
マイクロバブルテスター

【課題】マイクロバブルテストの起泡作業やカウント精度による検者間での個人差が生じることがなく、また、検査作業の時間、手間やコストを低減しうるマイクロバブルテスターを提供する。
【解決手段】生体液を主成分とした検体Oを起泡して検体Oのマイクロバブルの発生状況を検知するマイクロバブルテスターであって、検体Oへの接触端子11を検体Oに接触させたまま回転させることで検体Oを起泡させる起泡手段1と、起泡させた検体Oを透視蓋22で閉蓋する閉蓋機構23と、透視蓋22を外側から検視して、起泡された検体Oに含まれる泡の数を認識する泡認識手段3とを具備することを特徴とする。
【解決手段】生体液を主成分とした検体Oを起泡して検体Oのマイクロバブルの発生状況を検知するマイクロバブルテスターであって、検体Oへの接触端子11を検体Oに接触させたまま回転させることで検体Oを起泡させる起泡手段1と、起泡させた検体Oを透視蓋22で閉蓋する閉蓋機構23と、透視蓋22を外側から検視して、起泡された検体Oに含まれる泡の数を認識する泡認識手段3とを具備することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、新生児(胎児)における肺の成熟度を判断するためのマイクロバブルテストを自動で行うマイクロバブルテスターに関する。
【背景技術】
【0002】
胎児の肺の成熟度は、母体の羊水または新生児の胃液に含まれる肺サーファクタントの量によって推測する。ここで肺サーファクタントとは、肺胞内で表面張力をコントロールし肺胞がつぶれるのを防ぐ物質であり、通常は在胎20週頃から生成され始め、胎児肺から羊水中へ移行する。在胎32〜36週頃に十分な量となる。ところが早産の場合、この肺サーファクタント量が不足している可能性がある。肺サーファクタントが不足していると、肺胞が徐々に潰れてしまうことで、胎児が呼吸窮迫症候群(RDS)を発症する可能性がある。前記呼吸窮迫症候群(RDS)への対策を講じるためにも、肺サーファクタント量を認識することが肝要である。
【0003】
この肺サーファクタント量の認識のために、マイクロバブルテストが行われる。これは、母体の羊水もしくは新生児の胃液を起泡し、発生する所定範囲の径のマイクロバブルの数量を数えることで、胎児の肺の成熟度を判断するものである。
【0004】
従来のマイクロバブルテストにおいては、例えば、バスツールピペットで泡を手作業によって作成し、カバーグラス上にとった起泡後の検体を、顕微鏡で5視野分観察し、直径15μm以下の泡の数を数え、各視野における平均値を算出するものであった(例えば、特許文献1参照)。
【0005】
これは具体的には、検体40μlをカバーグラスにとり、このカバーグラス上の検体を、バスツールピペットで泡立てる。次にこのカバーグラスを表裏反転させ、窪み穴状のホールを設けたホールグラスに乗せ、4分間静置する。これを、顕微鏡で一視野当り1mm2ずつ、五視野分観察する。一視野あたりで確認できる直径15μm以下の泡の数をカウントし、五視野の観察によるカウント数の平均値を算出するというものである。
【特許文献1】特開2002−114135号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、このような手作業によるマイクロバブルテストでは、起泡作業に習熟が必要であり、またマイクロバブルのカウント精度にも問題が生じうることから、検者間で検査結果に個人差が生じることがあった。また、検査作業に時間がかかり、検査に手間やコストがかかるものであった。
【0007】
そこで本願においては、マイクロバブルテストの起泡作業やカウント精度による検者間での個人差が生じることがなく、また、検査作業の時間或いは手間やコストの負担を軽減しうるマイクロバブルテスターを提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明では下記(1)ないし(7)の手段を講じている。
【0009】
(1)すなわち、本発明のマイクロバブルテスターは、生体液を主成分とした検体Oを起泡して検体Oのマイクロバブルの発生状況を検知するマイクロバブルテスターであって、検体Oへの接触端子11を検体Oに接触させたまま回転させることで検体Oを起泡させる起泡手段1と、起泡させた検体Oを透視蓋22で閉蓋する閉蓋機構23と、透視蓋22を外側から検視して、閉蓋された検体Oに含まれる泡の数を認識する泡認識手段3とを具備することを特徴とする。
【0010】
(2)また前記マイクロバブルテスターにおいて、閉蓋機構23が、透視蓋22を、検体Oの液面に対して斜めに接触する斜接触状態S5で接触させ、この斜接触状態S5から、検体Oの液面に対して平行に対向接触する対向接触状態S6とすることが好ましい。
【0011】
(3)また前記いずれかのマイクロバブルテスターにおいて、
起泡手段1が、接触端子11を下方先端に設けた回転部材11Hと、
この回転部材11Hを昇降させることで、接触端子11を、検体Oと離接させた離間状態S1ないし接触状態S2とする昇降機構12と、
前記接触状態S2において回転部材11Hを(回転軸L周りに)回転させる回転機構13と、
前記接触状態S2において検体Oの周囲を囲うことで検体Oの飛散を防止する飛散防止カバー14と、
前記離間状態S1において飛散防止カバー14を回転部材11Hに係止させる係止機構15とを備えてなり、
前記離間状態S1において、係止機構15が係止状態S4となって、飛散防止カバー14が昇降する回転部材11Hに吊り上げられ、
前記接触状態S2において、係止機構15が係止解除状態S3となって、飛散防止カバー14が検体O及び接触端子11を環囲する位置へ載置され、
この接触状態S2において、回転部材11Hが回転機構13によって回転して検体Oを起泡し、載置された飛散防止カバー14が検体Oの飛散を防止することが好ましい。
【0012】
このようなものであれば、回転部材11Hの昇降と共に、飛散防止カバー14を容易にセットし、或いはセット位置から容易に取り除くことができる。飛散防止カバー14のセットや取り除きを別途行う必要がないため、簡易な機構或いは簡易な手順で飛散防止しうる。
【0013】
また、セット後において、飛散防止カバーが係止解除状態S3となるため、回転部材11Hと共に回転することなく、検体Oの飛散を確実に防止しうる。
【0014】
さらに、離間状態S1において飛散防止カバー14が回転部材11Hに係止して一体的になるため、起泡後の、検体Oと接触した回転部材及び飛散防止カバーをまとめて容易に取り外し廃棄することができる。
【0015】
(4)また、前記マイクロバブルテスターにおいて、係止機構15が、飛散防止カバーの内側へ均一形状で突出した係止片15aと、回転部材11Hの周囲へ軸対称に張り出した被係止片15bとからなり、回転部材11Hの昇降時に係止片15aが被係止片15bに係止して、飛散防止カバーが回転部材の周囲均等位置にて係止状態S4となると共に、回転部材11Hの下降時に前記周囲均等位置のまま係止解除状態S3に移行することが好ましい。
【0016】
このようなものであれば、飛散防止カバー14のセット位置を適正なものに保つことができ、回転中の回転部材11Hと飛散防止カバー14との接触を確実に防止しうる。
【0017】
具体的には、係止片と係止片それぞれの係止面(孔空き円板の同心孔およびワッシャーの各周端面)をそれぞれ傾斜面とし、互いに対応するテーパー状に形成すれば、吊り上げたときに飛散防止カバー14の回転部材11Hへの芯合わせを自動的に行うことができ、飛散防止カバー14のセット位置を適正なものに保つ。
【0018】
(5)また前記いずれかのマイクロバブルテスターにおいて、回転部材11Hが、回転機構13の回転モーター軸13Lの先端たる軸端に同軸上に磁着して取り外し可能に固定され、前記回転モーター軸13Lに固定された状態で回転モーター軸13Lと同軸回転することが好ましい。
【0019】
このようなものであれば、回転部材11Hを回転モーター13Mへ容易に着脱することができ、測定時の回転部材11Hの取り付け作業や、起泡後に検体Oが付着した回転部材の取り除き作業が容易に行える。
【0020】
(6)また前記いずれかのマイクロバブルテスターにおいて、回転部材11Hが、回転軸L周りに回転するものであり、この回転軸Lは鉛直方向に対して所定の傾斜角度θで傾斜してなることが好ましい。回転軸Lが傾斜することで、鉛直方向を向いた回転軸Lと比べ、検体Oを効率的に起泡することができる。
【0021】
(7)また前記いずれかのマイクロバブルテスターにおいて、泡認識手段3が、検体Oの複数の深度断面において泡数を認識することが好ましい。微小な大きさのマイクロバブル、特に羊水のマイクロバブルは必要以上に偏平変形することがないため、複数の深度にて泡数をカウントすることで誤認を防ぎ、確実にカウントすることができる。
【0022】
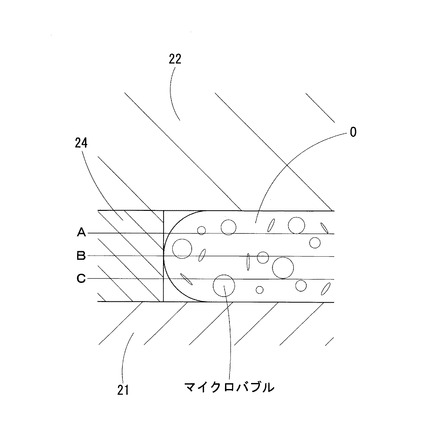
具体的には、複数の深度断面として、検体Oの側周囲を覆うスペーサー24の厚さ方向を少なくとも4等分した、検体Oの液内の3つ以上の断面で泡数をそれぞれ認識及びカウントし、各断面の泡数を平均した値を表示手段33の画面に出力表示することが好ましい(例えば図14)。
【0023】
なお前記マイクロバブルテスターにおいて、起泡手段1は、先端に接触端子11を有した回転部材11Hを備えてなり、この回転部材11Hの接触端子11を、昇降機構12によって昇降させ、任意の接触長さ又は任意の接触圧をもって検体Oに接触させるものであること、またこの接触状態S2のまま鉛直方向又は鉛直方向から傾斜した回転軸L周りに回転させるものであることが好ましい。
【0024】
また前記マイクロバブルテスターにおいて、回転部材11Hが、複数本の接触端子11たるブラシ毛を有した回転ブラシであり、回転部ブラシが回転した状態で少なくともいずれか複数本の接触端子11同士の間隔が、接触端子11の先端に向かって拡がってなることが好ましい。
【0025】
また前記マイクロバブルテスターにおいて、泡認識手段3が、検体Oの撮像を認識する撮像手段31と、検体O及び撮像手段31との間に介設される透視蓋22と、撮像手段31によって認識された撮像に含まれる所定範囲の径の泡の数を解析する解析部32とを備えてなることが好ましい。
【0026】
なお前記マイクロバブルテスターにおいて、泡認識手段3は、例えば顕微鏡等のように、拡大レンズを備えてなるものであってもよい。
【発明の効果】
【0027】
本願では、上記手段を採用することにより、検査結果にマイクロバブルテストの起泡作業やカウント精度による検者間での個人差が生じることがなく、また、検査作業の時間、手間やコストを低減しうるマイクロバブルテスターを提供することができる。
【発明を実施するための最良の形態】
【0028】
本発明の実施の形態について図面を参照して詳細に説明する。図1ないし図15は、本発明の実施例1のマイクロバブルテスターを示し、図16ないし図19は、実施例2のマイクロバブルテスターを示す。
【0029】
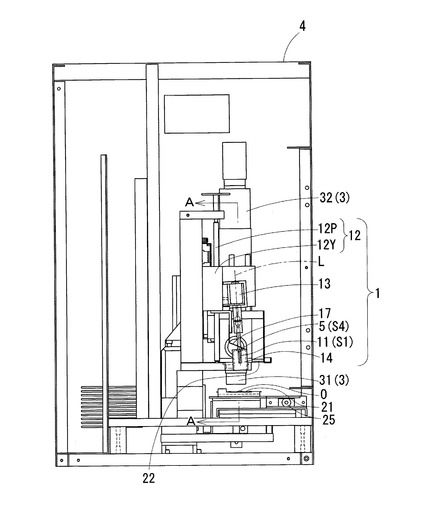
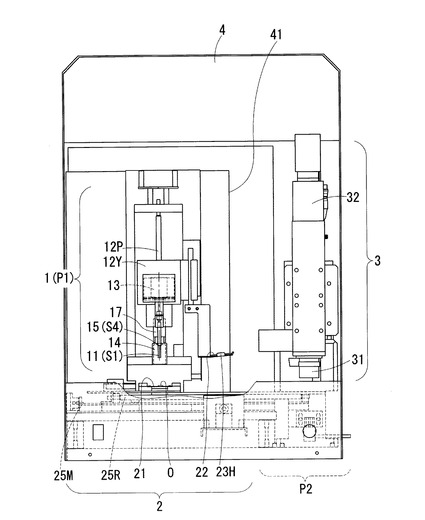
具体的には図1及び図2が、本発明の実施例1のマイクロバブルテスターの離間状態における全体構成を示す概観図であり、それぞれ側面図及び正面図である。
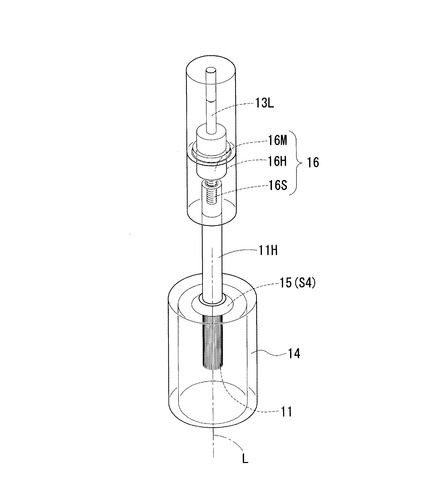
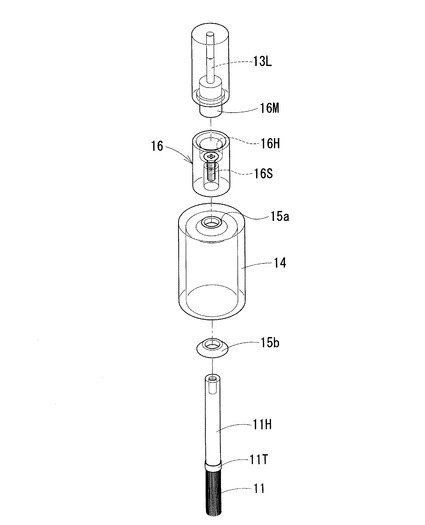
図3及び図4は実施例1の回転機構13について、回転部材11H及び回転モーター軸13Lの概観図及びその分解説明図を示す。
【0030】
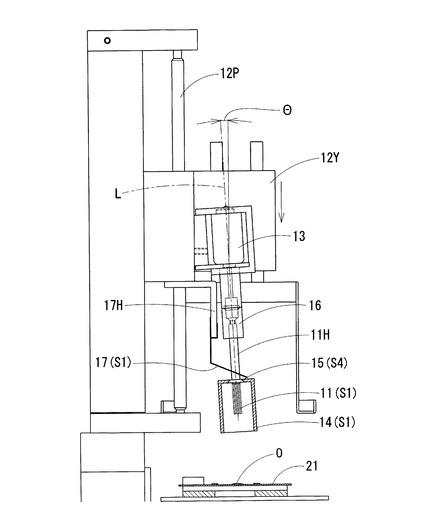
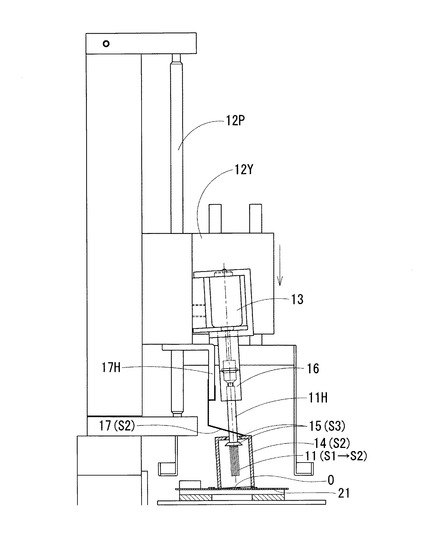
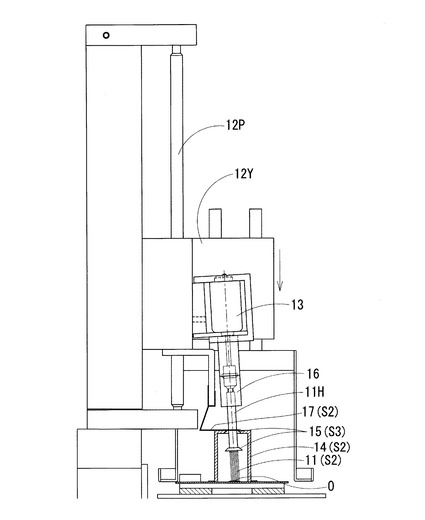
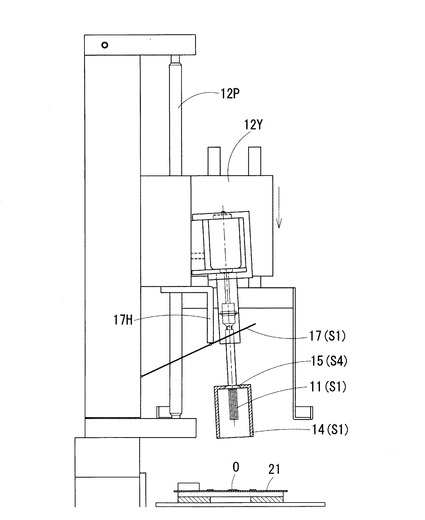
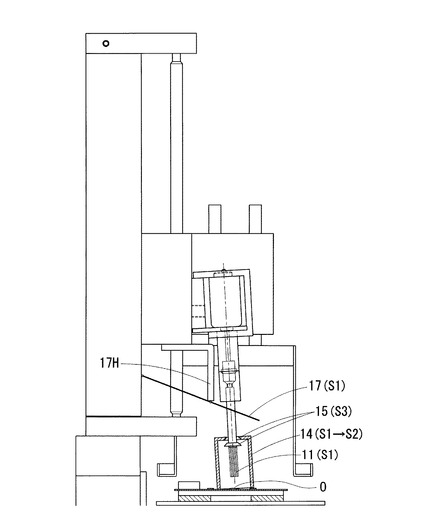
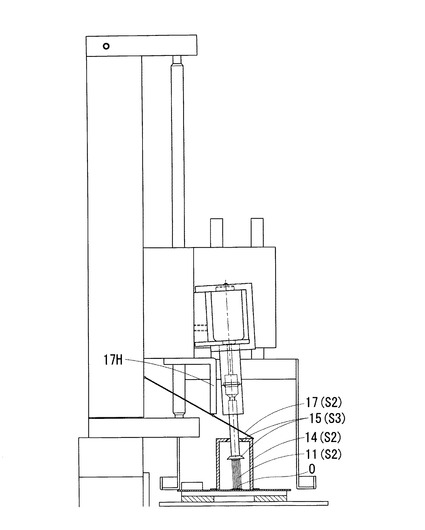
図5ないし図7は、実施例1の昇降機構12の作動状況について、それぞれ昇降ユニット12Yが上方位置ないし下端位置にあるときの側面視説明図である。各図の状態を詳述するに、図5では、接触端子11が離間状態S1、かつ係止機構15が係止状態S4にある。また図6では、接触端子11が離間状態S1、かつ係止機構15が係止状態S4から係止解除状態S3に移る過程の状態にある。そして図7では、接触端子11が接触状態S2、かつ係止機構15が係止解除状態S3にある。
【0031】
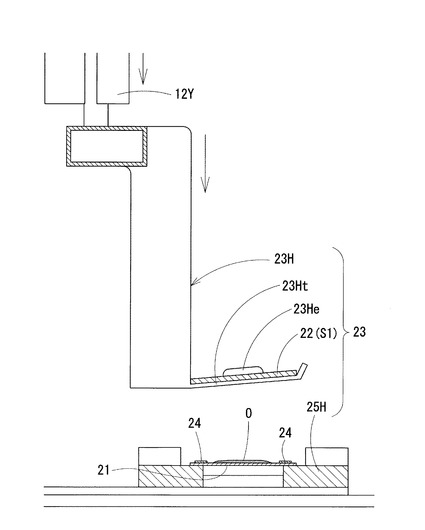
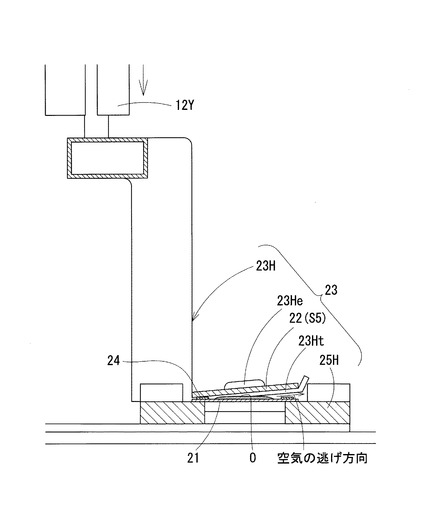
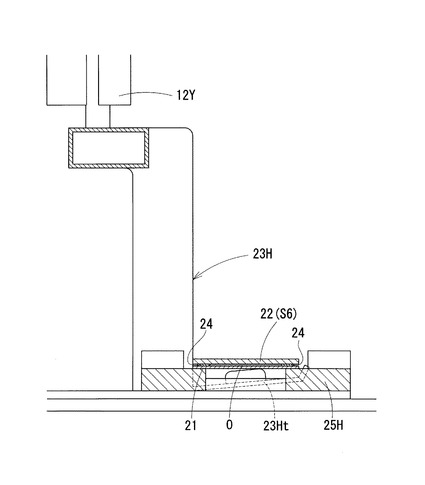
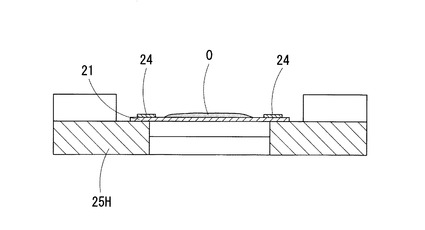
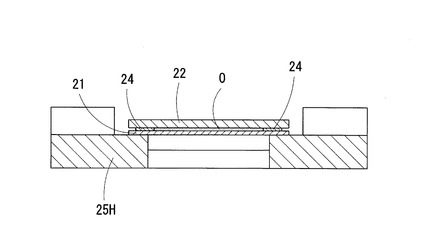
図8ないし図15は、実施例1の閉蓋機構23を示す説明図であり、このうち図8が蓋保持アーム23Hの斜視概観図である。また図9ないし図11は、実施例1の閉蓋機構23の作動状況について、それぞれ昇降ユニット12Yが上端位置ないし下端位置にあるときの側面視説明図である。各図の状態を詳述するに、図9は閉蓋前の状態、図10は閉蓋中の斜接触状態(空気の逃げている状態)、図11は閉蓋後の対向接触状態を、それぞれ側面視にて示すものである。また図12及び図13は、それぞれ図9及び図11の状態における載置板21の側面視説明図であり、さらに図14は図13(図11の状態)のうち検体Oを示す側面視拡大説明図である。また図15は図13(図11の状態)の載置板21及び透視蓋23を示す平面視説明図である。
【0032】
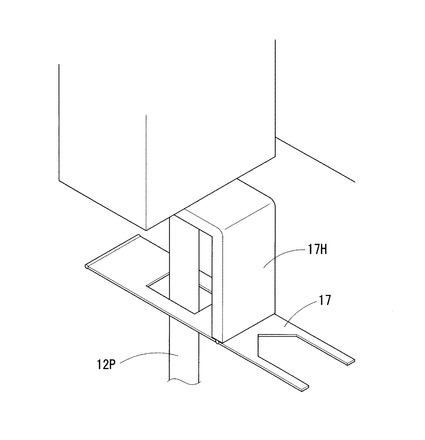
そして、図16が実施例2のマイクロバブルテスターのカバー押さえ板17の構成を示す斜視説明図である。
【0033】
図17ないし図19は、実施例2の昇降機構12の作動状況について、それぞれ昇降ユニット12Yが上端位置ないし下端位置にあるときの側面視説明図である。具体的には、図17では、接触端子11が離間状態S1、かつ係止機構15が係止状態S4にある。また図18では、接触端子11が離間状態S1、かつ係止機構15が係止状態S4から係止解除状態S3に移る過程の状態にある。そして図19では、接触端子11が接触状態S2、かつ係止機構15が係止解除状態S3にある。
【0034】
<本発明のマイクロバブルテスターの全体構成(図1)>
本発明のマイクロバブルテスターは、生体液を主成分とした検体Oを起泡して検体Oのマイクロバブルの発生状況を検知するものである。そして図1に示すように、起泡位置P1にて検体Oへの接触端子11を検体Oに接触させたまま回転させることで検体Oを起泡させる起泡手段と、閉蓋位置にて起泡させた検体Oを透視蓋22で閉蓋する閉蓋機構23と、泡認識位置P2にて透視蓋22を外側から検視して、閉蓋された検体Oに含まれる泡の数を認識する泡認識手段3と、そして検体Oを載置して各位置へ運搬する載置運搬手段2とを具備する。以下、実施例における各構成につき詳述する。
【0035】
(検体O)
本発明に言う検体Oは、起泡させた状態を観察することで状態を認識しうるものをいい、肺サーファクタントの量を測量する肺サーファクタント用のマイクロバブルテスターにおいては、主に母体の羊水または新生児の胃液である。実施例においては前記肺サーファクタント用のマイクロバブルテスターの検体Oとして、母体の羊水を示す。
〔起泡手段1〕
【0036】
起泡手段1は、検体Oと接触しうる接触端子11を有してなり、この接触端子11が検体Oに接触し、接触端子11と検体Oの相対位置を可変させることで検体Oを起泡させる手段である。起泡には種々の形態を採用することができるが、具体的には例えば、先端に接触端子11を有した回転部材11Hを備えてなり、検体Oに接触した接触端子11を回転させる。また、この回転部材11Hの接触端子11を、任意の接触長さ又は任意の接触圧をもって検体Oに接触させ、鉛直方向又は鉛直方向から傾斜した回転軸L周りに回転左右いずれか一方向又は両方向に回転させることで検体Oを起泡させるものである。
【0037】
実施例1の起泡手段1は具体的には、下方先端に設けた接触端子11を下端位置にて回転させうる回転機構13と、接触端子11を、検体Oと離間ないし接触させる上下端位置間(すなわち、検体O上方に離れた上端位置ないし検体Oに接触端子11が接触する下端位置の間の上下位置間)で移動させる昇降機構12と、下端位置にある回転部材11H及び検体Oの周囲を覆う飛散防止カバー14と、飛散防止カバー14及び接触端子11を係止させる係止機構15とを備えてなる。
【0038】
(回転部材11H)
回転部材11Hは、回転軸Lを中心軸として伸び、回転機構13の回転モーターによって回転する円柱型の棒体からなる。具体的には例えば、直径4mmの円筒型のシャフトからなり、複数本の接触端子11たるブラシ毛を下方先端に有する。
【0039】
実施例1においては、回転部材11Hの上方基端面が、連結ビス16Sによって、回転モーター軸13Lと磁着して同軸回転する短円柱状の連結機構16に螺合固定される(図3、4)。また回転部材11Hの外周には複数本の接触端子11が固定される。この回転部材11Hは、下端位置にて、静止状態の回転部材11Hの先端の接触端子11の少なくとも一部が検体Oと接触した状態となる。
【0040】
(接触端子11)
接触端子11は、細い線状のワイヤーブラシからなる。具体的には、直径0.1mmのワイヤが、回転部材11Hの先端付近の外周に沿って0.1mmの等間隔で軸先端方向を向いて固設される。回転部材11Hから先側に突出する接触端子11の開放長さは15mmである。
【0041】
回転部材11Hが静止した静止状態において、接触端子11の各本はいずれも回転軸L方向と平行な方向を向き、少なくともいずれか複数本の接触端子11同士の間隔は、接触端子11の基端(固定端)から先端(開放端)のいずれの位置にわたっても略等間隔である。
【0042】
一方、回転部材11Hが回転した回転状態において、少なくともいずれか複数本の接触端子11同士の間隔は、接触端子11の基端(固定端)から先端(開放端)へ向かうにしたがって拡がってなる。
【0043】
実施例の接触端子11は、平行に並べた複数のブラシ毛の一端をテープで固着してブラシテープ11Tとして束ね、このブラシテープ11Tを、円柱状の回転部材11Hの下方先端に巻回固着して形成している。このブラシテープ11Tが回転部材11Hの周面に段付き固定されることで周囲に膨出する。このためブラシテープ11Tは、ブラシテープ11Tよりも上部にて回転部材11Hに挿通された、係止片15aたるワッシャーの抜け止め機能、或いは、同じく回転部材11Hに挿通された、被係止片15bを有する飛散防止カバーの抜け止め機能を果たす(図3)。
【0044】
(回転軸L)
回転軸Lは、軸下方側が、側面視にて1度ないし10度、好ましくは2度〜5度の範囲の微小な傾斜角度θだけ鉛直方向に対して前方に傾いている。なお正面視にて鉛直方向である。これにより、水平面の液面の法線に対して(すなわち鉛直方向に対して)微小な傾斜角度θだけ回転ブラシが傾いて接触することとなる。具体的に言えば、接触端子11の低い側は、飛散防止カバー14と載置板21の接触面を周回する一方、高い側は、悲惨防止カバーの内壁に沿って周回する。これによって接触端子11の先端は、回転軸Lの平面視投射軸を長軸とする楕円軌道を描く。具体的には例えば、内径15mmの円上に接触端子11を配置し、回転軸Lの傾斜を鉛直方向に対して3度だけとしたとき、接触端子11の先端は、長径15.02mm、短径15mmの楕円軌道を描く。これにより、ブラシ上昇時には検体Oを掻き上げ、下降時すなわち検体Oの液中に戻るときに検体Oを剪断することとなり、また検体Oの攪拌を効率的に行うものとなる。
【0045】
(昇降機構12)
昇降機構12は、前記回転部材11Hを、検体Oの上方に離れた上端位置ないし検体Oのに接触端子が接触する下端位置の間、すなわち上下端位置間で昇降させる。具体的には、気泡位置P1に垂直方向に設置された昇降ポール12Pと、昇降ポール12Pに挿通されてこれに沿って上下に昇降運転するように制御される箱型の昇降ユニット12Yとを具備してなる(図1、2)。そしてこの昇降ユニット12Yには、箱型の正面前方から下方に向かって回転機構13が連結機構16によって着脱可能に固定され、箱型の底面から下方に向かってカバー押さえ板7が押さえ板固定アーム17Hによって固定され、そして箱型の閉蓋位置に近い側(実施例では正面視右側)の一側面から下方に向かって蓋保持アーム23Hが固定される(図1、2)。これら回転機構13、カバー押さえ板7、及び蓋保持アーム23Hは、昇降ユニット12Yと共に昇降する(図5ないし図7)。
【0046】
これによって、接触端子11を検体Oと離接させ、離間状態S1ないし接触状態S2とする。また、カバー押さえ板7を接地した飛散防止カバー14と離接させ、離間状態S1ないし接触状態S2とする。また、蓋保持アーム23Hの傾斜板23Ht上に保持した透視蓋22を板保持具25H上の載置板21と離接させ、離間状態S1ないし接触状態S2とし、さらに斜接触状態S5から対向接触状態S6とする。
【0047】
この昇降機構12によって、回転部材11Hが起泡可能な状態である接触状態S2にセットされる。この起泡可能な状態たる接触状態S2においては、接触端子11たる複数の接触端子11の少なくとも一部(実施例では全数の先端)が検体Oと接触する。
【0048】
好ましい回転位置たる回転部材11Hの下端位置(ブラシのセット高さ)は、静止状態において複数本ある接触端子11の全ての先端部が、載置板21たるガラスの表面と接触する高さである。たとえば載置板21の側方に配したセンサによって位置決めを行う。このセンサは、載置板21上面と接触端子11の空隙の有無を側面からの視認光によって判断する非接触視認センサであってもよく、接触端子11と載置板21の接触による圧力を検知する圧力センサであってもよい。このほか、接触端子11と載置板21を導電体からなるものとしておき、接触端子11と載置板21の接触による導電量を検知する導電センサなど、種々のセンサを使用することができる。
【0049】
液量130μlの場合、回転部材11Hの下端位置(ブラシのセット高さ)は、プラスマイナス1mm以内の誤差であることが好ましい。
【0050】
(回転機構13)
回転機構13は、接触端子11が検体Oと接触した前記接触状態S2において、回転部材11Hを回転軸L周りに回転させる機構である。具体的には回転モーター13Lと回転部材11Hとが、回転軸Lで同軸上に固定される。より具体的には、図3、4に示すように、モーター軸の先端と回転部材11Hの上方先端(基端)とが嵌合構造および嵌合構造内当接部での磁着によって取り外し可能に固定される。回転モーター軸13Lの下方先端には、連結磁性体16Mとして、角柱又は円柱状の磁石が固定される。また、回転部材11Hの上方基端には、角筒又は円筒状の連結穴16Hを同軸上に設けて、この連結穴16H内に連結磁性体16Mが嵌入するようにしており、これと共に、連結穴16Hの穴底に、磁着体からなる金属板を埋設している。この金属板は、実施例では円柱状の連結機構16と回転部材11Hとを連結する連結ビス16Sの皿状の頭部からなる。この連結ビス16Sの皿状の頭部が連結磁性体16Mの先端面と当接し、磁着して着脱可能に同軸固定される(図3、4)。
【0051】
この連結ビス16Sが、細棒状の回転部材11Hの上方基端面から螺入する際、回転部材11Hには予め、飛散防止カバー14の係止片15aたる孔空き板と、被係止片15bたるワッシャーとが通してある。そして図3に示すように、被係止片15bたるワッシャーが、回転部材11Hの下端側で膨出したブラシテープ11Tの段付き部上に係止し、そして係止片15aたる孔空き板が、被係止片15bたるワッシャーと、下方傾斜側面にて当接して係止する(図3)。
【0052】
(飛散防止カバー14)
飛散防止カバー14は、接触状態S2において、下端位置にある回転部材11H及び検体Oの周囲を環囲するように載置されることで、起泡時の検体Oの飛散を防止するものである。
【0053】
具体的には例えば、回転部材11H及び検体Oを囲いうる大きさの円筒体の上端に天井板を設けた、倒立容器状のカバーからなる。円筒体は特に起泡状態の様子を確認すべく、例えば内径15mmの光透過性部材(すなわち透明部材)が使用される。飛散防止カバー14は、昇降機構12によって起泡時に載置板21に接触して下面すべてが当接した位置まで降りる(図6、図7)。飛散防止カバー14が前記位置まで降りた接触状態S2において、カバー下縁辺が載置板21と密着した状態で、回転部材11Hが回転する(図7)。
【0054】
(係止機構15)
係止機構15は、接触端子11が検体Oと離間した離間状態S1において、飛散防止カバー14及び接触端子11を係止させる。具体的には係止機構15は、接触端子11が検体Oと接触した接触状態S2において係止解除状態S3となる(図7)と共に、接触端子11が検体Oと離間した離間状態S2において、飛散防止カバー14を回転部材11Hに係止させた係止状態S4となる。すなわち下端位置から上端位置へ向かうときに係止機構15が係止状態S4となり、飛散防止カバー14が吊り上げられる(図5)。また、飛散防止カバー14が接地する位置(図6)から下端位置(図7)までの下端位置付近にて、係止解除状態S3となる。
【0055】
実施例において、係止機構15は、筒状の飛散防止カバーの筒軸側に突出した係止片15aと、回転部材11Hの回転軸から周囲へ張り出した被係止片15bとからなる。
【0056】
係止片15aは例えば、円筒体の飛散防止カバー14の一端を蓋状に覆った円板に同心孔を形成した孔空き円板からなるものとすることができる。被係止片15bは例えば、回転部材11Hに挿通したワッシャーからなるものとすることができる(図4)。
【0057】
このように、筒状の飛散防止カバー14が回転部材11Hの周囲を囲うように係止することで、起泡後の回転部材Hの取り外し時、或いは閉蓋工程中の昇降ユニット12Yの昇降時において、検体Oが飛散したり手指等に付着することがない。使用後、検体の付着した回転部材11Hや飛散防止カバー14は廃棄する必要があるところ、検体Oの飛散や付着を防止することで、この廃棄作業を、不要な感染を防止しつつ衛生的に行うことができる。
【0058】
ここで係止片と係止片それぞれの係止面(孔空き円板の同心孔およびワッシャーの各周端面)をそれぞれ傾斜面とし、互いに対応するテーパー状に形成すれば、吊り上げたときに飛散防止カバー14の回転部材11Hへの芯合わせを自動的に行うことができ、飛散防止カバー14のセット位置を適正なものに保つ。飛散防止カバー14のセット位置を適正なものに保つことで、回転中の回転部材11Hと飛散防止カバー14との接触を確実に防止しうる。
【0059】
なお回転部材11Hの回転時には回転軸Lがぶれるため、飛散防止カバー14のセット位置がずれると回転中の回転部材11Hと飛散防止カバーとが接触しやすい。この接触によって、機械的起泡作業による正確な起泡度の測定が妨げられたり、飛散防止カバー14が浮き上がり機能しなくなったりする。
【0060】
(カバー押さえ板17)
実施例1のカバー押さえ板17は、先端が弾性部材たる板バネ部となった下部折曲弾性板からなり、図2、図5等に示すように、この板バネ部が下方傾斜した状態で、押さえ板固定アーム17Hを介して昇降ユニット12Yに固定される。この板バネ部は、昇降ユニット12Yが上端位置にあるとき、飛散防止カバー14の上方へ離間した状態となっている(図5)。
【0061】
また昇降ユニット12Yが上端位置から下端位置へ下降動作するとき、昇降ユニット12Yに固定された押さえ板固定アーム17H及びカバー押さえ板17が昇降ユニット12Yと共に降下する。飛散防止カバー14が接地した後も下降動作が続くことで、飛散防止カバー14の回転部材11Hに対する相対位置が上方へずれる。これにより、カバー押さえ板17は、飛散防止カバーの上面と接触した接触状態となる(例えば、図6ないし図7の状態)。この接触状態において、板バネ部は上方から飛散防止カバー14を弾性付勢し、飛散防止カバーの位置が変わらないように強固に位置固定する。
【0062】
実施例2のカバー押さえ板17は、図16に示すような中央孔及び先端切欠きを有した平板からなる。この平板は弾性板であり、中央孔に昇降機構12の昇降ポール12Pが貫通し、この中央孔よりも先端寄りの上面部が、昇降可能な押さえ板固定アーム17Hによって相対角度自在にヒンジ固定されると共に、基端辺が固定部にヒンジ固定される(図17参照)。
【0063】
実施例2の昇降ユニット12Yの昇降に伴い、昇降ユニット12Yに固定された押さえ板固定アーム17Hが昇降する。実施例2のカバー押さえ板17は、基端辺が固定部に、先端寄り上面部が押さえ板固定アーム17Hにそれぞれヒンジ固定されている。このため、押さえ板固定アーム17Hの昇降に伴い、カバー押さえ板17の基端辺が固定部に固定されたまま、カバー押さえ板17の先端辺が昇降する(図17ないし図19)。
【0064】
実施例2のカバー押さえ板17の先端辺付近は、中央に切欠きを有することで、実施例1と同様、板バネ部となっている。この板バネ部は、昇降ユニット12Yが上端位置にあるとき、飛散防止カバー14の上方へ離間した状態となっている(図17、18)。また昇降ユニット12Yが上端位置から下端位置へ下降動作するとき、昇降ユニット12Yに固定された押さえ板固定アーム17Hが昇降ユニット12Yと共に降下し、押さえ板固定アーム17Hに先端寄り位置でヒンジ固定されたカバー押さえ板17が、基端を支点として下方へ回転し、下方へ傾斜した状態となる。飛散防止カバー14が接地した後も下降動作が続くことで、飛散防止カバー14の回転部材11Hに対する相対位置が上方へずれる(図18)。こののち、カバー押さえ板17は、飛散防止カバーの上面と接触した接触状態となる(図19)。このカバー押さえ板17の飛散防止カバー14への接触状態において、板バネ部は上方から飛散防止カバー14を弾性付勢し、飛散防止カバーの位置が変わらないように強固に位置固定する。
〔載置運搬手段2〕
【0065】
(載置板21)
載置板21は、検体Oをその上に載置する板であり、例えばガラス板が使用される。検体Oが載置された載置板21は、起泡手段1によって起泡位置P1で検体Oが起泡された後、搬送手段25によって泡認識位置P2へ搬送され、透視蓋22たる透視蓋22たるスライドグラスを重ねた状態で泡認識手段3によって泡認識される。
【0066】
(スペーサー24)
載置板21の上面には、検体Oを載置する載置箇所を覆うようにして所定厚さのスペーサー24が配設される。スペーサー24は、後述する透視蓋22が載置板21を覆ったときに、透視蓋22が起泡された検体Oと接触して外方に拡がったり溢れ出たりするのを防ぐべく、載置板21の上面側に所定高さのスペースを確保するものである(図12、13)。実施例のスペーサー24として、所定厚さとして厚さ0.2mmのプラスチックテープを、載置板21の検体O載置箇所を囲う平面視四方枠状に貼付している(図15)。
【0067】
スペーサー24による、載置された検体Oの厚さを確保するための所定厚さは0.1mmないし0.5mm程度であることが好ましい。これは、透視蓋22たるスライドグラスを被せたときに検体Oが起泡されたまま平面方向に広がり、載置板21上に液層が確保されることで、泡認識のための視野範囲を広く確保できる厚さである。また、液層が厚すぎて透光量が減り、泡認識が困難になってしまうことのない厚さである。
【0068】
(閉蓋機構23)
閉蓋機構23は、透視蓋22を、検体Oの液面に斜接触状態S5で接触させてこの斜接触状態S5から傾斜角度を徐々に小さくする対向接触状態S6とするものである。これは、蓋保持アーム23Hが、先端に平行に設けた一対の傾斜板23Ht上に透視蓋22を載置保持したまま、下方の載置板21へ向かって下降して閉蓋することによって達成される(図9ないし図11)。
【0069】
斜接触状態S5から接触することで、検体Oの上部を閉蓋するときに透視蓋22と検体Oの間の空気を逃がすことができる(図10)。
【0070】
なお斜接触状態S5とは、検体Oの液面に対して傾斜させたまま接触する状態であり、対向接触状態S6とは、検体Oの液面に対して平行に対向接触する状態である。
【0071】
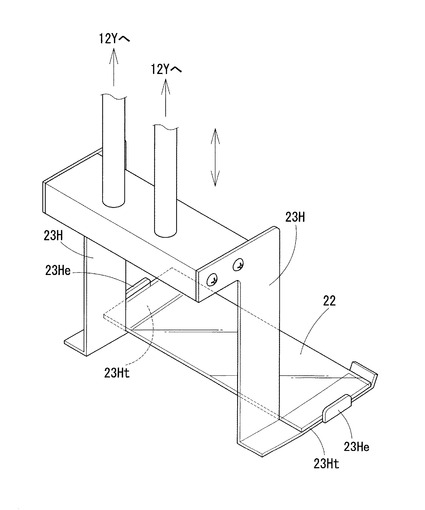
(蓋保持アーム23H)
蓋保持アーム23Hは具体的には、図8に示すように、透視蓋22の両端付近を、微小に傾斜した一対の傾斜板23Htで保持し、透視蓋22の両端辺の外側を各立設板23Heで囲うものとしている。また蓋保持アーム23Hは昇降機構12の昇降ユニット12Yに連結固定され、昇降機構12の昇降動作と共に昇降することで透視蓋22を載置板24上に載置するものとしている。
【0072】
(透視蓋22)
透視蓋22は、透光性泡認識手段3の撮像光が透過しうるだけの透光性を有する。撮像手段31による撮像焦点を透視蓋22の表面に定めることで、ピントのずれを無くし、撮像を鮮明化するものである。この透視蓋22は、検体O及び撮像手段31との間に介設され、泡認識手段3の撮像光を透過させる。
【0073】
実施例では、泡認識手段3による泡認識時に、載置板21の上方に、透視蓋22として比較的厚さに富んだスライドグラスを被せるものとしている(図13)。これは、顕微鏡等の撮像手段31による検視の際に、焦点位置としての平面を得るためのものである。すなわち、透視蓋22として薄い蓋板を使用すると、板面に微小なひずみが生じ、透視蓋22の面を基準位置としてオフセットした場合、泡認識において誤差が生じる場合がある。これに対して板面が平面に保たれ、不要なたわみの生じない十分な厚さの板体(例えば、スライドグラス)を使用すれば、透視蓋22の上面或いは下面を泡認識の基準位置としたときに、基準位置から所定距離だけ先の位置を認識する場合に、誤差の生じ難い均一的な認識位置となる。
【0074】
透視蓋22は、像拡大機能として、透視蓋22の上方から透視蓋22を介して透視蓋22下にある検体Oをみたとき、可視像たる検体Oの液面像を拡大する機能を備えたものであってもよい。また、整光機能として、平行に走る多数の突条やスリットによる一方向又は二方向フィルターによって、透視蓋22下方から透視蓋22を介して上方へ透過する光の方向を整える機能を備えたものでもよい(いずれも図示せず)。
【0075】
(搬送手段25)
搬送手段25は、少なくとも起泡位置P1及び泡認識位置P2の相互間で、検体Oを載置した載置板21を搬送する。
【0076】
気泡位置P1は、少なくとも起泡手段1による気泡を行う位置であり、図2の正面視左側である。この気泡位置P1に取り出し口41を設けており、気泡手段1のメンテナンスや以上動作時の対応を容易にしている。泡認識位置P2は、泡認識手段3による泡認識を行う位置であり、図2の正面視左側である。容積の嵩張る泡認識手段3の収容スペースを確保し、気泡位置P1とずれた静止位置で泡認識することで高い泡認識精度を確保している。
【0077】
実施例の搬送手段25は、ステッピングモーターによって正面視左右方向へ走る搬送レール25Rと、この搬送レール25R上を移動可能な載置板保持具25Hと、ステッピングモーターによって搬送レール25Rの正面視一端及び多端の間を移動させる搬送駆動機構25Mとを具備する。前記搬送レール25Rの正面視左端が起泡位置P1であり、正面視右端が泡認識位置P2である(図2)。搬送駆動機構25Mは、起泡位置P1を原点としてそこから正面視左側への移動量をパルス数で制御する。
〔認識手段〕
【0078】
(泡認識手段3)
泡認識手段3は、検体Oの複数の深度断面(例えば図14のA、B、Cで示すような、スペーサー24を厚さ方向に等分した各断面)において泡数を認識し、各断面の認識泡数を平均することで、起泡させた検体Oに含まれる泡の数、動向、大きさを識別する。図14で示すような複数の断面で視認することで、泡状にならない不純物の誤認識の割合を防ぎ、マイクロバブルの含有率をより精度よく把握することができる。
【0079】
具体的には泡認識手段3は、検体Oの液面上方から見た撮像を認識する撮像手段31と、検体O及び撮像手段31との間に介設される透視蓋22と、撮像手段31によって認識された撮像に含まれる所定範囲の径の泡の数を解析する解析部32とを備えてなる。また、この泡認識手段3は、拡大レンズ(顕微鏡)を備えてなることが好ましい。
【0080】
(撮像手段31)
撮像手段31は、検体Oの液面上方から見た撮像を認識する手段である。具体的には、CCDカメラ、顕微鏡、ルーペレンズ、反射鏡等の拡大鏡を含む、肉眼可視像の光学式撮像手段と、感熱センサ、音波センサ、赤外線センサを含む、肉眼不可視像或いは非光学式の撮像手段との両方が含まれる。
【0081】
(解析部32)
解析部32は、撮像手段31によって認識された撮像に含まれる所定範囲の径の泡の数を画像解析する。解析された画像、及び解析結果たる泡の大きさ毎の分布は、表示手段33によって、図6に示すような所定の表示画面にて患者名、患者ID及び診断医名と共に表示される。
〔その他〕
【0082】
(ケーシング4)
ケーシング4は、起泡手段1、飛散防止カバー14、載置板21、泡認識手段3、撮像手段31、搬送手段25といった各構成部品を覆う。ケーシング4には、検体Oを収納及び取り出す取り出し口41が、気泡位置P1及び閉蓋位置を含む大きさで備えられる。
【0083】
その他各部の具体的な構成は、上述した実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【0084】
(マイクロバブルテスト方法)
検体Oは、下記の工程を経たマイクロバブルテスト方法によって起泡及び泡数検出され、マイクロバブルテストが達成される。このマイクロバブルテスト方法は任意の機器或いは手作業によって行うことができるが、例えば、上記本発明のマイクロバブルテスターのような、機械的気泡手段を含むマイクロバブルテスターを用いて行うことが好ましい。
【0085】
(1)先ず、載置板21たるカバーガラスを、装置の起泡位置P1或いは起泡位置P1へ機械誘導される適宜位置へセットした後、セットした載置板21上面のうち、スペーサー24で囲われた中央部へ、検体Oを滴下する(図12、図15参照)。検体Oの滴下は、装置内に配備した自動滴下手段によるものでもよく、或いはピペット等を用いた手動滴下によるものでもよい。また載置板21のセットと滴下の順は前記と逆でもよく、検体O滴下の完了した載置板21を、滴下状態のまま装置の起泡位置P1或いは起泡位置P1へ機械誘導される位置へセットするものとしても良い。セット及び検体O滴下後の状態を図1、図2及び図5に示す。
【0086】
(2)次に、載置板21の上方へ、円筒状の飛散防止カバー14を昇降機構12の降下運転によって、飛散防止カバー14が載置板21に対して接触状態S2となるよようにセットする(図6)。このとき、飛散防止カバー14の一部が接地して接触状態S2となった後も引き続き昇降機構12の降下運転を続けることで、回転部材11Hに対する飛散防止カバー14の相対位置が上方にずれる。これにより、係止機構15が係止状態S4から係止解除状態S3となると共に、カバー押さえ板17が飛散防止カバー14の上面を押さえて飛散防止カバー14を位置固定した状態となる。
【0087】
なお手動で飛散防止カバー14を載置板21たるガラス上に載置してセットするものでも良い。
【0088】
(3)続けて、昇降機構12をさらに降下運転させて、接触端子11の少なくともいずれかが検体Oと接触する接触状態S2となるまでセットする(図7)。
【0089】
(4)次に、回転機構13によって、接触端子11たる回転ブラシを検体Oと先端接触させたまま回転させ、検体Oを気泡する。この回転状態において、接触端子11の先端部は、その間隔が広がりながら検体Oの内外を高速で回転移動する。このようにして検体Oに多くのマイクロバブルが発生する。
【0090】
(5)起泡後、昇降機構12の上昇運転によって、載置板21上から飛散防止カバー14を上方へ取り除く。検体Oの付着した飛散防止カバー及び回転部材11Hは、回転モーター軸13Mと連結した連結機構16の磁着連結を解除することで一体的に撤去及び廃棄する。
【0091】
(6)次に搬送手段25によって、載置板21を、起泡手段1を行う起泡位置P1から、閉蓋動作を行う閉蓋位置へ搬送する。
【0092】
(7)次に昇降機構12によって、蓋保持アーム23Hで傾斜保持した透視蓋22を、載置板21と離間した離間状態S1から、載置板21上へ接触する接触状態S2とする。このとき、斜接触状態S5から順に対向接触状態S6とすることで載置板21と透視蓋22との間の空気が一方向に逃げて余分な空気を含まない状態で閉蓋される。このような閉蓋によって気泡状態が確保されたままとなる。
(8)次に搬送手段25によって、載置板21を、閉蓋動作を行う閉蓋位置から泡認識位置P2へ搬送する。載置板21が泡認識位置P2へ搬送されたとき、顕微鏡の下方に予め固設された透視蓋22たるスライドグラスの下方直下へ載置板21がセットされ、載置板21の検体O上に透視蓋22たるスライドグラスが乗せられた状態となる。
【0093】
(9)次に、撮像部たる顕微鏡でピント調整をし、起泡後の検体Oの画像を取得する。
【0094】
(10)次に、撮像部で取得した画像を、解析部32によって解析し、画像に含まれる所定範囲の径の泡の数を自動的にカウントし、カウント数および解析画像を表示手段(図示せず)によって表示部へ表示する。
【0095】
(11)次に、載置板21を、搬送駆動機構25Mによって取り出し口41まで搬送し、検体Oを取り出し可能な状態とする。この後、取り出し口41から起泡後の検体を取り出す。このとき検体は閉蓋されているため手指等に検体Oが付着し難いものとなっている。
【0096】
(泡の立て方について)
回転部材11Hたる回転ブラシはディスポーサブルで使用する。これらは回転モーター13Mの一つの構成として備えられた、回路を制御するマイコンで設定される。
【0097】
前記回転モーター13Mによる回転手段の回転開始とともに、ブラシ先端部が遠心力により広がり、検体Oを剪断および撹拌しながら起泡する。ここで、回転手段の回転軸Lを、鉛直方向に対して1度〜10度、好ましくは2度〜5度の角度で傾斜させて配置させていることで、検体Oを掻き上げる効果が得られ、起泡効率が上がる。
【0098】
なお本実施例では、起泡時にブラシを押しつける必要はなく、前述のブラシが広がった状態で検体Oに触れる程度の高さであれば起泡可能である。
【0099】
起泡後、透視蓋22たるスライドグラスを重ねる。泡を残した状態を保つ為、載置板21と透視蓋22たる透視蓋22たるスライドグラスとの間に0.2mmのスペーサー24を設けてある。これにより、泡をつぶすことなく顕微鏡下で平面視認画像が得られることとなる。
【図面の簡単な説明】
【0100】
【図1】本発明の実施例1のマイクロバブルテスターの離間状態における全体構成を示す側面図である。
【図2】実施例1のマイクロバブルテスターの離間状態における全体構成を示す正面図である。
【図3】実施例1の回転部材11H及び回転モーター軸11Mを示す概観図である。
【図4】図3に示す実施例1の回転部材11H及び回転モーター軸11Mの分解説明図である。
【図5】実施例1のマイクロバブルテスターの昇降機構の作動状況であって、離間状態かつ係止状態S4を示す側面視説明図である。
【図6】実施例1のマイクロバブルテスターの昇降機構の作動状況であって、離間状態かつ係止状態S4から係止解除状態に移る過程を示す側面視説明図である。
【図7】実施例1のマイクロバブルテスターの昇降機構の作動状況であって、接触状態かつ係止解除状態を示す側面視説明図である。
【図8】実施例1のマイクロバブルテスターの蓋保持アーム23Hを示す斜視説明図である。
【図9】実施例1のマイクロバブルテスターの閉蓋機構23の作動状況であって、閉蓋前の状態を示す斜視説明図である。
【図10】実施例1のマイクロバブルテスターの閉蓋機構23の作動状況であって、斜接触状態を示す側面視説明図である。
【図11】実施例1のマイクロバブルテスターの閉蓋機構23の作動状況であって、対向接触状態を示す側面視説明図である。
【図12】実施例1のマイクロバブルテスターの閉蓋前の状態における載置板21を示す側面視説明図である。
【図13】実施例1のマイクロバブルテスターの閉蓋後の対向接触状態における載置板21及び透視蓋23を示す側面視説明図である。
【図14】図13に示す閉蓋後の対向接触状態における検体の状態を示す側面視拡大説明図である。
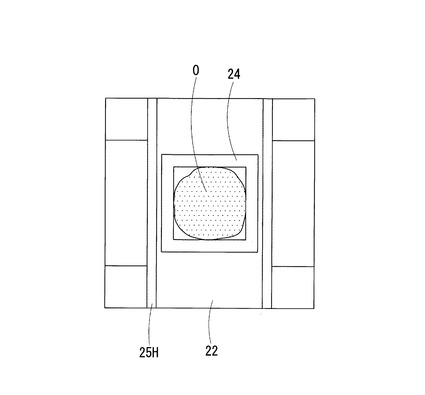
【図15】実施例1のマイクロバブルテスターの対向接触状態における載置板21及び透視蓋23を示す平面視説明図である。
【図16】実施例2のマイクロバブルテスターのカバー押さえ板17及びその周辺構成を示す斜視説明図である。
【図17】実施例2のマイクロバブルテスターの昇降機構の作動状況であって、離間状態かつ係止状態S4を示す側面視説明図である。
【図18】実施例2のマイクロバブルテスターの昇降機構の作動状況であって、離間状態かつ係止状態S4から係止解除状態に移る過程を示す側面視説明図である。
【図19】実施例2のマイクロバブルテスターの昇降機構の作動状況であって、接触状態かつ係止解除状態を示す側面視説明図である。
【符号の説明】
【0101】
1 起泡手段
11 接触端子(ブラシ毛)
11H 回転部材
11T ブラシテープ
12 昇降機構
12P 昇降ポール
12Y 昇降ユニット
13 回転機構
13L 回転モーター軸
14 飛散防止カバー
15 係止機構
15a 係止片(孔開き板)
15b 被係止片(ワッシャー)
16 連結機構
16M 連結磁性体
16H 連結穴
16S 連結ビス
17 カバー押さえ板
17H 押さえ板固定アーム
2 載置運搬手段
21 載置板
22 透視蓋(スライドグラス)
23 閉蓋機構
23H 蓋保持アーム
23Ht 傾斜板
23 閉蓋機構
24 スペーサー(プラスチックテープ)
25 搬送手段
25R 搬送レール
25H 板保持具
25M 搬送駆動機構
3 泡認識手段
31 撮像手段
32 解析部
4 ケーシング
41 取り出し口
L 回転軸
θ 傾斜角度
O 検体
P1 起泡位置
P2 泡認識位置
S1 離間状態
S2 接触状態
S3 係止解除状態
S4 係止状態S4
S5 斜接触状態
S6 対向接触状態
【技術分野】
【0001】
本発明は、新生児(胎児)における肺の成熟度を判断するためのマイクロバブルテストを自動で行うマイクロバブルテスターに関する。
【背景技術】
【0002】
胎児の肺の成熟度は、母体の羊水または新生児の胃液に含まれる肺サーファクタントの量によって推測する。ここで肺サーファクタントとは、肺胞内で表面張力をコントロールし肺胞がつぶれるのを防ぐ物質であり、通常は在胎20週頃から生成され始め、胎児肺から羊水中へ移行する。在胎32〜36週頃に十分な量となる。ところが早産の場合、この肺サーファクタント量が不足している可能性がある。肺サーファクタントが不足していると、肺胞が徐々に潰れてしまうことで、胎児が呼吸窮迫症候群(RDS)を発症する可能性がある。前記呼吸窮迫症候群(RDS)への対策を講じるためにも、肺サーファクタント量を認識することが肝要である。
【0003】
この肺サーファクタント量の認識のために、マイクロバブルテストが行われる。これは、母体の羊水もしくは新生児の胃液を起泡し、発生する所定範囲の径のマイクロバブルの数量を数えることで、胎児の肺の成熟度を判断するものである。
【0004】
従来のマイクロバブルテストにおいては、例えば、バスツールピペットで泡を手作業によって作成し、カバーグラス上にとった起泡後の検体を、顕微鏡で5視野分観察し、直径15μm以下の泡の数を数え、各視野における平均値を算出するものであった(例えば、特許文献1参照)。
【0005】
これは具体的には、検体40μlをカバーグラスにとり、このカバーグラス上の検体を、バスツールピペットで泡立てる。次にこのカバーグラスを表裏反転させ、窪み穴状のホールを設けたホールグラスに乗せ、4分間静置する。これを、顕微鏡で一視野当り1mm2ずつ、五視野分観察する。一視野あたりで確認できる直径15μm以下の泡の数をカウントし、五視野の観察によるカウント数の平均値を算出するというものである。
【特許文献1】特開2002−114135号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、このような手作業によるマイクロバブルテストでは、起泡作業に習熟が必要であり、またマイクロバブルのカウント精度にも問題が生じうることから、検者間で検査結果に個人差が生じることがあった。また、検査作業に時間がかかり、検査に手間やコストがかかるものであった。
【0007】
そこで本願においては、マイクロバブルテストの起泡作業やカウント精度による検者間での個人差が生じることがなく、また、検査作業の時間或いは手間やコストの負担を軽減しうるマイクロバブルテスターを提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明では下記(1)ないし(7)の手段を講じている。
【0009】
(1)すなわち、本発明のマイクロバブルテスターは、生体液を主成分とした検体Oを起泡して検体Oのマイクロバブルの発生状況を検知するマイクロバブルテスターであって、検体Oへの接触端子11を検体Oに接触させたまま回転させることで検体Oを起泡させる起泡手段1と、起泡させた検体Oを透視蓋22で閉蓋する閉蓋機構23と、透視蓋22を外側から検視して、閉蓋された検体Oに含まれる泡の数を認識する泡認識手段3とを具備することを特徴とする。
【0010】
(2)また前記マイクロバブルテスターにおいて、閉蓋機構23が、透視蓋22を、検体Oの液面に対して斜めに接触する斜接触状態S5で接触させ、この斜接触状態S5から、検体Oの液面に対して平行に対向接触する対向接触状態S6とすることが好ましい。
【0011】
(3)また前記いずれかのマイクロバブルテスターにおいて、
起泡手段1が、接触端子11を下方先端に設けた回転部材11Hと、
この回転部材11Hを昇降させることで、接触端子11を、検体Oと離接させた離間状態S1ないし接触状態S2とする昇降機構12と、
前記接触状態S2において回転部材11Hを(回転軸L周りに)回転させる回転機構13と、
前記接触状態S2において検体Oの周囲を囲うことで検体Oの飛散を防止する飛散防止カバー14と、
前記離間状態S1において飛散防止カバー14を回転部材11Hに係止させる係止機構15とを備えてなり、
前記離間状態S1において、係止機構15が係止状態S4となって、飛散防止カバー14が昇降する回転部材11Hに吊り上げられ、
前記接触状態S2において、係止機構15が係止解除状態S3となって、飛散防止カバー14が検体O及び接触端子11を環囲する位置へ載置され、
この接触状態S2において、回転部材11Hが回転機構13によって回転して検体Oを起泡し、載置された飛散防止カバー14が検体Oの飛散を防止することが好ましい。
【0012】
このようなものであれば、回転部材11Hの昇降と共に、飛散防止カバー14を容易にセットし、或いはセット位置から容易に取り除くことができる。飛散防止カバー14のセットや取り除きを別途行う必要がないため、簡易な機構或いは簡易な手順で飛散防止しうる。
【0013】
また、セット後において、飛散防止カバーが係止解除状態S3となるため、回転部材11Hと共に回転することなく、検体Oの飛散を確実に防止しうる。
【0014】
さらに、離間状態S1において飛散防止カバー14が回転部材11Hに係止して一体的になるため、起泡後の、検体Oと接触した回転部材及び飛散防止カバーをまとめて容易に取り外し廃棄することができる。
【0015】
(4)また、前記マイクロバブルテスターにおいて、係止機構15が、飛散防止カバーの内側へ均一形状で突出した係止片15aと、回転部材11Hの周囲へ軸対称に張り出した被係止片15bとからなり、回転部材11Hの昇降時に係止片15aが被係止片15bに係止して、飛散防止カバーが回転部材の周囲均等位置にて係止状態S4となると共に、回転部材11Hの下降時に前記周囲均等位置のまま係止解除状態S3に移行することが好ましい。
【0016】
このようなものであれば、飛散防止カバー14のセット位置を適正なものに保つことができ、回転中の回転部材11Hと飛散防止カバー14との接触を確実に防止しうる。
【0017】
具体的には、係止片と係止片それぞれの係止面(孔空き円板の同心孔およびワッシャーの各周端面)をそれぞれ傾斜面とし、互いに対応するテーパー状に形成すれば、吊り上げたときに飛散防止カバー14の回転部材11Hへの芯合わせを自動的に行うことができ、飛散防止カバー14のセット位置を適正なものに保つ。
【0018】
(5)また前記いずれかのマイクロバブルテスターにおいて、回転部材11Hが、回転機構13の回転モーター軸13Lの先端たる軸端に同軸上に磁着して取り外し可能に固定され、前記回転モーター軸13Lに固定された状態で回転モーター軸13Lと同軸回転することが好ましい。
【0019】
このようなものであれば、回転部材11Hを回転モーター13Mへ容易に着脱することができ、測定時の回転部材11Hの取り付け作業や、起泡後に検体Oが付着した回転部材の取り除き作業が容易に行える。
【0020】
(6)また前記いずれかのマイクロバブルテスターにおいて、回転部材11Hが、回転軸L周りに回転するものであり、この回転軸Lは鉛直方向に対して所定の傾斜角度θで傾斜してなることが好ましい。回転軸Lが傾斜することで、鉛直方向を向いた回転軸Lと比べ、検体Oを効率的に起泡することができる。
【0021】
(7)また前記いずれかのマイクロバブルテスターにおいて、泡認識手段3が、検体Oの複数の深度断面において泡数を認識することが好ましい。微小な大きさのマイクロバブル、特に羊水のマイクロバブルは必要以上に偏平変形することがないため、複数の深度にて泡数をカウントすることで誤認を防ぎ、確実にカウントすることができる。
【0022】
具体的には、複数の深度断面として、検体Oの側周囲を覆うスペーサー24の厚さ方向を少なくとも4等分した、検体Oの液内の3つ以上の断面で泡数をそれぞれ認識及びカウントし、各断面の泡数を平均した値を表示手段33の画面に出力表示することが好ましい(例えば図14)。
【0023】
なお前記マイクロバブルテスターにおいて、起泡手段1は、先端に接触端子11を有した回転部材11Hを備えてなり、この回転部材11Hの接触端子11を、昇降機構12によって昇降させ、任意の接触長さ又は任意の接触圧をもって検体Oに接触させるものであること、またこの接触状態S2のまま鉛直方向又は鉛直方向から傾斜した回転軸L周りに回転させるものであることが好ましい。
【0024】
また前記マイクロバブルテスターにおいて、回転部材11Hが、複数本の接触端子11たるブラシ毛を有した回転ブラシであり、回転部ブラシが回転した状態で少なくともいずれか複数本の接触端子11同士の間隔が、接触端子11の先端に向かって拡がってなることが好ましい。
【0025】
また前記マイクロバブルテスターにおいて、泡認識手段3が、検体Oの撮像を認識する撮像手段31と、検体O及び撮像手段31との間に介設される透視蓋22と、撮像手段31によって認識された撮像に含まれる所定範囲の径の泡の数を解析する解析部32とを備えてなることが好ましい。
【0026】
なお前記マイクロバブルテスターにおいて、泡認識手段3は、例えば顕微鏡等のように、拡大レンズを備えてなるものであってもよい。
【発明の効果】
【0027】
本願では、上記手段を採用することにより、検査結果にマイクロバブルテストの起泡作業やカウント精度による検者間での個人差が生じることがなく、また、検査作業の時間、手間やコストを低減しうるマイクロバブルテスターを提供することができる。
【発明を実施するための最良の形態】
【0028】
本発明の実施の形態について図面を参照して詳細に説明する。図1ないし図15は、本発明の実施例1のマイクロバブルテスターを示し、図16ないし図19は、実施例2のマイクロバブルテスターを示す。
【0029】
具体的には図1及び図2が、本発明の実施例1のマイクロバブルテスターの離間状態における全体構成を示す概観図であり、それぞれ側面図及び正面図である。
図3及び図4は実施例1の回転機構13について、回転部材11H及び回転モーター軸13Lの概観図及びその分解説明図を示す。
【0030】
図5ないし図7は、実施例1の昇降機構12の作動状況について、それぞれ昇降ユニット12Yが上方位置ないし下端位置にあるときの側面視説明図である。各図の状態を詳述するに、図5では、接触端子11が離間状態S1、かつ係止機構15が係止状態S4にある。また図6では、接触端子11が離間状態S1、かつ係止機構15が係止状態S4から係止解除状態S3に移る過程の状態にある。そして図7では、接触端子11が接触状態S2、かつ係止機構15が係止解除状態S3にある。
【0031】
図8ないし図15は、実施例1の閉蓋機構23を示す説明図であり、このうち図8が蓋保持アーム23Hの斜視概観図である。また図9ないし図11は、実施例1の閉蓋機構23の作動状況について、それぞれ昇降ユニット12Yが上端位置ないし下端位置にあるときの側面視説明図である。各図の状態を詳述するに、図9は閉蓋前の状態、図10は閉蓋中の斜接触状態(空気の逃げている状態)、図11は閉蓋後の対向接触状態を、それぞれ側面視にて示すものである。また図12及び図13は、それぞれ図9及び図11の状態における載置板21の側面視説明図であり、さらに図14は図13(図11の状態)のうち検体Oを示す側面視拡大説明図である。また図15は図13(図11の状態)の載置板21及び透視蓋23を示す平面視説明図である。
【0032】
そして、図16が実施例2のマイクロバブルテスターのカバー押さえ板17の構成を示す斜視説明図である。
【0033】
図17ないし図19は、実施例2の昇降機構12の作動状況について、それぞれ昇降ユニット12Yが上端位置ないし下端位置にあるときの側面視説明図である。具体的には、図17では、接触端子11が離間状態S1、かつ係止機構15が係止状態S4にある。また図18では、接触端子11が離間状態S1、かつ係止機構15が係止状態S4から係止解除状態S3に移る過程の状態にある。そして図19では、接触端子11が接触状態S2、かつ係止機構15が係止解除状態S3にある。
【0034】
<本発明のマイクロバブルテスターの全体構成(図1)>
本発明のマイクロバブルテスターは、生体液を主成分とした検体Oを起泡して検体Oのマイクロバブルの発生状況を検知するものである。そして図1に示すように、起泡位置P1にて検体Oへの接触端子11を検体Oに接触させたまま回転させることで検体Oを起泡させる起泡手段と、閉蓋位置にて起泡させた検体Oを透視蓋22で閉蓋する閉蓋機構23と、泡認識位置P2にて透視蓋22を外側から検視して、閉蓋された検体Oに含まれる泡の数を認識する泡認識手段3と、そして検体Oを載置して各位置へ運搬する載置運搬手段2とを具備する。以下、実施例における各構成につき詳述する。
【0035】
(検体O)
本発明に言う検体Oは、起泡させた状態を観察することで状態を認識しうるものをいい、肺サーファクタントの量を測量する肺サーファクタント用のマイクロバブルテスターにおいては、主に母体の羊水または新生児の胃液である。実施例においては前記肺サーファクタント用のマイクロバブルテスターの検体Oとして、母体の羊水を示す。
〔起泡手段1〕
【0036】
起泡手段1は、検体Oと接触しうる接触端子11を有してなり、この接触端子11が検体Oに接触し、接触端子11と検体Oの相対位置を可変させることで検体Oを起泡させる手段である。起泡には種々の形態を採用することができるが、具体的には例えば、先端に接触端子11を有した回転部材11Hを備えてなり、検体Oに接触した接触端子11を回転させる。また、この回転部材11Hの接触端子11を、任意の接触長さ又は任意の接触圧をもって検体Oに接触させ、鉛直方向又は鉛直方向から傾斜した回転軸L周りに回転左右いずれか一方向又は両方向に回転させることで検体Oを起泡させるものである。
【0037】
実施例1の起泡手段1は具体的には、下方先端に設けた接触端子11を下端位置にて回転させうる回転機構13と、接触端子11を、検体Oと離間ないし接触させる上下端位置間(すなわち、検体O上方に離れた上端位置ないし検体Oに接触端子11が接触する下端位置の間の上下位置間)で移動させる昇降機構12と、下端位置にある回転部材11H及び検体Oの周囲を覆う飛散防止カバー14と、飛散防止カバー14及び接触端子11を係止させる係止機構15とを備えてなる。
【0038】
(回転部材11H)
回転部材11Hは、回転軸Lを中心軸として伸び、回転機構13の回転モーターによって回転する円柱型の棒体からなる。具体的には例えば、直径4mmの円筒型のシャフトからなり、複数本の接触端子11たるブラシ毛を下方先端に有する。
【0039】
実施例1においては、回転部材11Hの上方基端面が、連結ビス16Sによって、回転モーター軸13Lと磁着して同軸回転する短円柱状の連結機構16に螺合固定される(図3、4)。また回転部材11Hの外周には複数本の接触端子11が固定される。この回転部材11Hは、下端位置にて、静止状態の回転部材11Hの先端の接触端子11の少なくとも一部が検体Oと接触した状態となる。
【0040】
(接触端子11)
接触端子11は、細い線状のワイヤーブラシからなる。具体的には、直径0.1mmのワイヤが、回転部材11Hの先端付近の外周に沿って0.1mmの等間隔で軸先端方向を向いて固設される。回転部材11Hから先側に突出する接触端子11の開放長さは15mmである。
【0041】
回転部材11Hが静止した静止状態において、接触端子11の各本はいずれも回転軸L方向と平行な方向を向き、少なくともいずれか複数本の接触端子11同士の間隔は、接触端子11の基端(固定端)から先端(開放端)のいずれの位置にわたっても略等間隔である。
【0042】
一方、回転部材11Hが回転した回転状態において、少なくともいずれか複数本の接触端子11同士の間隔は、接触端子11の基端(固定端)から先端(開放端)へ向かうにしたがって拡がってなる。
【0043】
実施例の接触端子11は、平行に並べた複数のブラシ毛の一端をテープで固着してブラシテープ11Tとして束ね、このブラシテープ11Tを、円柱状の回転部材11Hの下方先端に巻回固着して形成している。このブラシテープ11Tが回転部材11Hの周面に段付き固定されることで周囲に膨出する。このためブラシテープ11Tは、ブラシテープ11Tよりも上部にて回転部材11Hに挿通された、係止片15aたるワッシャーの抜け止め機能、或いは、同じく回転部材11Hに挿通された、被係止片15bを有する飛散防止カバーの抜け止め機能を果たす(図3)。
【0044】
(回転軸L)
回転軸Lは、軸下方側が、側面視にて1度ないし10度、好ましくは2度〜5度の範囲の微小な傾斜角度θだけ鉛直方向に対して前方に傾いている。なお正面視にて鉛直方向である。これにより、水平面の液面の法線に対して(すなわち鉛直方向に対して)微小な傾斜角度θだけ回転ブラシが傾いて接触することとなる。具体的に言えば、接触端子11の低い側は、飛散防止カバー14と載置板21の接触面を周回する一方、高い側は、悲惨防止カバーの内壁に沿って周回する。これによって接触端子11の先端は、回転軸Lの平面視投射軸を長軸とする楕円軌道を描く。具体的には例えば、内径15mmの円上に接触端子11を配置し、回転軸Lの傾斜を鉛直方向に対して3度だけとしたとき、接触端子11の先端は、長径15.02mm、短径15mmの楕円軌道を描く。これにより、ブラシ上昇時には検体Oを掻き上げ、下降時すなわち検体Oの液中に戻るときに検体Oを剪断することとなり、また検体Oの攪拌を効率的に行うものとなる。
【0045】
(昇降機構12)
昇降機構12は、前記回転部材11Hを、検体Oの上方に離れた上端位置ないし検体Oのに接触端子が接触する下端位置の間、すなわち上下端位置間で昇降させる。具体的には、気泡位置P1に垂直方向に設置された昇降ポール12Pと、昇降ポール12Pに挿通されてこれに沿って上下に昇降運転するように制御される箱型の昇降ユニット12Yとを具備してなる(図1、2)。そしてこの昇降ユニット12Yには、箱型の正面前方から下方に向かって回転機構13が連結機構16によって着脱可能に固定され、箱型の底面から下方に向かってカバー押さえ板7が押さえ板固定アーム17Hによって固定され、そして箱型の閉蓋位置に近い側(実施例では正面視右側)の一側面から下方に向かって蓋保持アーム23Hが固定される(図1、2)。これら回転機構13、カバー押さえ板7、及び蓋保持アーム23Hは、昇降ユニット12Yと共に昇降する(図5ないし図7)。
【0046】
これによって、接触端子11を検体Oと離接させ、離間状態S1ないし接触状態S2とする。また、カバー押さえ板7を接地した飛散防止カバー14と離接させ、離間状態S1ないし接触状態S2とする。また、蓋保持アーム23Hの傾斜板23Ht上に保持した透視蓋22を板保持具25H上の載置板21と離接させ、離間状態S1ないし接触状態S2とし、さらに斜接触状態S5から対向接触状態S6とする。
【0047】
この昇降機構12によって、回転部材11Hが起泡可能な状態である接触状態S2にセットされる。この起泡可能な状態たる接触状態S2においては、接触端子11たる複数の接触端子11の少なくとも一部(実施例では全数の先端)が検体Oと接触する。
【0048】
好ましい回転位置たる回転部材11Hの下端位置(ブラシのセット高さ)は、静止状態において複数本ある接触端子11の全ての先端部が、載置板21たるガラスの表面と接触する高さである。たとえば載置板21の側方に配したセンサによって位置決めを行う。このセンサは、載置板21上面と接触端子11の空隙の有無を側面からの視認光によって判断する非接触視認センサであってもよく、接触端子11と載置板21の接触による圧力を検知する圧力センサであってもよい。このほか、接触端子11と載置板21を導電体からなるものとしておき、接触端子11と載置板21の接触による導電量を検知する導電センサなど、種々のセンサを使用することができる。
【0049】
液量130μlの場合、回転部材11Hの下端位置(ブラシのセット高さ)は、プラスマイナス1mm以内の誤差であることが好ましい。
【0050】
(回転機構13)
回転機構13は、接触端子11が検体Oと接触した前記接触状態S2において、回転部材11Hを回転軸L周りに回転させる機構である。具体的には回転モーター13Lと回転部材11Hとが、回転軸Lで同軸上に固定される。より具体的には、図3、4に示すように、モーター軸の先端と回転部材11Hの上方先端(基端)とが嵌合構造および嵌合構造内当接部での磁着によって取り外し可能に固定される。回転モーター軸13Lの下方先端には、連結磁性体16Mとして、角柱又は円柱状の磁石が固定される。また、回転部材11Hの上方基端には、角筒又は円筒状の連結穴16Hを同軸上に設けて、この連結穴16H内に連結磁性体16Mが嵌入するようにしており、これと共に、連結穴16Hの穴底に、磁着体からなる金属板を埋設している。この金属板は、実施例では円柱状の連結機構16と回転部材11Hとを連結する連結ビス16Sの皿状の頭部からなる。この連結ビス16Sの皿状の頭部が連結磁性体16Mの先端面と当接し、磁着して着脱可能に同軸固定される(図3、4)。
【0051】
この連結ビス16Sが、細棒状の回転部材11Hの上方基端面から螺入する際、回転部材11Hには予め、飛散防止カバー14の係止片15aたる孔空き板と、被係止片15bたるワッシャーとが通してある。そして図3に示すように、被係止片15bたるワッシャーが、回転部材11Hの下端側で膨出したブラシテープ11Tの段付き部上に係止し、そして係止片15aたる孔空き板が、被係止片15bたるワッシャーと、下方傾斜側面にて当接して係止する(図3)。
【0052】
(飛散防止カバー14)
飛散防止カバー14は、接触状態S2において、下端位置にある回転部材11H及び検体Oの周囲を環囲するように載置されることで、起泡時の検体Oの飛散を防止するものである。
【0053】
具体的には例えば、回転部材11H及び検体Oを囲いうる大きさの円筒体の上端に天井板を設けた、倒立容器状のカバーからなる。円筒体は特に起泡状態の様子を確認すべく、例えば内径15mmの光透過性部材(すなわち透明部材)が使用される。飛散防止カバー14は、昇降機構12によって起泡時に載置板21に接触して下面すべてが当接した位置まで降りる(図6、図7)。飛散防止カバー14が前記位置まで降りた接触状態S2において、カバー下縁辺が載置板21と密着した状態で、回転部材11Hが回転する(図7)。
【0054】
(係止機構15)
係止機構15は、接触端子11が検体Oと離間した離間状態S1において、飛散防止カバー14及び接触端子11を係止させる。具体的には係止機構15は、接触端子11が検体Oと接触した接触状態S2において係止解除状態S3となる(図7)と共に、接触端子11が検体Oと離間した離間状態S2において、飛散防止カバー14を回転部材11Hに係止させた係止状態S4となる。すなわち下端位置から上端位置へ向かうときに係止機構15が係止状態S4となり、飛散防止カバー14が吊り上げられる(図5)。また、飛散防止カバー14が接地する位置(図6)から下端位置(図7)までの下端位置付近にて、係止解除状態S3となる。
【0055】
実施例において、係止機構15は、筒状の飛散防止カバーの筒軸側に突出した係止片15aと、回転部材11Hの回転軸から周囲へ張り出した被係止片15bとからなる。
【0056】
係止片15aは例えば、円筒体の飛散防止カバー14の一端を蓋状に覆った円板に同心孔を形成した孔空き円板からなるものとすることができる。被係止片15bは例えば、回転部材11Hに挿通したワッシャーからなるものとすることができる(図4)。
【0057】
このように、筒状の飛散防止カバー14が回転部材11Hの周囲を囲うように係止することで、起泡後の回転部材Hの取り外し時、或いは閉蓋工程中の昇降ユニット12Yの昇降時において、検体Oが飛散したり手指等に付着することがない。使用後、検体の付着した回転部材11Hや飛散防止カバー14は廃棄する必要があるところ、検体Oの飛散や付着を防止することで、この廃棄作業を、不要な感染を防止しつつ衛生的に行うことができる。
【0058】
ここで係止片と係止片それぞれの係止面(孔空き円板の同心孔およびワッシャーの各周端面)をそれぞれ傾斜面とし、互いに対応するテーパー状に形成すれば、吊り上げたときに飛散防止カバー14の回転部材11Hへの芯合わせを自動的に行うことができ、飛散防止カバー14のセット位置を適正なものに保つ。飛散防止カバー14のセット位置を適正なものに保つことで、回転中の回転部材11Hと飛散防止カバー14との接触を確実に防止しうる。
【0059】
なお回転部材11Hの回転時には回転軸Lがぶれるため、飛散防止カバー14のセット位置がずれると回転中の回転部材11Hと飛散防止カバーとが接触しやすい。この接触によって、機械的起泡作業による正確な起泡度の測定が妨げられたり、飛散防止カバー14が浮き上がり機能しなくなったりする。
【0060】
(カバー押さえ板17)
実施例1のカバー押さえ板17は、先端が弾性部材たる板バネ部となった下部折曲弾性板からなり、図2、図5等に示すように、この板バネ部が下方傾斜した状態で、押さえ板固定アーム17Hを介して昇降ユニット12Yに固定される。この板バネ部は、昇降ユニット12Yが上端位置にあるとき、飛散防止カバー14の上方へ離間した状態となっている(図5)。
【0061】
また昇降ユニット12Yが上端位置から下端位置へ下降動作するとき、昇降ユニット12Yに固定された押さえ板固定アーム17H及びカバー押さえ板17が昇降ユニット12Yと共に降下する。飛散防止カバー14が接地した後も下降動作が続くことで、飛散防止カバー14の回転部材11Hに対する相対位置が上方へずれる。これにより、カバー押さえ板17は、飛散防止カバーの上面と接触した接触状態となる(例えば、図6ないし図7の状態)。この接触状態において、板バネ部は上方から飛散防止カバー14を弾性付勢し、飛散防止カバーの位置が変わらないように強固に位置固定する。
【0062】
実施例2のカバー押さえ板17は、図16に示すような中央孔及び先端切欠きを有した平板からなる。この平板は弾性板であり、中央孔に昇降機構12の昇降ポール12Pが貫通し、この中央孔よりも先端寄りの上面部が、昇降可能な押さえ板固定アーム17Hによって相対角度自在にヒンジ固定されると共に、基端辺が固定部にヒンジ固定される(図17参照)。
【0063】
実施例2の昇降ユニット12Yの昇降に伴い、昇降ユニット12Yに固定された押さえ板固定アーム17Hが昇降する。実施例2のカバー押さえ板17は、基端辺が固定部に、先端寄り上面部が押さえ板固定アーム17Hにそれぞれヒンジ固定されている。このため、押さえ板固定アーム17Hの昇降に伴い、カバー押さえ板17の基端辺が固定部に固定されたまま、カバー押さえ板17の先端辺が昇降する(図17ないし図19)。
【0064】
実施例2のカバー押さえ板17の先端辺付近は、中央に切欠きを有することで、実施例1と同様、板バネ部となっている。この板バネ部は、昇降ユニット12Yが上端位置にあるとき、飛散防止カバー14の上方へ離間した状態となっている(図17、18)。また昇降ユニット12Yが上端位置から下端位置へ下降動作するとき、昇降ユニット12Yに固定された押さえ板固定アーム17Hが昇降ユニット12Yと共に降下し、押さえ板固定アーム17Hに先端寄り位置でヒンジ固定されたカバー押さえ板17が、基端を支点として下方へ回転し、下方へ傾斜した状態となる。飛散防止カバー14が接地した後も下降動作が続くことで、飛散防止カバー14の回転部材11Hに対する相対位置が上方へずれる(図18)。こののち、カバー押さえ板17は、飛散防止カバーの上面と接触した接触状態となる(図19)。このカバー押さえ板17の飛散防止カバー14への接触状態において、板バネ部は上方から飛散防止カバー14を弾性付勢し、飛散防止カバーの位置が変わらないように強固に位置固定する。
〔載置運搬手段2〕
【0065】
(載置板21)
載置板21は、検体Oをその上に載置する板であり、例えばガラス板が使用される。検体Oが載置された載置板21は、起泡手段1によって起泡位置P1で検体Oが起泡された後、搬送手段25によって泡認識位置P2へ搬送され、透視蓋22たる透視蓋22たるスライドグラスを重ねた状態で泡認識手段3によって泡認識される。
【0066】
(スペーサー24)
載置板21の上面には、検体Oを載置する載置箇所を覆うようにして所定厚さのスペーサー24が配設される。スペーサー24は、後述する透視蓋22が載置板21を覆ったときに、透視蓋22が起泡された検体Oと接触して外方に拡がったり溢れ出たりするのを防ぐべく、載置板21の上面側に所定高さのスペースを確保するものである(図12、13)。実施例のスペーサー24として、所定厚さとして厚さ0.2mmのプラスチックテープを、載置板21の検体O載置箇所を囲う平面視四方枠状に貼付している(図15)。
【0067】
スペーサー24による、載置された検体Oの厚さを確保するための所定厚さは0.1mmないし0.5mm程度であることが好ましい。これは、透視蓋22たるスライドグラスを被せたときに検体Oが起泡されたまま平面方向に広がり、載置板21上に液層が確保されることで、泡認識のための視野範囲を広く確保できる厚さである。また、液層が厚すぎて透光量が減り、泡認識が困難になってしまうことのない厚さである。
【0068】
(閉蓋機構23)
閉蓋機構23は、透視蓋22を、検体Oの液面に斜接触状態S5で接触させてこの斜接触状態S5から傾斜角度を徐々に小さくする対向接触状態S6とするものである。これは、蓋保持アーム23Hが、先端に平行に設けた一対の傾斜板23Ht上に透視蓋22を載置保持したまま、下方の載置板21へ向かって下降して閉蓋することによって達成される(図9ないし図11)。
【0069】
斜接触状態S5から接触することで、検体Oの上部を閉蓋するときに透視蓋22と検体Oの間の空気を逃がすことができる(図10)。
【0070】
なお斜接触状態S5とは、検体Oの液面に対して傾斜させたまま接触する状態であり、対向接触状態S6とは、検体Oの液面に対して平行に対向接触する状態である。
【0071】
(蓋保持アーム23H)
蓋保持アーム23Hは具体的には、図8に示すように、透視蓋22の両端付近を、微小に傾斜した一対の傾斜板23Htで保持し、透視蓋22の両端辺の外側を各立設板23Heで囲うものとしている。また蓋保持アーム23Hは昇降機構12の昇降ユニット12Yに連結固定され、昇降機構12の昇降動作と共に昇降することで透視蓋22を載置板24上に載置するものとしている。
【0072】
(透視蓋22)
透視蓋22は、透光性泡認識手段3の撮像光が透過しうるだけの透光性を有する。撮像手段31による撮像焦点を透視蓋22の表面に定めることで、ピントのずれを無くし、撮像を鮮明化するものである。この透視蓋22は、検体O及び撮像手段31との間に介設され、泡認識手段3の撮像光を透過させる。
【0073】
実施例では、泡認識手段3による泡認識時に、載置板21の上方に、透視蓋22として比較的厚さに富んだスライドグラスを被せるものとしている(図13)。これは、顕微鏡等の撮像手段31による検視の際に、焦点位置としての平面を得るためのものである。すなわち、透視蓋22として薄い蓋板を使用すると、板面に微小なひずみが生じ、透視蓋22の面を基準位置としてオフセットした場合、泡認識において誤差が生じる場合がある。これに対して板面が平面に保たれ、不要なたわみの生じない十分な厚さの板体(例えば、スライドグラス)を使用すれば、透視蓋22の上面或いは下面を泡認識の基準位置としたときに、基準位置から所定距離だけ先の位置を認識する場合に、誤差の生じ難い均一的な認識位置となる。
【0074】
透視蓋22は、像拡大機能として、透視蓋22の上方から透視蓋22を介して透視蓋22下にある検体Oをみたとき、可視像たる検体Oの液面像を拡大する機能を備えたものであってもよい。また、整光機能として、平行に走る多数の突条やスリットによる一方向又は二方向フィルターによって、透視蓋22下方から透視蓋22を介して上方へ透過する光の方向を整える機能を備えたものでもよい(いずれも図示せず)。
【0075】
(搬送手段25)
搬送手段25は、少なくとも起泡位置P1及び泡認識位置P2の相互間で、検体Oを載置した載置板21を搬送する。
【0076】
気泡位置P1は、少なくとも起泡手段1による気泡を行う位置であり、図2の正面視左側である。この気泡位置P1に取り出し口41を設けており、気泡手段1のメンテナンスや以上動作時の対応を容易にしている。泡認識位置P2は、泡認識手段3による泡認識を行う位置であり、図2の正面視左側である。容積の嵩張る泡認識手段3の収容スペースを確保し、気泡位置P1とずれた静止位置で泡認識することで高い泡認識精度を確保している。
【0077】
実施例の搬送手段25は、ステッピングモーターによって正面視左右方向へ走る搬送レール25Rと、この搬送レール25R上を移動可能な載置板保持具25Hと、ステッピングモーターによって搬送レール25Rの正面視一端及び多端の間を移動させる搬送駆動機構25Mとを具備する。前記搬送レール25Rの正面視左端が起泡位置P1であり、正面視右端が泡認識位置P2である(図2)。搬送駆動機構25Mは、起泡位置P1を原点としてそこから正面視左側への移動量をパルス数で制御する。
〔認識手段〕
【0078】
(泡認識手段3)
泡認識手段3は、検体Oの複数の深度断面(例えば図14のA、B、Cで示すような、スペーサー24を厚さ方向に等分した各断面)において泡数を認識し、各断面の認識泡数を平均することで、起泡させた検体Oに含まれる泡の数、動向、大きさを識別する。図14で示すような複数の断面で視認することで、泡状にならない不純物の誤認識の割合を防ぎ、マイクロバブルの含有率をより精度よく把握することができる。
【0079】
具体的には泡認識手段3は、検体Oの液面上方から見た撮像を認識する撮像手段31と、検体O及び撮像手段31との間に介設される透視蓋22と、撮像手段31によって認識された撮像に含まれる所定範囲の径の泡の数を解析する解析部32とを備えてなる。また、この泡認識手段3は、拡大レンズ(顕微鏡)を備えてなることが好ましい。
【0080】
(撮像手段31)
撮像手段31は、検体Oの液面上方から見た撮像を認識する手段である。具体的には、CCDカメラ、顕微鏡、ルーペレンズ、反射鏡等の拡大鏡を含む、肉眼可視像の光学式撮像手段と、感熱センサ、音波センサ、赤外線センサを含む、肉眼不可視像或いは非光学式の撮像手段との両方が含まれる。
【0081】
(解析部32)
解析部32は、撮像手段31によって認識された撮像に含まれる所定範囲の径の泡の数を画像解析する。解析された画像、及び解析結果たる泡の大きさ毎の分布は、表示手段33によって、図6に示すような所定の表示画面にて患者名、患者ID及び診断医名と共に表示される。
〔その他〕
【0082】
(ケーシング4)
ケーシング4は、起泡手段1、飛散防止カバー14、載置板21、泡認識手段3、撮像手段31、搬送手段25といった各構成部品を覆う。ケーシング4には、検体Oを収納及び取り出す取り出し口41が、気泡位置P1及び閉蓋位置を含む大きさで備えられる。
【0083】
その他各部の具体的な構成は、上述した実施例に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【0084】
(マイクロバブルテスト方法)
検体Oは、下記の工程を経たマイクロバブルテスト方法によって起泡及び泡数検出され、マイクロバブルテストが達成される。このマイクロバブルテスト方法は任意の機器或いは手作業によって行うことができるが、例えば、上記本発明のマイクロバブルテスターのような、機械的気泡手段を含むマイクロバブルテスターを用いて行うことが好ましい。
【0085】
(1)先ず、載置板21たるカバーガラスを、装置の起泡位置P1或いは起泡位置P1へ機械誘導される適宜位置へセットした後、セットした載置板21上面のうち、スペーサー24で囲われた中央部へ、検体Oを滴下する(図12、図15参照)。検体Oの滴下は、装置内に配備した自動滴下手段によるものでもよく、或いはピペット等を用いた手動滴下によるものでもよい。また載置板21のセットと滴下の順は前記と逆でもよく、検体O滴下の完了した載置板21を、滴下状態のまま装置の起泡位置P1或いは起泡位置P1へ機械誘導される位置へセットするものとしても良い。セット及び検体O滴下後の状態を図1、図2及び図5に示す。
【0086】
(2)次に、載置板21の上方へ、円筒状の飛散防止カバー14を昇降機構12の降下運転によって、飛散防止カバー14が載置板21に対して接触状態S2となるよようにセットする(図6)。このとき、飛散防止カバー14の一部が接地して接触状態S2となった後も引き続き昇降機構12の降下運転を続けることで、回転部材11Hに対する飛散防止カバー14の相対位置が上方にずれる。これにより、係止機構15が係止状態S4から係止解除状態S3となると共に、カバー押さえ板17が飛散防止カバー14の上面を押さえて飛散防止カバー14を位置固定した状態となる。
【0087】
なお手動で飛散防止カバー14を載置板21たるガラス上に載置してセットするものでも良い。
【0088】
(3)続けて、昇降機構12をさらに降下運転させて、接触端子11の少なくともいずれかが検体Oと接触する接触状態S2となるまでセットする(図7)。
【0089】
(4)次に、回転機構13によって、接触端子11たる回転ブラシを検体Oと先端接触させたまま回転させ、検体Oを気泡する。この回転状態において、接触端子11の先端部は、その間隔が広がりながら検体Oの内外を高速で回転移動する。このようにして検体Oに多くのマイクロバブルが発生する。
【0090】
(5)起泡後、昇降機構12の上昇運転によって、載置板21上から飛散防止カバー14を上方へ取り除く。検体Oの付着した飛散防止カバー及び回転部材11Hは、回転モーター軸13Mと連結した連結機構16の磁着連結を解除することで一体的に撤去及び廃棄する。
【0091】
(6)次に搬送手段25によって、載置板21を、起泡手段1を行う起泡位置P1から、閉蓋動作を行う閉蓋位置へ搬送する。
【0092】
(7)次に昇降機構12によって、蓋保持アーム23Hで傾斜保持した透視蓋22を、載置板21と離間した離間状態S1から、載置板21上へ接触する接触状態S2とする。このとき、斜接触状態S5から順に対向接触状態S6とすることで載置板21と透視蓋22との間の空気が一方向に逃げて余分な空気を含まない状態で閉蓋される。このような閉蓋によって気泡状態が確保されたままとなる。
(8)次に搬送手段25によって、載置板21を、閉蓋動作を行う閉蓋位置から泡認識位置P2へ搬送する。載置板21が泡認識位置P2へ搬送されたとき、顕微鏡の下方に予め固設された透視蓋22たるスライドグラスの下方直下へ載置板21がセットされ、載置板21の検体O上に透視蓋22たるスライドグラスが乗せられた状態となる。
【0093】
(9)次に、撮像部たる顕微鏡でピント調整をし、起泡後の検体Oの画像を取得する。
【0094】
(10)次に、撮像部で取得した画像を、解析部32によって解析し、画像に含まれる所定範囲の径の泡の数を自動的にカウントし、カウント数および解析画像を表示手段(図示せず)によって表示部へ表示する。
【0095】
(11)次に、載置板21を、搬送駆動機構25Mによって取り出し口41まで搬送し、検体Oを取り出し可能な状態とする。この後、取り出し口41から起泡後の検体を取り出す。このとき検体は閉蓋されているため手指等に検体Oが付着し難いものとなっている。
【0096】
(泡の立て方について)
回転部材11Hたる回転ブラシはディスポーサブルで使用する。これらは回転モーター13Mの一つの構成として備えられた、回路を制御するマイコンで設定される。
【0097】
前記回転モーター13Mによる回転手段の回転開始とともに、ブラシ先端部が遠心力により広がり、検体Oを剪断および撹拌しながら起泡する。ここで、回転手段の回転軸Lを、鉛直方向に対して1度〜10度、好ましくは2度〜5度の角度で傾斜させて配置させていることで、検体Oを掻き上げる効果が得られ、起泡効率が上がる。
【0098】
なお本実施例では、起泡時にブラシを押しつける必要はなく、前述のブラシが広がった状態で検体Oに触れる程度の高さであれば起泡可能である。
【0099】
起泡後、透視蓋22たるスライドグラスを重ねる。泡を残した状態を保つ為、載置板21と透視蓋22たる透視蓋22たるスライドグラスとの間に0.2mmのスペーサー24を設けてある。これにより、泡をつぶすことなく顕微鏡下で平面視認画像が得られることとなる。
【図面の簡単な説明】
【0100】
【図1】本発明の実施例1のマイクロバブルテスターの離間状態における全体構成を示す側面図である。
【図2】実施例1のマイクロバブルテスターの離間状態における全体構成を示す正面図である。
【図3】実施例1の回転部材11H及び回転モーター軸11Mを示す概観図である。
【図4】図3に示す実施例1の回転部材11H及び回転モーター軸11Mの分解説明図である。
【図5】実施例1のマイクロバブルテスターの昇降機構の作動状況であって、離間状態かつ係止状態S4を示す側面視説明図である。
【図6】実施例1のマイクロバブルテスターの昇降機構の作動状況であって、離間状態かつ係止状態S4から係止解除状態に移る過程を示す側面視説明図である。
【図7】実施例1のマイクロバブルテスターの昇降機構の作動状況であって、接触状態かつ係止解除状態を示す側面視説明図である。
【図8】実施例1のマイクロバブルテスターの蓋保持アーム23Hを示す斜視説明図である。
【図9】実施例1のマイクロバブルテスターの閉蓋機構23の作動状況であって、閉蓋前の状態を示す斜視説明図である。
【図10】実施例1のマイクロバブルテスターの閉蓋機構23の作動状況であって、斜接触状態を示す側面視説明図である。
【図11】実施例1のマイクロバブルテスターの閉蓋機構23の作動状況であって、対向接触状態を示す側面視説明図である。
【図12】実施例1のマイクロバブルテスターの閉蓋前の状態における載置板21を示す側面視説明図である。
【図13】実施例1のマイクロバブルテスターの閉蓋後の対向接触状態における載置板21及び透視蓋23を示す側面視説明図である。
【図14】図13に示す閉蓋後の対向接触状態における検体の状態を示す側面視拡大説明図である。
【図15】実施例1のマイクロバブルテスターの対向接触状態における載置板21及び透視蓋23を示す平面視説明図である。
【図16】実施例2のマイクロバブルテスターのカバー押さえ板17及びその周辺構成を示す斜視説明図である。
【図17】実施例2のマイクロバブルテスターの昇降機構の作動状況であって、離間状態かつ係止状態S4を示す側面視説明図である。
【図18】実施例2のマイクロバブルテスターの昇降機構の作動状況であって、離間状態かつ係止状態S4から係止解除状態に移る過程を示す側面視説明図である。
【図19】実施例2のマイクロバブルテスターの昇降機構の作動状況であって、接触状態かつ係止解除状態を示す側面視説明図である。
【符号の説明】
【0101】
1 起泡手段
11 接触端子(ブラシ毛)
11H 回転部材
11T ブラシテープ
12 昇降機構
12P 昇降ポール
12Y 昇降ユニット
13 回転機構
13L 回転モーター軸
14 飛散防止カバー
15 係止機構
15a 係止片(孔開き板)
15b 被係止片(ワッシャー)
16 連結機構
16M 連結磁性体
16H 連結穴
16S 連結ビス
17 カバー押さえ板
17H 押さえ板固定アーム
2 載置運搬手段
21 載置板
22 透視蓋(スライドグラス)
23 閉蓋機構
23H 蓋保持アーム
23Ht 傾斜板
23 閉蓋機構
24 スペーサー(プラスチックテープ)
25 搬送手段
25R 搬送レール
25H 板保持具
25M 搬送駆動機構
3 泡認識手段
31 撮像手段
32 解析部
4 ケーシング
41 取り出し口
L 回転軸
θ 傾斜角度
O 検体
P1 起泡位置
P2 泡認識位置
S1 離間状態
S2 接触状態
S3 係止解除状態
S4 係止状態S4
S5 斜接触状態
S6 対向接触状態
【特許請求の範囲】
【請求項1】
生体液を主成分とした検体Oを起泡して検体Oのマイクロバブルの発生状況を検知するマイクロバブルテスターであって、検体Oへの接触端子11を検体Oに接触させたまま回転させることで検体Oを起泡させる起泡手段1と、起泡させた検体Oを透視蓋22で閉蓋する閉蓋機構23と、透視蓋22を外側から検視して、起泡された検体Oに含まれる泡の数を認識する泡認識手段3とを具備することを特徴とするマイクロバブルテスター。
【請求項2】
閉蓋機構23が、透視蓋22を、検体Oの液面に対して斜めに接触する斜接触状態S5で接触させ、この斜接触状態S5から、検体Oの液面に対して平行に対向接触する対向接触状態S6とする請求項1記載のマイクロバブルテスター。
【請求項3】
起泡手段1が、接触端子11を下方先端に設けた回転部材11Hと、
この回転部材11Hを昇降させることで、接触端子11を、検体Oと離接させた離間状態S1ないし接触状態S2とする昇降機構12と、
前記接触状態S2において回転部材11Hを回転させる回転機構13と、
前記接触状態S2において検体Oの周囲を囲うことで検体Oの飛散を防止する飛散防止カバー14と、
前記離間状態S1において飛散防止カバー14を回転部材11Hに係止させる係止機構15とを備えてなり、
前記離間状態S1において、係止機構15が係止状態S4となって、飛散防止カバー14が昇降する回転部材11Hに吊り上げられ、
前記接触状態S2において、係止機構15が係止解除状態S3となって、飛散防止カバー14が検体O及び接触端子11を環囲する位置へ載置され、
この接触状態S2において、回転部材11Hが回転機構13によって回転して検体Oを起泡し、載置された飛散防止カバー14が検体Oの飛散を防止する請求項1または2記載のマイクロバブルテスター。
【請求項4】
係止機構15が、飛散防止カバー14の内側へ均一形状で突出した係止片15aと、回転部材11Hの周囲へ軸対称に張り出した被係止片15bとからなり、回転部材11Hの昇降によって係止片15aが被係止片15bに係止し、飛散防止カバー14が回転部材11Hの周囲均等位置にて係止状態S4となると共に、回転部材11Hの下降によって前記周囲均等位置のまま係止解除状態S3に移行する請求項3記載のマイクロバブルテスター。
【請求項5】
回転部材11Hが、回転モーター軸13Lの先端に磁着して取り外し可能に固定され、前記回転モーター軸13Lに固定された状態で回転モーター軸13Lと同軸回転する請求項3または4記載のマイクロバブルテスター。
【請求項6】
回転部材11Hが、回転軸L周りに回転するものであり、この回転軸Lは鉛直方向に対して所定の傾斜角度θで傾斜してなる請求項3、4または5のいずれか記載のマイクロバブルテスター。
【請求項7】
泡認識手段3が、検体Oの複数の深度断面において泡数を認識する請求項1、2、3、4、5または6のいずれか記載のマイクロバブルテスター。
【請求項1】
生体液を主成分とした検体Oを起泡して検体Oのマイクロバブルの発生状況を検知するマイクロバブルテスターであって、検体Oへの接触端子11を検体Oに接触させたまま回転させることで検体Oを起泡させる起泡手段1と、起泡させた検体Oを透視蓋22で閉蓋する閉蓋機構23と、透視蓋22を外側から検視して、起泡された検体Oに含まれる泡の数を認識する泡認識手段3とを具備することを特徴とするマイクロバブルテスター。
【請求項2】
閉蓋機構23が、透視蓋22を、検体Oの液面に対して斜めに接触する斜接触状態S5で接触させ、この斜接触状態S5から、検体Oの液面に対して平行に対向接触する対向接触状態S6とする請求項1記載のマイクロバブルテスター。
【請求項3】
起泡手段1が、接触端子11を下方先端に設けた回転部材11Hと、
この回転部材11Hを昇降させることで、接触端子11を、検体Oと離接させた離間状態S1ないし接触状態S2とする昇降機構12と、
前記接触状態S2において回転部材11Hを回転させる回転機構13と、
前記接触状態S2において検体Oの周囲を囲うことで検体Oの飛散を防止する飛散防止カバー14と、
前記離間状態S1において飛散防止カバー14を回転部材11Hに係止させる係止機構15とを備えてなり、
前記離間状態S1において、係止機構15が係止状態S4となって、飛散防止カバー14が昇降する回転部材11Hに吊り上げられ、
前記接触状態S2において、係止機構15が係止解除状態S3となって、飛散防止カバー14が検体O及び接触端子11を環囲する位置へ載置され、
この接触状態S2において、回転部材11Hが回転機構13によって回転して検体Oを起泡し、載置された飛散防止カバー14が検体Oの飛散を防止する請求項1または2記載のマイクロバブルテスター。
【請求項4】
係止機構15が、飛散防止カバー14の内側へ均一形状で突出した係止片15aと、回転部材11Hの周囲へ軸対称に張り出した被係止片15bとからなり、回転部材11Hの昇降によって係止片15aが被係止片15bに係止し、飛散防止カバー14が回転部材11Hの周囲均等位置にて係止状態S4となると共に、回転部材11Hの下降によって前記周囲均等位置のまま係止解除状態S3に移行する請求項3記載のマイクロバブルテスター。
【請求項5】
回転部材11Hが、回転モーター軸13Lの先端に磁着して取り外し可能に固定され、前記回転モーター軸13Lに固定された状態で回転モーター軸13Lと同軸回転する請求項3または4記載のマイクロバブルテスター。
【請求項6】
回転部材11Hが、回転軸L周りに回転するものであり、この回転軸Lは鉛直方向に対して所定の傾斜角度θで傾斜してなる請求項3、4または5のいずれか記載のマイクロバブルテスター。
【請求項7】
泡認識手段3が、検体Oの複数の深度断面において泡数を認識する請求項1、2、3、4、5または6のいずれか記載のマイクロバブルテスター。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2008−116403(P2008−116403A)
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願番号】特願2006−301916(P2006−301916)
【出願日】平成18年11月7日(2006.11.7)
【出願人】(598026758)東京マイクロデバイス株式会社 (3)
【Fターム(参考)】
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願日】平成18年11月7日(2006.11.7)
【出願人】(598026758)東京マイクロデバイス株式会社 (3)
【Fターム(参考)】
[ Back to top ]