
マッサージャー
【課題】マッサージ手段の位置を素早く検知することのできるマッサージャーを提供することである。
【解決手段】
被施療者の患部にマッサージを施すマッサージ手段50と、マッサージ手段50を患部に沿って移動させる移動手段40と、を具えるマッサージャーにおいて、マッサージ手段50の移行路に沿って延びるように突設された案内条103を有し、マッサージ手段50には、マッサージ手段50と一体に移動可能なスライダー105を具え、スライダー105に第1検知手段121と第2検知手段122を有し、案内条103に第1検知手段と第2検知手段により同時に検知可能な2つの被検知手段131,132と、スライダーの移行路の両端に、前記第1検知手段121と第2検知手段122の何れか一方により検知され、スライダー105が移行路端に達したことを検知する被検知手段141,142を有するようにした。
【解決手段】
被施療者の患部にマッサージを施すマッサージ手段50と、マッサージ手段50を患部に沿って移動させる移動手段40と、を具えるマッサージャーにおいて、マッサージ手段50の移行路に沿って延びるように突設された案内条103を有し、マッサージ手段50には、マッサージ手段50と一体に移動可能なスライダー105を具え、スライダー105に第1検知手段121と第2検知手段122を有し、案内条103に第1検知手段と第2検知手段により同時に検知可能な2つの被検知手段131,132と、スライダーの移行路の両端に、前記第1検知手段121と第2検知手段122の何れか一方により検知され、スライダー105が移行路端に達したことを検知する被検知手段141,142を有するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被施療者の患部にマッサージを施すマッサージャーに関するものであり、具体的には、患部に沿って移動し、マッサージを施すマッサージ手段の位置を検知することのできるマッサージャーに関するものである。
【背景技術】
【0002】
被施療者の患部にマッサージを施すマッサージ手段を患部に沿って往復移動可能に具えたマッサージャーがある。この種のマッサージャーでは、マッサージ手段の移行路に検知手段を配備し、マッサージ手段の位置を検知するようにしている(例えば、特許文献1の段落0008、特許文献2の段落0025参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−161437号公報
【特許文献2】特開2000−167021号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
マッサージ手段がマッサージ中に患部から受ける応力やケーシング等のバラツキ、ガタ、経年劣化等により、マッサージ手段の移行路にずれが生じることがあった。その結果、検知手段が、マッサージ手段やケーシング等と接触して損傷することがあり、マッサージ手段の正確な位置等を検知できなくなる虞がある。
【0005】
また、検知手段及び/又は被検知手段は、一般的に移行路の両端に設けられる。従って、移行路中でマッサージ手段の移行を停止し、再度マッサージ手段を作動させる場合、マッサージ手段の位置を検知するために、一旦マッサージ手段を移行路の端部まで移動させる必要があった。
【0006】
同様に、マッサージ手段を停止させる場合、マッサージ手段の位置を検知するために、マッサージ手段を移行路端まで移動させている。このため、マッサージを開始する場合に、所望位置までマッサージ手段を移動させる必要があり、迅速にマッサージ開始を行なうことができなかった。
【0007】
本発明の目的は、マッサージ手段の位置を素早く検知することのできるマッサージャーを提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明のマッサージャーは、
被施療者の患部にマッサージを施すマッサージ手段と、
マッサージ手段を患部に沿って移動させる移動手段と、
を具えるマッサージャーにおいて、
マッサージ手段の移行路に沿って延びるように突設された案内条を有し、
マッサージ手段には、マッサージ手段と一体に移動可能なスライダーを具え、
スライダーに第1検知手段と第2検知手段を有し、
案内条に第1検知手段と第2検知手段により同時に検知可能な2つの被検知手段と、スライダーの移行路の両端に、前記2つの検知手段の何れか一方により検知され、スライダーが移行路端に達したことを検知する被検知手段を有する。
また、前記スライダーには、前記案内条を跨ぐ凹部を形成することが望ましい
【発明の効果】
【0009】
本発明のマッサージャーによれば、スライダーに第1検知手段と第2検知手段を設け、該第1検知手段と第2検知手段が同時に被検知手段を検知することで、マッサージ手段が特定の位置にあることを検出することができ、また、何れか一方の検知手段のみが被検知手段を検知したときには、マッサージ手段が移行路の前端又は後端の位置にあることを検出することができる。
【0010】
これにより、マッサージ手段の位置検出を素早く行なうことができ、上記特定の位置を被施療者の患部近傍に設定することで、マッサージプログラムを開始するときには、被施療者の患部近傍から、マッサージを行なうことが可能である。このため、マッサージ開始時及び終了時に、マッサージ手段の無駄な移動を減らすことが可能である。
【0011】
また、スライダーに案内条を跨ぐ凹部を形成することにより、マッサージ手段を移動させると、スライダーは、凹部が案内条に跨った状態で移動するから、スライダーの移行路から案内条が外れることはない。
従って、スライダーに配備された検知手段が、案内条に配備された被検知手段と衝突等することを防止できる。
特に、マッサージ手段がマッサージ中に患部から受ける応力やケーシング等のバラツキ、ガタ、経年劣化等により、変形や歪みなどがあった場合でも、検知手段を保護することができ、正確なマッサージ手段の位置検知を行うことができる。
【図面の簡単な説明】
【0012】
【図1】図1は、本発明のマッサージャーを斜め前方から見た斜視図である。
【図2】図2は、図1の線A―Aに沿うマッサージャーの断面図である。
【図3】図3は、本発明のマッサージャーの側面断面図である。
【図4】図4は、後面エアバックを抜き出した状態のマッサージャーの平面図である。
【図5】図5は、後面エアバッグを抜き出した状態のマッサージャーの側面図である。
【図6】図6は、移動手段を取り付けた状態のケーシングの背面図である。
【図7】図7は、案内条に沿う検知手段の側面図である。
【図8】図8は、足裏用マッサージ手段を斜め前方から見た斜視図である。
【図9】図9は、図8のケーシングを、指圧子を含む面で切断して示す断面図である。
【図10】図10は、案内条とスライダーの拡大図である。
【図11】図11は、本発明のマッサージャーの制御ブロック図である。
【図12】図12は、移動手段の移動を制御するフローチャートである。
【図13】図13は、移動手段の速度を制御するフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明を、脚部にマッサージを施すマッサージャー(10)に適用した例について説明するが、本発明は、脚部用のマッサージャー(10)に限定されるものではなく、例えば被施療者の上半身や腕などの患部に沿って移動可能にマッサージを施すマッサージャーにも適用できる。
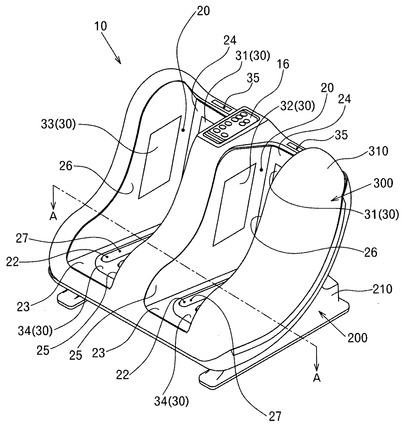
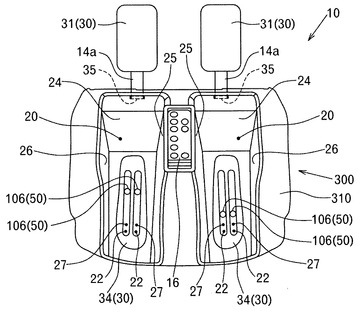
図1は、本発明を適用することのできるマッサージャー(10)の一例を示している。図1は、マッサージャー(10)を斜め前方から見た斜視図である。
【0014】
マッサージャー(10)は、床面に載置されるベースユニット(200)に被施療者の足先とふくらはぎをマッサージする本体ユニット(300)を搭載したものである。
【0015】
本発明において、大腿とは脚部の膝よりも上の部分、膝関節とは膝の屈折部分及びその周辺、ふくらはぎとは膝と足首の間であって、脛の裏側部分、足先とはくるぶしよりも下の部分を意味する。
【0016】
ベースユニット(200)は、内部中空の樹脂製のベースケーシング(210)から形成され、上部にて本体ユニット(300)を支持し、下面にて安定してマッサージャー(10)を床面に載置する。ベースケーシング(210)の内部には、エアポンプ(14)(図11参照)、制御基板(図示せず)、商業電源(図示せず)へ接続するための電源ユニット等が収容される。
【0017】
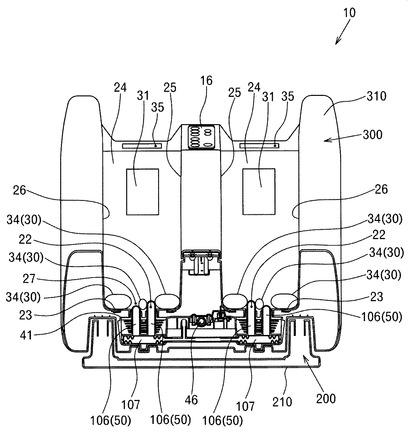
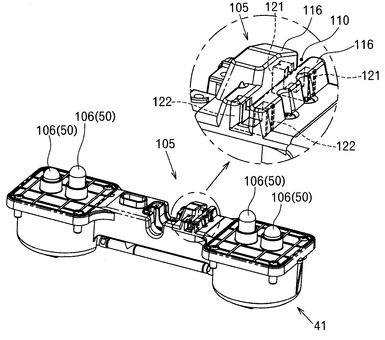
また、ベースユニット(200)内部には、図2に示すように、被施療者の足裏をマッサージするための足裏用マッサージ手段(50)を有するケーシング(41)を収納する。ベースユニット(200)内部には、ケーシング(41)と連結し、マッサージ手段(50)を被施療者の患部を前後に移動可能にする移動手段(40)を具える。足裏用マッサージ手段(50)として、本体ユニット(300)の底面(23)から臨出可能な指圧子(106)を挙げることができる。足裏用マッサージ手段(50)を移動させる移動手段(40)については、後述する。
【0018】
ベースユニット(200)には、本体ユニット(300)を揺動可能に載置するためのリクライニング機構(400)を配備することができる。
【0019】
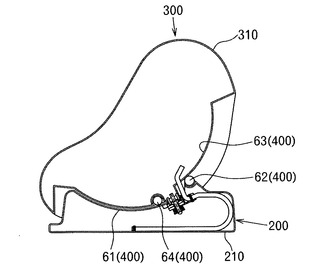
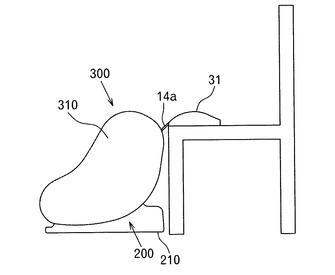
リクライニング機構(400)として、図3に示すように、ベースケーシング(210)の上面左右に形成された円弧状のベース側ガイド(61)と、該ベース側ガイド(61)の後方端に配備されたベース側ローラ(62)を有する。
【0020】
また、図3に示すように、本体ユニット(300)には、円弧状の本体ユニット側ガイド(63)と本体ユニット側ローラ(64)を有しており、本体ユニット側ガイド(63)に、前記ベースユニット側ローラ(62)が嵌まり、前記ベースユニット側ガイド(61)に本体ユニット側ローラ(64)が嵌まっている。
【0021】
本体ユニット(300)を後方に向けて傾けると、ベースユニット側ガイド(61)を本体ユニット側ローラ(64)が転動し、本体ユニット側ガイド(63)をベースユニット側ローラ(62)が転動することで、本体ユニット(300)は、ベースユニット(200)に対してリクライニングする。
【0022】
本体ユニット(300)は、内部中空の樹脂製の本体ケーシング(310)を有している。本体ユニット(300)には、被施療者の足先及び/又はふくらはぎをマッサージする本体マッサージ手段(30)が配備される。本体ケーシング(310)は、ベースユニット(200)に対してリクライニング可能に配備することもできるし、固定して配備することもできる。
【0023】
本体ユニット(300)は、図1に示すように、下側が前方に向けて突出し、後側が上向きに突出して、被施療者の足先及びふくらはぎが挿入可能な左右一対の凹部(20)(20)を形成している。凹部(20)(20)は、図1に示すように、本体ユニット(300)がベースユニット(200)に対してほぼ垂直に立設した状態で、底面(23)が床面とほぼ平行となり、底面(23)の後端から上方に向けてほぼ垂直に後面(24)を有し、底面(23)と後面(24)の側部を結ぶように内側面(25)と外側面(26)を有しており、前方及び上方が開口した形状を例示できる。
【0024】
また、凹部(20)の底面(23)には、図2に示すように、足裏用マッサージ手段(50)である指圧子(106)が、被施療者の患部を前後方向に移動可能かつ臨出可能に、開口(22)が形成されている。
【0025】
本体ユニット(300)に被施療者が足を挿入したときに、凹部(20)(20)の底面(23)(23)には、被施療者の足裏が当接し、凹部(20)(20)の後面(24)(24)にはふくらはぎが当接し、内側面(25)(25)及び外側面(26)(26)には、ふくらはぎの内側及び外側が夫々当接又は近接する。
【0026】
本体ユニット(300)には、凹部(20)(20)に本体マッサージ手段(30)が配備される。本体マッサージ手段(30)として、ふくらはぎ用の内側エアバッグ(32)、外側エアバッグ(33)、ふくらはぎ用後面エアバッグ(31)、及び足裏をマッサージする足裏用底面エアバッグ(34)が配備されている。
【0027】
ふくらはぎ用内側エアバッグ(32)は、図1に示すように、前記凹部(20)の内側面(25)に配備され、ふくらはぎ用外側エアバッグ(33)は、凹部(20)の外側面(26)に配備される。また、ふくらはぎ用後面エアバッグ(31)は、凹部(20)の後面(24)に配備され、足裏用底面エアバッグ(34)は、凹部(20)の底面(23)に配備される。各エアバッグ(31)(32)(33)(34)は、電磁バルブ(31a)(32a)(33a)(34a)を介してエアポンプ(14)に連繋されている。
【0028】
ふくらはぎ用後面エアバッグ(31)は、エアポンプ(14)からの電磁バルブ(31a)を介した空気供給部(14a)と連繋している。空気供給部(14a)は、本体ユニット(300)内の上部に位置している。ふくらはぎ用後面エアバッグ(31)は、空気供給部(14a)を回転軸として、回転することができる。図4及び図5に示すように、空気供給部(14a)と一緒にふくらはぎ用後面エアバッグ(31)を、本体ユニット(300)上部に具えた取出孔(35)から引き出し、被施療者の座る椅子に載置させ、被施療者の太腿裏部へ配置することが可能である。
【0029】
また、本体ユニット(300)をリクライニングさせた状態で、ふくらはぎ用後面エアバッグ(31)を引き出すことにより、被施療者が仰向けになった状態で、ふくらはぎ用後面エアバッグ(31)を被施療者の大腿裏部へ配置することも可能である。
【0030】
これにより、本マッサージャー(10)のように、大腿用のマッサージ手段を有さないマッサージャー(10)であっても、ふくらはぎから大腿にかけて、被施療者の患部を広い範囲でマッサージすることができる。
【0031】
足裏用底面エアバッグ(34)は、図4に示すように、本体ユニット(300)の凹部(20)の底面(23)から臨出する指圧子(106)の移動方向に沿って、前後方向に指圧子(106)が移動可能かつ臨出可能な長孔(27)を形成する。
【0032】
足裏用底面エアバッグ(34)に形成された長孔(27)を指圧子(106)が貫通して、被施療者の足裏にマッサージを施すことができる。
【0033】
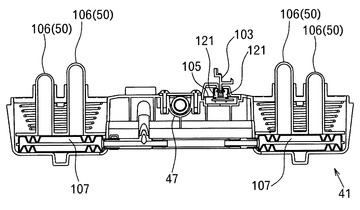
指圧子(106)は、図2及び図9に示すように、指圧子(106)の基端側に具えた伸縮用エアバッグ(107)と連結される。伸縮用エアバッグ(107)は、電磁バルブ(51a)を介してエアポンプ(14)と連結される。バルブ(51a)は制御手段(70)により動作を制御される。
【0034】
指圧子(106)は、伸縮用エアバッグ(107)を膨張、収縮又は膨張させておくことで、凹部(20)の底面(23)に形成された開口(22)より出没又は突出した状態で前後に移動し、被施療者の足裏に押圧や指圧の如きマッサージを施すことができる。
【0035】
また、指圧子(106)は、ソレノイド機構(図示せず)を具えることが可能である。指圧子(106)が左右に振動可能に配備されることにより、被施療者の足裏へ、押圧によるマッサージだけでなく、横方向への振動マッサージを施すことが可能である。
【0036】
これにより、被施療者の足裏に、指圧子(106)を用いて、振動マッサージを施すことができる。
【0037】
凹部(20)の底面(23)には、指圧子(106)と被施療者の足裏の間に足裏用底面エアバッグ(34)が配置される。足裏用底面エアバッグ(34)には、指圧子(106)が貫通するために、被施療者の患部に沿った長孔(27)が形成されている。該足裏用底面エアバッグ(34)を膨縮させることにより、指圧子(106)の押圧による足裏へのマッサージの強弱を調整することが可能である。
【0038】
指圧子(106)の押圧によるマッサージの調節方法として、マッサージを弱めたいときは、指圧子(106)と被施療者の足裏の間に配置した足裏用底面エアバック(34)を膨張させる。これにより、指圧子(106)が、足裏用底面エアバック(34)に形成された長孔(27)を出没する際に、指圧子(106)が圧迫され、また指圧子(106)の底面エアバッグ(34)の上面からの突び出し量が小さくなるため、マッサージを弱めることができる。
【0039】
また、マッサージを強めたいときは、足裏用底面エアバッグ(34)を収縮させる。これにより、指圧子(106)が長孔(27)を出没する際に、足裏用底面エアバック(34)の干渉を受けることなく、出没可能となり、また底面エアバッグ(34)上面からの突び出し量が大きくなるので、被施療者の患部に強いマッサージを施すことができる。
【0040】
<移動手段>
次に、足裏用マッサージ手段(50)を被施療者の患部に沿って前後に往復移動させる移動手段(40)について説明する。
【0041】
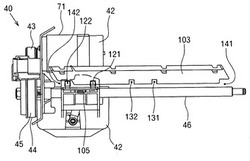
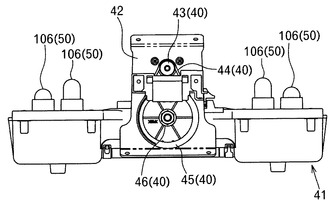
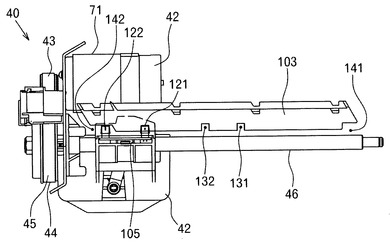
移動手段(40)は、ベースユニット(200)内に収容される。また、移動手段(40)は、図6及び図7に示すように、足裏用マッサージ手段(50)を収容するケーシング(41)と連結し、該ケーシング(41)を被施療者の患部を前後に移動可能にする。移動手段(40)は、駆動源となるモータ(42)と、プーリ(43)、ベルト(44)及びプーリ(45)からなる減速機構を有し、プーリ(45)には、本体ユニット(300)の凹部(20)の底面(23)の長手方向に沿って延びるネジ軸(46)が連結されている。ネジ軸(46)には、前記ケーシング(41)の略中央に形成されたナット部材(図示せず)が噛合している。
【0042】
移動手段(40)は、モータ(42)を正転又は逆転させることで、ネジ軸(46)が回転し、ネジ推力によりナット部材(図示せず)がネジ軸(46)上をスライドする結果、足裏用マッサージ手段(50)が凹部(20)の底面(23)に沿って前後に移動する。
【0043】
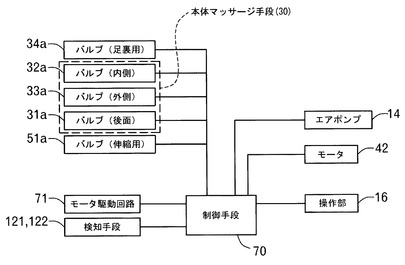
モータ(42)は、図11に示すように、マッサージ手段(30)の膨縮、並びにマッサージ手段(50)の移動やマッサージプログラムを制御する制御手段(70)と、該制御手段(70)に電気的に接続するモータ駆動回路(71)とを介して制御される。
【0044】
制御手段(70)は、ケーシング(41)内に具えられた後述する第1検知手段(121)と第2検知手段(122)と電気的に接続されており、第1検知手段(121)と第2検知手段(122)により、足裏用マッサージ手段(50)の位置を検知する。制御手段(70)は、第1検知手段(121)、第2検知手段(122)からの位置情報に基づいて、足裏用マッサージ手段(50)の移動を制御する。
【0045】
第1検知手段(121)は、図7で示すように、ケーシング(41)と一体に移動するスライダー(105)の前側に配備されており、第2検知手段(122)は、スライダーの後側に配備されている。
【0046】
検知手段(121)(122)により検知される被検知手段(131)(132)(141)(142)は、スライダー(105)の移行路に沿って形成された案内条(103)に配備されている。
【0047】
被検知手段(141)(142)は、図7に示すように、スライダー(105)の移行路の両端に形成される。移行路の前端には、被検知手段である前端切欠(141)が、移行路の後端には、被検知手段である後端切欠(142)が、形成される。また、移行路の略中央に、被検知手段である凹部(131)(132)が2カ所形成される。移行路の中央より前方寄りに前方凹部(131)が形成され、中央より後方寄りに後方凹部(132)が形成される。前方凹部(131)と後方凹部(132)の間隔は、第1検知手段(121)と第2検知手段(122)の設置された間隔に等しくなるように形成される。
【0048】
前端切欠(141)は、スライダー(105)が前端に移動したときに、第1検知手段(121)によって検知され、後端切欠(142)は、スライダー(105)が後端に移動したときに、第2検知手段(122)により検知される。
【0049】
前方凹部(131)と後方凹部(132)を、夫々第1検知手段(121)と第2検知手段(122)が同時に検知したときは、足裏用マッサージ手段(50)が、移行路の略中央(以下、ホームポジションとする)に位置している。
【0050】
検知手段(121)(122)は、足裏用マッサージ手段(50)と一体に移動可能となっており、被検知手段は、その移行路に接近した位置に配備される。
【0051】
いずれの検知手段(121)(122)も、前端切欠(141)又は後端切欠(142)の何れか、又は第1検知手段(121)と第2検知手段(122)が、夫々前方凹部(131)と後方凹部(132)を同時に検知すると、その検知情報を制御手段(70)へ送信する。
【0052】
足裏用マッサージ手段(50)の位置は、検知手段(121)(122)と、検知手段(121)(122)から検知される被検知手段(131)(132)(141)(142)とから検知することができる。検知手段(121)(122)として、光素子及び受光素子、マグネットセンサを例示できる。
【0053】
検知手段(121)(122)に光素子及び受光素子を用いた場合、被検知手段(131)(132)(141)(142)として、透光部を有する遮蔽板を例示できる。
【0054】
また、検知手段(121)(122)としてマグネットセンサを用いた場合、被検知手段(131)(132)(141)(142)としてマグネットを例示できる。
【0055】
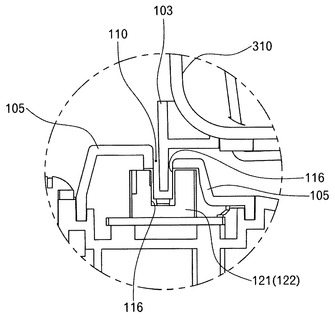
スライダー(105)は、図8の丸囲み部分の拡大図に最も良く表されているように、ケーシング(41)の上面に突設され、移動方向に平行な溝を有する凹部(110)の形成されたカバー体(116)を具える。
【0056】
カバー体(116)は、足裏用マッサージ手段(50)の移動方向である前後方向に長く形成されており、カバー体(116)内部前端に第1検知手段(121)を配備し、内部後端に第2検知手段(122)を配備する。該検知手段(121)(122)は、光素子及び受光素子のユニットを含む。案内条(103)は、本体ケーシング(310)の下面から下方に突出する薄板状のレールを例示できる。
【0057】
<位置検知>
案内条(103)に沿ってスライダー(105)が移動することで、足裏用マッサージ手段(50)が被施療者の患部を前後に移動する。足裏用マッサージ手段(50)が案内条(103)の最も前方まで移動したときは、第1検知手段(121)が前端切欠(141)を検知し、ケーシング(41)が前方向の移動限に達したことを制御手段(70)に送信する。
【0058】
また、足裏用マッサージ手段(50)が最も後方まで移動した場合には、第2検知手段(122)が後端の後端切欠(142)を検知し、足裏用マッサージ手段(50)が後方の移動限に達したことを制御手段(70)に送信する。
【0059】
また、足裏用マッサージ手段(50)が、案内条(103)の略中央を移動し、案内条(103)に形成された前方凹部(131)と後方凹部(132)を、夫々第1検知手段(121)と第2検知手段(122)が同時に検知したときは、足裏用マッサージ手段(50)が、移行路の略中央(ホームポジション)を移動しているとして、制御手段(70)に足裏用マッサージ手段(50)の位置情報を送信する。
【0060】
制御手段(70)は、これら検知手段(121)(122)から送信された位置情報に基づいて、移動手段(40)を制御し、マッサージプログラムの制御を行なう。
【0061】
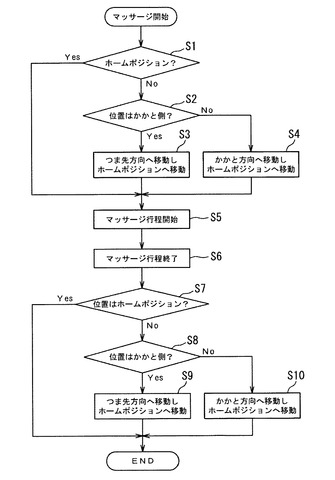
該制御手段(70)は、図12に示すように、マッサージプログラム開始時に、足裏用マッサージ手段(50)がホームポジションに位置すると判断したときには、マッサージプログラムを開始する。
【0062】
一方、前回のマッサージ終了時に、停電等により、足裏用マッサージ手段(50)が、ホームポジションに戻らずにマッサージを終了したときは、足裏用マッサージ手段(50)がホームポジションに位置していない。そのため、足裏用マッサージ手段(50)を、ホームポジションに移動させた後で、マッサージプログラムを開始させる(ステップ1)。
【0063】
例えば、足裏用マッサージ手段(50)が、ホームポジションより後方のかかと側に位置し、該位置情報を制御手段(70)に送信した状態で、マッサージを終了していたときは、マッサージプログラム開始時に、第1検知手段(121)と第2検知手段(122)が、夫々前方凹部(131)と後方凹部(132)を検知するまで、足裏用マッサージ手段(50)を案内条(103)の前方であるつま先側に移動させる(ステップ2及びステップ3)。足裏用マッサージ手段(50)が、ホームポジションまで移動し、検知手段(121)(122)が制御手段(70)に位置情報を送信してから、マッサージプログラムを開始する(ステップ5)。
【0064】
また、足裏用マッサージ手段(50)が、ホームポジションより前方のつま先側に位置し、該位置情報を制御手段(70)に送信した状態で、マッサージを終了していたときは、マッサージプログラム開始時に、第1検知手段(121)と第2検知手段(122)が、夫々前方凹部(131)と後方凹部(132)を検知するまで、足裏用マッサージ手段(50)を案内条(103)の後方であるかかと側に移動させる。足裏用マッサージ手段(50)が、ホームポジションまで移動し(ステップ4)、第1検知手段(121)と第2検知手段(122)が制御手段(70)に位置情報を送信してから、マッサージプログラムを開始する(ステップ5)。
【0065】
一方で、被施療者が、マッサージプログラムの途中でマッサージの終了を望むとき(ステップ6)は、足裏用マッサージ手段(50)がホームポジションに位置していないことが多い(ステップ7)。
【0066】
第2検知手段(122)が、後端切欠(142)に達した情報を送信し、足裏用マッサージ手段(50)がホームポジションよりかかと側に位置するときに、マッサージを終了させると、制御手段(70)が、足裏用マッサージ手段(50)の位置がホームポジションよりかかと側に位置していると判断して(ステップ8)、足裏用マッサージ手段(50)をつま先側に移動させる(ステップ9)。足裏用マッサージ手段(50)が、ホームポジションまで移動し、該位置情報を制御手段(70)に送信すると、制御手段(70)がマッサージプログラムを終了させる。また、足裏用マッサージ手段(50)が、ホームポジションよりつま先側に位置しているときは、足裏用マッサージ手段(50)をかかと側に移動させる(ステップ10)。足裏用マッサージ手段が、ホームポジションまで移動すると、マッサージプログラムが終了する。
【0067】
これにより、被施療者が、マッサージプログラムの途中で、マッサージを終了させるときも、足裏用マッサージ手段(50)を移行路の前端切欠まで移動させる必要がなく、マッサージ手段(50)を移行路略中央のホームポジションへ移動させ、マッサージプログラムを終了させることができる。
さらに、ホームポジションを被施療者の患部近傍に設定することで、マッサージプログラムの開始直後に、被施療者の患部にマッサージを施すことができる。
これにより、足裏用マッサージ手段(50)の無駄な移動を減らすことができる。
特に、ホームポジションをマッサージ効果の高い土踏まずに相当する位置に設定しておくことで、マッサージ開始時、足裏用マッサージ手段(50)の無駄な移動をせずに、土踏まずにマッサージを施すことができる。
【0068】
<速度調整>
次に、足裏用マッサージ手段(50)の移動速度の調整について説明する。
【0069】
足裏用マッサージ手段(50)の移動速度は、パルスカウントにより制御される。
本願では、パルスカウントは、モータ(42)の回転をフォトインタラプタ(図示せず)で検出し、モータ(42)1回転につき2パルスとカウントする。本マッサージャーに具えられた案内条(103)の長さを164.5mmとし、スライダー(105)は、1.75mm/1パルスで移動し、案内条(103)の前端切欠(141)から後端切欠(142)まで移動するには94パルスかかる、とする構成を例示する。
【0070】
第1検知手段(121)が、前端切欠(141)を検知するときを、パルス0とし、モータ(42)が正転し、パルスカウントが上昇するにつれて、足裏用マッサージ手段(50)がかかと方向に移動する。
また、モータ(42)が逆転し、足裏用マッサージ手段(50)をつま先側へ移動させるときは、パルスカウントが減少する。足裏用マッサージ手段(50)が案内条(103)の後端に位置するときをパルス94とし、足裏用マッサージ手段(50)が案内条(103)の前端に到達したときをパルス0と設定する。
【0071】
パルスカウントの設定方法は、これに限定されるものではなく、ホームポジションを基準として設定することもできる。
【0072】
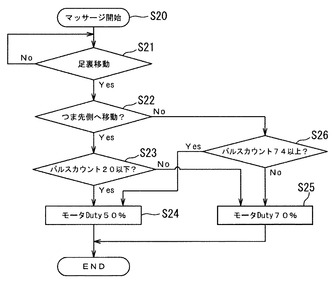
図13に示すように、マッサージプログラムを開始し(ステップ20)、足裏用マッサージ手段(50)の移動が開始すると(ステップ21)、パルスカウントが計測される。検知手段(121)(122)により、足裏用マッサージ手段(50)がつま先方向へ移動している(ステップ22)と判断し、かつパルスカウントが20以下のときは、制御手段(70)に該情報を送信し(ステップ23)、モータ(42)の回転を50%に低下させる(ステップ24)。これにより、足裏用マッサージ手段(50)の移動速度を減速させる。
足裏用マッサージ手段(50)が、移行路の前端に到達したときは、第1検知手段(121)が、案内条(103)の前端切欠(141)を検知する。第1検知手段(121)が、位置情報を制御手段(70)に送信し、足裏用マッサージ手段(50)の移動方向を反転させる。足裏用マッサージ手段(50)が、かかと方向へ移動するときは、ステップ26の判断により、モータ(42)の回転が70%となり、足裏用マッサージ手段(50)の移動を加速させる。
【0073】
足裏用マッサージ手段(50)が、かかと方向に向かって移動し、パルスカウントが74に到達したとき(ステップ26)は、該情報を制御手段(70)に送信し、モータ(42)の回転を遅くさせる(ステップ24)。該減速は、第2検知手段(122)が、後端切欠(142)を検知するまで行なわれる。
【0074】
従って、足裏用マッサージ手段(50)が移行路の前端又は後端近傍に接近すると、足裏用マッサージ手段(50)の移動を減速させる。これにより、足裏用マッサージ手段(50)の移行路上に異物が挟まったときなどに、移行路の前端又は後端に形成された開口(22)縁に衝突した異物から、足裏用マッサージ手段(50)への衝撃を和らげる。
【0075】
本発明のマッサージャー(10)の全ての制御は、制御手段(70)により行なわれる。制御手段(70)には、図11に示すように、エアポンプ(14)、バルブ(31a)(32a)(33a)(34a)(51a)、足裏用マッサージ手段(50)のモータ(42)、モータ駆動回路(71)、検知手段(121)(122)、ソレノイド(図示せず)等が電気的に接続される。さらに、制御手段は、被施療者の操作部(16)の操作に基づいて、予め設定された種々の動作、プログラムされたマッサージ行程に従って、各々の動作を制御する。
【0076】
制御手段(70)には、その他、上記動作を制御するためのプログラム等を記憶したメモリ(図示せず)等の種々の回路、電子部品等が接続されている。
【0077】
操作部(16)を操作して、被施療者が所望するマッサージ手段(30)(50)を作動させ、又は予めプログラムされたコースに従ってマッサージ手段(30)(50)を作動させることにより、足裏を含む足先やふくらはぎ、膝関節の周囲及び/又はふくらはぎの上部にマッサージを施すことができる。
なお、足裏用マッサージ手段(50)は、モータ(42)の正転、逆転のタイミングを検知手段(121)(122)から送信される信号に基づいて行なうこともできる。
【産業上の利用可能性】
【0078】
本発明は、マッサージ手段の無駄な移動を減らし、被施療者の患部に迅速にマッサージを施すことが可能なマッサージャーとして有用である。
【符号の説明】
【0079】
(10) マッサージャー
(30) 本体マッサージ手段
(31) 後面エアバッグ
(32) 内側エアバッグ
(33) 外側エアバッグ
(34) 底面エアバッグ
(40) 移動手段
(41) ケーシング
(42) モータ
(46) ネジ軸
(50) 足裏用マッサージ手段
(121) 第1検知手段
(122) 第2検知手段
(131) 前方凹部
(132) 後方凹部
(141) 前端切欠
(142) 後端切欠
(103) 案内条
(105) スライダー
(106) 指圧子
(107) 伸縮用エアバッグ
(110) 凹部
(116) カバー体
(200) ベースユニット
(210) ベースケーシング
(300) 本体ユニット
(310) 本体ケーシング
【技術分野】
【0001】
本発明は、被施療者の患部にマッサージを施すマッサージャーに関するものであり、具体的には、患部に沿って移動し、マッサージを施すマッサージ手段の位置を検知することのできるマッサージャーに関するものである。
【背景技術】
【0002】
被施療者の患部にマッサージを施すマッサージ手段を患部に沿って往復移動可能に具えたマッサージャーがある。この種のマッサージャーでは、マッサージ手段の移行路に検知手段を配備し、マッサージ手段の位置を検知するようにしている(例えば、特許文献1の段落0008、特許文献2の段落0025参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−161437号公報
【特許文献2】特開2000−167021号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
マッサージ手段がマッサージ中に患部から受ける応力やケーシング等のバラツキ、ガタ、経年劣化等により、マッサージ手段の移行路にずれが生じることがあった。その結果、検知手段が、マッサージ手段やケーシング等と接触して損傷することがあり、マッサージ手段の正確な位置等を検知できなくなる虞がある。
【0005】
また、検知手段及び/又は被検知手段は、一般的に移行路の両端に設けられる。従って、移行路中でマッサージ手段の移行を停止し、再度マッサージ手段を作動させる場合、マッサージ手段の位置を検知するために、一旦マッサージ手段を移行路の端部まで移動させる必要があった。
【0006】
同様に、マッサージ手段を停止させる場合、マッサージ手段の位置を検知するために、マッサージ手段を移行路端まで移動させている。このため、マッサージを開始する場合に、所望位置までマッサージ手段を移動させる必要があり、迅速にマッサージ開始を行なうことができなかった。
【0007】
本発明の目的は、マッサージ手段の位置を素早く検知することのできるマッサージャーを提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明のマッサージャーは、
被施療者の患部にマッサージを施すマッサージ手段と、
マッサージ手段を患部に沿って移動させる移動手段と、
を具えるマッサージャーにおいて、
マッサージ手段の移行路に沿って延びるように突設された案内条を有し、
マッサージ手段には、マッサージ手段と一体に移動可能なスライダーを具え、
スライダーに第1検知手段と第2検知手段を有し、
案内条に第1検知手段と第2検知手段により同時に検知可能な2つの被検知手段と、スライダーの移行路の両端に、前記2つの検知手段の何れか一方により検知され、スライダーが移行路端に達したことを検知する被検知手段を有する。
また、前記スライダーには、前記案内条を跨ぐ凹部を形成することが望ましい
【発明の効果】
【0009】
本発明のマッサージャーによれば、スライダーに第1検知手段と第2検知手段を設け、該第1検知手段と第2検知手段が同時に被検知手段を検知することで、マッサージ手段が特定の位置にあることを検出することができ、また、何れか一方の検知手段のみが被検知手段を検知したときには、マッサージ手段が移行路の前端又は後端の位置にあることを検出することができる。
【0010】
これにより、マッサージ手段の位置検出を素早く行なうことができ、上記特定の位置を被施療者の患部近傍に設定することで、マッサージプログラムを開始するときには、被施療者の患部近傍から、マッサージを行なうことが可能である。このため、マッサージ開始時及び終了時に、マッサージ手段の無駄な移動を減らすことが可能である。
【0011】
また、スライダーに案内条を跨ぐ凹部を形成することにより、マッサージ手段を移動させると、スライダーは、凹部が案内条に跨った状態で移動するから、スライダーの移行路から案内条が外れることはない。
従って、スライダーに配備された検知手段が、案内条に配備された被検知手段と衝突等することを防止できる。
特に、マッサージ手段がマッサージ中に患部から受ける応力やケーシング等のバラツキ、ガタ、経年劣化等により、変形や歪みなどがあった場合でも、検知手段を保護することができ、正確なマッサージ手段の位置検知を行うことができる。
【図面の簡単な説明】
【0012】
【図1】図1は、本発明のマッサージャーを斜め前方から見た斜視図である。
【図2】図2は、図1の線A―Aに沿うマッサージャーの断面図である。
【図3】図3は、本発明のマッサージャーの側面断面図である。
【図4】図4は、後面エアバックを抜き出した状態のマッサージャーの平面図である。
【図5】図5は、後面エアバッグを抜き出した状態のマッサージャーの側面図である。
【図6】図6は、移動手段を取り付けた状態のケーシングの背面図である。
【図7】図7は、案内条に沿う検知手段の側面図である。
【図8】図8は、足裏用マッサージ手段を斜め前方から見た斜視図である。
【図9】図9は、図8のケーシングを、指圧子を含む面で切断して示す断面図である。
【図10】図10は、案内条とスライダーの拡大図である。
【図11】図11は、本発明のマッサージャーの制御ブロック図である。
【図12】図12は、移動手段の移動を制御するフローチャートである。
【図13】図13は、移動手段の速度を制御するフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明を、脚部にマッサージを施すマッサージャー(10)に適用した例について説明するが、本発明は、脚部用のマッサージャー(10)に限定されるものではなく、例えば被施療者の上半身や腕などの患部に沿って移動可能にマッサージを施すマッサージャーにも適用できる。
図1は、本発明を適用することのできるマッサージャー(10)の一例を示している。図1は、マッサージャー(10)を斜め前方から見た斜視図である。
【0014】
マッサージャー(10)は、床面に載置されるベースユニット(200)に被施療者の足先とふくらはぎをマッサージする本体ユニット(300)を搭載したものである。
【0015】
本発明において、大腿とは脚部の膝よりも上の部分、膝関節とは膝の屈折部分及びその周辺、ふくらはぎとは膝と足首の間であって、脛の裏側部分、足先とはくるぶしよりも下の部分を意味する。
【0016】
ベースユニット(200)は、内部中空の樹脂製のベースケーシング(210)から形成され、上部にて本体ユニット(300)を支持し、下面にて安定してマッサージャー(10)を床面に載置する。ベースケーシング(210)の内部には、エアポンプ(14)(図11参照)、制御基板(図示せず)、商業電源(図示せず)へ接続するための電源ユニット等が収容される。
【0017】
また、ベースユニット(200)内部には、図2に示すように、被施療者の足裏をマッサージするための足裏用マッサージ手段(50)を有するケーシング(41)を収納する。ベースユニット(200)内部には、ケーシング(41)と連結し、マッサージ手段(50)を被施療者の患部を前後に移動可能にする移動手段(40)を具える。足裏用マッサージ手段(50)として、本体ユニット(300)の底面(23)から臨出可能な指圧子(106)を挙げることができる。足裏用マッサージ手段(50)を移動させる移動手段(40)については、後述する。
【0018】
ベースユニット(200)には、本体ユニット(300)を揺動可能に載置するためのリクライニング機構(400)を配備することができる。
【0019】
リクライニング機構(400)として、図3に示すように、ベースケーシング(210)の上面左右に形成された円弧状のベース側ガイド(61)と、該ベース側ガイド(61)の後方端に配備されたベース側ローラ(62)を有する。
【0020】
また、図3に示すように、本体ユニット(300)には、円弧状の本体ユニット側ガイド(63)と本体ユニット側ローラ(64)を有しており、本体ユニット側ガイド(63)に、前記ベースユニット側ローラ(62)が嵌まり、前記ベースユニット側ガイド(61)に本体ユニット側ローラ(64)が嵌まっている。
【0021】
本体ユニット(300)を後方に向けて傾けると、ベースユニット側ガイド(61)を本体ユニット側ローラ(64)が転動し、本体ユニット側ガイド(63)をベースユニット側ローラ(62)が転動することで、本体ユニット(300)は、ベースユニット(200)に対してリクライニングする。
【0022】
本体ユニット(300)は、内部中空の樹脂製の本体ケーシング(310)を有している。本体ユニット(300)には、被施療者の足先及び/又はふくらはぎをマッサージする本体マッサージ手段(30)が配備される。本体ケーシング(310)は、ベースユニット(200)に対してリクライニング可能に配備することもできるし、固定して配備することもできる。
【0023】
本体ユニット(300)は、図1に示すように、下側が前方に向けて突出し、後側が上向きに突出して、被施療者の足先及びふくらはぎが挿入可能な左右一対の凹部(20)(20)を形成している。凹部(20)(20)は、図1に示すように、本体ユニット(300)がベースユニット(200)に対してほぼ垂直に立設した状態で、底面(23)が床面とほぼ平行となり、底面(23)の後端から上方に向けてほぼ垂直に後面(24)を有し、底面(23)と後面(24)の側部を結ぶように内側面(25)と外側面(26)を有しており、前方及び上方が開口した形状を例示できる。
【0024】
また、凹部(20)の底面(23)には、図2に示すように、足裏用マッサージ手段(50)である指圧子(106)が、被施療者の患部を前後方向に移動可能かつ臨出可能に、開口(22)が形成されている。
【0025】
本体ユニット(300)に被施療者が足を挿入したときに、凹部(20)(20)の底面(23)(23)には、被施療者の足裏が当接し、凹部(20)(20)の後面(24)(24)にはふくらはぎが当接し、内側面(25)(25)及び外側面(26)(26)には、ふくらはぎの内側及び外側が夫々当接又は近接する。
【0026】
本体ユニット(300)には、凹部(20)(20)に本体マッサージ手段(30)が配備される。本体マッサージ手段(30)として、ふくらはぎ用の内側エアバッグ(32)、外側エアバッグ(33)、ふくらはぎ用後面エアバッグ(31)、及び足裏をマッサージする足裏用底面エアバッグ(34)が配備されている。
【0027】
ふくらはぎ用内側エアバッグ(32)は、図1に示すように、前記凹部(20)の内側面(25)に配備され、ふくらはぎ用外側エアバッグ(33)は、凹部(20)の外側面(26)に配備される。また、ふくらはぎ用後面エアバッグ(31)は、凹部(20)の後面(24)に配備され、足裏用底面エアバッグ(34)は、凹部(20)の底面(23)に配備される。各エアバッグ(31)(32)(33)(34)は、電磁バルブ(31a)(32a)(33a)(34a)を介してエアポンプ(14)に連繋されている。
【0028】
ふくらはぎ用後面エアバッグ(31)は、エアポンプ(14)からの電磁バルブ(31a)を介した空気供給部(14a)と連繋している。空気供給部(14a)は、本体ユニット(300)内の上部に位置している。ふくらはぎ用後面エアバッグ(31)は、空気供給部(14a)を回転軸として、回転することができる。図4及び図5に示すように、空気供給部(14a)と一緒にふくらはぎ用後面エアバッグ(31)を、本体ユニット(300)上部に具えた取出孔(35)から引き出し、被施療者の座る椅子に載置させ、被施療者の太腿裏部へ配置することが可能である。
【0029】
また、本体ユニット(300)をリクライニングさせた状態で、ふくらはぎ用後面エアバッグ(31)を引き出すことにより、被施療者が仰向けになった状態で、ふくらはぎ用後面エアバッグ(31)を被施療者の大腿裏部へ配置することも可能である。
【0030】
これにより、本マッサージャー(10)のように、大腿用のマッサージ手段を有さないマッサージャー(10)であっても、ふくらはぎから大腿にかけて、被施療者の患部を広い範囲でマッサージすることができる。
【0031】
足裏用底面エアバッグ(34)は、図4に示すように、本体ユニット(300)の凹部(20)の底面(23)から臨出する指圧子(106)の移動方向に沿って、前後方向に指圧子(106)が移動可能かつ臨出可能な長孔(27)を形成する。
【0032】
足裏用底面エアバッグ(34)に形成された長孔(27)を指圧子(106)が貫通して、被施療者の足裏にマッサージを施すことができる。
【0033】
指圧子(106)は、図2及び図9に示すように、指圧子(106)の基端側に具えた伸縮用エアバッグ(107)と連結される。伸縮用エアバッグ(107)は、電磁バルブ(51a)を介してエアポンプ(14)と連結される。バルブ(51a)は制御手段(70)により動作を制御される。
【0034】
指圧子(106)は、伸縮用エアバッグ(107)を膨張、収縮又は膨張させておくことで、凹部(20)の底面(23)に形成された開口(22)より出没又は突出した状態で前後に移動し、被施療者の足裏に押圧や指圧の如きマッサージを施すことができる。
【0035】
また、指圧子(106)は、ソレノイド機構(図示せず)を具えることが可能である。指圧子(106)が左右に振動可能に配備されることにより、被施療者の足裏へ、押圧によるマッサージだけでなく、横方向への振動マッサージを施すことが可能である。
【0036】
これにより、被施療者の足裏に、指圧子(106)を用いて、振動マッサージを施すことができる。
【0037】
凹部(20)の底面(23)には、指圧子(106)と被施療者の足裏の間に足裏用底面エアバッグ(34)が配置される。足裏用底面エアバッグ(34)には、指圧子(106)が貫通するために、被施療者の患部に沿った長孔(27)が形成されている。該足裏用底面エアバッグ(34)を膨縮させることにより、指圧子(106)の押圧による足裏へのマッサージの強弱を調整することが可能である。
【0038】
指圧子(106)の押圧によるマッサージの調節方法として、マッサージを弱めたいときは、指圧子(106)と被施療者の足裏の間に配置した足裏用底面エアバック(34)を膨張させる。これにより、指圧子(106)が、足裏用底面エアバック(34)に形成された長孔(27)を出没する際に、指圧子(106)が圧迫され、また指圧子(106)の底面エアバッグ(34)の上面からの突び出し量が小さくなるため、マッサージを弱めることができる。
【0039】
また、マッサージを強めたいときは、足裏用底面エアバッグ(34)を収縮させる。これにより、指圧子(106)が長孔(27)を出没する際に、足裏用底面エアバック(34)の干渉を受けることなく、出没可能となり、また底面エアバッグ(34)上面からの突び出し量が大きくなるので、被施療者の患部に強いマッサージを施すことができる。
【0040】
<移動手段>
次に、足裏用マッサージ手段(50)を被施療者の患部に沿って前後に往復移動させる移動手段(40)について説明する。
【0041】
移動手段(40)は、ベースユニット(200)内に収容される。また、移動手段(40)は、図6及び図7に示すように、足裏用マッサージ手段(50)を収容するケーシング(41)と連結し、該ケーシング(41)を被施療者の患部を前後に移動可能にする。移動手段(40)は、駆動源となるモータ(42)と、プーリ(43)、ベルト(44)及びプーリ(45)からなる減速機構を有し、プーリ(45)には、本体ユニット(300)の凹部(20)の底面(23)の長手方向に沿って延びるネジ軸(46)が連結されている。ネジ軸(46)には、前記ケーシング(41)の略中央に形成されたナット部材(図示せず)が噛合している。
【0042】
移動手段(40)は、モータ(42)を正転又は逆転させることで、ネジ軸(46)が回転し、ネジ推力によりナット部材(図示せず)がネジ軸(46)上をスライドする結果、足裏用マッサージ手段(50)が凹部(20)の底面(23)に沿って前後に移動する。
【0043】
モータ(42)は、図11に示すように、マッサージ手段(30)の膨縮、並びにマッサージ手段(50)の移動やマッサージプログラムを制御する制御手段(70)と、該制御手段(70)に電気的に接続するモータ駆動回路(71)とを介して制御される。
【0044】
制御手段(70)は、ケーシング(41)内に具えられた後述する第1検知手段(121)と第2検知手段(122)と電気的に接続されており、第1検知手段(121)と第2検知手段(122)により、足裏用マッサージ手段(50)の位置を検知する。制御手段(70)は、第1検知手段(121)、第2検知手段(122)からの位置情報に基づいて、足裏用マッサージ手段(50)の移動を制御する。
【0045】
第1検知手段(121)は、図7で示すように、ケーシング(41)と一体に移動するスライダー(105)の前側に配備されており、第2検知手段(122)は、スライダーの後側に配備されている。
【0046】
検知手段(121)(122)により検知される被検知手段(131)(132)(141)(142)は、スライダー(105)の移行路に沿って形成された案内条(103)に配備されている。
【0047】
被検知手段(141)(142)は、図7に示すように、スライダー(105)の移行路の両端に形成される。移行路の前端には、被検知手段である前端切欠(141)が、移行路の後端には、被検知手段である後端切欠(142)が、形成される。また、移行路の略中央に、被検知手段である凹部(131)(132)が2カ所形成される。移行路の中央より前方寄りに前方凹部(131)が形成され、中央より後方寄りに後方凹部(132)が形成される。前方凹部(131)と後方凹部(132)の間隔は、第1検知手段(121)と第2検知手段(122)の設置された間隔に等しくなるように形成される。
【0048】
前端切欠(141)は、スライダー(105)が前端に移動したときに、第1検知手段(121)によって検知され、後端切欠(142)は、スライダー(105)が後端に移動したときに、第2検知手段(122)により検知される。
【0049】
前方凹部(131)と後方凹部(132)を、夫々第1検知手段(121)と第2検知手段(122)が同時に検知したときは、足裏用マッサージ手段(50)が、移行路の略中央(以下、ホームポジションとする)に位置している。
【0050】
検知手段(121)(122)は、足裏用マッサージ手段(50)と一体に移動可能となっており、被検知手段は、その移行路に接近した位置に配備される。
【0051】
いずれの検知手段(121)(122)も、前端切欠(141)又は後端切欠(142)の何れか、又は第1検知手段(121)と第2検知手段(122)が、夫々前方凹部(131)と後方凹部(132)を同時に検知すると、その検知情報を制御手段(70)へ送信する。
【0052】
足裏用マッサージ手段(50)の位置は、検知手段(121)(122)と、検知手段(121)(122)から検知される被検知手段(131)(132)(141)(142)とから検知することができる。検知手段(121)(122)として、光素子及び受光素子、マグネットセンサを例示できる。
【0053】
検知手段(121)(122)に光素子及び受光素子を用いた場合、被検知手段(131)(132)(141)(142)として、透光部を有する遮蔽板を例示できる。
【0054】
また、検知手段(121)(122)としてマグネットセンサを用いた場合、被検知手段(131)(132)(141)(142)としてマグネットを例示できる。
【0055】
スライダー(105)は、図8の丸囲み部分の拡大図に最も良く表されているように、ケーシング(41)の上面に突設され、移動方向に平行な溝を有する凹部(110)の形成されたカバー体(116)を具える。
【0056】
カバー体(116)は、足裏用マッサージ手段(50)の移動方向である前後方向に長く形成されており、カバー体(116)内部前端に第1検知手段(121)を配備し、内部後端に第2検知手段(122)を配備する。該検知手段(121)(122)は、光素子及び受光素子のユニットを含む。案内条(103)は、本体ケーシング(310)の下面から下方に突出する薄板状のレールを例示できる。
【0057】
<位置検知>
案内条(103)に沿ってスライダー(105)が移動することで、足裏用マッサージ手段(50)が被施療者の患部を前後に移動する。足裏用マッサージ手段(50)が案内条(103)の最も前方まで移動したときは、第1検知手段(121)が前端切欠(141)を検知し、ケーシング(41)が前方向の移動限に達したことを制御手段(70)に送信する。
【0058】
また、足裏用マッサージ手段(50)が最も後方まで移動した場合には、第2検知手段(122)が後端の後端切欠(142)を検知し、足裏用マッサージ手段(50)が後方の移動限に達したことを制御手段(70)に送信する。
【0059】
また、足裏用マッサージ手段(50)が、案内条(103)の略中央を移動し、案内条(103)に形成された前方凹部(131)と後方凹部(132)を、夫々第1検知手段(121)と第2検知手段(122)が同時に検知したときは、足裏用マッサージ手段(50)が、移行路の略中央(ホームポジション)を移動しているとして、制御手段(70)に足裏用マッサージ手段(50)の位置情報を送信する。
【0060】
制御手段(70)は、これら検知手段(121)(122)から送信された位置情報に基づいて、移動手段(40)を制御し、マッサージプログラムの制御を行なう。
【0061】
該制御手段(70)は、図12に示すように、マッサージプログラム開始時に、足裏用マッサージ手段(50)がホームポジションに位置すると判断したときには、マッサージプログラムを開始する。
【0062】
一方、前回のマッサージ終了時に、停電等により、足裏用マッサージ手段(50)が、ホームポジションに戻らずにマッサージを終了したときは、足裏用マッサージ手段(50)がホームポジションに位置していない。そのため、足裏用マッサージ手段(50)を、ホームポジションに移動させた後で、マッサージプログラムを開始させる(ステップ1)。
【0063】
例えば、足裏用マッサージ手段(50)が、ホームポジションより後方のかかと側に位置し、該位置情報を制御手段(70)に送信した状態で、マッサージを終了していたときは、マッサージプログラム開始時に、第1検知手段(121)と第2検知手段(122)が、夫々前方凹部(131)と後方凹部(132)を検知するまで、足裏用マッサージ手段(50)を案内条(103)の前方であるつま先側に移動させる(ステップ2及びステップ3)。足裏用マッサージ手段(50)が、ホームポジションまで移動し、検知手段(121)(122)が制御手段(70)に位置情報を送信してから、マッサージプログラムを開始する(ステップ5)。
【0064】
また、足裏用マッサージ手段(50)が、ホームポジションより前方のつま先側に位置し、該位置情報を制御手段(70)に送信した状態で、マッサージを終了していたときは、マッサージプログラム開始時に、第1検知手段(121)と第2検知手段(122)が、夫々前方凹部(131)と後方凹部(132)を検知するまで、足裏用マッサージ手段(50)を案内条(103)の後方であるかかと側に移動させる。足裏用マッサージ手段(50)が、ホームポジションまで移動し(ステップ4)、第1検知手段(121)と第2検知手段(122)が制御手段(70)に位置情報を送信してから、マッサージプログラムを開始する(ステップ5)。
【0065】
一方で、被施療者が、マッサージプログラムの途中でマッサージの終了を望むとき(ステップ6)は、足裏用マッサージ手段(50)がホームポジションに位置していないことが多い(ステップ7)。
【0066】
第2検知手段(122)が、後端切欠(142)に達した情報を送信し、足裏用マッサージ手段(50)がホームポジションよりかかと側に位置するときに、マッサージを終了させると、制御手段(70)が、足裏用マッサージ手段(50)の位置がホームポジションよりかかと側に位置していると判断して(ステップ8)、足裏用マッサージ手段(50)をつま先側に移動させる(ステップ9)。足裏用マッサージ手段(50)が、ホームポジションまで移動し、該位置情報を制御手段(70)に送信すると、制御手段(70)がマッサージプログラムを終了させる。また、足裏用マッサージ手段(50)が、ホームポジションよりつま先側に位置しているときは、足裏用マッサージ手段(50)をかかと側に移動させる(ステップ10)。足裏用マッサージ手段が、ホームポジションまで移動すると、マッサージプログラムが終了する。
【0067】
これにより、被施療者が、マッサージプログラムの途中で、マッサージを終了させるときも、足裏用マッサージ手段(50)を移行路の前端切欠まで移動させる必要がなく、マッサージ手段(50)を移行路略中央のホームポジションへ移動させ、マッサージプログラムを終了させることができる。
さらに、ホームポジションを被施療者の患部近傍に設定することで、マッサージプログラムの開始直後に、被施療者の患部にマッサージを施すことができる。
これにより、足裏用マッサージ手段(50)の無駄な移動を減らすことができる。
特に、ホームポジションをマッサージ効果の高い土踏まずに相当する位置に設定しておくことで、マッサージ開始時、足裏用マッサージ手段(50)の無駄な移動をせずに、土踏まずにマッサージを施すことができる。
【0068】
<速度調整>
次に、足裏用マッサージ手段(50)の移動速度の調整について説明する。
【0069】
足裏用マッサージ手段(50)の移動速度は、パルスカウントにより制御される。
本願では、パルスカウントは、モータ(42)の回転をフォトインタラプタ(図示せず)で検出し、モータ(42)1回転につき2パルスとカウントする。本マッサージャーに具えられた案内条(103)の長さを164.5mmとし、スライダー(105)は、1.75mm/1パルスで移動し、案内条(103)の前端切欠(141)から後端切欠(142)まで移動するには94パルスかかる、とする構成を例示する。
【0070】
第1検知手段(121)が、前端切欠(141)を検知するときを、パルス0とし、モータ(42)が正転し、パルスカウントが上昇するにつれて、足裏用マッサージ手段(50)がかかと方向に移動する。
また、モータ(42)が逆転し、足裏用マッサージ手段(50)をつま先側へ移動させるときは、パルスカウントが減少する。足裏用マッサージ手段(50)が案内条(103)の後端に位置するときをパルス94とし、足裏用マッサージ手段(50)が案内条(103)の前端に到達したときをパルス0と設定する。
【0071】
パルスカウントの設定方法は、これに限定されるものではなく、ホームポジションを基準として設定することもできる。
【0072】
図13に示すように、マッサージプログラムを開始し(ステップ20)、足裏用マッサージ手段(50)の移動が開始すると(ステップ21)、パルスカウントが計測される。検知手段(121)(122)により、足裏用マッサージ手段(50)がつま先方向へ移動している(ステップ22)と判断し、かつパルスカウントが20以下のときは、制御手段(70)に該情報を送信し(ステップ23)、モータ(42)の回転を50%に低下させる(ステップ24)。これにより、足裏用マッサージ手段(50)の移動速度を減速させる。
足裏用マッサージ手段(50)が、移行路の前端に到達したときは、第1検知手段(121)が、案内条(103)の前端切欠(141)を検知する。第1検知手段(121)が、位置情報を制御手段(70)に送信し、足裏用マッサージ手段(50)の移動方向を反転させる。足裏用マッサージ手段(50)が、かかと方向へ移動するときは、ステップ26の判断により、モータ(42)の回転が70%となり、足裏用マッサージ手段(50)の移動を加速させる。
【0073】
足裏用マッサージ手段(50)が、かかと方向に向かって移動し、パルスカウントが74に到達したとき(ステップ26)は、該情報を制御手段(70)に送信し、モータ(42)の回転を遅くさせる(ステップ24)。該減速は、第2検知手段(122)が、後端切欠(142)を検知するまで行なわれる。
【0074】
従って、足裏用マッサージ手段(50)が移行路の前端又は後端近傍に接近すると、足裏用マッサージ手段(50)の移動を減速させる。これにより、足裏用マッサージ手段(50)の移行路上に異物が挟まったときなどに、移行路の前端又は後端に形成された開口(22)縁に衝突した異物から、足裏用マッサージ手段(50)への衝撃を和らげる。
【0075】
本発明のマッサージャー(10)の全ての制御は、制御手段(70)により行なわれる。制御手段(70)には、図11に示すように、エアポンプ(14)、バルブ(31a)(32a)(33a)(34a)(51a)、足裏用マッサージ手段(50)のモータ(42)、モータ駆動回路(71)、検知手段(121)(122)、ソレノイド(図示せず)等が電気的に接続される。さらに、制御手段は、被施療者の操作部(16)の操作に基づいて、予め設定された種々の動作、プログラムされたマッサージ行程に従って、各々の動作を制御する。
【0076】
制御手段(70)には、その他、上記動作を制御するためのプログラム等を記憶したメモリ(図示せず)等の種々の回路、電子部品等が接続されている。
【0077】
操作部(16)を操作して、被施療者が所望するマッサージ手段(30)(50)を作動させ、又は予めプログラムされたコースに従ってマッサージ手段(30)(50)を作動させることにより、足裏を含む足先やふくらはぎ、膝関節の周囲及び/又はふくらはぎの上部にマッサージを施すことができる。
なお、足裏用マッサージ手段(50)は、モータ(42)の正転、逆転のタイミングを検知手段(121)(122)から送信される信号に基づいて行なうこともできる。
【産業上の利用可能性】
【0078】
本発明は、マッサージ手段の無駄な移動を減らし、被施療者の患部に迅速にマッサージを施すことが可能なマッサージャーとして有用である。
【符号の説明】
【0079】
(10) マッサージャー
(30) 本体マッサージ手段
(31) 後面エアバッグ
(32) 内側エアバッグ
(33) 外側エアバッグ
(34) 底面エアバッグ
(40) 移動手段
(41) ケーシング
(42) モータ
(46) ネジ軸
(50) 足裏用マッサージ手段
(121) 第1検知手段
(122) 第2検知手段
(131) 前方凹部
(132) 後方凹部
(141) 前端切欠
(142) 後端切欠
(103) 案内条
(105) スライダー
(106) 指圧子
(107) 伸縮用エアバッグ
(110) 凹部
(116) カバー体
(200) ベースユニット
(210) ベースケーシング
(300) 本体ユニット
(310) 本体ケーシング
【特許請求の範囲】
【請求項1】
被施療者の患部にマッサージを施すマッサージ手段と、
マッサージ手段を患部に沿って移動させる移動手段と、を具えるマッサージャーにおいて、
マッサージ手段の移行路に沿って延びるように突設された案内条を有し、
マッサージ手段には、マッサージ手段と一体に移動可能なスライダーを具え、
スライダーに第1検知手段と第2検知手段を有し、
案内条に第1検知手段と第2検知手段により同時に検知可能な2つの被検知手段と、スライダーの移行路の両端に、前記第1検知手段と第2検知手段の何れか一方により検知され、スライダーが移行路端に達したことを検知する被検知手段を有する、
ことを特徴とするマッサージャー。
【請求項2】
前記スライダーには、前記案内条を跨ぐ凹部を形成した請求項1に記載のマッサージャー。
【請求項3】
被検知手段は、スライダーの移行路の略中間位置に設けられる請求項1又は2に記載のマッサージャー。
【請求項4】
第1検知手段と第2検知手段は、スライダーに配備されたカバー体の内部に収容される請求項1乃至請求項3の何れかに記載のマッサージャー。
【請求項1】
被施療者の患部にマッサージを施すマッサージ手段と、
マッサージ手段を患部に沿って移動させる移動手段と、を具えるマッサージャーにおいて、
マッサージ手段の移行路に沿って延びるように突設された案内条を有し、
マッサージ手段には、マッサージ手段と一体に移動可能なスライダーを具え、
スライダーに第1検知手段と第2検知手段を有し、
案内条に第1検知手段と第2検知手段により同時に検知可能な2つの被検知手段と、スライダーの移行路の両端に、前記第1検知手段と第2検知手段の何れか一方により検知され、スライダーが移行路端に達したことを検知する被検知手段を有する、
ことを特徴とするマッサージャー。
【請求項2】
前記スライダーには、前記案内条を跨ぐ凹部を形成した請求項1に記載のマッサージャー。
【請求項3】
被検知手段は、スライダーの移行路の略中間位置に設けられる請求項1又は2に記載のマッサージャー。
【請求項4】
第1検知手段と第2検知手段は、スライダーに配備されたカバー体の内部に収容される請求項1乃至請求項3の何れかに記載のマッサージャー。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−231883(P2012−231883A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−101272(P2011−101272)
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]