aが接続されており、また図3に示されるように、入力ペダル8Bが固定されている。
【0041】
そして、図2に示されるように、支持脚10Bを構成するフレーム内にリンク24の回動を規制する一組の上下ストッパー28を設けたことによって、入力レバー8Aは一定範囲(本実施の形態1においては約13度)しか回動せず、入力ペダル8Bは一定範囲(本実施の形態1においては約100mm)しか踏み込むことができない。これによって、ぜんまいばね30の巻き過ぎを確実に防止するとともに、搬送ベルト4の搬送距離を(ぜんまいばね30の巻上げ数を約2.1回転とすることによって)規定している。
【0042】
なお、本実施の形態1にかかるベルトコンベヤ1においては、入力レバー8Aと入力ペダル8Bが共に備えられた構成として、作業者が入力レバー8Aを手で回動させてベルトコンベヤ1を作動させるか、入力ペダル8Bを足で踏んでベルトコンベヤ1を作動させるかを自由に選択できるようにしているが、入力レバー8Aか入力ペダル8Bかいずれか一方のみを備えた構成としても良い。
【0043】
次に、本実施の形態1にかかるベルトコンベヤ1の支持部材としてのローラコンベヤ5について、図4を参照して説明する。
【0044】
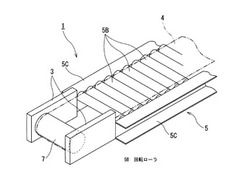
図4に示されるように、本実施の形態1にかかるベルトコンベヤ1においては、搬送ベルト4の支持部材として、断面コの字形の1対のレール5Cの間に複数の回転ローラ5Bを回転自在に取付けたローラコンベヤ5を使用している。
【0045】
通常、搬送ベルト4は駆動ローラ6及び従動ローラ7に緊張した状態で掛けられており、支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルト4がその部分で撓んで、搬送ベルト4の裏面が支持部材と接触した状態となる。この状態で搬送ベルト4を走行させると、搬送ベルト4の裏面が支持部材と摩擦しながら移動することになり、搬送ベルト4の裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルト4の裏面が摩耗してしまう。
【0046】
しかし、本実施の形態1にかかるベルトコンベヤ1においては、支持部材としてのローラコンベヤ5に搬送ベルト4の搬送方向に回転する複数の回転ローラ5Bが設けられているので、搬送物の重さで搬送ベルト4の裏面が接触してもころがり摩擦となり、殆ど摩耗しなくて済むため、搬送ベルト4の寿命を著しく延ばすことができる。また、搬送ベルト4に掛かる抵抗が少なくなるため、同じ駆動エネルギーを掛けた場合には、走行距離がより伸びることになる。
【0047】
ここで、本実施の形態1においては、複数の回転ローラ5Bを支持部材5の全長に亘って設けているが、両端の駆動ローラ6及び従動ローラ7に近い部分は搬送ベルト4の撓みが少なくなり、支持部材5に接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても効果がある。
【0048】
このようにして、本実施の形態1にかかるベルトコンベヤ1においては、電力を全く必要としないだけでなく、より軽くより安価でよりコンパクトで、入力レバー8A・入力ペダル8Bの回動角度がより小さくても搬送ベルト4をより長く送ることができるとともに搬送ベルト4の寿命を延ばすことができる。
【0049】
このような構成を有する本実施の形態1にかかるベルトコンベヤ1の作動原理について、図1乃至図3を参照して説明する。初期状態においては、前述したバランスウエイト21の重さによってチェーン20及びチェーン22を介してスプロケット23が引き上げられ、リンク24は一組の上下ストッパー28のうち上方ストッパー28に当接して止まった状態になっている。
【0050】
この状態から、作業者が入力レバー8Aを手で回動させ或いは入力ペダル8Bを足で踏むことによって、リンク24は下方ストッパー28に当接するまで回動して、スプロケット23が下降する(入力ペダル8Bが約100mm下降することによってスプロケット23は約45mm下降する)のに伴ってチェーン22及びチェーン20を介して、バランスウエイト21の重さに抗して小スプロケット19が図2において(即ち、正面から見て)右回り(時計回り)方向に約0.7回転し、回転軸18aに一体回転可能に取付けられた大スプロケット18も同じく右回り(時計回り)方向に約0.7回転する。
【0051】
この回転は、チェーン17によって小スプロケット15に伝達されるが、小スプロケット15の歯数は大スプロケット18の歯数の3分の1であるため、大スプロケット18が約0.7回転することによって小スプロケット15は右回り(時計回り)方向に約2.1回転して、駆動力伝達軸15aも右回り(時計回り)方向に約2.1回転するため、駆動力伝達軸15aに取付けられたぜんまいばね30も約2.1回転分巻き上げられる。
【0052】
ここで、駆動力伝達軸15aが正面から見て右回り(時計回り)方向に約2.1回転するのに伴って、駆動力伝達軸15aに固定されたぜんまいプーリー14も右回り(時計回り)方向に約2.1回転し、この回転は丸ベルト13によって駆動プーリー12に伝達されて、駆動軸6aが(ぜんまいプーリー14の直径が駆動プーリー12の直径の約1.5倍であるため)右回り(時計回り)方向に約3.2回転するが、駆動ローラ6はワンウェイクラッチ26を介して駆動軸6aに取付けられているため、駆動軸6aが正面から見て右回り(時計回り)方向に回転しても駆動ローラ6は回転せず、したがって搬送ベルト4も移動することはない。
【0053】
これによって、ぜんまいばね30を巻き上げるのに余分な力を必要とせず、またぜんまいばね30を巻き上げる際に搬送ベルト4が逆走するという不具合も起きることがない。
【0054】
このようにぜんまいばね30を巻き上げて弾性エネルギーを蓄えた状態で、作業者が入力レバー8A或いは入力ペダル8Bを開放すると、バランスウエイト21の重量及びぜんまいばね30の弾性エネルギーが相俟って、入力レバー8A及び入力ペダル8Bが原点に復帰するとともに、リンク24が先端に取付けられたスプロケット23が上昇する方向に回動し、小スプロケット19が正面から見て左回り(反時計回り)方向に約0.7回転し、回転軸18aに一体回転可能に取付けられた大スプロケット18も同じく左回り(反時計回り)方向に約0.7回転する。
【0055】
この回転は、チェーン17によって小スプロケット15に伝達され、小スプロケット15の歯数が大スプロケット18の歯数の3分の1であるため、大スプロケット18が約0.7回転することによって小スプロケット15は正面から見て左回り(反時計回り)方向に約2.1回転して、駆動力伝達軸15aも左回り(反時計回り)方向に約2.1回転するため、ぜんまいプーリー14も左回り(反時計回り)方向に約2.1回転する。
【0056】
この回転は、丸ベルト13によって駆動プーリー12に伝達されて、駆動軸6aが左回り(反時計回り)方向に約3.2回転するため、ワンウェイクラッチ26が噛み合って、駆動ローラ6も正面から見て左回り(反時計回り)方向に回転して、これによって搬送ベルト4が従動ローラ7方向に走行する。ここで、前述の如く、駆動ローラ6の内部には慣性を増すために全周に亘って重りが取付けられているため、駆動ローラ6は約3.2回転以上回転して、搬送ベルト4をより長距離走行させて、搬送ベルト4に載置された搬送物をより長距離搬送することができる。
【0057】
また、作業者が入力レバー8A或いは入力ペダル8Bを少しずつ元に戻すことによって、搬送ベルト4を少しずつ走行させて、搬送ベルト4に載置された搬送物を少しずつ搬送すること(寸動送り)も容易にできる。
【0058】
このように、本実施の形態1にかかるベルトコンベヤ1においては、回転数増大伝達機構9をスプロケット15,18,19,23及びチェーン17,20,22、並びにプーリー12,14と丸ベルト13で構成したために、僅かな部品点数と自由な配置で構成することができ、かつスプロケット及びチェーンやプーリーと丸ベルトは歯車よりも軽量でしかも安価であるため、ベルトコンベヤ1としても回転数増大伝達機構9の部分がコンパクトになるとともに全体としても軽量かつ低コストにすることができる。
【0059】
また、スプロケット及びチェーンは自由な配置で構成できるため、回転数増大の効果が大きく、上記特許文献2の実施の形態(回転数増大伝達機構を歯車で構成したもの)では入力レバーを約150度回動させないとぜんまいばねを約3.5回転分巻き上げられなかったのに対して、本実施の形態1のベルトコンベヤ1においては、入力レバー8Aを僅か約13度回動させるだけでぜんまいばね30を約2.1回転分巻き上げることができ、入力レバーの回動角度を凡そ10分の1にすることができるという作用効果が得られる。
【0060】
さらに、本実施の形態1のベルトコンベヤ1は、電力が不要で全体としても軽量であるという長所を生かして、移動設置式のベルトコンベヤとしての用途が広がるものと考えられる。例えば、河川の堤防決壊による洪水時に、現場へ運んで設置して土嚢を搬送する等の緊急時の用途にも対応できる。
【0061】
このようにして、本実施の形態1にかかるベルトコンベヤ1においては、電力を全くしないだけでなく、より軽くより安価でよりコンパクトで、入力レバー8A・入力ペダル8Bの回動角度がより小さくても搬送ベルト4を長く送ることができる。
【0062】
さらに、本実施の形態1にかかるベルトコンベヤ1の特有の作用効果として、図2に示されるように、バランスウエイト21を正面から見て左側に配置して、入力軸8aを右側に配置することによって、入力レバー8Aまたは入力ペダル8Bを回動させるとぜんまいばね30が正面から見て右回り(時計回り)方向に巻き上げられて弾性エネルギーが蓄積され、入力レバー8Aまたは入力ペダル8Bを開放すると駆動ローラ6が正面から見て左回り(反時計回り)方向に回転して、搬送ベルト4が左方向に走行する。
【0063】
したがって、バランスウエイト21を正面から見て右側に配置して、入力軸8aを左側に配置するとともに、ぜんまいばね30を逆向きに取付けることによって、駆動ローラ6が正面から見て右回り(時計回り)方向に回転して、搬送ベルト4が右方向に走行するので、部品を増やしたり交換したりする必要がなく、極めて容易に搬送ベルト4の走行方向を逆にすることができるという利点がある。
【0064】
なお、本実施の形態1においては、ぜんまいばね30を駆動軸6aに駆動力を伝達する駆動力伝達軸15aに取付けた場合について説明したが、ぜんまいばね30を駆動軸6aに直接取付けることもできる。
【0065】
実施の形態2
次に、本発明の実施の形態2について、図5乃至図7を参照して説明する。
【0066】
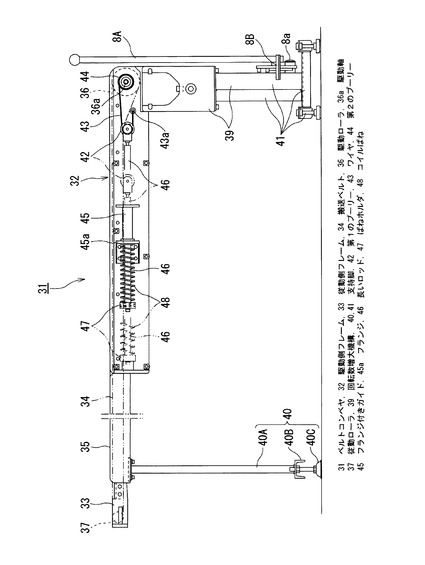
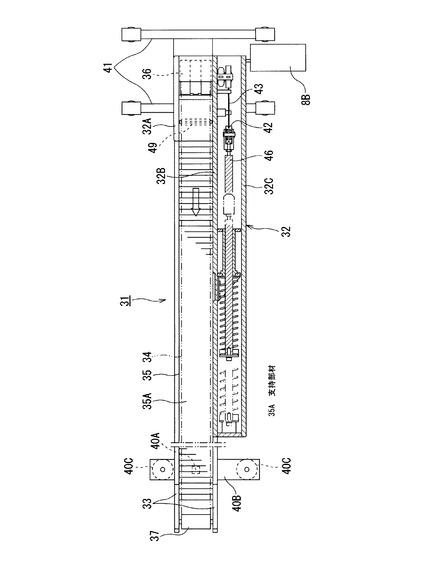
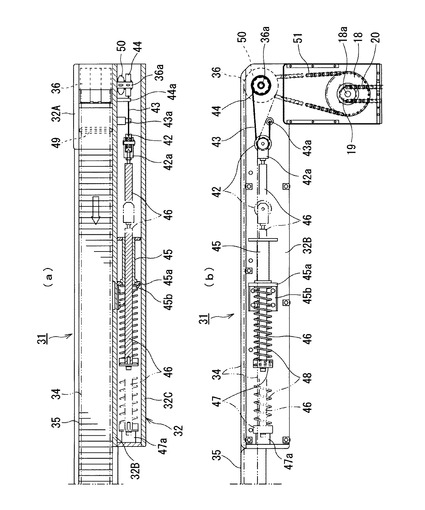
図5は本発明の実施の形態2にかかるベルトコンベヤの全体構成を駆動側フレームの一部を構成する第3のフレームの手前側フレーム板を外し、かつ中間部分を省略して示す側面図である。図6は本発明の実施の形態2にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図である。図7(a)は本発明の実施の形態2にかかるベルトコンベヤの駆動部分の構成を示す平面図、(b)は側面図である。
【0067】
なお、本発明の実施の形態2にかかるベルトコンベヤの回転数増大伝達機構39の構成は、一部を除いて実施の形態1のベルトコンベヤ1の回転数増大伝達機構9の構成と同様であるため、一部を図示して説明し、同一の部分については図示及び説明を省略する。
【0068】
図5に示されるように、本実施の形態2にかかるベルトコンベヤ31は、支持部材を間に挟んで組付けた第2のフレームとしての従動側フレーム33と、それと離間対向した、第3のフレームと中間のフレーム板を共用する第1のフレームとからなる全体が図示されない駆動側フレーム32と、駆動側フレーム32に軸支された駆動軸36aに一体回転可能に取付けられた駆動ローラ36と、従動側フレーム33に軸支された従動軸に一体回転可能に取付けられた従動ローラ37と、駆動ローラ36と従動ローラ37に掛け渡された無端状の走行可能な搬送ベルト34を中心として構成されている。
【0069】
さらに、これら1対の全体が図示されない駆動側フレーム32と従動側フレーム33に両端を固定された支持部材としての図示されないローラコンベヤには、搬送ベルト34の両側面をカバーするように両側面に突出した断面コの字形のパネル35が、駆動側フレーム32と従動側フレーム33の間に亘ってネジ止めされている。
【0070】
この断面コの字形のパネル35には、コの字形パネル35の底面左端と駆動側フレーム32の一部を構成する第3のフレームの右端に、搬送ベルト34を必要な高さに支持するための支持脚40,41がそれぞれ取付けられている。安定を保つために、支持脚40の脚部本体40Aの下端には紙面に垂直方向に伸びるコの字形部材40Bが固定され、コの字形部材40Bの手前側と向う側にはそれぞれ支持底40Cが固定されている。
【0071】
一方、右側の支持脚41は、駆動側フレーム32の下方に接続された回転数増大伝達機構39のフレームの下に設けられており、重量のある駆動側フレーム32及び回転数増大伝達機構39を支持するため、図6の平面図で示されるように、H字形の底面脚部が設けられている。
【0072】
駆動側フレーム32の一部を構成する第3のフレーム(手前側フレーム板32Cと中間フレーム板32Bとからなる)の中間フレーム板32Bにはフランジ付きガイド45が搬送ベルト34と平行に固定され、フランジ付きガイド45には長いロッド46が嵌合して搬送ベルト34と平行方向にガタツキなくスライドする。この長いロッド46の左端には、ばねホルダ47が固定されており、フランジ付きガイド45のフランジ45aとばねホルダ47の間には、コイルばね48が長いロッド46を取り巻いて取付けられている。
【0073】
一方、長いロッド46の右端には第1のプーリー42が回転自在に取付けられ、駆動側フレーム32の一部を構成する第3のフレームの中間フレーム板32Bには丈夫でかつ柔軟なワイヤ43の一端が固定され、第1のプーリー42に掛けられてから、第3のフレーム内に突出した駆動軸36aに一体回転自在に固定された第2のプーリー44に巻き付けられて、この第2のプーリー44にワイヤ43の他端が固定されている。
【0074】
さらに、駆動側フレーム32の右端には、回転数増大伝達機構39の一部を収納する下方フレームが駆動側フレーム32を支持するように設けられており、さらにこの下方フレームは駆動側の支持脚41の一部を構成する支持フレームによって支持されている。この支持フレーム内にも、回転数増大伝達機構39の一部が収納されており、支持フレームの下方には、実施の形態1と同様の入力軸8aが駆動軸36aと離して駆動軸36aと同じく水平に軸支されている。
【0075】
この入力軸8aには、実施の形態1と同様の入力リンク8Cを介して、実施の形態1と同様の入力レバー8A及び入力ペダル8Bが一体に回動可能に固定されている。そして、入力軸8aと駆動軸36aとの間には、入力軸8aの回転を駆動軸36aに回転数を増大して伝達する回転数増大伝達機構39が設けられている。
【0076】
次に、図6の平面図を参照して、本実施の形態2にかかるベルトコンベヤ31についてさらに詳細に説明する。
【0077】
図6に示されるように、駆動側フレーム32の中間フレーム板32Bの向う側には、中間フレーム板32Bとの間で駆動軸36aを水平に軸支する第1のフレームの外側フレーム板32Aが設けられており、駆動軸36aには駆動ローラ36が一体回転可能に取付けられている。第1のフレーム(外側フレーム板32Aと中間フレーム板32Bの一部とからなる)とこれに離間対向して設けられた第2のフレーム33との間には、搬送ベルト34の上側を支持するための支持部材としてのローラコンベヤ35Aが架け渡されて、駆動側フレーム32の一部を構成する第1のフレームと従動側フレームとしての第2のフレーム33にそれぞれ固定されている。
【0078】
そして、駆動ローラ36と従動ローラ37には無端状の搬送ベルト34が張った状態で掛け渡されており、後述するように入力レバー8Aまたは入力ペダル8Bを操作することによって、白い矢印の方向へ高速で移動して搬送ベルト34の上に載置された製品等を搬送する。また、前述の如く、コの字形パネル35の底面左端には搬送ベルト34を必要な高さに支持するための支持脚40が取付けられている。安定を保つために、この支持脚40の支持脚本体40Aの下端にはコの字形部材40Bが固定され、コの字形部材40Bの両端にはそれぞれ支持底40Cが固定されている。
【0079】
次に、本実施の形態2にかかるベルトコンベヤ31の駆動機構について、図7を参照してさらに説明する。
【0080】
図7(a),(b)に示されるように、フランジ付きガイド45のフランジ45aにはブラケット45bが一体になっており、このブラケット45bにおいて、中間フレーム板32Bに4本のネジでネジ止めされている。また、図7(a)に示されるように、外側フレーム板32Aと中間フレーム板32Bの間には補助ローラ49が回転自在に軸支されており、この補助ローラ49は図7(b)に示されるように、搬送ベルト34の張りを一段と強くし、且つ搬送ベルト34の下側を従動ローラ37までの間、搬送ベルト34の上側とほぼ平行にし、見栄えを良くしたものである。
【0081】
また、コイルばね48が実線で示される圧縮された状態から想像線で示される伸びた状態となり、長いロッド46が実線で示される位置から想像線で示される位置まで高速でスライドする際に、ばねホルダ47が第3のフレーム32の左端に衝突する衝撃を緩和するために、ゴム製のストッパー47aが設けられている。
【0082】
さらに、この際に第2のプーリー44が高速回転して巻き取られていたワイヤ43が波打って第2のプーリー44から外れるのを防ぐために、第2のプーリー44の近傍にワイヤ抑え44aが固定されている。このワイヤ抑え44aには端面に深い溝が切ってあり、ワイヤ43はこの溝の中を通っている。ワイヤ43の一端はワイヤ止め43aに強固に固定されており、第1のプーリー42に掛けられた後、前記ワイヤ抑え44aの深い溝の中を通って第2のプーリー44に巻き付けられ、ワイヤ43の他端は第2のプーリー44に強固に固定されている。
【0083】
一方、駆動側フレーム32の一部を構成する第3のフレーム内に突出した駆動軸36aに固定されている第2のプーリー44の向こう側には、やはり駆動軸36aと一体に回転する小径のスプロケット50が固定されており、この小スプロケット50には、実施の形態1と同様に下方フレームに軸支された回転軸18aと一体に回転する大径のスプロケット18との間に、チェーン51が掛けられている。この回転軸18aには、やはり一体に回転する小径のスプロケット19が固定されており、この小スプロケット19には実施の形態1と同様にチェーン20が掛けられている。
【0084】
以下の構成は、図2及び図3の下半分に示される実施の形態1と同様であるので、図示及び説明を省略する。即ち、本実施の形態2にかかる回転数増大伝達機構39と実施の形態1にかかる回転数増大伝達機構9との違いは、大スプロケット18に掛けられているチェーン51が、駆動力伝達軸に固定されたスプロケットではなく、駆動軸36aに固定されたスプロケット50に直接掛けられている点にある。
【0085】
次に、本実施の形態2にかかるベルトコンベヤ31の支持部材としてのローラコンベヤ35Aについて、図4を参考にしながら説明する。
【0086】
図4に示される実施の形態1にかかるベルトコンベヤ1と同様に、本実施の形態2にかかるベルトコンベヤ31においても、搬送ベルト34の支持部材として、断面コの字形の1対のレール35Cの間に複数の回転ローラ35Bを回転自在に取付けたローラコンベヤ35Aを使用している。
【0087】
通常、搬送ベルト34は駆動ローラ36及び従動ローラ37に緊張した状態で掛けられており、支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルト34がその部分で撓んで、搬送ベルト34の裏面が支持部材と接触した状態となる。この状態で搬送ベルト34を走行させると、搬送ベルト34の裏面が支持部材と摩擦しながら移動することになり、搬送ベルト34の裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルト34の裏面が摩耗してしまう。
【0088】
しかし、本実施の形態2にかかるベルトコンベヤ31においては、支持部材としてのローラコンベヤ35Aに搬送ベルト34の搬送方向に回転する複数の回転ローラ35Bが設けられているので、搬送物の重さで搬送ベルト34の裏面が接触してもころがり摩擦となり、殆ど摩耗しなくて済むため、搬送ベルト34の寿命を著しく延ばすことができる。また、搬送ベルト34に掛かる抵抗が少なくなるため、同じ駆動エネルギーを掛けた場合には、走行距離がより伸びることになる。
【0089】
ここで、本実施の形態2においても、複数の回転ローラ35Bを支持部材35Aの全長に亘って設けているが、両端の駆動ローラ36及び従動ローラ37に近い部分は搬送ベルト34の撓みが少なくなり、支持部材35Aに接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても効果がある。
【0090】
このようにして、本実施の形態2にかかるベルトコンベヤ31においては、電力を全く必要としないだけでなく、より軽くより安価でよりコンパクトで、入力レバー8A・入力ペダル8Bの回動角度がより小さくても搬送ベルト34をより長く送ることができるとともに搬送ベルト34の寿命を延ばすことができる。
【0091】
このような構成を有する本実施の形態2にかかるベルトコンベヤ31における搬送ベルト34の走行の仕組みについて、図5乃至図7及び図2乃至図4を参照して説明する。初期状態においては、実施の形態1と同様にバランスウエイト21の重さによってチェーン20及びチェーン22を介してスプロケット23が引き上げられ、リンク24は一組の上下ストッパー28のうち上方ストッパー28に当接して止まった状態になっている。
【0092】
この状態から、作業者が入力レバー8Aを手で回動させ或いは入力ペダル8Bを足で踏むことによって、リンク24は下方ストッパー28に当接するまで回動して、スプロケット23が下降する(入力ペダル8Bが約100mm下降することによってスプロケット23は約45mm下降する)のに伴ってチェーン22及びチェーン20を介して、バランスウエイト21の重さに抗して小スプロケット19が図7(b)において(即ち、正面から見て)右回り(時計回り)方向に約0.7回転し、回転軸18aに一体回転可能に取付けられた大スプロケット18も同じく右回り(時計回り)方向に約0.7回転する。
【0093】
この回転は、チェーン51によって小スプロケット50に伝達されるが、小スプロケット50の歯数は大スプロケット18の歯数の4分の1であるため、大スプロケット18が約0.7回転することによって小スプロケット50は右回り(時計回り)方向に約2.8回転して、駆動軸36aも右回り(時計回り)方向に約2.8回転するため、駆動軸36aに固定されている第2のプーリー44はワイヤ43を巻き取る方向に回転する。
【0094】
これによって、図6及び図7に示されるように、想像線で示される原位置にあった第1のプーリー42はワイヤ43が巻き取られるに連れて右側へ引張られるので、長いロッド46も想像線で示される原位置から実線で示される位置までスライドして、弛緩していたコイルばね48も実線で示されるように圧縮される。このとき、駆動軸36aに固定されている図示されないワンウェイクラッチが回動を駆動ローラ36に伝達しないため、搬送ベルト34が逆方向に走行することもなく、軽い力でコイルばね48を圧縮することができる。
【0095】
このようにコイルばね48を圧縮して弾性エネルギーを蓄えた状態で、作業者が入力レバー8A或いは入力ペダル8Bを開放すると、バランスウエイト21の重量及びコイルばね48の弾性エネルギーが相俟って、入力レバー8A及び入力ペダル8Bが原点に復帰するとともに、リンク24が先端に取付けられたスプロケット23が上昇する方向に回動し、小スプロケット19が正面から見て左回り(反時計回り)方向に約0.7回転し、回転軸18aに一体回転可能に取付けられた大スプロケット18も同じく左回り(反時計回り)方向に約0.7回転する。
【0096】
この回転は、チェーン51によって小スプロケット50に伝達され、小スプロケット50の歯数が大スプロケット18の歯数の4分の1であるため、大スプロケット18が約0.7回転することによって小スプロケット50は正面から見て左回り(反時計回り)方向に約2.8回転して、駆動軸36aも左回り(反時計回り)方向に約2.8回転するため、図示しないワンウェイクラッチが噛み合って、駆動ローラ36も正面から見て左回り(反時計回り)方向に回転して、これによって搬送ベルト34が従動ローラ37方向に走行する。
【0097】
ここで、前述の如く、駆動ローラ36の内部には慣性を増すために全周に亘って重りが取付けられているため、駆動ローラ36は約2.8回転以上回転して、搬送ベルト34をより長距離走行させて、搬送ベルト34に載置された搬送物をより長距離搬送することができる。
【0098】
また、作業者が入力レバー8A或いは入力ペダル8Bを少しずつ元に戻すことによって、搬送ベルト34を少しずつ走行させて、搬送ベルト34に載置された搬送物を少しずつ搬送すること(寸動送り)も容易にできる。
【0099】
このように、本実施の形態2にかかるベルトコンベヤ31においては、回転数増大伝達機構39をスプロケット18,19,23,50及びチェーン20,22,51で構成したために、僅かな部品点数と自由な配置で構成することができ、かつスプロケット及びチェーンは歯車よりも軽量でしかも安価であるため、ベルトコンベヤ31としても回転数増大伝達機構39の部分がコンパクトになるとともに全体としても軽量かつ低コストにすることができる。
【0100】
また、スプロケット及びチェーンは自由な配置で構成できるため、回転数増大の効果が大きく、上記特許文献2の実施の形態(回転数増大伝達機構を歯車で構成したもの)では入力レバーを約150度回動させないと駆動軸を約3.5回転させられなかったのに対して、本実施の形態2のベルトコンベヤ31においては、入力レバー8Aを僅か約13度回動させるだけで駆動軸36aを約2.8回転させることができ、入力レバーの回動角度を凡そ10分の1にすることができるという作用効果が得られる。
【0101】
さらに、本実施の形態2のベルトコンベヤ31は、電力が不要で全体としても軽量であるという長所を生かして、移動設置式のベルトコンベヤとしての用途が広がるものと考えられる。例えば、河川の堤防決壊による洪水時に、現場へ運んで設置して土嚢を搬送する等の緊急時の用途にも対応できる。
【0102】
このようにして、本実施の形態2にかかるベルトコンベヤ31においては、電力を全くしないだけでなく、より軽くより安価でよりコンパクトで、入力レバー8A・入力ペダル8Bの回動角度がより小さくても搬送ベルト34を長く送ることができる。
【0103】
さらに、本実施の形態2にかかるベルトコンベヤ31に特有の作用効果として、図2に示されるように、バランスウエイト21を正面から見て左側に配置して、入力軸8aを右側に配置することによって、入力レバー8Aまたは入力ペダル8Bを回動させると伸縮エネルギー蓄積機構を構成するコイルばね48が圧縮されて弾性エネルギーが蓄積され、入力レバー8Aまたは入力ペダル8Bを開放すると駆動ローラ36が正面から見て左回り(反時計回り)方向に回転して、搬送ベルト34が左方向に走行する。
【0104】
したがって、バランスウエイト21を正面から見て右側に配置して、入力軸8aを左側に配置するとともに、ワイヤ43を第1のプーリー42及び第2のプーリー44に逆方向に掛けかえることによって、駆動ローラ36が正面から見て右回り(時計回り)方向に回転して、搬送ベルト34が右方向に走行するので、部品を増やしたり交換したりする必要がなく、極めて容易に搬送ベルト34の走行方向を逆にすることができるという利点がある。
【0105】
なお、本実施の形態2においては、コイルばね48を中心とする伸縮エネルギー蓄積機構を駆動軸36aに直接取付けた場合について説明したが、駆動軸36aに駆動力を伝達する駆動力伝達軸を別に設けて、この駆動力伝達軸に伸縮エネルギー蓄積機構を取付けて駆動力伝達軸からベルト、ワイヤまたはチェーンを介して回転力を駆動軸36aに伝達する方式とすることもできる。
【0106】
実施の形態3
次に、本発明の実施の形態3について、図8及び図9を参照して説明する。
【0107】
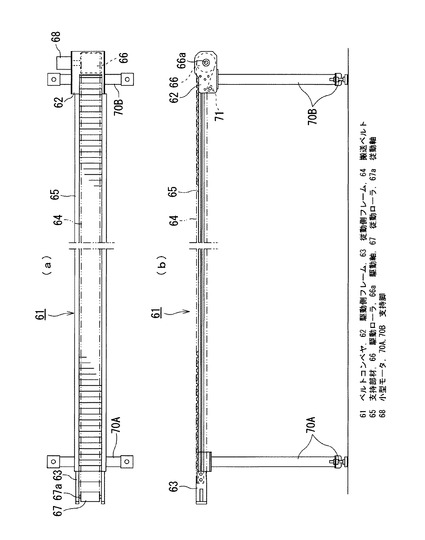
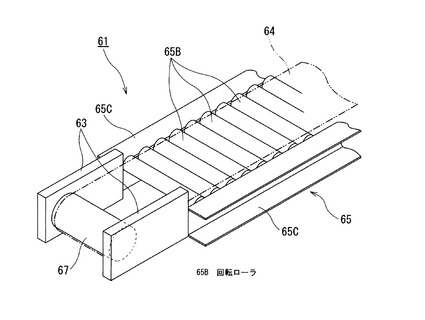
図8(a)は本発明の実施の形態3にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図、(b)は正面図である。図9は本発明の実施の形態3にかかるベルトコンベヤの従動ローラ近傍を拡大して示す斜視図である。
【0108】
図8に示されるように、本実施の形態3にかかるベルトコンベヤ61は、図示しないアルミニウム棒を間に挟んで組付けた2枚のメッキ鋼板からなる1対のフレームの一方としての駆動側フレーム62と、それと離間対向した2枚のメッキ鋼板からなる1対のフレームの他方としての従動側フレーム63と、これら1対のフレーム62,63に両端を固定された支持部材としてのローラコンベヤ65と、ローラコンベヤ65側面の1対のフレーム62,63近傍に1対ずつ取付けられた支持脚70A,70B(向う側の支持脚はそれぞれ手前側の支持脚70A,70Bに重なって図示されず)とを基本骨格として構成されている。
【0109】
駆動側フレーム62には駆動軸66aが水平に軸支され、駆動ローラ66が一体回転可能に取付けられており、同様に従動側フレーム63には従動軸67aが水平に軸支され、従動ローラ67が一体回転可能に取付けられ、これら駆動ローラ66と従動ローラ67には無端状の走行可能な搬送ベルト64が掛け渡されている。そして、図8(a)に示されるように、駆動軸66aには、小型モータとしての小型電力モータ68の回転軸が直結した状態で接続されている。
【0110】
搬送ベルト64は、駆動ローラ66と従動ローラ67との間に緊張した状態で掛け渡されているため、通常は支持部材としてのローラコンベヤ65からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルト64がその部分で撓んで、搬送ベルト64の裏面が支持部材としてのローラコンベヤ65と接触した状態となる。
【0111】
しかし、図9に示されるように、本実施の形態3にかかるベルトコンベヤ61においては、支持部材として断面コの字形の1対のレール65Cの間に複数の回転ローラ65Bを回転自在に取付けたローラコンベヤ65を用いており、ローラコンベヤ65に搬送ベルト64の搬送方向に回転する複数の回転ローラ65Bが設けられているので、搬送物の重さで搬送ベルト64の裏面が接触してもころがり摩擦となり、殆ど摩擦抵抗がないため、駆動力の小さい小型モータ68でも搬送ベルト64を高速で走行させることができる。
【0112】
ここで、本実施の形態3においては、複数の回転ローラ65Bを支持部材としてのローラコンベヤ65の全長に亘って設けているが、両端の駆動ローラ66及び従動ローラ67に近い部分は搬送ベルト64の撓みが少なくなり、ローラコンベヤ65に接触しなくなるため、より撓み易い中間付近を中心として全長でなく部分的に設けても、同様な作用効果が得られる。
【0113】
また、本実施の形態3においては、小型モータ68の回転軸を駆動ローラ66の駆動軸66aに直結させているが、これに限らず、駆動軸66aに駆動力を伝達する駆動力伝達軸に小型モータ68の回転軸を接続しても良い。
【0114】
さらに、本実施の形態3においては、駆動ローラ66の駆動軸66aを1対のフレームの一方としての駆動側フレーム62に軸支して、小型モータ68も駆動側フレーム62に取付けた場合についてのみ説明したが、1対のフレームの両方に従動ローラ67の従動軸67aを軸支して、これらの1対の従動ローラ67間に搬送ベルト64を掛け渡して、1対の従動ローラ67間において支持部材としてのローラコンベヤ65の断面コの字形の1対のレール65Cの間に駆動ローラ66の駆動軸66aを軸支して、この駆動軸66aに小型モータ68の回転軸を結合して駆動ローラ66を回転させることによって搬送ベルト64を走行させる構成としても良い。
【0115】
このようにして、本実施の形態3にかかるベルトコンベヤ61においては、搬送ベルト64の摩擦抵抗が殆どないため駆動力の小さい小型モータ68でも搬送ベルト64を高速で走行させることができる、電力を少ししか必要としない省エネルギータイプのベルトコンベヤとなる。
【0116】
本発明を実施するに際しては、ベルトコンベヤのその他の部分の構成、形状、数量、材質、大きさ、接続関係等についても、上記各実施の形態に限定されるものではない。
【0117】
なお、小型モータ68としては、回転電気子形で説明したが、回転界磁形としても使用できる。即ち、小型モータ68のシャフトを駆動側フレーム62に取り付け、回転側で直接ローラコンベヤ65を回動するようにすることができる。この場合には、全体をコンパクトに設計できる。
【産業上の利用可能性】
【0118】
本発明の実施の形態1にかかるベルトコンベヤ1は、搬送ベルト4を走行させる駆動ローラ6が取付けられた駆動軸6aと入力レバー8A及び入力ペダル8Bの一端が固定された入力軸8aとの間に回転数増大伝達機構9が設けられているため、入力レバー8Aを手で持って回動させ、または入力ペダル8Bを足で踏み込むと入力軸8aの回動が何回転にもなって駆動力伝達軸15aに伝達され、駆動力伝達軸15aに取付けられたぜんまいばね30が巻き上げられる。
【0119】
そこで手または足を離せば、ぜんまいばね30が弛緩するとともに蓄えられていた弾性力によって駆動軸6aが回転し、駆動ローラ6も一体に回転して搬送ベルト4を走行させる。そして、搬送ベルト4の走行距離は入力レバー8Aまたは入力ペダル8Bを回動させる角度と駆動軸6aの回転数の関係を予め調べておけば、自在に調節することができる。これによって、電力を用いずに必要なときに必要なだけ搬送ベルト4を走行させることができ、ぜんまいばね30の巻き上げ限界の範囲内で入力レバー8Aまたは入力ペダル8Bを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルト4を微小距離ずつ送ること(寸動送り)も容易である。
【0120】
このようにして、必要なときだけ手動でぜんまいばね30を巻いて搬送ベルト4を走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができる。
【0121】
本発明の実施の形態2にかかるベルトコンベヤ31も、弾性力蓄積手段としてぜんまいばね30の代わりにコイルばね48を用いた点が大きく異なるのみであり、入力レバー8Aを手で持って回動させ、または入力ペダル8Bを足で踏み込んで離すと、蓄えられていた弾性力によって駆動軸36aが回転し、駆動ローラ36も一体に回転して搬送ベルト34を走行させる。
【0122】
したがって、電気を使用していないことから、水周りの作業場、例えば、調理室、炎天下の農作業場、コンベヤが水中に入る水槽への搬入または水槽からの搬出に使用できる。さらには、河川の堤防の決壊による洪水等の際には、現場へ運んで設置して、堤防を修復するための土嚢を搬送するのにも使用することができる。
【0123】
また、調理室においては、調理室と配膳室との間の受け渡しにも、絶縁変圧器等の絶縁性を高める防水構造の配線が不要となるから、ベルトコンベヤが廉価となる。また、駆動しないときには、全くエネルギーを使用していないから、常に連続運転する従来のベルトコンベヤと相違するので、省エネ効果がある。
【0124】
そして、薬局等の調合室と受け渡し場所間の搬送、クリーンルームと外部との受け渡し、野菜・果物の選果場での選果作業と選果後の搬送、勿論、部品組立工場の人海作業からメインコンベヤへの受け渡し、グループ単位の部品等の組み立てと搬送、函詰単位の搬送等に使用することができる。
【図面の簡単な説明】
【0125】
【図1】図1(a)は本発明の実施の形態1にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図、(b)は正面図である。
【図2】図2は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を正面側から見て示す縦断面図である。
【図3】図3は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を右側面側から見て示す縦断面図である。
【図4】図4は本発明の実施の形態1の変形例にかかるベルトコンベヤの従動ローラ近傍を拡大して示す斜視図である。
【図5】図5は本発明の実施の形態2にかかるベルトコンベヤの全体構成を第3のフレームの手前側フレーム板を外し、かつ中間部分を省略して示す側面図である。
【図6】図6は本発明の実施の形態2にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図である。
【図7】図7(a)は本発明の実施の形態2にかかるベルトコンベヤの駆動部分の構成を示す平面図、(b)は側面図である。
【図8】図8(a)は本発明の実施の形態3にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図、(b)は正面図である。
【図9】図9は本発明の実施の形態3にかかるベルトコンベヤの従動ローラ近傍を拡大して示す斜視図である。
【符号の説明】
【0126】
1,1A,31,61 ベルトコンベヤ
2,32,62 駆動側フレーム
3,33,63 従動側フレーム
4,34,64 搬送ベルト
5,5A,35A,65 支持部材
5B,65B 回転ローラ
6,36,66 駆動ローラ
6a,36a,66a 駆動軸
7,37,67 従動ローラ
7a,67a 従動軸
8a 入力軸
8A 入力レバー
8B 入力ペダル
9,39 回転数増大伝達機構
10A,10B,40,41,70A,70B 支持脚
15,18,19,23 スプロケット
15a 駆動力伝達軸
17,20,22 チェーン
26 ワンウェイクラッチ
30 ぜんまいばね
42 第1のプーリー
43 ワイヤ
44 第2のプーリー
45 フランジ付きガイド
45a フランジ
46 長いロッド
47 ばねホルダ
48 コイルばね
68 小型モータ
【技術分野】
【0001】
本発明は、搬送ベルトの摩擦が殆どないため小さい駆動力で搬送ベルトを高速で走行させることができる省エネルギータイプのベルトコンベヤに関するものである。
【背景技術】
【0002】
従来のベルトコンベヤは、一般に無端状の搬送ベルトを備え、この搬送ベルトは電動モータ或いは空気圧モータによって回転される駆動ローラによって走行させられ、搬送ベルトの上面に載置されたワークを搬送するものである。例えば、特許文献1に開示された特許発明にかかるベルトコンベヤにおいては、搬送ベルトの損傷を小さくする工夫がなされているが、モータを内蔵した駆動ローラや減速機付きモータに接続された駆動ローラ等によって搬送ベルトを駆動している。
【特許文献1】特許第3058637号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ここで、搬送ベルトは駆動ローラ及び従動ローラに緊張した状態で掛けられており、通常は搬送ベルトの裏面を支持する支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルトがその部分で撓んで、搬送ベルトの裏面が支持部材と接触した状態となる。この状態で搬送ベルトを走行させると、搬送ベルトの裏面が支持部材と摩擦しながら移動することになり、搬送ベルトの裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルトの裏面が摩耗してしまう。
【0004】
それとともに、搬送ベルトの摩擦抵抗に抗して搬送ベルトを走行させるためには駆動力の大きい電動モータ或いは空気圧モータを用いなければならず、ベルトコンベヤの装置全体が大型になるとともに重量が大きくなり、さらには消費電力が大きくなってしまうという問題点があった。
【0005】
そこで、本発明は、支持部材に回転ローラを設けることによって搬送ベルトの摩擦抵抗を殆どなくすることができ、小さい駆動力で搬送ベルトを高速で走行させることができる省エネルギータイプのベルトコンベヤを提供することを課題とするものである。
【課題を解決するための手段】
【0006】
請求項1の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームの一方(駆動側フレーム)に軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、前記1対のフレームの他方(従動側フレーム)に軸支された従動軸に一体回転可能に取付けられた従動ローラと、前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材とを具備し、前記支持部材には全長に亘ってまたは前記支持部材の中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているものである。
【0007】
請求項2の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームの一方(駆動側フレーム)に軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、前記1対のフレームの他方(従動側フレーム)に軸支された従動軸に一体回転可能に取付けられた従動ローラと、前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、前記駆動ローラの駆動軸または前記駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、前記支持部材には全長に亘ってまたは前記支持部材の中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているものである。
【0008】
請求項3の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、前記1対のフレームの両方に軸支された1対の従動軸に一体回転可能に取付けられた1対の従動ローラと、前記1対の従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、前記1対の従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、前記1対の従動ローラの間において、前記支持部材に軸支された駆動軸に一体回転可能に取付けられ前記搬送ベルトを走行させる駆動ローラと、前記駆動ローラの駆動軸または前記駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、前記支持部材には前記駆動ローラが軸支された部分を除く全長に亘ってまたは前記1対の従動ローラ及び前記駆動ローラの中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているものである。
【発明の効果】
【0009】
請求項1の発明にかかるベルトコンベヤは、駆動側フレームに軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、従動側フレームに軸支された従動軸に一体回転可能に取付けられた従動ローラと、駆動ローラと従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、駆動ローラと従動ローラの間において、搬送ベルトの下方向への移動を制限し、搬送ベルトの裏面を支持する支持部材とを具備し、支持部材には全長に亘ってまたは支持部材の中間付近を中心として搬送ベルトが接触しても摩擦力が掛からないように搬送ベルトの搬送方向に回転する複数の回転ローラが設けられている。
【0010】
通常、搬送ベルトは駆動ローラ及び従動ローラに緊張した状態で掛けられており、支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルトがその部分で撓んで、搬送ベルトの裏面が支持部材と接触した状態となる。この状態で搬送ベルトを走行させると、搬送ベルトの裏面が支持部材と摩擦しながら移動することになり、搬送ベルトの表面には搬送物が滑らないように滑り難い素材を、搬送ベルトの裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルトの裏面には大きな摩擦抵抗が掛かる。
【0011】
しかし、本発明にかかるベルトコンベヤにおいては、支持部材に搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているので、搬送物の重さで搬送ベルトの裏面が接触してもころがり摩擦となり、殆ど摩擦抵抗を受けないため、小さな駆動力で搬送ベルトを高速で走行させることができる。
【0012】
ここで、複数の回転ローラは支持部材の全長に亘って設けても良いが、両端の駆動ローラ及び従動ローラに近い部分は搬送ベルトの撓みが少なくなり、支持部材に接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても効果がある。
【0013】
このようにして、支持部材に回転ローラを設けることによって搬送ベルトの摩擦抵抗を殆どなくすることができ、小さい駆動力で搬送ベルトを高速で走行させることができる省エネルギータイプのベルトコンベヤとなる。
【0014】
請求項2の発明にかかるベルトコンベヤは、駆動側フレームに軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、従動側フレームに軸支された従動軸に一体回転可能に取付けられた従動ローラと、駆動ローラと従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、駆動ローラと従動ローラの間において、搬送ベルトの下方向への移動を制限し、搬送ベルトの裏面を支持する支持部材と、駆動ローラの駆動軸または駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、支持部材には全長に亘ってまたは支持部材の中間付近を中心として搬送ベルトが接触しても摩擦力が掛からないように搬送ベルトの搬送方向に回転する複数の回転ローラが設けられている。
【0015】
通常、搬送ベルトは駆動ローラ及び従動ローラに緊張した状態で掛けられており、支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルトがその部分で撓んで、搬送ベルトの裏面が支持部材と接触した状態となる。この状態で搬送ベルトを走行させると、搬送ベルトの裏面が支持部材と摩擦しながら移動することになり、搬送ベルトの表面には搬送物が滑らないように滑り難い素材を、搬送ベルトの裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルトの裏面には大きな摩擦抵抗が掛かる。
【0016】
しかし、本発明にかかるベルトコンベヤにおいては、支持部材に搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているので、搬送物の重さで搬送ベルトの裏面が接触してもころがり摩擦となり、殆ど摩擦抵抗を受けないため、駆動力の小さい小型モータでも搬送ベルトを高速で走行させることができる。
【0017】
ここで、複数の回転ローラは支持部材の全長に亘って設けても良いが、両端の駆動ローラ及び従動ローラに近い部分は搬送ベルトの撓みが少なくなり、支持部材に接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても同様の作用効果が得られる。
【0018】
このようにして、支持部材に回転ローラを設けることによって搬送ベルトの摩擦抵抗を殆どなくすることができ、消費電力の少ない小型モータの小さい駆動力でも搬送ベルトを高速で走行させることができる省エネルギータイプのベルトコンベヤとなる。
【0019】
請求項3の発明にかかるベルトコンベヤは、互いに離間対向した1対のフレームと、1対のフレームの両方に軸支された1対の従動軸に一体回転可能に取付けられた1対の従動ローラと、1対の従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、1対の従動ローラの間において、搬送ベルトの下方向への移動を制限し、搬送ベルトの裏面を支持する支持部材と、1対の従動ローラの間において、支持部材に軸支された駆動軸に一体回転可能に取付けられ搬送ベルトを走行させる駆動ローラと、駆動ローラの駆動軸または駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、支持部材には駆動ローラが軸支された部分を除く全長に亘ってまたは1対の従動ローラ及び駆動ローラの中間付近を中心として搬送ベルトが接触しても摩擦力が掛からないように搬送ベルトの搬送方向に回転する複数の回転ローラが設けられている。
【0020】
本発明にかかるベルトコンベヤと請求項2の発明にかかるベルトコンベヤとの相違点は、駆動ローラ及び小型モータを1対のフレームの間に設けたことである。その他の部分については同様の構成を有しているため、本発明にかかるベルトコンベヤにおいても、支持部材に搬送ベルトの搬送方向に回転する複数の回転ローラが設けられているので、搬送物の重さで搬送ベルトの裏面が接触してもころがり摩擦となり、殆ど摩擦抵抗がないため、駆動力の小さい小型モータでも搬送ベルトを高速で走行させることができる。
【0021】
ここで、複数の回転ローラは駆動ローラが軸支された部分を除く支持部材の全長に亘って設けても良いが、両端の従動ローラ及び駆動ローラに近い部分は搬送ベルトの撓みが少なくなり、支持部材に接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても同様の作用効果が得られる。
【0022】
このようにして、搬送ベルトの摩擦抵抗が殆どないため駆動力の小さい小型モータで搬送ベルトを走行させることができる、電力を少ししか必要としない省エネルギータイプのベルトコンベヤとなる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照しつつ説明する。
【0024】
実施の形態1
まず、本発明の実施の形態1について、図1乃至図4を参照して説明する。
【0025】
図1(a)は本発明の実施の形態1にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図、(b)は正面図である。図2は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を正面側から見て示す縦断面図である。図3は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を右側面側から見て示す縦断面図である。図4は本発明の実施の形態1にかかるベルトコンベヤの従動ローラ近傍を拡大して示す斜視図である。
【0026】
図1に示されるように、本実施の形態1にかかるベルトコンベヤ1は、図示しないアルミニウム棒を間に挟んで組付けた2枚のメッキ鋼板からなる1対のフレームの一方としての駆動側フレーム2と、それと離間対向した2枚のメッキ鋼板からなる1対のフレームの他方としての従動側フレーム3と、これら1対のフレーム2,3に両端を固定された支持部材としてのローラコンベヤ5と、ローラコンベヤ5側面の1対のフレーム2,3近傍に1対ずつ取付けられた支持脚10A,10B(向う側の支持脚はそれぞれ手前側の支持脚10A,10Bに重なって図示されず)とを基本骨格として構成されている。
【0027】
駆動側フレーム2には駆動軸6aが水平に軸支され、駆動ローラ6が一体回転可能に取付けられており、同様に従動側フレーム3には従動軸7aが水平に軸支され、従動ローラ7が一体回転可能に取付けられ、これら駆動ローラ6と従動ローラ7には無端状の走行可能な搬送ベルト4が掛け渡されている。
【0028】
駆動軸6aと、駆動側フレーム2に同じく水平に軸支された入力軸との間には、後述する回転数増大伝達機構9が駆動側フレーム2内に設けられており、入力軸に図示しないリンク部材を介して固定された入力レバー8Aを手で持って回動させるか、入力軸に図示しないリンク部材を介して固定された入力ペダル8Bを足で踏んで回動させることによって、駆動軸6aに駆動力を伝達する駆動力伝達軸に駆動側フレーム2の向う側において取付けられている図示しないぜんまいばねが巻き上げられるようになっている。
【0029】
入力レバー8A(図1(a)では図示省略されている)が取付けられているリンクは、図1(b)においては回転数増大伝達機構9内の図示しない上部ストッパーに当接しており、入力レバー8Aがこの位置にあるときに、図示しないぜんまいばねは最も弛緩した状態になっている。この原点位置から、作業者が入力レバー8Aの先端のグリップ部を握って、図1(b)の紙面に垂直な方向に手前側に約13度回動させると、回転数増大伝達機構9の作用によって駆動力伝達軸は約2.1回転して、ぜんまいばねも約2.1回転分巻き上げられて弾性エネルギーを蓄積する。
【0030】
また、図1(a),(b)に示されるように、入力レバー8Aが取付けられているリンクには入力ペダル8Bも取付けられており、この入力ペダル8Bをリンクが回転数増大伝達機構9内の図示しない下部ストッパーに当接するまで踏み込むことによって、リンクは入力レバー8Aを約13度回動させたのと同じだけ回動して、回転数増大伝達機構9の作用によって駆動力伝達軸は約2.1回転して、ぜんまいばねも約2.1回転分巻き上げられて弾性エネルギーを蓄積する。
【0031】
このように本実施の形態1にかかるベルトコンベヤ1においては、入力レバー8Aを約13度回動させるだけで、ぜんまいばねを約2.1回転分巻き上げることができ、入力レバー8A,入力ペダル8Bの回動角度がより小さくても搬送ベルト4を長く送ることができる。
【0032】
なお、ぜんまいばねを約3.5回転分巻き上げると弾性エネルギーを最大限蓄積することができるが、ぜんまいばねを毎回最大限まで巻き上げているとぜんまいばねの寿命が短くなることと、巻き上げるのに必要な力が大きくなることから、本実施の形態1においてはぜんまいばねを約2.1回転分、即ち最大限の6割だけ巻き上げることとして、ぜんまいばねの寿命を長く保つとともに巻き上げるのに必要な力が小さくて済むようにしている。
【0033】
また、図1(a)に示されるように、支持部材としてのローラコンベヤ5の幅は搬送ベルト4の幅より広いため、ローラコンベヤ5の側面は搬送ベルト4から突出しており、支持脚10Aはローラコンベヤ5の側面に直接取付けることができる。但し、ローラコンベヤ5の幅で真っ直ぐ降ろしたのでは幅が狭くて安定性が悪いので、まず固定板をローラコンベヤ5の側面中央の溝に固定ボルトで固定して、固定板の下端の脚部は紙面に垂直な面内において傾斜させて外側へ拡がるようにし、脚部の下端は水平に曲げて接地シャフト及び接地ゴムをナットで固定して支持脚10Aが構成されている。
【0034】
これによって、図1(a)の平面図に示されるように、支持脚10Aはローラコンベヤ5の側面から左右に拡がって接地し、充分な安定性を持って搬送ベルト4を所定の高さに支持することができる。なお、支持部材としてのローラコンベヤ5は、駆動側フレーム2には左右4本ずつ計8本の固定ボルトによって締付け固定され、従動側フレーム3には左右2本ずつ計4本の固定ボルトによって締付け固定されている。
【0035】
次に、回転数増大伝達機構9の詳細な構成について、図2及び図3を参照して説明する。図2及び図3に示されるように、駆動側フレーム2の2枚のメッキ鋼板の間には、駆動ローラ6が、駆動側フレーム2に2個のボールベアリング軸受け27によって水平に軸支された駆動軸6aに、ワンウェイクラッチ26を介して一体回転可能に取付けられている。駆動ローラ6の内部には、慣性を増すために全周に亘って図示しない重りが取付けられており、駆動ローラ6の外周には搬送ベルト4が掛けられている。
【0036】
駆動軸6aの奥側には、駆動ローラ6と並んで駆動プーリー12が一体回転可能に取付けられており、この駆動プーリー12には、下方のフレームに2個のボールベアリング軸受け27によって水平に軸支された駆動力伝達軸15aに一体回転自在に取付けられたぜんまいプーリー14との間に、丸ベルト13が掛け渡されている。丸ベルト13にはテンションプーリー16が押し付けられており、丸ベルト13の駆動プーリー12とぜんまいプーリー14への掛け渡しを容易にしつつ、駆動力伝達軸15aから駆動軸6aへ駆動力が無駄なく伝達されるように丸ベルト13にテンションがかけられている。
【0037】
そして、図3に示されるように、駆動力伝達軸15aには、ぜんまいばね30が巻上げ・弛緩可能に取付けられている。このぜんまいばね30は、図2において駆動力伝達軸15aが右回り方向(時計回り方向)に回転する場合には弾性力に抗して巻き上げられて弾性エネルギーを蓄積し、駆動力伝達軸15aが左回り方向(反時計回り方向)に回転する場合には弛緩して、弾性エネルギーを放出する。
【0038】
さらに、図3に示されるように、駆動力伝達軸15aには、ぜんまいばね30とぜんまいプーリー14との間に小スプロケット16が一体回転可能に取付けられており、この小スプロケット16には、下方に2個のボールベアリング軸受け27によって水平に軸支された回転軸18aに一体回転可能に取付けられた大スプロケット18との間に、チェーン17が掛け渡されている。
【0039】
また、回転軸18aには小スプロケット19が一体回転可能に取付けられており、この小スプロケット19にはチェーン20が掛けられており、図2に示されるように、チェーン20の一方の端には円柱状のバランスウエイト21が上下方向にスライド可能に固定されている。また、チェーン20の他方の端には90度捻られた方向にチェーン22が接続されており、このチェーン22は、図3に示されるように、リンク24の先端に回転自在に取付けられたスプロケット23に掛けられて、下方のフレームの底面にその先端が固定されている。
【0040】
リンク24の後端は、支持脚10Bを構成するフレームに回転軸24aによって回転自在に軸支されており、さらに、スプロケット23の回転軸23aには、接続部材25を介して入力リンク8Cが支持脚10Bを構成するフレームに入力軸8aによって回転自在に軸支されている。入力リンク8Cの先端近傍には、想像線で示されるように入力レバー8Aが接続されており、また図3に示されるように、入力ペダル8Bが固定されている。
【0041】
そして、図2に示されるように、支持脚10Bを構成するフレーム内にリンク24の回動を規制する一組の上下ストッパー28を設けたことによって、入力レバー8Aは一定範囲(本実施の形態1においては約13度)しか回動せず、入力ペダル8Bは一定範囲(本実施の形態1においては約100mm)しか踏み込むことができない。これによって、ぜんまいばね30の巻き過ぎを確実に防止するとともに、搬送ベルト4の搬送距離を(ぜんまいばね30の巻上げ数を約2.1回転とすることによって)規定している。
【0042】
なお、本実施の形態1にかかるベルトコンベヤ1においては、入力レバー8Aと入力ペダル8Bが共に備えられた構成として、作業者が入力レバー8Aを手で回動させてベルトコンベヤ1を作動させるか、入力ペダル8Bを足で踏んでベルトコンベヤ1を作動させるかを自由に選択できるようにしているが、入力レバー8Aか入力ペダル8Bかいずれか一方のみを備えた構成としても良い。
【0043】
次に、本実施の形態1にかかるベルトコンベヤ1の支持部材としてのローラコンベヤ5について、図4を参照して説明する。
【0044】
図4に示されるように、本実施の形態1にかかるベルトコンベヤ1においては、搬送ベルト4の支持部材として、断面コの字形の1対のレール5Cの間に複数の回転ローラ5Bを回転自在に取付けたローラコンベヤ5を使用している。
【0045】
通常、搬送ベルト4は駆動ローラ6及び従動ローラ7に緊張した状態で掛けられており、支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルト4がその部分で撓んで、搬送ベルト4の裏面が支持部材と接触した状態となる。この状態で搬送ベルト4を走行させると、搬送ベルト4の裏面が支持部材と摩擦しながら移動することになり、搬送ベルト4の裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルト4の裏面が摩耗してしまう。
【0046】
しかし、本実施の形態1にかかるベルトコンベヤ1においては、支持部材としてのローラコンベヤ5に搬送ベルト4の搬送方向に回転する複数の回転ローラ5Bが設けられているので、搬送物の重さで搬送ベルト4の裏面が接触してもころがり摩擦となり、殆ど摩耗しなくて済むため、搬送ベルト4の寿命を著しく延ばすことができる。また、搬送ベルト4に掛かる抵抗が少なくなるため、同じ駆動エネルギーを掛けた場合には、走行距離がより伸びることになる。
【0047】
ここで、本実施の形態1においては、複数の回転ローラ5Bを支持部材5の全長に亘って設けているが、両端の駆動ローラ6及び従動ローラ7に近い部分は搬送ベルト4の撓みが少なくなり、支持部材5に接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても効果がある。
【0048】
このようにして、本実施の形態1にかかるベルトコンベヤ1においては、電力を全く必要としないだけでなく、より軽くより安価でよりコンパクトで、入力レバー8A・入力ペダル8Bの回動角度がより小さくても搬送ベルト4をより長く送ることができるとともに搬送ベルト4の寿命を延ばすことができる。
【0049】
このような構成を有する本実施の形態1にかかるベルトコンベヤ1の作動原理について、図1乃至図3を参照して説明する。初期状態においては、前述したバランスウエイト21の重さによってチェーン20及びチェーン22を介してスプロケット23が引き上げられ、リンク24は一組の上下ストッパー28のうち上方ストッパー28に当接して止まった状態になっている。
【0050】
この状態から、作業者が入力レバー8Aを手で回動させ或いは入力ペダル8Bを足で踏むことによって、リンク24は下方ストッパー28に当接するまで回動して、スプロケット23が下降する(入力ペダル8Bが約100mm下降することによってスプロケット23は約45mm下降する)のに伴ってチェーン22及びチェーン20を介して、バランスウエイト21の重さに抗して小スプロケット19が図2において(即ち、正面から見て)右回り(時計回り)方向に約0.7回転し、回転軸18aに一体回転可能に取付けられた大スプロケット18も同じく右回り(時計回り)方向に約0.7回転する。
【0051】
この回転は、チェーン17によって小スプロケット15に伝達されるが、小スプロケット15の歯数は大スプロケット18の歯数の3分の1であるため、大スプロケット18が約0.7回転することによって小スプロケット15は右回り(時計回り)方向に約2.1回転して、駆動力伝達軸15aも右回り(時計回り)方向に約2.1回転するため、駆動力伝達軸15aに取付けられたぜんまいばね30も約2.1回転分巻き上げられる。
【0052】
ここで、駆動力伝達軸15aが正面から見て右回り(時計回り)方向に約2.1回転するのに伴って、駆動力伝達軸15aに固定されたぜんまいプーリー14も右回り(時計回り)方向に約2.1回転し、この回転は丸ベルト13によって駆動プーリー12に伝達されて、駆動軸6aが(ぜんまいプーリー14の直径が駆動プーリー12の直径の約1.5倍であるため)右回り(時計回り)方向に約3.2回転するが、駆動ローラ6はワンウェイクラッチ26を介して駆動軸6aに取付けられているため、駆動軸6aが正面から見て右回り(時計回り)方向に回転しても駆動ローラ6は回転せず、したがって搬送ベルト4も移動することはない。
【0053】
これによって、ぜんまいばね30を巻き上げるのに余分な力を必要とせず、またぜんまいばね30を巻き上げる際に搬送ベルト4が逆走するという不具合も起きることがない。
【0054】
このようにぜんまいばね30を巻き上げて弾性エネルギーを蓄えた状態で、作業者が入力レバー8A或いは入力ペダル8Bを開放すると、バランスウエイト21の重量及びぜんまいばね30の弾性エネルギーが相俟って、入力レバー8A及び入力ペダル8Bが原点に復帰するとともに、リンク24が先端に取付けられたスプロケット23が上昇する方向に回動し、小スプロケット19が正面から見て左回り(反時計回り)方向に約0.7回転し、回転軸18aに一体回転可能に取付けられた大スプロケット18も同じく左回り(反時計回り)方向に約0.7回転する。
【0055】
この回転は、チェーン17によって小スプロケット15に伝達され、小スプロケット15の歯数が大スプロケット18の歯数の3分の1であるため、大スプロケット18が約0.7回転することによって小スプロケット15は正面から見て左回り(反時計回り)方向に約2.1回転して、駆動力伝達軸15aも左回り(反時計回り)方向に約2.1回転するため、ぜんまいプーリー14も左回り(反時計回り)方向に約2.1回転する。
【0056】
この回転は、丸ベルト13によって駆動プーリー12に伝達されて、駆動軸6aが左回り(反時計回り)方向に約3.2回転するため、ワンウェイクラッチ26が噛み合って、駆動ローラ6も正面から見て左回り(反時計回り)方向に回転して、これによって搬送ベルト4が従動ローラ7方向に走行する。ここで、前述の如く、駆動ローラ6の内部には慣性を増すために全周に亘って重りが取付けられているため、駆動ローラ6は約3.2回転以上回転して、搬送ベルト4をより長距離走行させて、搬送ベルト4に載置された搬送物をより長距離搬送することができる。
【0057】
また、作業者が入力レバー8A或いは入力ペダル8Bを少しずつ元に戻すことによって、搬送ベルト4を少しずつ走行させて、搬送ベルト4に載置された搬送物を少しずつ搬送すること(寸動送り)も容易にできる。
【0058】
このように、本実施の形態1にかかるベルトコンベヤ1においては、回転数増大伝達機構9をスプロケット15,18,19,23及びチェーン17,20,22、並びにプーリー12,14と丸ベルト13で構成したために、僅かな部品点数と自由な配置で構成することができ、かつスプロケット及びチェーンやプーリーと丸ベルトは歯車よりも軽量でしかも安価であるため、ベルトコンベヤ1としても回転数増大伝達機構9の部分がコンパクトになるとともに全体としても軽量かつ低コストにすることができる。
【0059】
また、スプロケット及びチェーンは自由な配置で構成できるため、回転数増大の効果が大きく、上記特許文献2の実施の形態(回転数増大伝達機構を歯車で構成したもの)では入力レバーを約150度回動させないとぜんまいばねを約3.5回転分巻き上げられなかったのに対して、本実施の形態1のベルトコンベヤ1においては、入力レバー8Aを僅か約13度回動させるだけでぜんまいばね30を約2.1回転分巻き上げることができ、入力レバーの回動角度を凡そ10分の1にすることができるという作用効果が得られる。
【0060】
さらに、本実施の形態1のベルトコンベヤ1は、電力が不要で全体としても軽量であるという長所を生かして、移動設置式のベルトコンベヤとしての用途が広がるものと考えられる。例えば、河川の堤防決壊による洪水時に、現場へ運んで設置して土嚢を搬送する等の緊急時の用途にも対応できる。
【0061】
このようにして、本実施の形態1にかかるベルトコンベヤ1においては、電力を全くしないだけでなく、より軽くより安価でよりコンパクトで、入力レバー8A・入力ペダル8Bの回動角度がより小さくても搬送ベルト4を長く送ることができる。
【0062】
さらに、本実施の形態1にかかるベルトコンベヤ1の特有の作用効果として、図2に示されるように、バランスウエイト21を正面から見て左側に配置して、入力軸8aを右側に配置することによって、入力レバー8Aまたは入力ペダル8Bを回動させるとぜんまいばね30が正面から見て右回り(時計回り)方向に巻き上げられて弾性エネルギーが蓄積され、入力レバー8Aまたは入力ペダル8Bを開放すると駆動ローラ6が正面から見て左回り(反時計回り)方向に回転して、搬送ベルト4が左方向に走行する。
【0063】
したがって、バランスウエイト21を正面から見て右側に配置して、入力軸8aを左側に配置するとともに、ぜんまいばね30を逆向きに取付けることによって、駆動ローラ6が正面から見て右回り(時計回り)方向に回転して、搬送ベルト4が右方向に走行するので、部品を増やしたり交換したりする必要がなく、極めて容易に搬送ベルト4の走行方向を逆にすることができるという利点がある。
【0064】
なお、本実施の形態1においては、ぜんまいばね30を駆動軸6aに駆動力を伝達する駆動力伝達軸15aに取付けた場合について説明したが、ぜんまいばね30を駆動軸6aに直接取付けることもできる。
【0065】
実施の形態2
次に、本発明の実施の形態2について、図5乃至図7を参照して説明する。
【0066】
図5は本発明の実施の形態2にかかるベルトコンベヤの全体構成を駆動側フレームの一部を構成する第3のフレームの手前側フレーム板を外し、かつ中間部分を省略して示す側面図である。図6は本発明の実施の形態2にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図である。図7(a)は本発明の実施の形態2にかかるベルトコンベヤの駆動部分の構成を示す平面図、(b)は側面図である。
【0067】
なお、本発明の実施の形態2にかかるベルトコンベヤの回転数増大伝達機構39の構成は、一部を除いて実施の形態1のベルトコンベヤ1の回転数増大伝達機構9の構成と同様であるため、一部を図示して説明し、同一の部分については図示及び説明を省略する。
【0068】
図5に示されるように、本実施の形態2にかかるベルトコンベヤ31は、支持部材を間に挟んで組付けた第2のフレームとしての従動側フレーム33と、それと離間対向した、第3のフレームと中間のフレーム板を共用する第1のフレームとからなる全体が図示されない駆動側フレーム32と、駆動側フレーム32に軸支された駆動軸36aに一体回転可能に取付けられた駆動ローラ36と、従動側フレーム33に軸支された従動軸に一体回転可能に取付けられた従動ローラ37と、駆動ローラ36と従動ローラ37に掛け渡された無端状の走行可能な搬送ベルト34を中心として構成されている。
【0069】
さらに、これら1対の全体が図示されない駆動側フレーム32と従動側フレーム33に両端を固定された支持部材としての図示されないローラコンベヤには、搬送ベルト34の両側面をカバーするように両側面に突出した断面コの字形のパネル35が、駆動側フレーム32と従動側フレーム33の間に亘ってネジ止めされている。
【0070】
この断面コの字形のパネル35には、コの字形パネル35の底面左端と駆動側フレーム32の一部を構成する第3のフレームの右端に、搬送ベルト34を必要な高さに支持するための支持脚40,41がそれぞれ取付けられている。安定を保つために、支持脚40の脚部本体40Aの下端には紙面に垂直方向に伸びるコの字形部材40Bが固定され、コの字形部材40Bの手前側と向う側にはそれぞれ支持底40Cが固定されている。
【0071】
一方、右側の支持脚41は、駆動側フレーム32の下方に接続された回転数増大伝達機構39のフレームの下に設けられており、重量のある駆動側フレーム32及び回転数増大伝達機構39を支持するため、図6の平面図で示されるように、H字形の底面脚部が設けられている。
【0072】
駆動側フレーム32の一部を構成する第3のフレーム(手前側フレーム板32Cと中間フレーム板32Bとからなる)の中間フレーム板32Bにはフランジ付きガイド45が搬送ベルト34と平行に固定され、フランジ付きガイド45には長いロッド46が嵌合して搬送ベルト34と平行方向にガタツキなくスライドする。この長いロッド46の左端には、ばねホルダ47が固定されており、フランジ付きガイド45のフランジ45aとばねホルダ47の間には、コイルばね48が長いロッド46を取り巻いて取付けられている。
【0073】
一方、長いロッド46の右端には第1のプーリー42が回転自在に取付けられ、駆動側フレーム32の一部を構成する第3のフレームの中間フレーム板32Bには丈夫でかつ柔軟なワイヤ43の一端が固定され、第1のプーリー42に掛けられてから、第3のフレーム内に突出した駆動軸36aに一体回転自在に固定された第2のプーリー44に巻き付けられて、この第2のプーリー44にワイヤ43の他端が固定されている。
【0074】
さらに、駆動側フレーム32の右端には、回転数増大伝達機構39の一部を収納する下方フレームが駆動側フレーム32を支持するように設けられており、さらにこの下方フレームは駆動側の支持脚41の一部を構成する支持フレームによって支持されている。この支持フレーム内にも、回転数増大伝達機構39の一部が収納されており、支持フレームの下方には、実施の形態1と同様の入力軸8aが駆動軸36aと離して駆動軸36aと同じく水平に軸支されている。
【0075】
この入力軸8aには、実施の形態1と同様の入力リンク8Cを介して、実施の形態1と同様の入力レバー8A及び入力ペダル8Bが一体に回動可能に固定されている。そして、入力軸8aと駆動軸36aとの間には、入力軸8aの回転を駆動軸36aに回転数を増大して伝達する回転数増大伝達機構39が設けられている。
【0076】
次に、図6の平面図を参照して、本実施の形態2にかかるベルトコンベヤ31についてさらに詳細に説明する。
【0077】
図6に示されるように、駆動側フレーム32の中間フレーム板32Bの向う側には、中間フレーム板32Bとの間で駆動軸36aを水平に軸支する第1のフレームの外側フレーム板32Aが設けられており、駆動軸36aには駆動ローラ36が一体回転可能に取付けられている。第1のフレーム(外側フレーム板32Aと中間フレーム板32Bの一部とからなる)とこれに離間対向して設けられた第2のフレーム33との間には、搬送ベルト34の上側を支持するための支持部材としてのローラコンベヤ35Aが架け渡されて、駆動側フレーム32の一部を構成する第1のフレームと従動側フレームとしての第2のフレーム33にそれぞれ固定されている。
【0078】
そして、駆動ローラ36と従動ローラ37には無端状の搬送ベルト34が張った状態で掛け渡されており、後述するように入力レバー8Aまたは入力ペダル8Bを操作することによって、白い矢印の方向へ高速で移動して搬送ベルト34の上に載置された製品等を搬送する。また、前述の如く、コの字形パネル35の底面左端には搬送ベルト34を必要な高さに支持するための支持脚40が取付けられている。安定を保つために、この支持脚40の支持脚本体40Aの下端にはコの字形部材40Bが固定され、コの字形部材40Bの両端にはそれぞれ支持底40Cが固定されている。
【0079】
次に、本実施の形態2にかかるベルトコンベヤ31の駆動機構について、図7を参照してさらに説明する。
【0080】
図7(a),(b)に示されるように、フランジ付きガイド45のフランジ45aにはブラケット45bが一体になっており、このブラケット45bにおいて、中間フレーム板32Bに4本のネジでネジ止めされている。また、図7(a)に示されるように、外側フレーム板32Aと中間フレーム板32Bの間には補助ローラ49が回転自在に軸支されており、この補助ローラ49は図7(b)に示されるように、搬送ベルト34の張りを一段と強くし、且つ搬送ベルト34の下側を従動ローラ37までの間、搬送ベルト34の上側とほぼ平行にし、見栄えを良くしたものである。
【0081】
また、コイルばね48が実線で示される圧縮された状態から想像線で示される伸びた状態となり、長いロッド46が実線で示される位置から想像線で示される位置まで高速でスライドする際に、ばねホルダ47が第3のフレーム32の左端に衝突する衝撃を緩和するために、ゴム製のストッパー47aが設けられている。
【0082】
さらに、この際に第2のプーリー44が高速回転して巻き取られていたワイヤ43が波打って第2のプーリー44から外れるのを防ぐために、第2のプーリー44の近傍にワイヤ抑え44aが固定されている。このワイヤ抑え44aには端面に深い溝が切ってあり、ワイヤ43はこの溝の中を通っている。ワイヤ43の一端はワイヤ止め43aに強固に固定されており、第1のプーリー42に掛けられた後、前記ワイヤ抑え44aの深い溝の中を通って第2のプーリー44に巻き付けられ、ワイヤ43の他端は第2のプーリー44に強固に固定されている。
【0083】
一方、駆動側フレーム32の一部を構成する第3のフレーム内に突出した駆動軸36aに固定されている第2のプーリー44の向こう側には、やはり駆動軸36aと一体に回転する小径のスプロケット50が固定されており、この小スプロケット50には、実施の形態1と同様に下方フレームに軸支された回転軸18aと一体に回転する大径のスプロケット18との間に、チェーン51が掛けられている。この回転軸18aには、やはり一体に回転する小径のスプロケット19が固定されており、この小スプロケット19には実施の形態1と同様にチェーン20が掛けられている。
【0084】
以下の構成は、図2及び図3の下半分に示される実施の形態1と同様であるので、図示及び説明を省略する。即ち、本実施の形態2にかかる回転数増大伝達機構39と実施の形態1にかかる回転数増大伝達機構9との違いは、大スプロケット18に掛けられているチェーン51が、駆動力伝達軸に固定されたスプロケットではなく、駆動軸36aに固定されたスプロケット50に直接掛けられている点にある。
【0085】
次に、本実施の形態2にかかるベルトコンベヤ31の支持部材としてのローラコンベヤ35Aについて、図4を参考にしながら説明する。
【0086】
図4に示される実施の形態1にかかるベルトコンベヤ1と同様に、本実施の形態2にかかるベルトコンベヤ31においても、搬送ベルト34の支持部材として、断面コの字形の1対のレール35Cの間に複数の回転ローラ35Bを回転自在に取付けたローラコンベヤ35Aを使用している。
【0087】
通常、搬送ベルト34は駆動ローラ36及び従動ローラ37に緊張した状態で掛けられており、支持部材からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルト34がその部分で撓んで、搬送ベルト34の裏面が支持部材と接触した状態となる。この状態で搬送ベルト34を走行させると、搬送ベルト34の裏面が支持部材と摩擦しながら移動することになり、搬送ベルト34の裏面には摩擦抵抗を少なくするために滑り易い素材を使ってはいるが、それでも搬送ベルト34の裏面が摩耗してしまう。
【0088】
しかし、本実施の形態2にかかるベルトコンベヤ31においては、支持部材としてのローラコンベヤ35Aに搬送ベルト34の搬送方向に回転する複数の回転ローラ35Bが設けられているので、搬送物の重さで搬送ベルト34の裏面が接触してもころがり摩擦となり、殆ど摩耗しなくて済むため、搬送ベルト34の寿命を著しく延ばすことができる。また、搬送ベルト34に掛かる抵抗が少なくなるため、同じ駆動エネルギーを掛けた場合には、走行距離がより伸びることになる。
【0089】
ここで、本実施の形態2においても、複数の回転ローラ35Bを支持部材35Aの全長に亘って設けているが、両端の駆動ローラ36及び従動ローラ37に近い部分は搬送ベルト34の撓みが少なくなり、支持部材35Aに接触しなくなるため、より撓み易い中間付近を中心として部分的に設けても効果がある。
【0090】
このようにして、本実施の形態2にかかるベルトコンベヤ31においては、電力を全く必要としないだけでなく、より軽くより安価でよりコンパクトで、入力レバー8A・入力ペダル8Bの回動角度がより小さくても搬送ベルト34をより長く送ることができるとともに搬送ベルト34の寿命を延ばすことができる。
【0091】
このような構成を有する本実施の形態2にかかるベルトコンベヤ31における搬送ベルト34の走行の仕組みについて、図5乃至図7及び図2乃至図4を参照して説明する。初期状態においては、実施の形態1と同様にバランスウエイト21の重さによってチェーン20及びチェーン22を介してスプロケット23が引き上げられ、リンク24は一組の上下ストッパー28のうち上方ストッパー28に当接して止まった状態になっている。
【0092】
この状態から、作業者が入力レバー8Aを手で回動させ或いは入力ペダル8Bを足で踏むことによって、リンク24は下方ストッパー28に当接するまで回動して、スプロケット23が下降する(入力ペダル8Bが約100mm下降することによってスプロケット23は約45mm下降する)のに伴ってチェーン22及びチェーン20を介して、バランスウエイト21の重さに抗して小スプロケット19が図7(b)において(即ち、正面から見て)右回り(時計回り)方向に約0.7回転し、回転軸18aに一体回転可能に取付けられた大スプロケット18も同じく右回り(時計回り)方向に約0.7回転する。
【0093】
この回転は、チェーン51によって小スプロケット50に伝達されるが、小スプロケット50の歯数は大スプロケット18の歯数の4分の1であるため、大スプロケット18が約0.7回転することによって小スプロケット50は右回り(時計回り)方向に約2.8回転して、駆動軸36aも右回り(時計回り)方向に約2.8回転するため、駆動軸36aに固定されている第2のプーリー44はワイヤ43を巻き取る方向に回転する。
【0094】
これによって、図6及び図7に示されるように、想像線で示される原位置にあった第1のプーリー42はワイヤ43が巻き取られるに連れて右側へ引張られるので、長いロッド46も想像線で示される原位置から実線で示される位置までスライドして、弛緩していたコイルばね48も実線で示されるように圧縮される。このとき、駆動軸36aに固定されている図示されないワンウェイクラッチが回動を駆動ローラ36に伝達しないため、搬送ベルト34が逆方向に走行することもなく、軽い力でコイルばね48を圧縮することができる。
【0095】
このようにコイルばね48を圧縮して弾性エネルギーを蓄えた状態で、作業者が入力レバー8A或いは入力ペダル8Bを開放すると、バランスウエイト21の重量及びコイルばね48の弾性エネルギーが相俟って、入力レバー8A及び入力ペダル8Bが原点に復帰するとともに、リンク24が先端に取付けられたスプロケット23が上昇する方向に回動し、小スプロケット19が正面から見て左回り(反時計回り)方向に約0.7回転し、回転軸18aに一体回転可能に取付けられた大スプロケット18も同じく左回り(反時計回り)方向に約0.7回転する。
【0096】
この回転は、チェーン51によって小スプロケット50に伝達され、小スプロケット50の歯数が大スプロケット18の歯数の4分の1であるため、大スプロケット18が約0.7回転することによって小スプロケット50は正面から見て左回り(反時計回り)方向に約2.8回転して、駆動軸36aも左回り(反時計回り)方向に約2.8回転するため、図示しないワンウェイクラッチが噛み合って、駆動ローラ36も正面から見て左回り(反時計回り)方向に回転して、これによって搬送ベルト34が従動ローラ37方向に走行する。
【0097】
ここで、前述の如く、駆動ローラ36の内部には慣性を増すために全周に亘って重りが取付けられているため、駆動ローラ36は約2.8回転以上回転して、搬送ベルト34をより長距離走行させて、搬送ベルト34に載置された搬送物をより長距離搬送することができる。
【0098】
また、作業者が入力レバー8A或いは入力ペダル8Bを少しずつ元に戻すことによって、搬送ベルト34を少しずつ走行させて、搬送ベルト34に載置された搬送物を少しずつ搬送すること(寸動送り)も容易にできる。
【0099】
このように、本実施の形態2にかかるベルトコンベヤ31においては、回転数増大伝達機構39をスプロケット18,19,23,50及びチェーン20,22,51で構成したために、僅かな部品点数と自由な配置で構成することができ、かつスプロケット及びチェーンは歯車よりも軽量でしかも安価であるため、ベルトコンベヤ31としても回転数増大伝達機構39の部分がコンパクトになるとともに全体としても軽量かつ低コストにすることができる。
【0100】
また、スプロケット及びチェーンは自由な配置で構成できるため、回転数増大の効果が大きく、上記特許文献2の実施の形態(回転数増大伝達機構を歯車で構成したもの)では入力レバーを約150度回動させないと駆動軸を約3.5回転させられなかったのに対して、本実施の形態2のベルトコンベヤ31においては、入力レバー8Aを僅か約13度回動させるだけで駆動軸36aを約2.8回転させることができ、入力レバーの回動角度を凡そ10分の1にすることができるという作用効果が得られる。
【0101】
さらに、本実施の形態2のベルトコンベヤ31は、電力が不要で全体としても軽量であるという長所を生かして、移動設置式のベルトコンベヤとしての用途が広がるものと考えられる。例えば、河川の堤防決壊による洪水時に、現場へ運んで設置して土嚢を搬送する等の緊急時の用途にも対応できる。
【0102】
このようにして、本実施の形態2にかかるベルトコンベヤ31においては、電力を全くしないだけでなく、より軽くより安価でよりコンパクトで、入力レバー8A・入力ペダル8Bの回動角度がより小さくても搬送ベルト34を長く送ることができる。
【0103】
さらに、本実施の形態2にかかるベルトコンベヤ31に特有の作用効果として、図2に示されるように、バランスウエイト21を正面から見て左側に配置して、入力軸8aを右側に配置することによって、入力レバー8Aまたは入力ペダル8Bを回動させると伸縮エネルギー蓄積機構を構成するコイルばね48が圧縮されて弾性エネルギーが蓄積され、入力レバー8Aまたは入力ペダル8Bを開放すると駆動ローラ36が正面から見て左回り(反時計回り)方向に回転して、搬送ベルト34が左方向に走行する。
【0104】
したがって、バランスウエイト21を正面から見て右側に配置して、入力軸8aを左側に配置するとともに、ワイヤ43を第1のプーリー42及び第2のプーリー44に逆方向に掛けかえることによって、駆動ローラ36が正面から見て右回り(時計回り)方向に回転して、搬送ベルト34が右方向に走行するので、部品を増やしたり交換したりする必要がなく、極めて容易に搬送ベルト34の走行方向を逆にすることができるという利点がある。
【0105】
なお、本実施の形態2においては、コイルばね48を中心とする伸縮エネルギー蓄積機構を駆動軸36aに直接取付けた場合について説明したが、駆動軸36aに駆動力を伝達する駆動力伝達軸を別に設けて、この駆動力伝達軸に伸縮エネルギー蓄積機構を取付けて駆動力伝達軸からベルト、ワイヤまたはチェーンを介して回転力を駆動軸36aに伝達する方式とすることもできる。
【0106】
実施の形態3
次に、本発明の実施の形態3について、図8及び図9を参照して説明する。
【0107】
図8(a)は本発明の実施の形態3にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図、(b)は正面図である。図9は本発明の実施の形態3にかかるベルトコンベヤの従動ローラ近傍を拡大して示す斜視図である。
【0108】
図8に示されるように、本実施の形態3にかかるベルトコンベヤ61は、図示しないアルミニウム棒を間に挟んで組付けた2枚のメッキ鋼板からなる1対のフレームの一方としての駆動側フレーム62と、それと離間対向した2枚のメッキ鋼板からなる1対のフレームの他方としての従動側フレーム63と、これら1対のフレーム62,63に両端を固定された支持部材としてのローラコンベヤ65と、ローラコンベヤ65側面の1対のフレーム62,63近傍に1対ずつ取付けられた支持脚70A,70B(向う側の支持脚はそれぞれ手前側の支持脚70A,70Bに重なって図示されず)とを基本骨格として構成されている。
【0109】
駆動側フレーム62には駆動軸66aが水平に軸支され、駆動ローラ66が一体回転可能に取付けられており、同様に従動側フレーム63には従動軸67aが水平に軸支され、従動ローラ67が一体回転可能に取付けられ、これら駆動ローラ66と従動ローラ67には無端状の走行可能な搬送ベルト64が掛け渡されている。そして、図8(a)に示されるように、駆動軸66aには、小型モータとしての小型電力モータ68の回転軸が直結した状態で接続されている。
【0110】
搬送ベルト64は、駆動ローラ66と従動ローラ67との間に緊張した状態で掛け渡されているため、通常は支持部材としてのローラコンベヤ65からは浮いた状態になっているが、重さのある搬送物を載置した場合には搬送ベルト64がその部分で撓んで、搬送ベルト64の裏面が支持部材としてのローラコンベヤ65と接触した状態となる。
【0111】
しかし、図9に示されるように、本実施の形態3にかかるベルトコンベヤ61においては、支持部材として断面コの字形の1対のレール65Cの間に複数の回転ローラ65Bを回転自在に取付けたローラコンベヤ65を用いており、ローラコンベヤ65に搬送ベルト64の搬送方向に回転する複数の回転ローラ65Bが設けられているので、搬送物の重さで搬送ベルト64の裏面が接触してもころがり摩擦となり、殆ど摩擦抵抗がないため、駆動力の小さい小型モータ68でも搬送ベルト64を高速で走行させることができる。
【0112】
ここで、本実施の形態3においては、複数の回転ローラ65Bを支持部材としてのローラコンベヤ65の全長に亘って設けているが、両端の駆動ローラ66及び従動ローラ67に近い部分は搬送ベルト64の撓みが少なくなり、ローラコンベヤ65に接触しなくなるため、より撓み易い中間付近を中心として全長でなく部分的に設けても、同様な作用効果が得られる。
【0113】
また、本実施の形態3においては、小型モータ68の回転軸を駆動ローラ66の駆動軸66aに直結させているが、これに限らず、駆動軸66aに駆動力を伝達する駆動力伝達軸に小型モータ68の回転軸を接続しても良い。
【0114】
さらに、本実施の形態3においては、駆動ローラ66の駆動軸66aを1対のフレームの一方としての駆動側フレーム62に軸支して、小型モータ68も駆動側フレーム62に取付けた場合についてのみ説明したが、1対のフレームの両方に従動ローラ67の従動軸67aを軸支して、これらの1対の従動ローラ67間に搬送ベルト64を掛け渡して、1対の従動ローラ67間において支持部材としてのローラコンベヤ65の断面コの字形の1対のレール65Cの間に駆動ローラ66の駆動軸66aを軸支して、この駆動軸66aに小型モータ68の回転軸を結合して駆動ローラ66を回転させることによって搬送ベルト64を走行させる構成としても良い。
【0115】
このようにして、本実施の形態3にかかるベルトコンベヤ61においては、搬送ベルト64の摩擦抵抗が殆どないため駆動力の小さい小型モータ68でも搬送ベルト64を高速で走行させることができる、電力を少ししか必要としない省エネルギータイプのベルトコンベヤとなる。
【0116】
本発明を実施するに際しては、ベルトコンベヤのその他の部分の構成、形状、数量、材質、大きさ、接続関係等についても、上記各実施の形態に限定されるものではない。
【0117】
なお、小型モータ68としては、回転電気子形で説明したが、回転界磁形としても使用できる。即ち、小型モータ68のシャフトを駆動側フレーム62に取り付け、回転側で直接ローラコンベヤ65を回動するようにすることができる。この場合には、全体をコンパクトに設計できる。
【産業上の利用可能性】
【0118】
本発明の実施の形態1にかかるベルトコンベヤ1は、搬送ベルト4を走行させる駆動ローラ6が取付けられた駆動軸6aと入力レバー8A及び入力ペダル8Bの一端が固定された入力軸8aとの間に回転数増大伝達機構9が設けられているため、入力レバー8Aを手で持って回動させ、または入力ペダル8Bを足で踏み込むと入力軸8aの回動が何回転にもなって駆動力伝達軸15aに伝達され、駆動力伝達軸15aに取付けられたぜんまいばね30が巻き上げられる。
【0119】
そこで手または足を離せば、ぜんまいばね30が弛緩するとともに蓄えられていた弾性力によって駆動軸6aが回転し、駆動ローラ6も一体に回転して搬送ベルト4を走行させる。そして、搬送ベルト4の走行距離は入力レバー8Aまたは入力ペダル8Bを回動させる角度と駆動軸6aの回転数の関係を予め調べておけば、自在に調節することができる。これによって、電力を用いずに必要なときに必要なだけ搬送ベルト4を走行させることができ、ぜんまいばね30の巻き上げ限界の範囲内で入力レバー8Aまたは入力ペダル8Bを任意の角度だけ回動させ、少しずつ戻すことによって、搬送ベルト4を微小距離ずつ送ること(寸動送り)も容易である。
【0120】
このようにして、必要なときだけ手動でぜんまいばね30を巻いて搬送ベルト4を走行させることができ、電力を一切用いず大幅に省エネルギー化を図ることができるとともに、細かい制御も容易に行うことができる。
【0121】
本発明の実施の形態2にかかるベルトコンベヤ31も、弾性力蓄積手段としてぜんまいばね30の代わりにコイルばね48を用いた点が大きく異なるのみであり、入力レバー8Aを手で持って回動させ、または入力ペダル8Bを足で踏み込んで離すと、蓄えられていた弾性力によって駆動軸36aが回転し、駆動ローラ36も一体に回転して搬送ベルト34を走行させる。
【0122】
したがって、電気を使用していないことから、水周りの作業場、例えば、調理室、炎天下の農作業場、コンベヤが水中に入る水槽への搬入または水槽からの搬出に使用できる。さらには、河川の堤防の決壊による洪水等の際には、現場へ運んで設置して、堤防を修復するための土嚢を搬送するのにも使用することができる。
【0123】
また、調理室においては、調理室と配膳室との間の受け渡しにも、絶縁変圧器等の絶縁性を高める防水構造の配線が不要となるから、ベルトコンベヤが廉価となる。また、駆動しないときには、全くエネルギーを使用していないから、常に連続運転する従来のベルトコンベヤと相違するので、省エネ効果がある。
【0124】
そして、薬局等の調合室と受け渡し場所間の搬送、クリーンルームと外部との受け渡し、野菜・果物の選果場での選果作業と選果後の搬送、勿論、部品組立工場の人海作業からメインコンベヤへの受け渡し、グループ単位の部品等の組み立てと搬送、函詰単位の搬送等に使用することができる。
【図面の簡単な説明】
【0125】
【図1】図1(a)は本発明の実施の形態1にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図、(b)は正面図である。
【図2】図2は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を正面側から見て示す縦断面図である。
【図3】図3は本発明の実施の形態1にかかるベルトコンベヤの駆動部分の構成を右側面側から見て示す縦断面図である。
【図4】図4は本発明の実施の形態1の変形例にかかるベルトコンベヤの従動ローラ近傍を拡大して示す斜視図である。
【図5】図5は本発明の実施の形態2にかかるベルトコンベヤの全体構成を第3のフレームの手前側フレーム板を外し、かつ中間部分を省略して示す側面図である。
【図6】図6は本発明の実施の形態2にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図である。
【図7】図7(a)は本発明の実施の形態2にかかるベルトコンベヤの駆動部分の構成を示す平面図、(b)は側面図である。
【図8】図8(a)は本発明の実施の形態3にかかるベルトコンベヤの全体構成を中間部分を省略して示す平面図、(b)は正面図である。
【図9】図9は本発明の実施の形態3にかかるベルトコンベヤの従動ローラ近傍を拡大して示す斜視図である。
【符号の説明】
【0126】
1,1A,31,61 ベルトコンベヤ
2,32,62 駆動側フレーム
3,33,63 従動側フレーム
4,34,64 搬送ベルト
5,5A,35A,65 支持部材
5B,65B 回転ローラ
6,36,66 駆動ローラ
6a,36a,66a 駆動軸
7,37,67 従動ローラ
7a,67a 従動軸
8a 入力軸
8A 入力レバー
8B 入力ペダル
9,39 回転数増大伝達機構
10A,10B,40,41,70A,70B 支持脚
15,18,19,23 スプロケット
15a 駆動力伝達軸
17,20,22 チェーン
26 ワンウェイクラッチ
30 ぜんまいばね
42 第1のプーリー
43 ワイヤ
44 第2のプーリー
45 フランジ付きガイド
45a フランジ
46 長いロッド
47 ばねホルダ
48 コイルばね
68 小型モータ
【特許請求の範囲】
【請求項1】
互いに離間対向した1対のフレームと、
前記1対のフレームの一方(駆動側フレーム)に軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、
前記1対のフレームの他方(従動側フレーム)に軸支された従動軸に一体回転可能に取付けられた従動ローラと、
前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材とを具備し、
前記支持部材には全長に亘ってまたは前記支持部材の中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられていることを特徴とするベルトコンベヤ。
【請求項2】
互いに離間対向した1対のフレームと、
前記1対のフレームの一方(駆動側フレーム)に軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、
前記1対のフレームの他方(従動側フレーム)に軸支された従動軸に一体回転可能に取付けられた従動ローラと、
前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、
前記駆動ローラの駆動軸または前記駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、
前記支持部材には全長に亘ってまたは前記支持部材の中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられていることを特徴とするベルトコンベヤ。
【請求項3】
互いに離間対向した1対のフレームと、
前記1対のフレームの両方に軸支された1対の従動軸に一体回転可能に取付けられた1対の従動ローラと、
前記1対の従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記1対の従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、
前記1対の従動ローラの間において、前記支持部材に軸支された駆動軸に一体回転可能に取付けられ前記搬送ベルトを走行させる駆動ローラと、
前記駆動ローラの駆動軸または前記駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、
前記支持部材には前記駆動ローラが軸支された部分を除く全長に亘ってまたは前記1対の従動ローラ及び前記駆動ローラの中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられていることを特徴とするベルトコンベヤ。
【請求項1】
互いに離間対向した1対のフレームと、
前記1対のフレームの一方(駆動側フレーム)に軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、
前記1対のフレームの他方(従動側フレーム)に軸支された従動軸に一体回転可能に取付けられた従動ローラと、
前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材とを具備し、
前記支持部材には全長に亘ってまたは前記支持部材の中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられていることを特徴とするベルトコンベヤ。
【請求項2】
互いに離間対向した1対のフレームと、
前記1対のフレームの一方(駆動側フレーム)に軸支された駆動軸に一体回転可能に取付けられた駆動ローラと、
前記1対のフレームの他方(従動側フレーム)に軸支された従動軸に一体回転可能に取付けられた従動ローラと、
前記駆動ローラと前記従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記駆動ローラと前記従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、
前記駆動ローラの駆動軸または前記駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、
前記支持部材には全長に亘ってまたは前記支持部材の中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられていることを特徴とするベルトコンベヤ。
【請求項3】
互いに離間対向した1対のフレームと、
前記1対のフレームの両方に軸支された1対の従動軸に一体回転可能に取付けられた1対の従動ローラと、
前記1対の従動ローラに掛け渡された無端状の走行可能な搬送ベルトと、
前記1対の従動ローラの間において、前記搬送ベルトの下方向への移動を制限し、前記搬送ベルトの裏面を支持する支持部材と、
前記1対の従動ローラの間において、前記支持部材に軸支された駆動軸に一体回転可能に取付けられ前記搬送ベルトを走行させる駆動ローラと、
前記駆動ローラの駆動軸または前記駆動軸に駆動力を伝達する駆動力伝達軸に接続された小型モータとを具備し、
前記支持部材には前記駆動ローラが軸支された部分を除く全長に亘ってまたは前記1対の従動ローラ及び前記駆動ローラの中間付近を中心として前記搬送ベルトが接触しても摩擦力が掛からないように前記搬送ベルトの搬送方向に回転する複数の回転ローラが設けられていることを特徴とするベルトコンベヤ。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−126222(P2007−126222A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2005−318179(P2005−318179)
【出願日】平成17年11月1日(2005.11.1)
【出願人】(591284379)豊明工業株式会社 (6)
【Fターム(参考)】
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成17年11月1日(2005.11.1)
【出願人】(591284379)豊明工業株式会社 (6)
【Fターム(参考)】
[ Back to top ]