
マスフローコントローラ
【課題】マスフローコントローラにおけるPI性能を向上させる。
【解決手段】流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部2と、当該流量センサ部2の上流側又は下流側に設けた流量制御バルブ3と、前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差にPID演算を施して流量制御バルブ3へのフィードバック制御値を算出する算出部7と、前記フィードバック制御値に基づいて開度制御信号を生成し、流量制御バルブに出力する開度制御信号出力部8と、を備え、前記算出部7が、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力又は流量設定値の少なくとも1つと、前記一次側圧力の時間変化量と、に基づいて変更する。
【解決手段】流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部2と、当該流量センサ部2の上流側又は下流側に設けた流量制御バルブ3と、前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差にPID演算を施して流量制御バルブ3へのフィードバック制御値を算出する算出部7と、前記フィードバック制御値に基づいて開度制御信号を生成し、流量制御バルブに出力する開度制御信号出力部8と、を備え、前記算出部7が、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力又は流量設定値の少なくとも1つと、前記一次側圧力の時間変化量と、に基づいて変更する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ガスや液体などの流体の流量を制御するマスフローコントローラに関するものである。
【背景技術】
【0002】
例えば、半導体の製造に用いられる各種ガス等を半導体製造装置に供給する場合、それらの供給流路にマスフローコントローラをそれぞれ設け、これによってガス流量をそれぞれ調節するようにしている。そして従前は、各マスフローコントローラにそれぞれ圧力レギュレータを直列付帯させ、各マスフローコントローラの流路内圧力に極端な変動が生じないようにして、流量制御を容易化している。
【0003】
前記マスフローコントローラにおける流量制御方式としては、PID制御が基本であるが、例えば、特許文献1に示すように、過渡的な応答状態と安定状態とでPID係数を切り替えてフィードバック制御を行うようにしたものが知られている。
【0004】
具体的に特許文献1に示すものは、比例演算における偏差に乗算するゲイン値として、流量設定値を所定の関数に代入して得られる値を用いており、例えば安定状態において用いられる前記所定の関数は、代入される流量設定値が小さくなれば小さな値が算出されるものである。つまり、特許文献1に示す従来のマスフローコントローラは、安定状態での比例係数、積分係数及び微分係数(以下、PID係数ともいう。)を流量設定値のみに比例させて変更するだけである。
【0005】
しかしながら、本願発明者は、安定状態において一次側圧力の上昇時と下降時とでPID係数の最適値が異なること、また、一次側圧力の時間変化量が同じであっても、変化前の一次側圧力が異なればPID係数が異なること、さらに、流量設定値とPID係数最適値とが直線関係にならないという実験結果を得た。そうすると、安定状態においてPID係数を流量設定値に比例させるだけではPI(Pressure Insensitive)性能の向上には限界があることが判明した。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−34550号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
そこで本発明は、上記問題点を一挙に解決するためになされたものであり、マスフローコントローラにおけるPI性能をさらに向上させることをその主たる所期課題とするものである。
【課題を解決するための手段】
【0008】
すなわち本発明に係るマスフローコントローラは、流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部と、当該流量センサ部の上流側又は下流側に設けた流量制御バルブと、前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差にPID演算を施して流量制御バルブへのフィードバック制御値を算出する算出部と、前記フィードバック制御値に基づいて開度制御信号を生成し、流量制御バルブに出力する開度制御信号出力部と、を備え、前記算出部が、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力又は流量設定値の少なくとも1つと、前記一次側圧力の時間変化量と、に基づいて変更することを特徴とする。
【0009】
このようなものであれば、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力、当該一次側圧力の時間変化量、及び前記流量設定値の少なくとも2つに基づいて変更させているので、従来の流量設定値により比例係数、積分係数及び微分係数を比例させて変更させる方法に比べて、より最適な比例係数、積分係数及び微分係数を得ることができ、その結果、一次側圧力の圧力変動の影響を受けにくく、安定した流量制御を行うことができる。
【0010】
特に、安定状態において一次側圧力の上昇時と下降時とで比例係数、積分係数及び微分係数の最適値が異なることから、前記算出部が、一次側圧力の時間変化量の正負によって、比例係数、積分係数及び微分係数を変更するものであることが望ましい。
【0011】
比例係数、積分係数及び微分係数を最も最適な値にして、一次側圧力の圧力変動の影響を受けにくく、安定した流量制御を行うためには、前記算出部が、一次側圧力の時間変化量の正負によって、比例係数、積分係数及び微分係数を変更し、それによって変更された比例係数、積分係数及び微分係数に流量設定値を所定の関数に代入して得られる値を用いて所定演算することにより変更し、それによって変更された比例係数、積分係数及び微分係数に一次側圧力を所定の関数に代入して得られる値を用いて所定演算することにより変更するものであることが望ましい。
【発明の効果】
【0012】
このように構成した本発明によれば、マスフローコントローラにおけるPI性能を向上させることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係るマスフローコントローラの全体模式図。
【図2】同実施形態に係るマスフローコントローラを用いた流量制御システムの構成例。
【図3】同実施形態における制御部の機能ブロック図。
【図4】同実施形態におけるPID係数変更手順を示すフローチャート。
【図5】PID係数変更に用いる関数を示す模式図。
【発明を実施するための形態】
【0014】
以下に本発明に係る質量流量計100の一実施形態について図面を参照して説明する。なお、図1は本実施形態に係るマスフローコントローラの全体模式図であり、図2はマスフローコントローラを用いた流量制御システムの構成例であり、図3は制御部の機能ブロック図であり、図4はPID係数変更手順を示すフローチャートであり、図5はPID係数変更に用いる関数を示す模式図である。
【0015】
<装置構成>
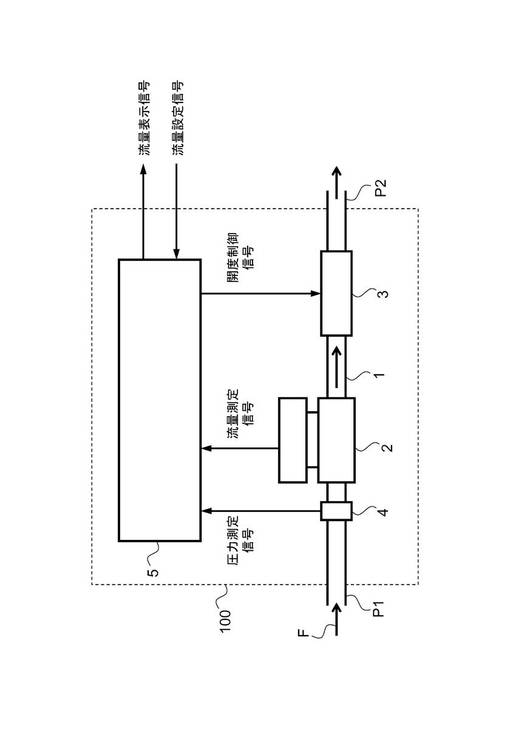
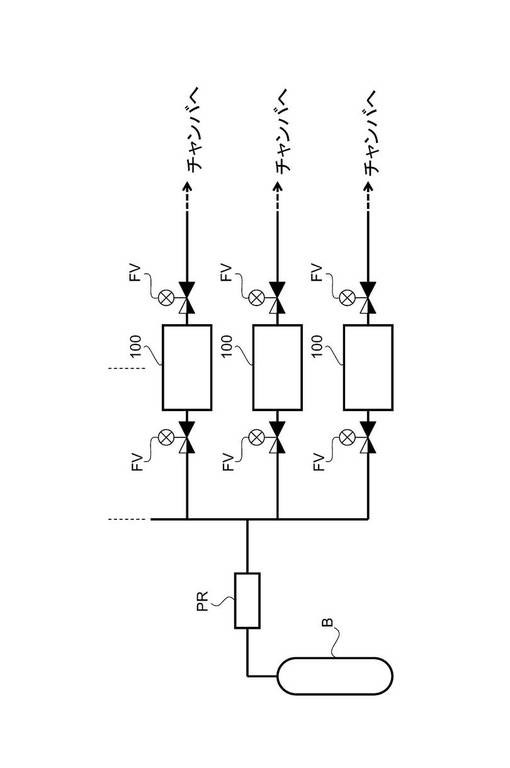
本実施形態のマスフローコントローラ100は、図1に模式図を示すように、内部流路1と、その内部流路1内を流れる流体Fの流量を測定する流量センサ部2と、その流量センサ部2の例えば下流側に設けた流量制御バルブ3と、前記流量センサ部2及び流量制御バルブ3の上流側に設けた圧力センサ部4と、制御部5とを備えているもので、例えば図2に示すように、半導体プロセスにおけるチャンバへのガス供給システムに用いられる。
【0016】
各部を説明すると、内部流路1は、上流端を導入ポートP1、下流端を導出ポートP2としてそれぞれ開口するもので、例えば、導入ポートP1には、外部配管を介してボンベ等の流体供給源Bが接続され、導出ポートP2には、外部配管を介して、半導体製造のためのチャンバ(図示しない)が接続されている。なお、この実施形態では、同図に示すように、1つの流体供給源Bから配管を複数分岐させ、各配管にそれぞれマスフローコントローラ100を設けるようにしている。また、圧力レギュレータPRは、流体供給源Bの出口にのみ設けてあり、各配管それぞれには、マスフローコントローラ100用の圧力レギュレータは設けられていない。なお符号FVは空圧弁である
【0017】
流量センサ部2は、詳細は図示しないが、例えば、流路1に設けられた一対の感熱センサ(サーマルセンサ)を備えたものであって、流体Fの瞬時流量がこの感熱センサによって電気信号として検出され、内部電気回路によってその電気信号が増幅等されて、検出流量に応じた値を有する流量測定信号として出力されるようにしたものである。
【0018】
流量制御バルブ3は、やはり詳細は図示しないが、例えば、その弁開度をピエゾ素子よりなるアクチュエータによって変化させ得るように構成したものであって、外部からの電気信号である開度制御信号を与えられることによって前記アクチュエータを駆動し、その開度制御信号の値に応じた弁開度に調整して流体Fの流量を制御するものである。
【0019】
圧力センサ部4は、詳細は図示しないが、例えば、ダイヤフラム(ステンレスダイヤフラム又はシリコンダイヤフラム等)及び当該ダイヤフラムの変位を計測する感圧素子を備えたものであって、ダイヤフラムの変位がこの感圧素子によって電気信号として検出され、内部電気回路によってその電気信号が増幅等されて、検出流量に応じた値を有する圧力測定信号として出力されるようにしたものである。
【0020】
制御部5は、CPUやメモリ、A/D変換器、D/A変換器等を有したデジタル乃至アナログ電気回路で構成されたもので、専用のものであってもよいし、一部又は全部にパソコン等の汎用コンピュータを利用するようにしたものであってもよい。また、CPUを用いず、アナログ回路のみで前記各部としての機能を果たすように構成してもよいし、物理的に一体である必要はなく、有線乃至無線によって互いに接続された複数の機器からなるものであってもよい。
【0021】
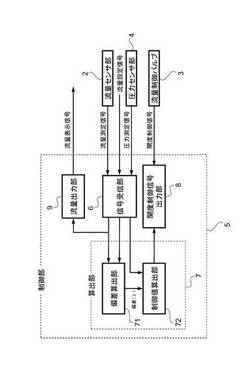
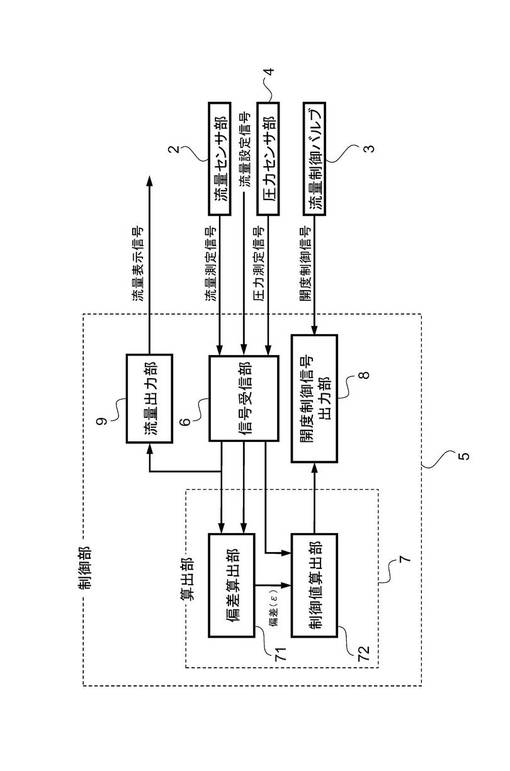
そして前記メモリに所定のプログラムを格納し、そのプログラムにしたがってCPUやその周辺機器を協働動作させることによって、この制御部5が、図3に示すように、信号受信部6、算出部7、開度制御信号出力部8及び流量出力部9としての機能を少なくとも発揮するように構成している。
【0022】
信号受信部6は、流量センサ部2から送信されてくる流量測定信号、別コンピュータ等から入力される流量設定信号等、及び圧力センサ部4から送信されてくる圧力測定信号を受信し、それらの値を例えばメモリ内の所定領域に格納するものである。
【0023】
算出部7は、前記流量測定信号の示す流量測定値を取得するとともに、その流量測定値と目標値、すなわち前記流量設定信号が示す流量設定値との偏差を算出する偏差算出部71と、その偏差にPID演算を施して流量制御バルブ3へのフィードバック制御値を算出する制御値算出部72と、を備えたものである。
【0024】
開度制御信号出力部8は、前記フィードバック制御値に基づく値を有する開度制御信号を生成し、その開度制御信号を流量制御バルブ3に出力するものである。
【0025】
流量出力部9は、前記流量測定値に所定の演算を施して流量表示値を算出し、その流量表示値を値として有する流量表示信号(アナログ又はデジタル信号)を、外部での利用が可能なように出力するものである。
【0026】
しかして、この実施形態では、制御値算出部72が、流量が安定して流れている状態(安定状態)におけるPID演算に用いる比例係数(P)、積分係数(I)及び微分係数(D)(つまり、安定状態のPID制御に用いるPID係数)を、一次側圧力(供給圧)、当該一次側圧力の時間変化量及び前記流量設定値に基づいて変更させるものである。ここで、安定状態とは、流量設定値を単位時間で所定量以上変化させた時点からの所定期間である変化期間(例えば2秒程度)以外の期間における状態であり、流量設定値はほとんど変化しない。また、所定量とは、フルスケールに対する%値で0〜10%程度をいい、好ましくは0.3〜5%である。さらに、所定期間とは、数秒程度を意味し、具体的には0〜10秒程度をいい、好ましくは0.3〜5秒である。
【0027】
より詳細に制御値算出部72は、一次側圧力(マスフローコントローラの上流側の圧力)の時間変化量の正負によって、比例係数、積分係数及び微分係数(以下、PID係数ともいう。)を変更し、それによって、変更されたPID係数を、流量設定値を所定の関数に代入して得られる値を用いて演算することにより変更し、それによって変更されたPID係数を、一次側圧力を所定の関数に代入して得られる値を用いて演算することにより変更する。また、制御値算出部72は、一次側圧力の時間変化量の正負により、つまり、dp/dt>0の場合とdp/dt≦0の場合によって、流量設定値に固有の関数及び一次側圧力に固有の関数を異ならせている。
【0028】
以下、制御値算出部72における具体的な変更方法について、図4を参照して説明する。
【0029】
まず、制御値算出部72は、圧力センサ部4により得られた一次側圧力の圧力測定信号を取得して、一次側圧力及び当該一次側圧力の時間変化量を算出する。
【0030】
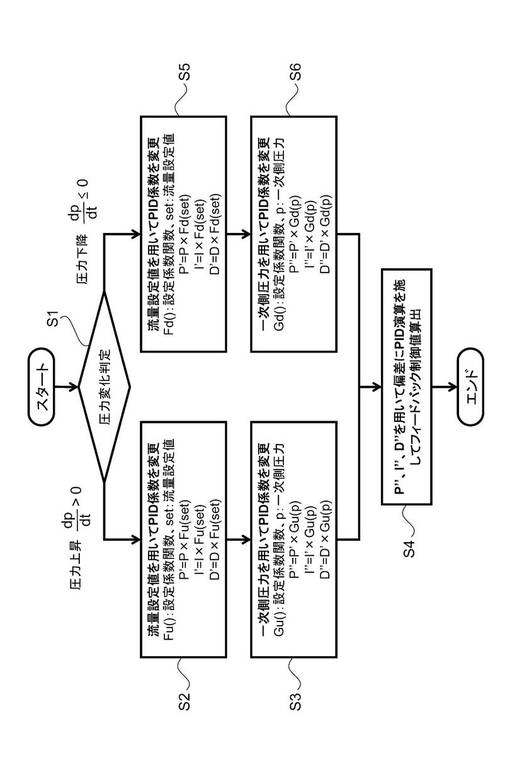
そして、制御値算出部72は、一次側圧力の時間変化量の正負を判断する(ステップS1)。一次側圧力の時間変化量が正の場合(dp/dt>0)と判断した場合、つまり一次側圧力上昇時には、制御値算出部72は、以下の式により、流量設定値に基づいてPID係数を変更する(ステップS2)。
【0031】
P’=P×Fu(set) ・・・(1)
I’=I×Fu(set) ・・・(2)
D’=D×Fu(set) ・・・(3)
【0032】
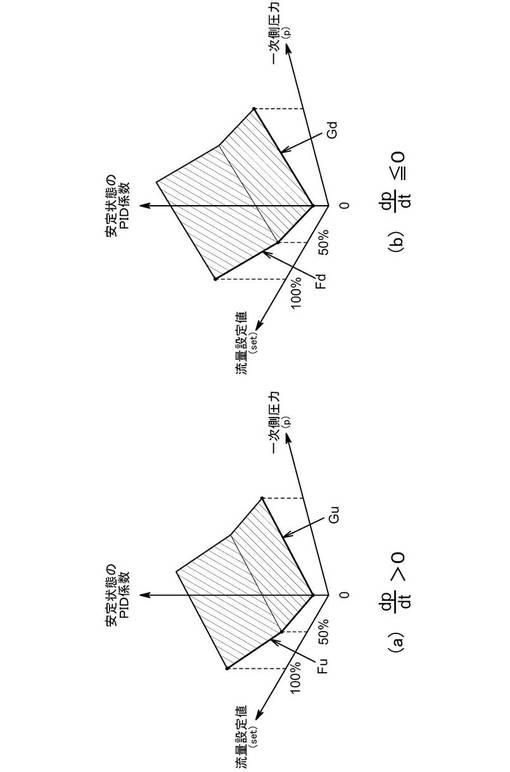
ここで、Fu()は、流量設定値に固有の関数である設定係数関数であり、setは流量設定値を示す。本実施形態の設定係数関数Fuは、図5(a)に示すように、0−50%の比例定数、50−100%の比例定数が異なる折れ線関数である。折れ線形状は、これに限られず適宜設定可能である。なお、この設定係数関数Fuは、曲線関数とすることができるが、演算処理量が増大し、またPID係数の調整が困難になるという問題がある。
【0033】
次に、制御値算出部72は、以下の式により、上記(1)〜(3)により得られたP’I’D’係数を一次側圧力に基づいて変更する(ステップS3)。
【0034】
P”=P’×Gu(p) ・・・(4)
I”=I’×Gu(p) ・・・(5)
D”=D’×Gu(p) ・・・(6)
【0035】
ここで、Gu()は、一次側圧力に固有の関数である圧力係数関数であり、pは一次側圧力値を示す。本実施形態の圧力係数関数は、図5(a)に示すように、入力される一次側圧力に比例した値が算出される比例関数である。なお、この圧力係数関数Guは折れ線関数又は曲線関数とすることもできる。曲線関数とした場合、演算処理量が増大し、またPID係数の調整が困難になるという問題がある。
【0036】
以上により、制御値算出部72は、一次側圧力の時間変化量が正の場合に、流量設定値及び一次側圧力に基づいてP、I、DをP”、I”、D”に変更し、当該PID係数(比例係数P”、積分係数I”及び微分係数D”)を用いて偏差にPID演算を施してフィードバック制御値を算出する(ステップS4)。
【0037】
一方、制御値算出部72は、一次側圧力の変化量が負であると判断した場合、つまり一次側圧力下降時には、以下の式により、流量設定値に基づいてPID係数を変更する(ステップS5)。
【0038】
P’=P×Fd(set) ・・・(7)
I’=I×Fd(set) ・・・(8)
D’=D×Fd(set) ・・・(9)
【0039】
ここで、Fd()は、流量設定値に固有の関数である設定係数関数であり、setは流量設定値を示す。この設定係数関数Fdは、図5(b)に示すように、前記設定係数関数Fuと同様折れ線関数であるが、屈曲点及び比例定数が異なる。なお、この設定係数関数Fdは、曲線関数とすることができるが、演算処理量が増大し、またPID係数の調整が困難になるという問題がある。
【0040】
次に、制御値算出部72は、以下の式により、上記(7)〜(9)により得られたP’I’D’係数を一次側圧力に基づいて変更する(ステップS6)。
【0041】
P”=P’×Gd(p) ・・・(10)
I”=I’×Gd(p) ・・・(11)
D”=D’×Gd(p) ・・・(12)
【0042】
ここで、Gd()は、一次側圧力に固有の関数である圧力係数関数であり、pは一次側圧力値を示す。この圧力係数関数Gdは、図5(b)に示すように、前記圧力係数関数Fdと同様比例関数であるが、前記圧力係数Fdの比例定数とは異なる比例定数である。なお、この圧力係数関数Gdは折れ線関数又は曲線関数とすることもできる。曲線関数とした場合、演算処理量が増大し、またPID係数の調整が困難になるという問題がある。
【0043】
以上により、制御値算出部72は、一次側圧力の時間変化量が負の場合に、流量設定値及び一次側圧力に基づいてP、I、DをP”、I”、D”に変更し、当該PID係数(比例係数P”、積分係数I”及び微分係数D”)を用いて偏差にPID演算を施してフィードバック制御値を算出する(ステップS4)。
【0044】
<本実施形態の効果>
このように構成した本実施形態に係るマスフローコントローラ100によれば、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力、当該一次側圧力の時間変化量、及び前記流量設定値に基づいて変更させているので、従来の流量設定値により比例係数、積分係数及び微分係数を比例させて変更させる方法に比べて、より最適な比例係数、積分係数及び微分係数を得ることができ、その結果、一次側圧力の圧力変動の影響を受けにくく、安定した流量制御を行うことができる。
【0045】
<その他の変形実施形態>
なお、本発明は前記実施形態に限られるものではない。以下の説明において前記実施形態に対応する部材には同一の符号を付すこととする。
【0046】
例えば、前記実施形態では、PID係数を一次側圧力、当該一次側圧力の時間変化量、及び前記流量設定値の全てに基づいて変更するようにしているが、それらの2つ、例えば一次側圧力と当該一次側圧力の時間変化量、一次側圧力と流量設定値等の組み合わせを用いて変更するようにしても良い。
【0047】
また、前記実施形態において、PID係数の変更手順としては、「一次側圧力の時間変化量による変更」→「流量設定値による変更」→「一次側圧力による変更」の順であったが、これに限られず、その他の組み合わせであってもよい。
【0048】
さらに、制御バルブを流量センサ部の上流側に設けてもよいし、流量センサ部は、前記サーマルセンサに限られるものではなく、差圧式センサなど他の流量測定方式のものであってもよい。
【0049】
その他、前述した実施形態や変形実施形態の一部又は全部を適宜組み合わせてよいし、本発明は前記実施形態に限られず、その趣旨を逸脱しない範囲で種々の変形が可能であるのは言うまでもない。
【符号の説明】
【0050】
100・・・マスフローコントローラ
1 ・・・流路
2 ・・・流量センサ部
3 ・・・流量制御バルブ
7 ・・・算出部
8 ・・・開度制御信号出力部
【技術分野】
【0001】
本発明は、ガスや液体などの流体の流量を制御するマスフローコントローラに関するものである。
【背景技術】
【0002】
例えば、半導体の製造に用いられる各種ガス等を半導体製造装置に供給する場合、それらの供給流路にマスフローコントローラをそれぞれ設け、これによってガス流量をそれぞれ調節するようにしている。そして従前は、各マスフローコントローラにそれぞれ圧力レギュレータを直列付帯させ、各マスフローコントローラの流路内圧力に極端な変動が生じないようにして、流量制御を容易化している。
【0003】
前記マスフローコントローラにおける流量制御方式としては、PID制御が基本であるが、例えば、特許文献1に示すように、過渡的な応答状態と安定状態とでPID係数を切り替えてフィードバック制御を行うようにしたものが知られている。
【0004】
具体的に特許文献1に示すものは、比例演算における偏差に乗算するゲイン値として、流量設定値を所定の関数に代入して得られる値を用いており、例えば安定状態において用いられる前記所定の関数は、代入される流量設定値が小さくなれば小さな値が算出されるものである。つまり、特許文献1に示す従来のマスフローコントローラは、安定状態での比例係数、積分係数及び微分係数(以下、PID係数ともいう。)を流量設定値のみに比例させて変更するだけである。
【0005】
しかしながら、本願発明者は、安定状態において一次側圧力の上昇時と下降時とでPID係数の最適値が異なること、また、一次側圧力の時間変化量が同じであっても、変化前の一次側圧力が異なればPID係数が異なること、さらに、流量設定値とPID係数最適値とが直線関係にならないという実験結果を得た。そうすると、安定状態においてPID係数を流量設定値に比例させるだけではPI(Pressure Insensitive)性能の向上には限界があることが判明した。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2007−34550号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
そこで本発明は、上記問題点を一挙に解決するためになされたものであり、マスフローコントローラにおけるPI性能をさらに向上させることをその主たる所期課題とするものである。
【課題を解決するための手段】
【0008】
すなわち本発明に係るマスフローコントローラは、流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部と、当該流量センサ部の上流側又は下流側に設けた流量制御バルブと、前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差にPID演算を施して流量制御バルブへのフィードバック制御値を算出する算出部と、前記フィードバック制御値に基づいて開度制御信号を生成し、流量制御バルブに出力する開度制御信号出力部と、を備え、前記算出部が、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力又は流量設定値の少なくとも1つと、前記一次側圧力の時間変化量と、に基づいて変更することを特徴とする。
【0009】
このようなものであれば、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力、当該一次側圧力の時間変化量、及び前記流量設定値の少なくとも2つに基づいて変更させているので、従来の流量設定値により比例係数、積分係数及び微分係数を比例させて変更させる方法に比べて、より最適な比例係数、積分係数及び微分係数を得ることができ、その結果、一次側圧力の圧力変動の影響を受けにくく、安定した流量制御を行うことができる。
【0010】
特に、安定状態において一次側圧力の上昇時と下降時とで比例係数、積分係数及び微分係数の最適値が異なることから、前記算出部が、一次側圧力の時間変化量の正負によって、比例係数、積分係数及び微分係数を変更するものであることが望ましい。
【0011】
比例係数、積分係数及び微分係数を最も最適な値にして、一次側圧力の圧力変動の影響を受けにくく、安定した流量制御を行うためには、前記算出部が、一次側圧力の時間変化量の正負によって、比例係数、積分係数及び微分係数を変更し、それによって変更された比例係数、積分係数及び微分係数に流量設定値を所定の関数に代入して得られる値を用いて所定演算することにより変更し、それによって変更された比例係数、積分係数及び微分係数に一次側圧力を所定の関数に代入して得られる値を用いて所定演算することにより変更するものであることが望ましい。
【発明の効果】
【0012】
このように構成した本発明によれば、マスフローコントローラにおけるPI性能を向上させることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係るマスフローコントローラの全体模式図。
【図2】同実施形態に係るマスフローコントローラを用いた流量制御システムの構成例。
【図3】同実施形態における制御部の機能ブロック図。
【図4】同実施形態におけるPID係数変更手順を示すフローチャート。
【図5】PID係数変更に用いる関数を示す模式図。
【発明を実施するための形態】
【0014】
以下に本発明に係る質量流量計100の一実施形態について図面を参照して説明する。なお、図1は本実施形態に係るマスフローコントローラの全体模式図であり、図2はマスフローコントローラを用いた流量制御システムの構成例であり、図3は制御部の機能ブロック図であり、図4はPID係数変更手順を示すフローチャートであり、図5はPID係数変更に用いる関数を示す模式図である。
【0015】
<装置構成>
本実施形態のマスフローコントローラ100は、図1に模式図を示すように、内部流路1と、その内部流路1内を流れる流体Fの流量を測定する流量センサ部2と、その流量センサ部2の例えば下流側に設けた流量制御バルブ3と、前記流量センサ部2及び流量制御バルブ3の上流側に設けた圧力センサ部4と、制御部5とを備えているもので、例えば図2に示すように、半導体プロセスにおけるチャンバへのガス供給システムに用いられる。
【0016】
各部を説明すると、内部流路1は、上流端を導入ポートP1、下流端を導出ポートP2としてそれぞれ開口するもので、例えば、導入ポートP1には、外部配管を介してボンベ等の流体供給源Bが接続され、導出ポートP2には、外部配管を介して、半導体製造のためのチャンバ(図示しない)が接続されている。なお、この実施形態では、同図に示すように、1つの流体供給源Bから配管を複数分岐させ、各配管にそれぞれマスフローコントローラ100を設けるようにしている。また、圧力レギュレータPRは、流体供給源Bの出口にのみ設けてあり、各配管それぞれには、マスフローコントローラ100用の圧力レギュレータは設けられていない。なお符号FVは空圧弁である
【0017】
流量センサ部2は、詳細は図示しないが、例えば、流路1に設けられた一対の感熱センサ(サーマルセンサ)を備えたものであって、流体Fの瞬時流量がこの感熱センサによって電気信号として検出され、内部電気回路によってその電気信号が増幅等されて、検出流量に応じた値を有する流量測定信号として出力されるようにしたものである。
【0018】
流量制御バルブ3は、やはり詳細は図示しないが、例えば、その弁開度をピエゾ素子よりなるアクチュエータによって変化させ得るように構成したものであって、外部からの電気信号である開度制御信号を与えられることによって前記アクチュエータを駆動し、その開度制御信号の値に応じた弁開度に調整して流体Fの流量を制御するものである。
【0019】
圧力センサ部4は、詳細は図示しないが、例えば、ダイヤフラム(ステンレスダイヤフラム又はシリコンダイヤフラム等)及び当該ダイヤフラムの変位を計測する感圧素子を備えたものであって、ダイヤフラムの変位がこの感圧素子によって電気信号として検出され、内部電気回路によってその電気信号が増幅等されて、検出流量に応じた値を有する圧力測定信号として出力されるようにしたものである。
【0020】
制御部5は、CPUやメモリ、A/D変換器、D/A変換器等を有したデジタル乃至アナログ電気回路で構成されたもので、専用のものであってもよいし、一部又は全部にパソコン等の汎用コンピュータを利用するようにしたものであってもよい。また、CPUを用いず、アナログ回路のみで前記各部としての機能を果たすように構成してもよいし、物理的に一体である必要はなく、有線乃至無線によって互いに接続された複数の機器からなるものであってもよい。
【0021】
そして前記メモリに所定のプログラムを格納し、そのプログラムにしたがってCPUやその周辺機器を協働動作させることによって、この制御部5が、図3に示すように、信号受信部6、算出部7、開度制御信号出力部8及び流量出力部9としての機能を少なくとも発揮するように構成している。
【0022】
信号受信部6は、流量センサ部2から送信されてくる流量測定信号、別コンピュータ等から入力される流量設定信号等、及び圧力センサ部4から送信されてくる圧力測定信号を受信し、それらの値を例えばメモリ内の所定領域に格納するものである。
【0023】
算出部7は、前記流量測定信号の示す流量測定値を取得するとともに、その流量測定値と目標値、すなわち前記流量設定信号が示す流量設定値との偏差を算出する偏差算出部71と、その偏差にPID演算を施して流量制御バルブ3へのフィードバック制御値を算出する制御値算出部72と、を備えたものである。
【0024】
開度制御信号出力部8は、前記フィードバック制御値に基づく値を有する開度制御信号を生成し、その開度制御信号を流量制御バルブ3に出力するものである。
【0025】
流量出力部9は、前記流量測定値に所定の演算を施して流量表示値を算出し、その流量表示値を値として有する流量表示信号(アナログ又はデジタル信号)を、外部での利用が可能なように出力するものである。
【0026】
しかして、この実施形態では、制御値算出部72が、流量が安定して流れている状態(安定状態)におけるPID演算に用いる比例係数(P)、積分係数(I)及び微分係数(D)(つまり、安定状態のPID制御に用いるPID係数)を、一次側圧力(供給圧)、当該一次側圧力の時間変化量及び前記流量設定値に基づいて変更させるものである。ここで、安定状態とは、流量設定値を単位時間で所定量以上変化させた時点からの所定期間である変化期間(例えば2秒程度)以外の期間における状態であり、流量設定値はほとんど変化しない。また、所定量とは、フルスケールに対する%値で0〜10%程度をいい、好ましくは0.3〜5%である。さらに、所定期間とは、数秒程度を意味し、具体的には0〜10秒程度をいい、好ましくは0.3〜5秒である。
【0027】
より詳細に制御値算出部72は、一次側圧力(マスフローコントローラの上流側の圧力)の時間変化量の正負によって、比例係数、積分係数及び微分係数(以下、PID係数ともいう。)を変更し、それによって、変更されたPID係数を、流量設定値を所定の関数に代入して得られる値を用いて演算することにより変更し、それによって変更されたPID係数を、一次側圧力を所定の関数に代入して得られる値を用いて演算することにより変更する。また、制御値算出部72は、一次側圧力の時間変化量の正負により、つまり、dp/dt>0の場合とdp/dt≦0の場合によって、流量設定値に固有の関数及び一次側圧力に固有の関数を異ならせている。
【0028】
以下、制御値算出部72における具体的な変更方法について、図4を参照して説明する。
【0029】
まず、制御値算出部72は、圧力センサ部4により得られた一次側圧力の圧力測定信号を取得して、一次側圧力及び当該一次側圧力の時間変化量を算出する。
【0030】
そして、制御値算出部72は、一次側圧力の時間変化量の正負を判断する(ステップS1)。一次側圧力の時間変化量が正の場合(dp/dt>0)と判断した場合、つまり一次側圧力上昇時には、制御値算出部72は、以下の式により、流量設定値に基づいてPID係数を変更する(ステップS2)。
【0031】
P’=P×Fu(set) ・・・(1)
I’=I×Fu(set) ・・・(2)
D’=D×Fu(set) ・・・(3)
【0032】
ここで、Fu()は、流量設定値に固有の関数である設定係数関数であり、setは流量設定値を示す。本実施形態の設定係数関数Fuは、図5(a)に示すように、0−50%の比例定数、50−100%の比例定数が異なる折れ線関数である。折れ線形状は、これに限られず適宜設定可能である。なお、この設定係数関数Fuは、曲線関数とすることができるが、演算処理量が増大し、またPID係数の調整が困難になるという問題がある。
【0033】
次に、制御値算出部72は、以下の式により、上記(1)〜(3)により得られたP’I’D’係数を一次側圧力に基づいて変更する(ステップS3)。
【0034】
P”=P’×Gu(p) ・・・(4)
I”=I’×Gu(p) ・・・(5)
D”=D’×Gu(p) ・・・(6)
【0035】
ここで、Gu()は、一次側圧力に固有の関数である圧力係数関数であり、pは一次側圧力値を示す。本実施形態の圧力係数関数は、図5(a)に示すように、入力される一次側圧力に比例した値が算出される比例関数である。なお、この圧力係数関数Guは折れ線関数又は曲線関数とすることもできる。曲線関数とした場合、演算処理量が増大し、またPID係数の調整が困難になるという問題がある。
【0036】
以上により、制御値算出部72は、一次側圧力の時間変化量が正の場合に、流量設定値及び一次側圧力に基づいてP、I、DをP”、I”、D”に変更し、当該PID係数(比例係数P”、積分係数I”及び微分係数D”)を用いて偏差にPID演算を施してフィードバック制御値を算出する(ステップS4)。
【0037】
一方、制御値算出部72は、一次側圧力の変化量が負であると判断した場合、つまり一次側圧力下降時には、以下の式により、流量設定値に基づいてPID係数を変更する(ステップS5)。
【0038】
P’=P×Fd(set) ・・・(7)
I’=I×Fd(set) ・・・(8)
D’=D×Fd(set) ・・・(9)
【0039】
ここで、Fd()は、流量設定値に固有の関数である設定係数関数であり、setは流量設定値を示す。この設定係数関数Fdは、図5(b)に示すように、前記設定係数関数Fuと同様折れ線関数であるが、屈曲点及び比例定数が異なる。なお、この設定係数関数Fdは、曲線関数とすることができるが、演算処理量が増大し、またPID係数の調整が困難になるという問題がある。
【0040】
次に、制御値算出部72は、以下の式により、上記(7)〜(9)により得られたP’I’D’係数を一次側圧力に基づいて変更する(ステップS6)。
【0041】
P”=P’×Gd(p) ・・・(10)
I”=I’×Gd(p) ・・・(11)
D”=D’×Gd(p) ・・・(12)
【0042】
ここで、Gd()は、一次側圧力に固有の関数である圧力係数関数であり、pは一次側圧力値を示す。この圧力係数関数Gdは、図5(b)に示すように、前記圧力係数関数Fdと同様比例関数であるが、前記圧力係数Fdの比例定数とは異なる比例定数である。なお、この圧力係数関数Gdは折れ線関数又は曲線関数とすることもできる。曲線関数とした場合、演算処理量が増大し、またPID係数の調整が困難になるという問題がある。
【0043】
以上により、制御値算出部72は、一次側圧力の時間変化量が負の場合に、流量設定値及び一次側圧力に基づいてP、I、DをP”、I”、D”に変更し、当該PID係数(比例係数P”、積分係数I”及び微分係数D”)を用いて偏差にPID演算を施してフィードバック制御値を算出する(ステップS4)。
【0044】
<本実施形態の効果>
このように構成した本実施形態に係るマスフローコントローラ100によれば、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力、当該一次側圧力の時間変化量、及び前記流量設定値に基づいて変更させているので、従来の流量設定値により比例係数、積分係数及び微分係数を比例させて変更させる方法に比べて、より最適な比例係数、積分係数及び微分係数を得ることができ、その結果、一次側圧力の圧力変動の影響を受けにくく、安定した流量制御を行うことができる。
【0045】
<その他の変形実施形態>
なお、本発明は前記実施形態に限られるものではない。以下の説明において前記実施形態に対応する部材には同一の符号を付すこととする。
【0046】
例えば、前記実施形態では、PID係数を一次側圧力、当該一次側圧力の時間変化量、及び前記流量設定値の全てに基づいて変更するようにしているが、それらの2つ、例えば一次側圧力と当該一次側圧力の時間変化量、一次側圧力と流量設定値等の組み合わせを用いて変更するようにしても良い。
【0047】
また、前記実施形態において、PID係数の変更手順としては、「一次側圧力の時間変化量による変更」→「流量設定値による変更」→「一次側圧力による変更」の順であったが、これに限られず、その他の組み合わせであってもよい。
【0048】
さらに、制御バルブを流量センサ部の上流側に設けてもよいし、流量センサ部は、前記サーマルセンサに限られるものではなく、差圧式センサなど他の流量測定方式のものであってもよい。
【0049】
その他、前述した実施形態や変形実施形態の一部又は全部を適宜組み合わせてよいし、本発明は前記実施形態に限られず、その趣旨を逸脱しない範囲で種々の変形が可能であるのは言うまでもない。
【符号の説明】
【0050】
100・・・マスフローコントローラ
1 ・・・流路
2 ・・・流量センサ部
3 ・・・流量制御バルブ
7 ・・・算出部
8 ・・・開度制御信号出力部
【特許請求の範囲】
【請求項1】
流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部と、
当該流量センサ部の上流側又は下流側に設けた流量制御バルブと、
前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差にPID演算を施して流量制御バルブへのフィードバック制御値を算出する算出部と、
前記フィードバック制御値に基づいて開度制御信号を生成し、流量制御バルブに出力する開度制御信号出力部と、を備え、
前記算出部が、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力又は流量設定値の少なくとも1つと、前記一次側圧力の時間変化量と、に基づいて変更することを特徴とするマスフローコントローラ。
【請求項2】
前記算出部が、所定の一次側圧力が与えられた場合に、一次側圧力の時間変化量の正負によって、比例係数、積分係数及び微分係数を異ならせるものである請求項1記載のマスフローコントローラ。
【請求項3】
前記算出部が、所定の流量設定値が与えられた場合に、一次側圧力の時間変更量の正負によって、比例係数、積分係数及び微分係数を異ならせるものである請求項1又は2記載のマスフローコントローラ。
【請求項4】
前記算出部が、一次側圧力の時間変化量の正負によって、比例係数、積分係数及び微分係数の値そのものを変更し、それによって変更された比例係数、積分係数及び微分係数に流量設定値を前記流量設定値に固有の関数に代入して得られる値を用いて所定演算することにより変更し、それによって変更された比例係数、積分係数及び微分係数に一次側圧力を前記一次側圧力に固有の関数に代入して得られる値を用いて所定演算することにより変更するものである請求項1、2又は3記載のマスフローコントローラ。
【請求項1】
流路内を流れる流体の流量を測定し、その測定値を示す流量測定信号を出力する流量センサ部と、
当該流量センサ部の上流側又は下流側に設けた流量制御バルブと、
前記流量測定信号の示す流量測定値と目標値である流量設定値との偏差にPID演算を施して流量制御バルブへのフィードバック制御値を算出する算出部と、
前記フィードバック制御値に基づいて開度制御信号を生成し、流量制御バルブに出力する開度制御信号出力部と、を備え、
前記算出部が、安定状態におけるPID演算に用いる比例係数、積分係数及び微分係数を、一次側圧力又は流量設定値の少なくとも1つと、前記一次側圧力の時間変化量と、に基づいて変更することを特徴とするマスフローコントローラ。
【請求項2】
前記算出部が、所定の一次側圧力が与えられた場合に、一次側圧力の時間変化量の正負によって、比例係数、積分係数及び微分係数を異ならせるものである請求項1記載のマスフローコントローラ。
【請求項3】
前記算出部が、所定の流量設定値が与えられた場合に、一次側圧力の時間変更量の正負によって、比例係数、積分係数及び微分係数を異ならせるものである請求項1又は2記載のマスフローコントローラ。
【請求項4】
前記算出部が、一次側圧力の時間変化量の正負によって、比例係数、積分係数及び微分係数の値そのものを変更し、それによって変更された比例係数、積分係数及び微分係数に流量設定値を前記流量設定値に固有の関数に代入して得られる値を用いて所定演算することにより変更し、それによって変更された比例係数、積分係数及び微分係数に一次側圧力を前記一次側圧力に固有の関数に代入して得られる値を用いて所定演算することにより変更するものである請求項1、2又は3記載のマスフローコントローラ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−204265(P2011−204265A)
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願番号】特願2011−128689(P2011−128689)
【出願日】平成23年6月8日(2011.6.8)
【分割の表示】特願2008−258727(P2008−258727)の分割
【原出願日】平成20年10月3日(2008.10.3)
【出願人】(000127961)株式会社堀場エステック (88)
【Fターム(参考)】
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願日】平成23年6月8日(2011.6.8)
【分割の表示】特願2008−258727(P2008−258727)の分割
【原出願日】平成20年10月3日(2008.10.3)
【出願人】(000127961)株式会社堀場エステック (88)
【Fターム(参考)】
[ Back to top ]