
ポインティングデバイス
【課題】足への負担が少なくすることにより長時間の操作を可能とし、構造的にも簡単とする。
【解決手段】操作者の足を載置するペダル部1aと、前記ペダル部を傾斜可能に支持するとともに、前記ペダル部からの荷重を下方に伝える円周状突起5cを有するラバードーム部5と、円周状に設けた複数の固定接点パターン35を有する第1のプリント基板3と、前記第1のプリント基板3の複数の固定接点パターン35に対向し、かつ円周状突起5cの下方に設けられた可動接点パターン45を有する第2のプリント基板4と、前記第1のプリント基板3の固定接点パターン35と前記第2のプリント基板の可動接点パターン45を含んで構成されるメンブレンスィッチと、メンブレンスィッチが閉じたことを検知することによって、カーソル移動方向情報を上位装置へ送信する。
【解決手段】操作者の足を載置するペダル部1aと、前記ペダル部を傾斜可能に支持するとともに、前記ペダル部からの荷重を下方に伝える円周状突起5cを有するラバードーム部5と、円周状に設けた複数の固定接点パターン35を有する第1のプリント基板3と、前記第1のプリント基板3の複数の固定接点パターン35に対向し、かつ円周状突起5cの下方に設けられた可動接点パターン45を有する第2のプリント基板4と、前記第1のプリント基板3の固定接点パターン35と前記第2のプリント基板の可動接点パターン45を含んで構成されるメンブレンスィッチと、メンブレンスィッチが閉じたことを検知することによって、カーソル移動方向情報を上位装置へ送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パーソナルコンピュータ等の表示装置の画面上におけるカーソル移動やクリック動作を足の動きによって行うポインティングデバイスに関する。
【背景技術】
【0002】
従来、パーソナルコンピュータを操作する場合、手の不自由な操作者が操作する必要性からポインティングデバイスとしてのマウスを足で操作する技術が知られている。特開平10−97374号公報(特許文献1)には、足を乗せる移動部と、移動部を保持しかつ前後左右に移動させるためのベースで構成される足用ポインティングデバイスが記載されている。特許文献1の足用ポインティングデバイスの実際の動作は、パソコンの画面のカーソルを画面上方に移動させる場合、足を床面に平行にかつ前方に移動させる。そして、カーソルを画面下方に移動させる場合、足を後方に移動させ、カーソルを画面左右に移動させる場合は、足を左右に移動させるものである。
【0003】
一方、特開平8−179879号公報(特許文献2)には、操作者の足を載置するための載置部の傾き方向を検出する傾斜方向検出手段と、載置部の傾き量を検出する傾き量検出手段を設け、この検出結果に応じてカーソル移動信号を送出するようにしたポインティングデバイスが記載されている。特許文献2記載の技術では、ボタンスィッチが押される深さは足を載置するプレートの傾き量に応じて変化する。そして、プレートの傾き量を検出するために、制御線A1,B1,C1のいずれかが信号線Sと電気的に接続することにより行われる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−97374号公報
【特許文献2】特開平8−179879号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1記載の技術では、カーソルを移動させたい方向に足置き部をずらす足動作が必要であり、腿(もも)から下側を動かすため、長時間の操作には不向きと考えられる。更に、床上に置かれて動かないベース部とその上に足の動きに従って動く移動部から成るため、機構的にも複雑な構造が要求される。更に、床面に設置されることから、防塵、防水構造が必要であり、長期の使用に耐えるため可動部の定期的な保守が必要であるという問題点があった。
【0006】
特許文献2記載の技術において、傾き量を検出するための制御線A1,B1,C1は、信号線Sの移動方向に沿って、即ち装置の縦方向に設けられている。そのため特許文献2記載の技術では、装置が大型化するという問題点がある。
【0007】
本発明が解決しようとする課題は、足への負担を少なくすることにより長時間の操作を可能とし、構造的にも簡単でかつ長期の使用に耐えることができ、更に装置を薄型化することができるポインティングデバイスを提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するために、特許請求の範囲の請求項1に記載の発明は、外部からの荷重を受けるペダル部と、前記ペダル部を傾斜可能に支持するとともに、前記ペダル部からの荷重を下方に伝える円周状突起を有するラバードーム部と、円周状に設けた複数の固定接点を有する第1のプリント基板と、前記第1のプリント基板の前記複数の固定接点に対向し、かつ前記円周状突起の下方に設けられた可動接点を有する第2のプリント基板と、前記第1のプリント基板の前記固定接点と前記第2のプリント基板の前記可動接点を含んで構成されるメンブレンスィッチと、前記メンブレンスィッチが閉じたことを検知することによって、カーソル移動方向情報を上位装置へ送信する制御部を有することを特徴とするポインティングデバイスである。
【発明の効果】
【0009】
本発明によれば、物理的に動作量の少ないメンブレンスィッチを用いたので、足の移動量を少なくでき、足の踝(くるぶし)から下を傾けることで操作できる。従って、操作性の良いポインティングデバイスを提供することができる。更に、固定接点と可動接点とをメンブレンスィッチで構成することとしたので、構造的にも簡単でかつ長期の使用に耐えることができ、更に薄型化したポインティングデバイスを得ることができる。
【図面の簡単な説明】
【0010】
【図1】第1の実施の形態に関わるポインティングデバイスの構造を示す分解斜視図である。
【図2】第1の実施の形態に関わるポインティングデバイスの外観図である。
【図3】第1の実施の形態に関わるポインティングデバイスの縦断面図である。
【図4】第1の実施の形態に関わるメンブレンスィッチ群の要部説明図である。
【図5】第1の実施の形態に関わるメンブレンスィッチ群の接点パターンを示す説明図である。
【図6】第1の実施の形態に関わるポインティングデバイスの信号発生手段を示す回路図である。
【図7】第1の実施の形態に関わるポインティングデバイスの動作状態を示す断面説明図である。
【図8】第1の実施の形態に関わるポインティングデバイスの操作例を示す説明図である。
【図9】第1の実施の形態に関わるメンブレンスィッチ群の押下方向の割振りを示す説明図である。
【図10】第1の実施の形態に関わるCPU10の機能を示すブロック図である。
【図11】第1の実施の形態に関わるポインティングデバイスの動作フローチャートである。
【図12】第1の実施の形態に関わるポインティングデバイスの加速度を示す説明図である。
【図13】第1の実施の形態の変形例1及び2に関わる押下方向を示す説明図である。
【図14】第1の実施の形態の変形例1に関わる移動方向の判定を示す説明図である。
【図15】第2の実施の形態に関わるポインティングデバイスの動作状態を示す断面説明図である。
【図16】第3の実施の形態に関わるポインティングデバイスを示す断面説明図である。
【図17】第4の実施の形態に関わるポインティングデバイスを示す断面説明図である。
【発明を実施するための形態】
【0011】
(第1の実施の形態)
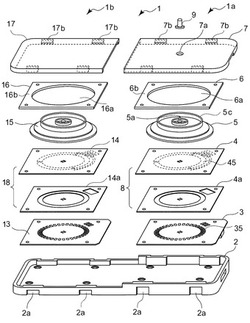
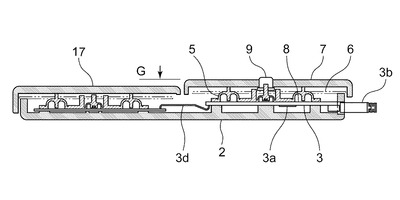
以下、本発明の第1の実施の形態を図面に従って説明する。図1は第1の実施の形態に関わるポインティングデバイスの構造を示す分解斜視図であり、図2は第1の実施の形態に関わるポインティングデバイスの外観図であり、図3は第1の実施の形態に関わるポインティングデバイスの縦断面図である。
【0012】
図2において、第1の実施の形態に関わるポインティングデバイス1は操作者の足を乗せて操作するため、長方形を成している。ポインティングデバイス1は第1の載足部1aと第2の載足部1bからなる。第1の載足部1aは、操作者の足先部位を載せる前ペダル7を有し、第2の載足部1bは、操作者の踵(かかと)部位を載せる後方ペダル17を有する。第1の載足部1aには、後述するホームポジションキートップ9が設けられている。前ペダル7と後方ペダル17は外部からの荷重を受けるペダル部として機能する。
【0013】
ポインティングデバイス1は床面に配置され、後述する上位装置としてのパーソナルコンピュータ(以下、上位装置PCという)の表示装置の画面上のカーソルを所定の方向に移動させるために、上位装置PCのマウスコネクタに上位接続ケーブル3bを介して接続されるものである。なお、カーソルとは、上位装置PCの表示装置の画面上で入力位置を示す下線や記号又は画面を移動する矢印のことである。以下、ポインティングデバイス1を構成する各部を説明する。
【0014】
図1及び図3において、2はロワーカバーであり、裏面が床面と接する部位であり樹脂成型等によって製作されている。3は第1の載足部1aの基材としての第1のプリント基板であり、第1のプリント基板3の上面には放射状かつ円周状に複数の接点からなる固定接点パターン35が印刷により設けられている。固定接点パターン35は、後述するラバードーム5の円周状突起5cに対応して設けられる。そして、図3に示すように第1のプリント基板3の下面には制御回路部3aが設けられ、上位装置PCとの電気的接続部である上位接続ケーブル3bが接続されている。
【0015】
8は第1の載足部1aのメンブレン(Membrane)シートであって、メンブレンとしての第2のプリント基板4と、第2のプリント基板4の下面に設けられたメンブレンスペーサ4aとによって構成されている。第2のプリント基板4の下面には、第1のプリント基板3の固定接点パターン35と対向する可動接点パターン45が印刷により設けられ、メンブレンスペーサ4aも印刷により設けられている。即ち、メンブレンスペーサ4aは、第1プリント基板3と第2のプリント基板4の間に配置され、固定接点パターン35と可動接点パターン45の部分に穴のあいた絶縁シートとして構成される。また、メンブレンシート8はフィルム製であって、荷重により撓む構成である。
【0016】
5はメンブレンシート8の上側に設けられた第1の載足部1aのラバードームであって、絶縁性弾性部材(主にゴム)で形成される。ラバードーム5は、単に足を載せた状態では座屈しない程度の硬度を有している。意図的な荷重を受けたラバードーム5が撓むと、ラバードーム5はメンブレンシート8へ荷重を掛ける。これにより、メンブレンシート8が撓むと、第1のプリント基板3の接点と第2のプリント基板4接点からなる後述するメンブレンスイッチが閉じる仕組みとなっている。そして荷重が無くなると、弾性部材としてのラバードーム5の復元力により両接点が離れる。ここで接点が閉じた場合には電気的導通がなされ、制御回路部3aに検出されることになる。なお、接点が閉じ、又は解放されることからスィッチとなるため、以後この部位をメンブレンスイッチSWと称する。
【0017】
6はラバードーム5の位置を規制する第1の載足部1aのラバー押えである。このラバー押え6は,その内側を挟まない逃げ穴6aが設けてあり、更に、ラバードーム5の外淵のみを押える固定部6bが設けてある。固定部6bにより、ロワーカバー2との間で第1のプリント基板3、メンブレンシート8、ラバードーム5を図示しないネジ等の固定手段で固定する。
【0018】
第1の載足部1aの前ペダル7はプラスチック材料などで成形され、前述の通り操作者の足先部位を載せる部分である。なお、前ペダル7は抗菌材料で成形又は抗菌表面処理を施してある。前ペダル7はラバードーム5の円周状突起5cによって支持されている。
【0019】
前ペダル7には、中央に小穴7aが設けられ、その小穴7aよりホームポジションキートップ9が突出していている。このホームポジションキートップ9はラバードーム5の中央部に設けられた後述する中央突起5a及び下側中央突起5bに対応して配置されている。そして、中央突起5a及び下側中央突起5bは、放射状かつ円周状のメンブレンスィッチSWの中央部に配した後述する電気的接点と対応している。この電気接点は、ホームポジション接点SW0を構成する。なお、復元力は弾性部材としてのラバードーム5によることは前述のメンブレンスィッチSWと同様である。ホームポジションキートップ9は基本的な役割として、上位装置PC側において操作対象や領域の指定に伴う基本動作を行うためのものである。
【0020】
第2の載足部1bも図示するように、表面には放射状かつ円周状に固定接点パターン35が設けられている第1の後方プリント基板13を有する。第1の後方プリント基板13には、前述の第1のプリント基板3と同様にメンブレンスィッチSWが構成される。更に第1のプリント基板3とケーブル3dにより電気的に接続されている。
【0021】
更に、第2の載足部1bは、前述の第1の載足部1aと同様に、第2の後方プリント基板14と後方メンブレンスペーサ14aからなる後方メンブレンシート18、後方ラバードーム15、後方ラバー押え16及び後方ペダル17とを有する。後方ペダル17は、前ペダル7と同様にプラスチック材料などで成形され、操作者の踵を載せる部分である。第2の載足部1bは、ホームポジションキートップ9を有しない点以外は前述の第1の載足部1aと同様の構成であるので、説明を省略する。第2の載足部1bは、第1の載足部1aとほぼ同様の構造であるので、特別な構造変更をすることなく、ポインティングデバイスとしてのマウスの左右クリックに相当する信号を送信することができる。
【0022】
2aはロワーカバー2の側壁に設けられた凹部であり、本実施の形態では左右に計8個設けてある。7b及び17bは前ペダル7及び後方ペダル17の内壁に設けた凸部であって、ロワーカバー2に設けた凹部2aと嵌合させてある。なお、前ペダル7及び後方ペダル17は、図示しない手段によって、凹部2aの一部分をガイドとしてそれぞれ独立して上下動可能に構成されると共に抜け落ちないよう構成されている。
【0023】
第1の載足部1aと第2の載足部1bは図3に示すように、段差Gが設けられている。これは、操作者の足の骨格の特徴を考慮したもので、第2の載足部1b側、即ち、踵を載せる位置を低くすることで、自然体のまま足を載せるだけでペダル操作ができるようになっている。これにより長時間操作をしても疲れにくいという効果がある。
【0024】
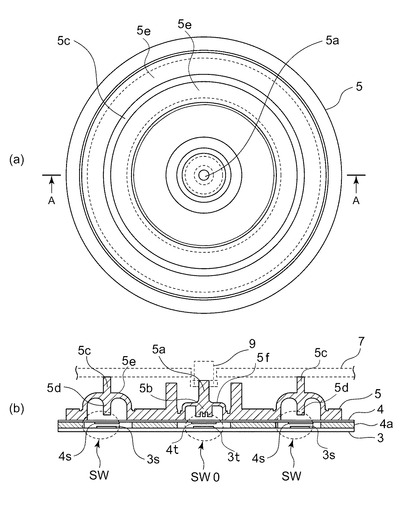
図4は第1の実施の形態に関わるメンブレンスィッチ群の要部説明図である。図4(a)はラバードーム5を示す平面図である。ラバードーム5は中央に設けた中央突起5aと、円周状に連続した円周状突起5cを有する。そして、ラバードーム5は、円周状突起5cにより前ペダル7を傾斜可能に支持する。
【0025】
図4(b)は図4(a)に示すAA矢視断面図である。円周状突起5cは断面がドーム状である連続したドーム部5eによりラバードーム5の本体から支持されて形成されている。円周状突起5cの下側は、円周状突起5cと一体化している下側円周状突起5dが設けられている。前ペダル7が押下されると、ドーム部5eが撓むことにより、円周状突起5cと一体になっている下側円周状突起5dが荷重を下方に伝えることになる。下側円周状突起5dの下部には、複数のメンブレンスイッチSWが後述するように下側円周状突起5dに対応して円周状に形成されている。メンブレンスイッチSWは、第2のプリント基板4側の可動接点4sと第1のプリント基板3側の固定接点3sにより構成される。メンブレンスィッチSWを直接的に押下するのは図示するように円周状突起5cと一体化している下側円周状突起5dにより行われる。
【0026】
中央突起5aは、ホームポジションキートップ9の下部に設けられる。中央突起5aは断面がドーム状である連続した中央ドーム部5fによりラバードーム5の本体から支持されて形成されている。ホームポジションキートップ9が押下されると、中央ドーム部5fが撓むことにより、中央突起5aと一体になっている下側中央突起5bが荷重を下方に伝えることになる。下側中央突起5bの下部には、一箇所のホームポジション接点SW0が下側中央突起5bに対応して形成されている。ホームポジション接点SW0は、第2のプリント基板4側の中央可動接点4tと第1のプリント基板3側の中央固定接点3tにより構成される。ホームポジション接点SW0を直接的に押下するのは、図示するように中央突起5aと一体化している下側中央突起5bにより行われる。なお、ホームポジション接点SW0は、構造としてはメンブレンスィッチSWと同じである。
【0027】
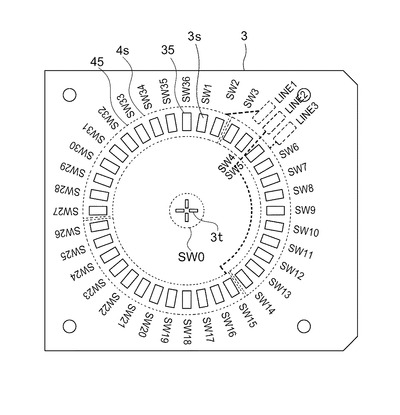
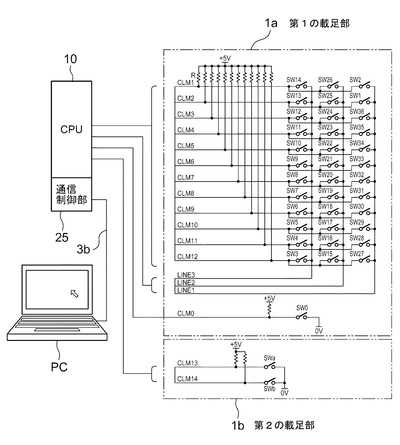
次に、接点パターンについて説明する。図5は第1の実施の形態に関わるメンブレンスィッチ群の接点パターンを示す説明図である。まず、第1のプリント基板3には、固定接点3sが放射状かつ円周状に配置されて、固定接点パターン35を形成している。固定接点パターン35は、中央部に配したホームポジション接点SW0を中心とし所定距離だけ離れた円弧状に複数の接点SW1〜SW36として設けてある。本実施の形態では角度10度毎に36分割してあり、3個のグループに対応して配置される。接点SW1〜SW36は後述する端子CLM1〜CLM12に接続される。
【0028】
同図において、第2のプリント基板4側の可動接点4sは、破線で示すように固定接点3sの3グループに対応して設けられ、可動接点パターン45を形成している。そして、可動接点パターン45は第2のプリント基板4の3個の端子LINE1、LINE2、LINE3に接続される。同図に示すように第2のプリント基板4側の端子LINE1に対応する第1のプリント基板3の接点はSW2、SW1、SW36〜SW27までの12個である。端子LINE2に対応する接点はSW26〜SW15までの12個である。そして、端子LINE3に対応する接点はSW14〜SW3までの12個が割り当てられている。
【0029】
図6は第1の実施の形態に関わるポインティングデバイスの信号発生手段を示す回路図である。同図に示す接点SW2、SW26及びSW14を第1グループとして端子CLM1に接続され、接点SW1、SW25及びSW13を第2グループとして端子CLM2に接続される。以下同様に接点SW27、SW15及びSW3までの第12グループとして端子CLM12に接続される。これらの全12グループから第1のプリント基板3側として端子CLM1〜CLM12までの12個の信号出力が可能となる。図5からも理解できるように接点SW2とSW26及びSW14は互いに角度120度ずれた位置関係である。例えば、接点SW27が閉じた場合には、第1のプリント基板3側は端子CLM12とメンブレンシート8側の端子LINE1が電気的に接続されことが制御回路部3aに検出されることになる。
【0030】
第2の載足部1bについては、接点SW28、SW29〜SW36、SW1〜SW8までの接点パターングループSWaが端子CLM13に接続される。また、接点SW10〜SW26までの接点パターングループSWbが端子CLM14に電気的に接続される。以上、制御回路3aが検出した方向情報(電気信号)はCPU10に送信される。CPU10はそれらの方向情報を通信制御部10aを介して上位装置PCに出力することになる。
【0031】
図7は第1の実施の形態に関わるポインティングデバイスの動作状態を示す断面説明図である。同図(a)はホームポジションキートップ9が荷重を受けて押下された状態を示すものである。ホームポジションキートップ9が押下されると、ラバードーム5の中央ドーム部5fが撓むことにより、中央突起5aと下側中央突起5bが下降する。下側中央突起5bが下降すると、第2のプリント基板4の中央可動接点4tと第1のプリント基板3の中央固定接点3tとからなるホームポジション接点SW0が閉じる。
【0032】
同図(b)は接点SW1〜36が閉じた状態を示すものである。前ペダル7が斜めに押下されると、ラバードーム5のドーム部5eが撓むことにより、円周状突起5cと下側円周状突起部5cが下降する。下側円周状突起部5cが下降すると、第2のプリント基板4の可動接点4sと第1のプリント基板3の固定接点3sとからなるメンブレンスイッチSWが閉じることになる。なお、前ペダル7及び後方ペダル17の動作量としての傾き角度は2〜6度程度としてあるので、足の押下負担は軽く済む。
【0033】
操作者の足操作方法について説明する。図8は第1の実施の形態に関わるポインティングデバイスの操作例を示す説明図である。まず、図8(a)は本ポインティングデバイス1が出力する方向情報の割り振りを示すものである。第1の載足部1a側はホームポジションキートップ9を中心として8方向、即ち前、右前、右、右後、後、左後、左、左前に割り振ってある。第2の載足部1b側は左右2方向に割り振ってある。
【0034】
図8(b)はポインティングデバイス1を図8(a)の矢印R方向から見たものであり、第2の載足部1bを左右方向に操作する場合を示す。図8(c)はポインティングデバイス1を図8(a)の矢印F方向から見たものであり、第1の載足部1aを左右方向に操作する場合を示している。足首を矢印方向に回転させて操作することができる。
【0035】
図8(d)はポインティングデバイス1を図8(a)の矢印Y方向から見たものであり、通常は爪先を第1の載足部1aに、踵を第2の載足部1b載せる。前述のように後方ペダル17の第2の載足部1b側が段差Gにより低くなっている。
【0036】
図8(e)は前後方向の操作を示すもので、実線は「前」方向の領域を押下する場合であり、破線は「後」方向の領域を押下する場合を示している。図8(f)はホームポジションキートップ9の押下時のもので、破線で示す通常時の状態から実線で示すように爪先を引いて操作することになる。
【0037】
踵と爪先の同時動作が難しい場合には、一度踵を押下して第2の載足部1bを押下状態とし、その後に踵を離して第1の載足部1aを押下し、続けて再度第2の載足部1bを押下、開放での操作終了となるようなプログラムを構築しても良い。
【0038】
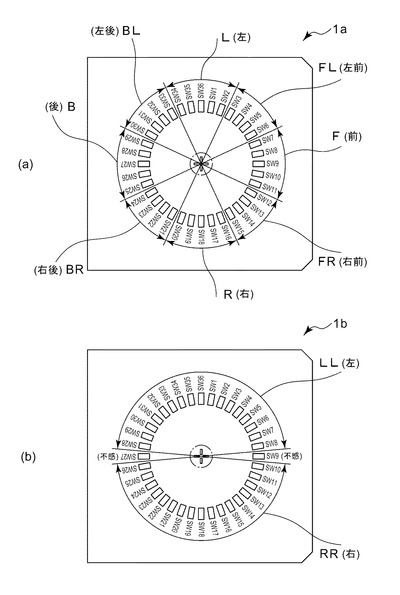
次に、操作者の「左足」を例としメンブレンスィッチ群の押下方向を説明する。図9は第1の実施の形態に関わるメンブレンスィッチ群の押下方向の割振りを示す説明図である。
【0039】
第1の載足部1aの接点SW1〜SW36を押下方向として割り振ったものである。図9において、接点SW7〜SW11をグループFとして「前」に設定する。即ち、グループFの接点SW7〜SW11が閉じたと判定したとき、ポインティングデバイス1は上位装置PCに対しカーソルを移動させる方向情報として「前」を送信する。そうすると上位装置PCは表示装置上のカーソルを上方に移動するように表示する。
【0040】
同様に接点SW12〜SW15はグループFRとして「右前」に設定し、更に接点SW16〜SW20はグループRとして「右」に設定してある。以後、接点SW21〜SW24をグループBRとして「右後」に設定し、接点SW25〜SW29はグループBとして「後」に設定してある。接点SW30〜SW33はグループBLとして「左後」に設定し、接点SW34〜SW2はグループLとして「左」に設定し、接点SW3〜SW6はグループFLとして「左前」に設定する。
【0041】
即ち、ポインティングデバイス1が上位装置PCへ送信するカーソル移動方向は8方向である。従って、上位装置PCが表示装置の画面上にカーソルを移動する方向も8方向である。
【0042】
図9(b)は第2の載足部1bの接点SW1〜SW36を割り振ったもので、図において接点SW10〜SW26はグループRRとして「右」に設定、即ち、左足首を内側に倒した場合に押下され、検出されるよう設定してある。同様に接点SW28〜SW8はグループLLとして「左」に設定、即ち、左足首を外側に倒した場合に押下され検出されるよう設定してある。そうすると上位装置PCは、ポインティングデバイスとしてのマウスの右クリック及び左クリックと同様に前記画面上の決定操作信号として処理する。なお、接点SW9とSW27は不感接点パターンに設定してある。
【0043】
図10は第1の実施の形態に関わるCPU10の機能を示すブロック図である。押下状態検出部21は、接点SW1〜SW36、ホームポジション接点SW0及び接点パターングループSWa、Swbが閉じたことを検出する。即ち、接点SW1〜SW36については、どの接点の位置が閉じたかを検出する。そしてこれにより、押下状態検出部21は、カーソルを移動させるための方向を判定する。
【0044】
記憶部22は、押下状態検出部21で検出した押下状態を記憶する。記憶部22は格納エリアM1〜M4を有する。グループ判定部23は、閉じた接点SW1〜SW36について、接点パターンのグループF〜FLまでの8個のグループ中で単一のグループ内であるか、隣接する複数のグループに跨っているかを判定する。グループ判定部23により判定されたグループF〜FLにより、カーソルを移動させる方向が決定される。
【0045】
更に、加速度判定部24は、閉じた接点SW1〜SW36から閉じた接点数を算出し、カーソルを移動させるための加速度を判定する。通信制御部25は、上位装置PCに対し上位接続ケーブル3bを介して、カーソルの移動方向及び加速度等の出力を送出する。
【0046】
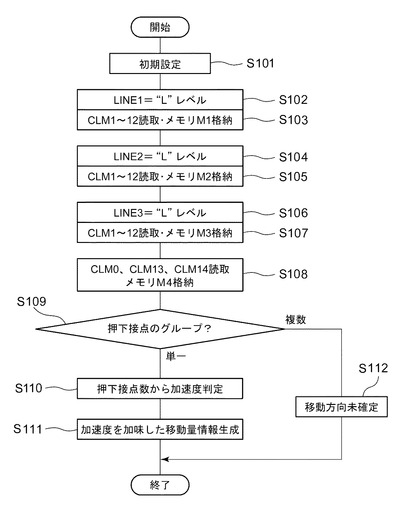
次に第1の実施の形態に関わるポインティングデバイスの動作を説明する。図11は第1の実施の形態に関わるポインティングデバイスの動作フローチャートである。なお、Sは動作ステップを意味する。
S101:まず、CPU10に内蔵されたプログラムにより初期設定を行う。端子LINE1〜LINE3は初期設定で"H(ハイインピーダンス)"レベルに設定される。
【0047】
S102:CPU10の制御部20はステップS101の初期設定後に端子LINE1を"L(ロー)"レベルに設定する。
S103:CPU10の制御部20は押下状態検出部21に対し、端子CLM1〜CLM12のレベルを読み込んで接点SW27〜SW2の押下状態を検出するよう指示する。そして、記憶部22に対し、これを格納するよう指示する。記憶部22は格納エリアM1にこれを記憶する。
【0048】
S104:同様にステップS101の初期設定後に端子LINE2を"L(ロー)"レベルに設定する。
S105:CPU10の制御部20は押下状態検出部21に対し、端子CLM1〜CLM12のレベルを読み込んで接点SW15〜SW26の押下状態を検出するよう指示する。そして、記憶部22に対し、これを格納するよう指示する。記憶部22は格納エリアM2にこれを記憶する。
【0049】
S106:ステップS101の初期設定後に端子LINE3を"L(ロー)"レベルに設定する。
S107:CPU10の制御部20は押下状態検出部21に対し、端子CLM1〜CLM12のレベルを読み込んで接点SW3〜SW14の押下状態を検出するよう指示する。そして、記憶部22に対し、これを格納するよう指示する。記憶部22は格納エリアM3にこれを記憶する。
【0050】
S108:CPU10の制御部20は押下状態検出部21に対し、端子CLM0、CLM13、CLM14のレベルを読み込んで、第1の載足部1aのホームポジションスィッチSW0と、第2の載足部1bの接点パターングループSWa、Swbの押下状態を検出するよう指示する。そして、記憶部22に対し、これを格納するよう指示する。記憶部22は格納エリアM4にこれを記憶する。ここで上述した各メンブレンスィッチが未押下の場合、端子CLM1〜CLM12は"H"レベルのままであり、押下があると該当する端子CLMが"L"レベルとなる。
【0051】
S109:CPU10の制御部20は格納エリアM1〜M3に格納された押下状態(Hレベル/Lレベル)から、操作した方向と、操作圧力を判定する。この操作圧力は接点、即ち「メンブレンスイッチSW」の同時押下数から求める。CPU10は、グループ判定部23に対し、閉じた接点は図9(a)に示した接点パターンのグループF〜FLまでの8個のグループ中で単一のグループ内であるか、隣接する複数のグループに跨っているかを判定するよう指示する。
【0052】
S110:ステップS109において、単一のグループ内であると判定された場合には、CPU10の制御部20は加速度判定部24に対し、そのグループ内で同時押下された接点数に応じたカーソル移動の加速度として判定するよう指示する。
【0053】
図12は第1の実施の形態に関わるポインティングデバイスの加速度を示す説明図である。同図に示すように押下接点数(N)から加速度情報を決定させる。本実施の形態では、押下接点数が1個の場合は「加速無し」と定義し、2個の場合は「加速度小」と定義し、3個の場合は「加速度中」と定義し、4個以上の場合は「加速度大」と定義してある。加速度判定部24はこれに基づいて加速度を判定する。
【0054】
S111:制御部20はステップS110にて判定した加速度に応じた定数をカーソル移動値に乗算する。例えば、グループF内の接点SW8とSW9が同時に閉じている場合、カーソルは「前」方向に「加速度小」で移動することになる。CPU10の制御部20は、ステップ108で取得し格納エリアM4に格納されたホームポジションスィッチSW0と、接点パターングループSWa、Swbのスイッチ情報を加味して、上位装置PCへ送信する方向情報と加速度情報(データ)を生成する。
【0055】
S112:ステップS109において、接点パターンのグループF〜FLまでの8個のグループ中で隣接する複数の接点パターンのグループに跨っている場合は、カーソルの移動方向未確定として方向情報と加速度情報の作成を行わない。例えば、グループFL内の接点SW6とグループF内の接点SW7が同時に閉じている場合は方向未確定となり、押下無効とする。
【0056】
次に、第1の実施の形態の変形例1及び2を説明する。上述の第1の実施の形態は、ステップS112で説明した通り、閉じた接点が隣接する複数の接点パターンのグループF〜FLに跨っている場合は、カーソルの移動方向未確定として説明した。しかしながら、操作する足(右足又は左足),足の骨格や筋肉の微妙な差異,癖等で操作者によっては隣接する複数の接点パターンのグループに跨るケースが増加してしまうことが懸念される。第1の実施の形態の変形例1は多数決方式でグループF〜FLのうちいずれかを決定するものである。
【0057】
図13は第1の実施の形態の変形例1及び2に関わる押下方向を示す説明図であり、図14は第1の実施の形態の変形例1に関わる移動方向の判定を示す説明図である。図13(a)に示すように、グループFの接点SW7,SW8,SW9の3接点とグループFLの接点SW6を含む接点Nが同時に閉じた場合に、CPU10はグループFとFL内の閉じた接点パターン数の比較を行う。この比較と判定結果を図14に示す。図14(a)では押下接点数が4個の場合を示し、図14(b)では押下接点数が5個の場合を例示している。図13(a)で示す場合は、グループFに3個の押下接点、グループFLには1個の押下接点であるから、図14(a)より判定移動方向はグループFとして上位装置PCに出力されることになる。なお、グループFとグループFLの押下接点数が同一の場合には方向未確定とするのは前述したものと同じである。更には、押下接点数の差異が一定数(例えば、2パターン)以上の場合のみ判定移動方向情報を出力するようにしても良い。このように多数決方式を採用することで、操作の繰返回数を軽減できるという効果を奏する。
【0058】
次に、変形例2を説明する。先に説明した第1の実施の形態の図9に示したメンブレンスィッチ群の押下方向は、予め実験的に求め、初期設定としてある所謂デフォルト設定の方向情報である。上記変形例1でも説明したように操作者の足の大きさ(特に爪先部の横幅)などは加齢とともに変化することも想定できる。変形例2では図9に示すデフォルト設定に対して補正するものである。
【0059】
デフォルト設定に対して、CPU10は、操作者に対し、各押下方向の中からある一方向への操作誘導を複数回分だけ行なわせ、それらの押下(接点)位置の分布情報を収集する。この試行押下の操作を全8方向に対して実行し、操作者の癖や習性を把握した上で、その収集した全分布情報を基にCPU10は押下接点のグループ分割として設定する。以後、上位装置PC側へ出力される押下接点の方向情報として使用される。これらの補正情報は図示しないメモリに保存されると共に、操作者毎の例えば、識別番号やパスワードの入力操作によりメモリより読み出されて方向情報が補正され、自動的に切り換えられる。図13(b)はグループFL2を接点SW2からSW5までに変更し、グループF2を接点SW6〜SW11に変更をしたことを示す。このように補正することで、操作の繰返回数を軽減できる。
【0060】
以上本実施の形態によれば、カーソルを移動させる場合に、足の移動が腿(もも)を動かすものではなく、主に踵から爪先(指先)までとし、動かす方向を床面方向への回転動作にすることで疲労感を低減できる。また、移動方向を検出する手段にメンブレンスイッチを用いることで構造が簡単で、耐環境性に優れ、かつ安価に製作することが可能となるほか、保守性の向上も可能である。更に薄型化したポインティングデバイスを提供することが可能となる。
【0061】
また、本実施の形態によれば、前ペダル7を傾斜可能に支持する円周状突起5cと前ペダル7からの押下力を下方のメンブレンスイッチSWに伝える下側円周状突起5dを一体化したラバードーム5を設けたので、前ペダル7の押下を正確にメンブレンスイッチSWに伝えることができ、構造が簡単なポインティングデバイスとすることができる。
【0062】
更に、ラバードーム5の中央にホームポジションキートップ9を設け、ホームポジションキートップ9からの押下力を受ける中央突起5aと、この押圧力を下方のホームポジション接点SW0に伝える下側中央突起5bを一体化したラバードーム5を設けたので、同様にホームポジションキートップ9からの押下を正確にホームポジション接点SW0に伝えることができ、構造が簡単なポインティングデバイスとすることができる。
【0063】
更にまた、第2の載足部1bは、第1の載足部1aと同様の構成を有するので、特別な構造変更をすることなく、マウスの左右クリックに相当する信号を送信するポインティングデバイス1とすることができる。
【0064】
更にまた、本実施の形態では、接点数が36個に対し、移動方向を8方向としたが、これに限らず、ファームウェアによる設定の変更によって、移動方向数を増やすことが可能であるとともに、36個の接点の意味を変更することが可能なポインティングデバイス1とすることができる。
【0065】
(第2の実施の形態)
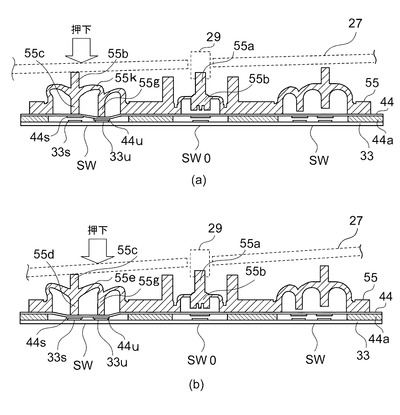
次に第2の実施の形態について説明する。図15は本発明の第2の実施の形態に関わるポインティングデバイスの動作状態を示す断面説明図である。前述の第1の実施の形態に関するポインティングデバイス1では、前ペダル7を支持する円周状突起5cに対し、接点が一対の可動接点4s及び固定接点3sであるところ、本実施の形態では、円周の内側に隣接して新たに一対の接点パターンを設け、接点が二対の可動接点44s、固定接点33s及び第2の可動接点44u、第2の固定接点33uとしたものである。そして、ラバードーム55の形状を変更することにより、前ペダル27からの押下荷重の変化を検出できるようにしたものである。
【0066】
同図において、前ペダル27及びホームポジションキートップ29は第1の実施の形態と同じである。ラバードーム55は中央に設けた中央突起55aと、円周状に連続した円周状突起55cを有する。ラバードーム55は、円周状突起55cにより前ペダル27を傾斜可能に支持する。
【0067】
円周状突起55cの下側は、円周状突起55cと一体化している下側円周状突起55dと本実施の形態に関する第2の下側円周状突起55gが設けられている。第2の下側円周状突起55gは、下側円周状突起55dに同心状でかつ内側に設けられる。更に、第2の下側円周状突起55gは、ドーム部55eを介して、円周状突起55cと一体化して設けられ、下側円周状突起55dより長足に形成されている。即ち、第2の下側円周状突起55gと下側円周状突起55dは、第2のプリント基板44へ向かう長さが異なるように構成される。そのため、前ペダル27が押下され円周状突起55cが降下すると、まず先に第2の下側円周状突起55gが荷重を下方に伝えることになる。
【0068】
第2の下側円周状突起55gの下部には複数のメンブレンスイッチが第2の下側円周状突起55gに対応して円周状に形成されている。メンブレンスイッチは、第2のプリント基板44側の第2の可動接点44uと第1のプリント基板33側の第2の固定接点33uにより構成される。図15(a)に示すように、この第2の可動接点44uと第2の固定接点33uを閉じるのは、第2の下側円周状突起55gにより行われる。
【0069】
更にラバードーム55の押下が進むと、図15(b)に示すように、短足の下側円周状突起55dが荷重を下方に伝えることになる。下側円周状突起55dの下部にある複数のメンブレンスイッチが下側円周状突起55dに対応して円周状に形成されている。この場合のメンブレンスイッチは、第2のプリント基板44側の可動接点44sと第1のプリント基板33側の固定接点33sにより構成される。メンブレンスィッチを直接的に押下するのは図示するように円周状突起55cと一体化している下側円周状突起55dにより行われることになる。
【0070】
長さが異なる第2の下側円周状突起55gと下側円周状突起55dの下部にそれぞれメンブレンスイッチが設けられる。これによって、前ペダル27に加えられる荷重の変化が検出可能となり、前ペダル27の押下の強弱でカーソル移動量を変化させることが可能となる。
【0071】
(第3の実施の形態)
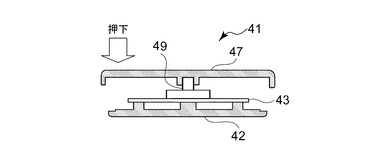
次に第3の実施の形態について説明する。図16は本発明の第3の実施の形態に関わるポインティングデバイスを示す断面説明図である。第3の実施の形態に関わるポインティングデバイス41において、ロワーカバー42は基板43を支持する。基板43はその中央にスティックポインタ49を搭載している。スティックポインタ49の軸49aは先端に前ペダル47と一体に固定されている。前ペダル47は操作者の足が載置可能となっている。
【0072】
操作者が足で前ペダル47を所定の方向に荷重を加えると、スティックポインタ49の軸49aが撓み、スティックポインタ49これを検出する。スティックポインタ49が行う検出方式は公知の方式でよく、例えば静電容量方式で可能である。更に、スティックポインタ49が受ける荷重量はセンサ出力に比例することができるため、スティックポインタ49は操作荷重の大小を検出可能となる。図示しない制御部は、これを加速度に変更する。これにより、ポインティングデバイス41は、カーソル移動方向情報及び加速度情報を上位装置PCに出力することができる。
【0073】
(第4の実施の形態)
次に第4の実施の形態について説明する。図17は本発明の第4の実施の形態に関わるポインティングデバイスを示す断面説明図である。第4の実施の形態に関わるポインティングデバイス51において、ロワーカバー52はその中央に支柱59を有し、支柱59は先端に前ペダル57と一体に固定され前ペダル57を支持している。前ペダル57の上面は操作者の足が載置可能となっている。そして、前ペダル57の下面には、加速度センサ58が配置されている。
【0074】
操作者が足で前ペダル57を所定の方向に荷重を加えると、支柱59が撓み、前ペダル57の下面に配置されている加速度センサ58が前ペダル57の傾き方向を検出する。加速度センサ58は3軸方向を検出可能である。加速度センサ58が受ける荷重量はセンサ出力に比例することができるため、加速度センサ58は操作荷重の大小を検出可能となる。これにより、ポインティングデバイス51は、カーソル移動方向情報及び加速度情報を上位装置PCに出力することができる。
【0075】
なお、上記実施の形態は足用のポインティングデバイスとして説明したが、これに限らない。前ペダル7と後方ペダル17は外部からの荷重を受けるペダル部として機能する。
【符号の説明】
【0076】
1 ポインティングデバイス
1a 第1の載足部
1b 第2の載足部
2 ロワーカバー
3 第1のプリント基板
4 第2のプリント基板
5 ラバードーム
6 ラバー押え
7 前ペダル
8 メンブレンシート
9 ホームポジションキートップ
17 後方ペダル
PC 上位装置
SW メンブレンスィッチ
【技術分野】
【0001】
本発明は、パーソナルコンピュータ等の表示装置の画面上におけるカーソル移動やクリック動作を足の動きによって行うポインティングデバイスに関する。
【背景技術】
【0002】
従来、パーソナルコンピュータを操作する場合、手の不自由な操作者が操作する必要性からポインティングデバイスとしてのマウスを足で操作する技術が知られている。特開平10−97374号公報(特許文献1)には、足を乗せる移動部と、移動部を保持しかつ前後左右に移動させるためのベースで構成される足用ポインティングデバイスが記載されている。特許文献1の足用ポインティングデバイスの実際の動作は、パソコンの画面のカーソルを画面上方に移動させる場合、足を床面に平行にかつ前方に移動させる。そして、カーソルを画面下方に移動させる場合、足を後方に移動させ、カーソルを画面左右に移動させる場合は、足を左右に移動させるものである。
【0003】
一方、特開平8−179879号公報(特許文献2)には、操作者の足を載置するための載置部の傾き方向を検出する傾斜方向検出手段と、載置部の傾き量を検出する傾き量検出手段を設け、この検出結果に応じてカーソル移動信号を送出するようにしたポインティングデバイスが記載されている。特許文献2記載の技術では、ボタンスィッチが押される深さは足を載置するプレートの傾き量に応じて変化する。そして、プレートの傾き量を検出するために、制御線A1,B1,C1のいずれかが信号線Sと電気的に接続することにより行われる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−97374号公報
【特許文献2】特開平8−179879号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1記載の技術では、カーソルを移動させたい方向に足置き部をずらす足動作が必要であり、腿(もも)から下側を動かすため、長時間の操作には不向きと考えられる。更に、床上に置かれて動かないベース部とその上に足の動きに従って動く移動部から成るため、機構的にも複雑な構造が要求される。更に、床面に設置されることから、防塵、防水構造が必要であり、長期の使用に耐えるため可動部の定期的な保守が必要であるという問題点があった。
【0006】
特許文献2記載の技術において、傾き量を検出するための制御線A1,B1,C1は、信号線Sの移動方向に沿って、即ち装置の縦方向に設けられている。そのため特許文献2記載の技術では、装置が大型化するという問題点がある。
【0007】
本発明が解決しようとする課題は、足への負担を少なくすることにより長時間の操作を可能とし、構造的にも簡単でかつ長期の使用に耐えることができ、更に装置を薄型化することができるポインティングデバイスを提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するために、特許請求の範囲の請求項1に記載の発明は、外部からの荷重を受けるペダル部と、前記ペダル部を傾斜可能に支持するとともに、前記ペダル部からの荷重を下方に伝える円周状突起を有するラバードーム部と、円周状に設けた複数の固定接点を有する第1のプリント基板と、前記第1のプリント基板の前記複数の固定接点に対向し、かつ前記円周状突起の下方に設けられた可動接点を有する第2のプリント基板と、前記第1のプリント基板の前記固定接点と前記第2のプリント基板の前記可動接点を含んで構成されるメンブレンスィッチと、前記メンブレンスィッチが閉じたことを検知することによって、カーソル移動方向情報を上位装置へ送信する制御部を有することを特徴とするポインティングデバイスである。
【発明の効果】
【0009】
本発明によれば、物理的に動作量の少ないメンブレンスィッチを用いたので、足の移動量を少なくでき、足の踝(くるぶし)から下を傾けることで操作できる。従って、操作性の良いポインティングデバイスを提供することができる。更に、固定接点と可動接点とをメンブレンスィッチで構成することとしたので、構造的にも簡単でかつ長期の使用に耐えることができ、更に薄型化したポインティングデバイスを得ることができる。
【図面の簡単な説明】
【0010】
【図1】第1の実施の形態に関わるポインティングデバイスの構造を示す分解斜視図である。
【図2】第1の実施の形態に関わるポインティングデバイスの外観図である。
【図3】第1の実施の形態に関わるポインティングデバイスの縦断面図である。
【図4】第1の実施の形態に関わるメンブレンスィッチ群の要部説明図である。
【図5】第1の実施の形態に関わるメンブレンスィッチ群の接点パターンを示す説明図である。
【図6】第1の実施の形態に関わるポインティングデバイスの信号発生手段を示す回路図である。
【図7】第1の実施の形態に関わるポインティングデバイスの動作状態を示す断面説明図である。
【図8】第1の実施の形態に関わるポインティングデバイスの操作例を示す説明図である。
【図9】第1の実施の形態に関わるメンブレンスィッチ群の押下方向の割振りを示す説明図である。
【図10】第1の実施の形態に関わるCPU10の機能を示すブロック図である。
【図11】第1の実施の形態に関わるポインティングデバイスの動作フローチャートである。
【図12】第1の実施の形態に関わるポインティングデバイスの加速度を示す説明図である。
【図13】第1の実施の形態の変形例1及び2に関わる押下方向を示す説明図である。
【図14】第1の実施の形態の変形例1に関わる移動方向の判定を示す説明図である。
【図15】第2の実施の形態に関わるポインティングデバイスの動作状態を示す断面説明図である。
【図16】第3の実施の形態に関わるポインティングデバイスを示す断面説明図である。
【図17】第4の実施の形態に関わるポインティングデバイスを示す断面説明図である。
【発明を実施するための形態】
【0011】
(第1の実施の形態)
以下、本発明の第1の実施の形態を図面に従って説明する。図1は第1の実施の形態に関わるポインティングデバイスの構造を示す分解斜視図であり、図2は第1の実施の形態に関わるポインティングデバイスの外観図であり、図3は第1の実施の形態に関わるポインティングデバイスの縦断面図である。
【0012】
図2において、第1の実施の形態に関わるポインティングデバイス1は操作者の足を乗せて操作するため、長方形を成している。ポインティングデバイス1は第1の載足部1aと第2の載足部1bからなる。第1の載足部1aは、操作者の足先部位を載せる前ペダル7を有し、第2の載足部1bは、操作者の踵(かかと)部位を載せる後方ペダル17を有する。第1の載足部1aには、後述するホームポジションキートップ9が設けられている。前ペダル7と後方ペダル17は外部からの荷重を受けるペダル部として機能する。
【0013】
ポインティングデバイス1は床面に配置され、後述する上位装置としてのパーソナルコンピュータ(以下、上位装置PCという)の表示装置の画面上のカーソルを所定の方向に移動させるために、上位装置PCのマウスコネクタに上位接続ケーブル3bを介して接続されるものである。なお、カーソルとは、上位装置PCの表示装置の画面上で入力位置を示す下線や記号又は画面を移動する矢印のことである。以下、ポインティングデバイス1を構成する各部を説明する。
【0014】
図1及び図3において、2はロワーカバーであり、裏面が床面と接する部位であり樹脂成型等によって製作されている。3は第1の載足部1aの基材としての第1のプリント基板であり、第1のプリント基板3の上面には放射状かつ円周状に複数の接点からなる固定接点パターン35が印刷により設けられている。固定接点パターン35は、後述するラバードーム5の円周状突起5cに対応して設けられる。そして、図3に示すように第1のプリント基板3の下面には制御回路部3aが設けられ、上位装置PCとの電気的接続部である上位接続ケーブル3bが接続されている。
【0015】
8は第1の載足部1aのメンブレン(Membrane)シートであって、メンブレンとしての第2のプリント基板4と、第2のプリント基板4の下面に設けられたメンブレンスペーサ4aとによって構成されている。第2のプリント基板4の下面には、第1のプリント基板3の固定接点パターン35と対向する可動接点パターン45が印刷により設けられ、メンブレンスペーサ4aも印刷により設けられている。即ち、メンブレンスペーサ4aは、第1プリント基板3と第2のプリント基板4の間に配置され、固定接点パターン35と可動接点パターン45の部分に穴のあいた絶縁シートとして構成される。また、メンブレンシート8はフィルム製であって、荷重により撓む構成である。
【0016】
5はメンブレンシート8の上側に設けられた第1の載足部1aのラバードームであって、絶縁性弾性部材(主にゴム)で形成される。ラバードーム5は、単に足を載せた状態では座屈しない程度の硬度を有している。意図的な荷重を受けたラバードーム5が撓むと、ラバードーム5はメンブレンシート8へ荷重を掛ける。これにより、メンブレンシート8が撓むと、第1のプリント基板3の接点と第2のプリント基板4接点からなる後述するメンブレンスイッチが閉じる仕組みとなっている。そして荷重が無くなると、弾性部材としてのラバードーム5の復元力により両接点が離れる。ここで接点が閉じた場合には電気的導通がなされ、制御回路部3aに検出されることになる。なお、接点が閉じ、又は解放されることからスィッチとなるため、以後この部位をメンブレンスイッチSWと称する。
【0017】
6はラバードーム5の位置を規制する第1の載足部1aのラバー押えである。このラバー押え6は,その内側を挟まない逃げ穴6aが設けてあり、更に、ラバードーム5の外淵のみを押える固定部6bが設けてある。固定部6bにより、ロワーカバー2との間で第1のプリント基板3、メンブレンシート8、ラバードーム5を図示しないネジ等の固定手段で固定する。
【0018】
第1の載足部1aの前ペダル7はプラスチック材料などで成形され、前述の通り操作者の足先部位を載せる部分である。なお、前ペダル7は抗菌材料で成形又は抗菌表面処理を施してある。前ペダル7はラバードーム5の円周状突起5cによって支持されている。
【0019】
前ペダル7には、中央に小穴7aが設けられ、その小穴7aよりホームポジションキートップ9が突出していている。このホームポジションキートップ9はラバードーム5の中央部に設けられた後述する中央突起5a及び下側中央突起5bに対応して配置されている。そして、中央突起5a及び下側中央突起5bは、放射状かつ円周状のメンブレンスィッチSWの中央部に配した後述する電気的接点と対応している。この電気接点は、ホームポジション接点SW0を構成する。なお、復元力は弾性部材としてのラバードーム5によることは前述のメンブレンスィッチSWと同様である。ホームポジションキートップ9は基本的な役割として、上位装置PC側において操作対象や領域の指定に伴う基本動作を行うためのものである。
【0020】
第2の載足部1bも図示するように、表面には放射状かつ円周状に固定接点パターン35が設けられている第1の後方プリント基板13を有する。第1の後方プリント基板13には、前述の第1のプリント基板3と同様にメンブレンスィッチSWが構成される。更に第1のプリント基板3とケーブル3dにより電気的に接続されている。
【0021】
更に、第2の載足部1bは、前述の第1の載足部1aと同様に、第2の後方プリント基板14と後方メンブレンスペーサ14aからなる後方メンブレンシート18、後方ラバードーム15、後方ラバー押え16及び後方ペダル17とを有する。後方ペダル17は、前ペダル7と同様にプラスチック材料などで成形され、操作者の踵を載せる部分である。第2の載足部1bは、ホームポジションキートップ9を有しない点以外は前述の第1の載足部1aと同様の構成であるので、説明を省略する。第2の載足部1bは、第1の載足部1aとほぼ同様の構造であるので、特別な構造変更をすることなく、ポインティングデバイスとしてのマウスの左右クリックに相当する信号を送信することができる。
【0022】
2aはロワーカバー2の側壁に設けられた凹部であり、本実施の形態では左右に計8個設けてある。7b及び17bは前ペダル7及び後方ペダル17の内壁に設けた凸部であって、ロワーカバー2に設けた凹部2aと嵌合させてある。なお、前ペダル7及び後方ペダル17は、図示しない手段によって、凹部2aの一部分をガイドとしてそれぞれ独立して上下動可能に構成されると共に抜け落ちないよう構成されている。
【0023】
第1の載足部1aと第2の載足部1bは図3に示すように、段差Gが設けられている。これは、操作者の足の骨格の特徴を考慮したもので、第2の載足部1b側、即ち、踵を載せる位置を低くすることで、自然体のまま足を載せるだけでペダル操作ができるようになっている。これにより長時間操作をしても疲れにくいという効果がある。
【0024】
図4は第1の実施の形態に関わるメンブレンスィッチ群の要部説明図である。図4(a)はラバードーム5を示す平面図である。ラバードーム5は中央に設けた中央突起5aと、円周状に連続した円周状突起5cを有する。そして、ラバードーム5は、円周状突起5cにより前ペダル7を傾斜可能に支持する。
【0025】
図4(b)は図4(a)に示すAA矢視断面図である。円周状突起5cは断面がドーム状である連続したドーム部5eによりラバードーム5の本体から支持されて形成されている。円周状突起5cの下側は、円周状突起5cと一体化している下側円周状突起5dが設けられている。前ペダル7が押下されると、ドーム部5eが撓むことにより、円周状突起5cと一体になっている下側円周状突起5dが荷重を下方に伝えることになる。下側円周状突起5dの下部には、複数のメンブレンスイッチSWが後述するように下側円周状突起5dに対応して円周状に形成されている。メンブレンスイッチSWは、第2のプリント基板4側の可動接点4sと第1のプリント基板3側の固定接点3sにより構成される。メンブレンスィッチSWを直接的に押下するのは図示するように円周状突起5cと一体化している下側円周状突起5dにより行われる。
【0026】
中央突起5aは、ホームポジションキートップ9の下部に設けられる。中央突起5aは断面がドーム状である連続した中央ドーム部5fによりラバードーム5の本体から支持されて形成されている。ホームポジションキートップ9が押下されると、中央ドーム部5fが撓むことにより、中央突起5aと一体になっている下側中央突起5bが荷重を下方に伝えることになる。下側中央突起5bの下部には、一箇所のホームポジション接点SW0が下側中央突起5bに対応して形成されている。ホームポジション接点SW0は、第2のプリント基板4側の中央可動接点4tと第1のプリント基板3側の中央固定接点3tにより構成される。ホームポジション接点SW0を直接的に押下するのは、図示するように中央突起5aと一体化している下側中央突起5bにより行われる。なお、ホームポジション接点SW0は、構造としてはメンブレンスィッチSWと同じである。
【0027】
次に、接点パターンについて説明する。図5は第1の実施の形態に関わるメンブレンスィッチ群の接点パターンを示す説明図である。まず、第1のプリント基板3には、固定接点3sが放射状かつ円周状に配置されて、固定接点パターン35を形成している。固定接点パターン35は、中央部に配したホームポジション接点SW0を中心とし所定距離だけ離れた円弧状に複数の接点SW1〜SW36として設けてある。本実施の形態では角度10度毎に36分割してあり、3個のグループに対応して配置される。接点SW1〜SW36は後述する端子CLM1〜CLM12に接続される。
【0028】
同図において、第2のプリント基板4側の可動接点4sは、破線で示すように固定接点3sの3グループに対応して設けられ、可動接点パターン45を形成している。そして、可動接点パターン45は第2のプリント基板4の3個の端子LINE1、LINE2、LINE3に接続される。同図に示すように第2のプリント基板4側の端子LINE1に対応する第1のプリント基板3の接点はSW2、SW1、SW36〜SW27までの12個である。端子LINE2に対応する接点はSW26〜SW15までの12個である。そして、端子LINE3に対応する接点はSW14〜SW3までの12個が割り当てられている。
【0029】
図6は第1の実施の形態に関わるポインティングデバイスの信号発生手段を示す回路図である。同図に示す接点SW2、SW26及びSW14を第1グループとして端子CLM1に接続され、接点SW1、SW25及びSW13を第2グループとして端子CLM2に接続される。以下同様に接点SW27、SW15及びSW3までの第12グループとして端子CLM12に接続される。これらの全12グループから第1のプリント基板3側として端子CLM1〜CLM12までの12個の信号出力が可能となる。図5からも理解できるように接点SW2とSW26及びSW14は互いに角度120度ずれた位置関係である。例えば、接点SW27が閉じた場合には、第1のプリント基板3側は端子CLM12とメンブレンシート8側の端子LINE1が電気的に接続されことが制御回路部3aに検出されることになる。
【0030】
第2の載足部1bについては、接点SW28、SW29〜SW36、SW1〜SW8までの接点パターングループSWaが端子CLM13に接続される。また、接点SW10〜SW26までの接点パターングループSWbが端子CLM14に電気的に接続される。以上、制御回路3aが検出した方向情報(電気信号)はCPU10に送信される。CPU10はそれらの方向情報を通信制御部10aを介して上位装置PCに出力することになる。
【0031】
図7は第1の実施の形態に関わるポインティングデバイスの動作状態を示す断面説明図である。同図(a)はホームポジションキートップ9が荷重を受けて押下された状態を示すものである。ホームポジションキートップ9が押下されると、ラバードーム5の中央ドーム部5fが撓むことにより、中央突起5aと下側中央突起5bが下降する。下側中央突起5bが下降すると、第2のプリント基板4の中央可動接点4tと第1のプリント基板3の中央固定接点3tとからなるホームポジション接点SW0が閉じる。
【0032】
同図(b)は接点SW1〜36が閉じた状態を示すものである。前ペダル7が斜めに押下されると、ラバードーム5のドーム部5eが撓むことにより、円周状突起5cと下側円周状突起部5cが下降する。下側円周状突起部5cが下降すると、第2のプリント基板4の可動接点4sと第1のプリント基板3の固定接点3sとからなるメンブレンスイッチSWが閉じることになる。なお、前ペダル7及び後方ペダル17の動作量としての傾き角度は2〜6度程度としてあるので、足の押下負担は軽く済む。
【0033】
操作者の足操作方法について説明する。図8は第1の実施の形態に関わるポインティングデバイスの操作例を示す説明図である。まず、図8(a)は本ポインティングデバイス1が出力する方向情報の割り振りを示すものである。第1の載足部1a側はホームポジションキートップ9を中心として8方向、即ち前、右前、右、右後、後、左後、左、左前に割り振ってある。第2の載足部1b側は左右2方向に割り振ってある。
【0034】
図8(b)はポインティングデバイス1を図8(a)の矢印R方向から見たものであり、第2の載足部1bを左右方向に操作する場合を示す。図8(c)はポインティングデバイス1を図8(a)の矢印F方向から見たものであり、第1の載足部1aを左右方向に操作する場合を示している。足首を矢印方向に回転させて操作することができる。
【0035】
図8(d)はポインティングデバイス1を図8(a)の矢印Y方向から見たものであり、通常は爪先を第1の載足部1aに、踵を第2の載足部1b載せる。前述のように後方ペダル17の第2の載足部1b側が段差Gにより低くなっている。
【0036】
図8(e)は前後方向の操作を示すもので、実線は「前」方向の領域を押下する場合であり、破線は「後」方向の領域を押下する場合を示している。図8(f)はホームポジションキートップ9の押下時のもので、破線で示す通常時の状態から実線で示すように爪先を引いて操作することになる。
【0037】
踵と爪先の同時動作が難しい場合には、一度踵を押下して第2の載足部1bを押下状態とし、その後に踵を離して第1の載足部1aを押下し、続けて再度第2の載足部1bを押下、開放での操作終了となるようなプログラムを構築しても良い。
【0038】
次に、操作者の「左足」を例としメンブレンスィッチ群の押下方向を説明する。図9は第1の実施の形態に関わるメンブレンスィッチ群の押下方向の割振りを示す説明図である。
【0039】
第1の載足部1aの接点SW1〜SW36を押下方向として割り振ったものである。図9において、接点SW7〜SW11をグループFとして「前」に設定する。即ち、グループFの接点SW7〜SW11が閉じたと判定したとき、ポインティングデバイス1は上位装置PCに対しカーソルを移動させる方向情報として「前」を送信する。そうすると上位装置PCは表示装置上のカーソルを上方に移動するように表示する。
【0040】
同様に接点SW12〜SW15はグループFRとして「右前」に設定し、更に接点SW16〜SW20はグループRとして「右」に設定してある。以後、接点SW21〜SW24をグループBRとして「右後」に設定し、接点SW25〜SW29はグループBとして「後」に設定してある。接点SW30〜SW33はグループBLとして「左後」に設定し、接点SW34〜SW2はグループLとして「左」に設定し、接点SW3〜SW6はグループFLとして「左前」に設定する。
【0041】
即ち、ポインティングデバイス1が上位装置PCへ送信するカーソル移動方向は8方向である。従って、上位装置PCが表示装置の画面上にカーソルを移動する方向も8方向である。
【0042】
図9(b)は第2の載足部1bの接点SW1〜SW36を割り振ったもので、図において接点SW10〜SW26はグループRRとして「右」に設定、即ち、左足首を内側に倒した場合に押下され、検出されるよう設定してある。同様に接点SW28〜SW8はグループLLとして「左」に設定、即ち、左足首を外側に倒した場合に押下され検出されるよう設定してある。そうすると上位装置PCは、ポインティングデバイスとしてのマウスの右クリック及び左クリックと同様に前記画面上の決定操作信号として処理する。なお、接点SW9とSW27は不感接点パターンに設定してある。
【0043】
図10は第1の実施の形態に関わるCPU10の機能を示すブロック図である。押下状態検出部21は、接点SW1〜SW36、ホームポジション接点SW0及び接点パターングループSWa、Swbが閉じたことを検出する。即ち、接点SW1〜SW36については、どの接点の位置が閉じたかを検出する。そしてこれにより、押下状態検出部21は、カーソルを移動させるための方向を判定する。
【0044】
記憶部22は、押下状態検出部21で検出した押下状態を記憶する。記憶部22は格納エリアM1〜M4を有する。グループ判定部23は、閉じた接点SW1〜SW36について、接点パターンのグループF〜FLまでの8個のグループ中で単一のグループ内であるか、隣接する複数のグループに跨っているかを判定する。グループ判定部23により判定されたグループF〜FLにより、カーソルを移動させる方向が決定される。
【0045】
更に、加速度判定部24は、閉じた接点SW1〜SW36から閉じた接点数を算出し、カーソルを移動させるための加速度を判定する。通信制御部25は、上位装置PCに対し上位接続ケーブル3bを介して、カーソルの移動方向及び加速度等の出力を送出する。
【0046】
次に第1の実施の形態に関わるポインティングデバイスの動作を説明する。図11は第1の実施の形態に関わるポインティングデバイスの動作フローチャートである。なお、Sは動作ステップを意味する。
S101:まず、CPU10に内蔵されたプログラムにより初期設定を行う。端子LINE1〜LINE3は初期設定で"H(ハイインピーダンス)"レベルに設定される。
【0047】
S102:CPU10の制御部20はステップS101の初期設定後に端子LINE1を"L(ロー)"レベルに設定する。
S103:CPU10の制御部20は押下状態検出部21に対し、端子CLM1〜CLM12のレベルを読み込んで接点SW27〜SW2の押下状態を検出するよう指示する。そして、記憶部22に対し、これを格納するよう指示する。記憶部22は格納エリアM1にこれを記憶する。
【0048】
S104:同様にステップS101の初期設定後に端子LINE2を"L(ロー)"レベルに設定する。
S105:CPU10の制御部20は押下状態検出部21に対し、端子CLM1〜CLM12のレベルを読み込んで接点SW15〜SW26の押下状態を検出するよう指示する。そして、記憶部22に対し、これを格納するよう指示する。記憶部22は格納エリアM2にこれを記憶する。
【0049】
S106:ステップS101の初期設定後に端子LINE3を"L(ロー)"レベルに設定する。
S107:CPU10の制御部20は押下状態検出部21に対し、端子CLM1〜CLM12のレベルを読み込んで接点SW3〜SW14の押下状態を検出するよう指示する。そして、記憶部22に対し、これを格納するよう指示する。記憶部22は格納エリアM3にこれを記憶する。
【0050】
S108:CPU10の制御部20は押下状態検出部21に対し、端子CLM0、CLM13、CLM14のレベルを読み込んで、第1の載足部1aのホームポジションスィッチSW0と、第2の載足部1bの接点パターングループSWa、Swbの押下状態を検出するよう指示する。そして、記憶部22に対し、これを格納するよう指示する。記憶部22は格納エリアM4にこれを記憶する。ここで上述した各メンブレンスィッチが未押下の場合、端子CLM1〜CLM12は"H"レベルのままであり、押下があると該当する端子CLMが"L"レベルとなる。
【0051】
S109:CPU10の制御部20は格納エリアM1〜M3に格納された押下状態(Hレベル/Lレベル)から、操作した方向と、操作圧力を判定する。この操作圧力は接点、即ち「メンブレンスイッチSW」の同時押下数から求める。CPU10は、グループ判定部23に対し、閉じた接点は図9(a)に示した接点パターンのグループF〜FLまでの8個のグループ中で単一のグループ内であるか、隣接する複数のグループに跨っているかを判定するよう指示する。
【0052】
S110:ステップS109において、単一のグループ内であると判定された場合には、CPU10の制御部20は加速度判定部24に対し、そのグループ内で同時押下された接点数に応じたカーソル移動の加速度として判定するよう指示する。
【0053】
図12は第1の実施の形態に関わるポインティングデバイスの加速度を示す説明図である。同図に示すように押下接点数(N)から加速度情報を決定させる。本実施の形態では、押下接点数が1個の場合は「加速無し」と定義し、2個の場合は「加速度小」と定義し、3個の場合は「加速度中」と定義し、4個以上の場合は「加速度大」と定義してある。加速度判定部24はこれに基づいて加速度を判定する。
【0054】
S111:制御部20はステップS110にて判定した加速度に応じた定数をカーソル移動値に乗算する。例えば、グループF内の接点SW8とSW9が同時に閉じている場合、カーソルは「前」方向に「加速度小」で移動することになる。CPU10の制御部20は、ステップ108で取得し格納エリアM4に格納されたホームポジションスィッチSW0と、接点パターングループSWa、Swbのスイッチ情報を加味して、上位装置PCへ送信する方向情報と加速度情報(データ)を生成する。
【0055】
S112:ステップS109において、接点パターンのグループF〜FLまでの8個のグループ中で隣接する複数の接点パターンのグループに跨っている場合は、カーソルの移動方向未確定として方向情報と加速度情報の作成を行わない。例えば、グループFL内の接点SW6とグループF内の接点SW7が同時に閉じている場合は方向未確定となり、押下無効とする。
【0056】
次に、第1の実施の形態の変形例1及び2を説明する。上述の第1の実施の形態は、ステップS112で説明した通り、閉じた接点が隣接する複数の接点パターンのグループF〜FLに跨っている場合は、カーソルの移動方向未確定として説明した。しかしながら、操作する足(右足又は左足),足の骨格や筋肉の微妙な差異,癖等で操作者によっては隣接する複数の接点パターンのグループに跨るケースが増加してしまうことが懸念される。第1の実施の形態の変形例1は多数決方式でグループF〜FLのうちいずれかを決定するものである。
【0057】
図13は第1の実施の形態の変形例1及び2に関わる押下方向を示す説明図であり、図14は第1の実施の形態の変形例1に関わる移動方向の判定を示す説明図である。図13(a)に示すように、グループFの接点SW7,SW8,SW9の3接点とグループFLの接点SW6を含む接点Nが同時に閉じた場合に、CPU10はグループFとFL内の閉じた接点パターン数の比較を行う。この比較と判定結果を図14に示す。図14(a)では押下接点数が4個の場合を示し、図14(b)では押下接点数が5個の場合を例示している。図13(a)で示す場合は、グループFに3個の押下接点、グループFLには1個の押下接点であるから、図14(a)より判定移動方向はグループFとして上位装置PCに出力されることになる。なお、グループFとグループFLの押下接点数が同一の場合には方向未確定とするのは前述したものと同じである。更には、押下接点数の差異が一定数(例えば、2パターン)以上の場合のみ判定移動方向情報を出力するようにしても良い。このように多数決方式を採用することで、操作の繰返回数を軽減できるという効果を奏する。
【0058】
次に、変形例2を説明する。先に説明した第1の実施の形態の図9に示したメンブレンスィッチ群の押下方向は、予め実験的に求め、初期設定としてある所謂デフォルト設定の方向情報である。上記変形例1でも説明したように操作者の足の大きさ(特に爪先部の横幅)などは加齢とともに変化することも想定できる。変形例2では図9に示すデフォルト設定に対して補正するものである。
【0059】
デフォルト設定に対して、CPU10は、操作者に対し、各押下方向の中からある一方向への操作誘導を複数回分だけ行なわせ、それらの押下(接点)位置の分布情報を収集する。この試行押下の操作を全8方向に対して実行し、操作者の癖や習性を把握した上で、その収集した全分布情報を基にCPU10は押下接点のグループ分割として設定する。以後、上位装置PC側へ出力される押下接点の方向情報として使用される。これらの補正情報は図示しないメモリに保存されると共に、操作者毎の例えば、識別番号やパスワードの入力操作によりメモリより読み出されて方向情報が補正され、自動的に切り換えられる。図13(b)はグループFL2を接点SW2からSW5までに変更し、グループF2を接点SW6〜SW11に変更をしたことを示す。このように補正することで、操作の繰返回数を軽減できる。
【0060】
以上本実施の形態によれば、カーソルを移動させる場合に、足の移動が腿(もも)を動かすものではなく、主に踵から爪先(指先)までとし、動かす方向を床面方向への回転動作にすることで疲労感を低減できる。また、移動方向を検出する手段にメンブレンスイッチを用いることで構造が簡単で、耐環境性に優れ、かつ安価に製作することが可能となるほか、保守性の向上も可能である。更に薄型化したポインティングデバイスを提供することが可能となる。
【0061】
また、本実施の形態によれば、前ペダル7を傾斜可能に支持する円周状突起5cと前ペダル7からの押下力を下方のメンブレンスイッチSWに伝える下側円周状突起5dを一体化したラバードーム5を設けたので、前ペダル7の押下を正確にメンブレンスイッチSWに伝えることができ、構造が簡単なポインティングデバイスとすることができる。
【0062】
更に、ラバードーム5の中央にホームポジションキートップ9を設け、ホームポジションキートップ9からの押下力を受ける中央突起5aと、この押圧力を下方のホームポジション接点SW0に伝える下側中央突起5bを一体化したラバードーム5を設けたので、同様にホームポジションキートップ9からの押下を正確にホームポジション接点SW0に伝えることができ、構造が簡単なポインティングデバイスとすることができる。
【0063】
更にまた、第2の載足部1bは、第1の載足部1aと同様の構成を有するので、特別な構造変更をすることなく、マウスの左右クリックに相当する信号を送信するポインティングデバイス1とすることができる。
【0064】
更にまた、本実施の形態では、接点数が36個に対し、移動方向を8方向としたが、これに限らず、ファームウェアによる設定の変更によって、移動方向数を増やすことが可能であるとともに、36個の接点の意味を変更することが可能なポインティングデバイス1とすることができる。
【0065】
(第2の実施の形態)
次に第2の実施の形態について説明する。図15は本発明の第2の実施の形態に関わるポインティングデバイスの動作状態を示す断面説明図である。前述の第1の実施の形態に関するポインティングデバイス1では、前ペダル7を支持する円周状突起5cに対し、接点が一対の可動接点4s及び固定接点3sであるところ、本実施の形態では、円周の内側に隣接して新たに一対の接点パターンを設け、接点が二対の可動接点44s、固定接点33s及び第2の可動接点44u、第2の固定接点33uとしたものである。そして、ラバードーム55の形状を変更することにより、前ペダル27からの押下荷重の変化を検出できるようにしたものである。
【0066】
同図において、前ペダル27及びホームポジションキートップ29は第1の実施の形態と同じである。ラバードーム55は中央に設けた中央突起55aと、円周状に連続した円周状突起55cを有する。ラバードーム55は、円周状突起55cにより前ペダル27を傾斜可能に支持する。
【0067】
円周状突起55cの下側は、円周状突起55cと一体化している下側円周状突起55dと本実施の形態に関する第2の下側円周状突起55gが設けられている。第2の下側円周状突起55gは、下側円周状突起55dに同心状でかつ内側に設けられる。更に、第2の下側円周状突起55gは、ドーム部55eを介して、円周状突起55cと一体化して設けられ、下側円周状突起55dより長足に形成されている。即ち、第2の下側円周状突起55gと下側円周状突起55dは、第2のプリント基板44へ向かう長さが異なるように構成される。そのため、前ペダル27が押下され円周状突起55cが降下すると、まず先に第2の下側円周状突起55gが荷重を下方に伝えることになる。
【0068】
第2の下側円周状突起55gの下部には複数のメンブレンスイッチが第2の下側円周状突起55gに対応して円周状に形成されている。メンブレンスイッチは、第2のプリント基板44側の第2の可動接点44uと第1のプリント基板33側の第2の固定接点33uにより構成される。図15(a)に示すように、この第2の可動接点44uと第2の固定接点33uを閉じるのは、第2の下側円周状突起55gにより行われる。
【0069】
更にラバードーム55の押下が進むと、図15(b)に示すように、短足の下側円周状突起55dが荷重を下方に伝えることになる。下側円周状突起55dの下部にある複数のメンブレンスイッチが下側円周状突起55dに対応して円周状に形成されている。この場合のメンブレンスイッチは、第2のプリント基板44側の可動接点44sと第1のプリント基板33側の固定接点33sにより構成される。メンブレンスィッチを直接的に押下するのは図示するように円周状突起55cと一体化している下側円周状突起55dにより行われることになる。
【0070】
長さが異なる第2の下側円周状突起55gと下側円周状突起55dの下部にそれぞれメンブレンスイッチが設けられる。これによって、前ペダル27に加えられる荷重の変化が検出可能となり、前ペダル27の押下の強弱でカーソル移動量を変化させることが可能となる。
【0071】
(第3の実施の形態)
次に第3の実施の形態について説明する。図16は本発明の第3の実施の形態に関わるポインティングデバイスを示す断面説明図である。第3の実施の形態に関わるポインティングデバイス41において、ロワーカバー42は基板43を支持する。基板43はその中央にスティックポインタ49を搭載している。スティックポインタ49の軸49aは先端に前ペダル47と一体に固定されている。前ペダル47は操作者の足が載置可能となっている。
【0072】
操作者が足で前ペダル47を所定の方向に荷重を加えると、スティックポインタ49の軸49aが撓み、スティックポインタ49これを検出する。スティックポインタ49が行う検出方式は公知の方式でよく、例えば静電容量方式で可能である。更に、スティックポインタ49が受ける荷重量はセンサ出力に比例することができるため、スティックポインタ49は操作荷重の大小を検出可能となる。図示しない制御部は、これを加速度に変更する。これにより、ポインティングデバイス41は、カーソル移動方向情報及び加速度情報を上位装置PCに出力することができる。
【0073】
(第4の実施の形態)
次に第4の実施の形態について説明する。図17は本発明の第4の実施の形態に関わるポインティングデバイスを示す断面説明図である。第4の実施の形態に関わるポインティングデバイス51において、ロワーカバー52はその中央に支柱59を有し、支柱59は先端に前ペダル57と一体に固定され前ペダル57を支持している。前ペダル57の上面は操作者の足が載置可能となっている。そして、前ペダル57の下面には、加速度センサ58が配置されている。
【0074】
操作者が足で前ペダル57を所定の方向に荷重を加えると、支柱59が撓み、前ペダル57の下面に配置されている加速度センサ58が前ペダル57の傾き方向を検出する。加速度センサ58は3軸方向を検出可能である。加速度センサ58が受ける荷重量はセンサ出力に比例することができるため、加速度センサ58は操作荷重の大小を検出可能となる。これにより、ポインティングデバイス51は、カーソル移動方向情報及び加速度情報を上位装置PCに出力することができる。
【0075】
なお、上記実施の形態は足用のポインティングデバイスとして説明したが、これに限らない。前ペダル7と後方ペダル17は外部からの荷重を受けるペダル部として機能する。
【符号の説明】
【0076】
1 ポインティングデバイス
1a 第1の載足部
1b 第2の載足部
2 ロワーカバー
3 第1のプリント基板
4 第2のプリント基板
5 ラバードーム
6 ラバー押え
7 前ペダル
8 メンブレンシート
9 ホームポジションキートップ
17 後方ペダル
PC 上位装置
SW メンブレンスィッチ
【特許請求の範囲】
【請求項1】
外部からの荷重を受けるペダル部と、
前記ペダル部を傾斜可能に支持するとともに、前記ペダル部からの荷重を下方に伝える円周状突起を有するラバードーム部と、
円周状に設けた複数の固定接点を有する第1のプリント基板と、
前記第1のプリント基板の前記複数の固定接点に対向し、かつ前記円周状突起の下方に設けられた可動接点を有する第2のプリント基板と、
前記第1のプリント基板の前記固定接点と前記第2のプリント基板の前記可動接点を含んで構成されるメンブレンスィッチと、
前記メンブレンスィッチが閉じたことを検知することによって、カーソル移動方向情報を上位装置へ送信する制御部を有することを特徴とするポインティングデバイス。
【請求項2】
前記制御部は、閉じた前記メンブレンスィッチの位置及び接点数から前記カーソル移動方向情報及び加速度情報を判定することを特徴とする請求項1記載のポインティングデバイス。
【請求項3】
前記第1のプリント基板に設けた前記複数の固定接点数は36であり、前記制御部が上位装置へ送信するカーソル移動方向は8方向であることを特徴とする請求項1又は2記載のポインティングデバイス。
【請求項4】
前記複数の固定接点数36を前記カーソル移動方向に対応する8グループに分け、前記閉じた前記固定接点が複数で、かつ閉じた複数の前記固定接点が隣接する前記グループに跨る場合、前記制御部は固定接点数が多い前記グループを前記カーソル移動方向として決定することを特徴とする請求項3記載のポインティングデバイス。
【請求項5】
前記ペダル部の中央に設けた小穴と、
前記小穴を通って設けられるホームポジションキートップと、
前記ラバードーム部の中央に設けられ、前記ホームポジションキートップを上下動可能に支持するとともに、前記ホームポジションキートップからの荷重を下方に伝える中央突起と、
前記第1のプリント基板の中央に設けられた中央固定接点と、
前記第2のプリント基板の中央であって、前記中央固定接点に対向して設けられ、かつ前記中央突起の下方に設けられた中央可動接点を有し、
前記制御部は、前記中央固定接点及び中央可動接点が閉じたことを検知することによって、ホームポジション信号を上位装置へ送信することを特徴とする請求項1記載のポインティングデバイス。
【請求項6】
前記第1のプリント基板は、前記円周状に設けた前記複数の固定接点に対し隣接して設けた円周状の複数の第2の固定接点を有し、
前記第2のプリント基板は、前記第1のプリント基板の前記複数の第2の固定接点に対向して設けられた第2の可動接点を有し、
前記ラバードーム部には、前記第2の可動接点に対応して第2の円周状突起が設けられ、
前記制御部は前記ペダル部からの荷重の変化を検出することを特徴とする請求項1記載のポインティングデバイス。
【請求項7】
外部からの荷重を受ける後方ペダル部と、
前記後方ペダル部を傾斜可能に支持するとともに、前記後方ペダル部からの荷重を下方に伝える円周状突起を有する後方ラバードーム部と、
円周状に設けた複数の後方固定接点を有する第1の後方プリント基板と、
前記第1の後方プリント基板の前記後方固定接点に対向し、かつ前記円周状突起の下方に設けられた後方可動接点を有する第2の後方プリント基板と、
前記第1の後方プリント基板の前記後方固定接点と前記第2の後方プリント基板の前記可動接点を含んで構成される後方メンブレンスィッチと、
前記制御部は、前記後方メンブレンスィッチが閉じたことを検知することによって、画面上の決定操作信号を上位装置へ送信することを特徴とする請求項1記載のポインティングデバイス。
【請求項8】
前記第1のプリント基板に設けた前記複数の後方固定接点数は36であり、前記制御部が上位装置へ送信する前記画面上の決定操作信号は左右2信号であることを特徴とする請求項7記載のポインティングデバイス。
【請求項9】
前記後方ペダル部は、前記ペダル部より段差Gだけ低く形成されていることを特徴とする請求項7又は8記載のポインティングデバイス。
【請求項1】
外部からの荷重を受けるペダル部と、
前記ペダル部を傾斜可能に支持するとともに、前記ペダル部からの荷重を下方に伝える円周状突起を有するラバードーム部と、
円周状に設けた複数の固定接点を有する第1のプリント基板と、
前記第1のプリント基板の前記複数の固定接点に対向し、かつ前記円周状突起の下方に設けられた可動接点を有する第2のプリント基板と、
前記第1のプリント基板の前記固定接点と前記第2のプリント基板の前記可動接点を含んで構成されるメンブレンスィッチと、
前記メンブレンスィッチが閉じたことを検知することによって、カーソル移動方向情報を上位装置へ送信する制御部を有することを特徴とするポインティングデバイス。
【請求項2】
前記制御部は、閉じた前記メンブレンスィッチの位置及び接点数から前記カーソル移動方向情報及び加速度情報を判定することを特徴とする請求項1記載のポインティングデバイス。
【請求項3】
前記第1のプリント基板に設けた前記複数の固定接点数は36であり、前記制御部が上位装置へ送信するカーソル移動方向は8方向であることを特徴とする請求項1又は2記載のポインティングデバイス。
【請求項4】
前記複数の固定接点数36を前記カーソル移動方向に対応する8グループに分け、前記閉じた前記固定接点が複数で、かつ閉じた複数の前記固定接点が隣接する前記グループに跨る場合、前記制御部は固定接点数が多い前記グループを前記カーソル移動方向として決定することを特徴とする請求項3記載のポインティングデバイス。
【請求項5】
前記ペダル部の中央に設けた小穴と、
前記小穴を通って設けられるホームポジションキートップと、
前記ラバードーム部の中央に設けられ、前記ホームポジションキートップを上下動可能に支持するとともに、前記ホームポジションキートップからの荷重を下方に伝える中央突起と、
前記第1のプリント基板の中央に設けられた中央固定接点と、
前記第2のプリント基板の中央であって、前記中央固定接点に対向して設けられ、かつ前記中央突起の下方に設けられた中央可動接点を有し、
前記制御部は、前記中央固定接点及び中央可動接点が閉じたことを検知することによって、ホームポジション信号を上位装置へ送信することを特徴とする請求項1記載のポインティングデバイス。
【請求項6】
前記第1のプリント基板は、前記円周状に設けた前記複数の固定接点に対し隣接して設けた円周状の複数の第2の固定接点を有し、
前記第2のプリント基板は、前記第1のプリント基板の前記複数の第2の固定接点に対向して設けられた第2の可動接点を有し、
前記ラバードーム部には、前記第2の可動接点に対応して第2の円周状突起が設けられ、
前記制御部は前記ペダル部からの荷重の変化を検出することを特徴とする請求項1記載のポインティングデバイス。
【請求項7】
外部からの荷重を受ける後方ペダル部と、
前記後方ペダル部を傾斜可能に支持するとともに、前記後方ペダル部からの荷重を下方に伝える円周状突起を有する後方ラバードーム部と、
円周状に設けた複数の後方固定接点を有する第1の後方プリント基板と、
前記第1の後方プリント基板の前記後方固定接点に対向し、かつ前記円周状突起の下方に設けられた後方可動接点を有する第2の後方プリント基板と、
前記第1の後方プリント基板の前記後方固定接点と前記第2の後方プリント基板の前記可動接点を含んで構成される後方メンブレンスィッチと、
前記制御部は、前記後方メンブレンスィッチが閉じたことを検知することによって、画面上の決定操作信号を上位装置へ送信することを特徴とする請求項1記載のポインティングデバイス。
【請求項8】
前記第1のプリント基板に設けた前記複数の後方固定接点数は36であり、前記制御部が上位装置へ送信する前記画面上の決定操作信号は左右2信号であることを特徴とする請求項7記載のポインティングデバイス。
【請求項9】
前記後方ペダル部は、前記ペダル部より段差Gだけ低く形成されていることを特徴とする請求項7又は8記載のポインティングデバイス。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】

【図9】
【図10】

【図11】
【図12】

【図13】

【図14】

【図15】
【図16】
【図17】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−190365(P2012−190365A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−54878(P2011−54878)
【出願日】平成23年3月13日(2011.3.13)
【出願人】(509334217)金井電器産業株式会社 (2)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月13日(2011.3.13)
【出願人】(509334217)金井電器産業株式会社 (2)
【Fターム(参考)】
[ Back to top ]