
ポンプ運転計画装置
【課題】ポンプの最適な運用を行う運転計画を立てることができるポンプ運転計画装置を提供する。
【解決手段】揚水ポンプ井から水を汲み上げる複数の揚水ポンプ2eの運転計画を立案するポンプ運転計画装置であって、目的関数fを設定し、時刻i(i=0,…,23)毎の揚水ポンプ井への流入量予測値Qin(i)と、揚水ポンプ井の初期水位H(0)と、揚水ポンプ井の断面積Sと、揚水ポンプ井の上限水位Hhighおよび下限水位Hlowとを用いて、動的計画法により目的関数fを満たす複数の揚水ポンプ2eによる時刻i(i=0,…,23)毎の揚水量Qout(i)を求める揚水量計画演算部11を備えるポンプ運転計画装置。
【解決手段】揚水ポンプ井から水を汲み上げる複数の揚水ポンプ2eの運転計画を立案するポンプ運転計画装置であって、目的関数fを設定し、時刻i(i=0,…,23)毎の揚水ポンプ井への流入量予測値Qin(i)と、揚水ポンプ井の初期水位H(0)と、揚水ポンプ井の断面積Sと、揚水ポンプ井の上限水位Hhighおよび下限水位Hlowとを用いて、動的計画法により目的関数fを満たす複数の揚水ポンプ2eによる時刻i(i=0,…,23)毎の揚水量Qout(i)を求める揚水量計画演算部11を備えるポンプ運転計画装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、ポンプ運転計画装置に関する。
【背景技術】
【0002】
下水道の主な役割の一つとして、生活排水、工場廃水等の汚水の処理を行い、良好な水質にして河川等に放流することで、良好な水環境を保全するということがあげられ、今や人々の生活になくてはならない重要な社会インフラの一つとなっている。
【0003】
下水処理場では、生活排水、工場廃水等の汚水の処理を行うが、この処理は活性汚泥を処理、分解する微生物を利用した生物学的な処理により行われている。このため、流入する下水の量は、できるだけ変動が少ないことが望ましい。
【0004】
下水道施設の水処理設備に流入させる汚水をできるだけ平滑化させるために、揚水施設において揚水ポンプにより揚水する汚水量の変動を少なくする必要があり、そのような運転を実現するために予めポンプの運転計画を立てることがある。
【0005】
ポンプ運転計画を立てるためには、対象プロセスを定式化し、ある制約条件の中で所望の目的関数を最大化、もしくは最小化する、いわゆる最適化手法を用いて実現することが一般的である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特願2002−10377号公報
【特許文献2】特開平8−302759号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、ポンプの運転および停止の組合せは、ポンプの台数が多くなるほど、また計画時間が長くなるほど、非常に膨大な数になる。したがって、運転させるポンプの組合せを全て調べることは困難である。
【0008】
ポンプの運転計画を立てる手法としては、遺伝的アルゴリズム(Genetic Algorithms)を用いた手法や動的計画法(Dynamic Programming)を用いた手法、分岐限定法(Branch-and-Bound Method)を用いた手法等が提案されている。
【0009】
しかしながら、遺伝的アルゴリズムを用いた手法では、繰り返し演算を行なうことにより収束演算を行うことから、収束するまでにある程度時間が必要となる可能性があり、また得られる解が局所解である可能性があった。
【0010】
本発明は、ポンプの最適な運用を行う運転計画を立てることが可能なポンプ運転計画装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
実施形態によるポンプ運転計画装置は、揚水ポンプ井から水を汲み上げる複数の揚水ポンプの運転計画を立案するポンプ運転計画装置であって、目的関数を設定し、時刻毎の前記揚水ポンプ井への流入量予測値と、前記揚水ポンプ井の初期水位と、前記揚水ポンプ井の断面積と、前記揚水ポンプ井の上限水位および下限水位とを用いて、動的計画法により前記目的関数を満たす前記複数の揚水ポンプによる時刻毎の揚水量を求める揚水量計画演算部を備える。
【図面の簡単な説明】
【0012】
【図1】対象となるプロセスの一例を説明するための図である。
【図2】実施形態のポンプ運転計画装置により運転計画を立案するポンプが設置される下水処理施設の一構成例を概略的に示す図である。
【図3】実施形態のポンプ運転計画装置において扱うプロセスモデルの一例を説明する図である。
【図4】本実施形態のポンプ運転計画装置の一構成例を概略的に示す図である。
【図5A】揚水量の取りうる値が8段階である場合に、所定のポンプ井の初期水位、上限水位、下限水位としたとき、求められた揚水量計画の一例を示す図である。
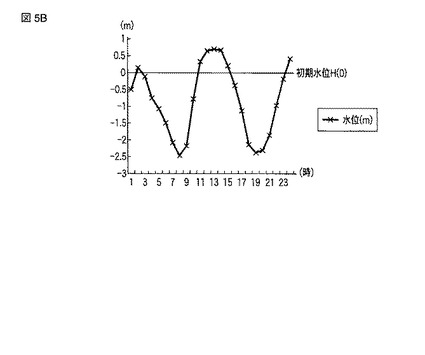
【図5B】図5Aの揚水量計画を採用した場合のポンプ井の水位の推移を示す図である。
【図6】揚水量計画を求めるアルゴリズムの一例を説明するフローチャートである。
【図7】本実施形態のポンプ運転計画装置において、hi+1(Qout(i),Qout(i+1))を求める表の一例を示す図である。
【図8】求められた揚水量計画に対して求められたポンプ運転計画の一例を示す図である。
【発明を実施するための形態】
【0013】
以下、実施形態のポンプ運転計画装置について、図面を参照して説明する。
図1は、対象となるプロセスの一例を説明するための図である。ある対象処理区域1において家庭や事業所等から発生した汚水4は、汚水管3を通じて下水処理施設2へ流入し、適切な処理を行われた後、河川等に放流される。なお、雨水管についてはここでは省略している。
【0014】
図2に、下水処理施設2の一構成例を概略的に示す。下水処理施設は、揚水設備2aと、最初沈殿池2bと、生物反応槽2cと、最終沈殿池2dと、揚水設備2aに設置された揚水ポンプ2eと、を備えている。
【0015】
揚水設備2aは、下水処理施設2へ流入する汚水4を水処理設備(最初沈殿池2b、生物反応槽2c、および、最終沈殿池2d)に入る前に一旦蓄える。その後、揚水設備2aに蓄えられた汚水4は、複数台の揚水ポンプ2eにより水処理設備の最初沈殿池2bに送られる。
【0016】
最初沈殿池2bでは、下水中の有機分を主体とする比重の浮遊物質(SS:Suspended Solids)を沈殿除去した後、下水を生物反応槽2cへと送る。
生物反応槽2cでは、最初沈殿池2bを通過した下水と活性汚泥とを混合させ、空気を接触させて、微生物反応により生物学的に処理した後、下水を最終沈殿池2dに送る。
最終沈殿池2dでは、生物反応槽2cを通過した下水の汚泥と処理水とを分離し、その処理水を、河川等に放流する。
【0017】
このように、下水処理施設2では生物学的な処理を行うため、できるだけ流入する汚水量を平滑化し、処理負荷をできるだけ安定させることが望ましい。そこで、今後下水処理施設2に流入すると予想される汚水4に対して、水処理設備に流入する量を平滑化させるためにどのように揚水ポンプ2eを運転させるかを計画することが求められる。
【0018】
以下では、揚水設備2aに設置された揚水ポンプ2eの運転計画を立てるポンプ運転計画装置について説明する。本実施形態のポンプ運転計画装置では、揚水ポンプ2eの運転計画を立てるために、最適化手法を利用してつぎのように処理や演算を行う。
【0019】
図3に、本実施形態のポンプ運転計画装置において扱うプロセスモデルの一例を説明する図を示す。なお、ここでは、1日分の計画を行うこととして記述している。
【0020】
揚水ポンプ井には、今後1日(0時〜23時)に汚水量(流入量予測値)Qin(i)(i=0,…,23)[m3]の流入が予測されている。本実施形態に係るポンプ運転計画装置は、その汚水量Qin(i)[m3]の流入に対して、水処理設備に送水(揚水)する汚水量をできるだけ平滑化するための、揚水ポンプの揚水量Qout(i)(i=0,…,23)[m3]を計画する。汚水量Qin(i)[m3]の値については、過去の実績等にもとづいて、計画を行う前にあらかじめ与えられるものである。
【0021】
なお、時刻iの汚水量(流入量予測値)Qin(i)は時刻iとなってから時刻i+1まで(i≦t<i+1)に揚水ポンプ井に流入する汚水量の予測値であって、時刻iの揚水量Qout(i)は時刻iとなってから時刻i+1までの間t(i≦t<i+1)に揚水ポンプ2eにより揚水ポンプ井から汲み上げられる水の量である。
【0022】
揚水ポンプ井の運用上の制約として、揚水ポンプ井の上限水位Hhigh[m]および下限水位Hlow[m]が定められており、ポンプ井水位は汚水の流入変動に対しても、水位H(i)(i=0,…,23)[m]がその上下限範囲の中で運用される必要がある。
【0023】
揚水ポンプ井の水位H(i)[m]は、初期水位H(0)[m]と揚水ポンプ井断面積S[m2]と汚水量Qin(i)[m3]とから算出することができる。
【0024】
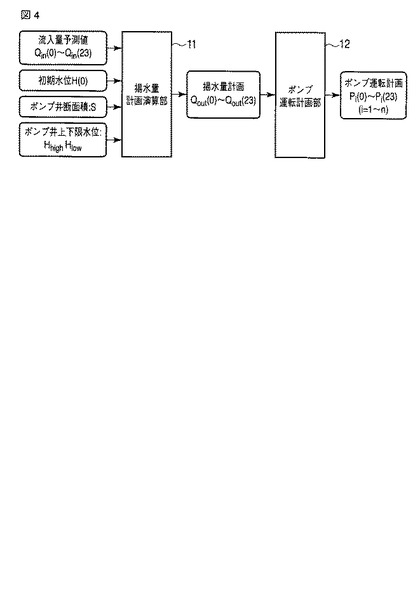
図4は、本実施形態のポンプ運転計画装置の一構成例を概略的に示す図である。本実施形態のポンプ運転計画装置は、揚水量計画演算部11とポンプ運転計画部12とを備えている。
【0025】
揚水量計画演算部11は、図3に示すプロセスモデルの一例に対して、実現したい要求を記述した関数(目的関数)を定め、この目的関数を最適化手法により解くことで、揚水量計画となる揚水量Qout(i)[m3]を求める。
【0026】
ポンプ運転計画部12は、揚水量計画演算部11で求められた揚水量計画Qout(i)[m3]に対して、複数の揚水ポンプ2eの運転あるいは停止状態として表現するポンプ運転計画Pk(i)(i=0,…,23、k=1,・・・,n)を求める。
【0027】
複数の揚水ポンプ2eの揚水量Qout(i)[m3]は、揚水ポンプ2eの定格容量(吐出量)を考慮して、ある有限の離散値Qout(i)={Q1,…,Qm}[m3]というm段階の値を取ると仮定する。例えば、1時間単位で1日分(24時間分)ポンプの運転計画を行うとした場合、揚水ポンプの揚水量の組合せはm24個あり、これらの組合せを全て調べて、最適な運転計画を求めることは、現状では極めて困難である。
【0028】
そこで、揚水量計画演算部11は、動的計画法(Dynamic Programming)により揚水量計画Qout(i)[m3]を求める。すなわち、揚水量計画演算部11は、揚水量計画が有限の離散値Qout(i)={Q1,…,Qm}[m3]を取る場合に、下記目的関数を最大化する。
J=f(Qout(0),…,Qout(23))→最大化 …(式1)
ただし、制約条件として、Hlow≦H(i)≦Hhigh(i=1,…,n)
前述したとおり、揚水ポンプの揚水量の組合せはm24個あり、これらの組合せを全て調べて、最適な運転計画を求めることは、現状では極めて困難である。
【0029】
しかしながら、上記式1に記載した目的関数が、例えば下記のような形式で記述できる場合は、全ての組合せを調べることなく、効率的に解を求めることが可能であることが知られている。
J=f1(Qout(0))+h1(Qout(0), Qout(1))+…+h23(Qout(22),Qout(23))→最大化…(式2)
本実施形態では、揚水量をできるだけ平滑化したいという観点から、ある時刻iの揚水量Qout(i)と次時刻i+1の揚水量Qout(i+1)[m3]との差をできるだけ小さくし、また流入量の平均値を基準とし、その値からの差ができるだけ小さくなるような下記目的関数を定める。
J=Σ|Qout(i+1)−Qout(i))|+Σ|Qout(i+1)−Qinave|→最小化 …(式3)
ここで、|・|は絶対値を表す。式2は目的関数を最大化する式であるのに対して、式3は目的関数を最小化する式となっていることから、ある定数Cを導入して、下記のようにすることもできる。
J=C−Σ|Qout(i+1)−Qout(i))|−Σ|Qout(i+1)−Qinave|→最大化 …(式4)
式4を式2と対応づけると、
f1(Qout(0))=C …(式5)
hi(Qout(i),Qout(i+1))=−|Qout(i+1)−Qout(i))|−|Qout(i+1)−Qinave| …(式6)
となることから、上記式5および式6を用いることにより、効率的に解を求めることが可能である。ここで、Qinaveはi=0,…,23における流入量予測の平均値であり、Qinave={Qout(0)+Qout(1)+…+Qout(23)}/24となる。
【0030】
例えば、第1揚水ポンプP1,第2揚水ポンプP2,第3揚水ポンプP3,および第4揚水ポンプP4の定格揚水量をそれぞれ、1,500[m3/h]、1,500[m3/h]、500[m3/h]、500[m3/h]とすると、揚水量の取りうる値は、Qout(i)=500、1,000、1,500、2,000、2,500、3,000、3,500、4,000[m3/h]の8段階となる。
【0031】
図5Aに、揚水量の取りうる値が上記8段階である場合に、ポンプ井の初期水位H(0)=−0.5[m]、上限水位Hhigh=0.8m、下限水位Hlow=−2.5mとしたときに、求められた揚水量計画の一例を示す。また、図5Bに、図5Aの揚水量計画を採用した場合のポンプ井の水位の推移を示す。
【0032】
揚水量計画Qout(i)を求めるアルゴリズムの概要は以下のとおりである。
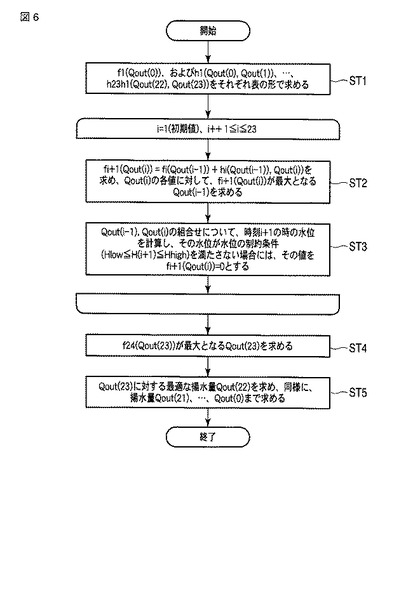
図6に、揚水量計画Qout(i)を求めるアルゴリズムの一例を説明するフローチャートを示す。
【0033】
まず、f1(Qout(0))、およびh1(Qout(0),Qout(1))、…、h23(Qout(22),Qout(23))をそれぞれ表の形で求める。(ステップST1)
図7に、hi+1(Qout(i),Qout(i+1))を求める表の一例を示す。ここで、h1(Qout(0),Qout(1))、…、h23(Qout(22),Qout(23))は、揚水量の取りうる段階をn段階とするとn×nの表であり、また各表は基本的に同一のも形式となる。図6では、揚水量の取りうる段階を8段階とし8×8の表としている。
【0034】
次に、f2(Qout(1))=f1(Qout(0))+h1(Qout(0), Qout(1))を求め、Qout(1)の各値に対して、f2(Qout(1))が最大となるQout(0)を求める。
ただし、それぞれのQout(0),Qout(1)の組合せについて、時刻i=2の時の水位を計算し、その水位が水位の制約条件(Hlow≦H(i)≦Hhigh)を満たさない場合には、その値をf2(Qout(1))=0とする。
【0035】
同様にi=2,…,23について、fi+1(Qout(i))=fi(Qout(i−1))+hi(Qout(i−1), Qout(i))を求め、Qout(i)の各値に対して、fi+1(Qout(i))が最大となるQout(i−1)を求める。 (ステップST2)
ただし、i=2,…,23それぞれの揚水量Qout(i−1),Qout(i)の組合せについて、時刻i+1の時の水位H(i+1)[m]を以下のように計算する。
H(i+1)={Qin(i+1)+Qin(i)−Qout(i+1)−Qout(i)}/S+H(i−1)
ここで、水位H(i+1)が水位の制約条件(Hlow≦H(i+1)≦Hhigh)を満たさない場合には、その値をfi+1(Qout(i))=0とする。(ステップST3)このとき基準となる時刻i−1の時の水位H(i−1)[m]については、fi(Qout(i−1))で、目的関数を最大の値とする揚水量Qout(i−2)とする。
【0036】
i=1,…,23について上記演算が終了したら、f24(Qout(23))が最大となる揚水量Qout(23)を求める。(ステップST4)
求めた揚水量Qout(23)に対する最適な揚水量Qout(22)[m3]を求める。以降、同様に、揚水量Qout(21)[m3]、…、Qout(0)[m3]まで求め、得られた揚水量Qout(0)[m3]、…、Qout(23)[m3]を揚水計画の解とする。(ステップST5)
ここでは、水位制約を満たすかどうかを判断しながら、各段階(各時刻)の目的関数の値を算定する必要がある。しかし、ある時刻において、どのような水位になっているかどうかは、その時刻までどのような揚水量とするかどうか決まるまでは算定することができない。
【0037】
そこで、水位制約を満たすかどうかの判断において、その基準となる時刻i−1の水位は、fi(Qout(i−1))で目的関数の最大の値とする揚水量Qout(i−2)[m3]を取っていくことする。このように算定することにより、演算を進めることが可能となる。
【0038】
つぎに、ポンプ運転計画部12について説明する。ポンプ運転計画部12は、求められた揚水量Qout(i)[m3]に対して、複数の揚水ポンプ2eの運転および停止状態として表現するポンプ運転計画Pk(0)〜Pk(23)(k=1,…,n)を求める。
【0039】
図8に、求められた揚水量Qout(i)[m3]に対して求められたポンプ運転計画の一例を示す。基本的に揚水量に応じて、該当するポンプの運転および停止状態を表現すればよいが、例えば、同容量のポンプが複数ある場合にそのいずれかを起動する場合には、最も停止時間の長いポンプから起動し、同容量のポンプが複数ある場合にそのいずれかを停止する場合には、最も運転時間の長いポンプから停止する、等のルールを定め、これに応じてポンプ運転計画を求める。
【0040】
なお、求められた揚水量Qout(i)[m3]に対してポンプ運転計画を立てた場合に、揚水ポンプ2eがある一区間だけ運転したり、あるいは停止したりすることが発生する場合がある。例えば図7に示すポンプ運転計画では、第4揚水ポンプP4が9時から10時の間だけ停止している。ポンプ運転計画部12は、このような場合に、目的関数の値が変わらない場合に限って、これを解消するような補正を行うことも可能である。
【0041】
上記のように本実施形態では、複数の揚水ポンプ2eの運転計画を行うために、ある時刻iとそのつぎの時刻i+1との揚水ポンプ2eの揚水量の差を陽に目的関数に含め、その目的関数(たとえば式3)を動的計画法により最小化することにより、ポンプ運転の最適な運転計画を求めることができる。目的関数が式4のように表せる場合には、目的関数を動的計画法により目的関数を最大化することにより、ポンプ運転の最適な運転計画を求めることができる。
【0042】
このとき、目的関数が式2のような形で記述することができれば、他の要求事項を目的関数に反映させ、揚水量計画およびポンプ運転計画を立てることが可能となる。したがって、本実施形態のポンプ運転計画装置においては、以上のような方法により、効率的にポンプの運転計画を立案することが可能となる。
【0043】
すなわち、本実施形態のポンプ運転計画装置によれば、ポンプの運転計画を容易に行うことができ、ポンプの最適な運用を行う運転計画を立てることができる。
【0044】
なお、本実施形態では、下水道における揚水ポンプの運転計画を立てるポンプ運転計画装置を例に説明したが、上水道における送水系の運用計画やそれに類するものに適用することが可能である。
【0045】
また、複数の中継ポンプ場の中継ポンプと下水処理場の揚水設備の揚水ポンプとにおいて、各ポンプ設備との関係を適切に記述し、また目的関数や制約関数を与えることで、これらの複数のポンプの運転計画を同時に計画することも可能である。
【0046】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0047】
Qin…汚水量(流入量予測値)、Qout[m3]…揚水量(揚水量計画)、Hhigh…上限水位、Hlow…下限水位、H…水位、H(0)…初期水位、S…揚水ポンプ井断面積、Pk…ポンプ運転計画、P1…第1揚水ポンプ、P2…第2揚水ポンプ、P3…第3揚水ポンプ、P4…第4揚水ポンプ、1…対象処理区域、2…下水処理施設、2a…揚水設備、2b…最初沈殿池、2c…生物反応槽、2d…最終沈殿池、2e…揚水ポンプ、3…汚水管、11…揚水量計画演算部、12…ポンプ運転計画部。
【技術分野】
【0001】
本発明の実施形態は、ポンプ運転計画装置に関する。
【背景技術】
【0002】
下水道の主な役割の一つとして、生活排水、工場廃水等の汚水の処理を行い、良好な水質にして河川等に放流することで、良好な水環境を保全するということがあげられ、今や人々の生活になくてはならない重要な社会インフラの一つとなっている。
【0003】
下水処理場では、生活排水、工場廃水等の汚水の処理を行うが、この処理は活性汚泥を処理、分解する微生物を利用した生物学的な処理により行われている。このため、流入する下水の量は、できるだけ変動が少ないことが望ましい。
【0004】
下水道施設の水処理設備に流入させる汚水をできるだけ平滑化させるために、揚水施設において揚水ポンプにより揚水する汚水量の変動を少なくする必要があり、そのような運転を実現するために予めポンプの運転計画を立てることがある。
【0005】
ポンプ運転計画を立てるためには、対象プロセスを定式化し、ある制約条件の中で所望の目的関数を最大化、もしくは最小化する、いわゆる最適化手法を用いて実現することが一般的である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特願2002−10377号公報
【特許文献2】特開平8−302759号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、ポンプの運転および停止の組合せは、ポンプの台数が多くなるほど、また計画時間が長くなるほど、非常に膨大な数になる。したがって、運転させるポンプの組合せを全て調べることは困難である。
【0008】
ポンプの運転計画を立てる手法としては、遺伝的アルゴリズム(Genetic Algorithms)を用いた手法や動的計画法(Dynamic Programming)を用いた手法、分岐限定法(Branch-and-Bound Method)を用いた手法等が提案されている。
【0009】
しかしながら、遺伝的アルゴリズムを用いた手法では、繰り返し演算を行なうことにより収束演算を行うことから、収束するまでにある程度時間が必要となる可能性があり、また得られる解が局所解である可能性があった。
【0010】
本発明は、ポンプの最適な運用を行う運転計画を立てることが可能なポンプ運転計画装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
実施形態によるポンプ運転計画装置は、揚水ポンプ井から水を汲み上げる複数の揚水ポンプの運転計画を立案するポンプ運転計画装置であって、目的関数を設定し、時刻毎の前記揚水ポンプ井への流入量予測値と、前記揚水ポンプ井の初期水位と、前記揚水ポンプ井の断面積と、前記揚水ポンプ井の上限水位および下限水位とを用いて、動的計画法により前記目的関数を満たす前記複数の揚水ポンプによる時刻毎の揚水量を求める揚水量計画演算部を備える。
【図面の簡単な説明】
【0012】
【図1】対象となるプロセスの一例を説明するための図である。
【図2】実施形態のポンプ運転計画装置により運転計画を立案するポンプが設置される下水処理施設の一構成例を概略的に示す図である。
【図3】実施形態のポンプ運転計画装置において扱うプロセスモデルの一例を説明する図である。
【図4】本実施形態のポンプ運転計画装置の一構成例を概略的に示す図である。
【図5A】揚水量の取りうる値が8段階である場合に、所定のポンプ井の初期水位、上限水位、下限水位としたとき、求められた揚水量計画の一例を示す図である。
【図5B】図5Aの揚水量計画を採用した場合のポンプ井の水位の推移を示す図である。
【図6】揚水量計画を求めるアルゴリズムの一例を説明するフローチャートである。
【図7】本実施形態のポンプ運転計画装置において、hi+1(Qout(i),Qout(i+1))を求める表の一例を示す図である。
【図8】求められた揚水量計画に対して求められたポンプ運転計画の一例を示す図である。
【発明を実施するための形態】
【0013】
以下、実施形態のポンプ運転計画装置について、図面を参照して説明する。
図1は、対象となるプロセスの一例を説明するための図である。ある対象処理区域1において家庭や事業所等から発生した汚水4は、汚水管3を通じて下水処理施設2へ流入し、適切な処理を行われた後、河川等に放流される。なお、雨水管についてはここでは省略している。
【0014】
図2に、下水処理施設2の一構成例を概略的に示す。下水処理施設は、揚水設備2aと、最初沈殿池2bと、生物反応槽2cと、最終沈殿池2dと、揚水設備2aに設置された揚水ポンプ2eと、を備えている。
【0015】
揚水設備2aは、下水処理施設2へ流入する汚水4を水処理設備(最初沈殿池2b、生物反応槽2c、および、最終沈殿池2d)に入る前に一旦蓄える。その後、揚水設備2aに蓄えられた汚水4は、複数台の揚水ポンプ2eにより水処理設備の最初沈殿池2bに送られる。
【0016】
最初沈殿池2bでは、下水中の有機分を主体とする比重の浮遊物質(SS:Suspended Solids)を沈殿除去した後、下水を生物反応槽2cへと送る。
生物反応槽2cでは、最初沈殿池2bを通過した下水と活性汚泥とを混合させ、空気を接触させて、微生物反応により生物学的に処理した後、下水を最終沈殿池2dに送る。
最終沈殿池2dでは、生物反応槽2cを通過した下水の汚泥と処理水とを分離し、その処理水を、河川等に放流する。
【0017】
このように、下水処理施設2では生物学的な処理を行うため、できるだけ流入する汚水量を平滑化し、処理負荷をできるだけ安定させることが望ましい。そこで、今後下水処理施設2に流入すると予想される汚水4に対して、水処理設備に流入する量を平滑化させるためにどのように揚水ポンプ2eを運転させるかを計画することが求められる。
【0018】
以下では、揚水設備2aに設置された揚水ポンプ2eの運転計画を立てるポンプ運転計画装置について説明する。本実施形態のポンプ運転計画装置では、揚水ポンプ2eの運転計画を立てるために、最適化手法を利用してつぎのように処理や演算を行う。
【0019】
図3に、本実施形態のポンプ運転計画装置において扱うプロセスモデルの一例を説明する図を示す。なお、ここでは、1日分の計画を行うこととして記述している。
【0020】
揚水ポンプ井には、今後1日(0時〜23時)に汚水量(流入量予測値)Qin(i)(i=0,…,23)[m3]の流入が予測されている。本実施形態に係るポンプ運転計画装置は、その汚水量Qin(i)[m3]の流入に対して、水処理設備に送水(揚水)する汚水量をできるだけ平滑化するための、揚水ポンプの揚水量Qout(i)(i=0,…,23)[m3]を計画する。汚水量Qin(i)[m3]の値については、過去の実績等にもとづいて、計画を行う前にあらかじめ与えられるものである。
【0021】
なお、時刻iの汚水量(流入量予測値)Qin(i)は時刻iとなってから時刻i+1まで(i≦t<i+1)に揚水ポンプ井に流入する汚水量の予測値であって、時刻iの揚水量Qout(i)は時刻iとなってから時刻i+1までの間t(i≦t<i+1)に揚水ポンプ2eにより揚水ポンプ井から汲み上げられる水の量である。
【0022】
揚水ポンプ井の運用上の制約として、揚水ポンプ井の上限水位Hhigh[m]および下限水位Hlow[m]が定められており、ポンプ井水位は汚水の流入変動に対しても、水位H(i)(i=0,…,23)[m]がその上下限範囲の中で運用される必要がある。
【0023】
揚水ポンプ井の水位H(i)[m]は、初期水位H(0)[m]と揚水ポンプ井断面積S[m2]と汚水量Qin(i)[m3]とから算出することができる。
【0024】
図4は、本実施形態のポンプ運転計画装置の一構成例を概略的に示す図である。本実施形態のポンプ運転計画装置は、揚水量計画演算部11とポンプ運転計画部12とを備えている。
【0025】
揚水量計画演算部11は、図3に示すプロセスモデルの一例に対して、実現したい要求を記述した関数(目的関数)を定め、この目的関数を最適化手法により解くことで、揚水量計画となる揚水量Qout(i)[m3]を求める。
【0026】
ポンプ運転計画部12は、揚水量計画演算部11で求められた揚水量計画Qout(i)[m3]に対して、複数の揚水ポンプ2eの運転あるいは停止状態として表現するポンプ運転計画Pk(i)(i=0,…,23、k=1,・・・,n)を求める。
【0027】
複数の揚水ポンプ2eの揚水量Qout(i)[m3]は、揚水ポンプ2eの定格容量(吐出量)を考慮して、ある有限の離散値Qout(i)={Q1,…,Qm}[m3]というm段階の値を取ると仮定する。例えば、1時間単位で1日分(24時間分)ポンプの運転計画を行うとした場合、揚水ポンプの揚水量の組合せはm24個あり、これらの組合せを全て調べて、最適な運転計画を求めることは、現状では極めて困難である。
【0028】
そこで、揚水量計画演算部11は、動的計画法(Dynamic Programming)により揚水量計画Qout(i)[m3]を求める。すなわち、揚水量計画演算部11は、揚水量計画が有限の離散値Qout(i)={Q1,…,Qm}[m3]を取る場合に、下記目的関数を最大化する。
J=f(Qout(0),…,Qout(23))→最大化 …(式1)
ただし、制約条件として、Hlow≦H(i)≦Hhigh(i=1,…,n)
前述したとおり、揚水ポンプの揚水量の組合せはm24個あり、これらの組合せを全て調べて、最適な運転計画を求めることは、現状では極めて困難である。
【0029】
しかしながら、上記式1に記載した目的関数が、例えば下記のような形式で記述できる場合は、全ての組合せを調べることなく、効率的に解を求めることが可能であることが知られている。
J=f1(Qout(0))+h1(Qout(0), Qout(1))+…+h23(Qout(22),Qout(23))→最大化…(式2)
本実施形態では、揚水量をできるだけ平滑化したいという観点から、ある時刻iの揚水量Qout(i)と次時刻i+1の揚水量Qout(i+1)[m3]との差をできるだけ小さくし、また流入量の平均値を基準とし、その値からの差ができるだけ小さくなるような下記目的関数を定める。
J=Σ|Qout(i+1)−Qout(i))|+Σ|Qout(i+1)−Qinave|→最小化 …(式3)
ここで、|・|は絶対値を表す。式2は目的関数を最大化する式であるのに対して、式3は目的関数を最小化する式となっていることから、ある定数Cを導入して、下記のようにすることもできる。
J=C−Σ|Qout(i+1)−Qout(i))|−Σ|Qout(i+1)−Qinave|→最大化 …(式4)
式4を式2と対応づけると、
f1(Qout(0))=C …(式5)
hi(Qout(i),Qout(i+1))=−|Qout(i+1)−Qout(i))|−|Qout(i+1)−Qinave| …(式6)
となることから、上記式5および式6を用いることにより、効率的に解を求めることが可能である。ここで、Qinaveはi=0,…,23における流入量予測の平均値であり、Qinave={Qout(0)+Qout(1)+…+Qout(23)}/24となる。
【0030】
例えば、第1揚水ポンプP1,第2揚水ポンプP2,第3揚水ポンプP3,および第4揚水ポンプP4の定格揚水量をそれぞれ、1,500[m3/h]、1,500[m3/h]、500[m3/h]、500[m3/h]とすると、揚水量の取りうる値は、Qout(i)=500、1,000、1,500、2,000、2,500、3,000、3,500、4,000[m3/h]の8段階となる。
【0031】
図5Aに、揚水量の取りうる値が上記8段階である場合に、ポンプ井の初期水位H(0)=−0.5[m]、上限水位Hhigh=0.8m、下限水位Hlow=−2.5mとしたときに、求められた揚水量計画の一例を示す。また、図5Bに、図5Aの揚水量計画を採用した場合のポンプ井の水位の推移を示す。
【0032】
揚水量計画Qout(i)を求めるアルゴリズムの概要は以下のとおりである。
図6に、揚水量計画Qout(i)を求めるアルゴリズムの一例を説明するフローチャートを示す。
【0033】
まず、f1(Qout(0))、およびh1(Qout(0),Qout(1))、…、h23(Qout(22),Qout(23))をそれぞれ表の形で求める。(ステップST1)
図7に、hi+1(Qout(i),Qout(i+1))を求める表の一例を示す。ここで、h1(Qout(0),Qout(1))、…、h23(Qout(22),Qout(23))は、揚水量の取りうる段階をn段階とするとn×nの表であり、また各表は基本的に同一のも形式となる。図6では、揚水量の取りうる段階を8段階とし8×8の表としている。
【0034】
次に、f2(Qout(1))=f1(Qout(0))+h1(Qout(0), Qout(1))を求め、Qout(1)の各値に対して、f2(Qout(1))が最大となるQout(0)を求める。
ただし、それぞれのQout(0),Qout(1)の組合せについて、時刻i=2の時の水位を計算し、その水位が水位の制約条件(Hlow≦H(i)≦Hhigh)を満たさない場合には、その値をf2(Qout(1))=0とする。
【0035】
同様にi=2,…,23について、fi+1(Qout(i))=fi(Qout(i−1))+hi(Qout(i−1), Qout(i))を求め、Qout(i)の各値に対して、fi+1(Qout(i))が最大となるQout(i−1)を求める。 (ステップST2)
ただし、i=2,…,23それぞれの揚水量Qout(i−1),Qout(i)の組合せについて、時刻i+1の時の水位H(i+1)[m]を以下のように計算する。
H(i+1)={Qin(i+1)+Qin(i)−Qout(i+1)−Qout(i)}/S+H(i−1)
ここで、水位H(i+1)が水位の制約条件(Hlow≦H(i+1)≦Hhigh)を満たさない場合には、その値をfi+1(Qout(i))=0とする。(ステップST3)このとき基準となる時刻i−1の時の水位H(i−1)[m]については、fi(Qout(i−1))で、目的関数を最大の値とする揚水量Qout(i−2)とする。
【0036】
i=1,…,23について上記演算が終了したら、f24(Qout(23))が最大となる揚水量Qout(23)を求める。(ステップST4)
求めた揚水量Qout(23)に対する最適な揚水量Qout(22)[m3]を求める。以降、同様に、揚水量Qout(21)[m3]、…、Qout(0)[m3]まで求め、得られた揚水量Qout(0)[m3]、…、Qout(23)[m3]を揚水計画の解とする。(ステップST5)
ここでは、水位制約を満たすかどうかを判断しながら、各段階(各時刻)の目的関数の値を算定する必要がある。しかし、ある時刻において、どのような水位になっているかどうかは、その時刻までどのような揚水量とするかどうか決まるまでは算定することができない。
【0037】
そこで、水位制約を満たすかどうかの判断において、その基準となる時刻i−1の水位は、fi(Qout(i−1))で目的関数の最大の値とする揚水量Qout(i−2)[m3]を取っていくことする。このように算定することにより、演算を進めることが可能となる。
【0038】
つぎに、ポンプ運転計画部12について説明する。ポンプ運転計画部12は、求められた揚水量Qout(i)[m3]に対して、複数の揚水ポンプ2eの運転および停止状態として表現するポンプ運転計画Pk(0)〜Pk(23)(k=1,…,n)を求める。
【0039】
図8に、求められた揚水量Qout(i)[m3]に対して求められたポンプ運転計画の一例を示す。基本的に揚水量に応じて、該当するポンプの運転および停止状態を表現すればよいが、例えば、同容量のポンプが複数ある場合にそのいずれかを起動する場合には、最も停止時間の長いポンプから起動し、同容量のポンプが複数ある場合にそのいずれかを停止する場合には、最も運転時間の長いポンプから停止する、等のルールを定め、これに応じてポンプ運転計画を求める。
【0040】
なお、求められた揚水量Qout(i)[m3]に対してポンプ運転計画を立てた場合に、揚水ポンプ2eがある一区間だけ運転したり、あるいは停止したりすることが発生する場合がある。例えば図7に示すポンプ運転計画では、第4揚水ポンプP4が9時から10時の間だけ停止している。ポンプ運転計画部12は、このような場合に、目的関数の値が変わらない場合に限って、これを解消するような補正を行うことも可能である。
【0041】
上記のように本実施形態では、複数の揚水ポンプ2eの運転計画を行うために、ある時刻iとそのつぎの時刻i+1との揚水ポンプ2eの揚水量の差を陽に目的関数に含め、その目的関数(たとえば式3)を動的計画法により最小化することにより、ポンプ運転の最適な運転計画を求めることができる。目的関数が式4のように表せる場合には、目的関数を動的計画法により目的関数を最大化することにより、ポンプ運転の最適な運転計画を求めることができる。
【0042】
このとき、目的関数が式2のような形で記述することができれば、他の要求事項を目的関数に反映させ、揚水量計画およびポンプ運転計画を立てることが可能となる。したがって、本実施形態のポンプ運転計画装置においては、以上のような方法により、効率的にポンプの運転計画を立案することが可能となる。
【0043】
すなわち、本実施形態のポンプ運転計画装置によれば、ポンプの運転計画を容易に行うことができ、ポンプの最適な運用を行う運転計画を立てることができる。
【0044】
なお、本実施形態では、下水道における揚水ポンプの運転計画を立てるポンプ運転計画装置を例に説明したが、上水道における送水系の運用計画やそれに類するものに適用することが可能である。
【0045】
また、複数の中継ポンプ場の中継ポンプと下水処理場の揚水設備の揚水ポンプとにおいて、各ポンプ設備との関係を適切に記述し、また目的関数や制約関数を与えることで、これらの複数のポンプの運転計画を同時に計画することも可能である。
【0046】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0047】
Qin…汚水量(流入量予測値)、Qout[m3]…揚水量(揚水量計画)、Hhigh…上限水位、Hlow…下限水位、H…水位、H(0)…初期水位、S…揚水ポンプ井断面積、Pk…ポンプ運転計画、P1…第1揚水ポンプ、P2…第2揚水ポンプ、P3…第3揚水ポンプ、P4…第4揚水ポンプ、1…対象処理区域、2…下水処理施設、2a…揚水設備、2b…最初沈殿池、2c…生物反応槽、2d…最終沈殿池、2e…揚水ポンプ、3…汚水管、11…揚水量計画演算部、12…ポンプ運転計画部。
【特許請求の範囲】
【請求項1】
揚水ポンプ井から水を汲み上げる複数の揚水ポンプの運転計画を立案するポンプ運転計画装置であって、
時刻毎の揚水量の変化を小さくする目的関数を設定し、時刻毎の前記揚水ポンプ井への流入量予測値と、前記揚水ポンプ井の初期水位と、前記揚水ポンプ井の断面積と、前記揚水ポンプ井の上限水位および下限水位とを用いて、動的計画法により前記目的関数を満たす前記複数の揚水ポンプによる時刻毎の揚水量を求める揚水量計画演算部を備えるポンプ運転計画装置。
【請求項2】
前記目的関数は初期関数を含むとともに、ある時刻の揚水量と次の時刻の揚水量との差を陽に含み、
前記揚水量計画演算部は前記目的関数を最大化する時刻毎の揚水量を演算する請求項1記載のポンプ運用計画装置。
【請求項3】
前記揚水量計画演算部は、時刻毎の前記目的関数の値を算定する際に、ある時刻の次の時刻の水位が前記上限水位より大きい場合あるいは前記下限水位より小さい場合、前記ある時刻の前記目的関数をゼロとする請求項1または請求項2記載のポンプ運用計画装置。
【請求項4】
前記揚水量計画演算部は、前記水位を算定する際に、過去の時刻で前記目的関数を最大の値とする揚水量を基準水位とする請求項3記載のポンプ運用計画装置。
【請求項5】
前記揚水量計画演算部は、前記複数の揚水ポンプの定格揚水量に基づいて、前記揚水量を前記定格揚水量の組み合わせにより取りうる値とする請求項1乃至請求項4のいずれか1項記載のポンプ運転計画装置。
【請求項6】
前記揚水量計画演算部で求められた各時刻の揚水量に対して、各時刻において前記複数の揚水ポンプが運転あるいは停止とする計画を立てるポンプ運転計画部をさらに備える請求項1乃至請求項5のいずれか1項記載のポンプ運転計画装置。
【請求項1】
揚水ポンプ井から水を汲み上げる複数の揚水ポンプの運転計画を立案するポンプ運転計画装置であって、
時刻毎の揚水量の変化を小さくする目的関数を設定し、時刻毎の前記揚水ポンプ井への流入量予測値と、前記揚水ポンプ井の初期水位と、前記揚水ポンプ井の断面積と、前記揚水ポンプ井の上限水位および下限水位とを用いて、動的計画法により前記目的関数を満たす前記複数の揚水ポンプによる時刻毎の揚水量を求める揚水量計画演算部を備えるポンプ運転計画装置。
【請求項2】
前記目的関数は初期関数を含むとともに、ある時刻の揚水量と次の時刻の揚水量との差を陽に含み、
前記揚水量計画演算部は前記目的関数を最大化する時刻毎の揚水量を演算する請求項1記載のポンプ運用計画装置。
【請求項3】
前記揚水量計画演算部は、時刻毎の前記目的関数の値を算定する際に、ある時刻の次の時刻の水位が前記上限水位より大きい場合あるいは前記下限水位より小さい場合、前記ある時刻の前記目的関数をゼロとする請求項1または請求項2記載のポンプ運用計画装置。
【請求項4】
前記揚水量計画演算部は、前記水位を算定する際に、過去の時刻で前記目的関数を最大の値とする揚水量を基準水位とする請求項3記載のポンプ運用計画装置。
【請求項5】
前記揚水量計画演算部は、前記複数の揚水ポンプの定格揚水量に基づいて、前記揚水量を前記定格揚水量の組み合わせにより取りうる値とする請求項1乃至請求項4のいずれか1項記載のポンプ運転計画装置。
【請求項6】
前記揚水量計画演算部で求められた各時刻の揚水量に対して、各時刻において前記複数の揚水ポンプが運転あるいは停止とする計画を立てるポンプ運転計画部をさらに備える請求項1乃至請求項5のいずれか1項記載のポンプ運転計画装置。
【図1】


【図2】
【図3】

【図4】
【図5A】

【図5B】
【図6】
【図7】

【図8】

【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【公開番号】特開2012−193547(P2012−193547A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−58436(P2011−58436)
【出願日】平成23年3月16日(2011.3.16)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月16日(2011.3.16)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]