
ポッド推進システムのための軸受
改良された軸受アセンブリは、従来技術のように独立した前方シャフトワッシャ及び後方シャフトワッシャを利用せず、一のシャフトワッシャを利用すること、前方ころを後方ころよりも僅かに延長すること、後方ころに対して前方ころの直径を大きくすること、ころの数を増やすこと、不純物がほとんど混入されないように、特にシャフトワッシャの材料を改善すること、及びころと軌道との接触面積を小さくし、ころと軌道とが自在に運動するように構成されているオスキュレーションを含んでいる。改良によって、シャフトワッシャ、軸受/ころ、及び外輪の間における移動や遊隙を低減させ、シャフトワッシャ、軸受/ころ、及び外輪に発生する障害の危険性を低減し、障害が発生した場合に該障害が悪化し、重大な損傷の原因となる可能性を低減することができる。改善及び変更によって、既存のポッド推進システム内に取付可能なように小型化することができる。

【発明の詳細な説明】
【技術分野】
【0001】
[優先権の主張]
本願は、2008年8月27日に出願した米国仮特許出願第61/092397号明細書に基づく優先権を主張するものである。当該明細書の内容全体が、参照によって、あらゆる目的のために本願に組み込まれている。
【0002】
本発明は、一般に船舶用推進システム(maritime propulsion system)、より具体的には大型船舶用ポッド推進システムのためのスラスト軸受構造に関する。
【背景技術】
【0003】
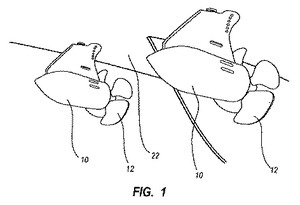
図1は、例えば遊覧客船、海軍艦艇やタンカーのような大型船舶12を推進するために利用される場合があるポッド推進システム、すなわちポッド10を表わす。このようなポッド推進システム10は、アジポッド(azimuthing pod)と呼称される場合があるが、船舶の外殻22の下に懸架可能な、且つ、任意の方向に必要な推力を発生させるために独立して方位角的に360°回転可能な自己充足式とされる。アジマスポッドは、船尾に設けられた貫通式スラスタを必要とせず、機動性を最大限まで引上げる。従って、アジマスポッドを備えている大型船舶でさえ、曳舟の補助を必要とせず、比較的小さな港に入ることができる。アジマスポッドは、省スペースであり、据付容易であり、従来の船尾に設けられたスラスタと比較して効率的である。アジマスポッドは、船舶の主動力装置に対して比較的独立して配置させることができるので、レイアウトに関して高度のフレキシビリティを有している。非常に大型な船舶の場合には、アジマスポッドは、20メガワット(MW)以上の出力を発生させることができる。
【0004】
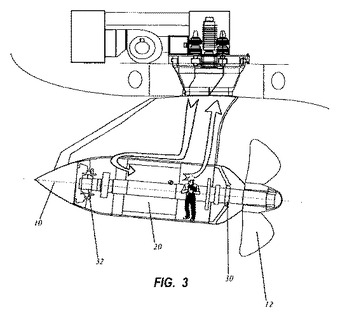
ポッド推進ユニットは、流体力学の観点から最適化されたポッド10内部に収容されている電気モータ20を含んでいるように構成されている。図2及び図3に表わす実施例を参照すると、電気モータ20は、ポッド10内に収容されているプロペラ又は駆動シャフト24を直接駆動するので、密閉されたポッド10の外側に配置されているプロペラ12が駆動される。駆動シャフト24が回転すると、摩擦、及び最終的には熱が、プロペラシャフト24とプロペラシャフト24を支持している1つ以上の軸受との間において生じる。さらに、プロペラシャフト24において発生したトルクが部分的に軸受に伝達される。図2及び図3は、2つの軸受アセンブリ、すなわちプロペラ12に近接したプロペラシャフト24の端部の近傍に配置されている駆動端側のラジアル軸受と、プロペラシャフト24の反対側端部の近傍に配置され且つプロペラ12から離隔配置されている非駆動端側のスラスト軸受32とを表わす。
【0005】
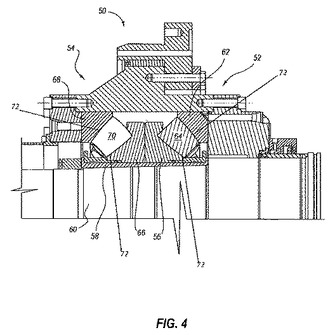
軸受の構成としては、様々な配置及び構造が挙げられる。図4は、図2に表わす軸受アセンブリ32の断面A−Aにおける断面図である。図4は、軸受アセンブリ50を表わし、従来のスラスト軸受の構成を表わす。このような構成は、スラスト球面ころ軸受と呼称される場合がある。スラスト球面ころ軸受は、前方転がり軸受機構52と後方転がり軸受機構54とから成る複列の球面ころを有しているスラスト軸受である。前方転がり軸受機構52は、プロペラシャフト60に隣り合っているテーパ状スリーブ58に接触している前方内輪すなわち前方シャフトワッシャ56と、前方内輪56から離隔配置されている前方外輪62と、前方内輪56と前方外輪62との間に位置決めされている複数の前方ころすなわち前方支持部64と、を含んでいる。同様に、後方転がり軸受機構54は、テーパ状スリーブ58に接触している後方内輪すなわち後方シャフトワッシャ66と、後方内輪66から離隔配置されている後方外輪68と、後方内輪66と後方外輪68との間に位置決めされている複数の後方ころすなわち後方支持部70と、を含んでいる。
【0006】
断面図のみに表わすが、前方内輪56及び後方内輪66と前方外輪62及び後方外輪68とが、ラジアル方向においてプロペラシャフト60を囲んでいる。前方ころすなわち前方支持部64と前方内輪56及び前方外輪62とが相互に作用する地点における表面が、軌道72と呼称される。同様に、後方ころすなわち後方支持部70と後方内輪66及び後方外輪68とが相互に作用する地点における表面も、軌道72と呼称される。動作中において、前方内輪56及び後方内輪66が、プロペラシャフト60に接続され、プロペラシャフト60と共に回転する。しかしながら、前方外輪62及び後方外輪68が、プロペラシャフト60に接続されておらず、一般にはプロペラシャフト60と共に回転することはない。従って、前方ころ64及び後方ころ70が、前方内輪56、後方内輪66、前方外輪62、及び後方外輪68の間において転動又は回転する。典型的には、前方ころ及び後方ころ、すなわち前方支持部及び後方支持部64,70は、前方ころ64及び後方ころ70が前方内輪56、後方内輪66、前方外輪62、及び後方外輪68に対して適切に位置合わせされた状態を維持するために、金属製ケージ内に保持されている。
【0007】
典型的には、ころ、内輪、及び外輪の表面は僅かに湾曲した面を有しており、この面はオスキュレーション(osculation)と呼称される。典型的には、オスキュレーションは、回転方向に対して横方向又はラジアル方向のおける、ころの曲率半径の軌道の曲率半径に対する比として定義される。オスキュレーションは、ころと軌道との隙間嵌めを提供し、これにより輪体及びころが、運転中に位置合わせ状態を維持することができる。より具体的には、他に利点があるにも関わらず、隙間嵌めによって、内部摩擦、屈曲、及び熱に起因して過度に接触することなく、プロペラシャフトが回転中に屈曲し、荷重負荷に起因する弾性膨張及び弾性圧縮によって、摩擦に起因する熱膨張と同様に、プロペラシャフトと内輪及び外輪とが膨張し、プロペラシャフトが、内輪及び外輪に対して芯ずれしてしまう。
【0008】
非特許文献1が、スラスト球面ころ軸受に関する説明に詳しく、参照によって本明細書に完全に組み込まれている。
【0009】
アキシアル方向の力/荷重とラジアル方向の力/荷重との両方が、プロペラシャフト60がプロペラを回転させている際にプロペラシャフト60に作用している。アキシアル荷重の向きとラジアル荷重の向きとが、プロペラシャフト60に結合されているモータの動作が正回転であるか逆回転であるかに従って変化する。方向に関係なく、プロペラシャフト60に結合されている軸受アセンブリが、船舶が運転している際におけるアキシアル荷重及びラジアル荷重に耐えるように構成されており、船舶が運転している際には摩擦を発生させるので、結果的に熱も発生させる。例えば石油のような潤滑剤は、スラスト軸受又はころを通じて循環し続け、スラスト軸受又はころから発生した顕著な摩擦及び熱を負荷として相殺するために利用される冷却システムは、スラスト軸受アセンブリに適用される。実際には、大型船舶のポッドシステムに作用する負荷が、ポッド及び該ポッドの構成部品のメンテナンス及び信頼性に関する問題を大きくする。例えば、特に予想外に大きなアキシアル荷重及びラジアル荷重並びにトルクをプロペラシャフト及び軸受アセンブリに作用させる高速度で回転又は不規則な運動をする際に、予想外に大きな最大負荷が発生すると考えられている。このような問題を克服するためのエンジニアによる解決策及び設計された構成部品に対する上述の努力にも関わらず、信頼性に関する問題及びメンテナンスに関する問題のうち幾つかの問題としては、プロペラシャフト、ころ、内輪及び外輪、並びに軸受システムの他の構成部品の性能劣化、ピッチング、スパリング、クラック、及び完全な破損が挙げられる。最終的な表面の損傷が、初期破損の原因となる典型的には軸受に作用するそれほど顕著ではない負荷が作用する際におけるさらなる損傷についての焦点になる。
【0010】
軸受の損傷の原因とは無関係に、最終的には予想外に、船舶は、ポッドを修理するために、例えば交換し、初期磨耗及び損傷した軸受アセンブリを修理するために数日又は数週間の間使用することができなくなる。
【0011】
従来技術に基づくスラスト軸受アセンブリに関する上述の問題を解決するために、高トルク式ポッド推進システムで利用するのに適した改善されたスラスト軸受アセンブリを提供しようとする様々な試みがなされてきた。これら問題を解決するために当業者が実行した初期の回答は、製造手法を改善すること、及び軸受/ころを製造するために様々な表面コーティング及び表面処理を軌道(runway)に適用するか、又は軸受/ころが受ける応力(力又は荷重/面積)を低減させるために単に軸受/ころの大きさ及び数量を増やすことに集中した。しかしながら、これら努力によっては、問題は解決されなかった。
【0012】
従って、改善された軸受アセンブリが既存のポッド推進システムに容易に改装可能なように従来技術に基づく軸受アセンブリと略同一の大きさを維持しているにも関わらず、荷重及び応力によって発生する損傷に対する耐久性及び耐性を向上させることができ、スパリング、クラック、及び他の障害を低減させることができる軸受アセンブリに対するニーズが存在する。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】米国特許第6935907号明細書
【非特許文献】
【0014】
【非特許文献1】2007年12月にSKFグループから発行された“SKF Spherical Roller Thrust Bearings for Long Lasting Performance”
【発明の概要】
【発明が解決しようとする課題】
【0015】
本明細書で説明される発明の様々な特徴及び実施形態が、実際に進行中の試験の対象であり、従来技術を越える顕著な改善を表わしている。他の改善点があるにも関わらず、本発明の実施形態は、現在のポッド推進システムの既存の空間及び既存の構造内に組み込み可能な程度に依然として小型な、堅牢性及び耐久性を有しているスラスト軸受アセンブリを提供する。当該実施例が、集合的に及び/又は個別に本発明が属する技術分野において予期せぬ発展を表わし、ポッド推進システムを、ポッド推進システムに作用する摩擦及びトルクが現行のポッド推進システムにおいて軸受アセンブリに作用している摩擦及びトルクよりも著しく大きくなる、より大型な船舶のためのより高出力な設計に拡張させることに成功するであろうと信じられている。
【課題を解決するための手段】
【0016】
本明細書に開示されるスラスト軸受アセンブリの実施例は、ポッド推進システムと共に利用される場合に幾つかの重要な機能を実行する。例えば、実施例における軸受アセンブリは、摩擦を低減し、プロペラシャフトからのアキシアル荷重及びラジアル荷重の伝達を改善することを示している一方、プロペラシャフトは、従来技術よりも高い回転速度で、例えば毎分150+回転(rpm)で順方向に回転し、例えば毎分90+回転(rpm)で逆方向に回転する。さらに、実施例における軸受アセンブリでは、プロペラシャフトが、アキシアル方向及びラジアル方向において、従来技術よりも良好に配置されている。
【0017】
以下に詳述するように、本発明の実施例は、従来技術のように独立した前方シャフトワッシャ及び後方シャフトワッシャを利用するのではなく、一のシャフトワッシャを利用すること、後方ころと比較して前方ころを僅かに延長すること、後方ころに対して相対的に前方ころの直径を大きくすること、ころの数を増やすこと、不純物がほとんど混入されていないように、特にシャフトワッシャの材料を改善すること、及びころと軌道との接触面積を小さくし、ころと軌道とが自在に運動するように構成されているオスキュレーションを含んでいる。軸受/ころ、シャフトワッシャ、及び外輪の間における接触面積を大きくする改善及び変更をすることによって、アキシアル荷重及びラジアル荷重によって発生する応力が低減される一方、既存のポッド推進システム内に取付可能な、さらに小型化された構成にすることができる。さらに、改善を集合させることによって、シャフトワッシャ、軸受/ころ、及び外輪の間における移動や遊隙を低減させることができる。結論として、本発明の実施例は、シャフトワッシャ、軸受/ころ、及び外輪に発生する障害の危険性を低減し、障害が発生した場合に該障害が悪化し、重大な損傷の原因となる可能性を低減することができる。
【0018】
また、漏出を検出するために上述のシステムを利用する方法が、本明細書に開示されている。
【0019】
本明細書では、“少なくとも1つ(at least one)”、“1つ以上(one or more)”、及び“及び/又は(and/or)”との記載は、変更可能な表現(open-ended expression)として利用されている。例えば、“A,B、及びCのうち少なくとも1つ(at least one of A, B and C)”、“A,B、又はCのうち少なくとも1つ(at least one of A, B, or C)”、“A,B、又はCのうち1つ以上(one or more of A, B, and C)”、及び“A,B、及び/又はC(A, B, and/or C)”との記載それぞれが、A単独、B単独、C単独、A及びBの両方、A及びCの両方、B及びCの両方、又はA,B、及びCの全体を意味する。
【0020】
本発明の様々な実施例が、本明細書及び特許請求の範囲にて具体化されているのと同様に、添付図面及び発明の詳細な説明に記載されている。しかしながら、本要約書には、1つ以上の本発明のうち実施態様及び実施例のすべてが含まれている訳ではなく、如何なる方法によっても制限されることも限定されることも意図していないことは言うまでもない。さらに、本明細書に開示される本発明が本発明に対する明白な改善及び改良を含んでいることは、当業者によって理解可能であることも言うまでもない。
【0021】
本発明のさらなる利点は、特に添付図面と共に精査した場合に、以下の説明から容易に明らかとなる。
【0022】
1つ以上の本発明における上述の利点及び特徴、並びに他の利点及び特徴をさらに明確にするために、本発明の特定の実施例の参照が添付図面に表わされている。図面は、例示的な実施例を示しているにすぎないので、限定的に考えてはいけない。1つ以上の実施例が、添付図面を参照することによって、さらに明示的且つ詳細に記載及び説明されている。但し、図面の縮尺は必ずしも正確ではない。
【図面の簡単な説明】
【0023】
【図1】従来技術に基づくポッド推進システムを表わす。
【図2】従来技術に基づくポッド推進システムの断面図である。
【図3】従来技術に基づくポッド推進システムの他の断面図である。
【図4】図2に表わす従来技術に基づくスラスト軸受構造の断面A−Aである。
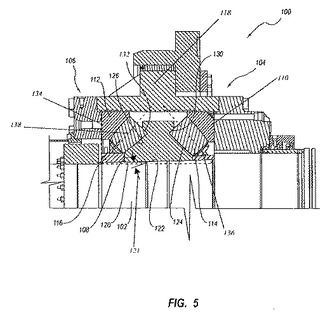
【図5】ポッド推進システムで利用するためのスラスト軸受アセンブリの一の実施形態である。
【図6】ポッド推進システムで利用するためのスラスト軸受アセンブリの他の実施形態である。
【図7】ポッド推進システムで利用するためのスラスト軸受アセンブリの他の実施形態である。
【発明を実施するための形態】
【0024】
図5は、本願発明の第1の実施例である、大型船舶用ポッド推進システムに利用するための小型且つ高性能なスラスト球面ころ軸受アセンブリ100を表わす。大型船舶は、例えば大型クルーズ船であって、運転出力として10MWよりも大きな出力、好ましくは20MWよりも大きな出力、さらに好ましくは30MWよりも大きな出力、を発生可能である。ポッド推進システムに関するさらなる詳細については、特許文献1に開示されている。当該特許文献の全体が、参照によって本明細書に組み込まれている。
【0025】
図5に表わすように、スラスト球面ころ軸受アセンブリ100又は単なる軸受アセンブリ100が、プロペラシャフト102の周囲を囲んで径方向に配置されている。スラスト球面ころ軸受アセンブリ100は、前方ころ軸受機構104及び後方ころ軸受機構106を含む複列球面ころ軸受を有している。
【0026】
前方ころ軸受機構52が前方内輪すなわち前方シャフトワッシャ56を利用し、且つ、後方ころ軸受機構54が別の後方内輪すなわち後方シャフトワッシャ56を利用する、図4に表わす構成とは異なり、図5に表わす前方ころ軸受機構104及び後方ころ軸受機構106は、それぞれ単一の内輪すなわち内側シャフトワッシャ108と相互作用する。結論として、前方ころ軸受機構104と後方ころ軸受機構106とは、前方内輪及び後方内輪すなわち前方シャフトワッシャ及び後方シャフトワッシャを利用する図4に表わす構成ほど互いから独立していない。結論として、前方支持部及び後方支持部すなわち前方ころ114及び後方ころ116が不慮に移動しにくくなり、プロペラシャフト102から作用するラジアル方向力/荷重とアキシアル方向力/荷重とが、前方ころ114及び後方ころ116に沿ってさらに均等に分散される。
【0027】
高出力の用途において発生する歪み、荷重、及び疲労に対処するために必要な品質を有している大きな内輪すなわちシャフトワッシャ108を鍛造及び/又は製造することが極めて困難であったために、本発明よりも前の時代には、このような一体化されたシャフトワッシャが大規模利用のために必要であるか又は望ましいとは考えられていなかったが、単一のシャフトワッシャ108を利用することによって著しく改善される。単一のシャフトワッシャ108の実施例は、一般に、例えば鋼のような高品位材料から製造及び/又は鍛造されるが、他の種類の金属であっても、先行技術で利用される金属よりも著しく硬質であり且つ著しく純度が高ければ、本願発明の技術的範囲に属するものである。任意に、同一のプロセスが、前方外輪110及び後方外輪112と同様に、前方支持部/前方ころ114及び/又は後方支持部/後方ころ116を製造及び/又は鍛造するために利用可能とされる。これら要件に適合する内側シャフトワッシャ108と、前方支持部/前方ころ114及び/又は後方支持部/後方ころ116と、前方外輪110及び/又は後方外輪112とから成る軸受アセンブリが、SKFグループから販売されている。
【0028】
動作中、内側シャフトワッシャ108が、プロペラシャフト102と共通する回転軸線に沿って回転する。しかしながら、内側シャフトワッシャ108は、図4に表わす実施例とは異なり、従来の軸受アセンブリ100に図示されるようにテーパ状のスリーブ58を介在させることなく、プロペラシャフト102上に直接配置されている。内側シャフトワッシャ108の第1の表面120は、シャフトの表面122に隣り合っている斜面121を有しているように構成されている。斜面121の傾斜は、一般に約0°〜約10°の範囲にあり、より好ましくは約2.5°〜約7.5°の範囲にあり、さらにより好ましくは約4°〜約6°の範囲にあり、最も好ましくは約5度である。斜面121を含んでいるように内側シャフトワッシャ108を構成することによって、従来の軸受アセンブリと比較して、より小型且つ効率的な構成にすることができる。また、内側シャフトワッシャ108は、前方支持部/前方ころ114と後方支持部/後方ころ116とがそれぞれシャフトワッシャ108と相互作用する、前方軌道124及び後方軌道126を含んでいる。
【0029】
内側シャフトワッシャ108は、プロペラシャフト102が前進するための方向に回転する場合に発生するアキシアル方向力を前方支持部/前方ころ114の長手軸線136に沿って前方支持部/前方ころ114に作用させるための表面を備えているように構成されている、前方スペーサ130を備えている。内側シャフトワッシャ108は、プロペラシャフト102が後退するための方向に回転する場合に発生するアキシアル方向力を後方支持部/後方ころ116の長手軸線138に沿って後方支持部/後方ころ116に作用させるための表面を備えているように構成されている、後方スペーサ132を備えている。
【0030】
前方転がり軸受機構104及び後方転がり軸受機構106それぞれが、前方外輪110及び後方外輪112それぞれを含んでいる。一連の前方球面支持部/前方ころ114は、内側シャフトワッシャ108と前方外輪110との間に位置決めされている。同様に、一連の後方球面支持部/後方ころ116は、内側シャフトワッシャ108と後方外輪112との間に位置決めされている。典型的には黄銅、鋼、合金、又は他の金属から作られている金属製ケージが、好ましくは前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116を内側シャフトワッシャ108並びに前方外輪110及び後方外輪112それぞれに対して概略的に位置合わせし、これらの位置合わせを維持するために利用される。
【0031】
上述のように、前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116の長手軸線136,138に沿った長さは、一般に従来技術の対応する長さよりも長い。前方球面支持部/前方ころ114の長手軸線136に沿った長さは、後方球面支持部/後方ころ116の長手軸線138に沿った長さよりも長い場合がある。さらに、前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116の直径は、一般に従来技術の対応する直径よりも大きい。長さと同様に、前方球面支持部/前方ころ114の直径は、後方球面支持部/後方ころ116の直径よりも大きい場合がある。言い換えれば、前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116は、非対称である、すなわち互いに異なる長さ及び直径を有している場合がある。
【0032】
上述のようにプロペラシャフト102の回転速度が高められた結果として、船舶が前進する際に前方球面支持部/前方ころ114に作用するラジアル方向力/荷重及びアキシアル方向力/荷重が、船舶が後退又は逆進する際に後方球面支持部/後方ころ116に作用するラジアル方向力/荷重及びアキシアル方向力/荷重よりも著しく大きくなるので、前方球面支持部/前方ころ114と後方球面支持部/後方ころ116とが、このように非対称になっている。従って、後方球面支持部/後方ころ116の直径及び長さを小さくすることによって、前方球面支持部/前方ころ114の直径及び長さを大きくすることができる一方、従来技術に基づく支持機構の全体的な大きさ又は設置面積を維持することもできるので、本願に開示される実施例に基づくポッド推進システムが利用可能となる。これについては、以下に説明する通りである。
【0033】
上述の改善の結果として、前方球面支持部/前方ころ114の接触面積と後方球面支持部/後方ころ116の接触面積とが、前方軌道124及び後方軌道126それぞれに沿って大きくなるので、前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116、内側シャフトワッシャ108、並びに前方外輪110及び後方外輪112に作用する応力が、運転中の所定の荷重においてより小さくなる。例えば、幾つかの従来技術における軸受アセンブリでは、約1200MPaの接触圧力が発生することが知られているが、図5に表わす実施例では、約1059MPaというより低い接触圧力が発生するにすぎないので、早期に故障する可能性が低減される。驚いたことには、このような結果が上述のように達成される一方、従来技術に基づく支持機構の全体的な大きさ又は設置面積を維持することができるので、本願に開示される実施例に基づくポッド推進システムを利用することができる。これについては、以下に説明する。上述のように、前方球面支持部/前方ころ114の表面と後方球面支持部/後方ころ116の表面とが、前方外輪124及び後方外輪126それぞれの対応又は一致する曲面又はオスキュレーションと共に湾曲するように、又は該曲面又は該接触面と接触するように構成されている。曲面同士は、締り嵌めとなるように構成されていない。むしろ、前方曲面支持部/ころ114及び後方曲面支持部/ころ116、内側シャフトワッシャ108、並びに前方外輪110及び後方外輪112が荷重が作用した状態において僅かに可撓性を有しているように、且つ、運転中の摩擦から発生する熱に起因して熱膨張することによって、上述の構成部材が運転中に相互作用するように、曲面又はオスキュレーション同士には僅かな差違が存在しているので、早期故障を招く過度な応力、摩擦、及び熱を発生させる締り嵌めにはなっていない。本発明の実施例は、より小さな寸法公差を、すなわち、より堅固なオスキュレーションを有しているので、接触圧力をより良好に最適化することができる。
【0034】
上述のように、前方ころ軸受機構104及び後方ころ軸受機構106は、エンベロープ134と呼称される所定の空間内に装着されるように構成されている。エンベロープ134は、自身の周囲内において、軸受ハウジング118及びプロペラシャフト102の様々な部分によって概略的に規定されている。好ましい実施例では、軸受アセンブリ100は、上述の改善点を有しているにも関わらず、軸受ハウジング118、前方ころ軸受機構104、及び後方ころ軸受機構106の大きさが従来技術に基づくエンベロープの大きさと略同一となるように構成されている。これにより、軸受ハウジング118、前方ころ軸受機構104、及び後方ころ軸受機構106が、現在稼働中のポッド推進システム内に配設された現行の軸受アセンブリに利用されているエンベロープ内で利用可能となる。このような恩恵によって、ポッド推進システムについてコストを要するリエンジニアリングを実施する必要なく、従来技術に基づく軸受アセンブリを容易に交換可能となる。
【0035】
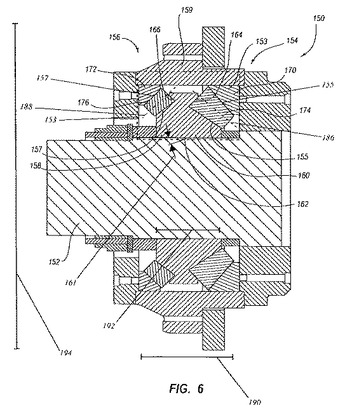
図6は、30MW以上で動作する高出力ポッドを利用した場合に従来技術よりも優位であると思われる軸受アセンブリ150の他の実施例を表わす。当該実施例では、エンベロープ153の内部構成部品が、従来技術に基づく類似するエンベロープのための前方支持部/前方ころに対して前方支持部/前方ころ174を大きくするために、さらに改良されている。より具体的には、軸受アセンブリ150は、上述のように、前方支持部/前方ころ174の長さ及び幅を大きくすることによって、プロペラシャフト152が前方支持部/前方ころ174に伝達させるアキシアル方向荷重及びラジアル方向荷重に起因する応力を低減するように構成されている。そして、上述のように、前方支持部/前方ころ174の寸法をこのように変更することによって、故障する可能性が低減される。
【0036】
図6に表わすように、軸受アセンブリ150は、プロペラシャフト152を中心として径方向に配設されている。スラスト軸受アセンブリ150は、前方ころ軸受機構154及び後方ころ軸受機構156を含んでいる非対称な複式球面ころ軸受として構成されている。図5に表わす構成と同様に、前方ころ軸受機構154と後方ころ軸受機構156とがそれぞれ、単一の内輪、すなわち内側シャフトワッシャ158と相互作用している。その結果として、前方ころ軸受機構154と後方ころ軸受機構156とは、前方内輪及び後方内輪すなわち前方シャフトワッシャ及び後方シャフトワッシャを利用する図4に表わす構成ほど、互いにほとんど独立していない。その結果として、前方支持部すなわち前方ころ174と後方支持部すなわち後方ころ176とが、不意に移動することなく、プロペラシャフト152からのラジアル方向力/荷重とアキシアル方向力/荷重とが、前方ころ174及び後方ころ176に沿って、より均一に分散される。
【0037】
動作中、内側シャフトワッシャ158がプロペラシャフト152と共通する回転軸線を中心として回転する。しかしながら、内側シャフトワッシャ158は、図4に表わす実施例とは異なり、図4の従来型の軸受アセンブリ100に示すテーパ状スリーブ58を介在させることなく、プロペラシャフト152に直接配設されている。内側シャフトワッシャ158の第1の表面160は、シャフト表面162に隣り合っているスロープ161を有しているように構成されている。スロープ161は、一般に約0°〜約10°であり、より好ましくは約2.5°〜約7.5°であり、さらにより好ましくは約4°〜約6°であり、最も好ましくは約5°である。内側シャフトワッシャ158をスロープ161を含むように構成することによって、従来型の軸受アセンブリと比較して、より小型且つ効率的な構成とすることができる。また、内側シャフトワッシャ158は、前方軌道155及び後方軌道157を含んでいる。前方軌道155及び後方軌道157では、前方支持部/前方ころ174及び後方支持部/後方ころ176がそれぞれシャフトワッシャ158と相互作用する。
【0038】
内側シャフトワッシャ158は、前方スペーサ164を備えている。前方スペーサ164は、プロペラシャフト152が船舶を前進させる方向に回転した場合に発生する前方支持部/前方ころ174の長手方向軸線186に沿ったアキシアル方向力を前方支持部/前方ころ174によって作用させる、表面を有しているように構成されている。また、内側シャフトワッシャ158は、後方スペーサ166を備えている。後方スペーサ166は、プロペラシャフト152が船舶を後進させる方向に回転した場合に発生する後方支持部/後方ころ176の長手方向軸線188に沿ったアキシアル方向力を後方支持部/後方ころ176によって作用させる、表面を有しているように構成されている。
【0039】
前方ころ軸受機構154及び後方ころ軸受機構156がそれぞれ、前方外輪170及び後方外輪172それぞれを含んでいる。一連の前方球面支持部/前方ころ174が、内側シャフトワッシャ158と前方外輪170との間に配設されている。同様に、一連の後方球面支持部/後方ころ176が、内側シャフトワッシャ158と後方外輪172との間に配設されている。金属製ケージ、一般には黄銅、鋼、合金、又は他の金属から作られたケージが、好ましくは、内側シャフトワッシャ158、並びに前方外輪170及び後方外輪172それぞれに対して、前方支持部/前方ころ174と後方支持部/後方ころ176とを位置合わせし、その位置合わせを維持するために利用される。
【0040】
上述のように、前方支持部/前方ころ174及び後方支持部/後方ころ176は、一般に従来技術に基づく前方支持部/前方ころ及び後方支持部/後方ころと比較して、長手軸線186,188に沿って長くなっている。そして、当該実施例では、長手軸線186に沿った前方支持部/前方ころ174の長さは、長手軸線188に沿った後方支持部/後方ころ176の長さよりも長くなっている。さらに、前方支持部/前方ころ174及び後方支持部/後方ころ176の直径は、一般に従来技術に基づく前方支持部/前方ころ及び後方支持部/後方ころの直径よりも大きくなっている。言い換えれば、前方支持部/前方ころ174及び後方支持部/後方ころ176は、非対称である、すなわち互いに異なる長さ及び直径を有していると言われる場合がある。
【0041】
船舶が前進する際のプロペラシャフト152の回転速度が、船舶が後進又は逆進する際のプロペラシャフト152の回転速度よりも大きいことに起因にして、前方球面支持部/前方ころ174に作用するラジアル方向力及びアキシアル方向力/荷重が、後方球面支持部/後方ころ176に作用するラジアル方向力及びアキシアル方向力/荷重よりも著しく大きいので、前方球面支持部/前方ころ174と後方球面支持部/後方ころ176とが、このように非対称になっている。従って、上述のように、後方球面支持部/後方ころ176の直径及び長さを小さくすることによって、前方球面支持部/前方ころ174の直径及び長さを大きくすることができる一方、上述のように、エンベロープ153の全体的な大きさを従来技術に基づく支持機構のエンベロープの全体的な大きさと略同一に維持することもできる。
【0042】
上述の改善の結果として、前方球面支持部/前方ころ174及び後方球面支持部/後方ころ176の接触面積が、前方軌道155及び後方軌道157それぞれに沿って大きくなるので、前方球面支持部/前方ころ174及び後方球面支持部/後方ころ176、内側シャフトワッシャ158、並びに前方外輪170及び後方外輪172に作用する応力が、運転中の所定の荷重においては小さくなる。例えば、幾つかの従来技術における軸受アセンブリでは、約1200MPaの接触圧力が発生することが知られているが、図6に表わす実施例では、約953MPaというより低い接触圧力が発生するにすぎないので、早期に故障する可能性が低減される。驚いたことには、上述のようにこのような結果が達成される一方、従来技術に基づく支持機構の全体的な大きさ又は設置面積を維持することができるので、本願に開示される実施例に基づくポッド推進システムを利用することができる。これについては以下に説明する。
【0043】
軸受アセンブリ150の好ましい実施例では、軸受ハウジング159の長さ190は約468mmであり、内側シャフトワッシャ158の長さ192は約337.5mmである。最後に、図6に表わす軸受アセンブリ150の頂部から底部までの高さ194は約1020mmである。この好ましい実施例では、重量は約1765kgであり、シャフトに作用している重量は約1314kgである。現行の軸受取付アセンブリが据付の際に利用可能であることが望ましいので、これら重量は考慮に値する事項である。重量(又は大きさ)が著しく大きくなれば、その場合には、新しい取付システムが必要となるだろう。本願発明では、その構成を小型化することができるので、そのような必要がない。
【0044】
図7は、軸受アセンブリのさらなる他の実施例を表わす。軸受アセンブリ200は、プロペラシャフト204を中心として径方向に配置されている。軸受アセンブリ200の構成は、非対称な複式スラスト球面ころ軸受であり、前方ころ軸受機構214と後方ころ軸受機構242とを備えている。
【0045】
動作中、内側シャフトワッシャ202がプロペラシャフト204と共通する回転軸線を中心として回転する。しかしながら、内側シャフトワッシャ202は、図4に表わす実施例とは異なり、図4の従来型の軸受アセンブリ100のテーパ状スリーブ58を介在させることなく、プロペラシャフト204に直接配置されている。内側シャフトワッシャ202の第1の表面211は、シャフト表面210に隣り合っている斜面250を有しているように構成されている。斜面211は、一般に約0°〜約10°であり、より好ましくは約2.5°〜約7.5°であり、さらにより好ましくは約4°〜約6°であり、最も好ましくは約5°である。内側シャフトワッシャ202を斜面250を含むように構成することによって、従来型の軸受アセンブリと比較して、より小型且つ効率的な構成とすることができる。
【0046】
また、内側シャフトワッシャ202は、前方内輪206を後方内輪208から隔てるように構成されている隔離部分212を含んでいる。従って、軸受アセンブリ200は、図5及び図6に表わす内輪として機能する単一のシャフトワッシャ158を利用するのではなく、エンベロープ252内に独立した前方内輪206と後方内輪208とを含んでいる。
【0047】
また、内側シャフトワッシャ202は、前方支持部/前方ころ230が前方内輪206と相互作用するように、且つ、後方支持部/後方ころ232が後方内輪208と相互作用するように、前方軌道234及び後方軌道236を含んでいる。
【0048】
上述の理由のために、軸受アセンブリ200が、比較的大きな前方支持部/前方ころ230と比較的小さな後方支持部/後方ころ232とを有している。
【0049】
前方ころ軸受機構214及び後方ころ軸受機構242がそれぞれ、前方外輪240及び後方外輪242それぞれを含んでいる。一連の前方球面支持部/前方ころ230が、前方内輪206と前方外輪240との間に配設されている。同様に、一連の後方球面支持部/後方ころ232が、後方内輪208と後方外輪242との間に配設されている。金属製ケージ、一般に黄銅、鋼、合金、又は他の金属から作られたケージが、好ましくは、前方内輪206及び前方内輪208、並びに前方外輪170及び前方外輪172それぞれに対して、前方支持部/前方ころ230と後方支持部/後方ころ232とを位置合わせし、その位置合わせ状態を維持するために利用される。
【0050】
前方内輪206及び後方内輪208、前方支持部/前方ころ230及び後方支持部/後方ころ232、並びに前方外輪240及び後方外輪242それぞれが、アキシアル方向荷重及びラジアル方向荷重が作用した状態において、軌道234,236が最適な関係を維持するように、且つ、前方支持部/前方ころ230及び後方支持部/後方ころ232に沿ったより一様な荷重分布を維持することができるように、これら構成部品を移動及び調整可能に最適化された曲面又はオスキュレーションと空間とを備えているように構成されている。
【0051】
上述の改善の結果として、前方支持部/前方ころ230の接触面積と後方支持部/後方ころ232の接触面積とが、前方軌道234及び後方軌道236それぞれに沿ってより大きくなるので、前方支持部/前方ころ230及び後方支持部/後方ころ232、内側シャフトワッシャ202、並びに前方外輪240及び後方外輪242それぞれに作用する応力が、動作中における所定の荷重においてより小さくなる。例えば、幾つかの従来技術に基づく軸受アセンブリは、約1200MPaの接触面圧力を有していることが知られているが、図7に表わす実施例では、約943MPaというより低い接触面圧力が発生するにすぎないので、故障が早期に発生する可能性が低減される。驚いたことには、上述のようにこのような結果が達成される一方、従来技術に基づく支持機構の全体的な大きさ又は設置面積を維持することができるので、本願に開示される実施例に基づくポッド推進システムを利用することができる。これについては以下に説明する。
【0052】
軸受アセンブリ200の好ましい実施例では、軸受ハウジング244の長さ290は約500mmであり、内側シャフトワッシャ202の長さ292は約250mmである。最後に、図7に表わす軸受アセンブリ200の頂部から底部に至るまでの高さ294は約1150mmである。当該好ましい実施例では、重量が2186kgであり、シャフトに作用する重量が約1792kgである。現行の軸受取付アセンブリが据付の際に有用であることが望ましいので、これら重量は考慮に値する事項である。重量(又は大きさ)が著しく大きくなれば、その場合には、新しい取付システムが必要となるだろう。本願発明では、その構成を小型化することができるので、そのような必要がない。
【0053】
開示された軸受システムの実施例を形成及び/又は製造するための方法は、本発明の技術的範囲に属するものである。当業者であれば、上記開示内容を鑑みて当該方法が本発明に含まれていることを理解することができるが、当該方法が、第1のアキシアル方向力及び第1のラジアル方向力を支持するように構成された複数の前方支持部を準備するステップを少なくとも含んでいることも理解することができるだろう。当該方法は、第2のアキシアル方向力及び第2のラジアル方向力を支持するように構成された複数の後方支持部を準備するステップと、プロペラシャフトに結合されている内側シャフトワッシャであって、プロペラシャフトが順方向に回転した場合に第1のアキシアル方向力及び第1のラジアル方向力を複数の前方支持部に伝達するように、且つ、プロペラシャフトが逆方向に回転した場合に第2のアキシアル方向力及び第2のラジアル方向力を複数の後方支持部に伝達するように構成されている内側シャフトワッシャを準備するステップと、をさらに含んでいる。
【0054】
本発明は、様々な実施例において、例えば性能を向上させるために、簡便性を実現するために、及び/又は装置のコストを低減させるために、従来の装置又はプロセスにおいて利用されていたかもしれない構成部品が設けられていないことを含む、本明細書又は本明細書の様々な実施例に開示及び/又は示唆されていない、該構成部品が設けられていない装置及びプロセスを準備するステップを含んでいる。
【0055】
本発明に関する上述の説明は、図説及び説明をすることを目的として表わされている。上述の説明は、本発明を本明細書に開示される一の形態又は複数の形態に限定することを意図するものではない。例えば、上述の発明の詳細な説明では、本発明の様々な特徴が、開示内容を合理化するために一の実施例又は複数の実施例においてグループ化されている。開示の当該方法は、特許請求の範囲に記載される発明が各請求項に明確に記載される特徴以上の特徴を要求するという意図を反映させるように解釈することはできない。むしろ、以下の請求項が反映しているように、独創的な態様が単一の上述の実施例のすべての特徴を有している訳ではない。従って、以下の請求項が、本明細書によって発明の詳細な説明に組み込まれていると共に、各請求項が、本発明の別々の好ましい実施例として独立している。
【0056】
さらに、本発明の説明は、1つ以上の実施例、その変形例、及び改良例の説明を含んでいるが、他の変形例及び改良例も本発明の技術的範囲に属するものであり、例えば本明細書を理解した後に当業者であれば想到可能な範囲である。このことは、代替的な、相互交換可能な、及び/又は均等な構造、機能、範囲、又は工程が本明細書において開示されていてもいなくても、及び、特許可能な趣旨を公衆に示す意図がなくても、このような代替的な、相互交換可能な、及び/又は均等な構造、機能、該構造及び該機能が必要とする範囲及び工程を含んでいる、ある程度許容可能な代替的な実施例を含んでいることを意図するものである。
【符号の説明】
【0057】
10 ポッド推進システム(ポッド)
12 プロペラシャフト(大型船舶)
20 電気モータ
22 船舶の外殻
24 プロペラシャフト(駆動シャフト)
30 ラジアル軸受
32 スラスト軸受
52 前方ころ軸受機構
54 後方ころ軸受機構
56 前方内輪(前方シャフトワッシャ)
58 スリーブ
100 スラスト球面ころ軸受アセンブリ
102 プロペラシャフト
104 前方ころ軸受機構
106 後方ころ軸受機構
108 内側シャフトワッシャ
110 前方外輪
112 後方外輪
114 前方ころ(前方球面支持部/前方ころ)
116 後方ころ(後方球面支持部/後方ころ)
118 軸受ハウジング
120 第1の表面
121 斜面
122 シャフトの表面
124 前方軌道
126 後方軌道
130 前方スペーサ
132 後方スペーサ
134 エンベロープ
136 前方支持部/前方ころ114の長手軸線
138 後方支持部/後方ころ116の長手軸線
150 軸受アセンブリ
152 プロペラシャフト
153 エンベロープ
154 前方ころ軸受機構
155 前方軌道
156 後方ころ軸受機構
157 後方軌道
158 内側シャフトワッシャ
159 軸受ハウジング
160 第1の表面
161 スロープ
162 内側シャフトワッシャ158の第1の表面
164 前方スペーサ
166 後方スペーサ
170 前方外輪
172 後方外輪
174 前方支持部/前方ころ
176 後方支持部/後方ころ
186 前方支持部/前方ころ174の長手方向軸線
188 後方支持部/後方ころ176の長手方向軸線
190 軸受ハウジング159の長さ
192 内側シャフトワッシャ158の長さ
194 軸受アセンブリ150の頂部から底部までの高さ
200 軸受アセンブリ
202 内側シャフトワッシャ
204 プロペラシャフト
206 前方内輪
208 後方内輪
210 シャフト表面
211 第1の表面
212 隔離部分
214 前方ころ軸受機構
230 前方支持部/前方ころ
232 後方支持部/後方ころ
234 前方軌道
236 後方軌道
240 前方外輪
242 後方ころ軸受機構(後方外輪)
250 斜面
252 エンベロープ
290 軸受ハウジング244の長さ
292 内側シャフトワッシャ202の長さ
294 軸受アセンブリ200の頂部から底部に至るまでの高さ
【技術分野】
【0001】
[優先権の主張]
本願は、2008年8月27日に出願した米国仮特許出願第61/092397号明細書に基づく優先権を主張するものである。当該明細書の内容全体が、参照によって、あらゆる目的のために本願に組み込まれている。
【0002】
本発明は、一般に船舶用推進システム(maritime propulsion system)、より具体的には大型船舶用ポッド推進システムのためのスラスト軸受構造に関する。
【背景技術】
【0003】
図1は、例えば遊覧客船、海軍艦艇やタンカーのような大型船舶12を推進するために利用される場合があるポッド推進システム、すなわちポッド10を表わす。このようなポッド推進システム10は、アジポッド(azimuthing pod)と呼称される場合があるが、船舶の外殻22の下に懸架可能な、且つ、任意の方向に必要な推力を発生させるために独立して方位角的に360°回転可能な自己充足式とされる。アジマスポッドは、船尾に設けられた貫通式スラスタを必要とせず、機動性を最大限まで引上げる。従って、アジマスポッドを備えている大型船舶でさえ、曳舟の補助を必要とせず、比較的小さな港に入ることができる。アジマスポッドは、省スペースであり、据付容易であり、従来の船尾に設けられたスラスタと比較して効率的である。アジマスポッドは、船舶の主動力装置に対して比較的独立して配置させることができるので、レイアウトに関して高度のフレキシビリティを有している。非常に大型な船舶の場合には、アジマスポッドは、20メガワット(MW)以上の出力を発生させることができる。
【0004】
ポッド推進ユニットは、流体力学の観点から最適化されたポッド10内部に収容されている電気モータ20を含んでいるように構成されている。図2及び図3に表わす実施例を参照すると、電気モータ20は、ポッド10内に収容されているプロペラ又は駆動シャフト24を直接駆動するので、密閉されたポッド10の外側に配置されているプロペラ12が駆動される。駆動シャフト24が回転すると、摩擦、及び最終的には熱が、プロペラシャフト24とプロペラシャフト24を支持している1つ以上の軸受との間において生じる。さらに、プロペラシャフト24において発生したトルクが部分的に軸受に伝達される。図2及び図3は、2つの軸受アセンブリ、すなわちプロペラ12に近接したプロペラシャフト24の端部の近傍に配置されている駆動端側のラジアル軸受と、プロペラシャフト24の反対側端部の近傍に配置され且つプロペラ12から離隔配置されている非駆動端側のスラスト軸受32とを表わす。
【0005】
軸受の構成としては、様々な配置及び構造が挙げられる。図4は、図2に表わす軸受アセンブリ32の断面A−Aにおける断面図である。図4は、軸受アセンブリ50を表わし、従来のスラスト軸受の構成を表わす。このような構成は、スラスト球面ころ軸受と呼称される場合がある。スラスト球面ころ軸受は、前方転がり軸受機構52と後方転がり軸受機構54とから成る複列の球面ころを有しているスラスト軸受である。前方転がり軸受機構52は、プロペラシャフト60に隣り合っているテーパ状スリーブ58に接触している前方内輪すなわち前方シャフトワッシャ56と、前方内輪56から離隔配置されている前方外輪62と、前方内輪56と前方外輪62との間に位置決めされている複数の前方ころすなわち前方支持部64と、を含んでいる。同様に、後方転がり軸受機構54は、テーパ状スリーブ58に接触している後方内輪すなわち後方シャフトワッシャ66と、後方内輪66から離隔配置されている後方外輪68と、後方内輪66と後方外輪68との間に位置決めされている複数の後方ころすなわち後方支持部70と、を含んでいる。
【0006】
断面図のみに表わすが、前方内輪56及び後方内輪66と前方外輪62及び後方外輪68とが、ラジアル方向においてプロペラシャフト60を囲んでいる。前方ころすなわち前方支持部64と前方内輪56及び前方外輪62とが相互に作用する地点における表面が、軌道72と呼称される。同様に、後方ころすなわち後方支持部70と後方内輪66及び後方外輪68とが相互に作用する地点における表面も、軌道72と呼称される。動作中において、前方内輪56及び後方内輪66が、プロペラシャフト60に接続され、プロペラシャフト60と共に回転する。しかしながら、前方外輪62及び後方外輪68が、プロペラシャフト60に接続されておらず、一般にはプロペラシャフト60と共に回転することはない。従って、前方ころ64及び後方ころ70が、前方内輪56、後方内輪66、前方外輪62、及び後方外輪68の間において転動又は回転する。典型的には、前方ころ及び後方ころ、すなわち前方支持部及び後方支持部64,70は、前方ころ64及び後方ころ70が前方内輪56、後方内輪66、前方外輪62、及び後方外輪68に対して適切に位置合わせされた状態を維持するために、金属製ケージ内に保持されている。
【0007】
典型的には、ころ、内輪、及び外輪の表面は僅かに湾曲した面を有しており、この面はオスキュレーション(osculation)と呼称される。典型的には、オスキュレーションは、回転方向に対して横方向又はラジアル方向のおける、ころの曲率半径の軌道の曲率半径に対する比として定義される。オスキュレーションは、ころと軌道との隙間嵌めを提供し、これにより輪体及びころが、運転中に位置合わせ状態を維持することができる。より具体的には、他に利点があるにも関わらず、隙間嵌めによって、内部摩擦、屈曲、及び熱に起因して過度に接触することなく、プロペラシャフトが回転中に屈曲し、荷重負荷に起因する弾性膨張及び弾性圧縮によって、摩擦に起因する熱膨張と同様に、プロペラシャフトと内輪及び外輪とが膨張し、プロペラシャフトが、内輪及び外輪に対して芯ずれしてしまう。
【0008】
非特許文献1が、スラスト球面ころ軸受に関する説明に詳しく、参照によって本明細書に完全に組み込まれている。
【0009】
アキシアル方向の力/荷重とラジアル方向の力/荷重との両方が、プロペラシャフト60がプロペラを回転させている際にプロペラシャフト60に作用している。アキシアル荷重の向きとラジアル荷重の向きとが、プロペラシャフト60に結合されているモータの動作が正回転であるか逆回転であるかに従って変化する。方向に関係なく、プロペラシャフト60に結合されている軸受アセンブリが、船舶が運転している際におけるアキシアル荷重及びラジアル荷重に耐えるように構成されており、船舶が運転している際には摩擦を発生させるので、結果的に熱も発生させる。例えば石油のような潤滑剤は、スラスト軸受又はころを通じて循環し続け、スラスト軸受又はころから発生した顕著な摩擦及び熱を負荷として相殺するために利用される冷却システムは、スラスト軸受アセンブリに適用される。実際には、大型船舶のポッドシステムに作用する負荷が、ポッド及び該ポッドの構成部品のメンテナンス及び信頼性に関する問題を大きくする。例えば、特に予想外に大きなアキシアル荷重及びラジアル荷重並びにトルクをプロペラシャフト及び軸受アセンブリに作用させる高速度で回転又は不規則な運動をする際に、予想外に大きな最大負荷が発生すると考えられている。このような問題を克服するためのエンジニアによる解決策及び設計された構成部品に対する上述の努力にも関わらず、信頼性に関する問題及びメンテナンスに関する問題のうち幾つかの問題としては、プロペラシャフト、ころ、内輪及び外輪、並びに軸受システムの他の構成部品の性能劣化、ピッチング、スパリング、クラック、及び完全な破損が挙げられる。最終的な表面の損傷が、初期破損の原因となる典型的には軸受に作用するそれほど顕著ではない負荷が作用する際におけるさらなる損傷についての焦点になる。
【0010】
軸受の損傷の原因とは無関係に、最終的には予想外に、船舶は、ポッドを修理するために、例えば交換し、初期磨耗及び損傷した軸受アセンブリを修理するために数日又は数週間の間使用することができなくなる。
【0011】
従来技術に基づくスラスト軸受アセンブリに関する上述の問題を解決するために、高トルク式ポッド推進システムで利用するのに適した改善されたスラスト軸受アセンブリを提供しようとする様々な試みがなされてきた。これら問題を解決するために当業者が実行した初期の回答は、製造手法を改善すること、及び軸受/ころを製造するために様々な表面コーティング及び表面処理を軌道(runway)に適用するか、又は軸受/ころが受ける応力(力又は荷重/面積)を低減させるために単に軸受/ころの大きさ及び数量を増やすことに集中した。しかしながら、これら努力によっては、問題は解決されなかった。
【0012】
従って、改善された軸受アセンブリが既存のポッド推進システムに容易に改装可能なように従来技術に基づく軸受アセンブリと略同一の大きさを維持しているにも関わらず、荷重及び応力によって発生する損傷に対する耐久性及び耐性を向上させることができ、スパリング、クラック、及び他の障害を低減させることができる軸受アセンブリに対するニーズが存在する。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】米国特許第6935907号明細書
【非特許文献】
【0014】
【非特許文献1】2007年12月にSKFグループから発行された“SKF Spherical Roller Thrust Bearings for Long Lasting Performance”
【発明の概要】
【発明が解決しようとする課題】
【0015】
本明細書で説明される発明の様々な特徴及び実施形態が、実際に進行中の試験の対象であり、従来技術を越える顕著な改善を表わしている。他の改善点があるにも関わらず、本発明の実施形態は、現在のポッド推進システムの既存の空間及び既存の構造内に組み込み可能な程度に依然として小型な、堅牢性及び耐久性を有しているスラスト軸受アセンブリを提供する。当該実施例が、集合的に及び/又は個別に本発明が属する技術分野において予期せぬ発展を表わし、ポッド推進システムを、ポッド推進システムに作用する摩擦及びトルクが現行のポッド推進システムにおいて軸受アセンブリに作用している摩擦及びトルクよりも著しく大きくなる、より大型な船舶のためのより高出力な設計に拡張させることに成功するであろうと信じられている。
【課題を解決するための手段】
【0016】
本明細書に開示されるスラスト軸受アセンブリの実施例は、ポッド推進システムと共に利用される場合に幾つかの重要な機能を実行する。例えば、実施例における軸受アセンブリは、摩擦を低減し、プロペラシャフトからのアキシアル荷重及びラジアル荷重の伝達を改善することを示している一方、プロペラシャフトは、従来技術よりも高い回転速度で、例えば毎分150+回転(rpm)で順方向に回転し、例えば毎分90+回転(rpm)で逆方向に回転する。さらに、実施例における軸受アセンブリでは、プロペラシャフトが、アキシアル方向及びラジアル方向において、従来技術よりも良好に配置されている。
【0017】
以下に詳述するように、本発明の実施例は、従来技術のように独立した前方シャフトワッシャ及び後方シャフトワッシャを利用するのではなく、一のシャフトワッシャを利用すること、後方ころと比較して前方ころを僅かに延長すること、後方ころに対して相対的に前方ころの直径を大きくすること、ころの数を増やすこと、不純物がほとんど混入されていないように、特にシャフトワッシャの材料を改善すること、及びころと軌道との接触面積を小さくし、ころと軌道とが自在に運動するように構成されているオスキュレーションを含んでいる。軸受/ころ、シャフトワッシャ、及び外輪の間における接触面積を大きくする改善及び変更をすることによって、アキシアル荷重及びラジアル荷重によって発生する応力が低減される一方、既存のポッド推進システム内に取付可能な、さらに小型化された構成にすることができる。さらに、改善を集合させることによって、シャフトワッシャ、軸受/ころ、及び外輪の間における移動や遊隙を低減させることができる。結論として、本発明の実施例は、シャフトワッシャ、軸受/ころ、及び外輪に発生する障害の危険性を低減し、障害が発生した場合に該障害が悪化し、重大な損傷の原因となる可能性を低減することができる。
【0018】
また、漏出を検出するために上述のシステムを利用する方法が、本明細書に開示されている。
【0019】
本明細書では、“少なくとも1つ(at least one)”、“1つ以上(one or more)”、及び“及び/又は(and/or)”との記載は、変更可能な表現(open-ended expression)として利用されている。例えば、“A,B、及びCのうち少なくとも1つ(at least one of A, B and C)”、“A,B、又はCのうち少なくとも1つ(at least one of A, B, or C)”、“A,B、又はCのうち1つ以上(one or more of A, B, and C)”、及び“A,B、及び/又はC(A, B, and/or C)”との記載それぞれが、A単独、B単独、C単独、A及びBの両方、A及びCの両方、B及びCの両方、又はA,B、及びCの全体を意味する。
【0020】
本発明の様々な実施例が、本明細書及び特許請求の範囲にて具体化されているのと同様に、添付図面及び発明の詳細な説明に記載されている。しかしながら、本要約書には、1つ以上の本発明のうち実施態様及び実施例のすべてが含まれている訳ではなく、如何なる方法によっても制限されることも限定されることも意図していないことは言うまでもない。さらに、本明細書に開示される本発明が本発明に対する明白な改善及び改良を含んでいることは、当業者によって理解可能であることも言うまでもない。
【0021】
本発明のさらなる利点は、特に添付図面と共に精査した場合に、以下の説明から容易に明らかとなる。
【0022】
1つ以上の本発明における上述の利点及び特徴、並びに他の利点及び特徴をさらに明確にするために、本発明の特定の実施例の参照が添付図面に表わされている。図面は、例示的な実施例を示しているにすぎないので、限定的に考えてはいけない。1つ以上の実施例が、添付図面を参照することによって、さらに明示的且つ詳細に記載及び説明されている。但し、図面の縮尺は必ずしも正確ではない。
【図面の簡単な説明】
【0023】
【図1】従来技術に基づくポッド推進システムを表わす。
【図2】従来技術に基づくポッド推進システムの断面図である。
【図3】従来技術に基づくポッド推進システムの他の断面図である。
【図4】図2に表わす従来技術に基づくスラスト軸受構造の断面A−Aである。
【図5】ポッド推進システムで利用するためのスラスト軸受アセンブリの一の実施形態である。
【図6】ポッド推進システムで利用するためのスラスト軸受アセンブリの他の実施形態である。
【図7】ポッド推進システムで利用するためのスラスト軸受アセンブリの他の実施形態である。
【発明を実施するための形態】
【0024】
図5は、本願発明の第1の実施例である、大型船舶用ポッド推進システムに利用するための小型且つ高性能なスラスト球面ころ軸受アセンブリ100を表わす。大型船舶は、例えば大型クルーズ船であって、運転出力として10MWよりも大きな出力、好ましくは20MWよりも大きな出力、さらに好ましくは30MWよりも大きな出力、を発生可能である。ポッド推進システムに関するさらなる詳細については、特許文献1に開示されている。当該特許文献の全体が、参照によって本明細書に組み込まれている。
【0025】
図5に表わすように、スラスト球面ころ軸受アセンブリ100又は単なる軸受アセンブリ100が、プロペラシャフト102の周囲を囲んで径方向に配置されている。スラスト球面ころ軸受アセンブリ100は、前方ころ軸受機構104及び後方ころ軸受機構106を含む複列球面ころ軸受を有している。
【0026】
前方ころ軸受機構52が前方内輪すなわち前方シャフトワッシャ56を利用し、且つ、後方ころ軸受機構54が別の後方内輪すなわち後方シャフトワッシャ56を利用する、図4に表わす構成とは異なり、図5に表わす前方ころ軸受機構104及び後方ころ軸受機構106は、それぞれ単一の内輪すなわち内側シャフトワッシャ108と相互作用する。結論として、前方ころ軸受機構104と後方ころ軸受機構106とは、前方内輪及び後方内輪すなわち前方シャフトワッシャ及び後方シャフトワッシャを利用する図4に表わす構成ほど互いから独立していない。結論として、前方支持部及び後方支持部すなわち前方ころ114及び後方ころ116が不慮に移動しにくくなり、プロペラシャフト102から作用するラジアル方向力/荷重とアキシアル方向力/荷重とが、前方ころ114及び後方ころ116に沿ってさらに均等に分散される。
【0027】
高出力の用途において発生する歪み、荷重、及び疲労に対処するために必要な品質を有している大きな内輪すなわちシャフトワッシャ108を鍛造及び/又は製造することが極めて困難であったために、本発明よりも前の時代には、このような一体化されたシャフトワッシャが大規模利用のために必要であるか又は望ましいとは考えられていなかったが、単一のシャフトワッシャ108を利用することによって著しく改善される。単一のシャフトワッシャ108の実施例は、一般に、例えば鋼のような高品位材料から製造及び/又は鍛造されるが、他の種類の金属であっても、先行技術で利用される金属よりも著しく硬質であり且つ著しく純度が高ければ、本願発明の技術的範囲に属するものである。任意に、同一のプロセスが、前方外輪110及び後方外輪112と同様に、前方支持部/前方ころ114及び/又は後方支持部/後方ころ116を製造及び/又は鍛造するために利用可能とされる。これら要件に適合する内側シャフトワッシャ108と、前方支持部/前方ころ114及び/又は後方支持部/後方ころ116と、前方外輪110及び/又は後方外輪112とから成る軸受アセンブリが、SKFグループから販売されている。
【0028】
動作中、内側シャフトワッシャ108が、プロペラシャフト102と共通する回転軸線に沿って回転する。しかしながら、内側シャフトワッシャ108は、図4に表わす実施例とは異なり、従来の軸受アセンブリ100に図示されるようにテーパ状のスリーブ58を介在させることなく、プロペラシャフト102上に直接配置されている。内側シャフトワッシャ108の第1の表面120は、シャフトの表面122に隣り合っている斜面121を有しているように構成されている。斜面121の傾斜は、一般に約0°〜約10°の範囲にあり、より好ましくは約2.5°〜約7.5°の範囲にあり、さらにより好ましくは約4°〜約6°の範囲にあり、最も好ましくは約5度である。斜面121を含んでいるように内側シャフトワッシャ108を構成することによって、従来の軸受アセンブリと比較して、より小型且つ効率的な構成にすることができる。また、内側シャフトワッシャ108は、前方支持部/前方ころ114と後方支持部/後方ころ116とがそれぞれシャフトワッシャ108と相互作用する、前方軌道124及び後方軌道126を含んでいる。
【0029】
内側シャフトワッシャ108は、プロペラシャフト102が前進するための方向に回転する場合に発生するアキシアル方向力を前方支持部/前方ころ114の長手軸線136に沿って前方支持部/前方ころ114に作用させるための表面を備えているように構成されている、前方スペーサ130を備えている。内側シャフトワッシャ108は、プロペラシャフト102が後退するための方向に回転する場合に発生するアキシアル方向力を後方支持部/後方ころ116の長手軸線138に沿って後方支持部/後方ころ116に作用させるための表面を備えているように構成されている、後方スペーサ132を備えている。
【0030】
前方転がり軸受機構104及び後方転がり軸受機構106それぞれが、前方外輪110及び後方外輪112それぞれを含んでいる。一連の前方球面支持部/前方ころ114は、内側シャフトワッシャ108と前方外輪110との間に位置決めされている。同様に、一連の後方球面支持部/後方ころ116は、内側シャフトワッシャ108と後方外輪112との間に位置決めされている。典型的には黄銅、鋼、合金、又は他の金属から作られている金属製ケージが、好ましくは前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116を内側シャフトワッシャ108並びに前方外輪110及び後方外輪112それぞれに対して概略的に位置合わせし、これらの位置合わせを維持するために利用される。
【0031】
上述のように、前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116の長手軸線136,138に沿った長さは、一般に従来技術の対応する長さよりも長い。前方球面支持部/前方ころ114の長手軸線136に沿った長さは、後方球面支持部/後方ころ116の長手軸線138に沿った長さよりも長い場合がある。さらに、前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116の直径は、一般に従来技術の対応する直径よりも大きい。長さと同様に、前方球面支持部/前方ころ114の直径は、後方球面支持部/後方ころ116の直径よりも大きい場合がある。言い換えれば、前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116は、非対称である、すなわち互いに異なる長さ及び直径を有している場合がある。
【0032】
上述のようにプロペラシャフト102の回転速度が高められた結果として、船舶が前進する際に前方球面支持部/前方ころ114に作用するラジアル方向力/荷重及びアキシアル方向力/荷重が、船舶が後退又は逆進する際に後方球面支持部/後方ころ116に作用するラジアル方向力/荷重及びアキシアル方向力/荷重よりも著しく大きくなるので、前方球面支持部/前方ころ114と後方球面支持部/後方ころ116とが、このように非対称になっている。従って、後方球面支持部/後方ころ116の直径及び長さを小さくすることによって、前方球面支持部/前方ころ114の直径及び長さを大きくすることができる一方、従来技術に基づく支持機構の全体的な大きさ又は設置面積を維持することもできるので、本願に開示される実施例に基づくポッド推進システムが利用可能となる。これについては、以下に説明する通りである。
【0033】
上述の改善の結果として、前方球面支持部/前方ころ114の接触面積と後方球面支持部/後方ころ116の接触面積とが、前方軌道124及び後方軌道126それぞれに沿って大きくなるので、前方球面支持部/前方ころ114及び後方球面支持部/後方ころ116、内側シャフトワッシャ108、並びに前方外輪110及び後方外輪112に作用する応力が、運転中の所定の荷重においてより小さくなる。例えば、幾つかの従来技術における軸受アセンブリでは、約1200MPaの接触圧力が発生することが知られているが、図5に表わす実施例では、約1059MPaというより低い接触圧力が発生するにすぎないので、早期に故障する可能性が低減される。驚いたことには、このような結果が上述のように達成される一方、従来技術に基づく支持機構の全体的な大きさ又は設置面積を維持することができるので、本願に開示される実施例に基づくポッド推進システムを利用することができる。これについては、以下に説明する。上述のように、前方球面支持部/前方ころ114の表面と後方球面支持部/後方ころ116の表面とが、前方外輪124及び後方外輪126それぞれの対応又は一致する曲面又はオスキュレーションと共に湾曲するように、又は該曲面又は該接触面と接触するように構成されている。曲面同士は、締り嵌めとなるように構成されていない。むしろ、前方曲面支持部/ころ114及び後方曲面支持部/ころ116、内側シャフトワッシャ108、並びに前方外輪110及び後方外輪112が荷重が作用した状態において僅かに可撓性を有しているように、且つ、運転中の摩擦から発生する熱に起因して熱膨張することによって、上述の構成部材が運転中に相互作用するように、曲面又はオスキュレーション同士には僅かな差違が存在しているので、早期故障を招く過度な応力、摩擦、及び熱を発生させる締り嵌めにはなっていない。本発明の実施例は、より小さな寸法公差を、すなわち、より堅固なオスキュレーションを有しているので、接触圧力をより良好に最適化することができる。
【0034】
上述のように、前方ころ軸受機構104及び後方ころ軸受機構106は、エンベロープ134と呼称される所定の空間内に装着されるように構成されている。エンベロープ134は、自身の周囲内において、軸受ハウジング118及びプロペラシャフト102の様々な部分によって概略的に規定されている。好ましい実施例では、軸受アセンブリ100は、上述の改善点を有しているにも関わらず、軸受ハウジング118、前方ころ軸受機構104、及び後方ころ軸受機構106の大きさが従来技術に基づくエンベロープの大きさと略同一となるように構成されている。これにより、軸受ハウジング118、前方ころ軸受機構104、及び後方ころ軸受機構106が、現在稼働中のポッド推進システム内に配設された現行の軸受アセンブリに利用されているエンベロープ内で利用可能となる。このような恩恵によって、ポッド推進システムについてコストを要するリエンジニアリングを実施する必要なく、従来技術に基づく軸受アセンブリを容易に交換可能となる。
【0035】
図6は、30MW以上で動作する高出力ポッドを利用した場合に従来技術よりも優位であると思われる軸受アセンブリ150の他の実施例を表わす。当該実施例では、エンベロープ153の内部構成部品が、従来技術に基づく類似するエンベロープのための前方支持部/前方ころに対して前方支持部/前方ころ174を大きくするために、さらに改良されている。より具体的には、軸受アセンブリ150は、上述のように、前方支持部/前方ころ174の長さ及び幅を大きくすることによって、プロペラシャフト152が前方支持部/前方ころ174に伝達させるアキシアル方向荷重及びラジアル方向荷重に起因する応力を低減するように構成されている。そして、上述のように、前方支持部/前方ころ174の寸法をこのように変更することによって、故障する可能性が低減される。
【0036】
図6に表わすように、軸受アセンブリ150は、プロペラシャフト152を中心として径方向に配設されている。スラスト軸受アセンブリ150は、前方ころ軸受機構154及び後方ころ軸受機構156を含んでいる非対称な複式球面ころ軸受として構成されている。図5に表わす構成と同様に、前方ころ軸受機構154と後方ころ軸受機構156とがそれぞれ、単一の内輪、すなわち内側シャフトワッシャ158と相互作用している。その結果として、前方ころ軸受機構154と後方ころ軸受機構156とは、前方内輪及び後方内輪すなわち前方シャフトワッシャ及び後方シャフトワッシャを利用する図4に表わす構成ほど、互いにほとんど独立していない。その結果として、前方支持部すなわち前方ころ174と後方支持部すなわち後方ころ176とが、不意に移動することなく、プロペラシャフト152からのラジアル方向力/荷重とアキシアル方向力/荷重とが、前方ころ174及び後方ころ176に沿って、より均一に分散される。
【0037】
動作中、内側シャフトワッシャ158がプロペラシャフト152と共通する回転軸線を中心として回転する。しかしながら、内側シャフトワッシャ158は、図4に表わす実施例とは異なり、図4の従来型の軸受アセンブリ100に示すテーパ状スリーブ58を介在させることなく、プロペラシャフト152に直接配設されている。内側シャフトワッシャ158の第1の表面160は、シャフト表面162に隣り合っているスロープ161を有しているように構成されている。スロープ161は、一般に約0°〜約10°であり、より好ましくは約2.5°〜約7.5°であり、さらにより好ましくは約4°〜約6°であり、最も好ましくは約5°である。内側シャフトワッシャ158をスロープ161を含むように構成することによって、従来型の軸受アセンブリと比較して、より小型且つ効率的な構成とすることができる。また、内側シャフトワッシャ158は、前方軌道155及び後方軌道157を含んでいる。前方軌道155及び後方軌道157では、前方支持部/前方ころ174及び後方支持部/後方ころ176がそれぞれシャフトワッシャ158と相互作用する。
【0038】
内側シャフトワッシャ158は、前方スペーサ164を備えている。前方スペーサ164は、プロペラシャフト152が船舶を前進させる方向に回転した場合に発生する前方支持部/前方ころ174の長手方向軸線186に沿ったアキシアル方向力を前方支持部/前方ころ174によって作用させる、表面を有しているように構成されている。また、内側シャフトワッシャ158は、後方スペーサ166を備えている。後方スペーサ166は、プロペラシャフト152が船舶を後進させる方向に回転した場合に発生する後方支持部/後方ころ176の長手方向軸線188に沿ったアキシアル方向力を後方支持部/後方ころ176によって作用させる、表面を有しているように構成されている。
【0039】
前方ころ軸受機構154及び後方ころ軸受機構156がそれぞれ、前方外輪170及び後方外輪172それぞれを含んでいる。一連の前方球面支持部/前方ころ174が、内側シャフトワッシャ158と前方外輪170との間に配設されている。同様に、一連の後方球面支持部/後方ころ176が、内側シャフトワッシャ158と後方外輪172との間に配設されている。金属製ケージ、一般には黄銅、鋼、合金、又は他の金属から作られたケージが、好ましくは、内側シャフトワッシャ158、並びに前方外輪170及び後方外輪172それぞれに対して、前方支持部/前方ころ174と後方支持部/後方ころ176とを位置合わせし、その位置合わせを維持するために利用される。
【0040】
上述のように、前方支持部/前方ころ174及び後方支持部/後方ころ176は、一般に従来技術に基づく前方支持部/前方ころ及び後方支持部/後方ころと比較して、長手軸線186,188に沿って長くなっている。そして、当該実施例では、長手軸線186に沿った前方支持部/前方ころ174の長さは、長手軸線188に沿った後方支持部/後方ころ176の長さよりも長くなっている。さらに、前方支持部/前方ころ174及び後方支持部/後方ころ176の直径は、一般に従来技術に基づく前方支持部/前方ころ及び後方支持部/後方ころの直径よりも大きくなっている。言い換えれば、前方支持部/前方ころ174及び後方支持部/後方ころ176は、非対称である、すなわち互いに異なる長さ及び直径を有していると言われる場合がある。
【0041】
船舶が前進する際のプロペラシャフト152の回転速度が、船舶が後進又は逆進する際のプロペラシャフト152の回転速度よりも大きいことに起因にして、前方球面支持部/前方ころ174に作用するラジアル方向力及びアキシアル方向力/荷重が、後方球面支持部/後方ころ176に作用するラジアル方向力及びアキシアル方向力/荷重よりも著しく大きいので、前方球面支持部/前方ころ174と後方球面支持部/後方ころ176とが、このように非対称になっている。従って、上述のように、後方球面支持部/後方ころ176の直径及び長さを小さくすることによって、前方球面支持部/前方ころ174の直径及び長さを大きくすることができる一方、上述のように、エンベロープ153の全体的な大きさを従来技術に基づく支持機構のエンベロープの全体的な大きさと略同一に維持することもできる。
【0042】
上述の改善の結果として、前方球面支持部/前方ころ174及び後方球面支持部/後方ころ176の接触面積が、前方軌道155及び後方軌道157それぞれに沿って大きくなるので、前方球面支持部/前方ころ174及び後方球面支持部/後方ころ176、内側シャフトワッシャ158、並びに前方外輪170及び後方外輪172に作用する応力が、運転中の所定の荷重においては小さくなる。例えば、幾つかの従来技術における軸受アセンブリでは、約1200MPaの接触圧力が発生することが知られているが、図6に表わす実施例では、約953MPaというより低い接触圧力が発生するにすぎないので、早期に故障する可能性が低減される。驚いたことには、上述のようにこのような結果が達成される一方、従来技術に基づく支持機構の全体的な大きさ又は設置面積を維持することができるので、本願に開示される実施例に基づくポッド推進システムを利用することができる。これについては以下に説明する。
【0043】
軸受アセンブリ150の好ましい実施例では、軸受ハウジング159の長さ190は約468mmであり、内側シャフトワッシャ158の長さ192は約337.5mmである。最後に、図6に表わす軸受アセンブリ150の頂部から底部までの高さ194は約1020mmである。この好ましい実施例では、重量は約1765kgであり、シャフトに作用している重量は約1314kgである。現行の軸受取付アセンブリが据付の際に利用可能であることが望ましいので、これら重量は考慮に値する事項である。重量(又は大きさ)が著しく大きくなれば、その場合には、新しい取付システムが必要となるだろう。本願発明では、その構成を小型化することができるので、そのような必要がない。
【0044】
図7は、軸受アセンブリのさらなる他の実施例を表わす。軸受アセンブリ200は、プロペラシャフト204を中心として径方向に配置されている。軸受アセンブリ200の構成は、非対称な複式スラスト球面ころ軸受であり、前方ころ軸受機構214と後方ころ軸受機構242とを備えている。
【0045】
動作中、内側シャフトワッシャ202がプロペラシャフト204と共通する回転軸線を中心として回転する。しかしながら、内側シャフトワッシャ202は、図4に表わす実施例とは異なり、図4の従来型の軸受アセンブリ100のテーパ状スリーブ58を介在させることなく、プロペラシャフト204に直接配置されている。内側シャフトワッシャ202の第1の表面211は、シャフト表面210に隣り合っている斜面250を有しているように構成されている。斜面211は、一般に約0°〜約10°であり、より好ましくは約2.5°〜約7.5°であり、さらにより好ましくは約4°〜約6°であり、最も好ましくは約5°である。内側シャフトワッシャ202を斜面250を含むように構成することによって、従来型の軸受アセンブリと比較して、より小型且つ効率的な構成とすることができる。
【0046】
また、内側シャフトワッシャ202は、前方内輪206を後方内輪208から隔てるように構成されている隔離部分212を含んでいる。従って、軸受アセンブリ200は、図5及び図6に表わす内輪として機能する単一のシャフトワッシャ158を利用するのではなく、エンベロープ252内に独立した前方内輪206と後方内輪208とを含んでいる。
【0047】
また、内側シャフトワッシャ202は、前方支持部/前方ころ230が前方内輪206と相互作用するように、且つ、後方支持部/後方ころ232が後方内輪208と相互作用するように、前方軌道234及び後方軌道236を含んでいる。
【0048】
上述の理由のために、軸受アセンブリ200が、比較的大きな前方支持部/前方ころ230と比較的小さな後方支持部/後方ころ232とを有している。
【0049】
前方ころ軸受機構214及び後方ころ軸受機構242がそれぞれ、前方外輪240及び後方外輪242それぞれを含んでいる。一連の前方球面支持部/前方ころ230が、前方内輪206と前方外輪240との間に配設されている。同様に、一連の後方球面支持部/後方ころ232が、後方内輪208と後方外輪242との間に配設されている。金属製ケージ、一般に黄銅、鋼、合金、又は他の金属から作られたケージが、好ましくは、前方内輪206及び前方内輪208、並びに前方外輪170及び前方外輪172それぞれに対して、前方支持部/前方ころ230と後方支持部/後方ころ232とを位置合わせし、その位置合わせ状態を維持するために利用される。
【0050】
前方内輪206及び後方内輪208、前方支持部/前方ころ230及び後方支持部/後方ころ232、並びに前方外輪240及び後方外輪242それぞれが、アキシアル方向荷重及びラジアル方向荷重が作用した状態において、軌道234,236が最適な関係を維持するように、且つ、前方支持部/前方ころ230及び後方支持部/後方ころ232に沿ったより一様な荷重分布を維持することができるように、これら構成部品を移動及び調整可能に最適化された曲面又はオスキュレーションと空間とを備えているように構成されている。
【0051】
上述の改善の結果として、前方支持部/前方ころ230の接触面積と後方支持部/後方ころ232の接触面積とが、前方軌道234及び後方軌道236それぞれに沿ってより大きくなるので、前方支持部/前方ころ230及び後方支持部/後方ころ232、内側シャフトワッシャ202、並びに前方外輪240及び後方外輪242それぞれに作用する応力が、動作中における所定の荷重においてより小さくなる。例えば、幾つかの従来技術に基づく軸受アセンブリは、約1200MPaの接触面圧力を有していることが知られているが、図7に表わす実施例では、約943MPaというより低い接触面圧力が発生するにすぎないので、故障が早期に発生する可能性が低減される。驚いたことには、上述のようにこのような結果が達成される一方、従来技術に基づく支持機構の全体的な大きさ又は設置面積を維持することができるので、本願に開示される実施例に基づくポッド推進システムを利用することができる。これについては以下に説明する。
【0052】
軸受アセンブリ200の好ましい実施例では、軸受ハウジング244の長さ290は約500mmであり、内側シャフトワッシャ202の長さ292は約250mmである。最後に、図7に表わす軸受アセンブリ200の頂部から底部に至るまでの高さ294は約1150mmである。当該好ましい実施例では、重量が2186kgであり、シャフトに作用する重量が約1792kgである。現行の軸受取付アセンブリが据付の際に有用であることが望ましいので、これら重量は考慮に値する事項である。重量(又は大きさ)が著しく大きくなれば、その場合には、新しい取付システムが必要となるだろう。本願発明では、その構成を小型化することができるので、そのような必要がない。
【0053】
開示された軸受システムの実施例を形成及び/又は製造するための方法は、本発明の技術的範囲に属するものである。当業者であれば、上記開示内容を鑑みて当該方法が本発明に含まれていることを理解することができるが、当該方法が、第1のアキシアル方向力及び第1のラジアル方向力を支持するように構成された複数の前方支持部を準備するステップを少なくとも含んでいることも理解することができるだろう。当該方法は、第2のアキシアル方向力及び第2のラジアル方向力を支持するように構成された複数の後方支持部を準備するステップと、プロペラシャフトに結合されている内側シャフトワッシャであって、プロペラシャフトが順方向に回転した場合に第1のアキシアル方向力及び第1のラジアル方向力を複数の前方支持部に伝達するように、且つ、プロペラシャフトが逆方向に回転した場合に第2のアキシアル方向力及び第2のラジアル方向力を複数の後方支持部に伝達するように構成されている内側シャフトワッシャを準備するステップと、をさらに含んでいる。
【0054】
本発明は、様々な実施例において、例えば性能を向上させるために、簡便性を実現するために、及び/又は装置のコストを低減させるために、従来の装置又はプロセスにおいて利用されていたかもしれない構成部品が設けられていないことを含む、本明細書又は本明細書の様々な実施例に開示及び/又は示唆されていない、該構成部品が設けられていない装置及びプロセスを準備するステップを含んでいる。
【0055】
本発明に関する上述の説明は、図説及び説明をすることを目的として表わされている。上述の説明は、本発明を本明細書に開示される一の形態又は複数の形態に限定することを意図するものではない。例えば、上述の発明の詳細な説明では、本発明の様々な特徴が、開示内容を合理化するために一の実施例又は複数の実施例においてグループ化されている。開示の当該方法は、特許請求の範囲に記載される発明が各請求項に明確に記載される特徴以上の特徴を要求するという意図を反映させるように解釈することはできない。むしろ、以下の請求項が反映しているように、独創的な態様が単一の上述の実施例のすべての特徴を有している訳ではない。従って、以下の請求項が、本明細書によって発明の詳細な説明に組み込まれていると共に、各請求項が、本発明の別々の好ましい実施例として独立している。
【0056】
さらに、本発明の説明は、1つ以上の実施例、その変形例、及び改良例の説明を含んでいるが、他の変形例及び改良例も本発明の技術的範囲に属するものであり、例えば本明細書を理解した後に当業者であれば想到可能な範囲である。このことは、代替的な、相互交換可能な、及び/又は均等な構造、機能、範囲、又は工程が本明細書において開示されていてもいなくても、及び、特許可能な趣旨を公衆に示す意図がなくても、このような代替的な、相互交換可能な、及び/又は均等な構造、機能、該構造及び該機能が必要とする範囲及び工程を含んでいる、ある程度許容可能な代替的な実施例を含んでいることを意図するものである。
【符号の説明】
【0057】
10 ポッド推進システム(ポッド)
12 プロペラシャフト(大型船舶)
20 電気モータ
22 船舶の外殻
24 プロペラシャフト(駆動シャフト)
30 ラジアル軸受
32 スラスト軸受
52 前方ころ軸受機構
54 後方ころ軸受機構
56 前方内輪(前方シャフトワッシャ)
58 スリーブ
100 スラスト球面ころ軸受アセンブリ
102 プロペラシャフト
104 前方ころ軸受機構
106 後方ころ軸受機構
108 内側シャフトワッシャ
110 前方外輪
112 後方外輪
114 前方ころ(前方球面支持部/前方ころ)
116 後方ころ(後方球面支持部/後方ころ)
118 軸受ハウジング
120 第1の表面
121 斜面
122 シャフトの表面
124 前方軌道
126 後方軌道
130 前方スペーサ
132 後方スペーサ
134 エンベロープ
136 前方支持部/前方ころ114の長手軸線
138 後方支持部/後方ころ116の長手軸線
150 軸受アセンブリ
152 プロペラシャフト
153 エンベロープ
154 前方ころ軸受機構
155 前方軌道
156 後方ころ軸受機構
157 後方軌道
158 内側シャフトワッシャ
159 軸受ハウジング
160 第1の表面
161 スロープ
162 内側シャフトワッシャ158の第1の表面
164 前方スペーサ
166 後方スペーサ
170 前方外輪
172 後方外輪
174 前方支持部/前方ころ
176 後方支持部/後方ころ
186 前方支持部/前方ころ174の長手方向軸線
188 後方支持部/後方ころ176の長手方向軸線
190 軸受ハウジング159の長さ
192 内側シャフトワッシャ158の長さ
194 軸受アセンブリ150の頂部から底部までの高さ
200 軸受アセンブリ
202 内側シャフトワッシャ
204 プロペラシャフト
206 前方内輪
208 後方内輪
210 シャフト表面
211 第1の表面
212 隔離部分
214 前方ころ軸受機構
230 前方支持部/前方ころ
232 後方支持部/後方ころ
234 前方軌道
236 後方軌道
240 前方外輪
242 後方ころ軸受機構(後方外輪)
250 斜面
252 エンベロープ
290 軸受ハウジング244の長さ
292 内側シャフトワッシャ202の長さ
294 軸受アセンブリ200の頂部から底部に至るまでの高さ
【特許請求の範囲】
【請求項1】
プロペラシャフトを支持するように構成されている軸受アセンブリであって、
第1のアキシアル方向力及び第1のラジアル方向力を支持するように構成されている複数の前方支持部と、
第2のアキシアル方向力及び第2のラジアル方向力を支持するように構成されている複数の後方支持部と、
前記プロペラシャフトに結合されている内側シャフトワッシャであって、前記プロペラシャフトが前進方向に回転した場合に、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記複数の前方支持部に伝達するように構成されており、前記プロペラシャフトが後進方向に回転した場合に、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記複数の後方支持部に伝達するように構成されている前記内側シャフトワッシャと、
を備えていることを特徴とする軸受アセンブリ。
【請求項2】
前記複数の前方支持部それぞれが、第1の長さを有しており、
前記複数の後方支持部それぞれが、第2の長さを有しており、
前記第1の長さが、前記第2の長さよりも長いことを特徴とする請求項1に記載の軸受アセンブリ。
【請求項3】
前記複数の前方支持部それぞれが、第1の直径を有しており、
前記複数の後方支持部それぞれが、第2の直径を有しており、
前記第1の直径が、前記第2の直径よりも大きいことを特徴とする請求項1に記載の軸受アセンブリ。
【請求項4】
前記軸受アセンブリが、前記内側シャフトワッシャと前記複数の前方支持部との間に挿置されている前方内輪であって、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記内側シャフトワッシャから前記複数の前方支持部に伝達するように構成されている前記前方内輪を備えていることを特徴とする請求項1に記載の軸受アセンブリ。
【請求項5】
前記軸受アセンブリが、前記内側シャフトワッシャと前記複数の後方支持部との間に挿置されている後方内輪であって、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記内側シャフトワッシャから前記複数の後方支持部に伝達するように構成されている前記後方内輪を備えていることを特徴とする請求項4に記載の軸受アセンブリ。
【請求項6】
前記軸受アセンブリが、前記前方内輪から離隔して配置されている前方外輪を備えており、
前記複数の前方支持部が、前記前方内輪と前記前方外輪との間に挿置されていることを特徴とする請求項4に記載の軸受アセンブリ。
【請求項7】
前記軸受アセンブリが、前記後方内輪から離隔して配置されている後方外輪を備えており、
前記複数の後方支持部が、前記後方内輪と前記後方外輪との間に挿置されていることを特徴とする請求項5に記載の軸受アセンブリ。
【請求項8】
プロペラシャフトに回転力を付与するように構成されているモータと、
前記プロペラシャフトを支持するように構成されている軸受アセンブリであって、前記プロペラシャフトを軸受ハウジング内に保持するように構成されている前記軸受ハウジングを含んでいる前記軸受ハウジングと、
を含んでいるポッド推進システムにおいて、
前記軸受アセンブリが、
第1のアキシアル方向力及び第1のラジアル方向力を支持するように構成されている複数の前方支持部と、
第2のアキシアル方向力及び第2のラジアル方向力を支持するように構成されている複数の後方支持部と、
前記プロペラシャフトに結合されている内側シャフトワッシャであって、前記プロペラシャフトが前進方向に回転した場合に、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記複数の前方支持部に伝達するように構成されており、前記プロペラシャフトが後進方向に回転した場合に、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記複数の後方支持部に伝達するように構成されている前記内側シャフトワッシャと、
を備えていることを特徴とするポッド推進システム。
【請求項9】
前記軸受アセンブリが、前記内側シャフトワッシャと前記複数の前方支持部との間に挿置されている前方内輪であって、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記内側シャフトワッシャから前記複数の前方支持部に伝達するように構成されている前記前方内輪を備えていることを特徴とする請求項8に記載のポッド推進システム。
【請求項10】
前記軸受アセンブリが、前記内側シャフトワッシャと前記複数の後方支持部との間に挿置されている後方内輪であって、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記内側シャフトワッシャから前記複数の後方支持部に伝達するように構成されている前記後方内輪を備えていることを特徴とする請求項8に記載のポッド推進システム。
【請求項11】
前記軸受アセンブリが、前記前方内輪から離隔して配置されている前方外輪を備えており、
前記複数の前方支持部が、前記前方内輪と前記前方外輪との間に挿置されていることを特徴とする請求項9に記載のポッド推進システム。
【請求項12】
前記軸受アセンブリが、前記後方内輪から離隔して配置されている後方外輪を備えており、
前記複数の後方支持部が、前記後方内輪と前記後方外輪との間に挿置されていることを特徴とする請求項10に記載のポッド推進システム。
【請求項13】
船舶推進システム内においてプロペラシャフトを支持するための方法において、
第1のアキシアル方向力及び第1のラジアル方向力を支持するように構成されている複数の前方支持部を準備するステップと、
第2のアキシアル方向力及び第2のラジアル方向力を支持するように構成されている複数の後方支持部を準備するステップと、
前記プロペラシャフトに結合されている内側シャフトワッシャであって、前記プロペラシャフトが前進方向に回転した場合に、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記複数の前方支持部に伝達するように構成されており、前記プロペラシャフトが後進方向に回転した場合に、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記複数の後方支持部に伝達するように構成されている前記内側シャフトワッシャを準備するステップと、
を備えていることを特徴とする方法。
【請求項14】
前記方法が、前記内側シャフトワッシャと前記複数の前方支持部との間に挿置されている前方内輪であって、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記内側シャフトワッシャから前記複数の前方支持部に伝達するように構成されている前記前方内輪を準備するステップを備えていることを特徴とする請求項13に記載のポッド推進システム。
【請求項15】
前記方法が、前記内側シャフトワッシャと前記複数の後方支持部との間に挿置されている後方内輪であって、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記内側シャフトワッシャから前記複数の後方支持部に伝達するように構成されている前記後方内輪を準備するステップを備えていることを特徴とする請求項13に記載の軸受アセンブリ。
【請求項16】
前記方法が、前記複数の前方支持部が前記前方内輪と前記前方外輪との間に挿置されている状態において、前記前方内輪から離隔して配置されている前方外輪を準備するステップを備えていることを特徴とする請求項14に記載の方法。
【請求項17】
前記方法が、前記複数の後方支持部が前記後方内輪と前記後方外輪との間に挿置されている状態において、前記後方内輪から離隔した配置されている後方外輪を準備するステップを備えていることを特徴とする請求項15に記載の方法。
【請求項1】
プロペラシャフトを支持するように構成されている軸受アセンブリであって、
第1のアキシアル方向力及び第1のラジアル方向力を支持するように構成されている複数の前方支持部と、
第2のアキシアル方向力及び第2のラジアル方向力を支持するように構成されている複数の後方支持部と、
前記プロペラシャフトに結合されている内側シャフトワッシャであって、前記プロペラシャフトが前進方向に回転した場合に、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記複数の前方支持部に伝達するように構成されており、前記プロペラシャフトが後進方向に回転した場合に、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記複数の後方支持部に伝達するように構成されている前記内側シャフトワッシャと、
を備えていることを特徴とする軸受アセンブリ。
【請求項2】
前記複数の前方支持部それぞれが、第1の長さを有しており、
前記複数の後方支持部それぞれが、第2の長さを有しており、
前記第1の長さが、前記第2の長さよりも長いことを特徴とする請求項1に記載の軸受アセンブリ。
【請求項3】
前記複数の前方支持部それぞれが、第1の直径を有しており、
前記複数の後方支持部それぞれが、第2の直径を有しており、
前記第1の直径が、前記第2の直径よりも大きいことを特徴とする請求項1に記載の軸受アセンブリ。
【請求項4】
前記軸受アセンブリが、前記内側シャフトワッシャと前記複数の前方支持部との間に挿置されている前方内輪であって、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記内側シャフトワッシャから前記複数の前方支持部に伝達するように構成されている前記前方内輪を備えていることを特徴とする請求項1に記載の軸受アセンブリ。
【請求項5】
前記軸受アセンブリが、前記内側シャフトワッシャと前記複数の後方支持部との間に挿置されている後方内輪であって、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記内側シャフトワッシャから前記複数の後方支持部に伝達するように構成されている前記後方内輪を備えていることを特徴とする請求項4に記載の軸受アセンブリ。
【請求項6】
前記軸受アセンブリが、前記前方内輪から離隔して配置されている前方外輪を備えており、
前記複数の前方支持部が、前記前方内輪と前記前方外輪との間に挿置されていることを特徴とする請求項4に記載の軸受アセンブリ。
【請求項7】
前記軸受アセンブリが、前記後方内輪から離隔して配置されている後方外輪を備えており、
前記複数の後方支持部が、前記後方内輪と前記後方外輪との間に挿置されていることを特徴とする請求項5に記載の軸受アセンブリ。
【請求項8】
プロペラシャフトに回転力を付与するように構成されているモータと、
前記プロペラシャフトを支持するように構成されている軸受アセンブリであって、前記プロペラシャフトを軸受ハウジング内に保持するように構成されている前記軸受ハウジングを含んでいる前記軸受ハウジングと、
を含んでいるポッド推進システムにおいて、
前記軸受アセンブリが、
第1のアキシアル方向力及び第1のラジアル方向力を支持するように構成されている複数の前方支持部と、
第2のアキシアル方向力及び第2のラジアル方向力を支持するように構成されている複数の後方支持部と、
前記プロペラシャフトに結合されている内側シャフトワッシャであって、前記プロペラシャフトが前進方向に回転した場合に、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記複数の前方支持部に伝達するように構成されており、前記プロペラシャフトが後進方向に回転した場合に、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記複数の後方支持部に伝達するように構成されている前記内側シャフトワッシャと、
を備えていることを特徴とするポッド推進システム。
【請求項9】
前記軸受アセンブリが、前記内側シャフトワッシャと前記複数の前方支持部との間に挿置されている前方内輪であって、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記内側シャフトワッシャから前記複数の前方支持部に伝達するように構成されている前記前方内輪を備えていることを特徴とする請求項8に記載のポッド推進システム。
【請求項10】
前記軸受アセンブリが、前記内側シャフトワッシャと前記複数の後方支持部との間に挿置されている後方内輪であって、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記内側シャフトワッシャから前記複数の後方支持部に伝達するように構成されている前記後方内輪を備えていることを特徴とする請求項8に記載のポッド推進システム。
【請求項11】
前記軸受アセンブリが、前記前方内輪から離隔して配置されている前方外輪を備えており、
前記複数の前方支持部が、前記前方内輪と前記前方外輪との間に挿置されていることを特徴とする請求項9に記載のポッド推進システム。
【請求項12】
前記軸受アセンブリが、前記後方内輪から離隔して配置されている後方外輪を備えており、
前記複数の後方支持部が、前記後方内輪と前記後方外輪との間に挿置されていることを特徴とする請求項10に記載のポッド推進システム。
【請求項13】
船舶推進システム内においてプロペラシャフトを支持するための方法において、
第1のアキシアル方向力及び第1のラジアル方向力を支持するように構成されている複数の前方支持部を準備するステップと、
第2のアキシアル方向力及び第2のラジアル方向力を支持するように構成されている複数の後方支持部を準備するステップと、
前記プロペラシャフトに結合されている内側シャフトワッシャであって、前記プロペラシャフトが前進方向に回転した場合に、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記複数の前方支持部に伝達するように構成されており、前記プロペラシャフトが後進方向に回転した場合に、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記複数の後方支持部に伝達するように構成されている前記内側シャフトワッシャを準備するステップと、
を備えていることを特徴とする方法。
【請求項14】
前記方法が、前記内側シャフトワッシャと前記複数の前方支持部との間に挿置されている前方内輪であって、前記第1のアキシアル方向力及び前記第1のラジアル方向力を前記内側シャフトワッシャから前記複数の前方支持部に伝達するように構成されている前記前方内輪を準備するステップを備えていることを特徴とする請求項13に記載のポッド推進システム。
【請求項15】
前記方法が、前記内側シャフトワッシャと前記複数の後方支持部との間に挿置されている後方内輪であって、前記第2のアキシアル方向力及び前記第2のラジアル方向力を前記内側シャフトワッシャから前記複数の後方支持部に伝達するように構成されている前記後方内輪を準備するステップを備えていることを特徴とする請求項13に記載の軸受アセンブリ。
【請求項16】
前記方法が、前記複数の前方支持部が前記前方内輪と前記前方外輪との間に挿置されている状態において、前記前方内輪から離隔して配置されている前方外輪を準備するステップを備えていることを特徴とする請求項14に記載の方法。
【請求項17】
前記方法が、前記複数の後方支持部が前記後方内輪と前記後方外輪との間に挿置されている状態において、前記後方内輪から離隔した配置されている後方外輪を準備するステップを備えていることを特徴とする請求項15に記載の方法。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2012−500950(P2012−500950A)
【公表日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2011−524253(P2011−524253)
【出願日】平成21年8月27日(2009.8.27)
【国際出願番号】PCT/EP2009/006230
【国際公開番号】WO2010/022954
【国際公開日】平成22年3月4日(2010.3.4)
【出願人】(508282993)アクティエボラゲット・エスコーエッフ (42)
【Fターム(参考)】
【公表日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成21年8月27日(2009.8.27)
【国際出願番号】PCT/EP2009/006230
【国際公開番号】WO2010/022954
【国際公開日】平成22年3月4日(2010.3.4)
【出願人】(508282993)アクティエボラゲット・エスコーエッフ (42)
【Fターム(参考)】
[ Back to top ]