
ボトルの残液検査装置
【課題】特殊な水検知センサに依存することなく、ボトル内の残液の有無を判別することが可能な残液検査装置を提供する。
【解決手段】ピッチ割り装置4、あるいは本体内搬送機構14によって揺すられたボトル2の底部を口部から覗き込むようにしてカメラで撮像し、取得された底部の像内における明暗の分布に基づいて、ボトルの残液の有無を判別する。残液が揺すられた泡の影響で明度が変化する箇所が底部画像内の適度な範囲に所定数以上存在する場合に、ボトル内に残液が存在すると判別する。
【解決手段】ピッチ割り装置4、あるいは本体内搬送機構14によって揺すられたボトル2の底部を口部から覗き込むようにしてカメラで撮像し、取得された底部の像内における明暗の分布に基づいて、ボトルの残液の有無を判別する。残液が揺すられた泡の影響で明度が変化する箇所が底部画像内の適度な範囲に所定数以上存在する場合に、ボトル内に残液が存在すると判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ボトル内における残液の有無を判別する装置に関する。
【背景技術】
【0002】
飲料容器等として使用されるボトルに内容物を充填する場合、ボトル内に液体が残っていると充填後の液量が増え、あるいは内容物の品質が変化する不都合がある。そこで、内容物の充填に先立って、ボトル内に液体が残っていないか否かを判別する残液検査が行われることがある。従来の残液検査としては、高周波あるいはレーザ光を利用して水分を検知するセンサにて残液(ボトル内に残された液体)の有無を判別している。なお、液中に沈降している異物の有無を検査する装置としては、ボトルの側方からレーザ光を照射して底部を撮像し、得られた画像から異物の有無を判別する装置が知られている(例えば特許文献1参照)。
【特許文献1】特開平5−79999号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
水検知用のセンサは用途が限られた特殊なセンサであり、その設置に際しては特別なガイド、ハンドリングが必要となる。検出対象の液種、ボトルの変更等に応じて位置調整、あるいは感度調整が必要不可欠で取り扱いにも手間がかかる。さらに油分等は検出できないことがある。
【0004】
そこで、本発明は、特殊な水検知センサに依存することなく、ボトル内の残液の有無を判別することが可能な残液検査装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の残液検査装置は、ボトル(2)を揺する加振手段(4、14)と、前記加振手段にて揺すられたボトルの底部(2a)を口部(2b)から覗き込むようにして撮像する撮像手段(21)と、取得された前記底部の像内における明暗の分布に基づいて、前記ボトルの残液の有無を判別する判別手段(23)と、を備えることにより、上述した課題を解決する。
【0006】
本発明の残液検査装置によれば、加振手段でボトルを揺すっているので、ボトル内に液体が残っている場合にはその残液も揺すられて液面が泡立つ。泡が生じているボトルの底部を口部から覗き込むように撮像した場合、得られた底部の画像には泡の影響で明度が変化した箇所が出現する。残液の泡は、底部内において適度な広がりをもった範囲内で多数発生するから、泡の影響で明度が変化する箇所の分布状況もその泡の分布に対応した特徴を呈する。一方、ボトルの底部に異物、傷といった欠陥が存在する場合にもその欠陥箇所で画像内に明度の変化が生じるが、欠陥は底部の特定箇所に偏って出現することが通例であって、その個数も少ない。つまり、液体が残っているボトルを揺すってからその底部を撮像した場合、その画像には泡の分布に対応した特徴的な明暗の分布が現れる。その特徴の有無を判別手段にて検査することにより、残液の有無を判別することが可能となる。ボトル検査において多用されている画像処理装置の技術を利用して残液検査を実施することにより、水検知用の特殊なセンサを必須とせず、また、油分等であっても、ボトルを揺すって泡立てることができる液体である限り、その存在を検出することができる。
【0007】
本発明の残液検査装置の一形態において、前記判別手段は、正常な底部を撮像したときの基準明度とは異なる異常明度を示す箇所を前記底部の像内にて検出し、その異常明度を示す箇所の前記像内における分布状況に基づいて、前記残液の有無を判別してもよい。この形態によれば、異常明度の箇所が検出された場合に、これを残液の泡に対応する箇所と仮定し、その異常明度の箇所が泡の分布に対応する分布を示しているか否かを判断することにより、残液の有無を判別することができる。
【0008】
上記の形態において、前記判別手段は、前記底部の像を複数の領域(A1〜A3)に区分し、前記異常明度を示す箇所が所定数以上検出された領域が少なくとも一つ存在する場合に前記残液が存在すると判別してもよい。異常明度の箇所が泡に対応するものであれば、その泡が存在する領域においてある程度まとまった個数の異常明度箇所が検出され、異物等の欠陥であれば、異常明度の箇所が検出されてもその個数は泡の場合よりも十分に少ない蓋然性が高い。よって、本形態によれば、残液の存在を、欠陥が存在する場合とは区別して比較的高精度に判別することができる。
【0009】
さらに、前記判別手段は、前記複数の領域の全てにおいて前記異常明度を示す箇所の検出数が前記所定数未満であり、かつ前記箇所が前記所定数未満の範囲内で検出された領域が少なくとも一つ存在する場合に、前記底部に欠陥が存在すると判別してもよい。この形態によれば、同一の撮像手段を利用してボトルの残液の有無と、異物、傷等の欠陥とを区別して検出することができる。これにより、残液検査装置を欠陥検査装置としても兼用させることができる。言い換えれば、残液存在時に固有の明暗分布の有無を判別する機能を既存の欠陥検査装置に追加することにより、本発明の残液検査装置を実現することができる。
【0010】
本発明の残液検査装置では、前記ボトルを揺すりつつ搬送する搬送手段(4、14)を前記加振手段として利用してもよい。これにより、加振手段を容易に実現することができる。
【0011】
前記搬送手段は、順次搬入される複数のボトルのピッチを拡大させつつ送り出すピッチ割り装置(4)を含んでいてもよい。ピッチ割り装置は、ボトルを検査に適したピッチで整列させて搬入する手段として検査装置の搬入側に付帯設備として設置されることが多い。そのピッチ割り装置では、ボトルが加速されてピッチが強制的に整えられ、その過程でボトルが比較的強く揺すられる。その揺れを利用してボトル内の残液を十分に泡立たせることにより、残液の検査精度をさらに高めるとともに、検査装置の付帯設備であるピッチ割り装置を加振手段の少なくとも一部として有効に活用することができる。
【0012】
前記搬送手段は、ボトルの胴部を挟み込んで支持し、かつボトルの底部側及び口部側は開放した状態で前記ボトルを搬送する胴部支持搬送機構(14)を含んでおり、前記胴部支持搬送機構の下方には、前記ボトルを底部側から照明する照明手段(20)が設けられ、前記撮像手段は、前記照明手段にて照明されたボトルの底部をその口部側から覗き込むようにして撮像してもよい。ボトルを底部側から照明しつつ口部側から覗き込むようにして底部を撮像する構成は、底部の欠陥検査等を目的とする検査装置にて採用されている構成である。その構成を流用することにより、本発明の残液検査装置をより容易に実現することができる。
【0013】
なお、以上の説明では本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記したが、それにより本発明が図示の形態に限定されるものではない。
【発明の効果】
【0014】
以上に説明したように、本発明によれば、ボトルを揺すった上でその底部を口部から覗き込むように撮像し、得られた画像内の明暗の分布に基づいて残液の有無を判別するようにしたので、水検知用の特殊なセンサを必須とすることなく、ボトル検査において多用されている画像処理装置の技術を利用して残液の有無を判別することが可能となる。また、油分等であっても、ボトルを揺すって泡立てることができる液体である限り、その存在を検出することができる利点もある。
【発明を実施するための最良の形態】
【0015】
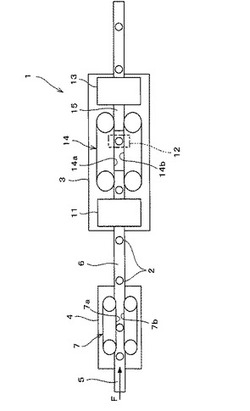
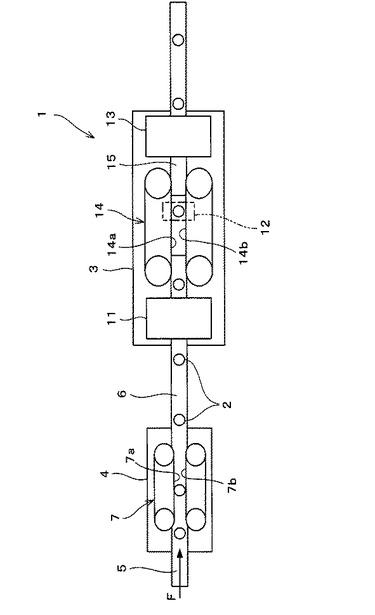
図1は本発明に係る残液検査装置の一形態として構成されたボトル検査機を示している。ボトル検査機1は、ボトル2の検査を実行する検査機本体3と、その検査機本体3に対して検査対象のボトル2を適切なピッチで1本ずつ送り出すピッチ割り装置4とを備えている。検査対象のボトル2は、不図示の洗浄機で洗浄され、かつ飲料物等の内容物が充填される前の状態であり、その口部は王冠等の栓によって封印されることなく開封されている。
【0016】
ピッチ割り装置4は、第1コンベア5と、第2コンベア6と、それらのコンベア5、6の間でボトル2を移送する移送機構7とを備えている。コンベア5、6は、ボトル2を水平な搬送面に乗せて直線的に搬送するトップチェーン式のコンベアであって、それらの搬送方向は互いに一致している。洗浄済のボトル2は、その口部を上方に向けた状態で第1コンベア5に対して図中の矢印F方向に1本ずつ順次搬入される。第2コンベア6の搬送速度は、第1コンベア5のそれよりも高く設定されている。移送機構7は、コンベア5、6によるボトル2の搬送経路を左右から挟むように配置された一対のベルト7a、7bを有している。ベルト7a、7bはコンベア5、6の搬送方向(矢印F方向)と同一方向に走行駆動される。第1コンベア5の終端部まで搬送されたボトル2の胴部がベルト7a、7b間に挟み込まれ、そのボトル2がベルト7a、7bの走行に伴って第2コンベア6へと移送されることにより、ボトル2が加速されてボトル2間のピッチ(搬送方向の間隔)が検査に適した値まで広げられる。第2コンベア6に移送されたボトル2はその第2コンベア6によって検査機本体3に搬入される。なお、第2コンベア6は検査機本体3の内部に幾らか入り込んでいる。
【0017】
検査機本体3には、第1の胴検査部11と、底検査部12と、第2の胴検査部13と、本体内搬送機構14とが設けられている。第1の胴検査部11は、第2コンベア6によって搬送されるボトル2の胴部の半周を側方から撮影して、異物付着等の欠陥の有無を判別する。底検査部12は、本体内搬送機構14にて搬送されるボトル2の底部の画像を取得して底部に関する所定の検査を実行する。底検査部12の詳細は後述する。第2の胴検査部13は、第3コンベア15によって搬送されるボトル2の胴部の残りの半周を側方から撮影して欠陥の有無を判別する。第3コンベア15は、第1コンベア5及び第2コンベア6と同一方向にボトル2を直線的に搬送するように設けられている。第3コンベア15の搬送速度は第2コンベア6のそれと等しい。第3コンベア15は検査機本体3の下流側まで延ばされて不図示のアキューム装置までボトル2を搬送する。アキューム装置のさらに下流には、ボトル2に内容物(飲料)を充填する内容物充填装置が配置される。
【0018】
本体内搬送機構14は、第2コンベア6から第3コンベア15へとボトル2を搬送する。その本体内搬送機構14は、コンベア6、15によるボトル2の搬送経路を左右から挟むように配置された一対のベルト14a、14bを有している。ベルト14a、14bは、コンベア6、15によるボトル2の搬送方向と同一方向にコンベア6、15と同一速度で走行駆動される。第2コンベア6の終端部まで搬送されたボトル2の胴部がベルト14a、14b間に挟み込まれ、そのボトル2がベルト14a、14bの走行に伴って第3コンベア15へと移送される。ベルト14a、14bによる搬送区間においては、ボトル2の底部側及び口部側には支持手段が設けられていない。つまり、第2コンベア6と第3コンベア15との間において、ボトル2はその胴部2c(図2参照)がベルト14a、14b間に挟み込まれて支持された状態で搬送され、底部側の下方及び口部の上方は開放されたオープンスペースとなっている。これにより、本体内搬送機構14は胴部支持搬送機構として機能する。
【0019】
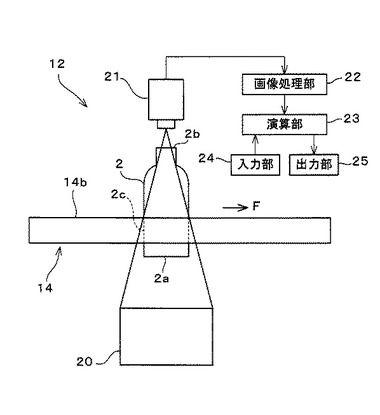
図2は底検査部12の構成を示している。一般に、底検査部12は、ボトル2の底部2aにおける異物の付着、傷といった欠陥の有無を検査する目的で設けられているが、本形態ではその底検査部12にてボトル2内の残液の有無も検査する。底検査部12は、ボトル2の下方に配置されてボトル2を底部2a側から上方に向かって照明する照明手段としての照明器20と、ボトル2の底部2aを口部2bから覗き込むようにして撮像する撮像手段としてのカメラ21と、カメラ21で撮像された画像信号を、検査に適したデジタル画像信号へと変換する画像処理部22と、画像処理部22で得られた画像を解析する判別手段としての演算部23とを備えている。
【0020】
照明器20はボトル2に対して所定周期でパルス光を照射する。照明器20は、一例として、多数のLEDを光源として使用するLED照明器である。パルス光が照射されたボトル2を口部2b側からカメラ21にて撮影することにより、照明されたボトル2の底部2aの静止画像を取得することができる。カメラ21は、固体撮像素子を利用してボトル2の底部2aの画像を光電変換してアナログ画像信号を出力する。画像処理部22は、カメラ21から出力される画像信号をAD変換してボトル2の底部2aの画像を所定階調(例えば256階調)のデジタル画像へと変換する。
【0021】
演算部23は、マイクロコンピュータとその動作に必要な主記憶装置等を組み合わせたコンピュータユニットとして構成され、画像処理部22から出力された画像を所定のアルゴリズムに従って検査することにより、底部2aにおける欠陥の有無、及び残液の有無を判別する。演算部23には、検査に必要な情報等をオペレータが入力するための入力部24と、撮影された画像や検査結果等をオペレータに出力するための出力部25とが接続されている。なお、照明器20からカメラ21に至る光路には偏向フィルタ等の光学要素を必要に応じて設けてもよい。ボトル2がベルト14a、14bから誤って落下した場合でも照明器20とベルト14a、14bの間にボトル2が詰まることがないように、照明器20はボトル2の底部2aから下方に十分に離して設置することが望ましい。
【0022】
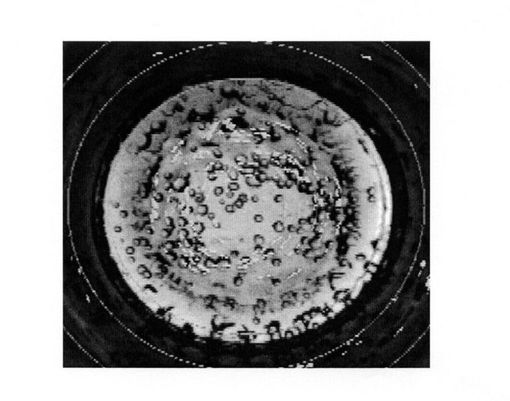
次に、図3及び図4を参照して、演算部23における検査の原理を説明する。図3は、内部に液体が残っているボトル(以下、これを残液ボトルと呼ぶことがある。)2をカメラ21にて撮影した画像の一例を示している。ボトル検査機1では、ピッチ割り装置4、あるいは、本体内搬送機構14によってボトル2が搬送される間にボトル2が揺すられる。特に、ピッチ割り装置4では、移送機構7による移送過程でボトル2が加速されるため、ボトル2が比較的強く揺すられる。このため、ボトル2内に液体が残されている場合、その残液も揺すられて液面が泡立ち、その泡立った液面の画像がカメラ21にて撮影される。図3に示す画像においては、白色部分が液面であり、その液面中に点在する粒状部分が泡の像である。なお、白色部分よりも外側はボトル2の胴部2c又はそれよりも外側の領域に相当する。
【0023】
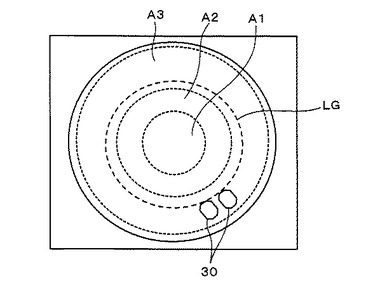
一方、図4はボトル2の内部に残液がなく、かつ底部(但し、内面側)2aに異物30が付着しているときの画像を模式的に示している。この場合、ボトル2の底部2aはほぼ一様な明度で撮影され、異物30の明度は周囲の明度を基準明度としたときに、その基準明度と比して明確に相違する。異物30に代えて底部2aに傷等が存在する場合も同様である。なお、基準明度とは、欠陥も残液もない正常なボトル2の底部2aを撮像したときの底部2aの像の明るさを代表する明度である。画像中の泡と欠陥とは、いずれも周囲の基準明度と比較して明るさが明確に異なる箇所(以下、その箇所を異常明度箇所と呼ぶ。)として検出することが可能であるが、そのような検出ロジックだけでは欠陥と泡との区別が困難となるおそれがある。ところが、図3と図4との比較から明らかなように、残液ボトル2の画像では、異常明度箇所(つまり泡)が適度な広がりを有する範囲内にて満遍なく散らばっているのに対して、欠陥に関しては底部2a内の多くても数ヶ所程度にとどまる。そこで、異常明度箇所の分布状況を参照すれば残液又は欠陥を区別することができる。本形態では、図4に示したように、ボトル2の底部の画像を半径方向に関して複数の領域A1〜An(図示例ではn=3)に区分し、いずれかの領域で異常明度箇所がある程度まとまった個数以上検出された場合にボトル2に液体が残っていると判別し、一部の領域で異常明度箇所が検出されていても、その検出数が少ない場合にはボトル2に欠陥が存在すると判別する。なお、図4から明らかなように、本形態では、底部の画像上において円形のライトゲートLGを設定して、検査に適しないボトル2を識別するための補充的な検査を併せて実施するが、この点は後述する。
【0024】
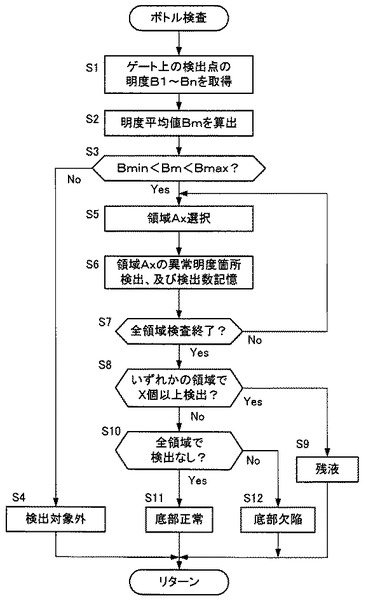
図5は、演算部23が上述した原理に基づいてボトル2を検査するために実施するボトル検査ルーチンを示している。このボトル検査ルーチンは、ボトル2の画像が演算部23に取り込まれる毎に実施される。図5のボトル検査ルーチンにおいて、演算部23は、まずステップS1で画像に対して円形のライトゲートLGを設定し、そのライトゲートLGを円周方向に等分する複数(一例として32個)の検出点のそれぞれにおける画素の明度(階調値)B1〜Bnが取得される。ライトゲートLGは、ボトル2の底部2aが、異物等の欠陥が存在しない正常な状態のときに、照明光に対する透過率が周方向に概ね均一となるような領域に設定すればよい。一例として底部2aの直径の1/3程度の位置に設定される。
【0025】
続いて、演算部23はステップS2で明度B1〜Bnの平均値Bmを算出し、次のステップS3で明度平均値Bmが所定の下限値Bminと上限値Bmaxとの間にあるか否か判断する。下限値Bmin及び上限値Bmaxは、ボトル2の内部にセメント等の異物が全面的に詰まっている等の理由により底部2aの画像の全体が暗い場合、及び、ボトル2の底部2aが抜けていて画像の全体が明るい場合に、それらのボトル2を検出対象から除外する目的で設定される閾値である。例えば底部2aの画像において、算出された明度平均値Bmが下限値Bminより小さい場合には異物が全面的に詰まっていると識別し、一方、明度平均値Bmが上限値Bmaxより大きい場合には底部2aが抜けているボトルとして識別することができる。
【0026】
ステップS3で明度平均値Bmが下限値Bminよりも低い、又は上限値Bmaxよりも高い場合、演算部23はステップS4に進み、撮影されたボトル2が検出対象外のボトルであると識別して検査ルーチンを終える。一方、ステップS3にて明度平均値Bmが下限値Bminと上限値Bmaxとの間にあった場合、演算部23はステップS5に進み、ボトル2の底部2aの画像に設定される領域A1〜An(図4参照)から、検査対象の一つの領域Axを選択する。続くステップS6で、演算部23は、検査対象の領域Axの画素の明度を検査して、欠陥又は泡に相当する異常明度箇所の検出数を記憶する。異常明度箇所を検出するためのロジックは、底部の異物、傷等の欠陥を検出するために使用される公知の検査装置と同様でよい。次のステップS7において、演算部23は、全ての領域A1〜Anに関してステップS6の検査が終了したか否か判断する。まだ検査していない領域が存在する場合、演算部23はステップS5へ戻って未検査の領域を新たに検査対象の領域Axとして選択して以降の処理を繰り返す。
【0027】
ステップS7で全ての領域A1〜Anの検査が終了したと判断された場合、演算部23はステップS8へ進み、いずれかの領域にて異常明度箇所が所定数X以上検出されたか否か判断する。検出数Xは、異常明度箇所が泡に相当する場合と、欠陥に相当する場合とを区別できる閾値として設定される。ステップS8が肯定判断された場合、演算部23はステップS9に進み、検査対象のボトル2が残液ボトルであると判別して検査ルーチンを終える。一方、ステップS8が否定判断された場合、すなわち全ての領域で異常明度箇所の検出数がX未満と判断された場合、演算部23はステップS10へ進み、全領域で異常明度箇所が検出されていない(つまり検出数=0)か否か判断する。ステップS10が肯定判断された場合、演算部23はステップS11に進み、検査対象のボトル2が残液も欠陥もない正常なボトルであると判別して検査ルーチンを終える。一方、ステップS10が否定判断された場合、すなわち、少なくとも一つの領域で異常明度箇所がX未満の個数だけ検出されている場合、演算部23はステップS12へ進み、底部2aに異物30の付着といった欠陥が存在すると判別して検査ルーチンを終える。
【0028】
ステップS4で検出対象外として判別され、ステップS9で残液ボトルと判別され、あるいはステップS12で底部2aに欠陥があると判別されたボトル2は、第3コンベア15によって検査機本体3から搬出された後、正常なボトル2の搬送経路から排除される。第1胴検査部11、又は第2胴検査部13にて胴部2cに欠陥が存在すると判別されたボトル2も同様である。各検査部11〜13にて正常と判別されたボトル2は検査機1を通過して後続する内容物充填工程へと送り出される。ボトル2の検査結果と、検査機1から搬出されるボトル2との対応関係は、ボトル2の搬出速度と検査時からの経過時間とから特定すればよい。
【0029】
本発明は上述した形態に限定されることなく、種々の形態にて実施してよい。例えば、本発明は、欠陥の有無を判別せず、残液の有無のみを判別する残液検査装置として構成されてもよい。図4では底部を3つの領域に区分する例を示したが、その区分数は適宜に変更してもよい。本発明は、底部を複数領域に区別することを必ずしも要しない。底部の画像における明暗の分布に基づいて残液の有無を判別する限りにおいて、本発明は、適宜の変更が可能である。例えば、泡が底部に適度な密度で存在することから、泡に相当する可能性のある明度変化箇所(上記の形態では異常明度箇所)の密度、重心位置等を特定し、それらを手掛かりとして残液の有無を判別してもよい。上記の形態では、搬送手段としてのピッチ割り装置4及び本体内搬送機構(胴部支持搬送機構)14を加振手段として利用しているが、これに限らず、ボトル2内の残液を泡立てることができる程度にボトル2を揺することができるものであれば、加振手段として適宜に利用してよい。例えば、ボトル2の搬送経路の途中に加振器を設置してボトル2を揺すってもよい。
【図面の簡単な説明】
【0030】
【図1】本発明に係る残液検査装置の一形態として構成されたボトル検査機を示す平面図。
【図2】底検査部の構成を示す図。
【図3】内部に液体が残っているボトルをカメラにて撮影した画像の一例を示す図。
【図4】ボトルの底部に異物が付着しているときの画像を模式的に示した図。
【図5】画像解析部がボトルを検査するために実施するボトル検査ルーチンを示すフローチャート。
【符号の説明】
【0031】
1 ボトル検査機(残液検査装置)
2 ボトル
2a ボトルの底部
2b ボトルの口部
2c ボトルの胴部
3 検査機本体
4 ピッチ割り装置(搬送手段、加振手段)
11 第1胴検査部
12 底検査部
13 第2胴検査部
14 本体内搬送機構(搬送手段、胴部支持搬送機構)
20 照明器(照明手段)
21 カメラ(撮像手段)
23 演算部(判別手段)
【技術分野】
【0001】
本発明は、ボトル内における残液の有無を判別する装置に関する。
【背景技術】
【0002】
飲料容器等として使用されるボトルに内容物を充填する場合、ボトル内に液体が残っていると充填後の液量が増え、あるいは内容物の品質が変化する不都合がある。そこで、内容物の充填に先立って、ボトル内に液体が残っていないか否かを判別する残液検査が行われることがある。従来の残液検査としては、高周波あるいはレーザ光を利用して水分を検知するセンサにて残液(ボトル内に残された液体)の有無を判別している。なお、液中に沈降している異物の有無を検査する装置としては、ボトルの側方からレーザ光を照射して底部を撮像し、得られた画像から異物の有無を判別する装置が知られている(例えば特許文献1参照)。
【特許文献1】特開平5−79999号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
水検知用のセンサは用途が限られた特殊なセンサであり、その設置に際しては特別なガイド、ハンドリングが必要となる。検出対象の液種、ボトルの変更等に応じて位置調整、あるいは感度調整が必要不可欠で取り扱いにも手間がかかる。さらに油分等は検出できないことがある。
【0004】
そこで、本発明は、特殊な水検知センサに依存することなく、ボトル内の残液の有無を判別することが可能な残液検査装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の残液検査装置は、ボトル(2)を揺する加振手段(4、14)と、前記加振手段にて揺すられたボトルの底部(2a)を口部(2b)から覗き込むようにして撮像する撮像手段(21)と、取得された前記底部の像内における明暗の分布に基づいて、前記ボトルの残液の有無を判別する判別手段(23)と、を備えることにより、上述した課題を解決する。
【0006】
本発明の残液検査装置によれば、加振手段でボトルを揺すっているので、ボトル内に液体が残っている場合にはその残液も揺すられて液面が泡立つ。泡が生じているボトルの底部を口部から覗き込むように撮像した場合、得られた底部の画像には泡の影響で明度が変化した箇所が出現する。残液の泡は、底部内において適度な広がりをもった範囲内で多数発生するから、泡の影響で明度が変化する箇所の分布状況もその泡の分布に対応した特徴を呈する。一方、ボトルの底部に異物、傷といった欠陥が存在する場合にもその欠陥箇所で画像内に明度の変化が生じるが、欠陥は底部の特定箇所に偏って出現することが通例であって、その個数も少ない。つまり、液体が残っているボトルを揺すってからその底部を撮像した場合、その画像には泡の分布に対応した特徴的な明暗の分布が現れる。その特徴の有無を判別手段にて検査することにより、残液の有無を判別することが可能となる。ボトル検査において多用されている画像処理装置の技術を利用して残液検査を実施することにより、水検知用の特殊なセンサを必須とせず、また、油分等であっても、ボトルを揺すって泡立てることができる液体である限り、その存在を検出することができる。
【0007】
本発明の残液検査装置の一形態において、前記判別手段は、正常な底部を撮像したときの基準明度とは異なる異常明度を示す箇所を前記底部の像内にて検出し、その異常明度を示す箇所の前記像内における分布状況に基づいて、前記残液の有無を判別してもよい。この形態によれば、異常明度の箇所が検出された場合に、これを残液の泡に対応する箇所と仮定し、その異常明度の箇所が泡の分布に対応する分布を示しているか否かを判断することにより、残液の有無を判別することができる。
【0008】
上記の形態において、前記判別手段は、前記底部の像を複数の領域(A1〜A3)に区分し、前記異常明度を示す箇所が所定数以上検出された領域が少なくとも一つ存在する場合に前記残液が存在すると判別してもよい。異常明度の箇所が泡に対応するものであれば、その泡が存在する領域においてある程度まとまった個数の異常明度箇所が検出され、異物等の欠陥であれば、異常明度の箇所が検出されてもその個数は泡の場合よりも十分に少ない蓋然性が高い。よって、本形態によれば、残液の存在を、欠陥が存在する場合とは区別して比較的高精度に判別することができる。
【0009】
さらに、前記判別手段は、前記複数の領域の全てにおいて前記異常明度を示す箇所の検出数が前記所定数未満であり、かつ前記箇所が前記所定数未満の範囲内で検出された領域が少なくとも一つ存在する場合に、前記底部に欠陥が存在すると判別してもよい。この形態によれば、同一の撮像手段を利用してボトルの残液の有無と、異物、傷等の欠陥とを区別して検出することができる。これにより、残液検査装置を欠陥検査装置としても兼用させることができる。言い換えれば、残液存在時に固有の明暗分布の有無を判別する機能を既存の欠陥検査装置に追加することにより、本発明の残液検査装置を実現することができる。
【0010】
本発明の残液検査装置では、前記ボトルを揺すりつつ搬送する搬送手段(4、14)を前記加振手段として利用してもよい。これにより、加振手段を容易に実現することができる。
【0011】
前記搬送手段は、順次搬入される複数のボトルのピッチを拡大させつつ送り出すピッチ割り装置(4)を含んでいてもよい。ピッチ割り装置は、ボトルを検査に適したピッチで整列させて搬入する手段として検査装置の搬入側に付帯設備として設置されることが多い。そのピッチ割り装置では、ボトルが加速されてピッチが強制的に整えられ、その過程でボトルが比較的強く揺すられる。その揺れを利用してボトル内の残液を十分に泡立たせることにより、残液の検査精度をさらに高めるとともに、検査装置の付帯設備であるピッチ割り装置を加振手段の少なくとも一部として有効に活用することができる。
【0012】
前記搬送手段は、ボトルの胴部を挟み込んで支持し、かつボトルの底部側及び口部側は開放した状態で前記ボトルを搬送する胴部支持搬送機構(14)を含んでおり、前記胴部支持搬送機構の下方には、前記ボトルを底部側から照明する照明手段(20)が設けられ、前記撮像手段は、前記照明手段にて照明されたボトルの底部をその口部側から覗き込むようにして撮像してもよい。ボトルを底部側から照明しつつ口部側から覗き込むようにして底部を撮像する構成は、底部の欠陥検査等を目的とする検査装置にて採用されている構成である。その構成を流用することにより、本発明の残液検査装置をより容易に実現することができる。
【0013】
なお、以上の説明では本発明の理解を容易にするために添付図面の参照符号を括弧書きにて付記したが、それにより本発明が図示の形態に限定されるものではない。
【発明の効果】
【0014】
以上に説明したように、本発明によれば、ボトルを揺すった上でその底部を口部から覗き込むように撮像し、得られた画像内の明暗の分布に基づいて残液の有無を判別するようにしたので、水検知用の特殊なセンサを必須とすることなく、ボトル検査において多用されている画像処理装置の技術を利用して残液の有無を判別することが可能となる。また、油分等であっても、ボトルを揺すって泡立てることができる液体である限り、その存在を検出することができる利点もある。
【発明を実施するための最良の形態】
【0015】
図1は本発明に係る残液検査装置の一形態として構成されたボトル検査機を示している。ボトル検査機1は、ボトル2の検査を実行する検査機本体3と、その検査機本体3に対して検査対象のボトル2を適切なピッチで1本ずつ送り出すピッチ割り装置4とを備えている。検査対象のボトル2は、不図示の洗浄機で洗浄され、かつ飲料物等の内容物が充填される前の状態であり、その口部は王冠等の栓によって封印されることなく開封されている。
【0016】
ピッチ割り装置4は、第1コンベア5と、第2コンベア6と、それらのコンベア5、6の間でボトル2を移送する移送機構7とを備えている。コンベア5、6は、ボトル2を水平な搬送面に乗せて直線的に搬送するトップチェーン式のコンベアであって、それらの搬送方向は互いに一致している。洗浄済のボトル2は、その口部を上方に向けた状態で第1コンベア5に対して図中の矢印F方向に1本ずつ順次搬入される。第2コンベア6の搬送速度は、第1コンベア5のそれよりも高く設定されている。移送機構7は、コンベア5、6によるボトル2の搬送経路を左右から挟むように配置された一対のベルト7a、7bを有している。ベルト7a、7bはコンベア5、6の搬送方向(矢印F方向)と同一方向に走行駆動される。第1コンベア5の終端部まで搬送されたボトル2の胴部がベルト7a、7b間に挟み込まれ、そのボトル2がベルト7a、7bの走行に伴って第2コンベア6へと移送されることにより、ボトル2が加速されてボトル2間のピッチ(搬送方向の間隔)が検査に適した値まで広げられる。第2コンベア6に移送されたボトル2はその第2コンベア6によって検査機本体3に搬入される。なお、第2コンベア6は検査機本体3の内部に幾らか入り込んでいる。
【0017】
検査機本体3には、第1の胴検査部11と、底検査部12と、第2の胴検査部13と、本体内搬送機構14とが設けられている。第1の胴検査部11は、第2コンベア6によって搬送されるボトル2の胴部の半周を側方から撮影して、異物付着等の欠陥の有無を判別する。底検査部12は、本体内搬送機構14にて搬送されるボトル2の底部の画像を取得して底部に関する所定の検査を実行する。底検査部12の詳細は後述する。第2の胴検査部13は、第3コンベア15によって搬送されるボトル2の胴部の残りの半周を側方から撮影して欠陥の有無を判別する。第3コンベア15は、第1コンベア5及び第2コンベア6と同一方向にボトル2を直線的に搬送するように設けられている。第3コンベア15の搬送速度は第2コンベア6のそれと等しい。第3コンベア15は検査機本体3の下流側まで延ばされて不図示のアキューム装置までボトル2を搬送する。アキューム装置のさらに下流には、ボトル2に内容物(飲料)を充填する内容物充填装置が配置される。
【0018】
本体内搬送機構14は、第2コンベア6から第3コンベア15へとボトル2を搬送する。その本体内搬送機構14は、コンベア6、15によるボトル2の搬送経路を左右から挟むように配置された一対のベルト14a、14bを有している。ベルト14a、14bは、コンベア6、15によるボトル2の搬送方向と同一方向にコンベア6、15と同一速度で走行駆動される。第2コンベア6の終端部まで搬送されたボトル2の胴部がベルト14a、14b間に挟み込まれ、そのボトル2がベルト14a、14bの走行に伴って第3コンベア15へと移送される。ベルト14a、14bによる搬送区間においては、ボトル2の底部側及び口部側には支持手段が設けられていない。つまり、第2コンベア6と第3コンベア15との間において、ボトル2はその胴部2c(図2参照)がベルト14a、14b間に挟み込まれて支持された状態で搬送され、底部側の下方及び口部の上方は開放されたオープンスペースとなっている。これにより、本体内搬送機構14は胴部支持搬送機構として機能する。
【0019】
図2は底検査部12の構成を示している。一般に、底検査部12は、ボトル2の底部2aにおける異物の付着、傷といった欠陥の有無を検査する目的で設けられているが、本形態ではその底検査部12にてボトル2内の残液の有無も検査する。底検査部12は、ボトル2の下方に配置されてボトル2を底部2a側から上方に向かって照明する照明手段としての照明器20と、ボトル2の底部2aを口部2bから覗き込むようにして撮像する撮像手段としてのカメラ21と、カメラ21で撮像された画像信号を、検査に適したデジタル画像信号へと変換する画像処理部22と、画像処理部22で得られた画像を解析する判別手段としての演算部23とを備えている。
【0020】
照明器20はボトル2に対して所定周期でパルス光を照射する。照明器20は、一例として、多数のLEDを光源として使用するLED照明器である。パルス光が照射されたボトル2を口部2b側からカメラ21にて撮影することにより、照明されたボトル2の底部2aの静止画像を取得することができる。カメラ21は、固体撮像素子を利用してボトル2の底部2aの画像を光電変換してアナログ画像信号を出力する。画像処理部22は、カメラ21から出力される画像信号をAD変換してボトル2の底部2aの画像を所定階調(例えば256階調)のデジタル画像へと変換する。
【0021】
演算部23は、マイクロコンピュータとその動作に必要な主記憶装置等を組み合わせたコンピュータユニットとして構成され、画像処理部22から出力された画像を所定のアルゴリズムに従って検査することにより、底部2aにおける欠陥の有無、及び残液の有無を判別する。演算部23には、検査に必要な情報等をオペレータが入力するための入力部24と、撮影された画像や検査結果等をオペレータに出力するための出力部25とが接続されている。なお、照明器20からカメラ21に至る光路には偏向フィルタ等の光学要素を必要に応じて設けてもよい。ボトル2がベルト14a、14bから誤って落下した場合でも照明器20とベルト14a、14bの間にボトル2が詰まることがないように、照明器20はボトル2の底部2aから下方に十分に離して設置することが望ましい。
【0022】
次に、図3及び図4を参照して、演算部23における検査の原理を説明する。図3は、内部に液体が残っているボトル(以下、これを残液ボトルと呼ぶことがある。)2をカメラ21にて撮影した画像の一例を示している。ボトル検査機1では、ピッチ割り装置4、あるいは、本体内搬送機構14によってボトル2が搬送される間にボトル2が揺すられる。特に、ピッチ割り装置4では、移送機構7による移送過程でボトル2が加速されるため、ボトル2が比較的強く揺すられる。このため、ボトル2内に液体が残されている場合、その残液も揺すられて液面が泡立ち、その泡立った液面の画像がカメラ21にて撮影される。図3に示す画像においては、白色部分が液面であり、その液面中に点在する粒状部分が泡の像である。なお、白色部分よりも外側はボトル2の胴部2c又はそれよりも外側の領域に相当する。
【0023】
一方、図4はボトル2の内部に残液がなく、かつ底部(但し、内面側)2aに異物30が付着しているときの画像を模式的に示している。この場合、ボトル2の底部2aはほぼ一様な明度で撮影され、異物30の明度は周囲の明度を基準明度としたときに、その基準明度と比して明確に相違する。異物30に代えて底部2aに傷等が存在する場合も同様である。なお、基準明度とは、欠陥も残液もない正常なボトル2の底部2aを撮像したときの底部2aの像の明るさを代表する明度である。画像中の泡と欠陥とは、いずれも周囲の基準明度と比較して明るさが明確に異なる箇所(以下、その箇所を異常明度箇所と呼ぶ。)として検出することが可能であるが、そのような検出ロジックだけでは欠陥と泡との区別が困難となるおそれがある。ところが、図3と図4との比較から明らかなように、残液ボトル2の画像では、異常明度箇所(つまり泡)が適度な広がりを有する範囲内にて満遍なく散らばっているのに対して、欠陥に関しては底部2a内の多くても数ヶ所程度にとどまる。そこで、異常明度箇所の分布状況を参照すれば残液又は欠陥を区別することができる。本形態では、図4に示したように、ボトル2の底部の画像を半径方向に関して複数の領域A1〜An(図示例ではn=3)に区分し、いずれかの領域で異常明度箇所がある程度まとまった個数以上検出された場合にボトル2に液体が残っていると判別し、一部の領域で異常明度箇所が検出されていても、その検出数が少ない場合にはボトル2に欠陥が存在すると判別する。なお、図4から明らかなように、本形態では、底部の画像上において円形のライトゲートLGを設定して、検査に適しないボトル2を識別するための補充的な検査を併せて実施するが、この点は後述する。
【0024】
図5は、演算部23が上述した原理に基づいてボトル2を検査するために実施するボトル検査ルーチンを示している。このボトル検査ルーチンは、ボトル2の画像が演算部23に取り込まれる毎に実施される。図5のボトル検査ルーチンにおいて、演算部23は、まずステップS1で画像に対して円形のライトゲートLGを設定し、そのライトゲートLGを円周方向に等分する複数(一例として32個)の検出点のそれぞれにおける画素の明度(階調値)B1〜Bnが取得される。ライトゲートLGは、ボトル2の底部2aが、異物等の欠陥が存在しない正常な状態のときに、照明光に対する透過率が周方向に概ね均一となるような領域に設定すればよい。一例として底部2aの直径の1/3程度の位置に設定される。
【0025】
続いて、演算部23はステップS2で明度B1〜Bnの平均値Bmを算出し、次のステップS3で明度平均値Bmが所定の下限値Bminと上限値Bmaxとの間にあるか否か判断する。下限値Bmin及び上限値Bmaxは、ボトル2の内部にセメント等の異物が全面的に詰まっている等の理由により底部2aの画像の全体が暗い場合、及び、ボトル2の底部2aが抜けていて画像の全体が明るい場合に、それらのボトル2を検出対象から除外する目的で設定される閾値である。例えば底部2aの画像において、算出された明度平均値Bmが下限値Bminより小さい場合には異物が全面的に詰まっていると識別し、一方、明度平均値Bmが上限値Bmaxより大きい場合には底部2aが抜けているボトルとして識別することができる。
【0026】
ステップS3で明度平均値Bmが下限値Bminよりも低い、又は上限値Bmaxよりも高い場合、演算部23はステップS4に進み、撮影されたボトル2が検出対象外のボトルであると識別して検査ルーチンを終える。一方、ステップS3にて明度平均値Bmが下限値Bminと上限値Bmaxとの間にあった場合、演算部23はステップS5に進み、ボトル2の底部2aの画像に設定される領域A1〜An(図4参照)から、検査対象の一つの領域Axを選択する。続くステップS6で、演算部23は、検査対象の領域Axの画素の明度を検査して、欠陥又は泡に相当する異常明度箇所の検出数を記憶する。異常明度箇所を検出するためのロジックは、底部の異物、傷等の欠陥を検出するために使用される公知の検査装置と同様でよい。次のステップS7において、演算部23は、全ての領域A1〜Anに関してステップS6の検査が終了したか否か判断する。まだ検査していない領域が存在する場合、演算部23はステップS5へ戻って未検査の領域を新たに検査対象の領域Axとして選択して以降の処理を繰り返す。
【0027】
ステップS7で全ての領域A1〜Anの検査が終了したと判断された場合、演算部23はステップS8へ進み、いずれかの領域にて異常明度箇所が所定数X以上検出されたか否か判断する。検出数Xは、異常明度箇所が泡に相当する場合と、欠陥に相当する場合とを区別できる閾値として設定される。ステップS8が肯定判断された場合、演算部23はステップS9に進み、検査対象のボトル2が残液ボトルであると判別して検査ルーチンを終える。一方、ステップS8が否定判断された場合、すなわち全ての領域で異常明度箇所の検出数がX未満と判断された場合、演算部23はステップS10へ進み、全領域で異常明度箇所が検出されていない(つまり検出数=0)か否か判断する。ステップS10が肯定判断された場合、演算部23はステップS11に進み、検査対象のボトル2が残液も欠陥もない正常なボトルであると判別して検査ルーチンを終える。一方、ステップS10が否定判断された場合、すなわち、少なくとも一つの領域で異常明度箇所がX未満の個数だけ検出されている場合、演算部23はステップS12へ進み、底部2aに異物30の付着といった欠陥が存在すると判別して検査ルーチンを終える。
【0028】
ステップS4で検出対象外として判別され、ステップS9で残液ボトルと判別され、あるいはステップS12で底部2aに欠陥があると判別されたボトル2は、第3コンベア15によって検査機本体3から搬出された後、正常なボトル2の搬送経路から排除される。第1胴検査部11、又は第2胴検査部13にて胴部2cに欠陥が存在すると判別されたボトル2も同様である。各検査部11〜13にて正常と判別されたボトル2は検査機1を通過して後続する内容物充填工程へと送り出される。ボトル2の検査結果と、検査機1から搬出されるボトル2との対応関係は、ボトル2の搬出速度と検査時からの経過時間とから特定すればよい。
【0029】
本発明は上述した形態に限定されることなく、種々の形態にて実施してよい。例えば、本発明は、欠陥の有無を判別せず、残液の有無のみを判別する残液検査装置として構成されてもよい。図4では底部を3つの領域に区分する例を示したが、その区分数は適宜に変更してもよい。本発明は、底部を複数領域に区別することを必ずしも要しない。底部の画像における明暗の分布に基づいて残液の有無を判別する限りにおいて、本発明は、適宜の変更が可能である。例えば、泡が底部に適度な密度で存在することから、泡に相当する可能性のある明度変化箇所(上記の形態では異常明度箇所)の密度、重心位置等を特定し、それらを手掛かりとして残液の有無を判別してもよい。上記の形態では、搬送手段としてのピッチ割り装置4及び本体内搬送機構(胴部支持搬送機構)14を加振手段として利用しているが、これに限らず、ボトル2内の残液を泡立てることができる程度にボトル2を揺することができるものであれば、加振手段として適宜に利用してよい。例えば、ボトル2の搬送経路の途中に加振器を設置してボトル2を揺すってもよい。
【図面の簡単な説明】
【0030】
【図1】本発明に係る残液検査装置の一形態として構成されたボトル検査機を示す平面図。
【図2】底検査部の構成を示す図。
【図3】内部に液体が残っているボトルをカメラにて撮影した画像の一例を示す図。
【図4】ボトルの底部に異物が付着しているときの画像を模式的に示した図。
【図5】画像解析部がボトルを検査するために実施するボトル検査ルーチンを示すフローチャート。
【符号の説明】
【0031】
1 ボトル検査機(残液検査装置)
2 ボトル
2a ボトルの底部
2b ボトルの口部
2c ボトルの胴部
3 検査機本体
4 ピッチ割り装置(搬送手段、加振手段)
11 第1胴検査部
12 底検査部
13 第2胴検査部
14 本体内搬送機構(搬送手段、胴部支持搬送機構)
20 照明器(照明手段)
21 カメラ(撮像手段)
23 演算部(判別手段)
【特許請求の範囲】
【請求項1】
ボトルを揺する加振手段と、
前記加振手段にて揺すられたボトルの底部を口部から覗き込むようにして撮像する撮像手段と、
取得された前記底部の像内における明暗の分布に基づいて、前記ボトルの残液の有無を判別する判別手段と、
を備えたことを特徴とするボトルの残液検査装置。
【請求項2】
前記判別手段は、正常な底部を撮像したときの基準明度とは異なる異常明度を示す箇所を前記底部の像内にて検出し、その異常明度を示す箇所の前記像内における分布状況に基づいて、前記残液の有無を判別することを特徴とする請求項1に記載の残液検査装置。
【請求項3】
前記判別手段は、前記底部の像を複数の領域に区分し、前記異常明度を示す箇所が所定数以上検出された領域が少なくとも一つ存在する場合に前記残液が存在すると判別することを特徴とする請求項2に記載の残液検査装置。
【請求項4】
前記判別手段は、前記複数の領域の全てにおいて前記異常明度を示す箇所の検出数が前記所定数未満であり、かつ前記箇所が前記所定数未満の範囲内で検出された領域が少なくとも一つ存在する場合に、前記底部に欠陥が存在すると判別することを特徴とする請求項3に記載の残液検査装置。
【請求項5】
前記ボトルを揺すりつつ搬送する搬送手段を前記加振手段として利用することを特徴とする請求項1〜4のいずれか一項に記載の残液検査装置。
【請求項6】
前記搬送手段は、順次搬入される複数のボトルのピッチを拡大させつつ送り出すピッチ割り装置を含んでいることを特徴とする請求項5に記載の残液検査装置。
【請求項7】
前記搬送手段は、ボトルの胴部を挟み込んで支持し、かつボトルの底部側及び口部側は開放した状態で前記ボトルを搬送する胴部支持搬送機構を含んでおり、前記胴部支持搬送機構の下方には、前記ボトルを底部側から照明する照明手段が設けられ、前記撮像手段は、前記照明手段にて照明されたボトルの底部をその口部側から覗き込むようにして撮像する、ことを特徴とする請求項5又は6に記載の残液検査装置。
【請求項1】
ボトルを揺する加振手段と、
前記加振手段にて揺すられたボトルの底部を口部から覗き込むようにして撮像する撮像手段と、
取得された前記底部の像内における明暗の分布に基づいて、前記ボトルの残液の有無を判別する判別手段と、
を備えたことを特徴とするボトルの残液検査装置。
【請求項2】
前記判別手段は、正常な底部を撮像したときの基準明度とは異なる異常明度を示す箇所を前記底部の像内にて検出し、その異常明度を示す箇所の前記像内における分布状況に基づいて、前記残液の有無を判別することを特徴とする請求項1に記載の残液検査装置。
【請求項3】
前記判別手段は、前記底部の像を複数の領域に区分し、前記異常明度を示す箇所が所定数以上検出された領域が少なくとも一つ存在する場合に前記残液が存在すると判別することを特徴とする請求項2に記載の残液検査装置。
【請求項4】
前記判別手段は、前記複数の領域の全てにおいて前記異常明度を示す箇所の検出数が前記所定数未満であり、かつ前記箇所が前記所定数未満の範囲内で検出された領域が少なくとも一つ存在する場合に、前記底部に欠陥が存在すると判別することを特徴とする請求項3に記載の残液検査装置。
【請求項5】
前記ボトルを揺すりつつ搬送する搬送手段を前記加振手段として利用することを特徴とする請求項1〜4のいずれか一項に記載の残液検査装置。
【請求項6】
前記搬送手段は、順次搬入される複数のボトルのピッチを拡大させつつ送り出すピッチ割り装置を含んでいることを特徴とする請求項5に記載の残液検査装置。
【請求項7】
前記搬送手段は、ボトルの胴部を挟み込んで支持し、かつボトルの底部側及び口部側は開放した状態で前記ボトルを搬送する胴部支持搬送機構を含んでおり、前記胴部支持搬送機構の下方には、前記ボトルを底部側から照明する照明手段が設けられ、前記撮像手段は、前記照明手段にて照明されたボトルの底部をその口部側から覗き込むようにして撮像する、ことを特徴とする請求項5又は6に記載の残液検査装置。
【図1】


【図2】
【図4】
【図5】
【図3】
【図2】
【図4】
【図5】
【図3】
【公開番号】特開2009−115580(P2009−115580A)
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2007−288203(P2007−288203)
【出願日】平成19年11月6日(2007.11.6)
【出願人】(390014661)キリンテクノシステム株式会社 (126)
【Fターム(参考)】
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成19年11月6日(2007.11.6)
【出願人】(390014661)キリンテクノシステム株式会社 (126)
【Fターム(参考)】
[ Back to top ]