
マッサージ機及びマッサージシステム
【課題】使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現可能とさせる。
【解決手段】使用者の被施療部に接触させる施療子6にマッサージ動作を行わせる機械本体ユニット5、機械本体ユニット5の動作を制御する制御装置18と、使用者の脳波を取得する脳波取得装置9とを備えている。制御装置18は、施療子6が被施療部に接触している際の情報に基づいて当該被施療部の皮膚弾性特性を推定する。被施療部の皮膚弾性特性と施療子を当該被施療部に接触させる接触力との関係についての参照情報が記憶されており、推定された皮膚弾性特性と前記参照情報とに基づいて前記接触力を求める。求められた接触力によりマッサージ動作が行われた際に、取得された脳波に基づいて当該マッサージ動作の適否を推定し、この推定結果に基づいて前記参照情報を更新する。
【解決手段】使用者の被施療部に接触させる施療子6にマッサージ動作を行わせる機械本体ユニット5、機械本体ユニット5の動作を制御する制御装置18と、使用者の脳波を取得する脳波取得装置9とを備えている。制御装置18は、施療子6が被施療部に接触している際の情報に基づいて当該被施療部の皮膚弾性特性を推定する。被施療部の皮膚弾性特性と施療子を当該被施療部に接触させる接触力との関係についての参照情報が記憶されており、推定された皮膚弾性特性と前記参照情報とに基づいて前記接触力を求める。求められた接触力によりマッサージ動作が行われた際に、取得された脳波に基づいて当該マッサージ動作の適否を推定し、この推定結果に基づいて前記参照情報を更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マッサージ機及びマッサージシステムに関する。
【背景技術】
【0002】
施療子等のマッサージ具を有するマッサージ機には、その効果を高めるために、マッサージ具による負荷の強弱を調整できるものがある。負荷の強弱を調整するためには、例えば施療子の押出量を変更すればよく、施療子を使用者側へ大きく押し出すことで強いマッサージが得られ、施療子の押出量を小さくすることで弱いマッサージが得られる。
【0003】
しかし、マッサージ感は、施療子の押出量だけでなく、使用者の身体のマッサージされる部位(被施療部)の状態にも影響する。すなわち、比較的柔らかい(皮膚弾性が小さい)被施療部に対してマッサージする場合、柔らかく弾性のある施療子でマッサージすべきである。そうしなければ、実際に施療子から被施療部に与えられる力は、予期した力より過大となり、使用者にとっては強いマッサージとなる。
一方、比較的硬い(皮膚弾性が大きい)被施療部に対してマッサージする場合、硬い施療子でマッサージすべきである。そうしなければ、実際に施療子から被施療部に与えられる力は、予期した力より過小となり、使用者にとっては弱いマッサージとなる。
【0004】
しかし、施療子を柔らかくしたり硬くしたりすることは、施療子の交換を伴うため、現実的ではない。そこで、施療子を柔らかくしたり硬くしたりすることと等価な手段として、特許文献1に記載のマッサージ機がある。
このマッサージ機では、施療子の変位情報に基づいて被施療部の皮膚弾性特性を推定し、この推定した皮膚弾性特性と、所定の参照情報(参照データベース)とに基づいて、被施療部に施療子を接触させる力(目標接触力)を求めている。そして、この力に相当する出力でマッサージ動作を施療子に実行させる。
【0005】
前記所定の参照情報は、被施療部の皮膚弾性特性と、その皮膚弾性特性である場合に使用者が快適であると感じるであろう接触力との関係を表したデータベースである。つまり、参照情報は、皮膚弾性特性が判ればそれに適した接触力を求めることができるように、予め設定されマッサージ機に記憶させた情報である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−93404号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前記参照情報は、被施療部の皮膚弾性特性と、当該被施療部に施療子を接触させた際に快適であると感じるであろう接触力との関係を、例えば代表的な複数の使用者から取得し平均化して求めることができる。しかし、この参照情報は、あくまでも代表的な複数の使用者から求められたに過ぎず、万人に最適であるとは言えない。
また、マッサージ機の使用者が限定的である場合、当該使用者それぞれの参照情報を取得し、それをマッサージ機に記憶させてもよい。しかし、この場合、新たに使用者が増えると、その使用者に適合する参照情報が存在しているか否かは定かではない。
【0008】
そこで、使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現することが可能となるマッサージ機及びマッサージシステムを提供することを目的とする。
【課題を解決するための手段】
【0009】
(1)本発明のマッサージ機は、使用者の被施療部に接触させるマッサージ具を有し当該マッサージ具にマッサージ動作を行わせるマッサージ機構部と、前記マッサージ機構部の動作を制御する制御部と、前記使用者の脳波を取得する脳波取得部とを備え、前記制御部は、前記マッサージ機構部の一部が前記被施療部に接触している際の情報に基づいて当該被施療部の弾性特性を推定する弾性特性推定部と、被施療部の弾性特性と前記マッサージ具を当該被施療部に接触させる接触力との関係についての参照情報を記憶している記憶部と、前記弾性特性推定部によって推定された弾性特性と前記参照情報とに基づいて前記接触力を求める調整部と、前記調整部によって求められた前記接触力により前記マッサージ動作が行われた際に、前記脳波取得部から取得された脳波に基づいて当該マッサージ動作の適否を推定する適否推定部と、前記適否推定部による推定結果に基づいて前記参照情報を更新する更新部とを有していることを特徴とする。
【0010】
本発明によれば、弾性特性推定部が、使用者の被施療部の弾性特性を推定すると、調整部は、推定された弾性特性と記憶部が記憶している参照情報とに基づいて、マッサージ具を当該被施療部に接触させる接触力を求める。この際、ある使用者にとって、推定された弾性特性と前記参照情報とに基づいて求められた接触力が、相応しくない場合もあり得る。しかし、このような場合であっても、当該接触力によりマッサージ動作が行われた際に脳波取得部によって取得された前記ある使用者の脳波に基づいて、適否推定部が当該マッサージ動作の適否を推定し、その推定結果に基づいて更新部が参照情報を更新する。このため、その後、調整部によって求められる接触力は、更新された参照情報に基づいて求められるので、相応しい接触力に近づけることが可能となる。
【0011】
このように、被施療部の弾性特性と接触力との関係についての参照情報が、始めは、ある使用者に対して適していなくても、当該参照情報を、当該ある使用者に適合するように更新することができ、使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現することが可能となる。
なお、ある使用者にとって、推定された弾性特性と参照情報とに基づいて求められた接触力が、相応しくないことが生じる原因としては、例えば、使用者の体格差(太っている・痩せている等の身体的特徴差)が存在するためや、同じ使用者であってもマッサージ機を使用する日の体調差によるためであると考えられる。
【0012】
また、前記のとおり、適否推定部は、取得された使用者の脳波に基づいてマッサージ動作の適否を推定するが、一般的に脳波は使用者毎に出力特性が異なるため、推定結果に誤差が生じる場合もある。
(2)そこで、前記適否推定部は、脳波の出力特性についての相関に基づいて分類された複数のクラスそれぞれに対応付けられた入出力数学モデルが設定されている設定部と、前記脳波取得部によって取得された使用者の脳波の出力特性が、前記複数のクラスの内のどのクラスに属するかを決定するクラス決定部と、前記脳波取得部によって取得された使用者の脳波を入力として、前記クラス決定部によって決定されたクラスに対応付けられている前記入出力数学モデルを用いて出力した出力情報により前記マッサージ動作の適否を推定する推定本体部とを有している構成とすればよい。
この場合、推定するために用いられる入出力数学モデルは、脳波の出力特性についての相関に基づいて分類された複数のクラスそれぞれに対応付けられたものであり、取得された使用者の脳波の出力特性はどのクラスに属するかがクラス決定部によって決定され、当該決定されたクラスに対応付けられている入出力数学モデルが用いられるため、使用者毎に脳波の出力特性が異なることによる問題点の発生を抑制することができる。すなわち、脳波からマッサージ動作の適否を推定する精度を高めることが可能となる。
【0013】
また、適否推定部は、取得された使用者の脳波に基づいてマッサージ動作の適否を推定するが、脳波は非線形的な特性を有するため、推定結果に誤差が生じる場合もある。
(3)そこで、前記入出力数学モデルを、ニューラルネットワークとすればよく、この場合、脳波が、非線形的な特性を有することによる問題点の発生を抑制することができる。すなわち、脳波からマッサージ動作の適否を推定する精度を、より高めることが可能となる。
【0014】
また、前記のとおり、ある使用者にとって、被施療部の推定された弾性特性と前記参照情報とに基づいて求められた接触力が、相応しくないことが生じる原因として、使用者の体格差が考えられる。
(4)そこで、前記記憶部は、使用者の代表的な体格毎の参照情報を複数種類について記憶し、前記調整部は、実際に使用する使用者の体格に応じて前記複数種類の参照情報から選択された参照情報と、前記弾性特性推定部によって推定された弾性特性とに基づいて前記接触力を求める構成とすればよい。
この場合、代表的な体格毎の参照情報が複数種類について記憶されている中から、実際にマッサージ機を使用する使用者の体格に応じた参照情報が選択される。そして、この選択された参照情報と、弾性特性推定部によって推定された弾性特性とに基づいて接触力を求めるので、体格から判断して、できるだけ相応しいであろう参照情報を使用することができ、そして、前記のとおり、この参照情報を前記更新部が更新することができ、参照情報は使用者にとって、より相応しいものとすることが可能となる。
【0015】
また、前記(1)に記載のマッサージ機では、脳波取得部によって取得された脳波に基づいて、適否推定部がマッサージ動作の適否を推定し、また、前記(2)に記載のマッサージ機では、脳波取得部によって取得された使用者の脳波の出力特性が、複数のクラスの内のどのクラスに属するかを、クラス決定部は決定するが、これら(1)(2)のように取得される脳波に、使用者の動作に起因する動作ノイズが含まれていると、正確な推定及び正確な決定がされないおそれがある。
(5)そこで、前記脳波取得部が取得した脳波から、使用者の動作に起因する動作ノイズを除去する動作ノイズ除去部を有し、前記動作ノイズ除去部は、前記脳波取得部が取得した脳波の中から動作ノイズの存在を判定し、当該脳波の内の動作ノイズを含む領域を部分的に独立成分分析し、当該動作ノイズの成分を除去する構成とすればよい。
この場合、動作ノイズを含む領域を部分的に独立成分分析し、当該動作ノイズの成分を除去するので、脳波の内の、動作ノイズを含まない領域には、当該独立成分分析による影響を与えず、各種処理のために利用することができる。そして、動作ノイズを含む領域については、当該動作ノイズの成分が除去されるので、当該領域における脳波も各種処理のために用いることができる。このため、動作ノイズがたとえ多くなったとしても、適否推定部は多くの脳波に関する信号から、マッサージ動作の適否を推定することができ、また、クラス決定部は複数のクラスの内のどのクラスに属するかを決定することができる。
【0016】
(6)そして、動作ノイズの存在を正確に判定する手段として、前記動作ノイズ除去部は、前記脳波取得部が取得した脳波に基づく信号と、前記動作ノイズについての予め設定された波形雛型とを比較することで、動作ノイズの存在を判定すればよい。
【0017】
(7)また、前記各マッサージ機において、前記適否推定部は、快適である場合に得られる脳波に関する閾値と、前記脳波取得部から所定時間毎に取得された脳波との差分値、及び、当該差分値を累積した累積差分値を求め、当該累積差分値の増減に基づいて、前記マッサージ動作の適否を推定するのが好ましい。
この場合、時間経過に伴うマッサージ動作の適否を推定することができる。
【0018】
(8)また、本発明のマッサージシステムは、使用者の脳波を取得する脳波取得部と、使用者の被施療部の弾性特性を推定する弾性特性推定部と、被施療部の弾性特性と当該被施療部を押圧する押圧力との関係についての参照情報を記憶している記憶部と、前記弾性特性推定部によって推定された弾性特性と前記参照情報とに基づいて前記押圧力を求める調整部と、前記調整部によって求められた前記押圧力によりマッサージが行われた際に、前記脳波取得部から取得された脳波に基づいて当該マッサージの適否を推定する適否推定部と、前記適否推定部による推定結果に基づいて前記参照情報を更新する更新部と、を有していることを特徴とする。
【0019】
本発明によれば、弾性特性推定部が、使用者の被施療部の弾性特性を推定すると、調整部は、推定された弾性特性と記憶部が記憶している参照情報とに基づいて、被施療部を押圧する押圧力を求める。この際、ある使用者にとって、推定された弾性特性と前記参照情報とに基づいて求められた押圧力が、相応しくない場合もあり得る。しかし、このような場合であっても、当該押圧力によりマッサージが行われた際に、脳波取得部によって取得された前記ある使用者の脳波に基づいて、適否推定部が当該マッサージの適否を推定し、その推定結果に基づいて更新部が参照情報を更新する。このため、その後、調整部によって求められる押圧力は、更新された参照情報に基づいて求められるので、相応しい押圧力に近づけることが可能となる。
【0020】
このように、被施療部の弾性特性と押圧力との関係についての参照情報が、始めは、ある使用者に対して適していなくても、当該参照情報を、当該ある使用者に適合するように更新することができ、使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現することが可能となる。
【発明の効果】
【0021】
本発明によれば、被施療部の弾性特性と接触力(押圧力)との関係についての参照情報が、ある使用者に対して適していなくても、当該参照情報を、当該ある使用者に適合するように更新することができ、使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現することが可能となる。
【図面の簡単な説明】
【0022】
【図1】本発明のマッサージ機の実施の一形態の概略構成を示している側面図である。
【図2】機械本体ユニットの正面斜視図である。
【図3】マッサージ機の概略構成を示しているブロック図である。
【図4】マッサージ機の簡略モデル図である。
【図5】マッサージ動作の適否の推定処理の説明図である。
【図6】ニューラルネットワークの説明図である。
【図7】制御装置による処理を説明するフロー図である。
【図8】使用者から取得された脳波と、その脳波のパワースペクトルを示しているグラフである。
【図9】動作ノイズ除去部の構成を説明するブロック図である。
【図10】動作ノイズ除去部の判定部の機能を説明する説明図である。
【図11】(a)は、動作ノイズが除去された脳波の信号を示しており、(b)はそのパワースペクトルを示している。
【図12】独立成分分析の概念図である。
【図13】マッサージ動作の適否を推定するフロー図である。
【図14】閾値設定の説明図である。
【図15】α波及びβ波それぞれに関して、横軸を時間、縦軸を累積差分値として表したグラフである。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を図面に基づいて説明する。
〔1. マッサージ機の全体構成〕
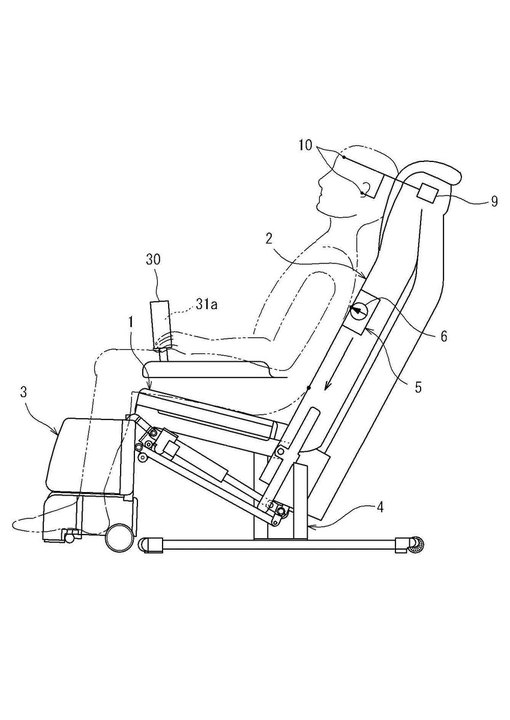
図1は本発明のマッサージ機の実施の一形態の概略構成を示している側面図である。このマッサージ機は、フレーム4と、フレーム4上に設けられ使用者が着座する座部1と、フレーム4の後側に設けられた背凭れ部2と、フレーム4の前側に設けられた脚載せ部3とを備えており、椅子型である。なお、この椅子型マッサージ機において、左右等の方向は、座部1に着座した使用者から見た方向であり、また、背凭れ部2においては、その幅方向を「左右方向」とし、その厚さ方向を「前後方向」とし、背凭れ部2の腰部から頭部へ向かう方向を「上下方向」とする。
【0024】
背凭れ部2内には施療子6を備えた機械本体ユニット(マッサージ機構部)5が設けられている。機械本体ユニット5は、背凭れ部2の内部を上下移動することができ、施療子6を使用者の被施療部(身体部分)に接触させ、当該施療子6にマッサージ動作を行わせることができる。
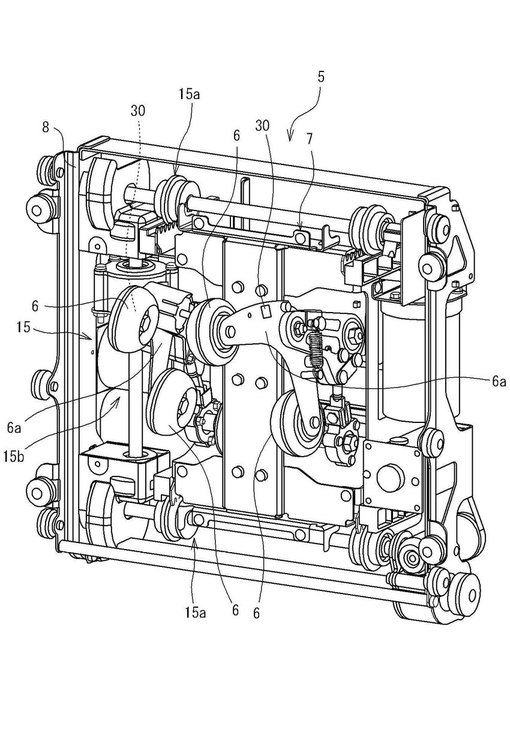
図2は、機械本体ユニット5の正面斜視図である。機械本体ユニット5の本体フレーム8にマッサージユニット7が前後移動可能に取り付けられている。
マッサージユニット7は、ローラからなる施療子(揉み玉)6と、この施療子6に揉み、叩き、指圧などのマッサージ動作をさせるために駆動する駆動部15とを有している。駆動部15は、施療子6に揉みや叩きの動作をさせる揉み叩き駆動部15bの他に、施療子6を含むマッサージユニット7を前後方向に移動させる押し出し駆動部15aを有している。図2の押し出し駆動部15aは、モータの回転によってマッサージユニット7を前後に移動させるラックピニオン式であるが、他の形式であってもよい。
【0025】
押し出し駆動部15aがマッサージユニット7を前後移動させることで、施療子6が前後移動して使用者の被施療部に対して指圧動作を行うことができ、さらに、揉みや叩きのマッサージを行う場合であっても、施療子6の前後方向の位置を調整することができる。施療子6の位置を前側(被施療部側)に移動させることで、当該施療子6によって被施療部に対して大きな力を与えることができ、強いマッサージが生じる。また、施療子6の位置を後側に移動させることで、施療子6によって小さな力を与えることができ、弱いマッサージが生じる。
【0026】
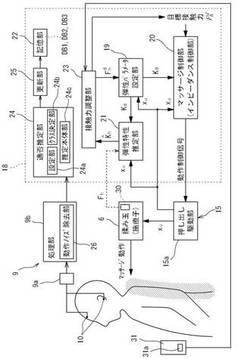
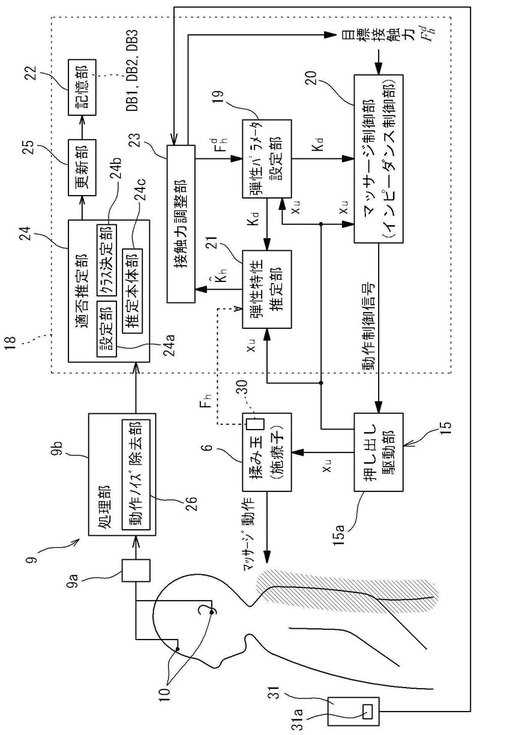
図3はマッサージ機の概略構成を示しているブロック図である。このマッサージ機は、制御装置18及び座部に着座した使用者の脳波を取得する脳波取得装置9を備えている。
脳波取得装置9は、座部に着座しているがマッサージを施療子6によって受ける前の使用者の脳波、又は、座部に着座してマッサージを受けている使用者の脳波を測定する測定器9aと、測定器9aが測定した脳波の信号を処理する処理部9bとを有している。測定器9aは、使用者の脳から生じる電気活動を測定するための陽極と陰極との電極10を有しており、電極10は、比較的装着が容易である額(陽極)−耳(陰極)の二カ所を一組として取り付けられる。また、図示しないが、グランド電極が額に取り付けられる。電極10の配置をさらに説明すると、陽極を左目上部付近(一般的にFp1と呼ばれる部分)とし、陰極を左耳とし、グランド電極を右目上部付近(一般的にFp2と呼ばれる部分)とする。
そして、電極10は、図1に示しているように、背もたれ部2のヘッドレスト部にリード線を介して設置することができ、これにより、ヘッドレスト部に頭部を凭れかけた使用者の脳波を測定することができる。なお、電極10は二組であってもよい。
【0027】
処理部9bは、図示しないが、アンプ、AD変換器及びコンピュータ部を有していて、測定器9aによって測定された脳波の信号は、処理部9bによって処理され、脳波の信号の内の、安静時(快適時)に発生すると言われているα波と不快時に発生すると言われているβ波との信号が処理部9bから出力される。
すなわち、処理部9bは、測定部9aが測定して得た脳波の信号についてFFTを用い、周波数毎のパワースペクトルを求め、それぞれの周波数帯(周波数帯の中央部)のパワースペクトルの総和によってα波のレベル、β波のレベルを求めている。そして測定部9aは、α波とβ波との変化率を示す指標として比(β波のレベル/α波のレベル;以下では(β/α)と記載する)を求めることができる。なお、本発明では、脳波のうち8Hz以上13Hz以下の周波数帯をα波とし、14Hz以上30Hz以下の周波数帯をβ波としている。
そして、処理部9bによって求められた脳波の信号に関する各値は、制御装置18に入力され、制御装置18によって処理される。なお、処理部9bの機能は、制御装置18が有していてもよい。
【0028】
〔2. 制御装置〕
制御装置18及び脳波取得装置9の処理部9bは、CPU及び記憶部を有しているプログラマブルなマイコンからなり、所定の各機能を実行するプログラムが記憶部に格納されている。制御装置18は、RAMやROMからなる記憶部22の他に、前記プログラムが実行する機能部として、弾性パラメータ設定部19、マッサージ制御部20、弾性特性推定部21、接触力調整部23、適否推定部24及び更新部25を備えている。また、脳波取得装置9の処理部9bは、動作ノイズ除去部26を備えている。各機能部については以下に説明する。
【0029】
前記マッサージ制御部20は、前記機械本体ユニット5(図2)の動作制御を行うことができ、例えば、押し出し駆動部15aに対して動作制御信号を出力することで当該押し出し駆動部15aを当該信号に応じて動作させ、施療子6(マッサージユニット7)の移動量及び施療子6(マッサージユニット7)の前後位置を制御することができる。
さらに、図3において、マッサージ制御部20は、施療子6の前後位置に関してインピーダンス制御を行うインピーダンス制御部としての機能を有している。マッサージ制御部20は、施療子6が使用者に加える接触力の目標値(目標接触力)Fhdが与えられると、その目標接触力Fhdに相当する力が使用者に加えられるようにインピーダンス制御する。マッサージ制御部20は、目標接触力Fhdに相当する所望の力に対応した押出量を決定して、押し出し駆動部15aによって施療子6を当該押出量について前後方向に移動させる。
このように、マッサージ制御部20が押し出し駆動部15aへ動作制御信号を与えると、押し出し駆動部15aは当該信号に基づいて動作し、施療子6に、被施療部に対する所望の接触力を発生させることができる。
【0030】
マッサージ制御部20の具体的な機能を説明する。マッサージ制御部20は、押し出し駆動部15aによる施療子6の前後方向の変位(位置)xuを取得することができる。なお、施療子6の変位量はマッサージユニット7の変位量と同じとなる。施療子6の変位は、マッサージ制御部20から押し出し駆動部15aが有しているモータ(図示せず)へ与えられる動作制御信号に基づいて、マッサージ制御部20内部で取得することができる。さらに、マッサージ制御部20は、施療子6の変位xuに基づいて、施療子6(マッサージユニット7)の移動速度、加速度を算出することもできる。
【0031】
図4は、マッサージ機の簡略モデルを示しており、前記のインピーダンス制御下における使用者の皮膚表面(被施療部)とマッサージユニット7との接触をバネ・ダンパで表現したものである。このモデル図では、水平線に対して角度θだけ傾斜した方向を、マッサージユニット7の前後方向としている。つまり、図4は、背凭れ部を後方へ倒したリクライニング状態を示しており、マッサージユニット7の前後方向と背凭れ部の前後方向とが一致している。
【0032】
〔2.1 弾性パラメータKdの決定〕
前記弾性パラメータ設定部19は、被施療部に接触している施療子6の変位情報(変位xu)等に基づいて、目標接触力Fhdを実現するための弾性パラメータKdを決定する機能を有している。図4において、被施療部の皮膚弾性特性及び皮膚粘性係数をそれぞれKh,Dhとし、マッサージユニット7が元々持つ機械的な弾性係数及び粘性係数をそれぞれKu,Duとし、インピーダンス制御の弾性パラメータ及び粘性パラメータをそれぞれKd,Ddとしている。
【0033】
さらに、使用者及びマッサージユニット7は、施療子6(マッサージユニット7)に対して重力による影響を与えている。つまり、背もたれ部2に使用者が凭れることにより、重力によって、この使用者の全体重のうちの一部(荷重Mh)が施療子6に対して影響を及ぼす。さらに、マッサージユニット7は、自身の重量Muの影響を受ける。マッサージユニット7の重量Mu及び使用者の体重は既知の値であり、この値は制御装置18に予め記憶される。なお、前記荷重Mhは、使用者の体重の例えば50%として設定される。
【0034】
マッサージユニット7(施療子6)の変位xuを用いたマッサージユニット7の運動方程式は、式(1)である。なお、マッサージユニット7の機械的な弾性係数Ku及び粘性係数Duを0としている。
【数1】

式(1)において、fsはマッサージユニット7(施療子6)自身が出力する力(制御入力)、Fhは被施療部からマッサージユニット7に加わる力、Fuはマッサージユニット7の重量による成分であり、Fu=−Mu・g・sinθである。
【0035】
また、マッサージユニット7がFhによって、式(2)の振る舞いをするためのマッサージユニット7(実際には押し出し駆動部15)への制御入力fsは、式(3)のようになる。
【数2】
【数3】
式(3)のfsが、インピーダンス制御による制御入力となる。ただし、式(2)(3)においてxdは、マッサージユニットの変位xuの目標位置(目標接触力Fhdに対応する位置)である。
【0036】
式(2)をKdについて解くと、式(4)となり、この式(4)によって、弾性パラメータ設定部19は、弾性パラメータを決定することができる。なお、式(4)では、式(2)のFhを、目標接触力Fhdに置き換えている。
【数4】
【0037】
〔2.2.1 被施療部の皮膚弾性特性の推定(その1)〕
次に、図4に示したモデルを基に、施療子6が被施療部より与えられる力Fhを検出するセンサ(力センサ)を用いることとなく、皮膚弾性特性を推定する方法を説明する。
マッサージユニット7から使用者の皮膚に加わる力は、作用反作用により、−Fhであるため、式(5)が得られる。xeは、Fh=0[N]となるxuの平衡位置(基準位置)である。
【数5】
【0038】
ここで、式(5)及び式(1),(3)により、Khについて解くと、式(6)となり、マッサージユニット7の変位・速度・加速度から、重力によって使用者から施療子6が受ける荷重の情報を考慮して、使用者の皮膚弾性特性Khの推定値が得られる。ただし、ヒトの粘性係数Dhは既知とする。
【数6】
【0039】
このように、弾性特性推定部21は、施療子6が被施療部に接触したときの当該施療子6の変位xuに基づいて、当該被施療部の皮膚弾性特性(弾性係数)Khを推定することができる。すなわち、皮膚弾性特性Khは、マッサージユニット7の慣性質量Md(ここでは、マッサージユニットの質量Muと等しく既知である)、インピーダンス制御の粘性パラメータDd(一定値)、インピーダンス制御の弾性パラメータKd、使用者の粘性特性Dh(一定値)、マッサージユニット7(施療子6)の変位xu、マッサージユニット7(施療子6)の目標位置xd、重力によって使用者から施療子6が受ける荷重などによって演算により求められる。なお、マッサージユニット7の速度、加速度、目標速度は、マッサージユニット7の変位xu、目標位置xdに基づいて、微分演算などにより算出することができる。
【0040】
〔2.2.2 被施療部の皮膚弾性特性の推定(その2)〕
施療子6が被施療部より与えられる接触力Fhを検出するセンサ(力センサ)を用いて皮膚弾性特性を推定する方法を説明する。この場合、マッサージ機は、使用者の皮膚表面に実際に加わっている力Fhを計測するセンサを備えている。このセンサは圧力センサとすればよいが、加速度センサとすることもできる。また、図2に示しているように、センサ30は、施療子6に設置してもよく、又は、施療子6を取り付けているアーム6aに設置してもよい。
図3において、前記弾性特性推定部21は、皮膚弾性特性Khの推定値を、式(6)ではなく、式(7)によって算出する。前記センサ30によって使用者の被施療部との間に加わっている力(接触力)Fhを計測する場合、式(4)及び式(6)から、式(7)が得られる。なお、式(7)では、式(4)のFhdをFhに変更している。
【数7】
【0041】
施療子6を被施療部へ所定の変位について押し込んだ際、マッサージユニット7は前後方向に停止した状態にあることから、マッサージユニット7の速度は0となり、また、(説明を容易とするために)背凭れ部2が垂直にあるとすればθ=0となる。この場合、式(7)が式(8)となる。式(8)の分母(xe−xu)は基準位置からのマッサージユニット7の変位を表す。また、分子のFhは、被施療部に加わっている力(接触力)であり、センサ30によって検出される値である。
【数8】
【0042】
以上の皮膚弾性特性の推定(その1)(その2)で説明したように、弾性特性推定部21は、マッサージ機の一部としての施療子6が所定の被施療部に接触している際の情報に基づいて、当該被施療部の皮膚弾性特性(皮膚筋系弾性特性)Khを推定することができる。すなわち、(その1)の場合、弾性特性推定部21は、施療子6の変位xuに関する情報に基づいて皮膚弾性特性Khを推定することができる。一方、(その2)の場合、弾性特性推定部21は、施療子6が受ける反力(接触力)Fhに関する情報に基づいて皮膚弾性特性Khを推定することができる。
なお、被施療部が凝っていると当該部分は硬くなっていることがあり、この場合、当該部分の皮膚弾性特性は高い値になると考えられる。一方、被施療部がほぐれていると、当該部分の皮膚弾性特性は低い値になると考えられる。
【0043】
〔2.3 接触力の調整〕
図3において、前記記憶部22には、被施療部の皮膚弾性特性Khと、施療子6を当該被施療部に接触させる目標接触力Fhdとの関係についての参照情報(参照データベース)DBが記憶されている。
この参照情報DBは、被施療部の皮膚弾性特性Khと、その皮膚弾性特性Khである場合に使用者が快適であると感じるであろう接触力との関係を表したデータベースである。つまり、参照情報DBは、皮膚弾性特性Khが判ればそれに適した接触力を求めることができるように予め設定されている。
この参照情報DBは、例えば被施療部の皮膚弾性特性Khと、当該被施療部に施療子6を接触させた際に快適であると感じるであろう接触力とを、例えば代表的な複数の使用者から取得し平均化して求めることができる。
【0044】
この参照情報DBを接触力調整部23が参照することができ、接触力調整部23は、弾性特性推定部21によって推定された被施療部の皮膚弾性特性と、当該参照情報DBとに基づいて、施療子6を当該被施療部に接触させる接触力を、目標接触力Fhdとして求める。そして、この目標接触力Fhdを制御入力として、前記マッサージ制御部20は施療子6によるマッサージ動作を制御することができる。
このように、本実施形態のマッサージ機では、使用者の皮膚弾性特性Khの推定値に応じて、接触力の目標値、すなわち、使用者に印加される力が設定され、好適なマッサージを与えることができる。
【0045】
参照情報DBは、前記のとおり、皮膚弾性特性Khが判ればそれに適した接触力を求めることができるように予め設定されたものであるが、ある使用者にとって、推定された皮膚弾性特性Khと前記参照情報DBとに基づいて求められた接触力が、相応しくないことが生じることがある。これは、例えば使用者の体格差(例えば、太っている、痩せている等の身体的特徴)によって生じると考えられる。
そこで、本実施形態では、使用者の代表的な体格毎の参照情報が複数種類について設定されていて、記憶部22は複数種類の参照情報DB1,DB2,DB3を記憶している。
【0046】
そして、マッサージ機が有している操作装置31(図1及び図3参照)には、使用者の体格を入力するボタン等の操作部31aが設けられており、実際にマッサージ機を使用する使用者は、この操作部31aを操作して制御装置18に自己の体格を入力する。
すると、接触力調整部23は、入力された使用者の体格に応じて、前記複数種類の参照情報DB1,DB2,DB3の中から、最も近似する体格として設定されている参照情報を選択し、選択された参照情報と、弾性特性推定部21によって推定された皮膚弾性特性とに基づいて接触力を求める処理を行う。
このように、体格差に応じて複数種類の参照情報DB1,DB2,DB3が設定されていることで、実際にマッサージ機を使用する使用者の体格から判断して、できるだけ相応しいであろう参照情報を使用することができる。
【0047】
〔2.4 マッサージ動作の適否の推定〕
接触力調整部23によって接触力(接触力目標値Fhd)が求められると、施療子6により当該接触力(接触力目標値Fhd)を生じさせるマッサージ動作が前記マッサージ制御部20の制御によって実際に行われるが、前記適否推定部24は、このマッサージ動作が行われた際に脳波取得装置9から取得された脳波に基づいて、当該マッサージ動作の適否を推定する機能を有している。この適否推定部24による推定処理は、脳波取得装置9によって取得された脳波の信号(α波のレベル及びβ波のレベル)に基づいて行われる。なお、マッサージ動作の適否の推定とは、当該マッサージ動作が快適であるのか、又は、不快であるのかを判定することである。
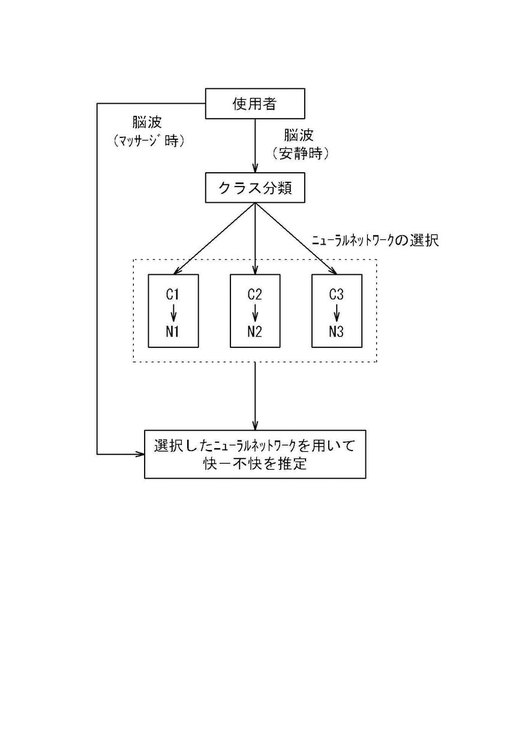
しかし、一般的に脳波(α波及びβ波)は使用者毎に出力特性が異なることが知られている。そこで、このような脳波を用いて高い推定精度を確保するために、本実施形態では、適否推定部24は図5に示している推定処理を行う。
【0048】
このために、適否推定部24は、設定部24a、クラス決定部24b及び推定本体部24cを有している(図3参照)。
設定部24aは、複数種類の入出力数学モデルとしてニューラルネットワークが設定され、そのためのプログラムを記憶し、このプログラムを実行する機能を有している。このニューラルネットワークは、脳波の出力特性についての相関に基づいて分類された複数のクラスそれぞれに対応付けられた数式モデルとして、設定部24aに設定されている。図5に示した本実施形態では、脳波の出力特性についての相関に基づいて3つのクラスC1,C2,C3に分類されており、同じクラス内では脳波の出力特性の相関が高くなるように分類されている。そして、クラスC1にニューラルネットワークN1が、クラスC2にニューラルネットワークN2が、クラスC3にニューラルネットワークN3が対応付けられて設定されている。
【0049】
クラスの分類は、複数の代表的な使用者それぞれが、座部1に座り、施療子6によるマッサージ動作が行われていない安静状態となり、この状態で脳波取得装置9によって取得された脳波に基づいて行われている。この際に取得される脳波は、各使用者が安静状態での信号であるが、同じ安静状態であっても使用者毎で出力される脳波(脳波の時間的変化)の傾向は様々である。このため、安静状態の脳波の傾向を基準としてクラスが分類される。
脳波取得装置9の処理部9bによって取得される脳波に関する値としては、ある時間帯で取得されたα波、β波、これらの比(β/α)であり、また、これらが正規化された値、平均値、分散、傾きである。これらの内の少なくとも一つが用いられて、クラス分類がK−means法によって行われる。なお、前記正規化された値は、α波、β波、これらの比それぞれが最大値で除算された値であり、傾きは、所定時間毎(例えば10秒毎)におけるα波、β波、これらの比の各値(平均値)を最小二乗法で直線化した場合に得られる直線の傾きである。
【0050】
K−means法によるクラス分類のアルゴリズムは、以下のとおりである。
<1>K個のクラスの代表値Vcをランダムに設定する(c=0,1・・・K)。
<2>全てのデータを最も近いVcを持つクラスに割り当てる。
<3>式(9)よりそれぞれのクラスのVcを算出する。
<4>すべてのクラスのVcが変化しなければ終了とし、変化があれば<2>以降を繰り返して実行する。
【数9】
なお、式(9)のNcは各クラスの個体数であり、Inpjは、j番目の入力(α波、β波、これらの比(β/α)それぞれの正規化された値、平均値、分散、傾きの内の少なくとも一つ)を示す。
【0051】
ニューラルネットワークN1,N2,N3それぞれは、図6に示しているように、誤差逆伝播法を用いた階層型ニューラルネットワークである。このニューラルネットワークを表現すると、入力層のノード番号をi、中間層をj、出力層をkとし、それぞれの総数をI,J,Kとし、入力層と中間層との間の重みをwm(i,j)とし、中間層と出力層との間の重みをwo(j,k)とし、入力をInpi、出力をOutk、中間出力をMidjとすると、n番目の中間出力をMidnは、式(10)となり、n番目の出力Outnは、式(11)となる。
【数10】
【数11】
【0052】
式(10)及び式(11)のfは、任意に固定された関数であり、本実施形態では、シグモイド関数f(x)=1/{1+exp(−x)}としている。また、重みの修正式は最急降下法を用い式(12)となる。Ekは、出力値と真値との誤差である。
【数12】
【0053】
そして、ニューラルネットワークN1,N2,N3それぞれにおいて、実際に施療子6によってマッサージ動作が行われた際に脳波取得装置9から取得された脳波に基づく値を、入力データとしており、出力データは不快を「0」、快適を「1」としている。入力データは、α波、β波、これらの比(β/α)が正規化された値、平均値、分散、傾きとすることができるが、後に説明するが、α波、β波、これらの比(β/α)の傾きとするのが好ましい。
【0054】
前記クラス決定部24bは、脳波取得装置9によって取得された使用者の脳波の出力特性が、前記複数のクラスC1,C2,C3(図5参照)の内のどのクラスに属するかを決定する処理を行う。なお、ここでの脳波取得装置9によって取得される脳波は、マッサージ動作前の安静状態のものである。すなわち、使用者が座部1に着座し、施療子6によるマッサージ動作が開始される前に取得された脳波である。この脳波が取得されると、クラス決定部24bは、当該脳波の傾向が、安静状態の脳波の傾向を基準として分類されているクラスC1,C2,C3の内のどのクラスに最も近似しているかの判定を行う。
【0055】
このクラス決定の判定は、取得された脳波の時系列データにより行われる。例えば、所定時間Δtについて脳波の時系列データが脳波取得装置9の処理部9bによって取得されたとする。時系列データには、α波、β波、これらの比(β/α)それぞれの正規化された値、平均値、分散、傾きが含まれている。
そして、単位時間毎の、α波、β波、これらの比(β/α)それぞれの正規化された値、平均値、分散、傾きに関する値と、クラスC1,C2,C3それぞれの代表値(α波、β波、これらの比(β/α)それぞれの正規化された値、平均値、分散、傾きの代表値)とを比較し、単位時間毎についてどのクラスC1,C2,C3に最も近似しているかを数学的手法により求める。そして、前記所定時間Δt全てについてこの数学的手法を行い、最も頻出したクラスを、最も近似しているクラスとして決定する。
取得された脳波の時系列データが最も近似しているクラスを、当該使用者が属するクラスとして決定する。
【0056】
このように、複数のクラスC1,C2,C3の内のどのクラスに属するかが決定されると、決定されたクラスに対応付けられたニューラルネットワークが用いられて、推定本体部24cによって、施療子6によるマッサージ動作の適否が推定される。
つまり、推定本体部24cは、クラス決定部24bによって決定されたクラスに対応付けられているニューラルネットワークを用いて出力した出力情報により、マッサージ動作の適否を推定する。なお、ここで入力される脳波は、脳波取得装置9によって取得された使用者のマッサージ状態での脳波である。そして、出力情報は、前記のとおり、不快は「0」であり、快適は「1」である。
【0057】
〔2.5 参照情報の更新〕
適否推定部24によって、マッサージ動作の快適又は不快が推定されると、更新部25は、適否推定部24による推定結果に基づいて前記参照情報DBを更新する処理を行う。
参照情報DBは、前記のとおり、被施療部の皮膚弾性特性Khと、その皮膚弾性特性Khの場合に使用者が快適であると感じるであろう接触力との関係を表した情報であるが、例えば、適否推定部24によって不快であると推定された場合、参照情報DBにおいて、ある皮膚弾性特性Khの場合に使用者が快適であると感じるであろう接触力を、前回値(初期値)よりも小さく設定し直す。これに対して、適否推定部24によって快適であると推定された場合、参照情報DBの更新を行わず、そのままの値(前回値(初期値))を後のマッサージ動作でも採用する。
なお、前記のとおり、本実施形態では、複数種類の参照情報DB1,DB2,DB3が設定されているので、更新部25によって更新される参照情報は、当然、複数種類の参照情報DB1,DB2,DB3の中から選択された(接触力の推定に用いられた)ものである。
【0058】
〔3. 制御装置によるマッサージ動作の適否の推定、及び、参照情報の更新の具体例〕
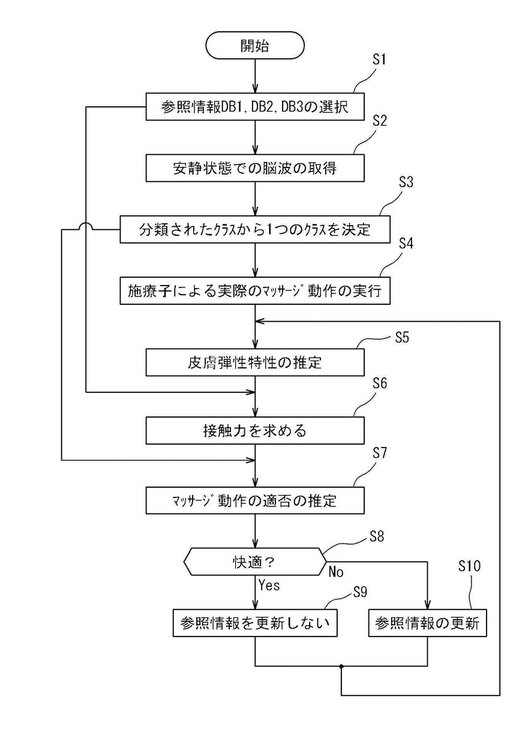
制御装置18の記憶部22には、参照情報DB1,DB2,DB3が記憶されており、また、適否推定部24の設定部24aには、分類された3つのクラスC1,C2,C3と、それぞれに対応付けられてニューラルネットワークN1,N2,N3が記憶されている。そして、図7は、制御装置18による処理を説明するフロー図である。
図3と図7とにおいて、使用者は、座部1(図1参照)に着座すると、自己の体格についての情報を操作装置31を介して制御装置18に入力する。制御装置18に入力された使用者の体格に応じて、接触力調整部23は、複数種類の前記参照情報DB1,DB2,DB3の中から、最も近似する体格として設定されている参照情報を選択する(図7のステップS1)。本実施形態では、DB1が選択されたとする。
【0059】
そして、脳波取得装置9によってマッサージを受ける前の使用者の安静状態での脳波が取得されると(ステップS2)、適否推定部24のクラス決定部24bは、取得された脳波の出力特性が、複数の前記クラスC1,C2,C3の内のどのクラスに属するかを決定する処理を行う(ステップS3)。本実施形態では、クラスC1が選択されたとする。また、各クラスにはニューラルネットワークが対応付けて設定されているので、選択されたクラスC1に対応するニューラルネットワークN1が用いられて、推定本体部24cによって、後にマッサージ動作の適否を推定することになる。
【0060】
前記ステップS2の後、駆動部15が駆動して施療子6によって実際のマッサージ動作が実行される(ステップS4)。本実施形態では、押し出し駆動部15aが駆動して施療子6が被施療部に接触し押圧するマッサージ動作が実行される。そして、弾性特性推定部21によって、使用者の被施療部の皮膚弾性特性(皮膚筋系弾性特性)Khが推定される(ステップS5)。なお、この推定処理は、前記〔2.2.1 被施療部の皮膚弾性特性の推定(その1)〕又は〔2.2.2 被施療部の皮膚弾性特性の推定(その2)〕で説明したように、施療子6が所定の被施療部に接触している際の情報に基づいて、当該被施療部の皮膚弾性特性Khを推定する。
【0061】
被施療部の皮膚弾性特性Khが推定されると、接触力調整部23は、ステップS1で選択された参照情報DB1とステップ5で推定された皮膚弾性特性Khとに基づいて、施療子6による接触力を求める処理を行う(ステップS6)。この接触力(目標接触力Fhd)が求められると、当該接触力(目標接触力Fhd)に相当する力が使用者に加えられるようにインピーダンス制御が、マッサージ制御部20によって実行される。
そして、適否推定部24は、このマッサージ動作が行われた際に脳波取得装置9から取得された脳波に基づいて、当該マッサージ動作の適否を推定する(ステップS7)。具体的には、適否推定部24の推定本体部24cは、ステップS3で決定されたクラスC1に対応付けられているニューラルネットワークN1を用いて出力した出力情報により、マッサージ動作の適否を推定する。
このニューラルネットワークN1に入力される脳波は、前記マッサージ動作中に脳波取得装置9が使用者から取得したマッサージ状態での脳波である。このニューラルネットワークN1の出力情報として「0」が出力されると当該マッサージ動作は不快であると推定され、「1」が出力されると当該マッサージ動作は快適であると推定する。
なお、不快であると推定される原因としては、前記のとおり、皮膚弾性特性に基づいて接触力を決定するための参照情報DB1は、代表的な使用者から取得されたものであり、万人向けではないことが考えられるためである。つまり、今回の使用者には相応しいものではなかったと考えられる。
【0062】
マッサージ動作が快適(出力情報が「1」)であると推定されると(ステップS8でYesの場合)、更新部25は、参照情報DB1を更新しない(ステップS9)。そして、マッサージ動作は継続して実行されているので、前記ステップS5に戻り、施療子6が引き続いて同じ被施療部又は他の被施療部に接触している際の情報に基づいて、弾性特性推定部21は、当該被施療部の皮膚弾性特性Khを推定する。そして、更新されなかった参照情報DB1に基づいて接触力が求められ(ステップS6)、継続中のマッサージ動作の適否が再び推定される(ステップS7)。以上のように、制御装置18は各種処理を繰り返し実行する。
【0063】
これに対して、前記マッサージ動作が不快(出力情報が「0」)であると推定されると(ステップS8でNoの場合)、更新部25は参照情報DB1を更新する(ステップS10)。そして、この場合であっても、マッサージ動作は継続して実行されているので、前記ステップS5に戻り、施療子6が引き続いて同じ被施療部又は他の被施療部に接触している際の情報に基づいて、弾性特性推定部21は、当該被施療部の皮膚弾性特性Khを推定する。そして、更新された参照情報DB1に基づいて接触力が求められ(ステップS6)、再び継続中のマッサージ動作の適否が推定される(ステップS7)。
【0064】
ここで、ステップS10では参照情報が更新されているので、当該更新済みの参照情報(DB1−(1))は、代表的な使用者から取得された初期の参照情報(DB1−(0))よりも、今回の使用者に対してより適したものに近づいている。このため、たとえ2回目(さらには2回目以降)の適否の推定(ステップS7)で不快と判定されても、参照情報DB1を判定毎に更新すれば、使用者に対してより適したものに更新され、今回の使用者の皮膚弾性特性Khに対して、いずれ適した接触力を得ることができるようになる。
このようなことから、参照情報DBを、想定されている全ての使用者毎に設定しなくても済み、さらには、不特定多数の使用者が使用するマッサージ機であっても対応することができる。本実施形態では、体格差に基づいて設定された3種の参照情報DB1,DB2,DB3でよい。
【0065】
以上のように、本実施形態のマッサージ機によれば、弾性特性推定部21が、使用者の被施療部の皮膚弾性特性Khを推定すると、接触力調整部23は、推定された皮膚弾性特性Khと記憶部22が記憶している参照情報DB1とに基づいて、施療子6を当該被施療部に接触させる接触力を求める。この際、ある使用者にとって、被施療部の推定された皮膚弾性特性Khと参照情報DBとに基づいて求められた接触力が、相応しくない場合もあり得る。しかし、このような場合であっても、当該接触力によりマッサージ動作が行われた際に脳波取得装置9によって取得された当該ある使用者の脳波に基づいて、適否推定部24が当該マッサージ動作の適否を推定し、その推定結果に基づいて更新部25が参照情報DB1を更新する。このため、その後、接触力調整部23によって求められる接触力は、更新された参照情報に基づいて求められるので、相応しい接触力に近づけることが可能となる。
【0066】
このように、被施療部の皮膚弾性特性Khと接触力との関係についての参照情報DB1が、始めは、ある使用者に対して適していなくても、当該参照情報DB1を、当該ある使用者に適合するように更新することができるので、新規の使用者に対しても、適したマッサージを実現することが可能となる。
また、皮膚弾性係数Khを考慮して参照情報DB1に基づいて施療子6の接触力を決定することで、使用者の身体的状態を考慮することができる。そして、脳波取得装置9によって使用者の脳波を取得することで、施療子6のマッサージ動作によるマッサージ効果や反応等の精神的状態を考慮して、より適切なマッサージを使用者に施すことが可能となる。
【0067】
なお、マッサージ動作途中で取得された使用者の脳波に基づいて当該マッサージ動作の適否を、適否推定部24が推定するが、脳波は非線形的な特性を有するため、さらに、一般的に脳波は使用者毎に出力特性が異なるため、推定結果に誤差が生じる場合もある。
しかし、本実施形態では、マッサージ動作の適否を推定するためにニューラルネットワークが用いられることで、非線形的な特性を有することによる問題点の発生を抑制することができる。
しかも、マッサージ動作の適否を推定するために用いられるニューラルネットワークは、脳波の出力特性についての相関に基づいて分類された複数のクラスC1,C2,C3それぞれに対応付けられたものである。そして、取得された使用者の脳波の出力特性が、どのクラスに属するかをクラス決定部24bが決定し、決定されたクラスC1に対応付けられているニューラルネットワークN1が用いられるため、使用者毎に脳波の出力特性が異なることによる問題点の発生を抑制することができる。
以上より、脳波からマッサージ動作の適否を推定する精度を高めることが可能となる。
そして、クラスC1,C2,C3は、安静状態での脳波の傾向が似通ったものを同一のクラスとするようにして分類されているので、ニューラルネットワークの出力として得られるマッサージ動作の適否の推定結果の精度を、より一層高くすることができる。
【0068】
前記実施形態では、クラス分類のためにK−means法によって用いられる脳波として、ある時間帯で取得されたα波、β波、これらの比(β/α)が正規化された値、平均値、分散、傾きの全てを用いてもよいが、少なくとも一つを用いればよく、特に「傾き」を用いるのが好ましい。これは、K−means法によって分類された同じクラスに属する任意の二つのデータの「傾き」に関する相関係数は、他のものと比べると特に高く、「傾き」に関する相関係数が0.5以上有することが確認されたためである。
したがって、α波、β波、これらの比(β/α)についての「傾き」の値が、最も脳波の傾向を捉えていると考えられるので、クラス分類の他に、マッサージ動作の適否を判定する際、ニューラルネットワークに当該「傾き」を入力するのが好ましい。なお、「傾き」は、前記のとおり所定時間毎におけるα波、β波、これらの比の各値(平均値)を最小二乗法で直線化した場合に得られる直線の傾きである。
【0069】
さらに説明すると、脳波の信号の変化の指標として、平均や分散を採用する場合、例えば快適であるという同じ条件であっても、使用者毎でその脳波の信号のレベルの大小は異なる。このため、同じクラス内に属する使用者の平均や分散についてのデータであっても、相関係数が低くなると考えられる。これに対して、傾き(及び正規化した値)は、脳波の信号のレベルの大小が使用者毎で異なっていても、同じ条件であれば、同様の変化を表すことから、同じクラス内に属する使用者のデータは相関係数が高くなると考えられる。
【0070】
また、本実施形態の、適否推定部24によるクラス分類及びニューラルネットワークを用いたマッサージ動作の適否の精度についての検証を行った結果を説明する。このために、分類された前記クラスC1,C2,C3の内の一つのクラス(C3)に属する複数の使用者に対して、予め快適と感じるマッサージ動作と、予め不快と感じるマッサージ動作とを行い、それぞれの場合において脳波取得装置9により脳波を取得した。
脳波をある時間として70秒取得し、この脳波の信号として、<1>α波の傾き、<2>β波の傾き、<3>比(β/α)の傾きそれぞれについて、10秒毎を1組とし、7組の入力データを得て、前記クラス(C3)に対応付けられたニューラルネットワークの入力層のノード数を21(3×7)とした。中間層のノード数は60であり、出力層のノード数は1である。
この結果、施療子6によって快適と感じるマッサージ動作を行った場合に取得された前記脳波を入力として、適否推定部24のニューラルネットワークを用いた出力が「1」となった確率、つまり、施療子6によって快適と感じるマッサージ動作を行って、適否推定部24が快適であると推定できた確率は80%を超え、また、施療子6によって不快と感じるマッサージ動作を行った場合に取得された前記脳波を入力として、適否推定部24のニューラルネットワークを用いた出力が「0」となった確率、つまり、施療子6によって不快であると感じるマッサージ動作を行って、適否推定部24が不快であると推定できた確率は80%を超えたことが判った。
このように、本実施形態によれば、高い精度でマッサージ動作の適否を推定することができる。
【0071】
前記実施形態では、記憶部22に記憶させる参照情報DBの数を3としたが、これに限定されるものではなく、また、K−means法によって分類したクラス数を3としたが、これに限定されるものではない。
なお、クラス分類に関して説明すると、前記のとおり、脳波に基づく値のうち、同じクラス内では「傾き」についての相関係数が高いことから、安静状態の脳波の時間的変化の傾向として、α波が上昇する場合、α波が下降する場合、及び、α波が変化しない場合というように、大きく3つの傾向があることが考えられる。一般的には、安静状態ではα波は上昇し、β波は降下すると言われているが、同じ状態であっても、使用者によっては脳波の傾向が異なることが判る。同じ安静状態や同じマッサージ状態であるにもかかわらず、脳波の出力の傾向が異なるようなデータの集合では、ニューラルネットワークによる推定精度が低下することがあるが、本実施形態では、脳波の傾向に相関が高いデータ毎にクラス分類し、クラス毎にニューラルネットワークが設定され、属するクラスが決定されると当該クラスに対応付けられたニューラルネットワークが採用されるので、前記のような推定精度の低下を抑制することができる。
【0072】
前記実施形態では、マッサージ機を椅子型である場合として、マッサージ動作のための出力(接触力)を求める場合を説明したが、椅子型以外にベッド型であってもよい。さらに、本発明は、前記脳波取得装置9及び制御装置18の前記各機能部を、マッサージ機能を有する主体(マッサージ機)とは独立したマッサージシステムに備えさせ、機能させることができる。この場合、マッサージ機能を有する主体が使用者の被施療部を押圧する押圧力を、マッサージシステムによって求める構成となる。
【0073】
すなわち、マッサージシステムを、図3を参考にして説明すると、使用者の脳波を取得する脳波取得装置9と、制御装置18とを備えていて、この制御装置18は、使用者の被施療部の皮膚弾性特性を推定する弾性特性推定部21と、被施療部の皮膚弾性特性と当該被施療部を押圧する押圧力との関係についての参照情報を記憶している記憶部22と、前記弾性特性推定部21によって推定された皮膚弾性特性と前記参照情報とに基づいて前記押圧力を求める調整部23と、この調整部によって求められた前記押圧力によりマッサージが行われた際に、前記脳波取得装置9から取得された脳波に基づいて当該マッサージの適否を推定する適否推定部24と、この適否推定部24による推定結果に基づいて前記参照情報(の押圧力)を更新する更新部25とを有している。
各部の構成、機能は、マッサージ機について説明したものと同様であり、その説明を省略する。
【0074】
〔4. 動作ノイズ除去について〕
前記実施形態のマッサージ機では、脳波取得装置9によって取得された脳波に基づいて、適否推定部24がマッサージ動作の適否を推定している。また、脳波取得装置9によって取得された使用者の脳波の出力特性が、複数のクラスC1,C2,C3の内のどのクラスに属するかを、適否推定部24(クラス決定部24b)が決定している。このように脳波を取得してマッサージ動作の適否の推定やクラスの決定がされているが、この取得された脳波に、使用者の動作に起因する動作ノイズが多く含まれていると、正確な推定及び正確な決定がされないおそれがある。
【0075】
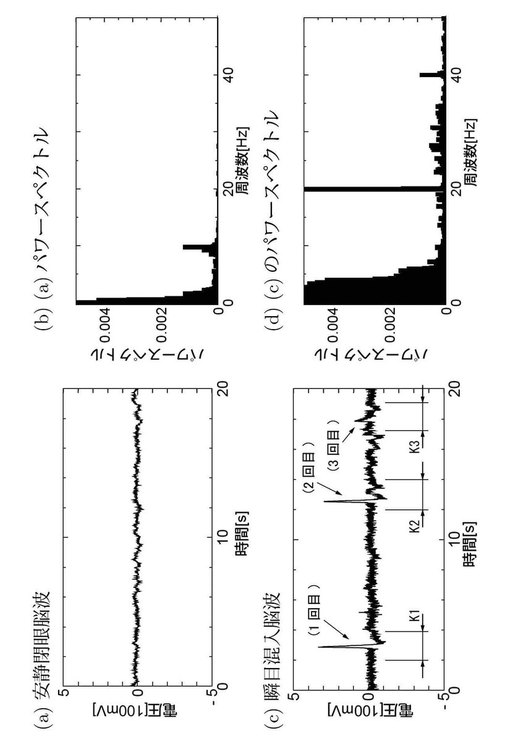
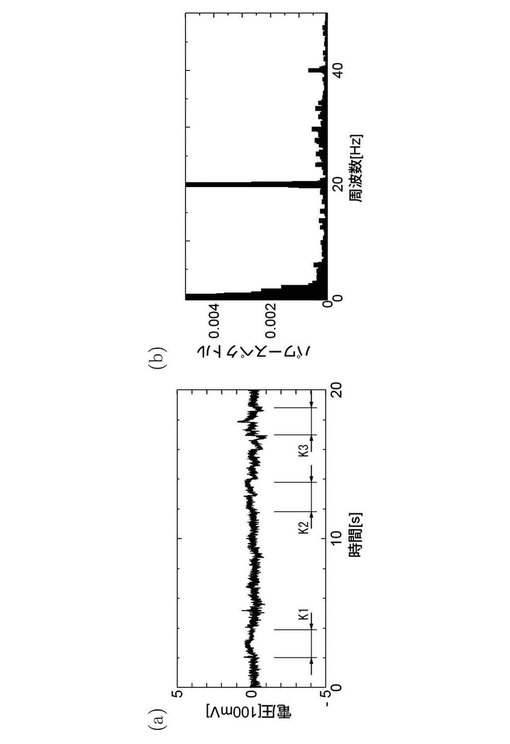
図8(a)は、安静状態で眼を閉じた使用者から取得された脳波であり、図8(b)はこの脳波のパワースペクトルを示している。図8(c)は、安静状態ではあるが三回瞬きをした使用者から取得された脳波であり、図8(d)は、この脳波のパワースペクトルを示している。図8(c)に示しているように、使用者が脳波取得中に三回瞬きをすることにより、脳波には、三度の乱れ(二度のインパルス状の動作ノイズ)が含まれている。
また、瞬きをすることによって、脳波に+側(mV)の出力が大きく生じた後、−側(mV)の出力が生じることが知られている。そして、図8(d)に示しているように、瞬きによる動作ノイズが低周波域に含まれている。
このように、瞬きによる動作ノイズは、低周波(特に2〜9Hz)に現れ、その一部がα波領域に影響を与えることから、特にα波の信号(α波に基づく値)を用いてマッサージ動作の適否の推定や、クラスの決定を行うためには、このような動作ノイズを除去するのが好ましい。
【0076】
そこで、本発明のマッサージ機は、図3に示しているように、使用者の被施療部に接触させる施療子6を有し当該施療子6にマッサージ動作を行わせる前記機械本体ユニット5(図2参照)と、前記使用者の脳波を取得する測定器9aを有する前記脳波取得装置9と、この脳波取得装置9の測定器9aが取得した脳波に基づいて前記機械本体ユニット5の動作を制御する前記制御装置18とを備えており、脳波取得装置9又は制御装置18は、前記測定器9aが取得した脳波から、使用者の動作(眼球動作)に起因する動作ノイズを除去する動作ノイズ除去部26を有している。
【0077】
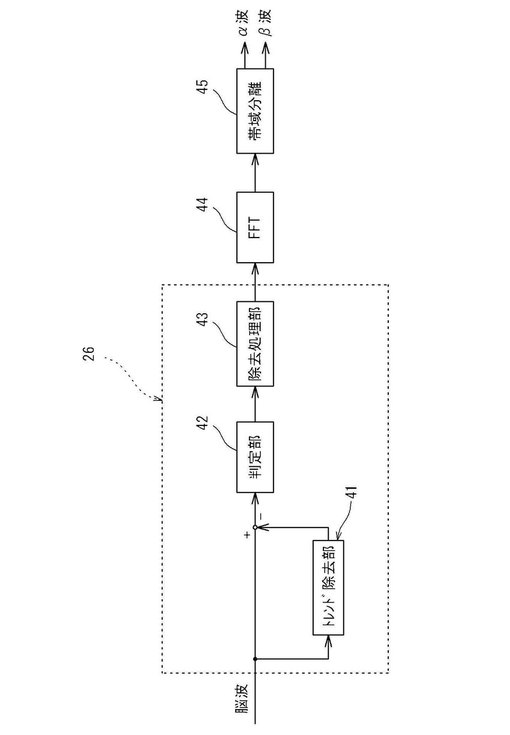
図9は動作ノイズ除去部26の構成を説明するブロック図である。
動作ノイズ除去部26は、前記脳波取得装置9の測定器9aによって取得された脳波から、被施療者の早い眼球動作(瞬き)によって生じる動作ノイズの存在を判定する判定部42と、前記脳波から、その動作ノイズ成分を除去する除去処理部43とを有している。
【0078】
なお、使用者がマッサージを受ける前の安静状態で脳波取得中の使用者が、又は、施療子6によるマッサージ動作中で脳波取得中の使用者が、ゆっくりと眼球動作を行うと、取得できる脳波に緩やかな変動が発生する。そこで、動作ノイズ除去部26は、測定器9aが取得した脳波から、時間領域における緩やかな脳波の変動を除去するトレンド除去部41を有していてもよい。トレンド除去部41は、脳波取得装置9が取得したオリジナルの脳波を移動平均処理すると共に、この移動平均処理した脳波を、脳波取得装置9が取得したオリジナルの脳波から差し引く処理を行う。このトレンド除去部41により、脳波のゆるやかな変動を除去することができ、この場合、変動を除去した脳波の信号に基づいて前記判定部42によって動作ノイズの存在の判定が行われ、除去処理部43によってその動作ノイズの除去が行われる。
【0079】
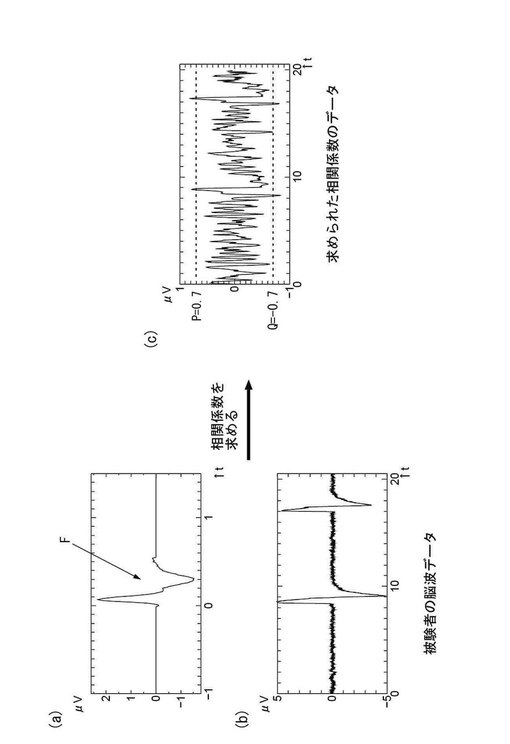
判定部42は、脳波取得装置9の測定器9aによって所得された脳波又はトレンド除去部41によって変動が除去された脳波(以下、これらを処理対象脳波という)に基づく時系列信号(波形)と、使用者の早い眼球動作(瞬き)によって生じる動作ノイズの波形雛形とを比較することで、その動作ノイズの存在を判定する。
図10は、判定部42の機能を説明する説明図である。(一般的な)使用者の瞬きによって生じる動作ノイズの波形雛形を、図10(a)に示す波形Fとすることができる。この雛型波形Fは、被施療者が瞬きを行うことにより脳波取得装置9が予め取得することができ、この雛型波形Fを判定部42は記憶している。
【0080】
判定部42は、この雛型波形Fをテンプレートとして、前記処理対象脳波との相関係数を求めることにより、当該処理対象脳波から動作ノイズの存在を判定する。なお、前記相関係数は、一般的に知られているように、二つの確率変数の間の類似性の度合いを示す統計学的指標であり、例えば−1から+1までの実数値を取り、この値が+1に近ければ正の高い相関があり、−1に近ければ負の高い相関があると言える。逆に、値がゼロに近いと相関が弱く、類似性が低いと言える。
【0081】
そこで、判定部42は、この相関係数を用いて雛型波形Fと処理対象脳波の波形との類似性を求め、この結果に基づいて、瞬きによる動作ノイズの存在を判定する。具体的な判定部42による処理は、図10(b)に示している処理対象脳波の時系列データを固定し、このデータに対して雛型波形Fを時間的に進めながら両者の相関係数を求める。図10(c)はこの処理によって得られた相関係数の波形を示している。図10(c)と図10(b)とを比較すると、処理対象脳波に存在している瞬き動作付近で、高い相関係数が得られている。そこで、判定部42は、相関係数が、所定の閾値P以上(及び/又は所定の閾値Q以下)、例えば、閾値P=+0.7以上(閾値Q=−0.7以下)であると判定した場合、高い相関であるとし、この場合を瞬きによる動作ノイズが発生している領域であると判定する。
このように、被施療者が瞬きをすると、脳波が特定の波形となることから、この判定部42によれば、処理対象脳波の波形と、予め設定された波形雛型Fとを比較することで、瞬きによる動作ノイズの存在を判定することができる。
【0082】
また、判定部42は、前記処理対象脳波の出力値と、予め設定された出力値についての閾値とを比較することで、瞬きによる動作ノイズの存在を判定してもよく、又は、この出力値についての閾値を用いた判定を行うと共に、前記相関係数を用いた判定を行ってもよい。
【0083】
また、判定部42は、動作ノイズが存在している領域(時間領域)の決定を行うこともできる。例えば、相関係数を用いた判定を行う場合、当該相関係数が、相関係数に関する前記閾値P,Qを超えた時点を挟んで、前の所定領域(時間領域)と後の所定領域(時間領域)とを、動作ノイズが存在している領域(時間領域)として決定することができる。例えば、前記前の所定領域(時間領域)を1秒とし、後の所定領域(時間領域)を1秒とすることができる。
しかし、インパルス状の動作ノイズの頂点と雛型波形Fの頂点とが重なった時点で、相関係数が最も大きくなることから、このインパルス状となる動作ノイズの頂点が発生する時点と、前記相関係数が前記閾値P,Qを超える時点とは僅かにずれる(例えば0.5秒ずれる)。このため、前記前の所定領域(時間領域)と後の所定領域(時間領域)は、ずれ時間が考慮されるのが良い。つまり、前の所定領域(時間領域)を0.5秒とし、後の所定領域(時間領域)を1.5秒とするのがよい。
【0084】
以上のようにして、判定部42が、処理対象脳波の中から動作ノイズの存在を判定すると、図9において、除去処理部43は、当該処理対象脳波の内の動作ノイズを含む領域を部分的に独立成分分析し、当該領域から動作ノイズの成分を除去する。つまり、脳波の信号を残したまま動作ノイズのみを除去する。
除去処理部43が独立成分分析を行うためには、複数組の電極10からの脳波(複数チャンネルの脳波)が必要となる。そこで、本実施形態では、瞬きによる眼の上下動作成分を検出するために、眼の上下に取り付ける第一の組みの電極10と、額と耳に取り付ける第二の組みの電極10とが設けられている。なお、眼球の左右動作成分も検出するために、眼の左右に取り付ける第三の組みの電極10が設けられていてもよい。
【0085】
前記独立成分分析は、後にも説明するが、元の信号が複数混合された信号から、元の信号それぞれを復元させる計算手段であり、除去処理部43は、この独立成分分析のためのプログラムが設定され当該プログラムを実行する機能を有している。
この独立成分分析を行う対象は、所定時間(例えば図8(c)では20秒間)について得られた処理対象脳波の内の、前記判定部42によって決定された、動作ノイズが存在している領域(時間領域)のみである。なお、図8(c)では、領域K1,K2,K3の時間領域が、判定部42によって決定されたものであり、領域K1と領域K2と領域K3との三つの領域のみが、独立成分分析の対象となる。
【0086】
これにより、領域K1,K2,K3それぞれについて、信号に動作ノイズが含まれていない領域k1,k2,k3を得ることができる。そして、除去処理部43は、動作ノイズが含まれていた領域K1,K2,K3を、動作ノイズが含まれていない領域k1,k2,k3に差し替える処理を行う。つまり、除去処理部43は、瞬きによる動作ノイズが含まれている領域を、当該ノイズ成分が除去されたものに差し替える処理を行う。
【0087】
図11(a)は、図8(c)の脳波信号について、差し替える処理を行い動作ノイズが除去された脳波信号を示しており、図11(b)はそのパワースペクトルを示している。図11(a)に示しているように、インパルス状の動作ノイズが除去されていることが判る。また、図11(b)のパワースペクトルは、図8(b)の安静閉眼時のパワースペクトルと似通っており、動作ノイズが除去されていることが判る。なお、20Hz及び40Hz付近のパワースペクトルは、マッサージ機(機械本体ユニット5)による電磁ノイズである。
【0088】
そして、図9において、除去処理部43によって差し替える処理が行われた時間領域の脳波信号は、脳波取得装置9の処理部9bが有するFFT演算部44によって、周波数領域に変換される。そして、処理部9bが有する帯域分離演算部45は、周波数領域に変換された信号からα波とβ波とを出力することができる。
【0089】
以上のような動作ノイズ除去部26によれば、処理対象脳波の内の動作ノイズを含む領域K1,K2,K3を部分的に独立成分分析し、当該動作ノイズの成分を除去した信号を取得することができるので、脳波の内の、動作ノイズを含まない領域(領域K1,K2,K3以外の領域)には、独立成分分析による影響を与えず、各種処理のために利用することができる。
そして、動作ノイズを含む領域K1,K2,K3については、当該動作ノイズの成分が除去された信号となるので、当該領域における脳波も各種処理のために用いることができる。つまり、動作ノイズがたとえ多くなったとしても、所定時間(図8では20秒間)取得された全脳波の信号に基づいて、適否推定部24がマッサージ動作の適否を推定したり、この脳波の出力特性が、複数のクラスC1,C2,C3の内のどのクラスに属するかを適否推定部24(クラス決定部24b)が決定したりできる。
【0090】
なお、仮に、全ての処理対象脳波(20秒間の脳波)を対象として独立成分分析すると、動作ノイズが含まれていない領域の信号にも、その影響を与えてしまう。さらに、独立成分分析にはある程度の処理時間を要することから、全ての処理対象脳波(20秒間の脳波)を独立成分分析すると、動作ノイズの除去処理に多くの時間がかかる。しかし、本実施形態では、部分的に独立成分分析を行えばよいので、動作ノイズの除去処理の時間の短縮が可能となる。
また、判定部42によって動作ノイズが含まれている領域を求め、当該領域を脳波から除去し(当該領域を空白とし)残りの領域により各種の処理を行ってもよいが、この場合、脳波取得時間帯に動作ノイズ(瞬き)が増えると、各種の処理を行うための信号が減少してしまい、この結果、脳波の取得時間を長くする必要がある。しかし、本発明の前記実施形態によれば、動作ノイズが増えても、処理するための信号の減少を防ぐことができ、脳波の取得時間を増やす必要はない。
【0091】
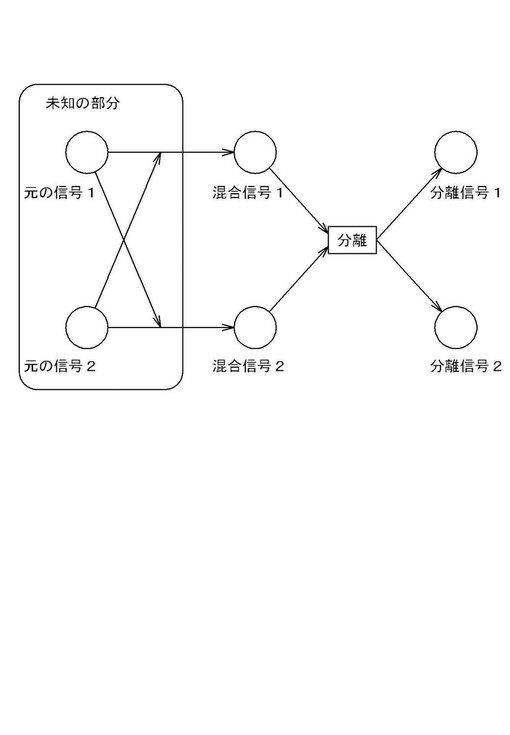
独立成分分析について説明する。図12は独立成分分析の概念図である。元の信号を、s1(t)・・・sN(t)とし、観測された信号を、x1(t)・・・xM(t)、混合過程の伝達特性をAとすると、混合過程は式(13)となる。
【数13】
したがって、伝達特性Aを求めることにより、元の信号を復元することが可能となる。なお、本実施形態では、元の信号は、動作ノイズの信号と、動作ノイズを含まない脳波の信号とであり、観測された信号は、処理対象脳波の信号である。
【0092】
元の信号を復元するために、非ガウス的であり、互いに独立でなければならないという条件が設定されている。そして、元の信号を復元するために、不動点法を用いている。
統計的独立とするために白色化を行う。白色化は以下の手順で行われる。信号Xが与えられた際、共分散行列をE(XXT)とし、式(14)のように特異値分解を行う。
【数14】
【0093】
ここで、eは直交行列、Dは対角行列である。白色化するための変数をMとすると、Mは式(15)となる。
【数15】
Z=MXとして共分散を求めると式(16)となる。このように、共分散が単位行列となるため信号Xは変数Mによって白色化される。
【数16】
【0094】
次に、白色化された信号を、式(17)を用いて不動点法を行う。Wiを設定し、初期値Wi(0)をランダムに決定し、式(18)となるように標準化を行い、更新式(19)を行う。
【数17】
【数18】
【数19】
【0095】
式(19)の実行後に、i>1であった場合、式(20)によって射影を行う。
【数20】
【0096】
ここで、Biは、最終的に求められるべき直交行列である。更新式(19)の実行と射影後に、式(21)が1に十分近ければ操作を終了して次の列へ、それ以外であればk=k+1として操作を繰り返す。最終的に求められたBを用いると、式(22)となり、元の信号を求めることができる。
【数21】
【数22】
【0097】
前記実施形態では、動作ノイズ除去部26は、脳波取得装置9が取得した脳波(処理対象脳波)から、使用者の動作に起因する動作ノイズを除去する場合を説明したが、動作ノイズ除去部26は、マッサージ機(機械本体ユニット5)が動作して使用者が揺さぶられ、電極10に繋がっているリード線が振れることによる動作ノイズを除去することもできる。
【0098】
〔5 適否推定部のさらなる機能〕
前記〔2.4 マッサージ動作の適否の推定〕で説明したように、前記接触力調整部23によって接触力(接触力目標値)が求められると、当該接触力(接触力目標値)により実際に施療子6によってマッサージ動作が行われ、前記適否推定部24は、このマッサージ動作が行われた際に脳波取得装置9から取得された脳波に基づいて、当該マッサージ動作の適否を推定することができる。この適否推定部24による推定処理は、脳波取得装置9によって取得された脳波(前記動作ノイズ除去部26によって動作ノイズが除去された脳波)のα波及びβ波に基づいて、マッサージ動作の適否の推定として、快適又は不快の判定を行う。つまり、前記実施形態では、適否推定部24は、分類されたクラス毎に設定されているニューラルネットワークを用いてマッサージ動作の適否の推定を行った。
ここでは、適否推定部24は、異なる手段によりマッサージ動作の適否を推定することの説明を行う。図13は、マッサージ動作の適否を推定するフロー図である。
【0099】
〔5.1 マッサージ動作の適否を推定(その2)〕
前記のとおり、脳波取得装置9により使用者の脳波として快適時に発生するα波と不快時に発生するβ波とを取得することができる。そこで、代表的な使用者に対して快適となるマッサージ動作を施療子6によって行い、当該使用者から脳波に基づく値(α波及びβ波)を予め所定時間について取得する。所定時間は、例えば10秒×n(n:1,2,3・・・)とすることができる。
そして、適否推定部24は、取得した脳波に基づく値に関して、ある時間(例えば10秒)毎に移動平均処理を行い、この移動平均処理を行った脳波に基づく値(α波及びβ波)それぞれに関して、ある時間(例えば10秒)を1区間として区間毎の平均値(又は標準偏差)を求める。なお、以下において、具体的に主体を記載しない処理については適否推定部24が行う処理である。
【0100】
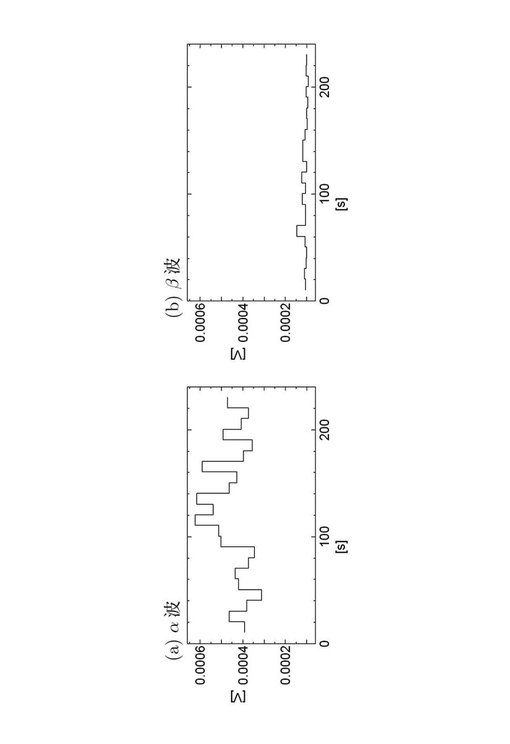
この処理を、複数の代表的な使用者についても行い、全使用者についての区間毎の平均値(又は標準偏差)をさらに求める。これにより、各区間における平均的なデータが得られ、この平均的なデータを閾値として、適否推定部24は記憶する。このようにして得られた、各区間の平均的なデータを図14に示しており、(a)はα波に関する値であり、(b)はβ波に関する値である。
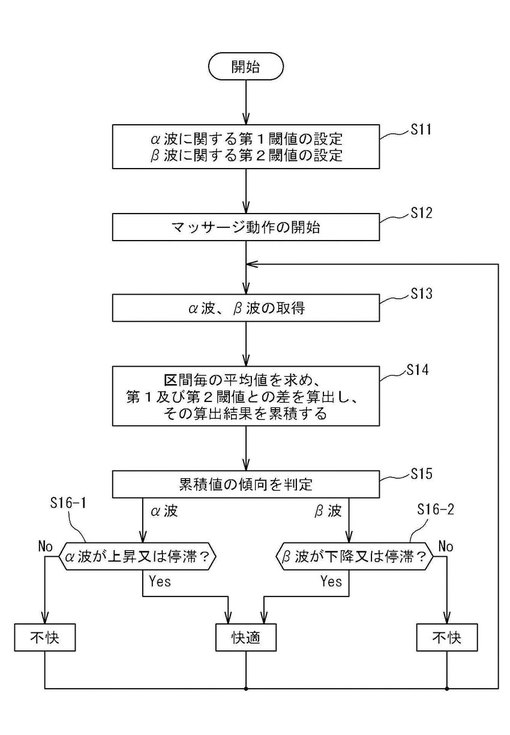
そして、快適時に発生するα波に関しての各区間の平均的なデータ(図14(a))が第一閾値として設定され、不快時に発生するβ波に関しての各区間の平均的なデータ(図14(b))が第二閾値として設定される(図13のステップS11)。これら第一閾値及び第二閾値は、一般的な使用者の平均的な脳波であるといえる。
【0101】
そして、施療子6により実際にマッサージ動作が開始されると(ステップS12)、脳波取得装置9は、使用者から脳波に基づく値としてα波及びβ波を取得する(ステップS13)。適否推定部24は、マッサージ動作中に取得されたα波及びβ波それぞれに関して、第一及び第二閾値を求めるために採用した前記1区間と同じ時間(例えば10秒)を1区間と設定し、区間毎の平均値を求める(ステップS14)。さらに、マッサージ動作中に取得されたα波及びβ波それぞれに関しての区間毎の平均値と、同じ区間での第一及び第二の閾値との差(差分値)を算出して、その算出結果の累積(累積差分値)を求める(ステップS14)。
【0102】
適否推定部24は、この累積差分値の傾向、つまり、累積差分値の時間的変化を判定し、その判定結果に基づいて快適又は不快の推定を行う(ステップS15)。つまり、α波及びβ波のそれぞれの累積差分値が、上昇しているか又は下降しているか又は停滞しているかを判定する。そして、α波に関して累積差分値が上昇又は停滞であれば快適と推定し(ステップS16−1のYes)、下降であれば不快と推定する(ステップS16−1のNo)。また、β波に関しては累積差分値が下降又は停滞であれば快適と推定し(ステップS16−2のYes)、上昇であれば不快と推定する(ステップS16−2のNo)。なお、累積差分値の上昇又は下降などは、各区間の累積差分値を直線近似して当該直線の傾きを求めることで判別することができる。
【0103】
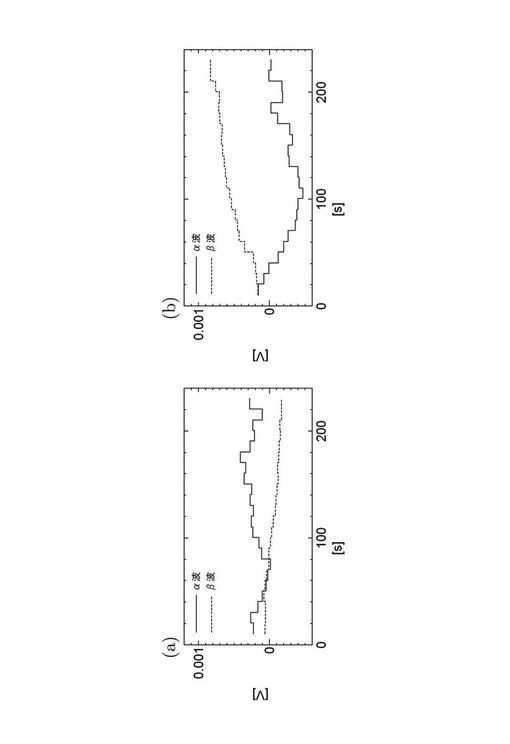
図15(a)は、α波及びβ波それぞれに関して、横軸を時間、縦軸を累積差分値として表したグラフであり、ある使用者に対して施療子6によりマッサージ動作を行って得た脳波によるものである。この図15(a)によれば、α波の累積差分値が、始めから最後まで全体的に停滞(横ばい)となっており、β波の累積差分値は、下降傾向にある。このため、適否推定部24は、始めから終わりまで快適であると判定することができる。
図15(b)は、他の使用者によるグラフである。α波の累積差分値は、始め降下しているが、途中より(100秒後)上昇傾向にある。β波の累積差分値は、終始、上昇傾向にある。このため、適否推定部24は、少なくとも始めから途中までは、不快であると判定することができる。
【0104】
以上のように、本実施形態の適否推定部24は、快適である場合に得られる脳波に関する閾値と、脳波取得装置9から所定時間毎(区間毎)に取得された脳波との差分値、及び、当該差分値を累積した累積差分値を求め、当該累積差分値の時間経過に伴う増減の傾向を判定することにより、施療子6によるマッサージ動作の適否を推定している。
なお、脳波に基づいて快適又は不快の推定を行う場合において、短時間(例えば10秒以内)毎の脳波により快適又は不快の推定を行えば、その時点でのマッサージ動作の適否を推定することができるが、本実施形態では、快適又は不快の継続性(持続性)の観点からマッサージ動作の適否を推定することができる。つまり、快適なマッサージがされていても、慣れてしまい快適の度合いが減少し、やがて不快へと変化するような場合に、本実施形態の適否推定部24によれば、マッサージ動作の適否を推定することができる。
【0105】
以上、本発明のマッサージ機は、図示する形態に限らず本発明の範囲内において他の形態のものであっても良い。例えば、図1において、脚載せ部3が省略された椅子型マッサージ機であってもよい。また、機械本体ユニット5も図示した以外の構成であってもよい。
また、前記実施形態では、機械本体ユニット5の一部として施療子6を被施療部に接触させ、皮膚弾性係数を推定する場合を説明したが、マッサージ機は施療子6以外に被施療部に接触する突出子を有し、この突出子の変位情報に基づいて皮膚弾性係数を推定してもよい。
また、被施療部に接触させるマッサージ具(施療子6)を有し当該マッサージ具(施療子6)にマッサージ動作を行わせるマッサージ機構部を、本実施形態では、背凭れ部2内に設けた機械本体ユニット5として説明したが、これ以外であってもよく、マッサージ機構部は、マッサージ機の内の使用者の身体を支持する部分、例えば、背凭れ部2全体をマッサージ機構部としてもよい。
【符号の説明】
【0106】
5:機械本体ユニット(マッサージ機構部)、 6:施療子(マッサージ具)、 9:脳波取得装置(脳波取得部)、 18:制御装置(制御部)、 21:弾性特性推定部、 22:記憶部、 23:接触力調整部(調整部)、 24:適否推定部、 24a:設定部、 24b:クラス決定部、 24c:推定本体部、 25:更新部、 26:動作ノイズ除去部、 F:雛型波形
【技術分野】
【0001】
本発明は、マッサージ機及びマッサージシステムに関する。
【背景技術】
【0002】
施療子等のマッサージ具を有するマッサージ機には、その効果を高めるために、マッサージ具による負荷の強弱を調整できるものがある。負荷の強弱を調整するためには、例えば施療子の押出量を変更すればよく、施療子を使用者側へ大きく押し出すことで強いマッサージが得られ、施療子の押出量を小さくすることで弱いマッサージが得られる。
【0003】
しかし、マッサージ感は、施療子の押出量だけでなく、使用者の身体のマッサージされる部位(被施療部)の状態にも影響する。すなわち、比較的柔らかい(皮膚弾性が小さい)被施療部に対してマッサージする場合、柔らかく弾性のある施療子でマッサージすべきである。そうしなければ、実際に施療子から被施療部に与えられる力は、予期した力より過大となり、使用者にとっては強いマッサージとなる。
一方、比較的硬い(皮膚弾性が大きい)被施療部に対してマッサージする場合、硬い施療子でマッサージすべきである。そうしなければ、実際に施療子から被施療部に与えられる力は、予期した力より過小となり、使用者にとっては弱いマッサージとなる。
【0004】
しかし、施療子を柔らかくしたり硬くしたりすることは、施療子の交換を伴うため、現実的ではない。そこで、施療子を柔らかくしたり硬くしたりすることと等価な手段として、特許文献1に記載のマッサージ機がある。
このマッサージ機では、施療子の変位情報に基づいて被施療部の皮膚弾性特性を推定し、この推定した皮膚弾性特性と、所定の参照情報(参照データベース)とに基づいて、被施療部に施療子を接触させる力(目標接触力)を求めている。そして、この力に相当する出力でマッサージ動作を施療子に実行させる。
【0005】
前記所定の参照情報は、被施療部の皮膚弾性特性と、その皮膚弾性特性である場合に使用者が快適であると感じるであろう接触力との関係を表したデータベースである。つまり、参照情報は、皮膚弾性特性が判ればそれに適した接触力を求めることができるように、予め設定されマッサージ機に記憶させた情報である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−93404号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
前記参照情報は、被施療部の皮膚弾性特性と、当該被施療部に施療子を接触させた際に快適であると感じるであろう接触力との関係を、例えば代表的な複数の使用者から取得し平均化して求めることができる。しかし、この参照情報は、あくまでも代表的な複数の使用者から求められたに過ぎず、万人に最適であるとは言えない。
また、マッサージ機の使用者が限定的である場合、当該使用者それぞれの参照情報を取得し、それをマッサージ機に記憶させてもよい。しかし、この場合、新たに使用者が増えると、その使用者に適合する参照情報が存在しているか否かは定かではない。
【0008】
そこで、使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現することが可能となるマッサージ機及びマッサージシステムを提供することを目的とする。
【課題を解決するための手段】
【0009】
(1)本発明のマッサージ機は、使用者の被施療部に接触させるマッサージ具を有し当該マッサージ具にマッサージ動作を行わせるマッサージ機構部と、前記マッサージ機構部の動作を制御する制御部と、前記使用者の脳波を取得する脳波取得部とを備え、前記制御部は、前記マッサージ機構部の一部が前記被施療部に接触している際の情報に基づいて当該被施療部の弾性特性を推定する弾性特性推定部と、被施療部の弾性特性と前記マッサージ具を当該被施療部に接触させる接触力との関係についての参照情報を記憶している記憶部と、前記弾性特性推定部によって推定された弾性特性と前記参照情報とに基づいて前記接触力を求める調整部と、前記調整部によって求められた前記接触力により前記マッサージ動作が行われた際に、前記脳波取得部から取得された脳波に基づいて当該マッサージ動作の適否を推定する適否推定部と、前記適否推定部による推定結果に基づいて前記参照情報を更新する更新部とを有していることを特徴とする。
【0010】
本発明によれば、弾性特性推定部が、使用者の被施療部の弾性特性を推定すると、調整部は、推定された弾性特性と記憶部が記憶している参照情報とに基づいて、マッサージ具を当該被施療部に接触させる接触力を求める。この際、ある使用者にとって、推定された弾性特性と前記参照情報とに基づいて求められた接触力が、相応しくない場合もあり得る。しかし、このような場合であっても、当該接触力によりマッサージ動作が行われた際に脳波取得部によって取得された前記ある使用者の脳波に基づいて、適否推定部が当該マッサージ動作の適否を推定し、その推定結果に基づいて更新部が参照情報を更新する。このため、その後、調整部によって求められる接触力は、更新された参照情報に基づいて求められるので、相応しい接触力に近づけることが可能となる。
【0011】
このように、被施療部の弾性特性と接触力との関係についての参照情報が、始めは、ある使用者に対して適していなくても、当該参照情報を、当該ある使用者に適合するように更新することができ、使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現することが可能となる。
なお、ある使用者にとって、推定された弾性特性と参照情報とに基づいて求められた接触力が、相応しくないことが生じる原因としては、例えば、使用者の体格差(太っている・痩せている等の身体的特徴差)が存在するためや、同じ使用者であってもマッサージ機を使用する日の体調差によるためであると考えられる。
【0012】
また、前記のとおり、適否推定部は、取得された使用者の脳波に基づいてマッサージ動作の適否を推定するが、一般的に脳波は使用者毎に出力特性が異なるため、推定結果に誤差が生じる場合もある。
(2)そこで、前記適否推定部は、脳波の出力特性についての相関に基づいて分類された複数のクラスそれぞれに対応付けられた入出力数学モデルが設定されている設定部と、前記脳波取得部によって取得された使用者の脳波の出力特性が、前記複数のクラスの内のどのクラスに属するかを決定するクラス決定部と、前記脳波取得部によって取得された使用者の脳波を入力として、前記クラス決定部によって決定されたクラスに対応付けられている前記入出力数学モデルを用いて出力した出力情報により前記マッサージ動作の適否を推定する推定本体部とを有している構成とすればよい。
この場合、推定するために用いられる入出力数学モデルは、脳波の出力特性についての相関に基づいて分類された複数のクラスそれぞれに対応付けられたものであり、取得された使用者の脳波の出力特性はどのクラスに属するかがクラス決定部によって決定され、当該決定されたクラスに対応付けられている入出力数学モデルが用いられるため、使用者毎に脳波の出力特性が異なることによる問題点の発生を抑制することができる。すなわち、脳波からマッサージ動作の適否を推定する精度を高めることが可能となる。
【0013】
また、適否推定部は、取得された使用者の脳波に基づいてマッサージ動作の適否を推定するが、脳波は非線形的な特性を有するため、推定結果に誤差が生じる場合もある。
(3)そこで、前記入出力数学モデルを、ニューラルネットワークとすればよく、この場合、脳波が、非線形的な特性を有することによる問題点の発生を抑制することができる。すなわち、脳波からマッサージ動作の適否を推定する精度を、より高めることが可能となる。
【0014】
また、前記のとおり、ある使用者にとって、被施療部の推定された弾性特性と前記参照情報とに基づいて求められた接触力が、相応しくないことが生じる原因として、使用者の体格差が考えられる。
(4)そこで、前記記憶部は、使用者の代表的な体格毎の参照情報を複数種類について記憶し、前記調整部は、実際に使用する使用者の体格に応じて前記複数種類の参照情報から選択された参照情報と、前記弾性特性推定部によって推定された弾性特性とに基づいて前記接触力を求める構成とすればよい。
この場合、代表的な体格毎の参照情報が複数種類について記憶されている中から、実際にマッサージ機を使用する使用者の体格に応じた参照情報が選択される。そして、この選択された参照情報と、弾性特性推定部によって推定された弾性特性とに基づいて接触力を求めるので、体格から判断して、できるだけ相応しいであろう参照情報を使用することができ、そして、前記のとおり、この参照情報を前記更新部が更新することができ、参照情報は使用者にとって、より相応しいものとすることが可能となる。
【0015】
また、前記(1)に記載のマッサージ機では、脳波取得部によって取得された脳波に基づいて、適否推定部がマッサージ動作の適否を推定し、また、前記(2)に記載のマッサージ機では、脳波取得部によって取得された使用者の脳波の出力特性が、複数のクラスの内のどのクラスに属するかを、クラス決定部は決定するが、これら(1)(2)のように取得される脳波に、使用者の動作に起因する動作ノイズが含まれていると、正確な推定及び正確な決定がされないおそれがある。
(5)そこで、前記脳波取得部が取得した脳波から、使用者の動作に起因する動作ノイズを除去する動作ノイズ除去部を有し、前記動作ノイズ除去部は、前記脳波取得部が取得した脳波の中から動作ノイズの存在を判定し、当該脳波の内の動作ノイズを含む領域を部分的に独立成分分析し、当該動作ノイズの成分を除去する構成とすればよい。
この場合、動作ノイズを含む領域を部分的に独立成分分析し、当該動作ノイズの成分を除去するので、脳波の内の、動作ノイズを含まない領域には、当該独立成分分析による影響を与えず、各種処理のために利用することができる。そして、動作ノイズを含む領域については、当該動作ノイズの成分が除去されるので、当該領域における脳波も各種処理のために用いることができる。このため、動作ノイズがたとえ多くなったとしても、適否推定部は多くの脳波に関する信号から、マッサージ動作の適否を推定することができ、また、クラス決定部は複数のクラスの内のどのクラスに属するかを決定することができる。
【0016】
(6)そして、動作ノイズの存在を正確に判定する手段として、前記動作ノイズ除去部は、前記脳波取得部が取得した脳波に基づく信号と、前記動作ノイズについての予め設定された波形雛型とを比較することで、動作ノイズの存在を判定すればよい。
【0017】
(7)また、前記各マッサージ機において、前記適否推定部は、快適である場合に得られる脳波に関する閾値と、前記脳波取得部から所定時間毎に取得された脳波との差分値、及び、当該差分値を累積した累積差分値を求め、当該累積差分値の増減に基づいて、前記マッサージ動作の適否を推定するのが好ましい。
この場合、時間経過に伴うマッサージ動作の適否を推定することができる。
【0018】
(8)また、本発明のマッサージシステムは、使用者の脳波を取得する脳波取得部と、使用者の被施療部の弾性特性を推定する弾性特性推定部と、被施療部の弾性特性と当該被施療部を押圧する押圧力との関係についての参照情報を記憶している記憶部と、前記弾性特性推定部によって推定された弾性特性と前記参照情報とに基づいて前記押圧力を求める調整部と、前記調整部によって求められた前記押圧力によりマッサージが行われた際に、前記脳波取得部から取得された脳波に基づいて当該マッサージの適否を推定する適否推定部と、前記適否推定部による推定結果に基づいて前記参照情報を更新する更新部と、を有していることを特徴とする。
【0019】
本発明によれば、弾性特性推定部が、使用者の被施療部の弾性特性を推定すると、調整部は、推定された弾性特性と記憶部が記憶している参照情報とに基づいて、被施療部を押圧する押圧力を求める。この際、ある使用者にとって、推定された弾性特性と前記参照情報とに基づいて求められた押圧力が、相応しくない場合もあり得る。しかし、このような場合であっても、当該押圧力によりマッサージが行われた際に、脳波取得部によって取得された前記ある使用者の脳波に基づいて、適否推定部が当該マッサージの適否を推定し、その推定結果に基づいて更新部が参照情報を更新する。このため、その後、調整部によって求められる押圧力は、更新された参照情報に基づいて求められるので、相応しい押圧力に近づけることが可能となる。
【0020】
このように、被施療部の弾性特性と押圧力との関係についての参照情報が、始めは、ある使用者に対して適していなくても、当該参照情報を、当該ある使用者に適合するように更新することができ、使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現することが可能となる。
【発明の効果】
【0021】
本発明によれば、被施療部の弾性特性と接触力(押圧力)との関係についての参照情報が、ある使用者に対して適していなくても、当該参照情報を、当該ある使用者に適合するように更新することができ、使用者それぞれで参照情報を用意しなくても、その使用者に適したマッサージを実現することが可能となる。
【図面の簡単な説明】
【0022】
【図1】本発明のマッサージ機の実施の一形態の概略構成を示している側面図である。
【図2】機械本体ユニットの正面斜視図である。
【図3】マッサージ機の概略構成を示しているブロック図である。
【図4】マッサージ機の簡略モデル図である。
【図5】マッサージ動作の適否の推定処理の説明図である。
【図6】ニューラルネットワークの説明図である。
【図7】制御装置による処理を説明するフロー図である。
【図8】使用者から取得された脳波と、その脳波のパワースペクトルを示しているグラフである。
【図9】動作ノイズ除去部の構成を説明するブロック図である。
【図10】動作ノイズ除去部の判定部の機能を説明する説明図である。
【図11】(a)は、動作ノイズが除去された脳波の信号を示しており、(b)はそのパワースペクトルを示している。
【図12】独立成分分析の概念図である。
【図13】マッサージ動作の適否を推定するフロー図である。
【図14】閾値設定の説明図である。
【図15】α波及びβ波それぞれに関して、横軸を時間、縦軸を累積差分値として表したグラフである。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を図面に基づいて説明する。
〔1. マッサージ機の全体構成〕
図1は本発明のマッサージ機の実施の一形態の概略構成を示している側面図である。このマッサージ機は、フレーム4と、フレーム4上に設けられ使用者が着座する座部1と、フレーム4の後側に設けられた背凭れ部2と、フレーム4の前側に設けられた脚載せ部3とを備えており、椅子型である。なお、この椅子型マッサージ機において、左右等の方向は、座部1に着座した使用者から見た方向であり、また、背凭れ部2においては、その幅方向を「左右方向」とし、その厚さ方向を「前後方向」とし、背凭れ部2の腰部から頭部へ向かう方向を「上下方向」とする。
【0024】
背凭れ部2内には施療子6を備えた機械本体ユニット(マッサージ機構部)5が設けられている。機械本体ユニット5は、背凭れ部2の内部を上下移動することができ、施療子6を使用者の被施療部(身体部分)に接触させ、当該施療子6にマッサージ動作を行わせることができる。
図2は、機械本体ユニット5の正面斜視図である。機械本体ユニット5の本体フレーム8にマッサージユニット7が前後移動可能に取り付けられている。
マッサージユニット7は、ローラからなる施療子(揉み玉)6と、この施療子6に揉み、叩き、指圧などのマッサージ動作をさせるために駆動する駆動部15とを有している。駆動部15は、施療子6に揉みや叩きの動作をさせる揉み叩き駆動部15bの他に、施療子6を含むマッサージユニット7を前後方向に移動させる押し出し駆動部15aを有している。図2の押し出し駆動部15aは、モータの回転によってマッサージユニット7を前後に移動させるラックピニオン式であるが、他の形式であってもよい。
【0025】
押し出し駆動部15aがマッサージユニット7を前後移動させることで、施療子6が前後移動して使用者の被施療部に対して指圧動作を行うことができ、さらに、揉みや叩きのマッサージを行う場合であっても、施療子6の前後方向の位置を調整することができる。施療子6の位置を前側(被施療部側)に移動させることで、当該施療子6によって被施療部に対して大きな力を与えることができ、強いマッサージが生じる。また、施療子6の位置を後側に移動させることで、施療子6によって小さな力を与えることができ、弱いマッサージが生じる。
【0026】
図3はマッサージ機の概略構成を示しているブロック図である。このマッサージ機は、制御装置18及び座部に着座した使用者の脳波を取得する脳波取得装置9を備えている。
脳波取得装置9は、座部に着座しているがマッサージを施療子6によって受ける前の使用者の脳波、又は、座部に着座してマッサージを受けている使用者の脳波を測定する測定器9aと、測定器9aが測定した脳波の信号を処理する処理部9bとを有している。測定器9aは、使用者の脳から生じる電気活動を測定するための陽極と陰極との電極10を有しており、電極10は、比較的装着が容易である額(陽極)−耳(陰極)の二カ所を一組として取り付けられる。また、図示しないが、グランド電極が額に取り付けられる。電極10の配置をさらに説明すると、陽極を左目上部付近(一般的にFp1と呼ばれる部分)とし、陰極を左耳とし、グランド電極を右目上部付近(一般的にFp2と呼ばれる部分)とする。
そして、電極10は、図1に示しているように、背もたれ部2のヘッドレスト部にリード線を介して設置することができ、これにより、ヘッドレスト部に頭部を凭れかけた使用者の脳波を測定することができる。なお、電極10は二組であってもよい。
【0027】
処理部9bは、図示しないが、アンプ、AD変換器及びコンピュータ部を有していて、測定器9aによって測定された脳波の信号は、処理部9bによって処理され、脳波の信号の内の、安静時(快適時)に発生すると言われているα波と不快時に発生すると言われているβ波との信号が処理部9bから出力される。
すなわち、処理部9bは、測定部9aが測定して得た脳波の信号についてFFTを用い、周波数毎のパワースペクトルを求め、それぞれの周波数帯(周波数帯の中央部)のパワースペクトルの総和によってα波のレベル、β波のレベルを求めている。そして測定部9aは、α波とβ波との変化率を示す指標として比(β波のレベル/α波のレベル;以下では(β/α)と記載する)を求めることができる。なお、本発明では、脳波のうち8Hz以上13Hz以下の周波数帯をα波とし、14Hz以上30Hz以下の周波数帯をβ波としている。
そして、処理部9bによって求められた脳波の信号に関する各値は、制御装置18に入力され、制御装置18によって処理される。なお、処理部9bの機能は、制御装置18が有していてもよい。
【0028】
〔2. 制御装置〕
制御装置18及び脳波取得装置9の処理部9bは、CPU及び記憶部を有しているプログラマブルなマイコンからなり、所定の各機能を実行するプログラムが記憶部に格納されている。制御装置18は、RAMやROMからなる記憶部22の他に、前記プログラムが実行する機能部として、弾性パラメータ設定部19、マッサージ制御部20、弾性特性推定部21、接触力調整部23、適否推定部24及び更新部25を備えている。また、脳波取得装置9の処理部9bは、動作ノイズ除去部26を備えている。各機能部については以下に説明する。
【0029】
前記マッサージ制御部20は、前記機械本体ユニット5(図2)の動作制御を行うことができ、例えば、押し出し駆動部15aに対して動作制御信号を出力することで当該押し出し駆動部15aを当該信号に応じて動作させ、施療子6(マッサージユニット7)の移動量及び施療子6(マッサージユニット7)の前後位置を制御することができる。
さらに、図3において、マッサージ制御部20は、施療子6の前後位置に関してインピーダンス制御を行うインピーダンス制御部としての機能を有している。マッサージ制御部20は、施療子6が使用者に加える接触力の目標値(目標接触力)Fhdが与えられると、その目標接触力Fhdに相当する力が使用者に加えられるようにインピーダンス制御する。マッサージ制御部20は、目標接触力Fhdに相当する所望の力に対応した押出量を決定して、押し出し駆動部15aによって施療子6を当該押出量について前後方向に移動させる。
このように、マッサージ制御部20が押し出し駆動部15aへ動作制御信号を与えると、押し出し駆動部15aは当該信号に基づいて動作し、施療子6に、被施療部に対する所望の接触力を発生させることができる。
【0030】
マッサージ制御部20の具体的な機能を説明する。マッサージ制御部20は、押し出し駆動部15aによる施療子6の前後方向の変位(位置)xuを取得することができる。なお、施療子6の変位量はマッサージユニット7の変位量と同じとなる。施療子6の変位は、マッサージ制御部20から押し出し駆動部15aが有しているモータ(図示せず)へ与えられる動作制御信号に基づいて、マッサージ制御部20内部で取得することができる。さらに、マッサージ制御部20は、施療子6の変位xuに基づいて、施療子6(マッサージユニット7)の移動速度、加速度を算出することもできる。
【0031】
図4は、マッサージ機の簡略モデルを示しており、前記のインピーダンス制御下における使用者の皮膚表面(被施療部)とマッサージユニット7との接触をバネ・ダンパで表現したものである。このモデル図では、水平線に対して角度θだけ傾斜した方向を、マッサージユニット7の前後方向としている。つまり、図4は、背凭れ部を後方へ倒したリクライニング状態を示しており、マッサージユニット7の前後方向と背凭れ部の前後方向とが一致している。
【0032】
〔2.1 弾性パラメータKdの決定〕
前記弾性パラメータ設定部19は、被施療部に接触している施療子6の変位情報(変位xu)等に基づいて、目標接触力Fhdを実現するための弾性パラメータKdを決定する機能を有している。図4において、被施療部の皮膚弾性特性及び皮膚粘性係数をそれぞれKh,Dhとし、マッサージユニット7が元々持つ機械的な弾性係数及び粘性係数をそれぞれKu,Duとし、インピーダンス制御の弾性パラメータ及び粘性パラメータをそれぞれKd,Ddとしている。
【0033】
さらに、使用者及びマッサージユニット7は、施療子6(マッサージユニット7)に対して重力による影響を与えている。つまり、背もたれ部2に使用者が凭れることにより、重力によって、この使用者の全体重のうちの一部(荷重Mh)が施療子6に対して影響を及ぼす。さらに、マッサージユニット7は、自身の重量Muの影響を受ける。マッサージユニット7の重量Mu及び使用者の体重は既知の値であり、この値は制御装置18に予め記憶される。なお、前記荷重Mhは、使用者の体重の例えば50%として設定される。
【0034】
マッサージユニット7(施療子6)の変位xuを用いたマッサージユニット7の運動方程式は、式(1)である。なお、マッサージユニット7の機械的な弾性係数Ku及び粘性係数Duを0としている。
【数1】
式(1)において、fsはマッサージユニット7(施療子6)自身が出力する力(制御入力)、Fhは被施療部からマッサージユニット7に加わる力、Fuはマッサージユニット7の重量による成分であり、Fu=−Mu・g・sinθである。
【0035】
また、マッサージユニット7がFhによって、式(2)の振る舞いをするためのマッサージユニット7(実際には押し出し駆動部15)への制御入力fsは、式(3)のようになる。
【数2】
【数3】
式(3)のfsが、インピーダンス制御による制御入力となる。ただし、式(2)(3)においてxdは、マッサージユニットの変位xuの目標位置(目標接触力Fhdに対応する位置)である。
【0036】
式(2)をKdについて解くと、式(4)となり、この式(4)によって、弾性パラメータ設定部19は、弾性パラメータを決定することができる。なお、式(4)では、式(2)のFhを、目標接触力Fhdに置き換えている。
【数4】
【0037】
〔2.2.1 被施療部の皮膚弾性特性の推定(その1)〕
次に、図4に示したモデルを基に、施療子6が被施療部より与えられる力Fhを検出するセンサ(力センサ)を用いることとなく、皮膚弾性特性を推定する方法を説明する。
マッサージユニット7から使用者の皮膚に加わる力は、作用反作用により、−Fhであるため、式(5)が得られる。xeは、Fh=0[N]となるxuの平衡位置(基準位置)である。
【数5】
【0038】
ここで、式(5)及び式(1),(3)により、Khについて解くと、式(6)となり、マッサージユニット7の変位・速度・加速度から、重力によって使用者から施療子6が受ける荷重の情報を考慮して、使用者の皮膚弾性特性Khの推定値が得られる。ただし、ヒトの粘性係数Dhは既知とする。
【数6】
【0039】
このように、弾性特性推定部21は、施療子6が被施療部に接触したときの当該施療子6の変位xuに基づいて、当該被施療部の皮膚弾性特性(弾性係数)Khを推定することができる。すなわち、皮膚弾性特性Khは、マッサージユニット7の慣性質量Md(ここでは、マッサージユニットの質量Muと等しく既知である)、インピーダンス制御の粘性パラメータDd(一定値)、インピーダンス制御の弾性パラメータKd、使用者の粘性特性Dh(一定値)、マッサージユニット7(施療子6)の変位xu、マッサージユニット7(施療子6)の目標位置xd、重力によって使用者から施療子6が受ける荷重などによって演算により求められる。なお、マッサージユニット7の速度、加速度、目標速度は、マッサージユニット7の変位xu、目標位置xdに基づいて、微分演算などにより算出することができる。
【0040】
〔2.2.2 被施療部の皮膚弾性特性の推定(その2)〕
施療子6が被施療部より与えられる接触力Fhを検出するセンサ(力センサ)を用いて皮膚弾性特性を推定する方法を説明する。この場合、マッサージ機は、使用者の皮膚表面に実際に加わっている力Fhを計測するセンサを備えている。このセンサは圧力センサとすればよいが、加速度センサとすることもできる。また、図2に示しているように、センサ30は、施療子6に設置してもよく、又は、施療子6を取り付けているアーム6aに設置してもよい。
図3において、前記弾性特性推定部21は、皮膚弾性特性Khの推定値を、式(6)ではなく、式(7)によって算出する。前記センサ30によって使用者の被施療部との間に加わっている力(接触力)Fhを計測する場合、式(4)及び式(6)から、式(7)が得られる。なお、式(7)では、式(4)のFhdをFhに変更している。
【数7】
【0041】
施療子6を被施療部へ所定の変位について押し込んだ際、マッサージユニット7は前後方向に停止した状態にあることから、マッサージユニット7の速度は0となり、また、(説明を容易とするために)背凭れ部2が垂直にあるとすればθ=0となる。この場合、式(7)が式(8)となる。式(8)の分母(xe−xu)は基準位置からのマッサージユニット7の変位を表す。また、分子のFhは、被施療部に加わっている力(接触力)であり、センサ30によって検出される値である。
【数8】
【0042】
以上の皮膚弾性特性の推定(その1)(その2)で説明したように、弾性特性推定部21は、マッサージ機の一部としての施療子6が所定の被施療部に接触している際の情報に基づいて、当該被施療部の皮膚弾性特性(皮膚筋系弾性特性)Khを推定することができる。すなわち、(その1)の場合、弾性特性推定部21は、施療子6の変位xuに関する情報に基づいて皮膚弾性特性Khを推定することができる。一方、(その2)の場合、弾性特性推定部21は、施療子6が受ける反力(接触力)Fhに関する情報に基づいて皮膚弾性特性Khを推定することができる。
なお、被施療部が凝っていると当該部分は硬くなっていることがあり、この場合、当該部分の皮膚弾性特性は高い値になると考えられる。一方、被施療部がほぐれていると、当該部分の皮膚弾性特性は低い値になると考えられる。
【0043】
〔2.3 接触力の調整〕
図3において、前記記憶部22には、被施療部の皮膚弾性特性Khと、施療子6を当該被施療部に接触させる目標接触力Fhdとの関係についての参照情報(参照データベース)DBが記憶されている。
この参照情報DBは、被施療部の皮膚弾性特性Khと、その皮膚弾性特性Khである場合に使用者が快適であると感じるであろう接触力との関係を表したデータベースである。つまり、参照情報DBは、皮膚弾性特性Khが判ればそれに適した接触力を求めることができるように予め設定されている。
この参照情報DBは、例えば被施療部の皮膚弾性特性Khと、当該被施療部に施療子6を接触させた際に快適であると感じるであろう接触力とを、例えば代表的な複数の使用者から取得し平均化して求めることができる。
【0044】
この参照情報DBを接触力調整部23が参照することができ、接触力調整部23は、弾性特性推定部21によって推定された被施療部の皮膚弾性特性と、当該参照情報DBとに基づいて、施療子6を当該被施療部に接触させる接触力を、目標接触力Fhdとして求める。そして、この目標接触力Fhdを制御入力として、前記マッサージ制御部20は施療子6によるマッサージ動作を制御することができる。
このように、本実施形態のマッサージ機では、使用者の皮膚弾性特性Khの推定値に応じて、接触力の目標値、すなわち、使用者に印加される力が設定され、好適なマッサージを与えることができる。
【0045】
参照情報DBは、前記のとおり、皮膚弾性特性Khが判ればそれに適した接触力を求めることができるように予め設定されたものであるが、ある使用者にとって、推定された皮膚弾性特性Khと前記参照情報DBとに基づいて求められた接触力が、相応しくないことが生じることがある。これは、例えば使用者の体格差(例えば、太っている、痩せている等の身体的特徴)によって生じると考えられる。
そこで、本実施形態では、使用者の代表的な体格毎の参照情報が複数種類について設定されていて、記憶部22は複数種類の参照情報DB1,DB2,DB3を記憶している。
【0046】
そして、マッサージ機が有している操作装置31(図1及び図3参照)には、使用者の体格を入力するボタン等の操作部31aが設けられており、実際にマッサージ機を使用する使用者は、この操作部31aを操作して制御装置18に自己の体格を入力する。
すると、接触力調整部23は、入力された使用者の体格に応じて、前記複数種類の参照情報DB1,DB2,DB3の中から、最も近似する体格として設定されている参照情報を選択し、選択された参照情報と、弾性特性推定部21によって推定された皮膚弾性特性とに基づいて接触力を求める処理を行う。
このように、体格差に応じて複数種類の参照情報DB1,DB2,DB3が設定されていることで、実際にマッサージ機を使用する使用者の体格から判断して、できるだけ相応しいであろう参照情報を使用することができる。
【0047】
〔2.4 マッサージ動作の適否の推定〕
接触力調整部23によって接触力(接触力目標値Fhd)が求められると、施療子6により当該接触力(接触力目標値Fhd)を生じさせるマッサージ動作が前記マッサージ制御部20の制御によって実際に行われるが、前記適否推定部24は、このマッサージ動作が行われた際に脳波取得装置9から取得された脳波に基づいて、当該マッサージ動作の適否を推定する機能を有している。この適否推定部24による推定処理は、脳波取得装置9によって取得された脳波の信号(α波のレベル及びβ波のレベル)に基づいて行われる。なお、マッサージ動作の適否の推定とは、当該マッサージ動作が快適であるのか、又は、不快であるのかを判定することである。
しかし、一般的に脳波(α波及びβ波)は使用者毎に出力特性が異なることが知られている。そこで、このような脳波を用いて高い推定精度を確保するために、本実施形態では、適否推定部24は図5に示している推定処理を行う。
【0048】
このために、適否推定部24は、設定部24a、クラス決定部24b及び推定本体部24cを有している(図3参照)。
設定部24aは、複数種類の入出力数学モデルとしてニューラルネットワークが設定され、そのためのプログラムを記憶し、このプログラムを実行する機能を有している。このニューラルネットワークは、脳波の出力特性についての相関に基づいて分類された複数のクラスそれぞれに対応付けられた数式モデルとして、設定部24aに設定されている。図5に示した本実施形態では、脳波の出力特性についての相関に基づいて3つのクラスC1,C2,C3に分類されており、同じクラス内では脳波の出力特性の相関が高くなるように分類されている。そして、クラスC1にニューラルネットワークN1が、クラスC2にニューラルネットワークN2が、クラスC3にニューラルネットワークN3が対応付けられて設定されている。
【0049】
クラスの分類は、複数の代表的な使用者それぞれが、座部1に座り、施療子6によるマッサージ動作が行われていない安静状態となり、この状態で脳波取得装置9によって取得された脳波に基づいて行われている。この際に取得される脳波は、各使用者が安静状態での信号であるが、同じ安静状態であっても使用者毎で出力される脳波(脳波の時間的変化)の傾向は様々である。このため、安静状態の脳波の傾向を基準としてクラスが分類される。
脳波取得装置9の処理部9bによって取得される脳波に関する値としては、ある時間帯で取得されたα波、β波、これらの比(β/α)であり、また、これらが正規化された値、平均値、分散、傾きである。これらの内の少なくとも一つが用いられて、クラス分類がK−means法によって行われる。なお、前記正規化された値は、α波、β波、これらの比それぞれが最大値で除算された値であり、傾きは、所定時間毎(例えば10秒毎)におけるα波、β波、これらの比の各値(平均値)を最小二乗法で直線化した場合に得られる直線の傾きである。
【0050】
K−means法によるクラス分類のアルゴリズムは、以下のとおりである。
<1>K個のクラスの代表値Vcをランダムに設定する(c=0,1・・・K)。
<2>全てのデータを最も近いVcを持つクラスに割り当てる。
<3>式(9)よりそれぞれのクラスのVcを算出する。
<4>すべてのクラスのVcが変化しなければ終了とし、変化があれば<2>以降を繰り返して実行する。
【数9】
なお、式(9)のNcは各クラスの個体数であり、Inpjは、j番目の入力(α波、β波、これらの比(β/α)それぞれの正規化された値、平均値、分散、傾きの内の少なくとも一つ)を示す。
【0051】
ニューラルネットワークN1,N2,N3それぞれは、図6に示しているように、誤差逆伝播法を用いた階層型ニューラルネットワークである。このニューラルネットワークを表現すると、入力層のノード番号をi、中間層をj、出力層をkとし、それぞれの総数をI,J,Kとし、入力層と中間層との間の重みをwm(i,j)とし、中間層と出力層との間の重みをwo(j,k)とし、入力をInpi、出力をOutk、中間出力をMidjとすると、n番目の中間出力をMidnは、式(10)となり、n番目の出力Outnは、式(11)となる。
【数10】
【数11】
【0052】
式(10)及び式(11)のfは、任意に固定された関数であり、本実施形態では、シグモイド関数f(x)=1/{1+exp(−x)}としている。また、重みの修正式は最急降下法を用い式(12)となる。Ekは、出力値と真値との誤差である。
【数12】
【0053】
そして、ニューラルネットワークN1,N2,N3それぞれにおいて、実際に施療子6によってマッサージ動作が行われた際に脳波取得装置9から取得された脳波に基づく値を、入力データとしており、出力データは不快を「0」、快適を「1」としている。入力データは、α波、β波、これらの比(β/α)が正規化された値、平均値、分散、傾きとすることができるが、後に説明するが、α波、β波、これらの比(β/α)の傾きとするのが好ましい。
【0054】
前記クラス決定部24bは、脳波取得装置9によって取得された使用者の脳波の出力特性が、前記複数のクラスC1,C2,C3(図5参照)の内のどのクラスに属するかを決定する処理を行う。なお、ここでの脳波取得装置9によって取得される脳波は、マッサージ動作前の安静状態のものである。すなわち、使用者が座部1に着座し、施療子6によるマッサージ動作が開始される前に取得された脳波である。この脳波が取得されると、クラス決定部24bは、当該脳波の傾向が、安静状態の脳波の傾向を基準として分類されているクラスC1,C2,C3の内のどのクラスに最も近似しているかの判定を行う。
【0055】
このクラス決定の判定は、取得された脳波の時系列データにより行われる。例えば、所定時間Δtについて脳波の時系列データが脳波取得装置9の処理部9bによって取得されたとする。時系列データには、α波、β波、これらの比(β/α)それぞれの正規化された値、平均値、分散、傾きが含まれている。
そして、単位時間毎の、α波、β波、これらの比(β/α)それぞれの正規化された値、平均値、分散、傾きに関する値と、クラスC1,C2,C3それぞれの代表値(α波、β波、これらの比(β/α)それぞれの正規化された値、平均値、分散、傾きの代表値)とを比較し、単位時間毎についてどのクラスC1,C2,C3に最も近似しているかを数学的手法により求める。そして、前記所定時間Δt全てについてこの数学的手法を行い、最も頻出したクラスを、最も近似しているクラスとして決定する。
取得された脳波の時系列データが最も近似しているクラスを、当該使用者が属するクラスとして決定する。
【0056】
このように、複数のクラスC1,C2,C3の内のどのクラスに属するかが決定されると、決定されたクラスに対応付けられたニューラルネットワークが用いられて、推定本体部24cによって、施療子6によるマッサージ動作の適否が推定される。
つまり、推定本体部24cは、クラス決定部24bによって決定されたクラスに対応付けられているニューラルネットワークを用いて出力した出力情報により、マッサージ動作の適否を推定する。なお、ここで入力される脳波は、脳波取得装置9によって取得された使用者のマッサージ状態での脳波である。そして、出力情報は、前記のとおり、不快は「0」であり、快適は「1」である。
【0057】
〔2.5 参照情報の更新〕
適否推定部24によって、マッサージ動作の快適又は不快が推定されると、更新部25は、適否推定部24による推定結果に基づいて前記参照情報DBを更新する処理を行う。
参照情報DBは、前記のとおり、被施療部の皮膚弾性特性Khと、その皮膚弾性特性Khの場合に使用者が快適であると感じるであろう接触力との関係を表した情報であるが、例えば、適否推定部24によって不快であると推定された場合、参照情報DBにおいて、ある皮膚弾性特性Khの場合に使用者が快適であると感じるであろう接触力を、前回値(初期値)よりも小さく設定し直す。これに対して、適否推定部24によって快適であると推定された場合、参照情報DBの更新を行わず、そのままの値(前回値(初期値))を後のマッサージ動作でも採用する。
なお、前記のとおり、本実施形態では、複数種類の参照情報DB1,DB2,DB3が設定されているので、更新部25によって更新される参照情報は、当然、複数種類の参照情報DB1,DB2,DB3の中から選択された(接触力の推定に用いられた)ものである。
【0058】
〔3. 制御装置によるマッサージ動作の適否の推定、及び、参照情報の更新の具体例〕
制御装置18の記憶部22には、参照情報DB1,DB2,DB3が記憶されており、また、適否推定部24の設定部24aには、分類された3つのクラスC1,C2,C3と、それぞれに対応付けられてニューラルネットワークN1,N2,N3が記憶されている。そして、図7は、制御装置18による処理を説明するフロー図である。
図3と図7とにおいて、使用者は、座部1(図1参照)に着座すると、自己の体格についての情報を操作装置31を介して制御装置18に入力する。制御装置18に入力された使用者の体格に応じて、接触力調整部23は、複数種類の前記参照情報DB1,DB2,DB3の中から、最も近似する体格として設定されている参照情報を選択する(図7のステップS1)。本実施形態では、DB1が選択されたとする。
【0059】
そして、脳波取得装置9によってマッサージを受ける前の使用者の安静状態での脳波が取得されると(ステップS2)、適否推定部24のクラス決定部24bは、取得された脳波の出力特性が、複数の前記クラスC1,C2,C3の内のどのクラスに属するかを決定する処理を行う(ステップS3)。本実施形態では、クラスC1が選択されたとする。また、各クラスにはニューラルネットワークが対応付けて設定されているので、選択されたクラスC1に対応するニューラルネットワークN1が用いられて、推定本体部24cによって、後にマッサージ動作の適否を推定することになる。
【0060】
前記ステップS2の後、駆動部15が駆動して施療子6によって実際のマッサージ動作が実行される(ステップS4)。本実施形態では、押し出し駆動部15aが駆動して施療子6が被施療部に接触し押圧するマッサージ動作が実行される。そして、弾性特性推定部21によって、使用者の被施療部の皮膚弾性特性(皮膚筋系弾性特性)Khが推定される(ステップS5)。なお、この推定処理は、前記〔2.2.1 被施療部の皮膚弾性特性の推定(その1)〕又は〔2.2.2 被施療部の皮膚弾性特性の推定(その2)〕で説明したように、施療子6が所定の被施療部に接触している際の情報に基づいて、当該被施療部の皮膚弾性特性Khを推定する。
【0061】
被施療部の皮膚弾性特性Khが推定されると、接触力調整部23は、ステップS1で選択された参照情報DB1とステップ5で推定された皮膚弾性特性Khとに基づいて、施療子6による接触力を求める処理を行う(ステップS6)。この接触力(目標接触力Fhd)が求められると、当該接触力(目標接触力Fhd)に相当する力が使用者に加えられるようにインピーダンス制御が、マッサージ制御部20によって実行される。
そして、適否推定部24は、このマッサージ動作が行われた際に脳波取得装置9から取得された脳波に基づいて、当該マッサージ動作の適否を推定する(ステップS7)。具体的には、適否推定部24の推定本体部24cは、ステップS3で決定されたクラスC1に対応付けられているニューラルネットワークN1を用いて出力した出力情報により、マッサージ動作の適否を推定する。
このニューラルネットワークN1に入力される脳波は、前記マッサージ動作中に脳波取得装置9が使用者から取得したマッサージ状態での脳波である。このニューラルネットワークN1の出力情報として「0」が出力されると当該マッサージ動作は不快であると推定され、「1」が出力されると当該マッサージ動作は快適であると推定する。
なお、不快であると推定される原因としては、前記のとおり、皮膚弾性特性に基づいて接触力を決定するための参照情報DB1は、代表的な使用者から取得されたものであり、万人向けではないことが考えられるためである。つまり、今回の使用者には相応しいものではなかったと考えられる。
【0062】
マッサージ動作が快適(出力情報が「1」)であると推定されると(ステップS8でYesの場合)、更新部25は、参照情報DB1を更新しない(ステップS9)。そして、マッサージ動作は継続して実行されているので、前記ステップS5に戻り、施療子6が引き続いて同じ被施療部又は他の被施療部に接触している際の情報に基づいて、弾性特性推定部21は、当該被施療部の皮膚弾性特性Khを推定する。そして、更新されなかった参照情報DB1に基づいて接触力が求められ(ステップS6)、継続中のマッサージ動作の適否が再び推定される(ステップS7)。以上のように、制御装置18は各種処理を繰り返し実行する。
【0063】
これに対して、前記マッサージ動作が不快(出力情報が「0」)であると推定されると(ステップS8でNoの場合)、更新部25は参照情報DB1を更新する(ステップS10)。そして、この場合であっても、マッサージ動作は継続して実行されているので、前記ステップS5に戻り、施療子6が引き続いて同じ被施療部又は他の被施療部に接触している際の情報に基づいて、弾性特性推定部21は、当該被施療部の皮膚弾性特性Khを推定する。そして、更新された参照情報DB1に基づいて接触力が求められ(ステップS6)、再び継続中のマッサージ動作の適否が推定される(ステップS7)。
【0064】
ここで、ステップS10では参照情報が更新されているので、当該更新済みの参照情報(DB1−(1))は、代表的な使用者から取得された初期の参照情報(DB1−(0))よりも、今回の使用者に対してより適したものに近づいている。このため、たとえ2回目(さらには2回目以降)の適否の推定(ステップS7)で不快と判定されても、参照情報DB1を判定毎に更新すれば、使用者に対してより適したものに更新され、今回の使用者の皮膚弾性特性Khに対して、いずれ適した接触力を得ることができるようになる。
このようなことから、参照情報DBを、想定されている全ての使用者毎に設定しなくても済み、さらには、不特定多数の使用者が使用するマッサージ機であっても対応することができる。本実施形態では、体格差に基づいて設定された3種の参照情報DB1,DB2,DB3でよい。
【0065】
以上のように、本実施形態のマッサージ機によれば、弾性特性推定部21が、使用者の被施療部の皮膚弾性特性Khを推定すると、接触力調整部23は、推定された皮膚弾性特性Khと記憶部22が記憶している参照情報DB1とに基づいて、施療子6を当該被施療部に接触させる接触力を求める。この際、ある使用者にとって、被施療部の推定された皮膚弾性特性Khと参照情報DBとに基づいて求められた接触力が、相応しくない場合もあり得る。しかし、このような場合であっても、当該接触力によりマッサージ動作が行われた際に脳波取得装置9によって取得された当該ある使用者の脳波に基づいて、適否推定部24が当該マッサージ動作の適否を推定し、その推定結果に基づいて更新部25が参照情報DB1を更新する。このため、その後、接触力調整部23によって求められる接触力は、更新された参照情報に基づいて求められるので、相応しい接触力に近づけることが可能となる。
【0066】
このように、被施療部の皮膚弾性特性Khと接触力との関係についての参照情報DB1が、始めは、ある使用者に対して適していなくても、当該参照情報DB1を、当該ある使用者に適合するように更新することができるので、新規の使用者に対しても、適したマッサージを実現することが可能となる。
また、皮膚弾性係数Khを考慮して参照情報DB1に基づいて施療子6の接触力を決定することで、使用者の身体的状態を考慮することができる。そして、脳波取得装置9によって使用者の脳波を取得することで、施療子6のマッサージ動作によるマッサージ効果や反応等の精神的状態を考慮して、より適切なマッサージを使用者に施すことが可能となる。
【0067】
なお、マッサージ動作途中で取得された使用者の脳波に基づいて当該マッサージ動作の適否を、適否推定部24が推定するが、脳波は非線形的な特性を有するため、さらに、一般的に脳波は使用者毎に出力特性が異なるため、推定結果に誤差が生じる場合もある。
しかし、本実施形態では、マッサージ動作の適否を推定するためにニューラルネットワークが用いられることで、非線形的な特性を有することによる問題点の発生を抑制することができる。
しかも、マッサージ動作の適否を推定するために用いられるニューラルネットワークは、脳波の出力特性についての相関に基づいて分類された複数のクラスC1,C2,C3それぞれに対応付けられたものである。そして、取得された使用者の脳波の出力特性が、どのクラスに属するかをクラス決定部24bが決定し、決定されたクラスC1に対応付けられているニューラルネットワークN1が用いられるため、使用者毎に脳波の出力特性が異なることによる問題点の発生を抑制することができる。
以上より、脳波からマッサージ動作の適否を推定する精度を高めることが可能となる。
そして、クラスC1,C2,C3は、安静状態での脳波の傾向が似通ったものを同一のクラスとするようにして分類されているので、ニューラルネットワークの出力として得られるマッサージ動作の適否の推定結果の精度を、より一層高くすることができる。
【0068】
前記実施形態では、クラス分類のためにK−means法によって用いられる脳波として、ある時間帯で取得されたα波、β波、これらの比(β/α)が正規化された値、平均値、分散、傾きの全てを用いてもよいが、少なくとも一つを用いればよく、特に「傾き」を用いるのが好ましい。これは、K−means法によって分類された同じクラスに属する任意の二つのデータの「傾き」に関する相関係数は、他のものと比べると特に高く、「傾き」に関する相関係数が0.5以上有することが確認されたためである。
したがって、α波、β波、これらの比(β/α)についての「傾き」の値が、最も脳波の傾向を捉えていると考えられるので、クラス分類の他に、マッサージ動作の適否を判定する際、ニューラルネットワークに当該「傾き」を入力するのが好ましい。なお、「傾き」は、前記のとおり所定時間毎におけるα波、β波、これらの比の各値(平均値)を最小二乗法で直線化した場合に得られる直線の傾きである。
【0069】
さらに説明すると、脳波の信号の変化の指標として、平均や分散を採用する場合、例えば快適であるという同じ条件であっても、使用者毎でその脳波の信号のレベルの大小は異なる。このため、同じクラス内に属する使用者の平均や分散についてのデータであっても、相関係数が低くなると考えられる。これに対して、傾き(及び正規化した値)は、脳波の信号のレベルの大小が使用者毎で異なっていても、同じ条件であれば、同様の変化を表すことから、同じクラス内に属する使用者のデータは相関係数が高くなると考えられる。
【0070】
また、本実施形態の、適否推定部24によるクラス分類及びニューラルネットワークを用いたマッサージ動作の適否の精度についての検証を行った結果を説明する。このために、分類された前記クラスC1,C2,C3の内の一つのクラス(C3)に属する複数の使用者に対して、予め快適と感じるマッサージ動作と、予め不快と感じるマッサージ動作とを行い、それぞれの場合において脳波取得装置9により脳波を取得した。
脳波をある時間として70秒取得し、この脳波の信号として、<1>α波の傾き、<2>β波の傾き、<3>比(β/α)の傾きそれぞれについて、10秒毎を1組とし、7組の入力データを得て、前記クラス(C3)に対応付けられたニューラルネットワークの入力層のノード数を21(3×7)とした。中間層のノード数は60であり、出力層のノード数は1である。
この結果、施療子6によって快適と感じるマッサージ動作を行った場合に取得された前記脳波を入力として、適否推定部24のニューラルネットワークを用いた出力が「1」となった確率、つまり、施療子6によって快適と感じるマッサージ動作を行って、適否推定部24が快適であると推定できた確率は80%を超え、また、施療子6によって不快と感じるマッサージ動作を行った場合に取得された前記脳波を入力として、適否推定部24のニューラルネットワークを用いた出力が「0」となった確率、つまり、施療子6によって不快であると感じるマッサージ動作を行って、適否推定部24が不快であると推定できた確率は80%を超えたことが判った。
このように、本実施形態によれば、高い精度でマッサージ動作の適否を推定することができる。
【0071】
前記実施形態では、記憶部22に記憶させる参照情報DBの数を3としたが、これに限定されるものではなく、また、K−means法によって分類したクラス数を3としたが、これに限定されるものではない。
なお、クラス分類に関して説明すると、前記のとおり、脳波に基づく値のうち、同じクラス内では「傾き」についての相関係数が高いことから、安静状態の脳波の時間的変化の傾向として、α波が上昇する場合、α波が下降する場合、及び、α波が変化しない場合というように、大きく3つの傾向があることが考えられる。一般的には、安静状態ではα波は上昇し、β波は降下すると言われているが、同じ状態であっても、使用者によっては脳波の傾向が異なることが判る。同じ安静状態や同じマッサージ状態であるにもかかわらず、脳波の出力の傾向が異なるようなデータの集合では、ニューラルネットワークによる推定精度が低下することがあるが、本実施形態では、脳波の傾向に相関が高いデータ毎にクラス分類し、クラス毎にニューラルネットワークが設定され、属するクラスが決定されると当該クラスに対応付けられたニューラルネットワークが採用されるので、前記のような推定精度の低下を抑制することができる。
【0072】
前記実施形態では、マッサージ機を椅子型である場合として、マッサージ動作のための出力(接触力)を求める場合を説明したが、椅子型以外にベッド型であってもよい。さらに、本発明は、前記脳波取得装置9及び制御装置18の前記各機能部を、マッサージ機能を有する主体(マッサージ機)とは独立したマッサージシステムに備えさせ、機能させることができる。この場合、マッサージ機能を有する主体が使用者の被施療部を押圧する押圧力を、マッサージシステムによって求める構成となる。
【0073】
すなわち、マッサージシステムを、図3を参考にして説明すると、使用者の脳波を取得する脳波取得装置9と、制御装置18とを備えていて、この制御装置18は、使用者の被施療部の皮膚弾性特性を推定する弾性特性推定部21と、被施療部の皮膚弾性特性と当該被施療部を押圧する押圧力との関係についての参照情報を記憶している記憶部22と、前記弾性特性推定部21によって推定された皮膚弾性特性と前記参照情報とに基づいて前記押圧力を求める調整部23と、この調整部によって求められた前記押圧力によりマッサージが行われた際に、前記脳波取得装置9から取得された脳波に基づいて当該マッサージの適否を推定する適否推定部24と、この適否推定部24による推定結果に基づいて前記参照情報(の押圧力)を更新する更新部25とを有している。
各部の構成、機能は、マッサージ機について説明したものと同様であり、その説明を省略する。
【0074】
〔4. 動作ノイズ除去について〕
前記実施形態のマッサージ機では、脳波取得装置9によって取得された脳波に基づいて、適否推定部24がマッサージ動作の適否を推定している。また、脳波取得装置9によって取得された使用者の脳波の出力特性が、複数のクラスC1,C2,C3の内のどのクラスに属するかを、適否推定部24(クラス決定部24b)が決定している。このように脳波を取得してマッサージ動作の適否の推定やクラスの決定がされているが、この取得された脳波に、使用者の動作に起因する動作ノイズが多く含まれていると、正確な推定及び正確な決定がされないおそれがある。
【0075】
図8(a)は、安静状態で眼を閉じた使用者から取得された脳波であり、図8(b)はこの脳波のパワースペクトルを示している。図8(c)は、安静状態ではあるが三回瞬きをした使用者から取得された脳波であり、図8(d)は、この脳波のパワースペクトルを示している。図8(c)に示しているように、使用者が脳波取得中に三回瞬きをすることにより、脳波には、三度の乱れ(二度のインパルス状の動作ノイズ)が含まれている。
また、瞬きをすることによって、脳波に+側(mV)の出力が大きく生じた後、−側(mV)の出力が生じることが知られている。そして、図8(d)に示しているように、瞬きによる動作ノイズが低周波域に含まれている。
このように、瞬きによる動作ノイズは、低周波(特に2〜9Hz)に現れ、その一部がα波領域に影響を与えることから、特にα波の信号(α波に基づく値)を用いてマッサージ動作の適否の推定や、クラスの決定を行うためには、このような動作ノイズを除去するのが好ましい。
【0076】
そこで、本発明のマッサージ機は、図3に示しているように、使用者の被施療部に接触させる施療子6を有し当該施療子6にマッサージ動作を行わせる前記機械本体ユニット5(図2参照)と、前記使用者の脳波を取得する測定器9aを有する前記脳波取得装置9と、この脳波取得装置9の測定器9aが取得した脳波に基づいて前記機械本体ユニット5の動作を制御する前記制御装置18とを備えており、脳波取得装置9又は制御装置18は、前記測定器9aが取得した脳波から、使用者の動作(眼球動作)に起因する動作ノイズを除去する動作ノイズ除去部26を有している。
【0077】
図9は動作ノイズ除去部26の構成を説明するブロック図である。
動作ノイズ除去部26は、前記脳波取得装置9の測定器9aによって取得された脳波から、被施療者の早い眼球動作(瞬き)によって生じる動作ノイズの存在を判定する判定部42と、前記脳波から、その動作ノイズ成分を除去する除去処理部43とを有している。
【0078】
なお、使用者がマッサージを受ける前の安静状態で脳波取得中の使用者が、又は、施療子6によるマッサージ動作中で脳波取得中の使用者が、ゆっくりと眼球動作を行うと、取得できる脳波に緩やかな変動が発生する。そこで、動作ノイズ除去部26は、測定器9aが取得した脳波から、時間領域における緩やかな脳波の変動を除去するトレンド除去部41を有していてもよい。トレンド除去部41は、脳波取得装置9が取得したオリジナルの脳波を移動平均処理すると共に、この移動平均処理した脳波を、脳波取得装置9が取得したオリジナルの脳波から差し引く処理を行う。このトレンド除去部41により、脳波のゆるやかな変動を除去することができ、この場合、変動を除去した脳波の信号に基づいて前記判定部42によって動作ノイズの存在の判定が行われ、除去処理部43によってその動作ノイズの除去が行われる。
【0079】
判定部42は、脳波取得装置9の測定器9aによって所得された脳波又はトレンド除去部41によって変動が除去された脳波(以下、これらを処理対象脳波という)に基づく時系列信号(波形)と、使用者の早い眼球動作(瞬き)によって生じる動作ノイズの波形雛形とを比較することで、その動作ノイズの存在を判定する。
図10は、判定部42の機能を説明する説明図である。(一般的な)使用者の瞬きによって生じる動作ノイズの波形雛形を、図10(a)に示す波形Fとすることができる。この雛型波形Fは、被施療者が瞬きを行うことにより脳波取得装置9が予め取得することができ、この雛型波形Fを判定部42は記憶している。
【0080】
判定部42は、この雛型波形Fをテンプレートとして、前記処理対象脳波との相関係数を求めることにより、当該処理対象脳波から動作ノイズの存在を判定する。なお、前記相関係数は、一般的に知られているように、二つの確率変数の間の類似性の度合いを示す統計学的指標であり、例えば−1から+1までの実数値を取り、この値が+1に近ければ正の高い相関があり、−1に近ければ負の高い相関があると言える。逆に、値がゼロに近いと相関が弱く、類似性が低いと言える。
【0081】
そこで、判定部42は、この相関係数を用いて雛型波形Fと処理対象脳波の波形との類似性を求め、この結果に基づいて、瞬きによる動作ノイズの存在を判定する。具体的な判定部42による処理は、図10(b)に示している処理対象脳波の時系列データを固定し、このデータに対して雛型波形Fを時間的に進めながら両者の相関係数を求める。図10(c)はこの処理によって得られた相関係数の波形を示している。図10(c)と図10(b)とを比較すると、処理対象脳波に存在している瞬き動作付近で、高い相関係数が得られている。そこで、判定部42は、相関係数が、所定の閾値P以上(及び/又は所定の閾値Q以下)、例えば、閾値P=+0.7以上(閾値Q=−0.7以下)であると判定した場合、高い相関であるとし、この場合を瞬きによる動作ノイズが発生している領域であると判定する。
このように、被施療者が瞬きをすると、脳波が特定の波形となることから、この判定部42によれば、処理対象脳波の波形と、予め設定された波形雛型Fとを比較することで、瞬きによる動作ノイズの存在を判定することができる。
【0082】
また、判定部42は、前記処理対象脳波の出力値と、予め設定された出力値についての閾値とを比較することで、瞬きによる動作ノイズの存在を判定してもよく、又は、この出力値についての閾値を用いた判定を行うと共に、前記相関係数を用いた判定を行ってもよい。
【0083】
また、判定部42は、動作ノイズが存在している領域(時間領域)の決定を行うこともできる。例えば、相関係数を用いた判定を行う場合、当該相関係数が、相関係数に関する前記閾値P,Qを超えた時点を挟んで、前の所定領域(時間領域)と後の所定領域(時間領域)とを、動作ノイズが存在している領域(時間領域)として決定することができる。例えば、前記前の所定領域(時間領域)を1秒とし、後の所定領域(時間領域)を1秒とすることができる。
しかし、インパルス状の動作ノイズの頂点と雛型波形Fの頂点とが重なった時点で、相関係数が最も大きくなることから、このインパルス状となる動作ノイズの頂点が発生する時点と、前記相関係数が前記閾値P,Qを超える時点とは僅かにずれる(例えば0.5秒ずれる)。このため、前記前の所定領域(時間領域)と後の所定領域(時間領域)は、ずれ時間が考慮されるのが良い。つまり、前の所定領域(時間領域)を0.5秒とし、後の所定領域(時間領域)を1.5秒とするのがよい。
【0084】
以上のようにして、判定部42が、処理対象脳波の中から動作ノイズの存在を判定すると、図9において、除去処理部43は、当該処理対象脳波の内の動作ノイズを含む領域を部分的に独立成分分析し、当該領域から動作ノイズの成分を除去する。つまり、脳波の信号を残したまま動作ノイズのみを除去する。
除去処理部43が独立成分分析を行うためには、複数組の電極10からの脳波(複数チャンネルの脳波)が必要となる。そこで、本実施形態では、瞬きによる眼の上下動作成分を検出するために、眼の上下に取り付ける第一の組みの電極10と、額と耳に取り付ける第二の組みの電極10とが設けられている。なお、眼球の左右動作成分も検出するために、眼の左右に取り付ける第三の組みの電極10が設けられていてもよい。
【0085】
前記独立成分分析は、後にも説明するが、元の信号が複数混合された信号から、元の信号それぞれを復元させる計算手段であり、除去処理部43は、この独立成分分析のためのプログラムが設定され当該プログラムを実行する機能を有している。
この独立成分分析を行う対象は、所定時間(例えば図8(c)では20秒間)について得られた処理対象脳波の内の、前記判定部42によって決定された、動作ノイズが存在している領域(時間領域)のみである。なお、図8(c)では、領域K1,K2,K3の時間領域が、判定部42によって決定されたものであり、領域K1と領域K2と領域K3との三つの領域のみが、独立成分分析の対象となる。
【0086】
これにより、領域K1,K2,K3それぞれについて、信号に動作ノイズが含まれていない領域k1,k2,k3を得ることができる。そして、除去処理部43は、動作ノイズが含まれていた領域K1,K2,K3を、動作ノイズが含まれていない領域k1,k2,k3に差し替える処理を行う。つまり、除去処理部43は、瞬きによる動作ノイズが含まれている領域を、当該ノイズ成分が除去されたものに差し替える処理を行う。
【0087】
図11(a)は、図8(c)の脳波信号について、差し替える処理を行い動作ノイズが除去された脳波信号を示しており、図11(b)はそのパワースペクトルを示している。図11(a)に示しているように、インパルス状の動作ノイズが除去されていることが判る。また、図11(b)のパワースペクトルは、図8(b)の安静閉眼時のパワースペクトルと似通っており、動作ノイズが除去されていることが判る。なお、20Hz及び40Hz付近のパワースペクトルは、マッサージ機(機械本体ユニット5)による電磁ノイズである。
【0088】
そして、図9において、除去処理部43によって差し替える処理が行われた時間領域の脳波信号は、脳波取得装置9の処理部9bが有するFFT演算部44によって、周波数領域に変換される。そして、処理部9bが有する帯域分離演算部45は、周波数領域に変換された信号からα波とβ波とを出力することができる。
【0089】
以上のような動作ノイズ除去部26によれば、処理対象脳波の内の動作ノイズを含む領域K1,K2,K3を部分的に独立成分分析し、当該動作ノイズの成分を除去した信号を取得することができるので、脳波の内の、動作ノイズを含まない領域(領域K1,K2,K3以外の領域)には、独立成分分析による影響を与えず、各種処理のために利用することができる。
そして、動作ノイズを含む領域K1,K2,K3については、当該動作ノイズの成分が除去された信号となるので、当該領域における脳波も各種処理のために用いることができる。つまり、動作ノイズがたとえ多くなったとしても、所定時間(図8では20秒間)取得された全脳波の信号に基づいて、適否推定部24がマッサージ動作の適否を推定したり、この脳波の出力特性が、複数のクラスC1,C2,C3の内のどのクラスに属するかを適否推定部24(クラス決定部24b)が決定したりできる。
【0090】
なお、仮に、全ての処理対象脳波(20秒間の脳波)を対象として独立成分分析すると、動作ノイズが含まれていない領域の信号にも、その影響を与えてしまう。さらに、独立成分分析にはある程度の処理時間を要することから、全ての処理対象脳波(20秒間の脳波)を独立成分分析すると、動作ノイズの除去処理に多くの時間がかかる。しかし、本実施形態では、部分的に独立成分分析を行えばよいので、動作ノイズの除去処理の時間の短縮が可能となる。
また、判定部42によって動作ノイズが含まれている領域を求め、当該領域を脳波から除去し(当該領域を空白とし)残りの領域により各種の処理を行ってもよいが、この場合、脳波取得時間帯に動作ノイズ(瞬き)が増えると、各種の処理を行うための信号が減少してしまい、この結果、脳波の取得時間を長くする必要がある。しかし、本発明の前記実施形態によれば、動作ノイズが増えても、処理するための信号の減少を防ぐことができ、脳波の取得時間を増やす必要はない。
【0091】
独立成分分析について説明する。図12は独立成分分析の概念図である。元の信号を、s1(t)・・・sN(t)とし、観測された信号を、x1(t)・・・xM(t)、混合過程の伝達特性をAとすると、混合過程は式(13)となる。
【数13】
したがって、伝達特性Aを求めることにより、元の信号を復元することが可能となる。なお、本実施形態では、元の信号は、動作ノイズの信号と、動作ノイズを含まない脳波の信号とであり、観測された信号は、処理対象脳波の信号である。
【0092】
元の信号を復元するために、非ガウス的であり、互いに独立でなければならないという条件が設定されている。そして、元の信号を復元するために、不動点法を用いている。
統計的独立とするために白色化を行う。白色化は以下の手順で行われる。信号Xが与えられた際、共分散行列をE(XXT)とし、式(14)のように特異値分解を行う。
【数14】
【0093】
ここで、eは直交行列、Dは対角行列である。白色化するための変数をMとすると、Mは式(15)となる。
【数15】
Z=MXとして共分散を求めると式(16)となる。このように、共分散が単位行列となるため信号Xは変数Mによって白色化される。
【数16】
【0094】
次に、白色化された信号を、式(17)を用いて不動点法を行う。Wiを設定し、初期値Wi(0)をランダムに決定し、式(18)となるように標準化を行い、更新式(19)を行う。
【数17】
【数18】
【数19】
【0095】
式(19)の実行後に、i>1であった場合、式(20)によって射影を行う。
【数20】
【0096】
ここで、Biは、最終的に求められるべき直交行列である。更新式(19)の実行と射影後に、式(21)が1に十分近ければ操作を終了して次の列へ、それ以外であればk=k+1として操作を繰り返す。最終的に求められたBを用いると、式(22)となり、元の信号を求めることができる。
【数21】
【数22】
【0097】
前記実施形態では、動作ノイズ除去部26は、脳波取得装置9が取得した脳波(処理対象脳波)から、使用者の動作に起因する動作ノイズを除去する場合を説明したが、動作ノイズ除去部26は、マッサージ機(機械本体ユニット5)が動作して使用者が揺さぶられ、電極10に繋がっているリード線が振れることによる動作ノイズを除去することもできる。
【0098】
〔5 適否推定部のさらなる機能〕
前記〔2.4 マッサージ動作の適否の推定〕で説明したように、前記接触力調整部23によって接触力(接触力目標値)が求められると、当該接触力(接触力目標値)により実際に施療子6によってマッサージ動作が行われ、前記適否推定部24は、このマッサージ動作が行われた際に脳波取得装置9から取得された脳波に基づいて、当該マッサージ動作の適否を推定することができる。この適否推定部24による推定処理は、脳波取得装置9によって取得された脳波(前記動作ノイズ除去部26によって動作ノイズが除去された脳波)のα波及びβ波に基づいて、マッサージ動作の適否の推定として、快適又は不快の判定を行う。つまり、前記実施形態では、適否推定部24は、分類されたクラス毎に設定されているニューラルネットワークを用いてマッサージ動作の適否の推定を行った。
ここでは、適否推定部24は、異なる手段によりマッサージ動作の適否を推定することの説明を行う。図13は、マッサージ動作の適否を推定するフロー図である。
【0099】
〔5.1 マッサージ動作の適否を推定(その2)〕
前記のとおり、脳波取得装置9により使用者の脳波として快適時に発生するα波と不快時に発生するβ波とを取得することができる。そこで、代表的な使用者に対して快適となるマッサージ動作を施療子6によって行い、当該使用者から脳波に基づく値(α波及びβ波)を予め所定時間について取得する。所定時間は、例えば10秒×n(n:1,2,3・・・)とすることができる。
そして、適否推定部24は、取得した脳波に基づく値に関して、ある時間(例えば10秒)毎に移動平均処理を行い、この移動平均処理を行った脳波に基づく値(α波及びβ波)それぞれに関して、ある時間(例えば10秒)を1区間として区間毎の平均値(又は標準偏差)を求める。なお、以下において、具体的に主体を記載しない処理については適否推定部24が行う処理である。
【0100】
この処理を、複数の代表的な使用者についても行い、全使用者についての区間毎の平均値(又は標準偏差)をさらに求める。これにより、各区間における平均的なデータが得られ、この平均的なデータを閾値として、適否推定部24は記憶する。このようにして得られた、各区間の平均的なデータを図14に示しており、(a)はα波に関する値であり、(b)はβ波に関する値である。
そして、快適時に発生するα波に関しての各区間の平均的なデータ(図14(a))が第一閾値として設定され、不快時に発生するβ波に関しての各区間の平均的なデータ(図14(b))が第二閾値として設定される(図13のステップS11)。これら第一閾値及び第二閾値は、一般的な使用者の平均的な脳波であるといえる。
【0101】
そして、施療子6により実際にマッサージ動作が開始されると(ステップS12)、脳波取得装置9は、使用者から脳波に基づく値としてα波及びβ波を取得する(ステップS13)。適否推定部24は、マッサージ動作中に取得されたα波及びβ波それぞれに関して、第一及び第二閾値を求めるために採用した前記1区間と同じ時間(例えば10秒)を1区間と設定し、区間毎の平均値を求める(ステップS14)。さらに、マッサージ動作中に取得されたα波及びβ波それぞれに関しての区間毎の平均値と、同じ区間での第一及び第二の閾値との差(差分値)を算出して、その算出結果の累積(累積差分値)を求める(ステップS14)。
【0102】
適否推定部24は、この累積差分値の傾向、つまり、累積差分値の時間的変化を判定し、その判定結果に基づいて快適又は不快の推定を行う(ステップS15)。つまり、α波及びβ波のそれぞれの累積差分値が、上昇しているか又は下降しているか又は停滞しているかを判定する。そして、α波に関して累積差分値が上昇又は停滞であれば快適と推定し(ステップS16−1のYes)、下降であれば不快と推定する(ステップS16−1のNo)。また、β波に関しては累積差分値が下降又は停滞であれば快適と推定し(ステップS16−2のYes)、上昇であれば不快と推定する(ステップS16−2のNo)。なお、累積差分値の上昇又は下降などは、各区間の累積差分値を直線近似して当該直線の傾きを求めることで判別することができる。
【0103】
図15(a)は、α波及びβ波それぞれに関して、横軸を時間、縦軸を累積差分値として表したグラフであり、ある使用者に対して施療子6によりマッサージ動作を行って得た脳波によるものである。この図15(a)によれば、α波の累積差分値が、始めから最後まで全体的に停滞(横ばい)となっており、β波の累積差分値は、下降傾向にある。このため、適否推定部24は、始めから終わりまで快適であると判定することができる。
図15(b)は、他の使用者によるグラフである。α波の累積差分値は、始め降下しているが、途中より(100秒後)上昇傾向にある。β波の累積差分値は、終始、上昇傾向にある。このため、適否推定部24は、少なくとも始めから途中までは、不快であると判定することができる。
【0104】
以上のように、本実施形態の適否推定部24は、快適である場合に得られる脳波に関する閾値と、脳波取得装置9から所定時間毎(区間毎)に取得された脳波との差分値、及び、当該差分値を累積した累積差分値を求め、当該累積差分値の時間経過に伴う増減の傾向を判定することにより、施療子6によるマッサージ動作の適否を推定している。
なお、脳波に基づいて快適又は不快の推定を行う場合において、短時間(例えば10秒以内)毎の脳波により快適又は不快の推定を行えば、その時点でのマッサージ動作の適否を推定することができるが、本実施形態では、快適又は不快の継続性(持続性)の観点からマッサージ動作の適否を推定することができる。つまり、快適なマッサージがされていても、慣れてしまい快適の度合いが減少し、やがて不快へと変化するような場合に、本実施形態の適否推定部24によれば、マッサージ動作の適否を推定することができる。
【0105】
以上、本発明のマッサージ機は、図示する形態に限らず本発明の範囲内において他の形態のものであっても良い。例えば、図1において、脚載せ部3が省略された椅子型マッサージ機であってもよい。また、機械本体ユニット5も図示した以外の構成であってもよい。
また、前記実施形態では、機械本体ユニット5の一部として施療子6を被施療部に接触させ、皮膚弾性係数を推定する場合を説明したが、マッサージ機は施療子6以外に被施療部に接触する突出子を有し、この突出子の変位情報に基づいて皮膚弾性係数を推定してもよい。
また、被施療部に接触させるマッサージ具(施療子6)を有し当該マッサージ具(施療子6)にマッサージ動作を行わせるマッサージ機構部を、本実施形態では、背凭れ部2内に設けた機械本体ユニット5として説明したが、これ以外であってもよく、マッサージ機構部は、マッサージ機の内の使用者の身体を支持する部分、例えば、背凭れ部2全体をマッサージ機構部としてもよい。
【符号の説明】
【0106】
5:機械本体ユニット(マッサージ機構部)、 6:施療子(マッサージ具)、 9:脳波取得装置(脳波取得部)、 18:制御装置(制御部)、 21:弾性特性推定部、 22:記憶部、 23:接触力調整部(調整部)、 24:適否推定部、 24a:設定部、 24b:クラス決定部、 24c:推定本体部、 25:更新部、 26:動作ノイズ除去部、 F:雛型波形
【特許請求の範囲】
【請求項1】
使用者の被施療部に接触させるマッサージ具を有し当該マッサージ具にマッサージ動作を行わせるマッサージ機構部と、前記マッサージ機構部の動作を制御する制御部と、前記使用者の脳波を取得する脳波取得部と、を備え、
前記制御部は、
前記マッサージ機構部の一部が前記被施療部に接触している際の情報に基づいて当該被施療部の弾性特性を推定する弾性特性推定部と、
被施療部の弾性特性と前記マッサージ具を当該被施療部に接触させる接触力との関係についての参照情報を記憶している記憶部と、
前記弾性特性推定部によって推定された弾性特性と前記参照情報とに基づいて前記接触力を求める調整部と、
前記調整部によって求められた前記接触力により前記マッサージ動作が行われた際に、前記脳波取得部から取得された脳波に基づいて当該マッサージ動作の適否を推定する適否推定部と、
前記適否推定部による推定結果に基づいて前記参照情報を更新する更新部と、
を有していることを特徴とするマッサージ機。
【請求項2】
前記適否推定部は、
脳波の出力特性についての相関に基づいて分類された複数のクラスそれぞれに対応付けられた入出力数学モデルが設定されている設定部と、
前記脳波取得部によって取得された使用者の脳波の出力特性が、前記複数のクラスの内のどのクラスに属するかを決定するクラス決定部と、
前記脳波取得部によって取得された使用者の脳波を入力として、前記クラス決定部によって決定されたクラスに対応付けられている前記入出力数学モデルを用いて出力した出力情報により前記マッサージ動作の適否を推定する推定本体部と、
を有している請求項1に記載のマッサージ機。
【請求項3】
前記入出力数学モデルは、ニューラルネットワークである請求項2に記載のマッサージ機。
【請求項4】
前記記憶部は、使用者の代表的な体格毎の参照情報を複数種類について記憶し、
前記調整部は、実際に使用する使用者の体格に応じて前記複数種類の参照情報から選択された参照情報と、前記弾性特性推定部によって推定された弾性特性と、に基づいて前記接触力を求める請求項1〜3のいずれか一項に記載のマッサージ機。
【請求項5】
前記脳波取得部が取得した脳波から、使用者の動作に起因する動作ノイズを除去する動作ノイズ除去部を有し、
前記動作ノイズ除去部は、
前記脳波取得部が取得した脳波の中から動作ノイズの存在を判定し、当該脳波の内の動作ノイズを含む領域を部分的に独立成分分析し、当該動作ノイズの成分を除去する請求項1〜4のいずれか一項に記載のマッサージ機。
【請求項6】
前記動作ノイズ除去部は、
前記脳波取得部が取得した脳波に基づく信号と、前記動作ノイズについての予め設定された波形雛型とを比較することで、動作ノイズの存在を判定する請求項5に記載のマッサージ機。
【請求項7】
前記適否推定部は、快適である場合に得られる脳波に関する閾値と、前記脳波取得部から所定時間毎に取得された脳波との差分値、及び、当該差分値を累積した累積差分値を求め、当該累積差分値の増減に基づいて、前記マッサージ動作の適否を推定する請求項1〜6のいずれか一項に記載のマッサージ機。
【請求項8】
使用者の脳波を取得する脳波取得部と、
使用者の被施療部の弾性特性を推定する弾性特性推定部と、
被施療部の弾性特性と当該被施療部を押圧する押圧力との関係についての参照情報を記憶している記憶部と、
前記弾性特性推定部によって推定された弾性特性と前記参照情報とに基づいて前記押圧力を求める調整部と、
前記調整部によって求められた前記押圧力によりマッサージが行われた際に、前記脳波取得部から取得された脳波に基づいて当該マッサージの適否を推定する適否推定部と、
前記適否推定部による推定結果に基づいて前記参照情報を更新する更新部と、
を有していることを特徴とするマッサージシステム。
【請求項1】
使用者の被施療部に接触させるマッサージ具を有し当該マッサージ具にマッサージ動作を行わせるマッサージ機構部と、前記マッサージ機構部の動作を制御する制御部と、前記使用者の脳波を取得する脳波取得部と、を備え、
前記制御部は、
前記マッサージ機構部の一部が前記被施療部に接触している際の情報に基づいて当該被施療部の弾性特性を推定する弾性特性推定部と、
被施療部の弾性特性と前記マッサージ具を当該被施療部に接触させる接触力との関係についての参照情報を記憶している記憶部と、
前記弾性特性推定部によって推定された弾性特性と前記参照情報とに基づいて前記接触力を求める調整部と、
前記調整部によって求められた前記接触力により前記マッサージ動作が行われた際に、前記脳波取得部から取得された脳波に基づいて当該マッサージ動作の適否を推定する適否推定部と、
前記適否推定部による推定結果に基づいて前記参照情報を更新する更新部と、
を有していることを特徴とするマッサージ機。
【請求項2】
前記適否推定部は、
脳波の出力特性についての相関に基づいて分類された複数のクラスそれぞれに対応付けられた入出力数学モデルが設定されている設定部と、
前記脳波取得部によって取得された使用者の脳波の出力特性が、前記複数のクラスの内のどのクラスに属するかを決定するクラス決定部と、
前記脳波取得部によって取得された使用者の脳波を入力として、前記クラス決定部によって決定されたクラスに対応付けられている前記入出力数学モデルを用いて出力した出力情報により前記マッサージ動作の適否を推定する推定本体部と、
を有している請求項1に記載のマッサージ機。
【請求項3】
前記入出力数学モデルは、ニューラルネットワークである請求項2に記載のマッサージ機。
【請求項4】
前記記憶部は、使用者の代表的な体格毎の参照情報を複数種類について記憶し、
前記調整部は、実際に使用する使用者の体格に応じて前記複数種類の参照情報から選択された参照情報と、前記弾性特性推定部によって推定された弾性特性と、に基づいて前記接触力を求める請求項1〜3のいずれか一項に記載のマッサージ機。
【請求項5】
前記脳波取得部が取得した脳波から、使用者の動作に起因する動作ノイズを除去する動作ノイズ除去部を有し、
前記動作ノイズ除去部は、
前記脳波取得部が取得した脳波の中から動作ノイズの存在を判定し、当該脳波の内の動作ノイズを含む領域を部分的に独立成分分析し、当該動作ノイズの成分を除去する請求項1〜4のいずれか一項に記載のマッサージ機。
【請求項6】
前記動作ノイズ除去部は、
前記脳波取得部が取得した脳波に基づく信号と、前記動作ノイズについての予め設定された波形雛型とを比較することで、動作ノイズの存在を判定する請求項5に記載のマッサージ機。
【請求項7】
前記適否推定部は、快適である場合に得られる脳波に関する閾値と、前記脳波取得部から所定時間毎に取得された脳波との差分値、及び、当該差分値を累積した累積差分値を求め、当該累積差分値の増減に基づいて、前記マッサージ動作の適否を推定する請求項1〜6のいずれか一項に記載のマッサージ機。
【請求項8】
使用者の脳波を取得する脳波取得部と、
使用者の被施療部の弾性特性を推定する弾性特性推定部と、
被施療部の弾性特性と当該被施療部を押圧する押圧力との関係についての参照情報を記憶している記憶部と、
前記弾性特性推定部によって推定された弾性特性と前記参照情報とに基づいて前記押圧力を求める調整部と、
前記調整部によって求められた前記押圧力によりマッサージが行われた際に、前記脳波取得部から取得された脳波に基づいて当該マッサージの適否を推定する適否推定部と、
前記適否推定部による推定結果に基づいて前記参照情報を更新する更新部と、
を有していることを特徴とするマッサージシステム。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−104268(P2011−104268A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−265191(P2009−265191)
【出願日】平成21年11月20日(2009.11.20)
【出願人】(504150461)国立大学法人鳥取大学 (271)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月20日(2009.11.20)
【出願人】(504150461)国立大学法人鳥取大学 (271)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]