
マイクロ波エミッタを使用して部品を監視する方法およびシステム
【課題】マイクロ波を利用し測定範囲を広げると共に、その高い周波数特性により、測定精度を上げる。
【解決手段】センサアセンブリ110を備え、センサアセンブリ110は、少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場209を発生させるマイクロ波エミッタ206を備える少なくとも1つのプローブ202であって、部品が少なくとも1つの電磁場と相互作用すると、マイクロ波エミッタに負荷が生じるプローブと、マイクロ波エミッタに結合されたデータコンジット115であって、負荷を表す少なくとも1つの負荷信号が、マイクロ波エミッタからデータコンジット内に反射されるデータコンジットと、少なくとも1つの負荷信号を受信し、部品を監視するのに使用される電気出力を生成するように構成された少なくとも1つの信号処理器200とを備える、部品104の監視システム。
【解決手段】センサアセンブリ110を備え、センサアセンブリ110は、少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場209を発生させるマイクロ波エミッタ206を備える少なくとも1つのプローブ202であって、部品が少なくとも1つの電磁場と相互作用すると、マイクロ波エミッタに負荷が生じるプローブと、マイクロ波エミッタに結合されたデータコンジット115であって、負荷を表す少なくとも1つの負荷信号が、マイクロ波エミッタからデータコンジット内に反射されるデータコンジットと、少なくとも1つの負荷信号を受信し、部品を監視するのに使用される電気出力を生成するように構成された少なくとも1つの信号処理器200とを備える、部品104の監視システム。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の分野は、一般に監視システムに関し、より詳細には、マイクロ波エミッタに対する部品の近接度を測定する方法およびシステムに関する。
【背景技術】
【0002】
発電システムなどの少なくとも一部の周知の機械は、時間とともに破損したり、摩耗したりすることがある1つまたは複数の部品を備える。例えば、周知のタービンは、ベアリング、ギア、および/またはロータブレードなど、時間とともに摩耗する部品を備える。摩耗した部品で動作を続けると、さらに他の部品の破損を引き起こす場合や、部品またはシステムの早期故障を招く場合がある。
【0003】
機械内での部品の破損を検出するために、少なくとも一部の周知の機械の動作は、監視システムを用いて保守される。少なくとも一部の周知の監視システムは、センサを使用して、システムの少なくとも一部の部品の近接度測定を行う。近接度測定は、渦電流センサ、マグネチックピックアップセンサ、または容量センサを使用して行うことができる。しかし、このようなピックアップセンサの測定範囲は限られているので、ピックアップセンサが使用できる位置も限られてしまう場合がある。さらに、このようなピックアップセンサの周波数特性は、一般に低いので、センサの精度が限られてしまう場合がある。
【発明の概要】
【0004】
一実施形態では、マイクロ波エミッタに対する部品の近接度を測定する方法が提供される。この方法は、マイクロ波エミッタに少なくとも1つのマイクロ波信号を送信することを含む。マイクロ波エミッタによって、このマイクロ波信号から、少なくとも1つの電磁場が生成される。さらに、この方法は、部品と電磁場の間の相互作用によって、マイクロ波エミッタに負荷を生じさせ、この負荷を表す少なくとも1つの離調された負荷信号を、マイクロ波エミッタからデータコンジット内へ反射させることを含む。この離調された負荷信号は、少なくとも1つの信号処理器によって受信される。次に、この信号処理器が、この負荷信号に基づいて、マイクロ波エミッタに対する部品の近接度を測定する。この信号処理器によって、電気出力が生成される。
【0005】
別の実施形態では、部品の監視システムが提供される。この監視システムは、センサアセンブリを備える。センサアセンブリは、マイクロ波エミッタを有する少なくとも1つのプローブを備える。このマイクロ波エミッタが、少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場を発生させ、部品がこの電磁場と相互作用したときに、マイクロ波エミッタに負荷が生じる。さらに、センサアセンブリは、マイクロ波エミッタに結合されたデータコンジットを備え、負荷を表す少なくとも1つの離調された負荷信号が、マイクロ波エミッタからこのデータコンジット内に反射される。また、センサアセンブリは、少なくとも1つの信号処理器を備え、この信号処理器は、離調された負荷信号を受信し、部品を監視するのに使用される電気出力を生成するように構成されている。
【0006】
別の実施形態では、部品の監視システムが提供される。この監視システムは、センサアセンブリと、センサアセンブリに結合された診断システムとを備える。センサアセンブリは、マイクロ波エミッタを有する少なくとも1つのプローブを備える。このマイクロ波エミッタが、少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場を発生させ、部品がこの電磁場と相互作用したときに、マイクロ波エミッタに負荷が生じる。さらに、センサアセンブリは、マイクロ波エミッタに結合されたデータコンジットを備え、負荷を表す少なくとも1つの離調された負荷信号が、マイクロ波エミッタからこのデータコンジット内に反射される。また、センサアセンブリは、少なくとも1つの信号処理器を備え、この信号処理器は、離調された負荷信号を受信し、部品を監視するのに使用される電気出力を生成するように構成されている。
【図面の簡単な説明】
【0007】
【図1】例示的な動力システムの構成図である。
【図2】図1に示す動力システムで使用することができる例示的なセンサアセンブリの構成図である。
【図3】図1に示す動力システムで使用することができる例示的な診断システムの構成図である。
【図4】図1に示す動力システムで使用することができる例示的な表示器の構成図である。
【図5】図1に示す動力システムで使用することができるマイクロ波エミッタに対する部品の近接度を測定する例示的な方法の流れ図である。
【発明を実施するための形態】
【0008】
本明細書に記載される例示的な方法、装置、およびシステムによって、周知の部品監視システムに付随する少なくともいくつかの欠点が解消される。特に、本明細書に記載される実施形態では、マイクロ波エミッタを使用して近接度測定を行う監視システムが提供される。周知の監視システムで使用される周知の渦電流センサ、マグネチックピックアップセンサ、または容量センサに比べて、マイクロ波エミッタは、より広い測定範囲と、より高い周波数特性を提供する。
【0009】
図1は、これらに限定はされないが、風力タービン、水力発電タービン、ガスタービン、および/またはコンプレッサなどの機械102を備える例示的な動力システム100を示す。例示的な実施形態では、機械102は、発電機などの負荷106に結合されたドライブシャフト104を回転させる。本明細書で使用される「結合」という用語は、2つの部品が直接的に機械的および/または電気的に接続されることを限定するものではなく、複数の部品が間接的に機械的および/または電気的に接続されることも含み得るということに留意されたい。
【0010】
例示的な実施形態では、ドライブシャフト104は、機械102内および/または負荷106内に収容された1つまたは複数のベアリング(図示せず)によって、少なくとも部分的に支持される。あるいは、またはさらには、ベアリングは、ギヤボックスなどの別個の支持構造体108内、または、動力システム100が本明細書に記載されるように機能するのを可能にする任意の他の構造体内に収容されてもよい。
【0011】
例示的な実施形態では、動力システム100は監視システム109を備え、この監視システム109は、機械102、ドライブシャフト104、負荷106の少なくとも1つの動作状態、および/または動力システム100が本明細書に記載されるように機能するのを可能にする任意の他の部品の少なくとも1つの動作状態を、測定および/または監視する少なくとも1つのセンサアセンブリ110を備える。より具体的には、例示的な実施形態では、センサアセンブリ110は、近接度センサアセンブリ110であり、ドライブシャフト104とセンサアセンブリ110の間の距離(図1には示さない)の測定および/または監視に使用するために、ドライブシャフト104に極めて接近させて配置される。さらに、例示的な実施形態では、センサアセンブリ110は、センサアセンブリ110に対する動力システム100の部品の静的近接度および/または振動近接度などの近接度を測定するために、1つまたは複数のマイクロ波信号を使用する。本明細書で使用される「マイクロ波」という用語は、約300メガヘルツ(MHz)から約300ギガヘルツ(GHz)の間の周波数を有する信号、または、そのような信号を受信および/または送信する部品に対して使用される。あるいは、センサアセンブリ110を、動力システム100の任意の他の部品を測定および/または監視するために使用し、および/または監視システム109が本明細書に記載されるように機能するのを可能にする任意の他のセンサアセンブリまたは変換器アセンブリとすることができる。
【0012】
例示的な実施形態では、それぞれのセンサアセンブリ110は、動力システム100内の任意の相対的位置に配置される。さらに、例示的な実施形態では、監視システム109は、1つまたは複数のセンサアセンブリ110に結合された診断システム112を備える。診断システム112は、センサアセンブリ110によって生成された1つまたは複数の信号を処理および/または分析する。本明細書で使用される「処理」という用語は、信号の少なくとも1つの特性を調整、フィルタリング、バッファリング、および/または、変化させる動作を行うことを示す。より具体的には、例示的な実施形態では、センサアセンブリ110は、データコンジット113またはデータコンジット115を介して診断システム112に結合される。あるいは、センサアセンブリ110は、診断システム112にワイヤレスに結合されてもよい。
【0013】
診断システム112は、センサアセンブリ110によって生成された1つまたは複数の信号を処理および/または分析すると、次いで、処理済みの信号を、表示器116に送信する。この表示器116も、監視システム109に含まれる。表示器116は、データコンジット118を介して、診断システム112に結合される。より具体的には、例示的な実施形態では、データコンジット118を介して表示器116に信号が送信されて、ユーザに向けて表示または出力される。あるいは、表示器116は、診断システム112にワイヤレスに結合されてもよい。
【0014】
例示的な実施形態では、動作中に、摩耗、破損、または振動によって、例えば、ドライブシャフト104などの動力システム100の1つまたは複数の部品は、1つまたは複数のセンサアセンブリ110に対する位置が変化する場合がある。例えば、部品に振動が生じたり、および/または、動力システム100内の動作温度が変化するにつれて、部品が膨張または収縮したりする場合がある。例示的な実施形態では、センサアセンブリ110は、静的近接度および/または振動近接度などの近接度、および/またはセンサアセンブリ110に対する部品の相対的位置を測定および/または監視し、測定された近接度および/または部品の相対的位置を表す信号(以下「近接度測定信号」と呼ぶ)を、処理および/または分析するために、診断システム112に送信する。
【0015】
診断システム112が、近接度測定信号を処理および/または分析すると、次いで、この近接度測定信号が表示器116に送信されて、ユーザに向けて表示または出力される。例示的な実施形態では、表示器116は、近接度測定値の表示を、グラフまたはテキストによって提供する。表示器116は、波形、アラート、アラーム、シャットダウン、チャートおよび/またはグラフなどの、さまざまな形による信号表示を提供することができる。
【0016】
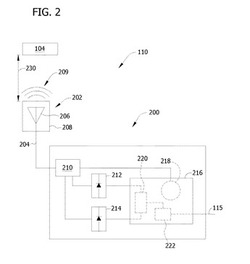
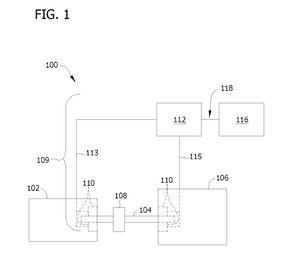
図2は、動力システム100(図1に示す)で使用することができるセンサアセンブリ110の概略図である。例示的な実施形態では、センサアセンブリ110は、信号処理器200と、データコンジット204を介して信号処理器200に結合されたプローブ202とを備える。あるいは、プローブ202は、信号処理器200にワイヤレスに結合されてもよい。
【0017】
さらに、例示的な実施形態では、プローブ202は、エミッタ206を備える。このエミッタ206は、プローブハウジング208に結合され、および/またはプローブハウジング208内に配置され、電磁場209を発生させる。エミッタ206は、データコンジット204を介して信号処理器200に結合される。あるいは、エミッタ206は、信号処理器200にワイヤレスに結合されてもよい。より具体的には、例示的な実施形態では、プローブ202は、マイクロ波エミッタ206を備えるマイクロ波プローブ202である。例示的な実施形態では、データコンジット204は、エミッタ206のインピーダンスと整合するインピーダンスを有する。あるいは、コンジット204は、動力システム100全体にわたってインピーダンスが実質的に一定であることを可能にし、センサアセンブリ110と動力システム100が本明細書に記載されるように機能することを可能にする、任意のインピーダンスを有することができる。
【0018】
さらに、例示的な実施形態では、信号処理器200は、送信電力検出器212、受信電力検出器214、および信号調整器216に結合される方向性結合器210を備える。さらに、例示的な実施形態では、信号調整器216は、信号発生器218、減算器220、および線形化器222を備える。
【0019】
例示的な実施形態では、動作中に、信号発生器218が、エミッタ206の共振周波数と等しいおよび/またはほぼ等しいマイクロ波周波数を有する少なくとも1つの電気信号(以下「マイクロ波信号」と呼ぶ)を発生させる。信号発生器218は、マイクロ波信号を方向性結合器210に送信する。方向性結合器210は、マイクロ波信号を送信電力検出器212およびエミッタ206に送信する。マイクロ波信号が、エミッタ206を通って送信されると、エミッタ206からプローブハウジング208外に電磁場209が放射される。ドライブシャフト104、または機械102(図1に示す)および/または動力システム100の別の部品などの物体が、電磁場209内に入り、および/または電磁場209内での相対的位置を変化させると、その物体と電磁場209の間に電磁結合を起こすことができる。より具体的には、物体内の誘導効果および/または容量効果が、電磁場209の少なくとも一部分を、電流または電荷として物体に誘導結合および/または容量結合させ得るため、電磁場209内に物体が存在し、および/または、このような物体が移動すると、電磁場209が乱れる。このような場合、エミッタ206は離調し(つまり、エミッタ206の共振周波数が、例えば低下および/または変化し)、エミッタ206に負荷が生じる。エミッタ206に負荷が生じると、マイクロ波信号の反射(以下「離調された負荷信号」と呼ぶ)が、データコンジット204を通って方向性結合器210に送信される。例示的な実施形態では、離調された負荷信号は、マイクロ波信号の電力振幅および/または位相に比べて、より小さな電力振幅および/または異なる位相を有する。さらに、例示的な実施形態では、離調された負荷信号の電力振幅は、エミッタ206への物体の近接度に依存する。方向性結合器210は、離調された負荷信号を受信電力検出器214に送信する。
【0020】
例示的な実施形態では、受信電力検出器214は、歪み信号に含まれる電力量を測定し、測定された離調された負荷信号電力を表す信号を信号調整器216に送信する。さらに、送信電力検出器212は、マイクロ波信号に含まれる電力量を検出し、測定されたマイクロ波信号電力を表す信号を信号調整器216に送信する。例示的な実施形態では、減算器220が、測定されたマイクロ波信号電力と、測定された離調された負荷信号電力とを受信し、マイクロ波信号電力と離調された負荷信号電力の差分を算出する。減算器220は、算出された差分を表す信号(以下「電力差分信号」と呼ぶ)を線形化器222に送信する。例示的な実施形態では、電力差分信号の振幅は、電磁場209内のシャフト104などの物体とプローブ202の間に画定される距離230(つまり物体の近接度)に反比例または指数関数的に比例するなど、実質的に比例する。しかし、エミッタ206の形状や別の特性によれば、電力差分信号の振幅は、物体の近接度に対して少なくとも部分的に非線形関係を呈することができる。
【0021】
例示的な実施形態では、線形化器222は、電力差分信号を、物体の近接度と近接度測定信号の振幅との間に実質的な線形関係を呈する電圧出力信号(つまり「近接度測定信号」)などの電気出力に変換する。さらに、例示的な実施形態では、線形化器222は、近接度測定信号を、診断システム112内での処理および/または分析で使用可能な換算係数とともに、診断システム112(図1に示す)に送信する。線形化器222では、アナログ信号処理技術またはデジタル信号処理技術のどちらをも利用することができ、また、これら2つの技術の複合混合型を使用することもできる。例えば、例示的な実施形態では、近接度測定信号は、1ミリメートルあたりの電圧の換算係数を有する。あるいは、近接度測定信号は、診断システム112および/または動力システム100が本明細書に記載されるように機能するのを可能にする任意の他の換算係数を有することができる。
【0022】
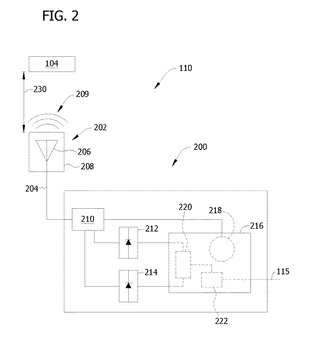
図3は、システム100(図1に示す)で使用することができる診断システム112の構成図である。例示的な実施形態では、診断システム112は、システムバックプレーン302を備える。さらに、例示的な実施形態では、1つまたは複数のセンサアセンブリ110(図1および図2に示す)が、システムバックプレーン302に結合されており、システムバックプレーン302が、データコンジット113またはデータコンジット115を介して、1つまたは複数のセンサアセンブリ110から信号を受信することができるようになっている。
【0023】
さらに、例示的な実施形態では、診断システム112は、システムバックプレーン302に結合された電源304から電力を受信する。あるいは、診断システム112は、システム112が本明細書に記載されるように機能するのを可能にする任意の好適な電力源から電力を受信してもよい。
【0024】
例示的な実施形態では、システムバックプレーン302は、ハウジング306内に配置され、複数の導体(図示せず)を備える診断システムバス(図示せず)を備える。より具体的には、例示的な実施形態では、システムバックプレーン302は、ハウジング306の後方部分308に面して、または隣接して配置され、また、ハウジング306の前方部分310は、外部環境に開口している。ハウジング306は、ハウジング306内に画定された空洞312を備え、この空洞312は、前方部分310と流体連通している。
【0025】
診断システム112は、センサアセンブリ110から受信した少なくとも1つの信号を処理する少なくとも1つの監視モジュール336を備える。例示的な実施形態では、診断システム112は、2つの監視モジュール336を備える。あるいは、診断システム112は、システム112が本明細書に記載されるように機能するのを可能にする任意の個数の監視モジュール336を備えることができる。監視モジュール336は、ハウジング306の前方部分310に結合されており、少なくとも一部分がハウジング306内に配置される。このように、例示的な実施形態では、それぞれのセンサアセンブリ110からの信号は、システムバックプレーン302を通って監視モジュール336に送信される。さらに、少なくとも1つの信号は、異なる監視モジュール336間でも送信され得る。
【0026】
例示的な実施形態では、診断システム112は、また、少なくとも1つのシステム監視モジュール338も備え、この監視モジュール338は、モジュール338の少なくとも一部分がハウジング306内にあるように、ハウジングの前方部分310に結合される。例示的な実施形態では、システム監視モジュール338は、監視モジュール336および/または診断システム112の他の部品から送信されるデータ信号および/またはステータス信号を受信する。システム監視モジュール338は、このデータ信号および/またはステータス信号を処理および/または分析し、この信号が、表示器116(図1に示す)に送信されて、ユーザに向けて表示または出力される。
【0027】
動作中、センサアセンブリ110は、診断システム112に信号を送信する。より具体的には、線形化器222(図2に示す)が、近接度測定信号を、診断システム112内での処理および/または分析で使用可能な換算係数とともに、システムバックプレーン302に送信する。例示的な実施形態では、この信号は、システムバックプレーン302を通って監視モジュール336に送信され、さらに処理および/または分析される。次に、監視モジュール336が、処理済みのデータおよび/または信号を、さらに処理および/または分析するために、システム監視モジュール338に送信する。システム監視モジュール338は、処理済みの信号を、データコンジット118を介して表示器116に送信する。
【0028】
図4は、動力システム100(図1に示す)で使用することができる表示器116を示す。表示器116は、診断システム112(図1および図3に示す)に結合される。より具体的には、例示的な実施形態では、システム監視モジュール338(図3に示す)は、データコンジット118を介して表示器116に結合される。
【0029】
例示的な実施形態では、表示器116は、近接度測定値の表示を、グラフまたはテキストによって提供する。このような表示は、波形、チャート、および/またはグラフの形でユーザに提供される。例えば、表示器116は、陰極線管(CRT)、液晶表示ディスプレイ(LCD)、有機発光ダイオード(OLED)ディスプレイ、および/または電子インクディスプレイなどのディスプレイアダプタ402を備える。また、表示器116を容量型タッチスクリーンディスプレイ、または他の好適な表示器116とすることもできる。
【0030】
さらに、例示的な実施形態では、表示器116は、従来の方式で動作するキーパッド406を備える。ユーザは、接触キーパッド406によって、動力システム100に可能な所望の機能を動作させることができる。例えば、ユーザは、接触キーパッド406によって、見たいと希望する所望の出力表示を入力することができる。
【0031】
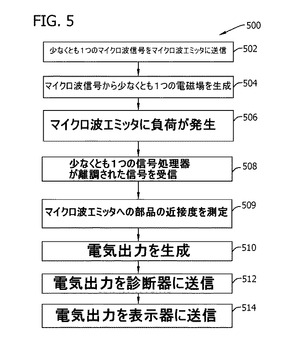
図5は、システム100(図1に示す)などの動力システムで使用することができる、エミッタ206(図2に示す)などのマイクロ波エミッタに対する部品の近接度を測定する、例示的な方法500を示す流れ図である。例示的な実施形態では、少なくとも1つのマイクロ波信号が、マイクロ波エミッタ206に送信される(502)。マイクロ波エミッタ206によって、マイクロ波信号から、少なくとも1つの電磁場209(図2に示す)が生成される(504)。次に、ドライブシャフト104(図1に示す)などの機械部品と電磁場209の間の相互作用によって、マイクロ波エミッタ206に負荷が生じ(506)、この負荷を表す少なくとも1つの離調された負荷信号が、マイクロ波エミッタ206からデータコンジット204(図2に示す)内に反射される。
【0032】
例示的な実施形態では、少なくとも1つの信号処理器200(図2に示す)が、離調された負荷信号を受信する(508)。信号処理器200は、この離調された負荷信号に基づいて、機械部品104のマイクロ波エミッタ206への近接度を算出する(509)。次に、信号処理器200によって電気出力が生成される(510)。この電気出力は、診断システム112(図1および図3に示す)に送信される(512)。次に、この電気出力が、表示器116(図1および図4に示す)に送信されて(514)、ユーザに向けて表示または出力される。
【0033】
前述した実施形態は、機械部品の近接度を測定するのに使用される効率的、また、費用効率的な監視システムを提供する。特に、本明細書に記載される実施形態では、マイクロ波エミッタを使用して近接度測定を行う監視システムが提供される。周知の監視システムで使用される周知の渦電流センサ、マグネチックピックアップセンサ、または容量センサに比べて、マイクロ波エミッタを利用したシステムは、より広い測定範囲と、より高い周波数特性を提供する。このように、機械の近接度を測定するためにマイクロ波エミッタを使用すると、測定範囲が実質的に拡大され、監視システムが使用される位置が実質的に限定されることがない。さらに、周知の渦電流センサまたはマグネチックピックアップセンサに比べて、マイクロ波エミッタは周波数特性が高いので、本明細書に記載される監視システムは、より正確な測定値を提供することができる。
【0034】
マイクロ波エミッタに対する機械の近接度を測定する監視システムおよび方法の例示的な実施形態が、詳細に前述されている。この方法および監視システムは、本明細書に記載される具体的な実施形態に限定されるものではなく、むしろ、監視システムの部品および/または方法のステップは、本明細書に記載される他の部品および/またはステップとは別途、切り離して利用することができる。例えば、この監視システムは、他の測定システムや方法と組み合わせて使用することもでき、本明細書に記載される動力システムによってのみ実行されるものに限定されない。むしろ、例示的な実施形態を、他の多くの測定用途および/または監視用途に関連付けて実施したり、利用したりすることが可能である。
【0035】
本発明のさまざまな実施形態の具体的な特徴は、ある図面には示され、他の図面には示されていないかもしれないが、これは単に便宜上の理由からである。本発明の原理に従って、図面のすべての特徴が、他のすべての図面のすべての特徴と組み合わせて参照および/またはクレームされ得る。
【0036】
本明細書では、最良の形態を含む本発明を開示するため、また、デバイスまたはシステムを作成および使用することと、組み込まれる方法を実行することを含む本発明を、当業者ならだれもが実施できるようにするために、例を用いている。本発明の特許請求の範囲は、請求項によって定義されており、当業者が思い付く他の例を含み得る。こうした他の例は、それらが本請求項の文字言語とは相違しない構成要素を有する場合、またはそれらが本請求項の文字言語とわずかな差異しか有さない等価な構成要素を含んでいる場合は、本特許請求の範囲の範囲内にあるものと考えられる。
【符号の説明】
【0037】
100 動力システム
102 機械
104 ドライブシャフト、機械部品
106 負荷
108 支持構造体
109 監視システム
110 センサアセンブリ
112 診断システム
113 データコンジット
115 データコンジット
116 表示器
118 データコンジット
200 信号処理器
202 プローブ
204 データコンジット
206 エミッタ
208 プローブハウジング
209 電磁場
210 方向性結合器
212 送信電力検出器
214 受信電力検出器
216 信号調整器
218 信号発生器
220 減算器
222 線形化器
230 距離
302 システムバックプレーン
304 電源
306 ハウジング
308 後方部分
310 ハウジングの前方部分
312 空洞
336 監視モジュール
338 システム監視モジュール
402 ディスプレイアダプタ
406 接触キーパッド
500 マイクロ波エミッタに対する部品の近接度を測定するプロセス
502 マイクロ波信号をマイクロ波エミッタに送信
504 マイクロ波エミッタによってマイクロ波信号から電磁場を生成
506 マイクロ波エミッタへの負荷を発生
508 離調された負荷信号を受信
509 マイクロ波エミッタへの機械部品の近接度を算出
510 信号処理器によって電気出力を生成
512 電気出力を診断システムに送信
514 電気出力を表示器に送信
【技術分野】
【0001】
本発明の分野は、一般に監視システムに関し、より詳細には、マイクロ波エミッタに対する部品の近接度を測定する方法およびシステムに関する。
【背景技術】
【0002】
発電システムなどの少なくとも一部の周知の機械は、時間とともに破損したり、摩耗したりすることがある1つまたは複数の部品を備える。例えば、周知のタービンは、ベアリング、ギア、および/またはロータブレードなど、時間とともに摩耗する部品を備える。摩耗した部品で動作を続けると、さらに他の部品の破損を引き起こす場合や、部品またはシステムの早期故障を招く場合がある。
【0003】
機械内での部品の破損を検出するために、少なくとも一部の周知の機械の動作は、監視システムを用いて保守される。少なくとも一部の周知の監視システムは、センサを使用して、システムの少なくとも一部の部品の近接度測定を行う。近接度測定は、渦電流センサ、マグネチックピックアップセンサ、または容量センサを使用して行うことができる。しかし、このようなピックアップセンサの測定範囲は限られているので、ピックアップセンサが使用できる位置も限られてしまう場合がある。さらに、このようなピックアップセンサの周波数特性は、一般に低いので、センサの精度が限られてしまう場合がある。
【発明の概要】
【0004】
一実施形態では、マイクロ波エミッタに対する部品の近接度を測定する方法が提供される。この方法は、マイクロ波エミッタに少なくとも1つのマイクロ波信号を送信することを含む。マイクロ波エミッタによって、このマイクロ波信号から、少なくとも1つの電磁場が生成される。さらに、この方法は、部品と電磁場の間の相互作用によって、マイクロ波エミッタに負荷を生じさせ、この負荷を表す少なくとも1つの離調された負荷信号を、マイクロ波エミッタからデータコンジット内へ反射させることを含む。この離調された負荷信号は、少なくとも1つの信号処理器によって受信される。次に、この信号処理器が、この負荷信号に基づいて、マイクロ波エミッタに対する部品の近接度を測定する。この信号処理器によって、電気出力が生成される。
【0005】
別の実施形態では、部品の監視システムが提供される。この監視システムは、センサアセンブリを備える。センサアセンブリは、マイクロ波エミッタを有する少なくとも1つのプローブを備える。このマイクロ波エミッタが、少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場を発生させ、部品がこの電磁場と相互作用したときに、マイクロ波エミッタに負荷が生じる。さらに、センサアセンブリは、マイクロ波エミッタに結合されたデータコンジットを備え、負荷を表す少なくとも1つの離調された負荷信号が、マイクロ波エミッタからこのデータコンジット内に反射される。また、センサアセンブリは、少なくとも1つの信号処理器を備え、この信号処理器は、離調された負荷信号を受信し、部品を監視するのに使用される電気出力を生成するように構成されている。
【0006】
別の実施形態では、部品の監視システムが提供される。この監視システムは、センサアセンブリと、センサアセンブリに結合された診断システムとを備える。センサアセンブリは、マイクロ波エミッタを有する少なくとも1つのプローブを備える。このマイクロ波エミッタが、少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場を発生させ、部品がこの電磁場と相互作用したときに、マイクロ波エミッタに負荷が生じる。さらに、センサアセンブリは、マイクロ波エミッタに結合されたデータコンジットを備え、負荷を表す少なくとも1つの離調された負荷信号が、マイクロ波エミッタからこのデータコンジット内に反射される。また、センサアセンブリは、少なくとも1つの信号処理器を備え、この信号処理器は、離調された負荷信号を受信し、部品を監視するのに使用される電気出力を生成するように構成されている。
【図面の簡単な説明】
【0007】
【図1】例示的な動力システムの構成図である。
【図2】図1に示す動力システムで使用することができる例示的なセンサアセンブリの構成図である。
【図3】図1に示す動力システムで使用することができる例示的な診断システムの構成図である。
【図4】図1に示す動力システムで使用することができる例示的な表示器の構成図である。
【図5】図1に示す動力システムで使用することができるマイクロ波エミッタに対する部品の近接度を測定する例示的な方法の流れ図である。
【発明を実施するための形態】
【0008】
本明細書に記載される例示的な方法、装置、およびシステムによって、周知の部品監視システムに付随する少なくともいくつかの欠点が解消される。特に、本明細書に記載される実施形態では、マイクロ波エミッタを使用して近接度測定を行う監視システムが提供される。周知の監視システムで使用される周知の渦電流センサ、マグネチックピックアップセンサ、または容量センサに比べて、マイクロ波エミッタは、より広い測定範囲と、より高い周波数特性を提供する。
【0009】
図1は、これらに限定はされないが、風力タービン、水力発電タービン、ガスタービン、および/またはコンプレッサなどの機械102を備える例示的な動力システム100を示す。例示的な実施形態では、機械102は、発電機などの負荷106に結合されたドライブシャフト104を回転させる。本明細書で使用される「結合」という用語は、2つの部品が直接的に機械的および/または電気的に接続されることを限定するものではなく、複数の部品が間接的に機械的および/または電気的に接続されることも含み得るということに留意されたい。
【0010】
例示的な実施形態では、ドライブシャフト104は、機械102内および/または負荷106内に収容された1つまたは複数のベアリング(図示せず)によって、少なくとも部分的に支持される。あるいは、またはさらには、ベアリングは、ギヤボックスなどの別個の支持構造体108内、または、動力システム100が本明細書に記載されるように機能するのを可能にする任意の他の構造体内に収容されてもよい。
【0011】
例示的な実施形態では、動力システム100は監視システム109を備え、この監視システム109は、機械102、ドライブシャフト104、負荷106の少なくとも1つの動作状態、および/または動力システム100が本明細書に記載されるように機能するのを可能にする任意の他の部品の少なくとも1つの動作状態を、測定および/または監視する少なくとも1つのセンサアセンブリ110を備える。より具体的には、例示的な実施形態では、センサアセンブリ110は、近接度センサアセンブリ110であり、ドライブシャフト104とセンサアセンブリ110の間の距離(図1には示さない)の測定および/または監視に使用するために、ドライブシャフト104に極めて接近させて配置される。さらに、例示的な実施形態では、センサアセンブリ110は、センサアセンブリ110に対する動力システム100の部品の静的近接度および/または振動近接度などの近接度を測定するために、1つまたは複数のマイクロ波信号を使用する。本明細書で使用される「マイクロ波」という用語は、約300メガヘルツ(MHz)から約300ギガヘルツ(GHz)の間の周波数を有する信号、または、そのような信号を受信および/または送信する部品に対して使用される。あるいは、センサアセンブリ110を、動力システム100の任意の他の部品を測定および/または監視するために使用し、および/または監視システム109が本明細書に記載されるように機能するのを可能にする任意の他のセンサアセンブリまたは変換器アセンブリとすることができる。
【0012】
例示的な実施形態では、それぞれのセンサアセンブリ110は、動力システム100内の任意の相対的位置に配置される。さらに、例示的な実施形態では、監視システム109は、1つまたは複数のセンサアセンブリ110に結合された診断システム112を備える。診断システム112は、センサアセンブリ110によって生成された1つまたは複数の信号を処理および/または分析する。本明細書で使用される「処理」という用語は、信号の少なくとも1つの特性を調整、フィルタリング、バッファリング、および/または、変化させる動作を行うことを示す。より具体的には、例示的な実施形態では、センサアセンブリ110は、データコンジット113またはデータコンジット115を介して診断システム112に結合される。あるいは、センサアセンブリ110は、診断システム112にワイヤレスに結合されてもよい。
【0013】
診断システム112は、センサアセンブリ110によって生成された1つまたは複数の信号を処理および/または分析すると、次いで、処理済みの信号を、表示器116に送信する。この表示器116も、監視システム109に含まれる。表示器116は、データコンジット118を介して、診断システム112に結合される。より具体的には、例示的な実施形態では、データコンジット118を介して表示器116に信号が送信されて、ユーザに向けて表示または出力される。あるいは、表示器116は、診断システム112にワイヤレスに結合されてもよい。
【0014】
例示的な実施形態では、動作中に、摩耗、破損、または振動によって、例えば、ドライブシャフト104などの動力システム100の1つまたは複数の部品は、1つまたは複数のセンサアセンブリ110に対する位置が変化する場合がある。例えば、部品に振動が生じたり、および/または、動力システム100内の動作温度が変化するにつれて、部品が膨張または収縮したりする場合がある。例示的な実施形態では、センサアセンブリ110は、静的近接度および/または振動近接度などの近接度、および/またはセンサアセンブリ110に対する部品の相対的位置を測定および/または監視し、測定された近接度および/または部品の相対的位置を表す信号(以下「近接度測定信号」と呼ぶ)を、処理および/または分析するために、診断システム112に送信する。
【0015】
診断システム112が、近接度測定信号を処理および/または分析すると、次いで、この近接度測定信号が表示器116に送信されて、ユーザに向けて表示または出力される。例示的な実施形態では、表示器116は、近接度測定値の表示を、グラフまたはテキストによって提供する。表示器116は、波形、アラート、アラーム、シャットダウン、チャートおよび/またはグラフなどの、さまざまな形による信号表示を提供することができる。
【0016】
図2は、動力システム100(図1に示す)で使用することができるセンサアセンブリ110の概略図である。例示的な実施形態では、センサアセンブリ110は、信号処理器200と、データコンジット204を介して信号処理器200に結合されたプローブ202とを備える。あるいは、プローブ202は、信号処理器200にワイヤレスに結合されてもよい。
【0017】
さらに、例示的な実施形態では、プローブ202は、エミッタ206を備える。このエミッタ206は、プローブハウジング208に結合され、および/またはプローブハウジング208内に配置され、電磁場209を発生させる。エミッタ206は、データコンジット204を介して信号処理器200に結合される。あるいは、エミッタ206は、信号処理器200にワイヤレスに結合されてもよい。より具体的には、例示的な実施形態では、プローブ202は、マイクロ波エミッタ206を備えるマイクロ波プローブ202である。例示的な実施形態では、データコンジット204は、エミッタ206のインピーダンスと整合するインピーダンスを有する。あるいは、コンジット204は、動力システム100全体にわたってインピーダンスが実質的に一定であることを可能にし、センサアセンブリ110と動力システム100が本明細書に記載されるように機能することを可能にする、任意のインピーダンスを有することができる。
【0018】
さらに、例示的な実施形態では、信号処理器200は、送信電力検出器212、受信電力検出器214、および信号調整器216に結合される方向性結合器210を備える。さらに、例示的な実施形態では、信号調整器216は、信号発生器218、減算器220、および線形化器222を備える。
【0019】
例示的な実施形態では、動作中に、信号発生器218が、エミッタ206の共振周波数と等しいおよび/またはほぼ等しいマイクロ波周波数を有する少なくとも1つの電気信号(以下「マイクロ波信号」と呼ぶ)を発生させる。信号発生器218は、マイクロ波信号を方向性結合器210に送信する。方向性結合器210は、マイクロ波信号を送信電力検出器212およびエミッタ206に送信する。マイクロ波信号が、エミッタ206を通って送信されると、エミッタ206からプローブハウジング208外に電磁場209が放射される。ドライブシャフト104、または機械102(図1に示す)および/または動力システム100の別の部品などの物体が、電磁場209内に入り、および/または電磁場209内での相対的位置を変化させると、その物体と電磁場209の間に電磁結合を起こすことができる。より具体的には、物体内の誘導効果および/または容量効果が、電磁場209の少なくとも一部分を、電流または電荷として物体に誘導結合および/または容量結合させ得るため、電磁場209内に物体が存在し、および/または、このような物体が移動すると、電磁場209が乱れる。このような場合、エミッタ206は離調し(つまり、エミッタ206の共振周波数が、例えば低下および/または変化し)、エミッタ206に負荷が生じる。エミッタ206に負荷が生じると、マイクロ波信号の反射(以下「離調された負荷信号」と呼ぶ)が、データコンジット204を通って方向性結合器210に送信される。例示的な実施形態では、離調された負荷信号は、マイクロ波信号の電力振幅および/または位相に比べて、より小さな電力振幅および/または異なる位相を有する。さらに、例示的な実施形態では、離調された負荷信号の電力振幅は、エミッタ206への物体の近接度に依存する。方向性結合器210は、離調された負荷信号を受信電力検出器214に送信する。
【0020】
例示的な実施形態では、受信電力検出器214は、歪み信号に含まれる電力量を測定し、測定された離調された負荷信号電力を表す信号を信号調整器216に送信する。さらに、送信電力検出器212は、マイクロ波信号に含まれる電力量を検出し、測定されたマイクロ波信号電力を表す信号を信号調整器216に送信する。例示的な実施形態では、減算器220が、測定されたマイクロ波信号電力と、測定された離調された負荷信号電力とを受信し、マイクロ波信号電力と離調された負荷信号電力の差分を算出する。減算器220は、算出された差分を表す信号(以下「電力差分信号」と呼ぶ)を線形化器222に送信する。例示的な実施形態では、電力差分信号の振幅は、電磁場209内のシャフト104などの物体とプローブ202の間に画定される距離230(つまり物体の近接度)に反比例または指数関数的に比例するなど、実質的に比例する。しかし、エミッタ206の形状や別の特性によれば、電力差分信号の振幅は、物体の近接度に対して少なくとも部分的に非線形関係を呈することができる。
【0021】
例示的な実施形態では、線形化器222は、電力差分信号を、物体の近接度と近接度測定信号の振幅との間に実質的な線形関係を呈する電圧出力信号(つまり「近接度測定信号」)などの電気出力に変換する。さらに、例示的な実施形態では、線形化器222は、近接度測定信号を、診断システム112内での処理および/または分析で使用可能な換算係数とともに、診断システム112(図1に示す)に送信する。線形化器222では、アナログ信号処理技術またはデジタル信号処理技術のどちらをも利用することができ、また、これら2つの技術の複合混合型を使用することもできる。例えば、例示的な実施形態では、近接度測定信号は、1ミリメートルあたりの電圧の換算係数を有する。あるいは、近接度測定信号は、診断システム112および/または動力システム100が本明細書に記載されるように機能するのを可能にする任意の他の換算係数を有することができる。
【0022】
図3は、システム100(図1に示す)で使用することができる診断システム112の構成図である。例示的な実施形態では、診断システム112は、システムバックプレーン302を備える。さらに、例示的な実施形態では、1つまたは複数のセンサアセンブリ110(図1および図2に示す)が、システムバックプレーン302に結合されており、システムバックプレーン302が、データコンジット113またはデータコンジット115を介して、1つまたは複数のセンサアセンブリ110から信号を受信することができるようになっている。
【0023】
さらに、例示的な実施形態では、診断システム112は、システムバックプレーン302に結合された電源304から電力を受信する。あるいは、診断システム112は、システム112が本明細書に記載されるように機能するのを可能にする任意の好適な電力源から電力を受信してもよい。
【0024】
例示的な実施形態では、システムバックプレーン302は、ハウジング306内に配置され、複数の導体(図示せず)を備える診断システムバス(図示せず)を備える。より具体的には、例示的な実施形態では、システムバックプレーン302は、ハウジング306の後方部分308に面して、または隣接して配置され、また、ハウジング306の前方部分310は、外部環境に開口している。ハウジング306は、ハウジング306内に画定された空洞312を備え、この空洞312は、前方部分310と流体連通している。
【0025】
診断システム112は、センサアセンブリ110から受信した少なくとも1つの信号を処理する少なくとも1つの監視モジュール336を備える。例示的な実施形態では、診断システム112は、2つの監視モジュール336を備える。あるいは、診断システム112は、システム112が本明細書に記載されるように機能するのを可能にする任意の個数の監視モジュール336を備えることができる。監視モジュール336は、ハウジング306の前方部分310に結合されており、少なくとも一部分がハウジング306内に配置される。このように、例示的な実施形態では、それぞれのセンサアセンブリ110からの信号は、システムバックプレーン302を通って監視モジュール336に送信される。さらに、少なくとも1つの信号は、異なる監視モジュール336間でも送信され得る。
【0026】
例示的な実施形態では、診断システム112は、また、少なくとも1つのシステム監視モジュール338も備え、この監視モジュール338は、モジュール338の少なくとも一部分がハウジング306内にあるように、ハウジングの前方部分310に結合される。例示的な実施形態では、システム監視モジュール338は、監視モジュール336および/または診断システム112の他の部品から送信されるデータ信号および/またはステータス信号を受信する。システム監視モジュール338は、このデータ信号および/またはステータス信号を処理および/または分析し、この信号が、表示器116(図1に示す)に送信されて、ユーザに向けて表示または出力される。
【0027】
動作中、センサアセンブリ110は、診断システム112に信号を送信する。より具体的には、線形化器222(図2に示す)が、近接度測定信号を、診断システム112内での処理および/または分析で使用可能な換算係数とともに、システムバックプレーン302に送信する。例示的な実施形態では、この信号は、システムバックプレーン302を通って監視モジュール336に送信され、さらに処理および/または分析される。次に、監視モジュール336が、処理済みのデータおよび/または信号を、さらに処理および/または分析するために、システム監視モジュール338に送信する。システム監視モジュール338は、処理済みの信号を、データコンジット118を介して表示器116に送信する。
【0028】
図4は、動力システム100(図1に示す)で使用することができる表示器116を示す。表示器116は、診断システム112(図1および図3に示す)に結合される。より具体的には、例示的な実施形態では、システム監視モジュール338(図3に示す)は、データコンジット118を介して表示器116に結合される。
【0029】
例示的な実施形態では、表示器116は、近接度測定値の表示を、グラフまたはテキストによって提供する。このような表示は、波形、チャート、および/またはグラフの形でユーザに提供される。例えば、表示器116は、陰極線管(CRT)、液晶表示ディスプレイ(LCD)、有機発光ダイオード(OLED)ディスプレイ、および/または電子インクディスプレイなどのディスプレイアダプタ402を備える。また、表示器116を容量型タッチスクリーンディスプレイ、または他の好適な表示器116とすることもできる。
【0030】
さらに、例示的な実施形態では、表示器116は、従来の方式で動作するキーパッド406を備える。ユーザは、接触キーパッド406によって、動力システム100に可能な所望の機能を動作させることができる。例えば、ユーザは、接触キーパッド406によって、見たいと希望する所望の出力表示を入力することができる。
【0031】
図5は、システム100(図1に示す)などの動力システムで使用することができる、エミッタ206(図2に示す)などのマイクロ波エミッタに対する部品の近接度を測定する、例示的な方法500を示す流れ図である。例示的な実施形態では、少なくとも1つのマイクロ波信号が、マイクロ波エミッタ206に送信される(502)。マイクロ波エミッタ206によって、マイクロ波信号から、少なくとも1つの電磁場209(図2に示す)が生成される(504)。次に、ドライブシャフト104(図1に示す)などの機械部品と電磁場209の間の相互作用によって、マイクロ波エミッタ206に負荷が生じ(506)、この負荷を表す少なくとも1つの離調された負荷信号が、マイクロ波エミッタ206からデータコンジット204(図2に示す)内に反射される。
【0032】
例示的な実施形態では、少なくとも1つの信号処理器200(図2に示す)が、離調された負荷信号を受信する(508)。信号処理器200は、この離調された負荷信号に基づいて、機械部品104のマイクロ波エミッタ206への近接度を算出する(509)。次に、信号処理器200によって電気出力が生成される(510)。この電気出力は、診断システム112(図1および図3に示す)に送信される(512)。次に、この電気出力が、表示器116(図1および図4に示す)に送信されて(514)、ユーザに向けて表示または出力される。
【0033】
前述した実施形態は、機械部品の近接度を測定するのに使用される効率的、また、費用効率的な監視システムを提供する。特に、本明細書に記載される実施形態では、マイクロ波エミッタを使用して近接度測定を行う監視システムが提供される。周知の監視システムで使用される周知の渦電流センサ、マグネチックピックアップセンサ、または容量センサに比べて、マイクロ波エミッタを利用したシステムは、より広い測定範囲と、より高い周波数特性を提供する。このように、機械の近接度を測定するためにマイクロ波エミッタを使用すると、測定範囲が実質的に拡大され、監視システムが使用される位置が実質的に限定されることがない。さらに、周知の渦電流センサまたはマグネチックピックアップセンサに比べて、マイクロ波エミッタは周波数特性が高いので、本明細書に記載される監視システムは、より正確な測定値を提供することができる。
【0034】
マイクロ波エミッタに対する機械の近接度を測定する監視システムおよび方法の例示的な実施形態が、詳細に前述されている。この方法および監視システムは、本明細書に記載される具体的な実施形態に限定されるものではなく、むしろ、監視システムの部品および/または方法のステップは、本明細書に記載される他の部品および/またはステップとは別途、切り離して利用することができる。例えば、この監視システムは、他の測定システムや方法と組み合わせて使用することもでき、本明細書に記載される動力システムによってのみ実行されるものに限定されない。むしろ、例示的な実施形態を、他の多くの測定用途および/または監視用途に関連付けて実施したり、利用したりすることが可能である。
【0035】
本発明のさまざまな実施形態の具体的な特徴は、ある図面には示され、他の図面には示されていないかもしれないが、これは単に便宜上の理由からである。本発明の原理に従って、図面のすべての特徴が、他のすべての図面のすべての特徴と組み合わせて参照および/またはクレームされ得る。
【0036】
本明細書では、最良の形態を含む本発明を開示するため、また、デバイスまたはシステムを作成および使用することと、組み込まれる方法を実行することを含む本発明を、当業者ならだれもが実施できるようにするために、例を用いている。本発明の特許請求の範囲は、請求項によって定義されており、当業者が思い付く他の例を含み得る。こうした他の例は、それらが本請求項の文字言語とは相違しない構成要素を有する場合、またはそれらが本請求項の文字言語とわずかな差異しか有さない等価な構成要素を含んでいる場合は、本特許請求の範囲の範囲内にあるものと考えられる。
【符号の説明】
【0037】
100 動力システム
102 機械
104 ドライブシャフト、機械部品
106 負荷
108 支持構造体
109 監視システム
110 センサアセンブリ
112 診断システム
113 データコンジット
115 データコンジット
116 表示器
118 データコンジット
200 信号処理器
202 プローブ
204 データコンジット
206 エミッタ
208 プローブハウジング
209 電磁場
210 方向性結合器
212 送信電力検出器
214 受信電力検出器
216 信号調整器
218 信号発生器
220 減算器
222 線形化器
230 距離
302 システムバックプレーン
304 電源
306 ハウジング
308 後方部分
310 ハウジングの前方部分
312 空洞
336 監視モジュール
338 システム監視モジュール
402 ディスプレイアダプタ
406 接触キーパッド
500 マイクロ波エミッタに対する部品の近接度を測定するプロセス
502 マイクロ波信号をマイクロ波エミッタに送信
504 マイクロ波エミッタによってマイクロ波信号から電磁場を生成
506 マイクロ波エミッタへの負荷を発生
508 離調された負荷信号を受信
509 マイクロ波エミッタへの機械部品の近接度を算出
510 信号処理器によって電気出力を生成
512 電気出力を診断システムに送信
514 電気出力を表示器に送信
【特許請求の範囲】
【請求項1】
部品(104)の監視システム(109)であって、
センサアセンブリ(110)を備え、前記センサアセンブリ(110)が、
少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場(209)を発生させるマイクロ波エミッタ(206)を備える少なくとも1つのプローブ(202)であって、前記部品が前記少なくとも1つの電磁場と相互作用すると、前記マイクロ波エミッタに負荷が生じるプローブと、
前記マイクロ波エミッタに結合されたデータコンジット(113、115)であって、前記負荷を表す少なくとも1つの負荷信号が、前記マイクロ波エミッタからこのデータコンジット内に反射されるデータコンジットと、
前記少なくとも1つの負荷信号を受信し、前記部品を監視するのに使用される電気出力を生成するように構成された少なくとも1つの信号処理器(200)と
を備える監視システム(109)。
【請求項2】
前記少なくとも1つの信号処理器(200)が、前記少なくとも1つの負荷信号に基づいて、前記マイクロ波エミッタ(206)への前記部品(104)の近接度を測定するようにさらに構成された請求項1記載の監視システム(109)。
【請求項3】
前記電気出力が、前記部品(104)の近接度測定値に実質的に比例する請求項1記載の監視システム(109)。
【請求項4】
前記少なくとも1つのマイクロ波信号が、前記マイクロ波エミッタ(206)の共振周波数と実質的に等しい請求項1記載の監視システム(109)。
【請求項5】
前記センサアセンブリ(110)に結合された診断システム(112)をさらに備える請求項1記載の監視システム(109)。
【請求項6】
前記診断システム(112)が、前記センサアセンブリ(110)から前記電気出力を受信するように構成された少なくとも1つの監視モジュール(336)を備える請求項5記載の監視システム(109)。
【請求項7】
前記診断システム(112)が、前記少なくとも1つの監視モジュール(336)から少なくとも1つの信号を受信するように構成された少なくとも1つのシステム監視モジュール(338)を備える請求項6記載の監視システム(109)。
【請求項8】
部品(104)の監視システム(109)であって、
センサアセンブリ(110)を備え、前記センサアセンブリ(110)が、
少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場(209)を発生させるマイクロ波エミッタ(206)を備える少なくとも1つのプローブ(202)であって、前記部品が、前記少なくとも1つの電磁場と相互作用すると、前記マイクロ波エミッタに負荷が生じるプローブと、
前記マイクロ波エミッタに結合されたデータコンジット(113、115)であって、前記負荷を表す少なくとも1つの負荷信号が、前記マイクロ波エミッタからこのデータコンジット内に反射されるデータコンジットと、
前記少なくとも1つの負荷信号を受信し、前記部品を監視するのに使用される電気出力を生成するように構成された少なくとも1つの信号処理器(200)とを備え、監視システム(109)がさらに、
前記センサアセンブリに結合された診断システム(112)
を備える監視システム(109)。
【請求項9】
前記少なくとも1つの信号処理器(200)が、前記少なくとも1つの負荷信号に基づいて、前記マイクロ波エミッタ(206)への前記部品(104)の近接度を測定するようにさらに構成された請求項8記載の監視システム(109)。
【請求項10】
前記電気出力が、前記部品(104)の近接度測定値に実質的に比例する請求項8記載の監視システム(109)。
【請求項1】
部品(104)の監視システム(109)であって、
センサアセンブリ(110)を備え、前記センサアセンブリ(110)が、
少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場(209)を発生させるマイクロ波エミッタ(206)を備える少なくとも1つのプローブ(202)であって、前記部品が前記少なくとも1つの電磁場と相互作用すると、前記マイクロ波エミッタに負荷が生じるプローブと、
前記マイクロ波エミッタに結合されたデータコンジット(113、115)であって、前記負荷を表す少なくとも1つの負荷信号が、前記マイクロ波エミッタからこのデータコンジット内に反射されるデータコンジットと、
前記少なくとも1つの負荷信号を受信し、前記部品を監視するのに使用される電気出力を生成するように構成された少なくとも1つの信号処理器(200)と
を備える監視システム(109)。
【請求項2】
前記少なくとも1つの信号処理器(200)が、前記少なくとも1つの負荷信号に基づいて、前記マイクロ波エミッタ(206)への前記部品(104)の近接度を測定するようにさらに構成された請求項1記載の監視システム(109)。
【請求項3】
前記電気出力が、前記部品(104)の近接度測定値に実質的に比例する請求項1記載の監視システム(109)。
【請求項4】
前記少なくとも1つのマイクロ波信号が、前記マイクロ波エミッタ(206)の共振周波数と実質的に等しい請求項1記載の監視システム(109)。
【請求項5】
前記センサアセンブリ(110)に結合された診断システム(112)をさらに備える請求項1記載の監視システム(109)。
【請求項6】
前記診断システム(112)が、前記センサアセンブリ(110)から前記電気出力を受信するように構成された少なくとも1つの監視モジュール(336)を備える請求項5記載の監視システム(109)。
【請求項7】
前記診断システム(112)が、前記少なくとも1つの監視モジュール(336)から少なくとも1つの信号を受信するように構成された少なくとも1つのシステム監視モジュール(338)を備える請求項6記載の監視システム(109)。
【請求項8】
部品(104)の監視システム(109)であって、
センサアセンブリ(110)を備え、前記センサアセンブリ(110)が、
少なくとも1つのマイクロ波信号から、少なくとも1つの電磁場(209)を発生させるマイクロ波エミッタ(206)を備える少なくとも1つのプローブ(202)であって、前記部品が、前記少なくとも1つの電磁場と相互作用すると、前記マイクロ波エミッタに負荷が生じるプローブと、
前記マイクロ波エミッタに結合されたデータコンジット(113、115)であって、前記負荷を表す少なくとも1つの負荷信号が、前記マイクロ波エミッタからこのデータコンジット内に反射されるデータコンジットと、
前記少なくとも1つの負荷信号を受信し、前記部品を監視するのに使用される電気出力を生成するように構成された少なくとも1つの信号処理器(200)とを備え、監視システム(109)がさらに、
前記センサアセンブリに結合された診断システム(112)
を備える監視システム(109)。
【請求項9】
前記少なくとも1つの信号処理器(200)が、前記少なくとも1つの負荷信号に基づいて、前記マイクロ波エミッタ(206)への前記部品(104)の近接度を測定するようにさらに構成された請求項8記載の監視システム(109)。
【請求項10】
前記電気出力が、前記部品(104)の近接度測定値に実質的に比例する請求項8記載の監視システム(109)。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−145564(P2012−145564A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−251177(P2011−251177)
【出願日】平成23年11月17日(2011.11.17)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−251177(P2011−251177)
【出願日】平成23年11月17日(2011.11.17)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]