
ポータブルデバイス
【課題】
【解決手段】ポータブルデバイスは、振動を提供するモータ、このモータに動力を供給する動力源、前記モータの方向を制御するスイッチデバイス、面に係合してモータが振動するときにデバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段、及び前記スイッチデバイスに接続されている入力デバイスを具え、前記スイッチデバイスは入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されている。有利なことに、推進手段は一セットの毛を具える。角度を付けた毛を使用することで、後方向の摩擦が増加し、振動したときに前記デバイスを前方へ動かす。振動が物体を後方へ移動させようとすると、この毛が面に食い込み、振動が物体を前方へ移動させようとすると、毛が面上を摺動する。
【解決手段】ポータブルデバイスは、振動を提供するモータ、このモータに動力を供給する動力源、前記モータの方向を制御するスイッチデバイス、面に係合してモータが振動するときにデバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段、及び前記スイッチデバイスに接続されている入力デバイスを具え、前記スイッチデバイスは入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されている。有利なことに、推進手段は一セットの毛を具える。角度を付けた毛を使用することで、後方向の摩擦が増加し、振動したときに前記デバイスを前方へ動かす。振動が物体を後方へ移動させようとすると、この毛が面に食い込み、振動が物体を前方へ移動させようとすると、毛が面上を摺動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は振動モータによって推進するポータブルデバイスに関する。
【背景技術】
【0002】
英国の特許出願公開公報GB2343536は警報装置を開示している。当該装置は例えば携帯電話機であり、第1回転軸を有し、この装置を支持できる面に係合し、モータを具える。当該モータは第2回転軸を有するロータ軸を具える。このモータは装置のユーザに電話の呼び出し又はメッセージの受信などの事象を知らせるように動作する。モータは第2回転軸が第1回転軸にほぼ平行に装置内に配置されており、モータの起動によって回転モーメントが作られて、装置が第1軸を中心に回転する。この明細書に記載されているデバイスは呼び出し受信に応答して、単にその場で回転するのみであり、その動作は極めて限定されている。
【0003】
別の同様のシステムが英国の特許出願公開公報GB2378617に開示されており、これは所定の条件に応答して振動するように設計された携帯機器を示す。当該携帯機器は、携帯電話機でもよく、プロセッサに接続されて、呼び出し受信などの所定の条件に応答して振動するように動作可能な振動デバイスを具える。この振動は下側部に側面を有する外部容器に伝わって、携帯機器が机などの面上に置かれており、この振動デバイスが動作すると、当該振動が携帯機器を面上で動かす。この動きは前記プロセッサによって携帯機器が面上で所定の軌跡を描くように制御されている。携帯機器は手で持てる大きさのゲーム機器、玩具、又はその他の電子機器でもよい。この振動デバイスは、載置面に対して回転軸が垂直であり、軸外に質量体を有する小型の多極コアレスマイクロモータである。この明細書に記載されているデバイスは所定の経路に沿って移動するように動作し、携帯電話機容器の前記下側面がモータ振動のエネルギィを特定方向の動きに伝達しないときには、制御可能な態様で、有効に又は正確に移動しない。これは利用可能な推力又は回転モーメントを最大にするものでもない。
【0004】
それゆえ、本発明の課題は従来技術を改良することである。
【0005】
本発明の第1態様によると、ポータブルデバイスが提供されており、当該ポータブルデバイスは、振動を提供するモータ、このモータに動力を供給する動力源、前記モータの方向を制御するスイッチデバイス、面に係合してモータが振動するときにデバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段、及び前記スイッチデバイスに接続されている入力デバイスを具え、前記スイッチデバイスは入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されている。
【0006】
本発明のこの態様によって、モータが方向を変えると、動きの形態が変わる単純な可動デバイスを提供できる。このデバイスでは、可動部品が最小化されており、様々な異なる入力を用いて前記モータの方向を切りかえることができる。下方に延在しており、垂直方向に角度を成すよう推進手段を設計することによって、前記デバイスが確実に制御可能に移動する。
【0007】
有利なことに、推進手段は一セットの毛を具える。角度を付けた毛を使用することで、後方向の摩擦が増加し、振動したときに前記デバイスを前方へ動かす。振動が物体を後方へ移動させようとすると、この毛が面に食い込み、振動が物体を前方へ移動させようとすると、毛が面上を摺動する。
【0008】
角度付の毛は「後方ストローク」時に撓んでエネルギィを蓄え、前方ストローク時に真っ直ぐになって前記エネルギィを放出するように、特に剛性が選択されており、このことが前記物体を前方へ推進させるのに役立つ。毛が柔軟すぎると、毛がエネルギィを吸収してしまうためエネルギィが無駄になり、毛が固すぎると、毛が撓まないのでエネルギィが蓄えられず、後方ストローク時に逆に後方に物体が進められてしまう。GB2378617に開示されている発明ではこのようなことが起こる。
【0009】
好ましくは、モータ軸は垂直方向及び水平方向に対して角度を成している。モータがある角度で設定されており、振動運動は、面にかかる力が大きくなるため後方向における摩擦が増えて、振動運動が面から離れると、前方向における摩擦が小さくなるように作用する。
【0010】
理想的には、前記モータが重量体を回転させて、この重量体の重心がモータ軸からオフセットしており、この重量体の重心がポータブルデバイスの重心から離れている。角度付モータは当該デバイスの重心から離して下側に配置されており、前記運動の効果を強化している。これはデバイスの重心は静止する傾向にあり、全てのポイントはその周りを回転するからである。
【0011】
移動するオフセット重量体を物体の重心から離して取り付けることにより、回転揺動運動が生じる。この運動は、ユニットが前方へ動くとき旋回運動を起こす。当該ユニットの重心からの重量体の距離を変えることで、ユニットの旋回半径を変えることができる。モータの回転方向を逆にすることで、物体の旋回方向を変えることができる。
【0012】
有利なことに、デバイスはさらに、基部、当該基部に取り付けられたモータ、動力源、及びスイッチデバイスを具え、推進手段が前記基部から下方に延在している。モータは基部に固定して取り付けられており、動力源とスイッチデバイスは基部にフレキシブルに取り付けられている。振動モータは基部に剛性支持体で直接連結されており、端部への振動エネルギィと運動の伝達が最大になるようにしている。ユニットの他の要素、特に重い要素は、可撓性のある台に取り付ける。これは、運動量の保存によって、振動モータに連結しているあらゆる質量が移動量を減らすためである。
【0013】
好ましくは、前記入力デバイスは電磁放射を検出する検出器を具え、前記所定の信号は検出した電磁放射レベルを含む。および/または、入力デバイスが音響を検出する検出器を具え、前記所定の信号が特定の音を含む。ポータブルデバイスは、携帯電話機がデバイスの近くに来ると反応する、又は、指を鳴らすもしくは笛を吹くなど、その他のあらゆる好適な音に反応するように構成することができる。さらなる実施形態では、前記制御手段が光源であり、光源の検出方向を利用して、モータの回転方向を決定するようにしている。
【0014】
本発明の実施形態について例示によって、添付図面を参照して述べる。
【0015】
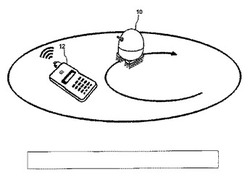
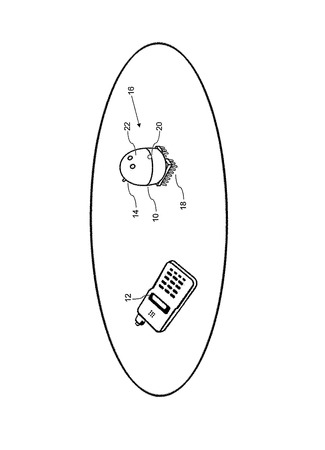
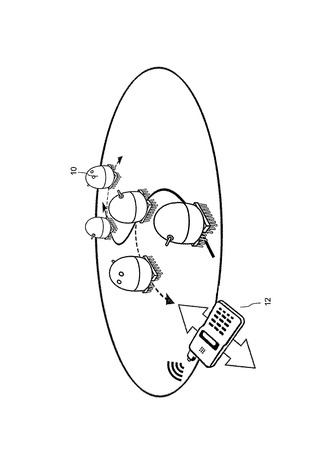
図1にポータブルデバイス10及び携帯電話機12を示す。ポータブルデバイス10は検出器14の形式の入力デバイス14を具え、電磁放射を検出する。検出器14は例えば、携帯電話分野で使用されている無線周波(RF)通信受信用の標準のアンテナである。又、ポータブルデバイス10には出力手段16が設けられており、図1に示すデバイス10では、;この出力手段はポータブルデバイス10を動かすための推進手段18、オーディオ手段20、及び表示手段22の3つの構成要素である。
【0016】
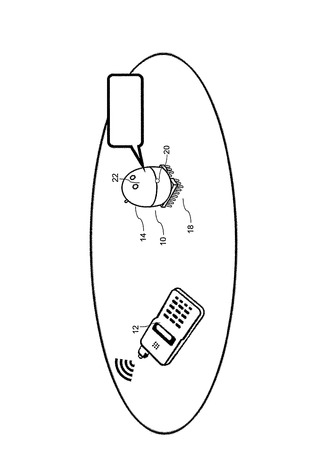
電話機12の音が鳴ると(図2に示すように)、デバイス10は、休眠状態から起動してオーディオ手段20から音を出す(ビーッビーッと音を出す)。次いで、デバイス10がRFを検出している限り、(すなわち、電話機がRFを発しており、範囲内にある限り)、デバイス10はオーディオ手段20から音を出し続ける。
【0017】
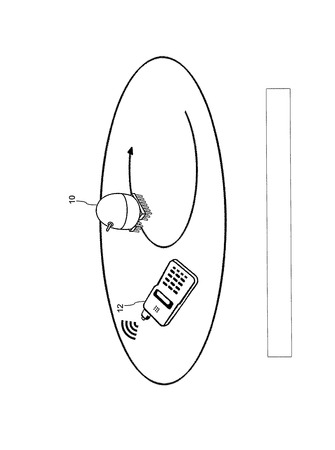
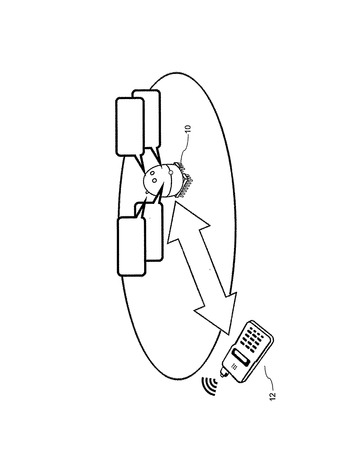
デバイス10は受信したRFのレベルも検出できるので、電話機12が検出器14に大体どの程度近いかを大まかに知らせることができる。従って、図3に示すように、電話機12がデバイス10に近づくと、ポータブルデバイス10が動作モードになる。図4に示すように、デバイス10は、電話機12の近接度を変えることによって操縦できる。簡単なスキームによれば、電話機が近づくとデバイス10は左へ曲がり、電話機が離れると、デバイス10は右へ曲がり、電話機が遠くへ離れるとデバイス10は停止する。所定時間RFを受信しないと、デバイス10は待受モードに戻り、RFの検出を待つ。
【0018】
デバイス10内部には、検出器14と出力手段16に接続されたコントロールデバイスがある。このコントロールデバイス(図7に詳細を示す)は検出器14の出力に応じて出力手段16を制御するためのデバイスである。検出した電磁放射が第1閾値を超えると出力手段16は第1の態様で動作し、検出した電磁放射が第2閾値を超えると出力手段は第2態様で動作し、第1及び第2の態様は互いに異なる。第2閾値は第1閾値より大きい。
【0019】
ユーザが電話中は、デバイス10は応答し続けることが可能であるが、電話機12が終了したら、デバイス10は動作モードになる。電話機12の近接度を変えることによって、ポータブルデバイス10を操縦することができる(又はその他の動作変化が生じるようにする)。電話機12からのRFの発生は、必ずしも呼び出しを行う又は受信することによって生じる必要はなく、ユーザが1111又は別の実在しない番号に電話をかけた場合に、標準の携帯電話が接続しようとしている間、RFを流す、このサービスに対してはユーザに費用がかからない。
【0020】
ポータブルデバイス10は、携帯電話機12の近接度に応じたデバイスの動作(音/動き/光、他)の制御/操縦及び変換に対応している。図5はデバイス10の代替の態様を示し、ここでは携帯電話機12の近接度によってデバイス10のオーディオ手段の動作を変えている。携帯電話機12がデバイス10の近くに来ると、デバイスは動作モードになり、デバイス10から発する音響の特徴が、デバイス10が低レベルのRFを検出したときの音響から変わる。RFの検出レベルが設定閾値を越えると(電話機12がデバイス10に近接していることを示す)、異なるオーディオ出力が使用される。
【0021】
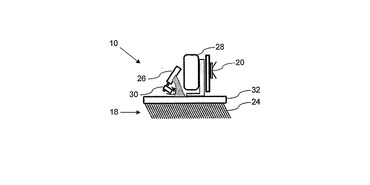
図6はポータブルデバイス10の構成要素をさらに詳細に示す図である。この図には、3つの異なる構成が示されているが、これらの構成はデバイス10を前方に推進する推進手段18として用いる毛24のレイアウトが異なるだけである。ポータブルデバイス10は振動を提供するモータ26、このモータに動力を供給する動力源を具えるユニット28、及びモータの速度と方向を制御するスイッチデバイスを具える。推進手段18は、モータ26の振動時に、デバイスを推進するための手段である。
【0022】
デバイス10を駆動し、操縦するために、モータ26にはオフセット重量体30が設けられている。この重量体30の重心はモータ26の軸からオフセットしている。又、ユニット28はスイッチデバイスに接続された入力デバイスを具え、このスイッチデバイスは入力デバイスが所定の信号を受信するとモータ26の方向を切りかえるように構成されている。デバイス10を前方に駆動する振動を用いて、モータ26の回転方向を変えることで、デバイス10の構造によって、デバイス10が左又は右へ弧状に動き、デバイス10を操縦することができる。
【0023】
モータ26を基部32に直接取り付けることが、毛24への振動の伝達を助け、より一層の前方推力を提供する。角度付の毛24は2つの機能を提供している。すなわち、毛24は後方向の摩擦を大きくして、モータの振動時にデバイス10を前方に動かし、デバイス10が後方に移動しようとするときに、エネルギィを蓄えて、デバイス10が前方に動くときに、そのエネルギィを解放する。これによって円振動をより一層前方への動きに変えることができる。その他の装置(例えば、ミニポーゴスティックなどのばね、又は小さな緩衝装置)もこの前方への移動に利用できる。
【0024】
このように、前方を向いた面に振動が生じるようにモータ26に角度を付けることで、面にあたる力が大きくなり、後方向の摩擦が大きくなる。後方への運きは毛24を圧縮する方向にあるので、より一層のエネルギィが毛24に蓄えられる。この動きが表面から離れていると、前方向の摩擦が減る。
【0025】
移動オフセット重量体30をデバイス10の重心から離して取り付けることで、わずかな回転揺動運動が生じる。この運動によって、デバイス10が前方に動くときに旋回運動が生じる。従って、モータが回転する方向を変えることで、当該物体を操縦することができる。重量体30のデバイス10の重心からの距離を変えることによって、デバイス10の旋回半径を変えることができる。モータ26が重心の近くにあると、デバイス10の動きは直線からわずかに旋回するのに対し、モータ26が重心から離れていると、この動きはどちらかの方向に比較的急に旋回する。
【0026】
モータ、基部及び毛をデバイス10の主重量物(バッテリィなど)から独立して振動させることで、毛/基部がさらに動くようになり、前方へのより早い移動を提供する。ユニットと面との間の接触域はどのような形であってもよい。振動モータ26を垂直方向に対して角度付けることで、推進手段から生じる前方への推力が最大になる。角度付の毛を使用することによって、振動モータ26から前方への動きが生じる。携帯電話機の近接によるデバイス10の操縦を利用して、携帯電話機などのデバイスの近接によって車両を操縦することができる。
【0027】
上述した駆動/操縦方法は、電話などのRF源を用いて制御する必要はない。たとえば、指をならすなどの音響的トリガを用いて、モータの方向(従って、デバイス10の移動方向)を変えることもできる。又、周波数に応答するデバイス10を設けて、ユーザがデバイス10に対して笛を鳴らす又は音楽を流すことで、デバイス10の移動を制御できるようにしてもよい。
【0028】
デバイス10は、電波を送信している携帯電話機の近接によるモータ方向の転換、及び、携帯電話機の近接によるモータの始動と停止に対応している。同様に、電話機の近接によってスピーチ/音響的出力を変化させるというように、デバイスの動作変化が、電話機の近接によって生じるようにしてもよい。
【0029】
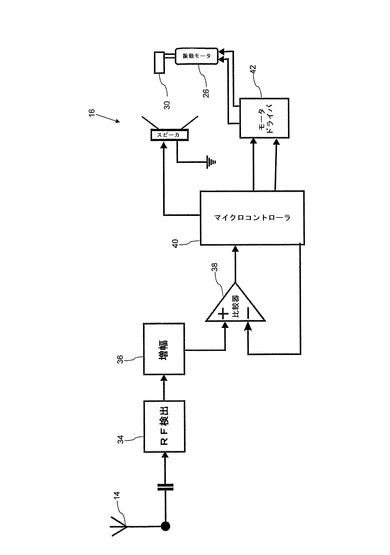
図7は、ポータブルデバイス10で用いる電子回路をさらに詳細に示す。アンテナ14(検出器として機能する)は、RF検出器34、増幅器36及び比較器38を介してコントロールデバイス40に接続されている。コントロールデバイス40は出力手段16(ここではオーディオ手段として示されている)とモータドライバ42と通信する。モータドライバは、モータ30の回転軸からオフセットしている重量体30を具えるモータ26に動力を供給する。
【0030】
周波数範囲900MHz乃至2000MHz(携帯電話機で利用する周波数)の、RFが、RF検出器34によって検出され、増幅されて、携帯電話機をデバイス10近傍で使用中に(使用可能範囲は増幅を変えることで調整できる)、パルス列が比較器38の入力に与えられる。この信号の振幅はアンテナ14に提供されるRFの強さに比例する。基準電圧は比較器38の他方の入力に印可される。次いで、RFの値が基準電圧(閾値)よりも高い又は低いかどうかを決定するために、マイクロコントローラ40によって比較器38の出力を確認する。比較器の基準電圧を変えることで、マイクロコントローラは、携帯電話機12が使用中であるかどうか、使用中であれば、及び携帯電話機が近くにあるか又は遠くにあるかを決定する。代替的に、アナログディジタルコンバータを使用することもできる。
【0031】
このようにして決定した携帯電話機12の近接に基づいて、マイクロコントローラ40が音を出力して、モータ26の回転の状態および/または方向を変える。又、マイクロコントローラ40は入力パルスのタイミングを確認して、RFが携帯電話機からのものであり、無線LAN(WIFI)、マイクロ波又はブルートゥースデバイスなど別のRF源からのものではないかどうかを決定する。
【0032】
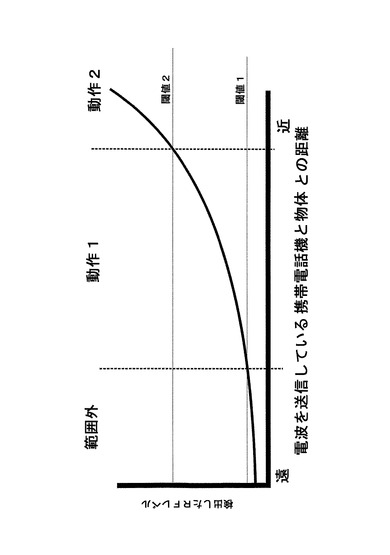
図8は、携帯電話機12がデバイス10に向けて移動したときのRFの検出レベルの変化を示すグラフである。このグラフには閾値1及び2が記載されている。これらの閾値の位置の選択は設計上の選択事項であり、デバイス10で使用されるハードウェア及び電気回路によって異なる。
【0033】
携帯電話機12がデバイス10に向けて移動するときのデバイス10の動きの比例的変化を含めて、複数の閾値と複数のそれに対応する動きを利用できる。例えば、電話機10がデバイス10に向けて移動すると、デバイス10のオーディオ手段からの出力音量が大きくなるようにすることができる。又は、モータの速度を変えるようにしてもよい。この場合、デバイス10は多数のインクリメンタルな閾値を操作して、各デバイス10の動作の変更を決定するように構成できる。
【0034】
デバイス10は、使用中の携帯電話機の距離、又は検出した外部RF信号の強度に基づく振動モータ26方向の転換に対応している。同様に、使用中の携帯電話機への近接、又は検出したRF信号の強度に基づいてデバイス10が弧を描く方向を転換し、デバイス10を操縦できる。又、デバイス10のオーディオ出力は、使用中の携帯電話機の近接に基づいて、又は検出したRF信号の強度によって、出力音量が変わるように構成することもできる。
【0035】
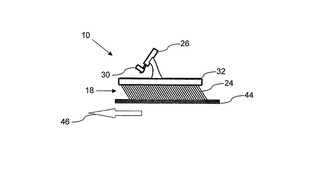
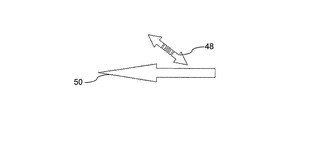
図9は、面44に係合する推進手段18(毛24)を有するポータブルデバイス10を示す。毛24は、モータが振動しているときに、矢印46の方向に前方へデバイス10を推進させるためのものである。推進手段18は垂直方向に対してある角度を成して下方向に延在している。図10は、モータ26の回転(矢印48)とデバイス10の前方への動き(矢印50)との関係を示す。
【0036】
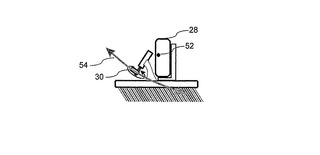
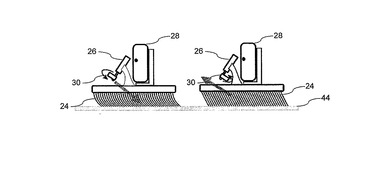
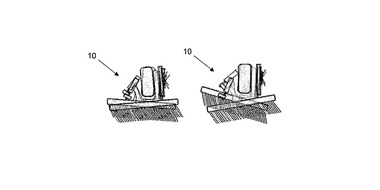
図11に、デバイス10の重心52を示す。重量体30の重心はポータブルデバイス10の重心52から離れている。矢印54は、重量体30がポータブルデバイス10の重心52の周りをどのように効率的に振動するかを示す。デバイス10用のバッテリィを具えるユニット28とその電子部品は比較的重く、デバイス10の重量のほとんどがユニット28に集中している。図12は、重量体30の回転がどのようにデバイス10を前方へ移動させているかを示す図である。図12の左側の図では、重量体30は面44から離れて回転しており最も高い地点にある(重量体30はモータ26の回転軸からオフセットしている)。これによって、毛24が曲がり、エネルギィが蓄えられる。重量体30が回転を続けると(図12の右側の図)、毛24は曲がらなくなり、デバイス10を前方へ進める。このサイクルが繰り返されて、デバイス10は振動モータ26の動力の下、前方へ滑って移動する。
【0037】
図13は、ポータブルデバイス10の更なる実施形態を示す図であり、この形態ではオーディオ手段20がプリント回路基盤(PCB)56の後部に取り付けられている。このデバイスは、基部32、基部32に取り付けたモータ26、動力源及びユニット28内側のスイッチデバイスを具え、基部32から下方に延在している推進手段18を有する。モータ26は基部32に固定して取り付けられており、動力源とスイッチデバイスは基部32にフレキシブルに取り付けられている。図14は、部品を固定的に取り付けた場合(左側の図)と、フレキシブルに取り付けた場合(右側の図)を比較したときの、デバイス10の動きの差を示す図である。デバイス10において可能であれば、これらの要素(モータを除く)はフレキシブルに取り付ける。なぜなら、運動量の保存によって、振動モータに連結しているあらゆる質量が総振動量を減らし、従ってデバイス10の総移動量が小さくなるためである。従って、バッテリィなどの部品を基部32にフレキシブルに取り付けることは有益である。
【0038】
デバイス10は2個のモータと、これに対応する2個の重量物を使用するように変形することができる。これによって、モータを様々に組み合わせて使用して、左、右及び前方など様々な動きをさせることができる。ユーザが電話機をデバイス10に近接させると、検出レベルが異なる放射を用いて、組み合わせた両モータを制御することができる。ユーザは、おそらくポータブルデバイス10に設けた一又はそれ以上のノブによって、ポータブルデバイス10の動きを変える閾値を調整できる。これによって、ユーザは、デバイス10の動きが変わる距離を設定できる。
【0039】
上述の実施形態では、デバイス10はRF信号の検出によって制御される。しかしながら、モータ方向の切りかえを制御する入力デバイスは、オーディオを検出する検出器を具えることができる。この場合、デバイス10は、笛、音声命令、又はユーザが手をたたく音もしくは指を鳴らす音などの特定の音に応答する。同様に、デバイス10が、可視光を検出する検出器を具え、デバイス10が応答する信号が特定の光レベルを含んでおり、デバイス10に当たる光に基づいてデバイス10がその動きを変えるようにしてもよい。
【図面の簡単な説明】
【0040】
【図1】図1は、ポータブルデバイス及び携帯電話機を示す斜視図である。
【図2】図2は、図1と同様にポータブルデバイス及び携帯電話機を示す図であり、携帯電話機が呼び出しを受信している。
【図3】図3は、図2と同様にポータブルデバイス及び携帯電話機を示す図であり、異なる態様で応答しているポータブルデバイスを示す。
【図4】図4は、図1と同様の図であり、携帯電話機に近接したポータブルデバイスの効果を示す。
【図5】図5は、図4と同様の図であり、携帯電話機の近接のポータブルデバイスへの異なる効果を示す。
【図6】図6は、ポータブルデバイスの3つの実施形態の上面、側面、前面のセットを示す。
【図7】図7は、ポータブルデバイスの内部構成要素の回路図である。
【図8】図8は、検出したRFのレベルに対するデバイスからの携帯電話機の距離を示すグラフであり、動きの閾値が記載されている。
【図9】図9は、ポータブルデバイスのさらなる側面図である。
【図10】図10は、モータの回転方向対移動方向を矢印で示す図である。
【図11】図11は、図9と同様の図であり、ポータブルデバイスの側面図である。
【図12】図12は、一対のポータブルデバイスの側面図であり、デバイスの毛の運動を説明する図である。
【図13】図13は、ポータブルデバイスのさらなる実施形態を示す側面図である。
【図14】図14は、一対のポータブルデバイスの側面図である。
【技術分野】
【0001】
本発明は振動モータによって推進するポータブルデバイスに関する。
【背景技術】
【0002】
英国の特許出願公開公報GB2343536は警報装置を開示している。当該装置は例えば携帯電話機であり、第1回転軸を有し、この装置を支持できる面に係合し、モータを具える。当該モータは第2回転軸を有するロータ軸を具える。このモータは装置のユーザに電話の呼び出し又はメッセージの受信などの事象を知らせるように動作する。モータは第2回転軸が第1回転軸にほぼ平行に装置内に配置されており、モータの起動によって回転モーメントが作られて、装置が第1軸を中心に回転する。この明細書に記載されているデバイスは呼び出し受信に応答して、単にその場で回転するのみであり、その動作は極めて限定されている。
【0003】
別の同様のシステムが英国の特許出願公開公報GB2378617に開示されており、これは所定の条件に応答して振動するように設計された携帯機器を示す。当該携帯機器は、携帯電話機でもよく、プロセッサに接続されて、呼び出し受信などの所定の条件に応答して振動するように動作可能な振動デバイスを具える。この振動は下側部に側面を有する外部容器に伝わって、携帯機器が机などの面上に置かれており、この振動デバイスが動作すると、当該振動が携帯機器を面上で動かす。この動きは前記プロセッサによって携帯機器が面上で所定の軌跡を描くように制御されている。携帯機器は手で持てる大きさのゲーム機器、玩具、又はその他の電子機器でもよい。この振動デバイスは、載置面に対して回転軸が垂直であり、軸外に質量体を有する小型の多極コアレスマイクロモータである。この明細書に記載されているデバイスは所定の経路に沿って移動するように動作し、携帯電話機容器の前記下側面がモータ振動のエネルギィを特定方向の動きに伝達しないときには、制御可能な態様で、有効に又は正確に移動しない。これは利用可能な推力又は回転モーメントを最大にするものでもない。
【0004】
それゆえ、本発明の課題は従来技術を改良することである。
【0005】
本発明の第1態様によると、ポータブルデバイスが提供されており、当該ポータブルデバイスは、振動を提供するモータ、このモータに動力を供給する動力源、前記モータの方向を制御するスイッチデバイス、面に係合してモータが振動するときにデバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段、及び前記スイッチデバイスに接続されている入力デバイスを具え、前記スイッチデバイスは入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されている。
【0006】
本発明のこの態様によって、モータが方向を変えると、動きの形態が変わる単純な可動デバイスを提供できる。このデバイスでは、可動部品が最小化されており、様々な異なる入力を用いて前記モータの方向を切りかえることができる。下方に延在しており、垂直方向に角度を成すよう推進手段を設計することによって、前記デバイスが確実に制御可能に移動する。
【0007】
有利なことに、推進手段は一セットの毛を具える。角度を付けた毛を使用することで、後方向の摩擦が増加し、振動したときに前記デバイスを前方へ動かす。振動が物体を後方へ移動させようとすると、この毛が面に食い込み、振動が物体を前方へ移動させようとすると、毛が面上を摺動する。
【0008】
角度付の毛は「後方ストローク」時に撓んでエネルギィを蓄え、前方ストローク時に真っ直ぐになって前記エネルギィを放出するように、特に剛性が選択されており、このことが前記物体を前方へ推進させるのに役立つ。毛が柔軟すぎると、毛がエネルギィを吸収してしまうためエネルギィが無駄になり、毛が固すぎると、毛が撓まないのでエネルギィが蓄えられず、後方ストローク時に逆に後方に物体が進められてしまう。GB2378617に開示されている発明ではこのようなことが起こる。
【0009】
好ましくは、モータ軸は垂直方向及び水平方向に対して角度を成している。モータがある角度で設定されており、振動運動は、面にかかる力が大きくなるため後方向における摩擦が増えて、振動運動が面から離れると、前方向における摩擦が小さくなるように作用する。
【0010】
理想的には、前記モータが重量体を回転させて、この重量体の重心がモータ軸からオフセットしており、この重量体の重心がポータブルデバイスの重心から離れている。角度付モータは当該デバイスの重心から離して下側に配置されており、前記運動の効果を強化している。これはデバイスの重心は静止する傾向にあり、全てのポイントはその周りを回転するからである。
【0011】
移動するオフセット重量体を物体の重心から離して取り付けることにより、回転揺動運動が生じる。この運動は、ユニットが前方へ動くとき旋回運動を起こす。当該ユニットの重心からの重量体の距離を変えることで、ユニットの旋回半径を変えることができる。モータの回転方向を逆にすることで、物体の旋回方向を変えることができる。
【0012】
有利なことに、デバイスはさらに、基部、当該基部に取り付けられたモータ、動力源、及びスイッチデバイスを具え、推進手段が前記基部から下方に延在している。モータは基部に固定して取り付けられており、動力源とスイッチデバイスは基部にフレキシブルに取り付けられている。振動モータは基部に剛性支持体で直接連結されており、端部への振動エネルギィと運動の伝達が最大になるようにしている。ユニットの他の要素、特に重い要素は、可撓性のある台に取り付ける。これは、運動量の保存によって、振動モータに連結しているあらゆる質量が移動量を減らすためである。
【0013】
好ましくは、前記入力デバイスは電磁放射を検出する検出器を具え、前記所定の信号は検出した電磁放射レベルを含む。および/または、入力デバイスが音響を検出する検出器を具え、前記所定の信号が特定の音を含む。ポータブルデバイスは、携帯電話機がデバイスの近くに来ると反応する、又は、指を鳴らすもしくは笛を吹くなど、その他のあらゆる好適な音に反応するように構成することができる。さらなる実施形態では、前記制御手段が光源であり、光源の検出方向を利用して、モータの回転方向を決定するようにしている。
【0014】
本発明の実施形態について例示によって、添付図面を参照して述べる。
【0015】
図1にポータブルデバイス10及び携帯電話機12を示す。ポータブルデバイス10は検出器14の形式の入力デバイス14を具え、電磁放射を検出する。検出器14は例えば、携帯電話分野で使用されている無線周波(RF)通信受信用の標準のアンテナである。又、ポータブルデバイス10には出力手段16が設けられており、図1に示すデバイス10では、;この出力手段はポータブルデバイス10を動かすための推進手段18、オーディオ手段20、及び表示手段22の3つの構成要素である。
【0016】
電話機12の音が鳴ると(図2に示すように)、デバイス10は、休眠状態から起動してオーディオ手段20から音を出す(ビーッビーッと音を出す)。次いで、デバイス10がRFを検出している限り、(すなわち、電話機がRFを発しており、範囲内にある限り)、デバイス10はオーディオ手段20から音を出し続ける。
【0017】
デバイス10は受信したRFのレベルも検出できるので、電話機12が検出器14に大体どの程度近いかを大まかに知らせることができる。従って、図3に示すように、電話機12がデバイス10に近づくと、ポータブルデバイス10が動作モードになる。図4に示すように、デバイス10は、電話機12の近接度を変えることによって操縦できる。簡単なスキームによれば、電話機が近づくとデバイス10は左へ曲がり、電話機が離れると、デバイス10は右へ曲がり、電話機が遠くへ離れるとデバイス10は停止する。所定時間RFを受信しないと、デバイス10は待受モードに戻り、RFの検出を待つ。
【0018】
デバイス10内部には、検出器14と出力手段16に接続されたコントロールデバイスがある。このコントロールデバイス(図7に詳細を示す)は検出器14の出力に応じて出力手段16を制御するためのデバイスである。検出した電磁放射が第1閾値を超えると出力手段16は第1の態様で動作し、検出した電磁放射が第2閾値を超えると出力手段は第2態様で動作し、第1及び第2の態様は互いに異なる。第2閾値は第1閾値より大きい。
【0019】
ユーザが電話中は、デバイス10は応答し続けることが可能であるが、電話機12が終了したら、デバイス10は動作モードになる。電話機12の近接度を変えることによって、ポータブルデバイス10を操縦することができる(又はその他の動作変化が生じるようにする)。電話機12からのRFの発生は、必ずしも呼び出しを行う又は受信することによって生じる必要はなく、ユーザが1111又は別の実在しない番号に電話をかけた場合に、標準の携帯電話が接続しようとしている間、RFを流す、このサービスに対してはユーザに費用がかからない。
【0020】
ポータブルデバイス10は、携帯電話機12の近接度に応じたデバイスの動作(音/動き/光、他)の制御/操縦及び変換に対応している。図5はデバイス10の代替の態様を示し、ここでは携帯電話機12の近接度によってデバイス10のオーディオ手段の動作を変えている。携帯電話機12がデバイス10の近くに来ると、デバイスは動作モードになり、デバイス10から発する音響の特徴が、デバイス10が低レベルのRFを検出したときの音響から変わる。RFの検出レベルが設定閾値を越えると(電話機12がデバイス10に近接していることを示す)、異なるオーディオ出力が使用される。
【0021】
図6はポータブルデバイス10の構成要素をさらに詳細に示す図である。この図には、3つの異なる構成が示されているが、これらの構成はデバイス10を前方に推進する推進手段18として用いる毛24のレイアウトが異なるだけである。ポータブルデバイス10は振動を提供するモータ26、このモータに動力を供給する動力源を具えるユニット28、及びモータの速度と方向を制御するスイッチデバイスを具える。推進手段18は、モータ26の振動時に、デバイスを推進するための手段である。
【0022】
デバイス10を駆動し、操縦するために、モータ26にはオフセット重量体30が設けられている。この重量体30の重心はモータ26の軸からオフセットしている。又、ユニット28はスイッチデバイスに接続された入力デバイスを具え、このスイッチデバイスは入力デバイスが所定の信号を受信するとモータ26の方向を切りかえるように構成されている。デバイス10を前方に駆動する振動を用いて、モータ26の回転方向を変えることで、デバイス10の構造によって、デバイス10が左又は右へ弧状に動き、デバイス10を操縦することができる。
【0023】
モータ26を基部32に直接取り付けることが、毛24への振動の伝達を助け、より一層の前方推力を提供する。角度付の毛24は2つの機能を提供している。すなわち、毛24は後方向の摩擦を大きくして、モータの振動時にデバイス10を前方に動かし、デバイス10が後方に移動しようとするときに、エネルギィを蓄えて、デバイス10が前方に動くときに、そのエネルギィを解放する。これによって円振動をより一層前方への動きに変えることができる。その他の装置(例えば、ミニポーゴスティックなどのばね、又は小さな緩衝装置)もこの前方への移動に利用できる。
【0024】
このように、前方を向いた面に振動が生じるようにモータ26に角度を付けることで、面にあたる力が大きくなり、後方向の摩擦が大きくなる。後方への運きは毛24を圧縮する方向にあるので、より一層のエネルギィが毛24に蓄えられる。この動きが表面から離れていると、前方向の摩擦が減る。
【0025】
移動オフセット重量体30をデバイス10の重心から離して取り付けることで、わずかな回転揺動運動が生じる。この運動によって、デバイス10が前方に動くときに旋回運動が生じる。従って、モータが回転する方向を変えることで、当該物体を操縦することができる。重量体30のデバイス10の重心からの距離を変えることによって、デバイス10の旋回半径を変えることができる。モータ26が重心の近くにあると、デバイス10の動きは直線からわずかに旋回するのに対し、モータ26が重心から離れていると、この動きはどちらかの方向に比較的急に旋回する。
【0026】
モータ、基部及び毛をデバイス10の主重量物(バッテリィなど)から独立して振動させることで、毛/基部がさらに動くようになり、前方へのより早い移動を提供する。ユニットと面との間の接触域はどのような形であってもよい。振動モータ26を垂直方向に対して角度付けることで、推進手段から生じる前方への推力が最大になる。角度付の毛を使用することによって、振動モータ26から前方への動きが生じる。携帯電話機の近接によるデバイス10の操縦を利用して、携帯電話機などのデバイスの近接によって車両を操縦することができる。
【0027】
上述した駆動/操縦方法は、電話などのRF源を用いて制御する必要はない。たとえば、指をならすなどの音響的トリガを用いて、モータの方向(従って、デバイス10の移動方向)を変えることもできる。又、周波数に応答するデバイス10を設けて、ユーザがデバイス10に対して笛を鳴らす又は音楽を流すことで、デバイス10の移動を制御できるようにしてもよい。
【0028】
デバイス10は、電波を送信している携帯電話機の近接によるモータ方向の転換、及び、携帯電話機の近接によるモータの始動と停止に対応している。同様に、電話機の近接によってスピーチ/音響的出力を変化させるというように、デバイスの動作変化が、電話機の近接によって生じるようにしてもよい。
【0029】
図7は、ポータブルデバイス10で用いる電子回路をさらに詳細に示す。アンテナ14(検出器として機能する)は、RF検出器34、増幅器36及び比較器38を介してコントロールデバイス40に接続されている。コントロールデバイス40は出力手段16(ここではオーディオ手段として示されている)とモータドライバ42と通信する。モータドライバは、モータ30の回転軸からオフセットしている重量体30を具えるモータ26に動力を供給する。
【0030】
周波数範囲900MHz乃至2000MHz(携帯電話機で利用する周波数)の、RFが、RF検出器34によって検出され、増幅されて、携帯電話機をデバイス10近傍で使用中に(使用可能範囲は増幅を変えることで調整できる)、パルス列が比較器38の入力に与えられる。この信号の振幅はアンテナ14に提供されるRFの強さに比例する。基準電圧は比較器38の他方の入力に印可される。次いで、RFの値が基準電圧(閾値)よりも高い又は低いかどうかを決定するために、マイクロコントローラ40によって比較器38の出力を確認する。比較器の基準電圧を変えることで、マイクロコントローラは、携帯電話機12が使用中であるかどうか、使用中であれば、及び携帯電話機が近くにあるか又は遠くにあるかを決定する。代替的に、アナログディジタルコンバータを使用することもできる。
【0031】
このようにして決定した携帯電話機12の近接に基づいて、マイクロコントローラ40が音を出力して、モータ26の回転の状態および/または方向を変える。又、マイクロコントローラ40は入力パルスのタイミングを確認して、RFが携帯電話機からのものであり、無線LAN(WIFI)、マイクロ波又はブルートゥースデバイスなど別のRF源からのものではないかどうかを決定する。
【0032】
図8は、携帯電話機12がデバイス10に向けて移動したときのRFの検出レベルの変化を示すグラフである。このグラフには閾値1及び2が記載されている。これらの閾値の位置の選択は設計上の選択事項であり、デバイス10で使用されるハードウェア及び電気回路によって異なる。
【0033】
携帯電話機12がデバイス10に向けて移動するときのデバイス10の動きの比例的変化を含めて、複数の閾値と複数のそれに対応する動きを利用できる。例えば、電話機10がデバイス10に向けて移動すると、デバイス10のオーディオ手段からの出力音量が大きくなるようにすることができる。又は、モータの速度を変えるようにしてもよい。この場合、デバイス10は多数のインクリメンタルな閾値を操作して、各デバイス10の動作の変更を決定するように構成できる。
【0034】
デバイス10は、使用中の携帯電話機の距離、又は検出した外部RF信号の強度に基づく振動モータ26方向の転換に対応している。同様に、使用中の携帯電話機への近接、又は検出したRF信号の強度に基づいてデバイス10が弧を描く方向を転換し、デバイス10を操縦できる。又、デバイス10のオーディオ出力は、使用中の携帯電話機の近接に基づいて、又は検出したRF信号の強度によって、出力音量が変わるように構成することもできる。
【0035】
図9は、面44に係合する推進手段18(毛24)を有するポータブルデバイス10を示す。毛24は、モータが振動しているときに、矢印46の方向に前方へデバイス10を推進させるためのものである。推進手段18は垂直方向に対してある角度を成して下方向に延在している。図10は、モータ26の回転(矢印48)とデバイス10の前方への動き(矢印50)との関係を示す。
【0036】
図11に、デバイス10の重心52を示す。重量体30の重心はポータブルデバイス10の重心52から離れている。矢印54は、重量体30がポータブルデバイス10の重心52の周りをどのように効率的に振動するかを示す。デバイス10用のバッテリィを具えるユニット28とその電子部品は比較的重く、デバイス10の重量のほとんどがユニット28に集中している。図12は、重量体30の回転がどのようにデバイス10を前方へ移動させているかを示す図である。図12の左側の図では、重量体30は面44から離れて回転しており最も高い地点にある(重量体30はモータ26の回転軸からオフセットしている)。これによって、毛24が曲がり、エネルギィが蓄えられる。重量体30が回転を続けると(図12の右側の図)、毛24は曲がらなくなり、デバイス10を前方へ進める。このサイクルが繰り返されて、デバイス10は振動モータ26の動力の下、前方へ滑って移動する。
【0037】
図13は、ポータブルデバイス10の更なる実施形態を示す図であり、この形態ではオーディオ手段20がプリント回路基盤(PCB)56の後部に取り付けられている。このデバイスは、基部32、基部32に取り付けたモータ26、動力源及びユニット28内側のスイッチデバイスを具え、基部32から下方に延在している推進手段18を有する。モータ26は基部32に固定して取り付けられており、動力源とスイッチデバイスは基部32にフレキシブルに取り付けられている。図14は、部品を固定的に取り付けた場合(左側の図)と、フレキシブルに取り付けた場合(右側の図)を比較したときの、デバイス10の動きの差を示す図である。デバイス10において可能であれば、これらの要素(モータを除く)はフレキシブルに取り付ける。なぜなら、運動量の保存によって、振動モータに連結しているあらゆる質量が総振動量を減らし、従ってデバイス10の総移動量が小さくなるためである。従って、バッテリィなどの部品を基部32にフレキシブルに取り付けることは有益である。
【0038】
デバイス10は2個のモータと、これに対応する2個の重量物を使用するように変形することができる。これによって、モータを様々に組み合わせて使用して、左、右及び前方など様々な動きをさせることができる。ユーザが電話機をデバイス10に近接させると、検出レベルが異なる放射を用いて、組み合わせた両モータを制御することができる。ユーザは、おそらくポータブルデバイス10に設けた一又はそれ以上のノブによって、ポータブルデバイス10の動きを変える閾値を調整できる。これによって、ユーザは、デバイス10の動きが変わる距離を設定できる。
【0039】
上述の実施形態では、デバイス10はRF信号の検出によって制御される。しかしながら、モータ方向の切りかえを制御する入力デバイスは、オーディオを検出する検出器を具えることができる。この場合、デバイス10は、笛、音声命令、又はユーザが手をたたく音もしくは指を鳴らす音などの特定の音に応答する。同様に、デバイス10が、可視光を検出する検出器を具え、デバイス10が応答する信号が特定の光レベルを含んでおり、デバイス10に当たる光に基づいてデバイス10がその動きを変えるようにしてもよい。
【図面の簡単な説明】
【0040】
【図1】図1は、ポータブルデバイス及び携帯電話機を示す斜視図である。
【図2】図2は、図1と同様にポータブルデバイス及び携帯電話機を示す図であり、携帯電話機が呼び出しを受信している。
【図3】図3は、図2と同様にポータブルデバイス及び携帯電話機を示す図であり、異なる態様で応答しているポータブルデバイスを示す。
【図4】図4は、図1と同様の図であり、携帯電話機に近接したポータブルデバイスの効果を示す。
【図5】図5は、図4と同様の図であり、携帯電話機の近接のポータブルデバイスへの異なる効果を示す。
【図6】図6は、ポータブルデバイスの3つの実施形態の上面、側面、前面のセットを示す。
【図7】図7は、ポータブルデバイスの内部構成要素の回路図である。
【図8】図8は、検出したRFのレベルに対するデバイスからの携帯電話機の距離を示すグラフであり、動きの閾値が記載されている。
【図9】図9は、ポータブルデバイスのさらなる側面図である。
【図10】図10は、モータの回転方向対移動方向を矢印で示す図である。
【図11】図11は、図9と同様の図であり、ポータブルデバイスの側面図である。
【図12】図12は、一対のポータブルデバイスの側面図であり、デバイスの毛の運動を説明する図である。
【図13】図13は、ポータブルデバイスのさらなる実施形態を示す側面図である。
【図14】図14は、一対のポータブルデバイスの側面図である。
【特許請求の範囲】
【請求項1】
ポータブルデバイスにおいて、ポータブルデバイスは、振動を提供するモータと、当該モータに動力を供給する動力源と、前記モータの方向を制御するスイッチデバイスと、面に係合して前記モータが振動するときに前記デバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段と、及び前記スイッチデバイスに接続されている入力デバイスとを具え、前記スイッチデバイスが前記入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されていることを特徴とするポータブルデバイス。
【請求項2】
請求項1に記載のデバイスにおいて、前記モータが重量体を回転させ、当該重量体の重心は前記モータ軸からオフセットしていることを特徴とするデバイス。
【請求項3】
請求項2に記載のデバイスにおいて、前記重量体の重心が前記ポータブルデバイスの重心から離れていることを特徴とするデバイス。
【請求項4】
請求項1、2又は3のいずれか一項に記載のデバイスにおいて、前記モータ軸が垂直方向及び水平方向に対して角度を成していることを特徴とするデバイス。
【請求項5】
請求項1乃至4のいずれか一項に記載のデバイスがさらに、基部と、当該基部に取り付けられた前記モータと、前記動力源と、前記スイッチデバイスとを具え、前記推進手段が前記基部から下方に延在していることを特徴とするデバイス。
【請求項6】
請求項5に記載のデバイスにおいて、前記モータが前記基部に固定して取り付けられており、前記動力源と前記スイッチデバイスは前記基部にフレキシブルに取り付けられていることを特徴とするデバイス。
【請求項7】
請求項1乃至6のいずれか一項に記載のデバイスにおいて、前記推進手段が一セットの毛を具えることを特徴とするデバイス。
【請求項8】
請求項1乃至7のいずれか一項に記載のデバイスにおいて、前記モータの方向を変えることで、前記ポータブルデバイスの動く方向を変えることを特徴とするデバイス。
【請求項9】
請求項1乃至8のいずれか一項に記載のデバイスにおいて、前記入力デバイスが電磁放射を検出する検出器を具え、前記所定の信号は検出した電磁放射レベルを含むことを特徴とするデバイス。
【請求項10】
請求項1乃至9のいずれか一項に記載のデバイスにおいて、前記入力デバイスが音響を検出する検出器を具え、前記所定の信号が特定の音を含むことを特徴とするデバイス。
【請求項11】
請求項1乃至10のいずれか一項に記載のデバイスにおいて、前記入力デバイスが可視光を検出する検出器を具え、前記所定の信号が特定の光レベルを含むことを特徴とするデバイス。
【請求項1】
ポータブルデバイスにおいて、ポータブルデバイスは、振動を提供するモータと、当該モータに動力を供給する動力源と、前記モータの方向を制御するスイッチデバイスと、面に係合して前記モータが振動するときに前記デバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段と、及び前記スイッチデバイスに接続されている入力デバイスとを具え、前記スイッチデバイスが前記入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されていることを特徴とするポータブルデバイス。
【請求項2】
請求項1に記載のデバイスにおいて、前記モータが重量体を回転させ、当該重量体の重心は前記モータ軸からオフセットしていることを特徴とするデバイス。
【請求項3】
請求項2に記載のデバイスにおいて、前記重量体の重心が前記ポータブルデバイスの重心から離れていることを特徴とするデバイス。
【請求項4】
請求項1、2又は3のいずれか一項に記載のデバイスにおいて、前記モータ軸が垂直方向及び水平方向に対して角度を成していることを特徴とするデバイス。
【請求項5】
請求項1乃至4のいずれか一項に記載のデバイスがさらに、基部と、当該基部に取り付けられた前記モータと、前記動力源と、前記スイッチデバイスとを具え、前記推進手段が前記基部から下方に延在していることを特徴とするデバイス。
【請求項6】
請求項5に記載のデバイスにおいて、前記モータが前記基部に固定して取り付けられており、前記動力源と前記スイッチデバイスは前記基部にフレキシブルに取り付けられていることを特徴とするデバイス。
【請求項7】
請求項1乃至6のいずれか一項に記載のデバイスにおいて、前記推進手段が一セットの毛を具えることを特徴とするデバイス。
【請求項8】
請求項1乃至7のいずれか一項に記載のデバイスにおいて、前記モータの方向を変えることで、前記ポータブルデバイスの動く方向を変えることを特徴とするデバイス。
【請求項9】
請求項1乃至8のいずれか一項に記載のデバイスにおいて、前記入力デバイスが電磁放射を検出する検出器を具え、前記所定の信号は検出した電磁放射レベルを含むことを特徴とするデバイス。
【請求項10】
請求項1乃至9のいずれか一項に記載のデバイスにおいて、前記入力デバイスが音響を検出する検出器を具え、前記所定の信号が特定の音を含むことを特徴とするデバイス。
【請求項11】
請求項1乃至10のいずれか一項に記載のデバイスにおいて、前記入力デバイスが可視光を検出する検出器を具え、前記所定の信号が特定の光レベルを含むことを特徴とするデバイス。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公表番号】特表2008−546518(P2008−546518A)
【公表日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願番号】特願2008−516412(P2008−516412)
【出願日】平成18年6月16日(2006.6.16)
【国際出願番号】PCT/GB2006/002216
【国際公開番号】WO2006/136792
【国際公開日】平成18年12月28日(2006.12.28)
【出願人】(507406806)ジェイキッド リミテッド (1)
【Fターム(参考)】
【公表日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願日】平成18年6月16日(2006.6.16)
【国際出願番号】PCT/GB2006/002216
【国際公開番号】WO2006/136792
【国際公開日】平成18年12月28日(2006.12.28)
【出願人】(507406806)ジェイキッド リミテッド (1)
【Fターム(参考)】
[ Back to top ]