
ベルト搬送装置及び画像加熱装置
【課題】簡易且つ安価な構成によって、ベルトの破損を検出することができるベルト搬送装置、及びそれを用いた画像形成装置を提供する。
【解決手段】エンドレスベルト130と、前記ベルトを回転可能に支持する支持部材と、前記ベルトの幅方向一端の所定の破れを検出するセンサ150と、前記センサを利用して前記ベルトの幅方向他端の所定の破れを検出する検出機構160と、を有する。
【解決手段】エンドレスベルト130と、前記ベルトを回転可能に支持する支持部材と、前記ベルトの幅方向一端の所定の破れを検出するセンサ150と、前記センサを利用して前記ベルトの幅方向他端の所定の破れを検出する検出機構160と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電子写真複写機等の画像形成装置で用いられるベルト搬送装置及び定着装置に関するものである。
【背景技術】
【0002】
従来、画像形成装置において、ベルト定着方式の定着装置(無端ベルト搬送装置、画像加熱装置)が用いられている(特許文献1)。定着ベルトもしくは加圧ベルトに、いわゆるエンドレスベルトを使用したベルトニップ方式の定着装置においては、ベルトの繰り返し屈曲による疲労破損やベルトの片寄り防止規制部材にベルト端部が突き当たることによるベルトの破損が課題となっている。また、ベルトが破損した際に、破損を確実に迅速に検出し、装置を停止させることも重要な課題となっている。
【0003】
そこで、ベルトの破損を迅速に検出して適切な処置をするために下記のような構成が提案されている(特許文献2)。ベルトにマーキングを設け、センサによりマーキング周期の変化により破損を検出する方法が提案されている。また、ベルトに接触子を当接させ、センサにより接触子が非当接になることを検出することによりベルトの破損を検出する方法が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−341346号公報
【特許文献2】特開2002−287542号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ベルト搬送装置や画像加熱装置においては、装置の構成やベルトの製造方法等に起因して、ベルトの破損はベルトの端部において発生しやすい。このため、特許文献2のようにベルトの破損を検出するセンサや接触子を設ける場合、ベルトの両端部にセンサや接触子を設ける必要があり、複雑でコストがかかってしまう。
【0006】
そこで本発明は、簡易且つ安価な構成によって、ベルトの破損を検出することができるベルト搬送装置及び画像加熱装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本発明に係るベルト搬送装置及び画像加熱装置の代表的な構成は、エンドレスベルトと、前記ベルトを回転可能に支持する支持部材と、前記ベルトの幅方向一端の所定の破れを検出するセンサと、前記センサを利用して前記ベルトの幅方向他端の所定の破れを検出する検出機構と、を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、簡易且つ安価な構成によって、ベルトの破損を検出することができる。
【図面の簡単な説明】
【0009】
【図1】(a)第一実施形態に係る画像加熱装置の断面図である。(b)第一実施形態での画像加熱装置の正面図である。
【図2】(a)第一実施形態に係る画像加熱装置の背面図である。(b)第一実施形態に係る画像加熱装置の左側面図である。
【図3】第一実施形態に係る画像形成装置の構成図である。
【図4】(a)第一実施形態に係る画像加熱装置の正面右上方からの斜視図である。(b)第一実施形態に係るセンサの詳細図である。
【図5】(a)第一実施形態に係るスライダー周囲の拡大図である。(b)第一実施形態に係る加熱ベルト破損時のスライダー・センサ周囲の拡大図である。
【図6】第一実施形態に係るベルト片寄り制御のフローチャートである。
【図7】(a)第二実施形態に係るセンサ、スライダー周囲の拡大図である。(b)第二実施形態に係る加熱ベルト破損時のセンサ、スライダー周囲の拡大図である。
【図8】(a)第三実施形態に係るスライダー、コロホルダ周囲の斜視図である。(b)第三実施形態に係るコロホルダ周囲の背面方向からの断面図である。
【図9】(a)第三実施形態に係る加熱ベルト破損時コロホルダ周囲の拡大図である。(b)第三実施形態に係る加熱ベルト破損時のコロホルダ、スライダー周囲の斜視図である。
【図10】(a)第三実施形態に係る画像形成装置の構成図である。(b)第三実施形態に係る画像形成装置の中間転写ベルト24と感光体ドラム20の模式的斜視図である。(c)第三実施形態に係るセンサ、スライダーの斜視図である。
【発明を実施するための形態】
【0010】
[第一実施形態]
本発明に係るベルト搬送装置及び画像加熱装置の第一実施形態について、図を用いて説明する。
【0011】
(画像形成装置)
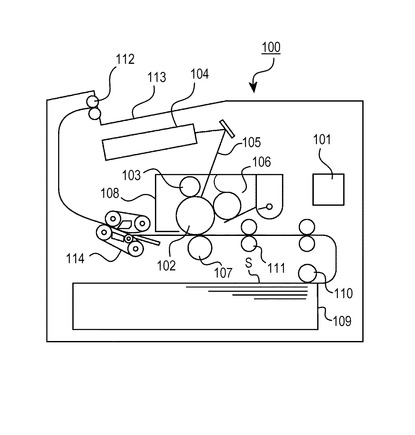
まず、画像形成装置の全体構成について説明する。図3に示すように、本実施形態の電子写真方式を採用した画像形成装置100は、シートSにトナー像を形成する画像形成手段と、画像加熱装置としての定着装置(画像加熱装置)114を有している。
【0012】
画像形成手段は、感光体ドラム(像担持体)102、帯電器(帯電手段)103、露光装置(露光手段)104、現像器(現像手段)106を有している。感光体ドラム102は、帯電器103によって表面を一様に帯電され、露光装置104から画像に応じた光105を照射され、静電潜像が形成される。静電潜像は現像器106によって現像されてトナー像が形成される。
【0013】
一方、シートSは装置下部の給送カセット109に収納されており、給送ローラ110によって給送される。給送されたシートSはレジストローラ対(搬送手段)111によって感光体ドラム102上のトナー像と同期して搬送される。搬送されたシートSは、転写ローラ(転写手段)107によって感光ドラム上のトナー像を静電転写され、定着装置114へ搬送される。定着装置114に搬送されたシートSは、定着装置114によって加熱、加圧され、静電転写されたトナー像を定着される。トナー像が定着されたシートSは排出ローラ対112によって装置上部の排出トレイ113へと搬送排出される。感光体ドラム102上に残留したトナーはクリーニング装置(クリーニング手段)108によって除去される。
【0014】
(定着装置114)
次に図1、図2、図4〜図6を用いて定着装置114について説明する。
【0015】
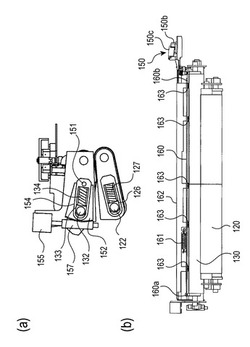
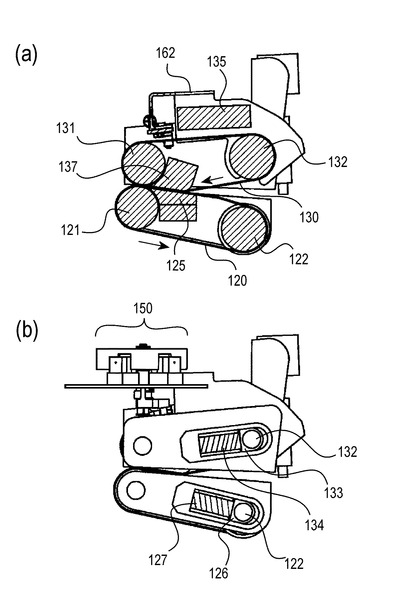
図1(a)は定着装置114の構成図である。図1(a)に示すように、定着装置114は、加圧ベルト(エンドレスベルト)120、加圧ロール(支持部材)121、テンションロール(支持部材)122、加圧パッド125を有している。また、定着装置114は、加熱ベルト(エンドレスベルト)130、駆動ロール(支持部材)131、ステアリングロール(支持部材、ベルトステアリング手段)132、パッドステー137を有している。
【0016】
加圧ベルト120は、2個の支持ロール(加圧ロール121、テンションロール122)に循環回転可能に、且つ、所定の張力(200N)で掛け渡されている。加熱ベルト130は、2個の支持ロール(駆動ロール131、ステアリングロール132)に循環回転可能に、且つ、所定の張力(例えば200N)で掛け渡されている。
【0017】
加圧ベルト120として、厚さ50μm、幅380mm、周長200mmのニッケル金属層に、厚さ300μmのシリコンゴムをコーティングし、表層にPFAチューブを被覆したものが用いられる。加圧ベルト120は、耐熱性を具備したものであれば適宜選定して差し支えない。
【0018】
加熱ベルト130として、厚さ75μm、幅380mm、周長200mmのニッケル金属層もしくはステンレス層などの磁性金属層に、厚さ300μmのシリコンゴムをコーティングし、表層にPFAチューブを被覆したものが用いられる。加熱ベルト130は、誘導加熱コイル135により発熱させられるとともに耐熱性を具備したものであれば適宜選定して差し支えない。
【0019】
加圧ロール121は、中実ステンレスによって外径がφ20に形成されている。図1(b)に示すように、テンションロール122の両端部は、軸受126によって回転可能に且つベルトテンション方向にスライド可能に支持され、テンションバネ127によって加圧ベルト120に2N(20kgf)のテンションを掛けている。図1(a)に示すように、テンションロール122は、ステンレスによって外径がφ20、内径φ18程度に形成された中空ロールである。
【0020】
駆動ロール131は、外部のモータ(不図示)から駆動が入力されて回転し、加熱ベルト130を回転させる。駆動ロール131は、中実ステンレスによって外径がφ18に形成され、芯金表層に耐熱シリコンゴム弾性層を一体成型されている。駆動ロール131は、加圧ロール121の圧接により、弾性層が所定量弾性的に歪む。
【0021】
ステアリングロール132は、加熱ベルト130の移動方向(回転方向)に直交するベルト幅方向の蛇行を調整する。図1(b)に示すように、ステアリングロール132の両端部は、軸受133によって回転可能に且つベルトテンション方向にスライド可能に支持され、テンションバネ134によって加熱ベルト130に2N(20kgf)のテンションを掛けている。図1(a)に示すように、ステアリングロール132は、ステンレスによって外径がφ20、内径φ18程度に形成された中空ロールである。
【0022】
加圧パッド125は、加圧ベルト120の内側、且つ、加圧ベルト120と加熱ベルト130のニップ域の入口側(加圧ロール121より上流側)に設けられている。加圧パッド125は、シリコンゴムで形成されている。パッドステー137は、加熱ベルト130の内側、且つ、加熱ベルト130と加圧ベルト120とのニップ域の入口側(駆動ロール131より上流側)に設けられている。パッドステー137は、ステンレス鋼(SUS材)で形成されている。加圧パッド125とパッドステー137は、加圧ベルト120、加熱ベルト130を介して、所定圧(400N)で付勢されており、加圧ロール121、駆動ロール131とともにニップを形成する。
【0023】
(加熱ベルト130の片寄り制御)
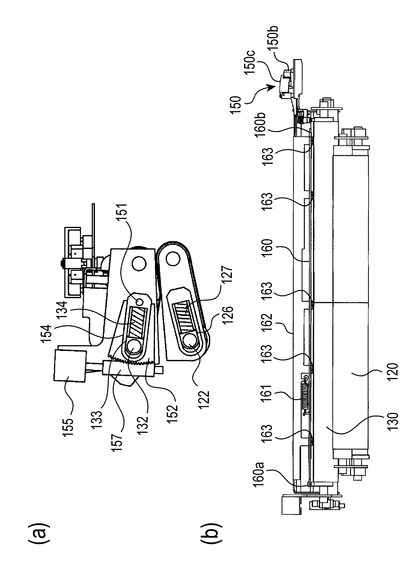
図2(a)に示すように、側板140の外側には、ステアリングロール支持アーム154が設けられている。支持アーム154の一端は、軸151を中心に回動可能に支持されている。支持アーム154の他端には、センサの出力に基づき前記支持部材を変位させる変位機構(扇形ギア152、ステッピングモータ155、ウォーム157)が設けられている。扇形ギア152は、支持アーム154の他端に固定されている。扇形ギア152は、ウォーム157と噛合している。ウォーム157は、ステッピングモータ155の駆動により回転する。
【0024】
図2(b)に示すように、定着装置114は、ベルト幅方向一端にセンサ150を有している。センサ150によって加熱ベルト130の端部位置を検出し、それに応じて、ステッピングモータ155を所定の回転数回転させ、ウォーム157、扇形ギア152を介して、支持アーム154を回動し、ステアリングロール132の傾きを変化させる。これにより、加熱ベルト130の片寄り制御を行っている。
【0025】
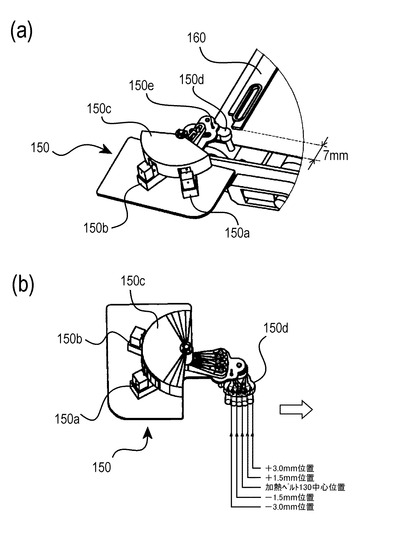
図4(a)に示すように、センサ150は二つのセンサ150a、150b、センサフラグ150c、センサアーム(第1の当接部材)150d、センサバネ(第1の付勢部材)150eを有している。センサアーム150dは、センサバネ150eの付勢力により、加熱ベルト130端面(ベルトの幅方向一端側)に3cN(3gf)の力で押圧当接している。これにより、センサアーム150dは、加熱ベルト130のベルト幅方向の移動に追従して動作する。図4(b)に示すように、センサアーム150dが加熱ベルト130によりベルト幅方向に移動すると、センサフラグ150cがセンサ150a、150bをON、OFFする位置に回動する。このセンサ150a、150bそれぞれのON/OFF信号の組合せより、ベルトの幅方向におけるセンサアーム150dの位置を検出し、加熱ベルト130の位置検出を行う。表1は加熱ベルト130端面位置とセンサ150a、150bのON/OFF信号との関係と、加熱ベルト130端面位置の制御方法とを示す表である。図6は加熱ベルト130の片寄り制御のフローチャートである。
【0026】
【表1】

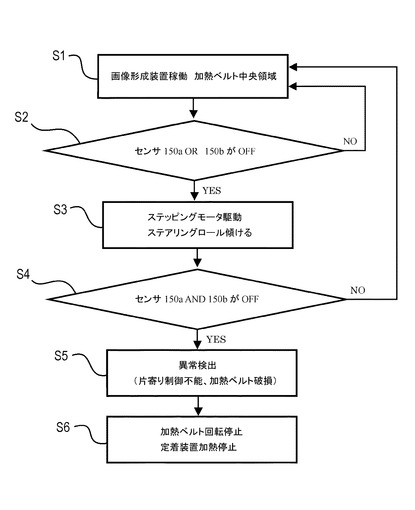
表1、図6に示すように、加熱ベルト130は、センサ150aがON、センサ150bがOFFの第一の位置と150aがOFF、150bがONとなる第二の位置との間の区間を蛇行する。加熱ベルト130は、この区間内に存在するように片寄り制御される。この区間の距離は、ベルト幅方向(加熱ベルト130の回転軸方向)に、中心位置から±1.5mmとなっている。
【0027】
中央領域にある加熱ベルト130が蛇行し(S1)、センサ150aがOFF、150bがONとなることで、中心位置から+1.0mmの位置を検出する(S2)。この検出信号に基づいて、ステッピングモータ155をCW(時計回り)方向に駆動させ、ステアリングロール132を駆動ロール131に対して−2°傾ける(S3)。逆に、センサ150aがON、150bがOFFとなることで(S2)、中心位置から−1.0mmの位置を検出する。そして、ステッピングモータ155をCCW(反時計回り)方向に駆動させ、ステアリングロール132を駆動ロール131に対して+2°傾ける(S3)。これにより、加熱ベルト130は中央領域に戻る方向に移動し、片寄り制御される。
【0028】
加熱ベルト130端面が中心位置から±3mmの位置に移動して片寄り制御ができなくなると、センサ150a、150bが共にOFFとなる(S4)。この時、画像形成装置100は異常発生と判断し(S5)、定着装置114の加熱及び加熱ベルト130の回転動作を停止させる(S6)。
【0029】
(加熱ベルト130の破損検出)
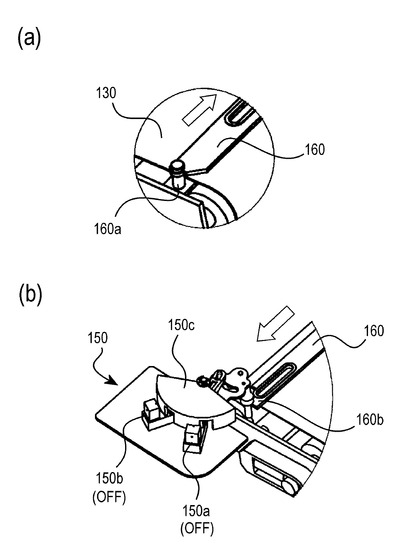
図2(b)に示すように、加熱ベルト130のセンサ150が配置されている側の反対側端部(加熱ベルト130のベルト幅方向他端側)に、スライダー(第2の当接部材、検出機構)160の一端160aが加圧当接している。スライダー160は、誘導加熱コイル保持板162との間に設けられたスライダーバネ161(第2の付勢部材、検出機構)によって15cN(15gf)の力で加圧当接している。スライダー160は、加熱ベルト130の幅方向他端に所定の破れが生じていないときセンサアーム150dがスライダー160によって移動することが無いように、加熱ベルト130の幅方向他端がスライダー160の移動を制限するストッパとして機能する。スライダーバネ161は、加熱ベルト130の幅方向他端の所定の破れに伴いセンサアーム150dがスライダー160によりセンサバネ150eに抗して移動するようにスライダーバネ161を加熱ベルト130の幅方向一端側に向けて付勢する。スライダー160は、誘導加熱コイル保持板162に段ビス163によってシート幅方向に複数箇所で保持されている。スライダー160は、加熱ベルト130の片寄り制御による動きに追従する様に、ベルト幅方向(加熱ベルト130の回転軸方向)に動作可能となっている。
【0030】
図2(b)、図4(a)に示すように、スライダー160は、シート幅方向に加熱ベルト130に沿ってセンサ150近傍まで延びている。スライダー160の他端160bは、センサアーム150dから7mmの距離に配置されている。加熱ベルト130が破損していない通常動作時においては、スライダー160とセンサアーム150dは、それぞれ加熱ベルト130の両端部に加圧当接されており、上記7mmの距離が常に確保された状態で動作する。スライダー160は加熱ベルト130が存在しない場合(通常ではあり得ない状態)では、センサアーム150d側に12mm移動可能となっている。
【0031】
加熱ベルト130のセンサ150側の端面が破損すると、センサアーム150dは図4(b)の矢印方向に移動し、センサ150a、150bが共にOFFの状態(表1中+3.0mmの状態)となり、加熱ベルト130の破損を検出する。この状態において、センサアーム150dとスライダー160が接触しない様に、通常動作時に7mmの距離を確保している。
【0032】
加熱ベルト130のセンサ150側の反対側の端面が破損すると、スライダー160がスライダーバネ161加圧方向(図5(a)、図5(b)の矢印方向)に移動し、7mm移動した位置でスライダー160の他端160bがセンサアーム150dと接触する。そして、それぞれを加圧するバネ力の差(スライダー160は15cN(15gf)、センサアーム150dは3cN(3gf))からスライダー160はセンサアーム150dをスライダー160可動領域の12mm、つまり接触してから5mm押し込む。これにより、センサ150a、150bは、共にOFFとなる状態(表1中−3.0mmの状態)となり、加熱ベルト130の破損を検出する(図5(b)の状態)。
【0033】
加熱ベルト130が破損してセンサ150a、150bが共にOFFとなった際(図6のS4)、片寄り制御不能になった場合と同様、画像形成装置は異常発生と判断する(図6のS5)。そして、定着装置114の加熱及び加熱ベルト130の回転動作を停止させる(図6のS6)。
【0034】
(制御部)
図3に示すように、上述した加熱ベルト130の片寄り制御、破損検出は、制御部101により行われる。制御部101は、CPU、ROM等を有し、センサ150で検出されたセンサ150a、150bのON/OFF信号を受信し、上記制御を行っている。
【0035】
(効果)
本実施形態によれば、加熱ベルト130のベルト幅方向の一端にセンサ150を設けることで、加熱ベルト130のベルト幅方向端部の破損を検出することができる。このため、簡易且つ安価な構成によって、ベルト両端部の破損(ベルトの幅方向一端の所定の破れ、ベルトの幅方向他端の所定の破れ)を検出することができる。また、ここでいうベルトの所定の破れとは、ベルトの破損方向に関わらず、ベルトの幅方向端部の周方向一部分でも、センサ150が異常を検出する軸線方向(ベルト幅方向と直交する方向)長さにベルトが存在しなくなる状況をいう。例えば、ベルトが輪切り状に破損した場合や螺旋状に破損した場合、軸線方向に破損した場合等がある。
【0036】
本実施形態では、加熱・加圧部材が双方ベルトを用いた定着装置について説明したが、どちらかの部材がローラであっても適用することができる。また、本実施形態では、双方がベルトを用いた定着装置で、加熱ベルト側に適用した定着装置について説明したが、加圧ベルト側であっても適用することができ、双方のベルトに適用することもできる。また、上述した例では、この発明(無端ベルト搬送装置)を画像形成装置の加熱定着装置に適用した場合について説明した。しかし、この発明で無端状ベルトは加熱ベルトや加圧ベルトに限らず、静電吸着搬送ベルトや中間転写ベルトを用いた無端ベルト搬送装置であってもよい。また像担持体をベルト状としたときその像担持体ベルトのようなものであってもよい。さらには、画像形成装置に限らず、無端状ベルトの高精度な移動を必要とする作像装置や表示装置などにも、同様に適用することができる。例えば電子黒板の表示ボードのフィルム状ベルト駆動装置、スキャナの原稿搬送ベルトの駆動装置などに適用することができる。
【0037】
本実施形態では、駆動ロール131とステアリングロール132という、2本のローラで加熱ベルト130を懸架する例を示したが、本発明はこれに限定されるものではなく、3本以上のロールがあっても、本発明を適用することにより同様の効果が得られる。
【0038】
[第二実施形態]
次に本発明に係るベルト搬送装置及び画像加熱装置の第二実施形態について図を用いて説明する。上記第一実施形態と説明の重複する部分については、同一の符号を付して説明を省略する。図7はベルト幅方向両端部の斜視図である。
【0039】
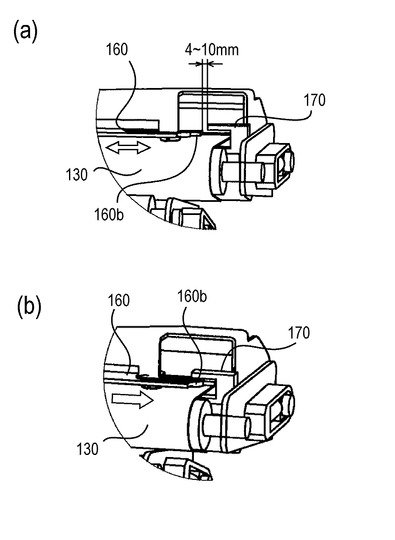
図7に示すように、本実施形態の定着装置114は、上記第一実施形態のセンサ150に変えてセンサ170を設けたものである。センサ170は透過型の非接触センサで、加熱ベルト130の端面位置を検出する。表2は加熱ベルト130端面位置とセンサ170の検出信号との関係と、加熱ベルト130端面位置の制御方法とを示す表である。
【0040】
【表2】
表2に示すように、加熱ベルト130は、上記第一実施形態と同様に、中心位置から±1.5mmの区間内で片寄り制御され、±3.0mmの位置を検出した際には、片寄り制御不能もしくは加熱ベルト130が破損したと判断し、定着装置114の動作を停止する。
【0041】
図7(a)に示すように、加熱ベルト130が最もセンサ170に近づく位置において、スライダー160の他端160bはセンサ170から4mm〜10mmの位置にある。つまり、スライダー160は、通常時はセンサ170の検出範囲外にあり、センサ170の加熱ベルト130を検出には影響を与えない位置関係となっている。
【0042】
加熱ベルト130のセンサ170側の端面が破損した場合、センサ170の検知可能領域に加熱ベルト130が存在しなくなり、その結果、センサ170は±3.0mmの位置を検出した状態となり、加熱ベルト130が破損したと判断し、定着装置114の動作を停止させる。
【0043】
加熱ベルト130のスライダー160当接側の端面が破損した場合、スライダー160は図7(b)に示すように、センサ170側(図7(b)矢印方向)に移動し、センサ170の透過光を遮光する。これにより、センサ170は±3.0mmの位置を検出した状態となり、加熱ベルト130が破損したと判断し、定着装置114の動作を停止させる。
【0044】
(効果)
本実施形態によれば、上記第一実施形態と同様に、1つのセンサ170で加熱ベルト130のベルト幅方向端部の破損を検出することができる。このため、簡易且つ安価な構成によって、ベルトの破損を検出することができる。
【0045】
[第三実施形態]
次に本発明に係るベルト搬送装置及び画像加熱装置の第三実施形態について図を用いて説明する。上記第一実施形態と説明の重複する部分については、同一の符号を付して説明を省略する。図8(a)は本実施形態に係るスライダー、コロホルダ周囲の斜視図である。図8(b)は本実施形態に係るコロホルダ周囲の背面方向からの断面図である。図9(a)は本実施形態に係る加熱ベルト破損時コロホルダ周囲の拡大図である。図9(b)は本実施形態に係る加熱ベルト破損時のコロホルダ、スライダー周囲の斜視図である。
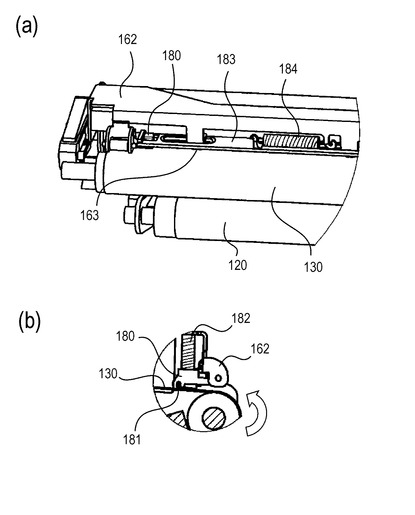
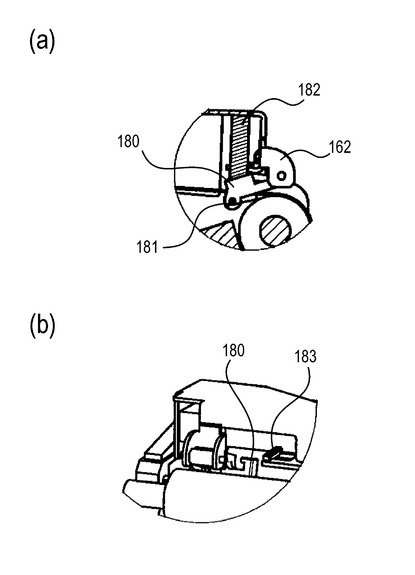
図8に示すように、本実施形態の定着装置114は、上記第一実施形態のスライダー160に変えてスライダー183(第2の当接部材、検出機構)を設け、コロホルダ180、コロ181(第2の当接部材)を設けたものである。コロ181は、センサ150と逆側の加熱ベルト130の非画像域表面に、コロホルダ180によって保持されている。コロ181は、コロホルダ180を介してバネ182(第3の付勢部材)によって加熱ベルト130の幅方向他端側の表面に押圧当接している。コロ181は加熱ベルト130の回転に従動回転する。
【0046】
コロホルダ180は、加熱ベルト130回転軸と平行な回動軸で、誘導加熱コイル保持板162に回動可能に保持されている。コロホルダ180は、コロ181が加熱ベルト130の表面に押し付けられているときセンサアーム150dがスライダー183によって移動することが無いようにスライダー183の移動を制限するストッパ180aを有している。スライダー183は、スライダーバネ184(第2の付勢部材、検出機構)によって、15cN(15gf)の力でセンサ150側に引っ張られており、コロホルダ180のストッパ180aに引っかかることで位置決めされている。スライダー183は、加熱ベルト130回転軸方向にスライド可能とするため、第一実施形態同様、誘導加熱コイル保持板162に段ビス163によって保持されている。
【0047】
加熱ベルト130のセンサ150側の端面が破損すると、上記第一実施形態と同様に、センサアーム150dは図4(b)の矢印方向に移動する。そして、センサ150a、150bが共にOFFの状態(表1中+3.0mmの状態)となり、加熱ベルト130の破損を検出する。
【0048】
加熱ベルト130端部のコロ181当接部分が破損した場合、図9(a)、図9(b)に示すように、コロ181及びコロホルダ180は、加熱ベルト内面側に回動する。これにより、スライダー183とストッパ180aとの引っかかりが外れ、スライダー183は、センサ150方向にバネ力によって移動する。これにより、第一実施形態同様、スライダー183の他端がセンサアーム150dを押し込み、センサ150a、150bは共にOFFとなる状態(表1中−3mmの状態)となり、加熱ベルト130の破損を検出する。
【0049】
画像形成装置は、センサ150a、150bが共にOFFとなった際、片寄り制御不能になった場合と同様、画像形成装置は異常発生と判断し、定着装置114の加熱及び加熱ベルト130の回転動作を停止させる。
【0050】
(効果)
本実施形態によれば、上記第一実施形態と同様に、1つのセンサ150で加熱ベルト130のベルト幅方向端部の破損を検出することができる。このため、簡易且つ安価な構成によって、ベルトの破損を検出することができる。
【0051】
[第四実施形態]
次に本発明に係るベルト搬送装置及び画像加熱装置の第四実施形態について図を用いて説明する。上記第一実施形態と説明の重複する部分については、同一の符号を付して説明を省略する。図10(a)、図10(b)は本実施形態に係る画像形成装置を示すものである。ここでは、まず画像形成装置の全体構成及び中間転写ベルト体周囲の構成について概略説明し、次に本実施形態の特徴であるベルト体の破損検知構成について説明する。
【0052】
{画像形成装置の全体構成}
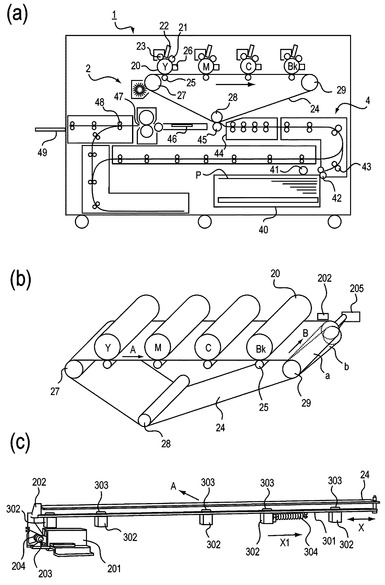
図10(a)は本実施形態の画像形成装置の断面説明図である。図10(a)に示すように、本実施形態の画像形成装置は画像ステーションを4個水平に配置した中間転写方式のカラープリンタを例示している。
【0053】
本実施形態の画像形成装置は、プリンタ本体1の内部の上部に画像形成部2、下部にシート搬送部4とが配置されている。画像形成部2は、イエローY、マゼンタM、シアンC、ブラックBkの各色トナー像を形成する4個の画像形成ステーションが水平方向に配置されている。それぞれの画像形成ステーションには、像担持体としての感光体ドラム20が従動回転可能に設けられている。感光体ドラム20の周囲には感光体ドラム20の表面を帯電する帯電器21、感光体ドラム20に静電潜像を形成するための露光手段としてのLEDユニット22が配置されている。さらに、感光体ドラム上の静電潜像をトナー現像する現像器23、感光体ドラム上の残留トナーを除去するクリーナ26が配置されている。
【0054】
感光体ドラム20の下部には各感光体ドラム20が圧接可能なベルト体としての中間転写ベルト24が回転可能に設けられている。そして、中間転写ベルト24の回転に従動して感光体ドラム20が従動する。また、中間転写ベルト24を介してそれぞれの感光体ドラム20に対向する位置に一次転写ローラ25(画像形成手段)が中間転写ベルト24に圧接して従動回転可能に設けられている。
【0055】
上記中間転写ベルト24は駆動ローラ27、二次転写内ローラ28(転写手段)、テンションローラ29によって張架されている。
【0056】
画像形成に際しては図10(a)の反時計回り方向に回転する各感光体ドラム20に電子写真方式により各色トナー像が形成される。そのトナー像が一次転写ローラ25へのバイアス印加によって、図10(a)の時計回り方向に回転する中間転写ベルト24に順次重ね合わせて転写され、カラー画像が形成される。
【0057】
上記画像形成に同期してシート搬送部から記録媒体である記録シートPが二次転写部へ搬送されてくる。シート搬送部4はシートカセット40に納められた記録シートPが、給送ローラ41および分離ローラ対42によって1枚ずつ分離され、複数の搬送ローラ43によってレジストローラ対44へと搬送されるように構成されている。レジストローラ対44に搬送された記録シートPは中間転写ベルト24上のトナー像の位置とタイミングを合わせて中間転写ベルト24へ搬送される。
【0058】
中間転写ベルト24上のトナー像は二次転写外ローラ45へのバイアス印加により記録シートP上に転写される。その記録シートPは搬送ベルト46により定着装置47へ搬送されてトナー像が定着された後、排出ローラ48により排出トレイ49に排出される。
【0059】
{ベルト寄り制御構成}
本実施形態の画像形成装置は中間転写ベルト24の寄りを検知して補正するように構成されている。次にそのための構成について説明する。図10(b)は本実施形態における画像形成装置の中間転写ベルト24と感光体ドラム20の模式的斜視図である。
【0060】
図10(b)に示すように、駆動ローラ27、二次転写内ローラ28、テンションローラ29によって張架されている中間転写ベルト24は、駆動ローラ27が矢印の方向に回転することによって回転方向(矢印A方向)に回転する。この中間転写ベルト24は、前述したように張架するローラの平行度誤差などにより回転方向と直交するベルト幅方向に寄ることがある。本実施形態の画像形成装置は前記中間転写ベルト24の寄りを寄り検知手段によって検知している。
【0061】
寄り検知手段は、中間転写ベルト24の端部(ベルト幅方向の端部)に配設したベルト端部検知センサ201によって端部位置を検知することで、中間転写ベルト24の寄りを検知する。具体的には、図10(c)に示すように、軸203中心に回転可能に配置された検知アーム(第1の付勢部材)202がバネ204によって中間転写ベルト24の端面に付勢されている。検知アーム202の回動により、中間転写ベルト24の端面位置をセンサ201の出力にて検知する。検知センサ201の検知領域は、中間転写ベルト24端面位置として±5mmを検知可能で、画像形成装置としては±2mm以内に中間転写ベルト24が存在する様に寄り制御を行う。±2mm以外の検知をした場合は、中間転写ベルト24の寄り制御が不能になったか、もしくは中間転写ベルト24が破損したと判断し、中間転写ベルト24の回転を停止させる。一方、図10(b)に示すように、テンションローラ29の長手方向一方端部はわずかな範囲で移動可能に構成されている。そして、テンションローラ29の端部と連結した揺動モータ205を駆動することで、テンションローラ29が上下に揺動し、テンションローラ29が水平方向から傾く。従って、ベルト端部検知センサ201の検知結果に応じてテンションローラ29を揺動させることでベルト寄りを補正することができる。例えばテンションローラ29を、図10(b)のaの位置からbの位置へ下げると、中間転写ベルト24は回転していくに従い下げた側(矢印B方向)に動く(寄っていく)。逆に、テンションローラ29の一端を上げると、矢印B方向と逆方向へ中間転写ベルト24が寄っていく。ベルト端部検知センサ201の検知信号に合わせて、随時このベルト寄り規制動作を行うことで、中間転写ベルト24を安定して回転する。
【0062】
次に、図10(c)に示す、寄り検知手段と中間転写ベルト24の反対端面側に配置した、ベルト破れ検知手段について説明する。スライダー(検出機構)301は中間転写ベルトユニットのフレーム302に段ビス303にて図10(c)に示す矢印X方向に移動可能に支持される。スライダー301はバネ(検出機構)304によって、寄り検知センサ201とは中間転写ベルト24の反対端面に(付勢方向X1方向に)付勢される。スライダー301は中間転写ベルト24に付勢当接している側からセンサ201付近まで延びており、検知アーム202から通常状態で4mm離れて配置される。スライダー301は中間転写ベルト24の基準位置に対して、その付勢方向X1に5mm移動可能、検知アーム202側には10mm移動可能となっている。中間転写ベルト24のスライダー301の当接面側が破損した場合、スライダー301は検知アーム202側へ移動し、検知アーム202を押し込み、検知センサ201は+2mm以外を検知する。
【0063】
(効果)
本実施形態によれば、上記第一実施形態と同様に、1つのセンサ201で中間転写ベルト24のベルト幅方向端部の破損を検出することができる。このため、簡易且つ安価な構成によって、ベルトの破損を検出することができる。なお、本実施形態では、中間転写ベルトを用いたベルト搬送装置について説明したが、中間転写ベルトに変えて、静電吸着ベルトを設けた構成であってもよい。すなわち、搬送ローラ(供給手段)によりシートを静電吸着ベルトへ搬送し、静電吸着ベルトにより搬送されるシートに画像形成手段から直接画像を転写する構成であってもよい。
【符号の説明】
【0064】
S…シート、100…画像形成装置、101…制御部、102…感光ドラム、103…帯電器、104…露光装置、105…光、106…現像器、107…転写ローラ、108…クリーニング装置、109…給送カセット、110…給送ローラ、111…レジストローラ対、112…排出ローラ対、113…排出トレイ、114…定着装置、120…加圧ベルト(エンドレスベルト)、121…加圧ロール(支持部材)、122…テンションロール、125…加圧パッド、126…軸受、127、134…テンションバネ、130…加熱ベルト(エンドレスベルト)、131…駆動ロール(支持部材)、132…ステアリングロール(支持部材)、133…軸受、135…誘導加熱コイル、137…パッドステー、140…側板、150、170…センサ、150c…センサフラグ、150d…センサアーム(第1の当接部材)、150e…センサバネ(第1の付勢部材)、151…軸、152…扇形ギア(変位機構)、153…ステアリングロール軸受、154…ステアリングロール支持アーム、155…ステッピングモータ(変位機構)、156…テンションバネ、157…ウォーム(変位機構)、160、183…スライダー(第2の当接部材、検出機構)、160a…一端、160b…他端、161、184…スライダーバネ(第2の付勢部材、検出機構)、162…誘導加熱コイル保持板、163…段ビス、180…コロホルダ、181…コロ(第2の当接部材)、182…バネ(第3の付勢部材)
【技術分野】
【0001】
本発明は、電子写真複写機等の画像形成装置で用いられるベルト搬送装置及び定着装置に関するものである。
【背景技術】
【0002】
従来、画像形成装置において、ベルト定着方式の定着装置(無端ベルト搬送装置、画像加熱装置)が用いられている(特許文献1)。定着ベルトもしくは加圧ベルトに、いわゆるエンドレスベルトを使用したベルトニップ方式の定着装置においては、ベルトの繰り返し屈曲による疲労破損やベルトの片寄り防止規制部材にベルト端部が突き当たることによるベルトの破損が課題となっている。また、ベルトが破損した際に、破損を確実に迅速に検出し、装置を停止させることも重要な課題となっている。
【0003】
そこで、ベルトの破損を迅速に検出して適切な処置をするために下記のような構成が提案されている(特許文献2)。ベルトにマーキングを設け、センサによりマーキング周期の変化により破損を検出する方法が提案されている。また、ベルトに接触子を当接させ、センサにより接触子が非当接になることを検出することによりベルトの破損を検出する方法が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−341346号公報
【特許文献2】特開2002−287542号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ベルト搬送装置や画像加熱装置においては、装置の構成やベルトの製造方法等に起因して、ベルトの破損はベルトの端部において発生しやすい。このため、特許文献2のようにベルトの破損を検出するセンサや接触子を設ける場合、ベルトの両端部にセンサや接触子を設ける必要があり、複雑でコストがかかってしまう。
【0006】
そこで本発明は、簡易且つ安価な構成によって、ベルトの破損を検出することができるベルト搬送装置及び画像加熱装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために本発明に係るベルト搬送装置及び画像加熱装置の代表的な構成は、エンドレスベルトと、前記ベルトを回転可能に支持する支持部材と、前記ベルトの幅方向一端の所定の破れを検出するセンサと、前記センサを利用して前記ベルトの幅方向他端の所定の破れを検出する検出機構と、を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、簡易且つ安価な構成によって、ベルトの破損を検出することができる。
【図面の簡単な説明】
【0009】
【図1】(a)第一実施形態に係る画像加熱装置の断面図である。(b)第一実施形態での画像加熱装置の正面図である。
【図2】(a)第一実施形態に係る画像加熱装置の背面図である。(b)第一実施形態に係る画像加熱装置の左側面図である。
【図3】第一実施形態に係る画像形成装置の構成図である。
【図4】(a)第一実施形態に係る画像加熱装置の正面右上方からの斜視図である。(b)第一実施形態に係るセンサの詳細図である。
【図5】(a)第一実施形態に係るスライダー周囲の拡大図である。(b)第一実施形態に係る加熱ベルト破損時のスライダー・センサ周囲の拡大図である。
【図6】第一実施形態に係るベルト片寄り制御のフローチャートである。
【図7】(a)第二実施形態に係るセンサ、スライダー周囲の拡大図である。(b)第二実施形態に係る加熱ベルト破損時のセンサ、スライダー周囲の拡大図である。
【図8】(a)第三実施形態に係るスライダー、コロホルダ周囲の斜視図である。(b)第三実施形態に係るコロホルダ周囲の背面方向からの断面図である。
【図9】(a)第三実施形態に係る加熱ベルト破損時コロホルダ周囲の拡大図である。(b)第三実施形態に係る加熱ベルト破損時のコロホルダ、スライダー周囲の斜視図である。
【図10】(a)第三実施形態に係る画像形成装置の構成図である。(b)第三実施形態に係る画像形成装置の中間転写ベルト24と感光体ドラム20の模式的斜視図である。(c)第三実施形態に係るセンサ、スライダーの斜視図である。
【発明を実施するための形態】
【0010】
[第一実施形態]
本発明に係るベルト搬送装置及び画像加熱装置の第一実施形態について、図を用いて説明する。
【0011】
(画像形成装置)
まず、画像形成装置の全体構成について説明する。図3に示すように、本実施形態の電子写真方式を採用した画像形成装置100は、シートSにトナー像を形成する画像形成手段と、画像加熱装置としての定着装置(画像加熱装置)114を有している。
【0012】
画像形成手段は、感光体ドラム(像担持体)102、帯電器(帯電手段)103、露光装置(露光手段)104、現像器(現像手段)106を有している。感光体ドラム102は、帯電器103によって表面を一様に帯電され、露光装置104から画像に応じた光105を照射され、静電潜像が形成される。静電潜像は現像器106によって現像されてトナー像が形成される。
【0013】
一方、シートSは装置下部の給送カセット109に収納されており、給送ローラ110によって給送される。給送されたシートSはレジストローラ対(搬送手段)111によって感光体ドラム102上のトナー像と同期して搬送される。搬送されたシートSは、転写ローラ(転写手段)107によって感光ドラム上のトナー像を静電転写され、定着装置114へ搬送される。定着装置114に搬送されたシートSは、定着装置114によって加熱、加圧され、静電転写されたトナー像を定着される。トナー像が定着されたシートSは排出ローラ対112によって装置上部の排出トレイ113へと搬送排出される。感光体ドラム102上に残留したトナーはクリーニング装置(クリーニング手段)108によって除去される。
【0014】
(定着装置114)
次に図1、図2、図4〜図6を用いて定着装置114について説明する。
【0015】
図1(a)は定着装置114の構成図である。図1(a)に示すように、定着装置114は、加圧ベルト(エンドレスベルト)120、加圧ロール(支持部材)121、テンションロール(支持部材)122、加圧パッド125を有している。また、定着装置114は、加熱ベルト(エンドレスベルト)130、駆動ロール(支持部材)131、ステアリングロール(支持部材、ベルトステアリング手段)132、パッドステー137を有している。
【0016】
加圧ベルト120は、2個の支持ロール(加圧ロール121、テンションロール122)に循環回転可能に、且つ、所定の張力(200N)で掛け渡されている。加熱ベルト130は、2個の支持ロール(駆動ロール131、ステアリングロール132)に循環回転可能に、且つ、所定の張力(例えば200N)で掛け渡されている。
【0017】
加圧ベルト120として、厚さ50μm、幅380mm、周長200mmのニッケル金属層に、厚さ300μmのシリコンゴムをコーティングし、表層にPFAチューブを被覆したものが用いられる。加圧ベルト120は、耐熱性を具備したものであれば適宜選定して差し支えない。
【0018】
加熱ベルト130として、厚さ75μm、幅380mm、周長200mmのニッケル金属層もしくはステンレス層などの磁性金属層に、厚さ300μmのシリコンゴムをコーティングし、表層にPFAチューブを被覆したものが用いられる。加熱ベルト130は、誘導加熱コイル135により発熱させられるとともに耐熱性を具備したものであれば適宜選定して差し支えない。
【0019】
加圧ロール121は、中実ステンレスによって外径がφ20に形成されている。図1(b)に示すように、テンションロール122の両端部は、軸受126によって回転可能に且つベルトテンション方向にスライド可能に支持され、テンションバネ127によって加圧ベルト120に2N(20kgf)のテンションを掛けている。図1(a)に示すように、テンションロール122は、ステンレスによって外径がφ20、内径φ18程度に形成された中空ロールである。
【0020】
駆動ロール131は、外部のモータ(不図示)から駆動が入力されて回転し、加熱ベルト130を回転させる。駆動ロール131は、中実ステンレスによって外径がφ18に形成され、芯金表層に耐熱シリコンゴム弾性層を一体成型されている。駆動ロール131は、加圧ロール121の圧接により、弾性層が所定量弾性的に歪む。
【0021】
ステアリングロール132は、加熱ベルト130の移動方向(回転方向)に直交するベルト幅方向の蛇行を調整する。図1(b)に示すように、ステアリングロール132の両端部は、軸受133によって回転可能に且つベルトテンション方向にスライド可能に支持され、テンションバネ134によって加熱ベルト130に2N(20kgf)のテンションを掛けている。図1(a)に示すように、ステアリングロール132は、ステンレスによって外径がφ20、内径φ18程度に形成された中空ロールである。
【0022】
加圧パッド125は、加圧ベルト120の内側、且つ、加圧ベルト120と加熱ベルト130のニップ域の入口側(加圧ロール121より上流側)に設けられている。加圧パッド125は、シリコンゴムで形成されている。パッドステー137は、加熱ベルト130の内側、且つ、加熱ベルト130と加圧ベルト120とのニップ域の入口側(駆動ロール131より上流側)に設けられている。パッドステー137は、ステンレス鋼(SUS材)で形成されている。加圧パッド125とパッドステー137は、加圧ベルト120、加熱ベルト130を介して、所定圧(400N)で付勢されており、加圧ロール121、駆動ロール131とともにニップを形成する。
【0023】
(加熱ベルト130の片寄り制御)
図2(a)に示すように、側板140の外側には、ステアリングロール支持アーム154が設けられている。支持アーム154の一端は、軸151を中心に回動可能に支持されている。支持アーム154の他端には、センサの出力に基づき前記支持部材を変位させる変位機構(扇形ギア152、ステッピングモータ155、ウォーム157)が設けられている。扇形ギア152は、支持アーム154の他端に固定されている。扇形ギア152は、ウォーム157と噛合している。ウォーム157は、ステッピングモータ155の駆動により回転する。
【0024】
図2(b)に示すように、定着装置114は、ベルト幅方向一端にセンサ150を有している。センサ150によって加熱ベルト130の端部位置を検出し、それに応じて、ステッピングモータ155を所定の回転数回転させ、ウォーム157、扇形ギア152を介して、支持アーム154を回動し、ステアリングロール132の傾きを変化させる。これにより、加熱ベルト130の片寄り制御を行っている。
【0025】
図4(a)に示すように、センサ150は二つのセンサ150a、150b、センサフラグ150c、センサアーム(第1の当接部材)150d、センサバネ(第1の付勢部材)150eを有している。センサアーム150dは、センサバネ150eの付勢力により、加熱ベルト130端面(ベルトの幅方向一端側)に3cN(3gf)の力で押圧当接している。これにより、センサアーム150dは、加熱ベルト130のベルト幅方向の移動に追従して動作する。図4(b)に示すように、センサアーム150dが加熱ベルト130によりベルト幅方向に移動すると、センサフラグ150cがセンサ150a、150bをON、OFFする位置に回動する。このセンサ150a、150bそれぞれのON/OFF信号の組合せより、ベルトの幅方向におけるセンサアーム150dの位置を検出し、加熱ベルト130の位置検出を行う。表1は加熱ベルト130端面位置とセンサ150a、150bのON/OFF信号との関係と、加熱ベルト130端面位置の制御方法とを示す表である。図6は加熱ベルト130の片寄り制御のフローチャートである。
【0026】
【表1】
表1、図6に示すように、加熱ベルト130は、センサ150aがON、センサ150bがOFFの第一の位置と150aがOFF、150bがONとなる第二の位置との間の区間を蛇行する。加熱ベルト130は、この区間内に存在するように片寄り制御される。この区間の距離は、ベルト幅方向(加熱ベルト130の回転軸方向)に、中心位置から±1.5mmとなっている。
【0027】
中央領域にある加熱ベルト130が蛇行し(S1)、センサ150aがOFF、150bがONとなることで、中心位置から+1.0mmの位置を検出する(S2)。この検出信号に基づいて、ステッピングモータ155をCW(時計回り)方向に駆動させ、ステアリングロール132を駆動ロール131に対して−2°傾ける(S3)。逆に、センサ150aがON、150bがOFFとなることで(S2)、中心位置から−1.0mmの位置を検出する。そして、ステッピングモータ155をCCW(反時計回り)方向に駆動させ、ステアリングロール132を駆動ロール131に対して+2°傾ける(S3)。これにより、加熱ベルト130は中央領域に戻る方向に移動し、片寄り制御される。
【0028】
加熱ベルト130端面が中心位置から±3mmの位置に移動して片寄り制御ができなくなると、センサ150a、150bが共にOFFとなる(S4)。この時、画像形成装置100は異常発生と判断し(S5)、定着装置114の加熱及び加熱ベルト130の回転動作を停止させる(S6)。
【0029】
(加熱ベルト130の破損検出)
図2(b)に示すように、加熱ベルト130のセンサ150が配置されている側の反対側端部(加熱ベルト130のベルト幅方向他端側)に、スライダー(第2の当接部材、検出機構)160の一端160aが加圧当接している。スライダー160は、誘導加熱コイル保持板162との間に設けられたスライダーバネ161(第2の付勢部材、検出機構)によって15cN(15gf)の力で加圧当接している。スライダー160は、加熱ベルト130の幅方向他端に所定の破れが生じていないときセンサアーム150dがスライダー160によって移動することが無いように、加熱ベルト130の幅方向他端がスライダー160の移動を制限するストッパとして機能する。スライダーバネ161は、加熱ベルト130の幅方向他端の所定の破れに伴いセンサアーム150dがスライダー160によりセンサバネ150eに抗して移動するようにスライダーバネ161を加熱ベルト130の幅方向一端側に向けて付勢する。スライダー160は、誘導加熱コイル保持板162に段ビス163によってシート幅方向に複数箇所で保持されている。スライダー160は、加熱ベルト130の片寄り制御による動きに追従する様に、ベルト幅方向(加熱ベルト130の回転軸方向)に動作可能となっている。
【0030】
図2(b)、図4(a)に示すように、スライダー160は、シート幅方向に加熱ベルト130に沿ってセンサ150近傍まで延びている。スライダー160の他端160bは、センサアーム150dから7mmの距離に配置されている。加熱ベルト130が破損していない通常動作時においては、スライダー160とセンサアーム150dは、それぞれ加熱ベルト130の両端部に加圧当接されており、上記7mmの距離が常に確保された状態で動作する。スライダー160は加熱ベルト130が存在しない場合(通常ではあり得ない状態)では、センサアーム150d側に12mm移動可能となっている。
【0031】
加熱ベルト130のセンサ150側の端面が破損すると、センサアーム150dは図4(b)の矢印方向に移動し、センサ150a、150bが共にOFFの状態(表1中+3.0mmの状態)となり、加熱ベルト130の破損を検出する。この状態において、センサアーム150dとスライダー160が接触しない様に、通常動作時に7mmの距離を確保している。
【0032】
加熱ベルト130のセンサ150側の反対側の端面が破損すると、スライダー160がスライダーバネ161加圧方向(図5(a)、図5(b)の矢印方向)に移動し、7mm移動した位置でスライダー160の他端160bがセンサアーム150dと接触する。そして、それぞれを加圧するバネ力の差(スライダー160は15cN(15gf)、センサアーム150dは3cN(3gf))からスライダー160はセンサアーム150dをスライダー160可動領域の12mm、つまり接触してから5mm押し込む。これにより、センサ150a、150bは、共にOFFとなる状態(表1中−3.0mmの状態)となり、加熱ベルト130の破損を検出する(図5(b)の状態)。
【0033】
加熱ベルト130が破損してセンサ150a、150bが共にOFFとなった際(図6のS4)、片寄り制御不能になった場合と同様、画像形成装置は異常発生と判断する(図6のS5)。そして、定着装置114の加熱及び加熱ベルト130の回転動作を停止させる(図6のS6)。
【0034】
(制御部)
図3に示すように、上述した加熱ベルト130の片寄り制御、破損検出は、制御部101により行われる。制御部101は、CPU、ROM等を有し、センサ150で検出されたセンサ150a、150bのON/OFF信号を受信し、上記制御を行っている。
【0035】
(効果)
本実施形態によれば、加熱ベルト130のベルト幅方向の一端にセンサ150を設けることで、加熱ベルト130のベルト幅方向端部の破損を検出することができる。このため、簡易且つ安価な構成によって、ベルト両端部の破損(ベルトの幅方向一端の所定の破れ、ベルトの幅方向他端の所定の破れ)を検出することができる。また、ここでいうベルトの所定の破れとは、ベルトの破損方向に関わらず、ベルトの幅方向端部の周方向一部分でも、センサ150が異常を検出する軸線方向(ベルト幅方向と直交する方向)長さにベルトが存在しなくなる状況をいう。例えば、ベルトが輪切り状に破損した場合や螺旋状に破損した場合、軸線方向に破損した場合等がある。
【0036】
本実施形態では、加熱・加圧部材が双方ベルトを用いた定着装置について説明したが、どちらかの部材がローラであっても適用することができる。また、本実施形態では、双方がベルトを用いた定着装置で、加熱ベルト側に適用した定着装置について説明したが、加圧ベルト側であっても適用することができ、双方のベルトに適用することもできる。また、上述した例では、この発明(無端ベルト搬送装置)を画像形成装置の加熱定着装置に適用した場合について説明した。しかし、この発明で無端状ベルトは加熱ベルトや加圧ベルトに限らず、静電吸着搬送ベルトや中間転写ベルトを用いた無端ベルト搬送装置であってもよい。また像担持体をベルト状としたときその像担持体ベルトのようなものであってもよい。さらには、画像形成装置に限らず、無端状ベルトの高精度な移動を必要とする作像装置や表示装置などにも、同様に適用することができる。例えば電子黒板の表示ボードのフィルム状ベルト駆動装置、スキャナの原稿搬送ベルトの駆動装置などに適用することができる。
【0037】
本実施形態では、駆動ロール131とステアリングロール132という、2本のローラで加熱ベルト130を懸架する例を示したが、本発明はこれに限定されるものではなく、3本以上のロールがあっても、本発明を適用することにより同様の効果が得られる。
【0038】
[第二実施形態]
次に本発明に係るベルト搬送装置及び画像加熱装置の第二実施形態について図を用いて説明する。上記第一実施形態と説明の重複する部分については、同一の符号を付して説明を省略する。図7はベルト幅方向両端部の斜視図である。
【0039】
図7に示すように、本実施形態の定着装置114は、上記第一実施形態のセンサ150に変えてセンサ170を設けたものである。センサ170は透過型の非接触センサで、加熱ベルト130の端面位置を検出する。表2は加熱ベルト130端面位置とセンサ170の検出信号との関係と、加熱ベルト130端面位置の制御方法とを示す表である。
【0040】
【表2】
表2に示すように、加熱ベルト130は、上記第一実施形態と同様に、中心位置から±1.5mmの区間内で片寄り制御され、±3.0mmの位置を検出した際には、片寄り制御不能もしくは加熱ベルト130が破損したと判断し、定着装置114の動作を停止する。
【0041】
図7(a)に示すように、加熱ベルト130が最もセンサ170に近づく位置において、スライダー160の他端160bはセンサ170から4mm〜10mmの位置にある。つまり、スライダー160は、通常時はセンサ170の検出範囲外にあり、センサ170の加熱ベルト130を検出には影響を与えない位置関係となっている。
【0042】
加熱ベルト130のセンサ170側の端面が破損した場合、センサ170の検知可能領域に加熱ベルト130が存在しなくなり、その結果、センサ170は±3.0mmの位置を検出した状態となり、加熱ベルト130が破損したと判断し、定着装置114の動作を停止させる。
【0043】
加熱ベルト130のスライダー160当接側の端面が破損した場合、スライダー160は図7(b)に示すように、センサ170側(図7(b)矢印方向)に移動し、センサ170の透過光を遮光する。これにより、センサ170は±3.0mmの位置を検出した状態となり、加熱ベルト130が破損したと判断し、定着装置114の動作を停止させる。
【0044】
(効果)
本実施形態によれば、上記第一実施形態と同様に、1つのセンサ170で加熱ベルト130のベルト幅方向端部の破損を検出することができる。このため、簡易且つ安価な構成によって、ベルトの破損を検出することができる。
【0045】
[第三実施形態]
次に本発明に係るベルト搬送装置及び画像加熱装置の第三実施形態について図を用いて説明する。上記第一実施形態と説明の重複する部分については、同一の符号を付して説明を省略する。図8(a)は本実施形態に係るスライダー、コロホルダ周囲の斜視図である。図8(b)は本実施形態に係るコロホルダ周囲の背面方向からの断面図である。図9(a)は本実施形態に係る加熱ベルト破損時コロホルダ周囲の拡大図である。図9(b)は本実施形態に係る加熱ベルト破損時のコロホルダ、スライダー周囲の斜視図である。
図8に示すように、本実施形態の定着装置114は、上記第一実施形態のスライダー160に変えてスライダー183(第2の当接部材、検出機構)を設け、コロホルダ180、コロ181(第2の当接部材)を設けたものである。コロ181は、センサ150と逆側の加熱ベルト130の非画像域表面に、コロホルダ180によって保持されている。コロ181は、コロホルダ180を介してバネ182(第3の付勢部材)によって加熱ベルト130の幅方向他端側の表面に押圧当接している。コロ181は加熱ベルト130の回転に従動回転する。
【0046】
コロホルダ180は、加熱ベルト130回転軸と平行な回動軸で、誘導加熱コイル保持板162に回動可能に保持されている。コロホルダ180は、コロ181が加熱ベルト130の表面に押し付けられているときセンサアーム150dがスライダー183によって移動することが無いようにスライダー183の移動を制限するストッパ180aを有している。スライダー183は、スライダーバネ184(第2の付勢部材、検出機構)によって、15cN(15gf)の力でセンサ150側に引っ張られており、コロホルダ180のストッパ180aに引っかかることで位置決めされている。スライダー183は、加熱ベルト130回転軸方向にスライド可能とするため、第一実施形態同様、誘導加熱コイル保持板162に段ビス163によって保持されている。
【0047】
加熱ベルト130のセンサ150側の端面が破損すると、上記第一実施形態と同様に、センサアーム150dは図4(b)の矢印方向に移動する。そして、センサ150a、150bが共にOFFの状態(表1中+3.0mmの状態)となり、加熱ベルト130の破損を検出する。
【0048】
加熱ベルト130端部のコロ181当接部分が破損した場合、図9(a)、図9(b)に示すように、コロ181及びコロホルダ180は、加熱ベルト内面側に回動する。これにより、スライダー183とストッパ180aとの引っかかりが外れ、スライダー183は、センサ150方向にバネ力によって移動する。これにより、第一実施形態同様、スライダー183の他端がセンサアーム150dを押し込み、センサ150a、150bは共にOFFとなる状態(表1中−3mmの状態)となり、加熱ベルト130の破損を検出する。
【0049】
画像形成装置は、センサ150a、150bが共にOFFとなった際、片寄り制御不能になった場合と同様、画像形成装置は異常発生と判断し、定着装置114の加熱及び加熱ベルト130の回転動作を停止させる。
【0050】
(効果)
本実施形態によれば、上記第一実施形態と同様に、1つのセンサ150で加熱ベルト130のベルト幅方向端部の破損を検出することができる。このため、簡易且つ安価な構成によって、ベルトの破損を検出することができる。
【0051】
[第四実施形態]
次に本発明に係るベルト搬送装置及び画像加熱装置の第四実施形態について図を用いて説明する。上記第一実施形態と説明の重複する部分については、同一の符号を付して説明を省略する。図10(a)、図10(b)は本実施形態に係る画像形成装置を示すものである。ここでは、まず画像形成装置の全体構成及び中間転写ベルト体周囲の構成について概略説明し、次に本実施形態の特徴であるベルト体の破損検知構成について説明する。
【0052】
{画像形成装置の全体構成}
図10(a)は本実施形態の画像形成装置の断面説明図である。図10(a)に示すように、本実施形態の画像形成装置は画像ステーションを4個水平に配置した中間転写方式のカラープリンタを例示している。
【0053】
本実施形態の画像形成装置は、プリンタ本体1の内部の上部に画像形成部2、下部にシート搬送部4とが配置されている。画像形成部2は、イエローY、マゼンタM、シアンC、ブラックBkの各色トナー像を形成する4個の画像形成ステーションが水平方向に配置されている。それぞれの画像形成ステーションには、像担持体としての感光体ドラム20が従動回転可能に設けられている。感光体ドラム20の周囲には感光体ドラム20の表面を帯電する帯電器21、感光体ドラム20に静電潜像を形成するための露光手段としてのLEDユニット22が配置されている。さらに、感光体ドラム上の静電潜像をトナー現像する現像器23、感光体ドラム上の残留トナーを除去するクリーナ26が配置されている。
【0054】
感光体ドラム20の下部には各感光体ドラム20が圧接可能なベルト体としての中間転写ベルト24が回転可能に設けられている。そして、中間転写ベルト24の回転に従動して感光体ドラム20が従動する。また、中間転写ベルト24を介してそれぞれの感光体ドラム20に対向する位置に一次転写ローラ25(画像形成手段)が中間転写ベルト24に圧接して従動回転可能に設けられている。
【0055】
上記中間転写ベルト24は駆動ローラ27、二次転写内ローラ28(転写手段)、テンションローラ29によって張架されている。
【0056】
画像形成に際しては図10(a)の反時計回り方向に回転する各感光体ドラム20に電子写真方式により各色トナー像が形成される。そのトナー像が一次転写ローラ25へのバイアス印加によって、図10(a)の時計回り方向に回転する中間転写ベルト24に順次重ね合わせて転写され、カラー画像が形成される。
【0057】
上記画像形成に同期してシート搬送部から記録媒体である記録シートPが二次転写部へ搬送されてくる。シート搬送部4はシートカセット40に納められた記録シートPが、給送ローラ41および分離ローラ対42によって1枚ずつ分離され、複数の搬送ローラ43によってレジストローラ対44へと搬送されるように構成されている。レジストローラ対44に搬送された記録シートPは中間転写ベルト24上のトナー像の位置とタイミングを合わせて中間転写ベルト24へ搬送される。
【0058】
中間転写ベルト24上のトナー像は二次転写外ローラ45へのバイアス印加により記録シートP上に転写される。その記録シートPは搬送ベルト46により定着装置47へ搬送されてトナー像が定着された後、排出ローラ48により排出トレイ49に排出される。
【0059】
{ベルト寄り制御構成}
本実施形態の画像形成装置は中間転写ベルト24の寄りを検知して補正するように構成されている。次にそのための構成について説明する。図10(b)は本実施形態における画像形成装置の中間転写ベルト24と感光体ドラム20の模式的斜視図である。
【0060】
図10(b)に示すように、駆動ローラ27、二次転写内ローラ28、テンションローラ29によって張架されている中間転写ベルト24は、駆動ローラ27が矢印の方向に回転することによって回転方向(矢印A方向)に回転する。この中間転写ベルト24は、前述したように張架するローラの平行度誤差などにより回転方向と直交するベルト幅方向に寄ることがある。本実施形態の画像形成装置は前記中間転写ベルト24の寄りを寄り検知手段によって検知している。
【0061】
寄り検知手段は、中間転写ベルト24の端部(ベルト幅方向の端部)に配設したベルト端部検知センサ201によって端部位置を検知することで、中間転写ベルト24の寄りを検知する。具体的には、図10(c)に示すように、軸203中心に回転可能に配置された検知アーム(第1の付勢部材)202がバネ204によって中間転写ベルト24の端面に付勢されている。検知アーム202の回動により、中間転写ベルト24の端面位置をセンサ201の出力にて検知する。検知センサ201の検知領域は、中間転写ベルト24端面位置として±5mmを検知可能で、画像形成装置としては±2mm以内に中間転写ベルト24が存在する様に寄り制御を行う。±2mm以外の検知をした場合は、中間転写ベルト24の寄り制御が不能になったか、もしくは中間転写ベルト24が破損したと判断し、中間転写ベルト24の回転を停止させる。一方、図10(b)に示すように、テンションローラ29の長手方向一方端部はわずかな範囲で移動可能に構成されている。そして、テンションローラ29の端部と連結した揺動モータ205を駆動することで、テンションローラ29が上下に揺動し、テンションローラ29が水平方向から傾く。従って、ベルト端部検知センサ201の検知結果に応じてテンションローラ29を揺動させることでベルト寄りを補正することができる。例えばテンションローラ29を、図10(b)のaの位置からbの位置へ下げると、中間転写ベルト24は回転していくに従い下げた側(矢印B方向)に動く(寄っていく)。逆に、テンションローラ29の一端を上げると、矢印B方向と逆方向へ中間転写ベルト24が寄っていく。ベルト端部検知センサ201の検知信号に合わせて、随時このベルト寄り規制動作を行うことで、中間転写ベルト24を安定して回転する。
【0062】
次に、図10(c)に示す、寄り検知手段と中間転写ベルト24の反対端面側に配置した、ベルト破れ検知手段について説明する。スライダー(検出機構)301は中間転写ベルトユニットのフレーム302に段ビス303にて図10(c)に示す矢印X方向に移動可能に支持される。スライダー301はバネ(検出機構)304によって、寄り検知センサ201とは中間転写ベルト24の反対端面に(付勢方向X1方向に)付勢される。スライダー301は中間転写ベルト24に付勢当接している側からセンサ201付近まで延びており、検知アーム202から通常状態で4mm離れて配置される。スライダー301は中間転写ベルト24の基準位置に対して、その付勢方向X1に5mm移動可能、検知アーム202側には10mm移動可能となっている。中間転写ベルト24のスライダー301の当接面側が破損した場合、スライダー301は検知アーム202側へ移動し、検知アーム202を押し込み、検知センサ201は+2mm以外を検知する。
【0063】
(効果)
本実施形態によれば、上記第一実施形態と同様に、1つのセンサ201で中間転写ベルト24のベルト幅方向端部の破損を検出することができる。このため、簡易且つ安価な構成によって、ベルトの破損を検出することができる。なお、本実施形態では、中間転写ベルトを用いたベルト搬送装置について説明したが、中間転写ベルトに変えて、静電吸着ベルトを設けた構成であってもよい。すなわち、搬送ローラ(供給手段)によりシートを静電吸着ベルトへ搬送し、静電吸着ベルトにより搬送されるシートに画像形成手段から直接画像を転写する構成であってもよい。
【符号の説明】
【0064】
S…シート、100…画像形成装置、101…制御部、102…感光ドラム、103…帯電器、104…露光装置、105…光、106…現像器、107…転写ローラ、108…クリーニング装置、109…給送カセット、110…給送ローラ、111…レジストローラ対、112…排出ローラ対、113…排出トレイ、114…定着装置、120…加圧ベルト(エンドレスベルト)、121…加圧ロール(支持部材)、122…テンションロール、125…加圧パッド、126…軸受、127、134…テンションバネ、130…加熱ベルト(エンドレスベルト)、131…駆動ロール(支持部材)、132…ステアリングロール(支持部材)、133…軸受、135…誘導加熱コイル、137…パッドステー、140…側板、150、170…センサ、150c…センサフラグ、150d…センサアーム(第1の当接部材)、150e…センサバネ(第1の付勢部材)、151…軸、152…扇形ギア(変位機構)、153…ステアリングロール軸受、154…ステアリングロール支持アーム、155…ステッピングモータ(変位機構)、156…テンションバネ、157…ウォーム(変位機構)、160、183…スライダー(第2の当接部材、検出機構)、160a…一端、160b…他端、161、184…スライダーバネ(第2の付勢部材、検出機構)、162…誘導加熱コイル保持板、163…段ビス、180…コロホルダ、181…コロ(第2の当接部材)、182…バネ(第3の付勢部材)
【特許請求の範囲】
【請求項1】
エンドレスベルトと、
前記ベルトを回転可能に支持する支持部材と、
前記ベルトの幅方向一端の所定の破れを検出するセンサと、
前記センサを利用して前記ベルトの幅方向他端の所定の破れを検出する検出機構と、
を有することを特徴とするベルト搬送装置。
【請求項2】
エンドレスベルトと、
前記ベルトを回転可能に支持する支持部材と、
前記ベルトの幅方向一端側と当接する第1の当接部材と、
前記第1の当接部材を前記ベルトの幅方向他端側に向けて付勢する第1の付勢部材と、
前記ベルトの幅方向における前記第1の当接部材の位置を検出するセンサと、
前記センサの出力に基づき前記支持部材を変位させる変位機構と、
前記ベルトの幅方向他端側と当接する第2の当接部材と、
前記ベルトの幅方向他端の所定の破れに伴い前記第1の当接部材が前記第2の当接部材により前記第1の付勢部材に抗して移動するように前記第2の当接部材を前記ベルトの幅方向一端側に向けて付勢する第2の付勢部材と、
を有することを特徴とするベルト搬送装置。
【請求項3】
前記第2の当接部材は前記ベルトの幅方向他端と当接するように設けられており、前記ベルトの幅方向他端に所定の破れが生じていないとき前記第1の当接部材が前記第2の当接部材によって移動することが無いように前記ベルトの幅方向他端が前記第2の当接部材の移動を制限するストッパとして機能することを特徴とする請求項2のベルト搬送装置。
【請求項4】
前記第2の当接部材を前記ベルトの幅方向他端側の表面に押し付けるように付勢する第3の付勢部材と、前記第2の当接部材が前記ベルトの表面に押し付けられているとき前記第1の当接部材が前記第2の当接部材によって移動することが無いように前記第2の当接部材の移動を制限するストッパと、を有することを特徴とする請求項2のベルト搬送装置。
【請求項5】
シートに画像を形成する画像形成手段と、前記画像形成手段によりシートに形成された画像を加熱するときシートを搬送する請求項1乃至4のいずれかのベルト搬送装置と、を有することを特徴とする画像加熱装置。
【請求項6】
請求項1乃至4のいずれかのベルト搬送装置と、前記ベルト搬送装置へシートを供給する供給手段と、前記ベルト搬送装置に担持されたシートに画像を形成する画像形成手段と、を有することを特徴とする画像形成装置。
【請求項7】
請求項1乃至4のいずれかのベルト搬送装置と、前記ベルト搬送装置に画像を形成する画像形成手段と、前記ベルト搬送装置に形成された画像をシートへ転写する転写手段と、を有することを特徴とする画像形成装置。
【請求項1】
エンドレスベルトと、
前記ベルトを回転可能に支持する支持部材と、
前記ベルトの幅方向一端の所定の破れを検出するセンサと、
前記センサを利用して前記ベルトの幅方向他端の所定の破れを検出する検出機構と、
を有することを特徴とするベルト搬送装置。
【請求項2】
エンドレスベルトと、
前記ベルトを回転可能に支持する支持部材と、
前記ベルトの幅方向一端側と当接する第1の当接部材と、
前記第1の当接部材を前記ベルトの幅方向他端側に向けて付勢する第1の付勢部材と、
前記ベルトの幅方向における前記第1の当接部材の位置を検出するセンサと、
前記センサの出力に基づき前記支持部材を変位させる変位機構と、
前記ベルトの幅方向他端側と当接する第2の当接部材と、
前記ベルトの幅方向他端の所定の破れに伴い前記第1の当接部材が前記第2の当接部材により前記第1の付勢部材に抗して移動するように前記第2の当接部材を前記ベルトの幅方向一端側に向けて付勢する第2の付勢部材と、
を有することを特徴とするベルト搬送装置。
【請求項3】
前記第2の当接部材は前記ベルトの幅方向他端と当接するように設けられており、前記ベルトの幅方向他端に所定の破れが生じていないとき前記第1の当接部材が前記第2の当接部材によって移動することが無いように前記ベルトの幅方向他端が前記第2の当接部材の移動を制限するストッパとして機能することを特徴とする請求項2のベルト搬送装置。
【請求項4】
前記第2の当接部材を前記ベルトの幅方向他端側の表面に押し付けるように付勢する第3の付勢部材と、前記第2の当接部材が前記ベルトの表面に押し付けられているとき前記第1の当接部材が前記第2の当接部材によって移動することが無いように前記第2の当接部材の移動を制限するストッパと、を有することを特徴とする請求項2のベルト搬送装置。
【請求項5】
シートに画像を形成する画像形成手段と、前記画像形成手段によりシートに形成された画像を加熱するときシートを搬送する請求項1乃至4のいずれかのベルト搬送装置と、を有することを特徴とする画像加熱装置。
【請求項6】
請求項1乃至4のいずれかのベルト搬送装置と、前記ベルト搬送装置へシートを供給する供給手段と、前記ベルト搬送装置に担持されたシートに画像を形成する画像形成手段と、を有することを特徴とする画像形成装置。
【請求項7】
請求項1乃至4のいずれかのベルト搬送装置と、前記ベルト搬送装置に画像を形成する画像形成手段と、前記ベルト搬送装置に形成された画像をシートへ転写する転写手段と、を有することを特徴とする画像形成装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−33832(P2011−33832A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−179962(P2009−179962)
【出願日】平成21年7月31日(2009.7.31)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年7月31日(2009.7.31)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]