
ポンプ
【課題】安価で、信頼性が高く、しかも安全に軸受の定量的な摩耗量を検出することができるポンプを提供する。
【解決手段】本ポンプは、羽根車10と、羽根車10を回転させる回転軸6と、羽根車10および回転軸6を収容するポンプケーシング2と、回転軸6を回転自在に支持する滑り接触面を有する軸受15と、ポンプケーシング2の外部に配置された導通検知器35と、軸受15に隣接して配置された1対の導体37と、1対の導体37の間に挟まれた絶縁材38と、導通検知器35と1対の導体37とに接続される1対の導線36とを備える。1対の導体37の端部は、軸受15の滑り接触面から回転軸6の径方向において所定の距離tだけ離間している。
【解決手段】本ポンプは、羽根車10と、羽根車10を回転させる回転軸6と、羽根車10および回転軸6を収容するポンプケーシング2と、回転軸6を回転自在に支持する滑り接触面を有する軸受15と、ポンプケーシング2の外部に配置された導通検知器35と、軸受15に隣接して配置された1対の導体37と、1対の導体37の間に挟まれた絶縁材38と、導通検知器35と1対の導体37とに接続される1対の導線36とを備える。1対の導体37の端部は、軸受15の滑り接触面から回転軸6の径方向において所定の距離tだけ離間している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、河川水や排水などの液体を揚水するポンプに関する。
【背景技術】
【0002】
一般に、立軸ポンプは、水槽上部のポンプ据付床に設置され、吊下管を介して羽根車を収容するインペラケーシングが水槽内に吊り下げられる。このような立軸ポンプでは、羽根車、回転軸などの各部材が水中に浸漬された状態で運転されるため、回転軸を支持する軸受としては、滑り軸受の一種である水中軸受が用いられている。この水中軸受は、運転時間の経過とともに摩耗するため、定期的にポンプを解体して水中軸受の摩耗量を確認し、必要に応じて補修または交換を行うことが必要となる。
【0003】
しかしながら、立軸ポンプを解体し、これを再び組み付ける作業には大変な労力とかなりの日数を要する。そこで、以下の特許文献1,2,3に開示されているように、ポンプを解体せずに水中軸受の摩耗量を測定する方法が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−161790号公報
【特許文献2】特開2004−218578号公報
【特許文献3】特許第3567140号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば、特許文献1には、ヘッドタンクに貯留された液体の水位の低下を検知することで軸受の摩耗量が所定の値に達したことを検知する立軸ポンプが開示されている。しかしながら、立軸ポンプの軸受は、一般に、10年以上の寿命があることから、ヘッドタンク内の流れのない液体が腐敗し、異臭を周囲に放つおそれがある。また、特許文献2,3の装置は、空気流量、圧力、振動値などの間接的な物理量を測定することで軸受の摩耗量を推定するものであり、定量的な摩耗量を検知する場合の信頼性が低い。
【0006】
本発明は、上述した従来の問題点に鑑みてなされたもので、安価で、信頼性が高く、しかも安全に軸受の定量的な摩耗量を検出することができるポンプを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した目的を達成するために、本発明の一態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された導通検知器と、前記軸受に隣接して配置された1対の導体と、前記1対の導体の間に挟まれた絶縁材と、前記導通検知器と前記1対の導体とに接続される1対の導線とを備え、前記1対の導体の端部は、前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0008】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された導通検知器と、前記導通検知器から前記軸受まで延びる1対の導線とを備え、前記1対の導線の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0009】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された検知器と、前記ポンプケーシングの外部から前記軸受まで延びる少なくとも1つの連通路と、前記検知器に接続され、前記連通路内を延びるシースケーブルとを備え、前記シースケーブルは、シース部と、該シース部により覆われた絶縁体と、該絶縁体の中に埋設された1本または複数の導線とを有し、前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間しており、前記シースケーブルの先端は、前記連通路の先端に位置していることを特徴とするポンプである。
【0010】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部から前記軸受まで延びる連通路と、前記連通路内を延びる光ファイバーケーブルと、前記光ファイバーケーブルに接続された光源とを備え、前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間しており、前記光ファイバーケーブルの先端は、前記連通路の先端の近傍に位置していることを特徴とするポンプである。
【0011】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された光源と、前記軸受に隣接して配置されたダミー部材と、前記光源から前記ダミー部材の内部まで延び、さらに前記ポンプケーシングの外部まで延びる少なくとも1本の光ファイバーケーブルとを備え、前記ダミー部材の内部を延びる前記光ファイバーケーブルが前記回転軸に最も近づく部分は、前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0012】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された液体貯留部と、前記液体貯留部から前記軸受まで延びる連通路とを備え、前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0013】
本発明の一参考例は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された気体供給部と、前記気体供給部から前記軸受まで延びる少なくとも1つの連通路とを備え、前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0014】
本参考例の好ましい形態は、前記気体供給部は、有色の気体を前記連通路に供給することを特徴とする。
本参考例の好ましい形態は、前記連通路の先端は前記ダミー部材の内部に位置し、前記ダミー部材および前記軸受に対向するように前記回転軸上にスリーブを設け、前記スリーブの硬度は前記軸受の硬度以下であり、かつ前記ダミー部材の硬度よりも高いことを特徴とする。
【発明の効果】
【0015】
本発明によれば、軸受の定量的な摩耗量を精度よく検出することができるポンプを提供することができる。
【図面の簡単な説明】
【0016】
【図1】図1は本発明の第1の実施形態である立軸ポンプの全体構成を示す断面図である。
【図2】図1に示す水中軸受および中空管を示す拡大図である。
【図3】水中軸受の摩耗が進んだ状態を示す図である。
【図4】供給気体として煙を用いた場合を示す図である。
【図5】本実施形態の他の構成例を示す図である。
【図6】本実施形態の他の構成例を示す図である。
【図7】本発明の他の実施形態を示す図である。
【図8】本実施形態の他の構成例を示す図である。
【図9】本実施形態の他の構成例を示す図である。
【図10】本発明の他の実施形態を示す図である。
【図11】本発明の他の実施形態を示す図である。
【図12】水中軸受の摩耗が進んだ状態を示す図である。
【図13】本実施形態の他の構成例を示す図である。
【図14】本発明の他の実施形態を示す図である。
【図15】水中軸受の摩耗が進んだ状態を示す図である。
【図16】本発明の他の実施形態を示す図である。
【図17】本実施形態の他の構成例を示す図である。
【図18】本発明の他の実施形態を示す図である。
【図19】シースケーブルを示す拡大断面図である。
【図20】水中軸受の摩耗が進んだ状態を示す図である。
【図21】シースケーブルのシース部が破れた状態を示す拡大断面図である。
【図22】本実施形態の他の構成例を示す図である。
【図23】本発明の他の実施形態を示す図である。
【図24】本発明の他の実施形態を示す図である。
【図25】本発明の他の実施形態を示す図である。
【図26】本実施形態の他の構成例を示す図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について図面を参照しながら説明する。
図1は本発明の実施形態である立軸ポンプの全体構成を示す断面図である。
図1に示すように、立軸ポンプは、吸込ベルマウス1a及びポンプボウル1bを有するインペラケーシング1と、インペラケーシング1を水槽内に吊り下げる吊下管3と、吊下管3の上端に接続される吐出曲管4と、インペラケーシング1内に収容される羽根車10と、羽根車10が固定される金属製の回転軸6とを備えている。吊下管3は、水槽上部のポンプ据付床22に形成された挿通孔24を通して下方に延び、吊下管3の上端に設けられた据付用ベース23を介してポンプ据付床22に固定される。回転軸(立軸)6は、吐出曲管4、吊下管3、及びインペラケーシング1内を通って鉛直方向に延びている。なお、インペラケーシング1及び吊下管3によりポンプケーシング2が構成される。
【0018】
吸込ベルマウス1aは下方を向いて開口し、吸込ベルマウス1aの上端はポンプボウル1bの下端に固定されている。羽根車10は回転軸6の下端に固定されており、羽根車10と回転軸6とは一体的に回転するようになっている。この羽根車10の上方(吐出側)には複数のガイドベーン14が配置されている。これらのガイドベーン14はポンプボウル1bの内周面に固定されている。回転軸6は外軸受11および水中軸受12,15により回転自在に支持されている。水中軸受12はポンプボウル1bに収容されており、水中軸受15は吊下管3に収容されている。水中軸受12を支持する支持部材7はボウルブッシュ13の内面に固定されており、さらに、ボウルブッシュ13はガイドベーン14を介してインペラケーシング1に支持されている。また、水中軸受15を支持する支持部材17は、吊下管3の内周面に固定されている。水中軸受12,15は、回転軸6に滑り接触する、いわゆる滑り軸受である。
【0019】
図1に示すように、回転軸6は吐出曲管4から上方に突出している。回転軸6の上端は駆動軸16に連結されており、駆動軸16は駆動源18に連結されている。駆動源18により回転軸6を介して羽根車10を回転させると、水槽内の水(取扱液)が吸込ベルマウス1aから吸い込まれ、ポンプボウル1b、吊下管3、吐出曲管4を通って図示しない吐出配管に移送される。なお、立軸ポンプ運転時においては、羽根車10や水中軸受12を収容するインペラケーシング1は、水面よりも下に位置している。
【0020】
吐出曲管4、吊下管3、及びインペラケーシング1の側方には、中空管(連通路)28が設けられている。この中空管28は、ポンプボウル1b、ガイドベーン14、及びボウルブッシュ13を貫通し、その端部は水中軸受12の内部に位置している。他方の端部は、ポンプ据付床22の上方に位置している。同様に、吐出曲管4及び吊下管3の側方には、中空管(連通路)29が設けられている。この中空管29は吊下管3を貫通し、その端部は水中軸受15の内部に位置している。他方の端部は、ポンプ据付床22の上方に位置している。これら中空管28,29の上方の端部は、いずれも気体供給部(例えば、コンプレッサ、ピストン)30に接続されている。
【0021】
図2は図1に示す水中軸受15および中空管29を示す拡大図であり、図3は水中軸受15の摩耗が進んだ状態を示す図である。なお、以下の説明では、水中軸受15および中空管29のみについて説明するが、水中軸受12および中空管28についても同様であるので重複する説明を省略する。
【0022】
図2に示すように、中空管29の先端は水中軸受15の内部に位置しており、水中軸受15の内周面(回転軸6との接触面)から回転軸6の径方向において所定の距離tだけ離間している。この距離tは、検知すべき水中軸受15の摩耗量に応じて決定される。
【0023】
立軸ポンプの運転中は、回転軸6は水中軸受15の内周面と滑り接触するため、ポンプの運転時間の経過とともに水中軸受15の摩耗が進み、やがて水中軸受15の内周面(滑り接触面)が中空管29の先端に達する。そうすると、ポンプケーシング2の内部と中空管29が連通し、図3に示すように、気体供給部30から送られてくる気体(例えば、空気)がポンプケーシング2の内部に導入され、気泡となって浮上する。ポンプ運転停止時には、水槽中の水位は、通常、水中軸受15よりも上方に位置しているので、気泡の発生をハンドホール19(図1参照)から目視により確認することができる。したがって、水中軸受15の摩耗量が所定の値に達したと判断することができる。この場合、CCDなどの小型カメラを使用して、気泡の発生を確認するようにしてもよい。中空管29の材料は、水中軸受15の材料よりも摩耗しやすいものが使用される。なお、水中軸受15の内部に位置する中空管29の部分のみを、水中軸受15に形成された孔により構成してもよい。
【0024】
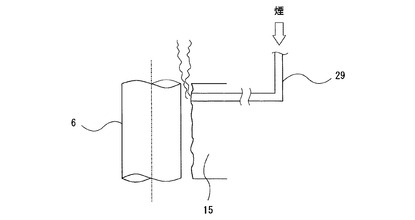
中空管29に導入される気体として、有色の気体(例えば煙)を用いることができる。この場合は、ポンプ運転が停止しているときに、水槽中の水位が水中軸受15よりも下方にある場合であっても、図4に示すように、有色の気体を目視することによって水中軸受15の摩耗を確認することができる。このように、気体を用いて確認できる構成としたことにより、液体を用いる公知の構成のような液体の腐敗のおそれがなく、環境性、維持管理性に優れた設備とすることが可能となる。
【0025】
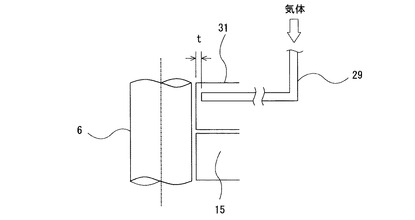
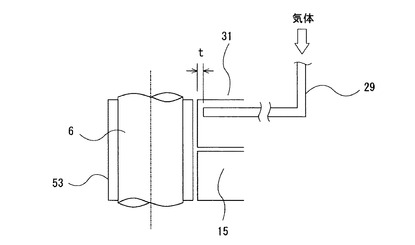
図5は本実施形態の他の構成例を示す図である。図5に示すように、中空管29は、水中軸受15に隣接する環状のダミー部材31に埋設されている。このダミー部材31は、水中軸受15と同心上に配置され、水中軸受15の内径と等しい内径またはそれ以上の内径を有している。さらに、ダミー部材31は、水中軸受15よりも硬度が低い(すなわち摩耗しやすい)材料、例えばプラスチックなどから形成されている。中空管29の先端は、上述の例と同様に、水中軸受15の内周面から所定の距離tだけ離間している。
【0026】
水中軸受15が摩耗すると、回転軸6の振れにより、同時にダミー部材31が摩耗する。ダミー部材31の摩耗が進むと、やがて中空管29がポンプケーシング2の内部と連通し、気体供給部30から気体がポンプケーシング2の内部に導入される。このダミー部材31の摩耗量は水中軸受15の摩耗量と概ね等しいので、上述の例と同様に、気泡の発生または有色の気体を視認することにより、水中軸受15の摩耗量が所定の値に達したことを検知することができる。
【0027】
なお、図6に示すように、複数の中空管29a,29b,29cを設けてもよい。なお、図示しているのは3本の中空管であるが、中空管は3本より多くてもかまわない。この場合は、それぞれの中空管29a,29b,29cの先端と水中軸受15の内周面との距離t1,t2,t3は互いに異なるように設定する。このような構成によれば、水中軸受15の摩耗の進行状況が分かるので、水中軸受15の交換時期を適切に予測することが可能となり、計画的な維持管理を行うことが可能となる。例えば、t3を軸受交換が必要な軸受摩耗量に設定し、t1,t2をt3より小さい寸法(摩耗量)に設定し、対象となる中空管への気体供給により、現状の軸受摩耗量を把握し、運転時間等からt3に到達する時間を推測することにより、計画的な予算の計上や交換軸受の事前手配が可能になるとともに、軸受製作期間の分だけ、排水機能停止期間を短くすることができ、信頼性が向上する。
【0028】
図7は、本発明の他の実施形態を示す図である。なお、特に説明しない構成は上述した実施形態と同様であるので、その重複する説明を省略する。
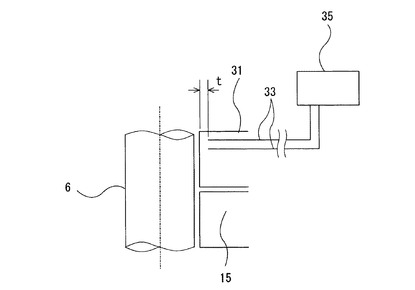
図7に示すように、ダミー部材31の内部には1対の導線33が配置されている。本実施形態においては、ダミー部材31は絶縁材から形成されており、これらの導線33は互いに電気的に非接触に保たれている。それぞれの導線33の一方の端部は水中軸受15の内周面から回転軸6の径方向において距離tだけ離間した位置にあり、他方の端部は導通検知器35に接続されている。なお、本実施形態においては、図1に示す中空管28,29に代えて導線33が、空気供給部30に代えて導通検知器35が設けられている。
【0029】
この構成において、ダミー部材31が摩耗して導線33の先端がダミー部材31の内周面上に露出すると、金属製の回転軸6やポンプケーシング2内の水によりこれら1対の導線33が電気的に接続される。したがって、導通検知器35が導線33の電気的接続を検知することにより、水中軸受15の摩耗量が所定の値に達したことを検知することができる。なお、本実施形態において、水中軸受15内に導線33を配置してもよい。
【0030】
上述した特許文献1には、導線に電流を流し、回転軸により導線が切断されたことを検知することにより水中軸受の摩耗を検知する構成が開示されている。しかしながら、この構成では、導線の材質や配置によっては、摩耗量が所定の値に達していても、完全な断線に至らない場合があり、信頼性に劣る。本実施形態によれば、導線33の端部がダミー部材31の内周面上に露出すれば導通検知器35が導線33の電気的接続を検知することが可能であり、検知の信頼性を高めることができる。また、導線33が接続されたときにのみ電流が流れることになるので、常時電流を流す必要がある特許文献1の構成に比べてエネルギーを節約することができる。
【0031】
図8に示すように、1対の導線33に加えて、複数の導線34をダミー部材31に埋設してもよい(図8の例では3本であるが、3本より多くてもかまわない)。この例では、追加された導線34の先端と水中軸受15の内周面との距離t2,t3,t4は互いに異なり、かつ、導線34の先端は上述した1対の導線33の先端よりも回転軸6の径方向において外側に位置している。このような構成によれば、水中軸受15の摩耗の進行状況が分かるので、水中軸受15の交換時期を適切に予測することが可能となり、計画的な維持管理を行うことが可能となる。例えば、t3を軸受交換が必要な軸受摩耗量に設定し、t1,t2をt3より小さい寸法(摩耗量)に設定し、対象となる導線の導通検知により、現状の軸受摩耗量を把握し、運転時間等からt3に到達する時間を推測することにより、計画的な予算の計上や交換軸受の事前手配が可能になるとともに、軸受製作期間の分だけ、排水機能停止期間を短くすることができ、信頼性が向上する。
【0032】
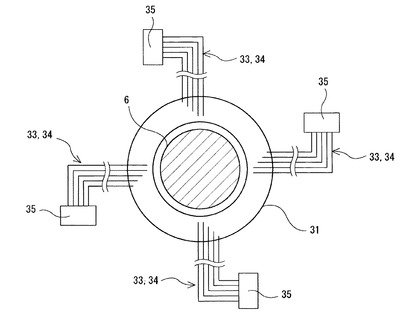
さらに、図9に示すように、図8に示す構成(複数の導線33,34および導通検知器35)を、回転軸6の周方向において複数設けてもよい。このような構成によれば、一部の導線33,34または導通検知器35が故障した場合でも、他の導線33,34または導通検知器35により水中軸受15の摩耗を検知することができる。また、水中軸受15が偏摩耗しているかどうか、および水中軸受15が周方向に均等に摩耗しているかどうかを判断することができる。なお、図9の例では、4組の導線33,34および導通検知器35を配置しているが、2組、3組、または4組よりも多い導線および導通検知器を配置してもよい。
【0033】
本実施形態において、立軸ポンプの運転中または運転時の所定の時間にのみ、導通検知器35を動作させることが好ましい。その理由は次の通りである。水中軸受15が摩耗して、例えば、図8のt2とt3との間に内周面が位置するとき、一部の導線33,34同士は電気的に接続されているので、これらの導線には電流が流れることになる。しかし、この種の立軸ポンプは、年間数十時間程度しか運転されないため、導電33,34に電流が流れるままにしておくと、ポンプの停止中にも電流が消費され、エネルギーの無駄となる。さらに、導線33,34を流れる電流が腐食電流としてポンプケーシング2などの部材に作用し、これらの部材を腐食させるおそれもある。このような理由から、立軸ポンプの運転中または運転時の所定の時間にのみ、導通検知器35を動作させることが好ましい。
【0034】
図10は本発明の他の実施形態を示す図である。本実施形態の基本的構成は図7に示す構成と同様であるので、その重複する説明を省略する。
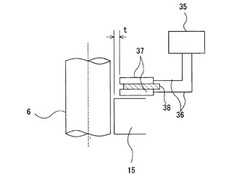
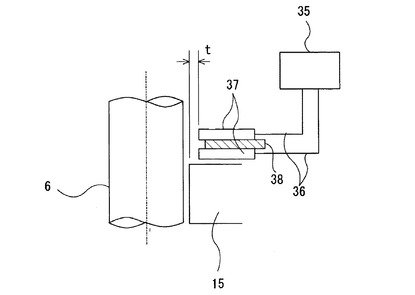
図10に示すように、1対の導線36の先端には棒状または板状の1対の導体37がそれぞれ接続されており、これらの導体37は水中軸受15に隣接して配置されている。導体37の間には絶縁材38が配置されており、導体37は互いに電気的に非接触となっている。これらの導体37は、その端部が水中軸受15の内周面よりも回転軸6の径方向において所定の距離tだけ外側に位置するように配置されている。
【0035】
本実施形態においても、水中軸受15が摩耗すると、回転軸6を介してこれら1対の導体37が電気的に接続される。したがって、導通検知器35が導体37の電気的接続または導体37と回転軸6との電気的接続を検知することにより、水中軸受15の摩耗量が所定の値に達したことを検知することができる。本実施形態の構成は、図7の実施形態のようにダミー部材の内部に導線を埋設する必要がないので、構造が簡単であり、安価に製造することができる。なお、上述の実施形態と同様に、立軸ポンプの運転中または運転時の所定の時間にのみ、導通検知器35を動作させることが好ましい。
【0036】
図11は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図1及び図2に示す構成と同様であるので、その重複する説明を省略する。
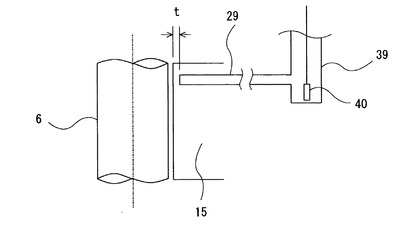
図11に示すように、中空管29の一方の端部は水中軸受15の内部に位置しており、水中軸受15の内周面から所定の距離tだけ離間している。他方の端部は、ポンプケーシング2の外部に配置された貯留部(液体貯留部)39に接続されている。この貯留部39の内部には、水位が所定の値に達したことを検知する水位検知器40が配置されている。貯留部39から水中軸受15まで延びる中空管(連通路)29は、水槽の水面よりも下に位置している。
【0037】
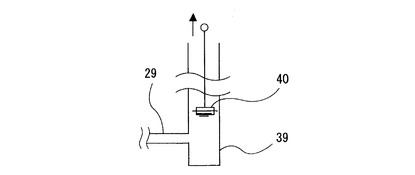
上述の構成において、水中軸受15の摩耗が進み、水中軸受15の内周面が中空管29の先端に達すると、図12に示すように、ポンプケーシング2内部の液体が中空管29を通って貯留部39に導入される。液体が貯留部39に導入されるにつれて、水位が上昇すると、水位検知器40がこれを検知し、水中軸受15の摩耗量が所定の値に達したことを検知することができる。なお、水位検知器40として、水位を連続的に測定する水位センサ、または図13に示すように貯留部39内に配置されたフロートなどを用いてもよい。本実施形態では、中空管29を水中軸受15内に配置したが、図5に示すダミー部材31を水中軸受15に隣接して設け、その内部に中空管29を配置してもよい。
【0038】
図14は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図1及び図2に示す構成と同様であるので、その重複する説明を省略する。
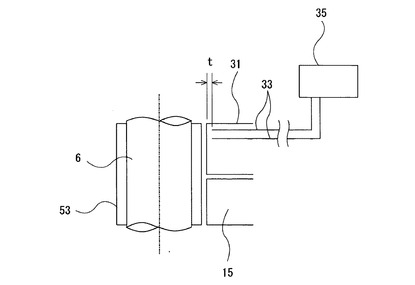
図14に示すように、中空管29の内部には光ファイバーケーブル44が挿入されており、その一方の端部は中空管29の先端近傍に位置し、他方の端部は投光器などの光源45に接続されている。なお、本実施形態では、気体供給部は用いられていない。
【0039】
水中軸受15の摩耗が進み、水中軸受15の内周面が中空管29の先端に達すると、図15に示すように、中空管29の内部に配置された光ファイバーケーブル44から発せられる光がポンプケーシング2内に漏れる。したがって、ハンドホール19(図1参照)から光を視認することにより、水中軸受15の摩耗量が所定の値に達したと判断することができる。この場合も、CCDなどの小型カメラを使用して、光の有無を確認するようにしてもよい。なお、本実施形態においても、図5に示すように、中空管29および光ファイバーケーブル44をダミー部材31に配置してもよい。
【0040】
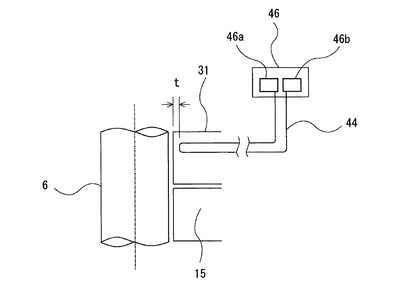
図16は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図1及び図5に示す構成と同様であるので、その重複する説明を省略する。
本実施形態では、図14に示すように、中空管29に代えて、光ファイバーケーブル44がダミー部材31に埋設されている。この光ファイバーケーブル44はポンプケーシング2の外部からダミー部材31の内部にまで延び、さらにダミー部材31の内部で折り返してポンプケーシング2の外部にまで延びている。光ファイバーケーブル44の両端部は、ポンプケーシング2の外部に配置された光検知器46に接続されている。この光検知器46は、光源46aと受光器46bを有しており、光ファイバーケーブル44の一方の端部は光源46aに、他方の端部は受光器46bに接続されている。そして、光源46aから発せられた光は光ファイバーケーブル44を通って受光器46bにより受光されるようになっている。
【0041】
光ファイバーケーブル44がダミー部材31内で折り返す部分(すなわち、光ファイバーケーブル44が回転軸6に最も近づく部分)は、回転軸6の径方向において水中軸受15の内周面から所定の距離tだけ離間した位置にある。このような構成において、水中軸受15とともにダミー部材31が摩耗すると、回転する回転軸6が光ファイバーケーブル44に接触し、光ファイバーケーブル44が断線する。このとき、光検知器46は、断光または光送受信の減衰や波長変位を検知し、光ファイバーケーブル44が断線したことを検知する。このようにして、水中軸受15の摩耗量が所定の値に達したことを検知することができる。なお、光源46aのみを光ファイバーケーブル44の一方の端部に接続し、他方の端部を目視することで光ファイバーケーブル44の断線しているか否かを確認するようにしてもよい。
【0042】
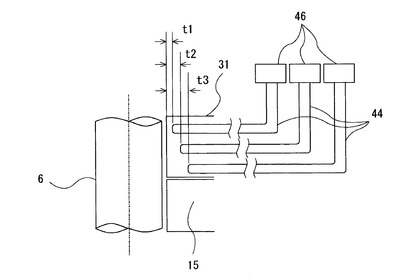
図17に示すように、複数の光ファイバーケーブル44をダミー部材31に設けてもよい。この場合、それぞれの光ファイバーケーブル44のダミー部材31内の折り返し部は、回転軸6の径方向において水中軸受15の内周面から互いに異なった距離(t1,t2,t3)に位置させる。このような構成によれば、水中軸受15の摩耗の進行状況が分かるので、水中軸受15の交換時期を適切に予測することが可能となり、計画的な維持管理を行うことが可能となる。例えば、t3を軸受交換が必要な軸受摩耗量に設定し、t1,t2をt3より小さい寸法(摩耗量)に設定し、対象となる光ファイバーケーブルの断線により、現状の軸受摩耗量を把握し、運転時間等からt3に到達する時間を推測することにより、計画的な予算の計上や交換軸受の事前手配が可能になるとともに、軸受製作期間の分だけ、排水機能停止期間を短くすることができ、信頼性が向上する。
【0043】
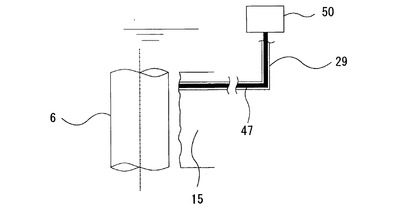
図18は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図14に示す構成と同様であるので、その重複する説明を省略する。
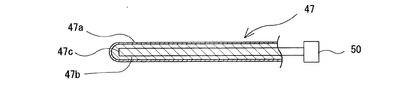
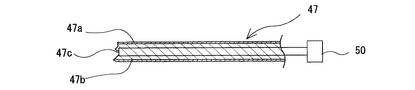
図18に示すように、中空管29の内部にはシースケーブル47が挿入されている。このシースケーブル47は、図19に示すように、シース部(鞘、細管)47aと、該シース部47aにより覆われた絶縁体47bと、該絶縁体47bの中に埋設された1本または複数の導線47cとから基本的に構成されている。シース部47aはステンレススチールまたは銅などの金属から形成され、絶縁体47bはMgOなどから形成されている。このシースケーブル47としては、シース熱電対またはMIケーブル(mineral insulated cable)などの汎用品を用いることができる。
【0044】
図18に示すように、シースケーブル47の一方の端部は中空管29の先端に位置し、他方の端部は検知器50に接続されている。この検知器50は、シースケーブル47のシース部47aが破れ、液体が絶縁体47bに浸入して絶縁性が低下したことを導線47cの電気信号(電流、電圧、抵抗値など)から検知するように構成されている。したがって、水中軸受15の摩耗が進み、図20に示すように、水中軸受15の内周面が中空管29の先端に達すると、図21に示すように、シース部47aが破れ、ポンプケーシング2内の液体が絶縁体47bに浸入し、絶縁性が低下する。検知器50はこれを検知し、シース部47aが破れたこと、すなわち、水中軸受15の摩耗量が所定の値に達したことを検知する。
【0045】
なお、導線47cの電気信号ではなく、図22に示すように、導線47cと絶縁体47bとの間の電気的接続を検知器50が検知するようにしてもよい。シースケーブル47としてシース熱電対を用いる場合は、所定の摩耗量に達するまでの期間、このシース熱電対により水中軸受15の温度を測定するようにしてもよい。この場合は、水中軸受15の温度変化から、水中軸受15の劣化や摩耗状態を推測することが可能となり、傾向管理の精度を上げることが可能となる。なお、本実施形態においても、図5に示すように、中空管29およびシースケーブル47をダミー部材31に配置してもよい。
【0046】
図23は本発明の他の実施形態を示す図であり、回転軸6と垂直な断面を示す図である。なお、特に説明しない本実施形態の構成は図1に示す構成と同様であるので、その重複する説明を省略する。本実施形態においては、図1に示す中空管28,29および空気供給部30は設けられていない。
【0047】
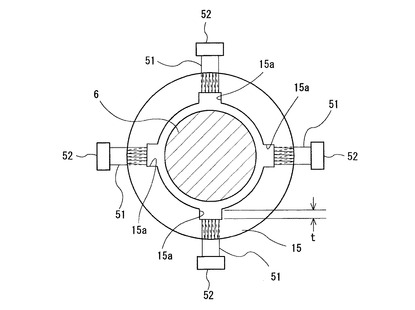
図23に示すように、水中軸受15の内周面に沿って延びる複数の導線51が水中軸受15の内部に埋設されている。これらの導線51は、水中軸受15の内面からの距離がそれぞれ異なるような位置に配置されている。各導線51の両端部は断線検知器52に接続され、導線51が断線したときには断線検知器52がこれを検知するように構成されている。したがって、水中軸受15の摩耗により導線51が断線したことを断線検知器52が検知することによって、水中軸受15の摩耗量が所定の値に達したことを検知することができる。特に、本実施形態によれば、水中軸受15の偏摩耗した場合でも、速やかにこれを検知することができる。なお、図23に示す例では、複数の導線51が配置されているが、1本の導線51のみを配置してもよい。また、図5に示すダミー部材31を水中軸受15に隣接して設け、このダミー部材31に導線51を埋設してもよい。
【0048】
図24は本発明の他の実施形態を示す図であり、回転軸6と垂直な断面を示す図である。なお、特に説明しない本実施形態の構成は図1に示す構成と同様であるので、その重複する説明を省略する。
【0049】
図24に示すように、水中軸受15の内周面には、回転軸6に沿って延びる複数の(図24の例では4つの)凹部15aが形成されている。また、これらの凹部15aが形成されている箇所において、複数の(図24の例では4つの)導線51が水中軸受15に巻き付けられている。各導線51の両端部には断線検知器52が接続されており、導線51が断線したときは断線検知器52がこれを検知するようになっている。水中軸受15に巻き付けられた導線51と水中軸受15の内周面との距離は、上述の実施形態と同様にtに設定されている。
【0050】
上述の構成において、水中軸受15の摩耗が進むと、回転軸6が導線51に接触し、導線51が切断される。断線検知器52は、導線51が切れたことを検知し、これにより水中軸受15の摩耗量が所定の値に達したと判断することができる。
【0051】
水中軸受15に巻き付けられた導線51と水中軸受15の内周面との距離tは、凹部15aの深さに対応する。一般に、水中軸受15の内周面に凹部15aを形成することは、水中軸受15に細い長孔(例えば直径数ミリ以下の微小な長孔)を形成する場合に比べ、比較的容易に、かつ精度よく行うことができる。したがって、本実施形態は、距離tを正確に設定することができるという利点がある。
【0052】
図25は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図1及び図5に示す構成と同様であるので、その重複する説明を省略する。
図25に示すように、水中軸受15およびダミー部材31に対向する位置において、回転軸6の外周面にスリーブ53が固定されている。このスリーブ53の硬度は水中軸受15の硬度以下であり、かつダミー部材31の硬度よりも高い。水中軸受15の材料には硬度の高いセラミックスなどが用いられている。
【0053】
このような構成では、水中軸受15ではなく、回転側のスリーブ53が摩耗する。この場合、スリーブ53は、水中軸受15に対面する部分のみが摩耗する。さらに、スリーブ53が摩耗するに従って、回転するスリーブ53との接触によりダミー部材31が摩耗する。すなわち、スリーブ53が回転するにつれて、スリーブ53が摩耗し、それと同じ程度でダミー部材31が摩耗する。換言すれば、ダミー部材31の摩耗量はスリーブ53の摩耗量に対応している。したがって、上述の例と同様に、気泡の発生または有色の気体を視認することにより、スリーブ53の摩耗量が所定の値に達したことを検知することができる。なお、本実施形態を、ダミー部材を用いる他の実施形態にも適用することができる。例えば、図26は、本実施形態を図8に示す実施形態に適用した例を示す図である。このように、上述した実施形態は適宜組み合わせることができる。
【0054】
これまで本発明の一実施形態について説明したが、本発明は上述の実施形態に限定されず、その技術的思想の範囲内において種々異なる形態にて実施されてよいことは言うまでもない。例えば、本発明は、立軸ポンプに限らす、横軸ポンプや斜軸ポンプにも適用することができる。
【符号の説明】
【0055】
1 インペラケーシング
1a 吸込ベルマウス
1b ポンプボウル
2 ポンプケーシング
3 吊下管
4 吐出曲管
6 回転軸
7,17 支持部材
10 羽根車
11 外軸受
12,15 水中軸受
13 ボウルブッシュ
14 ガイドベーン
16 駆動軸
18 駆動源
19 ハンドホール
22 ポンプ据付床
23 据付用ベース
24 ポンプ挿通孔
28,29 中空管(連通路)
30 気体供給部
31 ダミー部材
33,34,36 導線
35 導通検知器
37 導体
38 絶縁材
39 貯留部
40 水位検知器
44 光ファイバーケーブル
45 光源
46 光検知器
47 シースケーブル
47a シース部
47b 絶縁体
47c 導線
50 検知器
51 導線
52 断線検知器
53 スリーブ
【技術分野】
【0001】
本発明は、河川水や排水などの液体を揚水するポンプに関する。
【背景技術】
【0002】
一般に、立軸ポンプは、水槽上部のポンプ据付床に設置され、吊下管を介して羽根車を収容するインペラケーシングが水槽内に吊り下げられる。このような立軸ポンプでは、羽根車、回転軸などの各部材が水中に浸漬された状態で運転されるため、回転軸を支持する軸受としては、滑り軸受の一種である水中軸受が用いられている。この水中軸受は、運転時間の経過とともに摩耗するため、定期的にポンプを解体して水中軸受の摩耗量を確認し、必要に応じて補修または交換を行うことが必要となる。
【0003】
しかしながら、立軸ポンプを解体し、これを再び組み付ける作業には大変な労力とかなりの日数を要する。そこで、以下の特許文献1,2,3に開示されているように、ポンプを解体せずに水中軸受の摩耗量を測定する方法が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−161790号公報
【特許文献2】特開2004−218578号公報
【特許文献3】特許第3567140号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
例えば、特許文献1には、ヘッドタンクに貯留された液体の水位の低下を検知することで軸受の摩耗量が所定の値に達したことを検知する立軸ポンプが開示されている。しかしながら、立軸ポンプの軸受は、一般に、10年以上の寿命があることから、ヘッドタンク内の流れのない液体が腐敗し、異臭を周囲に放つおそれがある。また、特許文献2,3の装置は、空気流量、圧力、振動値などの間接的な物理量を測定することで軸受の摩耗量を推定するものであり、定量的な摩耗量を検知する場合の信頼性が低い。
【0006】
本発明は、上述した従来の問題点に鑑みてなされたもので、安価で、信頼性が高く、しかも安全に軸受の定量的な摩耗量を検出することができるポンプを提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した目的を達成するために、本発明の一態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された導通検知器と、前記軸受に隣接して配置された1対の導体と、前記1対の導体の間に挟まれた絶縁材と、前記導通検知器と前記1対の導体とに接続される1対の導線とを備え、前記1対の導体の端部は、前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0008】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された導通検知器と、前記導通検知器から前記軸受まで延びる1対の導線とを備え、前記1対の導線の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0009】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された検知器と、前記ポンプケーシングの外部から前記軸受まで延びる少なくとも1つの連通路と、前記検知器に接続され、前記連通路内を延びるシースケーブルとを備え、前記シースケーブルは、シース部と、該シース部により覆われた絶縁体と、該絶縁体の中に埋設された1本または複数の導線とを有し、前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間しており、前記シースケーブルの先端は、前記連通路の先端に位置していることを特徴とするポンプである。
【0010】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部から前記軸受まで延びる連通路と、前記連通路内を延びる光ファイバーケーブルと、前記光ファイバーケーブルに接続された光源とを備え、前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間しており、前記光ファイバーケーブルの先端は、前記連通路の先端の近傍に位置していることを特徴とするポンプである。
【0011】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された光源と、前記軸受に隣接して配置されたダミー部材と、前記光源から前記ダミー部材の内部まで延び、さらに前記ポンプケーシングの外部まで延びる少なくとも1本の光ファイバーケーブルとを備え、前記ダミー部材の内部を延びる前記光ファイバーケーブルが前記回転軸に最も近づく部分は、前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0012】
本発明の他の態様は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された液体貯留部と、前記液体貯留部から前記軸受まで延びる連通路とを備え、前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0013】
本発明の一参考例は、羽根車と、前記羽根車を回転させる回転軸と、前記羽根車および前記回転軸を収容するポンプケーシングと、前記回転軸を回転自在に支持する滑り接触面を有する軸受と、前記ポンプケーシングの外部に配置された気体供給部と、前記気体供給部から前記軸受まで延びる少なくとも1つの連通路とを備え、前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプである。
【0014】
本参考例の好ましい形態は、前記気体供給部は、有色の気体を前記連通路に供給することを特徴とする。
本参考例の好ましい形態は、前記連通路の先端は前記ダミー部材の内部に位置し、前記ダミー部材および前記軸受に対向するように前記回転軸上にスリーブを設け、前記スリーブの硬度は前記軸受の硬度以下であり、かつ前記ダミー部材の硬度よりも高いことを特徴とする。
【発明の効果】
【0015】
本発明によれば、軸受の定量的な摩耗量を精度よく検出することができるポンプを提供することができる。
【図面の簡単な説明】
【0016】
【図1】図1は本発明の第1の実施形態である立軸ポンプの全体構成を示す断面図である。
【図2】図1に示す水中軸受および中空管を示す拡大図である。
【図3】水中軸受の摩耗が進んだ状態を示す図である。
【図4】供給気体として煙を用いた場合を示す図である。
【図5】本実施形態の他の構成例を示す図である。
【図6】本実施形態の他の構成例を示す図である。
【図7】本発明の他の実施形態を示す図である。
【図8】本実施形態の他の構成例を示す図である。
【図9】本実施形態の他の構成例を示す図である。
【図10】本発明の他の実施形態を示す図である。
【図11】本発明の他の実施形態を示す図である。
【図12】水中軸受の摩耗が進んだ状態を示す図である。
【図13】本実施形態の他の構成例を示す図である。
【図14】本発明の他の実施形態を示す図である。
【図15】水中軸受の摩耗が進んだ状態を示す図である。
【図16】本発明の他の実施形態を示す図である。
【図17】本実施形態の他の構成例を示す図である。
【図18】本発明の他の実施形態を示す図である。
【図19】シースケーブルを示す拡大断面図である。
【図20】水中軸受の摩耗が進んだ状態を示す図である。
【図21】シースケーブルのシース部が破れた状態を示す拡大断面図である。
【図22】本実施形態の他の構成例を示す図である。
【図23】本発明の他の実施形態を示す図である。
【図24】本発明の他の実施形態を示す図である。
【図25】本発明の他の実施形態を示す図である。
【図26】本実施形態の他の構成例を示す図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について図面を参照しながら説明する。
図1は本発明の実施形態である立軸ポンプの全体構成を示す断面図である。
図1に示すように、立軸ポンプは、吸込ベルマウス1a及びポンプボウル1bを有するインペラケーシング1と、インペラケーシング1を水槽内に吊り下げる吊下管3と、吊下管3の上端に接続される吐出曲管4と、インペラケーシング1内に収容される羽根車10と、羽根車10が固定される金属製の回転軸6とを備えている。吊下管3は、水槽上部のポンプ据付床22に形成された挿通孔24を通して下方に延び、吊下管3の上端に設けられた据付用ベース23を介してポンプ据付床22に固定される。回転軸(立軸)6は、吐出曲管4、吊下管3、及びインペラケーシング1内を通って鉛直方向に延びている。なお、インペラケーシング1及び吊下管3によりポンプケーシング2が構成される。
【0018】
吸込ベルマウス1aは下方を向いて開口し、吸込ベルマウス1aの上端はポンプボウル1bの下端に固定されている。羽根車10は回転軸6の下端に固定されており、羽根車10と回転軸6とは一体的に回転するようになっている。この羽根車10の上方(吐出側)には複数のガイドベーン14が配置されている。これらのガイドベーン14はポンプボウル1bの内周面に固定されている。回転軸6は外軸受11および水中軸受12,15により回転自在に支持されている。水中軸受12はポンプボウル1bに収容されており、水中軸受15は吊下管3に収容されている。水中軸受12を支持する支持部材7はボウルブッシュ13の内面に固定されており、さらに、ボウルブッシュ13はガイドベーン14を介してインペラケーシング1に支持されている。また、水中軸受15を支持する支持部材17は、吊下管3の内周面に固定されている。水中軸受12,15は、回転軸6に滑り接触する、いわゆる滑り軸受である。
【0019】
図1に示すように、回転軸6は吐出曲管4から上方に突出している。回転軸6の上端は駆動軸16に連結されており、駆動軸16は駆動源18に連結されている。駆動源18により回転軸6を介して羽根車10を回転させると、水槽内の水(取扱液)が吸込ベルマウス1aから吸い込まれ、ポンプボウル1b、吊下管3、吐出曲管4を通って図示しない吐出配管に移送される。なお、立軸ポンプ運転時においては、羽根車10や水中軸受12を収容するインペラケーシング1は、水面よりも下に位置している。
【0020】
吐出曲管4、吊下管3、及びインペラケーシング1の側方には、中空管(連通路)28が設けられている。この中空管28は、ポンプボウル1b、ガイドベーン14、及びボウルブッシュ13を貫通し、その端部は水中軸受12の内部に位置している。他方の端部は、ポンプ据付床22の上方に位置している。同様に、吐出曲管4及び吊下管3の側方には、中空管(連通路)29が設けられている。この中空管29は吊下管3を貫通し、その端部は水中軸受15の内部に位置している。他方の端部は、ポンプ据付床22の上方に位置している。これら中空管28,29の上方の端部は、いずれも気体供給部(例えば、コンプレッサ、ピストン)30に接続されている。
【0021】
図2は図1に示す水中軸受15および中空管29を示す拡大図であり、図3は水中軸受15の摩耗が進んだ状態を示す図である。なお、以下の説明では、水中軸受15および中空管29のみについて説明するが、水中軸受12および中空管28についても同様であるので重複する説明を省略する。
【0022】
図2に示すように、中空管29の先端は水中軸受15の内部に位置しており、水中軸受15の内周面(回転軸6との接触面)から回転軸6の径方向において所定の距離tだけ離間している。この距離tは、検知すべき水中軸受15の摩耗量に応じて決定される。
【0023】
立軸ポンプの運転中は、回転軸6は水中軸受15の内周面と滑り接触するため、ポンプの運転時間の経過とともに水中軸受15の摩耗が進み、やがて水中軸受15の内周面(滑り接触面)が中空管29の先端に達する。そうすると、ポンプケーシング2の内部と中空管29が連通し、図3に示すように、気体供給部30から送られてくる気体(例えば、空気)がポンプケーシング2の内部に導入され、気泡となって浮上する。ポンプ運転停止時には、水槽中の水位は、通常、水中軸受15よりも上方に位置しているので、気泡の発生をハンドホール19(図1参照)から目視により確認することができる。したがって、水中軸受15の摩耗量が所定の値に達したと判断することができる。この場合、CCDなどの小型カメラを使用して、気泡の発生を確認するようにしてもよい。中空管29の材料は、水中軸受15の材料よりも摩耗しやすいものが使用される。なお、水中軸受15の内部に位置する中空管29の部分のみを、水中軸受15に形成された孔により構成してもよい。
【0024】
中空管29に導入される気体として、有色の気体(例えば煙)を用いることができる。この場合は、ポンプ運転が停止しているときに、水槽中の水位が水中軸受15よりも下方にある場合であっても、図4に示すように、有色の気体を目視することによって水中軸受15の摩耗を確認することができる。このように、気体を用いて確認できる構成としたことにより、液体を用いる公知の構成のような液体の腐敗のおそれがなく、環境性、維持管理性に優れた設備とすることが可能となる。
【0025】
図5は本実施形態の他の構成例を示す図である。図5に示すように、中空管29は、水中軸受15に隣接する環状のダミー部材31に埋設されている。このダミー部材31は、水中軸受15と同心上に配置され、水中軸受15の内径と等しい内径またはそれ以上の内径を有している。さらに、ダミー部材31は、水中軸受15よりも硬度が低い(すなわち摩耗しやすい)材料、例えばプラスチックなどから形成されている。中空管29の先端は、上述の例と同様に、水中軸受15の内周面から所定の距離tだけ離間している。
【0026】
水中軸受15が摩耗すると、回転軸6の振れにより、同時にダミー部材31が摩耗する。ダミー部材31の摩耗が進むと、やがて中空管29がポンプケーシング2の内部と連通し、気体供給部30から気体がポンプケーシング2の内部に導入される。このダミー部材31の摩耗量は水中軸受15の摩耗量と概ね等しいので、上述の例と同様に、気泡の発生または有色の気体を視認することにより、水中軸受15の摩耗量が所定の値に達したことを検知することができる。
【0027】
なお、図6に示すように、複数の中空管29a,29b,29cを設けてもよい。なお、図示しているのは3本の中空管であるが、中空管は3本より多くてもかまわない。この場合は、それぞれの中空管29a,29b,29cの先端と水中軸受15の内周面との距離t1,t2,t3は互いに異なるように設定する。このような構成によれば、水中軸受15の摩耗の進行状況が分かるので、水中軸受15の交換時期を適切に予測することが可能となり、計画的な維持管理を行うことが可能となる。例えば、t3を軸受交換が必要な軸受摩耗量に設定し、t1,t2をt3より小さい寸法(摩耗量)に設定し、対象となる中空管への気体供給により、現状の軸受摩耗量を把握し、運転時間等からt3に到達する時間を推測することにより、計画的な予算の計上や交換軸受の事前手配が可能になるとともに、軸受製作期間の分だけ、排水機能停止期間を短くすることができ、信頼性が向上する。
【0028】
図7は、本発明の他の実施形態を示す図である。なお、特に説明しない構成は上述した実施形態と同様であるので、その重複する説明を省略する。
図7に示すように、ダミー部材31の内部には1対の導線33が配置されている。本実施形態においては、ダミー部材31は絶縁材から形成されており、これらの導線33は互いに電気的に非接触に保たれている。それぞれの導線33の一方の端部は水中軸受15の内周面から回転軸6の径方向において距離tだけ離間した位置にあり、他方の端部は導通検知器35に接続されている。なお、本実施形態においては、図1に示す中空管28,29に代えて導線33が、空気供給部30に代えて導通検知器35が設けられている。
【0029】
この構成において、ダミー部材31が摩耗して導線33の先端がダミー部材31の内周面上に露出すると、金属製の回転軸6やポンプケーシング2内の水によりこれら1対の導線33が電気的に接続される。したがって、導通検知器35が導線33の電気的接続を検知することにより、水中軸受15の摩耗量が所定の値に達したことを検知することができる。なお、本実施形態において、水中軸受15内に導線33を配置してもよい。
【0030】
上述した特許文献1には、導線に電流を流し、回転軸により導線が切断されたことを検知することにより水中軸受の摩耗を検知する構成が開示されている。しかしながら、この構成では、導線の材質や配置によっては、摩耗量が所定の値に達していても、完全な断線に至らない場合があり、信頼性に劣る。本実施形態によれば、導線33の端部がダミー部材31の内周面上に露出すれば導通検知器35が導線33の電気的接続を検知することが可能であり、検知の信頼性を高めることができる。また、導線33が接続されたときにのみ電流が流れることになるので、常時電流を流す必要がある特許文献1の構成に比べてエネルギーを節約することができる。
【0031】
図8に示すように、1対の導線33に加えて、複数の導線34をダミー部材31に埋設してもよい(図8の例では3本であるが、3本より多くてもかまわない)。この例では、追加された導線34の先端と水中軸受15の内周面との距離t2,t3,t4は互いに異なり、かつ、導線34の先端は上述した1対の導線33の先端よりも回転軸6の径方向において外側に位置している。このような構成によれば、水中軸受15の摩耗の進行状況が分かるので、水中軸受15の交換時期を適切に予測することが可能となり、計画的な維持管理を行うことが可能となる。例えば、t3を軸受交換が必要な軸受摩耗量に設定し、t1,t2をt3より小さい寸法(摩耗量)に設定し、対象となる導線の導通検知により、現状の軸受摩耗量を把握し、運転時間等からt3に到達する時間を推測することにより、計画的な予算の計上や交換軸受の事前手配が可能になるとともに、軸受製作期間の分だけ、排水機能停止期間を短くすることができ、信頼性が向上する。
【0032】
さらに、図9に示すように、図8に示す構成(複数の導線33,34および導通検知器35)を、回転軸6の周方向において複数設けてもよい。このような構成によれば、一部の導線33,34または導通検知器35が故障した場合でも、他の導線33,34または導通検知器35により水中軸受15の摩耗を検知することができる。また、水中軸受15が偏摩耗しているかどうか、および水中軸受15が周方向に均等に摩耗しているかどうかを判断することができる。なお、図9の例では、4組の導線33,34および導通検知器35を配置しているが、2組、3組、または4組よりも多い導線および導通検知器を配置してもよい。
【0033】
本実施形態において、立軸ポンプの運転中または運転時の所定の時間にのみ、導通検知器35を動作させることが好ましい。その理由は次の通りである。水中軸受15が摩耗して、例えば、図8のt2とt3との間に内周面が位置するとき、一部の導線33,34同士は電気的に接続されているので、これらの導線には電流が流れることになる。しかし、この種の立軸ポンプは、年間数十時間程度しか運転されないため、導電33,34に電流が流れるままにしておくと、ポンプの停止中にも電流が消費され、エネルギーの無駄となる。さらに、導線33,34を流れる電流が腐食電流としてポンプケーシング2などの部材に作用し、これらの部材を腐食させるおそれもある。このような理由から、立軸ポンプの運転中または運転時の所定の時間にのみ、導通検知器35を動作させることが好ましい。
【0034】
図10は本発明の他の実施形態を示す図である。本実施形態の基本的構成は図7に示す構成と同様であるので、その重複する説明を省略する。
図10に示すように、1対の導線36の先端には棒状または板状の1対の導体37がそれぞれ接続されており、これらの導体37は水中軸受15に隣接して配置されている。導体37の間には絶縁材38が配置されており、導体37は互いに電気的に非接触となっている。これらの導体37は、その端部が水中軸受15の内周面よりも回転軸6の径方向において所定の距離tだけ外側に位置するように配置されている。
【0035】
本実施形態においても、水中軸受15が摩耗すると、回転軸6を介してこれら1対の導体37が電気的に接続される。したがって、導通検知器35が導体37の電気的接続または導体37と回転軸6との電気的接続を検知することにより、水中軸受15の摩耗量が所定の値に達したことを検知することができる。本実施形態の構成は、図7の実施形態のようにダミー部材の内部に導線を埋設する必要がないので、構造が簡単であり、安価に製造することができる。なお、上述の実施形態と同様に、立軸ポンプの運転中または運転時の所定の時間にのみ、導通検知器35を動作させることが好ましい。
【0036】
図11は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図1及び図2に示す構成と同様であるので、その重複する説明を省略する。
図11に示すように、中空管29の一方の端部は水中軸受15の内部に位置しており、水中軸受15の内周面から所定の距離tだけ離間している。他方の端部は、ポンプケーシング2の外部に配置された貯留部(液体貯留部)39に接続されている。この貯留部39の内部には、水位が所定の値に達したことを検知する水位検知器40が配置されている。貯留部39から水中軸受15まで延びる中空管(連通路)29は、水槽の水面よりも下に位置している。
【0037】
上述の構成において、水中軸受15の摩耗が進み、水中軸受15の内周面が中空管29の先端に達すると、図12に示すように、ポンプケーシング2内部の液体が中空管29を通って貯留部39に導入される。液体が貯留部39に導入されるにつれて、水位が上昇すると、水位検知器40がこれを検知し、水中軸受15の摩耗量が所定の値に達したことを検知することができる。なお、水位検知器40として、水位を連続的に測定する水位センサ、または図13に示すように貯留部39内に配置されたフロートなどを用いてもよい。本実施形態では、中空管29を水中軸受15内に配置したが、図5に示すダミー部材31を水中軸受15に隣接して設け、その内部に中空管29を配置してもよい。
【0038】
図14は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図1及び図2に示す構成と同様であるので、その重複する説明を省略する。
図14に示すように、中空管29の内部には光ファイバーケーブル44が挿入されており、その一方の端部は中空管29の先端近傍に位置し、他方の端部は投光器などの光源45に接続されている。なお、本実施形態では、気体供給部は用いられていない。
【0039】
水中軸受15の摩耗が進み、水中軸受15の内周面が中空管29の先端に達すると、図15に示すように、中空管29の内部に配置された光ファイバーケーブル44から発せられる光がポンプケーシング2内に漏れる。したがって、ハンドホール19(図1参照)から光を視認することにより、水中軸受15の摩耗量が所定の値に達したと判断することができる。この場合も、CCDなどの小型カメラを使用して、光の有無を確認するようにしてもよい。なお、本実施形態においても、図5に示すように、中空管29および光ファイバーケーブル44をダミー部材31に配置してもよい。
【0040】
図16は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図1及び図5に示す構成と同様であるので、その重複する説明を省略する。
本実施形態では、図14に示すように、中空管29に代えて、光ファイバーケーブル44がダミー部材31に埋設されている。この光ファイバーケーブル44はポンプケーシング2の外部からダミー部材31の内部にまで延び、さらにダミー部材31の内部で折り返してポンプケーシング2の外部にまで延びている。光ファイバーケーブル44の両端部は、ポンプケーシング2の外部に配置された光検知器46に接続されている。この光検知器46は、光源46aと受光器46bを有しており、光ファイバーケーブル44の一方の端部は光源46aに、他方の端部は受光器46bに接続されている。そして、光源46aから発せられた光は光ファイバーケーブル44を通って受光器46bにより受光されるようになっている。
【0041】
光ファイバーケーブル44がダミー部材31内で折り返す部分(すなわち、光ファイバーケーブル44が回転軸6に最も近づく部分)は、回転軸6の径方向において水中軸受15の内周面から所定の距離tだけ離間した位置にある。このような構成において、水中軸受15とともにダミー部材31が摩耗すると、回転する回転軸6が光ファイバーケーブル44に接触し、光ファイバーケーブル44が断線する。このとき、光検知器46は、断光または光送受信の減衰や波長変位を検知し、光ファイバーケーブル44が断線したことを検知する。このようにして、水中軸受15の摩耗量が所定の値に達したことを検知することができる。なお、光源46aのみを光ファイバーケーブル44の一方の端部に接続し、他方の端部を目視することで光ファイバーケーブル44の断線しているか否かを確認するようにしてもよい。
【0042】
図17に示すように、複数の光ファイバーケーブル44をダミー部材31に設けてもよい。この場合、それぞれの光ファイバーケーブル44のダミー部材31内の折り返し部は、回転軸6の径方向において水中軸受15の内周面から互いに異なった距離(t1,t2,t3)に位置させる。このような構成によれば、水中軸受15の摩耗の進行状況が分かるので、水中軸受15の交換時期を適切に予測することが可能となり、計画的な維持管理を行うことが可能となる。例えば、t3を軸受交換が必要な軸受摩耗量に設定し、t1,t2をt3より小さい寸法(摩耗量)に設定し、対象となる光ファイバーケーブルの断線により、現状の軸受摩耗量を把握し、運転時間等からt3に到達する時間を推測することにより、計画的な予算の計上や交換軸受の事前手配が可能になるとともに、軸受製作期間の分だけ、排水機能停止期間を短くすることができ、信頼性が向上する。
【0043】
図18は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図14に示す構成と同様であるので、その重複する説明を省略する。
図18に示すように、中空管29の内部にはシースケーブル47が挿入されている。このシースケーブル47は、図19に示すように、シース部(鞘、細管)47aと、該シース部47aにより覆われた絶縁体47bと、該絶縁体47bの中に埋設された1本または複数の導線47cとから基本的に構成されている。シース部47aはステンレススチールまたは銅などの金属から形成され、絶縁体47bはMgOなどから形成されている。このシースケーブル47としては、シース熱電対またはMIケーブル(mineral insulated cable)などの汎用品を用いることができる。
【0044】
図18に示すように、シースケーブル47の一方の端部は中空管29の先端に位置し、他方の端部は検知器50に接続されている。この検知器50は、シースケーブル47のシース部47aが破れ、液体が絶縁体47bに浸入して絶縁性が低下したことを導線47cの電気信号(電流、電圧、抵抗値など)から検知するように構成されている。したがって、水中軸受15の摩耗が進み、図20に示すように、水中軸受15の内周面が中空管29の先端に達すると、図21に示すように、シース部47aが破れ、ポンプケーシング2内の液体が絶縁体47bに浸入し、絶縁性が低下する。検知器50はこれを検知し、シース部47aが破れたこと、すなわち、水中軸受15の摩耗量が所定の値に達したことを検知する。
【0045】
なお、導線47cの電気信号ではなく、図22に示すように、導線47cと絶縁体47bとの間の電気的接続を検知器50が検知するようにしてもよい。シースケーブル47としてシース熱電対を用いる場合は、所定の摩耗量に達するまでの期間、このシース熱電対により水中軸受15の温度を測定するようにしてもよい。この場合は、水中軸受15の温度変化から、水中軸受15の劣化や摩耗状態を推測することが可能となり、傾向管理の精度を上げることが可能となる。なお、本実施形態においても、図5に示すように、中空管29およびシースケーブル47をダミー部材31に配置してもよい。
【0046】
図23は本発明の他の実施形態を示す図であり、回転軸6と垂直な断面を示す図である。なお、特に説明しない本実施形態の構成は図1に示す構成と同様であるので、その重複する説明を省略する。本実施形態においては、図1に示す中空管28,29および空気供給部30は設けられていない。
【0047】
図23に示すように、水中軸受15の内周面に沿って延びる複数の導線51が水中軸受15の内部に埋設されている。これらの導線51は、水中軸受15の内面からの距離がそれぞれ異なるような位置に配置されている。各導線51の両端部は断線検知器52に接続され、導線51が断線したときには断線検知器52がこれを検知するように構成されている。したがって、水中軸受15の摩耗により導線51が断線したことを断線検知器52が検知することによって、水中軸受15の摩耗量が所定の値に達したことを検知することができる。特に、本実施形態によれば、水中軸受15の偏摩耗した場合でも、速やかにこれを検知することができる。なお、図23に示す例では、複数の導線51が配置されているが、1本の導線51のみを配置してもよい。また、図5に示すダミー部材31を水中軸受15に隣接して設け、このダミー部材31に導線51を埋設してもよい。
【0048】
図24は本発明の他の実施形態を示す図であり、回転軸6と垂直な断面を示す図である。なお、特に説明しない本実施形態の構成は図1に示す構成と同様であるので、その重複する説明を省略する。
【0049】
図24に示すように、水中軸受15の内周面には、回転軸6に沿って延びる複数の(図24の例では4つの)凹部15aが形成されている。また、これらの凹部15aが形成されている箇所において、複数の(図24の例では4つの)導線51が水中軸受15に巻き付けられている。各導線51の両端部には断線検知器52が接続されており、導線51が断線したときは断線検知器52がこれを検知するようになっている。水中軸受15に巻き付けられた導線51と水中軸受15の内周面との距離は、上述の実施形態と同様にtに設定されている。
【0050】
上述の構成において、水中軸受15の摩耗が進むと、回転軸6が導線51に接触し、導線51が切断される。断線検知器52は、導線51が切れたことを検知し、これにより水中軸受15の摩耗量が所定の値に達したと判断することができる。
【0051】
水中軸受15に巻き付けられた導線51と水中軸受15の内周面との距離tは、凹部15aの深さに対応する。一般に、水中軸受15の内周面に凹部15aを形成することは、水中軸受15に細い長孔(例えば直径数ミリ以下の微小な長孔)を形成する場合に比べ、比較的容易に、かつ精度よく行うことができる。したがって、本実施形態は、距離tを正確に設定することができるという利点がある。
【0052】
図25は本発明の他の実施形態を示す図である。なお、特に説明しない本実施形態の構成は図1及び図5に示す構成と同様であるので、その重複する説明を省略する。
図25に示すように、水中軸受15およびダミー部材31に対向する位置において、回転軸6の外周面にスリーブ53が固定されている。このスリーブ53の硬度は水中軸受15の硬度以下であり、かつダミー部材31の硬度よりも高い。水中軸受15の材料には硬度の高いセラミックスなどが用いられている。
【0053】
このような構成では、水中軸受15ではなく、回転側のスリーブ53が摩耗する。この場合、スリーブ53は、水中軸受15に対面する部分のみが摩耗する。さらに、スリーブ53が摩耗するに従って、回転するスリーブ53との接触によりダミー部材31が摩耗する。すなわち、スリーブ53が回転するにつれて、スリーブ53が摩耗し、それと同じ程度でダミー部材31が摩耗する。換言すれば、ダミー部材31の摩耗量はスリーブ53の摩耗量に対応している。したがって、上述の例と同様に、気泡の発生または有色の気体を視認することにより、スリーブ53の摩耗量が所定の値に達したことを検知することができる。なお、本実施形態を、ダミー部材を用いる他の実施形態にも適用することができる。例えば、図26は、本実施形態を図8に示す実施形態に適用した例を示す図である。このように、上述した実施形態は適宜組み合わせることができる。
【0054】
これまで本発明の一実施形態について説明したが、本発明は上述の実施形態に限定されず、その技術的思想の範囲内において種々異なる形態にて実施されてよいことは言うまでもない。例えば、本発明は、立軸ポンプに限らす、横軸ポンプや斜軸ポンプにも適用することができる。
【符号の説明】
【0055】
1 インペラケーシング
1a 吸込ベルマウス
1b ポンプボウル
2 ポンプケーシング
3 吊下管
4 吐出曲管
6 回転軸
7,17 支持部材
10 羽根車
11 外軸受
12,15 水中軸受
13 ボウルブッシュ
14 ガイドベーン
16 駆動軸
18 駆動源
19 ハンドホール
22 ポンプ据付床
23 据付用ベース
24 ポンプ挿通孔
28,29 中空管(連通路)
30 気体供給部
31 ダミー部材
33,34,36 導線
35 導通検知器
37 導体
38 絶縁材
39 貯留部
40 水位検知器
44 光ファイバーケーブル
45 光源
46 光検知器
47 シースケーブル
47a シース部
47b 絶縁体
47c 導線
50 検知器
51 導線
52 断線検知器
53 スリーブ
【特許請求の範囲】
【請求項1】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された導通検知器と、
前記軸受に隣接して配置された1対の導体と、
前記1対の導体の間に挟まれた絶縁材と、
前記導通検知器と前記1対の導体とに接続される1対の導線とを備え、
前記1対の導体の端部は、前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプ。
【請求項2】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された導通検知器と、
前記導通検知器から前記軸受まで延びる1対の導線とを備え、
前記1対の導線の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプ。
【請求項3】
前記1対の導線に加え、さらに少なくとも1本の導線を配置し、前記少なくとも1本の導線の先端は、前記1対の導線の先端よりも前記回転軸の径方向において外側に位置していることを特徴とする請求項2に記載のポンプ。
【請求項4】
前記1対の導線の先端は前記ダミー部材の内部に位置し、
前記ダミー部材および前記軸受に対向するように前記回転軸上にスリーブを設け、
前記スリーブの硬度は前記軸受の硬度以下であり、かつ前記ダミー部材の硬度よりも高いことを特徴とする請求項2または3に記載のポンプ。
【請求項5】
前記導通検知器は前記ポンプが運転している間にのみ作動することを特徴とする請求項2乃至4のいずれか一項に記載のポンプ。
【請求項6】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された検知器と、
前記ポンプケーシングの外部から前記軸受まで延びる少なくとも1つの連通路と、
前記検知器に接続され、前記連通路内を延びるシースケーブルとを備え、
前記シースケーブルは、シース部と、該シース部により覆われた絶縁体と、該絶縁体の中に埋設された1本または複数の導線とを有し、
前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間しており、
前記シースケーブルの先端は、前記連通路の先端に位置していることを特徴とするポンプ。
【請求項7】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部から前記軸受まで延びる連通路と、
前記連通路内を延びる光ファイバーケーブルと、
前記光ファイバーケーブルに接続された光源とを備え、
前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間しており、
前記光ファイバーケーブルの先端は、前記連通路の先端の近傍に位置していることを特徴とするポンプ。
【請求項8】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された光源と、
前記軸受に隣接して配置されたダミー部材と、
前記光源から前記ダミー部材の内部まで延び、さらに前記ポンプケーシングの外部まで延びる少なくとも1本の光ファイバーケーブルとを備え、
前記ダミー部材の内部を延びる前記光ファイバーケーブルが前記回転軸に最も近づく部分は、前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプ。
【請求項9】
前記光ファイバーケーブルの一方の端部に接続される受光器をさらに備えたことを特徴とする請求項8に記載のポンプ。
【請求項10】
前記少なくとも1本の光ファイバーケーブルは、複数の光ファイバーケーブルであり、
前記複数の光ファイバーケーブルが前記回転軸に最も近づく部分と前記滑り接触面との距離は互いに異なることを特徴とする請求項8または9に記載のポンプ。
【請求項11】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された液体貯留部と、
前記液体貯留部から前記軸受まで延びる連通路とを備え、
前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプ。
【請求項1】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された導通検知器と、
前記軸受に隣接して配置された1対の導体と、
前記1対の導体の間に挟まれた絶縁材と、
前記導通検知器と前記1対の導体とに接続される1対の導線とを備え、
前記1対の導体の端部は、前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプ。
【請求項2】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された導通検知器と、
前記導通検知器から前記軸受まで延びる1対の導線とを備え、
前記1対の導線の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプ。
【請求項3】
前記1対の導線に加え、さらに少なくとも1本の導線を配置し、前記少なくとも1本の導線の先端は、前記1対の導線の先端よりも前記回転軸の径方向において外側に位置していることを特徴とする請求項2に記載のポンプ。
【請求項4】
前記1対の導線の先端は前記ダミー部材の内部に位置し、
前記ダミー部材および前記軸受に対向するように前記回転軸上にスリーブを設け、
前記スリーブの硬度は前記軸受の硬度以下であり、かつ前記ダミー部材の硬度よりも高いことを特徴とする請求項2または3に記載のポンプ。
【請求項5】
前記導通検知器は前記ポンプが運転している間にのみ作動することを特徴とする請求項2乃至4のいずれか一項に記載のポンプ。
【請求項6】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された検知器と、
前記ポンプケーシングの外部から前記軸受まで延びる少なくとも1つの連通路と、
前記検知器に接続され、前記連通路内を延びるシースケーブルとを備え、
前記シースケーブルは、シース部と、該シース部により覆われた絶縁体と、該絶縁体の中に埋設された1本または複数の導線とを有し、
前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間しており、
前記シースケーブルの先端は、前記連通路の先端に位置していることを特徴とするポンプ。
【請求項7】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部から前記軸受まで延びる連通路と、
前記連通路内を延びる光ファイバーケーブルと、
前記光ファイバーケーブルに接続された光源とを備え、
前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間しており、
前記光ファイバーケーブルの先端は、前記連通路の先端の近傍に位置していることを特徴とするポンプ。
【請求項8】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された光源と、
前記軸受に隣接して配置されたダミー部材と、
前記光源から前記ダミー部材の内部まで延び、さらに前記ポンプケーシングの外部まで延びる少なくとも1本の光ファイバーケーブルとを備え、
前記ダミー部材の内部を延びる前記光ファイバーケーブルが前記回転軸に最も近づく部分は、前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプ。
【請求項9】
前記光ファイバーケーブルの一方の端部に接続される受光器をさらに備えたことを特徴とする請求項8に記載のポンプ。
【請求項10】
前記少なくとも1本の光ファイバーケーブルは、複数の光ファイバーケーブルであり、
前記複数の光ファイバーケーブルが前記回転軸に最も近づく部分と前記滑り接触面との距離は互いに異なることを特徴とする請求項8または9に記載のポンプ。
【請求項11】
羽根車と、
前記羽根車を回転させる回転軸と、
前記羽根車および前記回転軸を収容するポンプケーシングと、
前記回転軸を回転自在に支持する滑り接触面を有する軸受と、
前記ポンプケーシングの外部に配置された液体貯留部と、
前記液体貯留部から前記軸受まで延びる連通路とを備え、
前記連通路の先端は、前記軸受の内部、または該軸受に隣接して配置されたダミー部材の内部に位置し、かつ前記滑り接触面から前記回転軸の径方向において所定の距離だけ離間していることを特徴とするポンプ。
【図1】



【図2】

【図3】

【図4】
【図5】
【図6】

【図7】
【図8】

【図9】
【図10】
【図11】
【図12】

【図13】
【図14】

【図15】

【図16】
【図17】
【図18】

【図19】
【図20】
【図21】
【図22】

【図23】

【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2011−256877(P2011−256877A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2011−205774(P2011−205774)
【出願日】平成23年9月21日(2011.9.21)
【分割の表示】特願2006−258853(P2006−258853)の分割
【原出願日】平成18年9月25日(2006.9.25)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【出願人】(506236820)株式会社 荏原由倉ハイドロテック (31)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【分割の表示】特願2006−258853(P2006−258853)の分割
【原出願日】平成18年9月25日(2006.9.25)
【出願人】(000000239)株式会社荏原製作所 (1,477)
【出願人】(506236820)株式会社 荏原由倉ハイドロテック (31)
【Fターム(参考)】
[ Back to top ]