
ベルト式無段変速機の制御装置
【課題】ベルト式無段変速機のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することのできるベルト式無段変速機の制御装置を提供する。
【解決手段】入力側及び出力側の2つのプーリに架け渡されたベルト15のそれら2つのプーリに対する巻掛半径を変更することで変速を行うベルト式無段変速機12は、車両の動力源たるエンジン10の発生するトルクを主駆動輪である前輪16のみに伝達して走行を行う二輪駆動走行と上記トルクを前輪16と副駆動輪である後輪21の双方に伝達して走行を行う四輪駆動走行とを状況に応じて切り替える車両に搭載されている。こうしたベルト式無段変速機12の制御を行う電子制御ユニット23は、後輪21へのトルク配分の開始に応じて、ベルト式無段変速機12のプーリのベルト挟圧を調整することで、車両部材の弦振動との共振に起因した篭り音の発生を抑制するようにした。
【解決手段】入力側及び出力側の2つのプーリに架け渡されたベルト15のそれら2つのプーリに対する巻掛半径を変更することで変速を行うベルト式無段変速機12は、車両の動力源たるエンジン10の発生するトルクを主駆動輪である前輪16のみに伝達して走行を行う二輪駆動走行と上記トルクを前輪16と副駆動輪である後輪21の双方に伝達して走行を行う四輪駆動走行とを状況に応じて切り替える車両に搭載されている。こうしたベルト式無段変速機12の制御を行う電子制御ユニット23は、後輪21へのトルク配分の開始に応じて、ベルト式無段変速機12のプーリのベルト挟圧を調整することで、車両部材の弦振動との共振に起因した篭り音の発生を抑制するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、四輪駆動機能を備えた車両に搭載されるベルト式無段変速機の制御装置に関する。
【背景技術】
【0002】
近年、車載用の変速機として、無段階に変速比を変更可能な無段変速機(CVT:Continuously Variable Transmission)の採用が進められている。そして現状では、車載用の無段変速機としては、可変径式の一対のプーリとそれらプーリに架け渡されるベルトとを組合せたベルト式無段変速機が主流となっている。ベルト式無段変速機は、入力側及び出力側の2つのプーリのベルト巻掛半径の比(プーリ比)を変更することで、変速を行うように構成されている。
【0003】
こうしたベルト式無段変速機では、プーリに対してベルトは微小なすべりを起しながらトルクを伝達しており、すべりを伴う運動はμ−V特性を有することから、無段変速機の動作中には、ベルトを加振するエネルギが常に発生している。一方、2つのプーリに架け渡されたベルトには、いずれのプーリとも接触していない弦部が存在するため、無段変速機の動作に伴ってそうしたベルト弦部に弦振動が発生するようになる。
【0004】
従来、こうしたベルト式無段変速機の弦振動に着目した発明として、特許文献1に記載のものが知られている。この特許文献1に記載の発明では、ベルト弦部の弦振動の増大をもってベルト挟圧の不足によるベルト滑りの発生を検知し、その発生の検知時には、プーリのベルト挟圧を増加させてベルト滑りを防止するようにしている。
【特許文献1】特開2001−108082号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、上記のようなベルト弦部の弦振動の周波数が車両部材の固有振動数と適合して共振現象が起きることで、車両の乗員に違和感を与えるような篭り音が発生することがある。こうした篭り音は、以下に述べるように、四輪駆動車において特に顕著となる。
【0006】
四輪駆動車として、前後輪のトルク分配率を状況に応じて可変とするものがある。そして主駆動輪(例えば前輪)のみにトルクを配分して走行を行う二輪駆動走行と主駆動輪及び副駆動輪(例えば後輪)の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものがある。こうした四輪駆動車では、副駆動輪は、四輪駆動走行時に変速機と駆動連結され、二輪駆動走行時にはその駆動連結が解除される。そのため、二輪駆動走行から四輪駆動走行への切り替えに際しては、ベルト式無段変速機のベルト弦部の弦振動の伝達範囲が拡張されるようになり、二輪駆動走行時には殆んど弦振動が伝達されていなかった部材にも四輪駆動走行時には弦振動が伝達されるようになる。したがって二輪駆動走行時には、ベルト弦部の弦振動と共振を起こす部材が存在していなくても、四輪駆動走行時には弦振動の伝達範囲の拡張に応じて共振現象が発生してしまうことがある。
【0007】
こうした共振現象の発生を回避するには、弦振動の伝達範囲に設置された部材の固有振動数が弦振動の周波数と適合しないように各部材を設計する必要がある。しかしながら、弦振動の伝達範囲に存在するすべての部材についてそうした設計を行うことは困難であり、ましてや四輪駆動走行時の拡張された弦振動の伝達範囲に存在する部材のすべてにそうした設計を適用することは尚更困難となる。
【0008】
なお、二輪駆動走行と四輪駆動走行とを切り替え可能な四輪駆動車の多くは、二輪駆動車をベースとして開発されている。ここでベースとなった二輪駆動車では、ベルト式無段変速機のベルト弦部の弦振動との共振現象が発生しないように設計がなされていたとしても、四輪駆動としたときには弦振動との共振現象の発生する部材が存在してしまうことがある。こうした場合、共振を起こす部材を皆無とするには、四輪駆動機能の追加に際してベース車両からの大幅な設計変更が必要となってしまう。そのため、四輪駆動走行時における篭り音の発生については、その防止をある程度のところで妥協せざるを得ないのが実情となっている。
【0009】
ちなみに、四輪駆動走行を常時行う四輪駆動車でも、前後輪のトルク配分を状況に応じて切り替えるものでは、そのトルク配分の変更に応じて、車両各部への上記弦振動の伝達状況が変化する。例えば後輪へのトルク分配率が小さいときには、殆ど弦振動の影響を殆ど受けない部材でも、後輪へのトルク分配率が大きくなると、弦振動の影響が無視し得ないほど大きくなることがある。そのため、四輪駆動走行を常時行う四輪駆動車でも、前後輪のトルク配分を変更するものであれば、同様の問題が生じることがある。
【0010】
本発明は、こうした現状に鑑みてなされたものであって、その解決しようとする課題は、ベルト式無段変速機のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することのできるベルト式無段変速機の制御装置を提供することにある。
【課題を解決するための手段】
【0011】
以下、上記課題を解決するための手段、及びその作用効果を記載する。
上記課題を解決するため、請求項1に記載の発明は、前後輪のトルク配分を可変とする四輪駆動車に搭載されて、入力側及び出力側の2つのプーリに架け渡されたベルトの前記2つのプーリに対する巻掛半径を変更することで変速を行うベルト式無段変速機の制御を行う装置であって、前記前後輪のトルク配分に応じて、前記プーリのベルト挟圧を調整する挟圧調整手段を備えることをその要旨としている。
【0012】
前後輪のトルク配分が変化すると、ベルト式無段変速機のベルト弦部の弦振動の伝達範囲が変わり、それまで未伝達の車両部材にも弦振動が伝達されるようになったり、車両部材に伝達される弦振動の強さが変化したりするようになる。そしてその結果、それまで弦振動とは無関係だった部材にまで弦振動の影響が及ぶようになり、各部材との共振を十分に抑え得る適切な弦振動の周波数が変化するようになる。
【0013】
その点、上記構成では、前後輪のトルク配分の変化に応じてプーリのベルト挟圧が調整されるようになっている。プーリのベルト挟圧を変更すれば、ベルトの張力が変化して弦振動の周波数を変化させることができる。よって上記構成では、前後輪のトルク配分の変化に応じて弦振動との共振を十分に抑制可能な弦振動周波数の範囲が変化しても、それに対応して弦振動の周波数を実際に変化させることが可能となる。したがって上記構成によれば、ベルト式無段変速機のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することができるようになる。
【0014】
請求項2に記載の発明は、請求項1に記載のベルト式無段変速機の制御装置において、当該四輪駆動車は、主駆動輪のみにトルクを配分して走行を行う二輪駆動走行と前記主駆動輪及び副駆動輪の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものであって、前記挟圧調整手段は、前記副駆動輪へのトルク配分の開始に応じて前記ベルト挟圧の調整を行うことをその要旨としている。
【0015】
上記のような四輪駆動車での二輪駆動走行から四輪駆動走行への切り替え、すなわち副駆動輪へのトルク配分の開始に際しては、ベルト式無段変速機のベルト弦部で発生する弦振動の伝達範囲が大幅に拡大される。そしてその結果、弦振動の影響を受ける車両部材の範囲が大きく変化する。そのため、副駆動輪へのトルク配分の開始に際しては、それまで弦振動とは無関係だった車両部材にも弦振動が伝達されるようになり、副駆動輪へのトルク伝達の開始と共に弦振動による車両部材の共振が発生することがある。その点、上記構成では、副駆動輪へのトルク配分の開始に応じてベルト挟圧の調整が行われるため、篭り音の原因となる弦振動による車両部材の共振を好適に抑制することができるようになる。
【0016】
請求項3に記載の発明は、請求項2に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、前記副駆動輪に伝達される前記トルクの大きさに基づいて前記ベルト挟圧の調整量を決定することをその要旨としている。
【0017】
各車両部材への弦振動の伝達状況は、副駆動輪に配分されるトルクの大きさにより変化することから、弦振動との共振を起こし得る部材の範囲も、副駆動輪に配分されるトルクの大きさにより変化する。そのため、車両部材の共振を十分に抑制可能な弦振動周波数の適正値も、副駆動輪への伝達トルクの大きさにより変化することがある。その点、上記構成では、ベルト挟圧の調整量が、副駆動輪に配分されるトルクの大きさにより決定されるため、弦振動による車両部材の共振をより的確に抑制することが可能となる。
【0018】
請求項4に記載の発明は、請求項2に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、前記副駆動輪へのトルク分配率を可変とする電子制御カップリングの入力トルクと、前記ベルト式無段変速機の変速比とに基づいて前記ベルト挟圧の調整量を決定することをその要旨とする。
【0019】
上記のように副駆動輪に配分されるトルクの大きさによりベルト挟圧の調整量を決定することで、弦振動による車両部材の共振をより的確に抑制することが可能となる。このときの副駆動輪に配分されるトルクの大きさは、直接検出せずとも、電子制御カップリングの入力トルクとベルト式無段変速機の変速比とから概ね推定することができる。よって上記構成のように、それら入力トルクと変速比とベルト挟圧の調整量を決定する場合にも、弦振動による車両部材の共振をより的確に抑制することが可能となる。
【0020】
請求項5に記載の発明は、請求項1〜4のいずれか1項に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、前記ベルト挟圧の調整を該ベルト挟圧の上昇により行うことをその要旨としている。
【0021】
ベルト挟圧を上昇させれば、ベルト弦部の弦振動の周波数が変化するだけでなく、プーリに対するベルトの滑りが抑えられて弦振動の大きさ自体を小さくすることができる。そのため、上記構成のように、ベルト挟圧の調整を該ベルト挟圧の上昇により行うようにすれば、弦振動による車両部材の共振を、ひいては篭り音の発生をより効果的に抑制することができるようになる。
【0022】
請求項6に記載の発明は、請求項1〜5のいずれか1項に記載のベルト式無段変速機の制御装置において、当該四輪駆動車の操舵角の検出結果に基づいて前記前後輪のトルク配分の状態を確認することをその要旨としている。
【0023】
四輪駆動車では、4つの車輪のいずれかに空転(タイヤスリップ)が発生して、左右車輪の差動がある程度を超えて大きくなると、各車輪へのトルク配分を変更して、路面への駆動力伝達の維持を図るものがある。一方、左右車輪の差動量の増大は、操舵角がある程度よりも大きくなったときにも発生し、このときにも各車輪のトルク配分が変更される。このように、操舵角とトルク配分の状態との間には相関があり、各車輪へのトルク配分の状況を操舵角からある程度に把握することが可能である。よって上記構成のように、車両の操舵角の検出結果に基づくことでも、前後輪のトルク配分の状態を確認することができるようになる。
【0024】
請求項7に記載の発明は、請求項1〜6のいずれか1項に記載のベルト式無段変速機の制御装置において、当該四輪駆動車は、主駆動輪のみにトルクを配分して走行を行う二輪駆動走行と前記主駆動輪及び副駆動輪の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものであって、前記挟圧調整手段は、当該四輪駆動車の走行モードを前記四輪駆動走行に固定するための固定スイッチの操作状況に基づいて前記前後輪のトルク配分の状態を確認することをその要旨としている。
【0025】
四輪駆動車では、運転者の固定スイッチの操作に応じて車両の走行モードを四輪駆動走行に固定するようにしたものがある。こうした四輪駆動車では、そうした固定スイッチの操作状況に基づいて、前後輪のトルク配分の状態をある程度に確認することが可能となる。
【0026】
請求項8に記載の発明は、請求項1〜7のいずれか1項に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、前記ベルト式無段変速機の変速比が規定の範囲にあることを条件に、前記トルクの伝達状況に応じた前記ベルト挟圧の調整を実施することをその要旨としている。
【0027】
ベルト式無段変速機の変速比を変更すべくそのプーリ比を変化させると、ベルト弦部の弦長が変わり、弦振動の周波数が変化する。そのため、弦振動による車両部材の共振は、ベルト式無段変速機の変速比次第で発生したり、しなかったりする。ここで上記構成では、前後輪のトルク配分に応じたベルト挟圧の調整が、ベルト式無段変速機の変速比が規定の範囲にあることを条件に実施されるようになっている。そのため、ベルト式無段変速機の変速比が、そのままでは弦振動による車両部材の共振が発生するような領域にあるときに限り、ベルト挟圧の調整を実施することが可能となり、本来不要なベルト挟圧調整の実施を回避して、弦振動による車両部材の共振の抑制をより効率的に図ることができるようになる。
【0028】
請求項9に記載の発明は、請求項1〜8のいずれか1項に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、運転者の操作により選択された変速段に対応する変速比に前記ベルト式無段変速機の変速比を固定するシーケンシャルモードにあって、予め設定された特定の変速段が選択されていることを条件に、前記トルクの伝達状況に応じた前記ベルト挟圧の調整を実施することをその要旨としている。
【0029】
車両の変速モードとしてシーケンシャルモードが採用されている場合、シーケンシャルモード時には、運転者の操作により選択された変速段に対応する変速比となるようにベルト式無段変速機の変速比が設定される。こうした場合、上記のように弦振動の周波数はベルト式無段変速機の変速比によって変化するため、弦振動による車両部材の共振がシーケンシャルモードでの特定の変速段に限って発生することがある。ここで上記構成では、前後輪のトルク配分に応じたベルト挟圧の調整が、シーケンシャルモードにおいて予め設定された特定の変速段が選択されていることを条件に実施されるようになっている。そのため、そのままでは弦振動による車両部材の共振が発生するような変速段にあるときに限り、ベルト挟圧の調整を実施することが可能となり、本来不要なベルト挟圧調整の実施を回避して、弦振動による車両部材の共振の抑制をより効率的に図ることができるようになる。
【発明を実施するための最良の形態】
【0030】
(第1の実施の形態)
以下、本発明のベルト式無段変速機の制御装置を具体化した第1の実施の形態を、図1及び図2を参照して詳細に説明する。なお本実施の形態では、前輪を常時トルクの伝達される主駆動輪とし、後輪を必要時にのみトルクの伝達される副駆動輪とするパートタイム四輪駆動車に搭載のベルト式無段変速機を、本発明に係る制御装置の適用対象としたものとなっている。
【0031】
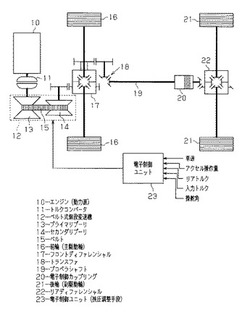
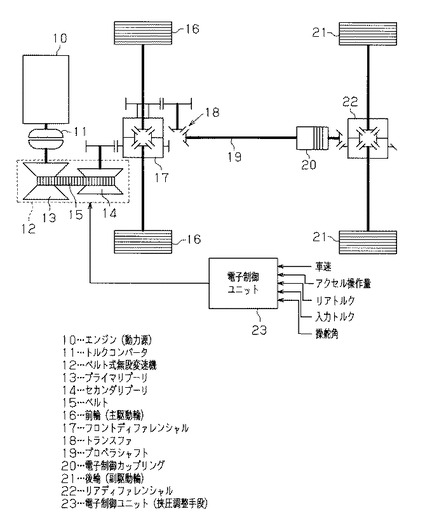
図1は、本実施の形態に係るベルト式無段変速機の制御装置の適用される四輪駆動車の駆動系の構成を示している。同図に示すように、当該四輪駆動車の駆動源であるエンジン10は、トルクコンバータ11を介してベルト式無段変速機12に接続されている。ベルト式無段変速機12は、可変径式の一対のプーリ、すなわち入力側のプライマリプーリ13及び出力側のセカンダリプーリ14と、それらに巻き掛けられるベルト15とを備え、両プーリのベルト巻掛半径の比(プーリ比)を変化させることで変速を行うように構成されている。こうしたベルト式無段変速機12での各プーリのベルト巻掛半径は、それらプーリに印加される油圧(シーブ圧)の調整により行われるようになっている。
【0032】
こうしたベルト式無段変速機12の出力側は、左右前輪16の差動を許容するフロントディファレンシャル17に連結され、そのフロントディファレンシャル17は変向機であるトランスファ18を介してプロペラシャフト19に連結されている。そしてプロペラシャフト19は、前輪16及び後輪21のトルク配分を変更する電子制御カップリング20を介して、左右後輪21の差動を許容するリアディファレンシャル22に接続されている。
【0033】
またこうした四輪駆動車には、ベルト式無段変速機12の制御を行う電子制御ユニット23が設置されている。電子制御ユニット23は、ベルト式無段変速機12の制御に係る各種演算処理を行う中央演算装置(CPU)、制御用のプログラムやデータの記憶された読出専用メモリ(ROM)、CPUの演算結果を一時記憶するランダムアクセスメモリ(RAM)、外部との信号の送受のための入出力ポート(I/O)を備えて構成されている。こうした電子制御ユニット23の入力ポートには、車両の各部に設置されたセンサによる、車速、アクセル操作量、電子制御カップリング20を介して後輪21側に伝達されるトルク(リアトルク)、電子制御カップリング20への入力トルク、車両の操舵角などの検出信号が入力されている。そして電子制御ユニット23は車両走行中、現在の走行状態において最適な変速比を車速とアクセル操作量とに基づき算出し、その算出した変速比が得られるようにベルト式無段変速機12の各プーリに印加されるシーブ圧を調整している。
【0034】
さて、こうした四輪駆動車に搭載のベルト式無段変速機12では、車両走行中に、両プーリに架け渡されたベルト15の弦部(いずれのプーリとも接触していない部分)が、ベルト−プーリ間の微小すべりにより加振されて振動する。このベルト弦部の振動(弦振動)は、エンジン10から各駆動輪へのトルク伝達経路等を通じて車両各部に伝達される。
【0035】
こうした弦振動の周波数fは、下式(1)にて求められる。下式(1)において「n」は任意の整数を、「L」は弦長(ベルト弦部の長さ)を、「T」はベルト15の張力を、「ρ」はベルト15の線密度をそれぞれ示している。なお、弦長Lはベルト式無段変速機12のプーリ比の変更、すなわち変速比の変更に応じて、ベルト15の張力Tは各プーリのベルト挟圧に応じて、それぞれ変化するものとなっている。
【数1】

【0036】
一方、弦振動の伝達された車両部材の固有振動数がその弦振動の周波数と適合すると、すなわち固有振動数が弦振動の周波数の「m/n」倍(m,n:任意の整数)と一致すると、その車両部材が共振現象を起こして、篭り音が発生する。ここで上記のような四輪駆動車では、電子制御カップリング20による前後輪のトルク配分の変更により、後輪21側へのエンジントルクの伝達状況が変化し、その結果、上記弦振動の伝達状況が変化して、弦振動の影響を受ける部材の範囲が変化する。例えば後輪21へのトルク伝達がなされていないときには、弦振動がほとんど伝達されていなかった部材でも、後輪21へのトルク伝達の開始と共に弦振動の影響が無視し得なくなることがある。そのため、弦振動の周波数fや大きさに変りがなくとも、前後輪のトルク配分が変化すれば、弦振動による車両部材の共振の発生状況に変化が生じることがある。
【0037】
そこで本実施の形態では、後輪21へのトルク配分の有無を監視し、その監視結果に応じてベルト式無段変速機12の各プーリのベルト挟圧を調整して弦振動の周波数fを変更することで、弦振動による車両部材の共振の発生を抑制するようにしている。このときのベルト挟圧の調整は、ベルト式無段変速機12の各プーリに印加されるシーブ圧を上昇させることで行われ、両プーリのシーブ圧を同時に上昇させて、プーリ比(変速比)を一定に維持したまま、ベルト挟圧が上昇するように行われる。
【0038】
なお本実施の形態の適用される四輪駆動車では、前輪16のみによる二輪駆動走行時には、弦振動との共振を起こす部材は存在しないようになっている。そして前輪16及び後輪21による四輪駆動走行が開始されると、それに伴う弦振動伝達範囲の拡張に応じて、弦振動との共振を起こし得る部材が存在するようになっている。そのため、本実施の形態では、後輪21へのトルク伝達の開始に応じて、そうしたベルト挟圧の調整を行うようにしている。
【0039】
ちなみに、このときのベルト挟圧の調整は、ベルト挟圧の調整可能範囲において、弦振動の周波数fが、そのときの後輪21へのトルクの伝達状況において弦振動の影響を受けるすべての車両部材の共振周波数(固有周波数及びその「n/m」倍の周波数)から外れるように行われる。ここでのベルト挟圧の調整可能範囲とはすなわち、ベルト15の滑りを防止可能なベルト挟圧の最小値とシーブ圧を設定可能な最大値としたときのベルト挟圧との間の範囲である。なお、弦振動の影響を受ける車両部材の範囲は、後輪21に伝達されるトルク(リアトルク)の大きさにより変化するため、車両部材の共振を回避可能な弦振動の周波数fの最適値は、リアトルクの大きさによって変化することになる。そこでここでは予め実験等で、共振の回避が可能な最適値に弦振動の周波数fを変化させることのできるシーブ圧の上昇代を、リアトルクの大きさ毎に求めておき、そうしたシーブ圧の上昇代とリアトルクとの関係を演算マップとして電子制御ユニット23のROMに記憶しておくようにしている。そして電子制御ユニット23は、上記ベルト挟圧の調整に際して、その演算マップを用いてそのときのリアトルクの大きさに応じた最適なシーブ圧の上昇代を求め、その求めた上昇代に応じてシーブ圧を調整するようにしている。
【0040】
また本実施の形態の適用される四輪駆動車では、タイヤスリップ時等を除いた通常の四輪駆動走行時には、前後輪のトルク配分が一定となっており、ベルト式無段変速機12の出力トルクと上記リアトルクとの間に線形関係が成り立っている。そこで本実施の形態では、上記リアトルクの大きさの指標値として、ベルト式無段変速機12の出力トルク(例えばセカンダリプーリ14のトルク)の検出値を用いて、上記シーブ圧の調整を行うようにしている。すなわち、実際には上記演算マップは、ベルト式無段変速機12の出力トルクとその出力トルクでの最適なシーブ圧の上昇代との関係が記憶されたものとなっている。
【0041】
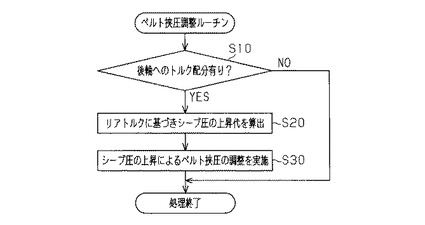
図2は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理は、車両走行中に時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。
【0042】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS10において、リアトルクの検出結果から後輪21へのトルク配分の有無を、すなわち後輪21のトルク配分率が「0」か、そうでないかを確認する。具体的には、ここでの後輪21へのトルク配分の有無の確認は、リアトルクが「0」であるか否かにより行われる。
【0043】
ここで電子制御ユニット23は、後輪21へのトルク配分が無ければ(S10:NO)、そのまま今回の本ルーチンの処理を終了する。一方、後輪21へのトルク伝達が有れば(S10:YES)、電子制御ユニット23はステップS20において、ROMに記憶の上記演算マップを用いてそのときのリアトルクの大きさに応じたシーブ圧の上昇代を算出する。そして電子制御ユニット23は、続くステップS30において、その算出結果に応じてシーブ圧を上昇してベルト挟圧を上昇させた後、今回の本ルーチンの処理を終了する。
【0044】
以上のように本実施の形態では、後輪21へのトルク配分の開始に応じてベルト挟圧の調整がなされ、ベルト式無段変速機12の弦振動の周波数を変更するようにしている。そのため、弦振動伝達範囲の拡張により、そのままでは後輪21へのトルク配分の開始と共に弦振動との共振を起こすような部材が存在していても、共振の発生を回避して篭り音を防止することができる。なおこうした本実施の形態では、電子制御ユニット23が上記挟圧調整手段に相当する構成となっている。
【0045】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、次の効果を奏することができる。
(1)本実施の形態では、電子制御ユニット23は、前後輪のトルク配分に応じてベルト式無段変速機12の各プーリのベルト挟圧を調整するようにしている。前後輪のトルク配分が変化すると、ベルト式無段変速機12のベルト弦部の弦振動の伝達範囲が変わり、それまで未伝達の車両部材にも弦振動が伝達されるようになったり、車両部材に伝達される弦振動の強さが変化したりするようになる。そしてその結果、それまで弦振動とは無関係だった部材にまで弦振動の影響が及ぶようになり、各部材との共振を十分に抑え得る適切な弦振動の周波数が変化するようになる。その点、本実施の形態では、前後輪のトルク配分の変化に応じて各プーリのベルト挟圧が調整されるようになっている。プーリのベルト挟圧を変更すれば、ベルト15の張力が変化して弦振動の周波数fを変化させるようにしている。そのため、前後輪のトルク配分の変化に応じて弦振動との共振を十分に抑制可能な弦振動周波数の範囲が変化しても、それに対応して弦振動の周波数を実際に変化させることが可能となる。したがって本実施の形態によれば、ベルト式無段変速機12のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することができるようになる。
【0046】
(2)本実施の形態では、電子制御ユニット23は、副駆動輪である後輪21へのトルク配分の開始に応じてベルト挟圧の調整を行うようにしている。二輪駆動走行から四輪駆動走行へと切り替えられて、後輪21へのトルク配分が開始されると、ベルト式無段変速機12のベルト弦部の弦振動の伝達範囲が拡張されるようになる。そのため、それまで弦振動とは無関係だった部材にも弦振動が伝達されるようになり、後輪21へのトルク配分の開始と共に弦振動による部材の共振が発生することがある。その点、本実施の形態では、後輪21へのトルク配分の開始に応じてベルト挟圧の調整が行われるため、篭り音の原因となる弦振動による車両部材の共振を好適に抑制することができるようになる。
【0047】
(3)本実施の形態では、電子制御ユニット23は、ベルト挟圧の調整を該ベルト挟圧の上昇により行うようにしている。弦振動の周波数fの変更は、ベルト挟圧の上昇、低下のいずれによっても行うことが可能である。ただし、ベルト挟圧を上昇させれば、ベルト弦部の弦振動の周波数が変化するだけでなく、プーリに対するベルトの滑りが抑えられて弦振動の大きさ自体を小さくすることができる。そのため、ベルト挟圧の調整を、同挟圧の下降によってではなく、該ベルト挟圧の上昇により行うようにすれば、弦振動による車両部材の共振を、ひいては篭り音の発生をより効果的に抑制することができるようになる。
【0048】
(4)本実施の形態では、電子制御ユニット23は、ベルト式無段変速機12の出力トルクから把握される後輪21への伝達トルク(リアトルク)の大きさに基づいて、ベルト挟圧の調整に際してのシーブ圧の上昇代を、ひいてはベルト挟圧の調整量を決定するようにしている。車両各部材への弦振動の伝達状況は、リアトルクの大きさにより変化することから、弦振動との共振を起こし得る部材の範囲も、リアトルクの大きさにより変化する。そのため、車両部材の共振を十分に抑制可能な弦振動周波数の適正値も、リアトルクの大きさにより変化することになる。その点、本実施の形態では、ベルト挟圧の調整量が、リアトルクの大きさにより決定されるようになっており、弦振動による車両部材の共振をより的確に抑制することが可能となる。
【0049】
(第2の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第2の実施の形態を、図3を併せ参照して、上記実施の形態と異なる点を中心に説明する。なお本実施の形態及び以降の各実施の形態において、上述の実施の形態と同等或いはそれし準じた構成については、同じ符号を付してその詳細な説明は省略する。
【0050】
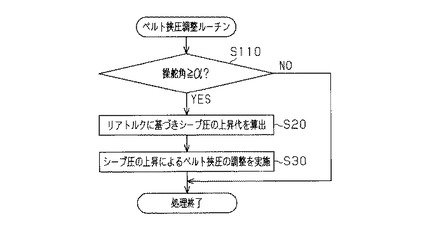
上記のような四輪駆動車では、前輪16のみによる二輪駆動走行時に左右前輪16のいずれかがスリップ(空転)して、左右前輪16の差動量がある程度よりも大きくなったときには、後輪21へのトルク伝達を開始して路面への駆動力の伝達を維持するものがある。一方、左右前輪16の差動量の増大は、車両の操舵角が大きくなることでも発生し、その場合にも後輪21へのトルク分配が開始される。このように、車両の操舵角と前後輪のトルク分配の状態との間には相関があり、トルク分配の状態を操舵角からある程度に把握することが可能である。そこで本実施の形態では、前後輪のトルク分配状態の確認、四輪駆動車の操舵角の検出結果に基づき行うこととし、具体的には、操舵角が予め設定された判定値以上となったときに後輪21へのトルク分配がなされると判断して、ベルト式無段変速機12のベルト挟圧の調整を行うようにしている。
【0051】
図3は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理も、車両走行中に時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。
【0052】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS110において、車両の操舵角が規定の判定値α以上であるか否かを確認する。ここでの判定値αは、左右前輪16の差動量の増大により後輪21へのトルク分配が行われる操舵角範囲の最小値に設定されている。故に操舵角が判定値α以上であれば、後輪21へのエンジントルクの配分がなされることになる。
【0053】
ここで電子制御ユニット23は、操舵角が判定値α未満であれば(S110:NO)、そのまま今回の本ルーチンの処理を終了する。一方、操舵角が判定値α以上であり、後輪21へのトルク配分が行われているのでれば(S110:YES)、電子制御ユニット23はステップS20においてシーブ圧の上昇代を算出し、続くステップS30においてベルト挟圧の上昇を実施する。
【0054】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、上記(1)〜(4)に記載の効果に加え、更に次の効果を奏することができる。
(5)本実施の形態では、電子制御ユニット23は、四輪駆動車の操舵角の検出結果に基づいて後輪21へのエンジントルクの分配の有無を確認するようにしている。操舵角とトルク配分の状態との間には相関があるため、各車輪へのトルク配分の状況を操舵角からある程度に把握することが可能である。よって上記構成のように、四輪駆動車の操舵角の検出結果に基づくことでも、前後輪のトルク配分の状態を確認することができるようになる。そしてその結果に基づきベルト挟圧の調整を行うことで、ベルト式無段変速機12のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することができるようになる。
【0055】
(第3の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第3の実施の形態を、図4を併せ参照して、上記実施の形態と異なる点を中心に説明する。
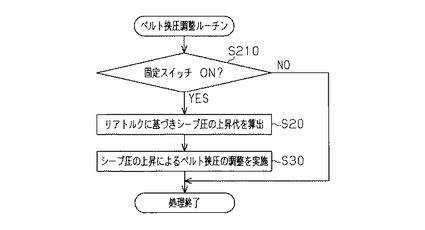
上記のような四輪駆動車では、通常は主駆動輪のみによる二輪駆動走行を行い、必要に応じて四輪駆動走行を実施するようにしている。こうした四輪駆動車として、車室内に設置された固定スイッチの操作により、前後輪のトルク配分を固定して四輪駆動走行を常時行うフルタイム四駆モードを、運転者が任意に選択可能としたものがある。こうした四輪駆動車では、そうした固定スイッチの操作状況に基づいて副駆動輪である後輪21へのエンジントルクの分配の有無を確認することが可能となる。すなわち、固定スイッチが「ON」とされ、フルタイム四駆モードが選択されているときには、後輪21へのエンジントルクの分配がなされると判断することができる。そこで本実施の形態では、後輪21へのトルク分配の有無の確認を、そうした固定スイッチの操作状況に基づき行うこととし、具体的には、固定スイッチが「ON」とされていることをもって後輪21へのトルク分配がなされると判断して、ベルト式無段変速機12のベルト挟圧の調整を行うようにしている。
【0056】
なお、そうした固定スイッチの「OFF」時にも、状況によっては後輪21にもエンジントルクが分配されることがある。ただし、このときの後輪21へのトルク分配は定常的には行われず、その結界として車両部材が共振して篭り音が発生しても一時的なものであるため、ここでは問題とはしないようにしている。
【0057】
図4は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理も、車両走行中に時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。なお、ここでは、上記固定スイッチが「ON」のときにはフルタイム四駆モードが選択され、「OFF」のときにはパートタイム四駆モードが選択されるものとする。
【0058】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS210において、上記固定スイッチが「ON」であるか否かを確認する。ここで電子制御ユニット23は、固定スイッチが「OFF」であれば(S210:NO)、そのまま今回の本ルーチンの処理を終了する。一方、固定スイッチが「ON」であれば(S210:YES)、電子制御ユニット23はステップS20においてシーブ圧の上昇代を算出し、続くステップS30においてベルト挟圧の上昇を実施する。
【0059】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、上記(1)〜(4)に記載の効果に加え、更に次の効果を奏することができる。
(6)本実施の形態では、電子制御ユニット23は、車両の走行モードを四輪駆動走行に固定するための固定スイッチの操作状況に基づいて、後輪21へのトルク分配の有無を確認するようにしている。このように固定スイッチの操作状況に基づくことによっても、前後輪のトルク分配の状態をある程度に把握することが可能である。そして、その監視結果に基づきベルト挟圧の調整を行うことで、ベルト式無段変速機12のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することができるようになる。
【0060】
(第4の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第4の実施の形態を、図5を併せ参照して、上記実施の形態と異なる点を中心に説明する。
ベルト式無段変速機12の変速比γを変更すべくそのプーリ比を変化させると、プーリへのベルト15の巻掛長が変化して、ベルト弦部の弦長Lも変化するようになる。ここで上式(1)に示されるように、ベルト弦部の弦長Lが変化すると、弦振動の周波数fも変化する。そのため、弦振動による車両部材の共振は、ベルト式無段変速機12の変速比次第で発生したり、しなかったりすることがある。すなわち、ある特定の変速比では、後輪21へのトルク配分の開始に応じて車両部材の共振が発生しても、別の変速比では車両部材の共振が発生しないことがある。そこで本実施の形態では、前後輪のトルク配分に応じたベルト挟圧の調整を、ベルト式無段変速機12の変速比γがそのままでは弦振動による車両部材の共振が発生するような特定の範囲にあるときに限り行うようにしている。
【0061】
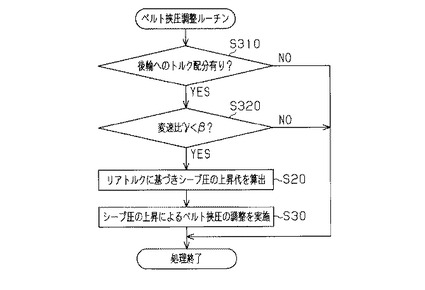
図5は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理も、車両走行中に時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。なお、ここでは、ベルト式無段変速機12の変速比γが規定値β未満の範囲にあるときに限り、弦振動による車両部材の共振の発生が懸念されるものとする。
【0062】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS310において、後輪21へのトルク配分の有無を確認する。ここでの後輪21へのトルク配分の有無の確認は、上述したリアトルクの検出結果に基づく手法、操舵角の検出結果に基づく手法、固定スイッチの操作状況に基づく手法のいずれか、若しくはそれら手法の組合せによって行うことができる。ここで電子制御ユニット23は、後輪21へのトルク配分がなされていなければ(S310:NO)、そのまま今回の本ルーチンの処理を終了する。
【0063】
一方、後輪21へのトルク配分がなされていれば(S310:YES)、電子制御ユニット23はステップS320において、ベルト式無段変速機12の変速比γが上記既定値β未満であるか否かを確認する。ここで電子制御ユニット23は、変速比γが上記既定値β以上であれば(S320:NO)、そのまま今回の本ルーチンの処理を終了する。一方、変速比γが上記既定値β未満であり、そのままベルト挟圧を調整しなければ弦振動による車両部材の共振が発生してしまう虞のある状況にあれば(S320:YES)、電子制御ユニット23はステップS20にてシーブ圧の上昇代を算出し、続くステップS30においてベルト挟圧の上昇を実施する。
【0064】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、上記(1)〜(4)に記載の効果に加え、更に次の効果を奏することができる。
(7)本実施の形態では、電子制御ユニット23は、前後輪のトルク配分に応じたベルト挟圧の調整を、ベルト式無段変速機12の変速比γが規定の範囲にあることを条件に実施するようにしている。そのため、ベルト式無段変速機12の変速比γが、そのままでは弦振動による車両部材の共振が発生するような領域にあるときに限り、ベルト挟圧の調整を実施することが可能となり、本来不要なベルト挟圧調整の実施を回避して、弦振動による車両部材の共振の抑制をより効率的に図ることができるようになる。
【0065】
(第5の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第5の実施の形態を、図6を併せ参照して、上記実施の形態と異なる点を中心に説明する。
ベルト式無段変速機12を搭載する車両では、マニュアルトランスミッション搭載車のような変速操作を可能とするシーケンシャルモードが変速モードとして採用されることがある。こうしたシーケンシャルモードでは、運転者の操作により選択された変速段に対応する変速比にベルト式無段変速機12の変速比γを固定するように、変速制御が行われる。
【0066】
ここで、ベルト弦部で発生する弦振動の周波数は、上述したようにベルト式無段変速機12の変速比γにより変化する。そのため、弦振動による車両部材の共振がシーケンシャルモードでの特定の変速段に限って発生することがある。そこで本実施の形態では、シーケンシャルモード時には、前後輪のトルク配分に応じたベルト挟圧の調整を、そのとき選択中の変速段がそのままでは弦振動による車両部材の共振が発生する虞なある特定の変速段であるときに限り行うようにしている。例えばLOWギアにあるときには、ベルト式無段変速機12のベルト挟圧を調整しなければ、後輪21へのトルク配分に応じて弦振動による車両部材の共振が発生する虞があり、それら以外の変速段ではそうした蓋然性が無いのであれば、LOWギアの選択時に限り、ベルト挟圧の調整を行うこととする。
【0067】
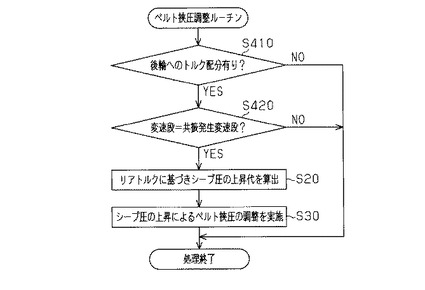
図6は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理は、車両の変速モードがシーケンシャルモードに設定されているときに、時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。
【0068】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS410において、後輪21へのトルク配分の有無を確認する。ここでの後輪21へのトルク配分の有無の確認も、上述したリアトルクの検出結果に基づく手法、操舵角の検出結果に基づく手法、固定スイッチの操作状況に基づく手法のいずれか、若しくはそれら手法の組合せによって行うことができる。ここで電子制御ユニット23は、後輪21へのトルク配分がなされていなければ(S410:NO)、そのまま今回の本ルーチンの処理を終了する。
【0069】
一方、後輪21へのトルク配分がなされていれば(S410:YES)、電子制御ユニット23はステップS420において、現在選択中の変速段が、そのままでは弦振動による車両部材の共振を招くような変速段(共振発生変速段)であるか否かを確認する。ここで電子制御ユニット23は、現在選択中の変速段が共振発生変速段でなければ(S420:NO)、そのまま今回の本ルーチンの処理を終了する。一方、現在選択中の変速段が共振発生変速段であり、そのままベルト挟圧を調整しなければ弦振動による車両部材の共振が発生してしまう状況にあれば(S420:YES)、電子制御ユニット23はステップS20にてシーブ圧の上昇代を算出し、続くステップS30においてベルト挟圧の上昇を実施する。
【0070】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、上記(1)〜(4)に記載の効果に加え、更に次の効果を奏することができる。
(8)本実施の形態では、電子制御ユニット23は、運転者の操作により選択された変速段に対応する変速比にベルト式無段変速機12の変速比γを固定するシーケンシャルモードにあって、予め設定された特定の変速段が選択されていることを条件に、前後輪のトルク配分に応じたベルト挟圧の調整を実施するようにしている。そのため、そのままでは弦振動による車両部材の共振が発生するような特定の変速段にあるときに限り、ベルト挟圧の調整を実施することが可能となり、本来不要なベルト挟圧調整の実施を回避して、弦振動による車両部材の共振の抑制をより効率的に図ることができるようになる。
【0071】
(第6の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第6の実施の形態を、上記実施の形態と異なる点を中心に説明する。
上記各実施の形態では、ベルト挟圧の調整に際してのシーブ圧の上昇代、すなわちベルト挟圧の調整量を、副駆動輪である後輪21に配分されるトルク(リアトルク)の大きさに基づいて決定するようにしていた。ただし車両によっては、リアトルクの大きさのモニタを行っていないことがあり、そうした場合には、リアトルクに直接基づくベルト挟圧の調整量の決定は行えないことになる。もっとも、リアトルクの大きさは、電子制御カップリング20の入力トルクと、ベルト式無段変速機12の変速比γとに基づいてその大凡の値を推定することができる。よってリアトルクの大きさをモニタしない場合にも、上記入力トルク及び変速比γに基づいてベルト挟圧の調整量を決定することで、同様のベルト挟圧調整を行うことができる。なお、電子制御カップリング20の入力トルクは、直接検出する以外にも、エンジン10の発生トルクと変速比γとから演算して求めることが可能である。
【0072】
なお以上説明した各実施の形態は、以下のように変更して実施することもできる。
・第1〜第5の実施の形態では、セカンダリプーリ14のトルクをベルト式無段変速機12の出力トルクとして検出し、その検出値をリアトルクの大きさの指標値として用いて、ベルト挟圧の調整を行うようにしていた。もっとも、ベルト式無段変速機12の出力トルクは、エンジン10から後輪21へのトルク伝達経路におけるセカンダリプーリ14から電子制御カップリング20までの部分に配置された任意の回転要素のトルクから求めることが可能である。そこでセカンダリプーリ14に代えて、それら回転要素のトルクの検出値をベルト式無段変速機12の出力トルクとして検出し、その検出値をリアトルクの大きさの指標値として用いて、ベルト挟圧の調整を行うようにしてを良い。また、上記トルク伝達経路における電子制御カップリング20以降の回転要素(後輪21の車軸等)のトルクを検出すれば、リアトルクを直接検出することができ、リアトルクを直接検出してのベルト挟圧の調整を行うことも可能である。
【0073】
・上記実施の形態では、ベルト式無段変速機12のベルト挟圧の調整を、ベルト挟圧をそれまでよりも上昇させることで行うようにしていた。もっとも、ベルト挟圧を低下させることによっても、弦振動の周波数は変化されるため、ベルト挟圧の低下を通じても弦振動による車両部材の共振を抑制することが可能である。例えばベルト挟圧をそれ以上上昇させる余地が無い場合や、ベルト挟圧の上昇よりもその低下によった方が車両部材の共振を回避可能な弦振動周波数を容易に得られる場合などには、弦振動による車両部材の共振に起因した篭り音の抑制をベルト挟圧の低下を通じて図るようにすると良い。
【0074】
・上記実施の形態では、副駆動輪である後輪21へのトルク配分の開始に応じてベルト式無段変速機12のベルト挟圧の調整を行うようにしていた。もっとも、リアトルクがある程度より大きくなるまで、弦振動による車両部材の共振が発生しないのであれば、リアトルクが一定値以上となったときにベルト挟圧の調整を行うようにしても良い。
【0075】
・第1〜第4の実施の形態では、リアトルクの大きさの検出結果に基づいてベルト挟圧の調整量を決定するようにしていた。なお、リアトルクの大きさは、電子制御カップリング20により調整されるため、直接検出せずとも、電子制御カップリング20の制御指令値より把握することもできる。そのため、電子制御カップリング20の制御指令値に基づいてベルト挟圧の調整量を決定するようにしても、同様のベルト挟圧調整を行うことができる。
【0076】
・上記実施の形態では、検出或いは推定されるリアトルクの大きさに基づいてベルト挟圧の調整量を決定するようにしていた。なお上述したようにベルト式無段変速機12のベルト弦部にて発生する弦振動の周波数は、変速比γによって変化するため、弦振動による車両部材の共振の発生を回避可能な適切なベルト挟圧の調整量は、変速比γによって変化することがある。そこで、そうした場合には、ベルト挟圧の調整量を、変速比γに基づいて、或いは必要であれば変速比γとリアトルクの検出、推定の結果とに基づいて決定することで、より効果的に弦振動による車両部材の共振を抑制することができるようになる。
【0077】
・上記各実施の形態では、リアトルクの大きさ等に基づいてベルト挟圧の調整量を決定するようにしていたが、弦振動による車両部材の共振を十分に抑制し得るベルト挟圧の調整量がリアトルクの変化に依らず殆ど変化しない場合には、調整量を常に一律の固定値をするようにしても良い。
【0078】
・上記各実施の形態では、前輪16を主駆動輪とし、後輪21を副駆動輪とする四輪駆動車に搭載されるベルト式無段変速機12を対象として本発明を実施した例を説明したが、後輪を主駆動輪、前輪を副駆動輪とする四輪駆動車に搭載のベルト式無段変速機にも、本発明に係る制御装置を同様に適用することができる。
【0079】
・上記各実施の形態では、二輪駆動走行と四輪駆動走行とを切り替え可能な四輪駆動車に搭載されるベルト式無段変速機12を対象として本発明を実施した例を説明した。もっとも、四輪駆動走行を常時行う四輪駆動車でも、前後輪のトルク配分を状況に応じて切り替えるものでは、そのトルク配分の変更に応じて、車両各部への上記弦振動の伝達状況が変化する。例えば後輪へのトルク分配率が小さいときには、殆ど弦振動の影響を殆ど受けない部材でも、後輪へのトルク分配率が大きくなると、弦振動の影響が無視し得ないほど大きくなることがある。そのため、四輪駆動走行を常時行う四輪駆動車でも、前後輪のトルク配分を変更するものであれば、同様の問題が生じることがある。したがって、こうした常時四輪駆動の四輪駆動車でも、前後輪のトルク配分を状況に応じて切り替えるものであれば、本発明の適用により、ベルト式無段変速機のベルト弦部の弦振動に起因した篭り音の発生の抑制を可能とすることができる。
【図面の簡単な説明】
【0080】
【図1】本発明の第1実施形態についてその適用対象となる四輪駆動車の駆動系の構成を模式的に示す略図。
【図2】同実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【図3】本発明の第2実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【図4】本発明の第3実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【図5】本発明の第4実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【図6】本発明の第5実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【符号の説明】
【0081】
10…エンジン(動力源)、11…トルクコンバータ、12…ベルト式無段変速機、13…プライマリプーリ、14…セカンダリプーリ、15…ベルト、16…前輪(主駆動輪)、17…フロントディファレンシャル、18…トランスファ、19…プロペラシャフト、20…電子制御カップリング、21…後輪(副駆動輪)、22…リアディファレンシャル、23…電子制御ユニット(挟圧調整手段)。
【技術分野】
【0001】
本発明は、四輪駆動機能を備えた車両に搭載されるベルト式無段変速機の制御装置に関する。
【背景技術】
【0002】
近年、車載用の変速機として、無段階に変速比を変更可能な無段変速機(CVT:Continuously Variable Transmission)の採用が進められている。そして現状では、車載用の無段変速機としては、可変径式の一対のプーリとそれらプーリに架け渡されるベルトとを組合せたベルト式無段変速機が主流となっている。ベルト式無段変速機は、入力側及び出力側の2つのプーリのベルト巻掛半径の比(プーリ比)を変更することで、変速を行うように構成されている。
【0003】
こうしたベルト式無段変速機では、プーリに対してベルトは微小なすべりを起しながらトルクを伝達しており、すべりを伴う運動はμ−V特性を有することから、無段変速機の動作中には、ベルトを加振するエネルギが常に発生している。一方、2つのプーリに架け渡されたベルトには、いずれのプーリとも接触していない弦部が存在するため、無段変速機の動作に伴ってそうしたベルト弦部に弦振動が発生するようになる。
【0004】
従来、こうしたベルト式無段変速機の弦振動に着目した発明として、特許文献1に記載のものが知られている。この特許文献1に記載の発明では、ベルト弦部の弦振動の増大をもってベルト挟圧の不足によるベルト滑りの発生を検知し、その発生の検知時には、プーリのベルト挟圧を増加させてベルト滑りを防止するようにしている。
【特許文献1】特開2001−108082号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、上記のようなベルト弦部の弦振動の周波数が車両部材の固有振動数と適合して共振現象が起きることで、車両の乗員に違和感を与えるような篭り音が発生することがある。こうした篭り音は、以下に述べるように、四輪駆動車において特に顕著となる。
【0006】
四輪駆動車として、前後輪のトルク分配率を状況に応じて可変とするものがある。そして主駆動輪(例えば前輪)のみにトルクを配分して走行を行う二輪駆動走行と主駆動輪及び副駆動輪(例えば後輪)の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものがある。こうした四輪駆動車では、副駆動輪は、四輪駆動走行時に変速機と駆動連結され、二輪駆動走行時にはその駆動連結が解除される。そのため、二輪駆動走行から四輪駆動走行への切り替えに際しては、ベルト式無段変速機のベルト弦部の弦振動の伝達範囲が拡張されるようになり、二輪駆動走行時には殆んど弦振動が伝達されていなかった部材にも四輪駆動走行時には弦振動が伝達されるようになる。したがって二輪駆動走行時には、ベルト弦部の弦振動と共振を起こす部材が存在していなくても、四輪駆動走行時には弦振動の伝達範囲の拡張に応じて共振現象が発生してしまうことがある。
【0007】
こうした共振現象の発生を回避するには、弦振動の伝達範囲に設置された部材の固有振動数が弦振動の周波数と適合しないように各部材を設計する必要がある。しかしながら、弦振動の伝達範囲に存在するすべての部材についてそうした設計を行うことは困難であり、ましてや四輪駆動走行時の拡張された弦振動の伝達範囲に存在する部材のすべてにそうした設計を適用することは尚更困難となる。
【0008】
なお、二輪駆動走行と四輪駆動走行とを切り替え可能な四輪駆動車の多くは、二輪駆動車をベースとして開発されている。ここでベースとなった二輪駆動車では、ベルト式無段変速機のベルト弦部の弦振動との共振現象が発生しないように設計がなされていたとしても、四輪駆動としたときには弦振動との共振現象の発生する部材が存在してしまうことがある。こうした場合、共振を起こす部材を皆無とするには、四輪駆動機能の追加に際してベース車両からの大幅な設計変更が必要となってしまう。そのため、四輪駆動走行時における篭り音の発生については、その防止をある程度のところで妥協せざるを得ないのが実情となっている。
【0009】
ちなみに、四輪駆動走行を常時行う四輪駆動車でも、前後輪のトルク配分を状況に応じて切り替えるものでは、そのトルク配分の変更に応じて、車両各部への上記弦振動の伝達状況が変化する。例えば後輪へのトルク分配率が小さいときには、殆ど弦振動の影響を殆ど受けない部材でも、後輪へのトルク分配率が大きくなると、弦振動の影響が無視し得ないほど大きくなることがある。そのため、四輪駆動走行を常時行う四輪駆動車でも、前後輪のトルク配分を変更するものであれば、同様の問題が生じることがある。
【0010】
本発明は、こうした現状に鑑みてなされたものであって、その解決しようとする課題は、ベルト式無段変速機のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することのできるベルト式無段変速機の制御装置を提供することにある。
【課題を解決するための手段】
【0011】
以下、上記課題を解決するための手段、及びその作用効果を記載する。
上記課題を解決するため、請求項1に記載の発明は、前後輪のトルク配分を可変とする四輪駆動車に搭載されて、入力側及び出力側の2つのプーリに架け渡されたベルトの前記2つのプーリに対する巻掛半径を変更することで変速を行うベルト式無段変速機の制御を行う装置であって、前記前後輪のトルク配分に応じて、前記プーリのベルト挟圧を調整する挟圧調整手段を備えることをその要旨としている。
【0012】
前後輪のトルク配分が変化すると、ベルト式無段変速機のベルト弦部の弦振動の伝達範囲が変わり、それまで未伝達の車両部材にも弦振動が伝達されるようになったり、車両部材に伝達される弦振動の強さが変化したりするようになる。そしてその結果、それまで弦振動とは無関係だった部材にまで弦振動の影響が及ぶようになり、各部材との共振を十分に抑え得る適切な弦振動の周波数が変化するようになる。
【0013】
その点、上記構成では、前後輪のトルク配分の変化に応じてプーリのベルト挟圧が調整されるようになっている。プーリのベルト挟圧を変更すれば、ベルトの張力が変化して弦振動の周波数を変化させることができる。よって上記構成では、前後輪のトルク配分の変化に応じて弦振動との共振を十分に抑制可能な弦振動周波数の範囲が変化しても、それに対応して弦振動の周波数を実際に変化させることが可能となる。したがって上記構成によれば、ベルト式無段変速機のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することができるようになる。
【0014】
請求項2に記載の発明は、請求項1に記載のベルト式無段変速機の制御装置において、当該四輪駆動車は、主駆動輪のみにトルクを配分して走行を行う二輪駆動走行と前記主駆動輪及び副駆動輪の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものであって、前記挟圧調整手段は、前記副駆動輪へのトルク配分の開始に応じて前記ベルト挟圧の調整を行うことをその要旨としている。
【0015】
上記のような四輪駆動車での二輪駆動走行から四輪駆動走行への切り替え、すなわち副駆動輪へのトルク配分の開始に際しては、ベルト式無段変速機のベルト弦部で発生する弦振動の伝達範囲が大幅に拡大される。そしてその結果、弦振動の影響を受ける車両部材の範囲が大きく変化する。そのため、副駆動輪へのトルク配分の開始に際しては、それまで弦振動とは無関係だった車両部材にも弦振動が伝達されるようになり、副駆動輪へのトルク伝達の開始と共に弦振動による車両部材の共振が発生することがある。その点、上記構成では、副駆動輪へのトルク配分の開始に応じてベルト挟圧の調整が行われるため、篭り音の原因となる弦振動による車両部材の共振を好適に抑制することができるようになる。
【0016】
請求項3に記載の発明は、請求項2に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、前記副駆動輪に伝達される前記トルクの大きさに基づいて前記ベルト挟圧の調整量を決定することをその要旨としている。
【0017】
各車両部材への弦振動の伝達状況は、副駆動輪に配分されるトルクの大きさにより変化することから、弦振動との共振を起こし得る部材の範囲も、副駆動輪に配分されるトルクの大きさにより変化する。そのため、車両部材の共振を十分に抑制可能な弦振動周波数の適正値も、副駆動輪への伝達トルクの大きさにより変化することがある。その点、上記構成では、ベルト挟圧の調整量が、副駆動輪に配分されるトルクの大きさにより決定されるため、弦振動による車両部材の共振をより的確に抑制することが可能となる。
【0018】
請求項4に記載の発明は、請求項2に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、前記副駆動輪へのトルク分配率を可変とする電子制御カップリングの入力トルクと、前記ベルト式無段変速機の変速比とに基づいて前記ベルト挟圧の調整量を決定することをその要旨とする。
【0019】
上記のように副駆動輪に配分されるトルクの大きさによりベルト挟圧の調整量を決定することで、弦振動による車両部材の共振をより的確に抑制することが可能となる。このときの副駆動輪に配分されるトルクの大きさは、直接検出せずとも、電子制御カップリングの入力トルクとベルト式無段変速機の変速比とから概ね推定することができる。よって上記構成のように、それら入力トルクと変速比とベルト挟圧の調整量を決定する場合にも、弦振動による車両部材の共振をより的確に抑制することが可能となる。
【0020】
請求項5に記載の発明は、請求項1〜4のいずれか1項に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、前記ベルト挟圧の調整を該ベルト挟圧の上昇により行うことをその要旨としている。
【0021】
ベルト挟圧を上昇させれば、ベルト弦部の弦振動の周波数が変化するだけでなく、プーリに対するベルトの滑りが抑えられて弦振動の大きさ自体を小さくすることができる。そのため、上記構成のように、ベルト挟圧の調整を該ベルト挟圧の上昇により行うようにすれば、弦振動による車両部材の共振を、ひいては篭り音の発生をより効果的に抑制することができるようになる。
【0022】
請求項6に記載の発明は、請求項1〜5のいずれか1項に記載のベルト式無段変速機の制御装置において、当該四輪駆動車の操舵角の検出結果に基づいて前記前後輪のトルク配分の状態を確認することをその要旨としている。
【0023】
四輪駆動車では、4つの車輪のいずれかに空転(タイヤスリップ)が発生して、左右車輪の差動がある程度を超えて大きくなると、各車輪へのトルク配分を変更して、路面への駆動力伝達の維持を図るものがある。一方、左右車輪の差動量の増大は、操舵角がある程度よりも大きくなったときにも発生し、このときにも各車輪のトルク配分が変更される。このように、操舵角とトルク配分の状態との間には相関があり、各車輪へのトルク配分の状況を操舵角からある程度に把握することが可能である。よって上記構成のように、車両の操舵角の検出結果に基づくことでも、前後輪のトルク配分の状態を確認することができるようになる。
【0024】
請求項7に記載の発明は、請求項1〜6のいずれか1項に記載のベルト式無段変速機の制御装置において、当該四輪駆動車は、主駆動輪のみにトルクを配分して走行を行う二輪駆動走行と前記主駆動輪及び副駆動輪の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものであって、前記挟圧調整手段は、当該四輪駆動車の走行モードを前記四輪駆動走行に固定するための固定スイッチの操作状況に基づいて前記前後輪のトルク配分の状態を確認することをその要旨としている。
【0025】
四輪駆動車では、運転者の固定スイッチの操作に応じて車両の走行モードを四輪駆動走行に固定するようにしたものがある。こうした四輪駆動車では、そうした固定スイッチの操作状況に基づいて、前後輪のトルク配分の状態をある程度に確認することが可能となる。
【0026】
請求項8に記載の発明は、請求項1〜7のいずれか1項に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、前記ベルト式無段変速機の変速比が規定の範囲にあることを条件に、前記トルクの伝達状況に応じた前記ベルト挟圧の調整を実施することをその要旨としている。
【0027】
ベルト式無段変速機の変速比を変更すべくそのプーリ比を変化させると、ベルト弦部の弦長が変わり、弦振動の周波数が変化する。そのため、弦振動による車両部材の共振は、ベルト式無段変速機の変速比次第で発生したり、しなかったりする。ここで上記構成では、前後輪のトルク配分に応じたベルト挟圧の調整が、ベルト式無段変速機の変速比が規定の範囲にあることを条件に実施されるようになっている。そのため、ベルト式無段変速機の変速比が、そのままでは弦振動による車両部材の共振が発生するような領域にあるときに限り、ベルト挟圧の調整を実施することが可能となり、本来不要なベルト挟圧調整の実施を回避して、弦振動による車両部材の共振の抑制をより効率的に図ることができるようになる。
【0028】
請求項9に記載の発明は、請求項1〜8のいずれか1項に記載のベルト式無段変速機の制御装置において、前記挟圧調整手段は、運転者の操作により選択された変速段に対応する変速比に前記ベルト式無段変速機の変速比を固定するシーケンシャルモードにあって、予め設定された特定の変速段が選択されていることを条件に、前記トルクの伝達状況に応じた前記ベルト挟圧の調整を実施することをその要旨としている。
【0029】
車両の変速モードとしてシーケンシャルモードが採用されている場合、シーケンシャルモード時には、運転者の操作により選択された変速段に対応する変速比となるようにベルト式無段変速機の変速比が設定される。こうした場合、上記のように弦振動の周波数はベルト式無段変速機の変速比によって変化するため、弦振動による車両部材の共振がシーケンシャルモードでの特定の変速段に限って発生することがある。ここで上記構成では、前後輪のトルク配分に応じたベルト挟圧の調整が、シーケンシャルモードにおいて予め設定された特定の変速段が選択されていることを条件に実施されるようになっている。そのため、そのままでは弦振動による車両部材の共振が発生するような変速段にあるときに限り、ベルト挟圧の調整を実施することが可能となり、本来不要なベルト挟圧調整の実施を回避して、弦振動による車両部材の共振の抑制をより効率的に図ることができるようになる。
【発明を実施するための最良の形態】
【0030】
(第1の実施の形態)
以下、本発明のベルト式無段変速機の制御装置を具体化した第1の実施の形態を、図1及び図2を参照して詳細に説明する。なお本実施の形態では、前輪を常時トルクの伝達される主駆動輪とし、後輪を必要時にのみトルクの伝達される副駆動輪とするパートタイム四輪駆動車に搭載のベルト式無段変速機を、本発明に係る制御装置の適用対象としたものとなっている。
【0031】
図1は、本実施の形態に係るベルト式無段変速機の制御装置の適用される四輪駆動車の駆動系の構成を示している。同図に示すように、当該四輪駆動車の駆動源であるエンジン10は、トルクコンバータ11を介してベルト式無段変速機12に接続されている。ベルト式無段変速機12は、可変径式の一対のプーリ、すなわち入力側のプライマリプーリ13及び出力側のセカンダリプーリ14と、それらに巻き掛けられるベルト15とを備え、両プーリのベルト巻掛半径の比(プーリ比)を変化させることで変速を行うように構成されている。こうしたベルト式無段変速機12での各プーリのベルト巻掛半径は、それらプーリに印加される油圧(シーブ圧)の調整により行われるようになっている。
【0032】
こうしたベルト式無段変速機12の出力側は、左右前輪16の差動を許容するフロントディファレンシャル17に連結され、そのフロントディファレンシャル17は変向機であるトランスファ18を介してプロペラシャフト19に連結されている。そしてプロペラシャフト19は、前輪16及び後輪21のトルク配分を変更する電子制御カップリング20を介して、左右後輪21の差動を許容するリアディファレンシャル22に接続されている。
【0033】
またこうした四輪駆動車には、ベルト式無段変速機12の制御を行う電子制御ユニット23が設置されている。電子制御ユニット23は、ベルト式無段変速機12の制御に係る各種演算処理を行う中央演算装置(CPU)、制御用のプログラムやデータの記憶された読出専用メモリ(ROM)、CPUの演算結果を一時記憶するランダムアクセスメモリ(RAM)、外部との信号の送受のための入出力ポート(I/O)を備えて構成されている。こうした電子制御ユニット23の入力ポートには、車両の各部に設置されたセンサによる、車速、アクセル操作量、電子制御カップリング20を介して後輪21側に伝達されるトルク(リアトルク)、電子制御カップリング20への入力トルク、車両の操舵角などの検出信号が入力されている。そして電子制御ユニット23は車両走行中、現在の走行状態において最適な変速比を車速とアクセル操作量とに基づき算出し、その算出した変速比が得られるようにベルト式無段変速機12の各プーリに印加されるシーブ圧を調整している。
【0034】
さて、こうした四輪駆動車に搭載のベルト式無段変速機12では、車両走行中に、両プーリに架け渡されたベルト15の弦部(いずれのプーリとも接触していない部分)が、ベルト−プーリ間の微小すべりにより加振されて振動する。このベルト弦部の振動(弦振動)は、エンジン10から各駆動輪へのトルク伝達経路等を通じて車両各部に伝達される。
【0035】
こうした弦振動の周波数fは、下式(1)にて求められる。下式(1)において「n」は任意の整数を、「L」は弦長(ベルト弦部の長さ)を、「T」はベルト15の張力を、「ρ」はベルト15の線密度をそれぞれ示している。なお、弦長Lはベルト式無段変速機12のプーリ比の変更、すなわち変速比の変更に応じて、ベルト15の張力Tは各プーリのベルト挟圧に応じて、それぞれ変化するものとなっている。
【数1】
【0036】
一方、弦振動の伝達された車両部材の固有振動数がその弦振動の周波数と適合すると、すなわち固有振動数が弦振動の周波数の「m/n」倍(m,n:任意の整数)と一致すると、その車両部材が共振現象を起こして、篭り音が発生する。ここで上記のような四輪駆動車では、電子制御カップリング20による前後輪のトルク配分の変更により、後輪21側へのエンジントルクの伝達状況が変化し、その結果、上記弦振動の伝達状況が変化して、弦振動の影響を受ける部材の範囲が変化する。例えば後輪21へのトルク伝達がなされていないときには、弦振動がほとんど伝達されていなかった部材でも、後輪21へのトルク伝達の開始と共に弦振動の影響が無視し得なくなることがある。そのため、弦振動の周波数fや大きさに変りがなくとも、前後輪のトルク配分が変化すれば、弦振動による車両部材の共振の発生状況に変化が生じることがある。
【0037】
そこで本実施の形態では、後輪21へのトルク配分の有無を監視し、その監視結果に応じてベルト式無段変速機12の各プーリのベルト挟圧を調整して弦振動の周波数fを変更することで、弦振動による車両部材の共振の発生を抑制するようにしている。このときのベルト挟圧の調整は、ベルト式無段変速機12の各プーリに印加されるシーブ圧を上昇させることで行われ、両プーリのシーブ圧を同時に上昇させて、プーリ比(変速比)を一定に維持したまま、ベルト挟圧が上昇するように行われる。
【0038】
なお本実施の形態の適用される四輪駆動車では、前輪16のみによる二輪駆動走行時には、弦振動との共振を起こす部材は存在しないようになっている。そして前輪16及び後輪21による四輪駆動走行が開始されると、それに伴う弦振動伝達範囲の拡張に応じて、弦振動との共振を起こし得る部材が存在するようになっている。そのため、本実施の形態では、後輪21へのトルク伝達の開始に応じて、そうしたベルト挟圧の調整を行うようにしている。
【0039】
ちなみに、このときのベルト挟圧の調整は、ベルト挟圧の調整可能範囲において、弦振動の周波数fが、そのときの後輪21へのトルクの伝達状況において弦振動の影響を受けるすべての車両部材の共振周波数(固有周波数及びその「n/m」倍の周波数)から外れるように行われる。ここでのベルト挟圧の調整可能範囲とはすなわち、ベルト15の滑りを防止可能なベルト挟圧の最小値とシーブ圧を設定可能な最大値としたときのベルト挟圧との間の範囲である。なお、弦振動の影響を受ける車両部材の範囲は、後輪21に伝達されるトルク(リアトルク)の大きさにより変化するため、車両部材の共振を回避可能な弦振動の周波数fの最適値は、リアトルクの大きさによって変化することになる。そこでここでは予め実験等で、共振の回避が可能な最適値に弦振動の周波数fを変化させることのできるシーブ圧の上昇代を、リアトルクの大きさ毎に求めておき、そうしたシーブ圧の上昇代とリアトルクとの関係を演算マップとして電子制御ユニット23のROMに記憶しておくようにしている。そして電子制御ユニット23は、上記ベルト挟圧の調整に際して、その演算マップを用いてそのときのリアトルクの大きさに応じた最適なシーブ圧の上昇代を求め、その求めた上昇代に応じてシーブ圧を調整するようにしている。
【0040】
また本実施の形態の適用される四輪駆動車では、タイヤスリップ時等を除いた通常の四輪駆動走行時には、前後輪のトルク配分が一定となっており、ベルト式無段変速機12の出力トルクと上記リアトルクとの間に線形関係が成り立っている。そこで本実施の形態では、上記リアトルクの大きさの指標値として、ベルト式無段変速機12の出力トルク(例えばセカンダリプーリ14のトルク)の検出値を用いて、上記シーブ圧の調整を行うようにしている。すなわち、実際には上記演算マップは、ベルト式無段変速機12の出力トルクとその出力トルクでの最適なシーブ圧の上昇代との関係が記憶されたものとなっている。
【0041】
図2は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理は、車両走行中に時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。
【0042】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS10において、リアトルクの検出結果から後輪21へのトルク配分の有無を、すなわち後輪21のトルク配分率が「0」か、そうでないかを確認する。具体的には、ここでの後輪21へのトルク配分の有無の確認は、リアトルクが「0」であるか否かにより行われる。
【0043】
ここで電子制御ユニット23は、後輪21へのトルク配分が無ければ(S10:NO)、そのまま今回の本ルーチンの処理を終了する。一方、後輪21へのトルク伝達が有れば(S10:YES)、電子制御ユニット23はステップS20において、ROMに記憶の上記演算マップを用いてそのときのリアトルクの大きさに応じたシーブ圧の上昇代を算出する。そして電子制御ユニット23は、続くステップS30において、その算出結果に応じてシーブ圧を上昇してベルト挟圧を上昇させた後、今回の本ルーチンの処理を終了する。
【0044】
以上のように本実施の形態では、後輪21へのトルク配分の開始に応じてベルト挟圧の調整がなされ、ベルト式無段変速機12の弦振動の周波数を変更するようにしている。そのため、弦振動伝達範囲の拡張により、そのままでは後輪21へのトルク配分の開始と共に弦振動との共振を起こすような部材が存在していても、共振の発生を回避して篭り音を防止することができる。なおこうした本実施の形態では、電子制御ユニット23が上記挟圧調整手段に相当する構成となっている。
【0045】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、次の効果を奏することができる。
(1)本実施の形態では、電子制御ユニット23は、前後輪のトルク配分に応じてベルト式無段変速機12の各プーリのベルト挟圧を調整するようにしている。前後輪のトルク配分が変化すると、ベルト式無段変速機12のベルト弦部の弦振動の伝達範囲が変わり、それまで未伝達の車両部材にも弦振動が伝達されるようになったり、車両部材に伝達される弦振動の強さが変化したりするようになる。そしてその結果、それまで弦振動とは無関係だった部材にまで弦振動の影響が及ぶようになり、各部材との共振を十分に抑え得る適切な弦振動の周波数が変化するようになる。その点、本実施の形態では、前後輪のトルク配分の変化に応じて各プーリのベルト挟圧が調整されるようになっている。プーリのベルト挟圧を変更すれば、ベルト15の張力が変化して弦振動の周波数fを変化させるようにしている。そのため、前後輪のトルク配分の変化に応じて弦振動との共振を十分に抑制可能な弦振動周波数の範囲が変化しても、それに対応して弦振動の周波数を実際に変化させることが可能となる。したがって本実施の形態によれば、ベルト式無段変速機12のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することができるようになる。
【0046】
(2)本実施の形態では、電子制御ユニット23は、副駆動輪である後輪21へのトルク配分の開始に応じてベルト挟圧の調整を行うようにしている。二輪駆動走行から四輪駆動走行へと切り替えられて、後輪21へのトルク配分が開始されると、ベルト式無段変速機12のベルト弦部の弦振動の伝達範囲が拡張されるようになる。そのため、それまで弦振動とは無関係だった部材にも弦振動が伝達されるようになり、後輪21へのトルク配分の開始と共に弦振動による部材の共振が発生することがある。その点、本実施の形態では、後輪21へのトルク配分の開始に応じてベルト挟圧の調整が行われるため、篭り音の原因となる弦振動による車両部材の共振を好適に抑制することができるようになる。
【0047】
(3)本実施の形態では、電子制御ユニット23は、ベルト挟圧の調整を該ベルト挟圧の上昇により行うようにしている。弦振動の周波数fの変更は、ベルト挟圧の上昇、低下のいずれによっても行うことが可能である。ただし、ベルト挟圧を上昇させれば、ベルト弦部の弦振動の周波数が変化するだけでなく、プーリに対するベルトの滑りが抑えられて弦振動の大きさ自体を小さくすることができる。そのため、ベルト挟圧の調整を、同挟圧の下降によってではなく、該ベルト挟圧の上昇により行うようにすれば、弦振動による車両部材の共振を、ひいては篭り音の発生をより効果的に抑制することができるようになる。
【0048】
(4)本実施の形態では、電子制御ユニット23は、ベルト式無段変速機12の出力トルクから把握される後輪21への伝達トルク(リアトルク)の大きさに基づいて、ベルト挟圧の調整に際してのシーブ圧の上昇代を、ひいてはベルト挟圧の調整量を決定するようにしている。車両各部材への弦振動の伝達状況は、リアトルクの大きさにより変化することから、弦振動との共振を起こし得る部材の範囲も、リアトルクの大きさにより変化する。そのため、車両部材の共振を十分に抑制可能な弦振動周波数の適正値も、リアトルクの大きさにより変化することになる。その点、本実施の形態では、ベルト挟圧の調整量が、リアトルクの大きさにより決定されるようになっており、弦振動による車両部材の共振をより的確に抑制することが可能となる。
【0049】
(第2の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第2の実施の形態を、図3を併せ参照して、上記実施の形態と異なる点を中心に説明する。なお本実施の形態及び以降の各実施の形態において、上述の実施の形態と同等或いはそれし準じた構成については、同じ符号を付してその詳細な説明は省略する。
【0050】
上記のような四輪駆動車では、前輪16のみによる二輪駆動走行時に左右前輪16のいずれかがスリップ(空転)して、左右前輪16の差動量がある程度よりも大きくなったときには、後輪21へのトルク伝達を開始して路面への駆動力の伝達を維持するものがある。一方、左右前輪16の差動量の増大は、車両の操舵角が大きくなることでも発生し、その場合にも後輪21へのトルク分配が開始される。このように、車両の操舵角と前後輪のトルク分配の状態との間には相関があり、トルク分配の状態を操舵角からある程度に把握することが可能である。そこで本実施の形態では、前後輪のトルク分配状態の確認、四輪駆動車の操舵角の検出結果に基づき行うこととし、具体的には、操舵角が予め設定された判定値以上となったときに後輪21へのトルク分配がなされると判断して、ベルト式無段変速機12のベルト挟圧の調整を行うようにしている。
【0051】
図3は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理も、車両走行中に時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。
【0052】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS110において、車両の操舵角が規定の判定値α以上であるか否かを確認する。ここでの判定値αは、左右前輪16の差動量の増大により後輪21へのトルク分配が行われる操舵角範囲の最小値に設定されている。故に操舵角が判定値α以上であれば、後輪21へのエンジントルクの配分がなされることになる。
【0053】
ここで電子制御ユニット23は、操舵角が判定値α未満であれば(S110:NO)、そのまま今回の本ルーチンの処理を終了する。一方、操舵角が判定値α以上であり、後輪21へのトルク配分が行われているのでれば(S110:YES)、電子制御ユニット23はステップS20においてシーブ圧の上昇代を算出し、続くステップS30においてベルト挟圧の上昇を実施する。
【0054】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、上記(1)〜(4)に記載の効果に加え、更に次の効果を奏することができる。
(5)本実施の形態では、電子制御ユニット23は、四輪駆動車の操舵角の検出結果に基づいて後輪21へのエンジントルクの分配の有無を確認するようにしている。操舵角とトルク配分の状態との間には相関があるため、各車輪へのトルク配分の状況を操舵角からある程度に把握することが可能である。よって上記構成のように、四輪駆動車の操舵角の検出結果に基づくことでも、前後輪のトルク配分の状態を確認することができるようになる。そしてその結果に基づきベルト挟圧の調整を行うことで、ベルト式無段変速機12のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することができるようになる。
【0055】
(第3の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第3の実施の形態を、図4を併せ参照して、上記実施の形態と異なる点を中心に説明する。
上記のような四輪駆動車では、通常は主駆動輪のみによる二輪駆動走行を行い、必要に応じて四輪駆動走行を実施するようにしている。こうした四輪駆動車として、車室内に設置された固定スイッチの操作により、前後輪のトルク配分を固定して四輪駆動走行を常時行うフルタイム四駆モードを、運転者が任意に選択可能としたものがある。こうした四輪駆動車では、そうした固定スイッチの操作状況に基づいて副駆動輪である後輪21へのエンジントルクの分配の有無を確認することが可能となる。すなわち、固定スイッチが「ON」とされ、フルタイム四駆モードが選択されているときには、後輪21へのエンジントルクの分配がなされると判断することができる。そこで本実施の形態では、後輪21へのトルク分配の有無の確認を、そうした固定スイッチの操作状況に基づき行うこととし、具体的には、固定スイッチが「ON」とされていることをもって後輪21へのトルク分配がなされると判断して、ベルト式無段変速機12のベルト挟圧の調整を行うようにしている。
【0056】
なお、そうした固定スイッチの「OFF」時にも、状況によっては後輪21にもエンジントルクが分配されることがある。ただし、このときの後輪21へのトルク分配は定常的には行われず、その結界として車両部材が共振して篭り音が発生しても一時的なものであるため、ここでは問題とはしないようにしている。
【0057】
図4は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理も、車両走行中に時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。なお、ここでは、上記固定スイッチが「ON」のときにはフルタイム四駆モードが選択され、「OFF」のときにはパートタイム四駆モードが選択されるものとする。
【0058】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS210において、上記固定スイッチが「ON」であるか否かを確認する。ここで電子制御ユニット23は、固定スイッチが「OFF」であれば(S210:NO)、そのまま今回の本ルーチンの処理を終了する。一方、固定スイッチが「ON」であれば(S210:YES)、電子制御ユニット23はステップS20においてシーブ圧の上昇代を算出し、続くステップS30においてベルト挟圧の上昇を実施する。
【0059】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、上記(1)〜(4)に記載の効果に加え、更に次の効果を奏することができる。
(6)本実施の形態では、電子制御ユニット23は、車両の走行モードを四輪駆動走行に固定するための固定スイッチの操作状況に基づいて、後輪21へのトルク分配の有無を確認するようにしている。このように固定スイッチの操作状況に基づくことによっても、前後輪のトルク分配の状態をある程度に把握することが可能である。そして、その監視結果に基づきベルト挟圧の調整を行うことで、ベルト式無段変速機12のベルト弦部の弦振動との共振に起因した篭り音の発生を効果的に抑制することができるようになる。
【0060】
(第4の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第4の実施の形態を、図5を併せ参照して、上記実施の形態と異なる点を中心に説明する。
ベルト式無段変速機12の変速比γを変更すべくそのプーリ比を変化させると、プーリへのベルト15の巻掛長が変化して、ベルト弦部の弦長Lも変化するようになる。ここで上式(1)に示されるように、ベルト弦部の弦長Lが変化すると、弦振動の周波数fも変化する。そのため、弦振動による車両部材の共振は、ベルト式無段変速機12の変速比次第で発生したり、しなかったりすることがある。すなわち、ある特定の変速比では、後輪21へのトルク配分の開始に応じて車両部材の共振が発生しても、別の変速比では車両部材の共振が発生しないことがある。そこで本実施の形態では、前後輪のトルク配分に応じたベルト挟圧の調整を、ベルト式無段変速機12の変速比γがそのままでは弦振動による車両部材の共振が発生するような特定の範囲にあるときに限り行うようにしている。
【0061】
図5は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理も、車両走行中に時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。なお、ここでは、ベルト式無段変速機12の変速比γが規定値β未満の範囲にあるときに限り、弦振動による車両部材の共振の発生が懸念されるものとする。
【0062】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS310において、後輪21へのトルク配分の有無を確認する。ここでの後輪21へのトルク配分の有無の確認は、上述したリアトルクの検出結果に基づく手法、操舵角の検出結果に基づく手法、固定スイッチの操作状況に基づく手法のいずれか、若しくはそれら手法の組合せによって行うことができる。ここで電子制御ユニット23は、後輪21へのトルク配分がなされていなければ(S310:NO)、そのまま今回の本ルーチンの処理を終了する。
【0063】
一方、後輪21へのトルク配分がなされていれば(S310:YES)、電子制御ユニット23はステップS320において、ベルト式無段変速機12の変速比γが上記既定値β未満であるか否かを確認する。ここで電子制御ユニット23は、変速比γが上記既定値β以上であれば(S320:NO)、そのまま今回の本ルーチンの処理を終了する。一方、変速比γが上記既定値β未満であり、そのままベルト挟圧を調整しなければ弦振動による車両部材の共振が発生してしまう虞のある状況にあれば(S320:YES)、電子制御ユニット23はステップS20にてシーブ圧の上昇代を算出し、続くステップS30においてベルト挟圧の上昇を実施する。
【0064】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、上記(1)〜(4)に記載の効果に加え、更に次の効果を奏することができる。
(7)本実施の形態では、電子制御ユニット23は、前後輪のトルク配分に応じたベルト挟圧の調整を、ベルト式無段変速機12の変速比γが規定の範囲にあることを条件に実施するようにしている。そのため、ベルト式無段変速機12の変速比γが、そのままでは弦振動による車両部材の共振が発生するような領域にあるときに限り、ベルト挟圧の調整を実施することが可能となり、本来不要なベルト挟圧調整の実施を回避して、弦振動による車両部材の共振の抑制をより効率的に図ることができるようになる。
【0065】
(第5の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第5の実施の形態を、図6を併せ参照して、上記実施の形態と異なる点を中心に説明する。
ベルト式無段変速機12を搭載する車両では、マニュアルトランスミッション搭載車のような変速操作を可能とするシーケンシャルモードが変速モードとして採用されることがある。こうしたシーケンシャルモードでは、運転者の操作により選択された変速段に対応する変速比にベルト式無段変速機12の変速比γを固定するように、変速制御が行われる。
【0066】
ここで、ベルト弦部で発生する弦振動の周波数は、上述したようにベルト式無段変速機12の変速比γにより変化する。そのため、弦振動による車両部材の共振がシーケンシャルモードでの特定の変速段に限って発生することがある。そこで本実施の形態では、シーケンシャルモード時には、前後輪のトルク配分に応じたベルト挟圧の調整を、そのとき選択中の変速段がそのままでは弦振動による車両部材の共振が発生する虞なある特定の変速段であるときに限り行うようにしている。例えばLOWギアにあるときには、ベルト式無段変速機12のベルト挟圧を調整しなければ、後輪21へのトルク配分に応じて弦振動による車両部材の共振が発生する虞があり、それら以外の変速段ではそうした蓋然性が無いのであれば、LOWギアの選択時に限り、ベルト挟圧の調整を行うこととする。
【0067】
図6は、こうした本実施の形態に採用される「ベルト挟圧調整ルーチン」のフローチャートを示している。本ルーチンの処理は、車両の変速モードがシーケンシャルモードに設定されているときに、時間割り込み処理として、電子制御ユニット23により周期的に実行されるものとなっている。
【0068】
さて本ルーチンが開始されると、電子制御ユニット23はまずステップS410において、後輪21へのトルク配分の有無を確認する。ここでの後輪21へのトルク配分の有無の確認も、上述したリアトルクの検出結果に基づく手法、操舵角の検出結果に基づく手法、固定スイッチの操作状況に基づく手法のいずれか、若しくはそれら手法の組合せによって行うことができる。ここで電子制御ユニット23は、後輪21へのトルク配分がなされていなければ(S410:NO)、そのまま今回の本ルーチンの処理を終了する。
【0069】
一方、後輪21へのトルク配分がなされていれば(S410:YES)、電子制御ユニット23はステップS420において、現在選択中の変速段が、そのままでは弦振動による車両部材の共振を招くような変速段(共振発生変速段)であるか否かを確認する。ここで電子制御ユニット23は、現在選択中の変速段が共振発生変速段でなければ(S420:NO)、そのまま今回の本ルーチンの処理を終了する。一方、現在選択中の変速段が共振発生変速段であり、そのままベルト挟圧を調整しなければ弦振動による車両部材の共振が発生してしまう状況にあれば(S420:YES)、電子制御ユニット23はステップS20にてシーブ圧の上昇代を算出し、続くステップS30においてベルト挟圧の上昇を実施する。
【0070】
以上説明した本実施の形態のベルト式無段変速機の制御装置によれば、上記(1)〜(4)に記載の効果に加え、更に次の効果を奏することができる。
(8)本実施の形態では、電子制御ユニット23は、運転者の操作により選択された変速段に対応する変速比にベルト式無段変速機12の変速比γを固定するシーケンシャルモードにあって、予め設定された特定の変速段が選択されていることを条件に、前後輪のトルク配分に応じたベルト挟圧の調整を実施するようにしている。そのため、そのままでは弦振動による車両部材の共振が発生するような特定の変速段にあるときに限り、ベルト挟圧の調整を実施することが可能となり、本来不要なベルト挟圧調整の実施を回避して、弦振動による車両部材の共振の抑制をより効率的に図ることができるようになる。
【0071】
(第6の実施の形態)
続いて、本発明のベルト式無段変速機の制御装置を具体化した第6の実施の形態を、上記実施の形態と異なる点を中心に説明する。
上記各実施の形態では、ベルト挟圧の調整に際してのシーブ圧の上昇代、すなわちベルト挟圧の調整量を、副駆動輪である後輪21に配分されるトルク(リアトルク)の大きさに基づいて決定するようにしていた。ただし車両によっては、リアトルクの大きさのモニタを行っていないことがあり、そうした場合には、リアトルクに直接基づくベルト挟圧の調整量の決定は行えないことになる。もっとも、リアトルクの大きさは、電子制御カップリング20の入力トルクと、ベルト式無段変速機12の変速比γとに基づいてその大凡の値を推定することができる。よってリアトルクの大きさをモニタしない場合にも、上記入力トルク及び変速比γに基づいてベルト挟圧の調整量を決定することで、同様のベルト挟圧調整を行うことができる。なお、電子制御カップリング20の入力トルクは、直接検出する以外にも、エンジン10の発生トルクと変速比γとから演算して求めることが可能である。
【0072】
なお以上説明した各実施の形態は、以下のように変更して実施することもできる。
・第1〜第5の実施の形態では、セカンダリプーリ14のトルクをベルト式無段変速機12の出力トルクとして検出し、その検出値をリアトルクの大きさの指標値として用いて、ベルト挟圧の調整を行うようにしていた。もっとも、ベルト式無段変速機12の出力トルクは、エンジン10から後輪21へのトルク伝達経路におけるセカンダリプーリ14から電子制御カップリング20までの部分に配置された任意の回転要素のトルクから求めることが可能である。そこでセカンダリプーリ14に代えて、それら回転要素のトルクの検出値をベルト式無段変速機12の出力トルクとして検出し、その検出値をリアトルクの大きさの指標値として用いて、ベルト挟圧の調整を行うようにしてを良い。また、上記トルク伝達経路における電子制御カップリング20以降の回転要素(後輪21の車軸等)のトルクを検出すれば、リアトルクを直接検出することができ、リアトルクを直接検出してのベルト挟圧の調整を行うことも可能である。
【0073】
・上記実施の形態では、ベルト式無段変速機12のベルト挟圧の調整を、ベルト挟圧をそれまでよりも上昇させることで行うようにしていた。もっとも、ベルト挟圧を低下させることによっても、弦振動の周波数は変化されるため、ベルト挟圧の低下を通じても弦振動による車両部材の共振を抑制することが可能である。例えばベルト挟圧をそれ以上上昇させる余地が無い場合や、ベルト挟圧の上昇よりもその低下によった方が車両部材の共振を回避可能な弦振動周波数を容易に得られる場合などには、弦振動による車両部材の共振に起因した篭り音の抑制をベルト挟圧の低下を通じて図るようにすると良い。
【0074】
・上記実施の形態では、副駆動輪である後輪21へのトルク配分の開始に応じてベルト式無段変速機12のベルト挟圧の調整を行うようにしていた。もっとも、リアトルクがある程度より大きくなるまで、弦振動による車両部材の共振が発生しないのであれば、リアトルクが一定値以上となったときにベルト挟圧の調整を行うようにしても良い。
【0075】
・第1〜第4の実施の形態では、リアトルクの大きさの検出結果に基づいてベルト挟圧の調整量を決定するようにしていた。なお、リアトルクの大きさは、電子制御カップリング20により調整されるため、直接検出せずとも、電子制御カップリング20の制御指令値より把握することもできる。そのため、電子制御カップリング20の制御指令値に基づいてベルト挟圧の調整量を決定するようにしても、同様のベルト挟圧調整を行うことができる。
【0076】
・上記実施の形態では、検出或いは推定されるリアトルクの大きさに基づいてベルト挟圧の調整量を決定するようにしていた。なお上述したようにベルト式無段変速機12のベルト弦部にて発生する弦振動の周波数は、変速比γによって変化するため、弦振動による車両部材の共振の発生を回避可能な適切なベルト挟圧の調整量は、変速比γによって変化することがある。そこで、そうした場合には、ベルト挟圧の調整量を、変速比γに基づいて、或いは必要であれば変速比γとリアトルクの検出、推定の結果とに基づいて決定することで、より効果的に弦振動による車両部材の共振を抑制することができるようになる。
【0077】
・上記各実施の形態では、リアトルクの大きさ等に基づいてベルト挟圧の調整量を決定するようにしていたが、弦振動による車両部材の共振を十分に抑制し得るベルト挟圧の調整量がリアトルクの変化に依らず殆ど変化しない場合には、調整量を常に一律の固定値をするようにしても良い。
【0078】
・上記各実施の形態では、前輪16を主駆動輪とし、後輪21を副駆動輪とする四輪駆動車に搭載されるベルト式無段変速機12を対象として本発明を実施した例を説明したが、後輪を主駆動輪、前輪を副駆動輪とする四輪駆動車に搭載のベルト式無段変速機にも、本発明に係る制御装置を同様に適用することができる。
【0079】
・上記各実施の形態では、二輪駆動走行と四輪駆動走行とを切り替え可能な四輪駆動車に搭載されるベルト式無段変速機12を対象として本発明を実施した例を説明した。もっとも、四輪駆動走行を常時行う四輪駆動車でも、前後輪のトルク配分を状況に応じて切り替えるものでは、そのトルク配分の変更に応じて、車両各部への上記弦振動の伝達状況が変化する。例えば後輪へのトルク分配率が小さいときには、殆ど弦振動の影響を殆ど受けない部材でも、後輪へのトルク分配率が大きくなると、弦振動の影響が無視し得ないほど大きくなることがある。そのため、四輪駆動走行を常時行う四輪駆動車でも、前後輪のトルク配分を変更するものであれば、同様の問題が生じることがある。したがって、こうした常時四輪駆動の四輪駆動車でも、前後輪のトルク配分を状況に応じて切り替えるものであれば、本発明の適用により、ベルト式無段変速機のベルト弦部の弦振動に起因した篭り音の発生の抑制を可能とすることができる。
【図面の簡単な説明】
【0080】
【図1】本発明の第1実施形態についてその適用対象となる四輪駆動車の駆動系の構成を模式的に示す略図。
【図2】同実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【図3】本発明の第2実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【図4】本発明の第3実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【図5】本発明の第4実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【図6】本発明の第5実施形態に採用されるベルト挟圧調整ルーチンの処理手順を示すフローチャート。
【符号の説明】
【0081】
10…エンジン(動力源)、11…トルクコンバータ、12…ベルト式無段変速機、13…プライマリプーリ、14…セカンダリプーリ、15…ベルト、16…前輪(主駆動輪)、17…フロントディファレンシャル、18…トランスファ、19…プロペラシャフト、20…電子制御カップリング、21…後輪(副駆動輪)、22…リアディファレンシャル、23…電子制御ユニット(挟圧調整手段)。
【特許請求の範囲】
【請求項1】
前後輪のトルク配分を可変とする四輪駆動車に搭載されて、入力側及び出力側の2つのプーリに架け渡されたベルトの前記2つのプーリに対する巻掛半径を変更することで変速を行うベルト式無段変速機の制御を行う装置であって、
前記前後輪のトルク配分に応じて、前記プーリのベルト挟圧を調整する挟圧調整手段を備える
ことを特徴とするベルト式無段変速機の制御装置。
【請求項2】
当該四輪駆動車は、主駆動輪のみにトルクを配分して走行を行う二輪駆動走行と前記主駆動輪及び副駆動輪の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものであって、
前記挟圧調整手段は、前記副駆動輪へのトルク配分の開始に応じて前記ベルト挟圧の調整を行う
請求項1に記載のベルト式無段変速機の制御装置。
【請求項3】
前記挟圧調整手段は、前記副駆動輪に伝達される前記トルクの大きさに基づいて前記ベルト挟圧の調整量を決定する
請求項2に記載のベルト式無段変速機の制御装置。
【請求項4】
前記挟圧調整手段は、前記副駆動輪へのトルク分配率を可変とする電子制御カップリングの入力トルクと、前記ベルト式無段変速機の変速比とに基づいて前記ベルト挟圧の調整量を決定する
請求項2に記載のベルト式無段変速機の制御装置。
【請求項5】
前記挟圧調整手段は、前記ベルト挟圧の調整を該ベルト挟圧の上昇により行う
請求項1〜4のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項6】
前記挟圧調整手段は、当該四輪駆動車の操舵角の検出結果に基づいて前記前後輪のトルク配分の状態を確認する
請求項1〜5のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項7】
当該四輪駆動車は、主駆動輪のみにトルクを配分して走行を行う二輪駆動走行と前記主駆動輪及び副駆動輪の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものであって、
前記挟圧調整手段は、当該四輪駆動車の走行モードを前記四輪駆動走行に固定するための固定スイッチの操作状況に基づいて前記前後輪のトルク配分の状態を確認する
請求項1〜6のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項8】
前記挟圧調整手段は、前記ベルト式無段変速機の変速比が規定の範囲にあることを条件に、前記前後輪のトルク配分に応じた前記ベルト挟圧の調整を実施する
請求項1〜7のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項9】
前記挟圧調整手段は、運転者の操作により選択された変速段に対応する変速比に前記ベルト式無段変速機の変速比を固定するシーケンシャルモードにあって、予め設定された特定の変速段が選択されていることを条件に、前記前後輪のトルク配分に応じた前記ベルト挟圧の調整を実施する
請求項1〜8のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項1】
前後輪のトルク配分を可変とする四輪駆動車に搭載されて、入力側及び出力側の2つのプーリに架け渡されたベルトの前記2つのプーリに対する巻掛半径を変更することで変速を行うベルト式無段変速機の制御を行う装置であって、
前記前後輪のトルク配分に応じて、前記プーリのベルト挟圧を調整する挟圧調整手段を備える
ことを特徴とするベルト式無段変速機の制御装置。
【請求項2】
当該四輪駆動車は、主駆動輪のみにトルクを配分して走行を行う二輪駆動走行と前記主駆動輪及び副駆動輪の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものであって、
前記挟圧調整手段は、前記副駆動輪へのトルク配分の開始に応じて前記ベルト挟圧の調整を行う
請求項1に記載のベルト式無段変速機の制御装置。
【請求項3】
前記挟圧調整手段は、前記副駆動輪に伝達される前記トルクの大きさに基づいて前記ベルト挟圧の調整量を決定する
請求項2に記載のベルト式無段変速機の制御装置。
【請求項4】
前記挟圧調整手段は、前記副駆動輪へのトルク分配率を可変とする電子制御カップリングの入力トルクと、前記ベルト式無段変速機の変速比とに基づいて前記ベルト挟圧の調整量を決定する
請求項2に記載のベルト式無段変速機の制御装置。
【請求項5】
前記挟圧調整手段は、前記ベルト挟圧の調整を該ベルト挟圧の上昇により行う
請求項1〜4のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項6】
前記挟圧調整手段は、当該四輪駆動車の操舵角の検出結果に基づいて前記前後輪のトルク配分の状態を確認する
請求項1〜5のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項7】
当該四輪駆動車は、主駆動輪のみにトルクを配分して走行を行う二輪駆動走行と前記主駆動輪及び副駆動輪の双方にトルクを配分して走行を行う四輪駆動走行とを状況に応じて切り替えるものであって、
前記挟圧調整手段は、当該四輪駆動車の走行モードを前記四輪駆動走行に固定するための固定スイッチの操作状況に基づいて前記前後輪のトルク配分の状態を確認する
請求項1〜6のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項8】
前記挟圧調整手段は、前記ベルト式無段変速機の変速比が規定の範囲にあることを条件に、前記前後輪のトルク配分に応じた前記ベルト挟圧の調整を実施する
請求項1〜7のいずれか1項に記載のベルト式無段変速機の制御装置。
【請求項9】
前記挟圧調整手段は、運転者の操作により選択された変速段に対応する変速比に前記ベルト式無段変速機の変速比を固定するシーケンシャルモードにあって、予め設定された特定の変速段が選択されていることを条件に、前記前後輪のトルク配分に応じた前記ベルト挟圧の調整を実施する
請求項1〜8のいずれか1項に記載のベルト式無段変速機の制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−243565(P2009−243565A)
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願番号】特願2008−89988(P2008−89988)
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]