
ボイドの検出方法
【課題】アンダーフィル充填条件を変更することがなく、半導体装置の電気的ショートを引き起こす虞をなくす。
【解決手段】基板14と、基板の第1主面14a側に裏面12bを臨ませて実装された半導体チップ12と、半導体チップ及び基板の間に充填されたアンダーフィル樹脂16とを備えた半導体装置10においてアンダーフィル樹脂中のボイドBを検出するに当たり、半導体装置に対して熱的刺激を加える第1工程と、熱的刺激を加えてから一定時間経過後の半導体装置の温度を測定する第2工程と、半導体装置の温度からボイドの有無を検出する第3工程とを備える。
【解決手段】基板14と、基板の第1主面14a側に裏面12bを臨ませて実装された半導体チップ12と、半導体チップ及び基板の間に充填されたアンダーフィル樹脂16とを備えた半導体装置10においてアンダーフィル樹脂中のボイドBを検出するに当たり、半導体装置に対して熱的刺激を加える第1工程と、熱的刺激を加えてから一定時間経過後の半導体装置の温度を測定する第2工程と、半導体装置の温度からボイドの有無を検出する第3工程とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、半導体チップと、半導体チップが実装される基板との間を充填するアンダーフィル樹脂中に存在するボイドの検出方法に関する。
【背景技術】
【0002】
近年、電子機器の小型化、軽量化、及び高機能化が進んでおり、それに伴い半導体チップを基板に直接接続して半導体装置を製造するフリップチップ実装が広く普及し始めている。それは、フリップチップ実装では実装面積を小さくできるとともに、配線長を短くできることから、半導体装置の電気的特性が改善されることによる。
【0003】
一般に、フリップチップ実装においては、半導体チップと基板とのはんだ付けなどの接合工程の後に、アンダーフィル充填工程が実施される。ハンダ導体チップ接合工程後に、接合継手箇所が度重なる加熱及び冷却を受けると、半導体チップと基板とでは熱膨張係数が大きく異なっているために、接合継手箇所で応力の集中と分散とが繰り返される。
【0004】
その結果、最悪の場合接合継手箇所が破断して導通不良が引き起こされる。これを防止するためにアンダーフィル充填が必要とされ、半導体チップと基板との間には、アンダーフィル樹脂と呼ばれる絶縁樹脂が充填される。このように、アンダーフィル充填は、半導体チップと基板との接合継手箇所への応力集中を防ぐために実施される。
【0005】
ところで、アンダーフィル充填工程においては充填不良が発生することがある。つまり、基板と半導体チップとの間を完全に充填すべきアンダーフィル樹脂にボイド(気泡)が発生する場合がある。アンダーフィル樹脂中にボイドが発生すると、ボイド内に位置する接合継手箇所で上述した応力の集中・分散が繰り返されるために、導通不良の原因となる。
【0006】
アンダーフィル樹脂中におけるボイドの検出に関しては、絶縁樹脂で被覆した金属粒を混合したアンダーフィル樹脂を用い、充填工程終了後にX線観察によりボイドの有無を検出する技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−250590号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に開示された技術では、たとえ絶縁樹脂で被覆されているとは言え、アンダーフィル樹脂に金属粒を混合するために、半導体装置の電気的なショートを引き起こす虞があった。
【0009】
また、金属粒が混合されたアンダーフィル樹脂は、充填工程時の流動特性が金属粒を含まないアンダーフィル樹脂と異なっている。そのため、金属粒が混合されたアンダーフィル樹脂を用いて充填を行う場合、アンダーフィル充填工程の諸条件を見直す必要があった。
【0010】
この出願に係る発明者は鋭意検討の結果、アンダーフィル充填工程終了後の半導体装置に対して熱的刺激を加えたときの当該半導体装置の温度の振る舞いが当該半導体装置に含まれるボイドに依存することを知見し、従って、この熱的刺激に対する応答としての半導体装置の温度を測定することにより上述した課題を解決できることに想到した。
【0011】
従って、この発明の目的は、アンダーフィル充填条件を変更することがないとともに、半導体装置の電気的ショートを引き起こす虞のない、アンダーフィル樹脂中のボイドの検出方法を提供することにある。
【課題を解決するための手段】
【0012】
上述した目的の達成を図るために、この発明のボイドの検出方法は、基板と、基板の第1主面側に裏面を臨ませて実装された半導体チップと、半導体チップ及び基板の間に充填されたアンダーフィル樹脂とを備えた半導体装置においてアンダーフィル樹脂中のボイドを検出するに当たって、以下の3工程を実施する。
【0013】
第1工程:半導体装置に対して熱的刺激を加える
第2工程:熱的刺激を加えてから一定時間経過後の半導体装置の温度を測定する
第3工程:半導体装置の温度からボイドの有無を検出する
【0014】
上述のボイドの検出方法の好ましい実施態様によれば、第2工程が、半導体チップの裏面に対向する表面の温度を測定する工程であるのがよい。
【0015】
上述のボイドの検出方法の別の好ましい実施態様によれば、第1工程が、半導体チップの表面に所定量の熱エネルギーを加える工程であり、第2工程が、第1工程の終了時刻から起算して一定時間後に表面の温度を測定する工程であり、第3工程が、表面の温度が第1閾値よりも高い場合にボイドが存在すると判断し、及び第1閾値以下の場合にボイドが存在しないと判断する工程であるのがよい。
【0016】
この場合において、好ましくは、第1工程が、表面に向けて一定出力のレーザ光を一定時間にわたり照射する工程であるのがよい。
【0017】
上述のボイドの検出方法のまた別の好ましい実施態様によれば、第1工程が、基板の第1主面に対向する第2主面に一定温度の熱源を接触させる工程であり、第2工程が、熱源が第2主面に接触した状態で行われ、第1工程の開始時刻から起算して一定時間後に半導体チップの表面の温度を測定する工程であるのがよい。
【0018】
この場合において、好ましくは、熱源が室温よりも温度が高い高温熱源であり、第3工程が、表面の温度が第2閾値よりも高い場合にボイドが存在しないと判断し、及び第2閾値以下の場合にボイドが存在すると判断する工程であるのがよい。
【0019】
この場合において、熱源が室温よりも温度が低い低温熱源であり、第3工程が、表面の温度が第3閾値よりも高い場合にボイドが存在すると判断し、及び第3閾値以下の場合にボイドが存在しないと判断する工程であるのがよい。
【発明の効果】
【0020】
この発明のボイドの検出方法では、「熱的刺激を加えてから一定時間経過後の半導体装置の温度を測定する」という簡易な方法で、アンダーフィル樹脂中のボイドの有無を検出することができる。その結果、この発明では、アンダーフィル充填条件を変更する必要がなく、さらに、半導体装置の電気的ショートを引き起こす虞もない。
【0021】
上述のボイドの検出方法において、半導体チップの表面の温度を測定する場合には、外部に露出しているチップ表面の温度を測定対象としているので、温度測定を非常に簡便に実施することができる。
【0022】
上述のボイドの検出方法において、第1閾値との比較でボイドの有無を判断する場合には、第1工程において半導体チップの表面に所定量の熱エネルギーを加えて、第1工程終了時刻から起算して一定時間後に半導体チップの表面温度を測定するという簡易な方法で、ボイドの有無を検出することができる。
【0023】
上述のボイドの検出方法において、レーザ光を用いて熱エネルギーを加える場合には、加える熱エネルギーの量の制御を簡単に行うことができる。
【0024】
上述のボイドの検出方法において、熱源と接触させて半導体装置に熱的刺激を与える場合には、第1工程と第2工程とを並行して実施できるので、第1閾値との比較でボイドの有無を検出する場合に比較して、より短時間でボイドの有無を検出することができる。
【0025】
上述のボイドの検出方法において、高温熱源又は低温熱源を用いる場合には、非常に簡易な装置構成でボイドの有無を検出できる。
【図面の簡単な説明】
【0026】
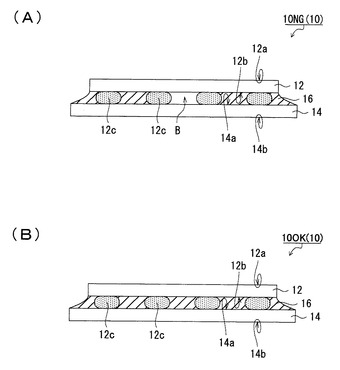
【図1】(A)は、ボイドが存在する半導体装置の概略的な断面構造を示す模式図であり、(B)は、ボイドが存在しない半導体装置の概略的な断面構造を示す模式図である。
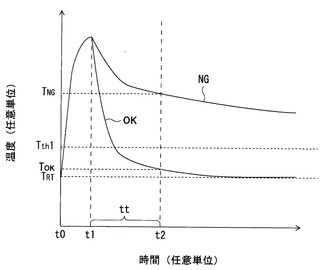
【図2】熱的刺激を加えられたOK品とNG品の表面の温度の経時変化を模式的に示す特性図である。
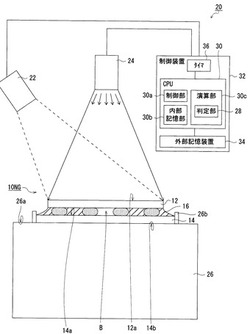
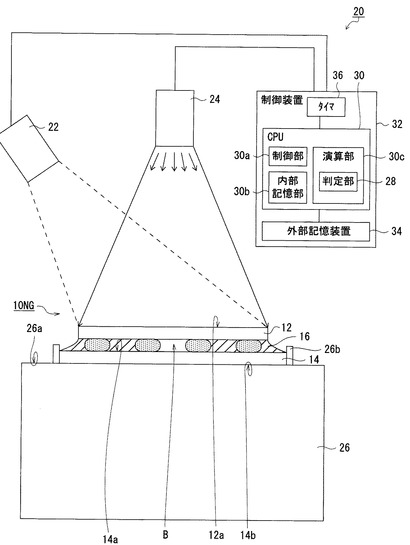
【図3】実施形態1のボイドの検出方法に用いるボイド検出装置の概略構成を示す模式図である。
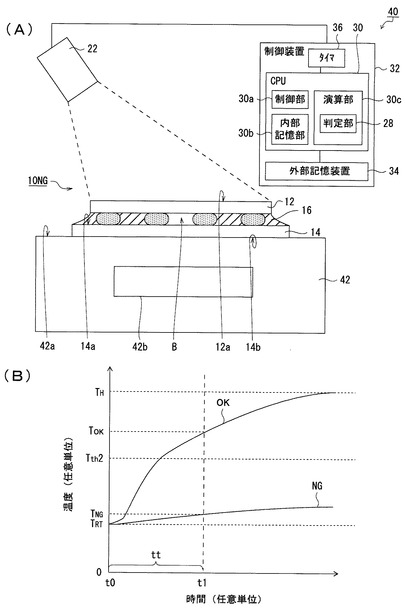
【図4】(A)は、実施形態2のボイドの検出方法に用いるボイド検出装置の概略構成を示す模式図であり、(B)は、実施形態2において熱的刺激を加えられたOK品とNG品の表面の温度の経時変化を模式的に示す特性図である。
【図5】(A)は、実施形態3のボイドの検出方法に用いるボイド検出装置の概略構成を示す模式図であり、(B)は、実施形態3において熱的刺激を加えられたOK品とNG品の表面の温度の経時変化を模式的に示す特性図である。
【発明を実施するための形態】
【0027】
以下、図面を参照して、この発明の実施形態について説明する。なお、各図は、各構成要素の形状、大きさ及び配置関係について、この発明が理解できる程度に概略的に示してある。また、以下、この発明の好適な構成例について説明するが、各構成要素の材質及び数値的条件などは、単なる好適例にすぎない。従って、この発明は、以下の実施形態に何ら限定されない。また、各図において、共通する構成要素には同符号を付し、その説明を省略することもある。
【0028】
(半導体装置について)
まず始めに、この発明における被検査対象である半導体装置について、図面を参照して説明する。図1(A)は、ボイドが存在する半導体装置の概略的な断面構造を示す模式図である。図1(B)は、ボイドが存在しない半導体装置の概略的な断面構造を示す模式図である。
【0029】
図1(A)には、アンダーフィル樹脂16中にボイドBが存在する半導体装置10NG(以降、単に「NG品10NG」と称する。)を示している。図1(B)には、アンダーフィル樹脂16中にボイドBが存在しない半導体装置10OK(以降、単に「OK品10OK」と称する。)を示している。なお、以下の説明で、NG品10NG及びOK品10OKを総称する場合には、単に「半導体装置10」と称する。
【0030】
半導体装置10は、半導体チップ12と基板14とアンダーフィル樹脂16とを備えている。
【0031】
半導体チップ12は、ULSI(Ultra−Large Scale Integration)等の素子をセラミックス等の封止材料で封止したパッケージであり、いわゆるBGA(Ball grid array)部品として構成されている。半導体チップ12は、従来公知のように、ほぼ平行平板状に形成されている。
【0032】
半導体チップ12は、外部に露出する表面12aと、基板14の第1主面14aに臨む裏面12bとを備えている。表面12aと裏面12bとは互いにほぼ平行に延在している。
【0033】
表面12aは、成型された封止材料により、実質的に平面状に形成されている。裏面12bには、はんだ製の微小なバンプ12c,12c,・・・が格子状に配置されている。
【0034】
基板14は、平行平板状の従来公知のプリント基板である。基板14は、第1主面14aと、この第1主面14aに対向する第2主面14bとを備えている。
【0035】
基板14の第1主面14aには、半導体チップ12のバンプ12c,12c,・・・のそれぞれに対応する位置に端子(不図示)が設けられている。これらの端子とバンプ12c,12c,・・・とは互いにはんだ付けされている。その結果、基板14と半導体チップ12とは電気的及び機械的に接続される。
【0036】
アンダーフィル樹脂16は、半導体チップ12及び基板14の間に充填された絶縁性の樹脂材料である。すなわち、アンダーフィル樹脂16は、半導体チップ12の裏面12bと、基板14の第1主面14aとの間の空間を、全てのバンプ12c,12c,・・・を埋め込むように充填している。アンダーフィル樹脂16としては、絶縁性樹脂である従来公知のエポキシ樹脂、アミン系樹脂又はフェノール樹脂を用いることができる。
【0037】
(背景技術)の項で説明したように、アンダーフィル樹脂16を充填する過程で充填不良が発生し、アンダーフィル樹脂16中に気泡としてのボイドBが形成される場合がある。
【0038】
ボイドBには種々の大きさのものが存在するが、発明者らの調査によれば、ボイドBの大きさが、隣接するバンプ12c及び12c間の間隔以上となる場合、つまり、直径が約1mm以上の場合に上述した導通不良の原因となり得ることが明らかとなっている。よって、この発明で「ボイド」とは、隣接するバンプ12c及び12c間の間隔以上の直径のものを意味することとする。
【0039】
図1(A)には、ボイドBが存在するNG品10NGの一例を示している。図1(A)に示す例では、ボイドBは、隣接する2個のバンプ12c及び12cの間の気泡として示されている。一方、図1(B)に示した、OK品10OKの一例では、ボイドBは存在しない。
【0040】
(原理等)
続いて、図1及び図2を参照して、この発明の実施形態のボイドの検出方法の原理とボイド検出の流れとについて説明する。
【0041】
まず始めに、ボイドの検出方法の原理を簡単に説明する。図1(A)に示したボイドBは、空気やアンダーフィル樹脂16由来のガスを含む単なる気泡である。従って、アンダーフィル樹脂16と比較した場合、格段に熱伝導率が小さい。このボイドの検出方法では、ボイドBの熱伝導率がアンダーフィル樹脂16よりも小さいことを利用して、ボイドBの検出を行う。つまり、ボイドBはアンダーフィル樹脂16に比べて熱を伝えにくいことから、加熱又は冷却等の熱的刺激を加えてからの半導体装置10の温度の経時変化、すなわち振る舞いは、ボイドBの有無を反映する。この発明の実施形態では、この原理、すなわち温度変化がボイドの有無に依存することを利用して、アンダーフィル樹脂16中のボイドの有無を検出する。
【0042】
この原理を踏まえた上で、ボイドの検出方法の流れについて簡単に説明する。なお、ボイドの検出方法のより具体的な工程については後述する(実施形態1〜3)の項で説明する。
【0043】
ボイドの検出は、以下の3工程を経て実施される。
【0044】
(第1工程)半導体装置10に熱的刺激を加える工程
(第2工程)熱的刺激を加えてから一定時間経過後の半導体装置10の温度を測定する工程
(第3工程)一定時間経過後の半導体装置10の温度からボイドBの有無を検出する工程
【0045】
第1工程は、アンダーフィル充填工程の終了後に実施され、ほぼ室温に保たれている半導体装置10に対して熱的刺激を加える。具体的には、半導体装置10を加熱又は冷却することにより、半導体装置10の温度を室温(〜20℃)からずらす。
【0046】
アンダーフィル樹脂16にボイドBが存在するNG品10NGの場合、上述した理由によりボイドBの部分で熱伝導が妨げられる。その結果、ボイドBの有無により、加えた熱的刺激に対する温度の応答の様子に違いが生じる。
【0047】
つまり、OK品10OKは、熱伝導率がNG品10NGに比較して大きいために、熱的刺激に対する物理量(温度)の応答速度が速い。それに対して、NG品10NGは、熱伝導率が小さいために、熱的刺激に対する物理量(温度)の応答速度が遅い。
【0048】
第1工程では、外観では区別が付かないOK品10OKとNG品10NGとを判別するために、上述したボイドBの有無により生じる熱伝導率の差を利用する。つまり、測定対象である全ての半導体装置10に対して熱的刺激を加えることで、ボイドBの有無を測定可能な物理量(温度)として顕在化する。なお、以降、半導体装置10の温度を、単に「温度」と称することもある。なお、第1工程における熱的刺激の程度(半導体装置10の温度をどの程度室温からずらすのか)の決定方法については後述する。
【0049】
第2工程では、熱的刺激の開始時刻から起算して一定時間経過後、又は、熱的刺激の終了時刻から起算して一定時間経過後の半導体装置10の温度を測定する。つまり、ボイドBの有無により第1工程において生じた物理量(温度)の違いを、熱的刺激を加えてから一定時間経過後に測定する。なお、熱的刺激を加えてから温度測定を行うまでの待ち時間、すなわち上述の「一定時間」の決定方法については後述する。
【0050】
第3工程では、第2工程で測定された温度を利用してボイドBの有無を検出する。具体的には、熱的刺激を加えてから一定時間を経過した後の温度を、予め定められている閾値と比較して、ボイドBの有無を決定する。なお、第3工程における閾値の決定方法については後述する。
【0051】
本発明では、以上のような3工程を経ることにより、アンダーフィル樹脂16中のボイドBの有無を検出する。
【0052】
ここで、図2を参照して、上述のボイド検出の流れをより具体的に説明する。図2は、熱的刺激が加えられたOK品10OKとNG品10NGの表面12aの温度の経時変化を模式的に示す特性図である。
【0053】
図2の縦軸は温度(任意単位)を示し、及び横軸は時間(任意単位)を示す。図2には、2本の曲線OK及びNGが描かれており、それぞれOK品10OKの温度変化と、NG品10NGの温度変化に対応する。
【0054】
図2において、時刻t0からt1の間が第1工程に対応し、この間に、半導体装置10に、表面12a側から所定量の熱エネルギーが加えられる。その結果、OK品10OK及びNG品10NGともに、表面12aの温度が室温TRTから上昇する。
【0055】
第1工程が終了して表面12aへの熱エネルギーの供給が止まると、半導体装置10の表面12aの温度は徐々に低下していく。上述のようにOK品10OKと、NG品10NGとでは、この温度低下速度に違いが生じる。すなわち、曲線OKに示すように、OK品10OKは、速やかに温度が減少し、熱的刺激が加えられる前の温度である室温TRTに至る。しかし、曲線NGに示すように、ボイドBが存在するNG品10NGは、ボイドB部分での熱伝導率が小さいために、OK品10OKよりも温度低下速度が遅くなる。
【0056】
よって、第1工程の終了時刻t1から一定時間tt経過後の時刻t2において半導体装置10の表面12aの温度を測定する第2工程を行うことで、OK品10OKとNG品10NGの表面12aの温度の違いを検出することができる。
【0057】
ここで、第2工程において測定されたOK品10OKの表面12aの温度をTOKとし、NG品10NGの表面12aの温度をTNGとする。このとき、両温度には、TNG>TOKなる関係が成り立っている。
【0058】
第3工程では、予め定めておいたTNG>Tth1>TOKなる関係を有する閾値Tth1とTNG及びTOKとを比較することでボイドBの有無を検出する。すなわち半導体装置10の表面12aの温度が閾値Tth1よりも高い場合には、NG品10NGであると判定し、表面12aの温度が閾値Tth1以下の場合には、OK品10OKであると判定する。
【0059】
(熱的刺激の程度、一定時間及び閾値の決定方法)
(1)第1工程における熱的刺激の程度、(2)第2工程における一定時間、及び(3)第3工程における閾値は、互いに関係しあっており、それぞれを独立して決定することは難しい。そのため、これらの値は、事前に行われる予備実験を通じてボイドBの検出率が最も高くなるように決定することが好ましい。
【0060】
以下、この予備実験の一例について詳細に説明する。
【0061】
まず始めに、この実施形態とは異なる方法(例えば、超音波探傷法)でボイドBの有無を判別したOK品10OKとNG品10NGとを、テストサンプルとして予め多数、準備する。以降、テストサンプルのOK品を、「OKテスト品」と称する。また、テストサンプルのNG品を、「NGテスト品」と称する。
【0062】
次に、これらのOKテスト品及びNGテスト品のそれぞれに対して、共通した熱的刺激を加えるとともに、OKテスト品及びNGテスト品の温度の経時変化を測定する。そして、熱的刺激の程度を、例えば、10℃ずつ変化させながら、温度の経時変化測定を繰り返す。これにより、図2の如くの特性図をテストサンプルごとに得る。
【0063】
このようにして得られた温度の経時変化をOKテスト品とNGテスト品との間で比較する。そして、温度測定に伴う誤差を考慮しても、OKテスト品とNGテスト品とが区別可能な温度差を示すように、熱的刺激の程度と「一定時間」とを決定する。同様に、OKテスト品の示す温度と、NGテスト品の示す温度との間の温度に閾値を決定する。
【0064】
(実施形態1)
図2及び図3を参照して、実施形態1のボイドの検出方法について説明する。図3は、ボイドの検出方法に用いるボイド検出装置(以下、単に「検出装置」と称する。)の概略構成を示す模式図である。
【0065】
検出装置20は、赤外線放射温度計22と、レーザ光源24と、ステージ26と、判定部28とを備えている。
【0066】
ステージ26は平面状の載置面26aを備えている。この載置面26aには、載置面26aから突出した突起としての位置決め部品26bが設けられている。この位置決め部品26bに基板14の側面を当接させることで、載置面26a上において半導体装置10の位置決めを行う。
【0067】
レーザ光源24は、位置決めされた半導体装置10の表面12aの全面に向けて、一定出力のレーザ光を一定時間照射するように構成されている。レーザ光源24は、半導体装置10の表面12aとの間の距離が変化しないように、検出装置20の本体に固定されている。レーザ光源24としては、従来公知のものの中から設計に応じて好適なものを選択できるが、例えば、YAGレーザやCO2レーザを好適に用いることができる。
【0068】
赤外線放射温度計22(以下、単に「赤外線温度計22」と称する。)は、物体から放射される赤外線の強度を測定して、物体の温度を測定する温度計である。この実施形態においては、赤外線温度計22は、半導体装置10の表面12aの全面から放射される赤外線を検出するように配置されている。従って、赤外線温度計22が測定する温度は、半導体装置10の表面12aの平均温度である。
【0069】
判定部28は、CPU(Central Processing Unit)30を備えた制御装置32により達成される機能手段であり、赤外線温度計22で測定された表面12aの平均温度TAVを、外部記憶装置34に予め記憶されている第1閾値Tth1と比較することにより、ボイドBの有無の判定を行う。
【0070】
ここで、制御装置32の構成について簡単に説明する。制御装置32は、従来公知のCPU30と外部記憶装置34とタイマ36とで主に構成されている。
【0071】
ここで、CPU30は、制御部30aと、内部記憶部30bと、演算部30cとを備えている。CPU30は、データバスにより、外部記憶装置34に接続されており、これらは例えば一台のコンピュータ(図示せず)を構成していて、図示されないが、キーボードやマウス等の入力手段、ディスプレイ等の表示手段、及びプリンタ等の出力手段を備えている。
【0072】
制御部30aは、外部記憶装置34から読み込まれたアプリケーションプログラムにしたがって、検出装置20の構成要素の個別動作及び協働動作を制御する。
【0073】
内部記憶部30bは、CPU30の動作時に発生した情報などを一時的に格納する。演算部30cは、アプリケーションプログラムの実行などのCPU30の動作に当たり、各種の機能手段として作用する。この機能手段としては、判定部28や、レーザ光源24と赤外線温度計22とを協働して制御する機能手段などが存在している。
【0074】
制御装置32を構成する外部記憶装置34は、従来公知のハードディスクドライブや、ROM(Read only memory)として構成されている。上述のように、外部記憶装置34には、判定部28によるボイドBの有無の判定基準温度としての第1閾値Tth1と、ボイドBの有無の判定に用いるボイド判定式などが記憶されている。
【0075】
次に、図2及び図3を参照して、この実施形態のボイドの検出方法を、上述した第1〜第3工程に従って、より詳細に説明する。
【0076】
(第1工程)
図2を参照すると、時刻t0〜t1の間に行われる第1工程においては、制御装置32からの指令に従って、レーザ光源24から、半導体チップ12の表面12aの全面に向けて所定の出力のレーザ光を、所定時間(t0〜t1)にわたって照射する。つまり半導体装置10に熱的刺激を加える。これにより、半導体チップ12の表面12aには、出力と照射時間との積で与えられる所定量の熱エネルギーが加えられる。
【0077】
なお、レーザ光の加熱条件、すなわちレーザ出力及び照射時間は、半導体チップ12の表面12aの全面が「室温+40℃」以上の平均温度TAVとなるような条件に設定することが好ましい。つまり、室温を約20℃とした場合には、表面12aが60℃以上の平均温度TAVとなるまで加熱することが好ましい。このような条件で半導体チップ12の加熱を行うことで、加熱終了後の半導体チップ12の表面12aの温度減少がボイドBの有無を反映し易くなる。
【0078】
(第2工程)
第2工程においては、第1工程の終了時刻から起算して一定時間tt後(例えば、30秒後)の時刻t2に半導体チップ12の表面12aの平均温度TAVを赤外線温度計22により測定する。つまり、レーザ光の照射が終了した時刻を起算時刻として、一定時間tt後の表面12aの平均温度TAVを測定する。
【0079】
より詳細には、制御装置32は、レーザ光源24からのレーザ光の照射終了をキーとして、タイマ36を作動させる。そして、このタイマ36から一定時間ttが経過した旨の指令を受けると、制御装置32は赤外線温度計22をONにして、半導体チップ12の表面12aの平均温度TAVを測定する。
【0080】
このようにして測定された平均温度TAVは、制御装置32を経由して外部記憶装置34に読み出し自在に一時的に記憶される。
【0081】
(第3工程)
第3工程においては、判定部28は、外部記憶装置34に対して、平均温度TAV、第1閾値Tth1、及びボイド判定式を判定部28に向けて出力する指令を送信する。この指令を受けた外部記憶装置34は、判定部28へ平均温度TAV、第1閾値Tth1及びボイド判定式を出力する。
【0082】
判定部28は、読み出されたボイド判定式に平均温度TAV及び第1閾値Tth1を代入し、得られた結果からボイドBの有無を判定する。具体的には、判定部28は、(平均温度−第1閾値)なるボイド判定式に平均温度TAV及び第1閾値Tth1を代入し、(TAV−Tth1)なる計算を行う。そして、この結果が0(ゼロ)より大きければ、ボイドBが存在する、すなわちNG品10NGであると判定し、0(ゼロ)以下であれば、ボイドBが存在しない、すなわちOK品10OKであると判定する。
【0083】
このようにして得られた判定結果は、制御装置32を経由して、ディスプレイ等の表示装置に表示される。
【0084】
以上説明したように、この実施形態のボイドの検出方法は、熱的刺激を加えてから一定時間経過後の半導体チップ12の表面12aの温度を測定し、得られた温度を第1閾値Tth1と比較して、ボイドBの有無を検出する。従って、この実施形態のボイドの検出方法によれば、アンダーフィル充填条件を変更することがないとともに、半導体装置10の電気的ショートを引き起こす虞なくボイドを検出することが可能となる。
【0085】
なお、この実施形態においては、表面12aの温度を評価するために赤外線温度計22を用いていたが、例えば、サーモグラフィー装置を温度評価に用いてもよい。このようにすることにより、半導体チップ12の表面12aの温度分布を2次元画像として得ることができ、ボイドの位置を特定することが可能となるとともに、ボイドの検出精度を向上させることができる。
【0086】
(実施形態2)
図4(A)及び(B)を参照して、実施形態2のボイドの検出方法について説明する。図4(A)は、ボイドの検出方法に用いる検出装置の概略構成を示す模式図である。図4(B)は、実施形態2において熱的刺激を加えられたOK品10OKとNG品10NGの表面12aの温度の経時変化を模式的に示す特性図である。
【0087】
なお、図4(A)において、図1及び図3と同様の構成要素には同符号を付してその説明を省略する。
【0088】
検出装置40は、赤外線放射温度計22と、高温熱源42と、判定部28とを備えている。
【0089】
高温熱源42は、室温よりも高温で温度が一定に保たれた熱源であり、半導体装置10を載置するステージを兼ねている。より詳細には、高温熱源42は、載置面42aと、温度維持装置42bとを備えている。ここで、高温熱源42の温度をTHとする。
【0090】
載置面42aは平面状に形成されている。この載置面42aに、温度が室温程度の半導体装置10が載置されることにより、半導体装置10に対して熱的刺激が加えられる。より詳細には、半導体装置10が載置面42aに載置されることにより、載置面42aと基板14の第2主面14bとが接触する。その結果、高温熱源42からの熱エネルギーが載置面42a及び基板14の第2主面14bを介して、半導体装置10へと加えられる。
【0091】
温度維持装置42bは、高温熱源42の温度THを一定に保つ機能を有しており、加熱装置と加熱装置を制御するサーミスタ等の制御装置とからなる従来公知の恒温装置である。
【0092】
なお、高温熱源42の温度THは、実施形態1で説明したと同様の理由により、室温よりも40℃以上高い温度とすることが好ましい。
【0093】
また、高温熱源42の熱容量は、半導体装置10との接触によっても温度THが実質的に一定に保たれる程度の大きさとすることが好ましい。
【0094】
次に、図4(A)及び(B)を参照して、この実施形態のボイドの検出方法を、第1〜第3工程に従って、より詳細に説明する。
【0095】
図4(B)の縦軸は温度(任意単位)を示し、及び横軸は時間(任意単位)を示す。図4(B)には、2本の曲線OK及びNGが描かれており、それぞれOK品10OKの温度変化と、NG品10NGの温度変化に対応する。
【0096】
(第1工程)
第1工程においては、基板14の第1主面14aに対向する第2主面14bに高温熱源42を接触させる。
【0097】
図4(B)を参照すると、時刻t0において高温熱源42を第2主面14bに接触させることにより、高温熱源42から半導体装置10に対して熱が供給される。半導体装置10に供給された熱は、基板14の第2主面14b側から、半導体チップ12の表面12aへと伝導して行き、表面12aの温度を徐々に上昇させる。
【0098】
その結果、図4(B)に示すように、OK品10OKの温度は、室温TRTから速やかに上昇して行き、やがて高温熱源42の温度THとほぼ等しい温度に達して平衡に至る。それに対して、上述のようにアンダーフィル樹脂16中にボイドBが存在すると、ボイドBの部分において熱伝導速度が低下するので、単位時間当たりに表面12aに到達する熱量が低下する。その結果、図4(B)に示すように、ボイドBが存在するNG品10NGは、OK品10OKに比較して、表面12aの温度上昇の速度が遅くなる。
【0099】
従って、第1工程の開始時刻t0から起算して一定時間tt後に表面12aの温度を測定する第2工程を行うと、OK品10OKとNG品10NGの表面12aの温度に違いが生じる。第2工程において測定されたOK品10OKの表面12aの温度をTOKとし、NG品10NGの表面12aの温度をTNGとすると、両温度には、TNG<TOKなる関係が成り立つ。
【0100】
従って、TNGとTOKとの間の温度に第2閾値Tth2が設定されていれば、OK品10OKとNG品10NGとを判別することができる。つまり、ボイドBの有無を検出することができる。
【0101】
(第2工程)
第2工程は、高温熱源42が第2主面14bに接触した状態で行われ、第1工程の開始時刻t0から起算して一定時間tt後の時刻t1に、表面12aの平均温度TAVを赤外線温度計22により測定する。すなわち、この実施形態においては、第2工程は、第1工程と並行して実施される。
【0102】
より詳細には、制御装置32は、半導体装置10が載置面42aに載置されたことをキーとして、タイマ36を作動させる。そして、このタイマ36から一定時間ttが経過した旨の指令を受けると、制御装置32は赤外線温度計22をONにして、半導体チップ12の表面12aの平均温度TAVを測定する。
【0103】
このようにして測定された平均温度TAVは、制御装置32を経由して外部記憶装置34に読み出し自在に一時的に記憶される。
【0104】
(第3工程)
第3工程においては、判定部28は、外部記憶装置34に対して、平均温度TAV、第2閾値Tth2、及びボイド判定式を判定部28に向けて出力する指令を送信する。この指令を受けた外部記憶装置34は、判定部28へ平均温度TAV、第2閾値Tth2及びボイド判定式を出力する。
【0105】
判定部28は、読み出されたボイド判定式に平均温度TAV及び第2閾値Tth2を代入し、得られた結果からボイドの有無を判定する。具体的には、判定部28は、(平均温度−第2閾値)なるボイド判定式に平均温度TAV及び第2閾値Tth2を代入し、(TAV−Tth2)なる計算を行う。そして、この結果が0(ゼロ)以下であれば、ボイドBが存在する、すなわちNG品10NGであると判定し、0より大きければ、ボイドBが存在しない、すなわちOK品10OKであると判定する。
【0106】
なお、第2閾値Tth2は、(熱的刺激の程度、一定時間及び閾値の決定方法)の項で説明したと同様の方法で予め決定しておく。
【0107】
このようにして得られた判定結果は、制御装置32を経由して、ディスプレイ等の表示装置に出力される。
【0108】
以上説明したように、この実施形態のボイドの検出方法は、熱的刺激を加えてから一定時間経過後の半導体チップ12の表面12aの温度を測定し、得られた温度を第2閾値Tth2と比較して、ボイドBの有無を検出する。従って、この実施形態のボイドの検出方法によれば、アンダーフィル充填条件を変更することがないとともに、半導体装置10の電気的ショートを引き起こす虞なくボイドを検出することが可能となる。
【0109】
また、第1工程と第2工程とを並行して実施するので、実施形態1に比較して、より迅速にボイドBを検出することができる。
【0110】
(実施形態3)
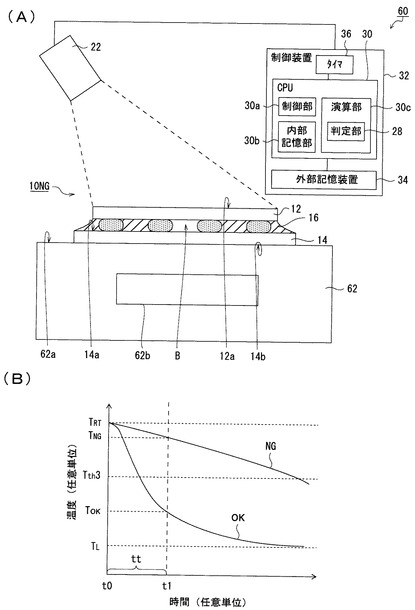
図5(A)及び(B)を参照して、実施形態3のボイドの検出方法について説明する。図5(A)は、ボイドの検出方法に用いる検出装置の概略構成を示す模式図である。図5(B)は、実施形態3において熱的刺激を加えられたOK品10OKとNG品10NGの表面12aの温度の経時変化を模式的に示す特性図である。
【0111】
なお、図5(A)において、図1、図3及び図4(A)と同様の構成要素には同符号を付してその説明を省略する。
【0112】
実施形態3の検出装置60は、熱源が室温よりも低温の低温熱源である点を除いて、実施形態2の検出装置40と同様に構成されている。従って、実施形態2との重複説明を極力避け、主に相違点について説明する。
【0113】
検出装置60は、赤外線放射温度計22と、低温熱源62と、判定部28とを備えている。
【0114】
低温熱源62は、室温よりも低温で温度が一定に保たれた熱源であり、半導体装置10を載置するステージを兼ねている。より詳細には、低温熱源62は、載置面62aと、温度維持装置62bとを備えている。ここで、低温熱源62の温度をTLとする。
【0115】
載置面62aは平面状に形成されている。この載置面62aに、温度が室温程度の半導体装置10が載置されることにより、半導体装置10に対して熱的刺激が加えられる。より詳細には、半導体装置10が載置面62aに載置されることにより、載置面62aと基板14の第2主面14bとが接触する。その結果、熱エネルギーが半導体装置10から載置面62a及び基板14の第2主面14bを介して、低温熱源62へと移動する。
【0116】
温度維持装置62bは、低温熱源62の温度TLを一定に保つ機能を有しており、冷却装置と冷却装置を制御するサーミスタ等の制御装置とからなる従来公知の恒温装置である。
【0117】
なお、低温熱源62の温度TLは、室温よりも40℃以上低い温度とすることが好ましい。低温熱源62の温度をこのような温度TLとすることにより、第2主面14bとの接触中における半導体チップ12の表面12aの温度低下がボイドBの有無を反映し易くなる。
【0118】
また、低温熱源62の熱容量は、半導体装置10との接触によっても温度TLが実質的に一定に保たれる程度の大きさとすることが好ましい。
【0119】
次に、図5(A)及び(B)を参照して、この実施形態のボイドの検出方法を、第1〜第3工程に従って、より詳細に説明する。
【0120】
図5(B)の縦軸は温度(任意単位)を示し、及び横軸は時間(任意単位)を示す。図5(B)には、2本の曲線OK及びNGが描かれており、それぞれOK品10OKの温度変化と、NG品10NGの温度変化に対応する。
【0121】
(第1工程)
第1工程においては、基板14の第1主面14aに対向する第2主面14bに低温熱源62を接触させる。
【0122】
図5(B)を参照すると、時刻t0において低温熱源62を第2主面14bに接触させることにより、低温熱源62へと半導体装置10から熱が奪われる。半導体装置10から熱が奪われることにより、表面12aの温度は徐々に低下していく。
【0123】
その結果、図5(B)に示すように、OK品10OKの温度は、室温TRTから速やかに低下して行き、やがて低温熱源62の温度TLとほぼ等しい温度に達して平衡に至る。それに対し、上述のようにアンダーフィル樹脂16中にボイドBが存在すると、ボイドBの部分において熱伝導速度が低下するので、単位時間当たりに表面12aから奪われる熱量が低下する。その結果、図5(B)に示すように、ボイドBが存在するNG品10NGは、OK品10OKに比較して、表面12aの温度低下の速度が遅くなる。
【0124】
従って、第1工程の開始時刻t0から起算して一定時間tt後に表面12aの温度を測定する第2工程を行うと、OK品10OKとNG品10NGの表面12aの温度に違いが生じる。第2工程において測定されたOK品10OKの表面12aの温度をTOKとし、NG品10NGの表面12aの温度をTNGとすると、両温度には、TNG>TOKなる関係が成り立つ。
【0125】
従って、TNGとTOKとの間の温度に第3閾値Tth3を設定すれば、OK品10OKとNG品10NGとを判別することができる。つまり、ボイドBの有無を検出することができる。
【0126】
(第2工程)
第2工程は、低温熱源62が第2主面14bに接触した状態で行われ、第1工程の開始時刻t0から起算して一定時間tt後の時刻t1に、表面12aの平均温度TAVを赤外線温度計22により測定する。すなわち、この実施形態においては、第2工程は、第1工程と並行して実施される。
【0127】
より詳細には、制御装置32は、半導体装置10が載置面62aに載置されたことをキーとして、タイマ36を作動させる。そして、このタイマ36から一定時間ttが経過した旨の指令を受けると、制御装置32は赤外線温度計22をONにして、半導体チップ12の表面12aの平均温度TAVを測定する。
【0128】
このようにして測定された平均温度TAVは、制御装置32を経由して外部記憶装置34に読み出し自在に一時的に記憶される。
【0129】
(第3工程)
第3工程においては、判定部28は、外部記憶装置34に対して、平均温度TAV、第3閾値Tth3、及びボイド判定式を判定部28に向けて出力する指令を送信する。この指令を受けた外部記憶装置34は、判定部28へ平均温度TAV、第3閾値Tth3及びボイド判定式を出力する。
【0130】
判定部28は、読み出されたボイド判定式に平均温度TAV及び第3閾値Tth3を代入し、得られた結果からボイドの有無を判定する。具体的には、判定部28は、(平均温度−第3閾値)なるボイド判定式に平均温度TAV及び第3閾値Tth3を代入し、(TAV−Tth3)なる計算を行う。そして、この結果が0(ゼロ)より大きければ、ボイドBが存在する、すなわちNG品10NGであると判定し、0(ゼロ)以下であれば、ボイドBが存在しない、すなわちOK品10OKであると判定する。なお、第3閾値Tth3は、(熱的刺激の程度、一定時間及び閾値の決定方法)の項で説明したと同様の方法で予め決定しておく。
【0131】
このようにして得られた判定結果は、制御装置32を経由して、ディスプレイ等の表示装置に出力される。
【0132】
以上説明したように、この実施形態のボイドの検出方法によれば、アンダーフィル充填条件を変更することがないとともに、半導体装置10の電気的ショートを引き起こす虞なくボイドを検出することが可能となる。
【0133】
また、第1工程と第2工程とを並行して実施するので、実施形態1に比較して、より迅速にボイドBを検出することができる。
【符号の説明】
【0134】
10 半導体装置
10OK OK品
10NG NG品
12 半導体チップ
12a 表面
12b 裏面
12c バンプ
14 基板
14a 第1主面
14b 第2主面
16 アンダーフィル樹脂
20,40,60 ボイド検出装置(検出装置)
22 赤外線放射温度計(赤外線温度計)
24 レーザ光源
26 ステージ
26a,42a,62a 載置面
26b 位置決め部品
28 判定部
30 CPU
30a 制御部
30b 内部記憶部
30c 演算部
32 制御装置
34 外部記憶装置
36 タイマ
42 高温熱源
42b,62b 温度維持装置
62 低温熱源
【技術分野】
【0001】
この発明は、半導体チップと、半導体チップが実装される基板との間を充填するアンダーフィル樹脂中に存在するボイドの検出方法に関する。
【背景技術】
【0002】
近年、電子機器の小型化、軽量化、及び高機能化が進んでおり、それに伴い半導体チップを基板に直接接続して半導体装置を製造するフリップチップ実装が広く普及し始めている。それは、フリップチップ実装では実装面積を小さくできるとともに、配線長を短くできることから、半導体装置の電気的特性が改善されることによる。
【0003】
一般に、フリップチップ実装においては、半導体チップと基板とのはんだ付けなどの接合工程の後に、アンダーフィル充填工程が実施される。ハンダ導体チップ接合工程後に、接合継手箇所が度重なる加熱及び冷却を受けると、半導体チップと基板とでは熱膨張係数が大きく異なっているために、接合継手箇所で応力の集中と分散とが繰り返される。
【0004】
その結果、最悪の場合接合継手箇所が破断して導通不良が引き起こされる。これを防止するためにアンダーフィル充填が必要とされ、半導体チップと基板との間には、アンダーフィル樹脂と呼ばれる絶縁樹脂が充填される。このように、アンダーフィル充填は、半導体チップと基板との接合継手箇所への応力集中を防ぐために実施される。
【0005】
ところで、アンダーフィル充填工程においては充填不良が発生することがある。つまり、基板と半導体チップとの間を完全に充填すべきアンダーフィル樹脂にボイド(気泡)が発生する場合がある。アンダーフィル樹脂中にボイドが発生すると、ボイド内に位置する接合継手箇所で上述した応力の集中・分散が繰り返されるために、導通不良の原因となる。
【0006】
アンダーフィル樹脂中におけるボイドの検出に関しては、絶縁樹脂で被覆した金属粒を混合したアンダーフィル樹脂を用い、充填工程終了後にX線観察によりボイドの有無を検出する技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−250590号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に開示された技術では、たとえ絶縁樹脂で被覆されているとは言え、アンダーフィル樹脂に金属粒を混合するために、半導体装置の電気的なショートを引き起こす虞があった。
【0009】
また、金属粒が混合されたアンダーフィル樹脂は、充填工程時の流動特性が金属粒を含まないアンダーフィル樹脂と異なっている。そのため、金属粒が混合されたアンダーフィル樹脂を用いて充填を行う場合、アンダーフィル充填工程の諸条件を見直す必要があった。
【0010】
この出願に係る発明者は鋭意検討の結果、アンダーフィル充填工程終了後の半導体装置に対して熱的刺激を加えたときの当該半導体装置の温度の振る舞いが当該半導体装置に含まれるボイドに依存することを知見し、従って、この熱的刺激に対する応答としての半導体装置の温度を測定することにより上述した課題を解決できることに想到した。
【0011】
従って、この発明の目的は、アンダーフィル充填条件を変更することがないとともに、半導体装置の電気的ショートを引き起こす虞のない、アンダーフィル樹脂中のボイドの検出方法を提供することにある。
【課題を解決するための手段】
【0012】
上述した目的の達成を図るために、この発明のボイドの検出方法は、基板と、基板の第1主面側に裏面を臨ませて実装された半導体チップと、半導体チップ及び基板の間に充填されたアンダーフィル樹脂とを備えた半導体装置においてアンダーフィル樹脂中のボイドを検出するに当たって、以下の3工程を実施する。
【0013】
第1工程:半導体装置に対して熱的刺激を加える
第2工程:熱的刺激を加えてから一定時間経過後の半導体装置の温度を測定する
第3工程:半導体装置の温度からボイドの有無を検出する
【0014】
上述のボイドの検出方法の好ましい実施態様によれば、第2工程が、半導体チップの裏面に対向する表面の温度を測定する工程であるのがよい。
【0015】
上述のボイドの検出方法の別の好ましい実施態様によれば、第1工程が、半導体チップの表面に所定量の熱エネルギーを加える工程であり、第2工程が、第1工程の終了時刻から起算して一定時間後に表面の温度を測定する工程であり、第3工程が、表面の温度が第1閾値よりも高い場合にボイドが存在すると判断し、及び第1閾値以下の場合にボイドが存在しないと判断する工程であるのがよい。
【0016】
この場合において、好ましくは、第1工程が、表面に向けて一定出力のレーザ光を一定時間にわたり照射する工程であるのがよい。
【0017】
上述のボイドの検出方法のまた別の好ましい実施態様によれば、第1工程が、基板の第1主面に対向する第2主面に一定温度の熱源を接触させる工程であり、第2工程が、熱源が第2主面に接触した状態で行われ、第1工程の開始時刻から起算して一定時間後に半導体チップの表面の温度を測定する工程であるのがよい。
【0018】
この場合において、好ましくは、熱源が室温よりも温度が高い高温熱源であり、第3工程が、表面の温度が第2閾値よりも高い場合にボイドが存在しないと判断し、及び第2閾値以下の場合にボイドが存在すると判断する工程であるのがよい。
【0019】
この場合において、熱源が室温よりも温度が低い低温熱源であり、第3工程が、表面の温度が第3閾値よりも高い場合にボイドが存在すると判断し、及び第3閾値以下の場合にボイドが存在しないと判断する工程であるのがよい。
【発明の効果】
【0020】
この発明のボイドの検出方法では、「熱的刺激を加えてから一定時間経過後の半導体装置の温度を測定する」という簡易な方法で、アンダーフィル樹脂中のボイドの有無を検出することができる。その結果、この発明では、アンダーフィル充填条件を変更する必要がなく、さらに、半導体装置の電気的ショートを引き起こす虞もない。
【0021】
上述のボイドの検出方法において、半導体チップの表面の温度を測定する場合には、外部に露出しているチップ表面の温度を測定対象としているので、温度測定を非常に簡便に実施することができる。
【0022】
上述のボイドの検出方法において、第1閾値との比較でボイドの有無を判断する場合には、第1工程において半導体チップの表面に所定量の熱エネルギーを加えて、第1工程終了時刻から起算して一定時間後に半導体チップの表面温度を測定するという簡易な方法で、ボイドの有無を検出することができる。
【0023】
上述のボイドの検出方法において、レーザ光を用いて熱エネルギーを加える場合には、加える熱エネルギーの量の制御を簡単に行うことができる。
【0024】
上述のボイドの検出方法において、熱源と接触させて半導体装置に熱的刺激を与える場合には、第1工程と第2工程とを並行して実施できるので、第1閾値との比較でボイドの有無を検出する場合に比較して、より短時間でボイドの有無を検出することができる。
【0025】
上述のボイドの検出方法において、高温熱源又は低温熱源を用いる場合には、非常に簡易な装置構成でボイドの有無を検出できる。
【図面の簡単な説明】
【0026】
【図1】(A)は、ボイドが存在する半導体装置の概略的な断面構造を示す模式図であり、(B)は、ボイドが存在しない半導体装置の概略的な断面構造を示す模式図である。
【図2】熱的刺激を加えられたOK品とNG品の表面の温度の経時変化を模式的に示す特性図である。
【図3】実施形態1のボイドの検出方法に用いるボイド検出装置の概略構成を示す模式図である。
【図4】(A)は、実施形態2のボイドの検出方法に用いるボイド検出装置の概略構成を示す模式図であり、(B)は、実施形態2において熱的刺激を加えられたOK品とNG品の表面の温度の経時変化を模式的に示す特性図である。
【図5】(A)は、実施形態3のボイドの検出方法に用いるボイド検出装置の概略構成を示す模式図であり、(B)は、実施形態3において熱的刺激を加えられたOK品とNG品の表面の温度の経時変化を模式的に示す特性図である。
【発明を実施するための形態】
【0027】
以下、図面を参照して、この発明の実施形態について説明する。なお、各図は、各構成要素の形状、大きさ及び配置関係について、この発明が理解できる程度に概略的に示してある。また、以下、この発明の好適な構成例について説明するが、各構成要素の材質及び数値的条件などは、単なる好適例にすぎない。従って、この発明は、以下の実施形態に何ら限定されない。また、各図において、共通する構成要素には同符号を付し、その説明を省略することもある。
【0028】
(半導体装置について)
まず始めに、この発明における被検査対象である半導体装置について、図面を参照して説明する。図1(A)は、ボイドが存在する半導体装置の概略的な断面構造を示す模式図である。図1(B)は、ボイドが存在しない半導体装置の概略的な断面構造を示す模式図である。
【0029】
図1(A)には、アンダーフィル樹脂16中にボイドBが存在する半導体装置10NG(以降、単に「NG品10NG」と称する。)を示している。図1(B)には、アンダーフィル樹脂16中にボイドBが存在しない半導体装置10OK(以降、単に「OK品10OK」と称する。)を示している。なお、以下の説明で、NG品10NG及びOK品10OKを総称する場合には、単に「半導体装置10」と称する。
【0030】
半導体装置10は、半導体チップ12と基板14とアンダーフィル樹脂16とを備えている。
【0031】
半導体チップ12は、ULSI(Ultra−Large Scale Integration)等の素子をセラミックス等の封止材料で封止したパッケージであり、いわゆるBGA(Ball grid array)部品として構成されている。半導体チップ12は、従来公知のように、ほぼ平行平板状に形成されている。
【0032】
半導体チップ12は、外部に露出する表面12aと、基板14の第1主面14aに臨む裏面12bとを備えている。表面12aと裏面12bとは互いにほぼ平行に延在している。
【0033】
表面12aは、成型された封止材料により、実質的に平面状に形成されている。裏面12bには、はんだ製の微小なバンプ12c,12c,・・・が格子状に配置されている。
【0034】
基板14は、平行平板状の従来公知のプリント基板である。基板14は、第1主面14aと、この第1主面14aに対向する第2主面14bとを備えている。
【0035】
基板14の第1主面14aには、半導体チップ12のバンプ12c,12c,・・・のそれぞれに対応する位置に端子(不図示)が設けられている。これらの端子とバンプ12c,12c,・・・とは互いにはんだ付けされている。その結果、基板14と半導体チップ12とは電気的及び機械的に接続される。
【0036】
アンダーフィル樹脂16は、半導体チップ12及び基板14の間に充填された絶縁性の樹脂材料である。すなわち、アンダーフィル樹脂16は、半導体チップ12の裏面12bと、基板14の第1主面14aとの間の空間を、全てのバンプ12c,12c,・・・を埋め込むように充填している。アンダーフィル樹脂16としては、絶縁性樹脂である従来公知のエポキシ樹脂、アミン系樹脂又はフェノール樹脂を用いることができる。
【0037】
(背景技術)の項で説明したように、アンダーフィル樹脂16を充填する過程で充填不良が発生し、アンダーフィル樹脂16中に気泡としてのボイドBが形成される場合がある。
【0038】
ボイドBには種々の大きさのものが存在するが、発明者らの調査によれば、ボイドBの大きさが、隣接するバンプ12c及び12c間の間隔以上となる場合、つまり、直径が約1mm以上の場合に上述した導通不良の原因となり得ることが明らかとなっている。よって、この発明で「ボイド」とは、隣接するバンプ12c及び12c間の間隔以上の直径のものを意味することとする。
【0039】
図1(A)には、ボイドBが存在するNG品10NGの一例を示している。図1(A)に示す例では、ボイドBは、隣接する2個のバンプ12c及び12cの間の気泡として示されている。一方、図1(B)に示した、OK品10OKの一例では、ボイドBは存在しない。
【0040】
(原理等)
続いて、図1及び図2を参照して、この発明の実施形態のボイドの検出方法の原理とボイド検出の流れとについて説明する。
【0041】
まず始めに、ボイドの検出方法の原理を簡単に説明する。図1(A)に示したボイドBは、空気やアンダーフィル樹脂16由来のガスを含む単なる気泡である。従って、アンダーフィル樹脂16と比較した場合、格段に熱伝導率が小さい。このボイドの検出方法では、ボイドBの熱伝導率がアンダーフィル樹脂16よりも小さいことを利用して、ボイドBの検出を行う。つまり、ボイドBはアンダーフィル樹脂16に比べて熱を伝えにくいことから、加熱又は冷却等の熱的刺激を加えてからの半導体装置10の温度の経時変化、すなわち振る舞いは、ボイドBの有無を反映する。この発明の実施形態では、この原理、すなわち温度変化がボイドの有無に依存することを利用して、アンダーフィル樹脂16中のボイドの有無を検出する。
【0042】
この原理を踏まえた上で、ボイドの検出方法の流れについて簡単に説明する。なお、ボイドの検出方法のより具体的な工程については後述する(実施形態1〜3)の項で説明する。
【0043】
ボイドの検出は、以下の3工程を経て実施される。
【0044】
(第1工程)半導体装置10に熱的刺激を加える工程
(第2工程)熱的刺激を加えてから一定時間経過後の半導体装置10の温度を測定する工程
(第3工程)一定時間経過後の半導体装置10の温度からボイドBの有無を検出する工程
【0045】
第1工程は、アンダーフィル充填工程の終了後に実施され、ほぼ室温に保たれている半導体装置10に対して熱的刺激を加える。具体的には、半導体装置10を加熱又は冷却することにより、半導体装置10の温度を室温(〜20℃)からずらす。
【0046】
アンダーフィル樹脂16にボイドBが存在するNG品10NGの場合、上述した理由によりボイドBの部分で熱伝導が妨げられる。その結果、ボイドBの有無により、加えた熱的刺激に対する温度の応答の様子に違いが生じる。
【0047】
つまり、OK品10OKは、熱伝導率がNG品10NGに比較して大きいために、熱的刺激に対する物理量(温度)の応答速度が速い。それに対して、NG品10NGは、熱伝導率が小さいために、熱的刺激に対する物理量(温度)の応答速度が遅い。
【0048】
第1工程では、外観では区別が付かないOK品10OKとNG品10NGとを判別するために、上述したボイドBの有無により生じる熱伝導率の差を利用する。つまり、測定対象である全ての半導体装置10に対して熱的刺激を加えることで、ボイドBの有無を測定可能な物理量(温度)として顕在化する。なお、以降、半導体装置10の温度を、単に「温度」と称することもある。なお、第1工程における熱的刺激の程度(半導体装置10の温度をどの程度室温からずらすのか)の決定方法については後述する。
【0049】
第2工程では、熱的刺激の開始時刻から起算して一定時間経過後、又は、熱的刺激の終了時刻から起算して一定時間経過後の半導体装置10の温度を測定する。つまり、ボイドBの有無により第1工程において生じた物理量(温度)の違いを、熱的刺激を加えてから一定時間経過後に測定する。なお、熱的刺激を加えてから温度測定を行うまでの待ち時間、すなわち上述の「一定時間」の決定方法については後述する。
【0050】
第3工程では、第2工程で測定された温度を利用してボイドBの有無を検出する。具体的には、熱的刺激を加えてから一定時間を経過した後の温度を、予め定められている閾値と比較して、ボイドBの有無を決定する。なお、第3工程における閾値の決定方法については後述する。
【0051】
本発明では、以上のような3工程を経ることにより、アンダーフィル樹脂16中のボイドBの有無を検出する。
【0052】
ここで、図2を参照して、上述のボイド検出の流れをより具体的に説明する。図2は、熱的刺激が加えられたOK品10OKとNG品10NGの表面12aの温度の経時変化を模式的に示す特性図である。
【0053】
図2の縦軸は温度(任意単位)を示し、及び横軸は時間(任意単位)を示す。図2には、2本の曲線OK及びNGが描かれており、それぞれOK品10OKの温度変化と、NG品10NGの温度変化に対応する。
【0054】
図2において、時刻t0からt1の間が第1工程に対応し、この間に、半導体装置10に、表面12a側から所定量の熱エネルギーが加えられる。その結果、OK品10OK及びNG品10NGともに、表面12aの温度が室温TRTから上昇する。
【0055】
第1工程が終了して表面12aへの熱エネルギーの供給が止まると、半導体装置10の表面12aの温度は徐々に低下していく。上述のようにOK品10OKと、NG品10NGとでは、この温度低下速度に違いが生じる。すなわち、曲線OKに示すように、OK品10OKは、速やかに温度が減少し、熱的刺激が加えられる前の温度である室温TRTに至る。しかし、曲線NGに示すように、ボイドBが存在するNG品10NGは、ボイドB部分での熱伝導率が小さいために、OK品10OKよりも温度低下速度が遅くなる。
【0056】
よって、第1工程の終了時刻t1から一定時間tt経過後の時刻t2において半導体装置10の表面12aの温度を測定する第2工程を行うことで、OK品10OKとNG品10NGの表面12aの温度の違いを検出することができる。
【0057】
ここで、第2工程において測定されたOK品10OKの表面12aの温度をTOKとし、NG品10NGの表面12aの温度をTNGとする。このとき、両温度には、TNG>TOKなる関係が成り立っている。
【0058】
第3工程では、予め定めておいたTNG>Tth1>TOKなる関係を有する閾値Tth1とTNG及びTOKとを比較することでボイドBの有無を検出する。すなわち半導体装置10の表面12aの温度が閾値Tth1よりも高い場合には、NG品10NGであると判定し、表面12aの温度が閾値Tth1以下の場合には、OK品10OKであると判定する。
【0059】
(熱的刺激の程度、一定時間及び閾値の決定方法)
(1)第1工程における熱的刺激の程度、(2)第2工程における一定時間、及び(3)第3工程における閾値は、互いに関係しあっており、それぞれを独立して決定することは難しい。そのため、これらの値は、事前に行われる予備実験を通じてボイドBの検出率が最も高くなるように決定することが好ましい。
【0060】
以下、この予備実験の一例について詳細に説明する。
【0061】
まず始めに、この実施形態とは異なる方法(例えば、超音波探傷法)でボイドBの有無を判別したOK品10OKとNG品10NGとを、テストサンプルとして予め多数、準備する。以降、テストサンプルのOK品を、「OKテスト品」と称する。また、テストサンプルのNG品を、「NGテスト品」と称する。
【0062】
次に、これらのOKテスト品及びNGテスト品のそれぞれに対して、共通した熱的刺激を加えるとともに、OKテスト品及びNGテスト品の温度の経時変化を測定する。そして、熱的刺激の程度を、例えば、10℃ずつ変化させながら、温度の経時変化測定を繰り返す。これにより、図2の如くの特性図をテストサンプルごとに得る。
【0063】
このようにして得られた温度の経時変化をOKテスト品とNGテスト品との間で比較する。そして、温度測定に伴う誤差を考慮しても、OKテスト品とNGテスト品とが区別可能な温度差を示すように、熱的刺激の程度と「一定時間」とを決定する。同様に、OKテスト品の示す温度と、NGテスト品の示す温度との間の温度に閾値を決定する。
【0064】
(実施形態1)
図2及び図3を参照して、実施形態1のボイドの検出方法について説明する。図3は、ボイドの検出方法に用いるボイド検出装置(以下、単に「検出装置」と称する。)の概略構成を示す模式図である。
【0065】
検出装置20は、赤外線放射温度計22と、レーザ光源24と、ステージ26と、判定部28とを備えている。
【0066】
ステージ26は平面状の載置面26aを備えている。この載置面26aには、載置面26aから突出した突起としての位置決め部品26bが設けられている。この位置決め部品26bに基板14の側面を当接させることで、載置面26a上において半導体装置10の位置決めを行う。
【0067】
レーザ光源24は、位置決めされた半導体装置10の表面12aの全面に向けて、一定出力のレーザ光を一定時間照射するように構成されている。レーザ光源24は、半導体装置10の表面12aとの間の距離が変化しないように、検出装置20の本体に固定されている。レーザ光源24としては、従来公知のものの中から設計に応じて好適なものを選択できるが、例えば、YAGレーザやCO2レーザを好適に用いることができる。
【0068】
赤外線放射温度計22(以下、単に「赤外線温度計22」と称する。)は、物体から放射される赤外線の強度を測定して、物体の温度を測定する温度計である。この実施形態においては、赤外線温度計22は、半導体装置10の表面12aの全面から放射される赤外線を検出するように配置されている。従って、赤外線温度計22が測定する温度は、半導体装置10の表面12aの平均温度である。
【0069】
判定部28は、CPU(Central Processing Unit)30を備えた制御装置32により達成される機能手段であり、赤外線温度計22で測定された表面12aの平均温度TAVを、外部記憶装置34に予め記憶されている第1閾値Tth1と比較することにより、ボイドBの有無の判定を行う。
【0070】
ここで、制御装置32の構成について簡単に説明する。制御装置32は、従来公知のCPU30と外部記憶装置34とタイマ36とで主に構成されている。
【0071】
ここで、CPU30は、制御部30aと、内部記憶部30bと、演算部30cとを備えている。CPU30は、データバスにより、外部記憶装置34に接続されており、これらは例えば一台のコンピュータ(図示せず)を構成していて、図示されないが、キーボードやマウス等の入力手段、ディスプレイ等の表示手段、及びプリンタ等の出力手段を備えている。
【0072】
制御部30aは、外部記憶装置34から読み込まれたアプリケーションプログラムにしたがって、検出装置20の構成要素の個別動作及び協働動作を制御する。
【0073】
内部記憶部30bは、CPU30の動作時に発生した情報などを一時的に格納する。演算部30cは、アプリケーションプログラムの実行などのCPU30の動作に当たり、各種の機能手段として作用する。この機能手段としては、判定部28や、レーザ光源24と赤外線温度計22とを協働して制御する機能手段などが存在している。
【0074】
制御装置32を構成する外部記憶装置34は、従来公知のハードディスクドライブや、ROM(Read only memory)として構成されている。上述のように、外部記憶装置34には、判定部28によるボイドBの有無の判定基準温度としての第1閾値Tth1と、ボイドBの有無の判定に用いるボイド判定式などが記憶されている。
【0075】
次に、図2及び図3を参照して、この実施形態のボイドの検出方法を、上述した第1〜第3工程に従って、より詳細に説明する。
【0076】
(第1工程)
図2を参照すると、時刻t0〜t1の間に行われる第1工程においては、制御装置32からの指令に従って、レーザ光源24から、半導体チップ12の表面12aの全面に向けて所定の出力のレーザ光を、所定時間(t0〜t1)にわたって照射する。つまり半導体装置10に熱的刺激を加える。これにより、半導体チップ12の表面12aには、出力と照射時間との積で与えられる所定量の熱エネルギーが加えられる。
【0077】
なお、レーザ光の加熱条件、すなわちレーザ出力及び照射時間は、半導体チップ12の表面12aの全面が「室温+40℃」以上の平均温度TAVとなるような条件に設定することが好ましい。つまり、室温を約20℃とした場合には、表面12aが60℃以上の平均温度TAVとなるまで加熱することが好ましい。このような条件で半導体チップ12の加熱を行うことで、加熱終了後の半導体チップ12の表面12aの温度減少がボイドBの有無を反映し易くなる。
【0078】
(第2工程)
第2工程においては、第1工程の終了時刻から起算して一定時間tt後(例えば、30秒後)の時刻t2に半導体チップ12の表面12aの平均温度TAVを赤外線温度計22により測定する。つまり、レーザ光の照射が終了した時刻を起算時刻として、一定時間tt後の表面12aの平均温度TAVを測定する。
【0079】
より詳細には、制御装置32は、レーザ光源24からのレーザ光の照射終了をキーとして、タイマ36を作動させる。そして、このタイマ36から一定時間ttが経過した旨の指令を受けると、制御装置32は赤外線温度計22をONにして、半導体チップ12の表面12aの平均温度TAVを測定する。
【0080】
このようにして測定された平均温度TAVは、制御装置32を経由して外部記憶装置34に読み出し自在に一時的に記憶される。
【0081】
(第3工程)
第3工程においては、判定部28は、外部記憶装置34に対して、平均温度TAV、第1閾値Tth1、及びボイド判定式を判定部28に向けて出力する指令を送信する。この指令を受けた外部記憶装置34は、判定部28へ平均温度TAV、第1閾値Tth1及びボイド判定式を出力する。
【0082】
判定部28は、読み出されたボイド判定式に平均温度TAV及び第1閾値Tth1を代入し、得られた結果からボイドBの有無を判定する。具体的には、判定部28は、(平均温度−第1閾値)なるボイド判定式に平均温度TAV及び第1閾値Tth1を代入し、(TAV−Tth1)なる計算を行う。そして、この結果が0(ゼロ)より大きければ、ボイドBが存在する、すなわちNG品10NGであると判定し、0(ゼロ)以下であれば、ボイドBが存在しない、すなわちOK品10OKであると判定する。
【0083】
このようにして得られた判定結果は、制御装置32を経由して、ディスプレイ等の表示装置に表示される。
【0084】
以上説明したように、この実施形態のボイドの検出方法は、熱的刺激を加えてから一定時間経過後の半導体チップ12の表面12aの温度を測定し、得られた温度を第1閾値Tth1と比較して、ボイドBの有無を検出する。従って、この実施形態のボイドの検出方法によれば、アンダーフィル充填条件を変更することがないとともに、半導体装置10の電気的ショートを引き起こす虞なくボイドを検出することが可能となる。
【0085】
なお、この実施形態においては、表面12aの温度を評価するために赤外線温度計22を用いていたが、例えば、サーモグラフィー装置を温度評価に用いてもよい。このようにすることにより、半導体チップ12の表面12aの温度分布を2次元画像として得ることができ、ボイドの位置を特定することが可能となるとともに、ボイドの検出精度を向上させることができる。
【0086】
(実施形態2)
図4(A)及び(B)を参照して、実施形態2のボイドの検出方法について説明する。図4(A)は、ボイドの検出方法に用いる検出装置の概略構成を示す模式図である。図4(B)は、実施形態2において熱的刺激を加えられたOK品10OKとNG品10NGの表面12aの温度の経時変化を模式的に示す特性図である。
【0087】
なお、図4(A)において、図1及び図3と同様の構成要素には同符号を付してその説明を省略する。
【0088】
検出装置40は、赤外線放射温度計22と、高温熱源42と、判定部28とを備えている。
【0089】
高温熱源42は、室温よりも高温で温度が一定に保たれた熱源であり、半導体装置10を載置するステージを兼ねている。より詳細には、高温熱源42は、載置面42aと、温度維持装置42bとを備えている。ここで、高温熱源42の温度をTHとする。
【0090】
載置面42aは平面状に形成されている。この載置面42aに、温度が室温程度の半導体装置10が載置されることにより、半導体装置10に対して熱的刺激が加えられる。より詳細には、半導体装置10が載置面42aに載置されることにより、載置面42aと基板14の第2主面14bとが接触する。その結果、高温熱源42からの熱エネルギーが載置面42a及び基板14の第2主面14bを介して、半導体装置10へと加えられる。
【0091】
温度維持装置42bは、高温熱源42の温度THを一定に保つ機能を有しており、加熱装置と加熱装置を制御するサーミスタ等の制御装置とからなる従来公知の恒温装置である。
【0092】
なお、高温熱源42の温度THは、実施形態1で説明したと同様の理由により、室温よりも40℃以上高い温度とすることが好ましい。
【0093】
また、高温熱源42の熱容量は、半導体装置10との接触によっても温度THが実質的に一定に保たれる程度の大きさとすることが好ましい。
【0094】
次に、図4(A)及び(B)を参照して、この実施形態のボイドの検出方法を、第1〜第3工程に従って、より詳細に説明する。
【0095】
図4(B)の縦軸は温度(任意単位)を示し、及び横軸は時間(任意単位)を示す。図4(B)には、2本の曲線OK及びNGが描かれており、それぞれOK品10OKの温度変化と、NG品10NGの温度変化に対応する。
【0096】
(第1工程)
第1工程においては、基板14の第1主面14aに対向する第2主面14bに高温熱源42を接触させる。
【0097】
図4(B)を参照すると、時刻t0において高温熱源42を第2主面14bに接触させることにより、高温熱源42から半導体装置10に対して熱が供給される。半導体装置10に供給された熱は、基板14の第2主面14b側から、半導体チップ12の表面12aへと伝導して行き、表面12aの温度を徐々に上昇させる。
【0098】
その結果、図4(B)に示すように、OK品10OKの温度は、室温TRTから速やかに上昇して行き、やがて高温熱源42の温度THとほぼ等しい温度に達して平衡に至る。それに対して、上述のようにアンダーフィル樹脂16中にボイドBが存在すると、ボイドBの部分において熱伝導速度が低下するので、単位時間当たりに表面12aに到達する熱量が低下する。その結果、図4(B)に示すように、ボイドBが存在するNG品10NGは、OK品10OKに比較して、表面12aの温度上昇の速度が遅くなる。
【0099】
従って、第1工程の開始時刻t0から起算して一定時間tt後に表面12aの温度を測定する第2工程を行うと、OK品10OKとNG品10NGの表面12aの温度に違いが生じる。第2工程において測定されたOK品10OKの表面12aの温度をTOKとし、NG品10NGの表面12aの温度をTNGとすると、両温度には、TNG<TOKなる関係が成り立つ。
【0100】
従って、TNGとTOKとの間の温度に第2閾値Tth2が設定されていれば、OK品10OKとNG品10NGとを判別することができる。つまり、ボイドBの有無を検出することができる。
【0101】
(第2工程)
第2工程は、高温熱源42が第2主面14bに接触した状態で行われ、第1工程の開始時刻t0から起算して一定時間tt後の時刻t1に、表面12aの平均温度TAVを赤外線温度計22により測定する。すなわち、この実施形態においては、第2工程は、第1工程と並行して実施される。
【0102】
より詳細には、制御装置32は、半導体装置10が載置面42aに載置されたことをキーとして、タイマ36を作動させる。そして、このタイマ36から一定時間ttが経過した旨の指令を受けると、制御装置32は赤外線温度計22をONにして、半導体チップ12の表面12aの平均温度TAVを測定する。
【0103】
このようにして測定された平均温度TAVは、制御装置32を経由して外部記憶装置34に読み出し自在に一時的に記憶される。
【0104】
(第3工程)
第3工程においては、判定部28は、外部記憶装置34に対して、平均温度TAV、第2閾値Tth2、及びボイド判定式を判定部28に向けて出力する指令を送信する。この指令を受けた外部記憶装置34は、判定部28へ平均温度TAV、第2閾値Tth2及びボイド判定式を出力する。
【0105】
判定部28は、読み出されたボイド判定式に平均温度TAV及び第2閾値Tth2を代入し、得られた結果からボイドの有無を判定する。具体的には、判定部28は、(平均温度−第2閾値)なるボイド判定式に平均温度TAV及び第2閾値Tth2を代入し、(TAV−Tth2)なる計算を行う。そして、この結果が0(ゼロ)以下であれば、ボイドBが存在する、すなわちNG品10NGであると判定し、0より大きければ、ボイドBが存在しない、すなわちOK品10OKであると判定する。
【0106】
なお、第2閾値Tth2は、(熱的刺激の程度、一定時間及び閾値の決定方法)の項で説明したと同様の方法で予め決定しておく。
【0107】
このようにして得られた判定結果は、制御装置32を経由して、ディスプレイ等の表示装置に出力される。
【0108】
以上説明したように、この実施形態のボイドの検出方法は、熱的刺激を加えてから一定時間経過後の半導体チップ12の表面12aの温度を測定し、得られた温度を第2閾値Tth2と比較して、ボイドBの有無を検出する。従って、この実施形態のボイドの検出方法によれば、アンダーフィル充填条件を変更することがないとともに、半導体装置10の電気的ショートを引き起こす虞なくボイドを検出することが可能となる。
【0109】
また、第1工程と第2工程とを並行して実施するので、実施形態1に比較して、より迅速にボイドBを検出することができる。
【0110】
(実施形態3)
図5(A)及び(B)を参照して、実施形態3のボイドの検出方法について説明する。図5(A)は、ボイドの検出方法に用いる検出装置の概略構成を示す模式図である。図5(B)は、実施形態3において熱的刺激を加えられたOK品10OKとNG品10NGの表面12aの温度の経時変化を模式的に示す特性図である。
【0111】
なお、図5(A)において、図1、図3及び図4(A)と同様の構成要素には同符号を付してその説明を省略する。
【0112】
実施形態3の検出装置60は、熱源が室温よりも低温の低温熱源である点を除いて、実施形態2の検出装置40と同様に構成されている。従って、実施形態2との重複説明を極力避け、主に相違点について説明する。
【0113】
検出装置60は、赤外線放射温度計22と、低温熱源62と、判定部28とを備えている。
【0114】
低温熱源62は、室温よりも低温で温度が一定に保たれた熱源であり、半導体装置10を載置するステージを兼ねている。より詳細には、低温熱源62は、載置面62aと、温度維持装置62bとを備えている。ここで、低温熱源62の温度をTLとする。
【0115】
載置面62aは平面状に形成されている。この載置面62aに、温度が室温程度の半導体装置10が載置されることにより、半導体装置10に対して熱的刺激が加えられる。より詳細には、半導体装置10が載置面62aに載置されることにより、載置面62aと基板14の第2主面14bとが接触する。その結果、熱エネルギーが半導体装置10から載置面62a及び基板14の第2主面14bを介して、低温熱源62へと移動する。
【0116】
温度維持装置62bは、低温熱源62の温度TLを一定に保つ機能を有しており、冷却装置と冷却装置を制御するサーミスタ等の制御装置とからなる従来公知の恒温装置である。
【0117】
なお、低温熱源62の温度TLは、室温よりも40℃以上低い温度とすることが好ましい。低温熱源62の温度をこのような温度TLとすることにより、第2主面14bとの接触中における半導体チップ12の表面12aの温度低下がボイドBの有無を反映し易くなる。
【0118】
また、低温熱源62の熱容量は、半導体装置10との接触によっても温度TLが実質的に一定に保たれる程度の大きさとすることが好ましい。
【0119】
次に、図5(A)及び(B)を参照して、この実施形態のボイドの検出方法を、第1〜第3工程に従って、より詳細に説明する。
【0120】
図5(B)の縦軸は温度(任意単位)を示し、及び横軸は時間(任意単位)を示す。図5(B)には、2本の曲線OK及びNGが描かれており、それぞれOK品10OKの温度変化と、NG品10NGの温度変化に対応する。
【0121】
(第1工程)
第1工程においては、基板14の第1主面14aに対向する第2主面14bに低温熱源62を接触させる。
【0122】
図5(B)を参照すると、時刻t0において低温熱源62を第2主面14bに接触させることにより、低温熱源62へと半導体装置10から熱が奪われる。半導体装置10から熱が奪われることにより、表面12aの温度は徐々に低下していく。
【0123】
その結果、図5(B)に示すように、OK品10OKの温度は、室温TRTから速やかに低下して行き、やがて低温熱源62の温度TLとほぼ等しい温度に達して平衡に至る。それに対し、上述のようにアンダーフィル樹脂16中にボイドBが存在すると、ボイドBの部分において熱伝導速度が低下するので、単位時間当たりに表面12aから奪われる熱量が低下する。その結果、図5(B)に示すように、ボイドBが存在するNG品10NGは、OK品10OKに比較して、表面12aの温度低下の速度が遅くなる。
【0124】
従って、第1工程の開始時刻t0から起算して一定時間tt後に表面12aの温度を測定する第2工程を行うと、OK品10OKとNG品10NGの表面12aの温度に違いが生じる。第2工程において測定されたOK品10OKの表面12aの温度をTOKとし、NG品10NGの表面12aの温度をTNGとすると、両温度には、TNG>TOKなる関係が成り立つ。
【0125】
従って、TNGとTOKとの間の温度に第3閾値Tth3を設定すれば、OK品10OKとNG品10NGとを判別することができる。つまり、ボイドBの有無を検出することができる。
【0126】
(第2工程)
第2工程は、低温熱源62が第2主面14bに接触した状態で行われ、第1工程の開始時刻t0から起算して一定時間tt後の時刻t1に、表面12aの平均温度TAVを赤外線温度計22により測定する。すなわち、この実施形態においては、第2工程は、第1工程と並行して実施される。
【0127】
より詳細には、制御装置32は、半導体装置10が載置面62aに載置されたことをキーとして、タイマ36を作動させる。そして、このタイマ36から一定時間ttが経過した旨の指令を受けると、制御装置32は赤外線温度計22をONにして、半導体チップ12の表面12aの平均温度TAVを測定する。
【0128】
このようにして測定された平均温度TAVは、制御装置32を経由して外部記憶装置34に読み出し自在に一時的に記憶される。
【0129】
(第3工程)
第3工程においては、判定部28は、外部記憶装置34に対して、平均温度TAV、第3閾値Tth3、及びボイド判定式を判定部28に向けて出力する指令を送信する。この指令を受けた外部記憶装置34は、判定部28へ平均温度TAV、第3閾値Tth3及びボイド判定式を出力する。
【0130】
判定部28は、読み出されたボイド判定式に平均温度TAV及び第3閾値Tth3を代入し、得られた結果からボイドの有無を判定する。具体的には、判定部28は、(平均温度−第3閾値)なるボイド判定式に平均温度TAV及び第3閾値Tth3を代入し、(TAV−Tth3)なる計算を行う。そして、この結果が0(ゼロ)より大きければ、ボイドBが存在する、すなわちNG品10NGであると判定し、0(ゼロ)以下であれば、ボイドBが存在しない、すなわちOK品10OKであると判定する。なお、第3閾値Tth3は、(熱的刺激の程度、一定時間及び閾値の決定方法)の項で説明したと同様の方法で予め決定しておく。
【0131】
このようにして得られた判定結果は、制御装置32を経由して、ディスプレイ等の表示装置に出力される。
【0132】
以上説明したように、この実施形態のボイドの検出方法によれば、アンダーフィル充填条件を変更することがないとともに、半導体装置10の電気的ショートを引き起こす虞なくボイドを検出することが可能となる。
【0133】
また、第1工程と第2工程とを並行して実施するので、実施形態1に比較して、より迅速にボイドBを検出することができる。
【符号の説明】
【0134】
10 半導体装置
10OK OK品
10NG NG品
12 半導体チップ
12a 表面
12b 裏面
12c バンプ
14 基板
14a 第1主面
14b 第2主面
16 アンダーフィル樹脂
20,40,60 ボイド検出装置(検出装置)
22 赤外線放射温度計(赤外線温度計)
24 レーザ光源
26 ステージ
26a,42a,62a 載置面
26b 位置決め部品
28 判定部
30 CPU
30a 制御部
30b 内部記憶部
30c 演算部
32 制御装置
34 外部記憶装置
36 タイマ
42 高温熱源
42b,62b 温度維持装置
62 低温熱源
【特許請求の範囲】
【請求項1】
基板と、該基板の第1主面側に裏面を臨ませて実装された半導体チップと、前記半導体チップ及び基板の間に充填されたアンダーフィル樹脂とを備えた半導体装置において前記アンダーフィル樹脂中のボイドを検出するに当たり、
前記半導体装置に対して熱的刺激を加える第1工程と、
前記熱的刺激を加えてから一定時間経過後の前記半導体装置の温度を測定する第2工程と、
当該温度から前記ボイドの有無を検出する第3工程とを備えることを特徴とするボイドの検出方法。
【請求項2】
前記第2工程が、前記半導体チップの前記裏面に対向する表面の温度を測定する工程であることを特徴とする請求項1に記載のボイドの検出方法。
【請求項3】
前記第1工程が、前記半導体チップの前記表面に所定量の熱エネルギーを加える工程であり、
前記第2工程が、前記第1工程の終了時刻から起算して一定時間後に前記表面の温度を測定する工程であり、
前記第3工程が、前記表面の温度が第1閾値よりも高い場合に前記ボイドが存在すると判断し、及び前記表面の温度が前記第1閾値以下の場合に前記ボイドが存在しないと判断する工程であることを特徴とする請求項1又は2に記載のボイドの検出方法。
【請求項4】
前記第1工程が、前記表面に向けて一定出力のレーザ光を一定時間にわたり照射する工程であることを特徴とする請求項3に記載のボイドの検出方法。
【請求項5】
前記第1工程が、前記基板の前記第1主面に対向する第2主面に一定温度の熱源を接触させる工程であり、
前記第2工程が、前記熱源が前記第2主面に接触した状態で行われ、前記第1工程の開始時刻から起算して一定時間後に前記表面の温度を測定する工程であることを特徴とする請求項1又は2に記載のボイドの検出方法。
【請求項6】
前記熱源が室温よりも温度が高い高温熱源であり、
前記第3工程が、前記表面の温度が第2閾値よりも高い場合に前記ボイドが存在しないと判断し、及び前記表面の温度が前記第2閾値以下の場合に前記ボイドが存在すると判断する工程であることを特徴とする請求項5に記載のボイドの検出方法。
【請求項7】
前記熱源が室温よりも温度が低い低温熱源であり、
前記第3工程が、前記表面の温度が第3閾値よりも高い場合に前記ボイドが存在すると判断し、及び前記表面の温度が前記第3閾値以下の場合に前記ボイドが存在しないと判断する工程であることを特徴とする請求項5に記載のボイドの検出方法。
【請求項1】
基板と、該基板の第1主面側に裏面を臨ませて実装された半導体チップと、前記半導体チップ及び基板の間に充填されたアンダーフィル樹脂とを備えた半導体装置において前記アンダーフィル樹脂中のボイドを検出するに当たり、
前記半導体装置に対して熱的刺激を加える第1工程と、
前記熱的刺激を加えてから一定時間経過後の前記半導体装置の温度を測定する第2工程と、
当該温度から前記ボイドの有無を検出する第3工程とを備えることを特徴とするボイドの検出方法。
【請求項2】
前記第2工程が、前記半導体チップの前記裏面に対向する表面の温度を測定する工程であることを特徴とする請求項1に記載のボイドの検出方法。
【請求項3】
前記第1工程が、前記半導体チップの前記表面に所定量の熱エネルギーを加える工程であり、
前記第2工程が、前記第1工程の終了時刻から起算して一定時間後に前記表面の温度を測定する工程であり、
前記第3工程が、前記表面の温度が第1閾値よりも高い場合に前記ボイドが存在すると判断し、及び前記表面の温度が前記第1閾値以下の場合に前記ボイドが存在しないと判断する工程であることを特徴とする請求項1又は2に記載のボイドの検出方法。
【請求項4】
前記第1工程が、前記表面に向けて一定出力のレーザ光を一定時間にわたり照射する工程であることを特徴とする請求項3に記載のボイドの検出方法。
【請求項5】
前記第1工程が、前記基板の前記第1主面に対向する第2主面に一定温度の熱源を接触させる工程であり、
前記第2工程が、前記熱源が前記第2主面に接触した状態で行われ、前記第1工程の開始時刻から起算して一定時間後に前記表面の温度を測定する工程であることを特徴とする請求項1又は2に記載のボイドの検出方法。
【請求項6】
前記熱源が室温よりも温度が高い高温熱源であり、
前記第3工程が、前記表面の温度が第2閾値よりも高い場合に前記ボイドが存在しないと判断し、及び前記表面の温度が前記第2閾値以下の場合に前記ボイドが存在すると判断する工程であることを特徴とする請求項5に記載のボイドの検出方法。
【請求項7】
前記熱源が室温よりも温度が低い低温熱源であり、
前記第3工程が、前記表面の温度が第3閾値よりも高い場合に前記ボイドが存在すると判断し、及び前記表面の温度が前記第3閾値以下の場合に前記ボイドが存在しないと判断する工程であることを特徴とする請求項5に記載のボイドの検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−54724(P2011−54724A)
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願番号】特願2009−201743(P2009−201743)
【出願日】平成21年9月1日(2009.9.1)
【出願人】(000000295)沖電気工業株式会社 (6,645)
【出願人】(591020663)長野沖電気株式会社 (9)
【Fターム(参考)】
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願日】平成21年9月1日(2009.9.1)
【出願人】(000000295)沖電気工業株式会社 (6,645)
【出願人】(591020663)長野沖電気株式会社 (9)
【Fターム(参考)】
[ Back to top ]