
マイクロロボット
【課題】 本発明の目的はマイクロロボットなどに使用される自走機構より成る移動装置において、移動する床面状態が平面でなくとも、即ちうねり、歪曲等曲面であっても又、床面状態が平滑でなく表面粗さがあっても対応する移動装置を提供することにある。
【解決手段】 駆動された圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に配置され弾力的に接続されたことを特徴とする移動装置。
【解決手段】 駆動された圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に配置され弾力的に接続されたことを特徴とする移動装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マイクロロボットなどに使用される自走機構より成る移動装置に関するものである。
【背景技術】
【0002】
通常のマイクロロボットは各種作業を行ったり測定を行う作業機構を搭載した移動装置より成り、例えば走査型、透過型顕微鏡内にての作業を行うなど高度な動作を必要とする作業機構にはより精密な移動装置が必要であるが、製造及び維持コストも高く、超精密な作業を必要としない通常の微少作業には、コスト的にも、より簡便なマイクロロボットが必要とされる。
【0003】
より簡便なマイクロロボットが、例えば、特許文献1において、小型自走式精密作業ロボットと共振式マイクロホッピング工具の微細加工方法の名称で提案されている。特許文献1で提案されたマイクロボットは、移動機構を備えた超小型自走式精密作業ロボットであり、圧電素子と電磁石とを間欠的に駆動して尺取虫状態にて加工面上を移動する。このため、鉄等の磁性体加工面上を垂直面や天井面であってもガイドレール等なしに精密に進行することができる。
【0004】
しかしながら、特許文献1は、マイクロロボットの具体的な構造、特に、尺取虫動作を可能にする構造について明記していない。更に、マイクロロボットが曲面上を走行する場合における対策について、明らかにしていない。
【特許文献1】特開平11−10475
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の目的はマイクロロボットなどに使用される自走機構より成る移動装置において、移動する床面状態が平面でなくとも、即ちうねり、歪曲等曲面であっても又、床面状態が平滑でなく表面粗さがあっても対応する移動装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明移動装置は、2本の後脚スタンドが通電励磁された後脚電磁石により磁性床面に密着した状態において通電遮断された前脚電磁石に影響されない2本の前脚が圧電素子の伸長作用により前進し、次いで2本の前脚スタンドは通電励磁された前脚電磁石により床面に密着され、通電遮断された後脚電磁石に影響されない2本の後脚スタンドは圧電素子の収縮作用により前進方向に引き寄せられるといった1サイクルにより移動装置全体が前進する。
【0007】
上記前進動作以外に、左に方向転換する場合は左側前脚スタンド側に位置する圧電素子の振幅を減少させ、右に方向転換する場合は右側前脚スタンド側に位置する圧電素子の振幅を減少させる。後進する場合は2個の電磁石の駆動信号の位相を反転させることにより可能となる。
【0008】
相互に固定された2本の前脚スタンドと同様に相互に固定された2本の後脚スタンドは通常の機構によれば4点支持のため自由曲面の床面には接触しない脚が生じ不安定となるので、前脚スタンド及び後脚スタンド間に自由度を持たせるよう前脚ホルダーと後脚ホルダーの間に中間回転機構を採用する。
【0009】
前脚スタンドと後脚スタンドの間に設ける自由度は、自走機械の移動方向の軸回りの回転自由度を与えれば、移動面の形状に沿って前脚後脚スタンドは追従する。これ以外の自由度があると圧電素子の変位がそこで吸収され脚に伝えられなくなり、精密な移動およびクランプ時の安定した姿勢の保持ができなくなる。
【0010】
ストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に弾力的に接続されている後脚ホルダーと中間ホルダーは、2枚のバネ性あるリーフスプリングのそれぞれの下方に2個の圧電素子を挟持する構成となっている。
バネ性あるリーフスプリングは後脚ホルダーと中間ホルダーを弾力的に繋いでおり、圧電素子の伸長、収縮を繰り返してもその復元力により伸長、収縮運動を確実に維持する。圧電素子を駆動することにより圧電素子が伸長し前脚ホルダーを介して前脚スタンドを前進方向に、或いは圧電素子が収縮し中間ホルダーと後脚ホルダーを介して後脚スタンドを引き寄せることによって移動装置全体が前進する。
【0011】
2個の圧電素子は個体差がありその伸長収縮の変位が完全には一致せず、伸長収縮の繰り返しの中で前脚スタンド及び/或いは後脚スタンドの運動軌跡に微少のズレが生じることがあるが、2枚のバネ性あるリーフスプリングがズレを修正復帰させる役割をも果たす。
【発明の効果】
【0012】
本発明は簡便簡易な構成であり、後脚電磁石による後脚スタンドの床面への密着、圧電素子伸長による2本の前脚スタンドの前進、次いで前脚電磁石による2本の前脚の床面への密着、圧電素子収縮による2本の後脚スタンドの引き寄せを1サイクルとする運動により前進移動、又前脚ホルダーと中間ホルダーの間に中間回転機構を採用するため2本の前脚及び2本の後脚が床面に常に密着し、例えば斜面或いは天井面でさえも密着可能であり、簡易で安価なマイクロロボット用移動装置を提供可能である。
【発明を実施するための最良の形態】
【0013】
本発明の特徴ある特色と利点は、添付図面に関して提供される以下の実施例の記述から更に明白となるであろう。
【0014】
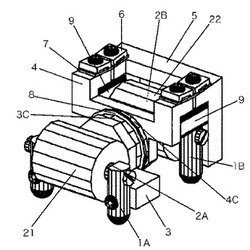
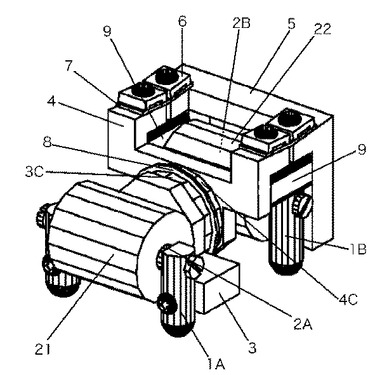
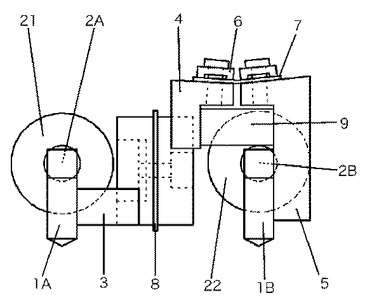
本発明の一形態である本実施例を図1、2、3、4および5にしたがって説明する。本実施例は、前脚ホルダー3、中間ホルダー4と後脚ホルダー5を主用構成要素としている。
【0015】
後脚ホルダー5には両側より前脚電磁石22を挟持する2本の後脚スタンド1Bが取り付けられ両端頂部には各2個のストッパー6により固定された2枚のバネ性あるリーフスプリング7が配置され、中間ホルダー4は一端が回転可能に前脚ホルダー3と接続し他端が後脚ホルダー5と対峙し後脚ホルダー5と同様両端頂部には各2個のストッパー6により固定された2枚のバネ性あるリーフスプリング7を該後脚ホルダー5と共に共有し、対峙する後脚ホルダー5と中間ホルダー4の両端間にて各1個の圧電素子9を挟持し、前脚ホルダー3は一端が回転可能に中間ホルダー4と接続し他端が両側より前脚電磁石21を挟持する2本の前脚スタンド1Bが取り付けられている。前脚電磁石21の中心には前脚電磁石コア2A、後脚電磁石22の中心には後脚電磁石コア2Bが配されている。中間ホルダー4の一端である中間ホルダー接続端4Cはワッシャー8を介して前脚ホルダー3の一端である前脚ホルダー接続端3Cと回転可能に接続されている。
【0016】
後脚ホルダー5と中間ホルダー4のそれぞれの頂部は、ストッパー6にて固定されたバネ性あるリーフスプリング7が橋渡し的に弾力的に繋がれており、圧電素子による伸長、収縮が繰り返されても後脚ホルダー5と中間ホルダー4は常に安定した相互位置関係が保持されている。
【0017】
後脚ホルダー5と中間ホルダー4のそれぞれの頂部下方に圧電素子9が挟持され、該圧電素子9の伸長収縮に伴って後脚ホルダー5と中間ホルダー4間の距離が変化する。バネ性あるリーフスプリング7を基点として圧電素子の伸長収縮は更に遠い地点に位置する前脚スタンド1A先端および後脚スタンド1B先端には、より増幅されてその変位が現れ、移動装置としての前進機能に更に貢献する。
【0018】
前述のとおり中間ホルダー接続端4Cと前脚ホルダー接続端3Cはワッシャー8を介して回転可能に接続されているので、2本の前脚スタンド1Aと2本の後脚スタンド1Bは中間ホルダー4を介して自由度を持つこととなり、例え床面が歪曲していたとしても移動装置直下の床面形状にしたがって2本の前脚スタンド1Aと2本の後脚スタンド1Bは床面に追従する。
【0019】
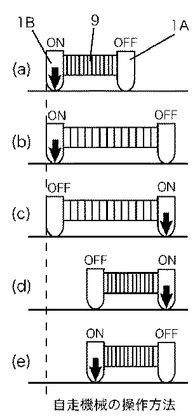
移動装置の動作推移について図5にしたがって説明する。
第一ステップ<状態(a)>:
後脚ホルダー5に挟持された後脚電磁石22が通電励磁(ON)され後脚電磁石コア2B、後脚スタンド1B、磁性床面に閉磁路が形成され、後脚スタンド1Bは床面に密着する。下方向き太線矢印は床面吸着を表わす。この時点において前脚ホルダー3に挟持された前脚電磁石21は通電遮断(OFF)されており前脚電磁石コア2A、前脚スタンド1A、磁性床面のループは開磁路であって前脚スタンド1Aは床面密着より解放されている。
第二ステップ<状態(b)>:
2個の圧電素子9を伸長方向に駆動することによって前脚ホルダー3は前進方向に移動し、前脚ホルダー3に取り付けられた前脚スタンド1Aは前進する。
第三ステップ<状態(c)>:
前脚ホルダー3に挟持された電磁石21が通電励磁(ON)され前脚電磁石コア2A、前脚スタンド1A、磁性床面に閉磁路が形成され前脚スタンド1Aは床面に密着する。同時に後脚電磁石22へは通電遮断(OFF)され後脚スタンド1Bは床面への密着より解放される。
第四ステップ<状態(d)>:
前脚スタンド1Aが床面に密着された状態で圧電素子9を収縮方向に駆動することによって中間ホルダー4を介して、後脚ホルダー3に取り付けられた後脚スタンド1Bは前進方向に引き寄せられる。この時点にてワンサイクルは終了し移動装置全体が前進した。
第五ステップ<状態(e)>:
前脚電磁石21へは通電遮断(OFF)され、後脚電磁石22が再度通電励磁(ON)され、第一ステップに戻る。
【0020】
以上の動作を繰り返すことによって所定距離を移動する。直進移動以外の移動については前述したとおりである。
【0021】
本発明による移動装置の動作推移について、電磁石への通電励磁、通電遮断、および圧電素子の駆動による伸長収縮運動について説明したが、電磁石の通電励磁、通電遮断と圧電素子駆動のタイミングについて説明する。一例として前脚電磁石21と後脚電磁石22は方形波で交互に励起し、併せて圧電素子を正弦波で駆動し伸長収縮させる。したがって前脚スタンド1Aと後脚スタンド1Bは階段状に移動する。圧電素子を正弦波で駆動する場合とは別に、正弦波のピーク部分を周期の10%区間カットした信号(ピークカット正弦波)で駆動することも可能である。前者の場合電磁石21および22のオン/オフが切り替わる瞬間に圧電素子が一瞬停止することとなるが、後者による駆動の場合電磁石21および22のオン/オフが切り替わるタイミングの前後一定時間(周期の10%)圧電素子が停止するため、それぞれの動作が確実に行われる。
【0022】
歪曲等自由曲面上を移動するために前脚スタンド1Aと後脚スタンド1Bの間、即ち前脚ホルダー3と後脚ホルダー5の間に中間ホルダー4を採用すると前述した。一般に普及しているジョイント回転機構はベアリング回転機構が主であるが、ベアリング回転機構は回転以外の”がた”が発生しやすく、超精密の移動が要求される場合移動が困難となる危険があるので本実施例においては、ベアリングのごとき点支持ではなくワッシャー等平面支持を採用した。平面支持の場合接触部分の面積が大きいため接触圧は小さくなるが、ベアリングによる転がり摩擦より摩擦力の大きい滑り摩擦となる。しかし接触表面の仕上げを万全にすることにより摩擦力を低減することが出来た。
【0023】
本実施例において電磁石21、22は珪素鋼を採用し、中間ホルダー接続端4Cと後脚ホルダー3C間のワッシャー材質にはりん青銅を採用した。中間ホルダー接続端4Cと後脚ホルダー接続端3Cの材質にはジュラルミンを採用した。ジュラルミンは材質として柔らかく塑性変形しやすく、ジュラルミン同士を接触し圧力を加えると互いに凝着し摩擦が大きくなるが、中間に塑性変形のしにくい硬材質のりん青銅を挟さむと摩擦力を減じさせ滑りが向上する。
【0024】
表面粗さと接触面の粗さにより摩擦係数が変化することは当然だが、材質により摩擦係数が最小となるポイントがある。ジュラルミンとりん青銅の表面を粒度3(μm)のラッピングペーパーにて仕上げた場合が最小の摩擦係数となることが判明した。
【図面の簡単な説明】
【0025】
【図1】本発明によって提案される移動装置の見取り図である。
【図2】移動装置の上面図である。
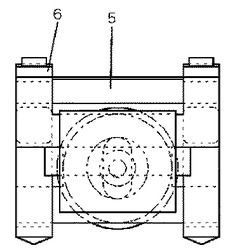
【図3】移動装置の正面図を示す。
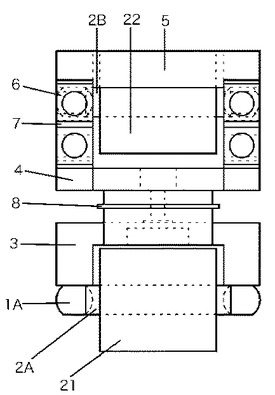
【図4】移動装置の側面図を示す。
【図5】移動装置の動作推移図である。
【符号の説明】
【0026】
1A 前脚スタンド
1B 後脚スタンド
21 前脚電磁石
22 後脚電磁石
2A 前脚電磁石コア
2B 後脚電磁石コア
3 前脚ホルダー
3C 前脚ホルダー接続端
4 中間ホルダー
4C 中間ホルダー接続端
5 後脚ホルダー
6 ストッパー
7 リーフスプリング
8 ワッシャー
9 圧電素子
【技術分野】
【0001】
本発明は、マイクロロボットなどに使用される自走機構より成る移動装置に関するものである。
【背景技術】
【0002】
通常のマイクロロボットは各種作業を行ったり測定を行う作業機構を搭載した移動装置より成り、例えば走査型、透過型顕微鏡内にての作業を行うなど高度な動作を必要とする作業機構にはより精密な移動装置が必要であるが、製造及び維持コストも高く、超精密な作業を必要としない通常の微少作業には、コスト的にも、より簡便なマイクロロボットが必要とされる。
【0003】
より簡便なマイクロロボットが、例えば、特許文献1において、小型自走式精密作業ロボットと共振式マイクロホッピング工具の微細加工方法の名称で提案されている。特許文献1で提案されたマイクロボットは、移動機構を備えた超小型自走式精密作業ロボットであり、圧電素子と電磁石とを間欠的に駆動して尺取虫状態にて加工面上を移動する。このため、鉄等の磁性体加工面上を垂直面や天井面であってもガイドレール等なしに精密に進行することができる。
【0004】
しかしながら、特許文献1は、マイクロロボットの具体的な構造、特に、尺取虫動作を可能にする構造について明記していない。更に、マイクロロボットが曲面上を走行する場合における対策について、明らかにしていない。
【特許文献1】特開平11−10475
【発明の開示】
【発明が解決しようとする課題】
【0005】
本発明の目的はマイクロロボットなどに使用される自走機構より成る移動装置において、移動する床面状態が平面でなくとも、即ちうねり、歪曲等曲面であっても又、床面状態が平滑でなく表面粗さがあっても対応する移動装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明移動装置は、2本の後脚スタンドが通電励磁された後脚電磁石により磁性床面に密着した状態において通電遮断された前脚電磁石に影響されない2本の前脚が圧電素子の伸長作用により前進し、次いで2本の前脚スタンドは通電励磁された前脚電磁石により床面に密着され、通電遮断された後脚電磁石に影響されない2本の後脚スタンドは圧電素子の収縮作用により前進方向に引き寄せられるといった1サイクルにより移動装置全体が前進する。
【0007】
上記前進動作以外に、左に方向転換する場合は左側前脚スタンド側に位置する圧電素子の振幅を減少させ、右に方向転換する場合は右側前脚スタンド側に位置する圧電素子の振幅を減少させる。後進する場合は2個の電磁石の駆動信号の位相を反転させることにより可能となる。
【0008】
相互に固定された2本の前脚スタンドと同様に相互に固定された2本の後脚スタンドは通常の機構によれば4点支持のため自由曲面の床面には接触しない脚が生じ不安定となるので、前脚スタンド及び後脚スタンド間に自由度を持たせるよう前脚ホルダーと後脚ホルダーの間に中間回転機構を採用する。
【0009】
前脚スタンドと後脚スタンドの間に設ける自由度は、自走機械の移動方向の軸回りの回転自由度を与えれば、移動面の形状に沿って前脚後脚スタンドは追従する。これ以外の自由度があると圧電素子の変位がそこで吸収され脚に伝えられなくなり、精密な移動およびクランプ時の安定した姿勢の保持ができなくなる。
【0010】
ストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に弾力的に接続されている後脚ホルダーと中間ホルダーは、2枚のバネ性あるリーフスプリングのそれぞれの下方に2個の圧電素子を挟持する構成となっている。
バネ性あるリーフスプリングは後脚ホルダーと中間ホルダーを弾力的に繋いでおり、圧電素子の伸長、収縮を繰り返してもその復元力により伸長、収縮運動を確実に維持する。圧電素子を駆動することにより圧電素子が伸長し前脚ホルダーを介して前脚スタンドを前進方向に、或いは圧電素子が収縮し中間ホルダーと後脚ホルダーを介して後脚スタンドを引き寄せることによって移動装置全体が前進する。
【0011】
2個の圧電素子は個体差がありその伸長収縮の変位が完全には一致せず、伸長収縮の繰り返しの中で前脚スタンド及び/或いは後脚スタンドの運動軌跡に微少のズレが生じることがあるが、2枚のバネ性あるリーフスプリングがズレを修正復帰させる役割をも果たす。
【発明の効果】
【0012】
本発明は簡便簡易な構成であり、後脚電磁石による後脚スタンドの床面への密着、圧電素子伸長による2本の前脚スタンドの前進、次いで前脚電磁石による2本の前脚の床面への密着、圧電素子収縮による2本の後脚スタンドの引き寄せを1サイクルとする運動により前進移動、又前脚ホルダーと中間ホルダーの間に中間回転機構を採用するため2本の前脚及び2本の後脚が床面に常に密着し、例えば斜面或いは天井面でさえも密着可能であり、簡易で安価なマイクロロボット用移動装置を提供可能である。
【発明を実施するための最良の形態】
【0013】
本発明の特徴ある特色と利点は、添付図面に関して提供される以下の実施例の記述から更に明白となるであろう。
【0014】
本発明の一形態である本実施例を図1、2、3、4および5にしたがって説明する。本実施例は、前脚ホルダー3、中間ホルダー4と後脚ホルダー5を主用構成要素としている。
【0015】
後脚ホルダー5には両側より前脚電磁石22を挟持する2本の後脚スタンド1Bが取り付けられ両端頂部には各2個のストッパー6により固定された2枚のバネ性あるリーフスプリング7が配置され、中間ホルダー4は一端が回転可能に前脚ホルダー3と接続し他端が後脚ホルダー5と対峙し後脚ホルダー5と同様両端頂部には各2個のストッパー6により固定された2枚のバネ性あるリーフスプリング7を該後脚ホルダー5と共に共有し、対峙する後脚ホルダー5と中間ホルダー4の両端間にて各1個の圧電素子9を挟持し、前脚ホルダー3は一端が回転可能に中間ホルダー4と接続し他端が両側より前脚電磁石21を挟持する2本の前脚スタンド1Bが取り付けられている。前脚電磁石21の中心には前脚電磁石コア2A、後脚電磁石22の中心には後脚電磁石コア2Bが配されている。中間ホルダー4の一端である中間ホルダー接続端4Cはワッシャー8を介して前脚ホルダー3の一端である前脚ホルダー接続端3Cと回転可能に接続されている。
【0016】
後脚ホルダー5と中間ホルダー4のそれぞれの頂部は、ストッパー6にて固定されたバネ性あるリーフスプリング7が橋渡し的に弾力的に繋がれており、圧電素子による伸長、収縮が繰り返されても後脚ホルダー5と中間ホルダー4は常に安定した相互位置関係が保持されている。
【0017】
後脚ホルダー5と中間ホルダー4のそれぞれの頂部下方に圧電素子9が挟持され、該圧電素子9の伸長収縮に伴って後脚ホルダー5と中間ホルダー4間の距離が変化する。バネ性あるリーフスプリング7を基点として圧電素子の伸長収縮は更に遠い地点に位置する前脚スタンド1A先端および後脚スタンド1B先端には、より増幅されてその変位が現れ、移動装置としての前進機能に更に貢献する。
【0018】
前述のとおり中間ホルダー接続端4Cと前脚ホルダー接続端3Cはワッシャー8を介して回転可能に接続されているので、2本の前脚スタンド1Aと2本の後脚スタンド1Bは中間ホルダー4を介して自由度を持つこととなり、例え床面が歪曲していたとしても移動装置直下の床面形状にしたがって2本の前脚スタンド1Aと2本の後脚スタンド1Bは床面に追従する。
【0019】
移動装置の動作推移について図5にしたがって説明する。
第一ステップ<状態(a)>:
後脚ホルダー5に挟持された後脚電磁石22が通電励磁(ON)され後脚電磁石コア2B、後脚スタンド1B、磁性床面に閉磁路が形成され、後脚スタンド1Bは床面に密着する。下方向き太線矢印は床面吸着を表わす。この時点において前脚ホルダー3に挟持された前脚電磁石21は通電遮断(OFF)されており前脚電磁石コア2A、前脚スタンド1A、磁性床面のループは開磁路であって前脚スタンド1Aは床面密着より解放されている。
第二ステップ<状態(b)>:
2個の圧電素子9を伸長方向に駆動することによって前脚ホルダー3は前進方向に移動し、前脚ホルダー3に取り付けられた前脚スタンド1Aは前進する。
第三ステップ<状態(c)>:
前脚ホルダー3に挟持された電磁石21が通電励磁(ON)され前脚電磁石コア2A、前脚スタンド1A、磁性床面に閉磁路が形成され前脚スタンド1Aは床面に密着する。同時に後脚電磁石22へは通電遮断(OFF)され後脚スタンド1Bは床面への密着より解放される。
第四ステップ<状態(d)>:
前脚スタンド1Aが床面に密着された状態で圧電素子9を収縮方向に駆動することによって中間ホルダー4を介して、後脚ホルダー3に取り付けられた後脚スタンド1Bは前進方向に引き寄せられる。この時点にてワンサイクルは終了し移動装置全体が前進した。
第五ステップ<状態(e)>:
前脚電磁石21へは通電遮断(OFF)され、後脚電磁石22が再度通電励磁(ON)され、第一ステップに戻る。
【0020】
以上の動作を繰り返すことによって所定距離を移動する。直進移動以外の移動については前述したとおりである。
【0021】
本発明による移動装置の動作推移について、電磁石への通電励磁、通電遮断、および圧電素子の駆動による伸長収縮運動について説明したが、電磁石の通電励磁、通電遮断と圧電素子駆動のタイミングについて説明する。一例として前脚電磁石21と後脚電磁石22は方形波で交互に励起し、併せて圧電素子を正弦波で駆動し伸長収縮させる。したがって前脚スタンド1Aと後脚スタンド1Bは階段状に移動する。圧電素子を正弦波で駆動する場合とは別に、正弦波のピーク部分を周期の10%区間カットした信号(ピークカット正弦波)で駆動することも可能である。前者の場合電磁石21および22のオン/オフが切り替わる瞬間に圧電素子が一瞬停止することとなるが、後者による駆動の場合電磁石21および22のオン/オフが切り替わるタイミングの前後一定時間(周期の10%)圧電素子が停止するため、それぞれの動作が確実に行われる。
【0022】
歪曲等自由曲面上を移動するために前脚スタンド1Aと後脚スタンド1Bの間、即ち前脚ホルダー3と後脚ホルダー5の間に中間ホルダー4を採用すると前述した。一般に普及しているジョイント回転機構はベアリング回転機構が主であるが、ベアリング回転機構は回転以外の”がた”が発生しやすく、超精密の移動が要求される場合移動が困難となる危険があるので本実施例においては、ベアリングのごとき点支持ではなくワッシャー等平面支持を採用した。平面支持の場合接触部分の面積が大きいため接触圧は小さくなるが、ベアリングによる転がり摩擦より摩擦力の大きい滑り摩擦となる。しかし接触表面の仕上げを万全にすることにより摩擦力を低減することが出来た。
【0023】
本実施例において電磁石21、22は珪素鋼を採用し、中間ホルダー接続端4Cと後脚ホルダー3C間のワッシャー材質にはりん青銅を採用した。中間ホルダー接続端4Cと後脚ホルダー接続端3Cの材質にはジュラルミンを採用した。ジュラルミンは材質として柔らかく塑性変形しやすく、ジュラルミン同士を接触し圧力を加えると互いに凝着し摩擦が大きくなるが、中間に塑性変形のしにくい硬材質のりん青銅を挟さむと摩擦力を減じさせ滑りが向上する。
【0024】
表面粗さと接触面の粗さにより摩擦係数が変化することは当然だが、材質により摩擦係数が最小となるポイントがある。ジュラルミンとりん青銅の表面を粒度3(μm)のラッピングペーパーにて仕上げた場合が最小の摩擦係数となることが判明した。
【図面の簡単な説明】
【0025】
【図1】本発明によって提案される移動装置の見取り図である。
【図2】移動装置の上面図である。
【図3】移動装置の正面図を示す。
【図4】移動装置の側面図を示す。
【図5】移動装置の動作推移図である。
【符号の説明】
【0026】
1A 前脚スタンド
1B 後脚スタンド
21 前脚電磁石
22 後脚電磁石
2A 前脚電磁石コア
2B 後脚電磁石コア
3 前脚ホルダー
3C 前脚ホルダー接続端
4 中間ホルダー
4C 中間ホルダー接続端
5 後脚ホルダー
6 ストッパー
7 リーフスプリング
8 ワッシャー
9 圧電素子
【特許請求の範囲】
【請求項1】
一端が回転可能に中間ホルダーと接続し他端が両側より電磁石を挟持する2本の前脚スタンドが取り付けられた前脚ホルダー、一端が回転可能に前脚ホルダーと接続し他端が後脚ホルダーと対峙する中間ホルダー、圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが配置され、および両側より電磁石を挟持する2本の後脚スタンドが取り付けられた後脚ホルダーより成る移動装置であって、後脚スタンドに挟持された後脚電磁石が通電励磁され後脚スタンドが磁性床面に密着し、次いで2個の圧電素子が伸長方向に駆動され前脚スタンドが前進し、後脚スタンドに挟持された後脚電磁石が通電遮断され後脚スタンドが床面密着より解放され、次いで前脚スタンドに挟持された前脚電磁石が通電励磁され前脚スタンドが床面に密着し、次いで2個の該圧電素子が収縮方向に駆動され後脚スタンドが前進方向に引き寄せられ、移動装置全体が前進することを特徴とした移動装置。
【請求項2】
駆動された圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に配置され弾力的に接続されたことを特徴とする請求項1の移動装置。
【請求項3】
2本の前脚スタンドと2本の後脚スタンドが床面に常に4点接触することが可能となるよう、前脚ホルダーの一端である前脚ホルダー接続端がワッシャーを介して中間ホルダーの一端である中間ホルダー接続端と回転可能に接続されることを特徴とする請求項2の移動装置。
【請求項4】
前脚ホルダー接続端と中間ホルダー接続端の材質がジュラルミン、該両者間のワッシャーの材質がりん青銅によることを特徴とする請求項3の移動装置。
【請求項5】
両側から電磁石を挟持した2本の前脚スタンドを備えた前脚ホルダーと、前記前脚ホルダーに一端を接続された中間ホルダーと、前記中間ホルダーの他端に連結され、電磁石を挟持する2本の後脚スタンドを備えた後脚ホルダーと、前記中間ホルダーと前記後脚ホルダーとの間に、挟持された圧電素子とを備え、前記中間ホルダーは、前記前脚ホルダーを回転可能に連結する連結手段を有していることを特徴とする移動装置。
【請求項6】
請求項5において、前記中間ホルダーと前記後脚ホルダーとは、更に、リーフスプリングによって連結されていることを特徴とする移動装置。
【請求項1】
一端が回転可能に中間ホルダーと接続し他端が両側より電磁石を挟持する2本の前脚スタンドが取り付けられた前脚ホルダー、一端が回転可能に前脚ホルダーと接続し他端が後脚ホルダーと対峙する中間ホルダー、圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが配置され、および両側より電磁石を挟持する2本の後脚スタンドが取り付けられた後脚ホルダーより成る移動装置であって、後脚スタンドに挟持された後脚電磁石が通電励磁され後脚スタンドが磁性床面に密着し、次いで2個の圧電素子が伸長方向に駆動され前脚スタンドが前進し、後脚スタンドに挟持された後脚電磁石が通電遮断され後脚スタンドが床面密着より解放され、次いで前脚スタンドに挟持された前脚電磁石が通電励磁され前脚スタンドが床面に密着し、次いで2個の該圧電素子が収縮方向に駆動され後脚スタンドが前進方向に引き寄せられ、移動装置全体が前進することを特徴とした移動装置。
【請求項2】
駆動された圧電素子の伸長収縮運動が確実に前脚又は後脚に伝達されるよう後脚ホルダーと中間ホルダーの両端頂部に各2個のストッパーにより固定された2枚のバネ性あるリーフスプリングが橋渡し状に配置され弾力的に接続されたことを特徴とする請求項1の移動装置。
【請求項3】
2本の前脚スタンドと2本の後脚スタンドが床面に常に4点接触することが可能となるよう、前脚ホルダーの一端である前脚ホルダー接続端がワッシャーを介して中間ホルダーの一端である中間ホルダー接続端と回転可能に接続されることを特徴とする請求項2の移動装置。
【請求項4】
前脚ホルダー接続端と中間ホルダー接続端の材質がジュラルミン、該両者間のワッシャーの材質がりん青銅によることを特徴とする請求項3の移動装置。
【請求項5】
両側から電磁石を挟持した2本の前脚スタンドを備えた前脚ホルダーと、前記前脚ホルダーに一端を接続された中間ホルダーと、前記中間ホルダーの他端に連結され、電磁石を挟持する2本の後脚スタンドを備えた後脚ホルダーと、前記中間ホルダーと前記後脚ホルダーとの間に、挟持された圧電素子とを備え、前記中間ホルダーは、前記前脚ホルダーを回転可能に連結する連結手段を有していることを特徴とする移動装置。
【請求項6】
請求項5において、前記中間ホルダーと前記後脚ホルダーとは、更に、リーフスプリングによって連結されていることを特徴とする移動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−126396(P2008−126396A)
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願番号】特願2006−317958(P2006−317958)
【出願日】平成18年11月27日(2006.11.27)
【出願人】(505246066)株式会社アプライド・マイクロシステム (7)
【Fターム(参考)】
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願日】平成18年11月27日(2006.11.27)
【出願人】(505246066)株式会社アプライド・マイクロシステム (7)
【Fターム(参考)】
[ Back to top ]