
ポンプ特性計測方法及びポンプ特性計測装置
【課題】水処理プラント設備の稼働を停止することなくポンプ特性を自動計測すること。
【解決手段】制御装置10は、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にあるか否かを監視し、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、その時の平均水位差h1〜h13を検出する。そして、制御装置10は、検出された平均水位差h1〜h13と対応する吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを関連付けして記憶し、関連付けして記憶された平均水位差h1〜h13と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを用いて吸水ポンプP1〜PNのQ−H曲線及び負荷曲線を算出する。
【解決手段】制御装置10は、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にあるか否かを監視し、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、その時の平均水位差h1〜h13を検出する。そして、制御装置10は、検出された平均水位差h1〜h13と対応する吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを関連付けして記憶し、関連付けして記憶された平均水位差h1〜h13と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを用いて吸水ポンプP1〜PNのQ−H曲線及び負荷曲線を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、第1の貯水槽内の汚水を第2の貯水槽に揚水するポンプのポンプ特性を計測するポンプ特性計測方法及びポンプ特性計測装置に関するものである。
【背景技術】
【0002】
一般に、水処理プラント設備(以下、プラント設備と略記)の運用方案の意志決定を行う際には、コンピュータ技術を利用したプラント設備の挙動のシミュレーションが行われる。このシミュレーションを行うにあたって、シミュレーションモデルが現実のプラント設備を正しく表現していない場合、シミュレーションによって求められるプラント設備の挙動と現実のプラント設備の挙動とが一致せず、シミュレーションの精度が低下する。このため、シミュレーションモデルは現実のプラント設備を正しく表現したものでなければならない。このような背景から、ポンプを備えるプラント設備の挙動をシミュレーションする場合には、ポンプ単体の試運転中に計測されたQ−H曲線や効率曲線などのポンプ特性をシミュレーションモデルに用いるようにしている。なお、Q−H曲線とは、ポンプが吐出可能な液体の流量Q[m3/min]とポンプが液体を押し上げることが可能な高さ(揚程)H[m]との関係を示す曲線のことを意味する。一般に、流量Qが大きい場合、揚程Hは小さくなり、流量Qが小さい場合には、揚程Hは大きくなるので、Q−H曲線は右下がりの曲線となる。また、効率曲線とは、ポンプが吐出可能な液体の流量Q[m3/min]とポンプの効率η[%]との関係を示す曲線のことを意味する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平3−145597号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、プラント設備がポンプを複数台備える場合、各ポンプのポンプ特性は、ポンプの運転台数やポンプ間の配管の接続状態に応じてポンプ単体のポンプ特性から変化する。また、ポンプ単体のポンプ特性は、経年変化によって試運転時に計測されたポンプ特性から変化する。このため、ポンプ単体の試運転中に計測されたポンプ特性を用いてポンプを備えるプラント設備の挙動をシミュレーションした場合には、シミュレーションによって求められるポンプの挙動と現実のポンプの挙動とが一致せず、シミュレーションの精度が低下する。なお、このような問題を解決するために、プラント設備の稼働を停止してポンプのポンプ特性を計測する方法が考えられる。しかしながら、この方法によれば、プラント設備の稼働を停止するために多くの労力と時間とが必要になる。このため、ポンプを備えるプラント設備の挙動を正確にシミュレーション可能なように、プラント設備の稼働を停止することなくポンプのポンプ特性を自動計測可能な計測方法及び計測装置の提供が期待されている。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、水処理プラント設備の稼働を停止することなくポンプ特性を自動計測可能なポンプ特性計測方法及びポンプ特性計測装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決し、目的を達成するために、本発明に係るポンプ特性計測方法は、第1の貯水槽内の汚水を第2の貯水槽に揚水するポンプのポンプ特性を計測するポンプ特性計測方法であって、前記ポンプの定常運転中における回転数及び揚水量を検出する第1検出ステップと、前記第1検出ステップによって検出された回転数及び揚水量が所定の範囲内にあるか否かを判別する判別ステップと、前記判別ステップにおいて前記回転数及び前記揚水量が所定の範囲内にあると判別された場合に、前記回転数及び前記揚水量が所定の範囲内にあるときの前記第1の貯水槽内の汚水と前記第2の貯水槽内の汚水との水位差及び前記ポンプの効率の少なくとも一方を検出する第2検出ステップと、前記第2検出ステップによって検出された水位差及び効率の少なくとも一方と対応する前記回転数及び前記揚水量とを関連付けして記憶する記憶ステップと、前記記憶ステップにおいて関連付けして記憶された前記水位差及び前記効率の少なくとも一方と前記回転数及び前記揚水量とを用いて前記ポンプのQ−H曲線及び効率曲線の少なくとも一方を算出する演算ステップとを含む。
【0007】
上記課題を解決し、目的を達成するために、本発明に係るポンプ特性計測装置は、第1の貯水槽内の汚水を第2の貯水槽に揚水するポンプのポンプ特性を計測するポンプ特性計測装置であって、前記ポンプの定常運転中における回転数を検出する回転数検出手段と、前記ポンプの定常運転中における揚水量を検出する揚水量検出手段と、前記回転数検出手段及び前記揚水量検出手段によって検出された回転数及び揚水量が所定の範囲内にあるか否かを判別する判別手段と、前記判別手段によって前記回転数及び前記揚水量が所定の範囲内にあると判別された場合に、前記回転数及び前記揚水量が所定の範囲内にあるときの前記第1の貯水槽内の汚水と前記第2の貯水槽内の汚水との水位差及び前記ポンプの効率の少なくとも一方を検出する検出手段と、前記検出手段によって検出された前記水位差及び効率の少なくとも一方と前記回転数及び前記揚水量とを関連付けして記憶し、関連付けして記憶された前記水位差及び前記効率の少なくとも一方と前記回転数及び前記揚水量とを用いて前記ポンプのQ−H曲線及び効率曲線の少なくとも一方を算出する演算手段とを備える。
【発明の効果】
【0008】
本発明に係るポンプ特性計測方法及びポンプ特性計測装置によれば、水処理プラント設備の稼働を停止することなくポンプ特性を自動計測することができる。
【図面の簡単な説明】
【0009】
【図1】図1は、本発明の一実施形態であるポンプ特性計測装置が適用される水処理プラント設備の構成を示す模式図である。
【図2】図2は、吸水ポンプの揚水量の算出方法を説明するための図である。
【図3】図3は、Q−H曲線を算出するために用いられるマップの一例を示す図である。
【図4】図4は、Q−H曲線及び負荷曲線の算出に用いられる行列式の一例を示す図である。
【図5】図5は、Q−H曲線の経年変化の様子を説明するための図である。
【図6】図6は、吸水ポンプの回転数の変化に伴う効率曲線の変化を説明するための図である。
【図7】図7は、吸水ポンプの運転台数の変化に伴う効率曲線の変化を説明するための図である。
【図8】図8は、効率曲線を算出するために用いられるマップの一例を示す図である。
【図9】図9は、効率曲線の算出に用いられる行列式の一例を示す図である。
【図10】図10は、効率曲線の経年変化の様子を説明するための図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の一実施形態であるポンプ特性計測装置の構成及びその動作(ポンプ特性計測方法)について説明する。
【0011】
〔水処理プラント設備の構成〕
始めに、図1を参照して、本発明の一実施形態であるポンプ特性計測装置が適用される水処理プラント設備の構成について説明する。
【0012】
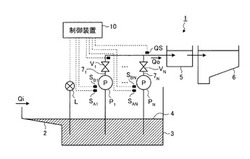
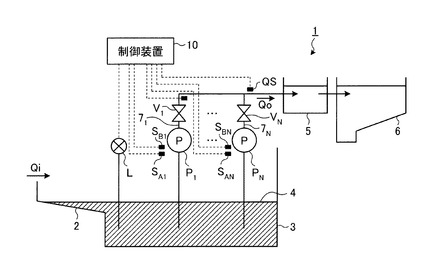
図1は、本発明の一実施形態であるポンプ特性計測装置が適用される水処理プラント設備の構成を示す模式図である。図1に示すように、本発明の一実施形態であるポンプ特性計測装置が適用される水処理プラント設備1は、沈砂池2からポンプ井3内に流れ込んだ汚水4を吐出渠5に揚水するN台の吸水ポンプP1〜PNの運転/停止を制御することによって、ポンプ井3内における汚水4の水位を所定範囲内に制御するものである。N台の吸水ポンプP1〜PNによって吐出渠5に揚水された汚水4は、初沈槽、曝気槽、終沈槽などを備える水処理設備6に供給されて処理される。ポンプ井3及び吐出渠5はそれぞれ、本発明に係る第1及び第2に貯水槽に対応する。
【0013】
水処理プラント設備1は、吸水ポンプP1〜PN毎に設けられた開閉バルブV1〜VN,回転数センサSA1〜SAN,及び電気センサSB1〜SBNと、水位センサLと、揚水量センサQSと、制御装置10と、を備える。開閉バルブV1〜VNはそれぞれ、吸水ポンプP1〜PNから吐出された汚水4が流れる配管71〜7Nに設けられ、制御装置10によって開閉制御されることによって吸水ポンプP1〜PNから吐出渠5に揚水される汚水4の流量を制御する。回転数センサSA1〜SANはそれぞれ、吸水ポンプP1〜PNの回転数を検出し、検出された回転数を示す電気信号を制御装置10に入力する。回転数センサSA1〜SANは、本発明に係る回転数検出手段として機能する。
【0014】
電気センサSB1〜SBNはそれぞれ、吸水ポンプP1〜PNの電磁接触器の動作状態を検出し、検出された動作状態を示す電気信号を制御装置10に入力する。すなわち、電気センサSB1〜SBNは、吸水ポンプP1〜PNの運転台数を検出する。また、電気センサSB1〜SBNは、吸水ポンプP1〜PNの消費電力を検出し、検出された消費電力を示す電気信号を制御装置10に入力する。すなわち、電気センサSB1〜SBNは、吸水ポンプP1〜PNの効率を検出する。水位センサLは、ポンプ井3内における汚水4の水位を検出し、検出された水位を示す電気信号を制御装置10に入力する。電気センサSB1〜SBN及び水位センサLは、本発明に係る検出手段として機能する。揚水量センサQSは、吐出渠5に揚水される汚水4の流量を動作状態にある吸水ポンプP1〜PNによる揚水量Q0として検出し、検出された揚水量Q0を示す電気信号を制御装置10に入力する。揚水量センサQSは、本発明に係る揚水量検出手段として機能する。
【0015】
制御装置10は、ワークステーションやパーソナルコンピュータなどの演算処理装置によって構成されている。制御装置10は、各センサから入力された電気信号に基づいて吸水ポンプP1〜PNの動作や回転数を制御することによって、ポンプ井3内における汚水4の水位を所定範囲内に制御する。また、制御装置10は、本発明の一実施形態であるポンプ特性計測装置として動作することによって、水処理プラント設備1が稼働しているときに動作状態にある吸水ポンプP1〜PNのポンプ特性を自動計測する。制御装置10は、本発明に係る判別手段及び演算手段として機能する。
【0016】
〔ポンプ特性計測方法〕
このような構成を有する水処理プラント設備1では、制御装置10が以下に示すように動作することによって、動作状態にある吸水ポンプP1〜PNのQ−H曲線及び効率曲線を自動計測する。以下、Q−H曲線を計測する際の動作と効率曲線を計測する際の動作とに分けて、吸水ポンプP1〜PNのポンプ特性を計測する際の制御装置10の動作について説明する。
【0017】
〔Q−H曲線の計測方法〕
始めに、図2乃至図5を参照して、吸水ポンプP1〜PNのQ−H曲線を計測する際の制御装置10の動作について説明する。
【0018】
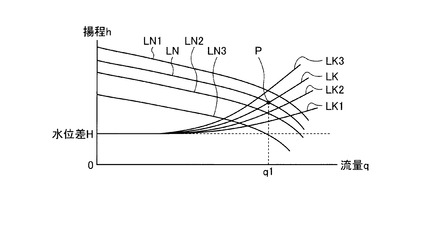
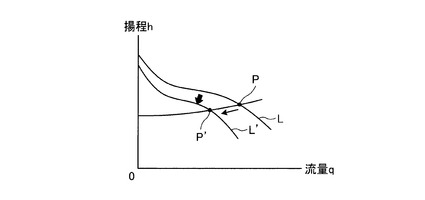
一般に、吸水ポンプP1〜PNのQ−H曲線は、水処理プラント設備1の挙動をシミュレーションする際に吸水ポンプP1〜PNの揚水量Q0を求めるために使用される。具体的には、吸水ポンプP1〜PNの揚水量Q0を求める際には、始めに、吸水ポンプP1〜PNの吐出流量qと平均回転数n1,n1,n3(n1>n2>n3)とを変数とする関数として図2に示すようなQ−H曲線LN1〜LN3を算出する。図2に示すQ−H曲線LN1〜LN3はそれぞれ、平均回転数n1〜n3に対応するQ−H曲線である。次に、ポンプ井3内の汚水と吐出渠5内の汚水との水位差Hと開閉バルブV1〜VNの平均開度K1,K2,K3(K1<K2<K3)とを変数とする関数として図2に示すような負荷曲線LK1〜LK3を算出する。図2に示す負荷曲線LK1〜LK3はそれぞれ、平均開度K1〜K3に対応する負荷曲線である。次に、吸水ポンプP1〜PNの平均回転数nを検出し、検出された平均回転数nに対応するQ−H曲線LNをQ−H曲線LN1〜LN3を利用した補間処理によって算出する。次に、開閉バルブV1〜VNの平均開度Kを検出し、検出された平均開度Kに対応する負荷曲線LKを負荷曲線LK1〜LK3を利用した補間処理によって算出する。そして、算出されたQ−H曲線LNと負荷曲線LKとの交点Pに対応する吐出流量q1を吸水ポンプP1〜PNの揚水量Q0として算出する。
【0019】
すなわち、吸水ポンプP1〜PNの揚水量Q0は、以下の数式1に示すQ−H曲線と以下の数式2に示す負荷曲線との交点を算出することによって求められる。なお、数式1中のパラメータa1,a2,a3,b1,b2,b3,c1,c2,c3,d1,d2,d3は、Q−H曲線の形状を規定するパラメータであり、吸水ポンプP1〜PNの運転台数に応じて変化する。たとえば吸水ポンプP1〜PNの運転台数がu+1台である場合、これらのパラメータは、以下に示す数式3のように表される。なお、数式3中のパラメータuは、運転台数から1を減算した数を示す。
【数1】

【数2】
【数3】
【0020】
従って、数式1中のパラメータa1,a2,a3,b1,b2,b3,c1,c2,c3,d1,d2,d3と数式2中のパラメータKとを求めることによって、吸水ポンプP1〜PNのQ−H曲線及び負荷曲線を算出することができる。そこで、数式2を以下の数式4に示すように変形し、数式4の右辺のパラメータhに数式1を代入する。数式4より、吸水ポンプP1〜PNの平均回転数n、揚水量h、及び水位差Hを検出することによって、数式1中のパラメータa1,a2,a3,b1,b2,b3,c1,c2,c3,d1,d2,d3と数式2中のパラメータKとを算出できる。
【数4】
【0021】
上記の考えに基づき、本実施形態では、制御装置10は、図3に示すようなマップに基づいて、揚水量センサQS及び回転数センサSA1〜SANから入力される電気信号に従って定常運転中における吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定の範囲内にあるか否かを判別する。具体的には、制御装置10は、揚水量qが揚水量q1,q2,q3,q4,q5から所定範囲Δq内にあり、且つ、平均回転数nが平均回転数n1,n2,n3から所定範囲Δn内にあるか否かを判別する。なお、図3に示すマップは、吸水ポンプP1〜PNの運転台数毎に用意され、制御装置10内に予め記憶されている。制御装置10は、電気センサSB1〜SBNから入力される電気信号に従って吸水ポンプP1〜PNの運転台数を検出し、検出された運転台数に対応するマップを読み出す。なお、本実施形態では、制御装置10は、吸水ポンプP1〜PNの平均回転数nを利用して制御を行うこととしたが、ポンプ井3内の水位制御の際に用いられる回転数を利用してもよい。
【0022】
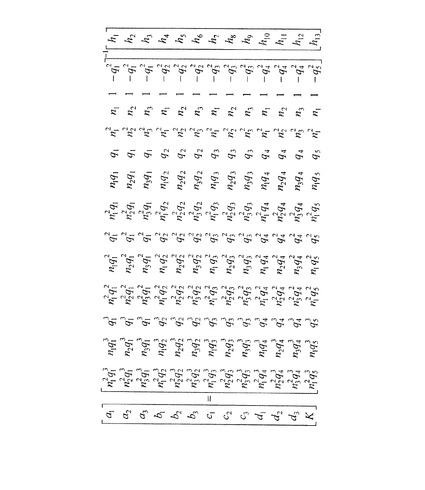
定常運転中における吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、制御装置10は、水位センサL及び吐出渠5側に設けられた図示しない水位センサから入力される電気信号に従ってその時のポンプ井3内の汚水と吐出渠5内の汚水との平均水位差h1〜h13を検出し、検出された平均水位差h1〜h13と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3の値とを関連付けして記憶する。そして、制御装置10は、関連付けして記憶された平均水位差h1〜h13と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3の値とを図4に示す行列式に代入することによって数式1中のパラメータa1,a2,a3,b1,b2,b3,c1,c2,c3,d1,d2,d3と数式2中のパラメータKとを算出する。これにより、吸水ポンプP1〜PNのQ−H曲線及び負荷曲線を算出することができる。
【0023】
以上の説明から明らかなように、制御装置10は、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にあるか否かを監視し、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、その時の平均水位差h1〜h13を検出する。そして、制御装置10は、検出された平均水位差h1〜h13と対応する吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを関連付けして記憶し、関連付けして記憶された平均水位差h1〜h13と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを図4に示す行列式に代入することによって、吸水ポンプP1〜PNのQ−H曲線及び負荷曲線を算出する。このような構成によれば、水処理プラント設備の稼働を停止することなく吸水ポンプP1〜PNのQ−H曲線を自動計測することができる。また、図5に示すように、Q−H曲線は、経時変化によって試運転時に得られた曲線Lから曲線L’へと変化し、その結果、Q−H曲線と負荷曲線との交点は点Pから点P’へと変化する。従って、Q−H曲線を自動計測可能にすることによって、経年変化によるQ−H曲線の変化を考慮して水処理プラント設備1の挙動を精度高くシミュレーションすることができる。また、Q−H曲線を長期間収集することによって、Q−H曲線の変化を経年劣化診断に活用することができる。
【0024】
〔効率曲線の計測方法〕
次に、図6乃至図10を参照して、吸水ポンプP1〜PNの効率曲線を計測する際の制御装置10の動作について説明する。
【0025】
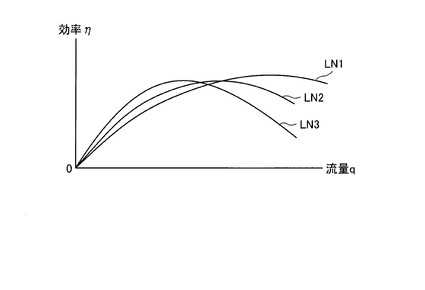
吸水ポンプP1〜PNの効率ηはその吐出流量qに応じて変化する。しかしながら、吸水ポンプP1〜PNの回転数が変化する場合には、図6に示すように、吸水ポンプP1〜PNの効率曲線LN1〜LN3は回転数に応じて変化し、吐出流量qが同じ場合であってもその効率ηは変化する。また、吸水ポンプP1〜PNの吐出側の配管が集合している場合には、図7に示すように、吸水ポンプP1〜PNの効率曲線LN1〜LN3は、吐出流量qが同じ場合であっても吸水ポンプP1〜PNの運転台数に応じて変化する。図7中、効率曲線LN1〜LN3はそれぞれ、運転台数が1台,2台,及び3台であるときの効率曲線を示す。
【0026】
一般に、吸水ポンプP1〜PNの効率曲線は、以下に示す数式5のように表される。数式5中のパラメータK11,K12,K13,K21,K22,K23,K31,K32,K33はそれぞれ、効率曲線の形状を規定するパラメータであり、吸水ポンプP1〜PNの運転台数に応じて変化する。たとえば吸水ポンプP1〜PNの運転台数がu+1台である場合、数式5中のパラメータK11,K12,K13,K21,K22,K23,K31,K32,K33は、以下に示す数式6のように表される。なお、数式6中のパラメータuは、運転台数から1を減算した数を示す。
【0027】
【数5】
【数6】
【0028】
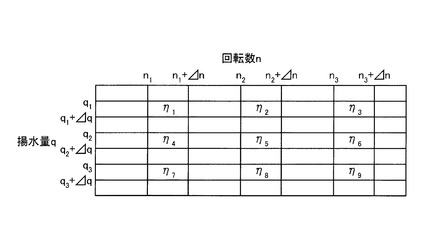
従って、数式5中のパラメータK11,K12,K13,K21,K22,K23,K31,K32,K33を求めることによって、吸水ポンプP1〜PNの効率曲線を算出することができる。そこで、本実施形態では、制御装置10は、図8に示すようなマップに基づいて、揚水量センサQS及び回転数センサSA1〜SANから入力される電気信号に従って定常運転中における吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定の範囲内にあるか否かを判別する。具体的には、制御装置10は、揚水量qが揚水量q1,q2,q3,q4,q5から所定範囲Δq内にあり、且つ、平均回転数nが平均回転数n1,n2,n3から所定範囲Δn内にあるか否かを判別する。図8に示すマップは、吸水ポンプP1〜PNの運転台数毎に用意され、制御装置10内に予め記憶されている。制御装置10は、電気センサSB1〜SBNから入力される電気信号に従って吸水ポンプP1〜PNの運転台数を検出し、検出された運転台数に対応するマップを読み出す。
【0029】
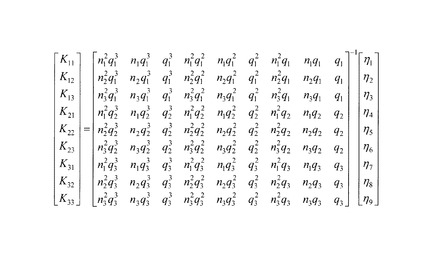
定常運転中における吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、制御装置10は、電気センサSB1〜SBNから入力される電気信号に従ってその時の吸水ポンプP1〜PNの効率η1〜η9を検出する。そして、制御装置10は、検出された効率η1〜η9と対応する吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを関連付けして記憶し、関連付けして記憶された効率η1〜η9と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを図9に示す行列式に代入することによって、数式5中のパラメータK11,K12,K13,K21,K22,K23,K31,K32,K33を算出する。これにより、吸水ポンプP1〜PNの効率曲線を算出することができる。
【0030】
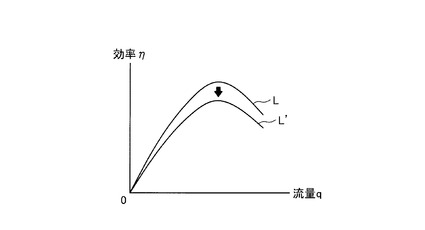
以上の説明から明らかなように、制御装置10は、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定の範囲内にあるか否かを監視し、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、その時の吸水ポンプP1〜PNの効率η1〜η9を検出する。そして、制御装置10は、検出された吸水ポンプP1〜PNの効率η1〜η9と対応する吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3の値とを関連付けして記憶し、関連付けして記憶された吸水ポンプP1〜PNの効率η1〜η9と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3の値とを図9に示す行列式に代入することによって、吸水ポンプP1〜PNの効率曲線を算出する。このような構成によれば、水処理プラント設備の稼働を停止することなく吸水ポンプP1〜PNの効率曲線を計測することができる。また、図10に示すように、効率曲線は、経時変化によって試運転時に得られた曲線Lから曲線L’へと変化する。従って、負荷曲線を自動計測可能にすることによって、経年変化による負荷曲線の変化を考慮して水処理プラント設備1の挙動を精度高くシミュレーションすることができる。また、効率曲線を長期間収集することによって、効率曲線の変化を経年劣化診断に活用することができる。
【0031】
以上、本発明者によってなされた発明を適用した実施の形態について説明したが、本実施形態による本発明の開示の一部をなす記述及び図面により本発明は限定されることはない。すなわち、本実施形態に基づいて当業者などによりなされる他の実施の形態、実施例及び運用技術などは全て本発明の範疇に含まれる。
【符号の説明】
【0032】
1 水処理プラント設備
2 沈砂池
3 ポンプ井
4 汚水
5 吐出渠
6 水処理設備
71〜7N 配管
10 制御装置
L 水位センサ
P1〜PN 吸水ポンプ
QS 揚水量センサ
SA1〜SAN 回転数センサ
SB1〜SBN 電気センサ
V1〜VN 開閉バルブ
【技術分野】
【0001】
本発明は、第1の貯水槽内の汚水を第2の貯水槽に揚水するポンプのポンプ特性を計測するポンプ特性計測方法及びポンプ特性計測装置に関するものである。
【背景技術】
【0002】
一般に、水処理プラント設備(以下、プラント設備と略記)の運用方案の意志決定を行う際には、コンピュータ技術を利用したプラント設備の挙動のシミュレーションが行われる。このシミュレーションを行うにあたって、シミュレーションモデルが現実のプラント設備を正しく表現していない場合、シミュレーションによって求められるプラント設備の挙動と現実のプラント設備の挙動とが一致せず、シミュレーションの精度が低下する。このため、シミュレーションモデルは現実のプラント設備を正しく表現したものでなければならない。このような背景から、ポンプを備えるプラント設備の挙動をシミュレーションする場合には、ポンプ単体の試運転中に計測されたQ−H曲線や効率曲線などのポンプ特性をシミュレーションモデルに用いるようにしている。なお、Q−H曲線とは、ポンプが吐出可能な液体の流量Q[m3/min]とポンプが液体を押し上げることが可能な高さ(揚程)H[m]との関係を示す曲線のことを意味する。一般に、流量Qが大きい場合、揚程Hは小さくなり、流量Qが小さい場合には、揚程Hは大きくなるので、Q−H曲線は右下がりの曲線となる。また、効率曲線とは、ポンプが吐出可能な液体の流量Q[m3/min]とポンプの効率η[%]との関係を示す曲線のことを意味する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平3−145597号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、プラント設備がポンプを複数台備える場合、各ポンプのポンプ特性は、ポンプの運転台数やポンプ間の配管の接続状態に応じてポンプ単体のポンプ特性から変化する。また、ポンプ単体のポンプ特性は、経年変化によって試運転時に計測されたポンプ特性から変化する。このため、ポンプ単体の試運転中に計測されたポンプ特性を用いてポンプを備えるプラント設備の挙動をシミュレーションした場合には、シミュレーションによって求められるポンプの挙動と現実のポンプの挙動とが一致せず、シミュレーションの精度が低下する。なお、このような問題を解決するために、プラント設備の稼働を停止してポンプのポンプ特性を計測する方法が考えられる。しかしながら、この方法によれば、プラント設備の稼働を停止するために多くの労力と時間とが必要になる。このため、ポンプを備えるプラント設備の挙動を正確にシミュレーション可能なように、プラント設備の稼働を停止することなくポンプのポンプ特性を自動計測可能な計測方法及び計測装置の提供が期待されている。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、水処理プラント設備の稼働を停止することなくポンプ特性を自動計測可能なポンプ特性計測方法及びポンプ特性計測装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決し、目的を達成するために、本発明に係るポンプ特性計測方法は、第1の貯水槽内の汚水を第2の貯水槽に揚水するポンプのポンプ特性を計測するポンプ特性計測方法であって、前記ポンプの定常運転中における回転数及び揚水量を検出する第1検出ステップと、前記第1検出ステップによって検出された回転数及び揚水量が所定の範囲内にあるか否かを判別する判別ステップと、前記判別ステップにおいて前記回転数及び前記揚水量が所定の範囲内にあると判別された場合に、前記回転数及び前記揚水量が所定の範囲内にあるときの前記第1の貯水槽内の汚水と前記第2の貯水槽内の汚水との水位差及び前記ポンプの効率の少なくとも一方を検出する第2検出ステップと、前記第2検出ステップによって検出された水位差及び効率の少なくとも一方と対応する前記回転数及び前記揚水量とを関連付けして記憶する記憶ステップと、前記記憶ステップにおいて関連付けして記憶された前記水位差及び前記効率の少なくとも一方と前記回転数及び前記揚水量とを用いて前記ポンプのQ−H曲線及び効率曲線の少なくとも一方を算出する演算ステップとを含む。
【0007】
上記課題を解決し、目的を達成するために、本発明に係るポンプ特性計測装置は、第1の貯水槽内の汚水を第2の貯水槽に揚水するポンプのポンプ特性を計測するポンプ特性計測装置であって、前記ポンプの定常運転中における回転数を検出する回転数検出手段と、前記ポンプの定常運転中における揚水量を検出する揚水量検出手段と、前記回転数検出手段及び前記揚水量検出手段によって検出された回転数及び揚水量が所定の範囲内にあるか否かを判別する判別手段と、前記判別手段によって前記回転数及び前記揚水量が所定の範囲内にあると判別された場合に、前記回転数及び前記揚水量が所定の範囲内にあるときの前記第1の貯水槽内の汚水と前記第2の貯水槽内の汚水との水位差及び前記ポンプの効率の少なくとも一方を検出する検出手段と、前記検出手段によって検出された前記水位差及び効率の少なくとも一方と前記回転数及び前記揚水量とを関連付けして記憶し、関連付けして記憶された前記水位差及び前記効率の少なくとも一方と前記回転数及び前記揚水量とを用いて前記ポンプのQ−H曲線及び効率曲線の少なくとも一方を算出する演算手段とを備える。
【発明の効果】
【0008】
本発明に係るポンプ特性計測方法及びポンプ特性計測装置によれば、水処理プラント設備の稼働を停止することなくポンプ特性を自動計測することができる。
【図面の簡単な説明】
【0009】
【図1】図1は、本発明の一実施形態であるポンプ特性計測装置が適用される水処理プラント設備の構成を示す模式図である。
【図2】図2は、吸水ポンプの揚水量の算出方法を説明するための図である。
【図3】図3は、Q−H曲線を算出するために用いられるマップの一例を示す図である。
【図4】図4は、Q−H曲線及び負荷曲線の算出に用いられる行列式の一例を示す図である。
【図5】図5は、Q−H曲線の経年変化の様子を説明するための図である。
【図6】図6は、吸水ポンプの回転数の変化に伴う効率曲線の変化を説明するための図である。
【図7】図7は、吸水ポンプの運転台数の変化に伴う効率曲線の変化を説明するための図である。
【図8】図8は、効率曲線を算出するために用いられるマップの一例を示す図である。
【図9】図9は、効率曲線の算出に用いられる行列式の一例を示す図である。
【図10】図10は、効率曲線の経年変化の様子を説明するための図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の一実施形態であるポンプ特性計測装置の構成及びその動作(ポンプ特性計測方法)について説明する。
【0011】
〔水処理プラント設備の構成〕
始めに、図1を参照して、本発明の一実施形態であるポンプ特性計測装置が適用される水処理プラント設備の構成について説明する。
【0012】
図1は、本発明の一実施形態であるポンプ特性計測装置が適用される水処理プラント設備の構成を示す模式図である。図1に示すように、本発明の一実施形態であるポンプ特性計測装置が適用される水処理プラント設備1は、沈砂池2からポンプ井3内に流れ込んだ汚水4を吐出渠5に揚水するN台の吸水ポンプP1〜PNの運転/停止を制御することによって、ポンプ井3内における汚水4の水位を所定範囲内に制御するものである。N台の吸水ポンプP1〜PNによって吐出渠5に揚水された汚水4は、初沈槽、曝気槽、終沈槽などを備える水処理設備6に供給されて処理される。ポンプ井3及び吐出渠5はそれぞれ、本発明に係る第1及び第2に貯水槽に対応する。
【0013】
水処理プラント設備1は、吸水ポンプP1〜PN毎に設けられた開閉バルブV1〜VN,回転数センサSA1〜SAN,及び電気センサSB1〜SBNと、水位センサLと、揚水量センサQSと、制御装置10と、を備える。開閉バルブV1〜VNはそれぞれ、吸水ポンプP1〜PNから吐出された汚水4が流れる配管71〜7Nに設けられ、制御装置10によって開閉制御されることによって吸水ポンプP1〜PNから吐出渠5に揚水される汚水4の流量を制御する。回転数センサSA1〜SANはそれぞれ、吸水ポンプP1〜PNの回転数を検出し、検出された回転数を示す電気信号を制御装置10に入力する。回転数センサSA1〜SANは、本発明に係る回転数検出手段として機能する。
【0014】
電気センサSB1〜SBNはそれぞれ、吸水ポンプP1〜PNの電磁接触器の動作状態を検出し、検出された動作状態を示す電気信号を制御装置10に入力する。すなわち、電気センサSB1〜SBNは、吸水ポンプP1〜PNの運転台数を検出する。また、電気センサSB1〜SBNは、吸水ポンプP1〜PNの消費電力を検出し、検出された消費電力を示す電気信号を制御装置10に入力する。すなわち、電気センサSB1〜SBNは、吸水ポンプP1〜PNの効率を検出する。水位センサLは、ポンプ井3内における汚水4の水位を検出し、検出された水位を示す電気信号を制御装置10に入力する。電気センサSB1〜SBN及び水位センサLは、本発明に係る検出手段として機能する。揚水量センサQSは、吐出渠5に揚水される汚水4の流量を動作状態にある吸水ポンプP1〜PNによる揚水量Q0として検出し、検出された揚水量Q0を示す電気信号を制御装置10に入力する。揚水量センサQSは、本発明に係る揚水量検出手段として機能する。
【0015】
制御装置10は、ワークステーションやパーソナルコンピュータなどの演算処理装置によって構成されている。制御装置10は、各センサから入力された電気信号に基づいて吸水ポンプP1〜PNの動作や回転数を制御することによって、ポンプ井3内における汚水4の水位を所定範囲内に制御する。また、制御装置10は、本発明の一実施形態であるポンプ特性計測装置として動作することによって、水処理プラント設備1が稼働しているときに動作状態にある吸水ポンプP1〜PNのポンプ特性を自動計測する。制御装置10は、本発明に係る判別手段及び演算手段として機能する。
【0016】
〔ポンプ特性計測方法〕
このような構成を有する水処理プラント設備1では、制御装置10が以下に示すように動作することによって、動作状態にある吸水ポンプP1〜PNのQ−H曲線及び効率曲線を自動計測する。以下、Q−H曲線を計測する際の動作と効率曲線を計測する際の動作とに分けて、吸水ポンプP1〜PNのポンプ特性を計測する際の制御装置10の動作について説明する。
【0017】
〔Q−H曲線の計測方法〕
始めに、図2乃至図5を参照して、吸水ポンプP1〜PNのQ−H曲線を計測する際の制御装置10の動作について説明する。
【0018】
一般に、吸水ポンプP1〜PNのQ−H曲線は、水処理プラント設備1の挙動をシミュレーションする際に吸水ポンプP1〜PNの揚水量Q0を求めるために使用される。具体的には、吸水ポンプP1〜PNの揚水量Q0を求める際には、始めに、吸水ポンプP1〜PNの吐出流量qと平均回転数n1,n1,n3(n1>n2>n3)とを変数とする関数として図2に示すようなQ−H曲線LN1〜LN3を算出する。図2に示すQ−H曲線LN1〜LN3はそれぞれ、平均回転数n1〜n3に対応するQ−H曲線である。次に、ポンプ井3内の汚水と吐出渠5内の汚水との水位差Hと開閉バルブV1〜VNの平均開度K1,K2,K3(K1<K2<K3)とを変数とする関数として図2に示すような負荷曲線LK1〜LK3を算出する。図2に示す負荷曲線LK1〜LK3はそれぞれ、平均開度K1〜K3に対応する負荷曲線である。次に、吸水ポンプP1〜PNの平均回転数nを検出し、検出された平均回転数nに対応するQ−H曲線LNをQ−H曲線LN1〜LN3を利用した補間処理によって算出する。次に、開閉バルブV1〜VNの平均開度Kを検出し、検出された平均開度Kに対応する負荷曲線LKを負荷曲線LK1〜LK3を利用した補間処理によって算出する。そして、算出されたQ−H曲線LNと負荷曲線LKとの交点Pに対応する吐出流量q1を吸水ポンプP1〜PNの揚水量Q0として算出する。
【0019】
すなわち、吸水ポンプP1〜PNの揚水量Q0は、以下の数式1に示すQ−H曲線と以下の数式2に示す負荷曲線との交点を算出することによって求められる。なお、数式1中のパラメータa1,a2,a3,b1,b2,b3,c1,c2,c3,d1,d2,d3は、Q−H曲線の形状を規定するパラメータであり、吸水ポンプP1〜PNの運転台数に応じて変化する。たとえば吸水ポンプP1〜PNの運転台数がu+1台である場合、これらのパラメータは、以下に示す数式3のように表される。なお、数式3中のパラメータuは、運転台数から1を減算した数を示す。
【数1】
【数2】
【数3】
【0020】
従って、数式1中のパラメータa1,a2,a3,b1,b2,b3,c1,c2,c3,d1,d2,d3と数式2中のパラメータKとを求めることによって、吸水ポンプP1〜PNのQ−H曲線及び負荷曲線を算出することができる。そこで、数式2を以下の数式4に示すように変形し、数式4の右辺のパラメータhに数式1を代入する。数式4より、吸水ポンプP1〜PNの平均回転数n、揚水量h、及び水位差Hを検出することによって、数式1中のパラメータa1,a2,a3,b1,b2,b3,c1,c2,c3,d1,d2,d3と数式2中のパラメータKとを算出できる。
【数4】
【0021】
上記の考えに基づき、本実施形態では、制御装置10は、図3に示すようなマップに基づいて、揚水量センサQS及び回転数センサSA1〜SANから入力される電気信号に従って定常運転中における吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定の範囲内にあるか否かを判別する。具体的には、制御装置10は、揚水量qが揚水量q1,q2,q3,q4,q5から所定範囲Δq内にあり、且つ、平均回転数nが平均回転数n1,n2,n3から所定範囲Δn内にあるか否かを判別する。なお、図3に示すマップは、吸水ポンプP1〜PNの運転台数毎に用意され、制御装置10内に予め記憶されている。制御装置10は、電気センサSB1〜SBNから入力される電気信号に従って吸水ポンプP1〜PNの運転台数を検出し、検出された運転台数に対応するマップを読み出す。なお、本実施形態では、制御装置10は、吸水ポンプP1〜PNの平均回転数nを利用して制御を行うこととしたが、ポンプ井3内の水位制御の際に用いられる回転数を利用してもよい。
【0022】
定常運転中における吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、制御装置10は、水位センサL及び吐出渠5側に設けられた図示しない水位センサから入力される電気信号に従ってその時のポンプ井3内の汚水と吐出渠5内の汚水との平均水位差h1〜h13を検出し、検出された平均水位差h1〜h13と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3の値とを関連付けして記憶する。そして、制御装置10は、関連付けして記憶された平均水位差h1〜h13と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3の値とを図4に示す行列式に代入することによって数式1中のパラメータa1,a2,a3,b1,b2,b3,c1,c2,c3,d1,d2,d3と数式2中のパラメータKとを算出する。これにより、吸水ポンプP1〜PNのQ−H曲線及び負荷曲線を算出することができる。
【0023】
以上の説明から明らかなように、制御装置10は、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にあるか否かを監視し、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、その時の平均水位差h1〜h13を検出する。そして、制御装置10は、検出された平均水位差h1〜h13と対応する吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを関連付けして記憶し、関連付けして記憶された平均水位差h1〜h13と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを図4に示す行列式に代入することによって、吸水ポンプP1〜PNのQ−H曲線及び負荷曲線を算出する。このような構成によれば、水処理プラント設備の稼働を停止することなく吸水ポンプP1〜PNのQ−H曲線を自動計測することができる。また、図5に示すように、Q−H曲線は、経時変化によって試運転時に得られた曲線Lから曲線L’へと変化し、その結果、Q−H曲線と負荷曲線との交点は点Pから点P’へと変化する。従って、Q−H曲線を自動計測可能にすることによって、経年変化によるQ−H曲線の変化を考慮して水処理プラント設備1の挙動を精度高くシミュレーションすることができる。また、Q−H曲線を長期間収集することによって、Q−H曲線の変化を経年劣化診断に活用することができる。
【0024】
〔効率曲線の計測方法〕
次に、図6乃至図10を参照して、吸水ポンプP1〜PNの効率曲線を計測する際の制御装置10の動作について説明する。
【0025】
吸水ポンプP1〜PNの効率ηはその吐出流量qに応じて変化する。しかしながら、吸水ポンプP1〜PNの回転数が変化する場合には、図6に示すように、吸水ポンプP1〜PNの効率曲線LN1〜LN3は回転数に応じて変化し、吐出流量qが同じ場合であってもその効率ηは変化する。また、吸水ポンプP1〜PNの吐出側の配管が集合している場合には、図7に示すように、吸水ポンプP1〜PNの効率曲線LN1〜LN3は、吐出流量qが同じ場合であっても吸水ポンプP1〜PNの運転台数に応じて変化する。図7中、効率曲線LN1〜LN3はそれぞれ、運転台数が1台,2台,及び3台であるときの効率曲線を示す。
【0026】
一般に、吸水ポンプP1〜PNの効率曲線は、以下に示す数式5のように表される。数式5中のパラメータK11,K12,K13,K21,K22,K23,K31,K32,K33はそれぞれ、効率曲線の形状を規定するパラメータであり、吸水ポンプP1〜PNの運転台数に応じて変化する。たとえば吸水ポンプP1〜PNの運転台数がu+1台である場合、数式5中のパラメータK11,K12,K13,K21,K22,K23,K31,K32,K33は、以下に示す数式6のように表される。なお、数式6中のパラメータuは、運転台数から1を減算した数を示す。
【0027】
【数5】
【数6】
【0028】
従って、数式5中のパラメータK11,K12,K13,K21,K22,K23,K31,K32,K33を求めることによって、吸水ポンプP1〜PNの効率曲線を算出することができる。そこで、本実施形態では、制御装置10は、図8に示すようなマップに基づいて、揚水量センサQS及び回転数センサSA1〜SANから入力される電気信号に従って定常運転中における吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定の範囲内にあるか否かを判別する。具体的には、制御装置10は、揚水量qが揚水量q1,q2,q3,q4,q5から所定範囲Δq内にあり、且つ、平均回転数nが平均回転数n1,n2,n3から所定範囲Δn内にあるか否かを判別する。図8に示すマップは、吸水ポンプP1〜PNの運転台数毎に用意され、制御装置10内に予め記憶されている。制御装置10は、電気センサSB1〜SBNから入力される電気信号に従って吸水ポンプP1〜PNの運転台数を検出し、検出された運転台数に対応するマップを読み出す。
【0029】
定常運転中における吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、制御装置10は、電気センサSB1〜SBNから入力される電気信号に従ってその時の吸水ポンプP1〜PNの効率η1〜η9を検出する。そして、制御装置10は、検出された効率η1〜η9と対応する吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを関連付けして記憶し、関連付けして記憶された効率η1〜η9と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3とを図9に示す行列式に代入することによって、数式5中のパラメータK11,K12,K13,K21,K22,K23,K31,K32,K33を算出する。これにより、吸水ポンプP1〜PNの効率曲線を算出することができる。
【0030】
以上の説明から明らかなように、制御装置10は、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定の範囲内にあるか否かを監視し、吸水ポンプP1〜PNの揚水量q及び平均回転数nが所定範囲内にある場合、その時の吸水ポンプP1〜PNの効率η1〜η9を検出する。そして、制御装置10は、検出された吸水ポンプP1〜PNの効率η1〜η9と対応する吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3の値とを関連付けして記憶し、関連付けして記憶された吸水ポンプP1〜PNの効率η1〜η9と吸水ポンプP1〜PNの揚水量q1〜q5及び平均回転数n1〜n3の値とを図9に示す行列式に代入することによって、吸水ポンプP1〜PNの効率曲線を算出する。このような構成によれば、水処理プラント設備の稼働を停止することなく吸水ポンプP1〜PNの効率曲線を計測することができる。また、図10に示すように、効率曲線は、経時変化によって試運転時に得られた曲線Lから曲線L’へと変化する。従って、負荷曲線を自動計測可能にすることによって、経年変化による負荷曲線の変化を考慮して水処理プラント設備1の挙動を精度高くシミュレーションすることができる。また、効率曲線を長期間収集することによって、効率曲線の変化を経年劣化診断に活用することができる。
【0031】
以上、本発明者によってなされた発明を適用した実施の形態について説明したが、本実施形態による本発明の開示の一部をなす記述及び図面により本発明は限定されることはない。すなわち、本実施形態に基づいて当業者などによりなされる他の実施の形態、実施例及び運用技術などは全て本発明の範疇に含まれる。
【符号の説明】
【0032】
1 水処理プラント設備
2 沈砂池
3 ポンプ井
4 汚水
5 吐出渠
6 水処理設備
71〜7N 配管
10 制御装置
L 水位センサ
P1〜PN 吸水ポンプ
QS 揚水量センサ
SA1〜SAN 回転数センサ
SB1〜SBN 電気センサ
V1〜VN 開閉バルブ
【特許請求の範囲】
【請求項1】
第1の貯水槽内の汚水を第2の貯水槽に揚水する揚水するポンプのポンプ特性を計測するポンプ特性計測方法であって、
前記ポンプの定常運転中における回転数及び揚水量を検出する第1検出ステップと、
前記第1検出ステップによって検出された回転数及び揚水量が所定の範囲内にあるか否かを判別する判別ステップと、
前記判別ステップにおいて前記回転数及び前記揚水量が所定の範囲内にあると判別された場合に、前記回転数及び前記揚水量が所定の範囲内にあるときの前記第1の貯水槽内の汚水と前記第2の貯水槽内の汚水との水位差及び前記ポンプの効率の少なくとも一方を検出する第2検出ステップと、
前記第2検出ステップによって検出された前記水位差及び効率の少なくとも一方と対応する前記回転数及び前記揚水量とを関連付けして記憶する記憶ステップと、
前記記憶ステップにおいて関連付けして記憶された前記水位差及び前記効率の少なくとも一方と前記回転数及び前記揚水量とを用いて前記ポンプのQ−H曲線及び効率曲線の少なくとも一方を算出する演算ステップと、
を含むことを特徴とするポンプ特性計測方法。
【請求項2】
前記ポンプの運転台数を検出する第3検出ステップを含み、
前記判別ステップは、前記ポンプの運転台数毎に用意された前記回転数及び前記揚水量の所定範囲を示すマップの中から、前記第3検出ステップによって検出された運転台数に対応するマップを読み出し、読み出されたマップに基づいて前記回転数及び前記揚水量が所定の範囲内にあるか否かを判別するステップを含むこと
を特徴とする請求項1に記載のポンプ特性計測方法。
【請求項3】
第1の貯水槽内の汚水を第2の貯水槽に揚水する揚水するポンプのポンプ特性を計測するポンプ特性計測装置であって、
前記ポンプの定常運転中における回転数を検出する回転数検出手段と、
前記ポンプの定常運転中における揚水量を検出する揚水量検出手段と、
前記回転数検出手段及び前記揚水量検出手段によって検出された回転数及び揚水量が所定の範囲内にあるか否かを判別する判別手段と、
前記判別手段によって前記回転数及び前記揚水量が所定の範囲内にあると判別された場合に、前記回転数及び前記揚水量が所定の範囲内にあるときの前記第1の貯水槽内の汚水と前記第2の貯水槽内の汚水との水位差及び前記ポンプの効率の少なくとも一方を検出する検出手段と、
前記検出手段によって検出された前記水位差及び効率の少なくとも一方と前記回転数及び前記揚水量とを関連付けして記憶し、関連付けして記憶された前記水位差及び前記効率の少なくとも一方と前記回転数及び前記揚水量とを用いて前記ポンプのQ−H曲線及び効率曲線の少なくとも一方を算出する演算手段と、
を備えることを特徴とするポンプ特性計測装置。
【請求項4】
前記ポンプの運転台数を検出する運転台数検出手段を備え、
前記判別手段は、前記ポンプの運転台数毎に用意された前記回転数及び前記揚水量の所定範囲を示すマップを備え、前記運転台数検出手段によって検出された運転台数に対応するマップを読み出し、読み出されたマップに基づいて前記回転数及び前記揚水量が所定の範囲内にあるか否かを判別すること
を特徴とする請求項3に記載のポンプ特性計測装置。
【請求項1】
第1の貯水槽内の汚水を第2の貯水槽に揚水する揚水するポンプのポンプ特性を計測するポンプ特性計測方法であって、
前記ポンプの定常運転中における回転数及び揚水量を検出する第1検出ステップと、
前記第1検出ステップによって検出された回転数及び揚水量が所定の範囲内にあるか否かを判別する判別ステップと、
前記判別ステップにおいて前記回転数及び前記揚水量が所定の範囲内にあると判別された場合に、前記回転数及び前記揚水量が所定の範囲内にあるときの前記第1の貯水槽内の汚水と前記第2の貯水槽内の汚水との水位差及び前記ポンプの効率の少なくとも一方を検出する第2検出ステップと、
前記第2検出ステップによって検出された前記水位差及び効率の少なくとも一方と対応する前記回転数及び前記揚水量とを関連付けして記憶する記憶ステップと、
前記記憶ステップにおいて関連付けして記憶された前記水位差及び前記効率の少なくとも一方と前記回転数及び前記揚水量とを用いて前記ポンプのQ−H曲線及び効率曲線の少なくとも一方を算出する演算ステップと、
を含むことを特徴とするポンプ特性計測方法。
【請求項2】
前記ポンプの運転台数を検出する第3検出ステップを含み、
前記判別ステップは、前記ポンプの運転台数毎に用意された前記回転数及び前記揚水量の所定範囲を示すマップの中から、前記第3検出ステップによって検出された運転台数に対応するマップを読み出し、読み出されたマップに基づいて前記回転数及び前記揚水量が所定の範囲内にあるか否かを判別するステップを含むこと
を特徴とする請求項1に記載のポンプ特性計測方法。
【請求項3】
第1の貯水槽内の汚水を第2の貯水槽に揚水する揚水するポンプのポンプ特性を計測するポンプ特性計測装置であって、
前記ポンプの定常運転中における回転数を検出する回転数検出手段と、
前記ポンプの定常運転中における揚水量を検出する揚水量検出手段と、
前記回転数検出手段及び前記揚水量検出手段によって検出された回転数及び揚水量が所定の範囲内にあるか否かを判別する判別手段と、
前記判別手段によって前記回転数及び前記揚水量が所定の範囲内にあると判別された場合に、前記回転数及び前記揚水量が所定の範囲内にあるときの前記第1の貯水槽内の汚水と前記第2の貯水槽内の汚水との水位差及び前記ポンプの効率の少なくとも一方を検出する検出手段と、
前記検出手段によって検出された前記水位差及び効率の少なくとも一方と前記回転数及び前記揚水量とを関連付けして記憶し、関連付けして記憶された前記水位差及び前記効率の少なくとも一方と前記回転数及び前記揚水量とを用いて前記ポンプのQ−H曲線及び効率曲線の少なくとも一方を算出する演算手段と、
を備えることを特徴とするポンプ特性計測装置。
【請求項4】
前記ポンプの運転台数を検出する運転台数検出手段を備え、
前記判別手段は、前記ポンプの運転台数毎に用意された前記回転数及び前記揚水量の所定範囲を示すマップを備え、前記運転台数検出手段によって検出された運転台数に対応するマップを読み出し、読み出されたマップに基づいて前記回転数及び前記揚水量が所定の範囲内にあるか否かを判別すること
を特徴とする請求項3に記載のポンプ特性計測装置。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−77701(P2012−77701A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−224895(P2010−224895)
【出願日】平成22年10月4日(2010.10.4)
【出願人】(507214083)メタウォーター株式会社 (277)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年10月4日(2010.10.4)
【出願人】(507214083)メタウォーター株式会社 (277)
【Fターム(参考)】
[ Back to top ]