
マスキング治具を用いたマスキング装置
【課題】あらゆるワークに対してマスキング作業を容易に行う。
【解決手段】マスキング装置(10)は、対象物の位置を検出する第一検出部(21)と、対象物を把持する対象物把持部(22)と、接着剤を塗布する塗布部(31)と、対象物のマスキング部位に貼付けられるべきマスキング治具を把持するマスキング治具把持部(32)と、マスキング治具把持部によって把持されたマスキング治具の位置を検出する第二検出部(41)と、ロボット(20、30)とを含み、ロボットは、第一検出部により検出された対象物の位置情報に基づいて対象物把持部が対象物を把持すると共に対象物を所定位置に設置する第一搬送作業と、塗布部が対象物のマスキング部位に接着剤を塗布する塗布作業と、第二検出部により検出されたマスキング治具の位置情報に基づいてマスキング治具把持部がマスキング治具を対象物のマスキング部位に貼付ける第二搬送作業とを行う。
【解決手段】マスキング装置(10)は、対象物の位置を検出する第一検出部(21)と、対象物を把持する対象物把持部(22)と、接着剤を塗布する塗布部(31)と、対象物のマスキング部位に貼付けられるべきマスキング治具を把持するマスキング治具把持部(32)と、マスキング治具把持部によって把持されたマスキング治具の位置を検出する第二検出部(41)と、ロボット(20、30)とを含み、ロボットは、第一検出部により検出された対象物の位置情報に基づいて対象物把持部が対象物を把持すると共に対象物を所定位置に設置する第一搬送作業と、塗布部が対象物のマスキング部位に接着剤を塗布する塗布作業と、第二検出部により検出されたマスキング治具の位置情報に基づいてマスキング治具把持部がマスキング治具を対象物のマスキング部位に貼付ける第二搬送作業とを行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、塗装時に非塗装部位を得るための事前のマスキング作業を行うマスキング装置に関する。
【背景技術】
【0002】
塗装作業において塗装を望まない箇所が存在する場合には、その箇所にマスキングテープを貼付けることが行われている。あるいは、そのような箇所をマスキングシートで被覆して、マスキングシートの端面にマスキングテープを貼付ける場合もある。
【0003】
また、特許文献1においては、被塗装物の一面にマスク部材を配置し、他面に磁石を配置して、マスキング部材を固定することが行われている。この手法では、塗装時にマスキング部材がずれることがなく、またマスク材の着脱も容易に行うことができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−99118号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、マスキングテープのみを用いる場合およびマスキングシートをマスキングテープで貼付ける場合には、所望の形状にマスキングすることが煩雑であり、作業者の熟練度が必要となる。このことは、ポリエチレンやポリウレタン樹脂などからなるマスキング材を用いる場合も同様である。
【0006】
また、ワークと一緒にマスキング部材も塗布する場合には、ワークの形状を正確になぞることが困難であり、塗装品質の低下の要因になりうる。また、特許文献1のようにマグネットによってマスキング部材を固定する手法は、ワークの材質や形状によっては適用できない場合があり、汎用性に欠けていた。
【0007】
本発明はこのような事情に鑑みてなされたものであり、作業者の熟練度を必要とすることなしに、あらゆるワークに対してマスキング作業を容易に行うことを提供することを目的とする。
【課題を解決するための手段】
【0008】
前述した目的を達成するために1番目の発明によれば、対象物の位置を検出する第一の検出部と、該対象物を把持する対象物把持部と、接着剤を塗布する塗布部と、前記対象物のマスキング部位に貼付けられるべきマスキング治具を把持するマスキング治具把持部と、該マスキング治具把持部によって把持された該マスキング治具の位置を検出する第二の検出部と、ロボットとを具備し、該ロボットは、前記第一の検出部により検出された前記対象物の位置情報に基づいて前記対象物把持部が前記対象物を把持すると共に対象物を所定位置に設置する第一の搬送作業と、前記塗布部が接着剤を前記所定位置に設置された対象物のマスキング部位に塗布する塗布作業と、前記第二の検出部により検出された前記マスキング治具の位置情報に基づいて前記マスキング治具把持部が前記マスキング治具を前記対象物のマスキング部位に貼付ける第二の搬送作業と、を行うようにしたマスキング装置が提供される。
【0009】
2番目の発明によれば、1番目の発明において、前記接着剤が水溶性であって水分の減少によって粘性が増加する性質を有しており、前記マスキング治具が吸水性の材料を含む。
3番目の発明によれば、1番目または2番目の発明において、前記マスキング治具が段ボール紙である。
4番目の発明によれば、1番目から3番目のいずれかの発明において、前記接着剤が天然ゴムラテックスを主成分とする材料である。
5番目の発明によれば、1番目から4番目のいずれかの発明において、前記第一の搬送作業、前記第二の搬送作業および前記塗装作業のうちの少なくとも二つが異なるロボットにより実行される。
【発明の効果】
【0010】
1番目の発明においては、第一の搬送作業、第二の搬送作業および塗装作業をロボットが行っているので、作業者の熟練度を必要とすることなしに、マスキング治具を対象物に高精度で貼付けることができる。さらに、接着剤を用いてマスキング治具を貼付けているので、対象物の材料や形状に依存することなしに、あらゆる対象物に対してマスキング治具を容易に取付けられ、高品質な塗装を実現することができる。さらに、マスキング作業に要する時間を、作業者がマスキングテープを用いて行った場合と比較して、大幅に短縮でき、従って、生産能力を向上させられる。
2番目の発明においては、接着性を容易に高めることができる。
3番目の発明においては、高価なマスキングテープ等を使用する場合と比較して、マスキング作業を安価で行うことができる。
4番目の発明においては、接着剤の廃棄時に環境に与える負荷を抑えることができる。
5番目の発明においては、複数のロボットを使用することにより、作業に要する時間をさらに短縮させられる。
【図面の簡単な説明】
【0011】
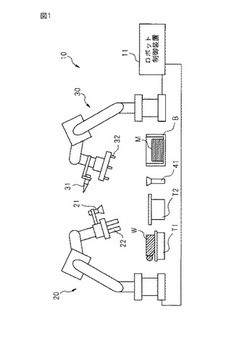
【図1】本発明に基づくマスキング装置の略図である。
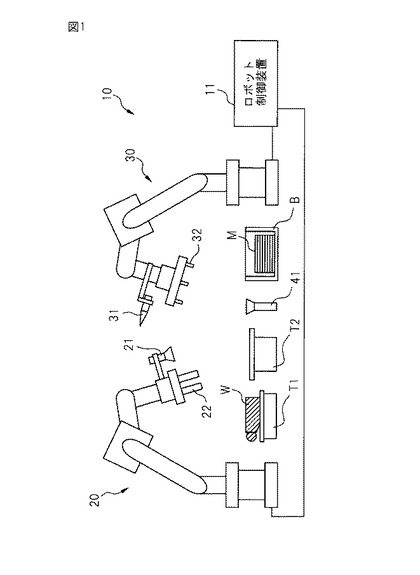
【図2】図1に示されるマスキング装置の動作を示すフローチャートである。
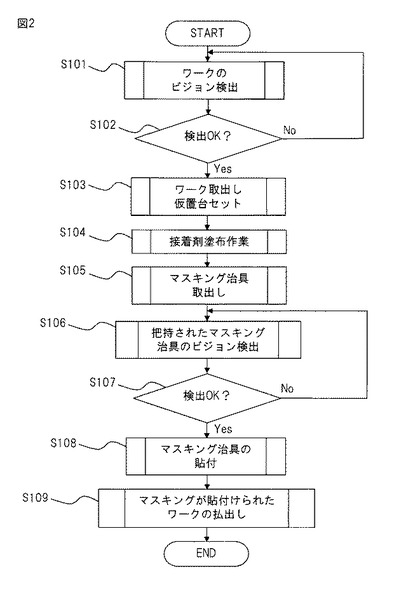
【図3】(a)マスキング装置の動作を説明するための第一の図である。(b)マスキング装置の動作を説明するための第二の図である。
【図4】(a)マスキング装置の動作を説明するための第三の図である。(b)マスキング装置の動作を説明するための第四の図である。
【図5】(a)マスキング装置の動作を説明するための第五の図である。(b)マスキング装置の動作を説明するための第六の図である。
【図6】(a)マスキング装置の動作を説明するための第七の図である。(b)マスキング装置の動作を説明するための第八の図である。
【図7】(a)他の実施形態におけるマスキング装置の動作を説明するための第一の図である。(b)さらに他の実施形態におけるマスキング装置の動作を説明するための第二の図である。
【図8】別の実施形態におけるマスキング装置の動作を説明するための第三の図である。
【発明を実施するための形態】
【0012】
以下、添付図面を参照して本発明の実施形態を説明する。以下の図面において同様の部材には同様の参照符号が付けられている。理解を容易にするために、これら図面は縮尺を適宜変更している。
図1は本発明に基づくマスキング装置の略図である。図1に示される実施形態においては、マスキング装置10は、六自由度の多関節型ロボットである第一ロボット20と第二ロボット30とを含んでいる。これら第一ロボット20および第二ロボット30はロボット制御装置11に接続されている。ロボット制御装置11はデジタルコンピュータであり、第一ロボット20および第二ロボット30の動作全体を制御すると共に、後述する各種の演算処理を行うものとする。
【0013】
図1に示されるように、第一ロボット20のアーム先端部近傍には、ワークWの位置情報を検出する第一ビジョンセンサ21が取付けられている。また、第一ロボット20のアーム先端部には、ワークWを把持するハンド22が備えられている。これに対し、第二ロボット30の先端部近傍には、図示しない接着剤源からの接着剤を塗布する塗布部31が取付けられている。さらに、第二ロボット30のアーム先端部には、マスキング治具Mを吸着把持する吸着部32が備えられている。吸着部32の吸着作用は、吸着部32に接続された真空源(図示しない)により行われる。
【0014】
ここで、塗布部31から塗布される接着剤は水溶性であって水分の減少によって粘性が増加する性質を有するのが好ましい。その理由は、後述するマスキング治具Mが吸水性の材料を含む場合には、接着剤の接着性を高められるためである。あるいは、塗布部31から塗布される接着剤は天然ゴムラテックスを主成分とする材料であってもよい。この場合には、接着剤を単独でまたはマスキング治具Mと一緒に容易に廃棄できるのが明らかであろう。
【0015】
また、図1から分かるように、テーブルT1の上にはワークWが載置されている。ここで、ワークWは、例えば図示しないロボットを構成するアームのフレームであり、他の種類のワークWであってもよい。また、収容箱Bには多数のマスキング治具Mが収容されている。これらマスキング治具Mは互いに同一形状の板状部材、例えば同一形状の段ボールであり、互いに重ねられて収容箱B内に収容されている。
【0016】
さらに、ワークWを一時的に載置するための仮置き台T2も図示されている。そして、仮置き台T2近傍には、作業場の床に固定されていて第一ビジョンセンサ21と同様な機能を有する第二ビジョンセンサ41が設置されている。これらテーブルT1、仮置き台T2、第二ビジョンセンサ41および収容箱Bは第一ロボット20および第二ロボット30の動作範囲内に位置している。また、これらテーブルT1、仮置き台T2、第二ビジョンセンサ41および収容箱Bの位置関係および寸法はロボット制御装置11の記憶部(図示しない)に記憶されているものとする。
【0017】
図2は図1に示されるマスキング装置の動作を示すフローチャートである。また、図3(a)〜図6(b)は、それぞれマスキング装置の動作を説明するための図である。以下、これら図面を参照しつつ、本発明のマスキング装置10の動作について説明する。
【0018】
なお、本発明において第一ロボット20および第二ロボット30により実施されるマスキング装置10の動作は、ワークを取出して所定位置まで搬送する第一の搬送作業と、ワークに接着剤を塗布する塗布作業と、マスキング治具を取出してワークに貼付ける第二の搬送作業と、を含んでいる。そして、これらの作業が終了すると、マスキング治具が取付けられたワークがマスキング装置から搬出されて、塗装装置により別途、塗装される。
【0019】
図2のステップS101においては、ワークWを第一ビジョンセンサ21で検出する。図3(a)に示されるように、第一ロボット20をテーブルT1上に移動させて、第一ロボット20の第一ビジョンセンサ21でワークWを撮像する。そして、ロボット制御装置11がワークWの画像に基づいてワークWの位置、姿勢を算出すると、ワークWの検出が終了したと判定される(ステップS102)。
【0020】
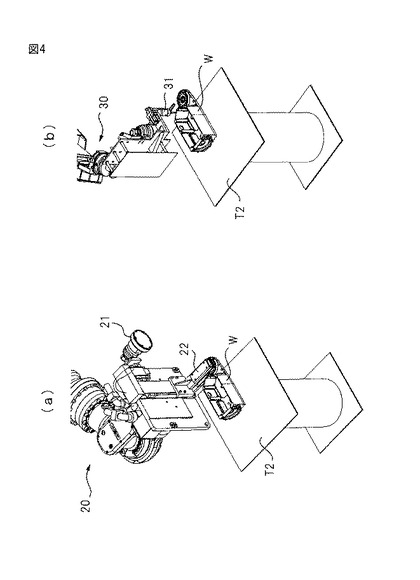
次いで、第一ロボット20のハンド22がワークWを把持するのに適した位置になるまで、ワークWの位置、姿勢に基づいて第一ロボット20を移動させる。次いで、図3(b)に示されるように、第一ロボット20のハンド22にワークWを把持させて、第一ロボット20がワークWを仮置き台T2まで搬送する。次いで、図4(a)に示されるように第一ロボット20がワークWを仮置き台T2上にセットする(ステップS103)。そして、ハンド22を解放した後で、第一ロボット20を初期位置まで後退させる。以下、ワークWをテーブルT1から仮置き台T2まで搬送してセットする作業を第一の搬送作業と呼ぶ。
【0021】
テーブルT1と仮置き台T2との間の位置関係およびワークWの形状、寸法は既に分かっているので、第一ロボット20の初期位置からの移動距離に基づいて、仮置き台T2上におけるワークWの位置、姿勢が算出される。次いで、第二ロボット30を仮置き台T2上まで移動させる。そして、ステップS104および図4(b)に示されるように、第二ロボット30の塗布部31を起動して、接着剤をワークWの所望の部位に所望量だけ塗布する(以下、単に「塗布作業」と呼ぶ)。
【0022】
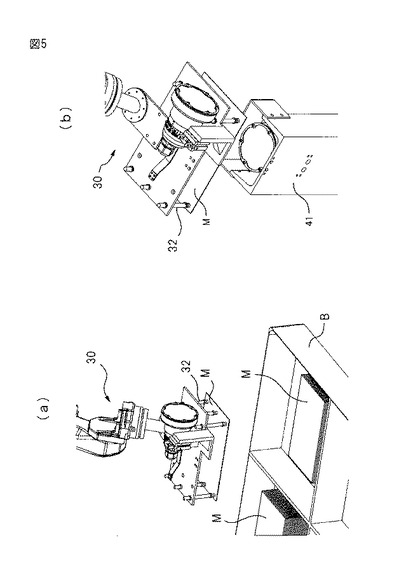
塗布作業が終了すると、第二ロボット30を仮置き台T2から収容箱Bまで移動させる。収容箱B内には、複数のマスキング治具Mが互いに積重ねて配置されている。ステップS105および図5(a)においては、第二ロボット30の吸着部32が起動して、収容箱Bから一つのマスキング治具Mを吸着把持する。
【0023】
次いで、第二ロボット30は吸着把持したマスキング治具Mを第二ビジョンセンサ41まで移動させる。そして、ステップS106および図5(b)に示されるように、第二ビジョンセンサ41が、第二ロボット30の吸着部32により吸着されたワークWを撮像する。これにより、ロボット制御装置11がワークWの画像に基づいてワークWの位置、姿勢を算出する。そして、ワークWの位置、姿勢が算出されると、ワークWの検出が終了したと判定される(ステップS107)。
【0024】
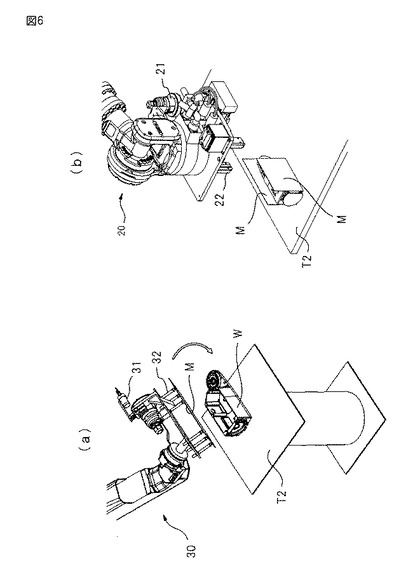
次いで、ステップS108および図6(a)に示されるように、第二ロボット30が仮置き台T2上まで移動される。そして、仮置き台T2におけるワークWの位置、姿勢およびマスキング治具Mの位置、姿勢に基づいて、第二ロボット30は、接着剤が塗布されたワークWの部位にマスキング治具Mを貼付ける。本発明においては、接着剤を用いてマスキング治具MをワークWに貼付けているので、ワークWの材料や形状に関わりなく、あらゆるワークWに対してマスキング治具Mを容易に取付けることができる。
【0025】
その後、第二ロボット30をその初期位置まで後退させると共に、第一ロボット20を仮置き台T2上まで移動させる。そして、第一ロボット20のハンド22は、マスキング治具Mが貼付けられたワークWを把持して、仮置き台T2から搬出する。マスキング治具MによってワークWは非塗装部位を備えるようになる。従って、後工程の塗装工程においては、非塗装部位以外の箇所についてワークWを塗装することができる。
【0026】
このように、本発明においては、第一の搬送作業、第二の搬送作業および塗装作業を第一ロボット20および第二ロボット30が行っている。従って、作業者の熟練度を必要とすることなしに、マスキング治具Mを対象物Wに高精度で貼付けることができる。さらに、本発明においては、マスキング作業に要する時間を、作業者がマスキングテープを用いて行った場合と比較して、大幅に短縮でき、従って、生産能力を向上させることも可能である。また、マスキング治具M、例えば段ボールは安価であるので、高価なマスキングテープ等を使用する場合と比較して、マスキング作業を安価で行えることも分かるであろう。
【0027】
なお、図2から図6(b)を参照して説明した実施形態においては第一ロボット20および第二ロボット30を使用している。しかしながら、単一のロボットが第一および第二の搬送作業ならびに塗布作業を行うようにしてもよく、この場合には、マスキング装置10に必要とされるスペースを小さくすることができる。また、第一および第二の搬送作業ならびに塗布作業がそれぞれ別の三つのロボットによって行われるようにしてもよい。この場合には、マスキング作業に要する時間をさらに短くできるのが分かるであろう。
【0028】
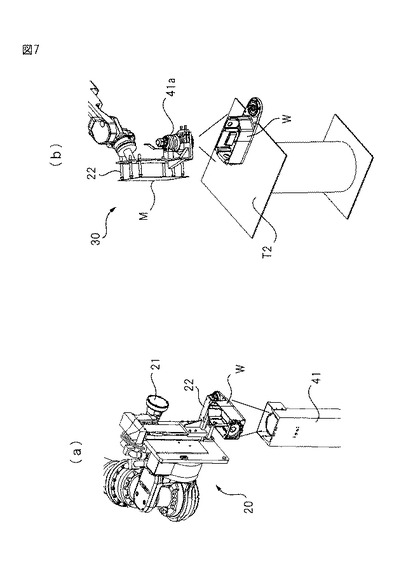
ところで、図7(a)は他の実施形態におけるマスキング装置の動作を説明するための図である。図7(a)においては、第一ロボット20のハンド22により把持されたワークWを第二ビジョンセンサ41が撮像している。この工程は、図2に示されるステップS102とステップS103との間に行うのが好ましい。これにより、ハンド22により実際に把持されたワークWの位置、姿勢を算出できるので、ワークWを仮置き台T2上に載置する際に、ワークWの位置決め精度をさらに向上させられる。
【0029】
また、図7(b)はさらに他の実施形態におけるマスキング装置の動作を説明するための図である。図7(b)においては、第二ロボット30が追加ビジョンセンサ41aを備えている。図2に示されるステップS103とステップS104との間において、追加ビジョンセンサ41aが仮置き台T2上に載置されたワークWを撮像する。これにより、仮置き台T2上に載置されたワークWの位置、姿勢を算出できるので、ワークWに接着剤を塗布する塗布作業をさらに高精度で行える。
【0030】
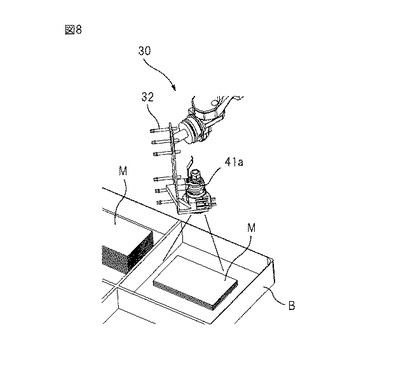
さらに、図8は別の実施形態におけるマスキング装置の動作を説明するための図である。図8においても、第二ロボット30が追加ビジョンセンサ41aを備えており、図2に示されるステップS104とステップS105との間において追加ビジョンセンサ41aが収容箱B内のマスキング治具Mを撮像する。これにより、マスキング治具Mを収容箱Bから高精度で取出すことが可能となる。このことは、収容箱B内のマスキング治具Mの位置にバラツキがある場合に特に有利であるのが分かるであろう。
【符号の説明】
【0031】
10 マスキング装置
20 第一ロボット
21 第一ビジョンセンサ(第一の検出部)
22 ハンド(対象物把持部)
30 第二ロボット
31 塗布部
32 吸着部(マスキング治具把持部)
41 第二ビジョンセンサ(第二の検出部)
41a 追加ビジョンセンサ
B 収容箱
M マスキング治具
T1 テーブル
T2 仮置き台
W ワーク(対象物)
【技術分野】
【0001】
本発明は、塗装時に非塗装部位を得るための事前のマスキング作業を行うマスキング装置に関する。
【背景技術】
【0002】
塗装作業において塗装を望まない箇所が存在する場合には、その箇所にマスキングテープを貼付けることが行われている。あるいは、そのような箇所をマスキングシートで被覆して、マスキングシートの端面にマスキングテープを貼付ける場合もある。
【0003】
また、特許文献1においては、被塗装物の一面にマスク部材を配置し、他面に磁石を配置して、マスキング部材を固定することが行われている。この手法では、塗装時にマスキング部材がずれることがなく、またマスク材の着脱も容易に行うことができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平6−99118号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、マスキングテープのみを用いる場合およびマスキングシートをマスキングテープで貼付ける場合には、所望の形状にマスキングすることが煩雑であり、作業者の熟練度が必要となる。このことは、ポリエチレンやポリウレタン樹脂などからなるマスキング材を用いる場合も同様である。
【0006】
また、ワークと一緒にマスキング部材も塗布する場合には、ワークの形状を正確になぞることが困難であり、塗装品質の低下の要因になりうる。また、特許文献1のようにマグネットによってマスキング部材を固定する手法は、ワークの材質や形状によっては適用できない場合があり、汎用性に欠けていた。
【0007】
本発明はこのような事情に鑑みてなされたものであり、作業者の熟練度を必要とすることなしに、あらゆるワークに対してマスキング作業を容易に行うことを提供することを目的とする。
【課題を解決するための手段】
【0008】
前述した目的を達成するために1番目の発明によれば、対象物の位置を検出する第一の検出部と、該対象物を把持する対象物把持部と、接着剤を塗布する塗布部と、前記対象物のマスキング部位に貼付けられるべきマスキング治具を把持するマスキング治具把持部と、該マスキング治具把持部によって把持された該マスキング治具の位置を検出する第二の検出部と、ロボットとを具備し、該ロボットは、前記第一の検出部により検出された前記対象物の位置情報に基づいて前記対象物把持部が前記対象物を把持すると共に対象物を所定位置に設置する第一の搬送作業と、前記塗布部が接着剤を前記所定位置に設置された対象物のマスキング部位に塗布する塗布作業と、前記第二の検出部により検出された前記マスキング治具の位置情報に基づいて前記マスキング治具把持部が前記マスキング治具を前記対象物のマスキング部位に貼付ける第二の搬送作業と、を行うようにしたマスキング装置が提供される。
【0009】
2番目の発明によれば、1番目の発明において、前記接着剤が水溶性であって水分の減少によって粘性が増加する性質を有しており、前記マスキング治具が吸水性の材料を含む。
3番目の発明によれば、1番目または2番目の発明において、前記マスキング治具が段ボール紙である。
4番目の発明によれば、1番目から3番目のいずれかの発明において、前記接着剤が天然ゴムラテックスを主成分とする材料である。
5番目の発明によれば、1番目から4番目のいずれかの発明において、前記第一の搬送作業、前記第二の搬送作業および前記塗装作業のうちの少なくとも二つが異なるロボットにより実行される。
【発明の効果】
【0010】
1番目の発明においては、第一の搬送作業、第二の搬送作業および塗装作業をロボットが行っているので、作業者の熟練度を必要とすることなしに、マスキング治具を対象物に高精度で貼付けることができる。さらに、接着剤を用いてマスキング治具を貼付けているので、対象物の材料や形状に依存することなしに、あらゆる対象物に対してマスキング治具を容易に取付けられ、高品質な塗装を実現することができる。さらに、マスキング作業に要する時間を、作業者がマスキングテープを用いて行った場合と比較して、大幅に短縮でき、従って、生産能力を向上させられる。
2番目の発明においては、接着性を容易に高めることができる。
3番目の発明においては、高価なマスキングテープ等を使用する場合と比較して、マスキング作業を安価で行うことができる。
4番目の発明においては、接着剤の廃棄時に環境に与える負荷を抑えることができる。
5番目の発明においては、複数のロボットを使用することにより、作業に要する時間をさらに短縮させられる。
【図面の簡単な説明】
【0011】
【図1】本発明に基づくマスキング装置の略図である。
【図2】図1に示されるマスキング装置の動作を示すフローチャートである。
【図3】(a)マスキング装置の動作を説明するための第一の図である。(b)マスキング装置の動作を説明するための第二の図である。
【図4】(a)マスキング装置の動作を説明するための第三の図である。(b)マスキング装置の動作を説明するための第四の図である。
【図5】(a)マスキング装置の動作を説明するための第五の図である。(b)マスキング装置の動作を説明するための第六の図である。
【図6】(a)マスキング装置の動作を説明するための第七の図である。(b)マスキング装置の動作を説明するための第八の図である。
【図7】(a)他の実施形態におけるマスキング装置の動作を説明するための第一の図である。(b)さらに他の実施形態におけるマスキング装置の動作を説明するための第二の図である。
【図8】別の実施形態におけるマスキング装置の動作を説明するための第三の図である。
【発明を実施するための形態】
【0012】
以下、添付図面を参照して本発明の実施形態を説明する。以下の図面において同様の部材には同様の参照符号が付けられている。理解を容易にするために、これら図面は縮尺を適宜変更している。
図1は本発明に基づくマスキング装置の略図である。図1に示される実施形態においては、マスキング装置10は、六自由度の多関節型ロボットである第一ロボット20と第二ロボット30とを含んでいる。これら第一ロボット20および第二ロボット30はロボット制御装置11に接続されている。ロボット制御装置11はデジタルコンピュータであり、第一ロボット20および第二ロボット30の動作全体を制御すると共に、後述する各種の演算処理を行うものとする。
【0013】
図1に示されるように、第一ロボット20のアーム先端部近傍には、ワークWの位置情報を検出する第一ビジョンセンサ21が取付けられている。また、第一ロボット20のアーム先端部には、ワークWを把持するハンド22が備えられている。これに対し、第二ロボット30の先端部近傍には、図示しない接着剤源からの接着剤を塗布する塗布部31が取付けられている。さらに、第二ロボット30のアーム先端部には、マスキング治具Mを吸着把持する吸着部32が備えられている。吸着部32の吸着作用は、吸着部32に接続された真空源(図示しない)により行われる。
【0014】
ここで、塗布部31から塗布される接着剤は水溶性であって水分の減少によって粘性が増加する性質を有するのが好ましい。その理由は、後述するマスキング治具Mが吸水性の材料を含む場合には、接着剤の接着性を高められるためである。あるいは、塗布部31から塗布される接着剤は天然ゴムラテックスを主成分とする材料であってもよい。この場合には、接着剤を単独でまたはマスキング治具Mと一緒に容易に廃棄できるのが明らかであろう。
【0015】
また、図1から分かるように、テーブルT1の上にはワークWが載置されている。ここで、ワークWは、例えば図示しないロボットを構成するアームのフレームであり、他の種類のワークWであってもよい。また、収容箱Bには多数のマスキング治具Mが収容されている。これらマスキング治具Mは互いに同一形状の板状部材、例えば同一形状の段ボールであり、互いに重ねられて収容箱B内に収容されている。
【0016】
さらに、ワークWを一時的に載置するための仮置き台T2も図示されている。そして、仮置き台T2近傍には、作業場の床に固定されていて第一ビジョンセンサ21と同様な機能を有する第二ビジョンセンサ41が設置されている。これらテーブルT1、仮置き台T2、第二ビジョンセンサ41および収容箱Bは第一ロボット20および第二ロボット30の動作範囲内に位置している。また、これらテーブルT1、仮置き台T2、第二ビジョンセンサ41および収容箱Bの位置関係および寸法はロボット制御装置11の記憶部(図示しない)に記憶されているものとする。
【0017】
図2は図1に示されるマスキング装置の動作を示すフローチャートである。また、図3(a)〜図6(b)は、それぞれマスキング装置の動作を説明するための図である。以下、これら図面を参照しつつ、本発明のマスキング装置10の動作について説明する。
【0018】
なお、本発明において第一ロボット20および第二ロボット30により実施されるマスキング装置10の動作は、ワークを取出して所定位置まで搬送する第一の搬送作業と、ワークに接着剤を塗布する塗布作業と、マスキング治具を取出してワークに貼付ける第二の搬送作業と、を含んでいる。そして、これらの作業が終了すると、マスキング治具が取付けられたワークがマスキング装置から搬出されて、塗装装置により別途、塗装される。
【0019】
図2のステップS101においては、ワークWを第一ビジョンセンサ21で検出する。図3(a)に示されるように、第一ロボット20をテーブルT1上に移動させて、第一ロボット20の第一ビジョンセンサ21でワークWを撮像する。そして、ロボット制御装置11がワークWの画像に基づいてワークWの位置、姿勢を算出すると、ワークWの検出が終了したと判定される(ステップS102)。
【0020】
次いで、第一ロボット20のハンド22がワークWを把持するのに適した位置になるまで、ワークWの位置、姿勢に基づいて第一ロボット20を移動させる。次いで、図3(b)に示されるように、第一ロボット20のハンド22にワークWを把持させて、第一ロボット20がワークWを仮置き台T2まで搬送する。次いで、図4(a)に示されるように第一ロボット20がワークWを仮置き台T2上にセットする(ステップS103)。そして、ハンド22を解放した後で、第一ロボット20を初期位置まで後退させる。以下、ワークWをテーブルT1から仮置き台T2まで搬送してセットする作業を第一の搬送作業と呼ぶ。
【0021】
テーブルT1と仮置き台T2との間の位置関係およびワークWの形状、寸法は既に分かっているので、第一ロボット20の初期位置からの移動距離に基づいて、仮置き台T2上におけるワークWの位置、姿勢が算出される。次いで、第二ロボット30を仮置き台T2上まで移動させる。そして、ステップS104および図4(b)に示されるように、第二ロボット30の塗布部31を起動して、接着剤をワークWの所望の部位に所望量だけ塗布する(以下、単に「塗布作業」と呼ぶ)。
【0022】
塗布作業が終了すると、第二ロボット30を仮置き台T2から収容箱Bまで移動させる。収容箱B内には、複数のマスキング治具Mが互いに積重ねて配置されている。ステップS105および図5(a)においては、第二ロボット30の吸着部32が起動して、収容箱Bから一つのマスキング治具Mを吸着把持する。
【0023】
次いで、第二ロボット30は吸着把持したマスキング治具Mを第二ビジョンセンサ41まで移動させる。そして、ステップS106および図5(b)に示されるように、第二ビジョンセンサ41が、第二ロボット30の吸着部32により吸着されたワークWを撮像する。これにより、ロボット制御装置11がワークWの画像に基づいてワークWの位置、姿勢を算出する。そして、ワークWの位置、姿勢が算出されると、ワークWの検出が終了したと判定される(ステップS107)。
【0024】
次いで、ステップS108および図6(a)に示されるように、第二ロボット30が仮置き台T2上まで移動される。そして、仮置き台T2におけるワークWの位置、姿勢およびマスキング治具Mの位置、姿勢に基づいて、第二ロボット30は、接着剤が塗布されたワークWの部位にマスキング治具Mを貼付ける。本発明においては、接着剤を用いてマスキング治具MをワークWに貼付けているので、ワークWの材料や形状に関わりなく、あらゆるワークWに対してマスキング治具Mを容易に取付けることができる。
【0025】
その後、第二ロボット30をその初期位置まで後退させると共に、第一ロボット20を仮置き台T2上まで移動させる。そして、第一ロボット20のハンド22は、マスキング治具Mが貼付けられたワークWを把持して、仮置き台T2から搬出する。マスキング治具MによってワークWは非塗装部位を備えるようになる。従って、後工程の塗装工程においては、非塗装部位以外の箇所についてワークWを塗装することができる。
【0026】
このように、本発明においては、第一の搬送作業、第二の搬送作業および塗装作業を第一ロボット20および第二ロボット30が行っている。従って、作業者の熟練度を必要とすることなしに、マスキング治具Mを対象物Wに高精度で貼付けることができる。さらに、本発明においては、マスキング作業に要する時間を、作業者がマスキングテープを用いて行った場合と比較して、大幅に短縮でき、従って、生産能力を向上させることも可能である。また、マスキング治具M、例えば段ボールは安価であるので、高価なマスキングテープ等を使用する場合と比較して、マスキング作業を安価で行えることも分かるであろう。
【0027】
なお、図2から図6(b)を参照して説明した実施形態においては第一ロボット20および第二ロボット30を使用している。しかしながら、単一のロボットが第一および第二の搬送作業ならびに塗布作業を行うようにしてもよく、この場合には、マスキング装置10に必要とされるスペースを小さくすることができる。また、第一および第二の搬送作業ならびに塗布作業がそれぞれ別の三つのロボットによって行われるようにしてもよい。この場合には、マスキング作業に要する時間をさらに短くできるのが分かるであろう。
【0028】
ところで、図7(a)は他の実施形態におけるマスキング装置の動作を説明するための図である。図7(a)においては、第一ロボット20のハンド22により把持されたワークWを第二ビジョンセンサ41が撮像している。この工程は、図2に示されるステップS102とステップS103との間に行うのが好ましい。これにより、ハンド22により実際に把持されたワークWの位置、姿勢を算出できるので、ワークWを仮置き台T2上に載置する際に、ワークWの位置決め精度をさらに向上させられる。
【0029】
また、図7(b)はさらに他の実施形態におけるマスキング装置の動作を説明するための図である。図7(b)においては、第二ロボット30が追加ビジョンセンサ41aを備えている。図2に示されるステップS103とステップS104との間において、追加ビジョンセンサ41aが仮置き台T2上に載置されたワークWを撮像する。これにより、仮置き台T2上に載置されたワークWの位置、姿勢を算出できるので、ワークWに接着剤を塗布する塗布作業をさらに高精度で行える。
【0030】
さらに、図8は別の実施形態におけるマスキング装置の動作を説明するための図である。図8においても、第二ロボット30が追加ビジョンセンサ41aを備えており、図2に示されるステップS104とステップS105との間において追加ビジョンセンサ41aが収容箱B内のマスキング治具Mを撮像する。これにより、マスキング治具Mを収容箱Bから高精度で取出すことが可能となる。このことは、収容箱B内のマスキング治具Mの位置にバラツキがある場合に特に有利であるのが分かるであろう。
【符号の説明】
【0031】
10 マスキング装置
20 第一ロボット
21 第一ビジョンセンサ(第一の検出部)
22 ハンド(対象物把持部)
30 第二ロボット
31 塗布部
32 吸着部(マスキング治具把持部)
41 第二ビジョンセンサ(第二の検出部)
41a 追加ビジョンセンサ
B 収容箱
M マスキング治具
T1 テーブル
T2 仮置き台
W ワーク(対象物)
【特許請求の範囲】
【請求項1】
対象物の位置を検出する第一の検出部と、
該対象物を把持する対象物把持部と、
接着剤を塗布する塗布部と、
前記対象物のマスキング部位に貼付けられるべきマスキング治具を把持するマスキング治具把持部と、
該マスキング治具把持部によって把持された該マスキング治具の位置を検出する第二の検出部と、
ロボットとを具備し、
該ロボットは、前記第一の検出部により検出された前記対象物の位置情報に基づいて前記対象物把持部が前記対象物を把持すると共に対象物を所定位置に設置する第一の搬送作業と、前記塗布部が接着剤を前記所定位置に設置された対象物のマスキング部位に塗布する塗布作業と、前記第二の検出部により検出された前記マスキング治具の位置情報に基づいて前記マスキング治具把持部が前記マスキング治具を前記対象物のマスキング部位に貼付ける第二の搬送作業と、を行うようにしたマスキング装置。
【請求項2】
前記接着剤が水溶性であって水分の減少によって粘性が増加する性質を有しており、前記マスキング治具が吸水性の材料を含むことを特徴とする請求項1のマスキング装置。
【請求項3】
前記マスキング治具が段ボール紙である請求項1又は2に記載のマスキング装置。
【請求項4】
前記接着剤が天然ゴムラテックスを主成分とする材料であることを特徴とする請求項1から3の内、いずれか一項に記載のマスキング装置。
【請求項5】
前記第一の搬送作業、前記第二の搬送作業および前記塗装作業のうちの少なくとも二つが異なるロボットにより実行される請求項1から4の内、いずれか一項に記載の記載のマスキング装置。
【請求項1】
対象物の位置を検出する第一の検出部と、
該対象物を把持する対象物把持部と、
接着剤を塗布する塗布部と、
前記対象物のマスキング部位に貼付けられるべきマスキング治具を把持するマスキング治具把持部と、
該マスキング治具把持部によって把持された該マスキング治具の位置を検出する第二の検出部と、
ロボットとを具備し、
該ロボットは、前記第一の検出部により検出された前記対象物の位置情報に基づいて前記対象物把持部が前記対象物を把持すると共に対象物を所定位置に設置する第一の搬送作業と、前記塗布部が接着剤を前記所定位置に設置された対象物のマスキング部位に塗布する塗布作業と、前記第二の検出部により検出された前記マスキング治具の位置情報に基づいて前記マスキング治具把持部が前記マスキング治具を前記対象物のマスキング部位に貼付ける第二の搬送作業と、を行うようにしたマスキング装置。
【請求項2】
前記接着剤が水溶性であって水分の減少によって粘性が増加する性質を有しており、前記マスキング治具が吸水性の材料を含むことを特徴とする請求項1のマスキング装置。
【請求項3】
前記マスキング治具が段ボール紙である請求項1又は2に記載のマスキング装置。
【請求項4】
前記接着剤が天然ゴムラテックスを主成分とする材料であることを特徴とする請求項1から3の内、いずれか一項に記載のマスキング装置。
【請求項5】
前記第一の搬送作業、前記第二の搬送作業および前記塗装作業のうちの少なくとも二つが異なるロボットにより実行される請求項1から4の内、いずれか一項に記載の記載のマスキング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−161773(P2012−161773A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−26006(P2011−26006)
【出願日】平成23年2月9日(2011.2.9)
【特許番号】特許第4975870号(P4975870)
【特許公報発行日】平成24年7月11日(2012.7.11)
【出願人】(390008235)ファナック株式会社 (1,110)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月9日(2011.2.9)
【特許番号】特許第4975870号(P4975870)
【特許公報発行日】平成24年7月11日(2012.7.11)
【出願人】(390008235)ファナック株式会社 (1,110)
【Fターム(参考)】
[ Back to top ]