
ベルト式仮撚装置
【課題】ベルトの交差部との相対における解撚ポイントの更なる安定化と、装置のコンパクト化を同時に実現する技術を提供する。
【解決手段】ベルト式仮撚装置111は、基準ベルト1・可動ベルト2を相互に交差及び圧接させた状態で走行させることで糸Yをニップしながら撚りを付与する。基準ベルト1が巻き掛けられる駆動プーリ10には、外周縁50aを有する解撚ディスク50が設けられる。この解撚ディスク50は、前記駆動プーリ10と共回りするように構成される。この解撚ディスク50の外周縁50aにおける外径Dは、前記駆動プーリ10の外径に前記基準ベルト1の厚みを加えて得られる値以上に設定される。交差部Rよりも下流側の前記糸Yの糸道は、前記解撚ディスク50の外周縁50aとの接触により屈曲される。
【解決手段】ベルト式仮撚装置111は、基準ベルト1・可動ベルト2を相互に交差及び圧接させた状態で走行させることで糸Yをニップしながら撚りを付与する。基準ベルト1が巻き掛けられる駆動プーリ10には、外周縁50aを有する解撚ディスク50が設けられる。この解撚ディスク50は、前記駆動プーリ10と共回りするように構成される。この解撚ディスク50の外周縁50aにおける外径Dは、前記駆動プーリ10の外径に前記基準ベルト1の厚みを加えて得られる値以上に設定される。交差部Rよりも下流側の前記糸Yの糸道は、前記解撚ディスク50の外周縁50aとの接触により屈曲される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ベルト式仮撚装置に係り、詳しくは、解撚ポイントを固定する技術に関する
【背景技術】
【0002】
この種の技術として特許文献1(特開2002−266179号公報)は、仮撚装置のニップ点の直ぐ下流側に糸を解撚させるための糸ガイドを設けた仮撚加工機を開示する。この仮撚加工機においては、特許文献1の図5に示されるように、ニップツイスタ7(仮撚装置)の下流側であってニップ点Nからオフセットした位置にガイドローラ8が配されている。そして、このガイドローラ8の存在により、『解撚張力T2を低くしても、ガイドローラ8の位置に解撚ポイントを安定させることができ、糸Yの長手方向の解撚状態のバラツキをなくし、かつ、未解撚を防止できる』とされる。
【0003】
また、特許文献2(昭58−23924号公報)は、ベルトを通過した直後の糸に屈曲を与えることにより解撚点の変動を防止する技術を開示する。具体的には、ベルト交差部のベルト接触面と異なった面上に位置決めされ、ベルトを通過した糸に屈曲を与えるガイドを設けている。このガイドによれば、『糸の解撚点はベルト交差部の最終点に規制され、ベルト交差部の内部まで移動することもない』とされる。
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記の各特許文献1,2の何れの技術も、上記交差部との相対における解撚ポイントの安定に一定の効果を発揮する有益なものである。
【0005】
本発明は斯かる諸点に鑑みてなされたものであり、その主な目的は、解撚ポイントを固定する、全く新規な構成を提供することにある。
【課題を解決するための手段及び効果】
【0006】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0007】
本願発明の観点によれば、以下のように構成される、ベルト式仮撚装置が提供される。即ち、ベルト式仮撚装置は、一対の無端ベルトを相互に交差及び圧接させた状態で走行させることで糸をニップしながら撚りを付与する。前記無端ベルトが巻き掛けられるプーリには、外周縁を有する解撚部が設けられる。この解撚部は、前記プーリと共回りするように構成される。この解撚部の外周縁における外径は、前記プーリの外径に前記無端ベルトの厚みを加えて得られる値以上に設定される。前記一対の無端ベルトが交差する部分である交差部よりも下流側の前記糸の糸道は、前記解撚部の外周縁との接触により屈曲される。以上の構成によれば、前記解撚部の外周縁における周速が、前記交差部内における前記糸の周速を上回るので、前記交差部で付与された前記糸の撚りを、前記解撚部の外周縁に至るまで維持することができ、もって、前記糸の解撚ポイントが前記解撚部の外周縁上に固定される。また、前記解撚部の外周縁における外径が前記無端ベルトよりも外周側へ突出する構成により、前記の交差部と解撚部の間の区間における前記糸の糸道を、前記交差部内における前記糸の糸道と略一直線とすることが可能となる。そして、このように略一直線な糸道を採用した場合は、前記交差部の下流側終端における前記無端ベルトの偏摩耗が回避される。
【0008】
上記のベルト式仮撚装置は、以下の構成を採用することができる。即ち、前記解撚部が前記プーリと別体として構成される場合と、前記解撚部が前記プーリと一体として構成される場合と、が考えられる。前者の構成は前記解撚部のみを交換できる点で優れ、後者の構成は部品点数の削減に寄与する。
【0009】
上記のベルト式仮撚装置は、以下の構成を採用することができる。即ち、前記解撚部の外周縁における前記糸の糸道の屈曲を強めるように前記糸をガイドする屈曲ガイドが設けられる。以上の構成によれば、前記解撚部の外周縁における前記糸の糸道の屈曲が強まるので、この屈曲により実現される前記糸の解撚ポイントの安定が一層高いレベルで実現される。
【発明を実施するための最良の形態】
【0010】
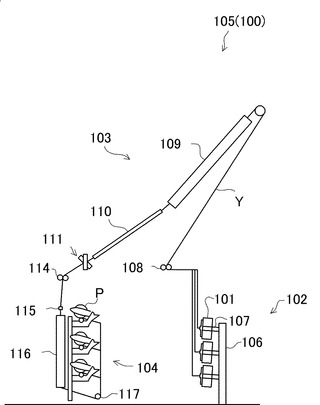
以下、図面を参照しつつ、本発明の実施の形態を説明する。図1は、本発明の一実施形態に係る延伸仮撚加工機の概略構成図である。
【0011】
本実施形態において延伸仮撚加工機100は、給糸パッケージ101の糸Yを供給する給糸部102と、この給糸部102から供給される糸Yに対して延伸仮撚加工処理を施す糸加工処理部103と、糸加工処理部103により延伸仮撚加工処理が施された糸Yを巻き取って所定径の巻取パッケージPを形成する巻取部104と、を含んで構成される錘105を複数で備える。複数の錘105は、本図の紙面垂直方向に並設される。延伸仮撚加工機100をコンパクトとすることを目的として、図1に示されるように、給糸部102や巻取部104は上下に重ねて配される。
【0012】
給糸パッケージ101は、複数の錘105で共通のクリールスタンド106のペグ107に保持される。
【0013】
糸加工処理部103は、糸Yの走行方向に沿って順に、第一フィードローラ108と、一次ヒータ109と、冷却器110と、ベルト式仮撚装置111と、第二フィードローラ114と、インタレースノズル115と、二次ヒータ116と、第三フィードローラ117と、を備えて構成される。
【0014】
第一フィードローラ108と第二フィードローラ114の間で糸Yが延伸されるように、第二フィードローラ114の糸送り速度は、第一フィードローラ108の糸送り速度と比較して大きく設定される。一方、第二フィードローラ114と第三フィードローラ117の間で糸Yが弛緩されるように、第三フィードローラ117の糸送り速度は、第二フィードローラ114の糸送り速度と比較して小さく設定される。
【0015】
ベルト式仮撚装置111は、一対の無端ベルトを相互に交差及び圧接させた状態で走行させることで走行する糸Yをニップしながら撚りを付与するものであって、この糸Yに付与された撚りはベルト式仮撚装置111から糸Yの走行方向上流側へ向かって第一フィードローラ108に至るまで伝播する。糸Yは、延伸されつつ撚りが付与された状態で一次ヒータ109で熱セットされた後、冷却器110で冷却され、ベルト式仮撚装置111を通過する際に解撚される。この延伸仮撚加工処理が施された糸Yには、インタレースノズル115において適宜に交絡部が形成されることで、加撚糸と同程度の集束性が付与される。その後、糸Yは、弛緩された状態で二次ヒータ116において所定の熱処理が施され、巻取部104において巻取パッケージPとして巻き取られる。
【0016】
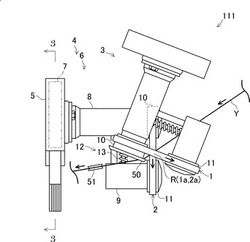
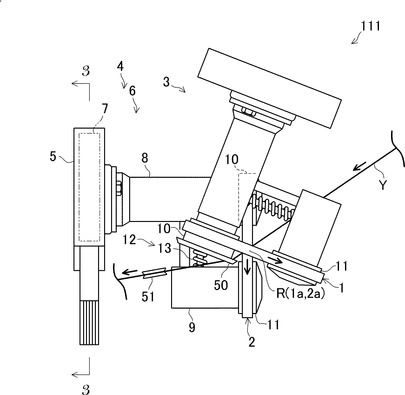
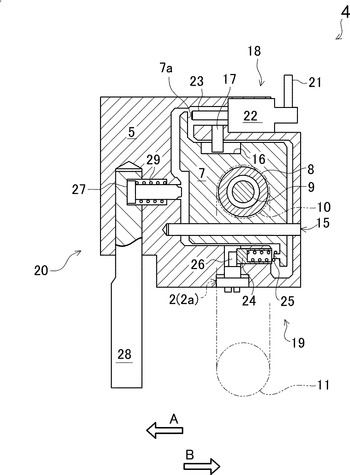
次に、ベルト式仮撚装置111について説明する。図2は、本発明の一実施形態に係るベルト式仮撚装置の側面図である。図3は、図2の3−3線矢視断面図である。図4は、ベルト式仮撚装置内における糸道の概略図である。
【0017】
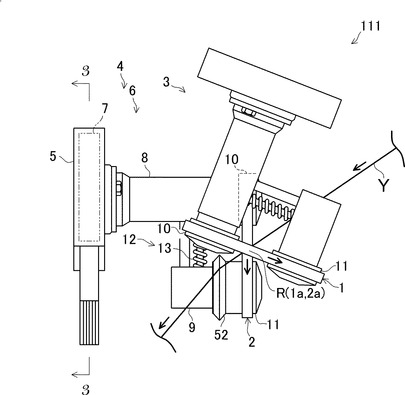
図2に示されるように、ベルト式仮撚装置111は、基準側のベルトとしての基準ベルト1と、可動側のベルトとしての可動ベルト2と、を備え、前記の基準ベルト1及び可動ベルト2を走行させつつ互いに近接させることで、前記の基準ベルト1及び可動ベルト2に挟まれながら走行する糸Yに対して撚りを付与する。即ち、ベルト式仮撚装置111は、基準ベルト1を含む基準ベルトユニット3と、可動ベルト2を含む可動ベルトユニット4と、を備える。これら基準ベルトユニット3・可動ベルトユニット4は互いに概ね対称の構造とされるので、以下、主として、可動ベルトユニット4の構造を詳細に説明する。
【0018】
可動ベルトユニット4は、延伸仮撚加工機100本体に対して固定されるユニットベース5と、このユニットベース5に対して摺動可能な可動ベルト支持体6と、前記の可動ベルト2と、から構成される。可動ベルト支持体6は、ユニットベース5内に収容される駆動部7と、この駆動部7から突設されるプーリ駆動軸収容筒8と、このプーリ駆動軸収容筒8の先端に配され、該プーリ駆動軸収容筒8内に収容される図略の駆動シャフトによって回転駆動される駆動プーリ10と、この駆動プーリ10と対を成し、駆動プーリ10と共に可動ベルト2が掛けられる従動プーリ11と、これら駆動プーリ10及び従動プーリ11に掛けられる可動ベルト2に対して所定の張力を付与するための張力付与部12と、を主たる構成として備える。張力付与部12は、従動プーリ11を回転可能に支持する従動プーリ支持体9と、上記のプーリ駆動軸収容筒8と、の間に介挿される略示の圧縮コイルスプリング13を含んで構成される。
【0019】
本実施形態において駆動プーリ10と従動プーリ11に掛けられる可動ベルト2は、可撓性を有する無端ベルトであって、そのベルト幅は概ね8〜12[mm]とされる。前記のプーリ駆動軸収容筒8は概ね基準ベルトユニット3へ向かって延在し、可動ベルトユニット4によって支持される可動ベルト2が、基準ベルトユニット3に支持される基準ベルト1と接触可能に構成される。基準ベルト1と可動ベルト2が糸Yを挟むとき、本図に示されるように、可動ベルト2に対して対向する基準ベルト1の部分としての基準ベルト対向面1aと、基準ベルト1に対して対向する可動ベルト2の部分としての可動ベルト対向面2aと、は略平行とされる。そして、本実施形態において可動ベルト2は、基準ベルト対向面1aと、可動ベルト対向面2aと、の平行な関係を維持しながら基準ベルト1に対して進退可能に構成される。即ち、可動ベルト2を支持する可動ベルト支持体6の駆動部7は、ユニットベース5内において、可動ベルト対向面2aに対して垂直な方向へ摺動するように構成される。
【0020】
図3に示されるように、ユニットベース5には上記の可動ベルト対向面2aに対して垂直な方向に沿う略示のガイドシャフト15が挿設され、このガイドシャフト15と図示しないリニアブッシングを介して、駆動部7はユニットベース5に対して連結される。この構成で、可動ベルト2は、基準ベルト対向面1aと、可動ベルト対向面2aと、の平行な関係を維持しながら基準ベルト1に対して進退可能とされる。加えて、上記の駆動部7には上記のガイドシャフト15の挿設方向と平行に延びるキー溝16が刻設され、このキー溝16内に収容されるキー17がユニットベース5に設けられ、このキー溝16及びキー17の存在により、ガイドシャフト15まわりの駆動部7の回転が規制されるようになっている。前記のプーリ駆動軸収容筒8は、本図に示されるように駆動部7に対して嵌入され、駆動プーリ10に連結される駆動シャフト9はプーリ駆動軸収容筒8に対して略同軸の関係とされる。
【0021】
ユニットベース5には、基準ベルト1に対して近接する方向Aへ可動ベルト2を付勢する可動ベルト近接付勢部18(可動ベルト近接付勢手段)と、基準ベルト1から離反する方向Bへ可動ベルト2を付勢する可動ベルト離反付勢部19と、基準ベルト1から離反する方向Bへ可動ベルト2を移動させる可動ベルト移動部20(可動ベルト移動手段)と、が設けられる。
【0022】
この可動ベルト近接付勢部18は、本実施形態において空気圧式に構成されることで、可動ベルト2に対して付与する付勢力を増減可能に構成される。可動ベルト近接付勢部18は、具体的には、図略の圧縮空気供給装置に接続されるエア供給口21と、エア供給口21を介して供給される圧縮空気によって駆動される図略のベロフラムを内蔵する可動ベルト近接付勢部本体22と、このベロフラムの動作に連動する出力ロッド23と、から構成される。この出力ロッド23は、ガイドシャフト15の挿設方向と平行となるように配され、エア供給口21を介して可動ベルト近接付勢部本体22に圧縮空気が供給されると駆動部7に形成されるロッド当接面7aに当接し、圧縮空気によりベロフラムを介して出力ロッド23に作用される圧力が駆動部7に伝達されるように構成される。この可動ベルト近接付勢部18は、駆動部7に伝達される上記圧力(エアー圧)が、基準ベルト1に対して近接する方向Aへ可動ベルト2を付勢するのに供されるように構成される。即ち、可動ベルト2から基準ベルト1を望む方向と、可動ベルト近接付勢部本体22から出力ロッド23乃至ロッド当接面7aを望む方向と、は同じの方向である。
【0023】
上記の可動ベルト離反付勢部19は、本実施形態においてバネ式に構成され、具体的には、ガイドシャフト15の挿設方向と平行な方向に摺動可能な態様でユニットベース5に支持されるバネ収容体24と、このバネ収容体24と駆動部7の間に介設される圧縮コイルスプリング25と、バネ収容体24をガイドシャフト15の挿設方向と平行な方向に進退移動させるネジ式偏心カム26と、から構成される。上記のバネ収容体24と圧縮コイルスプリング25と駆動部7は、バネ収容体24と駆動部7の間に介設される圧縮コイルスプリング25の自己弾性復元力が可動ベルト2を基準ベルト1から離反させる方向Bへ付勢するのに供されるように配置される。従って、可動ベルト近接付勢部18によって可動ベルト2に対して付与される付勢力と、可動ベルト離反付勢部19によって可動ベルト2に対して付与される付勢力と、は反対の方向に作用するように構成される。ネジ式偏心カム26は、バネ収容体24をガイドシャフト15の挿設方向と平行な方向に進退移動させることで、可動ベルト離反付勢部19によって可動ベルト2に対して付与される付勢力を調節するためのものである。
【0024】
上記の可動ベルト移動部20は、本実施形態においてカム駆動式に構成され、具体的には、ガイドシャフト15の挿設方向と平行な方向に摺動可能な態様でユニットベース5に支持される進出ロッド27と、先端に進出ロッド27と係合する切欠部を有し、この進出ロッド27を進出させるための、カム式ノブ28と、から構成される。このカム式ノブ28による進出ロッド27の進出方向は、可動ベルト2が基準ベルト1から離反する方向と同一の方向に設定され、進出ロッド27がカム式ノブ28との係合により進出すると、進出ロッド27が駆動部7に対して当接し、当該駆動部7を介して可動ベルト2が基準ベルト1から離反するように構成される。カム式ノブ28による進出ロッド27の進出が解除されたときに進出ロッド27が駆動部7から離反する方向へ短時間で退避するよう、進出ロッド27とユニットベース5の間に圧縮コイルスプリング29が介設される。
【0025】
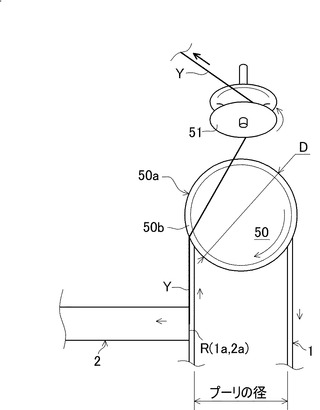
図2及び図4に示されるように、基準ベルトユニット3の駆動プーリ10には、外周縁50aを有する解撚ディスク50(解撚部)が図示しないボルトなどの締結手段によって連結固定される。この解撚ディスク50は、例えば、ステンレスやセラミックなどの剛体とされ、駆動プーリ10に対して固定されることで、駆動プーリ10と共回りする。換言すれば、解撚ディスク50は積極回転するようになっている。そして、この解撚ディスク50の外周縁50aの外径Dは、駆動プーリ10の外径に、基準ベルト1の厚みを二回、加えて得られる値以上に設定される。換言すれば、上記解撚ディスク50の外周縁50aの外径Dは、図4に示されるように、駆動プーリ10に巻き掛けられる基準ベルト1よりも更に外周側に突出する(はみ出る)ように設定される。この構成で、一対の基準ベルト1及び可動ベルト2が交差する部分である交差部Rよりも下流側の糸Yの糸道は、本図に示されるように、解撚ディスク50の外周縁50aとの接触により屈曲されるようになっている。なお、この接触は、本図に示されるように、解撚ディスク50の外周縁50aに沿ったかたちの線接触ではなく、糸Yと外周縁50aが交差することを特徴とする点接触となる。本実施形態では、更に、解撚ディスク50の外周縁50a近傍には、図4に示されるように、糸Yの糸道の下流側へ向かって狭窄されるテーパ外周面50bが形成される。そして、このテーパ外周面50bに対して、糸Yは接触摩擦可能に構成される。テーパ外周面50bと糸Yとの接触は、微視的に見れば線接触となっている。
【0026】
更に、解撚ディスク50の下流側には、図2に示されるように、走行する糸Yに対して従動回転する断面略V字状の屈曲ガイド51が設けられる。この屈曲ガイド51は、上記解撚ディスク50の外周縁50aにおける上記糸Yの糸道の屈曲を強める。即ち、図4に示されるように、基準ベルト1と可動ベルト2によってニップされて送糸された糸Yは、若干の走行を経て、解撚ディスク50の外周縁50a上で屈曲され、更に若干の走行を経て、屈曲ガイド51によって上記屈曲の略反対の方向へ屈曲される。
【0027】
次に、本実施形態に係るベルト式仮撚装置111の作動について説明する。
【0028】
先ず、基準ベルト1と可動ベルト2の間に、加撚対象としての糸Yの太さよりも十分大きな間隙が存在しており、この糸Yは、図2に示される太線矢印で示される方向へ走行しているものとする。
【0029】
<加撚の開始>
この状態で、糸Yに対する加撚を開始するには、先ず、図示しないモータによって駆動プーリ10を所定の回転数で回転させて、可動ベルト2を所定速度で走行させた状態とする。この可動ベルト2の走行方向は本図において太線矢印で示される方向である。基準ベルトユニット3についても同様とする。
【0030】
次に、図3に示される可動ベルト近接付勢部18に所定圧力の圧縮空気を導入して出力ロッド23を進出させる。これにより、出力ロッド23が駆動部7のロッド当接面7aに当接し、出力ロッド23が可動ベルト近接付勢部本体22から受ける圧力が駆動部7に伝達されることで、駆動部7は、可動ベルト離反付勢部19に属する圧縮コイルスプリング25の自己弾性復元力に抗するかたちで、ガイドシャフト15の挿設方向に沿って摺動し、もって、可動ベルト2が基準ベルト1に対して近接する。やがて、可動ベルト2が糸Yに対して当接すると、出力ロッド23が可動ベルト近接付勢部本体22から受ける圧力が、糸Yに対する可動ベルト2の接圧(糸Yに対する基準ベルト1の接圧)に変換される。
【0031】
基準ベルト1及び可動ベルト2の走行方向は、何れも、糸Yに対して所定の角度を有しており、もって、基準ベルト1及び可動ベルト2の走行は、糸Yを送出する機能と、糸Yに対して加撚トルクを付与する機能と、を発揮するようになっている。
【0032】
<加撚の停止:1>
上記の状態で、糸Yに対する加撚を停止するときは、先ず、可動ベルト近接付勢部18に対する圧縮空気の供給を停止すると共に、既に可動ベルト近接付勢部18に対して供給された圧縮空気を抜くことで、可動ベルト近接付勢部18によって駆動部7に対して付与される付勢力を消失させる。すると、糸Yに対する可動ベルト2の接圧が消失されると共に、可動ベルト離反付勢部19によって駆動部7に対して付与される付勢力により駆動部7は可動ベルト2を基準ベルト1から離反させる方向へ移動(退避)し、基準ベルト1と可動ベルト2の間に糸Yの太さと比較して十分大きな間隙が生成され、もって、糸Yに対する加撚が停止する。
【0033】
<加撚の停止:2>
例えば基準ベルト1や可動ベルト2を交換するときは、カム式ノブ28を適宜回転させておくとよい。これによれば、進出ロッド27がカム式ノブ28との係合により進出し、駆動部7が、可動ベルト2が基準ベルト1から離反する方向へ移動(退避)し、基準ベルト1と可動ベルト2の間に十分大きな間隙が生成されるからである。付言ならば、可動ベルト近接付勢部18によって駆動部7に対して付勢力が付与されているときは、ガイドシャフト15の挿設方向に沿った駆動部7の進退は、択一的に、進出ロッド27の進出量か、それとも圧縮コイルスプリング25によって駆動部7に対して付与される付勢力に支配されることとなる。一方、可動ベルト近接付勢部18によって駆動部7に対して付勢力が付与されていないときは、ガイドシャフト15の挿設方向に沿った駆動部7の進退は、圧縮コイルスプリング25によって駆動部7に対して付与される付勢力に支配されることとなる。
【0034】
<接圧の調整>
ところで、糸Yに対する加撚の際に、可動ベルト近接付勢部18に対して所定圧力の圧縮空気を供給することで発生する、糸Yに対する可動ベルト2の接圧(糸Yに対する基準ベルト1の接圧)を調整するには、ネジ式偏心カム26を何れかの方向に回転させればよい。即ち、糸Yに対する加撚の際は、可動ベルト近接付勢部18によって駆動部7に対して付与される付勢力が、糸Yに対する可動ベルト2の接圧と、可動ベルト離反付勢部19によって駆動部7に対して付与される付勢力と、の合力と等しくなっているので、この関係において、ネジ式偏心カム26を何れかの方向に回転させると、可動ベルト離反付勢部19によって駆動部7に対して付与される付勢力が増減し、相対的に、糸Yに対する可動ベルト2の接圧が変化するからである。全体(例えば1機台240錘)の接圧調整(糸の種類により)は、空気圧力を変えることにより全錘一斉に行う。ネジ式偏心カム26による調整は、一斉に行われる上記の調整後、接圧力を測定し、この接圧力が各錘でバラついたときに調整するために使用される。
【0035】
<解撚ディスク50の作用>
次に、図5及び図6に基づいて、上記の解撚ディスク50の作用を詳細に説明する。図5は、解撚張力T2が低い場合の解撚ポイントを示す図である。図6は、解撚張力T2が高い場合の解撚ポイントを示す図である。なお、図5及び図6において、前述の交差部R内に存在する糸Yは通常の状態においては見ることができないが、解撚ポイントの位置を説明するためにあえて基準ベルト1の手前側に描いた。
【0036】
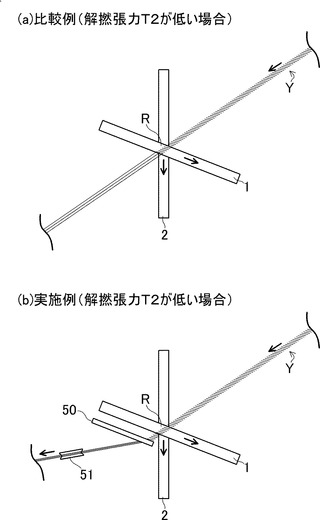
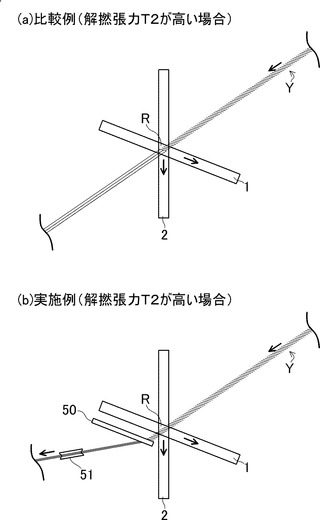
解撚張力T2が低い場合は、図5(a)に示されるように、解撚ポイントは基準ベルト1と可動ベルト2の交差部Rの下流側の端に位置する。しかし、解撚張力T2が高い場合は、図6(a)に示されるように、解撚ポイントが基準ベルト1と可動ベルト2の交差部R内に進入してしまう。この結果、解撚された上記糸Yが基準ベルト1及び可動ベルト2に対して擦れ合って毛羽立ちが発生してしまう。これに対し、上記解撚ディスク50を含む上記実施形態の構成では、図5(b)及び図6(b)に示されるように、解撚張力T2の高低に拘わらず、解撚ポイントが常に解撚ディスク50の外周縁50a上に固定される。従って、解撚ポイントが基準ベルト1と可動ベルト2の交差部R内に進入してしまうことがないので、毛羽立ちの発生を抑制できる。
【0037】
更には、屈曲ガイド51の存在により解撚ディスク50における上記糸Yの糸道の屈曲が強められているので、上記糸Yの解撚ポイントの安定が一層高いレベルで実現される。
【0038】
次に、上記の解撚ディスク50の技術的効果を確認するための試験について説明する。下記表1において、実施例とあるのは図5(a)に示される構成に解撚ディスク50を付加した構成に関し、比較例とあるのは図5(a)に示される構成に関する。下記表1において、試験No.1〜3の糸種は75den/144fであって、糸速は600m/minである。試験No.4〜6の糸種は150den/288fであって、糸速は600m/minである。表中、「解撚張力T2 gr」とあるのは、ベルト式仮撚装置111よりも下流側の糸Yの張力を意味し、単位のgrはグラムを意味する。「B.F/1000m」とあるのは、1000mあたりの毛羽数を意味する。
【0039】
【表1】

【0040】
上記表1の比較例によれば、解撚張力T2が高いと毛羽の発生が顕著であることが判る。そして、上記の解撚ディスク50を採用した実施例では、解撚張力T2の大小に拘わらず比較例と比較して毛羽数が略半数近くに抑えられたことが判る。毛羽は一般に解撚ポイントがベルト間に進入したときに発生することから、上記実施例では、解撚ポイントのベルト間への進入が抑えられ、これは他ならぬ、解撚ポイントが安定して固定されたからだと考えられる。
【0041】
(まとめ)
以上説明したように上記実施形態においてベルト式仮撚装置111は以下のように構成される。即ち、ベルト式仮撚装置111は、基準ベルト1・可動ベルト2を相互に交差及び圧接させた状態で走行させることで糸Yをニップしながら撚りを付与する。基準ベルト1が巻き掛けられる駆動プーリ10には、外周縁50aを有する解撚ディスク50が設けられる。この解撚ディスク50は、前記駆動プーリ10と共回りするように構成される。この解撚ディスク50の外周縁50aにおける外径Dは、前記駆動プーリ10の外径に前記基準ベルト1の厚みを加えて得られる値以上に設定される。交差部Rよりも下流側の前記糸Yの糸道は、前記解撚ディスク50の外周縁50aとの接触により屈曲される。以上の構成によれば、前記解撚ディスク50の外周縁50aにおける周速が、前記交差部R内における前記糸Yの周速を上回るので、前記交差部Rで付与された前記糸Yの撚りを、前記解撚ディスク50の外周縁50aに至るまで維持することができ、もって、前記糸Yの解撚ポイントが前記解撚ディスク50の外周縁50a上に固定される。また、前記解撚ディスク50の外周縁50aにおける外径Dが基準ベルト1よりも外周側へ突出する構成により、前記の交差部Rと解撚ディスク50の間の区間における前記糸Yの糸道を、前記交差部R内における前記糸Yの糸道と略一直線とすることが可能となる。そして、このように略一直線な糸道を採用した場合は、前記交差部Rの下流側終端における基準ベルト1及び可動ベルト2の偏摩耗が回避される。
【0042】
なお、上記実施形態では、前記の交差部Rと解撚ディスク50の間の区間における前記糸Yの糸道が、前記交差部R内における前記糸Yの糸道と略一直線となるように、解撚ディスク50の外周縁50aにおける外径Dが設定されている。
【0043】
なお、例えば、上記の解撚ディスク50が積極回転せず、糸Yとの接触により回転するように構成する場合は、前記解撚ディスク50の外周縁50aにおける周速が、前記交差部R内における前記糸Yの周速を上回ることはなく、従って、前記交差部Rで付与された前記糸Yの撚りを、前記解撚ディスク50の外周縁50aに至るまで維持することが全くできない。また、上記の解撚ディスク50を積極回転させる構成としても、前記解撚ディスク50の外周縁50aにおける周速が、前記交差部R内における前記糸Yの周速を上回る程度には高速回転させない場合は、前記交差部Rで付与された前記糸Yの撚りを、前記解撚ディスク50の外周縁50aに至るまで完全には維持できない。
【0044】
上記のベルト式仮撚装置111は、以下の構成を採用することができる。即ち、前記解撚ディスク50の外周縁50aにおける前記糸Yの糸道の屈曲を強めるように前記糸Yをガイドする屈曲ガイド51が設けられる。以上の構成によれば、前記解撚ディスク50の外周縁50aにおける前記糸Yの糸道の屈曲が強まるので、この屈曲により実現される前記糸Yの解撚ポイントの安定が一層高いレベルで実現される。
【0045】
以上に本発明の好適な実施形態を説明したが、上記の実施形態は以下のように変更して実施することができる。
【0046】
図7は、図2に類似する図であって、本発明の他の実施形態を示す図である。本図に示されるように、上記実施形態に係る解撚ディスク50に代えて、可動ベルトユニット4の従動プーリ11の外周面に環状の突条部52(解撚部)を突設することとしてもよい。換言すれば、駆動プーリ10と別体である解撚ディスク50に代えて、従動プーリ11と一体である突条部52を採用してもよい。即ち、解撚ディスク50や突条部52などの解撚部は、プーリ(10、11)に対して別体であっても一体であってもよい。解撚部を別体とした構成は前記解撚部のみを交換できる点で優れ、解撚部を一体とした構成は部品点数の削減に寄与する。何れの場合であっても、図6(b)で示すような、解撚張力T2が高い場合における解撚ポイントの固定が実現される。また、この場合でも、上記実施形態と同様、突条部52による上記糸Yの糸道の屈曲を強めるように上記糸Yをガイドする屈曲ガイドを設けることが好ましい。
【図面の簡単な説明】
【0047】
【図1】本発明の一実施形態に係る延伸仮撚加工機の概略構成図
【図2】本発明の一実施形態に係るベルト式仮撚装置の側面図
【図3】図2の3−3線矢視断面図
【図4】ベルト式仮撚装置内における糸道の概略図
【図5】解撚張力T2が低い場合の解撚ポイントを示す図
【図6】解撚張力T2が高い場合の解撚ポイントを示す図
【図7】図2に類似する図であって、本発明の他の実施形態を示す図
【符号の説明】
【0048】
1 基準ベルト
2 可動ベルト
10 駆動プーリ
11 従動プーリ
50 解撚ディスク
111 ベルト式仮撚装置
【技術分野】
【0001】
本発明は、ベルト式仮撚装置に係り、詳しくは、解撚ポイントを固定する技術に関する
【背景技術】
【0002】
この種の技術として特許文献1(特開2002−266179号公報)は、仮撚装置のニップ点の直ぐ下流側に糸を解撚させるための糸ガイドを設けた仮撚加工機を開示する。この仮撚加工機においては、特許文献1の図5に示されるように、ニップツイスタ7(仮撚装置)の下流側であってニップ点Nからオフセットした位置にガイドローラ8が配されている。そして、このガイドローラ8の存在により、『解撚張力T2を低くしても、ガイドローラ8の位置に解撚ポイントを安定させることができ、糸Yの長手方向の解撚状態のバラツキをなくし、かつ、未解撚を防止できる』とされる。
【0003】
また、特許文献2(昭58−23924号公報)は、ベルトを通過した直後の糸に屈曲を与えることにより解撚点の変動を防止する技術を開示する。具体的には、ベルト交差部のベルト接触面と異なった面上に位置決めされ、ベルトを通過した糸に屈曲を与えるガイドを設けている。このガイドによれば、『糸の解撚点はベルト交差部の最終点に規制され、ベルト交差部の内部まで移動することもない』とされる。
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記の各特許文献1,2の何れの技術も、上記交差部との相対における解撚ポイントの安定に一定の効果を発揮する有益なものである。
【0005】
本発明は斯かる諸点に鑑みてなされたものであり、その主な目的は、解撚ポイントを固定する、全く新規な構成を提供することにある。
【課題を解決するための手段及び効果】
【0006】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0007】
本願発明の観点によれば、以下のように構成される、ベルト式仮撚装置が提供される。即ち、ベルト式仮撚装置は、一対の無端ベルトを相互に交差及び圧接させた状態で走行させることで糸をニップしながら撚りを付与する。前記無端ベルトが巻き掛けられるプーリには、外周縁を有する解撚部が設けられる。この解撚部は、前記プーリと共回りするように構成される。この解撚部の外周縁における外径は、前記プーリの外径に前記無端ベルトの厚みを加えて得られる値以上に設定される。前記一対の無端ベルトが交差する部分である交差部よりも下流側の前記糸の糸道は、前記解撚部の外周縁との接触により屈曲される。以上の構成によれば、前記解撚部の外周縁における周速が、前記交差部内における前記糸の周速を上回るので、前記交差部で付与された前記糸の撚りを、前記解撚部の外周縁に至るまで維持することができ、もって、前記糸の解撚ポイントが前記解撚部の外周縁上に固定される。また、前記解撚部の外周縁における外径が前記無端ベルトよりも外周側へ突出する構成により、前記の交差部と解撚部の間の区間における前記糸の糸道を、前記交差部内における前記糸の糸道と略一直線とすることが可能となる。そして、このように略一直線な糸道を採用した場合は、前記交差部の下流側終端における前記無端ベルトの偏摩耗が回避される。
【0008】
上記のベルト式仮撚装置は、以下の構成を採用することができる。即ち、前記解撚部が前記プーリと別体として構成される場合と、前記解撚部が前記プーリと一体として構成される場合と、が考えられる。前者の構成は前記解撚部のみを交換できる点で優れ、後者の構成は部品点数の削減に寄与する。
【0009】
上記のベルト式仮撚装置は、以下の構成を採用することができる。即ち、前記解撚部の外周縁における前記糸の糸道の屈曲を強めるように前記糸をガイドする屈曲ガイドが設けられる。以上の構成によれば、前記解撚部の外周縁における前記糸の糸道の屈曲が強まるので、この屈曲により実現される前記糸の解撚ポイントの安定が一層高いレベルで実現される。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照しつつ、本発明の実施の形態を説明する。図1は、本発明の一実施形態に係る延伸仮撚加工機の概略構成図である。
【0011】
本実施形態において延伸仮撚加工機100は、給糸パッケージ101の糸Yを供給する給糸部102と、この給糸部102から供給される糸Yに対して延伸仮撚加工処理を施す糸加工処理部103と、糸加工処理部103により延伸仮撚加工処理が施された糸Yを巻き取って所定径の巻取パッケージPを形成する巻取部104と、を含んで構成される錘105を複数で備える。複数の錘105は、本図の紙面垂直方向に並設される。延伸仮撚加工機100をコンパクトとすることを目的として、図1に示されるように、給糸部102や巻取部104は上下に重ねて配される。
【0012】
給糸パッケージ101は、複数の錘105で共通のクリールスタンド106のペグ107に保持される。
【0013】
糸加工処理部103は、糸Yの走行方向に沿って順に、第一フィードローラ108と、一次ヒータ109と、冷却器110と、ベルト式仮撚装置111と、第二フィードローラ114と、インタレースノズル115と、二次ヒータ116と、第三フィードローラ117と、を備えて構成される。
【0014】
第一フィードローラ108と第二フィードローラ114の間で糸Yが延伸されるように、第二フィードローラ114の糸送り速度は、第一フィードローラ108の糸送り速度と比較して大きく設定される。一方、第二フィードローラ114と第三フィードローラ117の間で糸Yが弛緩されるように、第三フィードローラ117の糸送り速度は、第二フィードローラ114の糸送り速度と比較して小さく設定される。
【0015】
ベルト式仮撚装置111は、一対の無端ベルトを相互に交差及び圧接させた状態で走行させることで走行する糸Yをニップしながら撚りを付与するものであって、この糸Yに付与された撚りはベルト式仮撚装置111から糸Yの走行方向上流側へ向かって第一フィードローラ108に至るまで伝播する。糸Yは、延伸されつつ撚りが付与された状態で一次ヒータ109で熱セットされた後、冷却器110で冷却され、ベルト式仮撚装置111を通過する際に解撚される。この延伸仮撚加工処理が施された糸Yには、インタレースノズル115において適宜に交絡部が形成されることで、加撚糸と同程度の集束性が付与される。その後、糸Yは、弛緩された状態で二次ヒータ116において所定の熱処理が施され、巻取部104において巻取パッケージPとして巻き取られる。
【0016】
次に、ベルト式仮撚装置111について説明する。図2は、本発明の一実施形態に係るベルト式仮撚装置の側面図である。図3は、図2の3−3線矢視断面図である。図4は、ベルト式仮撚装置内における糸道の概略図である。
【0017】
図2に示されるように、ベルト式仮撚装置111は、基準側のベルトとしての基準ベルト1と、可動側のベルトとしての可動ベルト2と、を備え、前記の基準ベルト1及び可動ベルト2を走行させつつ互いに近接させることで、前記の基準ベルト1及び可動ベルト2に挟まれながら走行する糸Yに対して撚りを付与する。即ち、ベルト式仮撚装置111は、基準ベルト1を含む基準ベルトユニット3と、可動ベルト2を含む可動ベルトユニット4と、を備える。これら基準ベルトユニット3・可動ベルトユニット4は互いに概ね対称の構造とされるので、以下、主として、可動ベルトユニット4の構造を詳細に説明する。
【0018】
可動ベルトユニット4は、延伸仮撚加工機100本体に対して固定されるユニットベース5と、このユニットベース5に対して摺動可能な可動ベルト支持体6と、前記の可動ベルト2と、から構成される。可動ベルト支持体6は、ユニットベース5内に収容される駆動部7と、この駆動部7から突設されるプーリ駆動軸収容筒8と、このプーリ駆動軸収容筒8の先端に配され、該プーリ駆動軸収容筒8内に収容される図略の駆動シャフトによって回転駆動される駆動プーリ10と、この駆動プーリ10と対を成し、駆動プーリ10と共に可動ベルト2が掛けられる従動プーリ11と、これら駆動プーリ10及び従動プーリ11に掛けられる可動ベルト2に対して所定の張力を付与するための張力付与部12と、を主たる構成として備える。張力付与部12は、従動プーリ11を回転可能に支持する従動プーリ支持体9と、上記のプーリ駆動軸収容筒8と、の間に介挿される略示の圧縮コイルスプリング13を含んで構成される。
【0019】
本実施形態において駆動プーリ10と従動プーリ11に掛けられる可動ベルト2は、可撓性を有する無端ベルトであって、そのベルト幅は概ね8〜12[mm]とされる。前記のプーリ駆動軸収容筒8は概ね基準ベルトユニット3へ向かって延在し、可動ベルトユニット4によって支持される可動ベルト2が、基準ベルトユニット3に支持される基準ベルト1と接触可能に構成される。基準ベルト1と可動ベルト2が糸Yを挟むとき、本図に示されるように、可動ベルト2に対して対向する基準ベルト1の部分としての基準ベルト対向面1aと、基準ベルト1に対して対向する可動ベルト2の部分としての可動ベルト対向面2aと、は略平行とされる。そして、本実施形態において可動ベルト2は、基準ベルト対向面1aと、可動ベルト対向面2aと、の平行な関係を維持しながら基準ベルト1に対して進退可能に構成される。即ち、可動ベルト2を支持する可動ベルト支持体6の駆動部7は、ユニットベース5内において、可動ベルト対向面2aに対して垂直な方向へ摺動するように構成される。
【0020】
図3に示されるように、ユニットベース5には上記の可動ベルト対向面2aに対して垂直な方向に沿う略示のガイドシャフト15が挿設され、このガイドシャフト15と図示しないリニアブッシングを介して、駆動部7はユニットベース5に対して連結される。この構成で、可動ベルト2は、基準ベルト対向面1aと、可動ベルト対向面2aと、の平行な関係を維持しながら基準ベルト1に対して進退可能とされる。加えて、上記の駆動部7には上記のガイドシャフト15の挿設方向と平行に延びるキー溝16が刻設され、このキー溝16内に収容されるキー17がユニットベース5に設けられ、このキー溝16及びキー17の存在により、ガイドシャフト15まわりの駆動部7の回転が規制されるようになっている。前記のプーリ駆動軸収容筒8は、本図に示されるように駆動部7に対して嵌入され、駆動プーリ10に連結される駆動シャフト9はプーリ駆動軸収容筒8に対して略同軸の関係とされる。
【0021】
ユニットベース5には、基準ベルト1に対して近接する方向Aへ可動ベルト2を付勢する可動ベルト近接付勢部18(可動ベルト近接付勢手段)と、基準ベルト1から離反する方向Bへ可動ベルト2を付勢する可動ベルト離反付勢部19と、基準ベルト1から離反する方向Bへ可動ベルト2を移動させる可動ベルト移動部20(可動ベルト移動手段)と、が設けられる。
【0022】
この可動ベルト近接付勢部18は、本実施形態において空気圧式に構成されることで、可動ベルト2に対して付与する付勢力を増減可能に構成される。可動ベルト近接付勢部18は、具体的には、図略の圧縮空気供給装置に接続されるエア供給口21と、エア供給口21を介して供給される圧縮空気によって駆動される図略のベロフラムを内蔵する可動ベルト近接付勢部本体22と、このベロフラムの動作に連動する出力ロッド23と、から構成される。この出力ロッド23は、ガイドシャフト15の挿設方向と平行となるように配され、エア供給口21を介して可動ベルト近接付勢部本体22に圧縮空気が供給されると駆動部7に形成されるロッド当接面7aに当接し、圧縮空気によりベロフラムを介して出力ロッド23に作用される圧力が駆動部7に伝達されるように構成される。この可動ベルト近接付勢部18は、駆動部7に伝達される上記圧力(エアー圧)が、基準ベルト1に対して近接する方向Aへ可動ベルト2を付勢するのに供されるように構成される。即ち、可動ベルト2から基準ベルト1を望む方向と、可動ベルト近接付勢部本体22から出力ロッド23乃至ロッド当接面7aを望む方向と、は同じの方向である。
【0023】
上記の可動ベルト離反付勢部19は、本実施形態においてバネ式に構成され、具体的には、ガイドシャフト15の挿設方向と平行な方向に摺動可能な態様でユニットベース5に支持されるバネ収容体24と、このバネ収容体24と駆動部7の間に介設される圧縮コイルスプリング25と、バネ収容体24をガイドシャフト15の挿設方向と平行な方向に進退移動させるネジ式偏心カム26と、から構成される。上記のバネ収容体24と圧縮コイルスプリング25と駆動部7は、バネ収容体24と駆動部7の間に介設される圧縮コイルスプリング25の自己弾性復元力が可動ベルト2を基準ベルト1から離反させる方向Bへ付勢するのに供されるように配置される。従って、可動ベルト近接付勢部18によって可動ベルト2に対して付与される付勢力と、可動ベルト離反付勢部19によって可動ベルト2に対して付与される付勢力と、は反対の方向に作用するように構成される。ネジ式偏心カム26は、バネ収容体24をガイドシャフト15の挿設方向と平行な方向に進退移動させることで、可動ベルト離反付勢部19によって可動ベルト2に対して付与される付勢力を調節するためのものである。
【0024】
上記の可動ベルト移動部20は、本実施形態においてカム駆動式に構成され、具体的には、ガイドシャフト15の挿設方向と平行な方向に摺動可能な態様でユニットベース5に支持される進出ロッド27と、先端に進出ロッド27と係合する切欠部を有し、この進出ロッド27を進出させるための、カム式ノブ28と、から構成される。このカム式ノブ28による進出ロッド27の進出方向は、可動ベルト2が基準ベルト1から離反する方向と同一の方向に設定され、進出ロッド27がカム式ノブ28との係合により進出すると、進出ロッド27が駆動部7に対して当接し、当該駆動部7を介して可動ベルト2が基準ベルト1から離反するように構成される。カム式ノブ28による進出ロッド27の進出が解除されたときに進出ロッド27が駆動部7から離反する方向へ短時間で退避するよう、進出ロッド27とユニットベース5の間に圧縮コイルスプリング29が介設される。
【0025】
図2及び図4に示されるように、基準ベルトユニット3の駆動プーリ10には、外周縁50aを有する解撚ディスク50(解撚部)が図示しないボルトなどの締結手段によって連結固定される。この解撚ディスク50は、例えば、ステンレスやセラミックなどの剛体とされ、駆動プーリ10に対して固定されることで、駆動プーリ10と共回りする。換言すれば、解撚ディスク50は積極回転するようになっている。そして、この解撚ディスク50の外周縁50aの外径Dは、駆動プーリ10の外径に、基準ベルト1の厚みを二回、加えて得られる値以上に設定される。換言すれば、上記解撚ディスク50の外周縁50aの外径Dは、図4に示されるように、駆動プーリ10に巻き掛けられる基準ベルト1よりも更に外周側に突出する(はみ出る)ように設定される。この構成で、一対の基準ベルト1及び可動ベルト2が交差する部分である交差部Rよりも下流側の糸Yの糸道は、本図に示されるように、解撚ディスク50の外周縁50aとの接触により屈曲されるようになっている。なお、この接触は、本図に示されるように、解撚ディスク50の外周縁50aに沿ったかたちの線接触ではなく、糸Yと外周縁50aが交差することを特徴とする点接触となる。本実施形態では、更に、解撚ディスク50の外周縁50a近傍には、図4に示されるように、糸Yの糸道の下流側へ向かって狭窄されるテーパ外周面50bが形成される。そして、このテーパ外周面50bに対して、糸Yは接触摩擦可能に構成される。テーパ外周面50bと糸Yとの接触は、微視的に見れば線接触となっている。
【0026】
更に、解撚ディスク50の下流側には、図2に示されるように、走行する糸Yに対して従動回転する断面略V字状の屈曲ガイド51が設けられる。この屈曲ガイド51は、上記解撚ディスク50の外周縁50aにおける上記糸Yの糸道の屈曲を強める。即ち、図4に示されるように、基準ベルト1と可動ベルト2によってニップされて送糸された糸Yは、若干の走行を経て、解撚ディスク50の外周縁50a上で屈曲され、更に若干の走行を経て、屈曲ガイド51によって上記屈曲の略反対の方向へ屈曲される。
【0027】
次に、本実施形態に係るベルト式仮撚装置111の作動について説明する。
【0028】
先ず、基準ベルト1と可動ベルト2の間に、加撚対象としての糸Yの太さよりも十分大きな間隙が存在しており、この糸Yは、図2に示される太線矢印で示される方向へ走行しているものとする。
【0029】
<加撚の開始>
この状態で、糸Yに対する加撚を開始するには、先ず、図示しないモータによって駆動プーリ10を所定の回転数で回転させて、可動ベルト2を所定速度で走行させた状態とする。この可動ベルト2の走行方向は本図において太線矢印で示される方向である。基準ベルトユニット3についても同様とする。
【0030】
次に、図3に示される可動ベルト近接付勢部18に所定圧力の圧縮空気を導入して出力ロッド23を進出させる。これにより、出力ロッド23が駆動部7のロッド当接面7aに当接し、出力ロッド23が可動ベルト近接付勢部本体22から受ける圧力が駆動部7に伝達されることで、駆動部7は、可動ベルト離反付勢部19に属する圧縮コイルスプリング25の自己弾性復元力に抗するかたちで、ガイドシャフト15の挿設方向に沿って摺動し、もって、可動ベルト2が基準ベルト1に対して近接する。やがて、可動ベルト2が糸Yに対して当接すると、出力ロッド23が可動ベルト近接付勢部本体22から受ける圧力が、糸Yに対する可動ベルト2の接圧(糸Yに対する基準ベルト1の接圧)に変換される。
【0031】
基準ベルト1及び可動ベルト2の走行方向は、何れも、糸Yに対して所定の角度を有しており、もって、基準ベルト1及び可動ベルト2の走行は、糸Yを送出する機能と、糸Yに対して加撚トルクを付与する機能と、を発揮するようになっている。
【0032】
<加撚の停止:1>
上記の状態で、糸Yに対する加撚を停止するときは、先ず、可動ベルト近接付勢部18に対する圧縮空気の供給を停止すると共に、既に可動ベルト近接付勢部18に対して供給された圧縮空気を抜くことで、可動ベルト近接付勢部18によって駆動部7に対して付与される付勢力を消失させる。すると、糸Yに対する可動ベルト2の接圧が消失されると共に、可動ベルト離反付勢部19によって駆動部7に対して付与される付勢力により駆動部7は可動ベルト2を基準ベルト1から離反させる方向へ移動(退避)し、基準ベルト1と可動ベルト2の間に糸Yの太さと比較して十分大きな間隙が生成され、もって、糸Yに対する加撚が停止する。
【0033】
<加撚の停止:2>
例えば基準ベルト1や可動ベルト2を交換するときは、カム式ノブ28を適宜回転させておくとよい。これによれば、進出ロッド27がカム式ノブ28との係合により進出し、駆動部7が、可動ベルト2が基準ベルト1から離反する方向へ移動(退避)し、基準ベルト1と可動ベルト2の間に十分大きな間隙が生成されるからである。付言ならば、可動ベルト近接付勢部18によって駆動部7に対して付勢力が付与されているときは、ガイドシャフト15の挿設方向に沿った駆動部7の進退は、択一的に、進出ロッド27の進出量か、それとも圧縮コイルスプリング25によって駆動部7に対して付与される付勢力に支配されることとなる。一方、可動ベルト近接付勢部18によって駆動部7に対して付勢力が付与されていないときは、ガイドシャフト15の挿設方向に沿った駆動部7の進退は、圧縮コイルスプリング25によって駆動部7に対して付与される付勢力に支配されることとなる。
【0034】
<接圧の調整>
ところで、糸Yに対する加撚の際に、可動ベルト近接付勢部18に対して所定圧力の圧縮空気を供給することで発生する、糸Yに対する可動ベルト2の接圧(糸Yに対する基準ベルト1の接圧)を調整するには、ネジ式偏心カム26を何れかの方向に回転させればよい。即ち、糸Yに対する加撚の際は、可動ベルト近接付勢部18によって駆動部7に対して付与される付勢力が、糸Yに対する可動ベルト2の接圧と、可動ベルト離反付勢部19によって駆動部7に対して付与される付勢力と、の合力と等しくなっているので、この関係において、ネジ式偏心カム26を何れかの方向に回転させると、可動ベルト離反付勢部19によって駆動部7に対して付与される付勢力が増減し、相対的に、糸Yに対する可動ベルト2の接圧が変化するからである。全体(例えば1機台240錘)の接圧調整(糸の種類により)は、空気圧力を変えることにより全錘一斉に行う。ネジ式偏心カム26による調整は、一斉に行われる上記の調整後、接圧力を測定し、この接圧力が各錘でバラついたときに調整するために使用される。
【0035】
<解撚ディスク50の作用>
次に、図5及び図6に基づいて、上記の解撚ディスク50の作用を詳細に説明する。図5は、解撚張力T2が低い場合の解撚ポイントを示す図である。図6は、解撚張力T2が高い場合の解撚ポイントを示す図である。なお、図5及び図6において、前述の交差部R内に存在する糸Yは通常の状態においては見ることができないが、解撚ポイントの位置を説明するためにあえて基準ベルト1の手前側に描いた。
【0036】
解撚張力T2が低い場合は、図5(a)に示されるように、解撚ポイントは基準ベルト1と可動ベルト2の交差部Rの下流側の端に位置する。しかし、解撚張力T2が高い場合は、図6(a)に示されるように、解撚ポイントが基準ベルト1と可動ベルト2の交差部R内に進入してしまう。この結果、解撚された上記糸Yが基準ベルト1及び可動ベルト2に対して擦れ合って毛羽立ちが発生してしまう。これに対し、上記解撚ディスク50を含む上記実施形態の構成では、図5(b)及び図6(b)に示されるように、解撚張力T2の高低に拘わらず、解撚ポイントが常に解撚ディスク50の外周縁50a上に固定される。従って、解撚ポイントが基準ベルト1と可動ベルト2の交差部R内に進入してしまうことがないので、毛羽立ちの発生を抑制できる。
【0037】
更には、屈曲ガイド51の存在により解撚ディスク50における上記糸Yの糸道の屈曲が強められているので、上記糸Yの解撚ポイントの安定が一層高いレベルで実現される。
【0038】
次に、上記の解撚ディスク50の技術的効果を確認するための試験について説明する。下記表1において、実施例とあるのは図5(a)に示される構成に解撚ディスク50を付加した構成に関し、比較例とあるのは図5(a)に示される構成に関する。下記表1において、試験No.1〜3の糸種は75den/144fであって、糸速は600m/minである。試験No.4〜6の糸種は150den/288fであって、糸速は600m/minである。表中、「解撚張力T2 gr」とあるのは、ベルト式仮撚装置111よりも下流側の糸Yの張力を意味し、単位のgrはグラムを意味する。「B.F/1000m」とあるのは、1000mあたりの毛羽数を意味する。
【0039】
【表1】
【0040】
上記表1の比較例によれば、解撚張力T2が高いと毛羽の発生が顕著であることが判る。そして、上記の解撚ディスク50を採用した実施例では、解撚張力T2の大小に拘わらず比較例と比較して毛羽数が略半数近くに抑えられたことが判る。毛羽は一般に解撚ポイントがベルト間に進入したときに発生することから、上記実施例では、解撚ポイントのベルト間への進入が抑えられ、これは他ならぬ、解撚ポイントが安定して固定されたからだと考えられる。
【0041】
(まとめ)
以上説明したように上記実施形態においてベルト式仮撚装置111は以下のように構成される。即ち、ベルト式仮撚装置111は、基準ベルト1・可動ベルト2を相互に交差及び圧接させた状態で走行させることで糸Yをニップしながら撚りを付与する。基準ベルト1が巻き掛けられる駆動プーリ10には、外周縁50aを有する解撚ディスク50が設けられる。この解撚ディスク50は、前記駆動プーリ10と共回りするように構成される。この解撚ディスク50の外周縁50aにおける外径Dは、前記駆動プーリ10の外径に前記基準ベルト1の厚みを加えて得られる値以上に設定される。交差部Rよりも下流側の前記糸Yの糸道は、前記解撚ディスク50の外周縁50aとの接触により屈曲される。以上の構成によれば、前記解撚ディスク50の外周縁50aにおける周速が、前記交差部R内における前記糸Yの周速を上回るので、前記交差部Rで付与された前記糸Yの撚りを、前記解撚ディスク50の外周縁50aに至るまで維持することができ、もって、前記糸Yの解撚ポイントが前記解撚ディスク50の外周縁50a上に固定される。また、前記解撚ディスク50の外周縁50aにおける外径Dが基準ベルト1よりも外周側へ突出する構成により、前記の交差部Rと解撚ディスク50の間の区間における前記糸Yの糸道を、前記交差部R内における前記糸Yの糸道と略一直線とすることが可能となる。そして、このように略一直線な糸道を採用した場合は、前記交差部Rの下流側終端における基準ベルト1及び可動ベルト2の偏摩耗が回避される。
【0042】
なお、上記実施形態では、前記の交差部Rと解撚ディスク50の間の区間における前記糸Yの糸道が、前記交差部R内における前記糸Yの糸道と略一直線となるように、解撚ディスク50の外周縁50aにおける外径Dが設定されている。
【0043】
なお、例えば、上記の解撚ディスク50が積極回転せず、糸Yとの接触により回転するように構成する場合は、前記解撚ディスク50の外周縁50aにおける周速が、前記交差部R内における前記糸Yの周速を上回ることはなく、従って、前記交差部Rで付与された前記糸Yの撚りを、前記解撚ディスク50の外周縁50aに至るまで維持することが全くできない。また、上記の解撚ディスク50を積極回転させる構成としても、前記解撚ディスク50の外周縁50aにおける周速が、前記交差部R内における前記糸Yの周速を上回る程度には高速回転させない場合は、前記交差部Rで付与された前記糸Yの撚りを、前記解撚ディスク50の外周縁50aに至るまで完全には維持できない。
【0044】
上記のベルト式仮撚装置111は、以下の構成を採用することができる。即ち、前記解撚ディスク50の外周縁50aにおける前記糸Yの糸道の屈曲を強めるように前記糸Yをガイドする屈曲ガイド51が設けられる。以上の構成によれば、前記解撚ディスク50の外周縁50aにおける前記糸Yの糸道の屈曲が強まるので、この屈曲により実現される前記糸Yの解撚ポイントの安定が一層高いレベルで実現される。
【0045】
以上に本発明の好適な実施形態を説明したが、上記の実施形態は以下のように変更して実施することができる。
【0046】
図7は、図2に類似する図であって、本発明の他の実施形態を示す図である。本図に示されるように、上記実施形態に係る解撚ディスク50に代えて、可動ベルトユニット4の従動プーリ11の外周面に環状の突条部52(解撚部)を突設することとしてもよい。換言すれば、駆動プーリ10と別体である解撚ディスク50に代えて、従動プーリ11と一体である突条部52を採用してもよい。即ち、解撚ディスク50や突条部52などの解撚部は、プーリ(10、11)に対して別体であっても一体であってもよい。解撚部を別体とした構成は前記解撚部のみを交換できる点で優れ、解撚部を一体とした構成は部品点数の削減に寄与する。何れの場合であっても、図6(b)で示すような、解撚張力T2が高い場合における解撚ポイントの固定が実現される。また、この場合でも、上記実施形態と同様、突条部52による上記糸Yの糸道の屈曲を強めるように上記糸Yをガイドする屈曲ガイドを設けることが好ましい。
【図面の簡単な説明】
【0047】
【図1】本発明の一実施形態に係る延伸仮撚加工機の概略構成図
【図2】本発明の一実施形態に係るベルト式仮撚装置の側面図
【図3】図2の3−3線矢視断面図
【図4】ベルト式仮撚装置内における糸道の概略図
【図5】解撚張力T2が低い場合の解撚ポイントを示す図
【図6】解撚張力T2が高い場合の解撚ポイントを示す図
【図7】図2に類似する図であって、本発明の他の実施形態を示す図
【符号の説明】
【0048】
1 基準ベルト
2 可動ベルト
10 駆動プーリ
11 従動プーリ
50 解撚ディスク
111 ベルト式仮撚装置
【特許請求の範囲】
【請求項1】
一対の無端ベルトを相互に交差及び圧接させた状態で走行させることで糸をニップしながら撚りを付与する、ベルト式仮撚装置であって、
前記無端ベルトが巻き掛けられるプーリには、外周縁を有する解撚部が設けられ、
この解撚部は、前記プーリと共回りするように構成され、
この解撚部の外周縁の外径は、前記プーリの外径に前記無端ベルトの厚みを加えて得られる値以上に設定され、
前記一対の無端ベルトが交差する部分である交差部よりも下流側の前記糸の糸道は、前記解撚部の外周縁との接触により屈曲される、
ことを特徴とする、ベルト式仮撚装置。
【請求項2】
請求項1に記載のベルト式仮撚装置であって、
前記解撚部は、前記プーリと別体として構成される、
ことを特徴とする、ベルト式仮撚装置。
【請求項3】
請求項1に記載のベルト式仮撚装置であって、
前記解撚部は、前記プーリと一体として構成される、
ことを特徴とする、ベルト式仮撚装置。
【請求項4】
請求項1〜3の何れかに記載のベルト式仮撚装置であって、
前記解撚部の外周縁における前記糸の糸道の屈曲を強めるように前記糸をガイドする屈曲ガイドが設けられる、
ことを特徴とする、ベルト式仮撚装置。
【請求項1】
一対の無端ベルトを相互に交差及び圧接させた状態で走行させることで糸をニップしながら撚りを付与する、ベルト式仮撚装置であって、
前記無端ベルトが巻き掛けられるプーリには、外周縁を有する解撚部が設けられ、
この解撚部は、前記プーリと共回りするように構成され、
この解撚部の外周縁の外径は、前記プーリの外径に前記無端ベルトの厚みを加えて得られる値以上に設定され、
前記一対の無端ベルトが交差する部分である交差部よりも下流側の前記糸の糸道は、前記解撚部の外周縁との接触により屈曲される、
ことを特徴とする、ベルト式仮撚装置。
【請求項2】
請求項1に記載のベルト式仮撚装置であって、
前記解撚部は、前記プーリと別体として構成される、
ことを特徴とする、ベルト式仮撚装置。
【請求項3】
請求項1に記載のベルト式仮撚装置であって、
前記解撚部は、前記プーリと一体として構成される、
ことを特徴とする、ベルト式仮撚装置。
【請求項4】
請求項1〜3の何れかに記載のベルト式仮撚装置であって、
前記解撚部の外周縁における前記糸の糸道の屈曲を強めるように前記糸をガイドする屈曲ガイドが設けられる、
ことを特徴とする、ベルト式仮撚装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−65354(P2010−65354A)
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願番号】特願2008−234266(P2008−234266)
【出願日】平成20年9月12日(2008.9.12)
【出願人】(000006297)村田機械株式会社 (4,916)
【出願人】(502455511)TMTマシナリー株式会社 (91)
【Fターム(参考)】
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願日】平成20年9月12日(2008.9.12)
【出願人】(000006297)村田機械株式会社 (4,916)
【出願人】(502455511)TMTマシナリー株式会社 (91)
【Fターム(参考)】
[ Back to top ]