
ペット誘導ロボットおよびペット誘導方法
【課題】人間が付き添うことなくペットの誘導を行うペット誘導ロボットを提供すること。
【解決手段】移動可能なロボット本体部11とペット装着部12およびリード13とからなるペット誘導ロボット10であって、周囲の情報を収集する外部情報収集手段21で得た情報から周囲状況を推定する外部環境認識手段22と、前記リードの張力と長さを収集するリード状態収集手段23と、前記外部環境認識手段22とリード状態収集手段23からペットの運動状況を推定するペット状況推定手段24と、ペットの目標経路を格納する経路情報記憶手段25と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段26と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段27と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段29とを備える。
【解決手段】移動可能なロボット本体部11とペット装着部12およびリード13とからなるペット誘導ロボット10であって、周囲の情報を収集する外部情報収集手段21で得た情報から周囲状況を推定する外部環境認識手段22と、前記リードの張力と長さを収集するリード状態収集手段23と、前記外部環境認識手段22とリード状態収集手段23からペットの運動状況を推定するペット状況推定手段24と、ペットの目標経路を格納する経路情報記憶手段25と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段26と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段27と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段29とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はペットの誘導を行うペット誘導ロボットおよびその方法に関するものである。
【背景技術】
【0002】
近年の少子高齢化、核家族化などの進展により、犬などのペットは、防犯や留守番の役割のみならず、生活に潤いや安らぎ、楽しさを与える存在として期待されている。その一方で、ペットを飼うことには、当然いろいろな手間がかかる。これらの手間、世話は、ペットを飼う楽しさそのものでもあるが、飼い主の生活環境、状況によっては、非常に大きな負担としてのしかかってくることになる。特に、犬などのペットの散歩は、高齢者や療養中の人などにとっては、ペット用のリードを手に保持して、ペットの歩行速度や移動方向をコントロールすることは体力的に困難である。また、雨が降っている状況などでは、片手に傘を持ち、もう一方の手でペット用のリードを保持することになる。さらに、単身世帯などは特に、一人でさまざまな家事を行いつつ、社会生活を送る必要があり、時間的に散歩の時間をとることが難しい場合もある。
【0003】
このようなペットの散歩の負担を軽減させるために、従来のペットを誘導する装置として、先行者である飼い主が携行する送信機から送信される誘導信号を受信する左右一対の受信機を備え、その各受信機が受信する誘導信号の強弱とその差によって送信機の位置と方向を検知し、前輪を左右に操舵し且つ後輪の駆動速度を自動制御して、先行者と一定の距離を保って追尾するものがある(例えば、特許文献1参照)。
【特許文献1】特開平10−171533号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、前記従来の構成では、先行者である飼い主が携行する送信機から送信される誘導信号を受信する左右一対の受信機を備え、その各受信機が受信する誘導信号の強弱とその差によって送信機の位置と方向を検知し、前輪を左右に操舵し且つ後輪の駆動速度を自動制御するので、飼い主またはそれに代わる人間は、ペット用のリードを手に保持して、ペットの歩行速度や移動方向をコントロールする必要はないが、ペットの散歩に必ず付き添う必要があるという課題を有していた。
【0005】
本発明は、前記従来の課題を解決するもので、人間の代わりに、ペットの状況やその周囲状況、過去の散歩時の履歴情報をもとに散歩の計画をたて、その計画の経路に基づきペットの歩行速度と進行方向を制御することで、人間が付き添うことなくペットの散歩を実現するペット誘導ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
前記従来の課題を解決するために、本願発明にかかるペット誘導ロボットは、移動可能なロボット本体部とペット装着部および前記ロボット本体部と前記ペット装着部をつなぐリードとからなるペット誘導ロボットであって、前記ロボット本体部は、周囲の情報を収集する外部情報収集手段と、前記収集情報に応じて前記ロボット本体部の周囲状況を推定する外部環境認識手段と、前記リードの張力と長さを収集するリード状態収集手段と、前記外部環境認識手段とリード状態収集手段からペットの運動状況を推定するペット状況推定手段と、ペットの目標経路を格納する経路情報記憶手段と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段とを備え、ペットの状況やその周囲状況、過去の散歩時の履歴情報をもとに散歩の計画をたて、その計画の経路に基づきペットの歩行速度と進行方向の制御を行う。
【0007】
また、前記ペット装着部は、首輪または胴輪であってもよい。
【0008】
また、前記経路計画手段で前記ロボット本体部を停止する指令が決定された場合に地面に対して前記ロボット本体部を固定する係留手段を有する構成であってもよい。
【0009】
また、前記経路情報記憶手段が、ペットもしくは前記ペット誘導ロボットの過去の運動の履歴情報によって格納する情報が更新されるという構成であってもよい。
【0010】
さらに、前記経路情報記憶手段が、外部から送信された経路情報を受信して、前記経路情報を入力する経路情報入力手段を有する構成であってもよい。
【0011】
また、ネットワークとの通信手段をさらに有し、前記経路情報入力手段は、ネットワークを介してユーザの情報端末から送信された前記経路情報を前記受信する構成であってもよい。
【0012】
また、前記ペット装着部に刺激発生装置を備え、この装置が発生する刺激によりペットの調教を可能にしてもよい。
【0013】
また前記刺激発生装置が、前記ペットに電気的刺激を与えるために所定の電圧を発生するようにしてもよい。
【0014】
また、前記リードが、リードの張力方向を制御するマニピュレータ機構をさらに備える構成にしてもよい。
【0015】
また、前記ロボット本体部に糞尿処理手段を備えていてもよい。
【0016】
また、前記ロボット本体部に給餌装置を備え、前記ペットの空腹時および調教で必要とされた時に、自動的に餌や水を与える構成であってもよい。
【0017】
また、前記ロボット本体部に前記ペットおよび前記ペット誘導ロボットの状態情報を提示する出力部を有する構成であってもよい。
【0018】
さらに、ネットワークとの通信手段を有し、ネットワークを介したユーザの情報端末からのロボットアクセス要求に対して前記ペットおよび前記ペット誘導ロボットの状態情報を前記ユーザの情報端末に提示する構成であってもよい。
【0019】
またユーザの情報端末からのロボット遠隔制御指示情報に対して制御動作を前記ペット誘導ロボットに実行させるべくネットワークを介して制御動作指令を前記ペット誘導ロボットに送信し、前記ユーザの情報端末が前記ペット誘導ロボットが制御動作を実行した結果として動作結果情報を受信し、前記ユーザに提示する構成であってもよい。
【0020】
また、本願発明にかかるペット誘導方法は、移動可能なロボット本体部とペット装着部および前記ロボット本体部と前記ペット装着部をつなぐリードとからなるペット誘導ロボットによるペット誘導方法であって、前記ペットの周囲の情報を収集する外部情報収集ステップと、前記情報収集ステップで得られた収集情報に応じて前記ロボット本体部の周囲状況を推定する外部環境認識ステップと、前記リードの張力と長さを収集するリード状態収集ステップと、前記外部環境認識ステップと前記リード状態収集ステップで得られた情報からペットの運動状況を推定するペット状況推定ステップと、前記収集情報と前記ペットの状況、および前記ペットの目標経路を格納する前記経路情報記憶手段に格納された経路情報をもとに、前記ロボット本体部の経路を決定する経路計画ステップと、前記経路計画手段が決定した経路に応じて駆動装置を駆動する駆動ステップと、前記周囲状況と前記ペットの状況に応じて前記リードの張力と長さを調整するリード調整ステップとを有することを特徴とする。
【発明の効果】
【0021】
本発明のペット誘導ロボットによれば、人間の代わりに、ペットの状況やその周囲状況、過去の散歩時の履歴情報をもとに散歩の計画をたて、その計画の経路に基づきペットの歩行速度と進行方向を制御することで、人間がペットに付き添うことなくペットの散歩が実現される。
【0022】
また、ユーザの情報端末から遠隔操作が可能であり、ユーザはどこからでもペットの様子を確認することができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0024】
(ペット誘導ロボットの構成)
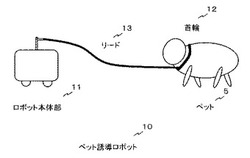
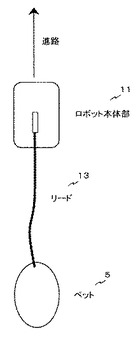
図1は、本発明の実施の形態におけるペット誘導ロボット10の構成を示す概略図である。
【0025】
本発明のペット誘導ロボット10は、車輪等の移動機構を有して移動可能なロボット本体部11とペットに装着する首輪12および前記ロボット本体部11と前記首輪12をつなぐリード13とからなる。ペットの種類によっては、首輪ではなく胴輪でもよい。また、首輪と胴輪を併用してもよい。以下、ペットとして犬を例にとり、ペット装着部として首輪を採用する。
【0026】
ロボット本体部11はペットがその周囲で動き回ってもリード13が絡まったり、車輪への巻き込みや引っ掛かりが発生することがないように、ロボット本体部11はその表面に突起などがあまりない単純な曲面状の車体カバーで覆われていることが望ましい。
【0027】
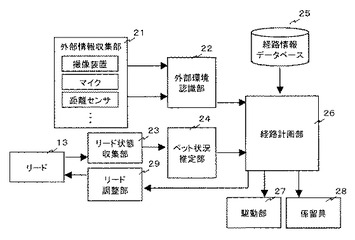
図2は、本発明の実施の形態におけるペット誘導ロボットの構成を示すブロック図である。
【0028】
図2において、ロボット本体部11は、外部情報収集部21、外部環境認識部22、リード状態収集部23、ペット状況推定部24、経路情報データベース25、経路計画部26、駆動部27、係留具28、リード調整部29を備えている。
【0029】
外部情報収集部21は、撮像装置21A、マイク21B、距離センサ21C等を備えている。さらに、現在位置に関する情報を取得する位置情報取得手段としてのGPS(Global Positioning System)信号受信機能を有するGPS受信部および通信機能を有する通信部を有すると良い。
【0030】
撮像装置21Aは、例えば全方位カメラであり、ロボット本体部の周囲を撮像することができる。
【0031】
マイク21Bは、例えば指向性を有するマイクロホンを採用し、ペットの方向に指向性をむけ音声信号を収集する。
【0032】
距離センサ21Cは、非接触式のセンサであって、例えば、赤外線センサや超音波センサ、レーザ式距離センサ等である。
【0033】
また、首輪12もしくはロボット本体部11に、体温センサ、脈拍センサ、血圧センサ、感情センサ等を備えることで、ペットの状況により即した誘導が可能となる。
【0034】
外部環境認識部22には、撮像装置21Aや、マイク21Bおよび距離センサ21C等から、画像信号、音声信号、距離検出信号等が、ロボットの電源が投入されている間、常時入力される。そして、外部環境認識部22は、撮像装置21A、マイク21B、距離センサ21C等から与えられる画像信号、音声信号、距離検出信号等に基づいて、特定の外部状態等を認識し、その認識結果を表す外部環境情報を、経路計画部26に常時出力する。
【0035】
外部環境認識部22は、画像認識部、音声認識部、および距離処理部を有している。
【0036】
画像認識部は、撮像装置21Aで得たカメラ画像データについて画像認識を行い、その画像認識結果を出力する。
【0037】
音声認識部は、マイク21Bで得た音声信号について音声認識を行い、その音声認識結果を出力する。
【0038】
距離検出部は、距離センサの出力値から各物体までの距離を出力する。
【0039】
リード状態収集部23は、張力センサを備え、リード13の張力と長さを収集する。
【0040】
ペット状況推定部24は、運動状況推定部、感情推定部を有し、前記リード状態収集部23から与えられるリード13の張力と長さ、外部情報収集部21から与えられるペットの鳴き声、ペットの画像に基づいて、ペットの運動状況と感情を推定する。
【0041】
運動状況推定部は、リード13の張力と長さ、ペットの鳴き声、ペットの画像を参酌して、ペットの運動状況を「従順」、「反抗的」などのカテゴリに判別する。
【0042】
感情推定部は、リード13の張力が閾値を超えると、機嫌が悪いと推定する。また、ペットの鳴き声やペットの画像等からペットの感情を推定してもよい。
【0043】
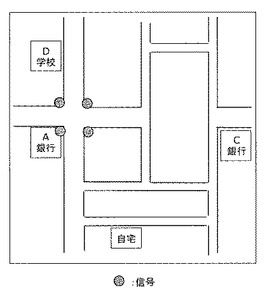
経路情報データベース25の構成について図3を用いて説明する。経路情報データベース25には、図3に示すように、ペットが運動する領域の地図情報が格納されている。図3では画像の形式で示しているが、実際にはリストの形式で持っていても良い。もし、経路情報データベースにない障害物を発見した場合は、前記経路情報データベース25に登録する。また、経路情報データベース25は、危険な、もしくは相性のよくない物体、例えば犬の出没地域を記憶する。また、経路情報データベース25は、交通信号や標識等を記憶しており、交通信号や標識等に制約されない経路を選択することができる。ペット誘導ロボットの経路中に交通信号や標識等を含む場合は、外部情報収集部21により信号や標識を含む画像を得て、外部環境認識部22で当該信号や標識の内容を認識することにより、赤信号では止まる、青信号で進む等の交通ルールに則った誘導が可能となる。信号や標識からロボットに対して信号を送ることで内容を知らせても良い。
【0044】
経路計画部26は、前記経路情報データベース25に格納された経路情報をもとに、前記周囲状況と前記ペットの状況に基づいて経路を更新する。経路計画には、従来技術として知られるポテンシャル法を適用することができる。ポテンシャル法は、現在位置が高くかつ目的位置が低くなるポテンシャル場を設定し、移動体の移動可能領域に比べて障害物占有領域が高くなるように、障害物占有領域だけに、所定の高さを加えたポテンシャル場を生成し、このポテンシャル場において、現在位置から最大傾斜方向を辿ることによって、障害物回避経路を生成する。
【0045】
リード調整部29は、経路計画部26で決定された経路に基づいてペットを誘導するために、リードの長さと張力を調整する。これは、人間がペットの進路を誘導する際に、リードを引くことで調整するのと同じ原理である。
【0046】
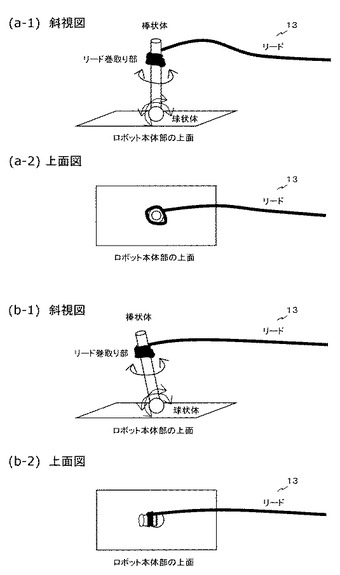
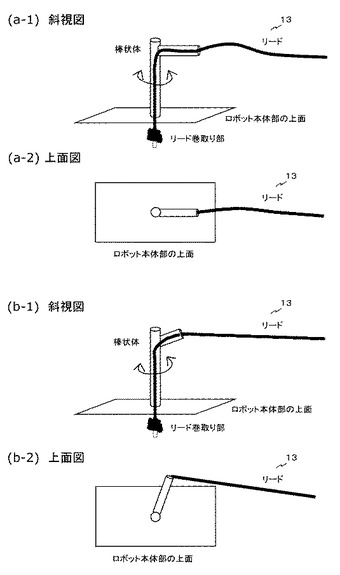
リード調整部29の態様は、図4または図5のように例示できる。図4では、ロボット本体部の上面と、リード巻取り部を有する棒状体が回転自在の球状体で接続されている。該球状体がロボット本体部の上面に対して回転することにより、ペットを所望の方向に引き寄せることができる。図5では、ロボット本体部の上面に、上面に対して垂直な軸の回りに回転可能な棒状体が接続されている。そして、図5に示すように、該棒状体は所定の長さの分岐を有することで、該棒状体を回転させるとリードの張力方向を調整することができる。また、リードの長さは、図4、図5ともに、リード巻取り部によって調整する。
【0047】
なお、リード巻取り部は、図4のようにロボット本体部の上面より上の位置に設置しても良いし、図5のようにロボット本体部の上面より下の位置に設置しても良い。
【0048】
また、本発明のペット誘導ロボットは、図6に示すように、地中に打ち込んでペットを係留する棒状体の係留具28をロボット本体内に備え、必要に応じて、該係留具28を地面に打ち込む。該係留具28を地面に打ち込んでも、リードの長さを変えることで、ペットの運動可能領域を状況に応じて変更できる。
【0049】
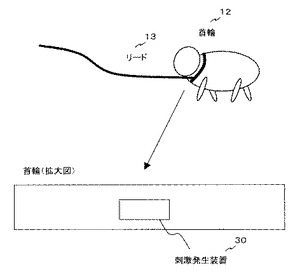
ところで、該ロボットのように、ペットを誘導するためには、ペットを調教する機能が必要である。図7のように首輪に刺激発生装置30を備えることで、必要に応じてペットにこの刺激発生装置30が発生する刺激を与え、ペットの調教を行うことが可能である。リードの張力があらかじめ設定された閾値をこえた場合に、前記刺激発生装置30により、例えば、電気的刺激を短い期間だけ与えることにより、ペットを調教する。また、必要以上に吠える等の迷惑な行動をペットがした場合にも、適宜刺激を与えることで、そのような迷惑な行動を抑制することができる。
【0050】
また、刺激発生装置30は、電気的刺激に限らず、例えばペットの飼い主の音声や臭い、該ペットの好きな臭い等を発生させ、ペットの調教に利用することができる。
【0051】
また、本発明のペット誘導ロボット10は、前記ロボット本体部11に糞尿処理手段を備える。感情推定部でペットが排便をもよおしていることを検出すると、シートを出す。外部環境認識部22が排尿を検知すると、検知した排尿に対して水を噴射し処理を行う。
【0052】
また、本発明のペット誘導ロボット10は、前記ロボット本体部11に給餌装置を備え、前記ペットの空腹時および調教で必要とされた時に、自動的に餌や水を与える。また、あらかじめユーザが設定した時間に餌や水を与えるようにすることも可能である。
【0053】
(ペット誘導ロボットとの通信方法)
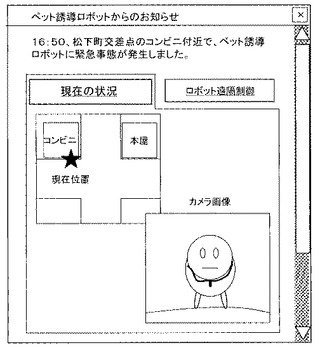
次に、ペット誘導ロボット10とユーザ3との通信の方法について説明する。図8に示すように、ペット誘導ロボット10とユーザの情報端末50はネットワーク51を介して接続することができる。ユーザの情報端末50は、ユーザが所有するコンピュータや携帯情報端末等である。ユーザ3は、情報端末50の画面を通して、ペット誘導ロボット10およびペット5を含む周囲状況を把握することができる。さらに、ペット誘導ロボット10もしくはペット5に異常事態が発生した場合には、ユーザ3の情報端末50に情報を送信し、知らせることができる。図9は、ユーザ3への送信画面例である。ペット誘導ロボット10の現在位置と、カメラ画像が表示される。
【0054】
なお、ロボット本体部11にペットおよび当該ペット誘導ロボット10の状態情報を提示するLEDやディスプレイ、スピーカー等の出力手段を有し、異常事態等が発生した場合に、ロボット本体部の周囲に知らせるようにすると良い。
【0055】
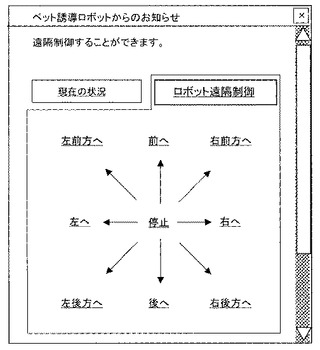
また、ユーザ3の情報端末50からのロボット遠隔制御指示情報に対して制御動作を当該ペット誘導ロボット10に実行させるべく制御動作指令をネットワーク51を介して当該ペット誘導ロボット10に送信し、当該ペット誘導ロボット10が制御動作を実行した結果として動作結果情報とその結果の現状状態を示すロボット状態情報を受信し、前記ユーザ3の情報端末50に提示する。図10は、情報端末50の操作画面例である。ユーザ3はこの画面上でペット誘導ロボット10に対する指示を指定することで当該ペット誘導ロボット10を制御することができる。
【0056】
(経路登録方法)
ここで、経路情報データベース25に経路を登録する方法について説明する。
【0057】
[a.人間の先導による登録]
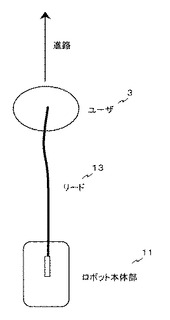
図11に示すように、人間がペット装着部12を装着しペット誘導ロボット10を先導し、GPS信号を受信することで当該ペット誘導ロボット10の位置を取得し、経路情報として経路情報データベース25に登録する。
【0058】
[b.外部情報の受信による登録]
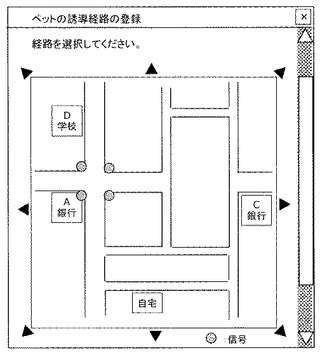
前記経路情報データベース25が、外部から送信された経路情報を受信して、経路情報データベース25に経路情報を入力してもよい。例えば、図12に示すような地図上で、ユーザ3がペンにより経路を入力する。この入力情報が情報端末50からネットワーク51を介してペット誘導ロボット10に送信され、ペット誘導ロボット10がこれを受信すればよい。なお、上述のように、経路をペンでなぞってもよいし、経路のいくつかのポイントを指定すれば、それらを結ぶ経路を自動的に補完してもよい。
【0059】
また、経路の生成には、従来技術として知られるポテンシャル法を適用することができる。ポテンシャル法は、ロボットの目標位置からは引力、障害物からは斥力を受けるポテンシャル関数を設計する。すなわち、ロボットの現在位置が高くかつ目標位置が低くなるポテンシャル場を設定し、ロボットの移動可能領域に比べて障害物占有領域が高くなるように、障害物占有領域だけに、所定の高さを加えたポテンシャル場を生成し、このポテンシャル場において、現在位置から最大傾斜方向を辿ることによって、目標位置までの障害物回避経路を生成する。
【0060】
(経路更新/ペット誘導方法)
次に、図13のフローチャートを用いて、当該ペット誘導ロボット10のペット誘導方法について説明する。
【0061】
ペット誘導ロボット10は、ペット誘導ロボット10に搭載したGPS受信部により位置情報を取得し、前記経路情報データベース25に格納された経路情報に基づいて、進路を走行する。
【0062】
リードの長さは各ペットごとに所定の長さにあらかじめ設定する。この長さは、下記に説明するように周囲状況によっても変化する。
【0063】
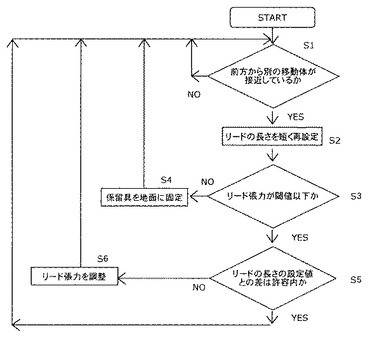
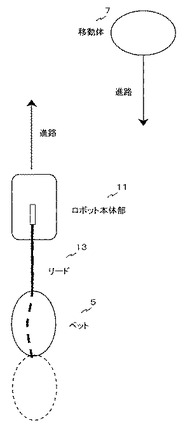
周囲に人間等の移動体が存在するか、前方から人間等の移動体が接近しているかを外部情報収集部21によりセンシングする(ステップS1)。図14、図15は、ペット5の進行方向から別の移動体7が出現していない場合(図14、ステップS1のNO)とペット5の進行方向から別の移動体7が出現している場合(図15、ステップS1のYES)である。図14と図15を比べるとわかるように、別の移動体7が接近している場合は、そうでない場合と比べてリードの長さを短く設定する(ステップS2)ことで、ペット5と別の移動体7が接触することを避ける。
【0064】
また、前記ポテンシャル法を適用する場合は、外部環境認識部22が、前方から例えば別の飼い主のペットが接近中であることを認識すると、接近中のペットの現在位置が高くなるようにポテンシャル場を設定する。接近中のペットの鳴き声等の挙動に応じて、危険だと判断すればポテンシャルを高く、おとなしいと判断すればポテンシャルを低くするといったように、ポテンシャル場を設定するとよい。さらに、経路情報データベース25とデータ照合を行い、接近中のペットに関するデータが見つからなければ、経路情報データベース25に該ペットの出没情報を登録してもよい。
【0065】
次に、リードの張力が閾値以下であるか否かを判定し(ステップS3)、閾値以下でなければ(ステップS3のNO)、図6のように係留具28を地面に打ち込む(ステップS4)。リードの張力が閾値以下であれば(ステップS3のYES)、リードの長さの設定値との差が許容内かを判定し(ステップS5)、許容を超えていれば(ステップS5のNO)リードの長さがリードの長さの設定値との差が許容内になるように、すなわち、リードの長さを所定の長さに保つように、リード調整部29によりリードの張力を調整する(ステップS6)。
【0066】
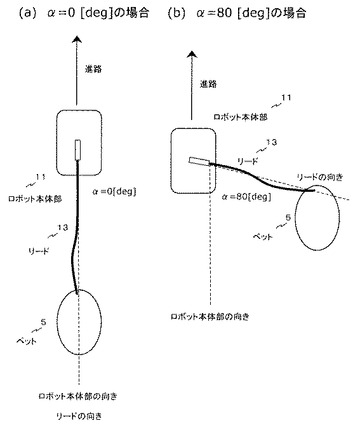
図16に示すように、ロボット本体部11に対して、ペット5があるべき角度に位置するように、リードの向きを調整する。図16は、ロボット本体部の向きとリードの向きのなす角αが0[deg]の場合と、80[deg]の場合を例示している。0[deg]、80[deg]は単なる例であり、この数値に限定されるものではない。人間が犬を散歩する際には、一般的に、家の敷居をまたぐ際には、飼い主が先にまたぎ、散歩中は飼い主がペットの横に位置することが良いとされる。これらの知見を利用することで、ペット5が犬であれば、ペット5が当該ペット誘導ロボットに忠誠心を抱き、円滑な誘導が期待される。
【0067】
かかる構成によれば、経路計画部26がペット3の目標経路を格納する経路情報データベース25と、周囲状況とペット3の状況、経路情報データベース25に格納された経路情報をもとに経路を決定し、経路計画部26の決定した経路に応じてリード調整部29がリードの張力と長さを最適に調整することにより、人間の代わりに、周囲状況やペットの状況、過去の散歩時の履歴情報をもとに散歩の計画をたて、その計画の経路に基づきペットの歩行速度と進行方向を制御することとなり人間がペットに付き添うことなくペットの散歩が実現することができる。
【0068】
なお、本実施の形態において、誘導の対象として適用可能であるものはペットに限るものではなく、人間等にも適用可能である。人間の場合には、ある程度ロボット本体部にあわせて行動することができるため、刺激発生装置を用いた調教は必要なく、ペット誘導ロボットを適用できる。
【産業上の利用可能性】
【0069】
本発明にかかるペット誘導ロボットは、犬などのペットの誘導に実施して有用である。またペットに限らず移動体の誘導の用途に応用できる。
【図面の簡単な説明】
【0070】
【図1】本発明の一実施の形態におけるペット誘導ロボットの概略図
【図2】本発明の一実施の形態におけるペット誘導ロボットのブロック図
【図3】本発明の一実施の形態における経路情報データベースを説明する図
【図4】本発明の一実施の形態におけるリード調整部を説明する図
【図5】本発明の一実施の形態におけるリード調整部を説明する図
【図6】本発明の一実施の形態における係留具を説明する図
【図7】本発明の一実施の形態における刺激発生装置を説明する図
【図8】本発明の一実施の形態におけるペット誘導ロボットと情報端末の通信を説明する図
【図9】本発明の一実施の形態における緊急時の情報端末の画面例を説明する図
【図10】本発明の一実施の形態における緊急時の情報端末の画面例を説明する図
【図11】本発明の一実施の形態におけるユーザとペット誘導ロボットの位置関係を説明する図(上面図)
【図12】本発明の一実施の形態におけるペットの誘導経路の登録画面を示す図
【図13】本発明の一実施の形態におけるペット誘導方法を示すフローチャート
【図14】本発明の一実施の形態におけるペット誘導ロボットとペットの位置関係を説明する図(上面図)
【図15】本発明の一実施の形態におけるペット誘導ロボットとペットの位置関係を説明する図(上面図)
【図16】本発明の一実施の形態におけるペット誘導ロボットとペットの位置関係を説明する図(上面図)
【符号の説明】
【0071】
3 ユーザ(人間)
5 ペット
7 移動体
10 ペット誘導ロボット
11 ロボット本体部
12 首輪(ペット装着部)
13 リード
21 外部情報収集部(外部情報収集手段)
21A 撮像装置
21B マイク
21C 距離センサ
22 外部環境認識部(外部環境認識手段)
23 リード状態収集部(リード状態収集手段)
24 ペット状況推定部(ペット状況推定手段)
25 経路情報データベース(経路情報記憶手段)
26 経路計画部(経路計画手段)
27 駆動部(駆動手段)
28 係留具(係留手段)
29 リード調整部(リード調整手段)
30 刺激発生装置(刺激発生手段)
50 情報端末
51 ネットワーク
【技術分野】
【0001】
本発明はペットの誘導を行うペット誘導ロボットおよびその方法に関するものである。
【背景技術】
【0002】
近年の少子高齢化、核家族化などの進展により、犬などのペットは、防犯や留守番の役割のみならず、生活に潤いや安らぎ、楽しさを与える存在として期待されている。その一方で、ペットを飼うことには、当然いろいろな手間がかかる。これらの手間、世話は、ペットを飼う楽しさそのものでもあるが、飼い主の生活環境、状況によっては、非常に大きな負担としてのしかかってくることになる。特に、犬などのペットの散歩は、高齢者や療養中の人などにとっては、ペット用のリードを手に保持して、ペットの歩行速度や移動方向をコントロールすることは体力的に困難である。また、雨が降っている状況などでは、片手に傘を持ち、もう一方の手でペット用のリードを保持することになる。さらに、単身世帯などは特に、一人でさまざまな家事を行いつつ、社会生活を送る必要があり、時間的に散歩の時間をとることが難しい場合もある。
【0003】
このようなペットの散歩の負担を軽減させるために、従来のペットを誘導する装置として、先行者である飼い主が携行する送信機から送信される誘導信号を受信する左右一対の受信機を備え、その各受信機が受信する誘導信号の強弱とその差によって送信機の位置と方向を検知し、前輪を左右に操舵し且つ後輪の駆動速度を自動制御して、先行者と一定の距離を保って追尾するものがある(例えば、特許文献1参照)。
【特許文献1】特開平10−171533号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、前記従来の構成では、先行者である飼い主が携行する送信機から送信される誘導信号を受信する左右一対の受信機を備え、その各受信機が受信する誘導信号の強弱とその差によって送信機の位置と方向を検知し、前輪を左右に操舵し且つ後輪の駆動速度を自動制御するので、飼い主またはそれに代わる人間は、ペット用のリードを手に保持して、ペットの歩行速度や移動方向をコントロールする必要はないが、ペットの散歩に必ず付き添う必要があるという課題を有していた。
【0005】
本発明は、前記従来の課題を解決するもので、人間の代わりに、ペットの状況やその周囲状況、過去の散歩時の履歴情報をもとに散歩の計画をたて、その計画の経路に基づきペットの歩行速度と進行方向を制御することで、人間が付き添うことなくペットの散歩を実現するペット誘導ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
前記従来の課題を解決するために、本願発明にかかるペット誘導ロボットは、移動可能なロボット本体部とペット装着部および前記ロボット本体部と前記ペット装着部をつなぐリードとからなるペット誘導ロボットであって、前記ロボット本体部は、周囲の情報を収集する外部情報収集手段と、前記収集情報に応じて前記ロボット本体部の周囲状況を推定する外部環境認識手段と、前記リードの張力と長さを収集するリード状態収集手段と、前記外部環境認識手段とリード状態収集手段からペットの運動状況を推定するペット状況推定手段と、ペットの目標経路を格納する経路情報記憶手段と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段とを備え、ペットの状況やその周囲状況、過去の散歩時の履歴情報をもとに散歩の計画をたて、その計画の経路に基づきペットの歩行速度と進行方向の制御を行う。
【0007】
また、前記ペット装着部は、首輪または胴輪であってもよい。
【0008】
また、前記経路計画手段で前記ロボット本体部を停止する指令が決定された場合に地面に対して前記ロボット本体部を固定する係留手段を有する構成であってもよい。
【0009】
また、前記経路情報記憶手段が、ペットもしくは前記ペット誘導ロボットの過去の運動の履歴情報によって格納する情報が更新されるという構成であってもよい。
【0010】
さらに、前記経路情報記憶手段が、外部から送信された経路情報を受信して、前記経路情報を入力する経路情報入力手段を有する構成であってもよい。
【0011】
また、ネットワークとの通信手段をさらに有し、前記経路情報入力手段は、ネットワークを介してユーザの情報端末から送信された前記経路情報を前記受信する構成であってもよい。
【0012】
また、前記ペット装着部に刺激発生装置を備え、この装置が発生する刺激によりペットの調教を可能にしてもよい。
【0013】
また前記刺激発生装置が、前記ペットに電気的刺激を与えるために所定の電圧を発生するようにしてもよい。
【0014】
また、前記リードが、リードの張力方向を制御するマニピュレータ機構をさらに備える構成にしてもよい。
【0015】
また、前記ロボット本体部に糞尿処理手段を備えていてもよい。
【0016】
また、前記ロボット本体部に給餌装置を備え、前記ペットの空腹時および調教で必要とされた時に、自動的に餌や水を与える構成であってもよい。
【0017】
また、前記ロボット本体部に前記ペットおよび前記ペット誘導ロボットの状態情報を提示する出力部を有する構成であってもよい。
【0018】
さらに、ネットワークとの通信手段を有し、ネットワークを介したユーザの情報端末からのロボットアクセス要求に対して前記ペットおよび前記ペット誘導ロボットの状態情報を前記ユーザの情報端末に提示する構成であってもよい。
【0019】
またユーザの情報端末からのロボット遠隔制御指示情報に対して制御動作を前記ペット誘導ロボットに実行させるべくネットワークを介して制御動作指令を前記ペット誘導ロボットに送信し、前記ユーザの情報端末が前記ペット誘導ロボットが制御動作を実行した結果として動作結果情報を受信し、前記ユーザに提示する構成であってもよい。
【0020】
また、本願発明にかかるペット誘導方法は、移動可能なロボット本体部とペット装着部および前記ロボット本体部と前記ペット装着部をつなぐリードとからなるペット誘導ロボットによるペット誘導方法であって、前記ペットの周囲の情報を収集する外部情報収集ステップと、前記情報収集ステップで得られた収集情報に応じて前記ロボット本体部の周囲状況を推定する外部環境認識ステップと、前記リードの張力と長さを収集するリード状態収集ステップと、前記外部環境認識ステップと前記リード状態収集ステップで得られた情報からペットの運動状況を推定するペット状況推定ステップと、前記収集情報と前記ペットの状況、および前記ペットの目標経路を格納する前記経路情報記憶手段に格納された経路情報をもとに、前記ロボット本体部の経路を決定する経路計画ステップと、前記経路計画手段が決定した経路に応じて駆動装置を駆動する駆動ステップと、前記周囲状況と前記ペットの状況に応じて前記リードの張力と長さを調整するリード調整ステップとを有することを特徴とする。
【発明の効果】
【0021】
本発明のペット誘導ロボットによれば、人間の代わりに、ペットの状況やその周囲状況、過去の散歩時の履歴情報をもとに散歩の計画をたて、その計画の経路に基づきペットの歩行速度と進行方向を制御することで、人間がペットに付き添うことなくペットの散歩が実現される。
【0022】
また、ユーザの情報端末から遠隔操作が可能であり、ユーザはどこからでもペットの様子を確認することができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0024】
(ペット誘導ロボットの構成)
図1は、本発明の実施の形態におけるペット誘導ロボット10の構成を示す概略図である。
【0025】
本発明のペット誘導ロボット10は、車輪等の移動機構を有して移動可能なロボット本体部11とペットに装着する首輪12および前記ロボット本体部11と前記首輪12をつなぐリード13とからなる。ペットの種類によっては、首輪ではなく胴輪でもよい。また、首輪と胴輪を併用してもよい。以下、ペットとして犬を例にとり、ペット装着部として首輪を採用する。
【0026】
ロボット本体部11はペットがその周囲で動き回ってもリード13が絡まったり、車輪への巻き込みや引っ掛かりが発生することがないように、ロボット本体部11はその表面に突起などがあまりない単純な曲面状の車体カバーで覆われていることが望ましい。
【0027】
図2は、本発明の実施の形態におけるペット誘導ロボットの構成を示すブロック図である。
【0028】
図2において、ロボット本体部11は、外部情報収集部21、外部環境認識部22、リード状態収集部23、ペット状況推定部24、経路情報データベース25、経路計画部26、駆動部27、係留具28、リード調整部29を備えている。
【0029】
外部情報収集部21は、撮像装置21A、マイク21B、距離センサ21C等を備えている。さらに、現在位置に関する情報を取得する位置情報取得手段としてのGPS(Global Positioning System)信号受信機能を有するGPS受信部および通信機能を有する通信部を有すると良い。
【0030】
撮像装置21Aは、例えば全方位カメラであり、ロボット本体部の周囲を撮像することができる。
【0031】
マイク21Bは、例えば指向性を有するマイクロホンを採用し、ペットの方向に指向性をむけ音声信号を収集する。
【0032】
距離センサ21Cは、非接触式のセンサであって、例えば、赤外線センサや超音波センサ、レーザ式距離センサ等である。
【0033】
また、首輪12もしくはロボット本体部11に、体温センサ、脈拍センサ、血圧センサ、感情センサ等を備えることで、ペットの状況により即した誘導が可能となる。
【0034】
外部環境認識部22には、撮像装置21Aや、マイク21Bおよび距離センサ21C等から、画像信号、音声信号、距離検出信号等が、ロボットの電源が投入されている間、常時入力される。そして、外部環境認識部22は、撮像装置21A、マイク21B、距離センサ21C等から与えられる画像信号、音声信号、距離検出信号等に基づいて、特定の外部状態等を認識し、その認識結果を表す外部環境情報を、経路計画部26に常時出力する。
【0035】
外部環境認識部22は、画像認識部、音声認識部、および距離処理部を有している。
【0036】
画像認識部は、撮像装置21Aで得たカメラ画像データについて画像認識を行い、その画像認識結果を出力する。
【0037】
音声認識部は、マイク21Bで得た音声信号について音声認識を行い、その音声認識結果を出力する。
【0038】
距離検出部は、距離センサの出力値から各物体までの距離を出力する。
【0039】
リード状態収集部23は、張力センサを備え、リード13の張力と長さを収集する。
【0040】
ペット状況推定部24は、運動状況推定部、感情推定部を有し、前記リード状態収集部23から与えられるリード13の張力と長さ、外部情報収集部21から与えられるペットの鳴き声、ペットの画像に基づいて、ペットの運動状況と感情を推定する。
【0041】
運動状況推定部は、リード13の張力と長さ、ペットの鳴き声、ペットの画像を参酌して、ペットの運動状況を「従順」、「反抗的」などのカテゴリに判別する。
【0042】
感情推定部は、リード13の張力が閾値を超えると、機嫌が悪いと推定する。また、ペットの鳴き声やペットの画像等からペットの感情を推定してもよい。
【0043】
経路情報データベース25の構成について図3を用いて説明する。経路情報データベース25には、図3に示すように、ペットが運動する領域の地図情報が格納されている。図3では画像の形式で示しているが、実際にはリストの形式で持っていても良い。もし、経路情報データベースにない障害物を発見した場合は、前記経路情報データベース25に登録する。また、経路情報データベース25は、危険な、もしくは相性のよくない物体、例えば犬の出没地域を記憶する。また、経路情報データベース25は、交通信号や標識等を記憶しており、交通信号や標識等に制約されない経路を選択することができる。ペット誘導ロボットの経路中に交通信号や標識等を含む場合は、外部情報収集部21により信号や標識を含む画像を得て、外部環境認識部22で当該信号や標識の内容を認識することにより、赤信号では止まる、青信号で進む等の交通ルールに則った誘導が可能となる。信号や標識からロボットに対して信号を送ることで内容を知らせても良い。
【0044】
経路計画部26は、前記経路情報データベース25に格納された経路情報をもとに、前記周囲状況と前記ペットの状況に基づいて経路を更新する。経路計画には、従来技術として知られるポテンシャル法を適用することができる。ポテンシャル法は、現在位置が高くかつ目的位置が低くなるポテンシャル場を設定し、移動体の移動可能領域に比べて障害物占有領域が高くなるように、障害物占有領域だけに、所定の高さを加えたポテンシャル場を生成し、このポテンシャル場において、現在位置から最大傾斜方向を辿ることによって、障害物回避経路を生成する。
【0045】
リード調整部29は、経路計画部26で決定された経路に基づいてペットを誘導するために、リードの長さと張力を調整する。これは、人間がペットの進路を誘導する際に、リードを引くことで調整するのと同じ原理である。
【0046】
リード調整部29の態様は、図4または図5のように例示できる。図4では、ロボット本体部の上面と、リード巻取り部を有する棒状体が回転自在の球状体で接続されている。該球状体がロボット本体部の上面に対して回転することにより、ペットを所望の方向に引き寄せることができる。図5では、ロボット本体部の上面に、上面に対して垂直な軸の回りに回転可能な棒状体が接続されている。そして、図5に示すように、該棒状体は所定の長さの分岐を有することで、該棒状体を回転させるとリードの張力方向を調整することができる。また、リードの長さは、図4、図5ともに、リード巻取り部によって調整する。
【0047】
なお、リード巻取り部は、図4のようにロボット本体部の上面より上の位置に設置しても良いし、図5のようにロボット本体部の上面より下の位置に設置しても良い。
【0048】
また、本発明のペット誘導ロボットは、図6に示すように、地中に打ち込んでペットを係留する棒状体の係留具28をロボット本体内に備え、必要に応じて、該係留具28を地面に打ち込む。該係留具28を地面に打ち込んでも、リードの長さを変えることで、ペットの運動可能領域を状況に応じて変更できる。
【0049】
ところで、該ロボットのように、ペットを誘導するためには、ペットを調教する機能が必要である。図7のように首輪に刺激発生装置30を備えることで、必要に応じてペットにこの刺激発生装置30が発生する刺激を与え、ペットの調教を行うことが可能である。リードの張力があらかじめ設定された閾値をこえた場合に、前記刺激発生装置30により、例えば、電気的刺激を短い期間だけ与えることにより、ペットを調教する。また、必要以上に吠える等の迷惑な行動をペットがした場合にも、適宜刺激を与えることで、そのような迷惑な行動を抑制することができる。
【0050】
また、刺激発生装置30は、電気的刺激に限らず、例えばペットの飼い主の音声や臭い、該ペットの好きな臭い等を発生させ、ペットの調教に利用することができる。
【0051】
また、本発明のペット誘導ロボット10は、前記ロボット本体部11に糞尿処理手段を備える。感情推定部でペットが排便をもよおしていることを検出すると、シートを出す。外部環境認識部22が排尿を検知すると、検知した排尿に対して水を噴射し処理を行う。
【0052】
また、本発明のペット誘導ロボット10は、前記ロボット本体部11に給餌装置を備え、前記ペットの空腹時および調教で必要とされた時に、自動的に餌や水を与える。また、あらかじめユーザが設定した時間に餌や水を与えるようにすることも可能である。
【0053】
(ペット誘導ロボットとの通信方法)
次に、ペット誘導ロボット10とユーザ3との通信の方法について説明する。図8に示すように、ペット誘導ロボット10とユーザの情報端末50はネットワーク51を介して接続することができる。ユーザの情報端末50は、ユーザが所有するコンピュータや携帯情報端末等である。ユーザ3は、情報端末50の画面を通して、ペット誘導ロボット10およびペット5を含む周囲状況を把握することができる。さらに、ペット誘導ロボット10もしくはペット5に異常事態が発生した場合には、ユーザ3の情報端末50に情報を送信し、知らせることができる。図9は、ユーザ3への送信画面例である。ペット誘導ロボット10の現在位置と、カメラ画像が表示される。
【0054】
なお、ロボット本体部11にペットおよび当該ペット誘導ロボット10の状態情報を提示するLEDやディスプレイ、スピーカー等の出力手段を有し、異常事態等が発生した場合に、ロボット本体部の周囲に知らせるようにすると良い。
【0055】
また、ユーザ3の情報端末50からのロボット遠隔制御指示情報に対して制御動作を当該ペット誘導ロボット10に実行させるべく制御動作指令をネットワーク51を介して当該ペット誘導ロボット10に送信し、当該ペット誘導ロボット10が制御動作を実行した結果として動作結果情報とその結果の現状状態を示すロボット状態情報を受信し、前記ユーザ3の情報端末50に提示する。図10は、情報端末50の操作画面例である。ユーザ3はこの画面上でペット誘導ロボット10に対する指示を指定することで当該ペット誘導ロボット10を制御することができる。
【0056】
(経路登録方法)
ここで、経路情報データベース25に経路を登録する方法について説明する。
【0057】
[a.人間の先導による登録]
図11に示すように、人間がペット装着部12を装着しペット誘導ロボット10を先導し、GPS信号を受信することで当該ペット誘導ロボット10の位置を取得し、経路情報として経路情報データベース25に登録する。
【0058】
[b.外部情報の受信による登録]
前記経路情報データベース25が、外部から送信された経路情報を受信して、経路情報データベース25に経路情報を入力してもよい。例えば、図12に示すような地図上で、ユーザ3がペンにより経路を入力する。この入力情報が情報端末50からネットワーク51を介してペット誘導ロボット10に送信され、ペット誘導ロボット10がこれを受信すればよい。なお、上述のように、経路をペンでなぞってもよいし、経路のいくつかのポイントを指定すれば、それらを結ぶ経路を自動的に補完してもよい。
【0059】
また、経路の生成には、従来技術として知られるポテンシャル法を適用することができる。ポテンシャル法は、ロボットの目標位置からは引力、障害物からは斥力を受けるポテンシャル関数を設計する。すなわち、ロボットの現在位置が高くかつ目標位置が低くなるポテンシャル場を設定し、ロボットの移動可能領域に比べて障害物占有領域が高くなるように、障害物占有領域だけに、所定の高さを加えたポテンシャル場を生成し、このポテンシャル場において、現在位置から最大傾斜方向を辿ることによって、目標位置までの障害物回避経路を生成する。
【0060】
(経路更新/ペット誘導方法)
次に、図13のフローチャートを用いて、当該ペット誘導ロボット10のペット誘導方法について説明する。
【0061】
ペット誘導ロボット10は、ペット誘導ロボット10に搭載したGPS受信部により位置情報を取得し、前記経路情報データベース25に格納された経路情報に基づいて、進路を走行する。
【0062】
リードの長さは各ペットごとに所定の長さにあらかじめ設定する。この長さは、下記に説明するように周囲状況によっても変化する。
【0063】
周囲に人間等の移動体が存在するか、前方から人間等の移動体が接近しているかを外部情報収集部21によりセンシングする(ステップS1)。図14、図15は、ペット5の進行方向から別の移動体7が出現していない場合(図14、ステップS1のNO)とペット5の進行方向から別の移動体7が出現している場合(図15、ステップS1のYES)である。図14と図15を比べるとわかるように、別の移動体7が接近している場合は、そうでない場合と比べてリードの長さを短く設定する(ステップS2)ことで、ペット5と別の移動体7が接触することを避ける。
【0064】
また、前記ポテンシャル法を適用する場合は、外部環境認識部22が、前方から例えば別の飼い主のペットが接近中であることを認識すると、接近中のペットの現在位置が高くなるようにポテンシャル場を設定する。接近中のペットの鳴き声等の挙動に応じて、危険だと判断すればポテンシャルを高く、おとなしいと判断すればポテンシャルを低くするといったように、ポテンシャル場を設定するとよい。さらに、経路情報データベース25とデータ照合を行い、接近中のペットに関するデータが見つからなければ、経路情報データベース25に該ペットの出没情報を登録してもよい。
【0065】
次に、リードの張力が閾値以下であるか否かを判定し(ステップS3)、閾値以下でなければ(ステップS3のNO)、図6のように係留具28を地面に打ち込む(ステップS4)。リードの張力が閾値以下であれば(ステップS3のYES)、リードの長さの設定値との差が許容内かを判定し(ステップS5)、許容を超えていれば(ステップS5のNO)リードの長さがリードの長さの設定値との差が許容内になるように、すなわち、リードの長さを所定の長さに保つように、リード調整部29によりリードの張力を調整する(ステップS6)。
【0066】
図16に示すように、ロボット本体部11に対して、ペット5があるべき角度に位置するように、リードの向きを調整する。図16は、ロボット本体部の向きとリードの向きのなす角αが0[deg]の場合と、80[deg]の場合を例示している。0[deg]、80[deg]は単なる例であり、この数値に限定されるものではない。人間が犬を散歩する際には、一般的に、家の敷居をまたぐ際には、飼い主が先にまたぎ、散歩中は飼い主がペットの横に位置することが良いとされる。これらの知見を利用することで、ペット5が犬であれば、ペット5が当該ペット誘導ロボットに忠誠心を抱き、円滑な誘導が期待される。
【0067】
かかる構成によれば、経路計画部26がペット3の目標経路を格納する経路情報データベース25と、周囲状況とペット3の状況、経路情報データベース25に格納された経路情報をもとに経路を決定し、経路計画部26の決定した経路に応じてリード調整部29がリードの張力と長さを最適に調整することにより、人間の代わりに、周囲状況やペットの状況、過去の散歩時の履歴情報をもとに散歩の計画をたて、その計画の経路に基づきペットの歩行速度と進行方向を制御することとなり人間がペットに付き添うことなくペットの散歩が実現することができる。
【0068】
なお、本実施の形態において、誘導の対象として適用可能であるものはペットに限るものではなく、人間等にも適用可能である。人間の場合には、ある程度ロボット本体部にあわせて行動することができるため、刺激発生装置を用いた調教は必要なく、ペット誘導ロボットを適用できる。
【産業上の利用可能性】
【0069】
本発明にかかるペット誘導ロボットは、犬などのペットの誘導に実施して有用である。またペットに限らず移動体の誘導の用途に応用できる。
【図面の簡単な説明】
【0070】
【図1】本発明の一実施の形態におけるペット誘導ロボットの概略図
【図2】本発明の一実施の形態におけるペット誘導ロボットのブロック図
【図3】本発明の一実施の形態における経路情報データベースを説明する図
【図4】本発明の一実施の形態におけるリード調整部を説明する図
【図5】本発明の一実施の形態におけるリード調整部を説明する図
【図6】本発明の一実施の形態における係留具を説明する図
【図7】本発明の一実施の形態における刺激発生装置を説明する図
【図8】本発明の一実施の形態におけるペット誘導ロボットと情報端末の通信を説明する図
【図9】本発明の一実施の形態における緊急時の情報端末の画面例を説明する図
【図10】本発明の一実施の形態における緊急時の情報端末の画面例を説明する図
【図11】本発明の一実施の形態におけるユーザとペット誘導ロボットの位置関係を説明する図(上面図)
【図12】本発明の一実施の形態におけるペットの誘導経路の登録画面を示す図
【図13】本発明の一実施の形態におけるペット誘導方法を示すフローチャート
【図14】本発明の一実施の形態におけるペット誘導ロボットとペットの位置関係を説明する図(上面図)
【図15】本発明の一実施の形態におけるペット誘導ロボットとペットの位置関係を説明する図(上面図)
【図16】本発明の一実施の形態におけるペット誘導ロボットとペットの位置関係を説明する図(上面図)
【符号の説明】
【0071】
3 ユーザ(人間)
5 ペット
7 移動体
10 ペット誘導ロボット
11 ロボット本体部
12 首輪(ペット装着部)
13 リード
21 外部情報収集部(外部情報収集手段)
21A 撮像装置
21B マイク
21C 距離センサ
22 外部環境認識部(外部環境認識手段)
23 リード状態収集部(リード状態収集手段)
24 ペット状況推定部(ペット状況推定手段)
25 経路情報データベース(経路情報記憶手段)
26 経路計画部(経路計画手段)
27 駆動部(駆動手段)
28 係留具(係留手段)
29 リード調整部(リード調整手段)
30 刺激発生装置(刺激発生手段)
50 情報端末
51 ネットワーク
【特許請求の範囲】
【請求項1】
移動可能なロボット本体部とペット装着部および前記ロボット本体部と前記ペット装着部をつなぐリードとからなるペット誘導ロボットであって、
前記ロボット本体部は、
周囲の情報を収集する外部情報収集手段と、
前記収集情報に応じて前記ロボット本体部の周囲状況を推定する外部環境認識手段と、
前記リードの張力と長さを収集するリード状態収集手段と、
前記外部環境認識手段と前記リード状態収集手段からペットの運動状況を推定するペット状況推定手段と、
前記ペットの目標経路を格納する経路情報記憶手段と、
前記周囲状況と前記ペットの状況と前記経路情報記憶手段に格納された経路情報をもとに、前記ロボット本体部の経路を決定する経路計画手段と、
前記経路計画手段が決定した経路に応じて駆動装置を駆動する駆動手段と、
前記周囲状況と前記ペットの状況に応じて前記リードの張力と長さを調整するリード調整手段と
を有することを特徴とするペット誘導ロボット。
【請求項2】
前記ペット装着部は、首輪または胴輪であることを特徴とする請求項1に記載のペット誘導ロボット。
【請求項3】
前記ロボット本体部は、前記経路計画手段で前記ロボット本体部を停止する指令が決定された場合に地面に対して前記ロボット本体部を固定する係留手段を有することを特徴とする請求項1又は2に記載のペット誘導ロボット。
【請求項4】
前記経路情報記憶手段は、ペットもしくは前記ロボットの過去の運動の履歴情報によって格納する情報が更新されることを特徴とする請求項1〜3いずれか一項に記載のペット誘導ロボット。
【請求項5】
前記経路情報記憶手段は、外部から送信された経路情報を受信して、前記経路情報を入力する経路情報入力手段を有することを特徴とする請求項1〜4いずれか一項に記載のペット誘導ロボット。
【請求項6】
ネットワークとの通信手段をさらに有し、前記経路情報入力手段は、ネットワークを介してユーザの情報端末から送信された前記経路情報を前記受信することを特徴とする請求項5に記載のペット誘導ロボット。
【請求項7】
前記ペット装着部は、刺激発生手段を備え、この装置が発生する刺激によりペットの調教を可能にしたことを特徴とする請求項1〜6いずれか一項に記載のペット誘導ロボット。
【請求項8】
前記刺激発生手段は、前記ペットに電気的刺激を与えるために所定の電圧を発生することを特徴とする請求項7に記載のペット誘導ロボット。
【請求項9】
前記ロボット本体部は、リードの張力方向を制御する方向制御手段をさらに備えることを特徴とする請求項1〜8いずれか一項に記載のペット誘導ロボット。
【請求項10】
前記ロボット本体部に糞尿処理手段を備えることを特徴とする請求項1〜9いずれか一項に記載のペット誘導ロボット。
【請求項11】
前記ロボット本体部に給餌手段を備え、前記ペットの空腹時および調教で必要とされた時に、自動的に餌や水を与えることを特徴とする請求項1〜10いずれか一項に記載のペット誘導ロボット。
【請求項12】
前記ロボット本体部に前記ペットおよび前記ペット誘導ロボットの状態情報を提示する出力手段を有することを特徴とする請求項1〜11いずれか一項に記載のペット誘導ロボット。
【請求項13】
ネットワークとの通信手段を有し、ネットワークを介したユーザの情報端末からのロボットアクセス要求に対して前記ペットおよび前記ペット誘導ロボットの状態情報を前記ユーザの情報端末に提示することを特徴とする請求項1〜12いずれか一項に記載のペット誘導ロボット。
【請求項14】
ユーザの情報端末からのロボット遠隔制御指示情報に対して制御動作を前記ペット誘導ロボットに実行させるべくネットワークを介して制御動作指令を前記ペット誘導ロボットに送信し、前記ユーザの情報端末が前記ペット誘導ロボットが制御動作を実行した結果として動作結果情報を受信し、前記ユーザに提示することを特徴とする請求項13に記載のペット誘導ロボット。
【請求項15】
移動可能なロボット本体部とペット装着部および前記ロボット本体部と前記ペット装着部をつなぐリードとからなるペット誘導ロボットによるペット誘導方法であって、
前記ペットの周囲の情報を収集する外部情報収集ステップと、
前記情報収集ステップで得られた収集情報に応じて前記ロボット本体部の周囲状況を推定する外部環境認識ステップと、
前記リードの張力と長さを収集するリード状態収集ステップと、
前記外部環境認識ステップと前記リード状態収集ステップで得られた情報からペットの運動状況を推定するペット状況推定ステップと、
前記収集情報と前記ペットの状況、および前記ペットの目標経路を格納する前記経路情報記憶手段に格納された経路情報をもとに、前記ロボット本体部の経路を決定する経路計画ステップと、
前記経路計画手段が決定した経路に応じて駆動装置を駆動する駆動ステップと、
前記周囲状況と前記ペットの状況に応じて前記リードの張力と長さを調整するリード調整ステップと
を有することを特徴とするペット誘導方法。
【請求項1】
移動可能なロボット本体部とペット装着部および前記ロボット本体部と前記ペット装着部をつなぐリードとからなるペット誘導ロボットであって、
前記ロボット本体部は、
周囲の情報を収集する外部情報収集手段と、
前記収集情報に応じて前記ロボット本体部の周囲状況を推定する外部環境認識手段と、
前記リードの張力と長さを収集するリード状態収集手段と、
前記外部環境認識手段と前記リード状態収集手段からペットの運動状況を推定するペット状況推定手段と、
前記ペットの目標経路を格納する経路情報記憶手段と、
前記周囲状況と前記ペットの状況と前記経路情報記憶手段に格納された経路情報をもとに、前記ロボット本体部の経路を決定する経路計画手段と、
前記経路計画手段が決定した経路に応じて駆動装置を駆動する駆動手段と、
前記周囲状況と前記ペットの状況に応じて前記リードの張力と長さを調整するリード調整手段と
を有することを特徴とするペット誘導ロボット。
【請求項2】
前記ペット装着部は、首輪または胴輪であることを特徴とする請求項1に記載のペット誘導ロボット。
【請求項3】
前記ロボット本体部は、前記経路計画手段で前記ロボット本体部を停止する指令が決定された場合に地面に対して前記ロボット本体部を固定する係留手段を有することを特徴とする請求項1又は2に記載のペット誘導ロボット。
【請求項4】
前記経路情報記憶手段は、ペットもしくは前記ロボットの過去の運動の履歴情報によって格納する情報が更新されることを特徴とする請求項1〜3いずれか一項に記載のペット誘導ロボット。
【請求項5】
前記経路情報記憶手段は、外部から送信された経路情報を受信して、前記経路情報を入力する経路情報入力手段を有することを特徴とする請求項1〜4いずれか一項に記載のペット誘導ロボット。
【請求項6】
ネットワークとの通信手段をさらに有し、前記経路情報入力手段は、ネットワークを介してユーザの情報端末から送信された前記経路情報を前記受信することを特徴とする請求項5に記載のペット誘導ロボット。
【請求項7】
前記ペット装着部は、刺激発生手段を備え、この装置が発生する刺激によりペットの調教を可能にしたことを特徴とする請求項1〜6いずれか一項に記載のペット誘導ロボット。
【請求項8】
前記刺激発生手段は、前記ペットに電気的刺激を与えるために所定の電圧を発生することを特徴とする請求項7に記載のペット誘導ロボット。
【請求項9】
前記ロボット本体部は、リードの張力方向を制御する方向制御手段をさらに備えることを特徴とする請求項1〜8いずれか一項に記載のペット誘導ロボット。
【請求項10】
前記ロボット本体部に糞尿処理手段を備えることを特徴とする請求項1〜9いずれか一項に記載のペット誘導ロボット。
【請求項11】
前記ロボット本体部に給餌手段を備え、前記ペットの空腹時および調教で必要とされた時に、自動的に餌や水を与えることを特徴とする請求項1〜10いずれか一項に記載のペット誘導ロボット。
【請求項12】
前記ロボット本体部に前記ペットおよび前記ペット誘導ロボットの状態情報を提示する出力手段を有することを特徴とする請求項1〜11いずれか一項に記載のペット誘導ロボット。
【請求項13】
ネットワークとの通信手段を有し、ネットワークを介したユーザの情報端末からのロボットアクセス要求に対して前記ペットおよび前記ペット誘導ロボットの状態情報を前記ユーザの情報端末に提示することを特徴とする請求項1〜12いずれか一項に記載のペット誘導ロボット。
【請求項14】
ユーザの情報端末からのロボット遠隔制御指示情報に対して制御動作を前記ペット誘導ロボットに実行させるべくネットワークを介して制御動作指令を前記ペット誘導ロボットに送信し、前記ユーザの情報端末が前記ペット誘導ロボットが制御動作を実行した結果として動作結果情報を受信し、前記ユーザに提示することを特徴とする請求項13に記載のペット誘導ロボット。
【請求項15】
移動可能なロボット本体部とペット装着部および前記ロボット本体部と前記ペット装着部をつなぐリードとからなるペット誘導ロボットによるペット誘導方法であって、
前記ペットの周囲の情報を収集する外部情報収集ステップと、
前記情報収集ステップで得られた収集情報に応じて前記ロボット本体部の周囲状況を推定する外部環境認識ステップと、
前記リードの張力と長さを収集するリード状態収集ステップと、
前記外部環境認識ステップと前記リード状態収集ステップで得られた情報からペットの運動状況を推定するペット状況推定ステップと、
前記収集情報と前記ペットの状況、および前記ペットの目標経路を格納する前記経路情報記憶手段に格納された経路情報をもとに、前記ロボット本体部の経路を決定する経路計画ステップと、
前記経路計画手段が決定した経路に応じて駆動装置を駆動する駆動ステップと、
前記周囲状況と前記ペットの状況に応じて前記リードの張力と長さを調整するリード調整ステップと
を有することを特徴とするペット誘導方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2008−282073(P2008−282073A)
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願番号】特願2007−123184(P2007−123184)
【出願日】平成19年5月8日(2007.5.8)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願日】平成19年5月8日(2007.5.8)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]