
ホイスト制御装置及び揚重設備
【課題】防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、複雑な検出手段を用いることなく、複数のホイストのロープに加わる荷重の検出及びその合算を簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御可能なホイスト制御装置を提供する。
【解決手段】本発明は、二台のホイストの各減速機の出力軸に固定されその回転反力によってロープ繰出し方向へのみ回転動作する第1及び第2のトルクアームと、各トルクアームの回転力を伝達する第1及び第2の油圧機構と、ガイド棒24、25、34、35に沿って移動自在で第1及び第2の入力側シリンダ23A、23Bからの伝達力と所定のばね力に抗して移動する第1及び第2の駆動部材26、36と、各駆動部材26、36の動作でオン/オフが切換可能な第1〜第3のリミットスイッチ31〜33とを備え、各リミットスイッチ31〜33にて得られた結果に基づいて原動機の動作を制御する。
【解決手段】本発明は、二台のホイストの各減速機の出力軸に固定されその回転反力によってロープ繰出し方向へのみ回転動作する第1及び第2のトルクアームと、各トルクアームの回転力を伝達する第1及び第2の油圧機構と、ガイド棒24、25、34、35に沿って移動自在で第1及び第2の入力側シリンダ23A、23Bからの伝達力と所定のばね力に抗して移動する第1及び第2の駆動部材26、36と、各駆動部材26、36の動作でオン/オフが切換可能な第1〜第3のリミットスイッチ31〜33とを備え、各リミットスイッチ31〜33にて得られた結果に基づいて原動機の動作を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷役物を複数のホイストで吊り上げる揚重設備において、複数のホイストの動作を制御する技術に関する。
【背景技術】
【0002】
一般に、防爆を要求される危険度の高い揚重設備にあっては、ホイストによって荷役物を吊り上げる場合に、複数台、通常は二台のホイストを使用する。これは、二台のホイストのうち一台が故障したり、吊り下げ用のロープのうち一本が破断した場合等のトラブルが発生した場合であっても、残りのホイスト、ロープで吊り上げることができるのがその理由である。
また、荷役物を吊り上げる際に設定値を超える負荷がホイストに加わった場合、吊り上げを中止したり警報を発するなどの安全対策を講じる必要があり、そのためにロープに加わる荷重を検出する装置を備えることも広く知られている。
【0003】
例えば低揚程であってシーブを動滑車として使用するホイストにおいて、ホイストの適所に固定したロープの固定端に加わる荷重とこのロープの荷役物を吊った先端側に加わる荷重とがほぼ等しいものと考え、固定端に荷重検出装置を設置したものも提案されている。
【0004】
しかし、動滑車を使用しない高揚程向けのホイストにあっては、ロープはホイストの適所に固定されないので、ロープに加わる荷重を直接検出することができない。また、ホイストが設置されている環境が例えば可燃性のガスや粉塵を含んでいて防爆を要する場所である場合には、引火の心配があるため電気式の荷重検出装置を使用することが難しいという問題がある。
【0005】
さらに、複数台のホイストで一個の荷役物を吊り上げる揚重設備においては、個々のロープに加わる荷重を検出してその合計を求めることによりホイストに加わる負荷が設定値以下か以上かを判断させる必要があるが、個々のロープについて荷重検出装置を設け、更にそれらの検出値を合計する手段を設けるため全体が複雑化することを避けられない。加えて、前述のように完全な防爆を要する環境下では検定を受けた少数の電気式のしか使用できない、という制限がある。
【0006】
このような課題に鑑み、複数台のホイストのロープの個々に加わる荷重の検出とその合算とを非電気的に行なう荷重検出装置も提案されている(特許文献1参照)。
しかし、従来技術では、複数台(2台)のホイストを同時に運転させる際、各駆動モータの特性の相違に起因してロープ速度にずれが生じて片側のロープがたるんだ場合であっても、このたるみを調整することができないという問題がある。
【0007】
特に、2台のホイストを用いて例えばLNGタンク内部のポンプを引き上げる場合には、内部の状態を目視で確認することができないため、最初からロープ先端部においてずれが発生していることが多く、これを調整することは困難であった。
このようなロープのずれは、例えばロードセルのような検出手段を用いることにより調整することができるが、その場合には、装置構成が複雑になるとともに、コストアップを招くという問題がある。
【特許文献1】特開2002−53294号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、このような従来の技術の課題を解決するためになされたもので、その目的とするところは、防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、また複雑な検出手段を用いることなく、複数のホイストのロープに加わる荷重の検出及びその合算を簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御可能なホイスト制御装置を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた請求項1記載の発明は、原動機によって駆動され減速機によって減速駆動される巻取ドラムを有する複数のホイストを備え、前記巻取ドラムにそれぞれ巻回されたロープで荷役物を吊り上げる揚重設備に適用可能なホイスト制御装置であって、前記複数のホイストにそれぞれ設けられ、前記減速機の出力軸に固定され当該減速機の回転反力によってロープ繰出し方向へのみ回転動作するように構成された複数の動力伝達部材と、前記複数の動力伝達部材の回転力を油圧シリンダを介して伝達する複数の油圧機構と、所定のガイド機構に沿って移動自在に構成され、前記油圧機構からの伝達力がそれぞれ与えられるとともに、所定のばね力に抗して移動する駆動部材を有する複数の駆動機構と、前記複数の駆動機構の動作によってオン/オフが切り換えられるように構成された複数の機械式センサとを備え、前記複数の機械式センサにて得られた結果に基づいて前記原動機の動作を同期制御するように構成されたホイスト制御装置である。
請求項2記載の発明は、請求項1記載の発明において、前記複数のホイストが、第1及び第2のホイストを有するとともに、前記複数の駆動機構が、前記第1及び第2のホイストに対応して構成された第1及び第2の駆動部材を有し、さらに、前記複数の機械式センサが、前記第1及び第2の駆動部材の動作によってオン/オフが切り換えられるように構成された第1〜第3の機械式センサを有し、前記第1〜第3の機械式センサのうちのいずれかが、前記第1及び第2の駆動部材のうちのいずれかに固定されるとともに、当該駆動部材に固定された前記機械式センサが、当該他の駆動部材の動作によってオン/オフが切り換えられるように構成されているものである。
請求項3記載の発明は、原動機によって駆動され減速機によって減速駆動される巻取ドラムを有する複数のホイストを備え、前記巻取ドラムにそれぞれ巻回されたロープで荷役物を吊り上げる揚重設備であって、請求項1又は2のいずれか1項記載のホイスト制御装置を備えた揚重設備である。
【0010】
本発明のホイスト制御装置の場合、複数のホイストの減速機に設けられた複数の動力伝達部材の回転力をそれぞれ油圧機構によって複数の駆動機構に伝達し、当該駆動機構をガイド機構に沿って所定のばね力に抗して移動させ、当該駆動機構の動作によって複数の機械式センサのオン/オフをそれぞれ切り換える。そして、これら複数の機械式センサにて得られた結果に基づいて揚重設備の原動機の動作を同期制御するようにしたことから、防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、また複雑な検出手段を用いることなく、複数のホイストのロープにそれぞれ加わる荷重の検出及びその合算とを合理的且つ簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御することができる。
【0011】
特に本発明では、複数の駆動機構をガイド機構に沿って所定のばね力に抗して移動させ、これにより複数の機械式センサのオン/オフをそれぞれ切り換えることから、ガイド機構の大きさ・形状、当該ばね力の値(ばね定数)を適宜調整することによって、複数のホイストのロープにそれぞれ加わる荷重の検出及びその合算の条件を任意に設定することができる。
【0012】
本発明において、複数のホイストが、第1及び第2のホイストを有するとともに、複数の駆動機構が、第1及び第2のホイストに対応して構成された第1及び第2の駆動部材を有し、さらに、複数の機械式センサが、第1及び第2の駆動部材の動作によってオン/オフが切り換えられるように構成された第1〜第3の機械式センサを有し、第1〜第3の機械式センサのうちのいずれかが、第1及び第2の駆動部材のうちのいずれかに固定されるとともに、当該駆動部材に固定された機械式センサが、当該他の駆動部材の動作によってオン/オフが切り換えられるように構成されている場合には、現在広く用いられている揚重設備に適用可能なホイスト制御装置として、より小型で設計の自由度の大きいホイスト制御装置を簡素な構成で提供することができる。
【0013】
そして、以上のようなホイスト制御装置を備えることにより、複数のホイストのロープにそれぞれ加わる荷重の検出及びその合算とを合理的且つ簡単な構成で行い、所望の状態に自動制御可能な揚重設備を安価に提供することができる。
【発明の効果】
【0014】
本発明によれば、防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、また複雑な検出手段を用いることなく、複数のホイストのロープに加わる荷重の検出及びその合算を簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御可能なホイスト制御装置を提供することができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の好ましい実施の形態を図面を参照して詳細に説明する。
図1は、本発明に係る揚重設備の実施の形態の全体を示す概略構成図、図2は、同揚重設備に適用されるホイストの内部構成を示す断面図である。
また、図3(a)(b)は、荷役物の吊り下げ状態を示す説明図、図4は、本発明に係るホイスト制御装置の実施の形態を示す概略構成図である。
【0016】
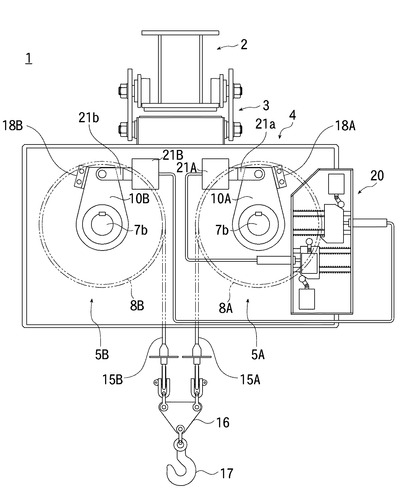
図1に示すように、本実施の形態のホイスト制御装置20は、公知の揚重設備1に適用されるものである。
この揚重設備1は、形鋼から構成されるレール2に沿って走行する台車部3を有し、この台車部3にフレーム4が固定され吊り下げられている。このフレーム4には複数のホイスト5(本実施の形態の場合は二台のホイスト5A、5B)がレール2を挟む位置において互いに平行に保持されている。
【0017】
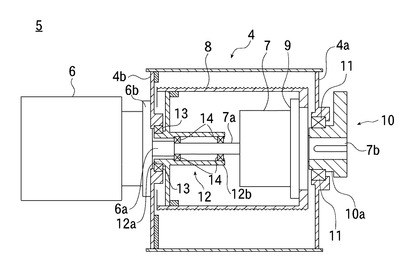
各ホイスト5A、5Bは、図2に示すように、同一中心軸線上に配置して出力軸6a、入力軸7aを互いに結合した、防爆型ブレーキモータからなる電気式の原動機6と、減速機7と、減速機7を囲むように減速機7と同心に配置したドラム(巻取ドラム)8とを有している。
この減速機7は遊星歯車式のもので、取付部材9を介してドラム8内に固定されるとともに、その出力軸7bとトルクアーム10(10A、10B:動力伝達部材)がキイ結合により固着され、さらにこのトルクアーム10の本体部10aが、フレーム4の正面側壁4aに軸受11によって回転可能に支持されている。
【0018】
また、上述した原動機6は、取付部材6bを介してフレーム4の後面側壁4bに取り付けられている。そして、ドラム8の内部には、フレーム4の後面側壁4b近傍において、ボス12a、12bを有する円板支持部材12が固定され、一方のボス12a外面がフレーム4の後面側壁4bに軸受13を介して回転可能に支持されるとともに、他方のボス12b内面が軸受14を介して減速機7の入力軸7aに回転可能に支持されている。
【0019】
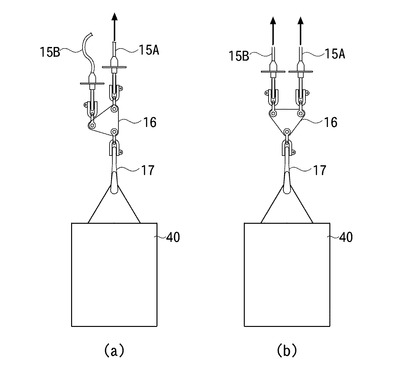
第1及び第2のホイスト5A、5Bは、それぞれワイヤーロープ15A、15Bが巻回されており、それぞれ対向する側面側から各ワイヤーロープ15A、15Bを互いに接近して平行に下方へ垂下させ、各ドラム8A、8Bを互いに反対方向へ回転させることにより各ワイヤーロープ15A、15Bを同時に巻き取り又は繰り出すように構成されている。
そして、各ワイヤーロープ15A、15Bの先端部は三角プレート16の両端部に連結され、この三角プレート16の下端部に取り付けたフック17に荷役物40を引っ掛けるようになっている(図3(a)(b)参照)。
【0020】
上述したように、トルクアーム10はフレーム4の正面側壁4aに回転可能に支持されている。このため、本実施の形態では、各ドラム8A、8Bのロープ巻取方向へ回転した場合にトルクアーム10A、10Bと当接することでトルクアーム10A、10Bの回転を阻止するためのストッパ18A、18Bが、フレーム4の例えば正面側壁4aに設けられている。
【0021】
一方、本実施の形態においては、トルクアーム10A、10Bのロープ繰出方向への力を検出して出力するための、油圧シリンダからなる第1及び第2の出力側シリンダ21A、21Bが設けられている。
ここで、第1及び第2の出力側シリンダ21A、21Bは、それぞれのピストンロッド21a、21bがトルクアーム10A、10Bの先端部に回動自在に連結されている。そして、荷役物40の吊り上げ時にトルクアーム10A、10Bに発生するロープ繰出方向の回転力が各シリンダ21A、21Bのピストンロッド21a、21bに伝達されるように構成されている。
【0022】
さらに、第1のホイスト5Aの第1の出力側シリンダ21Aと、第2のホイスト5Bの第2の出力側シリンダ21Bは、以下に説明するホイスト制御装置20に接続されている。そして、荷役物40の吊り上げ時に各シリンダ21A、21Bのトルクアーム10A、10Bに発生するロープ繰出方向の回転力が、ホイスト制御装置20に伝達されるようになっている。
【0023】
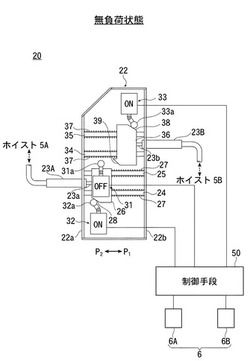
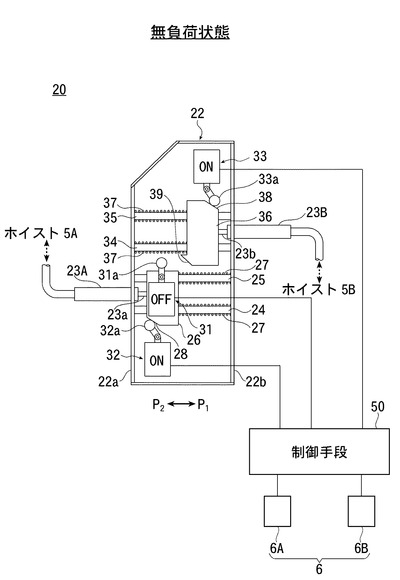
図4に示すように、本実施の形態のホイスト制御装置20は、装置本体としてほぼ矩形状のフレーム22を有している。
このフレーム22には、直線状に延びる一対の取付部22a、22bが平行に対向配置されており、各取付部22a、22bに、それぞれ油圧シリンダからなる第1及び第2の入力側シリンダ23A、23Bが取り付けられている。
【0024】
これら第1及び第2の入力側シリンダ23A、23Bは、上述した第1及び第2の出力側シリンダ21A、21Bにそれぞれ接続されて油圧機構が構成され、第1及び第2の出力側シリンダ21A、21Bにて生じた圧力がそれぞれ伝達入力されるようになっている。
【0025】
ここで、第1の入力側シリンダ23Aは、そのピストンロッド23aがフレーム22の内側に位置するように一方の取付部22aに取り付けられている。
また、第2の入力側シリンダ23Bは、そのピストンロッド23bがフレーム22の内側に位置するように他方の取付部22bに取り付けられている。
【0026】
この場合、第1及び第2の入力側シリンダ23A、23Bは、フレーム22の取付部22a、22bの延びる方向に関して所定の距離だけ離間するように配置構成されている。
また、第1及び第2の入力側シリンダ23A、23Bは、それぞれのピストンロッド23a、23bが、取付部22a、22bの延びる方向に対して直交する方向(例えば、図中矢印P1又P2は方向)に動作するように取付方向が定められている。
【0027】
フレーム22の内側であって、第1の入力側シリンダ23Aの両側には、取付部22a、22bの延びる方向に対して直交する方向に延びる第1及び第2のガイド棒(ガイド機構)24、25が所定の間隔をおいて設けられている。
これら第1及び第2のガイド棒24、25は、それぞれ直線状に形成されている。そして、第1及び第2のガイド棒24、25には、平板状の第1の駆動部材26が、第1及び第2のガイド棒24、25に沿って摺動可能な状態で装着されている。
【0028】
ここで、第1の駆動部材26は、第1の入力側シリンダ23Aのピストンロッド23aに固定され、第1の入力側シリンダ23Aの駆動力によって第1及び第2のガイド棒24、25に沿って移動するように駆動機構が構成されている。
また、第1の駆動部材26の、第1の入力側シリンダ23Aのピストンロッド23a固定側と反対側の領域には、各ガイド棒24、25の周囲に例えば同一の圧縮コイルばね27が装着されている。
【0029】
そして、第1の入力側シリンダ23Aを動作させて第1の駆動部材26を矢印P1方向に移動させることにより、圧縮コイルばね27が圧縮され、その反力が第1の駆動部材26に対して与えられるように構成されている。
第1の駆動部材26は、第1及び第2のガイド棒24、25より幅広に形成されており、第1のガイド棒24側に若干はみ出す部分を有している。そして、第1の駆動部材26のはみ出した部分の第1の入力側シリンダ23A側の部位には、第1の駆動部材26の移動方向、すなわち、第1及び第2のガイド棒24、25の延びる方向に対して例えば鋭角に傾斜させたテーパ状の係止駆動部28が形成されている。
さらに、第1の駆動部材26上には、第1のリミットスイッチ31が配設されている。
【0030】
図4に示すように、本実施の形態では、第1のリミットスイッチ31の動作ピン31aが、第2のガイド棒25に対して側方に位置するように配置され、矢印P2方向に傾斜することによってオンとなるように構成されている。
なお、この第1のリミットスイッチ31及び後述する第2及び第3のリミットスイッチ32、33は、それぞれ動作ピン31a、32a、33aが傾いている状態がオンとなるものである。
【0031】
一方、フレーム22の内側には、上述した第1及び第2のガイド棒24、25のうち第1のガイド棒24側の領域に、第2のリミットスイッチ32が配設されている。
本実施の形態では、第2のリミットスイッチ32の動作ピン32aが、第1の駆動部材26の移動によってその係止駆動部28と当接し又はその当接が解除されることにより、第2のリミットスイッチ32のオン/オフが行われるように構成されている。
【0032】
他方、フレーム22の内側であって、第2の入力側シリンダ23Bの両側には、取付部22a、22bの延びる方向に対して直交する方向(P1又はP2方向)に延びる第3及び第4のガイド棒34、35が所定の間隔をおいて設けられている。
これら第3及び第4のガイド棒34、35は、それぞれ直線状に形成されている。そして、第3及び第4のガイド棒34、35には、平板状の第2の駆動部材36が、第3及び第4のガイド棒34、35に沿って摺動可能な状態で装着されている。
【0033】
本実施の形態の場合、これら第3及び第4のガイド棒34、35と、上述した第1及び第2のガイド棒24、25とは、ほぼ同一の平面内に位置するように配置構成されている。
【0034】
第2の駆動部材36は、第2の入力側シリンダ23Bのピストンロッド23bに固定され、第2の入力側シリンダ23Bの駆動力によって第3及び第4のガイド棒34、35に沿ってP1又はP2方向に移動するように駆動機構が構成されている。
【0035】
また、第3及び第4のガイド棒34、35の周囲には、第2の駆動部材36の、第2の入力側シリンダ23Bのピストンロッド23b固定側と反対側の領域に、例えば同一の圧縮コイルばね37が装着されている。
そして、第2の入力側シリンダ23Bを動作させて第2の駆動部材36を矢印P2方向に移動させることにより、圧縮コイルばね37が圧縮され、その反力が第2の駆動部材36に対して与えられるように構成されている。
【0036】
ここで、第2の駆動部材36は、第3及び第4のガイド棒34、35より幅広に形成され、第3及び第4のガイド棒34、35の両側に若干はみ出す部分を有している。
そして、第2の駆動部材36のはみ出した部分のうち、第4のガイド棒35側の第2の入力側シリンダ23B側の部位には、第2の駆動部材36の移動方向、すなわち、第3及び第4のガイド棒34、35の延びる方向に対して例えば鋭角に傾斜させたテーパ状の第1の係止駆動部38が形成されている。
【0037】
一方、フレーム22の内側の、上記第3及び第4のガイド棒34、35のうち第4のガイド棒35の側方の領域には、第3のリミットスイッチ33が配設されている。
そして、第3のリミットスイッチ33の動作ピン33aが、第2の駆動部材36の第1の係止駆動部38と当接し又はその当接が解除されることにより、第3のリミットスイッチ33のオン/オフが行われるように構成されている。
【0038】
また、第2の駆動部材36のはみ出した部分のうち第3のガイド棒34側の第2の入力側シリンダ23Bと反対側の部位には、第2の駆動部材36の移動方向、すなわち、第3及び第4のガイド棒34、35の延びる方向に対して例えば鋭角に傾斜させたテーパ状の第2の係止駆動部39が形成されている。
そして、上述した第1のリミットスイッチ31の動作ピン31aが、第2の駆動部材36の第2の係止駆動部39と当接し又はその当接が解除されることにより、第1のリミットスイッチ31のオン/オフが行われるように構成されている。
【0039】
さらに、これら第1〜第3のリミットスイッチ31〜33は、例えば揚重設備1のフレーム4に設けた制御手段50に接続され、第1〜第3のリミットスイッチ31〜33にて得られた結果に基づき、上述した第1及び第2のホイスト5A、5Bの原動機6A、6Bの動作を制御するように回路が構成されている。
【0040】
以下、本実施の形態の動作について、巻上時の動作を例にとって説明する。
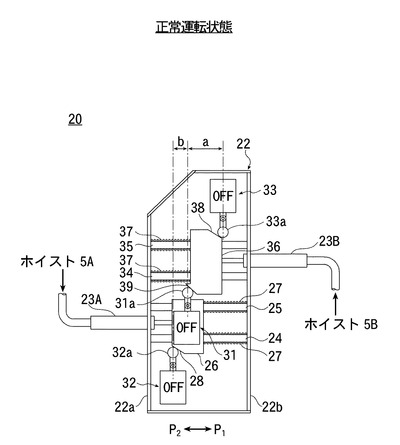
ここで、図4は、第1及び第2のホイスト5A、5Bのワイヤーロープ15A、15Bに荷重が作用していない状態を示すもの、図5は、第1及び第2のホイスト5A、5Bが正常に動作している状態を示すものである。
【0041】
図4に示すように、本実施の形態では、無負荷運転時において、圧縮コイルばね27の付勢力によって第1の駆動部材26が第1の入力側シリンダ23A側に配置されるようになっており、その結果、係止駆動部28が第2のリミットスイッチ32の動作ピン32aと当接して、第2のリミットスイッチ32がオン状態になる。
【0042】
また同様に、圧縮コイルばね37の付勢力によって第2の駆動部材36が第2の入力側シリンダ23B側に配置され、その結果、第1の係止駆動部38が第3のリミットスイッチ33の動作ピン33aと当接して、第3のリミットスイッチ33がオン状態になる。
さらに、この状態では、第1のリミットスイッチ31の動作ピン31aと第2の駆動部材36の第2の係止駆動部39は当接していないため、第1のリミットスイッチ31は、オフ状態となっている。
【0043】
図4に示す状態において、ドラム8に巻回されたワイヤーロープ15A、15Bに荷重が作用すると、トルクアーム10A、10Bがロープ繰出方向に回転し、その結果、第1及び第2の出力側シリンダ21A、21Bのピストンロッド21a、21bをそれぞれ押圧し、その圧力が、ホイスト制御装置20の第1及び第2の入力側シリンダ23A、23Bへ伝達される。
そして、ホイスト制御装置20の第1及び第2の入力側シリンダ23A、23Bに圧力が発生すると、第1の駆動部材26が押圧されて矢印P1方向へ移動するとともに、第2の駆動部材36が押圧されて矢印P2方向へ移動する。
【0044】
その結果、図5に示すように、第1及び第2のガイド棒24、25に装着した圧縮コイルばね27と、第3及び第4のガイド棒34、35に装着した圧縮コイルばね37が、それぞれ圧縮されてその弾性力(反力)が次第に大きくなり、第1及び第2の入力側シリンダ23A、23Bからの押圧力とつり合った位置で第1及び第2の駆動部材23A、23Bが停止する。
【0045】
本実施の形態では、このような無負荷運転時において、第1〜第3のリミットスイッチ31〜33がオフ状態になるように、圧縮コイルばね27、37のばね定数、第1及び第2の駆動部材23A、23Bのサイズ及び配置、第1〜第3のリミットスイッチ31〜33のサイズ及び配置等の種々の条件を設定する。
【0046】
ここでは、第1のリミットスイッチ31の動作ピン31aと、第3のリミットスイッチ33の動作ピン33aの軸間の距離をaとする。また、第2のリミットスイッチ32の動作ピン32aと、第3のリミットスイッチ33の動作ピン33aの軸間の距離をbとする。
そして、これらの距離a、bの和に相当するばね圧縮量が吊り荷重に相当している。図3(a)から図3(b)、図3(b)から図3(a)への変化に対し、吊り荷重が一定の場合において、a+b=一定となるように設定されている。
【0047】
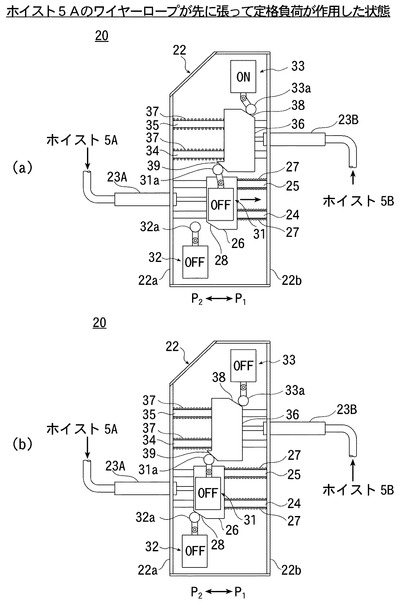
図6(a)(b)は、第1及び第2のホイスト5A、5Bのうち一方のホイスト(例えば、第1のホイスト5A)のワイヤーロープ15Aが先に張って定格負荷が作用した場合の状態を示すものである(図3(a)参照)。
この場合においては、第1の入力側シリンダ23Aの圧力が高くなるため、第1の駆動部材26が矢印P1方向へ移動して圧縮コイルばね27が圧縮され、その結果、第2のリミットスイッチ32が解除(OFF)される。
【0048】
その一方、第2の入力側シリンダ23Bの圧力が相対的に低くなるため、予め設定した圧縮コイルばね37の付勢力によって、第2の駆動部材36が矢印P1方向へ移動し、その結果、第3のリミットスイッチ33がオンになる。
ここで、制御手段50からの命令によって第1のホイスト5Aの原動機6Aを停止させ、第2のホイスト5Bの原動機6Bのみを巻上運転させる。その後、図示しないタイマーを用いて第2のホイスト5Bを所定量(例えば90mm程度)移動(巻上げ)し、第3のリミットスイッチ33のオン状態が解除されるように、この巻上動作を所定回数続ける(例えば、3回)。
【0049】
これは所謂インチングをさせることではなく、第2のホイスト5Bを駆動させる毎に条件を新たに測定して上述した巻上動作を繰り返すもので、ワイヤーロープ15Bが張るように連続して動作を行う。
そして、第3のリミットスイッチ33が解除(OFF)された後は、図6(b)に示すように、正常運転状態として、制御手段50からの命令によって、第1及び第2のホイスト5A、5B共に巻上運転を行うように制御する。
【0050】
一方、上述した巻上動作を繰り返した場合であっても、第3のリミットスイッチ33が解除(OFF)されない場合には、第1及び第2のホイスト5A、5Bの動作を停止し、装置の点検を行う。
【0051】
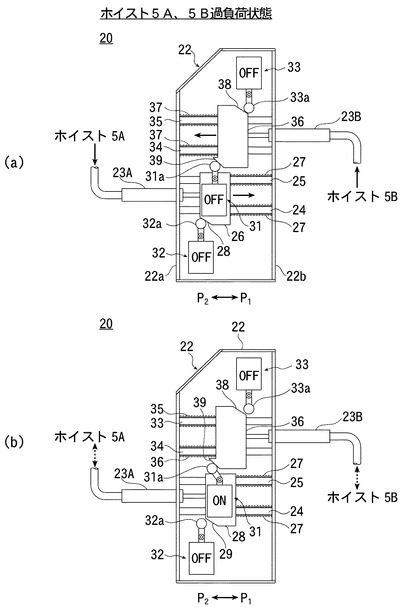
図7(a)(b)は、第1及び第2のホイスト5A、5Bに過負荷が作用した場合の状態を示すものである。
上述したように、正常な状態では、ワイヤーロープ15A、15Bが均等にドラム8に巻回され、三角プレート16を水平を保持した状態で巻き上げられる。
【0052】
この状態において、荷役物40が何かに引っ掛かるなどして過負荷状態となった場合には、図7(a)に示す正常状態から、ホイスト制御装置20の第1及び第2の入力側シリンダ23A、23Bにおける圧力が大きくなり、第1の駆動部材26が押圧されて矢印P1方向へ移動するとともに、第2の駆動部材36が押圧されてP2方向へ移動する。
その結果、図7(b)に示すように、第1のリミットスイッチ31の動作ピン31aが第2の駆動部材36の第1の係止駆動部38と当接して第1のリミットスイッチ31がオン状態になる。
【0053】
一方、第2のリミットスイッチ32の動作ピン32aと第1の駆動部材26の係止駆動部28とは離間する。また、第3のリミットスイッチ33の動作ピン33aと第2の駆動部材36の第1の係止駆動部38とについても離間する。
【0054】
これにより、第1のリミットスイッチ31のみがオン状態になる。
この状態となった場合には、制御手段50からの命令によって、第1及び第2のホイスト5A、5Bを共に停止させるとともに、警報ブザー(図示せず)を鳴らすように制御する。
なお、この状態を解除するには、図示しないセレクタースイッチを手動に切り換えてから巻下げを行う。
【0055】
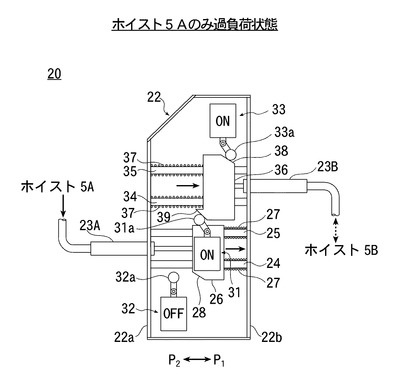
図8は、第1及び第2のホイストのうち一方のホイスト(第1のホイスト5A)にのみ過負荷が作用し、他方のホイスト(第2のホイスト5B)は無負荷状態の場合を示すものである。
例えば、第1のワイヤーロープ15Aが何かに引っ掛かるなどして過負荷状態となった場合には、図7(a)に示す正常状態から、ホイスト制御装置20の第1の入力側シリンダ23Aにおける圧力が大きくなり、第1の駆動部材26が押圧されて矢印P1方向へ移動する。
【0056】
その一方、第2の入力側シリンダ23Bの圧力が無負荷状態になるため、予め設定した圧縮コイルばね37の付勢力によって、第2の駆動部材36が矢印P1方向へ移動する。
その結果、図8に示すように、第3のリミットスイッチ33の動作ピン33aが第2の駆動部材36の第1の係止駆動部38と当接して第3のリミットスイッチ33がオン状態になる。
その後は、制御手段50からの命令によって、第1及び第2のホイスト5A、5Bの運転を共に停止するように制御する。
【0057】
以上述べたように本実施の形態においては、第1及び第2のホイスト5A、5Bの減速機7A、7Bに設けられた第1及び第2のトルクアーム10A、10Bの回転力をそれぞれ油圧機構によって第1及び第2の駆動部材26、36に伝達し、これら駆動部材26、36をガイド棒24及び25、34及び35に沿ってばね力に抗して移動させ、当該駆動機構の動作によって第1〜第3のリミットスイッチ31〜33のオン/オフをそれぞれ切り換える。そして、第1〜第3のリミットスイッチ31〜33にて得られた結果に基づいて制御手段50からの命令によって揚重設備1の原動機6A、6Bの動作を制御するようにしたことから、防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、また複雑な検出手段を用いることなく、第1及び第2のホイスト5A、5Bのワイヤーロープ15A、15Bにそれぞれ加わる荷重の検出及びその合算とを簡単な構成で行い、ワイヤーロープ15A、15B相互間のずれを調整して揚重設備1を所望の状態に自動制御することができる。
【0058】
特に本実施の形態によれば、ガイド機構(第1及び第2の駆動部材、第1及び第2のガイド棒24及び25、第3及び第4のガイド棒34及び35)の大きさ・形状、圧縮コイルばね27、37のばね定数を適宜調整することによって、第1及び第2のホイスト5A、5Bのワイヤーロープ15A、15Bにそれぞれ加わる荷重の検出及びその合算の条件を任意に設定することができるとともに、現在広く用いられているホイストを用いた揚重設備に適用可能なホイスト制御装置20を簡素な構成で提供することができる。
【0059】
また、本実施の形態では、第1〜第3のリミットスイッチ31〜33のうち第1のリミットスイッチ31が、第1の駆動部材26に固定されるとともに、第1のリミットスイッチ31が、第2の駆動部材36の動作によってオン/オフが切り換えられるように構成されているため、より小型で設計の自由度の大きいホイスト制御装置20を簡素な構成で提供することができる。
【0060】
しかも、第1及び第2の駆動部材26、36が、平行な方向に移動するように構成されるとともに、第1の駆動部材26に固定された第1のリミットスイッチ31が、第2の駆動部材36の動作によってオン/オフが切り換えられるように構成されているので、より小型で確実に機械式センサを動作させることが可能なホイスト制御装置20を提供することができる。
【0061】
そして、以上のような本実施の形態のホイスト制御装置20を備えることにより、第1及び第2のホイスト5A、5Bのワイヤーロープ15A、15Bにそれぞれ加わる荷重の検出及びその合算とを合理的且つ簡単な構成で行い、所望の状態に自動制御可能な揚重設備1を安価に提供することができる。
【0062】
なお、本発明は上述の実施の形態に限られることなく、種々の変更を行うことができる。
例えば、本発明に用いる駆動機構は、上記実施の形態のものには限られず、駆動部材の大きさ・形状・係止駆動部の位置や、ガイド棒の大きさ・形状は、適宜変更することができる。さらに、圧縮コイルばねのみならず、引張コイルばねを用いることも可能である。
ただし、装置の小型・簡素化の観点からは、上記実施の形態の構成を採用することが好ましい。
【0063】
さらに、上述の実施の形態においては、ホイストの巻上時の動作を例にとって説明したが、本発明はこれに限られず、巻下時にも適用できることはもちろんである。
ただし、巻上時巻下時には、動作させるホイスト及びその運転方向が上記実施の形態の場合と逆になるものである。
【0064】
加えて、上述の実施の形態においては、電気式の原動機を用いた場合を例にとって説明したが、本発明はこれに限られず、空気式の原動機を用いた場合にも適用することができる。
ただし、本発明は、二台の電気式の原動機を用いた場合にロープ速度のずれに起因して生ずる片側のロープのたるみ等に対して最も有効となるものである。
【図面の簡単な説明】
【0065】
【図1】本発明に係る揚重設備の実施の形態の全体を示す概略構成図
【図2】同揚重設備に適用されるホイストの内部構成を示す断面図
【図3】(a)(b):荷役物の吊り下げ状態を示す説明図
【図4】本発明に係るホイスト制御装置の実施の形態の構成及び動作を示す概略構成図
【図5】同ホイスト制御装置において第1及び第2のホイストが正常に動作している状態を示す説明図
【図6】(a)(b):同ホイスト制御装置において第1及び第2のホイストのうち一方のホイストのワイヤーロープが先に張って負荷が作用した場合の状態を示す説明図
【図7】(a)(b):同ホイスト制御装置において第1及び第2のホイストに過負荷が作用した場合の状態を示す説明図
【図8】同ホイスト制御装置において第1及び第2のホイストのうち一方のホイストにのみ過負荷が作用し、他方のホイストは無負荷状態の場合を示す説明図
【符号の説明】
【0066】
1…揚重設備、5(5A、5B)…ホイスト、6…原動機、7…減速機、8…ドラム(巻取ドラム)、10(10A、10B)…トルクアーム、20…ホイスト制御装置、21A、21B…出力側シリンダ、23A、23B…入力側シリンダ、26…第1の駆動部材、31〜33…リミットスイッチ、36…第2の駆動部材、40…荷役物、50…制御手段
【技術分野】
【0001】
本発明は、荷役物を複数のホイストで吊り上げる揚重設備において、複数のホイストの動作を制御する技術に関する。
【背景技術】
【0002】
一般に、防爆を要求される危険度の高い揚重設備にあっては、ホイストによって荷役物を吊り上げる場合に、複数台、通常は二台のホイストを使用する。これは、二台のホイストのうち一台が故障したり、吊り下げ用のロープのうち一本が破断した場合等のトラブルが発生した場合であっても、残りのホイスト、ロープで吊り上げることができるのがその理由である。
また、荷役物を吊り上げる際に設定値を超える負荷がホイストに加わった場合、吊り上げを中止したり警報を発するなどの安全対策を講じる必要があり、そのためにロープに加わる荷重を検出する装置を備えることも広く知られている。
【0003】
例えば低揚程であってシーブを動滑車として使用するホイストにおいて、ホイストの適所に固定したロープの固定端に加わる荷重とこのロープの荷役物を吊った先端側に加わる荷重とがほぼ等しいものと考え、固定端に荷重検出装置を設置したものも提案されている。
【0004】
しかし、動滑車を使用しない高揚程向けのホイストにあっては、ロープはホイストの適所に固定されないので、ロープに加わる荷重を直接検出することができない。また、ホイストが設置されている環境が例えば可燃性のガスや粉塵を含んでいて防爆を要する場所である場合には、引火の心配があるため電気式の荷重検出装置を使用することが難しいという問題がある。
【0005】
さらに、複数台のホイストで一個の荷役物を吊り上げる揚重設備においては、個々のロープに加わる荷重を検出してその合計を求めることによりホイストに加わる負荷が設定値以下か以上かを判断させる必要があるが、個々のロープについて荷重検出装置を設け、更にそれらの検出値を合計する手段を設けるため全体が複雑化することを避けられない。加えて、前述のように完全な防爆を要する環境下では検定を受けた少数の電気式のしか使用できない、という制限がある。
【0006】
このような課題に鑑み、複数台のホイストのロープの個々に加わる荷重の検出とその合算とを非電気的に行なう荷重検出装置も提案されている(特許文献1参照)。
しかし、従来技術では、複数台(2台)のホイストを同時に運転させる際、各駆動モータの特性の相違に起因してロープ速度にずれが生じて片側のロープがたるんだ場合であっても、このたるみを調整することができないという問題がある。
【0007】
特に、2台のホイストを用いて例えばLNGタンク内部のポンプを引き上げる場合には、内部の状態を目視で確認することができないため、最初からロープ先端部においてずれが発生していることが多く、これを調整することは困難であった。
このようなロープのずれは、例えばロードセルのような検出手段を用いることにより調整することができるが、その場合には、装置構成が複雑になるとともに、コストアップを招くという問題がある。
【特許文献1】特開2002−53294号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、このような従来の技術の課題を解決するためになされたもので、その目的とするところは、防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、また複雑な検出手段を用いることなく、複数のホイストのロープに加わる荷重の検出及びその合算を簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御可能なホイスト制御装置を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するためになされた請求項1記載の発明は、原動機によって駆動され減速機によって減速駆動される巻取ドラムを有する複数のホイストを備え、前記巻取ドラムにそれぞれ巻回されたロープで荷役物を吊り上げる揚重設備に適用可能なホイスト制御装置であって、前記複数のホイストにそれぞれ設けられ、前記減速機の出力軸に固定され当該減速機の回転反力によってロープ繰出し方向へのみ回転動作するように構成された複数の動力伝達部材と、前記複数の動力伝達部材の回転力を油圧シリンダを介して伝達する複数の油圧機構と、所定のガイド機構に沿って移動自在に構成され、前記油圧機構からの伝達力がそれぞれ与えられるとともに、所定のばね力に抗して移動する駆動部材を有する複数の駆動機構と、前記複数の駆動機構の動作によってオン/オフが切り換えられるように構成された複数の機械式センサとを備え、前記複数の機械式センサにて得られた結果に基づいて前記原動機の動作を同期制御するように構成されたホイスト制御装置である。
請求項2記載の発明は、請求項1記載の発明において、前記複数のホイストが、第1及び第2のホイストを有するとともに、前記複数の駆動機構が、前記第1及び第2のホイストに対応して構成された第1及び第2の駆動部材を有し、さらに、前記複数の機械式センサが、前記第1及び第2の駆動部材の動作によってオン/オフが切り換えられるように構成された第1〜第3の機械式センサを有し、前記第1〜第3の機械式センサのうちのいずれかが、前記第1及び第2の駆動部材のうちのいずれかに固定されるとともに、当該駆動部材に固定された前記機械式センサが、当該他の駆動部材の動作によってオン/オフが切り換えられるように構成されているものである。
請求項3記載の発明は、原動機によって駆動され減速機によって減速駆動される巻取ドラムを有する複数のホイストを備え、前記巻取ドラムにそれぞれ巻回されたロープで荷役物を吊り上げる揚重設備であって、請求項1又は2のいずれか1項記載のホイスト制御装置を備えた揚重設備である。
【0010】
本発明のホイスト制御装置の場合、複数のホイストの減速機に設けられた複数の動力伝達部材の回転力をそれぞれ油圧機構によって複数の駆動機構に伝達し、当該駆動機構をガイド機構に沿って所定のばね力に抗して移動させ、当該駆動機構の動作によって複数の機械式センサのオン/オフをそれぞれ切り換える。そして、これら複数の機械式センサにて得られた結果に基づいて揚重設備の原動機の動作を同期制御するようにしたことから、防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、また複雑な検出手段を用いることなく、複数のホイストのロープにそれぞれ加わる荷重の検出及びその合算とを合理的且つ簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御することができる。
【0011】
特に本発明では、複数の駆動機構をガイド機構に沿って所定のばね力に抗して移動させ、これにより複数の機械式センサのオン/オフをそれぞれ切り換えることから、ガイド機構の大きさ・形状、当該ばね力の値(ばね定数)を適宜調整することによって、複数のホイストのロープにそれぞれ加わる荷重の検出及びその合算の条件を任意に設定することができる。
【0012】
本発明において、複数のホイストが、第1及び第2のホイストを有するとともに、複数の駆動機構が、第1及び第2のホイストに対応して構成された第1及び第2の駆動部材を有し、さらに、複数の機械式センサが、第1及び第2の駆動部材の動作によってオン/オフが切り換えられるように構成された第1〜第3の機械式センサを有し、第1〜第3の機械式センサのうちのいずれかが、第1及び第2の駆動部材のうちのいずれかに固定されるとともに、当該駆動部材に固定された機械式センサが、当該他の駆動部材の動作によってオン/オフが切り換えられるように構成されている場合には、現在広く用いられている揚重設備に適用可能なホイスト制御装置として、より小型で設計の自由度の大きいホイスト制御装置を簡素な構成で提供することができる。
【0013】
そして、以上のようなホイスト制御装置を備えることにより、複数のホイストのロープにそれぞれ加わる荷重の検出及びその合算とを合理的且つ簡単な構成で行い、所望の状態に自動制御可能な揚重設備を安価に提供することができる。
【発明の効果】
【0014】
本発明によれば、防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、また複雑な検出手段を用いることなく、複数のホイストのロープに加わる荷重の検出及びその合算を簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御可能なホイスト制御装置を提供することができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明の好ましい実施の形態を図面を参照して詳細に説明する。
図1は、本発明に係る揚重設備の実施の形態の全体を示す概略構成図、図2は、同揚重設備に適用されるホイストの内部構成を示す断面図である。
また、図3(a)(b)は、荷役物の吊り下げ状態を示す説明図、図4は、本発明に係るホイスト制御装置の実施の形態を示す概略構成図である。
【0016】
図1に示すように、本実施の形態のホイスト制御装置20は、公知の揚重設備1に適用されるものである。
この揚重設備1は、形鋼から構成されるレール2に沿って走行する台車部3を有し、この台車部3にフレーム4が固定され吊り下げられている。このフレーム4には複数のホイスト5(本実施の形態の場合は二台のホイスト5A、5B)がレール2を挟む位置において互いに平行に保持されている。
【0017】
各ホイスト5A、5Bは、図2に示すように、同一中心軸線上に配置して出力軸6a、入力軸7aを互いに結合した、防爆型ブレーキモータからなる電気式の原動機6と、減速機7と、減速機7を囲むように減速機7と同心に配置したドラム(巻取ドラム)8とを有している。
この減速機7は遊星歯車式のもので、取付部材9を介してドラム8内に固定されるとともに、その出力軸7bとトルクアーム10(10A、10B:動力伝達部材)がキイ結合により固着され、さらにこのトルクアーム10の本体部10aが、フレーム4の正面側壁4aに軸受11によって回転可能に支持されている。
【0018】
また、上述した原動機6は、取付部材6bを介してフレーム4の後面側壁4bに取り付けられている。そして、ドラム8の内部には、フレーム4の後面側壁4b近傍において、ボス12a、12bを有する円板支持部材12が固定され、一方のボス12a外面がフレーム4の後面側壁4bに軸受13を介して回転可能に支持されるとともに、他方のボス12b内面が軸受14を介して減速機7の入力軸7aに回転可能に支持されている。
【0019】
第1及び第2のホイスト5A、5Bは、それぞれワイヤーロープ15A、15Bが巻回されており、それぞれ対向する側面側から各ワイヤーロープ15A、15Bを互いに接近して平行に下方へ垂下させ、各ドラム8A、8Bを互いに反対方向へ回転させることにより各ワイヤーロープ15A、15Bを同時に巻き取り又は繰り出すように構成されている。
そして、各ワイヤーロープ15A、15Bの先端部は三角プレート16の両端部に連結され、この三角プレート16の下端部に取り付けたフック17に荷役物40を引っ掛けるようになっている(図3(a)(b)参照)。
【0020】
上述したように、トルクアーム10はフレーム4の正面側壁4aに回転可能に支持されている。このため、本実施の形態では、各ドラム8A、8Bのロープ巻取方向へ回転した場合にトルクアーム10A、10Bと当接することでトルクアーム10A、10Bの回転を阻止するためのストッパ18A、18Bが、フレーム4の例えば正面側壁4aに設けられている。
【0021】
一方、本実施の形態においては、トルクアーム10A、10Bのロープ繰出方向への力を検出して出力するための、油圧シリンダからなる第1及び第2の出力側シリンダ21A、21Bが設けられている。
ここで、第1及び第2の出力側シリンダ21A、21Bは、それぞれのピストンロッド21a、21bがトルクアーム10A、10Bの先端部に回動自在に連結されている。そして、荷役物40の吊り上げ時にトルクアーム10A、10Bに発生するロープ繰出方向の回転力が各シリンダ21A、21Bのピストンロッド21a、21bに伝達されるように構成されている。
【0022】
さらに、第1のホイスト5Aの第1の出力側シリンダ21Aと、第2のホイスト5Bの第2の出力側シリンダ21Bは、以下に説明するホイスト制御装置20に接続されている。そして、荷役物40の吊り上げ時に各シリンダ21A、21Bのトルクアーム10A、10Bに発生するロープ繰出方向の回転力が、ホイスト制御装置20に伝達されるようになっている。
【0023】
図4に示すように、本実施の形態のホイスト制御装置20は、装置本体としてほぼ矩形状のフレーム22を有している。
このフレーム22には、直線状に延びる一対の取付部22a、22bが平行に対向配置されており、各取付部22a、22bに、それぞれ油圧シリンダからなる第1及び第2の入力側シリンダ23A、23Bが取り付けられている。
【0024】
これら第1及び第2の入力側シリンダ23A、23Bは、上述した第1及び第2の出力側シリンダ21A、21Bにそれぞれ接続されて油圧機構が構成され、第1及び第2の出力側シリンダ21A、21Bにて生じた圧力がそれぞれ伝達入力されるようになっている。
【0025】
ここで、第1の入力側シリンダ23Aは、そのピストンロッド23aがフレーム22の内側に位置するように一方の取付部22aに取り付けられている。
また、第2の入力側シリンダ23Bは、そのピストンロッド23bがフレーム22の内側に位置するように他方の取付部22bに取り付けられている。
【0026】
この場合、第1及び第2の入力側シリンダ23A、23Bは、フレーム22の取付部22a、22bの延びる方向に関して所定の距離だけ離間するように配置構成されている。
また、第1及び第2の入力側シリンダ23A、23Bは、それぞれのピストンロッド23a、23bが、取付部22a、22bの延びる方向に対して直交する方向(例えば、図中矢印P1又P2は方向)に動作するように取付方向が定められている。
【0027】
フレーム22の内側であって、第1の入力側シリンダ23Aの両側には、取付部22a、22bの延びる方向に対して直交する方向に延びる第1及び第2のガイド棒(ガイド機構)24、25が所定の間隔をおいて設けられている。
これら第1及び第2のガイド棒24、25は、それぞれ直線状に形成されている。そして、第1及び第2のガイド棒24、25には、平板状の第1の駆動部材26が、第1及び第2のガイド棒24、25に沿って摺動可能な状態で装着されている。
【0028】
ここで、第1の駆動部材26は、第1の入力側シリンダ23Aのピストンロッド23aに固定され、第1の入力側シリンダ23Aの駆動力によって第1及び第2のガイド棒24、25に沿って移動するように駆動機構が構成されている。
また、第1の駆動部材26の、第1の入力側シリンダ23Aのピストンロッド23a固定側と反対側の領域には、各ガイド棒24、25の周囲に例えば同一の圧縮コイルばね27が装着されている。
【0029】
そして、第1の入力側シリンダ23Aを動作させて第1の駆動部材26を矢印P1方向に移動させることにより、圧縮コイルばね27が圧縮され、その反力が第1の駆動部材26に対して与えられるように構成されている。
第1の駆動部材26は、第1及び第2のガイド棒24、25より幅広に形成されており、第1のガイド棒24側に若干はみ出す部分を有している。そして、第1の駆動部材26のはみ出した部分の第1の入力側シリンダ23A側の部位には、第1の駆動部材26の移動方向、すなわち、第1及び第2のガイド棒24、25の延びる方向に対して例えば鋭角に傾斜させたテーパ状の係止駆動部28が形成されている。
さらに、第1の駆動部材26上には、第1のリミットスイッチ31が配設されている。
【0030】
図4に示すように、本実施の形態では、第1のリミットスイッチ31の動作ピン31aが、第2のガイド棒25に対して側方に位置するように配置され、矢印P2方向に傾斜することによってオンとなるように構成されている。
なお、この第1のリミットスイッチ31及び後述する第2及び第3のリミットスイッチ32、33は、それぞれ動作ピン31a、32a、33aが傾いている状態がオンとなるものである。
【0031】
一方、フレーム22の内側には、上述した第1及び第2のガイド棒24、25のうち第1のガイド棒24側の領域に、第2のリミットスイッチ32が配設されている。
本実施の形態では、第2のリミットスイッチ32の動作ピン32aが、第1の駆動部材26の移動によってその係止駆動部28と当接し又はその当接が解除されることにより、第2のリミットスイッチ32のオン/オフが行われるように構成されている。
【0032】
他方、フレーム22の内側であって、第2の入力側シリンダ23Bの両側には、取付部22a、22bの延びる方向に対して直交する方向(P1又はP2方向)に延びる第3及び第4のガイド棒34、35が所定の間隔をおいて設けられている。
これら第3及び第4のガイド棒34、35は、それぞれ直線状に形成されている。そして、第3及び第4のガイド棒34、35には、平板状の第2の駆動部材36が、第3及び第4のガイド棒34、35に沿って摺動可能な状態で装着されている。
【0033】
本実施の形態の場合、これら第3及び第4のガイド棒34、35と、上述した第1及び第2のガイド棒24、25とは、ほぼ同一の平面内に位置するように配置構成されている。
【0034】
第2の駆動部材36は、第2の入力側シリンダ23Bのピストンロッド23bに固定され、第2の入力側シリンダ23Bの駆動力によって第3及び第4のガイド棒34、35に沿ってP1又はP2方向に移動するように駆動機構が構成されている。
【0035】
また、第3及び第4のガイド棒34、35の周囲には、第2の駆動部材36の、第2の入力側シリンダ23Bのピストンロッド23b固定側と反対側の領域に、例えば同一の圧縮コイルばね37が装着されている。
そして、第2の入力側シリンダ23Bを動作させて第2の駆動部材36を矢印P2方向に移動させることにより、圧縮コイルばね37が圧縮され、その反力が第2の駆動部材36に対して与えられるように構成されている。
【0036】
ここで、第2の駆動部材36は、第3及び第4のガイド棒34、35より幅広に形成され、第3及び第4のガイド棒34、35の両側に若干はみ出す部分を有している。
そして、第2の駆動部材36のはみ出した部分のうち、第4のガイド棒35側の第2の入力側シリンダ23B側の部位には、第2の駆動部材36の移動方向、すなわち、第3及び第4のガイド棒34、35の延びる方向に対して例えば鋭角に傾斜させたテーパ状の第1の係止駆動部38が形成されている。
【0037】
一方、フレーム22の内側の、上記第3及び第4のガイド棒34、35のうち第4のガイド棒35の側方の領域には、第3のリミットスイッチ33が配設されている。
そして、第3のリミットスイッチ33の動作ピン33aが、第2の駆動部材36の第1の係止駆動部38と当接し又はその当接が解除されることにより、第3のリミットスイッチ33のオン/オフが行われるように構成されている。
【0038】
また、第2の駆動部材36のはみ出した部分のうち第3のガイド棒34側の第2の入力側シリンダ23Bと反対側の部位には、第2の駆動部材36の移動方向、すなわち、第3及び第4のガイド棒34、35の延びる方向に対して例えば鋭角に傾斜させたテーパ状の第2の係止駆動部39が形成されている。
そして、上述した第1のリミットスイッチ31の動作ピン31aが、第2の駆動部材36の第2の係止駆動部39と当接し又はその当接が解除されることにより、第1のリミットスイッチ31のオン/オフが行われるように構成されている。
【0039】
さらに、これら第1〜第3のリミットスイッチ31〜33は、例えば揚重設備1のフレーム4に設けた制御手段50に接続され、第1〜第3のリミットスイッチ31〜33にて得られた結果に基づき、上述した第1及び第2のホイスト5A、5Bの原動機6A、6Bの動作を制御するように回路が構成されている。
【0040】
以下、本実施の形態の動作について、巻上時の動作を例にとって説明する。
ここで、図4は、第1及び第2のホイスト5A、5Bのワイヤーロープ15A、15Bに荷重が作用していない状態を示すもの、図5は、第1及び第2のホイスト5A、5Bが正常に動作している状態を示すものである。
【0041】
図4に示すように、本実施の形態では、無負荷運転時において、圧縮コイルばね27の付勢力によって第1の駆動部材26が第1の入力側シリンダ23A側に配置されるようになっており、その結果、係止駆動部28が第2のリミットスイッチ32の動作ピン32aと当接して、第2のリミットスイッチ32がオン状態になる。
【0042】
また同様に、圧縮コイルばね37の付勢力によって第2の駆動部材36が第2の入力側シリンダ23B側に配置され、その結果、第1の係止駆動部38が第3のリミットスイッチ33の動作ピン33aと当接して、第3のリミットスイッチ33がオン状態になる。
さらに、この状態では、第1のリミットスイッチ31の動作ピン31aと第2の駆動部材36の第2の係止駆動部39は当接していないため、第1のリミットスイッチ31は、オフ状態となっている。
【0043】
図4に示す状態において、ドラム8に巻回されたワイヤーロープ15A、15Bに荷重が作用すると、トルクアーム10A、10Bがロープ繰出方向に回転し、その結果、第1及び第2の出力側シリンダ21A、21Bのピストンロッド21a、21bをそれぞれ押圧し、その圧力が、ホイスト制御装置20の第1及び第2の入力側シリンダ23A、23Bへ伝達される。
そして、ホイスト制御装置20の第1及び第2の入力側シリンダ23A、23Bに圧力が発生すると、第1の駆動部材26が押圧されて矢印P1方向へ移動するとともに、第2の駆動部材36が押圧されて矢印P2方向へ移動する。
【0044】
その結果、図5に示すように、第1及び第2のガイド棒24、25に装着した圧縮コイルばね27と、第3及び第4のガイド棒34、35に装着した圧縮コイルばね37が、それぞれ圧縮されてその弾性力(反力)が次第に大きくなり、第1及び第2の入力側シリンダ23A、23Bからの押圧力とつり合った位置で第1及び第2の駆動部材23A、23Bが停止する。
【0045】
本実施の形態では、このような無負荷運転時において、第1〜第3のリミットスイッチ31〜33がオフ状態になるように、圧縮コイルばね27、37のばね定数、第1及び第2の駆動部材23A、23Bのサイズ及び配置、第1〜第3のリミットスイッチ31〜33のサイズ及び配置等の種々の条件を設定する。
【0046】
ここでは、第1のリミットスイッチ31の動作ピン31aと、第3のリミットスイッチ33の動作ピン33aの軸間の距離をaとする。また、第2のリミットスイッチ32の動作ピン32aと、第3のリミットスイッチ33の動作ピン33aの軸間の距離をbとする。
そして、これらの距離a、bの和に相当するばね圧縮量が吊り荷重に相当している。図3(a)から図3(b)、図3(b)から図3(a)への変化に対し、吊り荷重が一定の場合において、a+b=一定となるように設定されている。
【0047】
図6(a)(b)は、第1及び第2のホイスト5A、5Bのうち一方のホイスト(例えば、第1のホイスト5A)のワイヤーロープ15Aが先に張って定格負荷が作用した場合の状態を示すものである(図3(a)参照)。
この場合においては、第1の入力側シリンダ23Aの圧力が高くなるため、第1の駆動部材26が矢印P1方向へ移動して圧縮コイルばね27が圧縮され、その結果、第2のリミットスイッチ32が解除(OFF)される。
【0048】
その一方、第2の入力側シリンダ23Bの圧力が相対的に低くなるため、予め設定した圧縮コイルばね37の付勢力によって、第2の駆動部材36が矢印P1方向へ移動し、その結果、第3のリミットスイッチ33がオンになる。
ここで、制御手段50からの命令によって第1のホイスト5Aの原動機6Aを停止させ、第2のホイスト5Bの原動機6Bのみを巻上運転させる。その後、図示しないタイマーを用いて第2のホイスト5Bを所定量(例えば90mm程度)移動(巻上げ)し、第3のリミットスイッチ33のオン状態が解除されるように、この巻上動作を所定回数続ける(例えば、3回)。
【0049】
これは所謂インチングをさせることではなく、第2のホイスト5Bを駆動させる毎に条件を新たに測定して上述した巻上動作を繰り返すもので、ワイヤーロープ15Bが張るように連続して動作を行う。
そして、第3のリミットスイッチ33が解除(OFF)された後は、図6(b)に示すように、正常運転状態として、制御手段50からの命令によって、第1及び第2のホイスト5A、5B共に巻上運転を行うように制御する。
【0050】
一方、上述した巻上動作を繰り返した場合であっても、第3のリミットスイッチ33が解除(OFF)されない場合には、第1及び第2のホイスト5A、5Bの動作を停止し、装置の点検を行う。
【0051】
図7(a)(b)は、第1及び第2のホイスト5A、5Bに過負荷が作用した場合の状態を示すものである。
上述したように、正常な状態では、ワイヤーロープ15A、15Bが均等にドラム8に巻回され、三角プレート16を水平を保持した状態で巻き上げられる。
【0052】
この状態において、荷役物40が何かに引っ掛かるなどして過負荷状態となった場合には、図7(a)に示す正常状態から、ホイスト制御装置20の第1及び第2の入力側シリンダ23A、23Bにおける圧力が大きくなり、第1の駆動部材26が押圧されて矢印P1方向へ移動するとともに、第2の駆動部材36が押圧されてP2方向へ移動する。
その結果、図7(b)に示すように、第1のリミットスイッチ31の動作ピン31aが第2の駆動部材36の第1の係止駆動部38と当接して第1のリミットスイッチ31がオン状態になる。
【0053】
一方、第2のリミットスイッチ32の動作ピン32aと第1の駆動部材26の係止駆動部28とは離間する。また、第3のリミットスイッチ33の動作ピン33aと第2の駆動部材36の第1の係止駆動部38とについても離間する。
【0054】
これにより、第1のリミットスイッチ31のみがオン状態になる。
この状態となった場合には、制御手段50からの命令によって、第1及び第2のホイスト5A、5Bを共に停止させるとともに、警報ブザー(図示せず)を鳴らすように制御する。
なお、この状態を解除するには、図示しないセレクタースイッチを手動に切り換えてから巻下げを行う。
【0055】
図8は、第1及び第2のホイストのうち一方のホイスト(第1のホイスト5A)にのみ過負荷が作用し、他方のホイスト(第2のホイスト5B)は無負荷状態の場合を示すものである。
例えば、第1のワイヤーロープ15Aが何かに引っ掛かるなどして過負荷状態となった場合には、図7(a)に示す正常状態から、ホイスト制御装置20の第1の入力側シリンダ23Aにおける圧力が大きくなり、第1の駆動部材26が押圧されて矢印P1方向へ移動する。
【0056】
その一方、第2の入力側シリンダ23Bの圧力が無負荷状態になるため、予め設定した圧縮コイルばね37の付勢力によって、第2の駆動部材36が矢印P1方向へ移動する。
その結果、図8に示すように、第3のリミットスイッチ33の動作ピン33aが第2の駆動部材36の第1の係止駆動部38と当接して第3のリミットスイッチ33がオン状態になる。
その後は、制御手段50からの命令によって、第1及び第2のホイスト5A、5Bの運転を共に停止するように制御する。
【0057】
以上述べたように本実施の形態においては、第1及び第2のホイスト5A、5Bの減速機7A、7Bに設けられた第1及び第2のトルクアーム10A、10Bの回転力をそれぞれ油圧機構によって第1及び第2の駆動部材26、36に伝達し、これら駆動部材26、36をガイド棒24及び25、34及び35に沿ってばね力に抗して移動させ、当該駆動機構の動作によって第1〜第3のリミットスイッチ31〜33のオン/オフをそれぞれ切り換える。そして、第1〜第3のリミットスイッチ31〜33にて得られた結果に基づいて制御手段50からの命令によって揚重設備1の原動機6A、6Bの動作を制御するようにしたことから、防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、また複雑な検出手段を用いることなく、第1及び第2のホイスト5A、5Bのワイヤーロープ15A、15Bにそれぞれ加わる荷重の検出及びその合算とを簡単な構成で行い、ワイヤーロープ15A、15B相互間のずれを調整して揚重設備1を所望の状態に自動制御することができる。
【0058】
特に本実施の形態によれば、ガイド機構(第1及び第2の駆動部材、第1及び第2のガイド棒24及び25、第3及び第4のガイド棒34及び35)の大きさ・形状、圧縮コイルばね27、37のばね定数を適宜調整することによって、第1及び第2のホイスト5A、5Bのワイヤーロープ15A、15Bにそれぞれ加わる荷重の検出及びその合算の条件を任意に設定することができるとともに、現在広く用いられているホイストを用いた揚重設備に適用可能なホイスト制御装置20を簡素な構成で提供することができる。
【0059】
また、本実施の形態では、第1〜第3のリミットスイッチ31〜33のうち第1のリミットスイッチ31が、第1の駆動部材26に固定されるとともに、第1のリミットスイッチ31が、第2の駆動部材36の動作によってオン/オフが切り換えられるように構成されているため、より小型で設計の自由度の大きいホイスト制御装置20を簡素な構成で提供することができる。
【0060】
しかも、第1及び第2の駆動部材26、36が、平行な方向に移動するように構成されるとともに、第1の駆動部材26に固定された第1のリミットスイッチ31が、第2の駆動部材36の動作によってオン/オフが切り換えられるように構成されているので、より小型で確実に機械式センサを動作させることが可能なホイスト制御装置20を提供することができる。
【0061】
そして、以上のような本実施の形態のホイスト制御装置20を備えることにより、第1及び第2のホイスト5A、5Bのワイヤーロープ15A、15Bにそれぞれ加わる荷重の検出及びその合算とを合理的且つ簡単な構成で行い、所望の状態に自動制御可能な揚重設備1を安価に提供することができる。
【0062】
なお、本発明は上述の実施の形態に限られることなく、種々の変更を行うことができる。
例えば、本発明に用いる駆動機構は、上記実施の形態のものには限られず、駆動部材の大きさ・形状・係止駆動部の位置や、ガイド棒の大きさ・形状は、適宜変更することができる。さらに、圧縮コイルばねのみならず、引張コイルばねを用いることも可能である。
ただし、装置の小型・簡素化の観点からは、上記実施の形態の構成を採用することが好ましい。
【0063】
さらに、上述の実施の形態においては、ホイストの巻上時の動作を例にとって説明したが、本発明はこれに限られず、巻下時にも適用できることはもちろんである。
ただし、巻上時巻下時には、動作させるホイスト及びその運転方向が上記実施の形態の場合と逆になるものである。
【0064】
加えて、上述の実施の形態においては、電気式の原動機を用いた場合を例にとって説明したが、本発明はこれに限られず、空気式の原動機を用いた場合にも適用することができる。
ただし、本発明は、二台の電気式の原動機を用いた場合にロープ速度のずれに起因して生ずる片側のロープのたるみ等に対して最も有効となるものである。
【図面の簡単な説明】
【0065】
【図1】本発明に係る揚重設備の実施の形態の全体を示す概略構成図
【図2】同揚重設備に適用されるホイストの内部構成を示す断面図
【図3】(a)(b):荷役物の吊り下げ状態を示す説明図
【図4】本発明に係るホイスト制御装置の実施の形態の構成及び動作を示す概略構成図
【図5】同ホイスト制御装置において第1及び第2のホイストが正常に動作している状態を示す説明図
【図6】(a)(b):同ホイスト制御装置において第1及び第2のホイストのうち一方のホイストのワイヤーロープが先に張って負荷が作用した場合の状態を示す説明図
【図7】(a)(b):同ホイスト制御装置において第1及び第2のホイストに過負荷が作用した場合の状態を示す説明図
【図8】同ホイスト制御装置において第1及び第2のホイストのうち一方のホイストにのみ過負荷が作用し、他方のホイストは無負荷状態の場合を示す説明図
【符号の説明】
【0066】
1…揚重設備、5(5A、5B)…ホイスト、6…原動機、7…減速機、8…ドラム(巻取ドラム)、10(10A、10B)…トルクアーム、20…ホイスト制御装置、21A、21B…出力側シリンダ、23A、23B…入力側シリンダ、26…第1の駆動部材、31〜33…リミットスイッチ、36…第2の駆動部材、40…荷役物、50…制御手段
【特許請求の範囲】
【請求項1】
原動機によって駆動され減速機によって減速駆動される巻取ドラムを有する複数のホイストを備え、前記巻取ドラムにそれぞれ巻回されたロープで荷役物を吊り上げる揚重設備に適用可能なホイスト制御装置であって、
前記複数のホイストにそれぞれ設けられ、前記減速機の出力軸に固定され当該減速機の回転反力によってロープ繰出し方向へのみ回転動作するように構成された複数の動力伝達部材と、
前記複数の動力伝達部材の回転力を油圧シリンダを介して伝達する複数の油圧機構と、
所定のガイド機構に沿って移動自在に構成され、前記油圧機構からの伝達力がそれぞれ与えられるとともに、所定のばね力に抗して移動する駆動部材を有する複数の駆動機構と、
前記複数の駆動機構の動作によってオン/オフが切り換えられるように構成された複数の機械式センサとを備え、
前記複数の機械式センサにて得られた結果に基づいて前記原動機の動作を同期制御するように構成されたホイスト制御装置。
【請求項2】
前記複数のホイストが、第1及び第2のホイストを有するとともに、前記複数の駆動機構が、前記第1及び第2のホイストに対応して構成された第1及び第2の駆動部材を有し、さらに、前記複数の機械式センサが、前記第1及び第2の駆動部材の動作によってオン/オフが切り換えられるように構成された第1〜第3の機械式センサを有し、
前記第1〜第3の機械式センサのうちのいずれかが、前記第1及び第2の駆動部材のうちのいずれかに固定されるとともに、当該駆動部材に固定された前記機械式センサが、当該他の駆動部材の動作によってオン/オフが切り換えられるように構成されている請求項1記載のホイスト制御装置。
【請求項3】
原動機によって駆動され減速機によって減速駆動される巻取ドラムを有する複数のホイストを備え、前記巻取ドラムにそれぞれ巻回されたロープで荷役物を吊り上げる揚重設備であって、
請求項1又は2のいずれか1項記載のホイスト制御装置を備えた揚重設備。
【請求項1】
原動機によって駆動され減速機によって減速駆動される巻取ドラムを有する複数のホイストを備え、前記巻取ドラムにそれぞれ巻回されたロープで荷役物を吊り上げる揚重設備に適用可能なホイスト制御装置であって、
前記複数のホイストにそれぞれ設けられ、前記減速機の出力軸に固定され当該減速機の回転反力によってロープ繰出し方向へのみ回転動作するように構成された複数の動力伝達部材と、
前記複数の動力伝達部材の回転力を油圧シリンダを介して伝達する複数の油圧機構と、
所定のガイド機構に沿って移動自在に構成され、前記油圧機構からの伝達力がそれぞれ与えられるとともに、所定のばね力に抗して移動する駆動部材を有する複数の駆動機構と、
前記複数の駆動機構の動作によってオン/オフが切り換えられるように構成された複数の機械式センサとを備え、
前記複数の機械式センサにて得られた結果に基づいて前記原動機の動作を同期制御するように構成されたホイスト制御装置。
【請求項2】
前記複数のホイストが、第1及び第2のホイストを有するとともに、前記複数の駆動機構が、前記第1及び第2のホイストに対応して構成された第1及び第2の駆動部材を有し、さらに、前記複数の機械式センサが、前記第1及び第2の駆動部材の動作によってオン/オフが切り換えられるように構成された第1〜第3の機械式センサを有し、
前記第1〜第3の機械式センサのうちのいずれかが、前記第1及び第2の駆動部材のうちのいずれかに固定されるとともに、当該駆動部材に固定された前記機械式センサが、当該他の駆動部材の動作によってオン/オフが切り換えられるように構成されている請求項1記載のホイスト制御装置。
【請求項3】
原動機によって駆動され減速機によって減速駆動される巻取ドラムを有する複数のホイストを備え、前記巻取ドラムにそれぞれ巻回されたロープで荷役物を吊り上げる揚重設備であって、
請求項1又は2のいずれか1項記載のホイスト制御装置を備えた揚重設備。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−161277(P2009−161277A)
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願番号】特願2007−340067(P2007−340067)
【出願日】平成19年12月28日(2007.12.28)
【出願人】(000110022)トーヨーコーケン株式会社 (19)
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願日】平成19年12月28日(2007.12.28)
【出願人】(000110022)トーヨーコーケン株式会社 (19)
[ Back to top ]