
ベルト蛇行矯正機構
【課題】ベルトの蛇行を容易に矯正してベルトが常に正しい状態で回転駆動されるように制御する簡単な機構のベルト蛇行矯正機構を提供する。
【解決手段】ベルトユニット1においてベルト2は駆動ローラ3と従動部4の5個の円形パイプ5との間に張架される。5個の円形パイプ5はベルト2の半円周面内側に沿って等間隔で並設されベルト2に圧接する。円形パイプ5には円形シャフト6が挿通され、その両端部をベルトフレーム7の側面に位置固定される。円形シャフト6の長手方向中心部の円周上に等間隔で形成された球状の凸部8が円形パイプ5の長手方向中心部の内周面に常に接している。円形パイプ5は円形シャフト6に対し凸部8が接する長手方向中心部を支点として円周全方向にシーソー状に傾動可能である。ベルト2が偏ると円形パイプ5との間でベルト幅方向に摩擦力の差が生じ、ベルト2が摩擦力が高くなったほうへ移動するので偏りが自動的に矯正される。
【解決手段】ベルトユニット1においてベルト2は駆動ローラ3と従動部4の5個の円形パイプ5との間に張架される。5個の円形パイプ5はベルト2の半円周面内側に沿って等間隔で並設されベルト2に圧接する。円形パイプ5には円形シャフト6が挿通され、その両端部をベルトフレーム7の側面に位置固定される。円形シャフト6の長手方向中心部の円周上に等間隔で形成された球状の凸部8が円形パイプ5の長手方向中心部の内周面に常に接している。円形パイプ5は円形シャフト6に対し凸部8が接する長手方向中心部を支点として円周全方向にシーソー状に傾動可能である。ベルト2が偏ると円形パイプ5との間でベルト幅方向に摩擦力の差が生じ、ベルト2が摩擦力が高くなったほうへ移動するので偏りが自動的に矯正される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ベルトが偏心して蛇行しても、その蛇行を容易に矯正して、ベルトが常に正しい状態で回転駆動されるように制御する簡単な機構のベルト蛇行矯正機構に関する。
【背景技術】
【0002】
複数のローラ間に掛け渡されて回転駆動されるベルトは、特に幅が広いベルトになると回転方向と直交する方向に偏心する蛇行が頻発する。ベルトが蛇行すると、ベルトで搬送される搬送物も蛇行するから、この搬送物に何かを加工しようとしても正しく加工できない。
【0003】
このようにベルトが偏心して蛇行することを矯正するために、ベルト駆動ローラの端部に検知リングと転動ピニオンを設け、検知リングによりベルトの偏心が検出されたとき、転動ピニオンを、ベルトの偏りを矯正する方向に転動させる機構が提案されている。(例えば、特許文献1参照。)
また、このほかにも、ベルトの偏りを検知する方法としては、ベルトの位置やベルト駆動ローラ(従動ローラでもよい)に与える摩擦力の差等により、ベルトの偏りを検知するものが知られている。
【0004】
また、ベルトの偏りを矯正するために駆動ローラの軸の偏心させる機構としては、モータ駆動による偏心、ベルトの移動を利用して矯正用ギヤに噛み合わせる方法等、色々な手法が知られている。
【特許文献1】特開2000−272772号公報([要約]、図1)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したような各種の方式は、ベルトのサイズ、材質、張力等により効果に差が出るため、ベルト回りの全体構造に応じて方式を変えたり、ベルト偏りの矯正に係わる各部品の微調整が必要であり、組み立てに手数が掛かるという問題があった。
【0006】
更に、ベルト偏りの検知と、偏心したベルトの矯正には高精度の部品を多く必要とするため、全体的にコストが上昇するという問題もあった。
本発明の課題は、上記従来の実情に鑑み、ベルトの蛇行を容易に矯正してベルトが常に正しい状態で回転駆動されるように制御する簡単な機構のベルト蛇行矯正機構を提供することである。
【課題を解決するための手段】
【0007】
先ず、第1の発明のベルト蛇行矯正機構は、駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、上記従動部のベルトの半円周の曲面内側に沿って複数並設され、両端部をベルトフレームに位置固定された円形シャフトと、該円形シャフトに外嵌し、外周面を上記ベルトの曲面内側に圧接させ、上記円形シャフトに対し長手方向中心部を支点として円周全方向に対しシーソー状に傾動可能な円形パイプと、を備えて構成される。
【0008】
次に、第2の発明のベルト蛇行矯正機構は、駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、上記従動部のベルトの半円周の曲面内側に沿う位置のベルトフレームの両側面に夫々対となって複数形成され、長手方向が上記従動部のベルトの半円周の仮想輻射軸に沿う長孔と、該対の長孔に夫々回転支持軸の両端部を支持され、外周面を上記ベルトの曲面内側に圧接させ、長手方向中心部の外周をベルトフレームの円形状の板状部材に摺接自在に支持され、該支持部を支点に上記回転支持軸の両端部が上記長孔に沿ってシーソー状に傾動可能なコロと、を備えて構成される。
【0009】
更に、第3の発明のベルト蛇行矯正機構は、駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、上記駆動部のベルトの半円周の曲面内側に沿う位置のベルトフレームの両側面に夫々対となって複数形成され、長手方向が上記駆動部のベルトの半円周の仮想輻射軸に沿う長孔と、該対の長孔に夫々回転支持軸の両端部を支持され、外周面を上記ベルトの曲面内側に圧接させ、上記外周面の長手方向中心部にギアを形成され、該ギアを支点に上記回転支持軸の両端部が上記長孔に沿ってシーソー状に傾動可能なローラと、該ローラごとの上記ギアに夫々噛合し、上記各ローラを同時に回転駆動する大径ギアと、を備えて構成される。
【発明の効果】
【0010】
本発明によれば、ベルトの蛇行を容易に矯正してベルトが常に正しい状態で回転駆動されるように制御する簡単な機構のベルト蛇行矯正機構を提供することが可能となる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態を図面を参照しながら説明する。
(実施形態1)
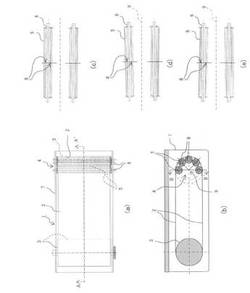
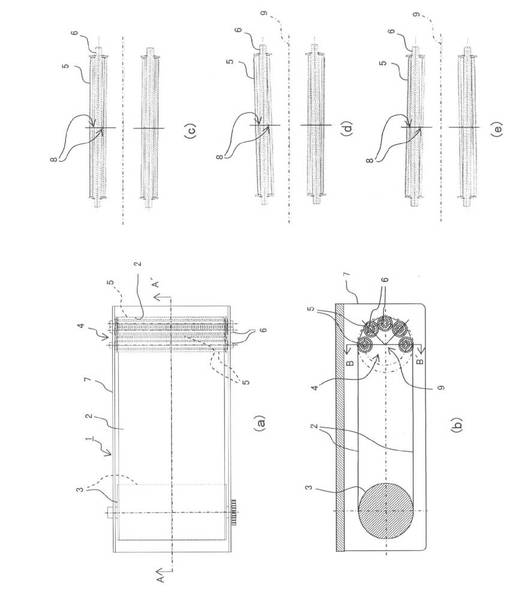
図1(a) は、実施形態1におけるベルト蛇行矯正機構を備えたベルトユニットの平面図であり、同図(b) は、同図(a) のA−A´断面矢視図、同図(c),(d),(e) はそれぞれ同図(b) のB−B´断面矢視図である。
【0012】
本例のベルトユニット1において、ベルト2は、駆動部としての駆動ローラ3と、従動部4を構成する複数(本例では5個)の円形パイプ5との間に張架され、駆動ローラ3によって回転駆動される。
【0013】
従動部4には、従動部4におけるベルト2の半円周の曲面内側に沿って、複数(本例では5個)の円形シャフト6が並設されている。5個の円形シャフト6は、それぞれ両端部をベルトフレーム7の側面に回転可能に位置固定され、それぞれ平行になるように配置されている。
【0014】
上記の円形パイプ5は、それぞれ円形シャフト6に外嵌し、その外周面をベルト2の上記曲面内側に圧接させている。ベルト2の上記曲面内側は、通常の構成であれば駆動ローラ3とほぼ同じ径の従動ローラの外周面に接して半円の回転軌跡を描いて回転すべき内周面である。
【0015】
上記の円形シャフト6の長手方向中心部の円周上には等間隔で球状の凸部8が形成されている。上記円形シャフト6と円形パイプ5との関係は、円形シャフト6の球状の凸部8が円形パイプ5の長手方向中心部の内周面に常に接するように構成されている。
【0016】
尚、この球状の凸部8は、円形シャフト6の長手方向中心部円周上に係合するボールベアリングであってもよい。
この円形シャフト6と円形パイプ5との凸部8を介しての係合関係により、円形パイプ5は、円形シャフト6に対し、凸部8が接する長手方向中心部を支点として、円周全方向に対しシーソー状に傾動可能に構成されている。
【0017】
ベルト2が駆動ローラ3により回転駆動されたとき、ベルト2が回転駆動の定位置(中央)にあるときは、円形パイプ5は、同図(c) に示すように、円形シャフト6と平行した状態で回転し、円形シャフト6の凸部8を支点にして左右の均衡を維持している。
【0018】
しかし、ベルト2が駆動ローラ3により回転駆動されると、ベルト2は、色々な条件下で円形パイプ5との間でベルト幅方向に摩擦力の差が生じる。
そのように、ベルト2と円形パイプ5との間でベルト幅方向に摩擦力の差が生じて、ベルト2が幅方向の左右いずれかに移動すると、ベルト2の移動方向に位置する従動部4の各円形パイプ5の端部は、円形シャフト6の凸部8を支点にして、ベルト2の上記半円の回転軌跡の中心点9に向って傾動する。
【0019】
同図(d) は、ベルト2が同図(d) の左側に寄った場合の円形パイプ5の状態を示している。同図(d) では、円形パイプ5の左側端部は、円形シャフト6の凸部8を支点にして、ベルト2の上記半円の回転軌跡の中心点9に向って傾動している。
【0020】
そして、これとは逆に、べルト2の移動方向とは反対側に位置する各パイプ5の右側端部は、中心点9から離れる方向に傾動する。
このため、ベルト2と各円形パイプ5との間に加わる摩擦力は、中心点9から離れた端部側が高くなる。すなわち、同図(d) において、凸部8の支点から右側の円形パイプ5の円周面とベルト2との間の摩擦力のほうが、凸部8の支点から左側の円形パイプ5の円周面とベルト2との間の摩擦力よりも高くなる。
【0021】
その結果、ベルト2は摩擦力の高い方向、すなわち右側に移動して、同図(c) に示す定位置に戻される。
また、ベルト2が上記とは反対側に偏った、すなわち右側に偏った場合の円形パイプ5の状態を同図(e) に示している。同図(e) では、円形パイプ5の右側端部は、円形シャフト6の凸部8を支点にして、ベルト2の上記半円の回転軌跡の中心点9に向って傾動している。
【0022】
そして、これとは逆に、べルト2の移動方向とは反対側に位置する各パイプ5の左側端部は、中心点9から離れる方向に傾動している。
このため、ベルト2と各円形パイプ5との間に加わる摩擦力は、中心点9から離れた端部側、すなわち、同図(e) において、凸部8の支点から左側の円形パイプ5の円周面とベルト2との間の摩擦力のほうが、凸部8の支点から右側の円形パイプ5の円周面とベルト2との間の摩擦力よりも高くなる。
【0023】
その結果、ベルト2は摩擦力の高い方向、すなわち左側に移動して、この場合も同図(c) に示す定位置に戻される。
このように、本実施形態によれば、従来の従動ローラがあったとした場合のその半円周上に、長手方向中央部を支点にして傾動する複数のパイプを並設するという単純な機構的構造で、ベルトの蛇行の矯正を容易に行うことができるようになる。これにより安価な部品コストおよび製造コストで耐久性と信頼性の高いベルト蛇行矯正機構を提供することが可能となる。
【0024】
(実施形態2)
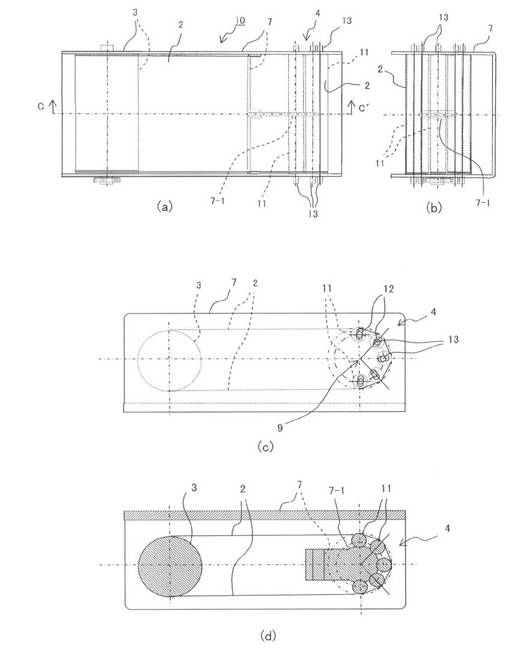
図2(a) は、実施形態2におけるベルト蛇行矯正機構を備えたベルトユニットの平面図であり、同図(b) は同図(a) の右側から見た側面図、同図(c) は同図(a) の手前側から見た側面図、同図(d) は同図(a) のC−C´断面矢視図である。尚、図2において、図1と同一構成又は同一機能の構成部分には図1と同一の番号を付与して示している。
【0025】
本例のベルトユニット10において、ベルト2は、駆動部としての駆動ローラ3と、従動部4を構成する複数(本例では5個)のコロ11との間に張架され、駆動ローラ3によって回転駆動される。
【0026】
コロ11は、通常の構成であれば駆動ローラ3とほぼ同じ径の従動ローラの外周面に接して半円の回転軌跡を描いて回転すべきベルト2の半円周の内面に接して等間隔で配置されている。
【0027】
従動部4には、同図(c) に示すように、従動部4におけるベルト2の上記の半円周に沿う位置の、ベルトフレーム7の両側面(但し図では向う側面は見えない)に、夫々対となって複数(本例では5対)の長孔12が形成されている。
【0028】
各長孔12は、その長手方向が、従動部4のベルト2の上記半円周の中心点9から出る仮想輻射軸に沿って形成されている。
上記のコロ11は、夫々その回転支持軸13の両端部を、対の長孔12に支持されている。これら長孔12の長手方向中心は、コロ12の外周が上記のベルト2の半円の回転軌跡に接したとするときのコロ12の中心と一致するように形成されている。
【0029】
コロ11は、その外周面をベルト2の半円周の曲面内側に圧接させると共に、長手方向中心部の外周を、ベルトフレーム7の円形状の板状部材7−1に摺接自在に支持されている。そして、コロ11は、上記円形状の板状部材7−1による支持部を支点にして、回転支持軸13の両端部が、長孔12に沿ってシーソー状に傾動可能に構成されている。
【0030】
この場合も、実施形態1の場合と同様に、ベルト2が偏って幅方向のいずれかに移動すると、従動部4において、各コロ11のベルト2が移動した方向の端部の軸が、長孔12に沿ってベルト2の上記半円周の中心点9に向って傾動する。
【0031】
そして、実施形態1の場合と同様に、板状部材7−1に支持される中心部よりベルト2が移動したほうのコロ11の周面とベルト2との摩擦力よりも、中心部より反対側のコロ11の周面とベルト2との摩擦力のほうが高くなる。その結果、ベルト2は、摩擦力の高い方向に移動して、定位置に戻される。
【0032】
このように、本実施形態によれば、従来の従動ローラがあったとした場合のその半円周上に、長手方向中央部を支点にして傾動する複数のコロを並設するという単純な機構的構造で、ベルトの蛇行の矯正を容易に行うことができるようになる。これにより安価な部品コストおよび製造コストで耐久性と信頼性の高いベルト蛇行矯正機構を提供することが可能となる。
【0033】
(実施形態3)
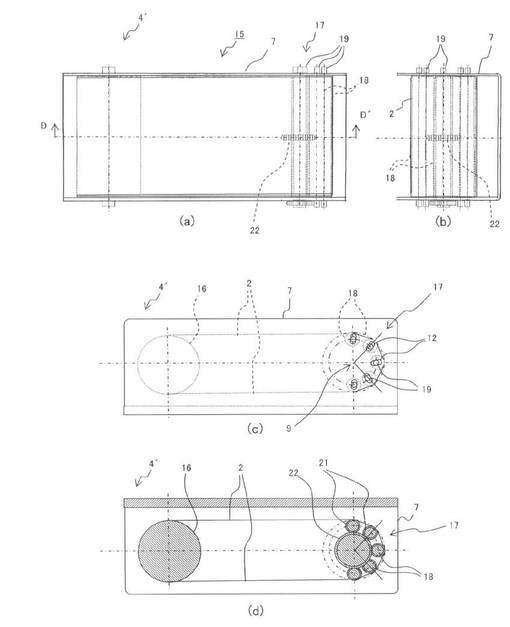
図3(a) は、実施形態3におけるベルト蛇行矯正機構を備えたベルトユニットの平面図であり、同図(b) は同図(a) の右側から見た側面図、同図(c) は同図(a) の手前側から見た側面図、同図(d) は同図(a) のD−D´断面矢視図である。尚、図3において、図1及び図2と同一構成又は同一機能の構成部分には図1及び図2と同一の番号を付与して示している。
【0034】
本例のベルトユニット15において、ベルト2は、従動部4´の従動ローラ16と、駆動部17を構成する複数(本例では5個)の駆動ローラ18に張架され、駆動ローラ18によって回転駆動される。
【0035】
本例の場合、駆動部17におけるローラ18の配置、ローラ18とベルト2との係合面の関係、これらのローラ18の回転支持軸19の両端を支持する長孔12のベルトフレーム7側面における形状及びその配置の状態は、上述した実施形態2における従動部4におけるコロ11の配置、コロ11とベルト2との係合面の関係、これらのコロ11の回転支持軸13の両端を支持する長孔12のベルトフレーム7側面における形状及びその配置の状態と同様である。
【0036】
本例の場合、実施形態2の場合と異なるのは、従動部4´が1個の従動ローラ16で構成され、駆動部17側に上記のように複数のローラ18が配置されていること、及び全てのローラ18の長手方向中央部に、円周全体にわたる歯車21が形成されている点である。
【0037】
また、他方では、ベルトフレーム7には、ベルトフレーム7に軸支され、ベルトフレーム7の不図示の駆動系に回転駆動される1枚のギア22が配設されている。ギア22は、全てのローラ18の歯車21に噛合して、全てのローラ18を回転駆動する。
【0038】
そして、各ローラ18は、ギア22との噛合部を支点として、両端が全円周方向にシーソー状に傾動する。
これにより、実施形態1又は2の場合と同様に、但し従動部と駆動部との違いがあるだけで、ベルト2に偏りが生じると、ベルト2が駆動部17において偏り方向に移動する。ベルト2が偏り方向に移動すると、ローラ18のギア22との噛合部を中心としてローラ18とベルト2との間に、左右における摩擦力の差が生じる。
【0039】
これにより、実施形態1又は2の場合と同様に、ベルト2が摩擦力の高いほうに移動して、偏りが矯正される。
このように、本実施の形態によれば、従来の1個の駆動ローラに代えて複数の駆動ローラを設け、各駆動ローラを長手方向中心部を支点に傾動可能に構成したので、駆動部においても簡単な構成でベルト蛇行の矯正が可能となり、安価な部品コストおよび製造コストで耐久性と信頼性の高いベルト蛇行矯正機構を提供することが可能となる。
【図面の簡単な説明】
【0040】
【図1】(a) は実施形態1におけるベルト蛇行矯正機構を備えたベルトユニットの平面図、(b) は(a) のA−A´断面矢視図、(c),(d),(e) は夫々(b) のB−B´断面矢視図である。
【図2】(a) は実施形態2におけるベルト蛇行矯正機構を備えたベルトユニットの平面図、(b) は(a) の右側の側面図、(c) は(a) の手前側の側面図、(d) は(a) のC−C´断面矢視図である。
【図3】(a) は実施形態3におけるベルト蛇行矯正機構を備えたベルトユニットの平面図、(b) は(a) の右側の側面図、(c) は(a) の手前側の側面図、(d) は(a) のD−D´断面矢視図である。
【符号の説明】
【0041】
1 ベルトユニット
2 ベルト
3 駆動ローラ
4、4´ 従動部
5 円形パイプ
6 円形シャフト
7 ベルトフレーム
7−1 円形状板状部材
8 球状凸部
9 ベルト半円回転軌跡の中心点
10 ベルトユニット
11 コロ
12 長孔
13 回転支持軸
15 ベルトユニット
16 従動ローラ
17 駆動部
18 駆動ローラ
19 回転支持軸
21 歯車
22 ギア
【技術分野】
【0001】
本発明は、ベルトが偏心して蛇行しても、その蛇行を容易に矯正して、ベルトが常に正しい状態で回転駆動されるように制御する簡単な機構のベルト蛇行矯正機構に関する。
【背景技術】
【0002】
複数のローラ間に掛け渡されて回転駆動されるベルトは、特に幅が広いベルトになると回転方向と直交する方向に偏心する蛇行が頻発する。ベルトが蛇行すると、ベルトで搬送される搬送物も蛇行するから、この搬送物に何かを加工しようとしても正しく加工できない。
【0003】
このようにベルトが偏心して蛇行することを矯正するために、ベルト駆動ローラの端部に検知リングと転動ピニオンを設け、検知リングによりベルトの偏心が検出されたとき、転動ピニオンを、ベルトの偏りを矯正する方向に転動させる機構が提案されている。(例えば、特許文献1参照。)
また、このほかにも、ベルトの偏りを検知する方法としては、ベルトの位置やベルト駆動ローラ(従動ローラでもよい)に与える摩擦力の差等により、ベルトの偏りを検知するものが知られている。
【0004】
また、ベルトの偏りを矯正するために駆動ローラの軸の偏心させる機構としては、モータ駆動による偏心、ベルトの移動を利用して矯正用ギヤに噛み合わせる方法等、色々な手法が知られている。
【特許文献1】特開2000−272772号公報([要約]、図1)
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したような各種の方式は、ベルトのサイズ、材質、張力等により効果に差が出るため、ベルト回りの全体構造に応じて方式を変えたり、ベルト偏りの矯正に係わる各部品の微調整が必要であり、組み立てに手数が掛かるという問題があった。
【0006】
更に、ベルト偏りの検知と、偏心したベルトの矯正には高精度の部品を多く必要とするため、全体的にコストが上昇するという問題もあった。
本発明の課題は、上記従来の実情に鑑み、ベルトの蛇行を容易に矯正してベルトが常に正しい状態で回転駆動されるように制御する簡単な機構のベルト蛇行矯正機構を提供することである。
【課題を解決するための手段】
【0007】
先ず、第1の発明のベルト蛇行矯正機構は、駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、上記従動部のベルトの半円周の曲面内側に沿って複数並設され、両端部をベルトフレームに位置固定された円形シャフトと、該円形シャフトに外嵌し、外周面を上記ベルトの曲面内側に圧接させ、上記円形シャフトに対し長手方向中心部を支点として円周全方向に対しシーソー状に傾動可能な円形パイプと、を備えて構成される。
【0008】
次に、第2の発明のベルト蛇行矯正機構は、駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、上記従動部のベルトの半円周の曲面内側に沿う位置のベルトフレームの両側面に夫々対となって複数形成され、長手方向が上記従動部のベルトの半円周の仮想輻射軸に沿う長孔と、該対の長孔に夫々回転支持軸の両端部を支持され、外周面を上記ベルトの曲面内側に圧接させ、長手方向中心部の外周をベルトフレームの円形状の板状部材に摺接自在に支持され、該支持部を支点に上記回転支持軸の両端部が上記長孔に沿ってシーソー状に傾動可能なコロと、を備えて構成される。
【0009】
更に、第3の発明のベルト蛇行矯正機構は、駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、上記駆動部のベルトの半円周の曲面内側に沿う位置のベルトフレームの両側面に夫々対となって複数形成され、長手方向が上記駆動部のベルトの半円周の仮想輻射軸に沿う長孔と、該対の長孔に夫々回転支持軸の両端部を支持され、外周面を上記ベルトの曲面内側に圧接させ、上記外周面の長手方向中心部にギアを形成され、該ギアを支点に上記回転支持軸の両端部が上記長孔に沿ってシーソー状に傾動可能なローラと、該ローラごとの上記ギアに夫々噛合し、上記各ローラを同時に回転駆動する大径ギアと、を備えて構成される。
【発明の効果】
【0010】
本発明によれば、ベルトの蛇行を容易に矯正してベルトが常に正しい状態で回転駆動されるように制御する簡単な機構のベルト蛇行矯正機構を提供することが可能となる。
【発明を実施するための最良の形態】
【0011】
以下、本発明の実施の形態を図面を参照しながら説明する。
(実施形態1)
図1(a) は、実施形態1におけるベルト蛇行矯正機構を備えたベルトユニットの平面図であり、同図(b) は、同図(a) のA−A´断面矢視図、同図(c),(d),(e) はそれぞれ同図(b) のB−B´断面矢視図である。
【0012】
本例のベルトユニット1において、ベルト2は、駆動部としての駆動ローラ3と、従動部4を構成する複数(本例では5個)の円形パイプ5との間に張架され、駆動ローラ3によって回転駆動される。
【0013】
従動部4には、従動部4におけるベルト2の半円周の曲面内側に沿って、複数(本例では5個)の円形シャフト6が並設されている。5個の円形シャフト6は、それぞれ両端部をベルトフレーム7の側面に回転可能に位置固定され、それぞれ平行になるように配置されている。
【0014】
上記の円形パイプ5は、それぞれ円形シャフト6に外嵌し、その外周面をベルト2の上記曲面内側に圧接させている。ベルト2の上記曲面内側は、通常の構成であれば駆動ローラ3とほぼ同じ径の従動ローラの外周面に接して半円の回転軌跡を描いて回転すべき内周面である。
【0015】
上記の円形シャフト6の長手方向中心部の円周上には等間隔で球状の凸部8が形成されている。上記円形シャフト6と円形パイプ5との関係は、円形シャフト6の球状の凸部8が円形パイプ5の長手方向中心部の内周面に常に接するように構成されている。
【0016】
尚、この球状の凸部8は、円形シャフト6の長手方向中心部円周上に係合するボールベアリングであってもよい。
この円形シャフト6と円形パイプ5との凸部8を介しての係合関係により、円形パイプ5は、円形シャフト6に対し、凸部8が接する長手方向中心部を支点として、円周全方向に対しシーソー状に傾動可能に構成されている。
【0017】
ベルト2が駆動ローラ3により回転駆動されたとき、ベルト2が回転駆動の定位置(中央)にあるときは、円形パイプ5は、同図(c) に示すように、円形シャフト6と平行した状態で回転し、円形シャフト6の凸部8を支点にして左右の均衡を維持している。
【0018】
しかし、ベルト2が駆動ローラ3により回転駆動されると、ベルト2は、色々な条件下で円形パイプ5との間でベルト幅方向に摩擦力の差が生じる。
そのように、ベルト2と円形パイプ5との間でベルト幅方向に摩擦力の差が生じて、ベルト2が幅方向の左右いずれかに移動すると、ベルト2の移動方向に位置する従動部4の各円形パイプ5の端部は、円形シャフト6の凸部8を支点にして、ベルト2の上記半円の回転軌跡の中心点9に向って傾動する。
【0019】
同図(d) は、ベルト2が同図(d) の左側に寄った場合の円形パイプ5の状態を示している。同図(d) では、円形パイプ5の左側端部は、円形シャフト6の凸部8を支点にして、ベルト2の上記半円の回転軌跡の中心点9に向って傾動している。
【0020】
そして、これとは逆に、べルト2の移動方向とは反対側に位置する各パイプ5の右側端部は、中心点9から離れる方向に傾動する。
このため、ベルト2と各円形パイプ5との間に加わる摩擦力は、中心点9から離れた端部側が高くなる。すなわち、同図(d) において、凸部8の支点から右側の円形パイプ5の円周面とベルト2との間の摩擦力のほうが、凸部8の支点から左側の円形パイプ5の円周面とベルト2との間の摩擦力よりも高くなる。
【0021】
その結果、ベルト2は摩擦力の高い方向、すなわち右側に移動して、同図(c) に示す定位置に戻される。
また、ベルト2が上記とは反対側に偏った、すなわち右側に偏った場合の円形パイプ5の状態を同図(e) に示している。同図(e) では、円形パイプ5の右側端部は、円形シャフト6の凸部8を支点にして、ベルト2の上記半円の回転軌跡の中心点9に向って傾動している。
【0022】
そして、これとは逆に、べルト2の移動方向とは反対側に位置する各パイプ5の左側端部は、中心点9から離れる方向に傾動している。
このため、ベルト2と各円形パイプ5との間に加わる摩擦力は、中心点9から離れた端部側、すなわち、同図(e) において、凸部8の支点から左側の円形パイプ5の円周面とベルト2との間の摩擦力のほうが、凸部8の支点から右側の円形パイプ5の円周面とベルト2との間の摩擦力よりも高くなる。
【0023】
その結果、ベルト2は摩擦力の高い方向、すなわち左側に移動して、この場合も同図(c) に示す定位置に戻される。
このように、本実施形態によれば、従来の従動ローラがあったとした場合のその半円周上に、長手方向中央部を支点にして傾動する複数のパイプを並設するという単純な機構的構造で、ベルトの蛇行の矯正を容易に行うことができるようになる。これにより安価な部品コストおよび製造コストで耐久性と信頼性の高いベルト蛇行矯正機構を提供することが可能となる。
【0024】
(実施形態2)
図2(a) は、実施形態2におけるベルト蛇行矯正機構を備えたベルトユニットの平面図であり、同図(b) は同図(a) の右側から見た側面図、同図(c) は同図(a) の手前側から見た側面図、同図(d) は同図(a) のC−C´断面矢視図である。尚、図2において、図1と同一構成又は同一機能の構成部分には図1と同一の番号を付与して示している。
【0025】
本例のベルトユニット10において、ベルト2は、駆動部としての駆動ローラ3と、従動部4を構成する複数(本例では5個)のコロ11との間に張架され、駆動ローラ3によって回転駆動される。
【0026】
コロ11は、通常の構成であれば駆動ローラ3とほぼ同じ径の従動ローラの外周面に接して半円の回転軌跡を描いて回転すべきベルト2の半円周の内面に接して等間隔で配置されている。
【0027】
従動部4には、同図(c) に示すように、従動部4におけるベルト2の上記の半円周に沿う位置の、ベルトフレーム7の両側面(但し図では向う側面は見えない)に、夫々対となって複数(本例では5対)の長孔12が形成されている。
【0028】
各長孔12は、その長手方向が、従動部4のベルト2の上記半円周の中心点9から出る仮想輻射軸に沿って形成されている。
上記のコロ11は、夫々その回転支持軸13の両端部を、対の長孔12に支持されている。これら長孔12の長手方向中心は、コロ12の外周が上記のベルト2の半円の回転軌跡に接したとするときのコロ12の中心と一致するように形成されている。
【0029】
コロ11は、その外周面をベルト2の半円周の曲面内側に圧接させると共に、長手方向中心部の外周を、ベルトフレーム7の円形状の板状部材7−1に摺接自在に支持されている。そして、コロ11は、上記円形状の板状部材7−1による支持部を支点にして、回転支持軸13の両端部が、長孔12に沿ってシーソー状に傾動可能に構成されている。
【0030】
この場合も、実施形態1の場合と同様に、ベルト2が偏って幅方向のいずれかに移動すると、従動部4において、各コロ11のベルト2が移動した方向の端部の軸が、長孔12に沿ってベルト2の上記半円周の中心点9に向って傾動する。
【0031】
そして、実施形態1の場合と同様に、板状部材7−1に支持される中心部よりベルト2が移動したほうのコロ11の周面とベルト2との摩擦力よりも、中心部より反対側のコロ11の周面とベルト2との摩擦力のほうが高くなる。その結果、ベルト2は、摩擦力の高い方向に移動して、定位置に戻される。
【0032】
このように、本実施形態によれば、従来の従動ローラがあったとした場合のその半円周上に、長手方向中央部を支点にして傾動する複数のコロを並設するという単純な機構的構造で、ベルトの蛇行の矯正を容易に行うことができるようになる。これにより安価な部品コストおよび製造コストで耐久性と信頼性の高いベルト蛇行矯正機構を提供することが可能となる。
【0033】
(実施形態3)
図3(a) は、実施形態3におけるベルト蛇行矯正機構を備えたベルトユニットの平面図であり、同図(b) は同図(a) の右側から見た側面図、同図(c) は同図(a) の手前側から見た側面図、同図(d) は同図(a) のD−D´断面矢視図である。尚、図3において、図1及び図2と同一構成又は同一機能の構成部分には図1及び図2と同一の番号を付与して示している。
【0034】
本例のベルトユニット15において、ベルト2は、従動部4´の従動ローラ16と、駆動部17を構成する複数(本例では5個)の駆動ローラ18に張架され、駆動ローラ18によって回転駆動される。
【0035】
本例の場合、駆動部17におけるローラ18の配置、ローラ18とベルト2との係合面の関係、これらのローラ18の回転支持軸19の両端を支持する長孔12のベルトフレーム7側面における形状及びその配置の状態は、上述した実施形態2における従動部4におけるコロ11の配置、コロ11とベルト2との係合面の関係、これらのコロ11の回転支持軸13の両端を支持する長孔12のベルトフレーム7側面における形状及びその配置の状態と同様である。
【0036】
本例の場合、実施形態2の場合と異なるのは、従動部4´が1個の従動ローラ16で構成され、駆動部17側に上記のように複数のローラ18が配置されていること、及び全てのローラ18の長手方向中央部に、円周全体にわたる歯車21が形成されている点である。
【0037】
また、他方では、ベルトフレーム7には、ベルトフレーム7に軸支され、ベルトフレーム7の不図示の駆動系に回転駆動される1枚のギア22が配設されている。ギア22は、全てのローラ18の歯車21に噛合して、全てのローラ18を回転駆動する。
【0038】
そして、各ローラ18は、ギア22との噛合部を支点として、両端が全円周方向にシーソー状に傾動する。
これにより、実施形態1又は2の場合と同様に、但し従動部と駆動部との違いがあるだけで、ベルト2に偏りが生じると、ベルト2が駆動部17において偏り方向に移動する。ベルト2が偏り方向に移動すると、ローラ18のギア22との噛合部を中心としてローラ18とベルト2との間に、左右における摩擦力の差が生じる。
【0039】
これにより、実施形態1又は2の場合と同様に、ベルト2が摩擦力の高いほうに移動して、偏りが矯正される。
このように、本実施の形態によれば、従来の1個の駆動ローラに代えて複数の駆動ローラを設け、各駆動ローラを長手方向中心部を支点に傾動可能に構成したので、駆動部においても簡単な構成でベルト蛇行の矯正が可能となり、安価な部品コストおよび製造コストで耐久性と信頼性の高いベルト蛇行矯正機構を提供することが可能となる。
【図面の簡単な説明】
【0040】
【図1】(a) は実施形態1におけるベルト蛇行矯正機構を備えたベルトユニットの平面図、(b) は(a) のA−A´断面矢視図、(c),(d),(e) は夫々(b) のB−B´断面矢視図である。
【図2】(a) は実施形態2におけるベルト蛇行矯正機構を備えたベルトユニットの平面図、(b) は(a) の右側の側面図、(c) は(a) の手前側の側面図、(d) は(a) のC−C´断面矢視図である。
【図3】(a) は実施形態3におけるベルト蛇行矯正機構を備えたベルトユニットの平面図、(b) は(a) の右側の側面図、(c) は(a) の手前側の側面図、(d) は(a) のD−D´断面矢視図である。
【符号の説明】
【0041】
1 ベルトユニット
2 ベルト
3 駆動ローラ
4、4´ 従動部
5 円形パイプ
6 円形シャフト
7 ベルトフレーム
7−1 円形状板状部材
8 球状凸部
9 ベルト半円回転軌跡の中心点
10 ベルトユニット
11 コロ
12 長孔
13 回転支持軸
15 ベルトユニット
16 従動ローラ
17 駆動部
18 駆動ローラ
19 回転支持軸
21 歯車
22 ギア
【特許請求の範囲】
【請求項1】
駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、
前記従動部のベルトの半円周の曲面内側に沿って複数並設され、両端部をベルトフレームに位置固定された円形シャフトと、
該円形シャフトに外嵌し、外周面を前記ベルトの曲面内側に圧接させ、前記円形シャフトに対し長手方向中心部を支点として円周全方向に対しシーソー状に傾動可能な円形パイプと、
を備えたことを特徴とするベルト蛇行矯正機構。
【請求項2】
駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、
前記従動部のベルトの半円周の曲面内側に沿う位置のベルトフレームの両側面に夫々対となって複数形成され、長手方向が前記従動部のベルトの半円周の仮想輻射軸に沿う長孔と、
該対の長孔に夫々回転支持軸の両端部を支持され、外周面を前記ベルトの曲面内側に圧接させ、長手方向中心部の外周をベルトフレームの円形状の板状部材に摺接自在に支持され、該支持部を支点に前記回転支持軸の両端部が前記長孔に沿ってシーソー状に傾動可能なコロと、
を備えたことを特徴とするベルト蛇行矯正機構。
【請求項3】
駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、
前記駆動部のベルトの半円周の曲面内側に沿う位置のベルトフレームの両側面に夫々対となって複数形成され、長手方向が前記駆動部のベルトの半円周の仮想輻射軸に沿う長孔と、
該対の長孔に夫々回転支持軸の両端部を支持され、外周面を前記ベルトの曲面内側に圧接させ、前記外周面の長手方向中心部にギアを形成され、該ギアを支点に前記回転支持軸の両端部が前記長孔に沿ってシーソー状に傾動可能なローラと、
該ローラごとの前記ギアに夫々噛合し、前記各ローラを同時に回転駆動する大径ギアと、
を備えたことを特徴とするベルト蛇行矯正機構。
【請求項1】
駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、
前記従動部のベルトの半円周の曲面内側に沿って複数並設され、両端部をベルトフレームに位置固定された円形シャフトと、
該円形シャフトに外嵌し、外周面を前記ベルトの曲面内側に圧接させ、前記円形シャフトに対し長手方向中心部を支点として円周全方向に対しシーソー状に傾動可能な円形パイプと、
を備えたことを特徴とするベルト蛇行矯正機構。
【請求項2】
駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、
前記従動部のベルトの半円周の曲面内側に沿う位置のベルトフレームの両側面に夫々対となって複数形成され、長手方向が前記従動部のベルトの半円周の仮想輻射軸に沿う長孔と、
該対の長孔に夫々回転支持軸の両端部を支持され、外周面を前記ベルトの曲面内側に圧接させ、長手方向中心部の外周をベルトフレームの円形状の板状部材に摺接自在に支持され、該支持部を支点に前記回転支持軸の両端部が前記長孔に沿ってシーソー状に傾動可能なコロと、
を備えたことを特徴とするベルト蛇行矯正機構。
【請求項3】
駆動部と従動部間に張架されて回転駆動されるベルト蛇行矯正機構であって、
前記駆動部のベルトの半円周の曲面内側に沿う位置のベルトフレームの両側面に夫々対となって複数形成され、長手方向が前記駆動部のベルトの半円周の仮想輻射軸に沿う長孔と、
該対の長孔に夫々回転支持軸の両端部を支持され、外周面を前記ベルトの曲面内側に圧接させ、前記外周面の長手方向中心部にギアを形成され、該ギアを支点に前記回転支持軸の両端部が前記長孔に沿ってシーソー状に傾動可能なローラと、
該ローラごとの前記ギアに夫々噛合し、前記各ローラを同時に回転駆動する大径ギアと、
を備えたことを特徴とするベルト蛇行矯正機構。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2008−50094(P2008−50094A)
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願番号】特願2006−227201(P2006−227201)
【出願日】平成18年8月23日(2006.8.23)
【出願人】(000104124)カシオ電子工業株式会社 (601)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成20年3月6日(2008.3.6)
【国際特許分類】
【出願日】平成18年8月23日(2006.8.23)
【出願人】(000104124)カシオ電子工業株式会社 (601)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]