
ポンプユニット、呼吸補助装置
【課題】ポンプユニットにおいて、能力を向上させながらも、大幅な小型化を達成する。
【解決手段】マイクロポンプ500を行と列の関係となる格子状に配置し、少なくとも最下流行のマイクロポンプ500の吐出口を統合吐出口に接続する。更に、中間行の複数のマイクロポンプのそれぞれの吐出口を統合吐出口に直結させる吐出直結機構と、同マイクロポンプのそれぞれの吸入口を、最初に供給される前記流体に直結させる吸入直結機構と、上流行のマイクロポンプの吐出口を、下流行の前記マイクロポンプの吸入口に直結させる直列結合機構と、これらを制御する制御装置を備えるようにした。
【解決手段】マイクロポンプ500を行と列の関係となる格子状に配置し、少なくとも最下流行のマイクロポンプ500の吐出口を統合吐出口に接続する。更に、中間行の複数のマイクロポンプのそれぞれの吐出口を統合吐出口に直結させる吐出直結機構と、同マイクロポンプのそれぞれの吸入口を、最初に供給される前記流体に直結させる吸入直結機構と、上流行のマイクロポンプの吐出口を、下流行の前記マイクロポンプの吸入口に直結させる直列結合機構と、これらを制御する制御装置を備えるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マイクロポンプを利用して流体を搬送するポンプユニット、及びこのポンプユニットを用いた呼吸補助装置に関する。
【背景技術】
【0002】
医療現場では人工呼吸器など呼吸補助装置が用いられる。この呼吸補助装置の種類には、自発呼吸のない患者(全身麻酔、心肺蘇生中、重篤な患者)に用いる調節換気(Controlled Ventilation)方式や、患者の自発呼吸に合わせて気道に陽圧を作り出す補助換気方式(Assisted Ventilation)方式、補助換気と調節換気を組み合わせた部分的補助換気(Assist/Control)方式、気道の供給する気体を5〜40Hzの頻度で振動させて、1〜2ml/kgの非常に少ない1回換気量を実現する高頻度振動換気(high frequency occilation)などが採用される。
【0003】
なお、この呼吸補助装置は、睡眠時の呼吸障害の患者にも利用される。この呼吸障害は、睡眠中に気道の筋肉が弛緩して舌根部や軟口蓋が下がり、気道を閉塞することによって生じる。この種の呼吸障害の患者に対しても、気道に正圧を印加することで、その症状が緩和する。
【0004】
いずれの呼吸補助装置においても、気道に陽圧を作り出すためのポンプユニットが必要となる。このポンプユニットの動力源には、ファンを回転させて気体を搬送するブロアや、ピストンを往復運動させて気体を搬送するシリンダポンプなどが使用される。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の呼吸補助装置では、このポンプユニットが比較的大きいことから、これを箱状の筐体に収容して使用者の脇に設置して用いる。従って、呼吸補助装置のコンパクト化が難しいという問題があった。
【0006】
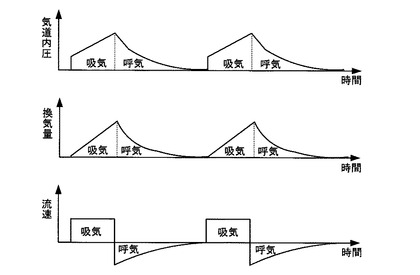
また、呼吸補助装置で用いるポンプユニットは、例えば図18に示されるように、吸気動作時は、最初は高い流量で素早く昇圧(陽圧化)し、その後、更に圧力を高めて吸気をアシストしながら流量を一定に維持する。呼気動作時は、高い流量で素早く減圧(負圧化)し、圧力が低下したら流量を次第に低下させて肺に負担をかけないように制御する。この制御は一例であり、実際には様々制御モードが要求されるが、この種の細かい制御を行う為には、大きめのブロアやシリンダポンプを利用して、圧力と流量を自在に変更できるようにしなければならない。従って、ポンプユニットの小型化が益々難しいという問題があった。
【0007】
本発明は上記問題点に鑑みてなされたものであり、圧力や流量を自在に制御可能としながらも、大幅な小型化を実現できるポンプユニット及びこのポンプユニットを用いた呼吸補助装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明者の鋭意研究により、上記目的は以下の手段によって達成される。
【0009】
即ち、上記目的を達成する本手段は、行と列の関係となる格子状に配置され、前記列に沿った方向に流体を搬送する複数のマイクロポンプと、少なくとも最下流行の前記マイクロポンプの吐出口が直結されて、前記マイクロポンプによって搬送される前記流体が最終的に吐出される統合吐出口と、中間行の前記複数のマイクロポンプのそれぞれの吐出口を、前記統合吐出口に直結させる吐出直結機構と、中間行の前記複数のマイクロポンプのそれぞれの吸入口を、最初に供給される前記流体に直結させる吸入直結機構と、上流行の前記マイクロポンプの吐出口を、下流行の前記マイクロポンプの吸入口に直結させる直列結合機構と、前記吐出直結機構、前記吸入直結切替機構及び前記直列結合機構を制御する制御装置と、を備え、前記制御装置は、上流行の前記マイクロポンプの吐出口を下流行の前記マイクロポンプの吸入口に直結させて前記列方向の接続を構築し、前記複数のマイクロポンプを圧力優先搬送状態とする一方、複数行の前記マイクロポンプの吐出口を前記統合吐出口に直結すると共に、複数行に配置される前記マイクロポンプの吸入口を、最初に供給される前記流体に直結させることで、前記複数のマイクロポンプを流量優先搬送状態とすることを特徴とする、ポンプユニットである。
【0010】
上記発明において、上記目的を達成するポンプユニットは、前記圧力優先搬送状態において、上流行の前記マイクロポンプの駆動数に対して、下流行の前記マイクロポンプの駆動数が同じ又は小さいことを特徴とすることが好ましい。
【0011】
上記発明において、上記目的を達成するポンプユニットは、上流行の前記マイクロポンプの配置数に対して、下流行の前記マイクロポンプの配置数が同じ又は小さいことを特徴とすることが好ましい。
【0012】
上記発明において、上記目的を達成するポンプユニットの前記制御装置は、前記圧力優先搬送状態と前記流量優先搬送状態を同時に組み合わせると共に、前記圧力優先搬送状態によって相互接続される前記行の数と、前記流量優先搬送状態によって前記統合吐出口に直結される前記行の数の占有関係を切り換えることで、前記流体の搬送圧力及び搬送流量を段階的に切り換えること特徴とすることが好ましい。
【0013】
上記発明において、上記目的を達成するポンプユニットの前記吐出直結機構、前記吸入直結機構及び前記直列結合機構は、前記行に配置される複数の前記マイクロポンプの全体に対して、まとめて、接続関係を切り換えることを特徴とすることが好ましい。
【0014】
上記目的を達成する本手段は、複数のマイクロポンプが並列配置される並列ポンプユニットを複数段に備えており、上流側の前記並列ポンプユニットと下流側の前記並列ポンプユニットの間には、上流側の前記並列ポンプユニットの前記複数のマイクロポンプから吐出される流体が合流する吐出側合流空間と、下流側の前記並列ポンプユニットの前記複数のマイクロポンプに対して、流体を分岐させながら供給する吸入側分岐空間と、上流側の前記並列ポンプユニットの前記吐出側合流空間を、下流側の前記並列ポンプユニットの前記吸入側分岐空間に直結・遮断する直列結合弁と、上流側の前記並列ポンプユニットの前記吐出側合流空間を、流体が最終的に吐出される統合吐出口に直結・遮断する吐出直結弁と、下流側の前記並列ポンプユニットの前記吸入側分岐空間を、最初に供給される前記流体に直結・遮断する吸入直結弁と、が配置されることを特徴とする、ポンプユニットである。
【0015】
上記発明において、上記目的を達成するポンプユニットは、前記吐出直結弁、前記吸入直結弁及び前記直列結合弁を制御する制御装置を更に備え、前記制御装置は、前記直列結合弁を直結状態、前記吐出直結弁及び前記吸入直結弁を遮断状態として、上流側の前記並列ポンプユニットと下流側の前記並列ポンプユニットを直列接続する圧力優先搬送状態と、前記直列結合弁を遮断状態、前記吐出直結弁及び前記吸入直結弁を直結状態として、上流側及び下流側の前記並列ポンプユニットを並列接続する流量優先搬送状態と、を切り換えることを特徴とすることが好ましい。
【0016】
上記目的を達成する本手段は、呼気又は吸気の気体が通過する流路と、前記流路内に配置されて呼気又は吸気方向に加速用の気体を噴出するノズルと、前記流路の周囲に固定され、前記ノズルに対して前記加速用の気体を供給する上記発明のいずれかに記載のポンプユニットと、を備える事を特徴とする、呼吸補助装置である。
【発明の効果】
【0017】
本発明によれば、能力は維持しながらも、ポンプユニットを大幅に小型化することが可能になるという優れた効果を奏し得る。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態に係るポンプユニットの概念構成を示した図である。
【図2】(A)は同ポンプユニットで用いられるマイクロポンプの構成例を示す断面図であり、(B)は同マイクロポンプの圧力−流量線を示すグラフである。
【図3】同ポンプユニットで用いられる制御装置のハード構成を示すブロック図である。
【図4】同ポンプユニットで用いられる制御装置の機能構成を示すブロック図である。
【図5】同ポンプユニットの制御例を示す図である。
【図6】同ポンプユニットの制御例を示す図である。
【図7】同ポンプユニットの制御例を示す図である。
【図8】本発明の第2実施形態に係るポンプユニットの概念構成を示した図である。
【図9】同ポンプユニットの制御例を示す図である。
【図10】同ポンプユニットの制御例を示す図である。
【図11】同ポンプユニットで選択可能な直列数及び並列数を示すグラフである。
【図12】同ポンプユニットの他の構成例を示す図である。
【図13】同ポンプユニットの他の構成例を示す図である。
【図14】(A)は本発明の第3実施形態に係る呼吸補助装置の構成を示す正面断面図、(B)は(A)におけるB−B矢視断面図である。
【図15】同呼吸補助装置の制御例を示す断面図である。
【図16】同呼吸補助装置の他の構成例を示す断面図である。
【図17】同呼吸補助装置の他の構成例を示す断面図である。
【図18】一般的な呼吸補助装置における圧力及び流量の制御例を示すグラフである。
【発明を実施するための形態】
【0019】
以下、図面を参照しながら本発明の実施形態の例について詳細に説明する。
【0020】
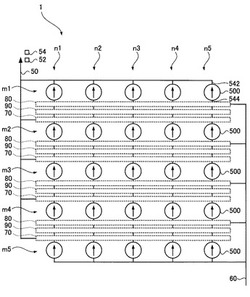
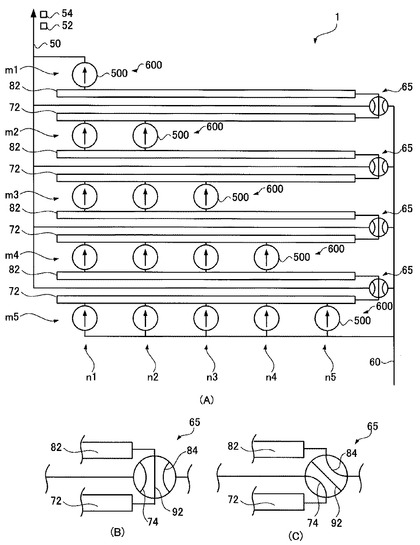
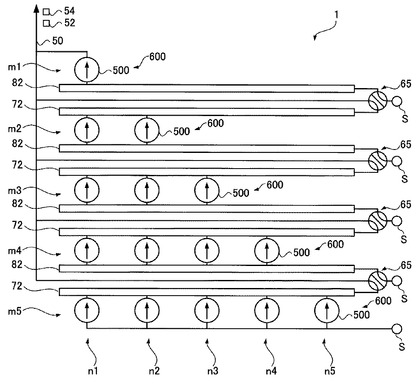
図1には、本発明の第1実施形態に係るポンプユニット1の概念構成が例示されている。このポンプユニット1は、m1〜m5行とn1〜n5列となる概念的には格子状に、複数(ここでは25個)のマイクロポンプ500が配置されている。マイクロポンプ500は、n1〜n5列に沿った方向に流体を搬送する。
【0021】
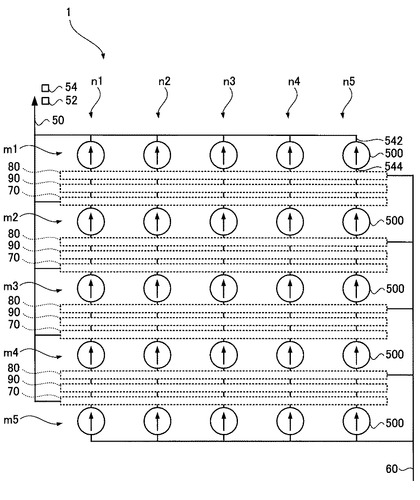
まず先に、マイクロポンプ500の構造例を図2(A)を参照して説明する。このマイクロポンプ500は、特許文献WO2008/069266で提案されているものであり、圧電素子501をダイヤフラム502に固定し、ダイヤフラム502に対向するように振動壁520を配置して一次ブロア室520Aを形成する。なお、この振動壁520には、一次ブロア室520Aの内外で流体を移動させる開口522を形成する。更に、一次ブロア室520Aの外側には、開口522と連続させて二次ブロア室540を配置する。この二次ブロア室540には、開口522と対向する位置に吐出口542を配置し、更に二次ブロア室540の周囲と連続するようにして吸入口544を配置する。圧電素子501によってダイヤフラム502を振動すると、二次ブロア室540と一次ブロア室520Aの間で流体が移動し、この流体抵抗によって振動壁520も共振する。このダイヤフラム502と振動壁520の共振によって、吸入口544から流体が吸い込まれて、吐出口542から流体が放出される。このマイクロポンプ500は、気体を搬送するブロア用途に適しており、逆止弁を用いることなく搬送できる。なお、このマイクロポンプ500は、外径が20mm×20mm×2mm程度の箱形状であって極めて小さいものの、入力正弦波を15Vpp(Volt peak to peak)で26kHzとした場合で、最大約1L/分(静圧0Pa時)の空気を搬送でき、また最大静圧2kPa(流量0L/分)を得ることが出来る。一方、このマイクロポンプ500は、圧電素子501によるダイヤフラム502の振動で流体を搬送することから、搬送可能な流体の体積に自ずと限界があり、この静圧/流量特性も図2(B)に示すような直線を示す。従って、例えば約1kPaの静圧を得ようとすると、流量は0.5L/分となる。なお、入力正弦波のVppを10や20に変化させれば、圧電素子501の振幅が変化するので、流量及び圧力を変化させることができる。すなわち、入力正弦波のVppを滑らかに変化させた場合には、流量及び圧力を滑らかに変化させることができる。あるいは、入力正弦波の周波数を変化させれば、流量及び圧力を変化させることができる。すなわち、入力正弦波の周波数を滑らかに変化させた場合には、流量及び圧力を滑らかに変化させることができる。ただし、流量及び圧力には、圧電素子の能力や部材の強度や耐久性によって上限がある。通常は定格のVpp及び周波数で使用される。
【0022】
なお、ここでは1つの圧電素子をダイヤフラムに貼り付けたモノモルフ(ユニモフル)構造を紹介しているが、勿論、2つの圧電素子を貼り合わせて振動量を増やすバイモフル構造を採用することもできる。なお、マイクロポンプ500の構造は、液体の搬送に適した構造など、他にも様々に存在する。従って本発明では、その目的に応じて最適な構造を採用すれば良い。すなわち、本実施形態におけるマイクロポンプ500は、逆止弁を用いることなく気体を搬送できるが、そのマイクロポンプ500に代えて、吐出口又は吸入口に逆止弁を備えるマイクロポンプを適用しても良い。
【0023】
図1に戻って、このポンプユニット1は、統合吐出口50と統合吸入口60を備える。統合吐出口50は、全てのマイクロポンプ500によって搬送される流体が最終的に吐出される部位となる。この統合吐出口50には、少なくとも最下流のm1行に属しているマイクロポンプ500の吐出口542が直結される。また、統合吐出口50に近辺には、ここから吐出される流体の流量を計測する流量センサ52と、同流体の圧力を検出する圧力センサ54が設置されている。統合吸入口60は、全てのマイクロポンプ500によって搬送される流体が最初に供給される部位となる。この統合吸入口60には、少なくとも最上流のm5行に属しているマイクロポンプ500の吸入口544が直結される。
【0024】
ポンプユニット1は、吐出直結機構70、吸入直結機構80、直列結合機構90を備える。吐出直結機構70は、少なくとも中間に位置するm2〜m4行に属するマイクロポンプ500のそれぞれの吐出口542を、統合吐出口50に直結させる。特に本実施形態では、最上流のm5行に属するマイクロポンプ500のそれぞれの吐出口542も統合吐出口50に直結可能としている。吸入直結機構80は、少なくとも中間に位置するm2〜m4行に属するマイクロポンプ500のそれぞれの吸入口544を、統合吸入口60に直結させる。特に本実施形態では、最下流のm1行に属するマイクロポンプ500のそれぞれの吸入口544も統合吐出口60に直結可能としている。
【0025】
直列結合機構90は、列方向(図面における上下方向)に隣接する一対のマイクロポンプ500間で、上流行のマイクロポンプ500の吐出口542を、下流行のマイクロポンプ500の吸入口544に直結させる。
【0026】
本実施形態のポンプユニット1では、これらの吐出直結機構70、吸入直結機構80及び直列結合機構90が、行を単位として、各行に配置される複数のマイクロポンプ500の全体の接続関係をまとめて切り換える。即ち、吐出直結機構70、吸入直結機構80及び直列結合機構90は、m1行とm2行の間、m2行とm3行の間、m3行とm4行の間、m4行とm5行の間にそれぞれ1つずつ配置される。各行間に配置される吐出直結機構70は、対応する行に属している全てのマイクロポンプ500の吐出口542を、まとめて統合吐出口50に直結する。各行間に配置される吸入直結機構80は、対応する行に属している全てのマイクロポンプ500の吸入口544を、まとめて統合吸入口60に直結する。各行間に配置される直列結合機構90は、上流行に属している全てのマイクロポンプ500の吐出口542を、まとめて、下流行に属しているマイクロポンプ500の吸入口544に直結する。このようにすると、弁構造及び弁制御が簡潔化される。なお、構造は複雑化するものの、行単位ではなく、マイクロポンプ500の1つずつに、吐出直結機構70、吸入直結機構80及び直列結合機構90を配置しても良く、更に高精度な制御が可能となる。
【0027】
図3には、このポンプユニット1が備える制御装置10が示されている。この制御装置10は、ハード構成としてCPU12、第1記憶媒体14、第2記憶媒体16、第3記憶媒体18、入力装置20、表示装置22、入出力インタフェース24、バス26を備えて構成される。CPU12はいわゆる中央演算処理装置であり、各種プログラムが実行されて本制御装置10の各種機能を実現する。第1記憶媒体14はいわゆるRAM(ランダム・アクセス・メモリ)であり、CPU12の作業領域として使用されるメモリである。第2記憶媒体16はいわゆるROM(リード・オンリー・メモリ)であり、CPU12で実行される基本OSを記憶するためのメモリである。第3記憶媒体18は、磁気ディスクを内蔵したハードディスク装置、CDやDVDやBDを収容するディスク装置、不揮発性の半導体フラッシュメモリ装置などで構成されており、CPU12で実行される各種プログラム、流量センサ52及び圧力センサ54のセンシングデータ等が保存される。入力装置20は入力キーやキーボード、マウスであり、各種情報を入力する装置である。表示装置22はディスプレイであって、各種動作状態を表示する。入出力インタフェース24は、吐出直結機構70、吸入直結機構80及び直列結合機構90を動作させる電源及び制御信号や、流量センサ52及び圧力センサ54のセンシング信号、各マイクロポンプ500を動作させる電源(正弦波の波形)及び制御信号が入出力される。更にこの入出力インタフェース24は、外部のパーソナルコンピュータからプログラム等のデータを取得したり、同パーソナルコンピュータに対して計測結果を出力したりすることもできる。バス26は、CPU12、第1記憶媒体14、第2記憶媒体16、第3記憶媒体18、入力装置20、表示装置22、入出力インタフェース24などを一体的に接続して通信を行うための配線となる。
【0028】
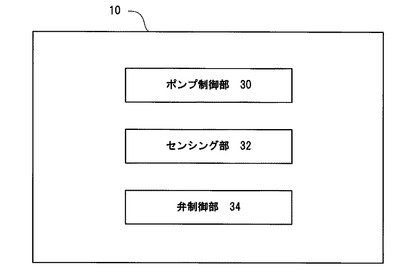
図4には、この制御装置10に保存される制御プログラムがCPU12で実行されることで得られる機能構成が示されている。この制御装置10は、機能構成として、ポンプ制御部30、センシング部32、弁制御部34を備える。ポンプ制御部30は、マイクロポンプ500への入力正弦波のVpp及び周波数を制御する。センシング部32は、流量センサ52及び圧力センサ54のセンシング信号を常に取得してポンプ制御部30及び弁制御部34に伝達する。弁制御部34は、センシング部32のセンシング信号を参照して、吐出直結機構70、吸入直結機構80及び直列結合機構90を適宜切り換え、目標となる流量値及び圧力値に近づくように制御する。
【0029】
この制御装置10によるポンプユニット1の制御例を図5に示す。
【0030】
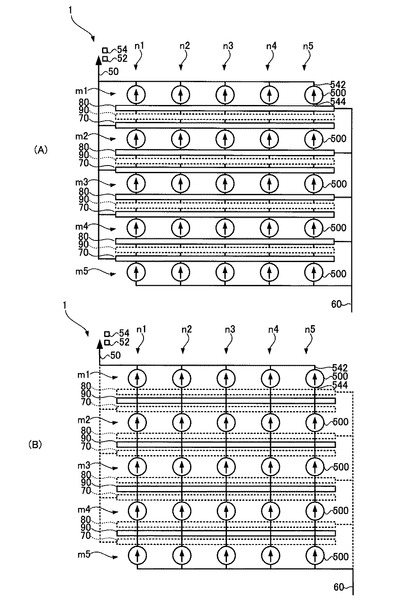
図5(A)には、ポンプユニット1において、全ての吐出直結機構70及び吸入直結機構80をON、全ての直列結合機構90をOFFにして、m1〜m5行のマイクロポンプ500の吐出口542を統合吐出口50に直結すると共に、m1〜m5行のマイクロポンプ500の吸入口544を統合吸入口60に直結する。このようにすると、25個のマイクロポンプ500が並列接続されるので、全ての行が、流量を優先とした搬送状態(ここでは流量優先搬送状態と呼ぶ)になる。結果、マイクロポンプ500単体と比較して、25倍の流量を得ることが出来る。
【0031】
図5(B)には、ポンプユニット1において、全ての吐出直結機構70及び吸入直結機構80をOFF、全ての直列結合機構90をONにして、上流行のマイクロポンプ500の吐出口542を、下流行のマイクロポンプ500の吸入口544に直結する。このようにすると、n1〜n5列方向にそって5段のマイクロポンプ500が直列接続される状態となり、全ての行が、圧力を優先とした搬送状態(ここでは圧力優先搬送状態と呼ぶ)になる。結果、下流側に進むにつれて流体の圧力が上昇し、出口側では約5倍の圧力を得ることが出来る。また、流量に関しては、m1〜m5行で5つのマイクロポンプ500が並列稼働している結果、単純に5個のマイクロポンプ500を直列接続した場合と比較して、約5倍の流量を得ることが出来る。
【0032】
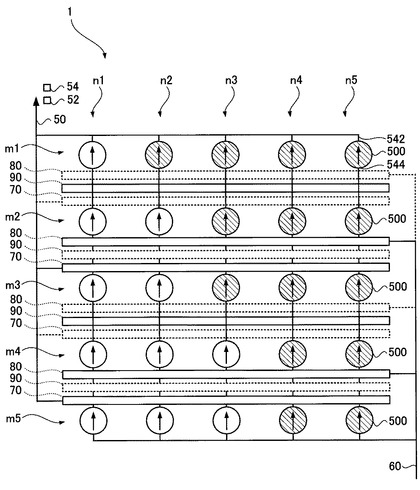
図5(A)の流量優先搬送状態では、全てのマイクロポンプ500を稼働させる場合を例示したが、例えば図6(A)に示されるように、各行のマイクロポンプ500の駆動数を減少させて、流量を制御することが好ましい。なお、図6では、停止中のマイクロポンプ500は斜線を付記している。このようにすると、マイクロポンプ500単体の流量を仮に1とすれば、1〜25の範囲で流量を変化させることができる。
【0033】
また図5(B)の圧力優先搬送状態では、全てのマイクロポンプ500を稼働させる場合を例示したが、例えば図6(B)に示されるように、上流行のマイクロポンプ500の駆動数に対して、下流行のマイクロポンプ500の駆動数が同じ又は小さくなるように制御することが好ましい。なぜなら、例えば気体を搬送する場合、m5行からm1行に向かって気圧が上昇するにつれて、ボイルの法則によって体積が減少する。従って、各行の全てのマイクロポンプ500を駆動させなくても、十分に流量を確保できるからである。例えば、同図で示されるように、m5行では5個のマイクロポンプ500を稼働させ、m4行では4個のマイクロポンプ500を稼働させ、m3行では3個のマイクロポンプ500を稼働させ、m2行では2個のマイクロポンプ500を稼働させ、m1行では1個のマイクロポンプ500を稼働させる。各行で静圧1kPaずつ昇圧させていくと、統合吐出口50では静圧5kPaとなり、その体積(流量)も5分の1程度になる。結果、m1行における流量は、1つのマイクロポンプ500の最大許容流量の範囲内になることから、1つのマイクロポンプ500を稼働させることで、図5(B)と同じ流量を得ることが出来る。即ち、図5(B)と図6(B)では、同じ出力を得ることができるので、エネルギー効率の観点からすると、図6(B)の方が好ましい。なお、図6(B)では、上流行から下流行に移動するにつれて、マイクロポンプ500の稼働数が必ず減少する場合を例示しているが、本発明はこれに限定されず、少なくともいずれかの上流行と下流行の関係で稼働数が減少していれば、全ての行で減少させる必要は無い。
【0034】
更に、図7に示されるように、流量優先搬送状態と圧力優先搬送状態を混在させることも好ましい。ここでは、m1行とm2行の間において圧力優先搬送状態、m2行とm3行の間において流量優先搬送状態、m3行とm4行の間において圧力優先搬送状態、m4行とm5行の間において流量優先搬送状態としている。また、各行のマイクロポンプ500の稼働数も適宜制御している。このように、圧力優先搬送状態によって相互接続される一対の行の数と、流量優先搬送状態によって統合吐出口50に直結される行の数の占有関係を切り換えることで、流体の搬送圧力及び搬送流量を段階的に切り換える。結果、マイクロポンプ500の稼働数を含めた多様な組合せによって、最適な流量と圧力を決定できる。
【0035】
図8(A)には、第2実施形態に係るポンプユニット1の構成が例示されている。なお、第1実施形態と第2実施形態は、同一又は類似する部分が多いので、これらの説明は省略すると共に、ここでは第1実施形態と異なる点を中心に説明する。
【0036】
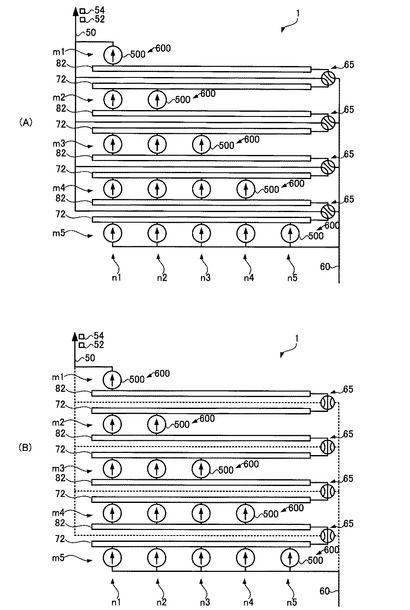
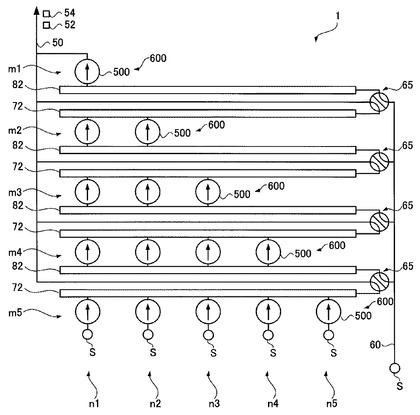
このポンプユニット1は、第1実施形態と同様に、m1〜m5行とn1〜n5列となる概念的には格子状にマイクロポンプ500が配置されているが、上流行側のマイクロポンプ500の配置数に対して、下流行のマイクロポンプ500の配置数が同じ又は小さく設定されている。具体的には、m5行では5個のマイクロポンプ500が並列配置され、m4行では4個のマイクロポンプ500が並列配置され、m3行では3個のマイクロポンプ500が並列配置され、m2行では2個のマイクロポンプ500が並列配置され、m1行では1個のマイクロポンプ500が配置される。なお、上流行から下流行に移動するにつれて、マイクロポンプ500の配置数が必ず減少する場合を例示しているが、本発明はこれに限定されるものではない。
【0037】
本第2実施形態では、この各行に並列配置されるマイクロポンプ500を、まとめて並列ポンプユニット600を呼ぶ。従って、このポンプユニット1は、並列ポンプユニット600を、m1〜m5行の5段に備えていることになる。更に、このポンプユニット1は、図8(B)(C)に拡大して示されるように、上流側の並列ポンプユニット600と下流側の並列ポンプユニット600の間において、吐出側合流空間72と、吐出直結弁74と、吸入側分岐空間82と、吸入直結弁84と、直列結合弁92を備える。なお、吐出直結弁74、吸入直結弁84及び直列結合弁92は、一つの切替弁65を回転させることでまとめて動作する。なお、切替弁65は、回転タイプのものに限定されず、電磁弁等を用いるタイプのものであってもよい。
【0038】
吐出側合流空間72は、上流側の並列ポンプユニット600の複数のマイクロポンプ500から吐出される流体がまとめて合流するチャンバ空間となる。吐出直結弁74は、図8(C)に示されるように、この吐出側合流空間72を、流体が最終的に吐出される統合吐出口50に直結したり遮断したりする弁である。
【0039】
吸入側分岐空間82は、下流側の並列ポンプユニット600の複数のマイクロポンプ500に対して、流体を分岐させながら供給する空間となっている。即ち、これらの複数のマイクロポンプ500の吸入口544がまとめて接続されるチャンバ空間となる。吸入直結弁84は、図8(C)に示されるように、この吸入側分岐空間82を、流体が最初に供給される統合吸入口60に直結したり遮断したりする弁である。
【0040】
直列結合弁92は、図8(B)に示されるように、上流側の吐出側合流空間72を、下流側の吸入側分岐空間82に直結したり遮断したりする弁である。
【0041】
従って、第1実施形態の吐出直結機構70、吸入直結機構80、直列結合機構90に対応させると、吐出側合流空間72と吐出直結弁74が吐出直結機構70となり、吸入側分岐空間82と吸入直結弁84が吸入直結機構80となり、吐出側合流空間72と吸入側分岐空間82と直列結合弁92が直列結合機構90となる。
【0042】
本第2実施形態のポンプユニット1では、吐出側合流空間72と吸入側分岐空間82と切替弁65によって、並列ポンプユニット600を単位として、各並列ポンプユニット600に属するマイクロポンプ500の全体の接続関係をまとめて切り換える。
【0043】
図9には、図1と同じ制御装置10によって、第2実施形態のポンプユニット1の制御例が示されている。
【0044】
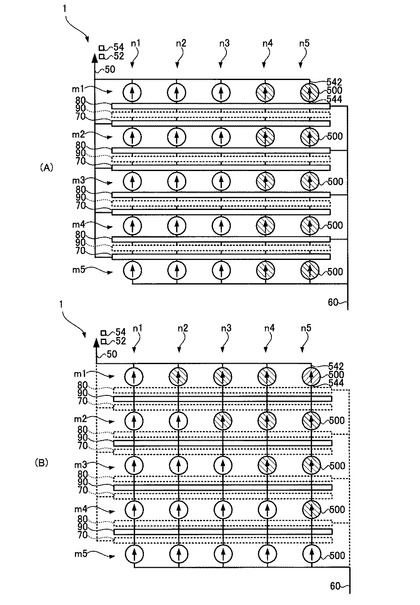
図9(A)には、全ての直列結合弁92を遮断状態(OFF)、全ての吐出直結弁74及び吸入直結弁84を直結状態(ON)として、上流側及び下流側の全ての並列ポンプユニット600を更に並列接続とする。即ち、全てのマイクロポンプ500の吐出口542が統合吐出口50に直結されると共に、全てのマイクロポンプ500の吸入口544が統合吸入口60に直結される。このようにすると、15個のマイクロポンプ500が並列接続されるので、流量優先搬送状態になる。結果、マイクロポンプ500単体と比較して、15倍の流量を得ることが出来る。
【0045】
図9(B)には、全ての直列結合弁92を直結状態、全ての吐出直結弁74及び吸入直結弁84を遮断状態として、上流側の並列ポンプユニット600と下流側の並列ポンプユニット600を全て直列接続とする。結果、5段の並列ポンプユニット600が直列接続された圧力優先搬送状態となる。特に、流路の途中に配置される吐出側合流空間72と吸入側分岐空間82によって、各マイクロポンプ500に供給される流体、及び吐出される流体の圧力が均等化されるので、各マイクロポンプ500に均等な負荷をかけることができ、搬送効率を高めることが出来る。
【0046】
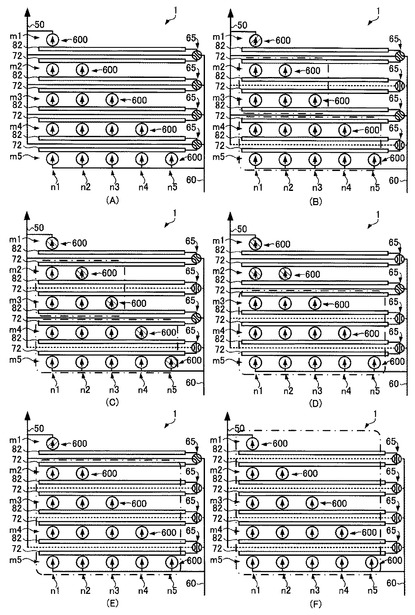
図10には、このポンプユニット1を用いて、高流量状態から高圧力状態に段階に切り替えていく制御例が示されている。まず、図10(A)に示されるように、全ての吐出側合流空間72、吸入側分岐空間82及び切替弁65を流量優先搬送状態として、15個のマイクロポンプ500を並列状態にして、1倍の圧力且つ15倍の流量を得る。
【0047】
次いで、図10(B)に示されるように、m2行とm3行の並列ポンプユニット600の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えると共に、m4行とm5行の並列ポンプユニット600の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換える。結果、これらの並列ポンプユニット500により2段階の直列接続が実現されて2倍の圧力を得ることが出来る。また、m2行及びm4行の並列ポンプユニット600による合計6つのマイクロポンプ500による6倍の流量を得る。この際、m1行の並列ポンプユニット600は休止させている。
【0048】
更に図10(C)に示されるように、図10(B)と同じ接続状態で、m2行からm5行の各並列ポンプユニット600において、1つのマイクロポンプ500を休止させて、同じ2倍の圧力を維持しながらも、合計4つの並列マイクロポンプによる4倍の流量を得る。なお、ここではマイクロポンプ500を休止させて流量を減少させる場合を示しているが、例えば、m1行とm2行の間、及びm3行とm4行の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えても、同じ状況となる。
【0049】
次いで図10(D)に示されるように、m3行とm4行の間及びm4行とm5行の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えることで、3段階の直列接続を実現して3倍の圧力を得ると同時に、m3行の並列ポンプユニット600の3つのマイクロポンプ500による3倍の流量を得る。この際、m1行とm2行の並列ポンプユニット600は休止させている。
【0050】
その後、図10(E)に示されるように、m2行とm3行の間、m3行とm4行の間及びm4行とm5行の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えることで、4段階の直列接続を実現して4倍の圧力を得ると同時に、m2行の並列ポンプユニット600の2つのマイクロポンプ500による2倍の流量を得る。この際、m1行の並列ポンプユニット600は休止させている。
【0051】
最後に、図10(F)に示されるように、全ての吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えることで、5段階の直列接続を実現して5倍の圧力を得ると同時に、m1行の並列ポンプユニット600の1つのマイクロポンプ500による1倍の流量を得る。この際、各並列ポンプユニット600の全てのマイクロポンプ500は動かしている。
【0052】
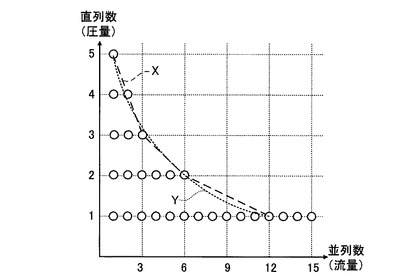
このように制御を行うと、例えば図11に示されるようなバリエーションの直列段数と並列数を選択することが可能となる。従って、並列数と直列数の占有関係を段階的に切り換えれば、流量と圧量の関係を滑らかに切り換えることが可能になる。例えば点線Xに示されるように、高圧搬送と高流量搬送の間を滑らかに移行するような制御を実現することが可能となる。加えて、入力正弦波のVpp又は周波数を滑らかに変化させることで、流量と圧量の関係を更に滑らかに変化させることが可能になる。例えば点線Yに示されるように、高圧搬送と高流量搬送の間を更に滑らかに移行するような制御を実現することが可能となる。
【0053】
以上、これらの実施形態のポンプユニット1によれば、マイクロポンプ500が格子状に配置されており、吐出直結機構70、吸入直結機構80及び直列結合機構90によって、各マイクロポンプ500の直列接続と並列接続を、合理的に組み合わせて制御することが可能となる。結果、マイクロポンプ500単体では流量及び静圧が不足する用途であっても、複数のマイクロポンプ500を組み合わせて利用できるので、従来のブロアやシリンジポンプと同様に用いることができる。また、各マイクロポンプ500は小さいので、これを複数配置しても、従来のブロア等と比較して小さく且つ軽量に構成できる。特に、並列数と直列数の組合せとなる多様なバリエーションを、各マイクロポンプ500のON/OFFや、吐出直結機構70、吸入直結機構80及び直列結合機構90のON/OFFによってデジタル的に制御することが可能となるので、制御構成も極めて簡潔にすることができる。また更に、従来のブロアやシリンジポンプの場合、それら1つが故障すると、全体の流体の搬送が滞ることになるが、本実施形態のポンプユニット1によれば、個々のマイクロポンプ500が故障しても、他のマイクロポンプ500で補うことが出来るので、安全性を高めることも可能となる。
【0054】
特に本実施形態のポンプユニット1では、マイクロポンプ500が直列接続される圧力優先搬送状態において、上流行に属するマイクロポンプ500の数よりも、下流行のマイクロポンプ500の数が同等又は小さくなっている。結果、無駄なマイクロポンプ500の動作が抑制されるので消費電力を低減させることが可能となり、例えばバッテリー駆動の用途に特に適している。
【0055】
また更に、本実施形態で示したポンプユニット1では、各行に配置される複数のマイクロポンプ500の全体(並列ポンプユニット600全体)に対して、まとめて接続関係を切り換える。結果、弁の構成が簡潔となり、メンテナンス性を向上させている。特に第2実施形態のように、一対の並列ポンプユニット600の間に、吐出側合流空間72と吸入側分岐空間82を配置しているので、装置構成が簡潔化される。例えば、上流から下流に向かって並列ポンプユニット600のマイクロポンプ数500を減少させていく場合にも、途中の吐出側合流空間72及び吸入側分岐空間82がバッファ空間となるので、複雑な配管構成が不要となる。また、各並列ポンプユニット600に属するマイクロポンプ500をON/OFFするだけで、個々の弁の開閉制御を行うことなく、単位並列ポンプユニット600内でのマイクロポンプ500の並列数を簡単に増減させることができるので、制御も簡単となる。また、並列ポンプユニット600内で搬送流体の圧力が均質化されるので、搬送効率を高めることにも繋がる。
【0056】
なお、本実施形態では、最初に流体が統合吸入口60に供給され、そこから分岐して各マイクロポンプ500の吸入口544に接続される場合を例示したが、本発明はこれに限定されない。
【0057】
例えば、気体を搬送するブロア用途の場合、図12に示されるように、各マイクロポンプ500の吸入口544又は吸入側分岐空間82を、個別に大気側Sに開放して、吸気を行うことも可能である。この場合、個別に二種類以上の気体について吸気を行えるので、例えば、m1行とm2行の間及びm2行とm3行の間の吸入側分岐空間82から第一の流体(例えば酸素)の吸気を行うと共に、m3行とm4行の間及びm4行とm5行の吸入側分岐空間82、並びにm5行の各マイクロポンプ500の吸入口544から第二の流体(例えば空気)の吸気を行うことも可能である。
【0058】
あるいは、図13に示されるように、最上流のm5行の各マイクロポンプ500の吸入口544を、統合吸入口60とは別に、個別に大気側Sに開放して、吸気を行うことも可能である。この場合、個別に二種類以上の気体について吸気を行えるので、例えば、統合吸入口60、及びm5行におけるn1〜n3列のマイクロポンプ500の吸入口544から第一の流体(例えば酸素)の吸気を行うと共に、m5行におけるn4、n5列のマイクロポンプ500の吸入口544から第二の流体(例えば空気)の吸気を行うことも可能である。これらの例では、第一及び第二の流体は混合されて、統合吐出口50から吐出される。
【0059】
また、本実施形態では、外観上においてもマイクロポンプ500が格子状に配置される場合を図示したが、これは説明上の便宜からそうしたものであり、流体が通過する経路面で本実施形態のような状態になっていれば良い。即ち、流体の経路構成上において格子状であれば良く、ハードレイアウト構成は自在に変更できることは言うまでもない。
【0060】
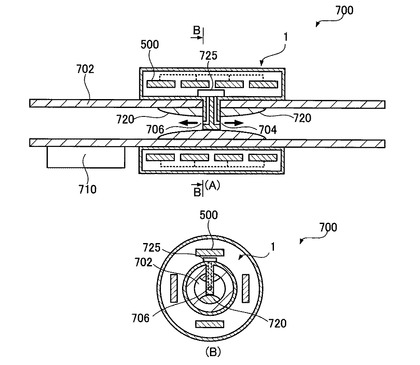
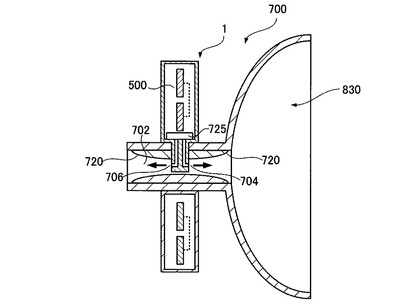
本発明の第3実施形態として、第2実施形態で説明したポンプユニット1を、医療用の呼吸補助装置700に適用した例を図14に示す。この呼吸補助装置700は、呼吸用の気体が通過する流路702と、この流路702内に配置されて、呼気方向及び吸気方向にそれぞれ加速用の空気を放出可能な呼気ノズル704及び吸気ノズル706と、流路702の外表面に周方向に沿って配置されるポンプユニット1と、このポンプユニット1を駆動するバッテリ710を備えて構成される。流路702内に配置される呼気及び吸気ノズル704、706の近傍には、それぞれ、ベンチュリー壁720が配置される。なお、バッテリ710については、離れた場所に配置したり、電源ラインを接続することで省略したりすることもできる。
【0061】
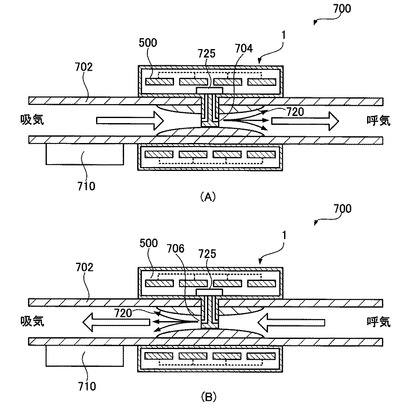
更にポンプユニット1内における統合吐出口(図示省略)には、呼吸切替弁725が配置される。この呼吸切替弁725は、統合吐出口から吐出される空気を、呼気ノズル704から放出させる場合と、吸気ノズル706から放出させる場合を切り換える。図15(A)に示されるように、呼気ノズル704から空気を放出させる場合は、この空気がベンチュリー壁720によって広がることで呼気側が負圧状態となり、吸気側(肺側)から排出される二酸化炭素を呼び込んで、呼気方向に流す。結果、呼気動作を補助することができる。一方、図15(B)に示されるように、吸気ノズル706から空気を放出させる場合は、この空気がベンチュリー壁720によって広がることで吸気側が負圧状態となり、吸気側から供給される酸素を吸い込んで呼気方向(肺側)に流れる。結果、吸気動作を補助することができる。
【0062】
この呼吸補助装置700によれば、流路702を構成する配管自体に、小型化されたポンプユニット1が直接固定されるので、呼吸補助装置700を極めてコンパクトに構成することが出来る。更に、流路702とポンプユニット1が一体化されるので、使用者の体の動作に連動して流路702が動いても、この流路702とポンプユニット1が一緒に動くので、呼気及び吸気ノズル704、706と、ポンプユニット1の接続が途切れないで済む。従って、呼吸補助動作の安定性が増すと同時に、使用者も体を動かしやすくなる。
【0063】
更に、ポンプユニット1から呼気及び吸気ノズル704、706までの距離が短くなるので、呼吸補助動作の応答性を高めることが出来る。
【0064】
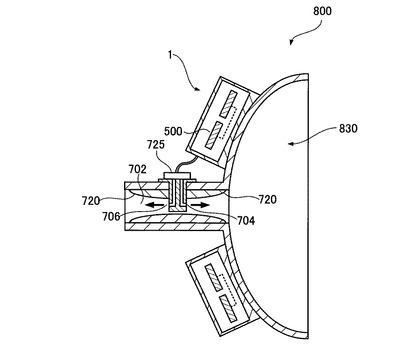
なお、この呼吸補助装置700は、使用者の口から気管に向かって挿入される挿管チューブと連続するようにして、用いることが可能であるが、例えば図16に示されるように、鼻マスク830に対して流路702を接続して用いることもできる。更に、鼻マスクに適用する場合は、例えば図17に示される呼吸補助装置800のように、鼻マスク830の外周面にポンプユニット1を直接固定することが好ましく、全体の安定性が増す。また、ここでは、1台のポンプユニット1を呼吸切替弁725で切り換えて、呼気ノズル又は吸気ノズルに供給する場合を例示したが、2台のポンプユニット1を用意して、それぞれ呼気ノズル、吸気ノズルに接続するようにしても良い。
【0065】
尚、本発明のポンプユニット及び呼吸補助装置は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【産業上の利用可能性】
【0066】
本発明のポンプユニットは、呼吸補助装置以外の様々な用途に用いることが出来る。また、本発明の呼吸補助装置は、様々な生物の呼吸補助目的で利用することができる。
【符号の説明】
【0067】
1 ポンプユニット
10 制御装置
50 統合吐出口
60 統合吸入口
65 切替弁
70 吐出直結機構
72 吐出側合流空間
74 吐出直結弁
80 吸入直結機構
82 吸入側分岐空間
84 吸入直結弁
90 直列結合機構
92 直列結合弁
500 マイクロポンプ
600 並列ポンプユニット
700、800 呼吸補助装置
702 流路
704 呼気ノズル
706 吸気ノズル
710 バッテリ
830 鼻マスク
【技術分野】
【0001】
本発明は、マイクロポンプを利用して流体を搬送するポンプユニット、及びこのポンプユニットを用いた呼吸補助装置に関する。
【背景技術】
【0002】
医療現場では人工呼吸器など呼吸補助装置が用いられる。この呼吸補助装置の種類には、自発呼吸のない患者(全身麻酔、心肺蘇生中、重篤な患者)に用いる調節換気(Controlled Ventilation)方式や、患者の自発呼吸に合わせて気道に陽圧を作り出す補助換気方式(Assisted Ventilation)方式、補助換気と調節換気を組み合わせた部分的補助換気(Assist/Control)方式、気道の供給する気体を5〜40Hzの頻度で振動させて、1〜2ml/kgの非常に少ない1回換気量を実現する高頻度振動換気(high frequency occilation)などが採用される。
【0003】
なお、この呼吸補助装置は、睡眠時の呼吸障害の患者にも利用される。この呼吸障害は、睡眠中に気道の筋肉が弛緩して舌根部や軟口蓋が下がり、気道を閉塞することによって生じる。この種の呼吸障害の患者に対しても、気道に正圧を印加することで、その症状が緩和する。
【0004】
いずれの呼吸補助装置においても、気道に陽圧を作り出すためのポンプユニットが必要となる。このポンプユニットの動力源には、ファンを回転させて気体を搬送するブロアや、ピストンを往復運動させて気体を搬送するシリンダポンプなどが使用される。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の呼吸補助装置では、このポンプユニットが比較的大きいことから、これを箱状の筐体に収容して使用者の脇に設置して用いる。従って、呼吸補助装置のコンパクト化が難しいという問題があった。
【0006】
また、呼吸補助装置で用いるポンプユニットは、例えば図18に示されるように、吸気動作時は、最初は高い流量で素早く昇圧(陽圧化)し、その後、更に圧力を高めて吸気をアシストしながら流量を一定に維持する。呼気動作時は、高い流量で素早く減圧(負圧化)し、圧力が低下したら流量を次第に低下させて肺に負担をかけないように制御する。この制御は一例であり、実際には様々制御モードが要求されるが、この種の細かい制御を行う為には、大きめのブロアやシリンダポンプを利用して、圧力と流量を自在に変更できるようにしなければならない。従って、ポンプユニットの小型化が益々難しいという問題があった。
【0007】
本発明は上記問題点に鑑みてなされたものであり、圧力や流量を自在に制御可能としながらも、大幅な小型化を実現できるポンプユニット及びこのポンプユニットを用いた呼吸補助装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明者の鋭意研究により、上記目的は以下の手段によって達成される。
【0009】
即ち、上記目的を達成する本手段は、行と列の関係となる格子状に配置され、前記列に沿った方向に流体を搬送する複数のマイクロポンプと、少なくとも最下流行の前記マイクロポンプの吐出口が直結されて、前記マイクロポンプによって搬送される前記流体が最終的に吐出される統合吐出口と、中間行の前記複数のマイクロポンプのそれぞれの吐出口を、前記統合吐出口に直結させる吐出直結機構と、中間行の前記複数のマイクロポンプのそれぞれの吸入口を、最初に供給される前記流体に直結させる吸入直結機構と、上流行の前記マイクロポンプの吐出口を、下流行の前記マイクロポンプの吸入口に直結させる直列結合機構と、前記吐出直結機構、前記吸入直結切替機構及び前記直列結合機構を制御する制御装置と、を備え、前記制御装置は、上流行の前記マイクロポンプの吐出口を下流行の前記マイクロポンプの吸入口に直結させて前記列方向の接続を構築し、前記複数のマイクロポンプを圧力優先搬送状態とする一方、複数行の前記マイクロポンプの吐出口を前記統合吐出口に直結すると共に、複数行に配置される前記マイクロポンプの吸入口を、最初に供給される前記流体に直結させることで、前記複数のマイクロポンプを流量優先搬送状態とすることを特徴とする、ポンプユニットである。
【0010】
上記発明において、上記目的を達成するポンプユニットは、前記圧力優先搬送状態において、上流行の前記マイクロポンプの駆動数に対して、下流行の前記マイクロポンプの駆動数が同じ又は小さいことを特徴とすることが好ましい。
【0011】
上記発明において、上記目的を達成するポンプユニットは、上流行の前記マイクロポンプの配置数に対して、下流行の前記マイクロポンプの配置数が同じ又は小さいことを特徴とすることが好ましい。
【0012】
上記発明において、上記目的を達成するポンプユニットの前記制御装置は、前記圧力優先搬送状態と前記流量優先搬送状態を同時に組み合わせると共に、前記圧力優先搬送状態によって相互接続される前記行の数と、前記流量優先搬送状態によって前記統合吐出口に直結される前記行の数の占有関係を切り換えることで、前記流体の搬送圧力及び搬送流量を段階的に切り換えること特徴とすることが好ましい。
【0013】
上記発明において、上記目的を達成するポンプユニットの前記吐出直結機構、前記吸入直結機構及び前記直列結合機構は、前記行に配置される複数の前記マイクロポンプの全体に対して、まとめて、接続関係を切り換えることを特徴とすることが好ましい。
【0014】
上記目的を達成する本手段は、複数のマイクロポンプが並列配置される並列ポンプユニットを複数段に備えており、上流側の前記並列ポンプユニットと下流側の前記並列ポンプユニットの間には、上流側の前記並列ポンプユニットの前記複数のマイクロポンプから吐出される流体が合流する吐出側合流空間と、下流側の前記並列ポンプユニットの前記複数のマイクロポンプに対して、流体を分岐させながら供給する吸入側分岐空間と、上流側の前記並列ポンプユニットの前記吐出側合流空間を、下流側の前記並列ポンプユニットの前記吸入側分岐空間に直結・遮断する直列結合弁と、上流側の前記並列ポンプユニットの前記吐出側合流空間を、流体が最終的に吐出される統合吐出口に直結・遮断する吐出直結弁と、下流側の前記並列ポンプユニットの前記吸入側分岐空間を、最初に供給される前記流体に直結・遮断する吸入直結弁と、が配置されることを特徴とする、ポンプユニットである。
【0015】
上記発明において、上記目的を達成するポンプユニットは、前記吐出直結弁、前記吸入直結弁及び前記直列結合弁を制御する制御装置を更に備え、前記制御装置は、前記直列結合弁を直結状態、前記吐出直結弁及び前記吸入直結弁を遮断状態として、上流側の前記並列ポンプユニットと下流側の前記並列ポンプユニットを直列接続する圧力優先搬送状態と、前記直列結合弁を遮断状態、前記吐出直結弁及び前記吸入直結弁を直結状態として、上流側及び下流側の前記並列ポンプユニットを並列接続する流量優先搬送状態と、を切り換えることを特徴とすることが好ましい。
【0016】
上記目的を達成する本手段は、呼気又は吸気の気体が通過する流路と、前記流路内に配置されて呼気又は吸気方向に加速用の気体を噴出するノズルと、前記流路の周囲に固定され、前記ノズルに対して前記加速用の気体を供給する上記発明のいずれかに記載のポンプユニットと、を備える事を特徴とする、呼吸補助装置である。
【発明の効果】
【0017】
本発明によれば、能力は維持しながらも、ポンプユニットを大幅に小型化することが可能になるという優れた効果を奏し得る。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態に係るポンプユニットの概念構成を示した図である。
【図2】(A)は同ポンプユニットで用いられるマイクロポンプの構成例を示す断面図であり、(B)は同マイクロポンプの圧力−流量線を示すグラフである。
【図3】同ポンプユニットで用いられる制御装置のハード構成を示すブロック図である。
【図4】同ポンプユニットで用いられる制御装置の機能構成を示すブロック図である。
【図5】同ポンプユニットの制御例を示す図である。
【図6】同ポンプユニットの制御例を示す図である。
【図7】同ポンプユニットの制御例を示す図である。
【図8】本発明の第2実施形態に係るポンプユニットの概念構成を示した図である。
【図9】同ポンプユニットの制御例を示す図である。
【図10】同ポンプユニットの制御例を示す図である。
【図11】同ポンプユニットで選択可能な直列数及び並列数を示すグラフである。
【図12】同ポンプユニットの他の構成例を示す図である。
【図13】同ポンプユニットの他の構成例を示す図である。
【図14】(A)は本発明の第3実施形態に係る呼吸補助装置の構成を示す正面断面図、(B)は(A)におけるB−B矢視断面図である。
【図15】同呼吸補助装置の制御例を示す断面図である。
【図16】同呼吸補助装置の他の構成例を示す断面図である。
【図17】同呼吸補助装置の他の構成例を示す断面図である。
【図18】一般的な呼吸補助装置における圧力及び流量の制御例を示すグラフである。
【発明を実施するための形態】
【0019】
以下、図面を参照しながら本発明の実施形態の例について詳細に説明する。
【0020】
図1には、本発明の第1実施形態に係るポンプユニット1の概念構成が例示されている。このポンプユニット1は、m1〜m5行とn1〜n5列となる概念的には格子状に、複数(ここでは25個)のマイクロポンプ500が配置されている。マイクロポンプ500は、n1〜n5列に沿った方向に流体を搬送する。
【0021】
まず先に、マイクロポンプ500の構造例を図2(A)を参照して説明する。このマイクロポンプ500は、特許文献WO2008/069266で提案されているものであり、圧電素子501をダイヤフラム502に固定し、ダイヤフラム502に対向するように振動壁520を配置して一次ブロア室520Aを形成する。なお、この振動壁520には、一次ブロア室520Aの内外で流体を移動させる開口522を形成する。更に、一次ブロア室520Aの外側には、開口522と連続させて二次ブロア室540を配置する。この二次ブロア室540には、開口522と対向する位置に吐出口542を配置し、更に二次ブロア室540の周囲と連続するようにして吸入口544を配置する。圧電素子501によってダイヤフラム502を振動すると、二次ブロア室540と一次ブロア室520Aの間で流体が移動し、この流体抵抗によって振動壁520も共振する。このダイヤフラム502と振動壁520の共振によって、吸入口544から流体が吸い込まれて、吐出口542から流体が放出される。このマイクロポンプ500は、気体を搬送するブロア用途に適しており、逆止弁を用いることなく搬送できる。なお、このマイクロポンプ500は、外径が20mm×20mm×2mm程度の箱形状であって極めて小さいものの、入力正弦波を15Vpp(Volt peak to peak)で26kHzとした場合で、最大約1L/分(静圧0Pa時)の空気を搬送でき、また最大静圧2kPa(流量0L/分)を得ることが出来る。一方、このマイクロポンプ500は、圧電素子501によるダイヤフラム502の振動で流体を搬送することから、搬送可能な流体の体積に自ずと限界があり、この静圧/流量特性も図2(B)に示すような直線を示す。従って、例えば約1kPaの静圧を得ようとすると、流量は0.5L/分となる。なお、入力正弦波のVppを10や20に変化させれば、圧電素子501の振幅が変化するので、流量及び圧力を変化させることができる。すなわち、入力正弦波のVppを滑らかに変化させた場合には、流量及び圧力を滑らかに変化させることができる。あるいは、入力正弦波の周波数を変化させれば、流量及び圧力を変化させることができる。すなわち、入力正弦波の周波数を滑らかに変化させた場合には、流量及び圧力を滑らかに変化させることができる。ただし、流量及び圧力には、圧電素子の能力や部材の強度や耐久性によって上限がある。通常は定格のVpp及び周波数で使用される。
【0022】
なお、ここでは1つの圧電素子をダイヤフラムに貼り付けたモノモルフ(ユニモフル)構造を紹介しているが、勿論、2つの圧電素子を貼り合わせて振動量を増やすバイモフル構造を採用することもできる。なお、マイクロポンプ500の構造は、液体の搬送に適した構造など、他にも様々に存在する。従って本発明では、その目的に応じて最適な構造を採用すれば良い。すなわち、本実施形態におけるマイクロポンプ500は、逆止弁を用いることなく気体を搬送できるが、そのマイクロポンプ500に代えて、吐出口又は吸入口に逆止弁を備えるマイクロポンプを適用しても良い。
【0023】
図1に戻って、このポンプユニット1は、統合吐出口50と統合吸入口60を備える。統合吐出口50は、全てのマイクロポンプ500によって搬送される流体が最終的に吐出される部位となる。この統合吐出口50には、少なくとも最下流のm1行に属しているマイクロポンプ500の吐出口542が直結される。また、統合吐出口50に近辺には、ここから吐出される流体の流量を計測する流量センサ52と、同流体の圧力を検出する圧力センサ54が設置されている。統合吸入口60は、全てのマイクロポンプ500によって搬送される流体が最初に供給される部位となる。この統合吸入口60には、少なくとも最上流のm5行に属しているマイクロポンプ500の吸入口544が直結される。
【0024】
ポンプユニット1は、吐出直結機構70、吸入直結機構80、直列結合機構90を備える。吐出直結機構70は、少なくとも中間に位置するm2〜m4行に属するマイクロポンプ500のそれぞれの吐出口542を、統合吐出口50に直結させる。特に本実施形態では、最上流のm5行に属するマイクロポンプ500のそれぞれの吐出口542も統合吐出口50に直結可能としている。吸入直結機構80は、少なくとも中間に位置するm2〜m4行に属するマイクロポンプ500のそれぞれの吸入口544を、統合吸入口60に直結させる。特に本実施形態では、最下流のm1行に属するマイクロポンプ500のそれぞれの吸入口544も統合吐出口60に直結可能としている。
【0025】
直列結合機構90は、列方向(図面における上下方向)に隣接する一対のマイクロポンプ500間で、上流行のマイクロポンプ500の吐出口542を、下流行のマイクロポンプ500の吸入口544に直結させる。
【0026】
本実施形態のポンプユニット1では、これらの吐出直結機構70、吸入直結機構80及び直列結合機構90が、行を単位として、各行に配置される複数のマイクロポンプ500の全体の接続関係をまとめて切り換える。即ち、吐出直結機構70、吸入直結機構80及び直列結合機構90は、m1行とm2行の間、m2行とm3行の間、m3行とm4行の間、m4行とm5行の間にそれぞれ1つずつ配置される。各行間に配置される吐出直結機構70は、対応する行に属している全てのマイクロポンプ500の吐出口542を、まとめて統合吐出口50に直結する。各行間に配置される吸入直結機構80は、対応する行に属している全てのマイクロポンプ500の吸入口544を、まとめて統合吸入口60に直結する。各行間に配置される直列結合機構90は、上流行に属している全てのマイクロポンプ500の吐出口542を、まとめて、下流行に属しているマイクロポンプ500の吸入口544に直結する。このようにすると、弁構造及び弁制御が簡潔化される。なお、構造は複雑化するものの、行単位ではなく、マイクロポンプ500の1つずつに、吐出直結機構70、吸入直結機構80及び直列結合機構90を配置しても良く、更に高精度な制御が可能となる。
【0027】
図3には、このポンプユニット1が備える制御装置10が示されている。この制御装置10は、ハード構成としてCPU12、第1記憶媒体14、第2記憶媒体16、第3記憶媒体18、入力装置20、表示装置22、入出力インタフェース24、バス26を備えて構成される。CPU12はいわゆる中央演算処理装置であり、各種プログラムが実行されて本制御装置10の各種機能を実現する。第1記憶媒体14はいわゆるRAM(ランダム・アクセス・メモリ)であり、CPU12の作業領域として使用されるメモリである。第2記憶媒体16はいわゆるROM(リード・オンリー・メモリ)であり、CPU12で実行される基本OSを記憶するためのメモリである。第3記憶媒体18は、磁気ディスクを内蔵したハードディスク装置、CDやDVDやBDを収容するディスク装置、不揮発性の半導体フラッシュメモリ装置などで構成されており、CPU12で実行される各種プログラム、流量センサ52及び圧力センサ54のセンシングデータ等が保存される。入力装置20は入力キーやキーボード、マウスであり、各種情報を入力する装置である。表示装置22はディスプレイであって、各種動作状態を表示する。入出力インタフェース24は、吐出直結機構70、吸入直結機構80及び直列結合機構90を動作させる電源及び制御信号や、流量センサ52及び圧力センサ54のセンシング信号、各マイクロポンプ500を動作させる電源(正弦波の波形)及び制御信号が入出力される。更にこの入出力インタフェース24は、外部のパーソナルコンピュータからプログラム等のデータを取得したり、同パーソナルコンピュータに対して計測結果を出力したりすることもできる。バス26は、CPU12、第1記憶媒体14、第2記憶媒体16、第3記憶媒体18、入力装置20、表示装置22、入出力インタフェース24などを一体的に接続して通信を行うための配線となる。
【0028】
図4には、この制御装置10に保存される制御プログラムがCPU12で実行されることで得られる機能構成が示されている。この制御装置10は、機能構成として、ポンプ制御部30、センシング部32、弁制御部34を備える。ポンプ制御部30は、マイクロポンプ500への入力正弦波のVpp及び周波数を制御する。センシング部32は、流量センサ52及び圧力センサ54のセンシング信号を常に取得してポンプ制御部30及び弁制御部34に伝達する。弁制御部34は、センシング部32のセンシング信号を参照して、吐出直結機構70、吸入直結機構80及び直列結合機構90を適宜切り換え、目標となる流量値及び圧力値に近づくように制御する。
【0029】
この制御装置10によるポンプユニット1の制御例を図5に示す。
【0030】
図5(A)には、ポンプユニット1において、全ての吐出直結機構70及び吸入直結機構80をON、全ての直列結合機構90をOFFにして、m1〜m5行のマイクロポンプ500の吐出口542を統合吐出口50に直結すると共に、m1〜m5行のマイクロポンプ500の吸入口544を統合吸入口60に直結する。このようにすると、25個のマイクロポンプ500が並列接続されるので、全ての行が、流量を優先とした搬送状態(ここでは流量優先搬送状態と呼ぶ)になる。結果、マイクロポンプ500単体と比較して、25倍の流量を得ることが出来る。
【0031】
図5(B)には、ポンプユニット1において、全ての吐出直結機構70及び吸入直結機構80をOFF、全ての直列結合機構90をONにして、上流行のマイクロポンプ500の吐出口542を、下流行のマイクロポンプ500の吸入口544に直結する。このようにすると、n1〜n5列方向にそって5段のマイクロポンプ500が直列接続される状態となり、全ての行が、圧力を優先とした搬送状態(ここでは圧力優先搬送状態と呼ぶ)になる。結果、下流側に進むにつれて流体の圧力が上昇し、出口側では約5倍の圧力を得ることが出来る。また、流量に関しては、m1〜m5行で5つのマイクロポンプ500が並列稼働している結果、単純に5個のマイクロポンプ500を直列接続した場合と比較して、約5倍の流量を得ることが出来る。
【0032】
図5(A)の流量優先搬送状態では、全てのマイクロポンプ500を稼働させる場合を例示したが、例えば図6(A)に示されるように、各行のマイクロポンプ500の駆動数を減少させて、流量を制御することが好ましい。なお、図6では、停止中のマイクロポンプ500は斜線を付記している。このようにすると、マイクロポンプ500単体の流量を仮に1とすれば、1〜25の範囲で流量を変化させることができる。
【0033】
また図5(B)の圧力優先搬送状態では、全てのマイクロポンプ500を稼働させる場合を例示したが、例えば図6(B)に示されるように、上流行のマイクロポンプ500の駆動数に対して、下流行のマイクロポンプ500の駆動数が同じ又は小さくなるように制御することが好ましい。なぜなら、例えば気体を搬送する場合、m5行からm1行に向かって気圧が上昇するにつれて、ボイルの法則によって体積が減少する。従って、各行の全てのマイクロポンプ500を駆動させなくても、十分に流量を確保できるからである。例えば、同図で示されるように、m5行では5個のマイクロポンプ500を稼働させ、m4行では4個のマイクロポンプ500を稼働させ、m3行では3個のマイクロポンプ500を稼働させ、m2行では2個のマイクロポンプ500を稼働させ、m1行では1個のマイクロポンプ500を稼働させる。各行で静圧1kPaずつ昇圧させていくと、統合吐出口50では静圧5kPaとなり、その体積(流量)も5分の1程度になる。結果、m1行における流量は、1つのマイクロポンプ500の最大許容流量の範囲内になることから、1つのマイクロポンプ500を稼働させることで、図5(B)と同じ流量を得ることが出来る。即ち、図5(B)と図6(B)では、同じ出力を得ることができるので、エネルギー効率の観点からすると、図6(B)の方が好ましい。なお、図6(B)では、上流行から下流行に移動するにつれて、マイクロポンプ500の稼働数が必ず減少する場合を例示しているが、本発明はこれに限定されず、少なくともいずれかの上流行と下流行の関係で稼働数が減少していれば、全ての行で減少させる必要は無い。
【0034】
更に、図7に示されるように、流量優先搬送状態と圧力優先搬送状態を混在させることも好ましい。ここでは、m1行とm2行の間において圧力優先搬送状態、m2行とm3行の間において流量優先搬送状態、m3行とm4行の間において圧力優先搬送状態、m4行とm5行の間において流量優先搬送状態としている。また、各行のマイクロポンプ500の稼働数も適宜制御している。このように、圧力優先搬送状態によって相互接続される一対の行の数と、流量優先搬送状態によって統合吐出口50に直結される行の数の占有関係を切り換えることで、流体の搬送圧力及び搬送流量を段階的に切り換える。結果、マイクロポンプ500の稼働数を含めた多様な組合せによって、最適な流量と圧力を決定できる。
【0035】
図8(A)には、第2実施形態に係るポンプユニット1の構成が例示されている。なお、第1実施形態と第2実施形態は、同一又は類似する部分が多いので、これらの説明は省略すると共に、ここでは第1実施形態と異なる点を中心に説明する。
【0036】
このポンプユニット1は、第1実施形態と同様に、m1〜m5行とn1〜n5列となる概念的には格子状にマイクロポンプ500が配置されているが、上流行側のマイクロポンプ500の配置数に対して、下流行のマイクロポンプ500の配置数が同じ又は小さく設定されている。具体的には、m5行では5個のマイクロポンプ500が並列配置され、m4行では4個のマイクロポンプ500が並列配置され、m3行では3個のマイクロポンプ500が並列配置され、m2行では2個のマイクロポンプ500が並列配置され、m1行では1個のマイクロポンプ500が配置される。なお、上流行から下流行に移動するにつれて、マイクロポンプ500の配置数が必ず減少する場合を例示しているが、本発明はこれに限定されるものではない。
【0037】
本第2実施形態では、この各行に並列配置されるマイクロポンプ500を、まとめて並列ポンプユニット600を呼ぶ。従って、このポンプユニット1は、並列ポンプユニット600を、m1〜m5行の5段に備えていることになる。更に、このポンプユニット1は、図8(B)(C)に拡大して示されるように、上流側の並列ポンプユニット600と下流側の並列ポンプユニット600の間において、吐出側合流空間72と、吐出直結弁74と、吸入側分岐空間82と、吸入直結弁84と、直列結合弁92を備える。なお、吐出直結弁74、吸入直結弁84及び直列結合弁92は、一つの切替弁65を回転させることでまとめて動作する。なお、切替弁65は、回転タイプのものに限定されず、電磁弁等を用いるタイプのものであってもよい。
【0038】
吐出側合流空間72は、上流側の並列ポンプユニット600の複数のマイクロポンプ500から吐出される流体がまとめて合流するチャンバ空間となる。吐出直結弁74は、図8(C)に示されるように、この吐出側合流空間72を、流体が最終的に吐出される統合吐出口50に直結したり遮断したりする弁である。
【0039】
吸入側分岐空間82は、下流側の並列ポンプユニット600の複数のマイクロポンプ500に対して、流体を分岐させながら供給する空間となっている。即ち、これらの複数のマイクロポンプ500の吸入口544がまとめて接続されるチャンバ空間となる。吸入直結弁84は、図8(C)に示されるように、この吸入側分岐空間82を、流体が最初に供給される統合吸入口60に直結したり遮断したりする弁である。
【0040】
直列結合弁92は、図8(B)に示されるように、上流側の吐出側合流空間72を、下流側の吸入側分岐空間82に直結したり遮断したりする弁である。
【0041】
従って、第1実施形態の吐出直結機構70、吸入直結機構80、直列結合機構90に対応させると、吐出側合流空間72と吐出直結弁74が吐出直結機構70となり、吸入側分岐空間82と吸入直結弁84が吸入直結機構80となり、吐出側合流空間72と吸入側分岐空間82と直列結合弁92が直列結合機構90となる。
【0042】
本第2実施形態のポンプユニット1では、吐出側合流空間72と吸入側分岐空間82と切替弁65によって、並列ポンプユニット600を単位として、各並列ポンプユニット600に属するマイクロポンプ500の全体の接続関係をまとめて切り換える。
【0043】
図9には、図1と同じ制御装置10によって、第2実施形態のポンプユニット1の制御例が示されている。
【0044】
図9(A)には、全ての直列結合弁92を遮断状態(OFF)、全ての吐出直結弁74及び吸入直結弁84を直結状態(ON)として、上流側及び下流側の全ての並列ポンプユニット600を更に並列接続とする。即ち、全てのマイクロポンプ500の吐出口542が統合吐出口50に直結されると共に、全てのマイクロポンプ500の吸入口544が統合吸入口60に直結される。このようにすると、15個のマイクロポンプ500が並列接続されるので、流量優先搬送状態になる。結果、マイクロポンプ500単体と比較して、15倍の流量を得ることが出来る。
【0045】
図9(B)には、全ての直列結合弁92を直結状態、全ての吐出直結弁74及び吸入直結弁84を遮断状態として、上流側の並列ポンプユニット600と下流側の並列ポンプユニット600を全て直列接続とする。結果、5段の並列ポンプユニット600が直列接続された圧力優先搬送状態となる。特に、流路の途中に配置される吐出側合流空間72と吸入側分岐空間82によって、各マイクロポンプ500に供給される流体、及び吐出される流体の圧力が均等化されるので、各マイクロポンプ500に均等な負荷をかけることができ、搬送効率を高めることが出来る。
【0046】
図10には、このポンプユニット1を用いて、高流量状態から高圧力状態に段階に切り替えていく制御例が示されている。まず、図10(A)に示されるように、全ての吐出側合流空間72、吸入側分岐空間82及び切替弁65を流量優先搬送状態として、15個のマイクロポンプ500を並列状態にして、1倍の圧力且つ15倍の流量を得る。
【0047】
次いで、図10(B)に示されるように、m2行とm3行の並列ポンプユニット600の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えると共に、m4行とm5行の並列ポンプユニット600の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換える。結果、これらの並列ポンプユニット500により2段階の直列接続が実現されて2倍の圧力を得ることが出来る。また、m2行及びm4行の並列ポンプユニット600による合計6つのマイクロポンプ500による6倍の流量を得る。この際、m1行の並列ポンプユニット600は休止させている。
【0048】
更に図10(C)に示されるように、図10(B)と同じ接続状態で、m2行からm5行の各並列ポンプユニット600において、1つのマイクロポンプ500を休止させて、同じ2倍の圧力を維持しながらも、合計4つの並列マイクロポンプによる4倍の流量を得る。なお、ここではマイクロポンプ500を休止させて流量を減少させる場合を示しているが、例えば、m1行とm2行の間、及びm3行とm4行の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えても、同じ状況となる。
【0049】
次いで図10(D)に示されるように、m3行とm4行の間及びm4行とm5行の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えることで、3段階の直列接続を実現して3倍の圧力を得ると同時に、m3行の並列ポンプユニット600の3つのマイクロポンプ500による3倍の流量を得る。この際、m1行とm2行の並列ポンプユニット600は休止させている。
【0050】
その後、図10(E)に示されるように、m2行とm3行の間、m3行とm4行の間及びm4行とm5行の間の吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えることで、4段階の直列接続を実現して4倍の圧力を得ると同時に、m2行の並列ポンプユニット600の2つのマイクロポンプ500による2倍の流量を得る。この際、m1行の並列ポンプユニット600は休止させている。
【0051】
最後に、図10(F)に示されるように、全ての吐出側合流空間72、吸入側分岐空間82及び切替弁65を圧力優先搬送状態に切り換えることで、5段階の直列接続を実現して5倍の圧力を得ると同時に、m1行の並列ポンプユニット600の1つのマイクロポンプ500による1倍の流量を得る。この際、各並列ポンプユニット600の全てのマイクロポンプ500は動かしている。
【0052】
このように制御を行うと、例えば図11に示されるようなバリエーションの直列段数と並列数を選択することが可能となる。従って、並列数と直列数の占有関係を段階的に切り換えれば、流量と圧量の関係を滑らかに切り換えることが可能になる。例えば点線Xに示されるように、高圧搬送と高流量搬送の間を滑らかに移行するような制御を実現することが可能となる。加えて、入力正弦波のVpp又は周波数を滑らかに変化させることで、流量と圧量の関係を更に滑らかに変化させることが可能になる。例えば点線Yに示されるように、高圧搬送と高流量搬送の間を更に滑らかに移行するような制御を実現することが可能となる。
【0053】
以上、これらの実施形態のポンプユニット1によれば、マイクロポンプ500が格子状に配置されており、吐出直結機構70、吸入直結機構80及び直列結合機構90によって、各マイクロポンプ500の直列接続と並列接続を、合理的に組み合わせて制御することが可能となる。結果、マイクロポンプ500単体では流量及び静圧が不足する用途であっても、複数のマイクロポンプ500を組み合わせて利用できるので、従来のブロアやシリンジポンプと同様に用いることができる。また、各マイクロポンプ500は小さいので、これを複数配置しても、従来のブロア等と比較して小さく且つ軽量に構成できる。特に、並列数と直列数の組合せとなる多様なバリエーションを、各マイクロポンプ500のON/OFFや、吐出直結機構70、吸入直結機構80及び直列結合機構90のON/OFFによってデジタル的に制御することが可能となるので、制御構成も極めて簡潔にすることができる。また更に、従来のブロアやシリンジポンプの場合、それら1つが故障すると、全体の流体の搬送が滞ることになるが、本実施形態のポンプユニット1によれば、個々のマイクロポンプ500が故障しても、他のマイクロポンプ500で補うことが出来るので、安全性を高めることも可能となる。
【0054】
特に本実施形態のポンプユニット1では、マイクロポンプ500が直列接続される圧力優先搬送状態において、上流行に属するマイクロポンプ500の数よりも、下流行のマイクロポンプ500の数が同等又は小さくなっている。結果、無駄なマイクロポンプ500の動作が抑制されるので消費電力を低減させることが可能となり、例えばバッテリー駆動の用途に特に適している。
【0055】
また更に、本実施形態で示したポンプユニット1では、各行に配置される複数のマイクロポンプ500の全体(並列ポンプユニット600全体)に対して、まとめて接続関係を切り換える。結果、弁の構成が簡潔となり、メンテナンス性を向上させている。特に第2実施形態のように、一対の並列ポンプユニット600の間に、吐出側合流空間72と吸入側分岐空間82を配置しているので、装置構成が簡潔化される。例えば、上流から下流に向かって並列ポンプユニット600のマイクロポンプ数500を減少させていく場合にも、途中の吐出側合流空間72及び吸入側分岐空間82がバッファ空間となるので、複雑な配管構成が不要となる。また、各並列ポンプユニット600に属するマイクロポンプ500をON/OFFするだけで、個々の弁の開閉制御を行うことなく、単位並列ポンプユニット600内でのマイクロポンプ500の並列数を簡単に増減させることができるので、制御も簡単となる。また、並列ポンプユニット600内で搬送流体の圧力が均質化されるので、搬送効率を高めることにも繋がる。
【0056】
なお、本実施形態では、最初に流体が統合吸入口60に供給され、そこから分岐して各マイクロポンプ500の吸入口544に接続される場合を例示したが、本発明はこれに限定されない。
【0057】
例えば、気体を搬送するブロア用途の場合、図12に示されるように、各マイクロポンプ500の吸入口544又は吸入側分岐空間82を、個別に大気側Sに開放して、吸気を行うことも可能である。この場合、個別に二種類以上の気体について吸気を行えるので、例えば、m1行とm2行の間及びm2行とm3行の間の吸入側分岐空間82から第一の流体(例えば酸素)の吸気を行うと共に、m3行とm4行の間及びm4行とm5行の吸入側分岐空間82、並びにm5行の各マイクロポンプ500の吸入口544から第二の流体(例えば空気)の吸気を行うことも可能である。
【0058】
あるいは、図13に示されるように、最上流のm5行の各マイクロポンプ500の吸入口544を、統合吸入口60とは別に、個別に大気側Sに開放して、吸気を行うことも可能である。この場合、個別に二種類以上の気体について吸気を行えるので、例えば、統合吸入口60、及びm5行におけるn1〜n3列のマイクロポンプ500の吸入口544から第一の流体(例えば酸素)の吸気を行うと共に、m5行におけるn4、n5列のマイクロポンプ500の吸入口544から第二の流体(例えば空気)の吸気を行うことも可能である。これらの例では、第一及び第二の流体は混合されて、統合吐出口50から吐出される。
【0059】
また、本実施形態では、外観上においてもマイクロポンプ500が格子状に配置される場合を図示したが、これは説明上の便宜からそうしたものであり、流体が通過する経路面で本実施形態のような状態になっていれば良い。即ち、流体の経路構成上において格子状であれば良く、ハードレイアウト構成は自在に変更できることは言うまでもない。
【0060】
本発明の第3実施形態として、第2実施形態で説明したポンプユニット1を、医療用の呼吸補助装置700に適用した例を図14に示す。この呼吸補助装置700は、呼吸用の気体が通過する流路702と、この流路702内に配置されて、呼気方向及び吸気方向にそれぞれ加速用の空気を放出可能な呼気ノズル704及び吸気ノズル706と、流路702の外表面に周方向に沿って配置されるポンプユニット1と、このポンプユニット1を駆動するバッテリ710を備えて構成される。流路702内に配置される呼気及び吸気ノズル704、706の近傍には、それぞれ、ベンチュリー壁720が配置される。なお、バッテリ710については、離れた場所に配置したり、電源ラインを接続することで省略したりすることもできる。
【0061】
更にポンプユニット1内における統合吐出口(図示省略)には、呼吸切替弁725が配置される。この呼吸切替弁725は、統合吐出口から吐出される空気を、呼気ノズル704から放出させる場合と、吸気ノズル706から放出させる場合を切り換える。図15(A)に示されるように、呼気ノズル704から空気を放出させる場合は、この空気がベンチュリー壁720によって広がることで呼気側が負圧状態となり、吸気側(肺側)から排出される二酸化炭素を呼び込んで、呼気方向に流す。結果、呼気動作を補助することができる。一方、図15(B)に示されるように、吸気ノズル706から空気を放出させる場合は、この空気がベンチュリー壁720によって広がることで吸気側が負圧状態となり、吸気側から供給される酸素を吸い込んで呼気方向(肺側)に流れる。結果、吸気動作を補助することができる。
【0062】
この呼吸補助装置700によれば、流路702を構成する配管自体に、小型化されたポンプユニット1が直接固定されるので、呼吸補助装置700を極めてコンパクトに構成することが出来る。更に、流路702とポンプユニット1が一体化されるので、使用者の体の動作に連動して流路702が動いても、この流路702とポンプユニット1が一緒に動くので、呼気及び吸気ノズル704、706と、ポンプユニット1の接続が途切れないで済む。従って、呼吸補助動作の安定性が増すと同時に、使用者も体を動かしやすくなる。
【0063】
更に、ポンプユニット1から呼気及び吸気ノズル704、706までの距離が短くなるので、呼吸補助動作の応答性を高めることが出来る。
【0064】
なお、この呼吸補助装置700は、使用者の口から気管に向かって挿入される挿管チューブと連続するようにして、用いることが可能であるが、例えば図16に示されるように、鼻マスク830に対して流路702を接続して用いることもできる。更に、鼻マスクに適用する場合は、例えば図17に示される呼吸補助装置800のように、鼻マスク830の外周面にポンプユニット1を直接固定することが好ましく、全体の安定性が増す。また、ここでは、1台のポンプユニット1を呼吸切替弁725で切り換えて、呼気ノズル又は吸気ノズルに供給する場合を例示したが、2台のポンプユニット1を用意して、それぞれ呼気ノズル、吸気ノズルに接続するようにしても良い。
【0065】
尚、本発明のポンプユニット及び呼吸補助装置は、上記した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【産業上の利用可能性】
【0066】
本発明のポンプユニットは、呼吸補助装置以外の様々な用途に用いることが出来る。また、本発明の呼吸補助装置は、様々な生物の呼吸補助目的で利用することができる。
【符号の説明】
【0067】
1 ポンプユニット
10 制御装置
50 統合吐出口
60 統合吸入口
65 切替弁
70 吐出直結機構
72 吐出側合流空間
74 吐出直結弁
80 吸入直結機構
82 吸入側分岐空間
84 吸入直結弁
90 直列結合機構
92 直列結合弁
500 マイクロポンプ
600 並列ポンプユニット
700、800 呼吸補助装置
702 流路
704 呼気ノズル
706 吸気ノズル
710 バッテリ
830 鼻マスク
【特許請求の範囲】
【請求項1】
行と列の関係となる格子状に配置され、前記列に沿った方向に流体を搬送する複数のマイクロポンプと、
少なくとも最下流行の前記マイクロポンプの吐出口が直結されて、前記マイクロポンプによって搬送される前記流体が最終的に吐出される統合吐出口と、
中間行の前記複数のマイクロポンプのそれぞれの吐出口を、前記統合吐出口に直結させる吐出直結機構と、
中間行の前記複数のマイクロポンプのそれぞれの吸入口を、最初に供給される前記流体に直結させる吸入直結機構と、
上流行の前記マイクロポンプの吐出口を、下流行の前記マイクロポンプの吸入口に直結させる直列結合機構と、
前記吐出直結機構、前記吸入直結切替機構及び前記直列結合機構を制御する制御装置と、を備え、
前記制御装置は、
上流行の前記マイクロポンプの吐出口を下流行の前記マイクロポンプの吸入口に直結させて前記列方向の接続を構築し、前記複数のマイクロポンプを圧力優先搬送状態とする一方、
複数行の前記マイクロポンプの吐出口を前記統合吐出口に直結すると共に、複数行に配置される前記マイクロポンプの吸入口を、最初に供給される前記流体に直結させることで、前記複数のマイクロポンプを流量優先搬送状態とすることを特徴とする、
ポンプユニット。
【請求項2】
前記圧力優先搬送状態において、
上流行の前記マイクロポンプの駆動数に対して、下流行の前記マイクロポンプの駆動数が同じ又は小さいことを特徴とする、
請求項1に記載のポンプユニット。
【請求項3】
上流行の前記マイクロポンプの配置数に対して、下流行の前記マイクロポンプの配置数が同じ又は小さいことを特徴とする、
請求項1又は2に記載のポンプユニット。
【請求項4】
前記制御装置は、
前記圧力優先搬送状態と前記流量優先搬送状態を同時に組み合わせると共に、
前記圧力優先搬送状態によって相互接続される前記行の数と、前記流量優先搬送状態によって前記統合吐出口に直結される前記行の数の占有関係を切り換えることで、前記流体の搬送圧力及び搬送流量を段階的に切り換えること特徴とする、
請求項1乃至3のいずれかに記載のポンプユニット。
【請求項5】
前記吐出直結機構、前記吸入直結機構及び前記直列結合機構は、前記行に配置される複数の前記マイクロポンプの全体に対して、まとめて、接続関係を切り換えることを特徴とする、
請求項1乃至4のいずれかに記載のポンプユニット。
【請求項6】
複数のマイクロポンプが並列配置される並列ポンプユニットを複数段に備えており、
上流側の前記並列ポンプユニットと下流側の前記並列ポンプユニットの間には、
上流側の前記並列ポンプユニットの前記複数のマイクロポンプから吐出される流体が合流する吐出側合流空間と、
下流側の前記並列ポンプユニットの前記複数のマイクロポンプに対して、流体を分岐させながら供給する吸入側分岐空間と、
上流側の前記並列ポンプユニットの前記吐出側合流空間を、下流側の前記並列ポンプユニットの前記吸入側分岐空間に直結・遮断する直列結合弁と、
上流側の前記並列ポンプユニットの前記吐出側合流空間を、流体が最終的に吐出される統合吐出口に直結・遮断する吐出直結弁と、
下流側の前記並列ポンプユニットの前記吸入側分岐空間を、最初に供給される前記流体に直結・遮断する吸入直結弁と、
が配置されることを特徴とする、
ポンプユニット。
【請求項7】
前記吐出直結弁、前記吸入直結弁及び前記直列結合弁を制御する制御装置を更に備え、
前記制御装置は、
前記直列結合弁を直結状態、前記吐出直結弁及び前記吸入直結弁を遮断状態として、上流側の前記並列ポンプユニットと下流側の前記並列ポンプユニットを直列接続する圧力優先搬送状態と、
前記直列結合弁を遮断状態、前記吐出直結弁及び前記吸入直結弁を直結状態として、上流側及び下流側の前記並列ポンプユニットを並列接続する流量優先搬送状態と、
を切り換えることを特徴とする、
請求項6に記載のポンプユニット。
【請求項8】
呼気又は吸気の気体が通過する流路と、
前記流路内に配置されて呼気又は吸気方向に加速用の気体を噴出するノズルと、
前記流路の周囲に固定され、前記ノズルに対して前記加速用の気体を供給する請求項1乃至7のいずれかに記載のポンプユニットと、を備える事を特徴とする、
呼吸補助装置。
【請求項1】
行と列の関係となる格子状に配置され、前記列に沿った方向に流体を搬送する複数のマイクロポンプと、
少なくとも最下流行の前記マイクロポンプの吐出口が直結されて、前記マイクロポンプによって搬送される前記流体が最終的に吐出される統合吐出口と、
中間行の前記複数のマイクロポンプのそれぞれの吐出口を、前記統合吐出口に直結させる吐出直結機構と、
中間行の前記複数のマイクロポンプのそれぞれの吸入口を、最初に供給される前記流体に直結させる吸入直結機構と、
上流行の前記マイクロポンプの吐出口を、下流行の前記マイクロポンプの吸入口に直結させる直列結合機構と、
前記吐出直結機構、前記吸入直結切替機構及び前記直列結合機構を制御する制御装置と、を備え、
前記制御装置は、
上流行の前記マイクロポンプの吐出口を下流行の前記マイクロポンプの吸入口に直結させて前記列方向の接続を構築し、前記複数のマイクロポンプを圧力優先搬送状態とする一方、
複数行の前記マイクロポンプの吐出口を前記統合吐出口に直結すると共に、複数行に配置される前記マイクロポンプの吸入口を、最初に供給される前記流体に直結させることで、前記複数のマイクロポンプを流量優先搬送状態とすることを特徴とする、
ポンプユニット。
【請求項2】
前記圧力優先搬送状態において、
上流行の前記マイクロポンプの駆動数に対して、下流行の前記マイクロポンプの駆動数が同じ又は小さいことを特徴とする、
請求項1に記載のポンプユニット。
【請求項3】
上流行の前記マイクロポンプの配置数に対して、下流行の前記マイクロポンプの配置数が同じ又は小さいことを特徴とする、
請求項1又は2に記載のポンプユニット。
【請求項4】
前記制御装置は、
前記圧力優先搬送状態と前記流量優先搬送状態を同時に組み合わせると共に、
前記圧力優先搬送状態によって相互接続される前記行の数と、前記流量優先搬送状態によって前記統合吐出口に直結される前記行の数の占有関係を切り換えることで、前記流体の搬送圧力及び搬送流量を段階的に切り換えること特徴とする、
請求項1乃至3のいずれかに記載のポンプユニット。
【請求項5】
前記吐出直結機構、前記吸入直結機構及び前記直列結合機構は、前記行に配置される複数の前記マイクロポンプの全体に対して、まとめて、接続関係を切り換えることを特徴とする、
請求項1乃至4のいずれかに記載のポンプユニット。
【請求項6】
複数のマイクロポンプが並列配置される並列ポンプユニットを複数段に備えており、
上流側の前記並列ポンプユニットと下流側の前記並列ポンプユニットの間には、
上流側の前記並列ポンプユニットの前記複数のマイクロポンプから吐出される流体が合流する吐出側合流空間と、
下流側の前記並列ポンプユニットの前記複数のマイクロポンプに対して、流体を分岐させながら供給する吸入側分岐空間と、
上流側の前記並列ポンプユニットの前記吐出側合流空間を、下流側の前記並列ポンプユニットの前記吸入側分岐空間に直結・遮断する直列結合弁と、
上流側の前記並列ポンプユニットの前記吐出側合流空間を、流体が最終的に吐出される統合吐出口に直結・遮断する吐出直結弁と、
下流側の前記並列ポンプユニットの前記吸入側分岐空間を、最初に供給される前記流体に直結・遮断する吸入直結弁と、
が配置されることを特徴とする、
ポンプユニット。
【請求項7】
前記吐出直結弁、前記吸入直結弁及び前記直列結合弁を制御する制御装置を更に備え、
前記制御装置は、
前記直列結合弁を直結状態、前記吐出直結弁及び前記吸入直結弁を遮断状態として、上流側の前記並列ポンプユニットと下流側の前記並列ポンプユニットを直列接続する圧力優先搬送状態と、
前記直列結合弁を遮断状態、前記吐出直結弁及び前記吸入直結弁を直結状態として、上流側及び下流側の前記並列ポンプユニットを並列接続する流量優先搬送状態と、
を切り換えることを特徴とする、
請求項6に記載のポンプユニット。
【請求項8】
呼気又は吸気の気体が通過する流路と、
前記流路内に配置されて呼気又は吸気方向に加速用の気体を噴出するノズルと、
前記流路の周囲に固定され、前記ノズルに対して前記加速用の気体を供給する請求項1乃至7のいずれかに記載のポンプユニットと、を備える事を特徴とする、
呼吸補助装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−245294(P2012−245294A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−121270(P2011−121270)
【出願日】平成23年5月31日(2011.5.31)
【特許番号】特許第4934750号(P4934750)
【特許公報発行日】平成24年5月16日(2012.5.16)
【出願人】(000138060)株式会社メトラン (23)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月31日(2011.5.31)
【特許番号】特許第4934750号(P4934750)
【特許公報発行日】平成24年5月16日(2012.5.16)
【出願人】(000138060)株式会社メトラン (23)
[ Back to top ]