
ベルト連結器

【課題】円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を多重に巻きつけ、他端側に牽引力を付与するのみで、ベルトの自由端側を巻き付け体に強力に巻き締め固定されるベルト連結器を提供する
【解決手段】円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を多重に巻きつけて連結するベルト連結器において、前記ベルトの少なくとも巻き付け体の周面とこれに巻き付けるベルト自由端部から一巻き目のベルトとの摩擦係数を大きくし、二巻き目からのベルト間の摩擦係数を所定の式を満足する関係の値に小さくしたことを特徴とするベルト連結器。
【解決手段】円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を多重に巻きつけて連結するベルト連結器において、前記ベルトの少なくとも巻き付け体の周面とこれに巻き付けるベルト自由端部から一巻き目のベルトとの摩擦係数を大きくし、二巻き目からのベルト間の摩擦係数を所定の式を満足する関係の値に小さくしたことを特徴とするベルト連結器。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ベルト連結器に関するものである。
【背景技術】
【0002】
一端を操作用の自由端とし、他端部を固定連結した、吊支持用のベルト、牽引用ベルト、締め付け固定用ベルト等の自由端側に設けるベルト連結器は、従来、ベルト自由端側を機械的な止金式保持機構、挟み式保持機構等のように複雑で操作が煩雑で、しかもベルトが早期に損傷し交換を余儀なくされるものが多い。
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を多重に巻きつけ、他端側に牽引力を発生させるのみで、ベルトの自由端側を巻き付け体に強力に巻き締め固定されるベルト連結器を提供することを主目的とするものである。
【課題を解決するための手段】
【0004】
本発明は上記目的を満足するベルト連結器であり、その特徴とするところは、次の(1)〜(4)にある。
【0005】
(1)、円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を重ね巻きして連結するベルト連結器において、
巻き付け体に巻き付くベルトと巻き付け体の周面との摩擦係数μを、重ね巻きベルト同士の摩擦係数μbより大きくし、数1で示す巻き付け体に巻き付いたベルトの前記自由端のベルト張力T4と、ベルトの他端の非巻付側に掛るベルト張力T1との比において、ベルトの上にベルトを巻きつけるベルトの重ね巻き角度θ1を、ベルト張力T4が0となるベルトの重ね巻き角度以上に設定してなることを特徴とするベルト連結器。
【0006】
【数1】

但し、θ3は、巻き付け体の周面に対するベルト一巻き目の実質的巻き付け角度
(2)、前記巻き付け体は、ベルトの自由端から所定長さの巻き付け領域を多重に巻きつけ可能にした円周面を有する回転駆動体とし、この巻き付け体を回転自由に収容する収容部を有しこの該収容部に前記ベルトの他端部を固定連結した回転伝達体とからなることを特徴とする前記(1)に記載のベルト連結器。
(3)、
前記巻き付け体は、ベルトの自由端から所定長さの巻き付け領域を多重に巻きつけ可能にした円周面を有する回転伝達体とし、この巻き付け体を回転自由に収容する収容部を有しこの該収容部に前記ベルトの他端部を固定連結した回転駆動体とからなることを特徴とする前記(1)に記載のベルト連結器。
(4)、前記巻き付け体は、回転してベルトの自由端から所定長さの巻き付け領域を重ねて巻きつけた後その位置で戻り回転を阻止するラチェット機構を具備し、ベルトの他端部を吊り下がり物に接続固定したことを特徴とする前記(1)又は(2)に記載のベルト連結器。
【発明の効果】
【0007】
本発明は、ベルトの自由端から所定長さの巻き付け領域の表と裏の摩擦係数に大きな差を与えて、巻き付け体に複数重ね巻きし、ベルトの他端部を牽引することで円筒に大きな巻き締まり力を発揮して巻き戻されない自己締結のベルト連結器である。
即ち、本発明は巻き付け体にベルトの自由端部側を二重に巻きつけた場合の摩擦力の理論式を導出して,以上の得られた式よりベルトを所定の重ね巻き角θ1以上の二重巻き部を形成することで,ベルトの自由端部側を円筒周面に、完全ロックできる可能性を予測し,実験より完全ロック状態の出現することを確認した.その結果,二重巻き部を形成するベルトの裏と表の摩擦係数を変えることで大きな締結力を発揮する自己締結ベルト付きベルト連結器とその応用機器を開発したものである。
【発明を実施するための最良の形態】
【0008】
1.ベルトの自由端部の表と裏の摩擦係数に大きな差を与えて、前記ベルトを巻き付け体に多重に巻き付けて、ベルトの他端部を牽引することで大きな締結力を発揮する自己締結の基本原理の説明。
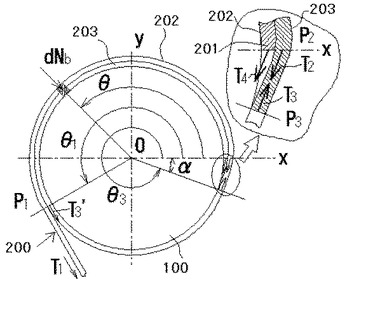
図1に、巻き付け体を円筒100にし、ベルト200の端部(自由端部)201から所定長さの巻き付け領域を円筒100に、重ね巻きした状態を示す.T1はベルトの非巻付側200に掛るベルト張力であり,T4 (T1>T4 )は円筒100の周面に巻き付いたベルトの自由端201に掛るベルト張力であり,実際には内側巻きとなるベルトの自由端201に張力を与えることは難しいため,計算上の仮想張力である.ベルト200はP1〜P2の範囲で重ね巻きされている。点P1,P2,P3は接触境界であり,P1は二重巻き部における外側巻きベルト202の内側巻きベルト203からの離脱点,P2は内側巻きベルト203の端部201の位置,P3はベルト200の一重巻き部における円筒周面との接触境界点である.x軸はP2を通過するようにとる.P2〜P3間はベルト自身の厚さのためにベルトが円筒に接触していない範囲である.
x軸からP1までの角度を重ね巻き角θ1,x軸からP3までの角度つまり巻き付け体の周面に対するベルト一巻き目の実質的巻き付け角をθ3,ベルトと円筒との摩擦係数をμ,ベルト同士の摩擦係数をμbとすると,ベルト張力T1とT4の関係は数1で表される.
【0009】
【数1】
数1は分数の形であり,分母は理論的に0になることはないが,分子は0または負になる可能性がある.分子が0になればT4が0,すなわちベルト張力T1と摩擦力が完全に釣合った状態であることを表し,分子が負であれば,力が釣合うためにはベルト張力T4は圧縮力でなければならないことを表す.しかしながらベルトには圧縮力を加えることはできないので,物理的には完全に摩擦固定された状態にあることを表す.
つぎにベルト200の裏面と円筒100の周面との間の摩擦係数μに対するベルト同士の摩擦係数μbの比を数2のκで定義する.
【0010】
【数2】
数1を使えばベルトの摩擦による完全ロックに必要な条件を調べることができる.
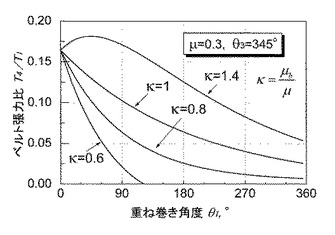
図2に重ね巻き角度θ1とベルト張力比の関係の一例としてμ=0.3,θ3=345°である場合の計算結果を示す.
図2から分かるように,摩擦係数比κが小さくなるほど,重ね巻き角度θ1に対するベルト張力比T4 / T1は小さくなる.すなわちκが小さくなるほど摩擦力は増加して,最終的にはロック状態に至ることが分かる.例えば図2ではκ=0.6 (μ=0.3,μb=0.18) の場合,ベルトの重ね巻き角度θ1を122°以上にすれば完全ロック状態になることを表わしている.以上より,ベルト200と円筒100周面との摩擦係数μは大きくして,ベルト同士の摩擦係数μbはμb<μとすれば,ベルト200の重ね巻きによる摩擦力は強化できることになる.
2.上記理論を得た詳細な理論の説明
<はじめに>
円筒に巻き付けられたベルトやロ−プの摩擦式は,摩擦係数μと巻き付け角θの積の指数関数であることが知られている.教科書で紹介されているベルトの摩擦理論では,ベルトやロ−プが重ね巻きされた場合については考慮されていない.しかしながらベルトやロ−プの巻き上げ装置では,しばしば重ね巻きされることが多い.本研究はベルトを重ね巻きした場合のベルト端部とベルト張力の関係について考察した.
<理 論>
前記の如く、図1は円筒にベルトを巻き付けた状態を示す.T1,T4 (T1>T4 )はベルトの張力であり,T4は円筒に巻き付けられたベルト端部の仮想張力である.ベルトはP1〜P2の範囲で重ね巻きされている.点P1,P2,P3は接触境界であり,P1は外側ベルトの内側ベルトからの離脱点,P2は内側ベルト端部,P3はベルトと円筒との接触境界点である.x軸はP2を通過するようにとる.P2〜P3はベルトが円筒に接触していない範囲である.
ベルトと半径rの円筒間の摩擦係数をμ,ベルト同士の摩擦係数をμbとする.簡単のためベルトの厚さは無視する.ベルトの摩擦の理論より,ベルト張力T1,T2,T3の関係は数3となる。
【0011】
【数3】
数3より数4となる。
【0012】
【数4】
ここでT3’はP1における内側ベルトの張力である.角度θの位置にある外側微小ベルトの法線方向の接触力をdNbとすると,dNbは,数5で与えられる。
【0013】
【数5】
一方,内側ベルト自体の張力差による内側微小ベルトの円筒に対する法線方向の押付け力dN21を数6で表す.
【0014】
【数6】
Pi〜Pj間のベルトによる摩擦力をFijとする.重ね巻きされた内側微小ベルト部は,dNbとdN21との合力で円筒に押し付けられるので,円筒とベルトとの摩擦力F21inは数5,数6より数7となる.
【0015】
【数7】
つぎにモ−メントの釣合について考える.円筒とベルトとの摩擦力およびベルト端張力T4によるモ−メントは,数8のように張力T1によるモ−メントと釣合う.
【0016】
【数8】
ここで数8の右辺第二項である摩擦力F13は,数9である。
【0017】
【数9】
である.数3,数4を利用して,数7のT2と数9のT3’をT1の関数として,それらを数8に代入して整理すると,数10となり、
【0018】
【数10】
となり,数10が重ね巻きしたベルトの摩擦式である.
<考 察>
数10においてμ=0とすると,当然T1=T4となる.一方,数10にμb=0を代入すると,数11となる。
【0019】
【数11】
となる.数11においてμ=0とすると,T1=T4 となり矛盾は生じない.つぎに簡単のため数10にμb=μを代入すると,数12となる。
【0020】
【数12】
数12はベルトの上からベルトを巻き付けた場合も,巻き付け角の合計が摩擦力を大きくするのに有効に活用されることを示している.しかしながら数12から分かるように,μb=μである場合,張力比が無限大となることで,ベルトが円筒に完全にロックされることはなく,理論的にも有限な値となる.
数10あるいは数12において,ベルトの重なり部を消滅させるため,θ1=0とおくと,数13となる。
【0021】
【数13】
数13は良く知られた通常のベルトの摩擦式であり,数10はオイラ−のベルトの摩擦式が含まれるように拡張されていることが分かる.
次にベルトを重ね巻きすることによる,ベルトの完全ロック条件について考察する.すなわち数10の分母が0となることで,T4の係数が無限大になる条件について考える.現実的な摩擦係数の値としてμ=0.2〜0.5,摩擦係数μに対するμbの比を数14のκで定義する.
【0022】
【数14】
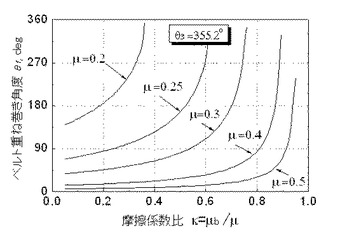
図1に示すように,内側ベルトと円筒との接触角θ3は,ベルトの厚みによる段差のために2π(360°)より僅かに小さくしてθ3=6.2 ラジアン(355.2°)とする.以上の値を用いて数10の分母を0とする数15の条件式,
【0023】
【数15】
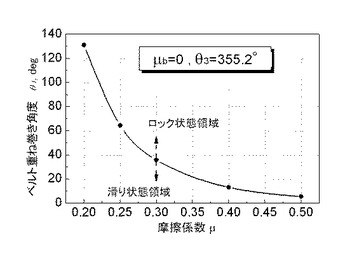
を満足する幾つかのκとθ1を求めた結果が図3である.図3よりたとえばμ=0.3,κ=0.7(μb=0.21)では,θ1=179°であるときに数15の条件が満足されることで数10の右辺の係数は無限大になる.確認のためμ=0.3,κ=0.7(μb=0.21)の条件下で,θ1のみを変えて数10の右辺の係数を試算する.曲線の上側の例としてθ1=90°,下側の例として270°について計算すると,θ1=90°ではT1/T4 =27.2,θ1=270°ではT1/T4 =−131.1となって,曲線より下側(90°側)では円筒とベルトは滑り領域,上側(270°側)ではロック領域であることが分かる.また図3よりκが大きくなるほど完全ロック条件が成立するためには巻き付け角θ1を大きくしなければならないことが分かる.一方,κが小さくなる程巻き付け角θ1を小さくてもロック条件の成立することを図3は示している.このことはベルトと円筒との摩擦係数μに対して,ベルト同士の摩擦係数μbが小さいほどベルトはロックされ易くなることを意味している.その極限であるベルト同士の摩擦係数μb=0である場合のロック条件を数11より計算した結果が図4である.円筒とベルトとの摩擦係数μの増加とともに,ロック条件の成立する臨界角θ1は小さくなることが分かる.
図3,図4ではすべてκ=μb/μ<1であることに注意されたい.κ=1ではロック条件の成立しないことは数12より既に明らかである.κ>1である場合,ロック条件式である数15は,{1−exp(κμθ1)}<0および(1/κ−1)<0であるため数15を満足するθ1は存在しない.そのためκ>1の場合にはロック条件は成立しない.以上のことよりベルトがロックするのに必要な条件はμb/μ=κ<1であることが分かる.
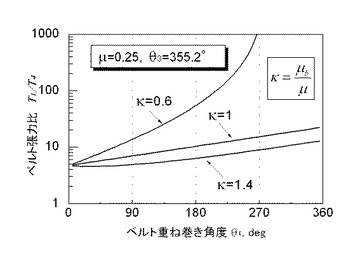
ベルト張力比に及ぼすκの影響を直観的に理解できるように,具体例としてθ3=355.2°,μ=0.25を固定してκ=0.6,1,1.4の3つの場合について数10を計算した結果を図5に示す.κ=0.6ではθ1の増加とともにベルト張力比の急増することが分かる.以上の理論を確認するため,ベルト間にポリエチレンシ−トを挟むことでμbを小さくして実験を行った.その結果,シ−トの無い場合はロックしないが,シ−トを挟むことでベルトが円筒にロックされることを確認した.
<まとめ>
オイラ−の解析したベルトの摩擦式を拡張して円筒にベルトを重ね巻きした場合の摩擦式を導出した.重ね巻きによりベルトが円筒にロックされる条件は,ベルトと円筒との摩擦係数をμ,ベルト同士の摩擦係数をμbとした場合,μb/μ<1である.
3.具体例の説明
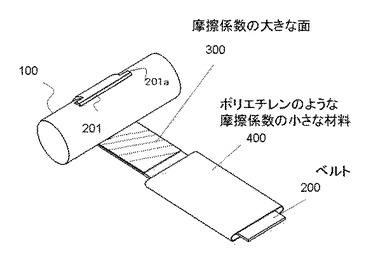
具体例として図6のように円筒100の周面と接触するベルト200の部位には摩擦係数を大きくするために,ベルト200にゴム膜300のような材質を塗布し,重ね巻き領域になるベルト同士が接触する部位にはポリエチレンのように摩擦係数の小さな材質のチュ−ブ400にベルトを通せば,任意の径の円筒にも利用できる.単に巻きつけて非巻き付け側の他端側を引っ張るだけで、ベルトは自己締結作用が生じ円筒100の周面を強力に締め付け,ベルトは円筒を摩擦固定することができる.ベルトの巻き付け部の先端には、指先などで円筒100の周面に一時的に押さえるために,通常のベルト幅より幅の広い耳部201aを設けることで、最初の一巻の巻付つけを容易に行うことができる。ベルト200を円筒100の周面に面接触状態のみで摩擦固定するには、ベルト200の自由端から所定長さの巻き付け領域で、少なくとも二重巻き領域部が前記数1で求めた二重巻き角θ1が形成されるように巻きつけて,ベルト200の他端部側を引張るだけでその引っ張り力に相当して強力に締め付け固定される,ボルトや接着剤を使わないので取り付け取り外しは、ベルト200の非巻き付け側の他端部側を緩めるのみで簡単になされる.本例は円筒100に巻き付けるベルト200側に摩擦係数を大きくするためのゴム膜300を塗布した例であったが,逆に摩擦係数が大きくなるような材質を円筒側に適用することでも同じ効果を得ることができる.
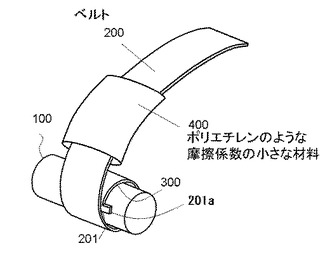
図7はベルト200の自由端側を巻きつけようとしている様子を表わしている.重ね巻き領域になるベルト同士の摩擦力を小さくするため,チュ−ブ400の位置は,少なくとも必要な前記二重巻き角θ1の大きさに合わせた領域にスライドさせて利用する.
ベルト200を円筒100の外周面に巻き付ける際は,ベルト200の自由端を挿入する溝を円筒100側に設けることでベルト200を円筒100に巻きつける作業は非常に容易に行えるようになる.またクリップ等によるベルト押さえを円筒100側につけてもベルト200の巻き付け作業は非常に容易になる.
【0024】
4.以下に本発明のベルト連結器の応用例を紹介する。
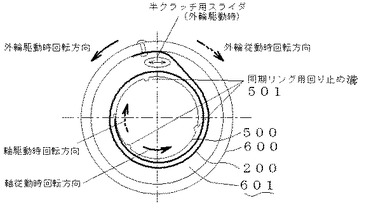
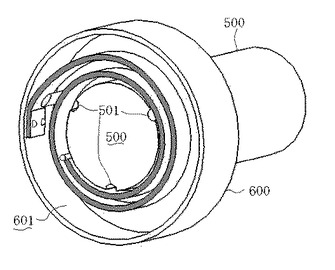
図8はブレ−キやクラッチのように、回転トルクを制御するトルク伝達機構に応用したベルト連結器の正面図である。ベルト200は、軸500の周面と接触するベルト200の部位には摩擦係数を大きくするためゴム膜のようなものをコーティングし,重ね巻き領域になるベルト同士が接触する部位には摩擦係数の小さなポリエチレン膜をコーティングしてある。またベルト200は、その一端を外側リング600に固定されている。ベルト200は摩擦力などの外力が作用しない状態では、巻かれた状態から直線状態に復帰しようとする弱い弾性回復力を持たせている。弾性回復力のために無負荷状態ではベルト200は外側リング600の内側の収容部601に収容された状態にある。図8のようにベルト200が巻かれた状態では、外側リング600を回転伝達体とし内部の軸500を回転駆動軸(以下単に軸称する)とする場合は,時計回りのトルクを外側リング600に伝えることが可能である。ベルト200を軸500に巻きつけるには、ベルト200の自由端201にあるトリガ−ピン250を軸500と一緒に回転する同期リング700と接触させることで、ベルト200の自由端201は軸500と同じように回転しようとする。ところがベルト200の一端は外側リング600に固定されているため、ベルト200は軸500に巻き付いて、巻き付きに伴う自己締結力のために軸500と外側リング600とはベルト連結器により完全に連結される。外側リング600が回転する場合は、ベルト連結器はトルクの伝達・切断を行うクラッチとして働き、外側リング600を固定している場合はブレ−キとなる。なお外側リング600はベルト200を固定する部位の強度が十分であれば、それ以外の場所についてはベルト200が伸展しないように、その内側にベルト200を収容できる収容部601の形状であれば良い。外側リング600の回転速度が内側の軸500の回転速度より早くなると、自己締結力は消滅してクラッチは自動的に切断される。
つぎに,外側リング600を回転駆動体とし軸500を回転伝達体とする場合は、外側リング600の反時計回りのトルクを内部の軸500に伝えることができる。ベルト200を軸500に巻き付かせるには、回転中のベルト200の自由端201にあるトリガ−ピン250を、軸500上の同期リング700と接触させることで、ベルト200の自由端は軸500と同じように回転しようとする。ところがベルトの一端は外側リング600に固定しているため、ベルトは軸500に巻き付いて外側リング600と軸500とはベルト連結器により完全に連結される。軸500が回転可能な場合は、ベルト連結器はトルクの伝達・切断を行うクラッチとして働き、軸500を固定した場合はベルト連結器はブレ−キになる。外側リング600が回転駆動体の場合、外側リング600の回転速度が内側の軸の回転速度より遅くなれば、自己締結力が消滅してクラッチは自動的に切断される。また外側リング600が回転駆動体の場合、外側リング600の内側に軸500を中心として回動するスライダを利用すれば、半クラッチ状態を実現できる。外側リング600と一緒に自由に回転しているスライダにブレ−キトルクを与えると、スライダは軸500に巻き付いているベルト側に移動して、重ね巻きされたベルトの一部を押し上げることでベルト200の巻き付け角は減少する。ベルト200の巻き付け角が小さくなれば摩擦力は減少して、ベルト連結器は完全ロック状態から滑り状態に移行して半クラッチ状態となる。スライダに与えていたブレ−キトルクを解除すると、ベルトがその張力でスライダを押し戻すために巻き付け角は回復して再び完全ロック状態になる。
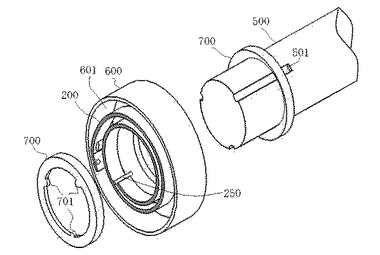
図9は、図8を分かり易いように、同期リング700を省略した斜視図である。同期リング700は、軸500のベルト巻き付け領域の両側に位置し、軸方向移動のみ可能に嵌めて軸500と共に回転している。ベルト200を軸500に巻き付かせたい時に、ベルト自由端にあるトリガ−ピン250に同期リング700を滑り接触させることで、ベルト200はトリガ−ピン250に引かれて軸500に巻き付き始め、巻き付き角度の増加ととも摩擦力は増大して、ベルト200と軸500は完全に摩擦固定される。図10はベルト連結器の主要部を分かり易くした構成図であり、同期リング700も描いている。同期リング700を軸方向にスライドさせるには、U字型のホ−クやスラスト軸受など、既存のクラッチやマニュアル式の変速機で使われている方法を利用すれば良い。なお同期リング700が軸500と同じように回転するため、図8,図9,図10では同期リング700の内周部にロック用の突起701を設け、軸500の外周面部には、突起701と嵌め合わせるため、3箇所に回り止めの溝501を付けている。
ベルトと接触する軸500の周面を滑らかにするためには、前とは逆に、同期リング700側に回り止めの溝加工を行い、ベルトと接触する軸500の周面領域の外側に該溝に嵌る凸部となるパ−ツを軸500に取り付けるようにしても良い。
【0025】
他の応用例は、図示していないが、ハンモック吊機構として応用した例である。ハンモック吊機構に用いるベルト連結器は、巻き付け体としてラチェット式回転体を設け、このラチェット式回転体を回転させて、ベルトの自由端から所定長さの巻き付け領域を重ねて巻きつけた後、その位置で戻り回転を阻止するラチェット機構を具備し、ベルトの他端部をハンモックの両側の各々に接続固定して吊り下げたものである。
ラチェット式回転体の周面と接触するベルトの部位には摩擦係数の大きいゴム膜をコーティングし,重ね巻き領域になるベルト同士が接触する部位には摩擦係数の小さいポリエチレン膜をコーティングしてある。この機構により、ラチェット式回転体を所定数回転させてベルトの自由端側のゴム膜コーティング領域を周面に巻き付かせて、続いてポリエチレン膜コーティング領域を重ね巻きして後、ラチェット機構で巻き戻りをロックしておくことにより、ベルトの他端部に掛るハンモック荷重により、ゴム膜コーティング領域が、ラチェット式回転体周面に締め付け固定され、ハンモックを吊り支持する。これに人が乗ればより強固に締め付け固定され、落下することは無い。この例はトランポリンなどの吊支持用のベルト連結器としても応用可能である。
【産業上の利用可能性】
【0026】
本発明のベルト連結器は、一端を操作用の自由端とし、他端部を固定連結した、吊支持用のベルト、牽引用ベルト、締め付け固定用ベルト等の自由端側に設けるベルト連結器であり、前述の応用例で紹介したように、産業上の幅広い用途が可能である。
【図面の簡単な説明】
【0027】
【図1】本発明基本原理を説明するための図面であり、円筒に重ね巻きされたベルトの状態例を示す断面説明図である。
【図2】重ね巻き角度θ1とベルト張力比の関係の一例としてμ=0.3,θ3=345°である場合の計算結果を示す.
【図3】θ3=355.2°である場合について、数15の条件式を満足する幾つかのκとθ1を求めた計算結果を、摩擦係数μをパラメ−タとして表したグラフ。
【図4】極限であるベルト同士の摩擦係数μb=0である場合のロック条件を、数11より計算した結果の例をθ1とμとの関係で示すグラフ。
【図5】μ=0.25、θ3=355.2°である場合に、κ=μb/μ=0.6,1,1.4として数10を計算した結果の例を、T1 /T4とθ1との関係で示すグラフ。
【図6】自己締結型のベルト連結器例を示す斜視説明図である。
【図7】自己締結型のベルト連結器にベルトを巻きつけている様子を示す斜視説明図である。
【図8】回転トルクを制御するトルク伝達機構に応用したベルト連結器を示す。
【図9】図8に示すベルト連結器の斜視図である。
【図10】図9に示すベルト連結器の分解構成図である。
【符号の説明】
【0028】
100 円筒(巻き付け体)
200 ベルト
201 ベルト自由端部
300 ベルト表面のゴム膜
400 ベルト同士の摩擦係数を小さくするための摩擦係数の小さなチュ−ブ
【技術分野】
【0001】
本発明は、ベルト連結器に関するものである。
【背景技術】
【0002】
一端を操作用の自由端とし、他端部を固定連結した、吊支持用のベルト、牽引用ベルト、締め付け固定用ベルト等の自由端側に設けるベルト連結器は、従来、ベルト自由端側を機械的な止金式保持機構、挟み式保持機構等のように複雑で操作が煩雑で、しかもベルトが早期に損傷し交換を余儀なくされるものが多い。
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明は、円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を多重に巻きつけ、他端側に牽引力を発生させるのみで、ベルトの自由端側を巻き付け体に強力に巻き締め固定されるベルト連結器を提供することを主目的とするものである。
【課題を解決するための手段】
【0004】
本発明は上記目的を満足するベルト連結器であり、その特徴とするところは、次の(1)〜(4)にある。
【0005】
(1)、円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を重ね巻きして連結するベルト連結器において、
巻き付け体に巻き付くベルトと巻き付け体の周面との摩擦係数μを、重ね巻きベルト同士の摩擦係数μbより大きくし、数1で示す巻き付け体に巻き付いたベルトの前記自由端のベルト張力T4と、ベルトの他端の非巻付側に掛るベルト張力T1との比において、ベルトの上にベルトを巻きつけるベルトの重ね巻き角度θ1を、ベルト張力T4が0となるベルトの重ね巻き角度以上に設定してなることを特徴とするベルト連結器。
【0006】
【数1】
但し、θ3は、巻き付け体の周面に対するベルト一巻き目の実質的巻き付け角度
(2)、前記巻き付け体は、ベルトの自由端から所定長さの巻き付け領域を多重に巻きつけ可能にした円周面を有する回転駆動体とし、この巻き付け体を回転自由に収容する収容部を有しこの該収容部に前記ベルトの他端部を固定連結した回転伝達体とからなることを特徴とする前記(1)に記載のベルト連結器。
(3)、
前記巻き付け体は、ベルトの自由端から所定長さの巻き付け領域を多重に巻きつけ可能にした円周面を有する回転伝達体とし、この巻き付け体を回転自由に収容する収容部を有しこの該収容部に前記ベルトの他端部を固定連結した回転駆動体とからなることを特徴とする前記(1)に記載のベルト連結器。
(4)、前記巻き付け体は、回転してベルトの自由端から所定長さの巻き付け領域を重ねて巻きつけた後その位置で戻り回転を阻止するラチェット機構を具備し、ベルトの他端部を吊り下がり物に接続固定したことを特徴とする前記(1)又は(2)に記載のベルト連結器。
【発明の効果】
【0007】
本発明は、ベルトの自由端から所定長さの巻き付け領域の表と裏の摩擦係数に大きな差を与えて、巻き付け体に複数重ね巻きし、ベルトの他端部を牽引することで円筒に大きな巻き締まり力を発揮して巻き戻されない自己締結のベルト連結器である。
即ち、本発明は巻き付け体にベルトの自由端部側を二重に巻きつけた場合の摩擦力の理論式を導出して,以上の得られた式よりベルトを所定の重ね巻き角θ1以上の二重巻き部を形成することで,ベルトの自由端部側を円筒周面に、完全ロックできる可能性を予測し,実験より完全ロック状態の出現することを確認した.その結果,二重巻き部を形成するベルトの裏と表の摩擦係数を変えることで大きな締結力を発揮する自己締結ベルト付きベルト連結器とその応用機器を開発したものである。
【発明を実施するための最良の形態】
【0008】
1.ベルトの自由端部の表と裏の摩擦係数に大きな差を与えて、前記ベルトを巻き付け体に多重に巻き付けて、ベルトの他端部を牽引することで大きな締結力を発揮する自己締結の基本原理の説明。
図1に、巻き付け体を円筒100にし、ベルト200の端部(自由端部)201から所定長さの巻き付け領域を円筒100に、重ね巻きした状態を示す.T1はベルトの非巻付側200に掛るベルト張力であり,T4 (T1>T4 )は円筒100の周面に巻き付いたベルトの自由端201に掛るベルト張力であり,実際には内側巻きとなるベルトの自由端201に張力を与えることは難しいため,計算上の仮想張力である.ベルト200はP1〜P2の範囲で重ね巻きされている。点P1,P2,P3は接触境界であり,P1は二重巻き部における外側巻きベルト202の内側巻きベルト203からの離脱点,P2は内側巻きベルト203の端部201の位置,P3はベルト200の一重巻き部における円筒周面との接触境界点である.x軸はP2を通過するようにとる.P2〜P3間はベルト自身の厚さのためにベルトが円筒に接触していない範囲である.
x軸からP1までの角度を重ね巻き角θ1,x軸からP3までの角度つまり巻き付け体の周面に対するベルト一巻き目の実質的巻き付け角をθ3,ベルトと円筒との摩擦係数をμ,ベルト同士の摩擦係数をμbとすると,ベルト張力T1とT4の関係は数1で表される.
【0009】
【数1】
数1は分数の形であり,分母は理論的に0になることはないが,分子は0または負になる可能性がある.分子が0になればT4が0,すなわちベルト張力T1と摩擦力が完全に釣合った状態であることを表し,分子が負であれば,力が釣合うためにはベルト張力T4は圧縮力でなければならないことを表す.しかしながらベルトには圧縮力を加えることはできないので,物理的には完全に摩擦固定された状態にあることを表す.
つぎにベルト200の裏面と円筒100の周面との間の摩擦係数μに対するベルト同士の摩擦係数μbの比を数2のκで定義する.
【0010】
【数2】
数1を使えばベルトの摩擦による完全ロックに必要な条件を調べることができる.
図2に重ね巻き角度θ1とベルト張力比の関係の一例としてμ=0.3,θ3=345°である場合の計算結果を示す.
図2から分かるように,摩擦係数比κが小さくなるほど,重ね巻き角度θ1に対するベルト張力比T4 / T1は小さくなる.すなわちκが小さくなるほど摩擦力は増加して,最終的にはロック状態に至ることが分かる.例えば図2ではκ=0.6 (μ=0.3,μb=0.18) の場合,ベルトの重ね巻き角度θ1を122°以上にすれば完全ロック状態になることを表わしている.以上より,ベルト200と円筒100周面との摩擦係数μは大きくして,ベルト同士の摩擦係数μbはμb<μとすれば,ベルト200の重ね巻きによる摩擦力は強化できることになる.
2.上記理論を得た詳細な理論の説明
<はじめに>
円筒に巻き付けられたベルトやロ−プの摩擦式は,摩擦係数μと巻き付け角θの積の指数関数であることが知られている.教科書で紹介されているベルトの摩擦理論では,ベルトやロ−プが重ね巻きされた場合については考慮されていない.しかしながらベルトやロ−プの巻き上げ装置では,しばしば重ね巻きされることが多い.本研究はベルトを重ね巻きした場合のベルト端部とベルト張力の関係について考察した.
<理 論>
前記の如く、図1は円筒にベルトを巻き付けた状態を示す.T1,T4 (T1>T4 )はベルトの張力であり,T4は円筒に巻き付けられたベルト端部の仮想張力である.ベルトはP1〜P2の範囲で重ね巻きされている.点P1,P2,P3は接触境界であり,P1は外側ベルトの内側ベルトからの離脱点,P2は内側ベルト端部,P3はベルトと円筒との接触境界点である.x軸はP2を通過するようにとる.P2〜P3はベルトが円筒に接触していない範囲である.
ベルトと半径rの円筒間の摩擦係数をμ,ベルト同士の摩擦係数をμbとする.簡単のためベルトの厚さは無視する.ベルトの摩擦の理論より,ベルト張力T1,T2,T3の関係は数3となる。
【0011】
【数3】
数3より数4となる。
【0012】
【数4】
ここでT3’はP1における内側ベルトの張力である.角度θの位置にある外側微小ベルトの法線方向の接触力をdNbとすると,dNbは,数5で与えられる。
【0013】
【数5】
一方,内側ベルト自体の張力差による内側微小ベルトの円筒に対する法線方向の押付け力dN21を数6で表す.
【0014】
【数6】
Pi〜Pj間のベルトによる摩擦力をFijとする.重ね巻きされた内側微小ベルト部は,dNbとdN21との合力で円筒に押し付けられるので,円筒とベルトとの摩擦力F21inは数5,数6より数7となる.
【0015】
【数7】
つぎにモ−メントの釣合について考える.円筒とベルトとの摩擦力およびベルト端張力T4によるモ−メントは,数8のように張力T1によるモ−メントと釣合う.
【0016】
【数8】
ここで数8の右辺第二項である摩擦力F13は,数9である。
【0017】
【数9】
である.数3,数4を利用して,数7のT2と数9のT3’をT1の関数として,それらを数8に代入して整理すると,数10となり、
【0018】
【数10】
となり,数10が重ね巻きしたベルトの摩擦式である.
<考 察>
数10においてμ=0とすると,当然T1=T4となる.一方,数10にμb=0を代入すると,数11となる。
【0019】
【数11】
となる.数11においてμ=0とすると,T1=T4 となり矛盾は生じない.つぎに簡単のため数10にμb=μを代入すると,数12となる。
【0020】
【数12】
数12はベルトの上からベルトを巻き付けた場合も,巻き付け角の合計が摩擦力を大きくするのに有効に活用されることを示している.しかしながら数12から分かるように,μb=μである場合,張力比が無限大となることで,ベルトが円筒に完全にロックされることはなく,理論的にも有限な値となる.
数10あるいは数12において,ベルトの重なり部を消滅させるため,θ1=0とおくと,数13となる。
【0021】
【数13】
数13は良く知られた通常のベルトの摩擦式であり,数10はオイラ−のベルトの摩擦式が含まれるように拡張されていることが分かる.
次にベルトを重ね巻きすることによる,ベルトの完全ロック条件について考察する.すなわち数10の分母が0となることで,T4の係数が無限大になる条件について考える.現実的な摩擦係数の値としてμ=0.2〜0.5,摩擦係数μに対するμbの比を数14のκで定義する.
【0022】
【数14】
図1に示すように,内側ベルトと円筒との接触角θ3は,ベルトの厚みによる段差のために2π(360°)より僅かに小さくしてθ3=6.2 ラジアン(355.2°)とする.以上の値を用いて数10の分母を0とする数15の条件式,
【0023】
【数15】
を満足する幾つかのκとθ1を求めた結果が図3である.図3よりたとえばμ=0.3,κ=0.7(μb=0.21)では,θ1=179°であるときに数15の条件が満足されることで数10の右辺の係数は無限大になる.確認のためμ=0.3,κ=0.7(μb=0.21)の条件下で,θ1のみを変えて数10の右辺の係数を試算する.曲線の上側の例としてθ1=90°,下側の例として270°について計算すると,θ1=90°ではT1/T4 =27.2,θ1=270°ではT1/T4 =−131.1となって,曲線より下側(90°側)では円筒とベルトは滑り領域,上側(270°側)ではロック領域であることが分かる.また図3よりκが大きくなるほど完全ロック条件が成立するためには巻き付け角θ1を大きくしなければならないことが分かる.一方,κが小さくなる程巻き付け角θ1を小さくてもロック条件の成立することを図3は示している.このことはベルトと円筒との摩擦係数μに対して,ベルト同士の摩擦係数μbが小さいほどベルトはロックされ易くなることを意味している.その極限であるベルト同士の摩擦係数μb=0である場合のロック条件を数11より計算した結果が図4である.円筒とベルトとの摩擦係数μの増加とともに,ロック条件の成立する臨界角θ1は小さくなることが分かる.
図3,図4ではすべてκ=μb/μ<1であることに注意されたい.κ=1ではロック条件の成立しないことは数12より既に明らかである.κ>1である場合,ロック条件式である数15は,{1−exp(κμθ1)}<0および(1/κ−1)<0であるため数15を満足するθ1は存在しない.そのためκ>1の場合にはロック条件は成立しない.以上のことよりベルトがロックするのに必要な条件はμb/μ=κ<1であることが分かる.
ベルト張力比に及ぼすκの影響を直観的に理解できるように,具体例としてθ3=355.2°,μ=0.25を固定してκ=0.6,1,1.4の3つの場合について数10を計算した結果を図5に示す.κ=0.6ではθ1の増加とともにベルト張力比の急増することが分かる.以上の理論を確認するため,ベルト間にポリエチレンシ−トを挟むことでμbを小さくして実験を行った.その結果,シ−トの無い場合はロックしないが,シ−トを挟むことでベルトが円筒にロックされることを確認した.
<まとめ>
オイラ−の解析したベルトの摩擦式を拡張して円筒にベルトを重ね巻きした場合の摩擦式を導出した.重ね巻きによりベルトが円筒にロックされる条件は,ベルトと円筒との摩擦係数をμ,ベルト同士の摩擦係数をμbとした場合,μb/μ<1である.
3.具体例の説明
具体例として図6のように円筒100の周面と接触するベルト200の部位には摩擦係数を大きくするために,ベルト200にゴム膜300のような材質を塗布し,重ね巻き領域になるベルト同士が接触する部位にはポリエチレンのように摩擦係数の小さな材質のチュ−ブ400にベルトを通せば,任意の径の円筒にも利用できる.単に巻きつけて非巻き付け側の他端側を引っ張るだけで、ベルトは自己締結作用が生じ円筒100の周面を強力に締め付け,ベルトは円筒を摩擦固定することができる.ベルトの巻き付け部の先端には、指先などで円筒100の周面に一時的に押さえるために,通常のベルト幅より幅の広い耳部201aを設けることで、最初の一巻の巻付つけを容易に行うことができる。ベルト200を円筒100の周面に面接触状態のみで摩擦固定するには、ベルト200の自由端から所定長さの巻き付け領域で、少なくとも二重巻き領域部が前記数1で求めた二重巻き角θ1が形成されるように巻きつけて,ベルト200の他端部側を引張るだけでその引っ張り力に相当して強力に締め付け固定される,ボルトや接着剤を使わないので取り付け取り外しは、ベルト200の非巻き付け側の他端部側を緩めるのみで簡単になされる.本例は円筒100に巻き付けるベルト200側に摩擦係数を大きくするためのゴム膜300を塗布した例であったが,逆に摩擦係数が大きくなるような材質を円筒側に適用することでも同じ効果を得ることができる.
図7はベルト200の自由端側を巻きつけようとしている様子を表わしている.重ね巻き領域になるベルト同士の摩擦力を小さくするため,チュ−ブ400の位置は,少なくとも必要な前記二重巻き角θ1の大きさに合わせた領域にスライドさせて利用する.
ベルト200を円筒100の外周面に巻き付ける際は,ベルト200の自由端を挿入する溝を円筒100側に設けることでベルト200を円筒100に巻きつける作業は非常に容易に行えるようになる.またクリップ等によるベルト押さえを円筒100側につけてもベルト200の巻き付け作業は非常に容易になる.
【0024】
4.以下に本発明のベルト連結器の応用例を紹介する。
図8はブレ−キやクラッチのように、回転トルクを制御するトルク伝達機構に応用したベルト連結器の正面図である。ベルト200は、軸500の周面と接触するベルト200の部位には摩擦係数を大きくするためゴム膜のようなものをコーティングし,重ね巻き領域になるベルト同士が接触する部位には摩擦係数の小さなポリエチレン膜をコーティングしてある。またベルト200は、その一端を外側リング600に固定されている。ベルト200は摩擦力などの外力が作用しない状態では、巻かれた状態から直線状態に復帰しようとする弱い弾性回復力を持たせている。弾性回復力のために無負荷状態ではベルト200は外側リング600の内側の収容部601に収容された状態にある。図8のようにベルト200が巻かれた状態では、外側リング600を回転伝達体とし内部の軸500を回転駆動軸(以下単に軸称する)とする場合は,時計回りのトルクを外側リング600に伝えることが可能である。ベルト200を軸500に巻きつけるには、ベルト200の自由端201にあるトリガ−ピン250を軸500と一緒に回転する同期リング700と接触させることで、ベルト200の自由端201は軸500と同じように回転しようとする。ところがベルト200の一端は外側リング600に固定されているため、ベルト200は軸500に巻き付いて、巻き付きに伴う自己締結力のために軸500と外側リング600とはベルト連結器により完全に連結される。外側リング600が回転する場合は、ベルト連結器はトルクの伝達・切断を行うクラッチとして働き、外側リング600を固定している場合はブレ−キとなる。なお外側リング600はベルト200を固定する部位の強度が十分であれば、それ以外の場所についてはベルト200が伸展しないように、その内側にベルト200を収容できる収容部601の形状であれば良い。外側リング600の回転速度が内側の軸500の回転速度より早くなると、自己締結力は消滅してクラッチは自動的に切断される。
つぎに,外側リング600を回転駆動体とし軸500を回転伝達体とする場合は、外側リング600の反時計回りのトルクを内部の軸500に伝えることができる。ベルト200を軸500に巻き付かせるには、回転中のベルト200の自由端201にあるトリガ−ピン250を、軸500上の同期リング700と接触させることで、ベルト200の自由端は軸500と同じように回転しようとする。ところがベルトの一端は外側リング600に固定しているため、ベルトは軸500に巻き付いて外側リング600と軸500とはベルト連結器により完全に連結される。軸500が回転可能な場合は、ベルト連結器はトルクの伝達・切断を行うクラッチとして働き、軸500を固定した場合はベルト連結器はブレ−キになる。外側リング600が回転駆動体の場合、外側リング600の回転速度が内側の軸の回転速度より遅くなれば、自己締結力が消滅してクラッチは自動的に切断される。また外側リング600が回転駆動体の場合、外側リング600の内側に軸500を中心として回動するスライダを利用すれば、半クラッチ状態を実現できる。外側リング600と一緒に自由に回転しているスライダにブレ−キトルクを与えると、スライダは軸500に巻き付いているベルト側に移動して、重ね巻きされたベルトの一部を押し上げることでベルト200の巻き付け角は減少する。ベルト200の巻き付け角が小さくなれば摩擦力は減少して、ベルト連結器は完全ロック状態から滑り状態に移行して半クラッチ状態となる。スライダに与えていたブレ−キトルクを解除すると、ベルトがその張力でスライダを押し戻すために巻き付け角は回復して再び完全ロック状態になる。
図9は、図8を分かり易いように、同期リング700を省略した斜視図である。同期リング700は、軸500のベルト巻き付け領域の両側に位置し、軸方向移動のみ可能に嵌めて軸500と共に回転している。ベルト200を軸500に巻き付かせたい時に、ベルト自由端にあるトリガ−ピン250に同期リング700を滑り接触させることで、ベルト200はトリガ−ピン250に引かれて軸500に巻き付き始め、巻き付き角度の増加ととも摩擦力は増大して、ベルト200と軸500は完全に摩擦固定される。図10はベルト連結器の主要部を分かり易くした構成図であり、同期リング700も描いている。同期リング700を軸方向にスライドさせるには、U字型のホ−クやスラスト軸受など、既存のクラッチやマニュアル式の変速機で使われている方法を利用すれば良い。なお同期リング700が軸500と同じように回転するため、図8,図9,図10では同期リング700の内周部にロック用の突起701を設け、軸500の外周面部には、突起701と嵌め合わせるため、3箇所に回り止めの溝501を付けている。
ベルトと接触する軸500の周面を滑らかにするためには、前とは逆に、同期リング700側に回り止めの溝加工を行い、ベルトと接触する軸500の周面領域の外側に該溝に嵌る凸部となるパ−ツを軸500に取り付けるようにしても良い。
【0025】
他の応用例は、図示していないが、ハンモック吊機構として応用した例である。ハンモック吊機構に用いるベルト連結器は、巻き付け体としてラチェット式回転体を設け、このラチェット式回転体を回転させて、ベルトの自由端から所定長さの巻き付け領域を重ねて巻きつけた後、その位置で戻り回転を阻止するラチェット機構を具備し、ベルトの他端部をハンモックの両側の各々に接続固定して吊り下げたものである。
ラチェット式回転体の周面と接触するベルトの部位には摩擦係数の大きいゴム膜をコーティングし,重ね巻き領域になるベルト同士が接触する部位には摩擦係数の小さいポリエチレン膜をコーティングしてある。この機構により、ラチェット式回転体を所定数回転させてベルトの自由端側のゴム膜コーティング領域を周面に巻き付かせて、続いてポリエチレン膜コーティング領域を重ね巻きして後、ラチェット機構で巻き戻りをロックしておくことにより、ベルトの他端部に掛るハンモック荷重により、ゴム膜コーティング領域が、ラチェット式回転体周面に締め付け固定され、ハンモックを吊り支持する。これに人が乗ればより強固に締め付け固定され、落下することは無い。この例はトランポリンなどの吊支持用のベルト連結器としても応用可能である。
【産業上の利用可能性】
【0026】
本発明のベルト連結器は、一端を操作用の自由端とし、他端部を固定連結した、吊支持用のベルト、牽引用ベルト、締め付け固定用ベルト等の自由端側に設けるベルト連結器であり、前述の応用例で紹介したように、産業上の幅広い用途が可能である。
【図面の簡単な説明】
【0027】
【図1】本発明基本原理を説明するための図面であり、円筒に重ね巻きされたベルトの状態例を示す断面説明図である。
【図2】重ね巻き角度θ1とベルト張力比の関係の一例としてμ=0.3,θ3=345°である場合の計算結果を示す.
【図3】θ3=355.2°である場合について、数15の条件式を満足する幾つかのκとθ1を求めた計算結果を、摩擦係数μをパラメ−タとして表したグラフ。
【図4】極限であるベルト同士の摩擦係数μb=0である場合のロック条件を、数11より計算した結果の例をθ1とμとの関係で示すグラフ。
【図5】μ=0.25、θ3=355.2°である場合に、κ=μb/μ=0.6,1,1.4として数10を計算した結果の例を、T1 /T4とθ1との関係で示すグラフ。
【図6】自己締結型のベルト連結器例を示す斜視説明図である。
【図7】自己締結型のベルト連結器にベルトを巻きつけている様子を示す斜視説明図である。
【図8】回転トルクを制御するトルク伝達機構に応用したベルト連結器を示す。
【図9】図8に示すベルト連結器の斜視図である。
【図10】図9に示すベルト連結器の分解構成図である。
【符号の説明】
【0028】
100 円筒(巻き付け体)
200 ベルト
201 ベルト自由端部
300 ベルト表面のゴム膜
400 ベルト同士の摩擦係数を小さくするための摩擦係数の小さなチュ−ブ
【特許請求の範囲】
【請求項1】
円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を重ね巻きして連結するベルト連結器において、
巻き付け体に巻き付くベルトと巻き付け体の周面との摩擦係数μを、重ね巻きベルト同士の摩擦係数μbより大きくし、次式で示す巻き付け体に巻き付いたベルトの前記自由端のベルト張力T4と、ベルトの他端の非巻付側に掛るベルト張力T1との比において、ベルトの上にベルトを巻きつけるベルトの重ね巻き角度θ1を、ベルト張力T4が0となるベルトの重ね巻き角度以上に設定してなることを特徴とするベルト連結器。
【数1】
但し、θ3は、巻き付け体の周面に対するベルト一巻き目の実質的巻き付け角度
【請求項1】
円周面を有する巻き付け体にベルトの自由端から所定長さの巻き付け領域を重ね巻きして連結するベルト連結器において、
巻き付け体に巻き付くベルトと巻き付け体の周面との摩擦係数μを、重ね巻きベルト同士の摩擦係数μbより大きくし、次式で示す巻き付け体に巻き付いたベルトの前記自由端のベルト張力T4と、ベルトの他端の非巻付側に掛るベルト張力T1との比において、ベルトの上にベルトを巻きつけるベルトの重ね巻き角度θ1を、ベルト張力T4が0となるベルトの重ね巻き角度以上に設定してなることを特徴とするベルト連結器。
【数1】
但し、θ3は、巻き付け体の周面に対するベルト一巻き目の実質的巻き付け角度
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−228822(P2009−228822A)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願番号】特願2008−75825(P2008−75825)
【出願日】平成20年3月24日(2008.3.24)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成19年9月10日 社団法人日本トライボロジー学会発行の「トライボロジー会議予稿集 佐賀 2007−9」に発表
【出願人】(304028726)国立大学法人 大分大学 (181)
【Fターム(参考)】
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願日】平成20年3月24日(2008.3.24)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成19年9月10日 社団法人日本トライボロジー学会発行の「トライボロジー会議予稿集 佐賀 2007−9」に発表
【出願人】(304028726)国立大学法人 大分大学 (181)
【Fターム(参考)】
[ Back to top ]