
ポリマー重合装置
【課題】種々の重合度若しくは生産量のポリマーを容易に製造できるポリマー重合装置を提供することにある。
【解決手段】重合槽6の内部には、高さを可変できる複数の堰7が設けられている。複数の堰の高さは、堰高さ制御装置5によって制御される。演算処理装置2は、形状データと、運転条件と、初期条件と、前記複数の堰のそれぞれの高さに関する複数のパターンに基づいて、前記重合槽の出口のポリマー重合度を重合度計算シミュレータを用いて演算し、重合によって生成されるポリマーの重合度及び生産量に関する目標値に対して、この目標値を達成する前記複数の堰のそれぞれの高さを抽出する。堰高さ制御装置5は、演算処理装置2によって抽出された堰高さに基づいて、複数の堰の高さを制御して、ポリマーを生成する。
【解決手段】重合槽6の内部には、高さを可変できる複数の堰7が設けられている。複数の堰の高さは、堰高さ制御装置5によって制御される。演算処理装置2は、形状データと、運転条件と、初期条件と、前記複数の堰のそれぞれの高さに関する複数のパターンに基づいて、前記重合槽の出口のポリマー重合度を重合度計算シミュレータを用いて演算し、重合によって生成されるポリマーの重合度及び生産量に関する目標値に対して、この目標値を達成する前記複数の堰のそれぞれの高さを抽出する。堰高さ制御装置5は、演算処理装置2によって抽出された堰高さに基づいて、複数の堰の高さを制御して、ポリマーを生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ポリエチレンテレフタレートや、ポリカーボネイト等の合成ポリマーを製造するポリマー製造プラントに用いられるポリマー重合装置に関する。
【背景技術】
【0002】
ポリマーは、その用途等に応じて、分子量,分子量分布,組成などが異なる複数種のポリマーが存在する。ポリマー製造プラントでは、同一の重合槽を用いて、攪拌翼の回転数、重合槽内部の真空度および重合槽内部温度等の運転条件を切り替えて、ポリマーの重合度の異なる複数種のポリマーを製造している。
【0003】
従来のポリマー製造プラントでは、例えば、特開2000−319302号公報に記載のように、運転条件を基にプラント出口のポリマー重合度を計算する重合度計算シミュレータを用い、その予測結果に基づいておのおのの運転条件を制御するものが知られている。
【0004】
【特許文献1】特開2000−319302号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、ポリマー製造プラントの実際の運用では、設計時に予定されていたポリマー製品種別または重合度または生産量とは異なる種別または重合度または生産量を指定して運転することがしばしば行われる。このようなポリマー製品種別または重合度または生産量を達成するために、運転条件を標準状態より変更して対処していた。しかし、運転条件の一つである攪拌翼の回転数は、モーター等の攪拌動力源の出力限界値で制限され、重合槽内部の真空度は、真空ポンプの性能限界で制限される。また、重合槽内部温度は、低過ぎると反応が進行せず、高過ぎると剰余の反応副生成物が増加したり、目的物質とは異なる最終生成物が得られたりする等の問題がある。したがって、これらの運転条件を変更するだけでは、標準状態からの変更の度合いに制限があり、目的の重合度または生産量を達成できないという問題があった。
【0006】
本発明の目的は、種々の重合度若しくは生産量のポリマーを容易に製造できるポリマー重合装置を提供することにある。
【課題を解決するための手段】
【0007】
(1)上記目的を達成するために、本発明は、原料を重合反応させる重合槽を用いてポリマーを製造するポリマー重合装置であって、前記重合槽の内部に設けられるとともに、その高さを可変できる複数の堰と、これらの複数の堰の高さをそれぞれ制御する堰高さ制御手段を備えるようにしたものである。
かかる構成により、種々の重合度若しくは生産量のポリマーを容易に製造できるものとなる。
【0008】
(2)上記(1)において、好ましくは、前記重合槽の形状に関する形状データと、前記重合槽を運転する時の条件である運転条件と、重合時の初期条件と、前記複数の堰のそれぞれの高さに関する複数のパターンに基づいて、前記重合槽の出口のポリマー重合度を重合度計算シミュレータを用いて演算し、重合によって生成されるポリマーの重合度及び生産量に関する目標値に対して、この目標値を達成する前記複数の堰のそれぞれの高さを抽出する演算処理手段を備え、この演算処理手段によって抽出された堰高さに基づいて、前記堰高さ制御手段により、前記複数の堰の高さを制御して、ポリマーを生成するようにしたものである。
【発明の効果】
【0009】
本発明によれば、目的とする重合度若しくは生産量のポリマーを容易に製造できるものとなる。
【発明を実施するための最良の形態】
【0010】
以下、図1〜図3を用いて、本発明の一実施形態によるポリマー重合装置の構成及び動作について説明する。
最初に、図1を用いて、本実施形態によるポリマー重合装置のシステム構成について説明する。
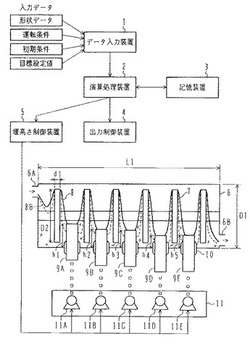
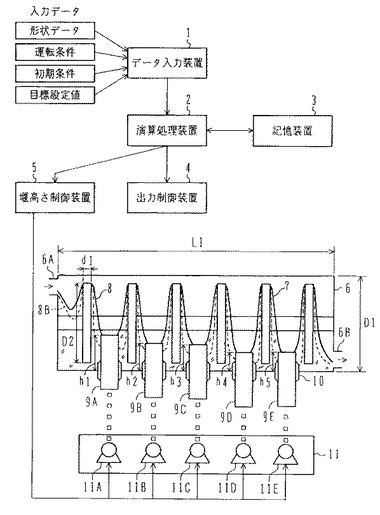
図1は、本発明の一実施形態によるポリマー重合装置のシステム構成を示すブロック図である。
【0011】
ポリマー重合装置の制御装置は、データ入力装置1と、演算処理装置2と、記憶装置3と、出力表示装置4と、堰高さ制御装置5とから構成される。ポリマー重合装置の重合槽装置は、重合槽6と、攪拌翼7と、堰9と、堰駆動装置11とから構成されている。
【0012】
最初に、重合槽装置の構成について説明する。重合槽6は、円筒形状であり、その軸方向が水平方向となるように設置されている。重合槽6の内径D1は、例えば、3mであり、軸方向の内側の長さL1は、例えば、10mである。重合槽6は、原料を投入する入口部6Aと、重合槽6の内部で投入された原料が重合反応して生成したポリマーが排出される出口部6Bとを備えている。重合槽6の内部は、所定の真空度Pr1で、所定の内部温度T1に保持される。また、重合槽6に流入する原料の流量Qu1は、予め設定されている。
【0013】
重合槽6の内部には、回転される複数の攪拌翼7が備えられている。図示の例では、攪拌翼7の枚数は、6枚である。攪拌翼7の直径D2は、重合槽6の内径D1より僅かに小さく、例えば、2.96mである。攪拌翼7の厚さd1は、例えば、2cmである。攪拌翼6の回転数N1は、図示しないモータ等の駆動源を制御することで、変えることができる。また、重合槽6の下部底面からは、複数の堰9A,9B,9C,9D,9Eが、重合槽6の内部に突出している。堰9A,9B,9C,9D,9Eは、それぞれ、隣接する攪拌翼7の間隙に配置されている。堰9A,…,9Eは、それぞれ、モータ11A,…,11E等からなる堰駆動装置11によって駆動され、上下方向の高さH1,H2,H3,H4,H5を可変できる構成となっている。堰9A,…,9Eの高さは、堰高さ制御装置5からの制御指令に基づいて、堰駆動装置11が動作することで可変される。なお、堰9と重合槽6の接続面には、堰9の移動に伴い重合槽6からポリマー8が流出するのを防止するため、シール材10が配置されている。
【0014】
ポリマー製造プラントでは、投入された原料は、重合槽6の内部で攪拌混合され、加熱され、重合槽6の内部を減圧することで気体状の反応副生成物を除去して、重合反応が進行する。一般に重合反応は、反応温度および副生成物除去の2つの要因で進行する。そのため、混合溶液を攪拌翼等で攪拌することで、混合溶液の表面積を増加させ、液表面からの蒸発によって反応副生成物の除去を促進させる。
【0015】
従来の重合槽においては、堰は設けられておらず、入口部6Aから流入した原料が重合槽6の内部で攪拌翼7によって攪拌され、重合反応してポリマーが生成され、出口部6Bから排出される。そのときの重合槽6の内部における液面は、破線で示す液面8Bとなっている。すなわち、堰がないときの液面は、入口部6Aで高く、出口部6Bで低くなり、途中、攪拌翼7によって液面が持ち上げられる状態となっている。
【0016】
一方、本実施形態では、重合槽6の内部に、複数の堰9A,…,9Eを設けているため、堰9A,…,9Eの部分で重合槽6の内部の液体が堰き止められることとなり、そのときの液面は、実線で示す液面8となる。このように、重合槽6の内部に複数の堰9A,…,9Eを設けることで、重合槽6の内部における液体の流れが阻害され、内部液量を増加させることができる。このように、重合槽6の内部での混合溶液量を増加させることで、原料の流入速度が同じ場合、重合槽内に滞留する時間,すなわち反応時間を長くし、ポリマー重合度を上げることができる。すなわち、重合槽内に堰を設けることで、堰を設けない場合に較べて、重合槽6の出口部6Bにおけるポリマー重合度を上げることができる。さらに、堰9A,…,9Eに高さH1,…,H5を、堰高さ制御装置5によって可変することで、重合槽6の内部における内部液量を可変できるため、重合槽6の出口部6Bにおけるポリマー重合度を可変することができる。
【0017】
次に、ポリマー重合装置の制御装置の構成及び動作について説明する。データ入力装置1は、演算処理装置2において計算すべき対象の入力データが入力される。入力データとしては、重合槽の形状等に関する形状データ,重合槽を運転する時の条件である運転条件,重合時の初期条件,重合によって生成されるポリマーの目標設定値等がある。形状データとしては、重合槽の直径,流下方向の長さ,攪拌翼の直径,幅,翼枚数、翼種別等がある。翼種別とは、攪拌翼7の形状であり、単なる円盤状の翼や、2枚の円盤が回転軸に固定されためがね形状の翼などの種別である。運転条件としては、攪拌翼の回転数、重合槽内部の真空度、重合槽内部温度、流量等がある。初期条件は、重合槽入口における重合度、重合槽入口における温度、初期堰高さ等の初期値データである。目標設定値は、出口重合度、生産量等の目標値である。ここで、データ入力装置1から入力されたデータは、演算処理装置2へ送られる。
【0018】
演算処理装置2は、堰9A,…,9Eによる内部液量増加の効果を、重合槽6の流下方向の長さL1、重合槽の直径D1などの形状データと組み合わせ、流体解析プログラムを用いて、重合槽内部の流動状態を計算する。演算処理装置2は、さらに、得られた流動状態と、攪拌翼の回転数、重合槽内部の真空度、重合槽内部温度などの運転条件から、化学反応シミュレータを用いて、重合度を計算する。さらに、演算処理装置2は、重合槽内の複数個所に設置した堰9A,…,9Eの高さH1,…,H5に関して、組み合わせを複数個用意し、おのおのに対して計算シミュレータを適用し、目的とする重合度を満たす組み合わせを見いだす。複数の重合度及び生産量毎に求められた堰9A,…,9Eの高さH1,…,H5の組合せデータは、記憶装置3に格納される。演算処理装置2は、目的とする重合度及び生産量である目標設定値を達成するための、堰9A,…,9Eの高さH1,…,H5の組合せを、記憶装置3に格納されたデータから見い出し、適切な堰高さのデータを出力表示装置4に表示するとともに、堰高さ制御装置5に出力する。堰高さ制御装置5は、この堰9A,…,9Eの高さH1,…,H5の組合せに基づいて、堰駆動装置11に制御指令を出力し、堰9A,…,9Eの高さH1,…,H5を制御することで、目標とする重合度及び生産量のポリマーを製造することができる。
【0019】
ここで、図2及び図3を用いて、本実施形態によるポリマー重合装置の演算処理装置における処理内容について説明する。
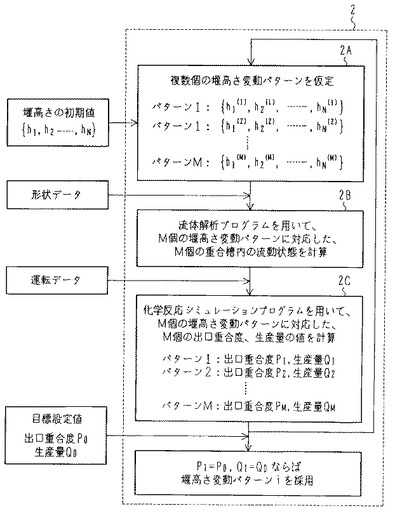
図2は、本発明の一実施形態によるポリマー重合装置の演算処理装置における処理内容を機能ブロック図である。図3は、本発明の一実施形態によるポリマー重合装置の演算処理装置における処理結果の説明図である。
【0020】
演算処理装置2は、入力データに対して、記憶装置3に内蔵された3種類のプログラムによって演算を実行する。3種類の内、2種類は、重合度計算シュミレータであり、1)重合槽内の液体の流動状態を決定する流体解析プログラムと、2)重合槽内の重合反応を計算する化学反応シミュレーションプログラムとからなる。流体解析プログラムとしては、市販の汎用流体解析プログラムを使用することができる。例えば、Flow-Science社の汎用流体解析プログラムFLOW−3Dを用いることができる。化学反応シミュレーションプログラムとしては、市販の化学反応シミュレーションプログラムを使用することができる。例えば、ここでは、自社開発の化学反応シミュレーションプログラムを利用している。第3のプログラムは、堰高さの組み合わせを選択するプログラムである。
【0021】
図2に示すように、演算処理装置2は、処理ブロック2Aにおいて、データ入力装置1から入力した初期値データの中で堰高さの初期値(h1,h2,…,hN)に対して、複数個の堰高さの変動パターンを仮定して、
例えば、パターン1:(h1(1),h2(1),…,hN(1)),パターン2:(h1(2),h2(2),…,hN(2)),…,パターンM:(h1(M),h2(M),…,hN(M))のように、設定する。
【0022】
次に、処理ブロック2Bは、重合度計算シミュレータの流体解析プログラムを用いて、処理ブロック2Aで設定した複数の堰高さパターン1〜Mに対する重合槽6の内部の流動状態を計算する。
【0023】
次に、処理ブロック2Cは、処理ブロック2Bで求められた流動状態に対して、重合度計算シュミレータの化学反応シミュレーションプログラムを用いて、複数の堰高さパターン1〜Mに対する重合槽6の出口における重合度及び生産量を計算して、複数のパターン1〜Mに対する出口重合度と生産量の組合せ(P1,Q1;P1,Q2;…;PM,QM)を算出する。
【0024】
ここで、出口重合度として、例えば、100,110,120,130,140,150,160,170,180,190,200の11種類を、また、生産量として、例えば、80t/日,100t/日,120t/日の3種類が一般的な数値とすると、合計33パターンの出口重合度及び生産量となるため、これらの33パターンが得られるような堰高さのパターンを予め算出する。そして、算出された堰高さパターンは、記憶装置3に格納される。一般に、堰高さが上がると重合槽内の内部液量は増加する。また、生産量を固定した場合、ポリマー重合度は内部液量と比例関係にある。よって、本プログラムのアルゴリズムにより、与えられた生産量とポリマー重合度の双方を満足する堰高さ変動パターンは発見可能である。
【0025】
処理ブロック2Cは、データ入力装置1から入力された目標設置値を達成する堰高さパターンを、記憶装置3に格納されている堰高さパターンから抽出する。抽出された堰高さパターンは、出力表示装置4に表示される。
【0026】
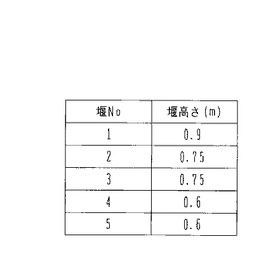
図3は、出力表示例を示している。図3に示す例では、所定の重合度及び生産量を得るための堰高さパターンとして、重合槽6の入口部6Aに最も近い側に位置するNo.1の堰高さを0.9mとし、順次出口側に近づくNo.2の堰高さを0.75mとし、No.3の堰高さを0.75mとし、No.4の堰高さを0.6mとし、No.5の堰高さを0.6mとする堰高さパターンが抽出されたことを示している。また、演算処理装置2は、目的とする重合度及び生産量である目標設定値を達成するための、堰9A,…,9Eの高さH1,…,H5の組合せを、堰高さ制御装置5に出力する。堰高さ制御装置5は、この堰9A,…,9Eの高さH1,…,H5の組合せに基づいて、堰駆動装置11に制御指令を出力し、堰9A,…,9Eの高さH1,…,H5を制御することで、目標とする重合度及び生産量のポリマーを製造することができる。
【0027】
以上説明したように、本実施形態によれば、堰高さを制御することで、広範囲の重合度または生産量に対応した、重合槽の運転制御が可能となる。なお、前述した33のパターンとは、1種類のポリマー製品に対するものであり、他のポリマー製品種別に対しても、それぞれの堰高さパターンを用意することで、複数のポリマー製品種別にも対応することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の一実施形態によるポリマー重合装置のシステム構成を示すブロック図である。
【図2】本発明の一実施形態によるポリマー重合装置の演算処理装置における処理内容を機能ブロック図である。
【図3】本発明の一実施形態によるポリマー重合装置の演算処理装置における処理結果の説明図である。
【符号の説明】
【0029】
1…データ入力装置
2…演算処理装置
3…記憶装置
4…出力表示装置
5…堰高さ制御装置
6…重合槽
7…攪拌翼
8…ポリマー
9…堰
10…シール材
11…堰駆動装置
【技術分野】
【0001】
本発明は、ポリエチレンテレフタレートや、ポリカーボネイト等の合成ポリマーを製造するポリマー製造プラントに用いられるポリマー重合装置に関する。
【背景技術】
【0002】
ポリマーは、その用途等に応じて、分子量,分子量分布,組成などが異なる複数種のポリマーが存在する。ポリマー製造プラントでは、同一の重合槽を用いて、攪拌翼の回転数、重合槽内部の真空度および重合槽内部温度等の運転条件を切り替えて、ポリマーの重合度の異なる複数種のポリマーを製造している。
【0003】
従来のポリマー製造プラントでは、例えば、特開2000−319302号公報に記載のように、運転条件を基にプラント出口のポリマー重合度を計算する重合度計算シミュレータを用い、その予測結果に基づいておのおのの運転条件を制御するものが知られている。
【0004】
【特許文献1】特開2000−319302号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、ポリマー製造プラントの実際の運用では、設計時に予定されていたポリマー製品種別または重合度または生産量とは異なる種別または重合度または生産量を指定して運転することがしばしば行われる。このようなポリマー製品種別または重合度または生産量を達成するために、運転条件を標準状態より変更して対処していた。しかし、運転条件の一つである攪拌翼の回転数は、モーター等の攪拌動力源の出力限界値で制限され、重合槽内部の真空度は、真空ポンプの性能限界で制限される。また、重合槽内部温度は、低過ぎると反応が進行せず、高過ぎると剰余の反応副生成物が増加したり、目的物質とは異なる最終生成物が得られたりする等の問題がある。したがって、これらの運転条件を変更するだけでは、標準状態からの変更の度合いに制限があり、目的の重合度または生産量を達成できないという問題があった。
【0006】
本発明の目的は、種々の重合度若しくは生産量のポリマーを容易に製造できるポリマー重合装置を提供することにある。
【課題を解決するための手段】
【0007】
(1)上記目的を達成するために、本発明は、原料を重合反応させる重合槽を用いてポリマーを製造するポリマー重合装置であって、前記重合槽の内部に設けられるとともに、その高さを可変できる複数の堰と、これらの複数の堰の高さをそれぞれ制御する堰高さ制御手段を備えるようにしたものである。
かかる構成により、種々の重合度若しくは生産量のポリマーを容易に製造できるものとなる。
【0008】
(2)上記(1)において、好ましくは、前記重合槽の形状に関する形状データと、前記重合槽を運転する時の条件である運転条件と、重合時の初期条件と、前記複数の堰のそれぞれの高さに関する複数のパターンに基づいて、前記重合槽の出口のポリマー重合度を重合度計算シミュレータを用いて演算し、重合によって生成されるポリマーの重合度及び生産量に関する目標値に対して、この目標値を達成する前記複数の堰のそれぞれの高さを抽出する演算処理手段を備え、この演算処理手段によって抽出された堰高さに基づいて、前記堰高さ制御手段により、前記複数の堰の高さを制御して、ポリマーを生成するようにしたものである。
【発明の効果】
【0009】
本発明によれば、目的とする重合度若しくは生産量のポリマーを容易に製造できるものとなる。
【発明を実施するための最良の形態】
【0010】
以下、図1〜図3を用いて、本発明の一実施形態によるポリマー重合装置の構成及び動作について説明する。
最初に、図1を用いて、本実施形態によるポリマー重合装置のシステム構成について説明する。
図1は、本発明の一実施形態によるポリマー重合装置のシステム構成を示すブロック図である。
【0011】
ポリマー重合装置の制御装置は、データ入力装置1と、演算処理装置2と、記憶装置3と、出力表示装置4と、堰高さ制御装置5とから構成される。ポリマー重合装置の重合槽装置は、重合槽6と、攪拌翼7と、堰9と、堰駆動装置11とから構成されている。
【0012】
最初に、重合槽装置の構成について説明する。重合槽6は、円筒形状であり、その軸方向が水平方向となるように設置されている。重合槽6の内径D1は、例えば、3mであり、軸方向の内側の長さL1は、例えば、10mである。重合槽6は、原料を投入する入口部6Aと、重合槽6の内部で投入された原料が重合反応して生成したポリマーが排出される出口部6Bとを備えている。重合槽6の内部は、所定の真空度Pr1で、所定の内部温度T1に保持される。また、重合槽6に流入する原料の流量Qu1は、予め設定されている。
【0013】
重合槽6の内部には、回転される複数の攪拌翼7が備えられている。図示の例では、攪拌翼7の枚数は、6枚である。攪拌翼7の直径D2は、重合槽6の内径D1より僅かに小さく、例えば、2.96mである。攪拌翼7の厚さd1は、例えば、2cmである。攪拌翼6の回転数N1は、図示しないモータ等の駆動源を制御することで、変えることができる。また、重合槽6の下部底面からは、複数の堰9A,9B,9C,9D,9Eが、重合槽6の内部に突出している。堰9A,9B,9C,9D,9Eは、それぞれ、隣接する攪拌翼7の間隙に配置されている。堰9A,…,9Eは、それぞれ、モータ11A,…,11E等からなる堰駆動装置11によって駆動され、上下方向の高さH1,H2,H3,H4,H5を可変できる構成となっている。堰9A,…,9Eの高さは、堰高さ制御装置5からの制御指令に基づいて、堰駆動装置11が動作することで可変される。なお、堰9と重合槽6の接続面には、堰9の移動に伴い重合槽6からポリマー8が流出するのを防止するため、シール材10が配置されている。
【0014】
ポリマー製造プラントでは、投入された原料は、重合槽6の内部で攪拌混合され、加熱され、重合槽6の内部を減圧することで気体状の反応副生成物を除去して、重合反応が進行する。一般に重合反応は、反応温度および副生成物除去の2つの要因で進行する。そのため、混合溶液を攪拌翼等で攪拌することで、混合溶液の表面積を増加させ、液表面からの蒸発によって反応副生成物の除去を促進させる。
【0015】
従来の重合槽においては、堰は設けられておらず、入口部6Aから流入した原料が重合槽6の内部で攪拌翼7によって攪拌され、重合反応してポリマーが生成され、出口部6Bから排出される。そのときの重合槽6の内部における液面は、破線で示す液面8Bとなっている。すなわち、堰がないときの液面は、入口部6Aで高く、出口部6Bで低くなり、途中、攪拌翼7によって液面が持ち上げられる状態となっている。
【0016】
一方、本実施形態では、重合槽6の内部に、複数の堰9A,…,9Eを設けているため、堰9A,…,9Eの部分で重合槽6の内部の液体が堰き止められることとなり、そのときの液面は、実線で示す液面8となる。このように、重合槽6の内部に複数の堰9A,…,9Eを設けることで、重合槽6の内部における液体の流れが阻害され、内部液量を増加させることができる。このように、重合槽6の内部での混合溶液量を増加させることで、原料の流入速度が同じ場合、重合槽内に滞留する時間,すなわち反応時間を長くし、ポリマー重合度を上げることができる。すなわち、重合槽内に堰を設けることで、堰を設けない場合に較べて、重合槽6の出口部6Bにおけるポリマー重合度を上げることができる。さらに、堰9A,…,9Eに高さH1,…,H5を、堰高さ制御装置5によって可変することで、重合槽6の内部における内部液量を可変できるため、重合槽6の出口部6Bにおけるポリマー重合度を可変することができる。
【0017】
次に、ポリマー重合装置の制御装置の構成及び動作について説明する。データ入力装置1は、演算処理装置2において計算すべき対象の入力データが入力される。入力データとしては、重合槽の形状等に関する形状データ,重合槽を運転する時の条件である運転条件,重合時の初期条件,重合によって生成されるポリマーの目標設定値等がある。形状データとしては、重合槽の直径,流下方向の長さ,攪拌翼の直径,幅,翼枚数、翼種別等がある。翼種別とは、攪拌翼7の形状であり、単なる円盤状の翼や、2枚の円盤が回転軸に固定されためがね形状の翼などの種別である。運転条件としては、攪拌翼の回転数、重合槽内部の真空度、重合槽内部温度、流量等がある。初期条件は、重合槽入口における重合度、重合槽入口における温度、初期堰高さ等の初期値データである。目標設定値は、出口重合度、生産量等の目標値である。ここで、データ入力装置1から入力されたデータは、演算処理装置2へ送られる。
【0018】
演算処理装置2は、堰9A,…,9Eによる内部液量増加の効果を、重合槽6の流下方向の長さL1、重合槽の直径D1などの形状データと組み合わせ、流体解析プログラムを用いて、重合槽内部の流動状態を計算する。演算処理装置2は、さらに、得られた流動状態と、攪拌翼の回転数、重合槽内部の真空度、重合槽内部温度などの運転条件から、化学反応シミュレータを用いて、重合度を計算する。さらに、演算処理装置2は、重合槽内の複数個所に設置した堰9A,…,9Eの高さH1,…,H5に関して、組み合わせを複数個用意し、おのおのに対して計算シミュレータを適用し、目的とする重合度を満たす組み合わせを見いだす。複数の重合度及び生産量毎に求められた堰9A,…,9Eの高さH1,…,H5の組合せデータは、記憶装置3に格納される。演算処理装置2は、目的とする重合度及び生産量である目標設定値を達成するための、堰9A,…,9Eの高さH1,…,H5の組合せを、記憶装置3に格納されたデータから見い出し、適切な堰高さのデータを出力表示装置4に表示するとともに、堰高さ制御装置5に出力する。堰高さ制御装置5は、この堰9A,…,9Eの高さH1,…,H5の組合せに基づいて、堰駆動装置11に制御指令を出力し、堰9A,…,9Eの高さH1,…,H5を制御することで、目標とする重合度及び生産量のポリマーを製造することができる。
【0019】
ここで、図2及び図3を用いて、本実施形態によるポリマー重合装置の演算処理装置における処理内容について説明する。
図2は、本発明の一実施形態によるポリマー重合装置の演算処理装置における処理内容を機能ブロック図である。図3は、本発明の一実施形態によるポリマー重合装置の演算処理装置における処理結果の説明図である。
【0020】
演算処理装置2は、入力データに対して、記憶装置3に内蔵された3種類のプログラムによって演算を実行する。3種類の内、2種類は、重合度計算シュミレータであり、1)重合槽内の液体の流動状態を決定する流体解析プログラムと、2)重合槽内の重合反応を計算する化学反応シミュレーションプログラムとからなる。流体解析プログラムとしては、市販の汎用流体解析プログラムを使用することができる。例えば、Flow-Science社の汎用流体解析プログラムFLOW−3Dを用いることができる。化学反応シミュレーションプログラムとしては、市販の化学反応シミュレーションプログラムを使用することができる。例えば、ここでは、自社開発の化学反応シミュレーションプログラムを利用している。第3のプログラムは、堰高さの組み合わせを選択するプログラムである。
【0021】
図2に示すように、演算処理装置2は、処理ブロック2Aにおいて、データ入力装置1から入力した初期値データの中で堰高さの初期値(h1,h2,…,hN)に対して、複数個の堰高さの変動パターンを仮定して、
例えば、パターン1:(h1(1),h2(1),…,hN(1)),パターン2:(h1(2),h2(2),…,hN(2)),…,パターンM:(h1(M),h2(M),…,hN(M))のように、設定する。
【0022】
次に、処理ブロック2Bは、重合度計算シミュレータの流体解析プログラムを用いて、処理ブロック2Aで設定した複数の堰高さパターン1〜Mに対する重合槽6の内部の流動状態を計算する。
【0023】
次に、処理ブロック2Cは、処理ブロック2Bで求められた流動状態に対して、重合度計算シュミレータの化学反応シミュレーションプログラムを用いて、複数の堰高さパターン1〜Mに対する重合槽6の出口における重合度及び生産量を計算して、複数のパターン1〜Mに対する出口重合度と生産量の組合せ(P1,Q1;P1,Q2;…;PM,QM)を算出する。
【0024】
ここで、出口重合度として、例えば、100,110,120,130,140,150,160,170,180,190,200の11種類を、また、生産量として、例えば、80t/日,100t/日,120t/日の3種類が一般的な数値とすると、合計33パターンの出口重合度及び生産量となるため、これらの33パターンが得られるような堰高さのパターンを予め算出する。そして、算出された堰高さパターンは、記憶装置3に格納される。一般に、堰高さが上がると重合槽内の内部液量は増加する。また、生産量を固定した場合、ポリマー重合度は内部液量と比例関係にある。よって、本プログラムのアルゴリズムにより、与えられた生産量とポリマー重合度の双方を満足する堰高さ変動パターンは発見可能である。
【0025】
処理ブロック2Cは、データ入力装置1から入力された目標設置値を達成する堰高さパターンを、記憶装置3に格納されている堰高さパターンから抽出する。抽出された堰高さパターンは、出力表示装置4に表示される。
【0026】
図3は、出力表示例を示している。図3に示す例では、所定の重合度及び生産量を得るための堰高さパターンとして、重合槽6の入口部6Aに最も近い側に位置するNo.1の堰高さを0.9mとし、順次出口側に近づくNo.2の堰高さを0.75mとし、No.3の堰高さを0.75mとし、No.4の堰高さを0.6mとし、No.5の堰高さを0.6mとする堰高さパターンが抽出されたことを示している。また、演算処理装置2は、目的とする重合度及び生産量である目標設定値を達成するための、堰9A,…,9Eの高さH1,…,H5の組合せを、堰高さ制御装置5に出力する。堰高さ制御装置5は、この堰9A,…,9Eの高さH1,…,H5の組合せに基づいて、堰駆動装置11に制御指令を出力し、堰9A,…,9Eの高さH1,…,H5を制御することで、目標とする重合度及び生産量のポリマーを製造することができる。
【0027】
以上説明したように、本実施形態によれば、堰高さを制御することで、広範囲の重合度または生産量に対応した、重合槽の運転制御が可能となる。なお、前述した33のパターンとは、1種類のポリマー製品に対するものであり、他のポリマー製品種別に対しても、それぞれの堰高さパターンを用意することで、複数のポリマー製品種別にも対応することができる。
【図面の簡単な説明】
【0028】
【図1】本発明の一実施形態によるポリマー重合装置のシステム構成を示すブロック図である。
【図2】本発明の一実施形態によるポリマー重合装置の演算処理装置における処理内容を機能ブロック図である。
【図3】本発明の一実施形態によるポリマー重合装置の演算処理装置における処理結果の説明図である。
【符号の説明】
【0029】
1…データ入力装置
2…演算処理装置
3…記憶装置
4…出力表示装置
5…堰高さ制御装置
6…重合槽
7…攪拌翼
8…ポリマー
9…堰
10…シール材
11…堰駆動装置
【特許請求の範囲】
【請求項1】
原料を重合反応させる重合槽を用いてポリマーを製造するポリマー重合装置であって、
前記重合槽の内部に設けられるとともに、その高さを可変できる複数の堰と、
これらの複数の堰の高さをそれぞれ制御する堰高さ制御手段を備えることを特徴とするポリマー重合装置。
【請求項2】
請求項1記載のポリマー重合装置において、
前記重合槽の形状に関する形状データと、前記重合槽を運転する時の条件である運転条件と、重合時の初期条件と、前記複数の堰のそれぞれの高さに関する複数のパターンに基づいて、前記重合槽の出口のポリマー重合度を重合度計算シミュレータを用いて演算し、
重合によって生成されるポリマーの重合度及び生産量に関する目標値に対して、この目標値を達成する前記複数の堰のそれぞれの高さを抽出する演算処理手段を備え、
この演算処理手段によって抽出された堰高さに基づいて、前記堰高さ制御手段により、前記複数の堰の高さを制御して、ポリマーを生成することを特徴とするポリマー重合装置。
【請求項1】
原料を重合反応させる重合槽を用いてポリマーを製造するポリマー重合装置であって、
前記重合槽の内部に設けられるとともに、その高さを可変できる複数の堰と、
これらの複数の堰の高さをそれぞれ制御する堰高さ制御手段を備えることを特徴とするポリマー重合装置。
【請求項2】
請求項1記載のポリマー重合装置において、
前記重合槽の形状に関する形状データと、前記重合槽を運転する時の条件である運転条件と、重合時の初期条件と、前記複数の堰のそれぞれの高さに関する複数のパターンに基づいて、前記重合槽の出口のポリマー重合度を重合度計算シミュレータを用いて演算し、
重合によって生成されるポリマーの重合度及び生産量に関する目標値に対して、この目標値を達成する前記複数の堰のそれぞれの高さを抽出する演算処理手段を備え、
この演算処理手段によって抽出された堰高さに基づいて、前記堰高さ制御手段により、前記複数の堰の高さを制御して、ポリマーを生成することを特徴とするポリマー重合装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2007−191657(P2007−191657A)
【公開日】平成19年8月2日(2007.8.2)
【国際特許分類】
【出願番号】特願2006−13480(P2006−13480)
【出願日】平成18年1月23日(2006.1.23)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成19年8月2日(2007.8.2)
【国際特許分類】
【出願日】平成18年1月23日(2006.1.23)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]