
ベルト駆動装置、ベルトユニット及び画像形成装置
【課題】外力発生タイミングが未知でも搬送速度変動を抑制し得るベルト駆動装置、ベルトユニット及び画像形成装置を提供する。
【解決手段】複数のローラに張り渡された無端状のベルト90、これを回転駆動する駆動ローラ52、ベルト90を介して加えられた外力を受容する受容ローラ64、少なくとも1個がベルト90の張力に従ってその周内外方向に変位可能に支持された従動ローラ54,102、及びこの内いずれかの回転軸104に相対的に摩擦部材108を押し当てて摩擦力を生じさせ制動すると共に、受容ローラ64の回転を規制する外力を受けた際に、受容ローラ64のベルト90回転方向上流が弛緩し下流が緊張する作用で生ずる、変位可能に支持された従動ローラ102の変位を、回転軸104との摩擦力が弱まる方向への摩擦部材108の相対的な変位に変換する機構を有する制動手段を備えるベルト駆動装置、これを用いたベルトユニット及び画像形成装置。
【解決手段】複数のローラに張り渡された無端状のベルト90、これを回転駆動する駆動ローラ52、ベルト90を介して加えられた外力を受容する受容ローラ64、少なくとも1個がベルト90の張力に従ってその周内外方向に変位可能に支持された従動ローラ54,102、及びこの内いずれかの回転軸104に相対的に摩擦部材108を押し当てて摩擦力を生じさせ制動すると共に、受容ローラ64の回転を規制する外力を受けた際に、受容ローラ64のベルト90回転方向上流が弛緩し下流が緊張する作用で生ずる、変位可能に支持された従動ローラ102の変位を、回転軸104との摩擦力が弱まる方向への摩擦部材108の相対的な変位に変換する機構を有する制動手段を備えるベルト駆動装置、これを用いたベルトユニット及び画像形成装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ベルト駆動装置、ベルトユニット及び画像形成装置に関する。
【背景技術】
【0002】
像保持体の表面に形成されたトナー像を中間転写ベルトの表面に転写した後、該中間転写ベルトと転写ローラとの圧接によるニップ内に記録部材を挿通させてこれに転写する画像形成装置において、中間転写ベルトの速度変動による像保持体から中間転写ベルトへの転写時のトナー像の乱れ、特に多色画像形成装置における色ズレの発生を抑制するべく、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御することで、中間転写ベルトの速度を安定化させる技術がある(例えば、特許文献1、特許文献2参照)。
【0003】
また、特許文献3や特許文献4には、張架ローラに制動力付与手段を設け、用紙投入等の外力の発生タイミングと同期させて、当該外力による負荷変動を相殺するように前記制動力付与手段による制動力をアクティブ制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−24507号公報
【特許文献2】特開平10−232566号公報
【特許文献3】特開2003−270887号公報
【特許文献4】特開2007−286383号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置、及び、画像形成装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題は、以下の<1>〜<14>に示す本発明により達成される。
<1> 複数のローラに張り渡された無端状のベルトと、
前記ローラの1つであって、前記ベルトを回転駆動する駆動ローラと、
前記ローラの他の1つであって、前記ベルトを介して加えられた外力を受容する受容ローラと、
残りの前記ローラであって、前記ベルトに従動して回転し、少なくとも1個が、当該ベルトの張力に従って該ベルトの周内外方向に変位可能に支持された、1個または2個以上の従動ローラと、
該従動ローラの内のいずれかの回転軸に相対的に摩擦部材を押し当てて摩擦力を生じさせることで制動するとともに、前記受容ローラの回転を規制する外力を受けた際に、前記ベルトの回転方向における、前記受容ローラの上流側かつ前記駆動ローラの下流側の領域の当該ベルトが弛緩し、前記受容ローラの下流側かつ前記駆動ローラの上流側の領域の当該ベルトが緊張する作用で生ずる、前記変位可能に支持された従動ローラの変位を、前記回転軸との摩擦力が弱まる方向への当該摩擦部材の相対的な変位に変換する機構を有する制動手段と、
を備えることを特徴とするベルト駆動装置。
【0007】
<2> 前記ベルトの回転方向における前記受容ローラの上流かつ前記駆動ローラの下流の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラが配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、前記変位可能に支持された従動ローラの前記ベルトの周外方向への変位を、前記回転軸と前記摩擦部材との相対的な変位に変換する機構であることを特徴とする<1>に記載のベルト駆動装置。
【0008】
<3> 前記摩擦部材が、前記変位可能に支持された従動ローラに備えられており、
前記制動手段における機構は、前記従動ローラの前記回転軸への前記摩擦部材による摩擦力が、当該変位可能な従動ローラが前記ベルトの張力によりその周内方向に押し込まれる力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする<2>に記載のベルト駆動装置。
【0009】
<4> 前記摩擦部材が、前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側とは反対側から押し当てる位置に前記摩擦部材が配されるとともに、前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする<2>に記載のベルト駆動装置。
【0010】
<5> 前記ベルトの回転方向における前記受容ローラの下流かつ前記駆動ローラの上流の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラが配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、前記変位可能に支持された従動ローラの前記ベルトの周内方向への変位を、前記回転軸と前記摩擦部材との相対的な変位に変換する機構であることを特徴とする<1>に記載のベルト駆動装置。
【0011】
<6> 前記摩擦部材が、前記変位可能に支持された従動ローラに備えられており、
前記制動手段における機構は、前記従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持されるとともに、当該回転軸への前記摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする<5>に記載のベルト駆動装置。
【0012】
<7> 前記摩擦部材が、前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持され、当該回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側から押し当てる位置に前記摩擦部材が配され、当該回転軸への当該摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされるとともに、前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする<5>に記載のベルト駆動装置。
【0013】
<8> 前記ベルトの回転方向における前記受容ローラの上流かつ前記駆動ローラの下流の第1の領域と、前記受容ローラの下流かつ前記駆動ローラの上流の第2の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラがそれぞれ配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、第1の領域に配された前記変位可能に支持された従動ローラの前記ベルトの周外方向への変位を、第1の領域に配された前記摩擦部材を備えた従動ローラにおける前記回転軸と当該摩擦部材との相対的な変位に変換する機構、及び、第2の領域に配された前記変位可能に支持された従動ローラの前記ベルトの周内方向への変位を、第2の領域に配された前記摩擦部材を備えた従動ローラにおける前記回転軸と当該摩擦部材との相対的な変位に変換する機構であることを特徴とする<1>に記載のベルト駆動装置。
【0014】
<9> 第1の領域における前記摩擦部材が、第1の領域に配された前記変位可能に支持された従動ローラに備えられており、
該従動ローラの前記回転軸への前記摩擦部材による摩擦力が、当該変位可能な従動ローラが前記ベルトの張力によりその周内方向に押し込まれる力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする<8>に記載のベルト駆動装置。
【0015】
<10> 第1の領域における前記摩擦部材が、第1の領域に配された前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
第1の領域に配された前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側とは反対側から押し当てる位置に前記摩擦部材が配されるとともに、第1の領域に配された前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする<8>に記載のベルト駆動装置。
【0016】
<11> 第2の領域における前記摩擦部材が、第2の領域に配された前記変位可能に支持された従動ローラに備えられており、
第2の領域に配された前記制動手段における機構は、前記従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持されるとともに、当該回転軸への前記摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする<8>〜<10>のいずれかに記載のベルト駆動装置。
【0017】
<12> 第2の領域における前記摩擦部材が、第2の領域に配された前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
第2の領域に配された前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持され、当該回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側から押し当てる位置に前記摩擦部材が配され、当該回転軸への当該摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされるとともに、第2の領域に配された前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする<8>〜<10>のいずれかに記載のベルト駆動装置。
【0018】
<13> <1>〜<12>のいずれかに記載のベルト駆動装置と、
表面にトナー像を保持し前記ベルトの外周面に接触して配置される像保持体に対向する位置に、前記ベルトの内周面側に設けられた転写手段と、
を備え、
前記像保持体表面のトナー像が、前記転写手段によって前記ベルトの外周面に転写されるように構成されてなることを特徴とするベルトユニット。
【0019】
<14> 像保持体と、該像保持体表面にトナー像を形成するトナー像形成手段と、複数のローラに張り渡された無端状の中間転写ベルトと、該中間転写ベルトの外周面に前記像保持体表面に形成されたトナー像を転写する一次転写手段と、前記複数のローラの内の1つに前記中間転写ベルトを挟んで転写ローラが押し当てられて、前記中間転写ベルトの外周面に形成されたトナー像を外部から供給される記録媒体に転写する二次転写手段と、を備え、
前記複数のローラの内、前記中間転写ベルトを挟んで前記転写ローラが圧接されるローラを受容ローラ、他の1つを駆動ローラ、残りのローラを従動ローラとする<1>〜<12>のいずれかに記載のベルト駆動装置によって前記中間転写ベルトを無端状のベルトとして駆動することを特徴とする画像形成装置。
【発明の効果】
【0020】
<1>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0021】
<2>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0022】
<3>にかかる発明によれば、本構成を具備しない場合に比べて、簡易な構成で、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0023】
<4>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0024】
<5>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0025】
<6>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0026】
<7>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0027】
<8>にかかる発明によれば、第1の領域と第2の領域の一方にのみ制動手段を備える場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0028】
<9>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0029】
<10>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0030】
<11>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0031】
<12>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動をより一層抑制し得るベルト駆動装置を提供することができる。
【0032】
<13>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルトユニットを提供することができる。
【0033】
<14>にかかる発明によれば、本構成を具備しない場合に比べて、受容ローラと転写ローラとの間への記録媒体の進入や排出により中間転写ベルトに外力が加えられた場合にも像の乱れの少ない画像を形成し得る画像形成装置を提供することができる。
【図面の簡単な説明】
【0034】
【図1】本発明のベルト駆動装置を適用可能なタンデム型のカラー画像形成装置の一例を示す概略構成図である。
【図2】図1中の各作像ユニットの概略構成図である。
【図3】外力を受けた際の図1に示す画像形成装置の搬送系における作用を説明するための、搬送系のみを抜き出した概略構成図である。
【図4】本発明の例示的一態様である第1の実施形態のベルト駆動装置を示す概略構成図である。
【図5】図4に示す第1の実施形態のベルト駆動装置において、受容ローラの回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。
【図6】図4に示す第1の実施形態のベルト駆動装置において、受容ローラの回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。
【図7】図4に示す第1の実施形態のベルト駆動装置における制動手段の摩擦部材と制動変位ローラの回転軸との位置関係を説明するための説明図であり、(a)は定常状態、(b)は制動力が弱まった状態、(c)は制動力が強まった状態、(d)は両者が離間した状態を表すものである。
【図8】図4に示す第1の実施形態のベルト駆動装置における制動変位ローラ周辺の拡大図である。
【図9】本発明の例示的一態様である第2の実施形態のベルト駆動装置を示す概略構成図である。
【図10】図9に示す第2の実施形態のベルト駆動装置において、受容ローラの回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。
【図11】図9に示す第2の実施形態のベルト駆動装置において、受容ローラの回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。
【図12】本発明の例示的一態様である第3の実施形態のベルト駆動装置を示す概略構成図である。
【図13】図12に示す第3の実施形態のベルト駆動装置における制動変位ローラ周辺の矢印G方向から見た拡大図である。
【図14】図12に示す第3の実施形態のベルト駆動装置において、受容ローラの回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。
【図15】図12に示す第3の実施形態のベルト駆動装置において、受容ローラの回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。
【図16】本発明の例示的一態様である第4の実施形態のベルト駆動装置を示す概略構成図である。
【図17】図16に示す第4の実施形態のベルト駆動装置における制動変位ローラ周辺の矢印H方向から見た拡大図である。
【図18】図16に示す第4の実施形態のベルト駆動装置において、受容ローラの回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。
【図19】図16に示す第4の実施形態のベルト駆動装置において、受容ローラの回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。
【発明を実施するための形態】
【0035】
以下、本発明のベルト駆動装置を適用可能な画像形成装置を例示した上で、本発明のベルト駆動装置の実施形態を挙げて詳細に説明する。
【0036】
[1.画像形成装置の実施形態]
図1は、本発明のベルト駆動装置を適用可能な画像形成装置の一例としてのタンデム型のカラー画像形成装置を示す概略構成図である。ただし、図1において、本発明に特徴的な構成は描かれていない。この画像形成装置は、基本構成として、電子写真方式により画像情報に基づくイエロー(Y)、マゼンタ(M)、シアン(C)、ブラック(K)の各色成分の未定着トナー画像をそれぞれ形成する4つの作像ユニット48Y,48M,48C,48Kと、この各作像ユニット48(48Y,48M,48C,48K)で形成される各未定着トナー画像が積層転写される中間転写ベルト90と、この中間転写ベルト90の表面に積層転写された未定着トナー画像を記録媒体の一例である用紙68に転写する二次転写装置60と、未定着トナー画像が転写された用紙68を熱及び圧力により定着させる定着装置62と、から基本的に構成されている。図中の矢付一点鎖線は、用紙68の搬送経路を示す。用紙68は、給紙部(図示省略)から1枚ずつ供給されるようになっている。
【0037】
作像ユニット48Y、48M、48C、48Kは、水平方向にそって一定の間隔をあけた並列状態で配設されており、そのいずれも同様の構成からなるものである。
【0038】
図2は、これら各作像ユニット48(48Y,48M,48C,48K)の概略構成図である。作像ユニット48は、基本構成として、一様帯電後に像光を照射することにより表面に潜像が形成される円筒状の感光体ドラム2を備えており、この感光体ドラム2の周囲に、感光体ドラム2の表面を一様に帯電させる帯電装置4と、感光体ドラム2に像光を照射して表面に潜像を形成する露光装置6と、感光体ドラム2表面の潜像にトナーを選択的に転移させてトナー画像を形成する現像装置8と、感光体ドラム2表面に形成されたトナー画像を中間転写ベルト90に転写する一次転写手段の一例である一次転写装置14と、感光体ドラム2表面に残留したトナーを回収するクリーニング装置22と、感光体ドラム2表面に残留した電位を除去する除電ランプ12を備える。
【0039】
感光体ドラム2は、像保持体の一例であり、全体としてドラム状に形成されたもので、その外周面(ドラム表面)に感光層を有している。この感光体ドラム2は図2の矢印A方向に回転可能に設けられている。
【0040】
感光体ドラム2は、少なくとも潜像(静電荷像)が形成される機能を有する。静電潜像保持体としては、電子写真感光体が好適なものとして挙げられる。感光体ドラム2は、円筒状の導電性の基体外周面に有機感光層等を含む感光層が形成されてなる。この感光層は一般的に、基体表面に必要に応じて下引き層が形成され、さらに電荷発生物質を含む電荷発生層と、電荷輸送物質を含む電荷輸送層とがこの順序で形成されたものである。電荷発生層と電荷輸送層の積層順序は逆であってもよい。
【0041】
これらは、電荷発生物質と電荷輸送物質とを別個の層(電荷発生層、電荷輸送層)に含有させて積層した積層型感光体であるが、電荷発生物質及び電荷輸送物質の両方を同一の層に含む単層型感光体であってもよく、好ましくは積層型感光体である。また、下引き層と感光層との間に中間層を有していてもよい。また、有機感光層に限らずアモルファスシリコン感光膜等他の種類の感光層を使用してもよい。
【0042】
帯電装置4は、感光体ドラム2の表面を一様に帯電するものである。帯電装置4としては、例えば、導電性または半導電性の接触型帯電器である帯電ローラが用いられるが、コロトロンなどの非接触型帯電器を用いてもよい。帯電ローラを用いた場合には、感光体ドラム2に対し、直流電流を印加するか、交流電流を重畳させて印加してもよい。このような帯電装置4により、感光体ドラム2との接触部近傍の微小空間で放電を発生させることにより感光体ドラム2表面を帯電させる。
【0043】
帯電手段によって感光体ドラム2の表面は、通常、−300V〜−1000Vに帯電される。また、前記の導電性または半導電性の帯電ローラは単層構造あるいは多重構造でもよい。さらに、帯電ローラの表面をクリーニングする機構を設けてもよい。
【0044】
露光装置6は、帯電装置4によって一様に帯電された感光体ドラム2に像様の光Xを照射することにより、静電潜像を形成するものである。露光装置6としては、特に制限はなく、例えば、静電潜像保持体表面に、半導体レーザ光、LED光、液晶シャッター光等の光源を、所望の像様に露光する光学系機器等が挙げられる。
【0045】
現像装置8は、静電潜像保持体上に形成された潜像を、トナーを含む現像剤により現像してトナー像を形成する機能を有するものである。現像装置8としては、上述の機能を有している限り特に制限はなく、目的に応じて適宜選択すればよいが、例えば、静電荷像現像用のトナーと磁性キャリアとを含む二成分現像剤が収容され、当該磁性キャリアによって形成された磁気ブラシにより、トナーを感光体ドラム2に付着させる現像器等が挙げられる。現像の際、感光体ドラム2には、通常直流電圧が使用されるが、さらに交流電圧を重畳させて使用してもよい。
作像ユニット48Yの現像装置8にはイエロートナー、作像ユニット48Mの現像装置8にはマゼンタトナー、作像ユニット48Cの現像装置8にはシアントナー、作像ユニット48Kの現像装置8にはブラックトナーが、それぞれ収容される。
【0046】
一次転写装置14は、感光体ドラム2との間で中間転写ベルト90を挟持しつつ、感光体ドラム2表面に形成されたトナー像を無端状の中間転写ベルト90の外周面に転写(一次転写)するものである。
【0047】
一次転写装置14としては、例えば、中間転写ベルト90の裏側からトナー像のトナーとは逆極性の電荷を与え、静電気力によりトナー像を中間転写ベルト90表面に転写するもの、あるいは中間転写ベルト90の裏面に直接接触して転写する導電性または半導電性のローラ等を用いた転写ローラ及び転写ローラ押圧装置を用いればよい。
【0048】
転写ローラには、感光体ドラム2に付与する転写電流として、直流電流を印加してもよいし、交流電流を重畳させて印加してもよい。転写ローラは、帯電すべき画像領域幅、転写帯電器の形状、開口幅、周速等に応じて、各種条件乃至諸元を適宜設定すればよい。また、低コスト化のため、転写ローラとして単層の発泡ローラ等が好適に用いられる。
【0049】
クリーニング装置22は、転写後に感光体ドラム2表面に残ったトナー等をクリーニング(除去)するものである。クリーニング装置22としては、本例においてはブレードクリーニング方式を採用しているが、感光体ドラム2表面の残留トナーを清掃し得るものであれば、ブラシクリーニング方式、ローラクリーニング方式を採用したもの等、適宜選定して差し支えない。これらの中でもクリーニングブレードを用いることが好ましい。クリーニングブレードの材質としてはウレタンゴム、ネオプレンゴム、シリコーンゴム等が挙げられる。中でも、耐摩耗性に優れていることから、特にポリウレタン弾性体を用いることが好ましい。
【0050】
なお、転写効率の高いトナーを使用する場合には、クリーニング装置22が省略された態様であっても構わない。
【0051】
それぞれの作像ユニット48において、感光体ドラム2表面が、帯電装置4によって一様に帯電され、露光装置6で画像情報に基づくイエロー(Y)、マゼンタ(M)、シアン(C)、ブラック(K)の各色成分の潜像が形成され、これに応じてそれぞれの色のトナーが収容された現像装置8により未定着トナー画像が各感光体ドラム2に形成される(作像ユニット48における感光体ドラム2を除く以上の構成が、本発明に言う「トナー像形成手段」の一例に相当する。)。それぞれの感光体ドラム2表面に形成された各色の未定着トナー像は、一次転写装置14によって順次中間転写ベルト90の表面に積層転写される構成となっている。
【0052】
中間転写ベルト90は、図示しない回転駆動源により回転駆動する駆動ローラ52と、従動回転して中間転写ベルト90を支持する支持ローラ54と、二次転写装置60における受容ローラ64と、図1においては不図示の後述する1個または2個以上の従動ローラと、からなる複数のローラに張り渡されるとともに、駆動ローラ52と支持ローラ54との間で、前記各作像ユニット48における感光体ドラムの一次転写位置を通過する状態で配設されている。中間転写ベルト90は駆動ローラ52によって矢印B方向に周動回転する。
【0053】
なお、公知の如く、中間転写ベルト90に一定の張力(テンション)を与えるためのテンションローラを備える場合、当該テンションローラも中間転写ベルト90の張り渡しに資する。本実施形態においても、所望の張力を与えるためにテンションローラを備えることが好ましいが、図面上は省略する。本発明において、当該テンションローラも、「従動ローラ」の1つを構成する。ただし、当該テンションローラが、その他の機能を有していても構わない。以降の説明において、テンションローラについての説明は割愛する。
【0054】
中間転写ベルト90としては、特に制限はなく、従来公知のものが問題なく使用可能であるが、例えば、ベルト基材表面に表面層を積層形成した2層構造のものが使用される。
【0055】
中間転写ベルト90に用いられる材料としては、ポリカーボネート樹脂(PC)、ポリフッ化ビニリデン(PVDF)、ポリアルキレンフタレート、PC/ポリアルキレンテレフタレート(PAT)のブレンド材料、エチレンテトラフロロエチレン共重合体(ETFE)/PC、ETFE/PAT、PC/PATのブレンド材料等が挙げられるが、機械的強度の観点から熱硬化ポリイミド樹脂を用いた中間転写ベルトが好ましい。
【0056】
二次転写装置60は、中間転写ベルト90を挟むような状態で対向配設される受容ローラ64と二次転写ローラ66とでその主要部が構成されている。この二次転写ローラ66と中間転写ベルト90との間に形成されるニップ部に用紙68を挿通し、静電的作用を施すことで、中間転写ベルト90表面の未定着トナー画像を用紙68表面に転写するように構成されている。二次転写装置60としては、特に制限はなく、従来公知の構成を問題なく採用することができる。具体的には、既述の一次転写装置14と同様の構成の物を適用することができる。
【0057】
また、定着装置62は、記録媒体に転写されたトナー像を加熱、加圧あるいは加熱加圧等より定着するものである。本実施形態のような2ローラ方式の他、加熱側または加圧側がベルト状で他方がローラ状のベルト−ローラニップ方式、加熱側及び加圧側の双方ともベルト状の2ベルト方式等が挙げられる。ベルトについては、複数のローラでベルトを張架する方式の他、ベルトを張架せずに用いるフリーベルト方式も挙げられる。本発明においては、いずれの方式の定着装置であっても構わない。
【0058】
トナー像が転写されて最終的な記録画像が形成される用紙68としては、例えば、電子写真方式の複写機、プリンタ等に使用される普通紙、OHPシート等が挙げられる。定着後における画像表面の平滑性をさらに向上させるには、記録媒体の表面もできるだけ平滑であることが好ましく、例えば、普通紙の表面を樹脂等でコーティングしたコート紙、印刷用のアート紙等を好適に使用される。
【0059】
このような基本構成からなる本実施形態の画像形成装置では、次のようにしてカラー画像の形成が行われる。
【0060】
まず、各作像ユニット48において、各感光体ドラムに形成される4色の未定着トナー画像が、一次転写装置14の静電的な転写作用により中間転写ベルト90の表面に重ね合わせられるようにして順次一次転写される。
【0061】
中間転写ベルト90に転写されて担持された未定着トナー画像は、そのベルトの回転に伴って二次転写装置60を通過するように搬送されることにより用紙68に転写される。すなわち、中間転写ベルト90表面の未定着トナー画像は、受容ローラ64と二次転写ローラ66との間のニップ部に中間転写ベルト90とともに挿通される用紙68に接した状態で静電的に転写される。
【0062】
トナー画像が転写された用紙68は、二次転写装置60から排出されると、搬送ガイド58を経由して定着装置62により定着され、その後、系外に排出される。その結果、用紙68の片面に対してフルカラー画像が形成される。
【0063】
以上の如き、画像形成装置において、矢付一点鎖線に示されるように用紙68が二次転写装置60に進入する際、その厚みに基づく抵抗により、中間転写ベルト90の矢印B方向への搬送、並びに、受容ローラ64の回転が規制される。すなわち、用紙68として厚紙の進入は、本画像形成装置の搬送系に対して、受容ローラ64の回転を規制する外力となる。この外力は、用紙68が厚いほど、大きい傾向にある。
【0064】
このような外力を受けた際の本画像形成装置の搬送系における作用を、図3を用いて説明する。図3は、図1に示す画像形成装置における搬送系のみを抜き出した概略構成図である。矢印C1方向から、二次転写ローラ66と中間転写ベルト90を挟んで対向配設される受容ローラ64との間に用紙68が進入する際(図1参照)、その厚みに基づく抵抗を受けるため、中間転写ベルト90の矢印B方向への搬送、並びに、受容ローラ64の回転が規制される。
【0065】
受容ローラ64の回転が規制される中、駆動ローラ52はそのままの速度で回転駆動を続けるため、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側の第1の領域D及び第1の領域D’において、中間転写ベルト90が弛緩し、受容ローラ64の下流側であって駆動ローラ52の上流側の第2の領域Eにおいて、中間転写ベルト90が緊張する。
【0066】
一方、矢印C2方向へ、二次転写ローラ66と中間転写ベルト90を挟んで対向配設される受容ローラ64との間から用紙68が排出される際(図1参照)、その厚みのため二次転写ローラ66と受容ローラ64との間が離間していたところ、排出と同時に両者間に空隙が生じてすぐに接触するが、その僅かの間に、中間転写ベルト90の矢印B方向への搬送、並びに、受容ローラ64の回転が促進される。
【0067】
受容ローラ64の回転が促進される中、駆動ローラ52はそのままの速度で回転駆動を続けるため、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側の第1の領域D及び第1の領域D’において、中間転写ベルト90が緊張し、受容ローラ64の下流側であって駆動ローラ52の上流側の第2の領域Eにおいて、中間転写ベルト90が弛緩する。
【0068】
この中間転写ベルト90の搬送速度の変動は、各作像ユニット48における感光体ドラムの一次転写位置でのトナー像の転写に影響し、像の乱れや色ズレの原因になる。
【0069】
本実施形態の画像形成装置においては、予め制動手段によって制動力が加えられた従動ローラを中間転写ベルト90の張り渡しに供しておき、その従動ローラまたはそれとは別の従動ローラを中間転写ベルト90の周内外方向に変位可能に支持した上で、用紙68が二次転写装置60に進入する際の、受容ローラ64の回転を規制する外力によって上記弛緩あるいは緊張する作用で生ずる、前記変位可能に支持された従動ローラの変位を、前記回転軸との摩擦力が弱まる方向への当該摩擦部材の相対的な変位に変換する機構(当該機構を以下「制動制御機構」と称する場合がある。)を制動手段が備えることで、外力による影響を緩和している。
【0070】
当該制動制御機構を備えることによって、進入した用紙68が二次転写装置60から排出される際の、受容ローラ64の回転を促進する外力によって上記弛緩あるいは緊張する作用で生ずる、前記変位可能に支持された従動ローラの変位は、前記制動手段における前記回転軸への押圧力が強まるように自動的に制御され、外力による影響が緩和される(以上のベルト駆動装置の作用の詳細については、[2.ベルト駆動装置の実施形態]の項を参照)。
【0071】
このように、本実施形態の画像形成装置では、厚みのある記録媒体を用いた場合にも、その投入時や排出時に外力が加わることによる中間転写体の速度変動が抑制されて、像の乱れや色ズレの少ない画像を形成することができる。
【0072】
外力によって中間転写ベルト90が緊張あるいは弛緩する作用を利用することから、制動制御機構は、第1の領域D,D’及び第2の領域Eのいずれか(または双方)に備えられればよいが、本実施形態の画像形成装置においては、第1の領域D’にはタンデム状に作像ユニット48が配置されているため、実質的には第1の領域D’に設けることはできない。よって、かかる制動制御機構は、本実施形態において、第1の領域D及び第2の領域Eのいずれか(または双方)に備えられる。
【0073】
[2.ベルト駆動装置の実施形態]
以下、上記画像形成装置の実施形態における第1の領域D及び第2の領域Eのそれぞれに制動制御機構が備えられた態様をそれぞれ2つずつ例示し、本発明のベルト駆動装置の好ましい実施形態を挙げて、本発明を具体的に説明する。
【0074】
(第1の実施形態)
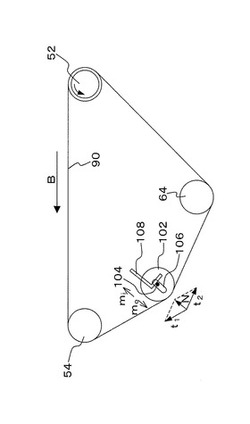
図4に、本発明の例示的一態様である第1の実施形態のベルト駆動装置の概略構成図を示す。図4は、図1に示す画像形成装置における搬送系のみを抜き出し、これに本実施形態に特有の構成を加えたものである。本実施形態は、図1の画像形成装置における第1の領域Dに制動制御機構を備えた例である。
【0075】
中間転写ベルト90は、駆動ローラ52と、従動ローラの一例である支持ローラ54及び制動変位ローラ102と、受容ローラ64と、からなる複数のローラに張り渡されている。
【0076】
制動変位ローラ102は、軸方向両側から突出する回転軸104が、装置筺体に固定された不図示のガイドに設けられた長孔106内に挿し込まれ、中間転写ベルト90の周内mi方向及び周外mo方向に変位可能に支持されている。また、制動変位ローラ102には、両側の回転軸104が、装置筺体に固定された摩擦部材108に押し当てて摩擦力を生じさせることで、制動力が加えられる構成の制動手段が備えられている。
【0077】
制動変位ローラ102に巻き付いた部位の中間転写ベルト90には、回転方向(矢印B方向)上流側に生ずる張力t1及び下流側に生ずる張力t2が作用しており、それらが合成した垂直力として、周内方向に押し込まれる力Nが制動変位ローラ102に作用している。
【0078】
回転軸104を摩擦部材108に押し当てることで生じる摩擦力は、制動変位ローラ102が中間転写ベルト90の張力によりその周内方向に押し込まれる力Nによってもたらされる、
以上のように、本実施形態における制動制御機構が構成されている。
【0079】
本実施形態のベルト駆動装置は、駆動ローラ52の回転駆動によって中間転写ベルト90が矢印B方向に回転する。この時、制動変位ローラ102に備えられた摩擦部材108等からなる制動手段によって、中間転写ベルト90の回転には、予め制動力が付与されており、当該制動力とそれよりも大きな力の駆動ローラ52による回転駆動力とが適切にバランスされて、一定の搬送力で中間転写ベルト90が矢印B方向に回転している。
【0080】
この状態で、二次転写装置60における受容ローラ64と二次転写ローラ66との間に用紙68が矢印C1に示すように進入する(図1、図3参照)等、受容ローラ64の回転を規制する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する制動変位ローラ102の前後において、張力t1及び張力t2の低下が起こり、その合成力である垂直力Nも低下して、図5に示すように中間転写ベルト90が弛緩する。
【0081】
ここで、図5は、本実施形態のベルト駆動装置において、受容ローラ64の回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。図5中の点線は、外力を受ける前の各部材の位置を示すものである。
【0082】
中間転写ベルト90の弛緩によって、回転軸104が長孔106内を移動して、制動変位ローラ102が周外mo方向に変位する。制動変位ローラ102の周外mo方向への変位は、前記制動手段における回転軸104との間の摩擦力が弱まる方向への摩擦部材108の相対的な変位に相当する。そのため、本実施形態では、受容ローラ64の回転を規制する外力を受けることで、制動変位ローラ102に備えられた制動手段によって付与されていた制動力が、弱まるように構成されている。
【0083】
「回転を規制する」とは、すなわち、回転による駆動力を制動することであり、本実施形態においては、受容ローラ64にこの制動力が作用したと同時に、制動変位ローラ102に予め加えられていた摩擦部材108による摩擦力に基づく制動力が弱められる。この両制動力をバランスさせることで、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0084】
一方、本実施形態の構成によれば、二次転写装置60における受容ローラ64と二次転写ローラ66との間に進入した用紙68が矢印C2に示すように排出される(図1、図3参照)等、受容ローラ64の回転を促進する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する制動変位ローラ102の前後において、張力t1及び張力t2の上昇が起こり、その合成力である垂直力Nも上昇して、図6に示すように中間転写ベルト90が緊張する。
【0085】
ここで、図6は、本実施形態のベルト駆動装置において、受容ローラ64の回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。図6中の点線は、外力を受ける前の各部材の位置を示すものである。
【0086】
中間転写ベルト90の緊張によって、回転軸104が長孔106内を移動して、制動変位ローラ102が周内mi方向に変位する。制動変位ローラ102の周内mi方向への変位は、前記制動手段における回転軸104との摩擦力が強まる方向への摩擦部材108の相対的な変位に相当する。そのため、本実施形態では、受容ローラ64の回転を促進する外力を受けることで、制動変位ローラ102に備えられた制動手段によって付与されていた制動力が、強まるように構成されている。
【0087】
「回転を促進する」とは、すなわち、回転による駆動力を高めることであり、本実施形態においては、受容ローラ64にこの駆動力を高める作用が生じたと同時に、制動変位ローラ102に予め加えられていた制動力が高められる。本実施形態によれば、この駆動力の向上と制動力の上昇分とが自動的にバランスされるため、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0088】
以上のように、本実施形態のベルト駆動装置によれば、予め外力の発生タイミングがわかっていない場合であっても、外力発生に伴う張力の変動を直接利用して制動力の増減に反映させているため、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御する場合に比べて、タイミングの遅れが生じ難く、精度よく外力によるベルト搬送速度の変動を抑制することができる。しかも、受容ローラ64の回転を規制する外力のみならず、該回転を促進する外力に対しても、その影響を抑えることができる。
【0089】
また、電気的な検知システムや電子制御によらず、メカニカル(機械的)な構成で実現可能のなので、低コストで目的を達成することができる。
【0090】
さらに、フライホイールのような大型の部材を使わなくても、レイアウト上の制約が少ない小型な構成で実現可能である。
【0091】
なお、図5及び図6においては、図示の便宜と説明の容易化を図る意図で、制動変位ローラ102の変位を若干大袈裟に描いている。即ち、図5においては、回転軸104が摩擦部材108と大きく離間した状態に変位しており、図6においては、回転軸104が摩擦部材108にめり込んだ状態に変位している。しかし、摩擦部材108が回転軸104に押し当てて摩擦力を生じさせることにより生ずる制動力は、その押し当てる力が変化することで増減するため、接触状態のまま微視的に変位することで変動する。
【0092】
図7は、摩擦部材108と回転軸104との位置関係を説明するための説明図であり、両者のみが拡大されて描かれている。図7(a)は定常状態であり、回転軸104が摩擦部材108に微視的に食い込んだ状態になっている。受容ローラ64が外力を受けることで中間転写ベルト90が弛緩乃至緊張すると、回転軸104が周外mo方向乃至周内mi方向に変位する。図7(b)は回転軸104が周外mo方向に変位し、摩擦部材108の回転軸104に対する摩擦力が低下して、制動力が弱まった状態を、図7(c)は回転軸104が周外mi方向に変位し、回転軸104が摩擦部材108に微視的により食い込み摩擦力が上昇して、制動力が強まった状態を、それぞれ示すものである。
【0093】
このように摩擦部材108と回転軸104とが接触状態のままの微視的な変位であっても、両者間に生ずる摩擦力が変化する限り、本発明に言う「摩擦部材の相対的な変位」に含まれる概念である。したがって、本発明において、変位が目視によって観測できることは要求されない。
【0094】
なお、図7(d)に示されるように、回転軸104と摩擦部材108とが完全に離間して、摩擦部材108による制動力が作用しなくなった状態になる変位も、図7(a)の定常状態に対して両者間に生ずる摩擦力がゼロへと変化しているのであり、勿論本発明における「摩擦部材の相対的な変位」の一態様と解される。これらの変位が適切に生ずることによって、摩擦部材108による制動力が良好に制御されるように、変位の程度を適宜調整してやればよい。
【0095】
図8に、図4に示された本実施形態のベルト駆動装置における制動変位ローラ102周辺の拡大図を示す。制動変位ローラ102の回転軸104は、中間転写ベルト90の張力t1及び張力t2が作用して生ずる垂直力Nによって摩擦部材108に押し付けられており、摩擦部材108と回転軸104との間には摩擦力Fが生じ、中間転写ベルト90の矢印B方向への駆動力抑制する制動力bになる。定常状態における摩擦力F0は、ベルト張力T0(=t1=t2)の関数として以下のように表される。
F0=μN=2T0μsinθ
【0096】
ここでNは、中間転写ベルト90の張力t1及び張力t2が作用して生ずる摩擦部材108に生じる垂直力、θは中間転写ベルト90の張り渡し角度、μは摩擦係数であり、定常状態ではこの摩擦力F0が負荷として常に中間転写ベルト90に作用している。
【0097】
受容ローラ64の回転を規制する外力を受けた際の中間転写ベルト90の弛緩によって、中間転写ベルト90の張力がT0−ΔTに減少したとすると、それに伴って摩擦部材108と回転軸104との間の摩擦力Fも、以下のように減少する。
F0−ΔF=2(T0−ΔT)μsinθ
(ΔF=2ΔTμsinθ)
【0098】
以上より、張り渡し角度θを調整することで、外力負荷の大きさに応じた制動力の変動量を調整することができる。本願発明による制動制御の作用を有効に生じさせるには、張り渡し角度θをある程度確保することが望まれるが、θ>0であれば理論上当該作用を生じさせることができる。
【0099】
張り渡し角度θの好ましい範囲は、その他の装置構成や条件(摩擦部材の材質や構成、中間転写ベルトの張力、受容ローラが受ける外力の大きさ、装置の大きさ、中間転写ベルトの取り回しの自由度等)によって異なるため、一概には言えない。これら装置構成や条件を勘案しつつ、上記式による摩擦力Fの変動メカニズムを参考に、適切な張り渡し角度θを適宜設計すればよい。ベルトの張り渡し角度の考え方については、後述する第3の実施形態においても同様である。
【0100】
なお、制動変位ローラ102や摩擦部材108の代わりに、ブレードのような固定部材を用いて直接中間転写ベルト90に制動力を加えること構成も考えられるが、上記の如くベルト張架角度θをある程度大きくすることが求められることもあり、中間転写ベルト90に大きな接触力が働くため、中間転写ベルト90の傷や磨耗が避けられない。これに対して、本実施形態では、従動ローラの回転軸に制動力を加えて間接的にベルトを制動するので、固定部材を用いて直接中間転写ベルト90に制動力を加える場合に比べて中間転写ベルト90へのダメージを少なくできる。
【0101】
摩擦部材108の材料としては、通常ブレーキパッドとして用いられる、天然ゴム、合成ゴム、シリコーンゴムを含む各種ゴム材料やエラストマー等の弾性材料、シリコーン樹脂を含む各種樹脂材料や各種金属材料等の硬質材料から適宜選択して用いればよい。
【0102】
また、本実施形態においては、制動変位ローラ(従動ローラ)102の回転軸104の変位の方向(周外mo周内mo方向)に対して、平面状の摩擦部材108の接触面が垂直に接触するように構成されているが、摩擦部材は、必ずしも垂直に接触する必要は無く、ある程度の傾きを持たせても構わない。摩擦部材に傾きを持たせることで、変位による摩擦力変化を漸次的に増減させることも可能となり、制動制御のラチチュードを広く取ることができる場合がある。
【0103】
以上説明した従動ローラの回転軸と制動手段の摩擦部材との関係や張り渡し角度θ、それらの態様、材質等は、本実施形態に限らず、後述する他の実施形態全てに適用し得るものである。そのため、以降の実施形態においては、これらの説明を一部省略する。
【0104】
(第2の実施形態)
図9に、本発明の例示的一態様である第2の実施形態のベルト駆動装置の概略構成図を示す。図9は、図1に示す画像形成装置における搬送系のみを抜き出し、これに本実施形態に特有の構成を加えたものである。本実施形態は、図1の画像形成装置における第1の領域Dに制動制御機構を備えた例である。
【0105】
中間転写ベルト90は、駆動ローラ52と、従動ローラの一例である支持ローラ54、変位ローラ212及び制動ローラ222と、受容ローラ64と、からなる複数のローラに張り渡されている。
【0106】
変位ローラ212は、軸方向両側から突出する回転軸214が、装置筺体に固定された不図示のガイドに設けられた長孔216内に挿し込まれ、中間転写ベルト90の周内mi方向及び周外mo方向に変位可能に支持されている。
【0107】
回転軸214には連結部材232の一端が回転軸214の回転自由度を損なわないように結合され、回転軸214のmi方向及びmo方向の変位が、連結部材232の他端に回転自在に結合した長尺体230の一端に伝達されるように構成されている。長尺体230はその中途に、回転自在に装置筺体に固定された支点234を有し、梃子の作用を具備している。梃子の作用を具備する長尺体230の他端には、摩擦部材228が取り付けられ、制動ローラ222の軸方向両側から突出する回転軸224を押し当てて摩擦力を生じさせることで制動力が加えられるように構成されている。制動ローラ222の回転軸224における、制動ローラ222に巻き付いた中間転写ベルト90に面する側とは反対側から押し当てる位置に摩擦部材228が配されるように、長尺体230が取り回される。
【0108】
回転軸214のmi方向及びmo方向の変位に基づく長尺体230の一端の動きは、梃子の作用によって、支点234を超えた位置では反対方向への動きに変換される。そして、その動きによって、摩擦部材228が回転軸224に対して変位する。
【0109】
変位ローラ212に巻き付いた部位の中間転写ベルト90には、回転方向(矢印B方向)上流側及び下流側に生ずる張力が作用しており、それらが合成した垂直力として、周内方向に押し込む力が変位ローラ212に作用している。この作用によって、連結部材232及び長尺体230を介して、摩擦部材228が所定の力で回転軸224に押し当てられている。
以上のように、本実施形態における制動制御機構が構成されている。
【0110】
本実施形態のベルト駆動装置は、駆動ローラ52の回転駆動によって中間転写ベルト90が矢印B方向に回転する。この時、制動ローラ222に備えられた摩擦部材228等からなる制動手段によって、中間転写ベルト90の回転には、予め制動力が付与されており、当該制動力とそれよりも大きな力の駆動ローラ52による回転駆動力とが適切にバランスされて、一定の搬送力で中間転写ベルト90が矢印B方向に回転している。
【0111】
この状態で、二次転写装置60における受容ローラ64と二次転写ローラ66との間に用紙68が矢印C1に示すように進入する(図1、図3参照)等、受容ローラ64の回転を規制する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する変位ローラ212の前後において、中間転写ベルト90の張力低下が起こり、図10に示すように中間転写ベルト90が弛緩する。
【0112】
ここで、図10は、本実施形態のベルト駆動装置において、受容ローラ64の回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。図10中の点線は、外力を受ける前の各部材の位置を示すものである。
【0113】
中間転写ベルト90の弛緩によって、回転軸214が長孔216内を移動して、変位ローラ212が周外mo方向に変位する。変位ローラ212の周外mo方向への変位は、連結部材232により、長尺体230の力点に当たる一端に伝達され、当該一端が矢印m1方向へ動く。すると、長尺体230の作用点である他端は矢印m2方向へ動き、前記制動手段における回転軸224との間の摩擦力が弱まる方向への摩擦部材228の相対的な変位となる。そのため、本実施形態では、受容ローラ64の回転を規制する外力を受けることで、制動ローラ222に備えられた制動手段によって付与されていた制動力が、弱まるように構成されている。
【0114】
本実施形態においては、受容ローラ64に外力による制動力が作用したと同時に、制動ローラ222に予め加えられていた制動力が弱められる。この両制動力をバランスさせることで、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0115】
一方、本実施形態の構成によれば、二次転写装置60における受容ローラ64と二次転写ローラ66との間に進入した用紙68が矢印C2に示すように排出される(図1、図3参照)等、受容ローラ64の回転を促進する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する変位ローラ212の前後において、中間転写ベルト90の張力上昇が起こり、図11に示すように中間転写ベルト90が緊張する。
【0116】
ここで、図11は、本実施形態のベルト駆動装置において、受容ローラ64の回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。図11中の点線は、外力を受ける前の各部材の位置を示すものである。
【0117】
中間転写ベルト90の緊張によって、回転軸214が長孔216内を移動して、変位ローラ212が周内mi方向に変位する。変位ローラ212の周内mi方向への変位は、連結部材232により長尺体230の一端に伝達され、当該一端が矢印m3方向へ動く。すると、長尺体230の他端は矢印m4方向へ動き、前記制動手段における回転軸224との摩擦力が強まる方向への摩擦部材228の相対的な変位となる。そのため、本実施形態では、受容ローラ64の回転を促進する外力を受けることで、制動ローラ222に備えられた制動手段によって付与されていた制動力が、強まるように構成されている。
【0118】
本実施形態においては、受容ローラ64に駆動力を高める作用が生じたと同時に、制動ローラ222に予め加えられていた制動力が高められる。本実施形態によれば、これら駆動力の向上と制動力の上昇分とが自動的にバランスされるため、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0119】
なお、図10及び図11において、図示の便宜と説明の容易化を図る意図で、変位ローラ212の変位を若干大袈裟に描いているのは、第1の実施形態における図5及び図6と同様である。
【0120】
以上のように、本実施形態のベルト駆動装置によれば、予め外力の発生タイミングがわかっていない場合であっても、外力発生に伴う張力の変動を直接利用して制動力の増減に反映させているため、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御する場合に比べて、タイミングの遅れが生じ難く、精度よく外力によるベルト搬送速度の変動を抑制することができる。しかも、受容ローラ64の回転を規制する外力のみならず、該回転を促進する外力に対しても、その影響を抑えることができる。
【0121】
また、電気的な検知システムや電子制御によらず、メカニカル(機械的)な構成で実現可能のなので、低コストで目的を達成することができる。
【0122】
さらに、フライホイールのような大型の部材を使わなくても、レイアウト上の制約が少ない小型な構成で実現可能である。
【0123】
また、本実施形態では、梃子の原理を応用して、変位ローラ212の変位を摩擦部材228の変位に変換しているので、梃子の作用をする長尺体230の支点234の位置の取り方により、摩擦部材228を回転軸224に押し当てる状態を制御することができる。
【0124】
即ち、図9〜図11に示されるように、本実施形態では、長尺体230における摩擦部材228寄りの位置に支点234が設けられているが、この場合、中間転写ベルト90の弛緩乃至緊張に基づく変位ローラ212の変位の力が弱くても、梃子の原理によって増幅されて摩擦部材228を回転軸224に押し当てる力に作用する。そのため、摩擦部材228による制動力を有効に働かせるように装置を調整し易い。
【0125】
この時、例えば、力点である連結部材232及び長尺体230の連結部(図中符号の無い丸部)と支点234との距離をr1、作用点である長尺体230の摩擦部材228の取付部と支点234との距離をr2とすると、中間転写ベルト90の弛緩乃至緊張に基づく変位ローラ212の変位の力がr1/r2倍に増幅されて、摩擦部材228を回転軸224に押し当てる力に作用する。
【0126】
以上のように、制動力を増幅させることができるため、例えば、第1の実施形態で説明した、変位ローラ212における中間転写ベルト90の張り渡し角度θを十分に大きくすることができない場合でも、梃子の原理を応用することで必要な制動力の変動量を確保することができる。
【0127】
(第3の実施形態)
図12に、本発明の例示的一態様である第3の実施形態のベルト駆動装置の概略構成図を示す。図12は、図1に示す画像形成装置における搬送系のみを抜き出し、これに本実施形態に特有の構成を加えたものである。本実施形態は、図1の画像形成装置における第2の領域Eに制動制御機構を備えた例である。
【0128】
中間転写ベルト90は、駆動ローラ52と、受容ローラ64と、従動ローラの一例である支持ローラ54及び制動変位ローラ302と、からなる複数のローラに張り渡されている。
【0129】
図13に、制動制御機構を含む制動変位ローラ302及びその周辺の矢印G方向から見た拡大図を示す。
【0130】
制動変位ローラ302は、軸方向両側から突出する回転軸304が、装置筺体に固定されたガイド346に設けられた長孔306内に挿し込まれ、中間転写ベルト90の周内mi方向及び周外mo方向に変位可能に支持されている。なお、図12においては、長孔306が設けられたガイド346の図示を省略している(図14及び図15においても同様である。)。
【0131】
また、制動変位ローラ302の回転軸304は、軸受344に回転自在に支持されつつ、該軸受344を介して中間転写ベルト90の周外mo方向へ、装置筺体に固定されたばね台座342に固定された弾性部材の一例であるばね340によって押し込まれている。一方、ばね340によって押し込まれる方向に対向して、摩擦部材308が配され、ばね340の押し込む力によって両側の回転軸304が摩擦部材308に押し当てて摩擦力を生じさせることで制動力が加えられて、制動手段を構成している。
【0132】
制動変位ローラ302に巻き付いた部位の中間転写ベルト90には、回転方向(矢印B方向)上流側及び下流側に生ずる張力が作用しており、それらが合成した垂直力として、周内方向に押し込む力が制動変位ローラ302に作用している。この力によって減殺された、ばね340による押し込む力が、回転軸304を摩擦部材308に押し込む力として作用する。
以上のように、本実施形態における制動制御機構が構成されている。
【0133】
本実施形態のベルト駆動装置は、駆動ローラ52の回転駆動によって中間転写ベルト90が矢印B方向に回転する。この時、制動変位ローラ302に備えられた摩擦部材308等からなる制動手段によって、中間転写ベルト90の回転には、予め制動力が付与されており、当該制動力とそれよりも大きな力の駆動ローラ52による回転駆動力とが適切にバランスされて、一定の搬送力で中間転写ベルト90が矢印B方向に回転している。
【0134】
この状態で、二次転写装置60における受容ローラ64と二次転写ローラ66との間に用紙68が矢印C1に示すように進入する(図1、図3参照)等、受容ローラ64の回転を規制する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の下流側であって駆動ローラ52の上流側に位置する制動変位ローラ302の前後において、中間転写ベルト90の張力上昇が起こり、図14に示すように中間転写ベルト90が緊張する。
【0135】
ここで、図14は、本実施形態のベルト駆動装置において、受容ローラ64の回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。図14中の点線は、外力を受ける前の各部材の位置を示すものである。
【0136】
中間転写ベルト90の緊張によって、回転軸304が長孔306内を移動して、制動変位ローラ302が周内mi方向に変位する。制動変位ローラ302の周内mi方向への変位は、回転軸304が摩擦部材308にばね340で押し付けていた力を減殺するように作用することから、全体として、回転軸304との間の摩擦力が弱まる方向への摩擦部材308の相対的な変位に相当する。そのため、本実施形態では、受容ローラ64の回転を規制する外力を受けることで、制動変位ローラ302に備えられた制動手段によって付与されていた制動力が、弱まるように構成されている。
【0137】
本実施形態においては、受容ローラ64に外力による制動力が作用したと同時に、制動変位ローラ302に予め加えられていた制動力が弱められる。この両制動力をバランスさせることで、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0138】
一方、本実施形態の構成によれば、二次転写装置60における受容ローラ64と二次転写ローラ66との間に進入した用紙68が矢印C2に示すように排出される(図1、図3参照)等、受容ローラ64の回転を促進する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の下流側であって駆動ローラ52の上流側に位置する制動変位ローラ302の前後において、中間転写ベルト90の張力低下が起こり、図15に示すように中間転写ベルト90が弛緩する。
【0139】
ここで、図15は、本実施形態のベルト駆動装置において、受容ローラ64の回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。図15中の点線は、外力を受ける前の各部材の位置を示すものである。
【0140】
中間転写ベルト90の弛緩によって、回転軸304が長孔306内を移動して、制動変位ローラ302が周外mo方向に変位する。制動変位ローラ302の周外mo方向への変位は、中間転写ベルト90の張力で周内mi方向に押し込む力を減殺するように作用し、回転軸304が摩擦部材308にばね340で押し付けていた力を相対的に上昇させることから、前記制動手段における回転軸304との摩擦力が強まる方向への摩擦部材308の相対的な変位に相当する。そのため、本実施形態では、受容ローラ64の回転を促進する外力を受けることで、制動変位ローラ302に備えられた制動手段によって付与されていた制動力が、強まるように構成されている。
【0141】
本実施形態においては、受容ローラ64に駆動力を高める作用が生じたと同時に、制動変位ローラ302に予め加えられていた制動力が高められる。本実施形態によれば、これら駆動力の向上と制動力の上昇分とが自動的にバランスされるため、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0142】
なお、図14及び図15において、図示の便宜と説明の容易化を図る意図で、制動変位ローラ302の変位を若干大袈裟に描いているのは、第1の実施形態における図5及び図6と同様である。
【0143】
以上のように、本実施形態のベルト駆動装置によれば、予め外力の発生タイミングがわかっていない場合であっても、外力発生に伴う張力の変動を直接利用して制動力の増減に反映させているため、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御する場合に比べて、タイミングの遅れが生じ難く、精度よく外力によるベルト搬送速度の変動を抑制することができる。しかも、受容ローラ64の回転を規制する外力のみならず、該回転を促進する外力に対しても、その影響を抑えることができる。
【0144】
また、電気的な検知システムや電子制御によらず、メカニカル(機械的)な構成で実現可能のなので、低コストで目的を達成することができる。
【0145】
さらに、フライホイールのような大型の部材を使わなくても、レイアウト上の制約が少ない小型な構成で実現可能である。
【0146】
(第4の実施形態)
図16に、本発明の例示的一態様である第4の実施形態のベルト駆動装置の概略構成図を示す。図16は、図1に示す画像形成装置における搬送系のみを抜き出し、これに本実施形態に特有の構成を加えたものである。本実施形態は、図1の画像形成装置における第2の領域Eに制動制御機構を備えた例である。
【0147】
中間転写ベルト90は、駆動ローラ52と、従動ローラの一例である支持ローラ54、変位ローラ412及び制動ローラ422と、受容ローラ64と、からなる複数のローラに張り渡されている。
【0148】
図17に、制動制御機構を含む制動変位ローラ302及びその周辺の矢印H方向から見た拡大図を示す。
【0149】
変位ローラ412は、軸方向両側から突出する回転軸414が、装置筺体に固定されたガイド446に設けられた長孔416内に挿し込まれ、中間転写ベルト90の周内mi方向及び周外mo方向に変位可能に支持されている。なお、図16においては、長孔416が設けられたガイド446の図示を省略している(図18及び図19においても同様である。)。
【0150】
また、変位ローラ412の回転軸404は、軸受444に回転自在に支持されつつ、該軸受444を介して中間転写ベルト90の周外mo方向へ、装置筺体に固定されたばね台座442に固定された弾性部材の一例であるばね440によって押し込まれている。
【0151】
回転軸414には連結部材432の一端が回転軸414の回転自由度を損なわないように結合され、回転軸414のmi方向及びmo方向の変位が、連結部材432の他端に回転自在に結合した長尺体430の一端に伝達されるように構成されている。長尺体430はその中途に、回転自在に装置筺体に固定された支点434を有し、梃子の作用を具備している。梃子の作用を具備する長尺体430の他端には、摩擦部材428が取り付けられ、制動ローラ422の軸方向両側から突出する回転軸424に接触している。制動ローラ422の回転軸424における、制動ローラ422に巻き付いた中間転写ベルト90に面する側に摩擦部材428が位置するように、長尺体430が取り回される。
【0152】
回転軸414のmi方向及びmo方向の変位に基づく長尺体430の一端の動きは、梃子の作用によって、支点434を超えた位置では反対方向への動きに変換される。そして、その動きによって、摩擦部材428が回転軸424に対して変位する。
【0153】
変位ローラ412に巻き付いた部位の中間転写ベルト90には、回転方向(矢印B方向)上流側及び下流側に生ずる張力が作用しており、それらが合成した垂直力として、周内方向に押し込む力が変位ローラ412に作用している。この周内方向に押し込む力と、ばね440によって回転軸414を押し込む力とが、後者の力の方が大きくなるようにバランスされて、前者の力により減殺された後者の力が、連結部材432及び長尺体430を介して回転軸424に接触している摩擦部材428に作用する。この作用によって、摩擦部材428が回転軸424に押し当てられて摩擦力を生じ、制動力が加えられている。
以上のように、本実施形態における制動制御機構が構成されている。
【0154】
本実施形態のベルト駆動装置は、駆動ローラ52の回転駆動によって中間転写ベルト90が矢印B方向に回転する。この時、制動ローラ422に備えられた摩擦部材428等からなる制動手段によって、中間転写ベルト90の回転には、予め制動力が付与されており、当該制動力とそれよりも大きな力の駆動ローラ52による回転駆動力とが適切にバランスされて、一定の搬送力で中間転写ベルト90が矢印B方向に回転している。
【0155】
この状態で、二次転写装置60における受容ローラ64と二次転写ローラ66との間に用紙68が矢印C1に示すように進入する(図1、図3参照)等、受容ローラ64の回転を規制する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の下流側であって駆動ローラ52の上流側に位置する変位ローラ412の前後において、中間転写ベルト90の張力上昇が起こり、図18に示すように中間転写ベルト90が緊張する。
【0156】
ここで、図18は、本実施形態のベルト駆動装置において、受容ローラ64の回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。図18中の点線は、外力を受ける前の各部材の位置を示すものである。なお、図18においては、軸受444、ばね440及びばね台座442の図示を省略している(図19においても同様である。)。
【0157】
中間転写ベルト90の緊張によって、回転軸414が長孔416内を移動して、変位ローラ412が周内mi方向に変位する。変位ローラ212の周内mi方向への変位は、連結部材432により、長尺体430の力点に当たる一端に伝達され、当該一端が矢印m5方向へ動く。すると、長尺体430の作用点である他端は矢印m6方向へ動き、前記制動手段における回転軸424との間の摩擦力が弱まる方向への摩擦部材428の相対的な変位となる。そのため、本実施形態では、受容ローラ64の回転を規制する外力を受けることで、制動ローラ422に備えられた制動手段によって付与されていた制動力が、弱まるように構成されている。
【0158】
本実施形態においては、受容ローラ64に外力による制動力が作用したと同時に、制動ローラ422に予め加えられていた制動力が弱められる。この両制動力をバランスさせることで、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0159】
一方、本実施形態の構成によれば、二次転写装置60における受容ローラ64と二次転写ローラ66との間に進入した用紙68が矢印C2に示すように排出される(図1、図3参照)等、受容ローラ64の回転を促進する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する変位ローラ412の前後において、中間転写ベルト90の張力低下が起こり、図19に示すように中間転写ベルト90が弛緩する。
【0160】
ここで、図19は、本実施形態のベルト駆動装置において、受容ローラ64の回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。図19中の点線は、外力を受ける前の各部材の位置を示すものである。
【0161】
中間転写ベルト90の弛緩によって、回転軸414が長孔416内を移動して、変位ローラ412が周外mo方向に変位する。変位ローラ412の周外mo方向への変位は、連結部材432により長尺体430の一端に伝達され、当該一端が矢印m7方向へ動く。すると、長尺体430の他端は矢印m8方向へ動き、前記制動手段における回転軸424との摩擦力が強まる方向への摩擦部材428の相対的な変位となる。そのため、本実施形態では、受容ローラ64の回転を促進する外力を受けることで、制動ローラ422に備えられた制動手段によって付与されていた制動力が、強まるように構成されている。
【0162】
本実施形態においては、受容ローラ64に駆動力を高める作用が生じたと同時に、制動ローラ222に予め加えられていた制動力が高められる。本実施形態によれば、これら駆動力の向上と制動力の上昇分とが自動的にバランスされるため、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0163】
なお、図18及び図19において、図示の便宜と説明の容易化を図る意図で、変位ローラ412の変位を若干大袈裟に描いているのは、第1の実施形態における図5及び図6と同様である。
【0164】
以上のように、本実施形態のベルト駆動装置によれば、予め外力の発生タイミングがわかっていない場合であっても、外力発生に伴う張力の変動を直接利用して制動力の増減に反映させているため、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御する場合に比べて、タイミングの遅れが生じ難く、精度よく外力によるベルト搬送速度の変動を抑制することができる。しかも、受容ローラ64の回転を規制する外力のみならず、該回転を促進する外力に対しても、その影響を抑えることができる。
【0165】
また、電気的な検知システムや電子制御によらず、メカニカル(機械的)な構成で実現可能のなので、低コストで目的を達成することができる。
【0166】
さらに、フライホイールのような大型の部材を使わなくても、レイアウト上の制約が少ない小型な構成で実現可能である。
【0167】
また、本実施形態では、梃子の原理を応用して、変位ローラ412の変位を摩擦部材428の変位に変換しているので、梃子の作用をする長尺体430の支点434の位置の取り方により、摩擦部材428を回転軸424へに押し当てる状態を制御することができる。
【0168】
即ち、図16、図18及び図19に示されるように、本実施形態では、長尺体430における摩擦部材428寄りの位置に支点434が設けられているが、この場合、中間転写ベルト90の弛緩乃至緊張に基づく変位ローラ412の変位の力が弱くても、梃子の原理によって増幅されて摩擦部材428を回転軸224に押し当てる力に作用する。そのため、摩擦部材428による制動力を有効に働かせるように装置を調整し易い。この増幅の程度としては、第3の実施形態で説明したとおりである。
【0169】
以上のように、制動力を増幅させることができるため、例えば、第1の実施形態で説明した、変位ローラ412における中間転写ベルト90の張り渡し角度θを十分に大きくすることができない場合でも、梃子の原理を応用することで必要な制動力の変動量を確保することができる。
【0170】
[総括]
以上、本発明について、4つの好ましい実施形態を挙げて説明したが、本発明のベルト駆動装置はこれら実施形態の構成に限定されるものではない。
【0171】
例えば、以上の実施形態では、図1の画像形成装置における第1の領域Dと第2の領域Eのいずれか一方に制動制御機構を備えた例のみを例示しているが、本発明においては、無端ベルトの回転方向における受容ローラの上流かつ駆動ローラの下流の第1の領域と、前記受容ローラの下流かつ前記駆動ローラの上流の第2の領域の双方に、制動制御機構を備えた構成であっても構わない。双方に制動制御機構を備えることで、どちらか一方のみでは、変位可能に支持された従動ローラの変位から変換された摩擦部材の変位に基づく制動力の変化量が、外力による受容ローラの規制乃至促進に基づく制動乃至駆動促進に対応することが困難な場合にも、その変化量を広げることができるため、対応が可能になる。
【0172】
例えば、第1の実施形態において説明したベルト張り渡し角度θを十分に大きく取ることが、スペースの関係上困難な場合に、第1の領域と第2の領域の双方に制動制御機構を設けることで、制動力の変化量を大きく取ることができ、本発明の優れた効果を実現することができる。
【0173】
第1の領域と第2の領域の双方に制動制御機構を設ける場合、両制動制御機構の構成に制限は無く、例えば、第1の領域に第1の実施形態及び第2の実施形態の構成のいずれを採用してもよいし、第2の領域に第3の実施形態及び第4の実施形態の構成のいずれを採用してもよいし、それぞれそれ以外の変形例の構成を採用してもよく、適宜選択して組み合わせて設計すればよい。
【0174】
さらに、第1の領域と第2の領域のいずれか一方、若しくは双方に、複数の制動制御機構を設けても構わない。設けた数の分だけ、制動力の変化量を大きく取ることができる。ただし、あまりに大型にするとスペース的に不利であり、また、装置設計も却って複雑になる。また、これらの観点から、複数の制動制御機構を設ける場合には、第1の領域と第2の領域に分けて設けることが好ましい。
【0175】
一方、本発明のベルト駆動装置を適用した本発明の画像形成装置について、上記実施形態では、いわゆるタンデム方式のフルカラー画像形成装置を例に挙げて説明したが、本発明においてはこれに限定されるものでは無く、1つの像保持体表面に複数の色のトナー像を形成し得る回転切替形の現像装置を用いて、複数の色のトナー像を現像しつつ、その都度中間転写体表面に積層し、全色積層後一括して記録媒体に転写してフルカラー画像を形成する、いわゆるロータリー方式の画像形成装置や、単一のトナー像形成手段しか有さない単色の画像形成装置であっても、本発明のベルト駆動装置を適用することができる。
【0176】
その他、当業者は、従来公知の知見に従い、本発明のベルト駆動装置及び画像形成装置を適宜改変することができる。かかる改変によってもなお本発明のベルト駆動装置乃至画像形成装置の構成を具備する限り、勿論、本発明の範疇に含まれるものである。
【産業上の利用可能性】
【0177】
本発明のベルト駆動装置は、上記実施形態では画像形成装置における中間転写ベルトの搬送に適用する例が例示されているが、その他画像形成装置において、複数のローラに張り渡された無端状のベルトを搬送するとともに、当該複数のローラのいずれかが外力を受容する構成を含む場合に、当該無端状のベルトのベルト搬送装置として適用可能である。
【0178】
画像形成装置における中間転写ベルトは、複数のローラに張り渡された状態で、感光体ドラムの如き潜像保持体に対向する位置の中間転写ベルトの周内に転写手段を設けて、ベルトユニットとして取引、搬送、利用される場合がある。本発明のベルト駆動装置は、そのようなベルトユニットにも勿論適用することができる。そして、本発明のベルト駆動装置を中間転写ベルトの搬送に用いた当該ベルトユニットは、本発明のベルトユニットに相当する。
【0179】
即ち、本発明のベルトユニットは、
本発明のベルト駆動装置と、
表面にトナー像を保持し前記ベルトの外周面に接触して配置される像保持体に対向する位置に、前記ベルトの内周面側に設けられた転写手段と、
を備え、
前記像保持体表面のトナー像が、前記転写手段によって前記ベルトの外周面に転写されるように構成されてなることを特徴とするものである。
【符号の説明】
【0180】
2:感光体ドラム、 4:帯電装置、 6:露光装置、 8:現像装置、 12:除電ランプ、 14:一次転写装置、 22:クリーニング装置、 48:作像ユニット、 52:駆動ローラ、 54:支持ローラ、 58:搬送ガイド、 60:二次転写装置、 62:定着装置、 64:受容ローラ、 66:二次転写ローラ、 68:用紙、 90:中間転写ベルト、 102,302:制動変位ローラ、 104,214,224,304,414,424:回転軸、 106,216,306,416:長孔、 108,228,308,428:摩擦部材、 212,412:変位ローラ、 222,422:制動ローラ、 230,430:長尺体、 232,432:連結部材、 234,434:支点、340,440:ばね、 342:ばね台座,442、 344,444:軸受、 346,446:ガイド
【技術分野】
【0001】
本発明は、ベルト駆動装置、ベルトユニット及び画像形成装置に関する。
【背景技術】
【0002】
像保持体の表面に形成されたトナー像を中間転写ベルトの表面に転写した後、該中間転写ベルトと転写ローラとの圧接によるニップ内に記録部材を挿通させてこれに転写する画像形成装置において、中間転写ベルトの速度変動による像保持体から中間転写ベルトへの転写時のトナー像の乱れ、特に多色画像形成装置における色ズレの発生を抑制するべく、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御することで、中間転写ベルトの速度を安定化させる技術がある(例えば、特許文献1、特許文献2参照)。
【0003】
また、特許文献3や特許文献4には、張架ローラに制動力付与手段を設け、用紙投入等の外力の発生タイミングと同期させて、当該外力による負荷変動を相殺するように前記制動力付与手段による制動力をアクティブ制御する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平11−24507号公報
【特許文献2】特開平10−232566号公報
【特許文献3】特開2003−270887号公報
【特許文献4】特開2007−286383号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置、及び、画像形成装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題は、以下の<1>〜<14>に示す本発明により達成される。
<1> 複数のローラに張り渡された無端状のベルトと、
前記ローラの1つであって、前記ベルトを回転駆動する駆動ローラと、
前記ローラの他の1つであって、前記ベルトを介して加えられた外力を受容する受容ローラと、
残りの前記ローラであって、前記ベルトに従動して回転し、少なくとも1個が、当該ベルトの張力に従って該ベルトの周内外方向に変位可能に支持された、1個または2個以上の従動ローラと、
該従動ローラの内のいずれかの回転軸に相対的に摩擦部材を押し当てて摩擦力を生じさせることで制動するとともに、前記受容ローラの回転を規制する外力を受けた際に、前記ベルトの回転方向における、前記受容ローラの上流側かつ前記駆動ローラの下流側の領域の当該ベルトが弛緩し、前記受容ローラの下流側かつ前記駆動ローラの上流側の領域の当該ベルトが緊張する作用で生ずる、前記変位可能に支持された従動ローラの変位を、前記回転軸との摩擦力が弱まる方向への当該摩擦部材の相対的な変位に変換する機構を有する制動手段と、
を備えることを特徴とするベルト駆動装置。
【0007】
<2> 前記ベルトの回転方向における前記受容ローラの上流かつ前記駆動ローラの下流の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラが配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、前記変位可能に支持された従動ローラの前記ベルトの周外方向への変位を、前記回転軸と前記摩擦部材との相対的な変位に変換する機構であることを特徴とする<1>に記載のベルト駆動装置。
【0008】
<3> 前記摩擦部材が、前記変位可能に支持された従動ローラに備えられており、
前記制動手段における機構は、前記従動ローラの前記回転軸への前記摩擦部材による摩擦力が、当該変位可能な従動ローラが前記ベルトの張力によりその周内方向に押し込まれる力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする<2>に記載のベルト駆動装置。
【0009】
<4> 前記摩擦部材が、前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側とは反対側から押し当てる位置に前記摩擦部材が配されるとともに、前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする<2>に記載のベルト駆動装置。
【0010】
<5> 前記ベルトの回転方向における前記受容ローラの下流かつ前記駆動ローラの上流の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラが配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、前記変位可能に支持された従動ローラの前記ベルトの周内方向への変位を、前記回転軸と前記摩擦部材との相対的な変位に変換する機構であることを特徴とする<1>に記載のベルト駆動装置。
【0011】
<6> 前記摩擦部材が、前記変位可能に支持された従動ローラに備えられており、
前記制動手段における機構は、前記従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持されるとともに、当該回転軸への前記摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする<5>に記載のベルト駆動装置。
【0012】
<7> 前記摩擦部材が、前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持され、当該回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側から押し当てる位置に前記摩擦部材が配され、当該回転軸への当該摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされるとともに、前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする<5>に記載のベルト駆動装置。
【0013】
<8> 前記ベルトの回転方向における前記受容ローラの上流かつ前記駆動ローラの下流の第1の領域と、前記受容ローラの下流かつ前記駆動ローラの上流の第2の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラがそれぞれ配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、第1の領域に配された前記変位可能に支持された従動ローラの前記ベルトの周外方向への変位を、第1の領域に配された前記摩擦部材を備えた従動ローラにおける前記回転軸と当該摩擦部材との相対的な変位に変換する機構、及び、第2の領域に配された前記変位可能に支持された従動ローラの前記ベルトの周内方向への変位を、第2の領域に配された前記摩擦部材を備えた従動ローラにおける前記回転軸と当該摩擦部材との相対的な変位に変換する機構であることを特徴とする<1>に記載のベルト駆動装置。
【0014】
<9> 第1の領域における前記摩擦部材が、第1の領域に配された前記変位可能に支持された従動ローラに備えられており、
該従動ローラの前記回転軸への前記摩擦部材による摩擦力が、当該変位可能な従動ローラが前記ベルトの張力によりその周内方向に押し込まれる力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする<8>に記載のベルト駆動装置。
【0015】
<10> 第1の領域における前記摩擦部材が、第1の領域に配された前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
第1の領域に配された前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側とは反対側から押し当てる位置に前記摩擦部材が配されるとともに、第1の領域に配された前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする<8>に記載のベルト駆動装置。
【0016】
<11> 第2の領域における前記摩擦部材が、第2の領域に配された前記変位可能に支持された従動ローラに備えられており、
第2の領域に配された前記制動手段における機構は、前記従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持されるとともに、当該回転軸への前記摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする<8>〜<10>のいずれかに記載のベルト駆動装置。
【0017】
<12> 第2の領域における前記摩擦部材が、第2の領域に配された前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
第2の領域に配された前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持され、当該回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側から押し当てる位置に前記摩擦部材が配され、当該回転軸への当該摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされるとともに、第2の領域に配された前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする<8>〜<10>のいずれかに記載のベルト駆動装置。
【0018】
<13> <1>〜<12>のいずれかに記載のベルト駆動装置と、
表面にトナー像を保持し前記ベルトの外周面に接触して配置される像保持体に対向する位置に、前記ベルトの内周面側に設けられた転写手段と、
を備え、
前記像保持体表面のトナー像が、前記転写手段によって前記ベルトの外周面に転写されるように構成されてなることを特徴とするベルトユニット。
【0019】
<14> 像保持体と、該像保持体表面にトナー像を形成するトナー像形成手段と、複数のローラに張り渡された無端状の中間転写ベルトと、該中間転写ベルトの外周面に前記像保持体表面に形成されたトナー像を転写する一次転写手段と、前記複数のローラの内の1つに前記中間転写ベルトを挟んで転写ローラが押し当てられて、前記中間転写ベルトの外周面に形成されたトナー像を外部から供給される記録媒体に転写する二次転写手段と、を備え、
前記複数のローラの内、前記中間転写ベルトを挟んで前記転写ローラが圧接されるローラを受容ローラ、他の1つを駆動ローラ、残りのローラを従動ローラとする<1>〜<12>のいずれかに記載のベルト駆動装置によって前記中間転写ベルトを無端状のベルトとして駆動することを特徴とする画像形成装置。
【発明の効果】
【0020】
<1>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0021】
<2>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0022】
<3>にかかる発明によれば、本構成を具備しない場合に比べて、簡易な構成で、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0023】
<4>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0024】
<5>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0025】
<6>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルト駆動装置を提供することができる。
【0026】
<7>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0027】
<8>にかかる発明によれば、第1の領域と第2の領域の一方にのみ制動手段を備える場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0028】
<9>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0029】
<10>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0030】
<11>にかかる発明によれば、本構成を具備しない場合に比べて、摩擦部材による回転軸への制動力の調整幅を拡大することができる。
【0031】
<12>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動をより一層抑制し得るベルト駆動装置を提供することができる。
【0032】
<13>にかかる発明によれば、本構成を具備しない場合に比べて、外力の発生タイミングが未知であっても、当該外力によるベルト搬送速度の変動を抑制し得るベルトユニットを提供することができる。
【0033】
<14>にかかる発明によれば、本構成を具備しない場合に比べて、受容ローラと転写ローラとの間への記録媒体の進入や排出により中間転写ベルトに外力が加えられた場合にも像の乱れの少ない画像を形成し得る画像形成装置を提供することができる。
【図面の簡単な説明】
【0034】
【図1】本発明のベルト駆動装置を適用可能なタンデム型のカラー画像形成装置の一例を示す概略構成図である。
【図2】図1中の各作像ユニットの概略構成図である。
【図3】外力を受けた際の図1に示す画像形成装置の搬送系における作用を説明するための、搬送系のみを抜き出した概略構成図である。
【図4】本発明の例示的一態様である第1の実施形態のベルト駆動装置を示す概略構成図である。
【図5】図4に示す第1の実施形態のベルト駆動装置において、受容ローラの回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。
【図6】図4に示す第1の実施形態のベルト駆動装置において、受容ローラの回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。
【図7】図4に示す第1の実施形態のベルト駆動装置における制動手段の摩擦部材と制動変位ローラの回転軸との位置関係を説明するための説明図であり、(a)は定常状態、(b)は制動力が弱まった状態、(c)は制動力が強まった状態、(d)は両者が離間した状態を表すものである。
【図8】図4に示す第1の実施形態のベルト駆動装置における制動変位ローラ周辺の拡大図である。
【図9】本発明の例示的一態様である第2の実施形態のベルト駆動装置を示す概略構成図である。
【図10】図9に示す第2の実施形態のベルト駆動装置において、受容ローラの回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。
【図11】図9に示す第2の実施形態のベルト駆動装置において、受容ローラの回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。
【図12】本発明の例示的一態様である第3の実施形態のベルト駆動装置を示す概略構成図である。
【図13】図12に示す第3の実施形態のベルト駆動装置における制動変位ローラ周辺の矢印G方向から見た拡大図である。
【図14】図12に示す第3の実施形態のベルト駆動装置において、受容ローラの回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。
【図15】図12に示す第3の実施形態のベルト駆動装置において、受容ローラの回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。
【図16】本発明の例示的一態様である第4の実施形態のベルト駆動装置を示す概略構成図である。
【図17】図16に示す第4の実施形態のベルト駆動装置における制動変位ローラ周辺の矢印H方向から見た拡大図である。
【図18】図16に示す第4の実施形態のベルト駆動装置において、受容ローラの回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。
【図19】図16に示す第4の実施形態のベルト駆動装置において、受容ローラの回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。
【発明を実施するための形態】
【0035】
以下、本発明のベルト駆動装置を適用可能な画像形成装置を例示した上で、本発明のベルト駆動装置の実施形態を挙げて詳細に説明する。
【0036】
[1.画像形成装置の実施形態]
図1は、本発明のベルト駆動装置を適用可能な画像形成装置の一例としてのタンデム型のカラー画像形成装置を示す概略構成図である。ただし、図1において、本発明に特徴的な構成は描かれていない。この画像形成装置は、基本構成として、電子写真方式により画像情報に基づくイエロー(Y)、マゼンタ(M)、シアン(C)、ブラック(K)の各色成分の未定着トナー画像をそれぞれ形成する4つの作像ユニット48Y,48M,48C,48Kと、この各作像ユニット48(48Y,48M,48C,48K)で形成される各未定着トナー画像が積層転写される中間転写ベルト90と、この中間転写ベルト90の表面に積層転写された未定着トナー画像を記録媒体の一例である用紙68に転写する二次転写装置60と、未定着トナー画像が転写された用紙68を熱及び圧力により定着させる定着装置62と、から基本的に構成されている。図中の矢付一点鎖線は、用紙68の搬送経路を示す。用紙68は、給紙部(図示省略)から1枚ずつ供給されるようになっている。
【0037】
作像ユニット48Y、48M、48C、48Kは、水平方向にそって一定の間隔をあけた並列状態で配設されており、そのいずれも同様の構成からなるものである。
【0038】
図2は、これら各作像ユニット48(48Y,48M,48C,48K)の概略構成図である。作像ユニット48は、基本構成として、一様帯電後に像光を照射することにより表面に潜像が形成される円筒状の感光体ドラム2を備えており、この感光体ドラム2の周囲に、感光体ドラム2の表面を一様に帯電させる帯電装置4と、感光体ドラム2に像光を照射して表面に潜像を形成する露光装置6と、感光体ドラム2表面の潜像にトナーを選択的に転移させてトナー画像を形成する現像装置8と、感光体ドラム2表面に形成されたトナー画像を中間転写ベルト90に転写する一次転写手段の一例である一次転写装置14と、感光体ドラム2表面に残留したトナーを回収するクリーニング装置22と、感光体ドラム2表面に残留した電位を除去する除電ランプ12を備える。
【0039】
感光体ドラム2は、像保持体の一例であり、全体としてドラム状に形成されたもので、その外周面(ドラム表面)に感光層を有している。この感光体ドラム2は図2の矢印A方向に回転可能に設けられている。
【0040】
感光体ドラム2は、少なくとも潜像(静電荷像)が形成される機能を有する。静電潜像保持体としては、電子写真感光体が好適なものとして挙げられる。感光体ドラム2は、円筒状の導電性の基体外周面に有機感光層等を含む感光層が形成されてなる。この感光層は一般的に、基体表面に必要に応じて下引き層が形成され、さらに電荷発生物質を含む電荷発生層と、電荷輸送物質を含む電荷輸送層とがこの順序で形成されたものである。電荷発生層と電荷輸送層の積層順序は逆であってもよい。
【0041】
これらは、電荷発生物質と電荷輸送物質とを別個の層(電荷発生層、電荷輸送層)に含有させて積層した積層型感光体であるが、電荷発生物質及び電荷輸送物質の両方を同一の層に含む単層型感光体であってもよく、好ましくは積層型感光体である。また、下引き層と感光層との間に中間層を有していてもよい。また、有機感光層に限らずアモルファスシリコン感光膜等他の種類の感光層を使用してもよい。
【0042】
帯電装置4は、感光体ドラム2の表面を一様に帯電するものである。帯電装置4としては、例えば、導電性または半導電性の接触型帯電器である帯電ローラが用いられるが、コロトロンなどの非接触型帯電器を用いてもよい。帯電ローラを用いた場合には、感光体ドラム2に対し、直流電流を印加するか、交流電流を重畳させて印加してもよい。このような帯電装置4により、感光体ドラム2との接触部近傍の微小空間で放電を発生させることにより感光体ドラム2表面を帯電させる。
【0043】
帯電手段によって感光体ドラム2の表面は、通常、−300V〜−1000Vに帯電される。また、前記の導電性または半導電性の帯電ローラは単層構造あるいは多重構造でもよい。さらに、帯電ローラの表面をクリーニングする機構を設けてもよい。
【0044】
露光装置6は、帯電装置4によって一様に帯電された感光体ドラム2に像様の光Xを照射することにより、静電潜像を形成するものである。露光装置6としては、特に制限はなく、例えば、静電潜像保持体表面に、半導体レーザ光、LED光、液晶シャッター光等の光源を、所望の像様に露光する光学系機器等が挙げられる。
【0045】
現像装置8は、静電潜像保持体上に形成された潜像を、トナーを含む現像剤により現像してトナー像を形成する機能を有するものである。現像装置8としては、上述の機能を有している限り特に制限はなく、目的に応じて適宜選択すればよいが、例えば、静電荷像現像用のトナーと磁性キャリアとを含む二成分現像剤が収容され、当該磁性キャリアによって形成された磁気ブラシにより、トナーを感光体ドラム2に付着させる現像器等が挙げられる。現像の際、感光体ドラム2には、通常直流電圧が使用されるが、さらに交流電圧を重畳させて使用してもよい。
作像ユニット48Yの現像装置8にはイエロートナー、作像ユニット48Mの現像装置8にはマゼンタトナー、作像ユニット48Cの現像装置8にはシアントナー、作像ユニット48Kの現像装置8にはブラックトナーが、それぞれ収容される。
【0046】
一次転写装置14は、感光体ドラム2との間で中間転写ベルト90を挟持しつつ、感光体ドラム2表面に形成されたトナー像を無端状の中間転写ベルト90の外周面に転写(一次転写)するものである。
【0047】
一次転写装置14としては、例えば、中間転写ベルト90の裏側からトナー像のトナーとは逆極性の電荷を与え、静電気力によりトナー像を中間転写ベルト90表面に転写するもの、あるいは中間転写ベルト90の裏面に直接接触して転写する導電性または半導電性のローラ等を用いた転写ローラ及び転写ローラ押圧装置を用いればよい。
【0048】
転写ローラには、感光体ドラム2に付与する転写電流として、直流電流を印加してもよいし、交流電流を重畳させて印加してもよい。転写ローラは、帯電すべき画像領域幅、転写帯電器の形状、開口幅、周速等に応じて、各種条件乃至諸元を適宜設定すればよい。また、低コスト化のため、転写ローラとして単層の発泡ローラ等が好適に用いられる。
【0049】
クリーニング装置22は、転写後に感光体ドラム2表面に残ったトナー等をクリーニング(除去)するものである。クリーニング装置22としては、本例においてはブレードクリーニング方式を採用しているが、感光体ドラム2表面の残留トナーを清掃し得るものであれば、ブラシクリーニング方式、ローラクリーニング方式を採用したもの等、適宜選定して差し支えない。これらの中でもクリーニングブレードを用いることが好ましい。クリーニングブレードの材質としてはウレタンゴム、ネオプレンゴム、シリコーンゴム等が挙げられる。中でも、耐摩耗性に優れていることから、特にポリウレタン弾性体を用いることが好ましい。
【0050】
なお、転写効率の高いトナーを使用する場合には、クリーニング装置22が省略された態様であっても構わない。
【0051】
それぞれの作像ユニット48において、感光体ドラム2表面が、帯電装置4によって一様に帯電され、露光装置6で画像情報に基づくイエロー(Y)、マゼンタ(M)、シアン(C)、ブラック(K)の各色成分の潜像が形成され、これに応じてそれぞれの色のトナーが収容された現像装置8により未定着トナー画像が各感光体ドラム2に形成される(作像ユニット48における感光体ドラム2を除く以上の構成が、本発明に言う「トナー像形成手段」の一例に相当する。)。それぞれの感光体ドラム2表面に形成された各色の未定着トナー像は、一次転写装置14によって順次中間転写ベルト90の表面に積層転写される構成となっている。
【0052】
中間転写ベルト90は、図示しない回転駆動源により回転駆動する駆動ローラ52と、従動回転して中間転写ベルト90を支持する支持ローラ54と、二次転写装置60における受容ローラ64と、図1においては不図示の後述する1個または2個以上の従動ローラと、からなる複数のローラに張り渡されるとともに、駆動ローラ52と支持ローラ54との間で、前記各作像ユニット48における感光体ドラムの一次転写位置を通過する状態で配設されている。中間転写ベルト90は駆動ローラ52によって矢印B方向に周動回転する。
【0053】
なお、公知の如く、中間転写ベルト90に一定の張力(テンション)を与えるためのテンションローラを備える場合、当該テンションローラも中間転写ベルト90の張り渡しに資する。本実施形態においても、所望の張力を与えるためにテンションローラを備えることが好ましいが、図面上は省略する。本発明において、当該テンションローラも、「従動ローラ」の1つを構成する。ただし、当該テンションローラが、その他の機能を有していても構わない。以降の説明において、テンションローラについての説明は割愛する。
【0054】
中間転写ベルト90としては、特に制限はなく、従来公知のものが問題なく使用可能であるが、例えば、ベルト基材表面に表面層を積層形成した2層構造のものが使用される。
【0055】
中間転写ベルト90に用いられる材料としては、ポリカーボネート樹脂(PC)、ポリフッ化ビニリデン(PVDF)、ポリアルキレンフタレート、PC/ポリアルキレンテレフタレート(PAT)のブレンド材料、エチレンテトラフロロエチレン共重合体(ETFE)/PC、ETFE/PAT、PC/PATのブレンド材料等が挙げられるが、機械的強度の観点から熱硬化ポリイミド樹脂を用いた中間転写ベルトが好ましい。
【0056】
二次転写装置60は、中間転写ベルト90を挟むような状態で対向配設される受容ローラ64と二次転写ローラ66とでその主要部が構成されている。この二次転写ローラ66と中間転写ベルト90との間に形成されるニップ部に用紙68を挿通し、静電的作用を施すことで、中間転写ベルト90表面の未定着トナー画像を用紙68表面に転写するように構成されている。二次転写装置60としては、特に制限はなく、従来公知の構成を問題なく採用することができる。具体的には、既述の一次転写装置14と同様の構成の物を適用することができる。
【0057】
また、定着装置62は、記録媒体に転写されたトナー像を加熱、加圧あるいは加熱加圧等より定着するものである。本実施形態のような2ローラ方式の他、加熱側または加圧側がベルト状で他方がローラ状のベルト−ローラニップ方式、加熱側及び加圧側の双方ともベルト状の2ベルト方式等が挙げられる。ベルトについては、複数のローラでベルトを張架する方式の他、ベルトを張架せずに用いるフリーベルト方式も挙げられる。本発明においては、いずれの方式の定着装置であっても構わない。
【0058】
トナー像が転写されて最終的な記録画像が形成される用紙68としては、例えば、電子写真方式の複写機、プリンタ等に使用される普通紙、OHPシート等が挙げられる。定着後における画像表面の平滑性をさらに向上させるには、記録媒体の表面もできるだけ平滑であることが好ましく、例えば、普通紙の表面を樹脂等でコーティングしたコート紙、印刷用のアート紙等を好適に使用される。
【0059】
このような基本構成からなる本実施形態の画像形成装置では、次のようにしてカラー画像の形成が行われる。
【0060】
まず、各作像ユニット48において、各感光体ドラムに形成される4色の未定着トナー画像が、一次転写装置14の静電的な転写作用により中間転写ベルト90の表面に重ね合わせられるようにして順次一次転写される。
【0061】
中間転写ベルト90に転写されて担持された未定着トナー画像は、そのベルトの回転に伴って二次転写装置60を通過するように搬送されることにより用紙68に転写される。すなわち、中間転写ベルト90表面の未定着トナー画像は、受容ローラ64と二次転写ローラ66との間のニップ部に中間転写ベルト90とともに挿通される用紙68に接した状態で静電的に転写される。
【0062】
トナー画像が転写された用紙68は、二次転写装置60から排出されると、搬送ガイド58を経由して定着装置62により定着され、その後、系外に排出される。その結果、用紙68の片面に対してフルカラー画像が形成される。
【0063】
以上の如き、画像形成装置において、矢付一点鎖線に示されるように用紙68が二次転写装置60に進入する際、その厚みに基づく抵抗により、中間転写ベルト90の矢印B方向への搬送、並びに、受容ローラ64の回転が規制される。すなわち、用紙68として厚紙の進入は、本画像形成装置の搬送系に対して、受容ローラ64の回転を規制する外力となる。この外力は、用紙68が厚いほど、大きい傾向にある。
【0064】
このような外力を受けた際の本画像形成装置の搬送系における作用を、図3を用いて説明する。図3は、図1に示す画像形成装置における搬送系のみを抜き出した概略構成図である。矢印C1方向から、二次転写ローラ66と中間転写ベルト90を挟んで対向配設される受容ローラ64との間に用紙68が進入する際(図1参照)、その厚みに基づく抵抗を受けるため、中間転写ベルト90の矢印B方向への搬送、並びに、受容ローラ64の回転が規制される。
【0065】
受容ローラ64の回転が規制される中、駆動ローラ52はそのままの速度で回転駆動を続けるため、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側の第1の領域D及び第1の領域D’において、中間転写ベルト90が弛緩し、受容ローラ64の下流側であって駆動ローラ52の上流側の第2の領域Eにおいて、中間転写ベルト90が緊張する。
【0066】
一方、矢印C2方向へ、二次転写ローラ66と中間転写ベルト90を挟んで対向配設される受容ローラ64との間から用紙68が排出される際(図1参照)、その厚みのため二次転写ローラ66と受容ローラ64との間が離間していたところ、排出と同時に両者間に空隙が生じてすぐに接触するが、その僅かの間に、中間転写ベルト90の矢印B方向への搬送、並びに、受容ローラ64の回転が促進される。
【0067】
受容ローラ64の回転が促進される中、駆動ローラ52はそのままの速度で回転駆動を続けるため、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側の第1の領域D及び第1の領域D’において、中間転写ベルト90が緊張し、受容ローラ64の下流側であって駆動ローラ52の上流側の第2の領域Eにおいて、中間転写ベルト90が弛緩する。
【0068】
この中間転写ベルト90の搬送速度の変動は、各作像ユニット48における感光体ドラムの一次転写位置でのトナー像の転写に影響し、像の乱れや色ズレの原因になる。
【0069】
本実施形態の画像形成装置においては、予め制動手段によって制動力が加えられた従動ローラを中間転写ベルト90の張り渡しに供しておき、その従動ローラまたはそれとは別の従動ローラを中間転写ベルト90の周内外方向に変位可能に支持した上で、用紙68が二次転写装置60に進入する際の、受容ローラ64の回転を規制する外力によって上記弛緩あるいは緊張する作用で生ずる、前記変位可能に支持された従動ローラの変位を、前記回転軸との摩擦力が弱まる方向への当該摩擦部材の相対的な変位に変換する機構(当該機構を以下「制動制御機構」と称する場合がある。)を制動手段が備えることで、外力による影響を緩和している。
【0070】
当該制動制御機構を備えることによって、進入した用紙68が二次転写装置60から排出される際の、受容ローラ64の回転を促進する外力によって上記弛緩あるいは緊張する作用で生ずる、前記変位可能に支持された従動ローラの変位は、前記制動手段における前記回転軸への押圧力が強まるように自動的に制御され、外力による影響が緩和される(以上のベルト駆動装置の作用の詳細については、[2.ベルト駆動装置の実施形態]の項を参照)。
【0071】
このように、本実施形態の画像形成装置では、厚みのある記録媒体を用いた場合にも、その投入時や排出時に外力が加わることによる中間転写体の速度変動が抑制されて、像の乱れや色ズレの少ない画像を形成することができる。
【0072】
外力によって中間転写ベルト90が緊張あるいは弛緩する作用を利用することから、制動制御機構は、第1の領域D,D’及び第2の領域Eのいずれか(または双方)に備えられればよいが、本実施形態の画像形成装置においては、第1の領域D’にはタンデム状に作像ユニット48が配置されているため、実質的には第1の領域D’に設けることはできない。よって、かかる制動制御機構は、本実施形態において、第1の領域D及び第2の領域Eのいずれか(または双方)に備えられる。
【0073】
[2.ベルト駆動装置の実施形態]
以下、上記画像形成装置の実施形態における第1の領域D及び第2の領域Eのそれぞれに制動制御機構が備えられた態様をそれぞれ2つずつ例示し、本発明のベルト駆動装置の好ましい実施形態を挙げて、本発明を具体的に説明する。
【0074】
(第1の実施形態)
図4に、本発明の例示的一態様である第1の実施形態のベルト駆動装置の概略構成図を示す。図4は、図1に示す画像形成装置における搬送系のみを抜き出し、これに本実施形態に特有の構成を加えたものである。本実施形態は、図1の画像形成装置における第1の領域Dに制動制御機構を備えた例である。
【0075】
中間転写ベルト90は、駆動ローラ52と、従動ローラの一例である支持ローラ54及び制動変位ローラ102と、受容ローラ64と、からなる複数のローラに張り渡されている。
【0076】
制動変位ローラ102は、軸方向両側から突出する回転軸104が、装置筺体に固定された不図示のガイドに設けられた長孔106内に挿し込まれ、中間転写ベルト90の周内mi方向及び周外mo方向に変位可能に支持されている。また、制動変位ローラ102には、両側の回転軸104が、装置筺体に固定された摩擦部材108に押し当てて摩擦力を生じさせることで、制動力が加えられる構成の制動手段が備えられている。
【0077】
制動変位ローラ102に巻き付いた部位の中間転写ベルト90には、回転方向(矢印B方向)上流側に生ずる張力t1及び下流側に生ずる張力t2が作用しており、それらが合成した垂直力として、周内方向に押し込まれる力Nが制動変位ローラ102に作用している。
【0078】
回転軸104を摩擦部材108に押し当てることで生じる摩擦力は、制動変位ローラ102が中間転写ベルト90の張力によりその周内方向に押し込まれる力Nによってもたらされる、
以上のように、本実施形態における制動制御機構が構成されている。
【0079】
本実施形態のベルト駆動装置は、駆動ローラ52の回転駆動によって中間転写ベルト90が矢印B方向に回転する。この時、制動変位ローラ102に備えられた摩擦部材108等からなる制動手段によって、中間転写ベルト90の回転には、予め制動力が付与されており、当該制動力とそれよりも大きな力の駆動ローラ52による回転駆動力とが適切にバランスされて、一定の搬送力で中間転写ベルト90が矢印B方向に回転している。
【0080】
この状態で、二次転写装置60における受容ローラ64と二次転写ローラ66との間に用紙68が矢印C1に示すように進入する(図1、図3参照)等、受容ローラ64の回転を規制する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する制動変位ローラ102の前後において、張力t1及び張力t2の低下が起こり、その合成力である垂直力Nも低下して、図5に示すように中間転写ベルト90が弛緩する。
【0081】
ここで、図5は、本実施形態のベルト駆動装置において、受容ローラ64の回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。図5中の点線は、外力を受ける前の各部材の位置を示すものである。
【0082】
中間転写ベルト90の弛緩によって、回転軸104が長孔106内を移動して、制動変位ローラ102が周外mo方向に変位する。制動変位ローラ102の周外mo方向への変位は、前記制動手段における回転軸104との間の摩擦力が弱まる方向への摩擦部材108の相対的な変位に相当する。そのため、本実施形態では、受容ローラ64の回転を規制する外力を受けることで、制動変位ローラ102に備えられた制動手段によって付与されていた制動力が、弱まるように構成されている。
【0083】
「回転を規制する」とは、すなわち、回転による駆動力を制動することであり、本実施形態においては、受容ローラ64にこの制動力が作用したと同時に、制動変位ローラ102に予め加えられていた摩擦部材108による摩擦力に基づく制動力が弱められる。この両制動力をバランスさせることで、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0084】
一方、本実施形態の構成によれば、二次転写装置60における受容ローラ64と二次転写ローラ66との間に進入した用紙68が矢印C2に示すように排出される(図1、図3参照)等、受容ローラ64の回転を促進する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する制動変位ローラ102の前後において、張力t1及び張力t2の上昇が起こり、その合成力である垂直力Nも上昇して、図6に示すように中間転写ベルト90が緊張する。
【0085】
ここで、図6は、本実施形態のベルト駆動装置において、受容ローラ64の回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。図6中の点線は、外力を受ける前の各部材の位置を示すものである。
【0086】
中間転写ベルト90の緊張によって、回転軸104が長孔106内を移動して、制動変位ローラ102が周内mi方向に変位する。制動変位ローラ102の周内mi方向への変位は、前記制動手段における回転軸104との摩擦力が強まる方向への摩擦部材108の相対的な変位に相当する。そのため、本実施形態では、受容ローラ64の回転を促進する外力を受けることで、制動変位ローラ102に備えられた制動手段によって付与されていた制動力が、強まるように構成されている。
【0087】
「回転を促進する」とは、すなわち、回転による駆動力を高めることであり、本実施形態においては、受容ローラ64にこの駆動力を高める作用が生じたと同時に、制動変位ローラ102に予め加えられていた制動力が高められる。本実施形態によれば、この駆動力の向上と制動力の上昇分とが自動的にバランスされるため、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0088】
以上のように、本実施形態のベルト駆動装置によれば、予め外力の発生タイミングがわかっていない場合であっても、外力発生に伴う張力の変動を直接利用して制動力の増減に反映させているため、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御する場合に比べて、タイミングの遅れが生じ難く、精度よく外力によるベルト搬送速度の変動を抑制することができる。しかも、受容ローラ64の回転を規制する外力のみならず、該回転を促進する外力に対しても、その影響を抑えることができる。
【0089】
また、電気的な検知システムや電子制御によらず、メカニカル(機械的)な構成で実現可能のなので、低コストで目的を達成することができる。
【0090】
さらに、フライホイールのような大型の部材を使わなくても、レイアウト上の制約が少ない小型な構成で実現可能である。
【0091】
なお、図5及び図6においては、図示の便宜と説明の容易化を図る意図で、制動変位ローラ102の変位を若干大袈裟に描いている。即ち、図5においては、回転軸104が摩擦部材108と大きく離間した状態に変位しており、図6においては、回転軸104が摩擦部材108にめり込んだ状態に変位している。しかし、摩擦部材108が回転軸104に押し当てて摩擦力を生じさせることにより生ずる制動力は、その押し当てる力が変化することで増減するため、接触状態のまま微視的に変位することで変動する。
【0092】
図7は、摩擦部材108と回転軸104との位置関係を説明するための説明図であり、両者のみが拡大されて描かれている。図7(a)は定常状態であり、回転軸104が摩擦部材108に微視的に食い込んだ状態になっている。受容ローラ64が外力を受けることで中間転写ベルト90が弛緩乃至緊張すると、回転軸104が周外mo方向乃至周内mi方向に変位する。図7(b)は回転軸104が周外mo方向に変位し、摩擦部材108の回転軸104に対する摩擦力が低下して、制動力が弱まった状態を、図7(c)は回転軸104が周外mi方向に変位し、回転軸104が摩擦部材108に微視的により食い込み摩擦力が上昇して、制動力が強まった状態を、それぞれ示すものである。
【0093】
このように摩擦部材108と回転軸104とが接触状態のままの微視的な変位であっても、両者間に生ずる摩擦力が変化する限り、本発明に言う「摩擦部材の相対的な変位」に含まれる概念である。したがって、本発明において、変位が目視によって観測できることは要求されない。
【0094】
なお、図7(d)に示されるように、回転軸104と摩擦部材108とが完全に離間して、摩擦部材108による制動力が作用しなくなった状態になる変位も、図7(a)の定常状態に対して両者間に生ずる摩擦力がゼロへと変化しているのであり、勿論本発明における「摩擦部材の相対的な変位」の一態様と解される。これらの変位が適切に生ずることによって、摩擦部材108による制動力が良好に制御されるように、変位の程度を適宜調整してやればよい。
【0095】
図8に、図4に示された本実施形態のベルト駆動装置における制動変位ローラ102周辺の拡大図を示す。制動変位ローラ102の回転軸104は、中間転写ベルト90の張力t1及び張力t2が作用して生ずる垂直力Nによって摩擦部材108に押し付けられており、摩擦部材108と回転軸104との間には摩擦力Fが生じ、中間転写ベルト90の矢印B方向への駆動力抑制する制動力bになる。定常状態における摩擦力F0は、ベルト張力T0(=t1=t2)の関数として以下のように表される。
F0=μN=2T0μsinθ
【0096】
ここでNは、中間転写ベルト90の張力t1及び張力t2が作用して生ずる摩擦部材108に生じる垂直力、θは中間転写ベルト90の張り渡し角度、μは摩擦係数であり、定常状態ではこの摩擦力F0が負荷として常に中間転写ベルト90に作用している。
【0097】
受容ローラ64の回転を規制する外力を受けた際の中間転写ベルト90の弛緩によって、中間転写ベルト90の張力がT0−ΔTに減少したとすると、それに伴って摩擦部材108と回転軸104との間の摩擦力Fも、以下のように減少する。
F0−ΔF=2(T0−ΔT)μsinθ
(ΔF=2ΔTμsinθ)
【0098】
以上より、張り渡し角度θを調整することで、外力負荷の大きさに応じた制動力の変動量を調整することができる。本願発明による制動制御の作用を有効に生じさせるには、張り渡し角度θをある程度確保することが望まれるが、θ>0であれば理論上当該作用を生じさせることができる。
【0099】
張り渡し角度θの好ましい範囲は、その他の装置構成や条件(摩擦部材の材質や構成、中間転写ベルトの張力、受容ローラが受ける外力の大きさ、装置の大きさ、中間転写ベルトの取り回しの自由度等)によって異なるため、一概には言えない。これら装置構成や条件を勘案しつつ、上記式による摩擦力Fの変動メカニズムを参考に、適切な張り渡し角度θを適宜設計すればよい。ベルトの張り渡し角度の考え方については、後述する第3の実施形態においても同様である。
【0100】
なお、制動変位ローラ102や摩擦部材108の代わりに、ブレードのような固定部材を用いて直接中間転写ベルト90に制動力を加えること構成も考えられるが、上記の如くベルト張架角度θをある程度大きくすることが求められることもあり、中間転写ベルト90に大きな接触力が働くため、中間転写ベルト90の傷や磨耗が避けられない。これに対して、本実施形態では、従動ローラの回転軸に制動力を加えて間接的にベルトを制動するので、固定部材を用いて直接中間転写ベルト90に制動力を加える場合に比べて中間転写ベルト90へのダメージを少なくできる。
【0101】
摩擦部材108の材料としては、通常ブレーキパッドとして用いられる、天然ゴム、合成ゴム、シリコーンゴムを含む各種ゴム材料やエラストマー等の弾性材料、シリコーン樹脂を含む各種樹脂材料や各種金属材料等の硬質材料から適宜選択して用いればよい。
【0102】
また、本実施形態においては、制動変位ローラ(従動ローラ)102の回転軸104の変位の方向(周外mo周内mo方向)に対して、平面状の摩擦部材108の接触面が垂直に接触するように構成されているが、摩擦部材は、必ずしも垂直に接触する必要は無く、ある程度の傾きを持たせても構わない。摩擦部材に傾きを持たせることで、変位による摩擦力変化を漸次的に増減させることも可能となり、制動制御のラチチュードを広く取ることができる場合がある。
【0103】
以上説明した従動ローラの回転軸と制動手段の摩擦部材との関係や張り渡し角度θ、それらの態様、材質等は、本実施形態に限らず、後述する他の実施形態全てに適用し得るものである。そのため、以降の実施形態においては、これらの説明を一部省略する。
【0104】
(第2の実施形態)
図9に、本発明の例示的一態様である第2の実施形態のベルト駆動装置の概略構成図を示す。図9は、図1に示す画像形成装置における搬送系のみを抜き出し、これに本実施形態に特有の構成を加えたものである。本実施形態は、図1の画像形成装置における第1の領域Dに制動制御機構を備えた例である。
【0105】
中間転写ベルト90は、駆動ローラ52と、従動ローラの一例である支持ローラ54、変位ローラ212及び制動ローラ222と、受容ローラ64と、からなる複数のローラに張り渡されている。
【0106】
変位ローラ212は、軸方向両側から突出する回転軸214が、装置筺体に固定された不図示のガイドに設けられた長孔216内に挿し込まれ、中間転写ベルト90の周内mi方向及び周外mo方向に変位可能に支持されている。
【0107】
回転軸214には連結部材232の一端が回転軸214の回転自由度を損なわないように結合され、回転軸214のmi方向及びmo方向の変位が、連結部材232の他端に回転自在に結合した長尺体230の一端に伝達されるように構成されている。長尺体230はその中途に、回転自在に装置筺体に固定された支点234を有し、梃子の作用を具備している。梃子の作用を具備する長尺体230の他端には、摩擦部材228が取り付けられ、制動ローラ222の軸方向両側から突出する回転軸224を押し当てて摩擦力を生じさせることで制動力が加えられるように構成されている。制動ローラ222の回転軸224における、制動ローラ222に巻き付いた中間転写ベルト90に面する側とは反対側から押し当てる位置に摩擦部材228が配されるように、長尺体230が取り回される。
【0108】
回転軸214のmi方向及びmo方向の変位に基づく長尺体230の一端の動きは、梃子の作用によって、支点234を超えた位置では反対方向への動きに変換される。そして、その動きによって、摩擦部材228が回転軸224に対して変位する。
【0109】
変位ローラ212に巻き付いた部位の中間転写ベルト90には、回転方向(矢印B方向)上流側及び下流側に生ずる張力が作用しており、それらが合成した垂直力として、周内方向に押し込む力が変位ローラ212に作用している。この作用によって、連結部材232及び長尺体230を介して、摩擦部材228が所定の力で回転軸224に押し当てられている。
以上のように、本実施形態における制動制御機構が構成されている。
【0110】
本実施形態のベルト駆動装置は、駆動ローラ52の回転駆動によって中間転写ベルト90が矢印B方向に回転する。この時、制動ローラ222に備えられた摩擦部材228等からなる制動手段によって、中間転写ベルト90の回転には、予め制動力が付与されており、当該制動力とそれよりも大きな力の駆動ローラ52による回転駆動力とが適切にバランスされて、一定の搬送力で中間転写ベルト90が矢印B方向に回転している。
【0111】
この状態で、二次転写装置60における受容ローラ64と二次転写ローラ66との間に用紙68が矢印C1に示すように進入する(図1、図3参照)等、受容ローラ64の回転を規制する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する変位ローラ212の前後において、中間転写ベルト90の張力低下が起こり、図10に示すように中間転写ベルト90が弛緩する。
【0112】
ここで、図10は、本実施形態のベルト駆動装置において、受容ローラ64の回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。図10中の点線は、外力を受ける前の各部材の位置を示すものである。
【0113】
中間転写ベルト90の弛緩によって、回転軸214が長孔216内を移動して、変位ローラ212が周外mo方向に変位する。変位ローラ212の周外mo方向への変位は、連結部材232により、長尺体230の力点に当たる一端に伝達され、当該一端が矢印m1方向へ動く。すると、長尺体230の作用点である他端は矢印m2方向へ動き、前記制動手段における回転軸224との間の摩擦力が弱まる方向への摩擦部材228の相対的な変位となる。そのため、本実施形態では、受容ローラ64の回転を規制する外力を受けることで、制動ローラ222に備えられた制動手段によって付与されていた制動力が、弱まるように構成されている。
【0114】
本実施形態においては、受容ローラ64に外力による制動力が作用したと同時に、制動ローラ222に予め加えられていた制動力が弱められる。この両制動力をバランスさせることで、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0115】
一方、本実施形態の構成によれば、二次転写装置60における受容ローラ64と二次転写ローラ66との間に進入した用紙68が矢印C2に示すように排出される(図1、図3参照)等、受容ローラ64の回転を促進する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する変位ローラ212の前後において、中間転写ベルト90の張力上昇が起こり、図11に示すように中間転写ベルト90が緊張する。
【0116】
ここで、図11は、本実施形態のベルト駆動装置において、受容ローラ64の回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。図11中の点線は、外力を受ける前の各部材の位置を示すものである。
【0117】
中間転写ベルト90の緊張によって、回転軸214が長孔216内を移動して、変位ローラ212が周内mi方向に変位する。変位ローラ212の周内mi方向への変位は、連結部材232により長尺体230の一端に伝達され、当該一端が矢印m3方向へ動く。すると、長尺体230の他端は矢印m4方向へ動き、前記制動手段における回転軸224との摩擦力が強まる方向への摩擦部材228の相対的な変位となる。そのため、本実施形態では、受容ローラ64の回転を促進する外力を受けることで、制動ローラ222に備えられた制動手段によって付与されていた制動力が、強まるように構成されている。
【0118】
本実施形態においては、受容ローラ64に駆動力を高める作用が生じたと同時に、制動ローラ222に予め加えられていた制動力が高められる。本実施形態によれば、これら駆動力の向上と制動力の上昇分とが自動的にバランスされるため、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0119】
なお、図10及び図11において、図示の便宜と説明の容易化を図る意図で、変位ローラ212の変位を若干大袈裟に描いているのは、第1の実施形態における図5及び図6と同様である。
【0120】
以上のように、本実施形態のベルト駆動装置によれば、予め外力の発生タイミングがわかっていない場合であっても、外力発生に伴う張力の変動を直接利用して制動力の増減に反映させているため、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御する場合に比べて、タイミングの遅れが生じ難く、精度よく外力によるベルト搬送速度の変動を抑制することができる。しかも、受容ローラ64の回転を規制する外力のみならず、該回転を促進する外力に対しても、その影響を抑えることができる。
【0121】
また、電気的な検知システムや電子制御によらず、メカニカル(機械的)な構成で実現可能のなので、低コストで目的を達成することができる。
【0122】
さらに、フライホイールのような大型の部材を使わなくても、レイアウト上の制約が少ない小型な構成で実現可能である。
【0123】
また、本実施形態では、梃子の原理を応用して、変位ローラ212の変位を摩擦部材228の変位に変換しているので、梃子の作用をする長尺体230の支点234の位置の取り方により、摩擦部材228を回転軸224に押し当てる状態を制御することができる。
【0124】
即ち、図9〜図11に示されるように、本実施形態では、長尺体230における摩擦部材228寄りの位置に支点234が設けられているが、この場合、中間転写ベルト90の弛緩乃至緊張に基づく変位ローラ212の変位の力が弱くても、梃子の原理によって増幅されて摩擦部材228を回転軸224に押し当てる力に作用する。そのため、摩擦部材228による制動力を有効に働かせるように装置を調整し易い。
【0125】
この時、例えば、力点である連結部材232及び長尺体230の連結部(図中符号の無い丸部)と支点234との距離をr1、作用点である長尺体230の摩擦部材228の取付部と支点234との距離をr2とすると、中間転写ベルト90の弛緩乃至緊張に基づく変位ローラ212の変位の力がr1/r2倍に増幅されて、摩擦部材228を回転軸224に押し当てる力に作用する。
【0126】
以上のように、制動力を増幅させることができるため、例えば、第1の実施形態で説明した、変位ローラ212における中間転写ベルト90の張り渡し角度θを十分に大きくすることができない場合でも、梃子の原理を応用することで必要な制動力の変動量を確保することができる。
【0127】
(第3の実施形態)
図12に、本発明の例示的一態様である第3の実施形態のベルト駆動装置の概略構成図を示す。図12は、図1に示す画像形成装置における搬送系のみを抜き出し、これに本実施形態に特有の構成を加えたものである。本実施形態は、図1の画像形成装置における第2の領域Eに制動制御機構を備えた例である。
【0128】
中間転写ベルト90は、駆動ローラ52と、受容ローラ64と、従動ローラの一例である支持ローラ54及び制動変位ローラ302と、からなる複数のローラに張り渡されている。
【0129】
図13に、制動制御機構を含む制動変位ローラ302及びその周辺の矢印G方向から見た拡大図を示す。
【0130】
制動変位ローラ302は、軸方向両側から突出する回転軸304が、装置筺体に固定されたガイド346に設けられた長孔306内に挿し込まれ、中間転写ベルト90の周内mi方向及び周外mo方向に変位可能に支持されている。なお、図12においては、長孔306が設けられたガイド346の図示を省略している(図14及び図15においても同様である。)。
【0131】
また、制動変位ローラ302の回転軸304は、軸受344に回転自在に支持されつつ、該軸受344を介して中間転写ベルト90の周外mo方向へ、装置筺体に固定されたばね台座342に固定された弾性部材の一例であるばね340によって押し込まれている。一方、ばね340によって押し込まれる方向に対向して、摩擦部材308が配され、ばね340の押し込む力によって両側の回転軸304が摩擦部材308に押し当てて摩擦力を生じさせることで制動力が加えられて、制動手段を構成している。
【0132】
制動変位ローラ302に巻き付いた部位の中間転写ベルト90には、回転方向(矢印B方向)上流側及び下流側に生ずる張力が作用しており、それらが合成した垂直力として、周内方向に押し込む力が制動変位ローラ302に作用している。この力によって減殺された、ばね340による押し込む力が、回転軸304を摩擦部材308に押し込む力として作用する。
以上のように、本実施形態における制動制御機構が構成されている。
【0133】
本実施形態のベルト駆動装置は、駆動ローラ52の回転駆動によって中間転写ベルト90が矢印B方向に回転する。この時、制動変位ローラ302に備えられた摩擦部材308等からなる制動手段によって、中間転写ベルト90の回転には、予め制動力が付与されており、当該制動力とそれよりも大きな力の駆動ローラ52による回転駆動力とが適切にバランスされて、一定の搬送力で中間転写ベルト90が矢印B方向に回転している。
【0134】
この状態で、二次転写装置60における受容ローラ64と二次転写ローラ66との間に用紙68が矢印C1に示すように進入する(図1、図3参照)等、受容ローラ64の回転を規制する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の下流側であって駆動ローラ52の上流側に位置する制動変位ローラ302の前後において、中間転写ベルト90の張力上昇が起こり、図14に示すように中間転写ベルト90が緊張する。
【0135】
ここで、図14は、本実施形態のベルト駆動装置において、受容ローラ64の回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。図14中の点線は、外力を受ける前の各部材の位置を示すものである。
【0136】
中間転写ベルト90の緊張によって、回転軸304が長孔306内を移動して、制動変位ローラ302が周内mi方向に変位する。制動変位ローラ302の周内mi方向への変位は、回転軸304が摩擦部材308にばね340で押し付けていた力を減殺するように作用することから、全体として、回転軸304との間の摩擦力が弱まる方向への摩擦部材308の相対的な変位に相当する。そのため、本実施形態では、受容ローラ64の回転を規制する外力を受けることで、制動変位ローラ302に備えられた制動手段によって付与されていた制動力が、弱まるように構成されている。
【0137】
本実施形態においては、受容ローラ64に外力による制動力が作用したと同時に、制動変位ローラ302に予め加えられていた制動力が弱められる。この両制動力をバランスさせることで、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0138】
一方、本実施形態の構成によれば、二次転写装置60における受容ローラ64と二次転写ローラ66との間に進入した用紙68が矢印C2に示すように排出される(図1、図3参照)等、受容ローラ64の回転を促進する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の下流側であって駆動ローラ52の上流側に位置する制動変位ローラ302の前後において、中間転写ベルト90の張力低下が起こり、図15に示すように中間転写ベルト90が弛緩する。
【0139】
ここで、図15は、本実施形態のベルト駆動装置において、受容ローラ64の回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。図15中の点線は、外力を受ける前の各部材の位置を示すものである。
【0140】
中間転写ベルト90の弛緩によって、回転軸304が長孔306内を移動して、制動変位ローラ302が周外mo方向に変位する。制動変位ローラ302の周外mo方向への変位は、中間転写ベルト90の張力で周内mi方向に押し込む力を減殺するように作用し、回転軸304が摩擦部材308にばね340で押し付けていた力を相対的に上昇させることから、前記制動手段における回転軸304との摩擦力が強まる方向への摩擦部材308の相対的な変位に相当する。そのため、本実施形態では、受容ローラ64の回転を促進する外力を受けることで、制動変位ローラ302に備えられた制動手段によって付与されていた制動力が、強まるように構成されている。
【0141】
本実施形態においては、受容ローラ64に駆動力を高める作用が生じたと同時に、制動変位ローラ302に予め加えられていた制動力が高められる。本実施形態によれば、これら駆動力の向上と制動力の上昇分とが自動的にバランスされるため、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0142】
なお、図14及び図15において、図示の便宜と説明の容易化を図る意図で、制動変位ローラ302の変位を若干大袈裟に描いているのは、第1の実施形態における図5及び図6と同様である。
【0143】
以上のように、本実施形態のベルト駆動装置によれば、予め外力の発生タイミングがわかっていない場合であっても、外力発生に伴う張力の変動を直接利用して制動力の増減に反映させているため、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御する場合に比べて、タイミングの遅れが生じ難く、精度よく外力によるベルト搬送速度の変動を抑制することができる。しかも、受容ローラ64の回転を規制する外力のみならず、該回転を促進する外力に対しても、その影響を抑えることができる。
【0144】
また、電気的な検知システムや電子制御によらず、メカニカル(機械的)な構成で実現可能のなので、低コストで目的を達成することができる。
【0145】
さらに、フライホイールのような大型の部材を使わなくても、レイアウト上の制約が少ない小型な構成で実現可能である。
【0146】
(第4の実施形態)
図16に、本発明の例示的一態様である第4の実施形態のベルト駆動装置の概略構成図を示す。図16は、図1に示す画像形成装置における搬送系のみを抜き出し、これに本実施形態に特有の構成を加えたものである。本実施形態は、図1の画像形成装置における第2の領域Eに制動制御機構を備えた例である。
【0147】
中間転写ベルト90は、駆動ローラ52と、従動ローラの一例である支持ローラ54、変位ローラ412及び制動ローラ422と、受容ローラ64と、からなる複数のローラに張り渡されている。
【0148】
図17に、制動制御機構を含む制動変位ローラ302及びその周辺の矢印H方向から見た拡大図を示す。
【0149】
変位ローラ412は、軸方向両側から突出する回転軸414が、装置筺体に固定されたガイド446に設けられた長孔416内に挿し込まれ、中間転写ベルト90の周内mi方向及び周外mo方向に変位可能に支持されている。なお、図16においては、長孔416が設けられたガイド446の図示を省略している(図18及び図19においても同様である。)。
【0150】
また、変位ローラ412の回転軸404は、軸受444に回転自在に支持されつつ、該軸受444を介して中間転写ベルト90の周外mo方向へ、装置筺体に固定されたばね台座442に固定された弾性部材の一例であるばね440によって押し込まれている。
【0151】
回転軸414には連結部材432の一端が回転軸414の回転自由度を損なわないように結合され、回転軸414のmi方向及びmo方向の変位が、連結部材432の他端に回転自在に結合した長尺体430の一端に伝達されるように構成されている。長尺体430はその中途に、回転自在に装置筺体に固定された支点434を有し、梃子の作用を具備している。梃子の作用を具備する長尺体430の他端には、摩擦部材428が取り付けられ、制動ローラ422の軸方向両側から突出する回転軸424に接触している。制動ローラ422の回転軸424における、制動ローラ422に巻き付いた中間転写ベルト90に面する側に摩擦部材428が位置するように、長尺体430が取り回される。
【0152】
回転軸414のmi方向及びmo方向の変位に基づく長尺体430の一端の動きは、梃子の作用によって、支点434を超えた位置では反対方向への動きに変換される。そして、その動きによって、摩擦部材428が回転軸424に対して変位する。
【0153】
変位ローラ412に巻き付いた部位の中間転写ベルト90には、回転方向(矢印B方向)上流側及び下流側に生ずる張力が作用しており、それらが合成した垂直力として、周内方向に押し込む力が変位ローラ412に作用している。この周内方向に押し込む力と、ばね440によって回転軸414を押し込む力とが、後者の力の方が大きくなるようにバランスされて、前者の力により減殺された後者の力が、連結部材432及び長尺体430を介して回転軸424に接触している摩擦部材428に作用する。この作用によって、摩擦部材428が回転軸424に押し当てられて摩擦力を生じ、制動力が加えられている。
以上のように、本実施形態における制動制御機構が構成されている。
【0154】
本実施形態のベルト駆動装置は、駆動ローラ52の回転駆動によって中間転写ベルト90が矢印B方向に回転する。この時、制動ローラ422に備えられた摩擦部材428等からなる制動手段によって、中間転写ベルト90の回転には、予め制動力が付与されており、当該制動力とそれよりも大きな力の駆動ローラ52による回転駆動力とが適切にバランスされて、一定の搬送力で中間転写ベルト90が矢印B方向に回転している。
【0155】
この状態で、二次転写装置60における受容ローラ64と二次転写ローラ66との間に用紙68が矢印C1に示すように進入する(図1、図3参照)等、受容ローラ64の回転を規制する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の下流側であって駆動ローラ52の上流側に位置する変位ローラ412の前後において、中間転写ベルト90の張力上昇が起こり、図18に示すように中間転写ベルト90が緊張する。
【0156】
ここで、図18は、本実施形態のベルト駆動装置において、受容ローラ64の回転を規制する外力を受けた際の各部材の動きを示す概略説明図である。図18中の点線は、外力を受ける前の各部材の位置を示すものである。なお、図18においては、軸受444、ばね440及びばね台座442の図示を省略している(図19においても同様である。)。
【0157】
中間転写ベルト90の緊張によって、回転軸414が長孔416内を移動して、変位ローラ412が周内mi方向に変位する。変位ローラ212の周内mi方向への変位は、連結部材432により、長尺体430の力点に当たる一端に伝達され、当該一端が矢印m5方向へ動く。すると、長尺体430の作用点である他端は矢印m6方向へ動き、前記制動手段における回転軸424との間の摩擦力が弱まる方向への摩擦部材428の相対的な変位となる。そのため、本実施形態では、受容ローラ64の回転を規制する外力を受けることで、制動ローラ422に備えられた制動手段によって付与されていた制動力が、弱まるように構成されている。
【0158】
本実施形態においては、受容ローラ64に外力による制動力が作用したと同時に、制動ローラ422に予め加えられていた制動力が弱められる。この両制動力をバランスさせることで、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0159】
一方、本実施形態の構成によれば、二次転写装置60における受容ローラ64と二次転写ローラ66との間に進入した用紙68が矢印C2に示すように排出される(図1、図3参照)等、受容ローラ64の回転を促進する外力が加わると、中間転写ベルト90の進行方向(矢印B方向)における、受容ローラ64の上流側であって駆動ローラ52の下流側に位置する変位ローラ412の前後において、中間転写ベルト90の張力低下が起こり、図19に示すように中間転写ベルト90が弛緩する。
【0160】
ここで、図19は、本実施形態のベルト駆動装置において、受容ローラ64の回転を促進する外力を受けた際の各部材の動きを示す概略説明図である。図19中の点線は、外力を受ける前の各部材の位置を示すものである。
【0161】
中間転写ベルト90の弛緩によって、回転軸414が長孔416内を移動して、変位ローラ412が周外mo方向に変位する。変位ローラ412の周外mo方向への変位は、連結部材432により長尺体430の一端に伝達され、当該一端が矢印m7方向へ動く。すると、長尺体430の他端は矢印m8方向へ動き、前記制動手段における回転軸424との摩擦力が強まる方向への摩擦部材428の相対的な変位となる。そのため、本実施形態では、受容ローラ64の回転を促進する外力を受けることで、制動ローラ422に備えられた制動手段によって付与されていた制動力が、強まるように構成されている。
【0162】
本実施形態においては、受容ローラ64に駆動力を高める作用が生じたと同時に、制動ローラ222に予め加えられていた制動力が高められる。本実施形態によれば、これら駆動力の向上と制動力の上昇分とが自動的にバランスされるため、中間転写ベルト90全体で見れば、加えられた制動力の合計は、外力を受けた前後で変化せず、あるいは、変化が抑制され、ベルト搬送速度の変動が無い、あるいは、変動が抑制される。
【0163】
なお、図18及び図19において、図示の便宜と説明の容易化を図る意図で、変位ローラ412の変位を若干大袈裟に描いているのは、第1の実施形態における図5及び図6と同様である。
【0164】
以上のように、本実施形態のベルト駆動装置によれば、予め外力の発生タイミングがわかっていない場合であっても、外力発生に伴う張力の変動を直接利用して制動力の増減に反映させているため、中間転写ベルトの速度変動を検知してその結果から中間転写ベルトの駆動モータの駆動速度をフィードバック制御する場合に比べて、タイミングの遅れが生じ難く、精度よく外力によるベルト搬送速度の変動を抑制することができる。しかも、受容ローラ64の回転を規制する外力のみならず、該回転を促進する外力に対しても、その影響を抑えることができる。
【0165】
また、電気的な検知システムや電子制御によらず、メカニカル(機械的)な構成で実現可能のなので、低コストで目的を達成することができる。
【0166】
さらに、フライホイールのような大型の部材を使わなくても、レイアウト上の制約が少ない小型な構成で実現可能である。
【0167】
また、本実施形態では、梃子の原理を応用して、変位ローラ412の変位を摩擦部材428の変位に変換しているので、梃子の作用をする長尺体430の支点434の位置の取り方により、摩擦部材428を回転軸424へに押し当てる状態を制御することができる。
【0168】
即ち、図16、図18及び図19に示されるように、本実施形態では、長尺体430における摩擦部材428寄りの位置に支点434が設けられているが、この場合、中間転写ベルト90の弛緩乃至緊張に基づく変位ローラ412の変位の力が弱くても、梃子の原理によって増幅されて摩擦部材428を回転軸224に押し当てる力に作用する。そのため、摩擦部材428による制動力を有効に働かせるように装置を調整し易い。この増幅の程度としては、第3の実施形態で説明したとおりである。
【0169】
以上のように、制動力を増幅させることができるため、例えば、第1の実施形態で説明した、変位ローラ412における中間転写ベルト90の張り渡し角度θを十分に大きくすることができない場合でも、梃子の原理を応用することで必要な制動力の変動量を確保することができる。
【0170】
[総括]
以上、本発明について、4つの好ましい実施形態を挙げて説明したが、本発明のベルト駆動装置はこれら実施形態の構成に限定されるものではない。
【0171】
例えば、以上の実施形態では、図1の画像形成装置における第1の領域Dと第2の領域Eのいずれか一方に制動制御機構を備えた例のみを例示しているが、本発明においては、無端ベルトの回転方向における受容ローラの上流かつ駆動ローラの下流の第1の領域と、前記受容ローラの下流かつ前記駆動ローラの上流の第2の領域の双方に、制動制御機構を備えた構成であっても構わない。双方に制動制御機構を備えることで、どちらか一方のみでは、変位可能に支持された従動ローラの変位から変換された摩擦部材の変位に基づく制動力の変化量が、外力による受容ローラの規制乃至促進に基づく制動乃至駆動促進に対応することが困難な場合にも、その変化量を広げることができるため、対応が可能になる。
【0172】
例えば、第1の実施形態において説明したベルト張り渡し角度θを十分に大きく取ることが、スペースの関係上困難な場合に、第1の領域と第2の領域の双方に制動制御機構を設けることで、制動力の変化量を大きく取ることができ、本発明の優れた効果を実現することができる。
【0173】
第1の領域と第2の領域の双方に制動制御機構を設ける場合、両制動制御機構の構成に制限は無く、例えば、第1の領域に第1の実施形態及び第2の実施形態の構成のいずれを採用してもよいし、第2の領域に第3の実施形態及び第4の実施形態の構成のいずれを採用してもよいし、それぞれそれ以外の変形例の構成を採用してもよく、適宜選択して組み合わせて設計すればよい。
【0174】
さらに、第1の領域と第2の領域のいずれか一方、若しくは双方に、複数の制動制御機構を設けても構わない。設けた数の分だけ、制動力の変化量を大きく取ることができる。ただし、あまりに大型にするとスペース的に不利であり、また、装置設計も却って複雑になる。また、これらの観点から、複数の制動制御機構を設ける場合には、第1の領域と第2の領域に分けて設けることが好ましい。
【0175】
一方、本発明のベルト駆動装置を適用した本発明の画像形成装置について、上記実施形態では、いわゆるタンデム方式のフルカラー画像形成装置を例に挙げて説明したが、本発明においてはこれに限定されるものでは無く、1つの像保持体表面に複数の色のトナー像を形成し得る回転切替形の現像装置を用いて、複数の色のトナー像を現像しつつ、その都度中間転写体表面に積層し、全色積層後一括して記録媒体に転写してフルカラー画像を形成する、いわゆるロータリー方式の画像形成装置や、単一のトナー像形成手段しか有さない単色の画像形成装置であっても、本発明のベルト駆動装置を適用することができる。
【0176】
その他、当業者は、従来公知の知見に従い、本発明のベルト駆動装置及び画像形成装置を適宜改変することができる。かかる改変によってもなお本発明のベルト駆動装置乃至画像形成装置の構成を具備する限り、勿論、本発明の範疇に含まれるものである。
【産業上の利用可能性】
【0177】
本発明のベルト駆動装置は、上記実施形態では画像形成装置における中間転写ベルトの搬送に適用する例が例示されているが、その他画像形成装置において、複数のローラに張り渡された無端状のベルトを搬送するとともに、当該複数のローラのいずれかが外力を受容する構成を含む場合に、当該無端状のベルトのベルト搬送装置として適用可能である。
【0178】
画像形成装置における中間転写ベルトは、複数のローラに張り渡された状態で、感光体ドラムの如き潜像保持体に対向する位置の中間転写ベルトの周内に転写手段を設けて、ベルトユニットとして取引、搬送、利用される場合がある。本発明のベルト駆動装置は、そのようなベルトユニットにも勿論適用することができる。そして、本発明のベルト駆動装置を中間転写ベルトの搬送に用いた当該ベルトユニットは、本発明のベルトユニットに相当する。
【0179】
即ち、本発明のベルトユニットは、
本発明のベルト駆動装置と、
表面にトナー像を保持し前記ベルトの外周面に接触して配置される像保持体に対向する位置に、前記ベルトの内周面側に設けられた転写手段と、
を備え、
前記像保持体表面のトナー像が、前記転写手段によって前記ベルトの外周面に転写されるように構成されてなることを特徴とするものである。
【符号の説明】
【0180】
2:感光体ドラム、 4:帯電装置、 6:露光装置、 8:現像装置、 12:除電ランプ、 14:一次転写装置、 22:クリーニング装置、 48:作像ユニット、 52:駆動ローラ、 54:支持ローラ、 58:搬送ガイド、 60:二次転写装置、 62:定着装置、 64:受容ローラ、 66:二次転写ローラ、 68:用紙、 90:中間転写ベルト、 102,302:制動変位ローラ、 104,214,224,304,414,424:回転軸、 106,216,306,416:長孔、 108,228,308,428:摩擦部材、 212,412:変位ローラ、 222,422:制動ローラ、 230,430:長尺体、 232,432:連結部材、 234,434:支点、340,440:ばね、 342:ばね台座,442、 344,444:軸受、 346,446:ガイド
【特許請求の範囲】
【請求項1】
複数のローラに張り渡された無端状のベルトと、
前記ローラの1つであって、前記ベルトを回転駆動する駆動ローラと、
前記ローラの他の1つであって、前記ベルトを介して加えられた外力を受容する受容ローラと、
残りの前記ローラであって、前記ベルトに従動して回転し、少なくとも1個が、当該ベルトの張力に従って該ベルトの周内外方向に変位可能に支持された、1個または2個以上の従動ローラと、
該従動ローラの内のいずれかの回転軸に相対的に摩擦部材を押し当てて摩擦力を生じさせることで制動するとともに、前記受容ローラの回転を規制する外力を受けた際に、前記ベルトの回転方向における、前記受容ローラの上流側かつ前記駆動ローラの下流側の領域の当該ベルトが弛緩し、前記受容ローラの下流側かつ前記駆動ローラの上流側の領域の当該ベルトが緊張する作用で生ずる、前記変位可能に支持された従動ローラの変位を、前記回転軸との摩擦力が弱まる方向への当該摩擦部材の相対的な変位に変換する機構を有する制動手段と、
を備えることを特徴とするベルト駆動装置。
【請求項2】
前記ベルトの回転方向における前記受容ローラの上流かつ前記駆動ローラの下流の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラが配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、前記変位可能に支持された従動ローラの前記ベルトの周外方向への変位を、前記回転軸と前記摩擦部材との相対的な変位に変換する機構であることを特徴とする請求項1に記載のベルト駆動装置。
【請求項3】
前記摩擦部材が、前記変位可能に支持された従動ローラに備えられており、
前記制動手段における機構は、前記従動ローラの前記回転軸への前記摩擦部材による摩擦力が、当該変位可能な従動ローラが前記ベルトの張力によりその周内方向に押し込まれる力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする請求項2に記載のベルト駆動装置。
【請求項4】
前記摩擦部材が、前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側とは反対側から押し当てる位置に前記摩擦部材が配されるとともに、前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする請求項2に記載のベルト駆動装置。
【請求項5】
前記ベルトの回転方向における前記受容ローラの下流かつ前記駆動ローラの上流の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラが配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、前記変位可能に支持された従動ローラの前記ベルトの周内方向への変位を、前記回転軸と前記摩擦部材との相対的な変位に変換する機構であることを特徴とする請求項1に記載のベルト駆動装置。
【請求項6】
前記摩擦部材が、前記変位可能に支持された従動ローラに備えられており、
前記制動手段における機構は、前記従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持されるとともに、当該回転軸への前記摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする請求項5に記載のベルト駆動装置。
【請求項7】
前記摩擦部材が、前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持され、当該回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側から押し当てる位置に前記摩擦部材が配され、当該回転軸への当該摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされるとともに、前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする請求項5に記載のベルト駆動装置。
【請求項8】
前記ベルトの回転方向における前記受容ローラの上流かつ前記駆動ローラの下流の第1の領域と、前記受容ローラの下流かつ前記駆動ローラの上流の第2の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラがそれぞれ配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、第1の領域に配された前記変位可能に支持された従動ローラの前記ベルトの周外方向への変位を、第1の領域に配された前記摩擦部材を備えた従動ローラにおける前記回転軸と当該摩擦部材との相対的な変位に変換する機構、及び、第2の領域に配された前記変位可能に支持された従動ローラの前記ベルトの周内方向への変位を、第2の領域に配された前記摩擦部材を備えた従動ローラにおける前記回転軸と当該摩擦部材との相対的な変位に変換する機構であることを特徴とする請求項1に記載のベルト駆動装置。
【請求項9】
第1の領域における前記摩擦部材が、第1の領域に配された前記変位可能に支持された従動ローラに備えられており、
該従動ローラの前記回転軸への前記摩擦部材による摩擦力が、当該変位可能な従動ローラが前記ベルトの張力によりその周内方向に押し込まれる力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする請求項8に記載のベルト駆動装置。
【請求項10】
第1の領域における前記摩擦部材が、第1の領域に配された前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
第1の領域に配された前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側とは反対側から押し当てる位置に前記摩擦部材が配されるとともに、第1の領域に配された前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする請求項8に記載のベルト駆動装置。
【請求項11】
第2の領域における前記摩擦部材が、第2の領域に配された前記変位可能に支持された従動ローラに備えられており、
第2の領域に配された前記制動手段における機構は、前記従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持されるとともに、当該回転軸への前記摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする請求項8〜10のいずれかに記載のベルト駆動装置。
【請求項12】
第2の領域における前記摩擦部材が、第2の領域に配された前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
第2の領域に配された前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持され、当該回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側から押し当てる位置に前記摩擦部材が配され、当該回転軸への当該摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされるとともに、第2の領域に配された前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする請求項8〜10のいずれかに記載のベルト駆動装置。
【請求項13】
請求項1〜12のいずれかに記載のベルト駆動装置と、
表面にトナー像を保持し前記ベルトの外周面に接触して配置される像保持体に対向する位置に、前記ベルトの内周面側に設けられた転写手段と、
を備え、
前記像保持体表面のトナー像が、前記転写手段によって前記ベルトの外周面に転写されるように構成されてなることを特徴とするベルトユニット。
【請求項14】
像保持体と、該像保持体表面にトナー像を形成するトナー像形成手段と、複数のローラに張り渡された無端状の中間転写ベルトと、該中間転写ベルトの外周面に前記像保持体表面に形成されたトナー像を転写する一次転写手段と、前記複数のローラの内の1つに前記中間転写ベルトを挟んで転写ローラが押し当てられて、前記中間転写ベルトの外周面に形成されたトナー像を外部から供給される記録媒体に転写する二次転写手段と、を備え、
前記複数のローラの内、前記中間転写ベルトを挟んで前記転写ローラが圧接されるローラを受容ローラ、他の1つを駆動ローラ、残りのローラを従動ローラとする請求項1〜12のいずれかに記載のベルト駆動装置によって前記中間転写ベルトを無端状のベルトとして駆動することを特徴とする画像形成装置。
【請求項1】
複数のローラに張り渡された無端状のベルトと、
前記ローラの1つであって、前記ベルトを回転駆動する駆動ローラと、
前記ローラの他の1つであって、前記ベルトを介して加えられた外力を受容する受容ローラと、
残りの前記ローラであって、前記ベルトに従動して回転し、少なくとも1個が、当該ベルトの張力に従って該ベルトの周内外方向に変位可能に支持された、1個または2個以上の従動ローラと、
該従動ローラの内のいずれかの回転軸に相対的に摩擦部材を押し当てて摩擦力を生じさせることで制動するとともに、前記受容ローラの回転を規制する外力を受けた際に、前記ベルトの回転方向における、前記受容ローラの上流側かつ前記駆動ローラの下流側の領域の当該ベルトが弛緩し、前記受容ローラの下流側かつ前記駆動ローラの上流側の領域の当該ベルトが緊張する作用で生ずる、前記変位可能に支持された従動ローラの変位を、前記回転軸との摩擦力が弱まる方向への当該摩擦部材の相対的な変位に変換する機構を有する制動手段と、
を備えることを特徴とするベルト駆動装置。
【請求項2】
前記ベルトの回転方向における前記受容ローラの上流かつ前記駆動ローラの下流の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラが配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、前記変位可能に支持された従動ローラの前記ベルトの周外方向への変位を、前記回転軸と前記摩擦部材との相対的な変位に変換する機構であることを特徴とする請求項1に記載のベルト駆動装置。
【請求項3】
前記摩擦部材が、前記変位可能に支持された従動ローラに備えられており、
前記制動手段における機構は、前記従動ローラの前記回転軸への前記摩擦部材による摩擦力が、当該変位可能な従動ローラが前記ベルトの張力によりその周内方向に押し込まれる力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする請求項2に記載のベルト駆動装置。
【請求項4】
前記摩擦部材が、前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側とは反対側から押し当てる位置に前記摩擦部材が配されるとともに、前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする請求項2に記載のベルト駆動装置。
【請求項5】
前記ベルトの回転方向における前記受容ローラの下流かつ前記駆動ローラの上流の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラが配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、前記変位可能に支持された従動ローラの前記ベルトの周内方向への変位を、前記回転軸と前記摩擦部材との相対的な変位に変換する機構であることを特徴とする請求項1に記載のベルト駆動装置。
【請求項6】
前記摩擦部材が、前記変位可能に支持された従動ローラに備えられており、
前記制動手段における機構は、前記従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持されるとともに、当該回転軸への前記摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする請求項5に記載のベルト駆動装置。
【請求項7】
前記摩擦部材が、前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持され、当該回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側から押し当てる位置に前記摩擦部材が配され、当該回転軸への当該摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされるとともに、前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする請求項5に記載のベルト駆動装置。
【請求項8】
前記ベルトの回転方向における前記受容ローラの上流かつ前記駆動ローラの下流の第1の領域と、前記受容ローラの下流かつ前記駆動ローラの上流の第2の領域に、前記摩擦部材を備えた従動ローラ及び前記変位可能に支持された従動ローラがそれぞれ配され、
前記制動手段における機構が、前記受容ローラの回転を規制する外力を受けた際に生ずる、第1の領域に配された前記変位可能に支持された従動ローラの前記ベルトの周外方向への変位を、第1の領域に配された前記摩擦部材を備えた従動ローラにおける前記回転軸と当該摩擦部材との相対的な変位に変換する機構、及び、第2の領域に配された前記変位可能に支持された従動ローラの前記ベルトの周内方向への変位を、第2の領域に配された前記摩擦部材を備えた従動ローラにおける前記回転軸と当該摩擦部材との相対的な変位に変換する機構であることを特徴とする請求項1に記載のベルト駆動装置。
【請求項9】
第1の領域における前記摩擦部材が、第1の領域に配された前記変位可能に支持された従動ローラに備えられており、
該従動ローラの前記回転軸への前記摩擦部材による摩擦力が、当該変位可能な従動ローラが前記ベルトの張力によりその周内方向に押し込まれる力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする請求項8に記載のベルト駆動装置。
【請求項10】
第1の領域における前記摩擦部材が、第1の領域に配された前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
第1の領域に配された前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側とは反対側から押し当てる位置に前記摩擦部材が配されるとともに、第1の領域に配された前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする請求項8に記載のベルト駆動装置。
【請求項11】
第2の領域における前記摩擦部材が、第2の領域に配された前記変位可能に支持された従動ローラに備えられており、
第2の領域に配された前記制動手段における機構は、前記従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持されるとともに、当該回転軸への前記摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされる機構であることを特徴とする請求項8〜10のいずれかに記載のベルト駆動装置。
【請求項12】
第2の領域における前記摩擦部材が、第2の領域に配された前記変位可能に支持された従動ローラとは別の従動ローラに備えられており、
第2の領域に配された前記制動手段における機構は、前記摩擦部材を備えた従動ローラの前記回転軸が、前記ベルトの周内から周外方向へ弾性部材で押し込まれつつ回転自在に支持され、当該回転軸における、当該従動ローラに巻き付いた前記ベルトに面する側から押し当てる位置に前記摩擦部材が配され、当該回転軸への当該摩擦部材による摩擦力が、前記弾性部材が当該回転軸を押し込む力によって、当該回転軸が当該摩擦部材に押し付けられることでもたらされるとともに、第2の領域に配された前記変位可能に支持された従動ローラの変位によって、中途に支点を有し梃子の作用をする長尺体の一端を動かし、その際の当該長尺体の他端の動きによって、前記摩擦部材を変位させる機構であることを特徴とする請求項8〜10のいずれかに記載のベルト駆動装置。
【請求項13】
請求項1〜12のいずれかに記載のベルト駆動装置と、
表面にトナー像を保持し前記ベルトの外周面に接触して配置される像保持体に対向する位置に、前記ベルトの内周面側に設けられた転写手段と、
を備え、
前記像保持体表面のトナー像が、前記転写手段によって前記ベルトの外周面に転写されるように構成されてなることを特徴とするベルトユニット。
【請求項14】
像保持体と、該像保持体表面にトナー像を形成するトナー像形成手段と、複数のローラに張り渡された無端状の中間転写ベルトと、該中間転写ベルトの外周面に前記像保持体表面に形成されたトナー像を転写する一次転写手段と、前記複数のローラの内の1つに前記中間転写ベルトを挟んで転写ローラが押し当てられて、前記中間転写ベルトの外周面に形成されたトナー像を外部から供給される記録媒体に転写する二次転写手段と、を備え、
前記複数のローラの内、前記中間転写ベルトを挟んで前記転写ローラが圧接されるローラを受容ローラ、他の1つを駆動ローラ、残りのローラを従動ローラとする請求項1〜12のいずれかに記載のベルト駆動装置によって前記中間転写ベルトを無端状のベルトとして駆動することを特徴とする画像形成装置。
【図1】


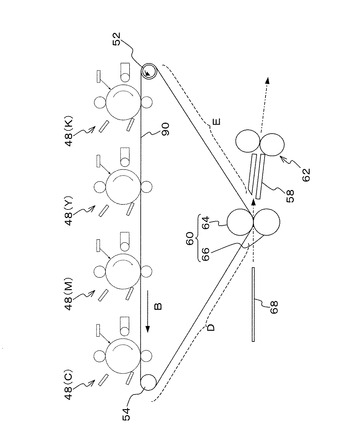
【図2】
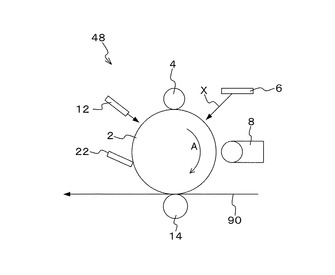
【図3】
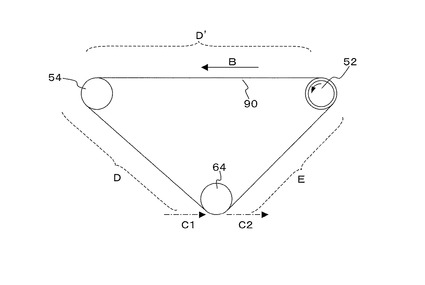
【図4】
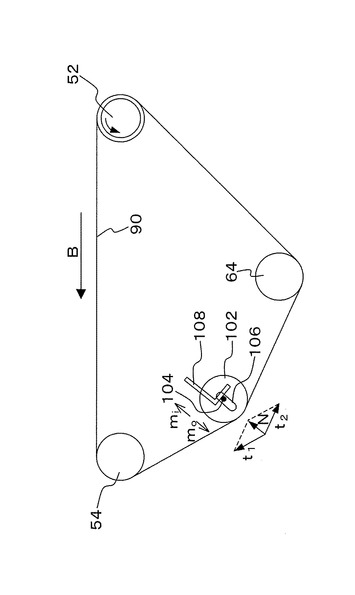
【図5】
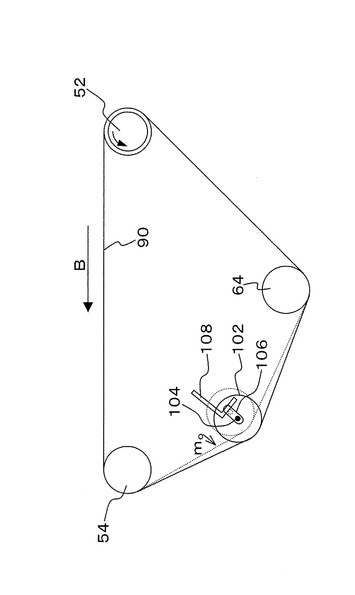
【図6】
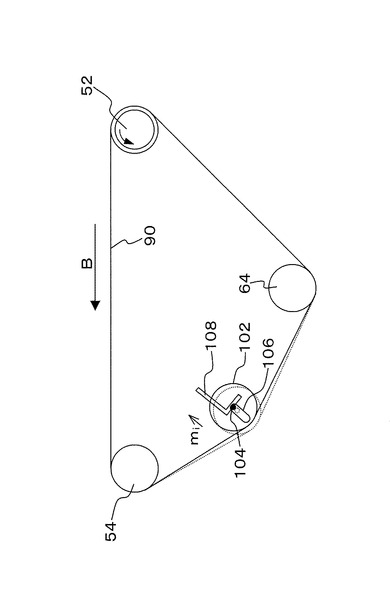
【図7】
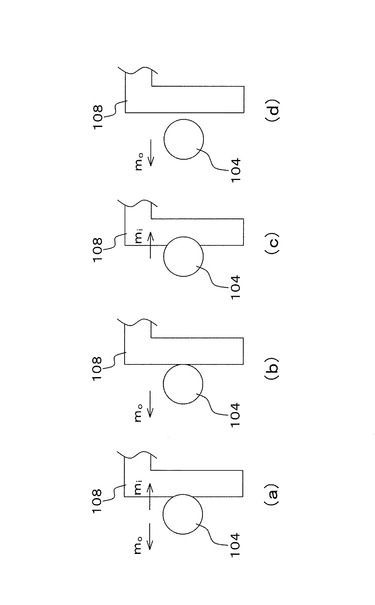
【図8】
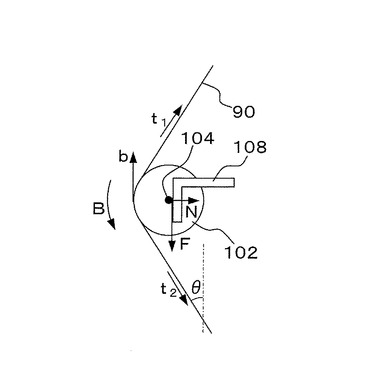
【図9】
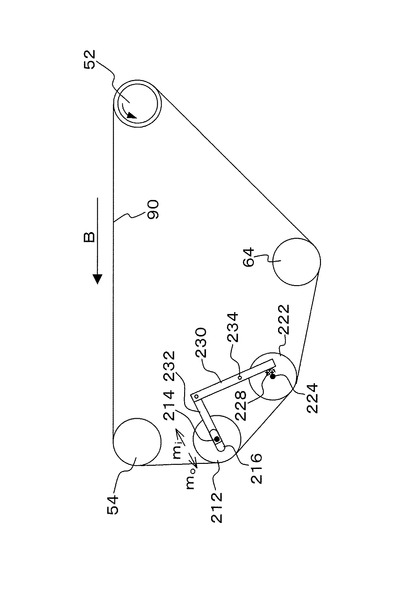
【図10】
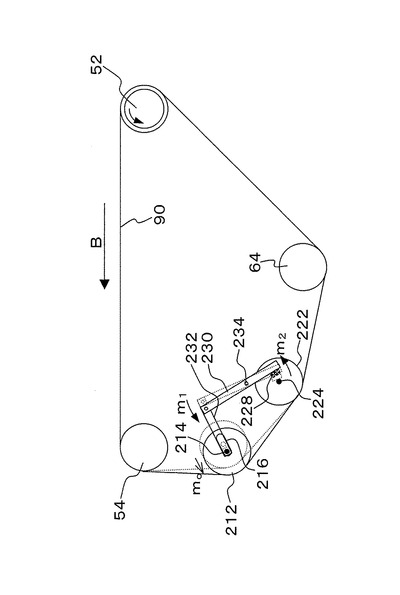
【図11】
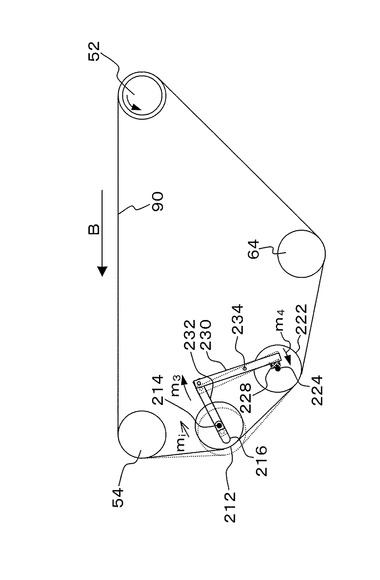
【図12】
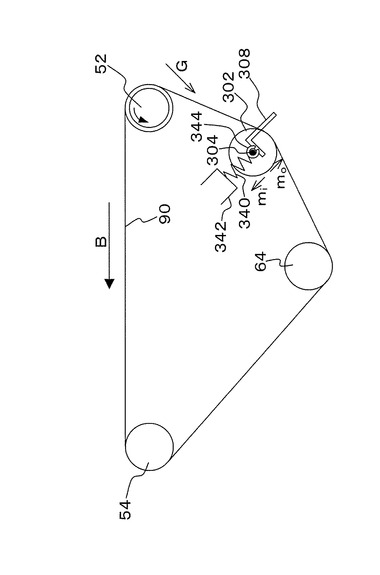
【図13】
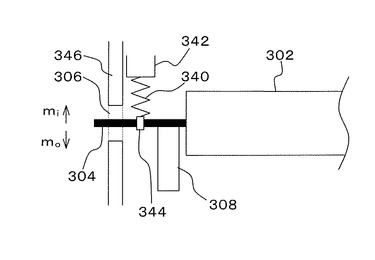
【図14】
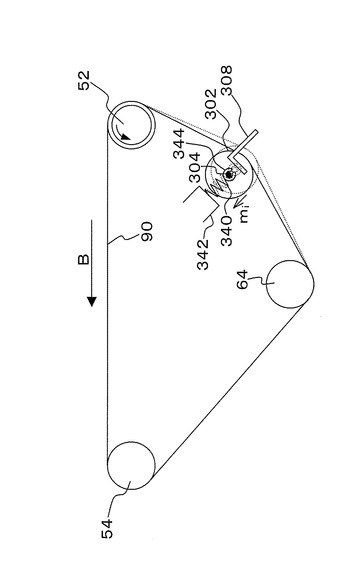
【図15】
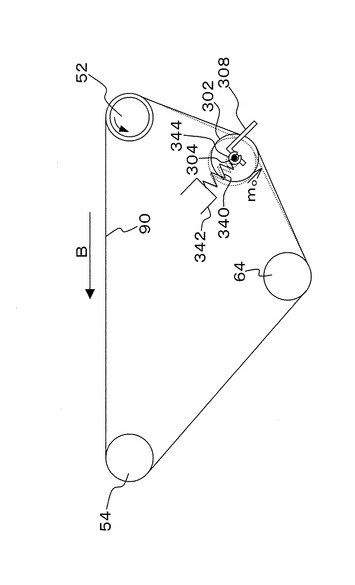
【図16】
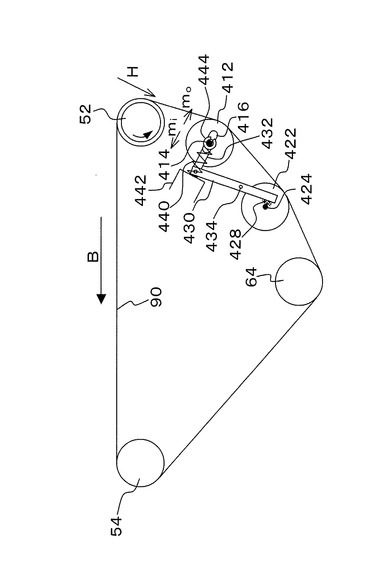
【図17】
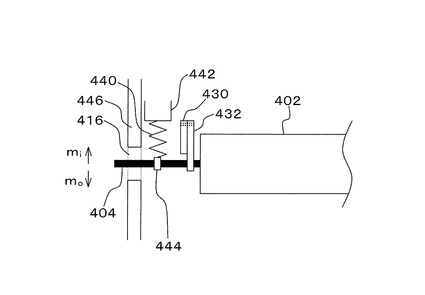
【図18】
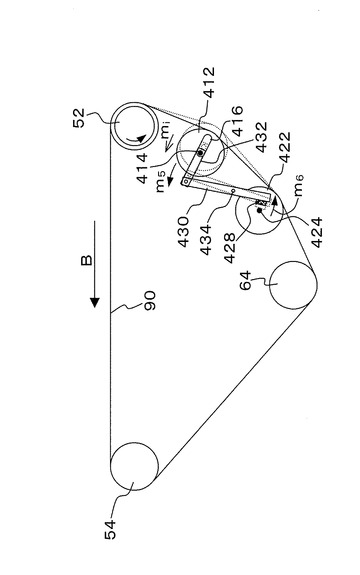
【図19】
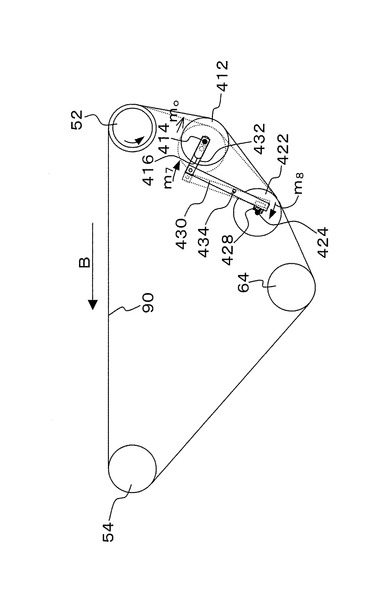
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2012−103413(P2012−103413A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−250805(P2010−250805)
【出願日】平成22年11月9日(2010.11.9)
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月9日(2010.11.9)
【出願人】(000005496)富士ゼロックス株式会社 (21,908)
【Fターム(参考)】
[ Back to top ]