
マイクロウエーブセンサ
【課題】 簡単な構成によって、風によって揺れている草木などと侵入者などの検知対象物体とをより的確に識別可能とすることで、誤報を極力防止するとともに動作の信頼性を高めたマイクロウエーブセンサを提供する。
【解決手段】 検知された検知対象物体までの距離の単位時間当たりの変化量を移動距離として計測する移動距離計測手段と、この移動距離計測手段によって計測された前記移動距離が所定の判定閾値以上である場合に警告信号を出力するように制御する警告信号出力制御手段と、前記移動距離が前記判定閾値以上である状態が第1所定期間以上継続したとき、および前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が所定値以内である状態が第2所定期間以上継続したときに、前記判定閾値をより大きな値に変更する判定閾値変更手段とを備える。
【解決手段】 検知された検知対象物体までの距離の単位時間当たりの変化量を移動距離として計測する移動距離計測手段と、この移動距離計測手段によって計測された前記移動距離が所定の判定閾値以上である場合に警告信号を出力するように制御する警告信号出力制御手段と、前記移動距離が前記判定閾値以上である状態が第1所定期間以上継続したとき、および前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が所定値以内である状態が第2所定期間以上継続したときに、前記判定閾値をより大きな値に変更する判定閾値変更手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マイクロ波によって侵入者などを検出するマイクロウエーブセンサに関し、特に、本来の検知対象のみをより的確に検出するとともに誤報の発生を極力回避して信頼性を向上させたマイクロウエーブセンサに関する。
【背景技術】
【0002】
従来、防犯装置の一つとして、マイクロ波を検知エリアに向けて送信し、検知エリア内に人体(侵入者)が存在する場合には、その人体からの反射波(ドップラー効果によって変調したマイクロ波)を受信して人体を検知するマイクロウエーブセンサが知られている(例えば、特許文献1参照。)。
【0003】
さらに、マイクロウエーブセンサの1タイプとして、周波数の異なる複数のマイクロ波を利用して検知エリア内に存在する人体などの検知対象物体までの距離を計測するようにしたものも提案されている。この種のセンサは、例えば周波数の異なる2種類のマイクロ波を検知エリアに向けて送信し、それぞれの反射波に基づく2つのIF信号の位相差を検出するようになっている。この位相差は、検知対象物体までの距離に相関があり、検知対象物体までの距離が大きいほど位相差も大きくなる傾向がある。つまり、この位相差を求めることにより検知対象物体までの距離を計測することが可能である。また、この位相差の時間的な変化を認識することにより検知エリア内の検知対象物体が移動しているか否かを判定することも可能である。これにより、例えば検知エリア内で移動している検知対象物体のみを識別することが可能になる。
【0004】
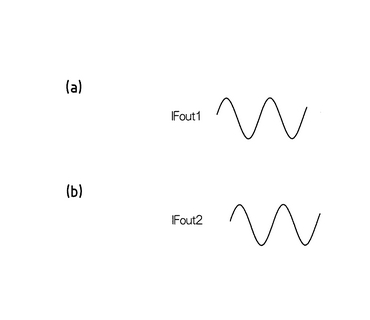
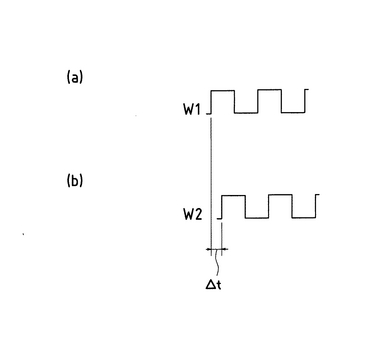
例えば、周波数の異なる2種類のマイクロ波の反射波に基づくIF出力信号が図2(a)および(b)に示すような正弦波IFout1、IFout2(検知対象物体までの距離に応じた位相差を有している)である場合、これらのIF信号出力を波形整形して得られる矩形波W1、W2は、それぞれ図3(a)および(b)に示すようになる。そして、これらの矩形波W1、W2の位相差Δφ(図中における矩形波の立ち上がり部分の時間差Δtから換算)を検出することによって検知対象物体までの距離を計測することが可能になる。また、この矩形波W1、W2の位相差の時間的な変化を認識することにより、検知エリア内の検知対象物体の移動(センサに近づいているのか遠ざかっているのか)を認識することが可能である。
【0005】
ところで、この種のセンサを防犯用センサとして使用し、上記位相差の時間的な変化を認識して、検知エリア内で移動している検知対象物体のみを認識するようにした場合、次のような問題点があった。
【0006】
つまり、この種のセンサを屋外に設置した場合に、風による草木などの揺れによって上記矩形波W1、W2に位相差が生じ、これによって草木などを検知対象物体であると誤検知して誤報を発してしまう可能性がある。同様に、この種のセンサを屋内に設置した場合に、換気用のファンの回転動作や、風によるブラインドやカーテンの揺れ、あるいはマイクロウエーブセンサ自体の振動などによっても上記矩形波W1、W2に位相差が生じ、この場合にも人体以外の物体を検知対象物体であると誤検知して誤報を発してしまう可能性がある。
【0007】
そこで、本発明の発明者は、人体などの検知対象物体とそうでない物体(草木やファン等)との判別を正確に行って誤報を回避する技術について既に提案している(特許文献2参照。)。
【0008】
この提案は、各反射波に基づいて検知エリア内に存在する物体までの相対距離の単位時間当たりの変化量(物体の移動距離)を計測し、その移動距離が所定の判定閾値以上であるときにのみ、その物体を検知対象物体であると判定するものである。つまり、風によって揺れている草木や回転しているファン等は移動距離が僅かであるのに対し、人体などの検知対象物体では移動距離が大きくなるので、その差を認識することで検知対象物体であるか否かを的確に判定するようにしている。なお、以下の説明では、このような誤報防止対策を「草木対策」、上記の判定閾値を「草木対策レベル」と記すこととする。
【0009】
しかし、草木対策レベルを適切に設定することは難しい。つまり、草木対策レベルを低く(検知した物体の移動距離が短くても物体検知を行う状態に)設定してしまうと、風によって草木が数十cmの範囲で揺れている状況では、この草木を検知対象物体であると認識してしまって誤報が発生してしまう。特に、この種のマイクロウエーブセンサは、検知エリア内の人体からの赤外線を受けて人体と周囲温度との差から侵入者を検知する受動型赤外線センサ(PIRセンサ)と組み合わされて使用される場合が多いが(組み合わせセンサ)、このように草木対策レベルを低く設定した場合には、マイクロウエーブセンサは常時発報した状態になってしまう可能性がある。そうなると、PIRセンサ単体でセンサ装置を構成した場合と実質的に変わらなくなってしまい、組み合わせセンサとしての信頼性の低下を招いてしまう。
【0010】
逆に、草木対策レベルを高く(物体の総移動距離が長く(例えば100cm程度に)ならない限り物体検知を行わない状態に)設定してしまうと、検知エリア内を横切るように移動する人体(マイクロウエーブセンサとの相対距離の変化が少ない移動状態の物体)に対しては検知することが困難になり、この場合にもマイクロウエーブセンサの信頼性を確保することができない。
【0011】
そこで、マイクロウエーブセンサが設置されている場所のそのときの状況などに応じて、上述の草木対策レベルを自動的に複数段階に変化させることも考えられる。図9は、そのような従来技術のマイクロウエーブセンサにおける草木対策レベルの設定例を示すグラフである。図10は、この草木対策レベルの設定用ステータスカウンタに対する加減算の説明図である。ここで、ステータスカウンタSCとは、マイクロウエーブセンサの内部状態に対応するカウンタであり、その値は0〜100の範囲内に制限されているものとする。
【0012】
これらの図に示す設定例では、草木対策レベルは「なし」、「弱」、「強」の切り替えが可能となっている。具体的には、初期状態とステータスカウンタSCが30未満のときに草木対策レベルは0m(なし)に設定され、ステータスカウンタSCが30以上かつ70未満のときに草木対策レベルは0.4m(弱)に設定され、ステータスカウンタSCが70以上のときに草木対策レベルは0.6m(強)に設定される。
【0013】
そして、検知した物体の移動距離が草木対策レベルを超えたものの、例えば、組み合わされているPIRセンサでは何も検知していないことからそれが誤報であると判明した場合に、ステータスカウンタSCに一定値を加算するようにする。そうすると、このような誤報が複数回続くとステータスカウンタSCの値が増やされ、やがて草木対策レベルが1段階大きく設定されるので誤報が発生しにくくなる。それでも誤報がさらに続けば、草木対策レベルがもう1段階大きく設定され、誤報の発生が抑制されることになる。一方、物体が何も検知されていない状態が続いているときはこのステータスカウンタSCの値を少しずつ減算するようにする。
【0014】
つまり、上述のように草木対策レベルが一旦大きくなっても、誤報がない状態が継続すれば草木対策レベルも段階的に小さくなり、やがて0mまで戻り得る。このような構成にすることで、草木対策レベルを自動的に複数段階に変化させることができ、マイクロウエーブセンサの誤報の減少と信頼性の向上を図ることができる。
【特許文献1】特開平7−37176号公報
【特許文献2】特開2003−207462号公報
【発明の開示】
【発明が解決しようとする課題】
【0015】
ところが、このような構成では、ステータスカウンタSCの値を加算するのは、検知した物体の移動距離が草木対策レベルを超えるような誤報が続いたときである。そのため、検知した物体の移動距離がその時点の草木対策レベルにはわずかに届かないような状態が長時間続いても、ステータスカウンタSCの値が加算されることはない。その後、検知した物体の移動距離がその草木対策レベルをわずかに超えると、結果として誤報が発生してしまう。また、草木対策レベルが「なし」の状態のときには誤報がかなり発生しやすい不安定な状態になり得るという問題点もある。
【0016】
従来技術のこのような課題に鑑み、本発明の目的は、簡単な構成によって、風によって揺れている草木などと侵入者などの検知対象物体とをより的確に識別可能とすることで、誤報を極力防止するとともに動作の信頼性を高めたマイクロウエーブセンサを提供することである。
【課題を解決するための手段】
【0017】
上記目的を達成するため、本発明のマイクロウエーブセンサは、検知エリアに向けて周波数の異なる複数のマイクロ波を送信し、この検知エリア内に存在する検知対象物体からの前記マイクロ波それぞれの反射波に基づいてその検知対象物体までの距離を検知可能なマイクロウエーブセンサにおいて、検知された前記検知対象物体までの距離の単位時間当たりの変化量を前記検知対象物体の移動距離として計測する移動距離計測手段と、この移動距離計測手段によって計測された前記移動距離が所定の判定閾値以上である場合に警告信号を出力するように制御する警告信号出力制御手段と、前記移動距離が前記判定閾値以上である状態が第1所定期間以上継続したとき、および前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が所定値以内である状態が第2所定期間以上継続したときに、前記判定閾値をより大きな値に変更する判定閾値変更手段とを備えることを特徴とする。
【0018】
ここで、前記第1所定期間は前記第2所定期間以下となるように定める。ただし、これらの期間は必ずしも直接的な時間の単位で定めなくてもよい。例えば、何らかのカウンタを使用して、移動距離の計測回数に応じて定めるようにしてもよいが、これに限るものではない。また、前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が前記所定値より大きい状態が第3所定期間(前記第2所定期間以上となるように定める)以上継続したときには、前記判定閾値変更手段が前記判定閾値をより小さな値に変更するようにしておくことが好ましい。
【0019】
このような構成のマイクロウエーブセンサによれば、前記移動距離計測手段によって計測された前記移動距離が前記判定閾値よりわずかに小さい場合であっても、そのような状態がある程度の期間継続することにより、前記判定閾値がより大きな値に自動的に設定される。すなわち、実際に誤報が発生した場合だけでなく、誤報発生の可能性が高まりつつあるような状況を認識して前記判定閾値を予め大きくすることにより、実際の誤報の発生を未然に防止できる。これにより、誤報を極力回避して、動作の信頼性を高めることが可能となる。
【0020】
また、本発明のマイクロウエーブセンサにおいて、前記判定閾値は、0より大きい値を下限値とする所定範囲内に定めるようにしてもよい。例えば、前記判定閾値は、前記所定範囲内における段階的な値のいずれかとしてもよい。
【0021】
このような構成のマイクロウエーブセンサによれば、前記判定閾値が常に上記下限値以上の値に設定されているので、前記移動距離が極めて小さな値であって侵入者などである可能性が低いにも関わらず誤報を発生してしまうような不安定な状態となるような事態を排除できる。
【0022】
また、本発明のマイクロウエーブセンサにおいて、前記検知エリア内からの赤外線を受け、周囲との温度差から侵入物体を検知する受動型赤外線センサをさらに備え、この受動型赤外線センサが侵入物体を検知しているときのみ、前記警告信号の出力を許可することを特徴としてもよい。
【0023】
このような構成のマイクロウエーブセンサによれば、例え、前記移動距離と前記判定閾値との比較によって、風によって揺れている草木などを誤って侵入者などの検知対象物体であると判定した場合であっても、前記受動型赤外線センサが同時に侵入物体を検知していない限り、前記警告信号は出力されない。これにより、マイクロウエーブセンサ外部へ誤報が発せられることを防止できるため、動作の信頼性を一層高めることが可能となる。
【発明の効果】
【0024】
本発明のマイクロウエーブセンサによれば、実際に誤報が発生した場合だけでなく、誤報発生の可能性が高まりつつあるような状況を認識して、風によって揺れている草木などと侵入者などの検知対象物体とを識別するための判定閾値を予め変化させることにより、実際の誤報の発生を未然に防止できる。これにより、誤報を極力回避して、動作の信頼性を高めることが可能となる。
【発明を実施するための最良の形態】
【0025】
以下、本発明の実施形態を、図面を参照して説明する。ここでは、マイクロウエーブセンサを防犯センサとして使用した場合であって、周波数の異なる2種類のマイクロ波を利用して検知対象物体(侵入者等)を判定するようにしたマイクロウエーブセンサに本発明を適用した場合について説明する。
【0026】
<第1実施形態>
図1は、本発明の第1実施形態に係るマイクロウエーブセンサ100の回路構成の概略図である。図2は、このマイクロウエーブセンサ100のような2周波数タイプのマイクロウエーブセンサにおけるIF出力信号の波形図であり、(a)が一方のIFout1を示し、(b)が他方のIFout2を示す。図3は、これらのIF出力信号を波形整形して得られる矩形波の波形図であり、(a)が一方の矩形波W1を示し、(b)が他方の矩形波W2を示す。
【0027】
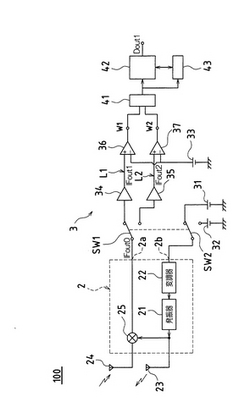
図1に示すように、このマイクロウエーブセンサ100は、マイクロ波の送受信などを行うRFモジュール2と、このRFモジュール2からの出力の処理などを行う信号処理部3とを備えている。
【0028】
RFモジュール2は、マイクロ波を発振する発振器21と、この発振器21から発振されるマイクロ波の周波数を切り換えるための変調器22と、発振器21から発振されたマイクロ波を検知エリアに向けて送信する送信アンテナ23と、人体などの物体によって反射されたマイクロ波の反射波を受信する受信アンテナ24と、この受信されたマイクロ波と発振器21の電圧波形とをミキシングして出力するミキサ25とを備えている。つまり、送信アンテナ23から検知エリアに向けて送信されたマイクロ波は、検知エリア内に物体が存在する場合、ドップラー効果によりその物体からの反射波の周波数が変調されて受信アンテナ24に受信される。この受信された反射波はミキサ25によって発振器21の電圧波形とミキシングされた後、RFモジュール2の出力側2aからIF出力信号(IFout0)としてアナログ信号処理部3に出力されるようになっている。
【0029】
信号処理部3は、送信アンテナ23から送信する各周波数のマイクロ波毎に対応して、IFアンプ34およびコンパレータ36を有する第1出力ラインL1と、IFアンプ35およびコンパレータ37を有する第2出力ラインL2と、コンパレータ36、37の基準電圧となる電源33とを備えている。さらに、RFモジュール2が2種類のマイクロ波を発振するための電源31、32が備えられ、コンパレータ36、37の出力側には移動距離計測部41、警告信号出力部42、草木対策レベル変更部43が設けられている。
【0030】
IFアンプ34、35は、第1スイッチSW1を介してRFモジュール2の出力側2aに接続されている。この第1スイッチSW1は、上記2種類のマイクロ波のうち一方が送信アンテナ23から送信されている場合には第1出力ラインL1に接続し、他方のマイクロ波が送信アンテナ23から送信されている場合には第2出力ラインL2に接続するように切り換えられる。つまり、一方のマイクロ波の送信時に物体によって反射された反射波に係るIF出力信号は第1出力ラインL1に出力され、他方のマイクロ波の送信時にその物体によって反射された反射波に係るIF出力信号は第2出力ラインL2に出力される構成となっている。
【0031】
また、電源31、32は、上記第1スイッチSW1に連動する第2スイッチSW2を介してRFモジュール2の入力側2bに接続されている。この第2スイッチSW2も、2種類のマイクロ波のうちいずれのマイクロ波を送信アンテナ23から送信するかによって、電源31、32に対する接続状態が切り換わるようになっている。つまり、この第2スイッチSW2が一方の電源31に接続している状態と他方の電源32に接続している状態とで、変調器22がマイクロ波の周波数を切り換え、これによって送信アンテナ23から送信されるマイクロ波の周波数が切り換えられる構成となっている。
【0032】
このようにして、第1スイッチSW1および第2スイッチSW2の切り換え動作に伴い、2つの処理動作(第1処理動作および第2処理動作)が所定時間間隔(例えば数msec間隔)をもって切り換えられるようになっている。ここで、第1処理動作とは、一方の周波数のマイクロ波が送信アンテナ23から検知エリアに向けて送信され、その反射波に基づくIF出力信号が信号処理部3の第1出力ラインL1に出力されてこの第1出力ラインL1において信号処理が行われる動作である。第2処理動作とは、他方の周波数のマイクロ波が送信アンテナ23から検知エリアに向けて送信され、その反射波に基づくIF出力信号が信号処理部3の第2出力ラインL2に出力されてこの第2出力ラインL2において信号処理が行われる動作である。そして、第1処理動作では、RFモジュール2から出力されたIF出力信号がIFアンプ34によって増幅され、このIFアンプ34からの出力(IFout1)がコンパレータ36によって矩形波W1に成形された後に移動距離計測部41に出力される。同様に、第2処理動作では、RFモジュール2から出力されたIF出力信号がIFアンプ35によって増幅され、このIFアンプ35からの出力(IFout2)がコンパレータ37によって矩形波W2に成形された後に移動距離計測部41に出力されるようになっている。
【0033】
検知エリア内に人体等の物体が存在していない場合には、送信アンテナ23から送信されたマイクロ波の周波数と受信アンテナ24に受信されたマイクロ波の周波数は等しいため、IFアンプ34、35からの出力信号におけるIF周波数は「0」となり、コンパレータ36、37からは信号が出力されない。これに対し、検知エリア内に人体等が存在する場合には、送信アンテナ23から送信されたマイクロ波の周波数に対して、受信アンテナ24に受信されたマイクロ波は変調されて周波数が異なっているため、コンパレータ36、37の出力信号波形には変化が生じ、この矩形波が移動距離計測部41に出力されるようになっている。
【0034】
移動距離計測部41は、コンパレータ36、37からの出力信号波形を受け、これら出力信号波形に基づいて検知エリア内に存在する物体までの相対距離を求める。上述したように、2つのIF出力信号(IFout1、IFout2)の位相差は物体までの相対距離に相関があり、物体までの相対距離が大きいほど位相差も大きくなる傾向があるので、この位相差から物体までの相対距離を求めることが可能である。さらに、これを継続的に行って時間的な変化を認識することにより、物体の単位時間当たりの移動距離Δd(速度ではなく、例えば1秒間に物体が実際に移動した距離)を計測する。
【0035】
警告信号出力部42は、移動距離計測部41から出力される物体の単位時間当たりの移動距離Δdを、風によって揺れている草木などであるか否かを判定するための判定閾値(草木対策レベルX)と大小比較する。移動距離Δdが草木対策レベルXより小さければ、検知された物体は草木などの可能性が高いため、警告信号Dout1の出力はOFF状態を保持する。一方、移動距離Δdが草木対策レベルX以上であれば、検知された物体は侵入者などである可能性が高いため、警告信号Dout1の出力をONとする。
【0036】
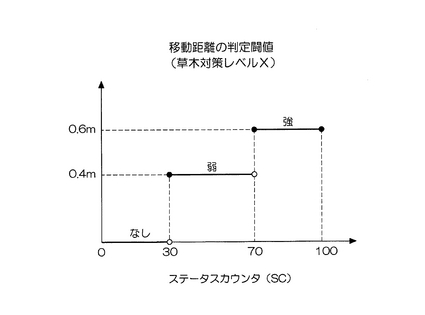
草木対策レベル変更部43は、警告信号出力部42で参照される草木対策レベルXを所定範囲内で自動的に複数段階で変化させる機能を有している。図4は、この草木対策レベルXの設定例を示すグラフである。図5は、この草木対策レベルXの設定用ステータスカウンタSCに対する加減算の説明図である。ここで、ステータスカウンタSCとは、マイクロウエーブセンサ100の内部状態に対応するカウンタであり、その値は0〜100の範囲内に制限されているものとする。
【0037】
図4に示すように、草木対策レベルXは「弱」、「中」、「強」の3段階に切り替えが可能となっている。具体的には、初期状態とステータスカウンタSCが30未満のときに草木対策レベルXは0.4m(弱)に設定され、ステータスカウンタSCが30以上かつ70未満のときに草木対策レベルXは0.6m(中)に設定され、ステータスカウンタSCが70以上のときに草木対策レベルXは0.8m(強)に設定される。
【0038】
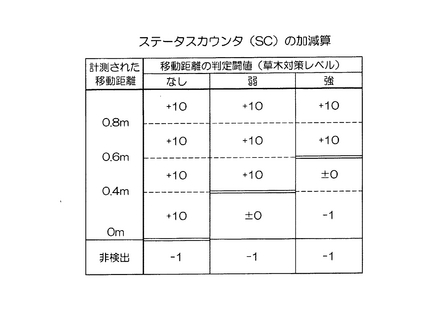
そして、検知した物体の移動距離Δdと草木対策レベルXとの大小関係やその差に基づいて、ステータスカウンタSCに対して図5に示すような加減算を行う。すなわち、移動距離Δdが草木対策レベルXを超えたものの、例えば、組み合わされているPIRセンサでは何も検知していないことからそれが誤報であると判明した場合には、移動距離Δdと草木対策レベルXとの差に応じてステータスカウンタSCへ20、30、40いずれかの加算を行う。また、移動距離Δdが草木対策レベルXを超えていなくてもそれらの差が小さいときにはステータスカウンタSCへ10の加算を行う。
【0039】
なお、移動距離Δdが草木対策レベルXを超えていないときの加算値は、移動距離Δdが草木対策レベルXを超えているときの加算値より小さいかため、草木対策レベルXが1段階大きくなるまでに要する加算回数は、移動距離Δdが草木対策レベルXを超えているときの方が少なくなる。
【0040】
一方、物体が何も検知されていない状態が続いているときは、このステータスカウンタSCの値を1ずつ減算するようにする。
【0041】
例えば、ステータスカウンタSCが初期状態で0である場合、草木対策レベルXは0.4m(弱)に設定されるが、そのときに計測された移動距離Δdが0.5mであったときはステータスカウンタSCに20が加算される。同じことがもう1回続けば、ステータスカウンタSCにさらに20が加算されて40となり、草木対策レベルXは1段階上の0.6m(中)に設定される。次に計測された移動距離Δdが0.7mであったときはステータスカウンタSCにさらに20が加算されて60となり、同じことがもう1回続けば、ステータスカウンタSCにさらに20が加算されて80となり、草木対策レベルXはもう1段階上の0.8m(強)に設定される。すなわち、このような場合は、草木対策レベルXが「弱」の状態から「強」まで達するのに要した移動距離Δdの計測回数は合計4回である。
【0042】
ステータスカウンタSCが初期状態で0である場合に計測された移動距離Δdが0.3mであったときはステータスカウンタSCに10が加算される。同じことがさらに2回(計3回)続けば、ステータスカウンタSCが30となり、草木対策レベルXは1段階上の0.6m(中)に設定される。次に計測された移動距離Δdが0.5mであったときはステータスカウンタSCに10が加算される。同じことがさらに3回(計4回)続けば、ステータスカウンタSCが70となり、草木対策レベルXはもう1段階上の0.8m(強)に設定される。すなわち、このような場合は、草木対策レベルXが「弱」の状態から「強」まで達するのに要した移動距離Δdの計測回数は合計7回である。
【0043】
また、ステータスカウンタSCが80に達して草木対策レベルXが「強」に設定された以降は移動距離Δdが検出されなくなったとすると、移動距離Δdの計測がさらに11回行われた後にステータスカウンタSCが69となって草木対策レベルXが「中」に設定され、移動距離Δdの計測がさらに40回行われた後にステータスカウンタSCが29となって草木対策レベルXが「弱」に設定される。 以上のような第1実施形態の構成によれば、検知した物体の移動距離Δdが草木対策レベルXよりわずかに小さい場合であっても、ステータスカウンタSCの値への加算が行われる。そして、そのような状態がある程度の期間継続すれば、草木対策レベルXが自動的に大きく設定される。すなわち、実際に誤報が発生した場合だけでなく、誤報発生の可能性が高まりつつあるような状況を認識して草木対策レベルXを予め大きくすることにより、実際の誤報の発生を未然に極力防止することが可能となる。また、草木対策レベルXの最小値を「0」とせず、最小値でも0.4mとすることにより、誤報が発生しやすい不安定な状態に一時的であっても陥ることを防止できる。
【0044】
<第2実施形態>
第1実施形態のマイクロウエーブセンサ100の信号処理部3の一部を機器組込用のワンチップマイコンのソフトウェア処理に置き換えて構成したものを第2実施形態として以下に説明する。なお、次に述べる点以外は第1実施形態と同様であるので、同じ構成部材には同じ参照符号を付すこととし、主として相違点について説明する。
【0045】
図6は、本発明の第2実施形態に係るマイクロウエーブセンサ200の回路構成の概略図である。この図に示すように、RFモジュール2については第1実施形態と同一であり、信号処理部3aについてはIFアンプ34およびIFアンプ35までは第1実施形態と共通している。第1実施形態におけるコンパレータ36、コンパレータ37、電源33、移動距離計測部41、警告信号出力部42、草木対策レベル変更部43による各種信号処理や演算と同等の機能が、この第2実施形態ではすべてワンチップマイコン4に記憶されている制御用プログラムで実現されている。
【0046】
ワンチップマイコン4は入力ポート、A/D入力ポート、および出力ポートなどを有している。IFアンプ34からの出力(IFout1)およびIFアンプ35からの出力(IFout2)はそれぞれA/D入力ポートに接続されている。出力ポートから出力される警告信号Dout2は、検知対象物体が検知されたときにONとなる。
【0047】
図7は、本発明の第2実施形態に係るマイクロウエーブセンサ200のワンチップマイコン4で実行される制御用プログラムの概略処理のフローチャートである。
【0048】
この図7に示すように、処理の最初で警告信号Dout2がOFFに初期化される(ステップST101)。次に、IFout1およびIFout2の位相差が検出される(ステップST102)。そして、位相差の有無の判別が行われ(ステップST103)、位相差が検出されればステップST107に進み、そうでなければ次のステップST104に進む。
【0049】
位相差が検出されなかった場合は、草木対策レベル設定用のステータスカウンタSCの値を1減らす(ステップST104)。ここで、ステータスカウンタSCの値は0〜100の範囲内に制限されるものとし、その下限値である「0」との大小比較を行い(ステップST105)、「0」未満になっているときはステータスカウンタSCに下限値である「0」を設定し(ステップST106)、いずれにしてもステップST101に戻る。
【0050】
位相差が検出された場合は、検出された位相差をマイクロウエーブセンサ200からの相対距離に変換する演算が行われる(ステップST107)。さらに、「草木対策」を実施するために、相対距離の時間的な変化に基づいて物体の移動距離Δd(相対距離の単位時間当たりの変化量)を検出する(ステップST108)。
【0051】
次に、サブルーチン「草木対策レベル処理」をコールし、その時点のステータスカウンタSCの値に基づいて移動距離Δdの判定閾値となる草木対策レベルXを適切な値に設定するとともに、その時点のステータスカウンタSCの値、および移動距離Δdと草木対策レベルXとの差に基づいてステータスカウンタSCの値の変更を行う(ステップST109)。なお、このサブルーチン「草木対策レベル処理」における具体的な処理については、図8を参照して後述する。
【0052】
そして、移動距離Δdと草木対策レベルXの大小比較を行い(ステップST110)、移動距離Δdが草木対策レベルX以上のときは次のステップST111に進んで警告信号Dout2をONにした後に処理を終了する。移動距離Δdが草木対策レベルX未満だったときは、草木などの影響である可能性が高いため、ステップST101に戻る。
【0053】
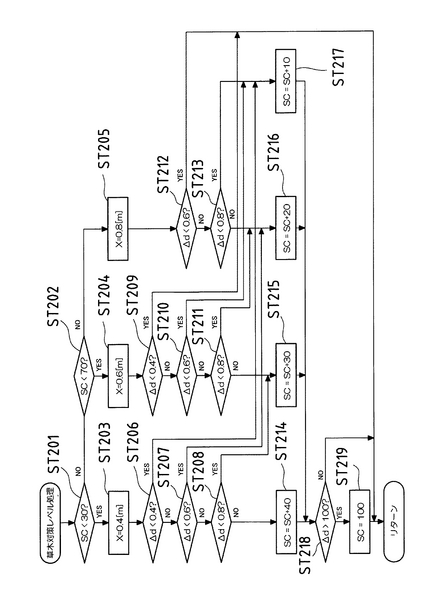
図8は、図7のフローチャート内の「草木対策レベル処理」サブルーチンで行われる概略処理のフローチャートである。
【0054】
この図8に示すように、草木対策レベルXは、ステータスカウンタSCが30未満のときは0.4mに設定され、ステータスカウンタSCが30以上かつ70未満のときは0.6mに設定され、ステータスカウンタSCが70以上のときは0.8mに設定される。
【0055】
そこで、まず、ステータスカウンタSCの値で場合分けを行い(ステップST201、ST202)、ステータスカウンタSCが30未満のときは草木対策レベルXを0.4mに設定し(ステップST203)、ステータスカウンタSCが30以上かつ70未満のときは草木対策レベルXを0.6mに設定し(ステップST204)、ステータスカウンタSCが70以上のときは草木対策レベルXを0.8mに設定する(ステップST205)。
【0056】
また、ステータスカウンタSCが30未満のときはさらに次のような処理を行い、移動距離Δdと草木対策レベルXとの差に基づいてステータスカウンタSCの値を変更する。すなわち、移動距離Δdの値で場合分けを行い(ステップST206〜ST208)、移動距離Δdが0.4m未満のときはステータスカウンタSCの値に10を加算し(ステップST217)、移動距離Δdが0.4m以上で0.6m未満のときはステータスカウンタSCの値に20を加算し(ステップST216)、移動距離Δdが0.6m以上で0.8m未満のときはステータスカウンタSCの値に30を加算し(ステップST215)、移動距離Δdが0.8m以上のときはステータスカウンタSCの値に40を加算し、(ステップST214)。いずれのときもステップST218に進む。
【0057】
ステータスカウンタSCが30以上かつ70未満のときはさらに次のような処理を行い、移動距離Δdと草木対策レベルXとの差に基づいてステータスカウンタSCの値を変更する。すなわち、移動距離Δdの値で場合分けを行い(ステップST209〜ST211)、移動距離Δdが0.4m以上で0.6m未満のときはステータスカウンタSCの値に10を加算し(ステップST217)、移動距離Δdが0.6m以上で0.8m未満のときはステータスカウンタSCの値に20を加算し(ステップST216)、移動距離Δdが0.8m以上のときはステータスカウンタSCの値に30を加算し(ステップST215)、いずれのときもステップST218に進む。なお、移動距離Δdが0.4m未満のときは、ステータスカウンタSCの値はそのままでリターンする。
【0058】
ステータスカウンタSCが70以上のときはさらに次のような処理を行い、移動距離Δdと草木対策レベルXとの差に基づいてステータスカウンタSCの値を変更する。すなわち、移動距離Δdの値で場合分けを行い(ステップST212、ST213)、移動距離Δdが0.6m以上で0.8m未満のときはステータスカウンタSCの値に10を加算し(ステップST217)、移動距離Δdが0.8m以上のときはステータスカウンタSCの値に20を加算し(ステップST216)、いずれのときもステップST218に進む。なお、移動距離Δdが0.6m未満のときは、ステータスカウンタSCの値はそのままでリターンする。
【0059】
また、ステータスカウンタSCの上限値は「100」であるので、変更後のステータスカウンタSCの値とこの上限値「100」との大小比較を行い(ステップST218)、「100」より大きくなっているときはステータスカウンタSCに上限値である「100」を設定する(ステップST219)。そして、いずれにしてもリターンして、このサブルーチンがコールされた図7のフローチャートに戻る。
【0060】
<その他の実施形態>
本発明の適用は、周波数の異なる2種類のマイクロ波を利用して検知対象物体を判定するようにしたマイクロウエーブセンサに限るものではなく、周波数の異なる3種類以上のマイクロ波を利用して検知対象物体を判定するようにしたマイクロウエーブセンサに適用してもよい。また、受動型赤外線センサとの組み合わせによってAND検知を行ういわゆるコンビネーションセンサとしてもよい。
【0061】
また、上述の各マイクロウエーブセンサ内の回路の一部などは、例えば、プログラマブル・ロジック・デバイス(PLD)、フィールド・プログラマブル・ゲート・アレイ(FPGA)などによっても容易に実現することができる。
【0062】
なお、本発明は、その精神または主要な特徴から逸脱することなく、他のいろいろな形で実施することができる。そのため、上述の実施形態はあらゆる点で単なる例示にすぎず、限定的に解釈してはならない。本発明の範囲は特許請求の範囲によって示すものであって、明細書本文には、なんら拘束されない。さらに、特許請求の範囲の均等範囲に属する変形や変更は全て本発明の範囲内のものである。
【図面の簡単な説明】
【0063】
【図1】本発明の第1実施形態に係るマイクロウエーブセンサの回路構成の概略図である。
【図2】2周波数タイプのマイクロウエーブセンサにおけるIF出力信号の波形図であり、(a)が一方のIFout1を示し、(b)が他方のIFout2を示す。
【図3】図2のIF出力信号を波形整形して得られる矩形波の波形図であり、(a)が一方の矩形波W1を示し、(b)が他方の矩形波W2を示す。
【図4】本発明の第1実施形態に係るマイクロウエーブセンサにおける草木対策レベルの設定例を示すグラフである。
【図5】本発明の第1実施形態に係るマイクロウエーブセンサにおける草木対策レベルの設定用ステータスカウンタに対する加減算の説明図である。
【図6】本発明の第2実施形態に係るマイクロウエーブセンサの回路構成の概略図である。
【図7】本発明の第2実施形態に係るマイクロウエーブセンサのワンチップマイコンで実行される制御用プログラムの概略処理のフローチャートである。
【図8】図7のフローチャート内の「草木対策レベル処理」サブルーチンで行われる概略処理のフローチャートである。
【図9】従来技術のマイクロウエーブセンサにおける草木対策レベルの設定例を示すグラフである。
【図10】従来技術のマイクロウエーブセンサにおける草木対策レベルの設定用ステータスカウンタに対する加減算の説明図である。
【符号の説明】
【0064】
100 マイクロウエーブセンサ(第1実施形態)
2 RFモジュール
21 発振器
22 変調器
23 送信アンテナ
24 受信アンテナ
25 ミキサ
3 信号処理部
31 電源
32 電源
33 電源
34 IFアンプ
35 IFアンプ
36 コンパレータ
37 コンパレータ
41 移動距離計測部
42 警告信号出力部
43 草木対策レベル変更部
200 マイクロウエーブセンサ(第2実施形態)
3a 信号処理部
4 ワンチップマイコン
【技術分野】
【0001】
本発明は、マイクロ波によって侵入者などを検出するマイクロウエーブセンサに関し、特に、本来の検知対象のみをより的確に検出するとともに誤報の発生を極力回避して信頼性を向上させたマイクロウエーブセンサに関する。
【背景技術】
【0002】
従来、防犯装置の一つとして、マイクロ波を検知エリアに向けて送信し、検知エリア内に人体(侵入者)が存在する場合には、その人体からの反射波(ドップラー効果によって変調したマイクロ波)を受信して人体を検知するマイクロウエーブセンサが知られている(例えば、特許文献1参照。)。
【0003】
さらに、マイクロウエーブセンサの1タイプとして、周波数の異なる複数のマイクロ波を利用して検知エリア内に存在する人体などの検知対象物体までの距離を計測するようにしたものも提案されている。この種のセンサは、例えば周波数の異なる2種類のマイクロ波を検知エリアに向けて送信し、それぞれの反射波に基づく2つのIF信号の位相差を検出するようになっている。この位相差は、検知対象物体までの距離に相関があり、検知対象物体までの距離が大きいほど位相差も大きくなる傾向がある。つまり、この位相差を求めることにより検知対象物体までの距離を計測することが可能である。また、この位相差の時間的な変化を認識することにより検知エリア内の検知対象物体が移動しているか否かを判定することも可能である。これにより、例えば検知エリア内で移動している検知対象物体のみを識別することが可能になる。
【0004】
例えば、周波数の異なる2種類のマイクロ波の反射波に基づくIF出力信号が図2(a)および(b)に示すような正弦波IFout1、IFout2(検知対象物体までの距離に応じた位相差を有している)である場合、これらのIF信号出力を波形整形して得られる矩形波W1、W2は、それぞれ図3(a)および(b)に示すようになる。そして、これらの矩形波W1、W2の位相差Δφ(図中における矩形波の立ち上がり部分の時間差Δtから換算)を検出することによって検知対象物体までの距離を計測することが可能になる。また、この矩形波W1、W2の位相差の時間的な変化を認識することにより、検知エリア内の検知対象物体の移動(センサに近づいているのか遠ざかっているのか)を認識することが可能である。
【0005】
ところで、この種のセンサを防犯用センサとして使用し、上記位相差の時間的な変化を認識して、検知エリア内で移動している検知対象物体のみを認識するようにした場合、次のような問題点があった。
【0006】
つまり、この種のセンサを屋外に設置した場合に、風による草木などの揺れによって上記矩形波W1、W2に位相差が生じ、これによって草木などを検知対象物体であると誤検知して誤報を発してしまう可能性がある。同様に、この種のセンサを屋内に設置した場合に、換気用のファンの回転動作や、風によるブラインドやカーテンの揺れ、あるいはマイクロウエーブセンサ自体の振動などによっても上記矩形波W1、W2に位相差が生じ、この場合にも人体以外の物体を検知対象物体であると誤検知して誤報を発してしまう可能性がある。
【0007】
そこで、本発明の発明者は、人体などの検知対象物体とそうでない物体(草木やファン等)との判別を正確に行って誤報を回避する技術について既に提案している(特許文献2参照。)。
【0008】
この提案は、各反射波に基づいて検知エリア内に存在する物体までの相対距離の単位時間当たりの変化量(物体の移動距離)を計測し、その移動距離が所定の判定閾値以上であるときにのみ、その物体を検知対象物体であると判定するものである。つまり、風によって揺れている草木や回転しているファン等は移動距離が僅かであるのに対し、人体などの検知対象物体では移動距離が大きくなるので、その差を認識することで検知対象物体であるか否かを的確に判定するようにしている。なお、以下の説明では、このような誤報防止対策を「草木対策」、上記の判定閾値を「草木対策レベル」と記すこととする。
【0009】
しかし、草木対策レベルを適切に設定することは難しい。つまり、草木対策レベルを低く(検知した物体の移動距離が短くても物体検知を行う状態に)設定してしまうと、風によって草木が数十cmの範囲で揺れている状況では、この草木を検知対象物体であると認識してしまって誤報が発生してしまう。特に、この種のマイクロウエーブセンサは、検知エリア内の人体からの赤外線を受けて人体と周囲温度との差から侵入者を検知する受動型赤外線センサ(PIRセンサ)と組み合わされて使用される場合が多いが(組み合わせセンサ)、このように草木対策レベルを低く設定した場合には、マイクロウエーブセンサは常時発報した状態になってしまう可能性がある。そうなると、PIRセンサ単体でセンサ装置を構成した場合と実質的に変わらなくなってしまい、組み合わせセンサとしての信頼性の低下を招いてしまう。
【0010】
逆に、草木対策レベルを高く(物体の総移動距離が長く(例えば100cm程度に)ならない限り物体検知を行わない状態に)設定してしまうと、検知エリア内を横切るように移動する人体(マイクロウエーブセンサとの相対距離の変化が少ない移動状態の物体)に対しては検知することが困難になり、この場合にもマイクロウエーブセンサの信頼性を確保することができない。
【0011】
そこで、マイクロウエーブセンサが設置されている場所のそのときの状況などに応じて、上述の草木対策レベルを自動的に複数段階に変化させることも考えられる。図9は、そのような従来技術のマイクロウエーブセンサにおける草木対策レベルの設定例を示すグラフである。図10は、この草木対策レベルの設定用ステータスカウンタに対する加減算の説明図である。ここで、ステータスカウンタSCとは、マイクロウエーブセンサの内部状態に対応するカウンタであり、その値は0〜100の範囲内に制限されているものとする。
【0012】
これらの図に示す設定例では、草木対策レベルは「なし」、「弱」、「強」の切り替えが可能となっている。具体的には、初期状態とステータスカウンタSCが30未満のときに草木対策レベルは0m(なし)に設定され、ステータスカウンタSCが30以上かつ70未満のときに草木対策レベルは0.4m(弱)に設定され、ステータスカウンタSCが70以上のときに草木対策レベルは0.6m(強)に設定される。
【0013】
そして、検知した物体の移動距離が草木対策レベルを超えたものの、例えば、組み合わされているPIRセンサでは何も検知していないことからそれが誤報であると判明した場合に、ステータスカウンタSCに一定値を加算するようにする。そうすると、このような誤報が複数回続くとステータスカウンタSCの値が増やされ、やがて草木対策レベルが1段階大きく設定されるので誤報が発生しにくくなる。それでも誤報がさらに続けば、草木対策レベルがもう1段階大きく設定され、誤報の発生が抑制されることになる。一方、物体が何も検知されていない状態が続いているときはこのステータスカウンタSCの値を少しずつ減算するようにする。
【0014】
つまり、上述のように草木対策レベルが一旦大きくなっても、誤報がない状態が継続すれば草木対策レベルも段階的に小さくなり、やがて0mまで戻り得る。このような構成にすることで、草木対策レベルを自動的に複数段階に変化させることができ、マイクロウエーブセンサの誤報の減少と信頼性の向上を図ることができる。
【特許文献1】特開平7−37176号公報
【特許文献2】特開2003−207462号公報
【発明の開示】
【発明が解決しようとする課題】
【0015】
ところが、このような構成では、ステータスカウンタSCの値を加算するのは、検知した物体の移動距離が草木対策レベルを超えるような誤報が続いたときである。そのため、検知した物体の移動距離がその時点の草木対策レベルにはわずかに届かないような状態が長時間続いても、ステータスカウンタSCの値が加算されることはない。その後、検知した物体の移動距離がその草木対策レベルをわずかに超えると、結果として誤報が発生してしまう。また、草木対策レベルが「なし」の状態のときには誤報がかなり発生しやすい不安定な状態になり得るという問題点もある。
【0016】
従来技術のこのような課題に鑑み、本発明の目的は、簡単な構成によって、風によって揺れている草木などと侵入者などの検知対象物体とをより的確に識別可能とすることで、誤報を極力防止するとともに動作の信頼性を高めたマイクロウエーブセンサを提供することである。
【課題を解決するための手段】
【0017】
上記目的を達成するため、本発明のマイクロウエーブセンサは、検知エリアに向けて周波数の異なる複数のマイクロ波を送信し、この検知エリア内に存在する検知対象物体からの前記マイクロ波それぞれの反射波に基づいてその検知対象物体までの距離を検知可能なマイクロウエーブセンサにおいて、検知された前記検知対象物体までの距離の単位時間当たりの変化量を前記検知対象物体の移動距離として計測する移動距離計測手段と、この移動距離計測手段によって計測された前記移動距離が所定の判定閾値以上である場合に警告信号を出力するように制御する警告信号出力制御手段と、前記移動距離が前記判定閾値以上である状態が第1所定期間以上継続したとき、および前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が所定値以内である状態が第2所定期間以上継続したときに、前記判定閾値をより大きな値に変更する判定閾値変更手段とを備えることを特徴とする。
【0018】
ここで、前記第1所定期間は前記第2所定期間以下となるように定める。ただし、これらの期間は必ずしも直接的な時間の単位で定めなくてもよい。例えば、何らかのカウンタを使用して、移動距離の計測回数に応じて定めるようにしてもよいが、これに限るものではない。また、前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が前記所定値より大きい状態が第3所定期間(前記第2所定期間以上となるように定める)以上継続したときには、前記判定閾値変更手段が前記判定閾値をより小さな値に変更するようにしておくことが好ましい。
【0019】
このような構成のマイクロウエーブセンサによれば、前記移動距離計測手段によって計測された前記移動距離が前記判定閾値よりわずかに小さい場合であっても、そのような状態がある程度の期間継続することにより、前記判定閾値がより大きな値に自動的に設定される。すなわち、実際に誤報が発生した場合だけでなく、誤報発生の可能性が高まりつつあるような状況を認識して前記判定閾値を予め大きくすることにより、実際の誤報の発生を未然に防止できる。これにより、誤報を極力回避して、動作の信頼性を高めることが可能となる。
【0020】
また、本発明のマイクロウエーブセンサにおいて、前記判定閾値は、0より大きい値を下限値とする所定範囲内に定めるようにしてもよい。例えば、前記判定閾値は、前記所定範囲内における段階的な値のいずれかとしてもよい。
【0021】
このような構成のマイクロウエーブセンサによれば、前記判定閾値が常に上記下限値以上の値に設定されているので、前記移動距離が極めて小さな値であって侵入者などである可能性が低いにも関わらず誤報を発生してしまうような不安定な状態となるような事態を排除できる。
【0022】
また、本発明のマイクロウエーブセンサにおいて、前記検知エリア内からの赤外線を受け、周囲との温度差から侵入物体を検知する受動型赤外線センサをさらに備え、この受動型赤外線センサが侵入物体を検知しているときのみ、前記警告信号の出力を許可することを特徴としてもよい。
【0023】
このような構成のマイクロウエーブセンサによれば、例え、前記移動距離と前記判定閾値との比較によって、風によって揺れている草木などを誤って侵入者などの検知対象物体であると判定した場合であっても、前記受動型赤外線センサが同時に侵入物体を検知していない限り、前記警告信号は出力されない。これにより、マイクロウエーブセンサ外部へ誤報が発せられることを防止できるため、動作の信頼性を一層高めることが可能となる。
【発明の効果】
【0024】
本発明のマイクロウエーブセンサによれば、実際に誤報が発生した場合だけでなく、誤報発生の可能性が高まりつつあるような状況を認識して、風によって揺れている草木などと侵入者などの検知対象物体とを識別するための判定閾値を予め変化させることにより、実際の誤報の発生を未然に防止できる。これにより、誤報を極力回避して、動作の信頼性を高めることが可能となる。
【発明を実施するための最良の形態】
【0025】
以下、本発明の実施形態を、図面を参照して説明する。ここでは、マイクロウエーブセンサを防犯センサとして使用した場合であって、周波数の異なる2種類のマイクロ波を利用して検知対象物体(侵入者等)を判定するようにしたマイクロウエーブセンサに本発明を適用した場合について説明する。
【0026】
<第1実施形態>
図1は、本発明の第1実施形態に係るマイクロウエーブセンサ100の回路構成の概略図である。図2は、このマイクロウエーブセンサ100のような2周波数タイプのマイクロウエーブセンサにおけるIF出力信号の波形図であり、(a)が一方のIFout1を示し、(b)が他方のIFout2を示す。図3は、これらのIF出力信号を波形整形して得られる矩形波の波形図であり、(a)が一方の矩形波W1を示し、(b)が他方の矩形波W2を示す。
【0027】
図1に示すように、このマイクロウエーブセンサ100は、マイクロ波の送受信などを行うRFモジュール2と、このRFモジュール2からの出力の処理などを行う信号処理部3とを備えている。
【0028】
RFモジュール2は、マイクロ波を発振する発振器21と、この発振器21から発振されるマイクロ波の周波数を切り換えるための変調器22と、発振器21から発振されたマイクロ波を検知エリアに向けて送信する送信アンテナ23と、人体などの物体によって反射されたマイクロ波の反射波を受信する受信アンテナ24と、この受信されたマイクロ波と発振器21の電圧波形とをミキシングして出力するミキサ25とを備えている。つまり、送信アンテナ23から検知エリアに向けて送信されたマイクロ波は、検知エリア内に物体が存在する場合、ドップラー効果によりその物体からの反射波の周波数が変調されて受信アンテナ24に受信される。この受信された反射波はミキサ25によって発振器21の電圧波形とミキシングされた後、RFモジュール2の出力側2aからIF出力信号(IFout0)としてアナログ信号処理部3に出力されるようになっている。
【0029】
信号処理部3は、送信アンテナ23から送信する各周波数のマイクロ波毎に対応して、IFアンプ34およびコンパレータ36を有する第1出力ラインL1と、IFアンプ35およびコンパレータ37を有する第2出力ラインL2と、コンパレータ36、37の基準電圧となる電源33とを備えている。さらに、RFモジュール2が2種類のマイクロ波を発振するための電源31、32が備えられ、コンパレータ36、37の出力側には移動距離計測部41、警告信号出力部42、草木対策レベル変更部43が設けられている。
【0030】
IFアンプ34、35は、第1スイッチSW1を介してRFモジュール2の出力側2aに接続されている。この第1スイッチSW1は、上記2種類のマイクロ波のうち一方が送信アンテナ23から送信されている場合には第1出力ラインL1に接続し、他方のマイクロ波が送信アンテナ23から送信されている場合には第2出力ラインL2に接続するように切り換えられる。つまり、一方のマイクロ波の送信時に物体によって反射された反射波に係るIF出力信号は第1出力ラインL1に出力され、他方のマイクロ波の送信時にその物体によって反射された反射波に係るIF出力信号は第2出力ラインL2に出力される構成となっている。
【0031】
また、電源31、32は、上記第1スイッチSW1に連動する第2スイッチSW2を介してRFモジュール2の入力側2bに接続されている。この第2スイッチSW2も、2種類のマイクロ波のうちいずれのマイクロ波を送信アンテナ23から送信するかによって、電源31、32に対する接続状態が切り換わるようになっている。つまり、この第2スイッチSW2が一方の電源31に接続している状態と他方の電源32に接続している状態とで、変調器22がマイクロ波の周波数を切り換え、これによって送信アンテナ23から送信されるマイクロ波の周波数が切り換えられる構成となっている。
【0032】
このようにして、第1スイッチSW1および第2スイッチSW2の切り換え動作に伴い、2つの処理動作(第1処理動作および第2処理動作)が所定時間間隔(例えば数msec間隔)をもって切り換えられるようになっている。ここで、第1処理動作とは、一方の周波数のマイクロ波が送信アンテナ23から検知エリアに向けて送信され、その反射波に基づくIF出力信号が信号処理部3の第1出力ラインL1に出力されてこの第1出力ラインL1において信号処理が行われる動作である。第2処理動作とは、他方の周波数のマイクロ波が送信アンテナ23から検知エリアに向けて送信され、その反射波に基づくIF出力信号が信号処理部3の第2出力ラインL2に出力されてこの第2出力ラインL2において信号処理が行われる動作である。そして、第1処理動作では、RFモジュール2から出力されたIF出力信号がIFアンプ34によって増幅され、このIFアンプ34からの出力(IFout1)がコンパレータ36によって矩形波W1に成形された後に移動距離計測部41に出力される。同様に、第2処理動作では、RFモジュール2から出力されたIF出力信号がIFアンプ35によって増幅され、このIFアンプ35からの出力(IFout2)がコンパレータ37によって矩形波W2に成形された後に移動距離計測部41に出力されるようになっている。
【0033】
検知エリア内に人体等の物体が存在していない場合には、送信アンテナ23から送信されたマイクロ波の周波数と受信アンテナ24に受信されたマイクロ波の周波数は等しいため、IFアンプ34、35からの出力信号におけるIF周波数は「0」となり、コンパレータ36、37からは信号が出力されない。これに対し、検知エリア内に人体等が存在する場合には、送信アンテナ23から送信されたマイクロ波の周波数に対して、受信アンテナ24に受信されたマイクロ波は変調されて周波数が異なっているため、コンパレータ36、37の出力信号波形には変化が生じ、この矩形波が移動距離計測部41に出力されるようになっている。
【0034】
移動距離計測部41は、コンパレータ36、37からの出力信号波形を受け、これら出力信号波形に基づいて検知エリア内に存在する物体までの相対距離を求める。上述したように、2つのIF出力信号(IFout1、IFout2)の位相差は物体までの相対距離に相関があり、物体までの相対距離が大きいほど位相差も大きくなる傾向があるので、この位相差から物体までの相対距離を求めることが可能である。さらに、これを継続的に行って時間的な変化を認識することにより、物体の単位時間当たりの移動距離Δd(速度ではなく、例えば1秒間に物体が実際に移動した距離)を計測する。
【0035】
警告信号出力部42は、移動距離計測部41から出力される物体の単位時間当たりの移動距離Δdを、風によって揺れている草木などであるか否かを判定するための判定閾値(草木対策レベルX)と大小比較する。移動距離Δdが草木対策レベルXより小さければ、検知された物体は草木などの可能性が高いため、警告信号Dout1の出力はOFF状態を保持する。一方、移動距離Δdが草木対策レベルX以上であれば、検知された物体は侵入者などである可能性が高いため、警告信号Dout1の出力をONとする。
【0036】
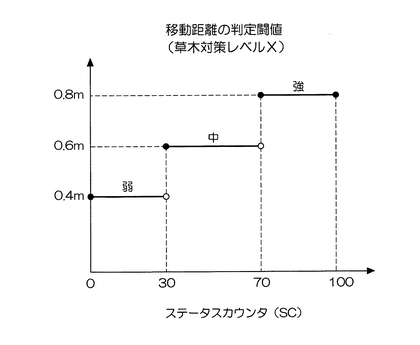
草木対策レベル変更部43は、警告信号出力部42で参照される草木対策レベルXを所定範囲内で自動的に複数段階で変化させる機能を有している。図4は、この草木対策レベルXの設定例を示すグラフである。図5は、この草木対策レベルXの設定用ステータスカウンタSCに対する加減算の説明図である。ここで、ステータスカウンタSCとは、マイクロウエーブセンサ100の内部状態に対応するカウンタであり、その値は0〜100の範囲内に制限されているものとする。
【0037】
図4に示すように、草木対策レベルXは「弱」、「中」、「強」の3段階に切り替えが可能となっている。具体的には、初期状態とステータスカウンタSCが30未満のときに草木対策レベルXは0.4m(弱)に設定され、ステータスカウンタSCが30以上かつ70未満のときに草木対策レベルXは0.6m(中)に設定され、ステータスカウンタSCが70以上のときに草木対策レベルXは0.8m(強)に設定される。
【0038】
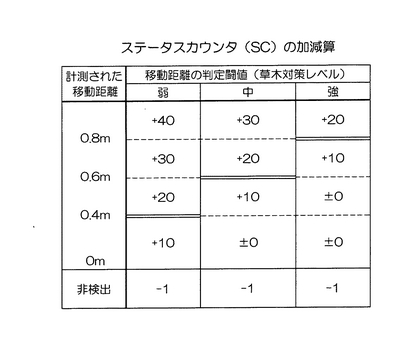
そして、検知した物体の移動距離Δdと草木対策レベルXとの大小関係やその差に基づいて、ステータスカウンタSCに対して図5に示すような加減算を行う。すなわち、移動距離Δdが草木対策レベルXを超えたものの、例えば、組み合わされているPIRセンサでは何も検知していないことからそれが誤報であると判明した場合には、移動距離Δdと草木対策レベルXとの差に応じてステータスカウンタSCへ20、30、40いずれかの加算を行う。また、移動距離Δdが草木対策レベルXを超えていなくてもそれらの差が小さいときにはステータスカウンタSCへ10の加算を行う。
【0039】
なお、移動距離Δdが草木対策レベルXを超えていないときの加算値は、移動距離Δdが草木対策レベルXを超えているときの加算値より小さいかため、草木対策レベルXが1段階大きくなるまでに要する加算回数は、移動距離Δdが草木対策レベルXを超えているときの方が少なくなる。
【0040】
一方、物体が何も検知されていない状態が続いているときは、このステータスカウンタSCの値を1ずつ減算するようにする。
【0041】
例えば、ステータスカウンタSCが初期状態で0である場合、草木対策レベルXは0.4m(弱)に設定されるが、そのときに計測された移動距離Δdが0.5mであったときはステータスカウンタSCに20が加算される。同じことがもう1回続けば、ステータスカウンタSCにさらに20が加算されて40となり、草木対策レベルXは1段階上の0.6m(中)に設定される。次に計測された移動距離Δdが0.7mであったときはステータスカウンタSCにさらに20が加算されて60となり、同じことがもう1回続けば、ステータスカウンタSCにさらに20が加算されて80となり、草木対策レベルXはもう1段階上の0.8m(強)に設定される。すなわち、このような場合は、草木対策レベルXが「弱」の状態から「強」まで達するのに要した移動距離Δdの計測回数は合計4回である。
【0042】
ステータスカウンタSCが初期状態で0である場合に計測された移動距離Δdが0.3mであったときはステータスカウンタSCに10が加算される。同じことがさらに2回(計3回)続けば、ステータスカウンタSCが30となり、草木対策レベルXは1段階上の0.6m(中)に設定される。次に計測された移動距離Δdが0.5mであったときはステータスカウンタSCに10が加算される。同じことがさらに3回(計4回)続けば、ステータスカウンタSCが70となり、草木対策レベルXはもう1段階上の0.8m(強)に設定される。すなわち、このような場合は、草木対策レベルXが「弱」の状態から「強」まで達するのに要した移動距離Δdの計測回数は合計7回である。
【0043】
また、ステータスカウンタSCが80に達して草木対策レベルXが「強」に設定された以降は移動距離Δdが検出されなくなったとすると、移動距離Δdの計測がさらに11回行われた後にステータスカウンタSCが69となって草木対策レベルXが「中」に設定され、移動距離Δdの計測がさらに40回行われた後にステータスカウンタSCが29となって草木対策レベルXが「弱」に設定される。 以上のような第1実施形態の構成によれば、検知した物体の移動距離Δdが草木対策レベルXよりわずかに小さい場合であっても、ステータスカウンタSCの値への加算が行われる。そして、そのような状態がある程度の期間継続すれば、草木対策レベルXが自動的に大きく設定される。すなわち、実際に誤報が発生した場合だけでなく、誤報発生の可能性が高まりつつあるような状況を認識して草木対策レベルXを予め大きくすることにより、実際の誤報の発生を未然に極力防止することが可能となる。また、草木対策レベルXの最小値を「0」とせず、最小値でも0.4mとすることにより、誤報が発生しやすい不安定な状態に一時的であっても陥ることを防止できる。
【0044】
<第2実施形態>
第1実施形態のマイクロウエーブセンサ100の信号処理部3の一部を機器組込用のワンチップマイコンのソフトウェア処理に置き換えて構成したものを第2実施形態として以下に説明する。なお、次に述べる点以外は第1実施形態と同様であるので、同じ構成部材には同じ参照符号を付すこととし、主として相違点について説明する。
【0045】
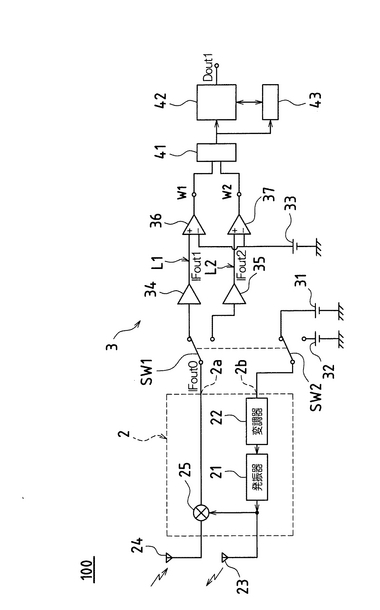
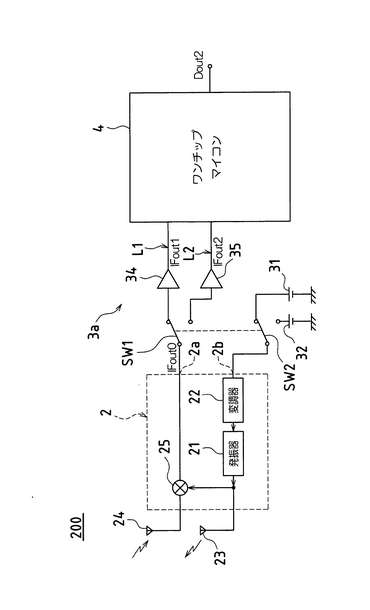
図6は、本発明の第2実施形態に係るマイクロウエーブセンサ200の回路構成の概略図である。この図に示すように、RFモジュール2については第1実施形態と同一であり、信号処理部3aについてはIFアンプ34およびIFアンプ35までは第1実施形態と共通している。第1実施形態におけるコンパレータ36、コンパレータ37、電源33、移動距離計測部41、警告信号出力部42、草木対策レベル変更部43による各種信号処理や演算と同等の機能が、この第2実施形態ではすべてワンチップマイコン4に記憶されている制御用プログラムで実現されている。
【0046】
ワンチップマイコン4は入力ポート、A/D入力ポート、および出力ポートなどを有している。IFアンプ34からの出力(IFout1)およびIFアンプ35からの出力(IFout2)はそれぞれA/D入力ポートに接続されている。出力ポートから出力される警告信号Dout2は、検知対象物体が検知されたときにONとなる。
【0047】
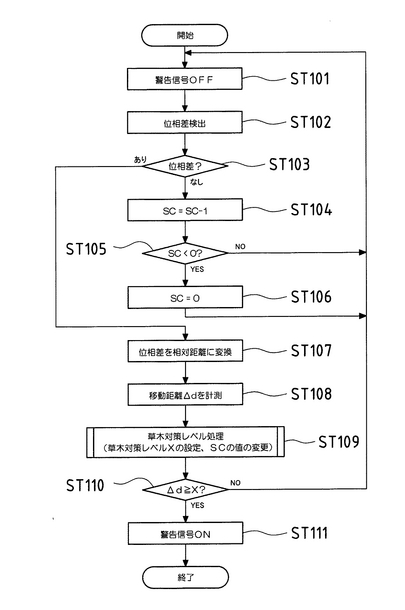
図7は、本発明の第2実施形態に係るマイクロウエーブセンサ200のワンチップマイコン4で実行される制御用プログラムの概略処理のフローチャートである。
【0048】
この図7に示すように、処理の最初で警告信号Dout2がOFFに初期化される(ステップST101)。次に、IFout1およびIFout2の位相差が検出される(ステップST102)。そして、位相差の有無の判別が行われ(ステップST103)、位相差が検出されればステップST107に進み、そうでなければ次のステップST104に進む。
【0049】
位相差が検出されなかった場合は、草木対策レベル設定用のステータスカウンタSCの値を1減らす(ステップST104)。ここで、ステータスカウンタSCの値は0〜100の範囲内に制限されるものとし、その下限値である「0」との大小比較を行い(ステップST105)、「0」未満になっているときはステータスカウンタSCに下限値である「0」を設定し(ステップST106)、いずれにしてもステップST101に戻る。
【0050】
位相差が検出された場合は、検出された位相差をマイクロウエーブセンサ200からの相対距離に変換する演算が行われる(ステップST107)。さらに、「草木対策」を実施するために、相対距離の時間的な変化に基づいて物体の移動距離Δd(相対距離の単位時間当たりの変化量)を検出する(ステップST108)。
【0051】
次に、サブルーチン「草木対策レベル処理」をコールし、その時点のステータスカウンタSCの値に基づいて移動距離Δdの判定閾値となる草木対策レベルXを適切な値に設定するとともに、その時点のステータスカウンタSCの値、および移動距離Δdと草木対策レベルXとの差に基づいてステータスカウンタSCの値の変更を行う(ステップST109)。なお、このサブルーチン「草木対策レベル処理」における具体的な処理については、図8を参照して後述する。
【0052】
そして、移動距離Δdと草木対策レベルXの大小比較を行い(ステップST110)、移動距離Δdが草木対策レベルX以上のときは次のステップST111に進んで警告信号Dout2をONにした後に処理を終了する。移動距離Δdが草木対策レベルX未満だったときは、草木などの影響である可能性が高いため、ステップST101に戻る。
【0053】
図8は、図7のフローチャート内の「草木対策レベル処理」サブルーチンで行われる概略処理のフローチャートである。
【0054】
この図8に示すように、草木対策レベルXは、ステータスカウンタSCが30未満のときは0.4mに設定され、ステータスカウンタSCが30以上かつ70未満のときは0.6mに設定され、ステータスカウンタSCが70以上のときは0.8mに設定される。
【0055】
そこで、まず、ステータスカウンタSCの値で場合分けを行い(ステップST201、ST202)、ステータスカウンタSCが30未満のときは草木対策レベルXを0.4mに設定し(ステップST203)、ステータスカウンタSCが30以上かつ70未満のときは草木対策レベルXを0.6mに設定し(ステップST204)、ステータスカウンタSCが70以上のときは草木対策レベルXを0.8mに設定する(ステップST205)。
【0056】
また、ステータスカウンタSCが30未満のときはさらに次のような処理を行い、移動距離Δdと草木対策レベルXとの差に基づいてステータスカウンタSCの値を変更する。すなわち、移動距離Δdの値で場合分けを行い(ステップST206〜ST208)、移動距離Δdが0.4m未満のときはステータスカウンタSCの値に10を加算し(ステップST217)、移動距離Δdが0.4m以上で0.6m未満のときはステータスカウンタSCの値に20を加算し(ステップST216)、移動距離Δdが0.6m以上で0.8m未満のときはステータスカウンタSCの値に30を加算し(ステップST215)、移動距離Δdが0.8m以上のときはステータスカウンタSCの値に40を加算し、(ステップST214)。いずれのときもステップST218に進む。
【0057】
ステータスカウンタSCが30以上かつ70未満のときはさらに次のような処理を行い、移動距離Δdと草木対策レベルXとの差に基づいてステータスカウンタSCの値を変更する。すなわち、移動距離Δdの値で場合分けを行い(ステップST209〜ST211)、移動距離Δdが0.4m以上で0.6m未満のときはステータスカウンタSCの値に10を加算し(ステップST217)、移動距離Δdが0.6m以上で0.8m未満のときはステータスカウンタSCの値に20を加算し(ステップST216)、移動距離Δdが0.8m以上のときはステータスカウンタSCの値に30を加算し(ステップST215)、いずれのときもステップST218に進む。なお、移動距離Δdが0.4m未満のときは、ステータスカウンタSCの値はそのままでリターンする。
【0058】
ステータスカウンタSCが70以上のときはさらに次のような処理を行い、移動距離Δdと草木対策レベルXとの差に基づいてステータスカウンタSCの値を変更する。すなわち、移動距離Δdの値で場合分けを行い(ステップST212、ST213)、移動距離Δdが0.6m以上で0.8m未満のときはステータスカウンタSCの値に10を加算し(ステップST217)、移動距離Δdが0.8m以上のときはステータスカウンタSCの値に20を加算し(ステップST216)、いずれのときもステップST218に進む。なお、移動距離Δdが0.6m未満のときは、ステータスカウンタSCの値はそのままでリターンする。
【0059】
また、ステータスカウンタSCの上限値は「100」であるので、変更後のステータスカウンタSCの値とこの上限値「100」との大小比較を行い(ステップST218)、「100」より大きくなっているときはステータスカウンタSCに上限値である「100」を設定する(ステップST219)。そして、いずれにしてもリターンして、このサブルーチンがコールされた図7のフローチャートに戻る。
【0060】
<その他の実施形態>
本発明の適用は、周波数の異なる2種類のマイクロ波を利用して検知対象物体を判定するようにしたマイクロウエーブセンサに限るものではなく、周波数の異なる3種類以上のマイクロ波を利用して検知対象物体を判定するようにしたマイクロウエーブセンサに適用してもよい。また、受動型赤外線センサとの組み合わせによってAND検知を行ういわゆるコンビネーションセンサとしてもよい。
【0061】
また、上述の各マイクロウエーブセンサ内の回路の一部などは、例えば、プログラマブル・ロジック・デバイス(PLD)、フィールド・プログラマブル・ゲート・アレイ(FPGA)などによっても容易に実現することができる。
【0062】
なお、本発明は、その精神または主要な特徴から逸脱することなく、他のいろいろな形で実施することができる。そのため、上述の実施形態はあらゆる点で単なる例示にすぎず、限定的に解釈してはならない。本発明の範囲は特許請求の範囲によって示すものであって、明細書本文には、なんら拘束されない。さらに、特許請求の範囲の均等範囲に属する変形や変更は全て本発明の範囲内のものである。
【図面の簡単な説明】
【0063】
【図1】本発明の第1実施形態に係るマイクロウエーブセンサの回路構成の概略図である。
【図2】2周波数タイプのマイクロウエーブセンサにおけるIF出力信号の波形図であり、(a)が一方のIFout1を示し、(b)が他方のIFout2を示す。
【図3】図2のIF出力信号を波形整形して得られる矩形波の波形図であり、(a)が一方の矩形波W1を示し、(b)が他方の矩形波W2を示す。
【図4】本発明の第1実施形態に係るマイクロウエーブセンサにおける草木対策レベルの設定例を示すグラフである。
【図5】本発明の第1実施形態に係るマイクロウエーブセンサにおける草木対策レベルの設定用ステータスカウンタに対する加減算の説明図である。
【図6】本発明の第2実施形態に係るマイクロウエーブセンサの回路構成の概略図である。
【図7】本発明の第2実施形態に係るマイクロウエーブセンサのワンチップマイコンで実行される制御用プログラムの概略処理のフローチャートである。
【図8】図7のフローチャート内の「草木対策レベル処理」サブルーチンで行われる概略処理のフローチャートである。
【図9】従来技術のマイクロウエーブセンサにおける草木対策レベルの設定例を示すグラフである。
【図10】従来技術のマイクロウエーブセンサにおける草木対策レベルの設定用ステータスカウンタに対する加減算の説明図である。
【符号の説明】
【0064】
100 マイクロウエーブセンサ(第1実施形態)
2 RFモジュール
21 発振器
22 変調器
23 送信アンテナ
24 受信アンテナ
25 ミキサ
3 信号処理部
31 電源
32 電源
33 電源
34 IFアンプ
35 IFアンプ
36 コンパレータ
37 コンパレータ
41 移動距離計測部
42 警告信号出力部
43 草木対策レベル変更部
200 マイクロウエーブセンサ(第2実施形態)
3a 信号処理部
4 ワンチップマイコン
【特許請求の範囲】
【請求項1】
検知エリアに向けて周波数の異なる複数のマイクロ波を送信し、この検知エリア内に存在する検知対象物体からの前記マイクロ波それぞれの反射波に基づいてその検知対象物体までの距離を検知可能なマイクロウエーブセンサにおいて、
検知された前記検知対象物体までの距離の単位時間当たりの変化量を前記検知対象物体の移動距離として計測する移動距離計測手段と、
この移動距離計測手段によって計測された前記移動距離が所定の判定閾値以上である場合に警告信号を出力するように制御する警告信号出力制御手段と、
前記移動距離が前記判定閾値以上である状態が第1所定期間以上継続したとき、および前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が所定値以内である状態が第2所定期間以上継続したときに、前記判定閾値をより大きな値に変更する判定閾値変更手段とを備えることを特徴とするマイクロウエーブセンサ。
【請求項2】
請求項1に記載のマイクロウエーブセンサにおいて、
前記判定閾値変更手段は、前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が前記所定値より大きい状態が第3所定期間以上継続したときに、前記判定閾値をより小さな値に変更することを特徴とするマイクロウエーブセンサ。
【請求項3】
請求項2に記載のマイクロウエーブセンサにおいて、
前記第1所定期間が前記第2所定期間以下であり、かつ、前記第2所定期間が前記第3所定期間以下となるように定めることを特徴とするマイクロウエーブセンサ。
【請求項4】
請求項3に記載のマイクロウエーブセンサにおいて、
前記判定閾値は、0より大きい値を下限値とする所定範囲内に定めることを特徴とするマイクロウエーブセンサ。
【請求項5】
請求項4に記載のマイクロウエーブセンサにおいて、
前記判定閾値は、前記所定範囲内における段階的な値のいずれかとすることを特徴とするマイクロウエーブセンサ。
【請求項6】
請求項1ないし5のいずれか1項に記載のマイクロウエーブセンサにおいて、
前記検知エリア内からの赤外線を受け、周囲との温度差から侵入物体を検知する受動型赤外線センサをさらに備え、
この受動型赤外線センサが侵入物体を検知しているときのみ、前記警告信号の出力を許可することを特徴とするマイクロウエーブセンサ。
【請求項1】
検知エリアに向けて周波数の異なる複数のマイクロ波を送信し、この検知エリア内に存在する検知対象物体からの前記マイクロ波それぞれの反射波に基づいてその検知対象物体までの距離を検知可能なマイクロウエーブセンサにおいて、
検知された前記検知対象物体までの距離の単位時間当たりの変化量を前記検知対象物体の移動距離として計測する移動距離計測手段と、
この移動距離計測手段によって計測された前記移動距離が所定の判定閾値以上である場合に警告信号を出力するように制御する警告信号出力制御手段と、
前記移動距離が前記判定閾値以上である状態が第1所定期間以上継続したとき、および前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が所定値以内である状態が第2所定期間以上継続したときに、前記判定閾値をより大きな値に変更する判定閾値変更手段とを備えることを特徴とするマイクロウエーブセンサ。
【請求項2】
請求項1に記載のマイクロウエーブセンサにおいて、
前記判定閾値変更手段は、前記移動距離が前記判定閾値未満であって前記判定閾値と前記移動距離との差が前記所定値より大きい状態が第3所定期間以上継続したときに、前記判定閾値をより小さな値に変更することを特徴とするマイクロウエーブセンサ。
【請求項3】
請求項2に記載のマイクロウエーブセンサにおいて、
前記第1所定期間が前記第2所定期間以下であり、かつ、前記第2所定期間が前記第3所定期間以下となるように定めることを特徴とするマイクロウエーブセンサ。
【請求項4】
請求項3に記載のマイクロウエーブセンサにおいて、
前記判定閾値は、0より大きい値を下限値とする所定範囲内に定めることを特徴とするマイクロウエーブセンサ。
【請求項5】
請求項4に記載のマイクロウエーブセンサにおいて、
前記判定閾値は、前記所定範囲内における段階的な値のいずれかとすることを特徴とするマイクロウエーブセンサ。
【請求項6】
請求項1ないし5のいずれか1項に記載のマイクロウエーブセンサにおいて、
前記検知エリア内からの赤外線を受け、周囲との温度差から侵入物体を検知する受動型赤外線センサをさらに備え、
この受動型赤外線センサが侵入物体を検知しているときのみ、前記警告信号の出力を許可することを特徴とするマイクロウエーブセンサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2006−309341(P2006−309341A)
【公開日】平成18年11月9日(2006.11.9)
【国際特許分類】
【出願番号】特願2005−128428(P2005−128428)
【出願日】平成17年4月26日(2005.4.26)
【出願人】(000103736)オプテックス株式会社 (116)
【Fターム(参考)】
【公開日】平成18年11月9日(2006.11.9)
【国際特許分類】
【出願日】平成17年4月26日(2005.4.26)
【出願人】(000103736)オプテックス株式会社 (116)
【Fターム(参考)】
[ Back to top ]