
ポジトロン放射断層撮影システム、再構成装置及び距離比決定方法
【課題】非均一なアーティファクトを取り除くことができるポジトロン放射断層撮影システム、再構成装置及び距離比決定方法を提供すること。
【解決手段】実施形態に係るポジトロン放射断層撮影システムでは、決定部は、システムのX−Y平面内で、2つの結晶それぞれの左端点を結ぶ第1の稜線と、2つの結晶それぞれの右端点を結ぶ第2の稜線と、同時計数管に関する基準線とを決定する。投影部は、ボクセルの第1の面の第1の中心点を基準線に投影して第1の投影点を規定し、ボクセルの第2の面の第2の中心点を基準線に投影して第2の投影点を規定する。計算部は、第1の稜線を含む直線と基準線との交点及び第2の稜線を含む直線と基準線との交点のいずれか一方と第1の投影点との間の第1の距離と、当該一方の交点と第2の投影点との間の第2の距離とを計算する。距離比決定部は、第1及び第2の距離に基づいて、X−Y平面における第1の距離比を決定する。
【解決手段】実施形態に係るポジトロン放射断層撮影システムでは、決定部は、システムのX−Y平面内で、2つの結晶それぞれの左端点を結ぶ第1の稜線と、2つの結晶それぞれの右端点を結ぶ第2の稜線と、同時計数管に関する基準線とを決定する。投影部は、ボクセルの第1の面の第1の中心点を基準線に投影して第1の投影点を規定し、ボクセルの第2の面の第2の中心点を基準線に投影して第2の投影点を規定する。計算部は、第1の稜線を含む直線と基準線との交点及び第2の稜線を含む直線と基準線との交点のいずれか一方と第1の投影点との間の第1の距離と、当該一方の交点と第2の投影点との間の第2の距離とを計算する。距離比決定部は、第1及び第2の距離に基づいて、X−Y平面における第1の距離比を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、ポジトロン放射断層撮影システム、再構成装置及び距離比決定方法に関する。
【背景技術】
【0002】
従来、ポジトロン放射断層撮影システムでは、PET画像を再構成するプロセスにおいて、特定のアルゴリズムを用いて、同時計数線(LOR:Line Of Response)又は同時計数管(TOR:Tube Of Response)及びボクセルに対する検出確率が計算される。ここでいう検出確率とは、ボクセルから放出される光子が任意の一対の結晶によって検出される確率である。この検出確率を計算するための要素には、LOR又はTORとボクセルとの間の幾何確率(幾何効率とも呼ばれる)が含まれるが、この幾何確率を計算する際の計算誤差によって、非均一なアーティファクトが生じる場合がある。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Jurgen J.Scheins,et al., "Analytical Calculation of Volumes-of-Intersection for Iterative,Fully 3-D PET Reconstruction",IEEE Transactions on Medical Imaging,Vol.25,No.10,pp.1363-1369,October 2006
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、非均一なアーティファクトを取り除くことができるポジトロン放射断層撮影システム、再構成装置及び距離比決定方法を提供することである。
【課題を解決するための手段】
【0005】
実施形態に係るポジトロン放射断層撮影システムは、ポジトロン放射断層撮影システムの再構成空間内に2つの結晶によって規定される同時計数管とボクセルとの間の幾何確率を計算するために用いられる距離比を決定するものであって、決定部と、投影部と、計算部と、距離比決定部とを備える。決定部は、前記ポジトロン放射断層撮影システムのX−Y平面内で、前記2つの結晶それぞれの左端点を結ぶ第1の稜線と、前記2つの結晶それぞれの右端点を結ぶ第2の稜線と、前記同時計数管に関する基準線とを決定する。投影部は、前記X−Y平面内で、前記ボクセルの第1の面の第1の中心点を前記基準線に投影して第1の投影点を規定し、前記ボクセルの第2の面の第2の中心点を前記基準線に投影して第2の投影点を規定する。計算部は、前記第1の稜線を含む直線と前記基準線との交点及び前記第2の稜線を含む直線と前記基準線との交点のいずれか一方の交点と前記第1の投影点との間の第1の距離と、前記一方の交点と前記第2の投影点との間の第2の距離とを計算する。距離比決定部は、前記第1の距離及び前記第2の距離に基づいて、前記X−Y平面における第1の距離比を決定する。
【図面の簡単な説明】
【0006】
本開示は、以下の説明を読むこと、及び添付図面を検討することにより、よりよく理解されるであろう。なお、これらの図は、実施形態の非制限的な実施例として単に提供するものである。
【0007】
【図1】図1は、ポジトロン放射断層撮影(PET:Positron Emission Tomography)検出器のリングを示す図である。
【図2A】図2Aは、幾何確率を計算する様々な方法を示す図である。
【図2B】図2Bは、幾何確率を計算する様々な方法を示す図である。
【図2C】図2Cは、幾何確率を計算する様々な方法を示す図である。
【図3A】図3Aは、ボクセルの交差面積を計算するための2次元(2D)法を示す図である。
【図3B】図3Bは、ボクセルの交差面積を計算するための2次元(2D)法を示す図である。
【図3C】図3Cは、ボクセルの交差面積を計算するための2次元(2D)法を示す図である。
【図4A】図4Aは、距離比を計算するための平面を選定するための実施形態を示す図である。
【図4B】図4Bは、距離比を計算するための平面を選定するための実施形態を示す図である。
【図5A】図5Aは、投影のためのボクセルの適切な辺を選定するための実施形態を示す図である。
【図5B】図5Bは、投影のためのボクセルの適切な辺を選定するための実施形態を示す図である。
【図5C】図5Cは、投影のためのボクセルの適切な辺を選定するための実施形態を示す図である。
【図6A】図6Aは、距離比及び幾何確率を計算するための実施形態を示す図である。
【図6B】図6Bは、距離比及び幾何確率を計算するための実施形態を示す図である。
【図7A】図7Aは、結晶の辺の選定及びボクセルの中心の投影方向を示す図である。
【図7B】図7Bは、結晶の辺の選定及びボクセルの中心の投影方向を示す図である。
【図8A】図8Aは、本開示の方法のフローチャートを示す図である。
【図8B】図8Bは、本開示の方法のフローチャートを示す図である。
【図9A】図9Aは、平行ビーム単一光子放射コンピュータ断層撮影(SPECT:Single Photon Emission Computed Tomography)イメージング装置への本開示の方法の適用を示す図である。
【図9B】図9Bは、平行ビーム単一光子放射コンピュータ断層撮影(SPECT:Single Photon Emission Computed Tomography)イメージング装置への本開示の方法の適用を示す図である。
【図10】図10は、本開示の実施形態を実装するコンピュータシステムを示す図である。
【発明を実施するための形態】
【0008】
本明細書に記載の実施形態は、医療イメージング装置における3次元再構成において、エリアシミュレーティングボリュームシステムモデルを利用した前方及び後方投影に関する。
【0009】
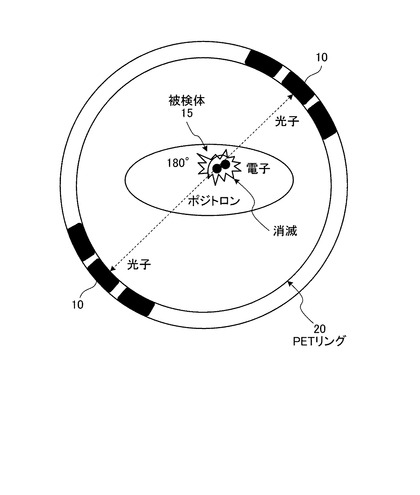
ポジトロン放射断層撮影(PET:Positron Emission Tomography)の利用は、医用イメージングの分野において増加している。PETイメージングでは、注射、吸入、又は経口摂取によって放射性薬剤が、図1に示す撮像対象の被検体15に注入される。放射性薬剤の投与後、薬剤は、その物理的性質及び分子生物学的性質によって人体(すなわち、被検体15)内の特定の部位に集中する。薬剤の実際の空間分布、薬剤の蓄積度合い、及び投与されてから最終的に排出されるまでのプロセスの動態は、全て、臨床的有意性を有しうる因子である。このプロセスにおいて、放射性薬剤に付着させたポジトロン放射体は、半減期、分岐比等の同位体の物理的性質に応じてポジトロンを放出する。
【0010】
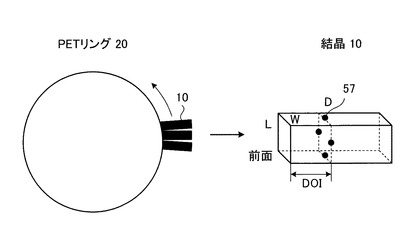
放射性核種はポジトロンを放出し、放出されたポジトロンが電子と衝突すると消滅事象が生ずる。そして、衝突によってポジトロンと電子は消滅する。多くの場合、消滅事象によって略180度方向に放出される2つの511keVのガンマ光子が発生し、これらがPETリング20に設けられた1対の結晶10によって検出される。1対の結晶10の中心間を結ぶ線、すなわち同時計数線(LOR:Line Of Response)を引くことによって、又は、1対の結晶10の対応する頂点を結ぶことで形成される多面体、すなわち同時計数管(TOR:Tube Of Response)を描くことによって、高い確率で元の消滅位置を探し出すことができる。このプロセスは相互作用が起こっている可能性のある線(又は管)を識別するに過ぎないが、これらの線(又は管)を数多く蓄積することによって、そして、断層を再構成するプロセスを用いることによって、元の分布を推定することができる。上記2つのシンチレーション事象の位置の他に、正確なタイミング(数百ピコ秒以内)が利用可能であれば、飛行時間(TOF:Time Of Flight)を計算することによって、それらの事象が生じた確率の高い、上記の線(又は管)に沿ったその位置に関する更なる情報を加えることができる。
【0011】
上記の検出プロセスは、多数の消滅事象について反復される必要がある。そのイメージング処理を実行可能にするために必要な回数(すなわち、事象の対)を決定するには、ひとつひとつのイメージング事例を解析する必要があるが、数億の回数を重ねる必要があるというのが、典型的な長さ100cmのフルオロデオキシグルコース(FDG:fluorodeoxyglucose)の研究での現在の運用である。これだけの回数を重ねるのにかかる時間は、薬剤の注入量及びスキャナの感度と計数能力によって決まる。
【0012】
要するに、PET再構成プロセスによって、(既知の)PETシステムにおいて記録されたデータから被検体内の(未知の)同位元素の量と位置が分かる。PET再構成プロセスにおける基本的な課題のひとつは検出確率を求めることであり、この検出確率とはボクセルから放出される光子が任意の1対の結晶10により検出できる確率を示す。
【0013】
この課題に取り組むために、特定のアルゴリズムがLORi又はTORi及び特定のボクセルjに対する検出確率aijを計算するよう設計されている。反復型のオーダーサブセット期待値最大化(OSEM:Ordered Subset Expectation Maximization)再構成において使用される一般式を式(1)に示す。
【0014】
【数1】

【0015】
式(1)において、aijはボクセルjがTORiに寄与する確率であり、QjはSubtに渡り全ての可能なaijを合計することによる正規化項であり、fjはボクセルjの活量であり、YiはTORi内で検出された光子を示し、Subtはt番目のサブセットであり、Ri及びSiはそれぞれTORiに沿った偶発同時計数及び散乱同時計数である。
【0016】
式1において、aijは一般に異なる物理的効果に応じて、式(2)に示すように多数の成分に分解することができる。
【0017】
aij=cij×感度ij×解像度ij×減衰度i×TOFij ・・・(2)
【0018】
ここで、cijは幾何確率であり、aijの重要な係数であり、また本明細書で開示する実施形態により計算される。
【0019】
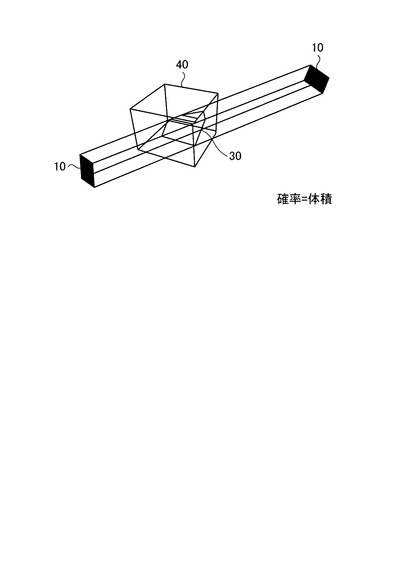
cijの解析計算のほとんどで、放射性原子核はボクセル内に均一に分布することが暗黙の前提である。したがって、確率cijはTORとボクセルとが交差する体積に比例する。1つのボクセルの体積が単位体積である場合、cijは式(3)に示すように交差体積で直接表すことができる。
【0020】
【数2】
【0021】
実際には、特に円錐ビームX線コンピュータ断層撮影(CT:Computed Tomography)、円錐、扇状、又は平行ビーム単一光子放射コンピュータ断層撮影(SPECT:Single Photon Emission Computed Tomography)、及びPET等の非平行配列のシステムにおいて、交差体積は必ずしも容易に計算されるわけではない。
【0022】
定量的にPET画像を再構成するためには、できる限り正確なシステム応答マトリクスが必要である。このため、基本要件は幾何確率を正確に計算することである。また、診療現場では再構成の早さも非常に重要である。したがって、この要件を満足するために迅速かつ正確なアルゴリズムが必要である。
【0023】
本開示は、医用イメージング装置の再構成空間内に2つの結晶によって規定されるTORとボクセルとの間の幾何確率を計算するために用いられる距離比を計算するための方法、装置、及びシステムについて説明するものである。この方法は、医用イメージング装置のX−Y平面において2つの結晶のそれぞれの左端点を結ぶ第1の稜線であって、左端点間の中間に位置する第1の中間点を含む第1の稜線を決定するステップと、X−Y平面において2つの結晶のそれぞれの右端点を結ぶ第2の稜線であって、右端点間の中間に位置する第2の中間点を含む第2の稜線を決定するステップと、X−Y平面においてTORの中間線を第1の中間点及び第2の中間点と交差する線として決定するステップと、X−Y平面において、第1の投影点を規定するためにボクセルの第1の面の第1の中心点を第1の稜線の方向に沿って中間線に投影するステップと、X−Y平面において、第2の投影点を規定するためにボクセルの第2の面の第2の中心点を第2の稜線の方向に沿って中間線に投影するステップと、第1及び第2の中間点の一方と第1の投影点との間の第1の距離と、第1及び第2の中間点の前記一方と第2の投影点との間の第2の距離とを計算するステップと、X−Y平面において第1の距離比を第1の距離及び第2の距離に基づき決定するステップとを含む。
【0024】
本開示の方法は、同時計数線を規定する2つの結晶のそれぞれについて中心を決定するステップをさらに含む。また、この方法は、ボクセルの第1の面の第1の中心点及びボクセルの第2の面の第2の中心点を、同時計数線とX−Y平面における正のX軸との間の角度に基づき決定するステップを含む。
【0025】
加えて、この方法は、医用イメージング装置のY−Z平面又はX−Z平面において2つの結晶のそれぞれの前端点を結ぶ第3の稜線であって、第1のz線点を含む第3の稜線を決定するステップと、Y−Z平面又はX−Z平面において2つの結晶のそれぞれの後端点を結ぶ第4の稜線であって、第2のz線点を含む第4の稜線を決定するステップと、Y−Z平面又はX−Z平面においてZ軸に平行なTORのz線を第1のz線点及び第2のz線点と交差する線として決定するステップと、Y−Z平面又はX−Z平面において、第3の投影点を規定するためにボクセルの第3の面の第3の中心点を第3の稜線の方向に沿ってz線に投影するステップと、Y−Z平面又はX−Z平面において、第4の投影点を規定するためにボクセルの第4の面の第4の中心点を第4の稜線の方向に沿ってz線に投影するステップと、第1及び第2のz線点の一方と第3の投影点との間の第3の距離と、第1及び第2のz線点の一方と第4の投影点との間の第4の距離とを計算するステップと、Y−Z平面又はX−Z平面において第2の距離比を第3の距離及び第4の距離に基づき決定するステップとを含む。
【0026】
さらに、本開示の方法は、第1の距離比に第2の距離比を乗ずることにより交差体積を計算するステップも含む。また、この方法は、ボクセルの第1の面及びボクセルの第2の面がボクセルの相対する側にあること、及びボクセルの第3の面及びボクセルの第4の面がボクセルの相対する側にあることについても説明している。
【0027】
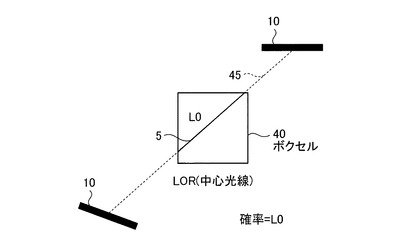
上述したように、交差体積30(図2A〜2Cに示す)を容易に計算することはできない。したがって、実現の困難性を克服するために、又は、実用的な時間内で計算を行うために、多くの近似法が用いられている。前述の方法は、図2A〜2Cに示すように3つのカテゴリに分類することができる。1次元(1D)法は、交差線の長さ5を計算する、すなわち(単一光又は多重光の)線−長さモデル又は点−格子モデル等の線形補間である。図2Aは、単一光の線−長さモデルの例である。
【0028】
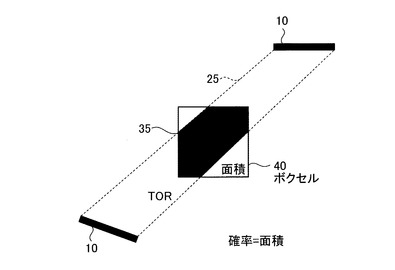
図2Bは、ボクセル40の正確又は概算の交差面積35を計算する2次元(2D)法の例である。この方法には、三角形差分法、細長片−面積モデル、ガウス補間、回転補間(図3Aに示す)、距離駆動型の方法(図3Bに示す)、及び面積で重み付けされた畳み込み補間が含まれる。CTにおいて用いられる1つの2D法は、いわゆる距離駆動型の方法であり、図3Bに示すように検出器ビン及びボクセル40の辺を所定の面上に投影し、重なり合う面積を計算する。この方法は3D法と比べ優れた画質を提供する。
【0029】
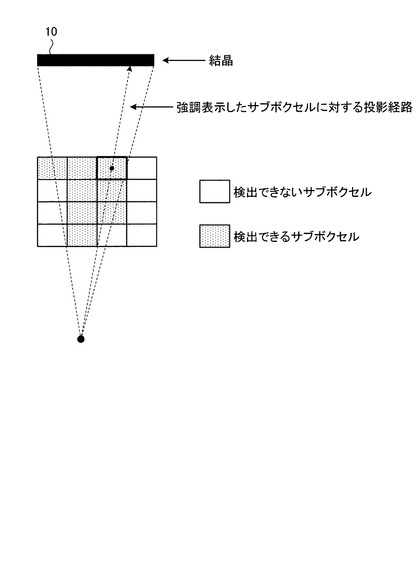
他の2つの方法と比べて、3次元(3D)法は、最も高い画像品質と定量的精度を提供する。図2Cは、ボクセル40の正確な又は概算の交差体積30を計算する3D法の一例を示す。この方法には、全ての交差する点を求めて交差体積を計算する解析アルゴリズム、及び、図3Cに示すようにボクセルを多数のサブボクセルに細分して結晶10内部に投影されたサブボクセルの中心の数を数える細分化アルゴリズムが含まれる。細分化アルゴリズムの誤差を計算するために、式(4)を用いてもよい。
【0030】
誤差≦(2N2−4)/N3 ・・・(4)
【0031】
例えば、Nが32に等しければ、誤差は6.2%以下である。
【0032】
しかしながら、上述の方法は特定の欠点を有する。例えば、1D及び2D法は速いが、特に現在一般的に用いられている3DのPET再構成において定量的精度に劣り、度々アーティファクトを導く。さらに、3D法は幾何確率を計算するのに比較的長い時間を要し、これが商品への適用の妨げとなっている。細分化法は典型的な低速3Dアルゴリズムである。例えば、20リングのPETシステム及び128×128×20個のボクセルのあらゆる可能なLORに対する幾何確率を生成するために、8つの中央処理装置(Central Processing Unit:CPU)を使用する場合でも、323個のサブボクセルを使用して約134時間かかる。さらに、距離駆動型の方法は、CTへの適用で用いられるが、PETへの適用にはまだ及ばず使用されていない。加えて、距離駆動型の方法を直接使用すると、PETにおけるアーティファクトと非対称性問題が生じる。
【0033】
本開示の実施形態は、TOR25とボクセル40が重なり合う面積を計算し、この面積を3DのPET再構成におけるシステム応答マトリクスに概算の交差体積30として適用する。本開示の実施形態のアルゴリズムはエリアシミュレーティングボリューム(area-simulating-volume:ASV)アルゴリズムと呼ばれ、この中で面積がX−Y平面及びY−Z(又はX−Z)平面における2つの距離比の積としてそれぞれ計算される。
【0034】
円筒形のPETシステムにおいて、TOR25が6つの平面(すなわち、2つの検出器平面、及び1対の結晶10の8つの頂点を結ぶことによって形成される4つの平面)で形成される。ほとんどの場合いずれの2つの結晶も互いに平行ではなく、そのため、他の4つの平面は、いくつかの特殊な場合を除き多くの場合で対向する平面と平行ではない。この幾何学的な特殊性により、距離比を計算する際に特定の方法が必要であり、この点で本開示の実施形態はCTで用いられる上述の方法と異なる。
【0035】
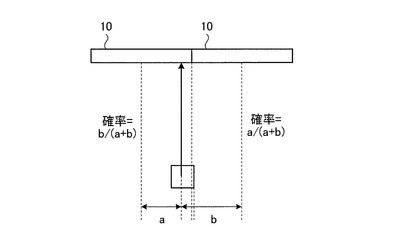
[共通平面の選択]
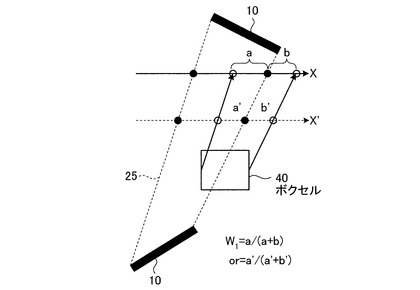
ASVアルゴリズムの1つのステップは、距離比を計算するための適切な共通平面を選択、あるいは選定することである。CTで用いられる距離駆動型の方法(distance-driven method)では、固定されたY−Z平面又はX−Z平面が、ボクセル40の辺及び結晶10の辺をマッピングするために用いる共通平面として選択される。この選定により、PET再構成においていくつかのアーティファクトが発生する。この問題は図4Aに示す例で説明することができる。任意のボクセル40がX−Z平面(すなわち、この2Dの例ではX軸)に近づくにつれ、距離比は減少する。このため、この比は共通平面の位置によって変わる。このため、異なるTORは、TORのX−Z平面に対する相対位置によって異なるアルゴリズム誤差を持つ。この場合、非均一な誤差により前方/後方投影において目に見えるアーティファクトが観察される。例えば、TOR1及びTOR2がそれぞれ5%及び2%の計算誤差を持つと仮定する。このとき、TOR1及びTOR2は、誤差無しで100の光子を受けることができると、それぞれ上記の誤差を加えて105及び102の光子を受けることになる。その結果、これらの誤差により非均一なアーティファクトが生じる。アルゴリズム誤差が均一(例えば、3%)であれば、2つのTORはアーティファクト無しで同じ数の光子を受けることになる。
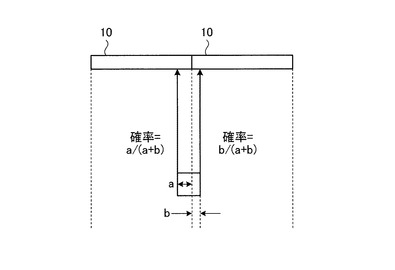
【0036】
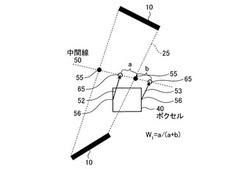
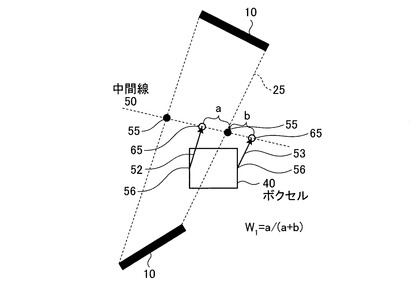
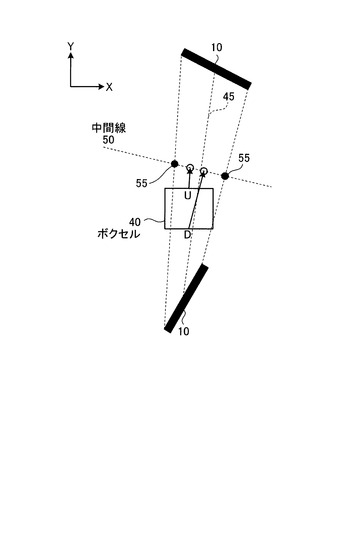
本開示の実施形態では、上述の問題を克服するために、適応性のある共通平面が選定される。この平面は、2つの結晶10の稜線上の2つの中間点55を通過し、X−Y平面に垂直である。例えば、図4Bにおいて、共通平面は中間線50に沿っている(すなわち、中間線50に沿ってページに垂直である)。適応性のある共通平面はTORごとに異なるが、常にTOR25の中心に位置することができる。なお、ASV法は多面体形状を持つTORに適用できる。このため、この方法は、上述の非均一なアーティファクトを取り除くことが可能な均一なアルゴリズム誤差を提供することができる。
【0037】
[ボクセルの辺の選択]
ASVアルゴリズムは近似法であり、アルゴリズム自体によって誤差を生じることがある。したがって、アルゴリズム誤差を最小化して、幾何確率を真の値に近づける必要がある。マッピングプロセスにおいて、ボクセル40の適切な辺を選択又は選定することは、アルゴリズム誤差を最小化する際の重要なステップである。
【0038】
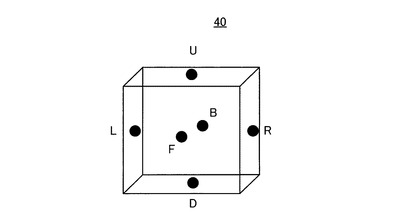
ASVアルゴリズムにおいて、ボクセルの辺は面の中心に基づいて選定される。特に、各ボクセル40は6つの面を有し、そのため面の中心を6つ有する(図5Aにおいて、L、R、U、D、F、Bで示す)。6つの中心のうち4つが、共通平面に投影されて交差面積を形成する。本開示の実施形態では、投影プロセスは2つのステップに分けられる。
【0039】
第1のステップでは、ボクセル40の2つの中心点56が、X−Y平面において共通平面の中間線50(図4B参照)に投影されて、投影点65が形成される。矢印52及び53は、前述のボクセル40からの投影を示すために用いられる。矢印52はTOR25の左側の稜線に平行であり、矢印53はTOR25の右側の稜線に平行である。
【0040】
第2のステップでは、ボクセル40の他の2つの中心点56が、Y−Z平面又はX−Z平面においてZ軸に平行な線に投影される。
【0041】
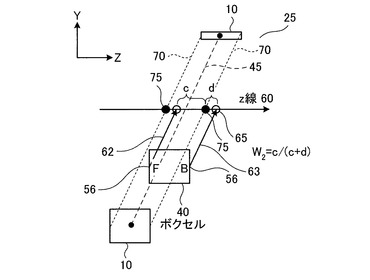
図6Aに示すように、矢印62及び63は、前述のボクセル40からの投影を示すために用いられる。矢印62はTOR25の左側の稜線70に平行であり、矢印63はTOR25の右側の稜線70に平行である。詳細は以下の[距離比及び幾何確率の計算]の項に示す。
【0042】
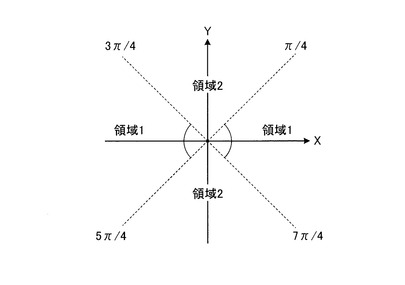
第1のステップにおいて、2つの中心点56が、TOR25の向きに応じてL−R又はU−Dから選択又は選定される。(2つの結晶10の中心を結ぶ)中心線45と+X軸との間の角度が、選定すべき中心(L−R又はU−D)を決定する。図5Bは、前述の角度が位置するかもしれない様々な領域を示す。例えば、(2つの結晶10の中心を結ぶ)中心線45と+X軸との間の角度が領域1の中に位置する場合、中心U及びDが選定され、その他では中心L及びRが選定される。次の例で、この選定の理由を明らかにすることができる。図5Cは、UとDが誤って選定された例を示す。このため、図5CではLとRの代わりにUとDが選定されると、中間点55と中心点56との間の距離比が1に等しくなる。しかし、交差体積30は1に等しくはならない。
【0043】
第2のステップでは、中心F及びBが投影対象として常に選択、又は選定される。しかしながら、Y−Z平面又はX−Z平面の選定は、中心線45と+Z軸との間の角度に応じて決まる。角度が領域1の中にあれば、X−Z平面が選定され、その他であればY−Z平面が選定される。
【0044】
[距離比及び幾何確率の計算]
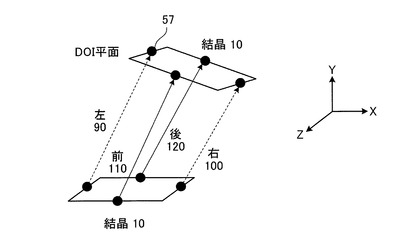
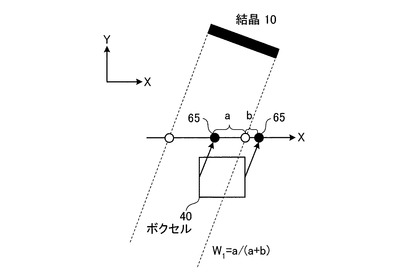
ボクセル40の辺(すなわち、面の中心)が決定された後、ASVアルゴリズムがこれらの中心点56を特定の方向に沿って中間線50又は(後述の)z線60に投影することにより、投影点65が形成される。投影方向を決定するために、4つの中点57が各結晶の平均の相互作用の深さ(depth-of-interaction:DOI)における平面上の長方形の辺(図7Aに示す)から選定される。この平均のDOIにおける平面は、光子と結晶の相互作用の平均深さ(例えば、結晶10の長さの40%)によって決定される。そして、投影方向が以下のように与えられる。すなわち図7Bに示すように、左90及び右100の線がX−Y平面におけるボクセル40のL(又はU)及びR(又はD)の投影方向を決定し、前110及び後120の線がY−Z/X−Z平面におけるボクセル40のF及びBの投影方向を決定する。
【0045】
上述したように、中心L−R又はU−Dが中間線50に投影され、図6Aに示すように、中心F−BがZ軸に平行な線(「z線」60と呼ぶ)に投影される。F−Bを投影するためにz線60を選ぶ理由は、Y−Z平面又はX−Z平面に投影された後にTOR25の2つの結晶10が2つの長方形(又はセグメント)を形成するからである。この場合、2つの結晶10の中心点を結ぶ中心線45は、結晶10の左側又は右側の側面の中間点を結ぶ他の2つの線70に平行であり、図6Aに示すようになる。したがって、距離比はz線60の位置に左右されず、非均一なアーティファクトが発生しない。なお、z線60上の点75は、中間線50上の点55と一致してもよく、中間線50上の点55と異なっていてもよい。
【0046】
なお、ボクセル40がTOR25の稜線の間に位置するとき、距離比は1に等しい。
【0047】
ASVアルゴリズムでは、幾何確率が距離比W1とW2の積に等しく、図4B及び図6Aに示すように、X−Y平面及びY−Z(又はX−Z)平面において計算される。すなわち、以下の式(5)で計算される。
【0048】
【数3】
【0049】
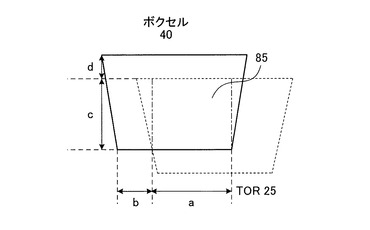
図6Bは、ボクセル40の共通平面への投影、及びTORと共通平面とが交差する形状を示す。こうして、a×cが共通平面におけるボクセル40とTOR25との交差面積85である。1つの実施形態において、この交差部分の高さが、いつもそうとは限らないものの、単位長さであると想定されている。そのため、cijは交差体積30になる。この概念が、本開示のアルゴリズムが「エリアシミュレーティングボリューム」と呼ばれる理由である。
【0050】
要するに、本開示の実施形態は、TORとボクセルとが重なり合う面積を計算し、算出した重なり合う面積を3DのPET再構成におけるシステム応答マトリクスに概算の交差体積として適用する。ASVアルゴリズムは、この面積をそれぞれX−Y及びY−Z(又はX−Z)平面における2つの距離比の積として計算する。X−Y平面における距離比を計算する1つの例には、以下が含まれる。1)TORの2つの稜線の中間点を結ぶ線であるTORの中間線を求める。2)ボクセルの辺の2つの中心点を2つの稜線に沿って中間線に投影する。3)2つの中間点と2つの投影点との間の距離比を求める。
【0051】
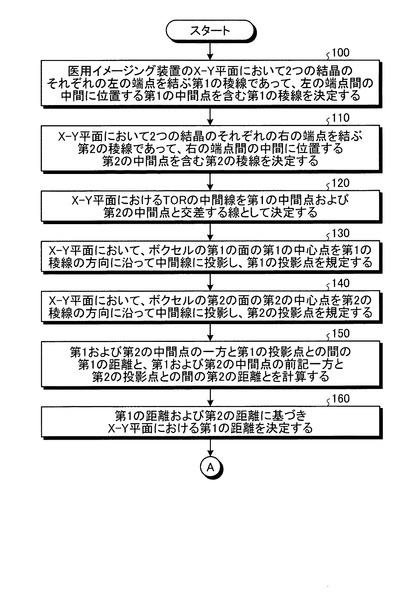
図8A及び8Bは、PET等の医用イメージング装置の再構成空間内で、ボクセル40と2つの結晶10によって規定されるTOR25との間の幾何確率を計算するために用いられる距離比を計算するための方法を示す。ステップ100で、医用イメージング装置のX−Y平面において2つの結晶のそれぞれの左の端点を結ぶ第1の稜線であって、左の端点間の中間に位置する第1の中間点を含む第1の稜線が決定される。ステップ110で、X−Y平面において2つの結晶のそれぞれの右の端点を結ぶ第2の稜線であって、右の端点間の中間に位置する第2の中間点を含む第2の稜線が決定される。
【0052】
次に、ステップ120で、第1の中間点及び第2の中間点と交差する線である、X−Y平面におけるTORの中間線が決定される。ステップ130で、ボクセルの第1の面の第1の中心点が、X−Y平面において、第1の稜線の方向に沿って中間線に投影され、第1の投影点が規定される。そして、ステップ140で、ボクセルの第2の面の第2の中心点が、X−Y平面において、第2の稜線の方向に沿って中間線に投影され、第2の投影点が規定される。
【0053】
ステップ150で、第1及び第2の中間点の一方と第1の投影点との間の第1の距離が計算され、第1及び第2の中間点の前記一方と第2の投影点との間の第2の距離も計算される。次に、ステップ160で、第1の距離及び第2の距離に基づくX−Y平面における第1の距離比が決定される。
【0054】
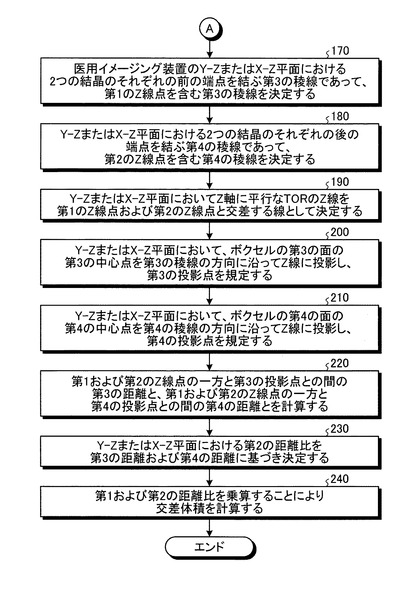
さらに、ステップ170で、医用イメージング装置のY−Z平面又はX−Z平面における2つの結晶のそれぞれの前の端点を結ぶ第3の稜線であって、第1のz線点を含む第3の稜線が決定される。ステップ180で、Y−Z平面又はX−Z平面における2つの結晶のそれぞれの後の端点を結ぶ第4の稜線であって、第2のz線点を含む第4の稜線が決定される。
【0055】
次に、ステップ190で、Y−Z平面又はX−Z平面においてZ軸に平行であり、第1のz線点及び第2のz線点と交差する線であるTORのz線が決定される。ステップ200では、ボクセルの第3の面の第3の中心点が、Y−Z平面又はX−Z平面において、第3の稜線の方向に沿ってz線に投影され、第3の投影点が規定される。そして、ステップ210で、ボクセルの第4の面の第4の中心点が、Y−Z平面又はX−Z平面において、第4の稜線の方向に沿ってz線に投影され、第4の投影点が規定される。
【0056】
ステップ220で、第1及び第2のz線点の一方と第3の投影点との間の第3の距離が計算され、第1及び第2のz線点の一方と第4の投影点との間の第4の距離も計算される。次に、ステップ230で、Y−Z平面又はX−Z平面における第2の距離比が、第3の距離及び第4の距離に基づき決定される。最後に、ステップ240で、交差体積が、第1及び第2の距離比を乗算することにより計算される。
【0057】
本開示の方法は、CTやSPECT等の他の医用イメージング装置に適用してもよい。CTイメージングにおいて、TORの形状が多面体から円錐に等級が下がっても、幾何確率Cijを計算するためにASVアルゴリズムを用いてもよく、これによりむしろアルゴリズムが簡略化されることになる。SPECTイメージングにおいて、TORは、直平行六面体、三角柱からパラレルビームコリメータ、ファンビームコリメータ、又はコーンビームコリメータ用の角錐まで様々な形状にすることができる。多面体TORは全ての上述の形状を含むことができるため、ASVアルゴリズムをほとんど修正せずに使用してもよい。例えば、パラレルビームコリメータを有するSPECTで、2つの距離比がPETのときと同様に計算することができるが、共通平面は今Y=0又はX=0に固定されており、また結晶の辺を結ぶ線が互いに平行であるため、投影方向がボクセルの1対の辺に対して同じである。図9A及び9Bは、パラレルビームコリメータを有するSPECTイメージング装置へのASVアルゴリズムの適用を示す。特に、図9AはX−Y平面における距離比を示し、図9BはY−Z平面における距離比を示す。
【0058】
[画像品質及び計算速度]
エリアシミュレーティングボリュームアルゴリズムは、優れた画像品質を提供し、その品質は3D法(例えば、細分化法)により生成された画像品質に比較的近い。しかし、ASVアルゴリズムにかかる時間は交差体積法よりもかなり短い。例えば、ASVアルゴリズムでは48リングのPETの80の角度に対して全ての幾何確率を生成するために約247秒かかるが、交差体積法では29626秒を要する(4つのCPUを使用して100倍の差がある)。
【0059】
上述のPETシステムの様々な構成要素は、コンピュータシステム又はプログラム可能なロジックを用いて実施することができる。図10は本開示の実施形態を実施してもよいコンピュータシステム1201を示す。コンピュータシステム1201は、再構成装置及び/又はPETシステムの、例えば、様々な処理部(すなわち、決定部、投影部、計算部、距離比決定部、及び交差体積計算部)を含んでもよく、これらが上述のプロセスを実行する。
【0060】
コンピュータシステム1201は、情報及び命令を記憶するための、ハードディスク1207やリムーバブルメディアドライブ1208(例えば、フロッピー(登録商標)ディスクドライブ、読み出し専用コンパクトディスクドライブ、読み出し/書き込みコンパクトディスクドライブ、コンパクトディスクジュークボックス、テープドライブ、及びリムーバブル光磁気ドライブ)等の1つ以上の記憶装置を制御するためにバス1202に結合されたディスク制御部1206を含む。記憶装置は、適切なデバイスインタフェース(例えば、小型コンピュータシステムインタフェース(SCSI:Small Computer System Interface)、統合デバイスエレクトロニクス(IDE:Integrated Device Electronics)、拡張IDE(E−IDE:Enhanced-IDE)、直接メモリアクセス(DMA:Direct Memory Access)、又はUrtra DMA)を使用して、コンピュータシステム1201に追加されてもよい。
【0061】
またコンピュータシステム1201は、専用論理装置(例えば、特定用途向け集積回路(ASIC:Application Specific Integrated Circuit))、又は構成可能論理装置(例えば、単純プログラム可能論理装置(SPLD:Simple Programmable Logic Device)、複雑プログラム可能論理装置(CPLD:Complex Programmable Logic Device)、及びフィールドプログラマブルゲートアレイ(FPGA:Field Programmable Gate Array))を含んでもよい。
【0062】
またコンピュータシステム1201は、コンピュータユーザに情報を表示するためのタッチパネルディスプレイ又は液晶ディスプレイ(LCD:Liquid Crystal Display)等のディスプレイ1210を制御するために、バス1202に結合されたディスプレイ制御部1209を含んでもよい。コンピュータシステムは、コンピュータユーザと対話しプロセッサ1203に情報を提供するためのキーボード1211やポインティングデバイス1212等の入力装置を含む。ポインティングデバイス1212は、例えば、指示情報とコマンド選択とをプロセッサ1203に通信しかつディスプレイ1210上のカーソルの動きを制御するためのマウス、トラックボール、タッチスクリーンセンサに対する指、又はポインティングスティックであってよい。
【0063】
コンピュータシステム1201は、メインメモリ1204等のメモリに含まれる1つ以上の命令の1つ以上のシーケンスを実行するプロセッサ1203に応じて、本開示の処理ステップの一部又は全てを実行する。そのような命令は、ハードディスク1207やリムーバルブメディアドライブ1208等の別のコンピュータ可読媒体からメインメモリ1204に読み込まれてもよい。メインメモリ1204に含まれる命令シーケンスを実行するために、マルチプロセッシング構成の1つ以上のプロセッサを使用してもよい。他の実施形態では、ハードワイヤード回路が、ソフトウェア命令の代わり又はそのソフトウェア命令との組み合わせで使用されてもよい。したがって、実施形態は、ハードウェアの回路構成とソフトウェアとのいずれの特定の組み合わせにも限定されない。
【0064】
上述したように、コンピュータシステム1201は、本開示の教示に従ってプログラムされた命令を保持し、データ構造、テーブル、レコード、又は本明細書に記載の他のデータを収容するための少なくとも1つのコンピュータ可読媒体又はメモリを含む。コンピュータ可読媒体の例は、コンパクトディスク、ハードディスク、フロッピー(登録商標)ディスク、テープ、光磁気ディスク、プログラマブルROM(PROM:Programmable ROM)、(消去可能PROM(EPROM:Erasable PROM)、電気的消去可能PROM(EEPROM:Electrically Erasable PROM)、フラッシュEPROM)、ダイナミックRAM(DRAM:Dynamic RAM)、スタティックRAM(SRAM:Static RAM)、シンクロナスDRAM(SDRAM:Synchronous DRAM)、又は任意の他の磁気媒体、コンパクトディスク(例えば、CD−ROM)、又は任意の他の光学媒体、パンチカード、紙テープ、又は開孔パターンを持つ他の物理媒体である。
【0065】
本開示は、コンピュータシステム1201を制御し、本実施形態を実施するための1又は複数の装置を作動させ、コンピュータシステム1201が人間ユーザと対話できるようにするための、コンピュータ可読媒体のいずれか1つ又は組み合わせに記憶されたソフトウェアを含む。そのようなソフトウェアは、以下に限定されないが、デバイスドライバ、オペレーティングシステム、及びアプリケーションソフトウェアを含んでもよい。そのようなコンピュータ可読媒体は、本実施形態を実施する際に実行される処理の全て又は一部(処理が分散される場合)を実行するための本開示のコンピュータプログラム製品をさらに含む。
【0066】
本実施形態のコンピュータコード装置は、スクリプト、解釈可能プログラム、ダイナミックリンクライブラリ(DLL:Dynamic Link Library)、Java(登録商標)クラス、及び完全実行可能プログラムを含むがこれに限定されない任意の解釈可能又は実行可能なコード機構であってよい。さらに、本実施形態の処理の一部分は、パフォーマンス、信頼性、及び/又はコスト効果を高めるために分散されてもよい。
【0067】
用語「コンピュータ可読媒体」は、本明細書で使用されるとき、実行用のプロセッサ1203に命令を提供することに関する任意の非一時的媒体を指す。コンピュータ可読媒体は、不揮発性媒体や揮発性媒体を含むがこれに限定されない多くの形態をとってもよい。不揮発性媒体には、例えば、ハードディスク1207やリムーバブルメディアドライブ1208等の、光ディスク、磁気ディスク、及び光磁気ディスクが含まれる。揮発性媒体には、メインメモリ1204等のダイナミックメモリが含まれる。一方、伝送媒体には、バス1202を形成する電線を含む、同軸ケーブル、銅線、及び光ファイバが含まれる。また伝送媒体は、電波及び赤外線データ通信の間に生成されるような音波や光波の形態をとってもよい。
【0068】
実行用のプロセッサ1203に対する1つ以上の命令の1つ以上のシーケンスを実行する際に、様々な形態のコンピュータ可読媒体を用いてもよい。例えば、命令は、最初に、リモートコンピュータの磁気ディスクに保持されてもよい。リモートコンピュータは、本開示の全て又は一部を実施するための命令をダイナミックメモリにリモートでロードし、モデムを用いて電話線で命令を送信することができる。コンピュータシステム1201に対してローカルなモデムが、電話線でデータを受信し、そのデータをバス1202に乗せてもよい。バス1202はデータをメインメモリ1204に伝え、プロセッサ1203はそこから命令を取り出し実行する。メインメモリ1204が受け取った命令は、必要に応じて、プロセッサ1203による実行前又は実行後にハードディスク1207又は1208に記憶されてもよい。
【0069】
またコンピュータシステム1201は、バス1202に結合された通信インタフェース1213を含む。通信インタフェース1213は、例えば、ローカルエリアネットワーク(LAN:Local Area Network)1215や、インターネット等の別の通信ネットワーク1216に接続されたネットワークリンク1214に結合する双方向データ通信を提供する。例えば、通信インタフェース1213は、任意のパケット交換LANに接続するためのネットワークインタフェースカードであってもよい。別の例として、通信インタフェース1213は総合サービスデジタル網(ISDN:Integrated Services Digital Network)カードであってもよい。無線リンクが実装されてもよい。任意のそのような実施態様において、通信インタフェース1213は、様々なタイプの情報を表わすデジタルデータストリームを伝える電気信号、電磁気信号、又は光学信号を送受信する。
【0070】
ネットワークリンク1214は、一般に、1つ以上のネットワークを介してデータ通信を他のデータ装置に提供する。例えば、ネットワークリンク1214は、ローカルネットワーク1215(例えば、LAN)、又は通信ネットワーク1216を介して通信サービスを提供するサービスプロバイダによって操作された機器を通じて、別のコンピュータに接続を提供してもよい。ローカルネットワーク1214及び通信ネットワーク1216は、例えば、デジタルデータストリームを伝える電気信号、電磁気信号、又は光学信号と、関連する物理層(例えば、CAT5ケーブル、同軸ケーブル、光ファイバ等)とを使用する。種々のネットワークを介した信号と、ネットワークリンク1214上にありコンピュータシステム1201との間でデジタルデータをやりとりする通信インタフェース1213を介した信号は、ベースバンド信号、又は搬送波ベース信号で実施されてもよい。ベースバンド信号は、デジタルデータビットの流れを表す非変調電気パルスとしてデジタルデータを伝え、ここで、用語「ビット」は記号を意味するように広義に解釈されるべきであり、各記号は少なくとも1つ以上の情報ビットを伝える。またデジタルデータは、導電性媒体によって伝播されるかあるいは伝播媒体を介して電磁波として送信される、振幅偏移符号化信号、位相偏移符号化信号、及び/又は周波数偏移符号化信号等で搬送波を変調するために使用されてもよい。したがって、デジタルデータは、「配線」通信チャネルによって非変調ベースバンドデータとして送信されてもよく、及び/又は、搬送波を変調することによって、ベースバンドと異なる所定の周波数帯の範囲内で送信されてもよい。コンピュータシステム1201は、ネットワーク1215及び1216、ネットワークリンク1214、及び通信インタフェース1213を通して、プログラムコードを含むデータを送受信することができる。さらに、ネットワークリンク1214は、LAN1215を介して、携帯情報端末(PDA:Personal Digital Assistant)、ラップトップコンピュータ、携帯電話等の携帯機器1217に接続を提供してもよい。
【0071】
なお、上記実施形態では、決定部が、2つの結晶それぞれの左端点の中間に位置する第1の中間点と、2つの結晶それぞれの右端点の中間に位置する第2の中間点とを規定し、第1の中間点及び第2の中間点を通る中間線を決定する場合の例を説明した。しかし、実施形態はこれに限られず、TORに関する任意の基準線を用いてもよい。例えば、決定部は、2つの結晶の検出面のいずれか一方に沿った直線を基準線として規定してもよいし、ボクセルからみて2つの結晶のいずれかより外側に規定された任意の直線を基準線として規定してもよい。そして、この場合には、決定部が、PETシステムのX−Y平面内で、2つの結晶それぞれの左端点を結ぶ第1の稜線と、2つの結晶それぞれの右端点を結ぶ第2の稜線とを決定したうえで、計算部が、第1の稜線を含む直線と基準点との交点及び第2の稜線と基準点との交点のいずれか一方の交点と第1の投影点との間の第1の距離と、当該一方の交点と第2の投影点との間の第2の距離とを計算する。
【0072】
また、上記実施形態では、投影部が、PETシステムのX−Y平面内で、第1の中心点を第1の稜線の方向に沿ってTORの中間線に投影して第1の投影点を規定し、第2の中心点を第2の稜線の方向に沿ってTORの中間線に投影して第2の投影点を規定する場合の例を説明した。しかし、実施形態はこれに限られず、任意の方向に沿って第1の中心点及び第2の中心点を基準線に投影してもよい。例えば、投影部は、TORの中間線などの基準線に対する垂線に沿って第1の中心点及び第2の中心点を基準線に投影することで、第1の投影点及び第2の投影点を規定してもよい。
【0073】
ある特定の実施形態を説明してきたが、これらの実施形態は、単なる事例として提示したものであって、発明の範囲を限定するものではない。実際、本明細書で説明した新規の方法及びシステムは、様々な別の態様で具体化が可能である。さらには、本発明の範囲を逸脱することなく、本明細書で説明した方法及びシステムにおいて様々な省略、置換、及び変更が可能である。添付の特許請求の範囲及びそれらの均等物は、本発明の範囲と精神に収まると考えられる態様又は変更を有効範囲に含むためのものである。
【符号の説明】
【0074】
10 結晶
25 同時計数管(TOR:Tube Of Response)
40 ボクセル
50 中間線
55 中間点
56 中心点
65 投影点
【技術分野】
【0001】
本発明の実施形態は、ポジトロン放射断層撮影システム、再構成装置及び距離比決定方法に関する。
【背景技術】
【0002】
従来、ポジトロン放射断層撮影システムでは、PET画像を再構成するプロセスにおいて、特定のアルゴリズムを用いて、同時計数線(LOR:Line Of Response)又は同時計数管(TOR:Tube Of Response)及びボクセルに対する検出確率が計算される。ここでいう検出確率とは、ボクセルから放出される光子が任意の一対の結晶によって検出される確率である。この検出確率を計算するための要素には、LOR又はTORとボクセルとの間の幾何確率(幾何効率とも呼ばれる)が含まれるが、この幾何確率を計算する際の計算誤差によって、非均一なアーティファクトが生じる場合がある。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Jurgen J.Scheins,et al., "Analytical Calculation of Volumes-of-Intersection for Iterative,Fully 3-D PET Reconstruction",IEEE Transactions on Medical Imaging,Vol.25,No.10,pp.1363-1369,October 2006
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、非均一なアーティファクトを取り除くことができるポジトロン放射断層撮影システム、再構成装置及び距離比決定方法を提供することである。
【課題を解決するための手段】
【0005】
実施形態に係るポジトロン放射断層撮影システムは、ポジトロン放射断層撮影システムの再構成空間内に2つの結晶によって規定される同時計数管とボクセルとの間の幾何確率を計算するために用いられる距離比を決定するものであって、決定部と、投影部と、計算部と、距離比決定部とを備える。決定部は、前記ポジトロン放射断層撮影システムのX−Y平面内で、前記2つの結晶それぞれの左端点を結ぶ第1の稜線と、前記2つの結晶それぞれの右端点を結ぶ第2の稜線と、前記同時計数管に関する基準線とを決定する。投影部は、前記X−Y平面内で、前記ボクセルの第1の面の第1の中心点を前記基準線に投影して第1の投影点を規定し、前記ボクセルの第2の面の第2の中心点を前記基準線に投影して第2の投影点を規定する。計算部は、前記第1の稜線を含む直線と前記基準線との交点及び前記第2の稜線を含む直線と前記基準線との交点のいずれか一方の交点と前記第1の投影点との間の第1の距離と、前記一方の交点と前記第2の投影点との間の第2の距離とを計算する。距離比決定部は、前記第1の距離及び前記第2の距離に基づいて、前記X−Y平面における第1の距離比を決定する。
【図面の簡単な説明】
【0006】
本開示は、以下の説明を読むこと、及び添付図面を検討することにより、よりよく理解されるであろう。なお、これらの図は、実施形態の非制限的な実施例として単に提供するものである。
【0007】
【図1】図1は、ポジトロン放射断層撮影(PET:Positron Emission Tomography)検出器のリングを示す図である。
【図2A】図2Aは、幾何確率を計算する様々な方法を示す図である。
【図2B】図2Bは、幾何確率を計算する様々な方法を示す図である。
【図2C】図2Cは、幾何確率を計算する様々な方法を示す図である。
【図3A】図3Aは、ボクセルの交差面積を計算するための2次元(2D)法を示す図である。
【図3B】図3Bは、ボクセルの交差面積を計算するための2次元(2D)法を示す図である。
【図3C】図3Cは、ボクセルの交差面積を計算するための2次元(2D)法を示す図である。
【図4A】図4Aは、距離比を計算するための平面を選定するための実施形態を示す図である。
【図4B】図4Bは、距離比を計算するための平面を選定するための実施形態を示す図である。
【図5A】図5Aは、投影のためのボクセルの適切な辺を選定するための実施形態を示す図である。
【図5B】図5Bは、投影のためのボクセルの適切な辺を選定するための実施形態を示す図である。
【図5C】図5Cは、投影のためのボクセルの適切な辺を選定するための実施形態を示す図である。
【図6A】図6Aは、距離比及び幾何確率を計算するための実施形態を示す図である。
【図6B】図6Bは、距離比及び幾何確率を計算するための実施形態を示す図である。
【図7A】図7Aは、結晶の辺の選定及びボクセルの中心の投影方向を示す図である。
【図7B】図7Bは、結晶の辺の選定及びボクセルの中心の投影方向を示す図である。
【図8A】図8Aは、本開示の方法のフローチャートを示す図である。
【図8B】図8Bは、本開示の方法のフローチャートを示す図である。
【図9A】図9Aは、平行ビーム単一光子放射コンピュータ断層撮影(SPECT:Single Photon Emission Computed Tomography)イメージング装置への本開示の方法の適用を示す図である。
【図9B】図9Bは、平行ビーム単一光子放射コンピュータ断層撮影(SPECT:Single Photon Emission Computed Tomography)イメージング装置への本開示の方法の適用を示す図である。
【図10】図10は、本開示の実施形態を実装するコンピュータシステムを示す図である。
【発明を実施するための形態】
【0008】
本明細書に記載の実施形態は、医療イメージング装置における3次元再構成において、エリアシミュレーティングボリュームシステムモデルを利用した前方及び後方投影に関する。
【0009】
ポジトロン放射断層撮影(PET:Positron Emission Tomography)の利用は、医用イメージングの分野において増加している。PETイメージングでは、注射、吸入、又は経口摂取によって放射性薬剤が、図1に示す撮像対象の被検体15に注入される。放射性薬剤の投与後、薬剤は、その物理的性質及び分子生物学的性質によって人体(すなわち、被検体15)内の特定の部位に集中する。薬剤の実際の空間分布、薬剤の蓄積度合い、及び投与されてから最終的に排出されるまでのプロセスの動態は、全て、臨床的有意性を有しうる因子である。このプロセスにおいて、放射性薬剤に付着させたポジトロン放射体は、半減期、分岐比等の同位体の物理的性質に応じてポジトロンを放出する。
【0010】
放射性核種はポジトロンを放出し、放出されたポジトロンが電子と衝突すると消滅事象が生ずる。そして、衝突によってポジトロンと電子は消滅する。多くの場合、消滅事象によって略180度方向に放出される2つの511keVのガンマ光子が発生し、これらがPETリング20に設けられた1対の結晶10によって検出される。1対の結晶10の中心間を結ぶ線、すなわち同時計数線(LOR:Line Of Response)を引くことによって、又は、1対の結晶10の対応する頂点を結ぶことで形成される多面体、すなわち同時計数管(TOR:Tube Of Response)を描くことによって、高い確率で元の消滅位置を探し出すことができる。このプロセスは相互作用が起こっている可能性のある線(又は管)を識別するに過ぎないが、これらの線(又は管)を数多く蓄積することによって、そして、断層を再構成するプロセスを用いることによって、元の分布を推定することができる。上記2つのシンチレーション事象の位置の他に、正確なタイミング(数百ピコ秒以内)が利用可能であれば、飛行時間(TOF:Time Of Flight)を計算することによって、それらの事象が生じた確率の高い、上記の線(又は管)に沿ったその位置に関する更なる情報を加えることができる。
【0011】
上記の検出プロセスは、多数の消滅事象について反復される必要がある。そのイメージング処理を実行可能にするために必要な回数(すなわち、事象の対)を決定するには、ひとつひとつのイメージング事例を解析する必要があるが、数億の回数を重ねる必要があるというのが、典型的な長さ100cmのフルオロデオキシグルコース(FDG:fluorodeoxyglucose)の研究での現在の運用である。これだけの回数を重ねるのにかかる時間は、薬剤の注入量及びスキャナの感度と計数能力によって決まる。
【0012】
要するに、PET再構成プロセスによって、(既知の)PETシステムにおいて記録されたデータから被検体内の(未知の)同位元素の量と位置が分かる。PET再構成プロセスにおける基本的な課題のひとつは検出確率を求めることであり、この検出確率とはボクセルから放出される光子が任意の1対の結晶10により検出できる確率を示す。
【0013】
この課題に取り組むために、特定のアルゴリズムがLORi又はTORi及び特定のボクセルjに対する検出確率aijを計算するよう設計されている。反復型のオーダーサブセット期待値最大化(OSEM:Ordered Subset Expectation Maximization)再構成において使用される一般式を式(1)に示す。
【0014】
【数1】
【0015】
式(1)において、aijはボクセルjがTORiに寄与する確率であり、QjはSubtに渡り全ての可能なaijを合計することによる正規化項であり、fjはボクセルjの活量であり、YiはTORi内で検出された光子を示し、Subtはt番目のサブセットであり、Ri及びSiはそれぞれTORiに沿った偶発同時計数及び散乱同時計数である。
【0016】
式1において、aijは一般に異なる物理的効果に応じて、式(2)に示すように多数の成分に分解することができる。
【0017】
aij=cij×感度ij×解像度ij×減衰度i×TOFij ・・・(2)
【0018】
ここで、cijは幾何確率であり、aijの重要な係数であり、また本明細書で開示する実施形態により計算される。
【0019】
cijの解析計算のほとんどで、放射性原子核はボクセル内に均一に分布することが暗黙の前提である。したがって、確率cijはTORとボクセルとが交差する体積に比例する。1つのボクセルの体積が単位体積である場合、cijは式(3)に示すように交差体積で直接表すことができる。
【0020】
【数2】
【0021】
実際には、特に円錐ビームX線コンピュータ断層撮影(CT:Computed Tomography)、円錐、扇状、又は平行ビーム単一光子放射コンピュータ断層撮影(SPECT:Single Photon Emission Computed Tomography)、及びPET等の非平行配列のシステムにおいて、交差体積は必ずしも容易に計算されるわけではない。
【0022】
定量的にPET画像を再構成するためには、できる限り正確なシステム応答マトリクスが必要である。このため、基本要件は幾何確率を正確に計算することである。また、診療現場では再構成の早さも非常に重要である。したがって、この要件を満足するために迅速かつ正確なアルゴリズムが必要である。
【0023】
本開示は、医用イメージング装置の再構成空間内に2つの結晶によって規定されるTORとボクセルとの間の幾何確率を計算するために用いられる距離比を計算するための方法、装置、及びシステムについて説明するものである。この方法は、医用イメージング装置のX−Y平面において2つの結晶のそれぞれの左端点を結ぶ第1の稜線であって、左端点間の中間に位置する第1の中間点を含む第1の稜線を決定するステップと、X−Y平面において2つの結晶のそれぞれの右端点を結ぶ第2の稜線であって、右端点間の中間に位置する第2の中間点を含む第2の稜線を決定するステップと、X−Y平面においてTORの中間線を第1の中間点及び第2の中間点と交差する線として決定するステップと、X−Y平面において、第1の投影点を規定するためにボクセルの第1の面の第1の中心点を第1の稜線の方向に沿って中間線に投影するステップと、X−Y平面において、第2の投影点を規定するためにボクセルの第2の面の第2の中心点を第2の稜線の方向に沿って中間線に投影するステップと、第1及び第2の中間点の一方と第1の投影点との間の第1の距離と、第1及び第2の中間点の前記一方と第2の投影点との間の第2の距離とを計算するステップと、X−Y平面において第1の距離比を第1の距離及び第2の距離に基づき決定するステップとを含む。
【0024】
本開示の方法は、同時計数線を規定する2つの結晶のそれぞれについて中心を決定するステップをさらに含む。また、この方法は、ボクセルの第1の面の第1の中心点及びボクセルの第2の面の第2の中心点を、同時計数線とX−Y平面における正のX軸との間の角度に基づき決定するステップを含む。
【0025】
加えて、この方法は、医用イメージング装置のY−Z平面又はX−Z平面において2つの結晶のそれぞれの前端点を結ぶ第3の稜線であって、第1のz線点を含む第3の稜線を決定するステップと、Y−Z平面又はX−Z平面において2つの結晶のそれぞれの後端点を結ぶ第4の稜線であって、第2のz線点を含む第4の稜線を決定するステップと、Y−Z平面又はX−Z平面においてZ軸に平行なTORのz線を第1のz線点及び第2のz線点と交差する線として決定するステップと、Y−Z平面又はX−Z平面において、第3の投影点を規定するためにボクセルの第3の面の第3の中心点を第3の稜線の方向に沿ってz線に投影するステップと、Y−Z平面又はX−Z平面において、第4の投影点を規定するためにボクセルの第4の面の第4の中心点を第4の稜線の方向に沿ってz線に投影するステップと、第1及び第2のz線点の一方と第3の投影点との間の第3の距離と、第1及び第2のz線点の一方と第4の投影点との間の第4の距離とを計算するステップと、Y−Z平面又はX−Z平面において第2の距離比を第3の距離及び第4の距離に基づき決定するステップとを含む。
【0026】
さらに、本開示の方法は、第1の距離比に第2の距離比を乗ずることにより交差体積を計算するステップも含む。また、この方法は、ボクセルの第1の面及びボクセルの第2の面がボクセルの相対する側にあること、及びボクセルの第3の面及びボクセルの第4の面がボクセルの相対する側にあることについても説明している。
【0027】
上述したように、交差体積30(図2A〜2Cに示す)を容易に計算することはできない。したがって、実現の困難性を克服するために、又は、実用的な時間内で計算を行うために、多くの近似法が用いられている。前述の方法は、図2A〜2Cに示すように3つのカテゴリに分類することができる。1次元(1D)法は、交差線の長さ5を計算する、すなわち(単一光又は多重光の)線−長さモデル又は点−格子モデル等の線形補間である。図2Aは、単一光の線−長さモデルの例である。
【0028】
図2Bは、ボクセル40の正確又は概算の交差面積35を計算する2次元(2D)法の例である。この方法には、三角形差分法、細長片−面積モデル、ガウス補間、回転補間(図3Aに示す)、距離駆動型の方法(図3Bに示す)、及び面積で重み付けされた畳み込み補間が含まれる。CTにおいて用いられる1つの2D法は、いわゆる距離駆動型の方法であり、図3Bに示すように検出器ビン及びボクセル40の辺を所定の面上に投影し、重なり合う面積を計算する。この方法は3D法と比べ優れた画質を提供する。
【0029】
他の2つの方法と比べて、3次元(3D)法は、最も高い画像品質と定量的精度を提供する。図2Cは、ボクセル40の正確な又は概算の交差体積30を計算する3D法の一例を示す。この方法には、全ての交差する点を求めて交差体積を計算する解析アルゴリズム、及び、図3Cに示すようにボクセルを多数のサブボクセルに細分して結晶10内部に投影されたサブボクセルの中心の数を数える細分化アルゴリズムが含まれる。細分化アルゴリズムの誤差を計算するために、式(4)を用いてもよい。
【0030】
誤差≦(2N2−4)/N3 ・・・(4)
【0031】
例えば、Nが32に等しければ、誤差は6.2%以下である。
【0032】
しかしながら、上述の方法は特定の欠点を有する。例えば、1D及び2D法は速いが、特に現在一般的に用いられている3DのPET再構成において定量的精度に劣り、度々アーティファクトを導く。さらに、3D法は幾何確率を計算するのに比較的長い時間を要し、これが商品への適用の妨げとなっている。細分化法は典型的な低速3Dアルゴリズムである。例えば、20リングのPETシステム及び128×128×20個のボクセルのあらゆる可能なLORに対する幾何確率を生成するために、8つの中央処理装置(Central Processing Unit:CPU)を使用する場合でも、323個のサブボクセルを使用して約134時間かかる。さらに、距離駆動型の方法は、CTへの適用で用いられるが、PETへの適用にはまだ及ばず使用されていない。加えて、距離駆動型の方法を直接使用すると、PETにおけるアーティファクトと非対称性問題が生じる。
【0033】
本開示の実施形態は、TOR25とボクセル40が重なり合う面積を計算し、この面積を3DのPET再構成におけるシステム応答マトリクスに概算の交差体積30として適用する。本開示の実施形態のアルゴリズムはエリアシミュレーティングボリューム(area-simulating-volume:ASV)アルゴリズムと呼ばれ、この中で面積がX−Y平面及びY−Z(又はX−Z)平面における2つの距離比の積としてそれぞれ計算される。
【0034】
円筒形のPETシステムにおいて、TOR25が6つの平面(すなわち、2つの検出器平面、及び1対の結晶10の8つの頂点を結ぶことによって形成される4つの平面)で形成される。ほとんどの場合いずれの2つの結晶も互いに平行ではなく、そのため、他の4つの平面は、いくつかの特殊な場合を除き多くの場合で対向する平面と平行ではない。この幾何学的な特殊性により、距離比を計算する際に特定の方法が必要であり、この点で本開示の実施形態はCTで用いられる上述の方法と異なる。
【0035】
[共通平面の選択]
ASVアルゴリズムの1つのステップは、距離比を計算するための適切な共通平面を選択、あるいは選定することである。CTで用いられる距離駆動型の方法(distance-driven method)では、固定されたY−Z平面又はX−Z平面が、ボクセル40の辺及び結晶10の辺をマッピングするために用いる共通平面として選択される。この選定により、PET再構成においていくつかのアーティファクトが発生する。この問題は図4Aに示す例で説明することができる。任意のボクセル40がX−Z平面(すなわち、この2Dの例ではX軸)に近づくにつれ、距離比は減少する。このため、この比は共通平面の位置によって変わる。このため、異なるTORは、TORのX−Z平面に対する相対位置によって異なるアルゴリズム誤差を持つ。この場合、非均一な誤差により前方/後方投影において目に見えるアーティファクトが観察される。例えば、TOR1及びTOR2がそれぞれ5%及び2%の計算誤差を持つと仮定する。このとき、TOR1及びTOR2は、誤差無しで100の光子を受けることができると、それぞれ上記の誤差を加えて105及び102の光子を受けることになる。その結果、これらの誤差により非均一なアーティファクトが生じる。アルゴリズム誤差が均一(例えば、3%)であれば、2つのTORはアーティファクト無しで同じ数の光子を受けることになる。
【0036】
本開示の実施形態では、上述の問題を克服するために、適応性のある共通平面が選定される。この平面は、2つの結晶10の稜線上の2つの中間点55を通過し、X−Y平面に垂直である。例えば、図4Bにおいて、共通平面は中間線50に沿っている(すなわち、中間線50に沿ってページに垂直である)。適応性のある共通平面はTORごとに異なるが、常にTOR25の中心に位置することができる。なお、ASV法は多面体形状を持つTORに適用できる。このため、この方法は、上述の非均一なアーティファクトを取り除くことが可能な均一なアルゴリズム誤差を提供することができる。
【0037】
[ボクセルの辺の選択]
ASVアルゴリズムは近似法であり、アルゴリズム自体によって誤差を生じることがある。したがって、アルゴリズム誤差を最小化して、幾何確率を真の値に近づける必要がある。マッピングプロセスにおいて、ボクセル40の適切な辺を選択又は選定することは、アルゴリズム誤差を最小化する際の重要なステップである。
【0038】
ASVアルゴリズムにおいて、ボクセルの辺は面の中心に基づいて選定される。特に、各ボクセル40は6つの面を有し、そのため面の中心を6つ有する(図5Aにおいて、L、R、U、D、F、Bで示す)。6つの中心のうち4つが、共通平面に投影されて交差面積を形成する。本開示の実施形態では、投影プロセスは2つのステップに分けられる。
【0039】
第1のステップでは、ボクセル40の2つの中心点56が、X−Y平面において共通平面の中間線50(図4B参照)に投影されて、投影点65が形成される。矢印52及び53は、前述のボクセル40からの投影を示すために用いられる。矢印52はTOR25の左側の稜線に平行であり、矢印53はTOR25の右側の稜線に平行である。
【0040】
第2のステップでは、ボクセル40の他の2つの中心点56が、Y−Z平面又はX−Z平面においてZ軸に平行な線に投影される。
【0041】
図6Aに示すように、矢印62及び63は、前述のボクセル40からの投影を示すために用いられる。矢印62はTOR25の左側の稜線70に平行であり、矢印63はTOR25の右側の稜線70に平行である。詳細は以下の[距離比及び幾何確率の計算]の項に示す。
【0042】
第1のステップにおいて、2つの中心点56が、TOR25の向きに応じてL−R又はU−Dから選択又は選定される。(2つの結晶10の中心を結ぶ)中心線45と+X軸との間の角度が、選定すべき中心(L−R又はU−D)を決定する。図5Bは、前述の角度が位置するかもしれない様々な領域を示す。例えば、(2つの結晶10の中心を結ぶ)中心線45と+X軸との間の角度が領域1の中に位置する場合、中心U及びDが選定され、その他では中心L及びRが選定される。次の例で、この選定の理由を明らかにすることができる。図5Cは、UとDが誤って選定された例を示す。このため、図5CではLとRの代わりにUとDが選定されると、中間点55と中心点56との間の距離比が1に等しくなる。しかし、交差体積30は1に等しくはならない。
【0043】
第2のステップでは、中心F及びBが投影対象として常に選択、又は選定される。しかしながら、Y−Z平面又はX−Z平面の選定は、中心線45と+Z軸との間の角度に応じて決まる。角度が領域1の中にあれば、X−Z平面が選定され、その他であればY−Z平面が選定される。
【0044】
[距離比及び幾何確率の計算]
ボクセル40の辺(すなわち、面の中心)が決定された後、ASVアルゴリズムがこれらの中心点56を特定の方向に沿って中間線50又は(後述の)z線60に投影することにより、投影点65が形成される。投影方向を決定するために、4つの中点57が各結晶の平均の相互作用の深さ(depth-of-interaction:DOI)における平面上の長方形の辺(図7Aに示す)から選定される。この平均のDOIにおける平面は、光子と結晶の相互作用の平均深さ(例えば、結晶10の長さの40%)によって決定される。そして、投影方向が以下のように与えられる。すなわち図7Bに示すように、左90及び右100の線がX−Y平面におけるボクセル40のL(又はU)及びR(又はD)の投影方向を決定し、前110及び後120の線がY−Z/X−Z平面におけるボクセル40のF及びBの投影方向を決定する。
【0045】
上述したように、中心L−R又はU−Dが中間線50に投影され、図6Aに示すように、中心F−BがZ軸に平行な線(「z線」60と呼ぶ)に投影される。F−Bを投影するためにz線60を選ぶ理由は、Y−Z平面又はX−Z平面に投影された後にTOR25の2つの結晶10が2つの長方形(又はセグメント)を形成するからである。この場合、2つの結晶10の中心点を結ぶ中心線45は、結晶10の左側又は右側の側面の中間点を結ぶ他の2つの線70に平行であり、図6Aに示すようになる。したがって、距離比はz線60の位置に左右されず、非均一なアーティファクトが発生しない。なお、z線60上の点75は、中間線50上の点55と一致してもよく、中間線50上の点55と異なっていてもよい。
【0046】
なお、ボクセル40がTOR25の稜線の間に位置するとき、距離比は1に等しい。
【0047】
ASVアルゴリズムでは、幾何確率が距離比W1とW2の積に等しく、図4B及び図6Aに示すように、X−Y平面及びY−Z(又はX−Z)平面において計算される。すなわち、以下の式(5)で計算される。
【0048】
【数3】
【0049】
図6Bは、ボクセル40の共通平面への投影、及びTORと共通平面とが交差する形状を示す。こうして、a×cが共通平面におけるボクセル40とTOR25との交差面積85である。1つの実施形態において、この交差部分の高さが、いつもそうとは限らないものの、単位長さであると想定されている。そのため、cijは交差体積30になる。この概念が、本開示のアルゴリズムが「エリアシミュレーティングボリューム」と呼ばれる理由である。
【0050】
要するに、本開示の実施形態は、TORとボクセルとが重なり合う面積を計算し、算出した重なり合う面積を3DのPET再構成におけるシステム応答マトリクスに概算の交差体積として適用する。ASVアルゴリズムは、この面積をそれぞれX−Y及びY−Z(又はX−Z)平面における2つの距離比の積として計算する。X−Y平面における距離比を計算する1つの例には、以下が含まれる。1)TORの2つの稜線の中間点を結ぶ線であるTORの中間線を求める。2)ボクセルの辺の2つの中心点を2つの稜線に沿って中間線に投影する。3)2つの中間点と2つの投影点との間の距離比を求める。
【0051】
図8A及び8Bは、PET等の医用イメージング装置の再構成空間内で、ボクセル40と2つの結晶10によって規定されるTOR25との間の幾何確率を計算するために用いられる距離比を計算するための方法を示す。ステップ100で、医用イメージング装置のX−Y平面において2つの結晶のそれぞれの左の端点を結ぶ第1の稜線であって、左の端点間の中間に位置する第1の中間点を含む第1の稜線が決定される。ステップ110で、X−Y平面において2つの結晶のそれぞれの右の端点を結ぶ第2の稜線であって、右の端点間の中間に位置する第2の中間点を含む第2の稜線が決定される。
【0052】
次に、ステップ120で、第1の中間点及び第2の中間点と交差する線である、X−Y平面におけるTORの中間線が決定される。ステップ130で、ボクセルの第1の面の第1の中心点が、X−Y平面において、第1の稜線の方向に沿って中間線に投影され、第1の投影点が規定される。そして、ステップ140で、ボクセルの第2の面の第2の中心点が、X−Y平面において、第2の稜線の方向に沿って中間線に投影され、第2の投影点が規定される。
【0053】
ステップ150で、第1及び第2の中間点の一方と第1の投影点との間の第1の距離が計算され、第1及び第2の中間点の前記一方と第2の投影点との間の第2の距離も計算される。次に、ステップ160で、第1の距離及び第2の距離に基づくX−Y平面における第1の距離比が決定される。
【0054】
さらに、ステップ170で、医用イメージング装置のY−Z平面又はX−Z平面における2つの結晶のそれぞれの前の端点を結ぶ第3の稜線であって、第1のz線点を含む第3の稜線が決定される。ステップ180で、Y−Z平面又はX−Z平面における2つの結晶のそれぞれの後の端点を結ぶ第4の稜線であって、第2のz線点を含む第4の稜線が決定される。
【0055】
次に、ステップ190で、Y−Z平面又はX−Z平面においてZ軸に平行であり、第1のz線点及び第2のz線点と交差する線であるTORのz線が決定される。ステップ200では、ボクセルの第3の面の第3の中心点が、Y−Z平面又はX−Z平面において、第3の稜線の方向に沿ってz線に投影され、第3の投影点が規定される。そして、ステップ210で、ボクセルの第4の面の第4の中心点が、Y−Z平面又はX−Z平面において、第4の稜線の方向に沿ってz線に投影され、第4の投影点が規定される。
【0056】
ステップ220で、第1及び第2のz線点の一方と第3の投影点との間の第3の距離が計算され、第1及び第2のz線点の一方と第4の投影点との間の第4の距離も計算される。次に、ステップ230で、Y−Z平面又はX−Z平面における第2の距離比が、第3の距離及び第4の距離に基づき決定される。最後に、ステップ240で、交差体積が、第1及び第2の距離比を乗算することにより計算される。
【0057】
本開示の方法は、CTやSPECT等の他の医用イメージング装置に適用してもよい。CTイメージングにおいて、TORの形状が多面体から円錐に等級が下がっても、幾何確率Cijを計算するためにASVアルゴリズムを用いてもよく、これによりむしろアルゴリズムが簡略化されることになる。SPECTイメージングにおいて、TORは、直平行六面体、三角柱からパラレルビームコリメータ、ファンビームコリメータ、又はコーンビームコリメータ用の角錐まで様々な形状にすることができる。多面体TORは全ての上述の形状を含むことができるため、ASVアルゴリズムをほとんど修正せずに使用してもよい。例えば、パラレルビームコリメータを有するSPECTで、2つの距離比がPETのときと同様に計算することができるが、共通平面は今Y=0又はX=0に固定されており、また結晶の辺を結ぶ線が互いに平行であるため、投影方向がボクセルの1対の辺に対して同じである。図9A及び9Bは、パラレルビームコリメータを有するSPECTイメージング装置へのASVアルゴリズムの適用を示す。特に、図9AはX−Y平面における距離比を示し、図9BはY−Z平面における距離比を示す。
【0058】
[画像品質及び計算速度]
エリアシミュレーティングボリュームアルゴリズムは、優れた画像品質を提供し、その品質は3D法(例えば、細分化法)により生成された画像品質に比較的近い。しかし、ASVアルゴリズムにかかる時間は交差体積法よりもかなり短い。例えば、ASVアルゴリズムでは48リングのPETの80の角度に対して全ての幾何確率を生成するために約247秒かかるが、交差体積法では29626秒を要する(4つのCPUを使用して100倍の差がある)。
【0059】
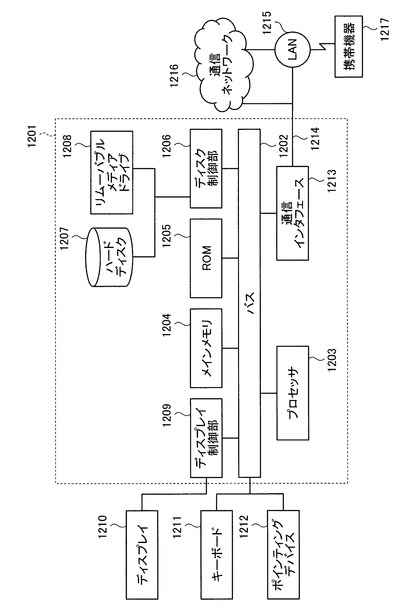
上述のPETシステムの様々な構成要素は、コンピュータシステム又はプログラム可能なロジックを用いて実施することができる。図10は本開示の実施形態を実施してもよいコンピュータシステム1201を示す。コンピュータシステム1201は、再構成装置及び/又はPETシステムの、例えば、様々な処理部(すなわち、決定部、投影部、計算部、距離比決定部、及び交差体積計算部)を含んでもよく、これらが上述のプロセスを実行する。
【0060】
コンピュータシステム1201は、情報及び命令を記憶するための、ハードディスク1207やリムーバブルメディアドライブ1208(例えば、フロッピー(登録商標)ディスクドライブ、読み出し専用コンパクトディスクドライブ、読み出し/書き込みコンパクトディスクドライブ、コンパクトディスクジュークボックス、テープドライブ、及びリムーバブル光磁気ドライブ)等の1つ以上の記憶装置を制御するためにバス1202に結合されたディスク制御部1206を含む。記憶装置は、適切なデバイスインタフェース(例えば、小型コンピュータシステムインタフェース(SCSI:Small Computer System Interface)、統合デバイスエレクトロニクス(IDE:Integrated Device Electronics)、拡張IDE(E−IDE:Enhanced-IDE)、直接メモリアクセス(DMA:Direct Memory Access)、又はUrtra DMA)を使用して、コンピュータシステム1201に追加されてもよい。
【0061】
またコンピュータシステム1201は、専用論理装置(例えば、特定用途向け集積回路(ASIC:Application Specific Integrated Circuit))、又は構成可能論理装置(例えば、単純プログラム可能論理装置(SPLD:Simple Programmable Logic Device)、複雑プログラム可能論理装置(CPLD:Complex Programmable Logic Device)、及びフィールドプログラマブルゲートアレイ(FPGA:Field Programmable Gate Array))を含んでもよい。
【0062】
またコンピュータシステム1201は、コンピュータユーザに情報を表示するためのタッチパネルディスプレイ又は液晶ディスプレイ(LCD:Liquid Crystal Display)等のディスプレイ1210を制御するために、バス1202に結合されたディスプレイ制御部1209を含んでもよい。コンピュータシステムは、コンピュータユーザと対話しプロセッサ1203に情報を提供するためのキーボード1211やポインティングデバイス1212等の入力装置を含む。ポインティングデバイス1212は、例えば、指示情報とコマンド選択とをプロセッサ1203に通信しかつディスプレイ1210上のカーソルの動きを制御するためのマウス、トラックボール、タッチスクリーンセンサに対する指、又はポインティングスティックであってよい。
【0063】
コンピュータシステム1201は、メインメモリ1204等のメモリに含まれる1つ以上の命令の1つ以上のシーケンスを実行するプロセッサ1203に応じて、本開示の処理ステップの一部又は全てを実行する。そのような命令は、ハードディスク1207やリムーバルブメディアドライブ1208等の別のコンピュータ可読媒体からメインメモリ1204に読み込まれてもよい。メインメモリ1204に含まれる命令シーケンスを実行するために、マルチプロセッシング構成の1つ以上のプロセッサを使用してもよい。他の実施形態では、ハードワイヤード回路が、ソフトウェア命令の代わり又はそのソフトウェア命令との組み合わせで使用されてもよい。したがって、実施形態は、ハードウェアの回路構成とソフトウェアとのいずれの特定の組み合わせにも限定されない。
【0064】
上述したように、コンピュータシステム1201は、本開示の教示に従ってプログラムされた命令を保持し、データ構造、テーブル、レコード、又は本明細書に記載の他のデータを収容するための少なくとも1つのコンピュータ可読媒体又はメモリを含む。コンピュータ可読媒体の例は、コンパクトディスク、ハードディスク、フロッピー(登録商標)ディスク、テープ、光磁気ディスク、プログラマブルROM(PROM:Programmable ROM)、(消去可能PROM(EPROM:Erasable PROM)、電気的消去可能PROM(EEPROM:Electrically Erasable PROM)、フラッシュEPROM)、ダイナミックRAM(DRAM:Dynamic RAM)、スタティックRAM(SRAM:Static RAM)、シンクロナスDRAM(SDRAM:Synchronous DRAM)、又は任意の他の磁気媒体、コンパクトディスク(例えば、CD−ROM)、又は任意の他の光学媒体、パンチカード、紙テープ、又は開孔パターンを持つ他の物理媒体である。
【0065】
本開示は、コンピュータシステム1201を制御し、本実施形態を実施するための1又は複数の装置を作動させ、コンピュータシステム1201が人間ユーザと対話できるようにするための、コンピュータ可読媒体のいずれか1つ又は組み合わせに記憶されたソフトウェアを含む。そのようなソフトウェアは、以下に限定されないが、デバイスドライバ、オペレーティングシステム、及びアプリケーションソフトウェアを含んでもよい。そのようなコンピュータ可読媒体は、本実施形態を実施する際に実行される処理の全て又は一部(処理が分散される場合)を実行するための本開示のコンピュータプログラム製品をさらに含む。
【0066】
本実施形態のコンピュータコード装置は、スクリプト、解釈可能プログラム、ダイナミックリンクライブラリ(DLL:Dynamic Link Library)、Java(登録商標)クラス、及び完全実行可能プログラムを含むがこれに限定されない任意の解釈可能又は実行可能なコード機構であってよい。さらに、本実施形態の処理の一部分は、パフォーマンス、信頼性、及び/又はコスト効果を高めるために分散されてもよい。
【0067】
用語「コンピュータ可読媒体」は、本明細書で使用されるとき、実行用のプロセッサ1203に命令を提供することに関する任意の非一時的媒体を指す。コンピュータ可読媒体は、不揮発性媒体や揮発性媒体を含むがこれに限定されない多くの形態をとってもよい。不揮発性媒体には、例えば、ハードディスク1207やリムーバブルメディアドライブ1208等の、光ディスク、磁気ディスク、及び光磁気ディスクが含まれる。揮発性媒体には、メインメモリ1204等のダイナミックメモリが含まれる。一方、伝送媒体には、バス1202を形成する電線を含む、同軸ケーブル、銅線、及び光ファイバが含まれる。また伝送媒体は、電波及び赤外線データ通信の間に生成されるような音波や光波の形態をとってもよい。
【0068】
実行用のプロセッサ1203に対する1つ以上の命令の1つ以上のシーケンスを実行する際に、様々な形態のコンピュータ可読媒体を用いてもよい。例えば、命令は、最初に、リモートコンピュータの磁気ディスクに保持されてもよい。リモートコンピュータは、本開示の全て又は一部を実施するための命令をダイナミックメモリにリモートでロードし、モデムを用いて電話線で命令を送信することができる。コンピュータシステム1201に対してローカルなモデムが、電話線でデータを受信し、そのデータをバス1202に乗せてもよい。バス1202はデータをメインメモリ1204に伝え、プロセッサ1203はそこから命令を取り出し実行する。メインメモリ1204が受け取った命令は、必要に応じて、プロセッサ1203による実行前又は実行後にハードディスク1207又は1208に記憶されてもよい。
【0069】
またコンピュータシステム1201は、バス1202に結合された通信インタフェース1213を含む。通信インタフェース1213は、例えば、ローカルエリアネットワーク(LAN:Local Area Network)1215や、インターネット等の別の通信ネットワーク1216に接続されたネットワークリンク1214に結合する双方向データ通信を提供する。例えば、通信インタフェース1213は、任意のパケット交換LANに接続するためのネットワークインタフェースカードであってもよい。別の例として、通信インタフェース1213は総合サービスデジタル網(ISDN:Integrated Services Digital Network)カードであってもよい。無線リンクが実装されてもよい。任意のそのような実施態様において、通信インタフェース1213は、様々なタイプの情報を表わすデジタルデータストリームを伝える電気信号、電磁気信号、又は光学信号を送受信する。
【0070】
ネットワークリンク1214は、一般に、1つ以上のネットワークを介してデータ通信を他のデータ装置に提供する。例えば、ネットワークリンク1214は、ローカルネットワーク1215(例えば、LAN)、又は通信ネットワーク1216を介して通信サービスを提供するサービスプロバイダによって操作された機器を通じて、別のコンピュータに接続を提供してもよい。ローカルネットワーク1214及び通信ネットワーク1216は、例えば、デジタルデータストリームを伝える電気信号、電磁気信号、又は光学信号と、関連する物理層(例えば、CAT5ケーブル、同軸ケーブル、光ファイバ等)とを使用する。種々のネットワークを介した信号と、ネットワークリンク1214上にありコンピュータシステム1201との間でデジタルデータをやりとりする通信インタフェース1213を介した信号は、ベースバンド信号、又は搬送波ベース信号で実施されてもよい。ベースバンド信号は、デジタルデータビットの流れを表す非変調電気パルスとしてデジタルデータを伝え、ここで、用語「ビット」は記号を意味するように広義に解釈されるべきであり、各記号は少なくとも1つ以上の情報ビットを伝える。またデジタルデータは、導電性媒体によって伝播されるかあるいは伝播媒体を介して電磁波として送信される、振幅偏移符号化信号、位相偏移符号化信号、及び/又は周波数偏移符号化信号等で搬送波を変調するために使用されてもよい。したがって、デジタルデータは、「配線」通信チャネルによって非変調ベースバンドデータとして送信されてもよく、及び/又は、搬送波を変調することによって、ベースバンドと異なる所定の周波数帯の範囲内で送信されてもよい。コンピュータシステム1201は、ネットワーク1215及び1216、ネットワークリンク1214、及び通信インタフェース1213を通して、プログラムコードを含むデータを送受信することができる。さらに、ネットワークリンク1214は、LAN1215を介して、携帯情報端末(PDA:Personal Digital Assistant)、ラップトップコンピュータ、携帯電話等の携帯機器1217に接続を提供してもよい。
【0071】
なお、上記実施形態では、決定部が、2つの結晶それぞれの左端点の中間に位置する第1の中間点と、2つの結晶それぞれの右端点の中間に位置する第2の中間点とを規定し、第1の中間点及び第2の中間点を通る中間線を決定する場合の例を説明した。しかし、実施形態はこれに限られず、TORに関する任意の基準線を用いてもよい。例えば、決定部は、2つの結晶の検出面のいずれか一方に沿った直線を基準線として規定してもよいし、ボクセルからみて2つの結晶のいずれかより外側に規定された任意の直線を基準線として規定してもよい。そして、この場合には、決定部が、PETシステムのX−Y平面内で、2つの結晶それぞれの左端点を結ぶ第1の稜線と、2つの結晶それぞれの右端点を結ぶ第2の稜線とを決定したうえで、計算部が、第1の稜線を含む直線と基準点との交点及び第2の稜線と基準点との交点のいずれか一方の交点と第1の投影点との間の第1の距離と、当該一方の交点と第2の投影点との間の第2の距離とを計算する。
【0072】
また、上記実施形態では、投影部が、PETシステムのX−Y平面内で、第1の中心点を第1の稜線の方向に沿ってTORの中間線に投影して第1の投影点を規定し、第2の中心点を第2の稜線の方向に沿ってTORの中間線に投影して第2の投影点を規定する場合の例を説明した。しかし、実施形態はこれに限られず、任意の方向に沿って第1の中心点及び第2の中心点を基準線に投影してもよい。例えば、投影部は、TORの中間線などの基準線に対する垂線に沿って第1の中心点及び第2の中心点を基準線に投影することで、第1の投影点及び第2の投影点を規定してもよい。
【0073】
ある特定の実施形態を説明してきたが、これらの実施形態は、単なる事例として提示したものであって、発明の範囲を限定するものではない。実際、本明細書で説明した新規の方法及びシステムは、様々な別の態様で具体化が可能である。さらには、本発明の範囲を逸脱することなく、本明細書で説明した方法及びシステムにおいて様々な省略、置換、及び変更が可能である。添付の特許請求の範囲及びそれらの均等物は、本発明の範囲と精神に収まると考えられる態様又は変更を有効範囲に含むためのものである。
【符号の説明】
【0074】
10 結晶
25 同時計数管(TOR:Tube Of Response)
40 ボクセル
50 中間線
55 中間点
56 中心点
65 投影点
【特許請求の範囲】
【請求項1】
ポジトロン放射断層撮影システムの再構成空間内に2つの結晶によって規定される同時計数管とボクセルとの間の幾何確率を計算するために用いられる距離比を決定するポジトロン放射断層撮影システムであって、
前記ポジトロン放射断層撮影システムのX−Y平面内で、前記2つの結晶それぞれの左端点を結ぶ第1の稜線と、前記2つの結晶それぞれの右端点を結ぶ第2の稜線と、前記同時計数管に関する基準線とを決定する決定部と、
前記X−Y平面内で、前記ボクセルの第1の面の第1の中心点を前記基準線に投影して第1の投影点を規定し、前記ボクセルの第2の面の第2の中心点を前記基準線に投影して第2の投影点を規定する投影部と、
前記第1の稜線を含む直線と前記基準線との交点及び前記第2の稜線を含む直線と前記基準線との交点のいずれか一方の交点と前記第1の投影点との間の第1の距離と、前記一方の交点と前記第2の投影点との間の第2の距離とを計算する計算部と、
前記第1の距離及び前記第2の距離に基づいて、前記X−Y平面における第1の距離比を決定する距離比決定部と
を備えたことを特徴とするポジトロン放射断層撮影システム。
【請求項2】
前記決定部は、前記2つの結晶それぞれの左端点の中間に位置する第1の中間点と、前記2つの結晶それぞれの右端点の中間に位置する第2の中間点とを規定し、前記第1の中間点及び前記第2の中間点を通る中間線を前記基準線として決定し、
前記計算部は、前記第1の中間点及び前記第2の中間点のいずれか一方の中間点と前記第1の投影点との間の距離を前記第1の距離として計算し、前記一方の中間点と前記第2の投影点との間の距離を前記第2の距離として計算する
ことを特徴とする請求項1に記載のポジトロン放射断層撮影システム。
【請求項3】
前記投影部は、前記X−Y平面内で、前記第1の中心点を前記第1の稜線の方向に沿って前記基準線に投影して前記第1の投影点を規定し、前記第2の中心点を前記第2の稜線の方向に沿って前記基準線に投影して前記第2の投影点を規定することを特徴とする請求項1又は2に記載のポジトロン放射断層撮影システム。
【請求項4】
前記決定部は、同時計数線を規定する前記2つの結晶それぞれの中心をさらに決定することを特徴とする請求項1、2又は3のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項5】
前記決定部は、前記X−Y平面における前記同時計数線と正のX軸との間の角度に基づいて、前記ボクセルの前記第1の面の前記第1の中心点及び前記ボクセルの前記第2の面の前記第2の中心点をさらに決定することを特徴とする請求項1〜4のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項6】
前記決定部は、前記ポジトロン放射断層撮影システムのY−Z平面内又はX−Z平面内で前記2つの結晶それぞれの前端点を結ぶ第3の稜線と、前記Y−Z平面内又は前記X−Z平面内で前記2つの結晶それぞれの後端点を結ぶ第4の稜線と、前記Y−Z平面内又は前記X−Z平面内においてZ軸に平行であり、前記第3の稜線上にある第1のz線点及び前記第4の稜線上にある第2のz線点を通るz線とをさらに決定し、
前記投影部は、前記Y−Z平面内又は前記X−Z平面内で、前記ボクセルの第3の面の第3の中心点を前記第3の稜線の方向に沿って前記z線に投影して第3の投影点をさらに規定し、前記ボクセルの第4の面の第4の中心点を前記第4の稜線の方向に沿って前記z線に投影して第4の投影点をさらに規定し、
前記計算部は、前記第1のz線点及び前記第2のz線点のいずれか一方のz線点と前記第3の投影点との間の第3の距離と、前記一方のz線点と前記第4の投影点との間の第4の距離とをさらに計算し、
前記距離比決定部は、前記第3の距離及び前記第4の距離に基づいて、前記Y−Z平面内又はX−Z平面内で第2の距離比を決定する
ことを特徴とする請求項1〜5のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項7】
前記第1の距離比に前記第2の距離比を乗ずることにより交差体積を計算する交差体積計算部をさらに備えたことを特徴とする請求項1〜6のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項8】
前記ボクセルの前記第3の面及び前記ボクセルの前記第4の面が前記ボクセルの相対する側にあることを特徴とする請求項1〜7のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項9】
前記ボクセルの前記第1の面及び前記ボクセルの前記第2の面が前記ボクセルの相対する側にあることを特徴とする請求項1〜8のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項10】
医用イメージング装置の再構成空間内に2つの結晶によって定義される同時計数管とボクセルとの間の幾何確率を計算するために用いられる距離比を決定する再構成装置であって、
前記医用イメージング装置のX−Y平面内で、前記2つの結晶それぞれの左端点を結ぶ第1の稜線と、前記2つの結晶それぞれの右端点を結ぶ第2の稜線と、前記同時計数管に関する基準線とを決定する決定部と、
前記X−Y平面内で、前記ボクセルの第1の面の第1の中心点を前記基準線に投影して第1の投影点を規定し、前記ボクセルの第2の面の第2の中心点を前記基準線に投影して第2の投影点を規定する投影部と、
前記第1の稜線を含む直線と前記基準線との交点及び前記第2の稜線を含む直線と前記基準線との交点のいずれか一方の交点と前記第1の投影点との間の第1の距離と、前記一方の交点と前記第2の投影点との間の第2の距離とを計算する計算部と、
前記第1の距離及び前記第2の距離に基づいて、前記X−Y平面における距離比を決定する距離比決定部と
を備えたことを特徴とする再構成装置。
【請求項11】
医用イメージング装置の再構成空間内に2つの結晶によって定義される同時計数管とボクセルとの間の幾何確率を計算するために用いられる距離比を決定する距離比決定方法であって、
前記医用イメージング装置のX−Y平面内で、前記2つの結晶それぞれの左端点を結ぶ第1の稜線と、前記2つの結晶それぞれの右端点を結ぶ第2の稜線と、前記同時計数管に関する基準線とを決定するステップと、
前記X−Y平面内で、前記ボクセルの第1の面の第1の中心点を前記基準線に投影して第1の投影点を規定し、前記ボクセルの第2の面の第2の中心点を前記基準線に投影して第2の投影点を規定するステップと、
前記第1の稜線を含む直線と前記基準線との交点及び前記第2の稜線を含む直線と前記基準線との交点のいずれか一方の交点と前記第1の投影点との間の第1の距離と、前記一方の交点と前記第2の投影点との間の第2の距離とを計算するステップと、
前記第1の距離及び前記第2の距離に基づいて、前記X−Y平面における距離比を決定するステップと
を含んだことを特徴とする距離比決定方法。
【請求項1】
ポジトロン放射断層撮影システムの再構成空間内に2つの結晶によって規定される同時計数管とボクセルとの間の幾何確率を計算するために用いられる距離比を決定するポジトロン放射断層撮影システムであって、
前記ポジトロン放射断層撮影システムのX−Y平面内で、前記2つの結晶それぞれの左端点を結ぶ第1の稜線と、前記2つの結晶それぞれの右端点を結ぶ第2の稜線と、前記同時計数管に関する基準線とを決定する決定部と、
前記X−Y平面内で、前記ボクセルの第1の面の第1の中心点を前記基準線に投影して第1の投影点を規定し、前記ボクセルの第2の面の第2の中心点を前記基準線に投影して第2の投影点を規定する投影部と、
前記第1の稜線を含む直線と前記基準線との交点及び前記第2の稜線を含む直線と前記基準線との交点のいずれか一方の交点と前記第1の投影点との間の第1の距離と、前記一方の交点と前記第2の投影点との間の第2の距離とを計算する計算部と、
前記第1の距離及び前記第2の距離に基づいて、前記X−Y平面における第1の距離比を決定する距離比決定部と
を備えたことを特徴とするポジトロン放射断層撮影システム。
【請求項2】
前記決定部は、前記2つの結晶それぞれの左端点の中間に位置する第1の中間点と、前記2つの結晶それぞれの右端点の中間に位置する第2の中間点とを規定し、前記第1の中間点及び前記第2の中間点を通る中間線を前記基準線として決定し、
前記計算部は、前記第1の中間点及び前記第2の中間点のいずれか一方の中間点と前記第1の投影点との間の距離を前記第1の距離として計算し、前記一方の中間点と前記第2の投影点との間の距離を前記第2の距離として計算する
ことを特徴とする請求項1に記載のポジトロン放射断層撮影システム。
【請求項3】
前記投影部は、前記X−Y平面内で、前記第1の中心点を前記第1の稜線の方向に沿って前記基準線に投影して前記第1の投影点を規定し、前記第2の中心点を前記第2の稜線の方向に沿って前記基準線に投影して前記第2の投影点を規定することを特徴とする請求項1又は2に記載のポジトロン放射断層撮影システム。
【請求項4】
前記決定部は、同時計数線を規定する前記2つの結晶それぞれの中心をさらに決定することを特徴とする請求項1、2又は3のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項5】
前記決定部は、前記X−Y平面における前記同時計数線と正のX軸との間の角度に基づいて、前記ボクセルの前記第1の面の前記第1の中心点及び前記ボクセルの前記第2の面の前記第2の中心点をさらに決定することを特徴とする請求項1〜4のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項6】
前記決定部は、前記ポジトロン放射断層撮影システムのY−Z平面内又はX−Z平面内で前記2つの結晶それぞれの前端点を結ぶ第3の稜線と、前記Y−Z平面内又は前記X−Z平面内で前記2つの結晶それぞれの後端点を結ぶ第4の稜線と、前記Y−Z平面内又は前記X−Z平面内においてZ軸に平行であり、前記第3の稜線上にある第1のz線点及び前記第4の稜線上にある第2のz線点を通るz線とをさらに決定し、
前記投影部は、前記Y−Z平面内又は前記X−Z平面内で、前記ボクセルの第3の面の第3の中心点を前記第3の稜線の方向に沿って前記z線に投影して第3の投影点をさらに規定し、前記ボクセルの第4の面の第4の中心点を前記第4の稜線の方向に沿って前記z線に投影して第4の投影点をさらに規定し、
前記計算部は、前記第1のz線点及び前記第2のz線点のいずれか一方のz線点と前記第3の投影点との間の第3の距離と、前記一方のz線点と前記第4の投影点との間の第4の距離とをさらに計算し、
前記距離比決定部は、前記第3の距離及び前記第4の距離に基づいて、前記Y−Z平面内又はX−Z平面内で第2の距離比を決定する
ことを特徴とする請求項1〜5のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項7】
前記第1の距離比に前記第2の距離比を乗ずることにより交差体積を計算する交差体積計算部をさらに備えたことを特徴とする請求項1〜6のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項8】
前記ボクセルの前記第3の面及び前記ボクセルの前記第4の面が前記ボクセルの相対する側にあることを特徴とする請求項1〜7のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項9】
前記ボクセルの前記第1の面及び前記ボクセルの前記第2の面が前記ボクセルの相対する側にあることを特徴とする請求項1〜8のいずれか一つに記載のポジトロン放射断層撮影システム。
【請求項10】
医用イメージング装置の再構成空間内に2つの結晶によって定義される同時計数管とボクセルとの間の幾何確率を計算するために用いられる距離比を決定する再構成装置であって、
前記医用イメージング装置のX−Y平面内で、前記2つの結晶それぞれの左端点を結ぶ第1の稜線と、前記2つの結晶それぞれの右端点を結ぶ第2の稜線と、前記同時計数管に関する基準線とを決定する決定部と、
前記X−Y平面内で、前記ボクセルの第1の面の第1の中心点を前記基準線に投影して第1の投影点を規定し、前記ボクセルの第2の面の第2の中心点を前記基準線に投影して第2の投影点を規定する投影部と、
前記第1の稜線を含む直線と前記基準線との交点及び前記第2の稜線を含む直線と前記基準線との交点のいずれか一方の交点と前記第1の投影点との間の第1の距離と、前記一方の交点と前記第2の投影点との間の第2の距離とを計算する計算部と、
前記第1の距離及び前記第2の距離に基づいて、前記X−Y平面における距離比を決定する距離比決定部と
を備えたことを特徴とする再構成装置。
【請求項11】
医用イメージング装置の再構成空間内に2つの結晶によって定義される同時計数管とボクセルとの間の幾何確率を計算するために用いられる距離比を決定する距離比決定方法であって、
前記医用イメージング装置のX−Y平面内で、前記2つの結晶それぞれの左端点を結ぶ第1の稜線と、前記2つの結晶それぞれの右端点を結ぶ第2の稜線と、前記同時計数管に関する基準線とを決定するステップと、
前記X−Y平面内で、前記ボクセルの第1の面の第1の中心点を前記基準線に投影して第1の投影点を規定し、前記ボクセルの第2の面の第2の中心点を前記基準線に投影して第2の投影点を規定するステップと、
前記第1の稜線を含む直線と前記基準線との交点及び前記第2の稜線を含む直線と前記基準線との交点のいずれか一方の交点と前記第1の投影点との間の第1の距離と、前記一方の交点と前記第2の投影点との間の第2の距離とを計算するステップと、
前記第1の距離及び前記第2の距離に基づいて、前記X−Y平面における距離比を決定するステップと
を含んだことを特徴とする距離比決定方法。
【図1】

【図2A】
【図2B】
【図2C】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】

【図10】
【図2A】
【図2B】
【図2C】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図10】
【公開番号】特開2013−61335(P2013−61335A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2012−198929(P2012−198929)
【出願日】平成24年9月10日(2012.9.10)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成24年9月10日(2012.9.10)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]