
ベルト駆動制御装置及びこれを備えた画像形成装置
【課題】 ベルトを駆動あるいは支持するローラのラジアル方向やスラスト方向に動きを加えずにローラを制御するベルト駆動制御装置及びこれを備えた画像形成装置を提供する。
【解決手段】 モータ1、1−a、1−b、複数のローラ2−a、2−b、2−c、及び前記モータ1、1−a、1−bと前記ローラ2−a、2−bに張架される無端ベルト4を備え、前記モータ1、1−a、1−bの駆動力を伝達して前記無端ベルト4を駆動させるベルト駆動装置において、前記無端ベルト4の蛇行量を検出する蛇行検出器5、並列に配置されかつ少なくとも1つを駆動ローラとする前記複数個のローラローラ2−a、2−b、及び前記駆動ローラ2−a、2−bの回転速度を変更する回転速度変更手段9を含み、前記回転速度で前記駆動ローラ2−a、2−bの回転を制御する。
【解決手段】 モータ1、1−a、1−b、複数のローラ2−a、2−b、2−c、及び前記モータ1、1−a、1−bと前記ローラ2−a、2−bに張架される無端ベルト4を備え、前記モータ1、1−a、1−bの駆動力を伝達して前記無端ベルト4を駆動させるベルト駆動装置において、前記無端ベルト4の蛇行量を検出する蛇行検出器5、並列に配置されかつ少なくとも1つを駆動ローラとする前記複数個のローラローラ2−a、2−b、及び前記駆動ローラ2−a、2−bの回転速度を変更する回転速度変更手段9を含み、前記回転速度で前記駆動ローラ2−a、2−bの回転を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の支持部材に張架された無端ベルトの蛇行を補正するベルト駆動制御装置及びこれを備えた複写機、プリンタ、ファクシミリ等の画像形成装置に関するものである。
【背景技術】
【0002】
従来無端ベルトは、複写機やプリンタ等の画像形成装置の中で、中間転写ベルト、感光体ベルト、または用紙搬送ベルトとして利用される。一般に、無端ベルトは複数のローラで支持され、いずれかのローラを回転駆動することで、無端ベルトを走行させることが知られている(例えば、特許文献1乃至4参照)。
上記無端ベルトの走行中に、ベルト幅方向(ローラ軸方向)に移動する現象が起きることがあり、これはベルトの蛇行と呼ばれる。このベルト蛇行現象は、カラー画像形成装置においてとくに問題となる。カラー画像形成装置ではイエロー、マゼンタ、シアン、ブラックの各色を擁す画像ユニットを備えている。
この画像ユニットは中間転写ベルトまたはベルトで搬送される転写紙に各色の画像を重ねて転写する。このさいに、各色の画像に相対的な位置ずれがあると、画像の色ずれや色むら等が生じる。そのため、高品質な出力画像を得るためには、ベルトの蛇行を補正する必要がある。
そこで、ベルトの蛇行補正技術は幾つか提案されている、それらは大きく分けて、ローラを傾斜させる技術と、ベルト幅方向の動きを規制する技術の2つからなる。前者のローラを傾斜させる技術としては、特許文献1や特許文献2がある。
特許文献1には、ベルトに張力を与える張力付加ローラの左右の荷重差によってベルトの蛇行補正をする技術が開示されている。また、特許文献2には、ローラに巻き付いたベルトの移動方向と定められた移動方向との傾斜を検出し、ステアリングローラで傾斜を修正する技術が開示されている。
後者の、ベルト幅方向の動きを規制する技術としては、公知技術として認知されているリブやガイドにおける寄り止めの他に、特許文献3や特許文献4がある。
特許文献3では、ローラの径を左右で変えて径の大きい方を寄り止めとする技術が開示されている。また、特許文献4では、ローラの外側ほど径を小さくすることでベルトの偏りと逆方向に力を発生する技術が開示されている。
【特許文献1】特開2002−296972公報
【特許文献2】特開2003−312885公報
【特許文献3】特開平06−278894号公報
【特許文献4】特開平11−079457号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記ローラを傾斜する従来技術においては、感光体ドラムと中間転写ベルトとの接触が一様でないため、転写異常を引き起す問題があった。また、上記ベルト幅方向の動きを規制する従来技術においては、リブやガイドの接触によってベルトの破損を引き起す問題があった。
さらに、両技術に共通の問題としては、ベルトの回転方向以外に力を加えるため、ベルトの円滑な駆動に支障をきたす問題があった。
そこで、本発明の目的は、上述した実情を考慮して、ベルトを駆動あるいは支持するローラのラジアル方向やスラスト方向に動きを加えずにローラを制御するベルト駆動制御装置及びこれを備えた例えば画像形成装置を提供することにある。
【課題を解決するための手段】
【0004】
上記の課題を解決するために、請求項1に記載の発明は、駆動ローラと従動ローラとから成る複数のローラと、駆動ローラを駆動するモータと、前記複数のローラに張架される無端ベルトと、を備え、モータにより駆動モータを駆動することにより無端ベルトを駆動させるベルト駆動装置において、前記駆動ローラは、同一軸線上に配置された複数の分割駆動ローラから成ると共に、少なくとも一方の分割駆動ローラを前記モータにより駆動する構成を有し、前記無端ベルトの蛇行量を検出する蛇行検出器と、蛇行検出器が検出した蛇行量に基づいて前記分割駆動ローラの回転速度の変更値を算出する回転速度変更手段と、回転速度変更手段が算出した制御情報に基づいて前記分割駆動ローラの回転速度を制御する制御手段と、を備えたことを特徴とする。
請求項2の発明は、請求項1において、前記複数の分割駆動ローラのうちの一つが前記モータと結合し、他の一つがブレーキと結合することを特徴とする。
請求項3の発明は、請求項1又は2において、前記複数個の分割駆動ローラの間に従動ローラを配置したことを特徴とする。
請求項4の発明は、請求項1、2又は3において、前記無端ベルトの回転方向の速度を検出する手段を備えたことを特徴とする。
請求項5の発明は、請求項1乃至4において、前記各分割駆動ローラにエンコーダを取り付けたことを特徴とする。
【0005】
請求項6の発明は、請求項1乃至5において、前記回転速度変更手段は、ベルトの蛇行量と蛇行補正のための分割駆動ローラ回転速度とを対応づけたテーブルから駆動ローラ回転速度差輪郭を作成し、前記分割駆動ローラの目標回転速度を生成することを特徴とする。
請求項7の発明は、請求項1乃至6において、前記分割駆動ローラ位置と前記蛇行検出器の検出位置を同位置とすることを特徴とする。
請求項8の発明は、請求項1乃至6において、前記回転速度変更手段が、前記分割駆動ローラ位置と前記検出器の検出位置での蛇行周期の位相差から前記分割駆動ローラ回転速度を生成することを特徴とする。
請求項9に記載の発明は、前記無端ベルトにはトナーを付着させて転写紙に転写する請求項1乃至8のいずれか一項記載のベルト駆動制御装置を用いた画像形成装置を特徴とする。
請求項10に記載の発明は、前記無端ベルトが転写紙を搬送し、感光体ドラム上のトナーを前記転写紙に付着させる請求項1乃至8のいずれか一項記載のベルト駆動制御装置を用いた画像形成装置を特徴とする。
【発明の効果】
【0006】
本発明によれば、ベルト蛇行方向のローラ回転速度を上げたり、偏り反対側のローラ負荷を増加したりすることで、ベルトをスラスト方向やラジアル方向に動かすことなく蛇行を抑制することができる。
【発明を実施するための最良の形態】
【0007】
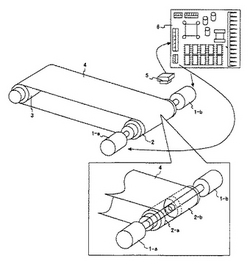
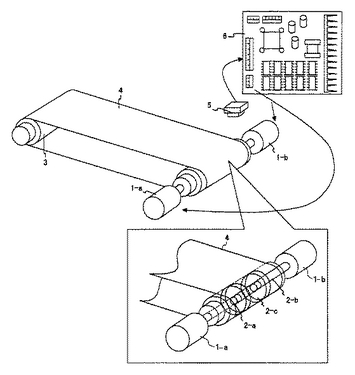
以下、図面を参照して、本発明の実施の形態を詳細に説明する。図1はモータを並列に配置した、本発明によるベルト駆動制御装置の第1の実施の形態を示す構成図である。この機械構造と動作について説明する。図1では、モータ1−aと1−bの2つを備え、両モータによって駆動ローラ2(2−a、2−b)を駆動する。
モータ1−aと1−bの夫々の回転速度は制御ボード6からの速度指令信号によって制御されている。2つのモータ1−aと1−bの駆動力により、独立した各駆動ローラ(分割駆動ローラ)2−a、2−bが無端ベルト4を駆動し、その駆動力を従動ローラ3に伝達する。
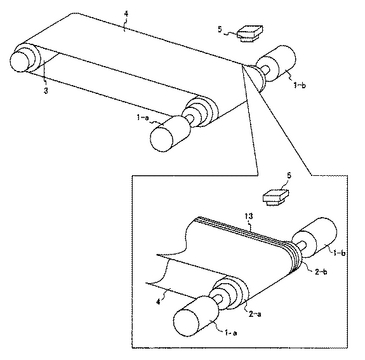
このとき、蛇行検出器5は無端ベルト4の蛇行を検出する。蛇行検出器5は図1のように、ベルト端縁に沿って形成した蛇行検出用マーカ13(図14参照)がベルト幅方向に変動した量を検出する。検出した蛇行の有無、蛇行量は制御ボード6に送られる。制御ボード6は検出した蛇行量からモータ1−aと1−bの回転速度を補正、決定して、再びモータ速度指令信号を送る。
【0008】
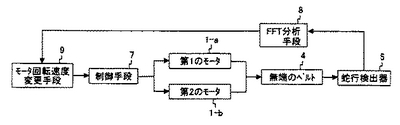
図2はベルト駆動制御装置をシステムとして示すブロック図である。図2において、制御手段7は、第1のモータ1−aと第2のモータ1−bに夫々速度指令信号を与えて駆動させる。
即ち無端ベルト4の蛇行量を検出する蛇行検出器5と、蛇行検出器5が検出した蛇行量に基づいて分割駆動ローラ2−a、2−bの各回転速度の変更値(最適の回転速度)を算出する回転速度変更手段9と、回転速度変更手段9が算出した各分割駆動ローラの回転速度に関する制御情報に基づいて分割駆動ローラの回転速度を制御する制御手段7と、を備えている。
両モータ1−aと1−bの回転駆動力は無端ベルト4に伝達されて駆動する。無端ベルト4の蛇行を後述する図14のような蛇行検出器5で検出して、メカ信号に含まれている周波数成分を分析するFFT分析手段(周波数分析手段)8によるFFT分析を行う。
FFT分析によって、各周波数に対する蛇行量が算出され、この情報はモータ回転速度変更手段9に送られる。モータ回転速度変更手段9は、蛇行量がある閾値以上かどうかを各周波数で処理し、閾値以上の蛇行成分を全て合成する。
或る時刻に、蛇行が第1のモータ1−a側の駆動ローラ2−aに発生している場合、その蛇行周期に合せて第1のモータ1−aの回転速度を上昇させるかあるいは第2のモータ1−bの回転速度を下降させる指令(制御情報)を制御手段7に出力する。
さらには両方を合せても良い。また、或る時刻に、蛇行が第2のモータ1−b側の分割駆動ローラ2−bに出ている場合、その蛇行周期に合せて第2のモータ1−bの回転速度を上昇させるかあるいは第1のモータ1−aの回転速度を下降させる。
さらには両方の制御方法を併せて実施しても良い。こうして、FFT分析手段8で抽出した蛇行が周期的であることを利用して、蛇行でベルトが寄る方向と反対側のローラ回転速度を相対的に高めて、左右の回転速度差によって蛇行を抑制する。
駆動源であるモータ1、1−a、1−bと負荷発生源であるブレーキを並列配置することによって、無端ベルト4の幅方向で厚みが変わっているときに生じる無端ベルト4の寄りも解消できる。
【0009】
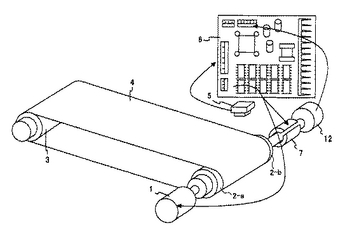
図3はモータとブレーキを組み合せた、本発明によるベルト駆動制御装置の第2の実施の形態を示す構成図である。図3において、駆動ローラ(分割駆動ローラ)2−a、2−bの一方がモータ1と結合し、他方がブレーキ10と結合している。
分割駆動ローラ2−a、2−b間はクラッチのような構造により連結されており、モータ1の駆動力を反対側の分割駆動ローラ2−a、2−bに伝達する量を調整できる構造であれば良い。
この機構は無端ベルト4の厚みが幅方向で異なる場合に利用する。つまり、モータ1側の無端ベルト4の厚みが薄く、ブレーキ側の無端ベルト4が厚い場合に、モータ1側のベルト速度が常に落ちているため、ブレーキ側の駆動ローラ回転速度を落とす。
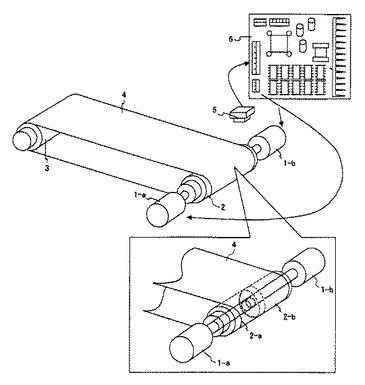
図4は軸方向に直列に配置したローラに従動ローラのある、本発明によるベルト駆動制御装置の第3の実施の形態を示す構成図である。直列配置するローラの1つまたは複数が従動ローラである。
2つのモータ1−a、1−bと夫々直結した分割駆動ローラ2−a、2−bの間に同軸状に従動ローラ2−cを挟んでいる。そして、従動ローラ2−c自体は回転速度を制御されずに、左右の分割駆動ローラ2−a、2−bで駆動力を与えられて駆動する無端ベルト4に連れ回る。
分割駆動ローラ2−a、2−bの他に従動ローラ2−cを並列配置することによって、ローラ回転速度差のバランスをとることができ、また、ベルト搬送の左右の速度差を緩和することができる。
【0010】
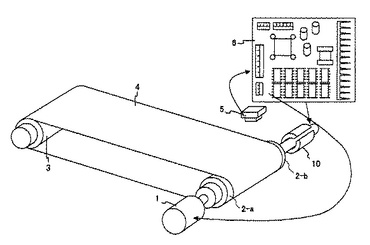
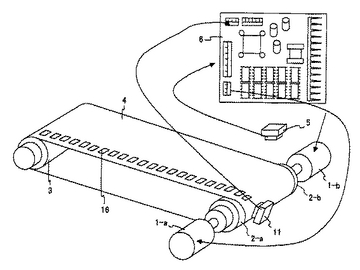
図5はベルト回転速度検出器を備えた、本発明によるベルト駆動制御装置の第4の実施の形態を示す構成図である。蛇行抑制のために、1つの無端ベルト4に異なる回転速度を有するモータ1−a、1−bを用いている。分割駆動ローラ2−a、2−bは各モータにより駆動される。
そのため、モータ1−a、1−bの回転速度から正確に無端ベルト4の表面速度を推定することは難しい。そこで、無端ベルト4自体にベルト回転速度検出器11を取り付けて、表面速度が狙い通りかどうかを確認する。
このとき、表面速度を上げたい場合は、左右の分割駆動ローラ2−a、2−bの回転速度を一律に上げるように、モータの回転速度を上げたり、ブレーキの負荷を低減したりする。負荷や回転速度差が変化しても所望のベルト速度が出ているか検出することで、所望のベルト速度まで制御量を調整できる。
逆に、表面速度を下げたい場合は、左右の分割駆動ローラ2−a、2−bの回転速度を一律に下げるように、モータ1−a、1−bの回転速度を下げたり、ブレーキの負荷を増加したりする。
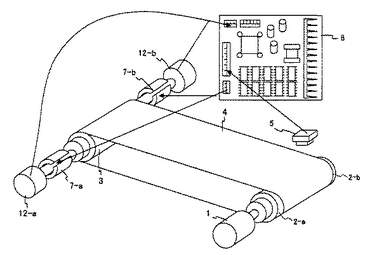
図6はブレーキ構成の駆動ローラにエンコーダを備えた、本発明によるベルト駆動制御装置の構成を示す概略斜視図である。図7は直列配置したブレーキ構成の従動ローラ3にエンコーダとブレーキを設けた、本発明によるベルト駆動制御装置の構成を示す概略斜視図である。
図6では、分割駆動ローラ2−a、2−bの少なくとも一方には、軸の回転速度を検知するエンコーダ12を取り付けている。このエンコーダ12はモータ1と一体型のエンコーダでもよく、図1、図3、図5に示されるモータ1、1−a、1−bに取り付ける。
モータ1、1−a、1−bの回転速度を常に監視することで、回転速度差が狙いよりも大きくなったり小さくなったりしていないかどうかを確認する。また、ブレーキ構成の駆動ローラにエンコーダを取り付ける構成もある。
このように、クラッチにて連結された2つの分割駆動ローラ2−a、2−bにエンコーダ12を取り付けることによって、駆動ローラ回転速度あるいは回転速度差を高精度に管理することができる。
【0011】
図7では、2分割された従動ローラ3−a、3−bに夫々ブレーキ7−a、7−bを設けると共に、各軸にエンコーダ12−a、12−bを設けている。駆動ローラ2は一本である。
図8は本発明の実施の形態である蛇行検出器と駆動ローラ速度変更位置の位相差を示す説明図である。蛇行量はベルト幅方向の速度差と言い換えることができる。また、ローラの回転速度はベルト搬送方向の速度である。
したがって、無端ベルト幅方向の速度差を搬送方向の速度差に変換することで、無端ベルト4の蛇行を補正するために直列配置した分割駆動ローラ2−a、2−bの目標回転速度を決定できる。ここでは、図1のようなベルト駆動制御装置を例として説明する。
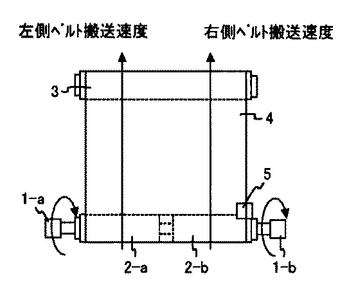
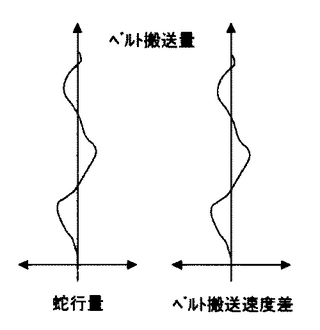
図9は図1のモータを直列に配置した本発明によるベルト駆動制御装置を上から見た図である。図10は補正すべきベルト搬送速度差の輪郭を示す概略図である。図9ではベルト移動量に対して発生する蛇行量と変更する回転速度差を説明している。
このとき、ベルト搬送量に対して蛇行量は図10の左のグラフのように検出される。蛇行量の左右の軸は、図9のベルト幅方向の左右に対応している。このとき、補正すべきベルト搬送速度差輪郭は図10の右のグラフのようになる。
右のグラフにおいて、ベルト搬送速度の左右の軸は、図9の左側ベルト搬送速度と右側ベルト搬送速度の差である。したがって、ベルト搬送速度差が左側に大きくなっているところでは、右側よりも左側のベルト搬送速度を上げるようにモータ回転速度を変更する。
また、ベルト搬送速度差はローラ回転速度に駆動ローラ半径を掛け合わせたものであるから、ベルト搬送速度の軸のスケールを変えれば、そのまま駆動ローラ回転速度差の輪郭として利用できる。
【0012】
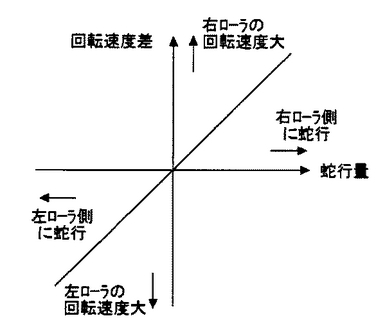
図11は蛇行量と回転速度差の対応関係を説明する図である。ベルト搬送量に対する駆動ローラ回転速度差輪郭は、図11のような蛇行量と駆動ローラ回転速度差の対応関係テーブルから、例えばモータ回転速度変更手段9、或いは制御手段7が作成する。ところで、このテーブルは製品出荷時に生成しても良いし、製品の稼動中に生成しても良い。
無端ベルト4の蛇行には周期性があるので、その周期に合せて駆動ローラ回転速度差プロファイルを作成する。そして、左右の分割駆動ローラ目標回転速度を決定する。回転速度差テーブルを用いることによって、ベルト幅方向の速度差である蛇行量を減衰させるための駆動ローラ目標回転速度を速やかに生成することができる。
ベルト駆動制御装置は駆動ローラ位置と検出器の検出位置を同位置とする。この検出器は直列に配置した分割駆動ローラ2−a、2−bの法線方向上で検出するように配置する。
また、無端ベルト4が架けられている分割駆動ローラのうち、伝達力が大きく働く場所はベルトが分割駆動ローラに架かる位置であるから、この部分の蛇行を検出することが最も高感度として好ましい。検出と制御を同位置で行うことで、簡易なフィードバック制御系を実現できる。
ベルト駆動制御装置において、回転速度生成手段は分割駆動ローラ位置と検出器の検出位置での蛇行周期の位相差から制御回転速度を生成する。図4のような構成を有する場合、側面図である図8で示した区間を位相差に変換する。
変換方法は区間を通過する時間に駆動ローラ回転速度をかける。この位相差と蛇行の周期性を用いて、蛇行検出器上の蛇行を駆動ローラ上の蛇行に換算して、駆動ローラ回転速度の制御に利用する。検出位置での蛇行を駆動ローラ位置での蛇行に換算することで、より高精度な制御ができる。
【0013】
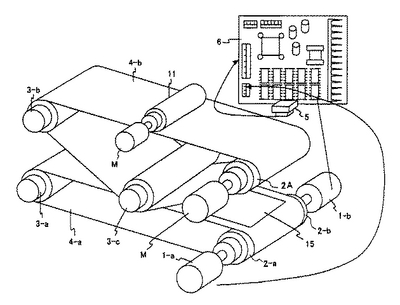
図12は本発明の実施の形態である中間転写ベルトを備えた画像形成装置の構成図を示す概略斜視図である。この画像形成装置は無端ベルト4にはトナーを付着させて転写紙15に転写する。符号11は感光体、Mはモータであり、2Aは駆動ローラであり、Mはモータである。
蛇行の検出と補正は、転写の前に自動的に行うようにする。また、蛇行は周期性があるので、検出とモータ速度を変更した情報は、画像形成装置の電源を切っても記憶できる構造にしておくと良い。感光体ベルト4−bの蛇行を抑制することで、色ずれの少ない転写ができる。
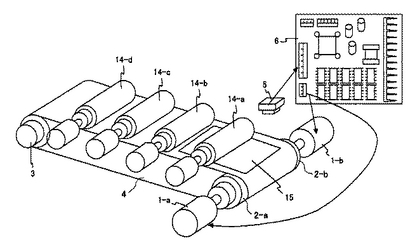
図13は本発明の実施の形態である4連タンデムの画像形成装置の構成を示す概略斜視図である。無端ベルト4は転写紙15を搬送し、感光体ドラム14−a、14−b、14−c、14−d上のトナーを転写紙15に付着させる。
蛇行の検出と補正は、転写の前に自動的に行うようにする。また、蛇行は周期性があるので、検出とモータ速度を変更した情報は、画像形成装置の電源を切っても記憶できる構造にしておくと良い。転写ベルトの蛇行を抑制することで、色ずれの少ない転写ができる。
図14は蛇行検出器を説明する概略斜視図である。図1に関連して説明したように、蛇行検出器5は無端ベルト4の蛇行を検出する。蛇行検出器5は図1のように、蛇行検出用マーカ13がベルト幅方向に変動した量を検出する。検出した蛇行は制御ボード6に送られる。
要するに、ローラのラジアル方向やスラスト方向に力を加えるのではなく、回転方向の力あるいは速度を調整して、ローラを並列に配置して左右のローラ回転速度差によって蛇行を制御するようにしている。
【図面の簡単な説明】
【0014】
【図1】モータを直列に配置した、本発明によるベルト駆動制御装置の第1の実施の形態を示す構成図。
【図2】ベルト駆動制御装置をシステムとして示すブロック図。
【図3】モータとブレーキを組み合せた、本発明によるベルト駆動制御装置の第2の実施の形態を示す構成図。
【図4】本発明によるベルト駆動制御装置の第3の実施の形態を示す構成図。
【図5】ベルト回転速度検出器を備えた、本発明によるベルト駆動制御装置の第4の実施の形態を示す構成図。
【図6】ブレーキ構成の駆動ローラにエンコーダを備えた、本発明によるベルト駆動制御装置の構成を示す概略斜視図。
【図7】ブレーキ構成の駆動ローラにエンコーダを設けた、本発明によるベルト駆動制御装置の構成を示す概略斜視図。
【図8】本発明の実施の形態である蛇行検出器と駆動ローラ速度変更位置の位相差を示す説明図。
【図9】図1のモータを直列に配置した本発明によるベルト駆動制御装置を上から見た図。
【図10】補正すべきベルト搬送速度差の輪郭を示す概略図。
【図11】蛇行量と回転速度差の対応関係を説明する図。
【図12】本発明の実施の形態である中間転写ベルトを備えた画像形成装置の構成図を示す概略斜視図。
【図13】本発明の実施の形態である4連タンデムの画像形成装置の構成を示す概略斜視図。
【図14】蛇行検出器を説明する概略斜視図。
【符号の説明】
【0015】
1 モータ
1−a モータ、1−b モータ、2−a 並列配置の駆動ローラ、2−b 並列配置の駆動ローラ、2−c 並列配置の従動ローラ、4 無端ベルト、4a 無端ベルト、4b 無端ベルト(感光体ベルト)、5 蛇行検出器、7 制御手段、8 FFT分析手段、9 モータ回転速度変更手段、10 ブレーキ、10−a ブレーキ、10−b ブレーキ、11 ベルト回転速度検出器、12 エンコーダ、12−a エンコーダ、12−b エンコーダ、13 蛇行検出用マーカ、14−a 感光体ドラム、14−b 感光体ドラム、14−c 感光体ドラム、14−d 感光体ドラム、15 転写紙、16 ベルト速度検出用マーカ、
【技術分野】
【0001】
本発明は、複数の支持部材に張架された無端ベルトの蛇行を補正するベルト駆動制御装置及びこれを備えた複写機、プリンタ、ファクシミリ等の画像形成装置に関するものである。
【背景技術】
【0002】
従来無端ベルトは、複写機やプリンタ等の画像形成装置の中で、中間転写ベルト、感光体ベルト、または用紙搬送ベルトとして利用される。一般に、無端ベルトは複数のローラで支持され、いずれかのローラを回転駆動することで、無端ベルトを走行させることが知られている(例えば、特許文献1乃至4参照)。
上記無端ベルトの走行中に、ベルト幅方向(ローラ軸方向)に移動する現象が起きることがあり、これはベルトの蛇行と呼ばれる。このベルト蛇行現象は、カラー画像形成装置においてとくに問題となる。カラー画像形成装置ではイエロー、マゼンタ、シアン、ブラックの各色を擁す画像ユニットを備えている。
この画像ユニットは中間転写ベルトまたはベルトで搬送される転写紙に各色の画像を重ねて転写する。このさいに、各色の画像に相対的な位置ずれがあると、画像の色ずれや色むら等が生じる。そのため、高品質な出力画像を得るためには、ベルトの蛇行を補正する必要がある。
そこで、ベルトの蛇行補正技術は幾つか提案されている、それらは大きく分けて、ローラを傾斜させる技術と、ベルト幅方向の動きを規制する技術の2つからなる。前者のローラを傾斜させる技術としては、特許文献1や特許文献2がある。
特許文献1には、ベルトに張力を与える張力付加ローラの左右の荷重差によってベルトの蛇行補正をする技術が開示されている。また、特許文献2には、ローラに巻き付いたベルトの移動方向と定められた移動方向との傾斜を検出し、ステアリングローラで傾斜を修正する技術が開示されている。
後者の、ベルト幅方向の動きを規制する技術としては、公知技術として認知されているリブやガイドにおける寄り止めの他に、特許文献3や特許文献4がある。
特許文献3では、ローラの径を左右で変えて径の大きい方を寄り止めとする技術が開示されている。また、特許文献4では、ローラの外側ほど径を小さくすることでベルトの偏りと逆方向に力を発生する技術が開示されている。
【特許文献1】特開2002−296972公報
【特許文献2】特開2003−312885公報
【特許文献3】特開平06−278894号公報
【特許文献4】特開平11−079457号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記ローラを傾斜する従来技術においては、感光体ドラムと中間転写ベルトとの接触が一様でないため、転写異常を引き起す問題があった。また、上記ベルト幅方向の動きを規制する従来技術においては、リブやガイドの接触によってベルトの破損を引き起す問題があった。
さらに、両技術に共通の問題としては、ベルトの回転方向以外に力を加えるため、ベルトの円滑な駆動に支障をきたす問題があった。
そこで、本発明の目的は、上述した実情を考慮して、ベルトを駆動あるいは支持するローラのラジアル方向やスラスト方向に動きを加えずにローラを制御するベルト駆動制御装置及びこれを備えた例えば画像形成装置を提供することにある。
【課題を解決するための手段】
【0004】
上記の課題を解決するために、請求項1に記載の発明は、駆動ローラと従動ローラとから成る複数のローラと、駆動ローラを駆動するモータと、前記複数のローラに張架される無端ベルトと、を備え、モータにより駆動モータを駆動することにより無端ベルトを駆動させるベルト駆動装置において、前記駆動ローラは、同一軸線上に配置された複数の分割駆動ローラから成ると共に、少なくとも一方の分割駆動ローラを前記モータにより駆動する構成を有し、前記無端ベルトの蛇行量を検出する蛇行検出器と、蛇行検出器が検出した蛇行量に基づいて前記分割駆動ローラの回転速度の変更値を算出する回転速度変更手段と、回転速度変更手段が算出した制御情報に基づいて前記分割駆動ローラの回転速度を制御する制御手段と、を備えたことを特徴とする。
請求項2の発明は、請求項1において、前記複数の分割駆動ローラのうちの一つが前記モータと結合し、他の一つがブレーキと結合することを特徴とする。
請求項3の発明は、請求項1又は2において、前記複数個の分割駆動ローラの間に従動ローラを配置したことを特徴とする。
請求項4の発明は、請求項1、2又は3において、前記無端ベルトの回転方向の速度を検出する手段を備えたことを特徴とする。
請求項5の発明は、請求項1乃至4において、前記各分割駆動ローラにエンコーダを取り付けたことを特徴とする。
【0005】
請求項6の発明は、請求項1乃至5において、前記回転速度変更手段は、ベルトの蛇行量と蛇行補正のための分割駆動ローラ回転速度とを対応づけたテーブルから駆動ローラ回転速度差輪郭を作成し、前記分割駆動ローラの目標回転速度を生成することを特徴とする。
請求項7の発明は、請求項1乃至6において、前記分割駆動ローラ位置と前記蛇行検出器の検出位置を同位置とすることを特徴とする。
請求項8の発明は、請求項1乃至6において、前記回転速度変更手段が、前記分割駆動ローラ位置と前記検出器の検出位置での蛇行周期の位相差から前記分割駆動ローラ回転速度を生成することを特徴とする。
請求項9に記載の発明は、前記無端ベルトにはトナーを付着させて転写紙に転写する請求項1乃至8のいずれか一項記載のベルト駆動制御装置を用いた画像形成装置を特徴とする。
請求項10に記載の発明は、前記無端ベルトが転写紙を搬送し、感光体ドラム上のトナーを前記転写紙に付着させる請求項1乃至8のいずれか一項記載のベルト駆動制御装置を用いた画像形成装置を特徴とする。
【発明の効果】
【0006】
本発明によれば、ベルト蛇行方向のローラ回転速度を上げたり、偏り反対側のローラ負荷を増加したりすることで、ベルトをスラスト方向やラジアル方向に動かすことなく蛇行を抑制することができる。
【発明を実施するための最良の形態】
【0007】
以下、図面を参照して、本発明の実施の形態を詳細に説明する。図1はモータを並列に配置した、本発明によるベルト駆動制御装置の第1の実施の形態を示す構成図である。この機械構造と動作について説明する。図1では、モータ1−aと1−bの2つを備え、両モータによって駆動ローラ2(2−a、2−b)を駆動する。
モータ1−aと1−bの夫々の回転速度は制御ボード6からの速度指令信号によって制御されている。2つのモータ1−aと1−bの駆動力により、独立した各駆動ローラ(分割駆動ローラ)2−a、2−bが無端ベルト4を駆動し、その駆動力を従動ローラ3に伝達する。
このとき、蛇行検出器5は無端ベルト4の蛇行を検出する。蛇行検出器5は図1のように、ベルト端縁に沿って形成した蛇行検出用マーカ13(図14参照)がベルト幅方向に変動した量を検出する。検出した蛇行の有無、蛇行量は制御ボード6に送られる。制御ボード6は検出した蛇行量からモータ1−aと1−bの回転速度を補正、決定して、再びモータ速度指令信号を送る。
【0008】
図2はベルト駆動制御装置をシステムとして示すブロック図である。図2において、制御手段7は、第1のモータ1−aと第2のモータ1−bに夫々速度指令信号を与えて駆動させる。
即ち無端ベルト4の蛇行量を検出する蛇行検出器5と、蛇行検出器5が検出した蛇行量に基づいて分割駆動ローラ2−a、2−bの各回転速度の変更値(最適の回転速度)を算出する回転速度変更手段9と、回転速度変更手段9が算出した各分割駆動ローラの回転速度に関する制御情報に基づいて分割駆動ローラの回転速度を制御する制御手段7と、を備えている。
両モータ1−aと1−bの回転駆動力は無端ベルト4に伝達されて駆動する。無端ベルト4の蛇行を後述する図14のような蛇行検出器5で検出して、メカ信号に含まれている周波数成分を分析するFFT分析手段(周波数分析手段)8によるFFT分析を行う。
FFT分析によって、各周波数に対する蛇行量が算出され、この情報はモータ回転速度変更手段9に送られる。モータ回転速度変更手段9は、蛇行量がある閾値以上かどうかを各周波数で処理し、閾値以上の蛇行成分を全て合成する。
或る時刻に、蛇行が第1のモータ1−a側の駆動ローラ2−aに発生している場合、その蛇行周期に合せて第1のモータ1−aの回転速度を上昇させるかあるいは第2のモータ1−bの回転速度を下降させる指令(制御情報)を制御手段7に出力する。
さらには両方を合せても良い。また、或る時刻に、蛇行が第2のモータ1−b側の分割駆動ローラ2−bに出ている場合、その蛇行周期に合せて第2のモータ1−bの回転速度を上昇させるかあるいは第1のモータ1−aの回転速度を下降させる。
さらには両方の制御方法を併せて実施しても良い。こうして、FFT分析手段8で抽出した蛇行が周期的であることを利用して、蛇行でベルトが寄る方向と反対側のローラ回転速度を相対的に高めて、左右の回転速度差によって蛇行を抑制する。
駆動源であるモータ1、1−a、1−bと負荷発生源であるブレーキを並列配置することによって、無端ベルト4の幅方向で厚みが変わっているときに生じる無端ベルト4の寄りも解消できる。
【0009】
図3はモータとブレーキを組み合せた、本発明によるベルト駆動制御装置の第2の実施の形態を示す構成図である。図3において、駆動ローラ(分割駆動ローラ)2−a、2−bの一方がモータ1と結合し、他方がブレーキ10と結合している。
分割駆動ローラ2−a、2−b間はクラッチのような構造により連結されており、モータ1の駆動力を反対側の分割駆動ローラ2−a、2−bに伝達する量を調整できる構造であれば良い。
この機構は無端ベルト4の厚みが幅方向で異なる場合に利用する。つまり、モータ1側の無端ベルト4の厚みが薄く、ブレーキ側の無端ベルト4が厚い場合に、モータ1側のベルト速度が常に落ちているため、ブレーキ側の駆動ローラ回転速度を落とす。
図4は軸方向に直列に配置したローラに従動ローラのある、本発明によるベルト駆動制御装置の第3の実施の形態を示す構成図である。直列配置するローラの1つまたは複数が従動ローラである。
2つのモータ1−a、1−bと夫々直結した分割駆動ローラ2−a、2−bの間に同軸状に従動ローラ2−cを挟んでいる。そして、従動ローラ2−c自体は回転速度を制御されずに、左右の分割駆動ローラ2−a、2−bで駆動力を与えられて駆動する無端ベルト4に連れ回る。
分割駆動ローラ2−a、2−bの他に従動ローラ2−cを並列配置することによって、ローラ回転速度差のバランスをとることができ、また、ベルト搬送の左右の速度差を緩和することができる。
【0010】
図5はベルト回転速度検出器を備えた、本発明によるベルト駆動制御装置の第4の実施の形態を示す構成図である。蛇行抑制のために、1つの無端ベルト4に異なる回転速度を有するモータ1−a、1−bを用いている。分割駆動ローラ2−a、2−bは各モータにより駆動される。
そのため、モータ1−a、1−bの回転速度から正確に無端ベルト4の表面速度を推定することは難しい。そこで、無端ベルト4自体にベルト回転速度検出器11を取り付けて、表面速度が狙い通りかどうかを確認する。
このとき、表面速度を上げたい場合は、左右の分割駆動ローラ2−a、2−bの回転速度を一律に上げるように、モータの回転速度を上げたり、ブレーキの負荷を低減したりする。負荷や回転速度差が変化しても所望のベルト速度が出ているか検出することで、所望のベルト速度まで制御量を調整できる。
逆に、表面速度を下げたい場合は、左右の分割駆動ローラ2−a、2−bの回転速度を一律に下げるように、モータ1−a、1−bの回転速度を下げたり、ブレーキの負荷を増加したりする。
図6はブレーキ構成の駆動ローラにエンコーダを備えた、本発明によるベルト駆動制御装置の構成を示す概略斜視図である。図7は直列配置したブレーキ構成の従動ローラ3にエンコーダとブレーキを設けた、本発明によるベルト駆動制御装置の構成を示す概略斜視図である。
図6では、分割駆動ローラ2−a、2−bの少なくとも一方には、軸の回転速度を検知するエンコーダ12を取り付けている。このエンコーダ12はモータ1と一体型のエンコーダでもよく、図1、図3、図5に示されるモータ1、1−a、1−bに取り付ける。
モータ1、1−a、1−bの回転速度を常に監視することで、回転速度差が狙いよりも大きくなったり小さくなったりしていないかどうかを確認する。また、ブレーキ構成の駆動ローラにエンコーダを取り付ける構成もある。
このように、クラッチにて連結された2つの分割駆動ローラ2−a、2−bにエンコーダ12を取り付けることによって、駆動ローラ回転速度あるいは回転速度差を高精度に管理することができる。
【0011】
図7では、2分割された従動ローラ3−a、3−bに夫々ブレーキ7−a、7−bを設けると共に、各軸にエンコーダ12−a、12−bを設けている。駆動ローラ2は一本である。
図8は本発明の実施の形態である蛇行検出器と駆動ローラ速度変更位置の位相差を示す説明図である。蛇行量はベルト幅方向の速度差と言い換えることができる。また、ローラの回転速度はベルト搬送方向の速度である。
したがって、無端ベルト幅方向の速度差を搬送方向の速度差に変換することで、無端ベルト4の蛇行を補正するために直列配置した分割駆動ローラ2−a、2−bの目標回転速度を決定できる。ここでは、図1のようなベルト駆動制御装置を例として説明する。
図9は図1のモータを直列に配置した本発明によるベルト駆動制御装置を上から見た図である。図10は補正すべきベルト搬送速度差の輪郭を示す概略図である。図9ではベルト移動量に対して発生する蛇行量と変更する回転速度差を説明している。
このとき、ベルト搬送量に対して蛇行量は図10の左のグラフのように検出される。蛇行量の左右の軸は、図9のベルト幅方向の左右に対応している。このとき、補正すべきベルト搬送速度差輪郭は図10の右のグラフのようになる。
右のグラフにおいて、ベルト搬送速度の左右の軸は、図9の左側ベルト搬送速度と右側ベルト搬送速度の差である。したがって、ベルト搬送速度差が左側に大きくなっているところでは、右側よりも左側のベルト搬送速度を上げるようにモータ回転速度を変更する。
また、ベルト搬送速度差はローラ回転速度に駆動ローラ半径を掛け合わせたものであるから、ベルト搬送速度の軸のスケールを変えれば、そのまま駆動ローラ回転速度差の輪郭として利用できる。
【0012】
図11は蛇行量と回転速度差の対応関係を説明する図である。ベルト搬送量に対する駆動ローラ回転速度差輪郭は、図11のような蛇行量と駆動ローラ回転速度差の対応関係テーブルから、例えばモータ回転速度変更手段9、或いは制御手段7が作成する。ところで、このテーブルは製品出荷時に生成しても良いし、製品の稼動中に生成しても良い。
無端ベルト4の蛇行には周期性があるので、その周期に合せて駆動ローラ回転速度差プロファイルを作成する。そして、左右の分割駆動ローラ目標回転速度を決定する。回転速度差テーブルを用いることによって、ベルト幅方向の速度差である蛇行量を減衰させるための駆動ローラ目標回転速度を速やかに生成することができる。
ベルト駆動制御装置は駆動ローラ位置と検出器の検出位置を同位置とする。この検出器は直列に配置した分割駆動ローラ2−a、2−bの法線方向上で検出するように配置する。
また、無端ベルト4が架けられている分割駆動ローラのうち、伝達力が大きく働く場所はベルトが分割駆動ローラに架かる位置であるから、この部分の蛇行を検出することが最も高感度として好ましい。検出と制御を同位置で行うことで、簡易なフィードバック制御系を実現できる。
ベルト駆動制御装置において、回転速度生成手段は分割駆動ローラ位置と検出器の検出位置での蛇行周期の位相差から制御回転速度を生成する。図4のような構成を有する場合、側面図である図8で示した区間を位相差に変換する。
変換方法は区間を通過する時間に駆動ローラ回転速度をかける。この位相差と蛇行の周期性を用いて、蛇行検出器上の蛇行を駆動ローラ上の蛇行に換算して、駆動ローラ回転速度の制御に利用する。検出位置での蛇行を駆動ローラ位置での蛇行に換算することで、より高精度な制御ができる。
【0013】
図12は本発明の実施の形態である中間転写ベルトを備えた画像形成装置の構成図を示す概略斜視図である。この画像形成装置は無端ベルト4にはトナーを付着させて転写紙15に転写する。符号11は感光体、Mはモータであり、2Aは駆動ローラであり、Mはモータである。
蛇行の検出と補正は、転写の前に自動的に行うようにする。また、蛇行は周期性があるので、検出とモータ速度を変更した情報は、画像形成装置の電源を切っても記憶できる構造にしておくと良い。感光体ベルト4−bの蛇行を抑制することで、色ずれの少ない転写ができる。
図13は本発明の実施の形態である4連タンデムの画像形成装置の構成を示す概略斜視図である。無端ベルト4は転写紙15を搬送し、感光体ドラム14−a、14−b、14−c、14−d上のトナーを転写紙15に付着させる。
蛇行の検出と補正は、転写の前に自動的に行うようにする。また、蛇行は周期性があるので、検出とモータ速度を変更した情報は、画像形成装置の電源を切っても記憶できる構造にしておくと良い。転写ベルトの蛇行を抑制することで、色ずれの少ない転写ができる。
図14は蛇行検出器を説明する概略斜視図である。図1に関連して説明したように、蛇行検出器5は無端ベルト4の蛇行を検出する。蛇行検出器5は図1のように、蛇行検出用マーカ13がベルト幅方向に変動した量を検出する。検出した蛇行は制御ボード6に送られる。
要するに、ローラのラジアル方向やスラスト方向に力を加えるのではなく、回転方向の力あるいは速度を調整して、ローラを並列に配置して左右のローラ回転速度差によって蛇行を制御するようにしている。
【図面の簡単な説明】
【0014】
【図1】モータを直列に配置した、本発明によるベルト駆動制御装置の第1の実施の形態を示す構成図。
【図2】ベルト駆動制御装置をシステムとして示すブロック図。
【図3】モータとブレーキを組み合せた、本発明によるベルト駆動制御装置の第2の実施の形態を示す構成図。
【図4】本発明によるベルト駆動制御装置の第3の実施の形態を示す構成図。
【図5】ベルト回転速度検出器を備えた、本発明によるベルト駆動制御装置の第4の実施の形態を示す構成図。
【図6】ブレーキ構成の駆動ローラにエンコーダを備えた、本発明によるベルト駆動制御装置の構成を示す概略斜視図。
【図7】ブレーキ構成の駆動ローラにエンコーダを設けた、本発明によるベルト駆動制御装置の構成を示す概略斜視図。
【図8】本発明の実施の形態である蛇行検出器と駆動ローラ速度変更位置の位相差を示す説明図。
【図9】図1のモータを直列に配置した本発明によるベルト駆動制御装置を上から見た図。
【図10】補正すべきベルト搬送速度差の輪郭を示す概略図。
【図11】蛇行量と回転速度差の対応関係を説明する図。
【図12】本発明の実施の形態である中間転写ベルトを備えた画像形成装置の構成図を示す概略斜視図。
【図13】本発明の実施の形態である4連タンデムの画像形成装置の構成を示す概略斜視図。
【図14】蛇行検出器を説明する概略斜視図。
【符号の説明】
【0015】
1 モータ
1−a モータ、1−b モータ、2−a 並列配置の駆動ローラ、2−b 並列配置の駆動ローラ、2−c 並列配置の従動ローラ、4 無端ベルト、4a 無端ベルト、4b 無端ベルト(感光体ベルト)、5 蛇行検出器、7 制御手段、8 FFT分析手段、9 モータ回転速度変更手段、10 ブレーキ、10−a ブレーキ、10−b ブレーキ、11 ベルト回転速度検出器、12 エンコーダ、12−a エンコーダ、12−b エンコーダ、13 蛇行検出用マーカ、14−a 感光体ドラム、14−b 感光体ドラム、14−c 感光体ドラム、14−d 感光体ドラム、15 転写紙、16 ベルト速度検出用マーカ、
【特許請求の範囲】
【請求項1】
駆動ローラと従動ローラとから成る複数のローラと、駆動ローラを駆動するモータと、前記複数のローラに張架される無端ベルトと、を備え、モータにより駆動モータを駆動することにより無端ベルトを駆動させるベルト駆動装置において、
前記駆動ローラは、同一軸線上に配置された複数の分割駆動ローラから成ると共に、少なくとも一方の分割駆動ローラを前記モータにより駆動する構成を有し、
前記無端ベルトの蛇行量を検出する蛇行検出器と、蛇行検出器が検出した蛇行量に基づいて前記分割駆動ローラの回転速度の変更値を算出する回転速度変更手段と、回転速度変更手段が算出した制御情報に基づいて前記分割駆動ローラの回転速度を制御する制御手段と、を備えたことを特徴とするベルト駆動制御装置。
【請求項2】
前記複数の分割駆動ローラのうちの一つが前記モータと結合し、他の一つがブレーキと結合することを特徴とする請求項1に記載のベルト駆動制御装置。
【請求項3】
前記複数個の分割駆動ローラの間に従動ローラを配置したことを特徴とする請求項1又は2に記載のベルト駆動制御装置。
【請求項4】
前記無端ベルトの回転方向の速度を検出する手段を備えたことを特徴とする請求項1、2又は3に記載のベルト駆動制御装置。
【請求項5】
前記各分割駆動ローラにエンコーダを取り付けたことを特徴とする請求項1乃至4のいずれか一項記載のベルト駆動制御装置。
【請求項6】
前記回転速度変更手段は、ベルトの蛇行量と蛇行補正のための分割駆動ローラ回転速度とを対応づけたテーブルから駆動ローラ回転速度差輪郭を作成し、前記分割駆動ローラの目標回転速度を生成することを特徴とする請求項1乃至5のいずれか一項記載のベルト駆動制御装置。
【請求項7】
前記分割駆動ローラ位置と前記蛇行検出器の検出位置を同位置とすることを特徴とする請求項1乃至6のいずれか一項記載のベルト駆動制御装置。
【請求項8】
前記回転速度変更手段が、前記分割駆動ローラ位置と前記検出器の検出位置での蛇行周期の位相差から前記分割駆動ローラ回転速度を生成することを特徴とする請求項1乃至6のいずれか一項記載のベルト駆動制御装置。
【請求項9】
前記無端ベルトにはトナーを付着させて転写紙に転写することを特徴とする請求項1乃至8のいずれか一項記載のベルト駆動制御装置を用いた画像形成装置。
【請求項10】
前記無端ベルトが転写紙を搬送し、感光体ドラム上のトナーを前記転写紙に付着させることを特徴とする請求項1乃至8のいずれか一項記載のベルト駆動制御装置を用いた画像形成装置。
【請求項1】
駆動ローラと従動ローラとから成る複数のローラと、駆動ローラを駆動するモータと、前記複数のローラに張架される無端ベルトと、を備え、モータにより駆動モータを駆動することにより無端ベルトを駆動させるベルト駆動装置において、
前記駆動ローラは、同一軸線上に配置された複数の分割駆動ローラから成ると共に、少なくとも一方の分割駆動ローラを前記モータにより駆動する構成を有し、
前記無端ベルトの蛇行量を検出する蛇行検出器と、蛇行検出器が検出した蛇行量に基づいて前記分割駆動ローラの回転速度の変更値を算出する回転速度変更手段と、回転速度変更手段が算出した制御情報に基づいて前記分割駆動ローラの回転速度を制御する制御手段と、を備えたことを特徴とするベルト駆動制御装置。
【請求項2】
前記複数の分割駆動ローラのうちの一つが前記モータと結合し、他の一つがブレーキと結合することを特徴とする請求項1に記載のベルト駆動制御装置。
【請求項3】
前記複数個の分割駆動ローラの間に従動ローラを配置したことを特徴とする請求項1又は2に記載のベルト駆動制御装置。
【請求項4】
前記無端ベルトの回転方向の速度を検出する手段を備えたことを特徴とする請求項1、2又は3に記載のベルト駆動制御装置。
【請求項5】
前記各分割駆動ローラにエンコーダを取り付けたことを特徴とする請求項1乃至4のいずれか一項記載のベルト駆動制御装置。
【請求項6】
前記回転速度変更手段は、ベルトの蛇行量と蛇行補正のための分割駆動ローラ回転速度とを対応づけたテーブルから駆動ローラ回転速度差輪郭を作成し、前記分割駆動ローラの目標回転速度を生成することを特徴とする請求項1乃至5のいずれか一項記載のベルト駆動制御装置。
【請求項7】
前記分割駆動ローラ位置と前記蛇行検出器の検出位置を同位置とすることを特徴とする請求項1乃至6のいずれか一項記載のベルト駆動制御装置。
【請求項8】
前記回転速度変更手段が、前記分割駆動ローラ位置と前記検出器の検出位置での蛇行周期の位相差から前記分割駆動ローラ回転速度を生成することを特徴とする請求項1乃至6のいずれか一項記載のベルト駆動制御装置。
【請求項9】
前記無端ベルトにはトナーを付着させて転写紙に転写することを特徴とする請求項1乃至8のいずれか一項記載のベルト駆動制御装置を用いた画像形成装置。
【請求項10】
前記無端ベルトが転写紙を搬送し、感光体ドラム上のトナーを前記転写紙に付着させることを特徴とする請求項1乃至8のいずれか一項記載のベルト駆動制御装置を用いた画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2006−30711(P2006−30711A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−210804(P2004−210804)
【出願日】平成16年7月16日(2004.7.16)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月16日(2004.7.16)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]