
マッサージ機及びマッサージ方法
【課題】使用者の体型を検出することができるマッサージ機を提供する。
【解決手段】使用者の身体に施療子7が当接することによってモータ17aの負荷が変化し当該負荷に応じて施療子7の動作速度が変化するマッサージ機である。施療子7の動作速度に関する速度情報を取得する速度情報取得部21と、速度情報を取得した位置に対応する施療子7の昇降位置を取得する位置取得部22と、施療子7の軌道上での各位置に対応した速度情報に基づいて使用者の身体の凹凸形状を求める体型検出部23とを備えている。
【解決手段】使用者の身体に施療子7が当接することによってモータ17aの負荷が変化し当該負荷に応じて施療子7の動作速度が変化するマッサージ機である。施療子7の動作速度に関する速度情報を取得する速度情報取得部21と、速度情報を取得した位置に対応する施療子7の昇降位置を取得する位置取得部22と、施療子7の軌道上での各位置に対応した速度情報に基づいて使用者の身体の凹凸形状を求める体型検出部23とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マッサージ機及びマッサージ方法に関する。
【背景技術】
【0002】
椅子型マッサージ機が、使用者の身長の高低に応じて適切なマッサージを行なうために、当該椅子型マッサージ機が使用者毎の肩の位置を検出し記憶する技術が各種提案されている(例えば、特許文献1参照)。特許文献1に記載の椅子型マッサージ機では、背凭れ部内において施療子を上から下へ移動させ、施療子が使用者の肩に当った時の位置を肩位置として記憶するように構成されている。
【0003】
【特許文献1】特開2003−52780号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、前記のような従来技術では、肩の位置を検出することはできるが、例えば肩から腰までの凹凸形状、つまり、使用者の上半身背面側の体型までを検出することはできない。このような使用者の体型を検出することができれば、その体型に基づいて施療子の突出量を調整することができ、さらに適切なマッサージが行なわれる。
そこで、本発明は、使用者の体型を検出することができるマッサージ機及びこのマッサージ機によって行なわれるマッサージ方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するための本発明のマッサージ機は、施療子、モータ及びこのモータの動力を前記施療子に伝達し当該施療子を動作させる動力伝達部を有しているマッサージユニットと、前記施療子が所定の軌道に沿って移動するように前記マッサージユニットを使用者の身体に沿って移動させる移動機構とを備え、使用者の身体に前記施療子が当接することによって前記モータの負荷が変化し当該負荷に応じて当該施療子の動作速度が変化するマッサージ機であって、前記施療子の前記動作速度に関する速度情報を取得する速度情報取得部と、前記速度情報を取得した位置に対応する前記施療子の前記所定の軌道における移動位置を取得する位置取得部と、前記施療子の前記移動位置に対応した前記速度情報に基づいて使用者の身体の凹凸形状を求める体型検出部とを備えたものである。
【0006】
本発明のマッサージ機が備えているマッサージユニットによれば、使用者の身体に施療子が当接することによってモータの負荷が変化し、その負荷に応じて施療子の動作速度が変化する。つまり、前記移動機構によってマッサージユニットを使用者の身体に沿って移動させ、施療子を所定の軌道に沿って移動させると、その身体の内の前記軌道に比較的近い部分(膨らんでいる部分)では、施療子に作用する荷重は大きくなり、モータの負荷が大きくなって(高負荷状態)、モータの回転速度が下記の低負荷状態よりも遅くなることから施療子の動作速度も遅くなる。一方、身体の内の前記軌道から比較的離れている部分(凹んでいる部分)では、施療子に作用する荷重は小さくなり、モータの負荷が小さくなって(低負荷状態)、モータの回転速度が前記高負荷状態よりも速くなることから施療子の動作速度も速くなる。
そこで、移動機構によって施療子を前記軌道に沿って移動させる際に、速度情報取得部が、施療子の動作速度に関する速度情報を取得し、位置取得部が、前記速度情報を取得した位置に対応する施療子の前記軌道における移動位置を取得する。そして、体型検出部が、施療子の前記移動位置における速度情報に基づいて、使用者の身体の凹凸形状を求めることにより、使用者の体型(凹凸)を検出することができる。
【0007】
また、前記マッサージ機において、前記速度情報取得部は、前記施療子による所定のマッサージ動作に要する時間幅に基づいて、前記速度情報を取得するのが好ましい。
これによれば、施療子に作用する荷重が大きくなるように変化し、施療子による所定のマッサージ動作の速度が遅くなるように変化すると、速度情報取得部は大きい値の時間幅を取得することができる。一方、施療子に作用する荷重が小さくなるように変化し、施療子による所定のマッサージ動作の速度が速くなるように変化すると、速度情報取得部は小さい値の時間幅を取得することができる。
【0008】
また、前記所定のマッサージ動作は、使用者側を前方とし前記マッサージユニット側を後方とした前後方向の成分を有する叩きマッサージ動作であり、前記速度情報取得部は、前記施療子による所定回数の前記叩きマッサージ動作に要する時間幅に基づいて、前記速度情報を取得するのが好ましい。
施療子による叩きマッサージ動作は前後方向の成分を有する動作であり、また、使用者から施療子が受ける荷重の方向も、前後方向の後方である。このため、使用者から施療子に作用する荷重の変化は、施療子の叩きマッサージ動作の速度変化に影響を与え易い。したがって、使用者から施療子に作用する荷重の変化に基づく叩きマッサージ動作の速度の変化を検出し易くなり、体型検出の精度を高めることができる。
【0009】
また、前記マッサージ機は、前記施療子を前記使用者の身体に対して押し引きする方向へ移動させる押し引き動作部と、前記体型検出部によって検出した体型に基づいて前記押し引き動作部により前記施療子の押し引き量を変化させながら前記移動機構により前記マッサージユニットを移動させて、当該施療子にマッサージ動作をさせる制御を行なうマッサージ動作制御部とを更に備えているのが好ましい。
これによれば、使用者の体型に沿って施療子を押し引きしながら当該施療子にマッサージ動作を実行させることができる。
【0010】
また、前記マッサージ機は、前記施療子に所定のマッサージ動作をさせるステップを有するマッサージコースを記憶している記憶部を更に備え、前記ステップの実行中に前記速度情報取得部が取得した前記施療子の前記速度情報と、前記位置取得部が求めた前記施療子の前記位置とに基づいて、前記体型検出部が使用者の体型を検出するのが好ましい。
これによれば、施療子が所定のマッサージ動作を行なっているステップの実行中に、体型検出を行なうことができる。
【0011】
また、本発明は、モータの動力が施療子に伝達し当該施療子が動作すると共に、前記施療子が所定の軌道上を移動し、かつ、使用者の身体に前記施療子が当接することによって前記モータの負荷が変化し当該負荷に応じて当該施療子の動作速度が変化するマッサージ機が実行するマッサージ方法であって、前記施療子の前記動作速度に関する速度情報を取得すると共に、前記速度情報を取得した位置に対応する前記施療子の前記所定の軌道における移動位置を求め、前記施療子の前記移動位置に対応した前記速度情報に基づいて使用者の身体の凹凸形状を求めて体型を検出し、検出した体型に基づいて前記施療子の身体に対する押し引き量を変化させながら当該施療子を使用者の身体に沿って移動させて、当該施療子をマッサージ動作させることによって行なわれる。
このマッサージ方法によれば、使用者の体型を検出することができ、この体型に応じて施療子を押し引きしながらマッサージ動作が行なわれるため、身体と施療子との位置関係が調整されて適切なマッサージが行なわれる。
【発明の効果】
【0012】
本発明によれば、施療子の各位置における速度情報に基づいて、使用者の身体の凹凸形状を求めることにより、使用者の体型を検出することができる。使用者の体型を検出することにより、その体型に基づいて身体に対する施療子の前後位置を調整することができ、体型に応じた適切なマッサージを行なうことが可能となる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を図面に基づいて説明する。
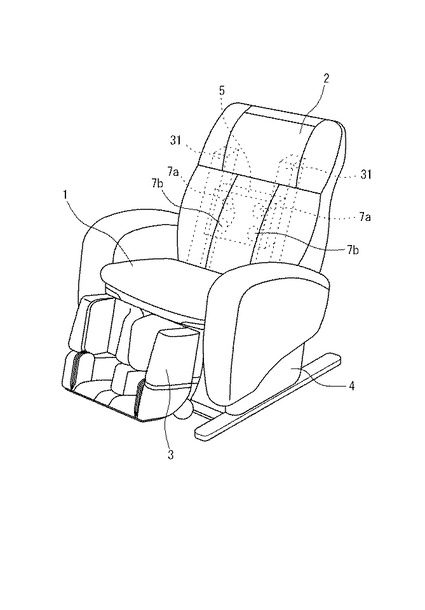
図1は本発明のマッサージ機の実施の一形態を示す斜視図である。このマッサージ機は、脚体4により支持された座部1と、この座部1の後側に設けられた背凭れ部2と、座部1の前側に設けられた脚載せ部3とを備えており、椅子型である。背凭れ部2はリクライニング可能であり、脚載せ部3は、座部1側を中心として上下回動可能である。なお、以下において、背凭れ部4の幅方向を「左右方向」、高さ方向を「上下方向」、奥行き方向(厚さ方向)を「前後方向」という。
【0014】
背凭れ部2内には、上下施療子7a,7b(以下、まとめて施療子7ともいう)を左右に有しているマッサージユニット5が設けられている。マッサージユニット5は、背凭れ部2の内部に左右一対に設けられたガイドレール31にガイドされている。
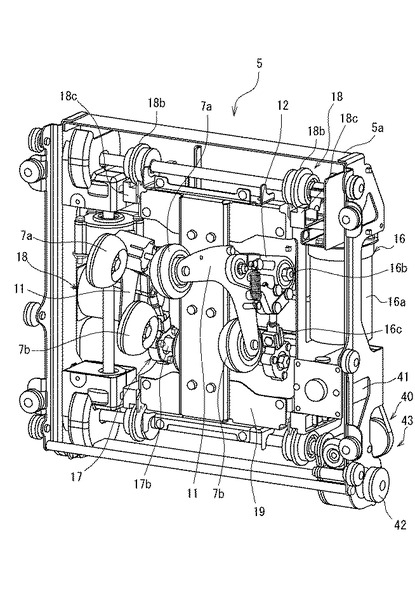
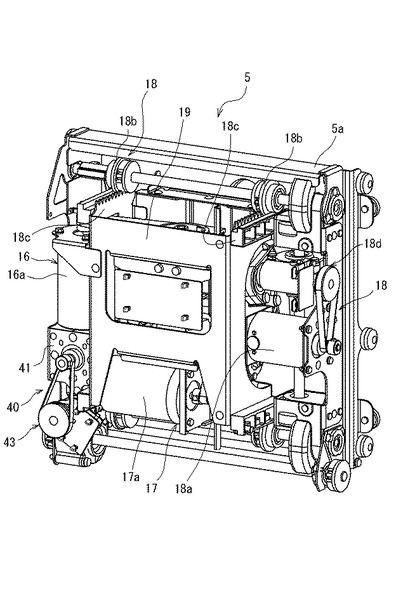
図2はマッサージユニット5を前方から見た斜視図であり、図3は後方から見た斜視図である。マッサージユニット5は、昇降機構(移動機構)40の駆動によってガイドレール31に沿って上下移動する。
【0015】
この実施の形態では、昇降機構40はマッサージユニット5に搭載されている。昇降機構40は、昇降用モータ41と、ピニオン42と、昇降用モータ41の動力をピニオン42に伝達しピニオン42を回転させる動力伝達部43とを有している。ピニオン42は、図1に示したガイドレール31に沿って設けられたラック(図示せず)と噛合する。これにより、昇降用モータ41が正逆回転すると、マッサージユニット5はガイドレール31に沿って上下移動する。ガイドレール31は上下方向直線状に伸びており、マッサージユニット5は上下方向に直線移動することができる。
【0016】
図2において、施療子7は、マッサージユニット5の左右両側のそれぞれに上下一対設けられている。上下の施療子7a,7bは支持アーム11の両端部に取り付けられている。支持アーム11は駆動アーム12に揺動可能として取り付けられている。また、駆動アーム12と後述する叩き軸17bとは、自在継手部を有する連結部材16cによって連結されている。
また、図2と図3において、マッサージユニット5は施療子7によって揉み、叩き、指圧のマッサージ動作をさせるために駆動する揉み動作部16、叩き動作部17及び押し引き動作部18を有している。
【0017】
揉み動作部16は、揉み用モータ16aと、揉み軸16bと、揉み用モータ16aの動力を揉み軸16bに伝達するギヤ等からなる動力伝達部(図示せず)とを有している。揉み軸16bの端部に軸部(図示せず)が偏心偏角して設けられており、この軸部に前記駆動アーム12が取り付けられている。この揉み駆動部16によれば、揉み用モータ16aが回転し揉み軸16bが回転すると、駆動アーム12及び支持アーム11が揺動する。これにより、施療子7は左右方向の成分を有する揉み動作を行なう。
【0018】
叩き動作部17は、叩き用モータ17aと、叩き軸17bと、叩き用モータ17aの動力を叩き軸17bに伝達するギヤ等からなる動力伝達部(図示せず)とを有している。叩き軸17bの端部に軸部(図示せず)が偏心して設けられており、この軸部に前記連結部材16cが取り付けられている。この叩き動作部17によれば、叩き用モータ17aが回転し叩き軸17bが回転すると、前記連結部材16cが偏心回転することで、駆動アーム12が左右方向の軸線に対して偏心回転する。これにより、施療子7は前後方向の成分を有する叩きマッサージ動作を行なう。この叩きマッサージ動作は、施療子7の軌跡が円(楕円)となる動作であり、この軌跡を1周すると1回の叩きマッサージ動作が行なわれる。
【0019】
押し引き動作部18は、押し引き用モータ18aと、左右のピニオン18bと、押し引き用モータ18aの動力をピニオン18bに伝達するシャフト及びギヤ等からなる動力伝達部18dと、左右のピニオン18bに噛合し前後方向に伸びるようにして設けられた左右のラック18cとを有している。押し引き用モータ18aは、施療子7、支持アーム11及び駆動アーム12を含む機械ブロック19を前後移動させる駆動源となる。なお、左右のピニオン18b及び左右のラック18cは、マッサージユニット5の上部と下部とにそれぞれ設けられている。
押し引き用モータ18aとピニオン18bとはマッサージユニット5の本体フレーム5aに取り付けられており、ラック18cは機械ブロック19に取り付けられている。この構成により、押し引き用モータ18aを正逆回転させることで、ピニオン18bが正逆回転し、これによりラック18cが前後移動し、このラック18cとともに機械ブロック19が前後移動する。これにより押し引き動作部18は、施療子7を使用者の身体に対して押し引き(接離)する方向へ移動させることができ、施療子7によって被施療者の身体(被施療部)、具体的には肩、背中、腰等に対して、後方から押す力として指圧力を与えることができる。
なお、昇降機構40、揉み動作部16、叩き動作部17及び押し引き動作部18は、通常用いられているものを適宜採用することができ、図示した以外のものであってもよい。
【0020】
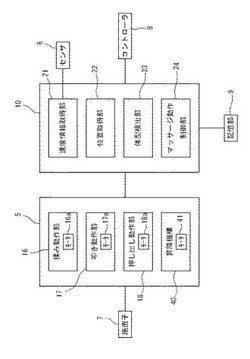
前記マッサージユニット5及び前記昇降機構40は、本発明のマッサージ機が備えている制御部10(図4参照)によって動作が制御される。具体的には、昇降用モータ41、揉み用モータ16a、叩き用モータ17a及び押し引き用モータ18aが、制御部10(図4参照)によって制御される。制御部10はこれらモータをPWM制御する。
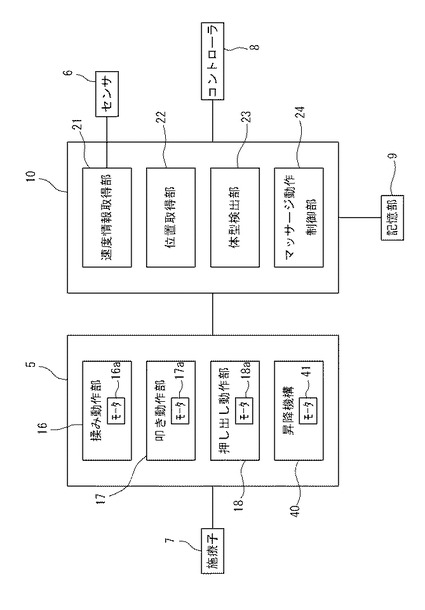
図4は、このマッサージ機の要部のブロック図である。制御部10は、CPU及び記憶部を有しているプログラマブルなマイコンからなる。所定の各機能を実行するプログラムが前記記憶部に格納されており、制御部10は、このプログラムが実行する機能部として、速度情報取得部21、位置取得部22、体型検出部23及びマッサージ動作制御部24を備えている。これらの機能部については後に説明する。
制御部10はマッサージ機が備えているコントローラ8の指令信号に基づいて動作する。コントローラ8には使用者が操作する複数の押しボタン等が設けられている。
【0021】
以上のように構成されたマッサージ機において、マッサージユニット5は、施療子7、揉み用モータ16a、叩き用モータ17a及びこれらモータの動力を施療子7に伝達し、施療子7に揉みや叩きのマッサージ動作をさせる動力伝達部を有している。この動力伝達部は、ギヤ、シャフト等の機械要素を含む構成である。したがって、使用者がこのマッサージ機の座部1に着座し、背凭れ部2に上半身を凭れかけると、その上半身(背中)が施療子7に当接することにより、当該施療子7に後方へ向かう荷重(負荷)が作用する。このように施療子7に荷重が作用している状態で、施療子7に叩き等のマッサージ動作を行なわせると、この作用する荷重の大小に応じて叩き用モータ17aの回転速度が変化し、これにより施療子7の叩きによるマッサージ動作の動作速度が変化することとなる。つまり、使用者の身体に施療子7が当接することによって、モータの負荷が変化し当該負荷に応じて施療子7の動作速度が変化する。
【0022】
速度情報取得部21(図4参照)について説明する。速度情報取得部21は、施療子7によって行なわれる叩きマッサージ動作の動作速度に関する速度情報を取得する。この実施の形態では、速度情報取得部21は、施療子7による1回の叩きマッサージ動作に要する時間幅に基づいて、速度情報を取得する。
このために、マッサージユニット5はセンサ6(図4参照)を有している。センサ6は、例えばホール素子を有するものであり、前記叩き動作部17の回転部(例えば動力伝達部の叩き軸17b)を検出対象としている。前記回転部を叩き軸17bとした場合について説明する。叩き軸17bが1回転すると、施療子7は1回の叩きマッサージ動作を行なう構成としている。これにより、叩き軸17bが一回転する毎にセンサ6は検出信号としてパルスを速度情報取得部21へ出力する。速度情報取得部21は前記パルスの数(累積数)を取得することができ、また、速度情報取得部21は時計機能を有しており、前記パルスの周期を各回毎に取得することができる。施療子7が叩きマッサージ動作を1回行なうための叩き軸17bの回転数は一定値(前記の場合は1回転)であり、この値を速度情報取得部21は有している。
【0023】
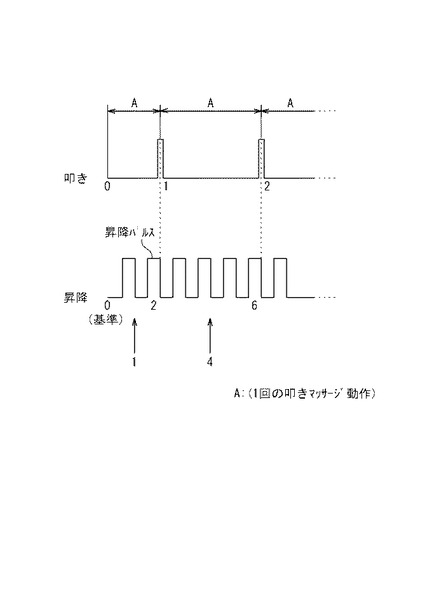
図5は、前記速度情報取得部21及び前記位置取得部22(図4参照)の機能を説明する説明図である。
以上より、前記パルスの1周期は、1回の叩きマッサージ動作に要する時間幅であり、速度情報取得部21は、この時間幅、つまり、叩きマッサージ動作のパルス幅A(図5参照)を取得することができる。そして、速度情報取得部21は、後に説明するが、このパルス幅A(施療子7による叩きマッサージ動作の1周期)に基づいて、速度情報(平均パルス幅データ)を取得する。
また、前記のとおり、速度情報取得部21が速度情報を取得するための施療子7による所定のマッサージ動作を叩きマッサージ動作としている。叩きマッサージ動作は、前後方向の成分を有する動作であり、また、使用者から施療子7に作用する荷重の方向も、前後方向の後方である。このため、使用者から施療子7に作用する荷重が変化すると、叩きマッサージ動作の速度の変化として表れやすい。つまり、使用者から施療子7に作用する荷重の変化は、施療子7の叩きマッサージ動作の速度変化に影響を与え易く、速度変化を精度良く求めることができる。
【0024】
前記位置取得部22について説明する。ここで、前記のとおり、昇降機構40がマッサージユニット5を使用者の上半身に沿うように上下直線移動させると、施療子7は所定の軌道、つまり、施療子7は前後方向に直交する平面上を上下移動する。具体的には、施療子7は上下方向について直線的に移動する。
そして、位置取得部22は、速度情報取得部21が前記パルス幅Aのデータ(以下、パルス幅データという)を取得した位置に対応する施療子7の前記軌道上の位置を求める。
具体的に説明すると、前記昇降用モータ41が回転すると、その回転によって信号(図5の昇降パルス)が発生する。すなわち、昇降機構40には例えばホール素子を有するセンサ(図示せず)が設けられており、このセンサは、昇降用モータ41によって回転する回転軸(図示せず)を検出対象としている。この回転軸が1回転する毎にセンサは検出信号として昇降パルスを位置取得部22へ出力する。
位置取得部22が昇降パルスを受けると、その回数を取得し記憶部9に記憶させる。昇降用モータ41による前記回転軸の回転数(昇降パルスの数)とマッサージユニット5の昇降移動量とは対応関係を有することから、位置取得部22は、昇降パルスに基づいてマッサージユニット5に搭載されている施療子7の前記軌道上の位置(上下方向の位置)を取得することができる。そして、位置取得部22は、前記速度情報取得部21がパルス幅データを取得する毎に、その取得した位置での施療子7の位置を取得する。
また、後に説明するが、位置取得部22は、既に求めた施療子7の軌道上の位置に基づいて、速度情報取得部21が前記速度情報を取得した位置に対応する施療子7の軌道における移動位置(昇降位置)を求める。
【0025】
そして、前記速度情報取得部21及び前記位置取得部22が得た、施療子7の前記昇降位置に対応した前記速度情報に基づいて、前記体型検出部23(図4参照)は、使用者の身体の凹凸形状を求める。この具体例は、後に説明するが、体型検出部23は、施療子7の前記所定の軌道(上下方向の軌道)を基準とした使用者の身体までの距離を求め、これに基づいて使用者の身体の凹凸形状を求める。
【0026】
前記マッサージ動作制御部24(図4参照)は、施療子7に叩き、揉み、指圧等のマッサージ動作をさせる制御を行なう。マッサージ動作制御部24は、体型検出部23によって検出した体型に基づいて、前記押し引き動作部18、前記昇降機構40、並びに、揉み動作部16又は叩き動作部17を動作させるべく動作信号を各モータへ送信する。
マッサージ動作制御部24は、体型検出部23が検出した体型に基づいて前記押し引き動作部18により施療子7(機械ブロック19)の押し引き量を変化させながら、前記昇降機構40によりマッサージユニット5を上下移動させて、施療子7に叩き、揉み、指圧等のマッサージ動作をさせる制御を行なう。つまり、マッサージを行なうための施療子7の移動軌道を決定し、この移動軌道に基づいて、使用者の体型に合わせて施療子7を押し引きしながら、施療子7に揉みや叩きなどのマッサージ動作をさせることができる。
【0027】
以上のように構成されたマッサージ機による体型検出及びこれに基づいて実行されるマッサージ方法(マッサージ機の動作方法)の具体例について説明する。
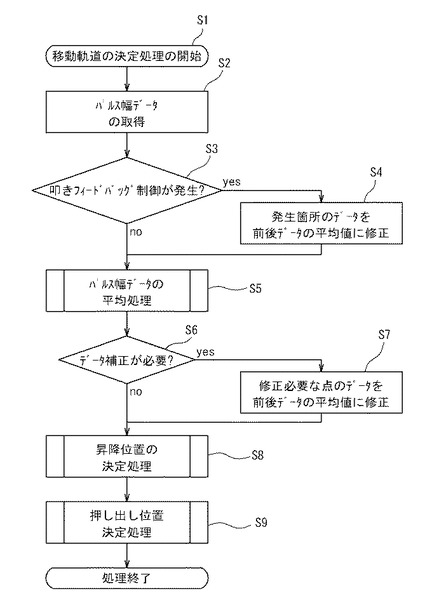
図6は、体型検出を行なうための処理を説明するフロー図である。マッサージ機は、マッサージを行なうための施療子7の移動軌道を決定する処理を開始する(ステップS1)。先ず、使用者の首部乃至肩部に対応する上昇位置(上限)と、腰部乃至臀部に対応する降下位置(下限)との間について、マッサージユニット5を昇降機構40によって使用者の身体に沿って1回(片道)移動させ、施療子7を直線の軌道上を移動させる。
そして、この間、制御部10は叩き動作部17を制御し、施療子7に叩きマッサージ動作を行なわせ、速度情報取得部21が前記パルス幅データを取得する(ステップS2)。取得したパルス幅データは記憶部9が記憶する。
【0028】
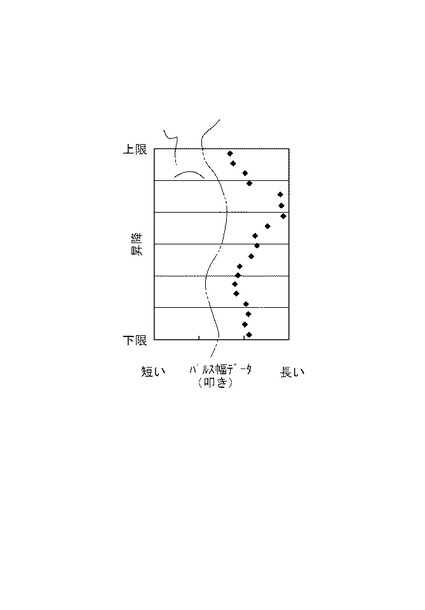
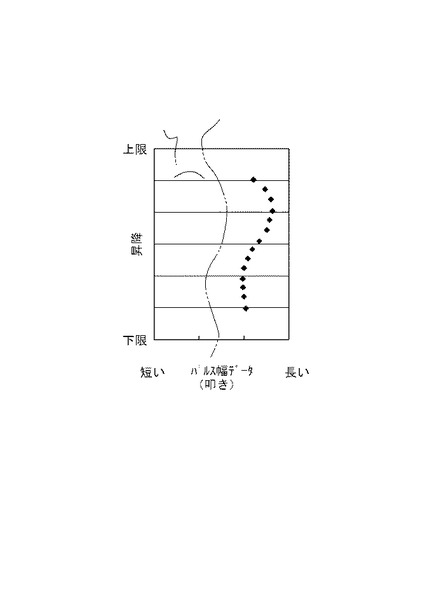
図7は、取得したパルス幅データと、これを取得した際の施療子7の位置との関係を示した図であり、施療子7を前記軌道上を移動させながら、パルス幅データを複数点について取得した結果である。取得されるパルス幅データは、前記のとおり、1回の叩きマッサージ動作に要する時間幅、つまり、パルス幅A(図5参照)であり、図7の横軸を「パルス幅データ(叩き)」としている。図7の場合、パルス幅データを19点取得している。使用者の体の内の膨らんでいる部分ではパルス幅データが長い。つまり、叩き用モータ17aの負荷が大きくなっており(高負荷状態)、施療子7の動作速度が、低負荷状態よりも遅くなっている。一方、使用者の体の内の凹んでいる部分ではパルス幅データが短い。つまり、叩き用モータ17aの負荷が小さくなっており(低負荷状態)、施療子7の動作速度が、高負荷状態よりも速くなっている。
なお、前記低負荷状態にあるモータの回転速度は、前記高負荷状態にある場合よりも速く、無負荷状態にある場合よりも遅い。そして、前記高負荷状態にあるモータの回転速度は、前記低負荷状態にある場合よりもさらに遅い。
【0029】
制御部10は、パルス幅データを取得すると、この取得の際に叩きフィードバック制御が発生していたか否かについての判定を行い(ステップS3)、発生していた場合(yesの場合)、制御部10は修正処理(ステップS4)を行なう。前記叩きフィードバック制御は、使用者から施療子7に作用する荷重(負荷)が大きく、叩きマッサージ動作が停止してしまうことを回避するために、叩き用モータ17aのPWM制御のパルス幅を調整するフィードバック制御である。つまり、叩きマッサージ動作の際に前記センサ6からのパルス(又は叩き用モータ17aからのパルス)が出力されていないと、制御部10は叩き用モータ17aに対するPWM制御のオン時間を長くし、叩きマッサージ動作の動作速度を上げる制御を自動的に行なう。
【0030】
このようなフィードバック制御が発生すると、叩き用モータ17aの回転速度が急に上昇するため、前記パルス幅A(図5参照)が急に小さくなる。この場合のパルス幅データの値は正確なものであるとはいえない。そこで、前記修正処理(ステップS4)では、値(パルス幅A)が急に小さくなったパルス幅データの前後のパルス幅データの平均値を、フィードバック制御が発生した点のパルス幅データとして置き換える処理を行なう。
【0031】
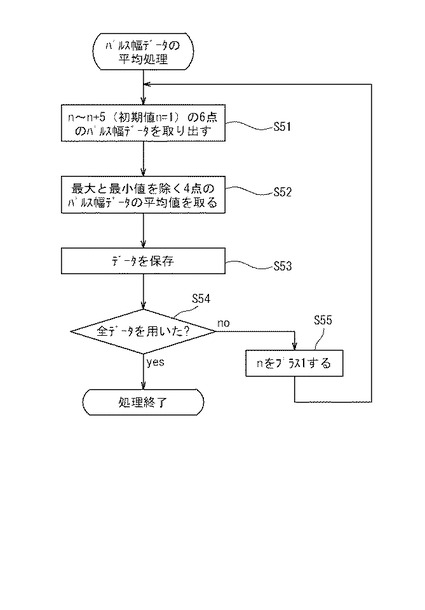
次に、速度情報取得部21は、取得したパルス幅データの平均処理を行なう(ステップS5)。図8はこの平均処理を説明するフロー図である。記憶部9が記憶している19点のパルス幅データ(図7)のうち、上限側(使用者の首側)からの6点のデータを、速度情報取得部21が取り出す(ステップS51、図8の初期値n=1)。速度情報取得部21は、この6点のうちの最大値と最小値とを除く4点のパルス幅データの平均値を求め(ステップS52)、この平均パルス幅データを記憶部9が記憶する(ステップS53)。
【0032】
このステップS51からステップS53の処理は、全てのデータが処理されるまで繰り返される(ステップS54とステップS55)。つまり、速度情報取得部21は、連続しているパルス幅データの所定数(6点)の内の最大値と最小値とを除く数(4点)を用いて、全てのパルス幅データについての移動平均を求めている。これにより、14点の平均パルス幅データが得られる(図9参照)。
【0033】
そして、制御部10は、前記平均パルス幅データの補正が必要であるか否かの判定を行なう(図6のステップS6)。この判定処理は、施療子を移動させる移動軌道をより滑らかな形状とするためのものであり、補正が必要であると判定されると、制御部10は補正処理を行なう(ステップS7)。
この補正処理は、得られた平均パルス幅データのうち、連続している3点A、B、Cについて、A>BかつC>Bである時、又は、A<BかつC<Bである時、Bについての平均パルス幅データを、その両隣りである平AとCの平均パルス幅データによる平均値として置き換える処理である。
【0034】
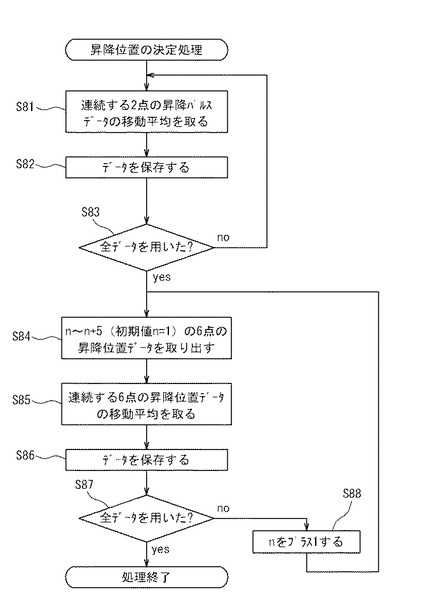
以上のように、速度情報取得部21はパルス幅データを取得し、さらに平均パルス幅データを求めていることから、これに対応するように、位置取得部22は、各パルス幅データが取得された際の施療子7の軌道上の位置、及び、この軌道上の位置に基づいて、前記各平均パルス幅データに対応した施療子7の前記軌道における昇降位置を求める処理を行なう(ステップS8)。図10は、この決定処理を説明しているフロー図である。
【0035】
この決定処理では、前半(図10のステップS81からステップS83)において、前記パルス幅データに対応する施療子7の軌道上の位置を求める。つまり、叩きマッサージ動作を開始した際の昇降パルスの数(基準:0、図5参照)と、叩きマッサージ動作を1回終えた際の昇降パルスの数(昇降パルス数=2)との平均値(平均値=1)を求め(ステップS81)、この平均値に基づいて(前記のとおり昇降パルスの数とマッサージユニット5の昇降移動量とは対応関係を有することから)1回目の叩きマッサージ動作をした際に得られたパルス幅データに対応する軌道上の移動位置(これを、昇降位置データという)を求める。そして、この昇降位置データを記憶部9が記憶する(ステップS82)。以下同様にして、各回の叩きマッサージ動作をした際に得られたパルス幅データに対応する昇降位置データを、連続する2点の昇降パルスの数の移動平均から求める(ステップS83)。これにより、19点のパルス幅データに対応して19点の昇降位置データが、位置取得部22によって求められる。
【0036】
また、前記のとおり速度情報取得部21は、19点のパルス幅データを平均処理し、14点の平均パルス幅データを取得していることから、これに対応させるために、位置取得部22は、前記決定処理の後半(図10のステップS84からステップS88)の処理を行なう。記憶部9が記憶している19点の前記昇降位置データのうち、上限側(使用者の首側)からの6点のデータを取り出す(ステップS84、図10の初期値n=1)。そして、この6点の昇降位置データの平均値を求め(ステップS85)、この平均昇降位置データを記憶部9が記憶する(ステップS86)。このステップS84からステップS86の処理は、全てのデータが処理されるまで繰り返される(ステップS87とステップS88)。つまり、位置取得部22は、連続している昇降位置データ(6点)を用いて、全ての昇降位置データについての移動平均を求めている。これにより、14点の平均昇降位置データが、位置取得部22によって得られる。
【0037】
そして、体型検出部23は、速度情報取得部21が求めた14点の平均パルス幅データ(これが速度情報である)と、位置取得部22が求めた14点の平均昇降位置データ(これが昇降位置である)とによって、図9に示しているような速度情報と昇降位置との基礎対応関係を取得する。この基礎対応関係が、使用者の体型(上半身の背面側の凹凸形状)を表現したものであり、これにより、体型検出部23は体型検出が可能となっている。
【0038】
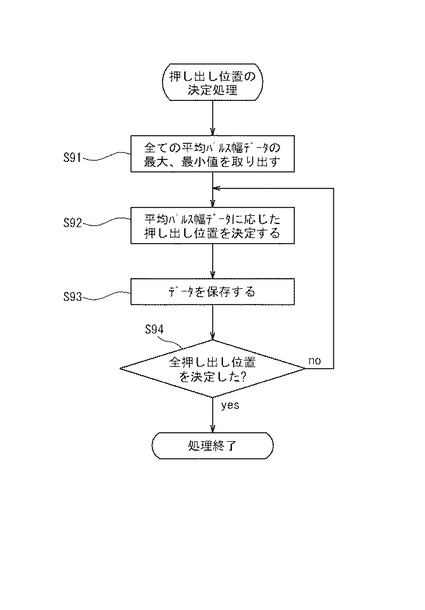
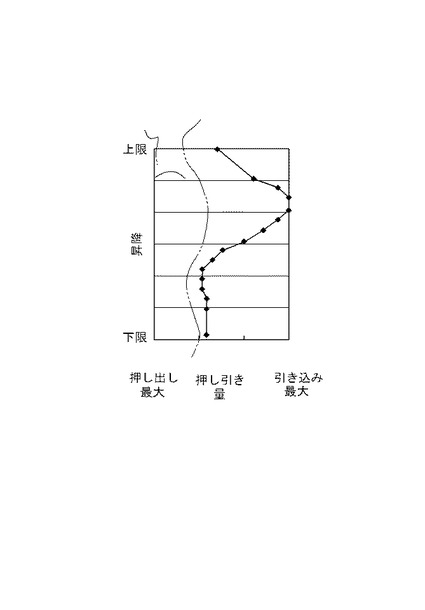
そして、マッサージ動作制御部24は、施療子7の押出し位置の決定処理を行なう(図6のステップS9)。図11はこの決定処理を説明するフロー図である。図12は、決定処理を終えることによって得られる施療子7の前記移動軌道を説明している説明図である。
マッサージ動作制御部24は、記憶部9が記憶している全ての平均パルス幅データ(速度情報)から最大値(つまり、叩きマッサージ動作に要する時間幅が最も長い場合)と、最小値(つまり、叩きマッサージ動作に要する時間幅が最も短い場合)とを抽出する。そして、最大値を、施療子7の「引き込み最大値」と設定し、押し引き動作部18によって施療子7(機械ブロック19)を最も引き込んだ状態とするように設定する。また、最小値を、施療子7の「押し出し最大値」と設定し、押し引き動作部18によって施療子7(機械ブロック19)を最も押し出した状態とするように設定する(ステップS91)。
なお、前記「引き込み最大値」を、押し引き動作部18によって施療子7を最も引き込むことができる機械的な限界値(押し引き動作部18の構造上の限界値)としてもよいが、「引き込み最大値」を、この限界値未満の所定の値とすることができる。
同様に、前記「押し出し最大値」を、押し引き動作部18によって施療子7を最も押し出すことができる機械的な限界値としてもよいが、「押し出し最大値」を、この限界値未満の所定の値とすることができる。この所定の値はマッサージ動作制御部24により決定され、押し出しについての前記所定の値を前記限界値に近づけることで、強いマッサージが可能となる。
【0039】
そして、マッサージ動作制御部24は、残りの平均パルス幅データ(速度情報)に対応する施療子7(機械ブロック19)の押し引き量を、各平均パルス幅データの値に応じて、前記「引き込み最大値」と前記「押し出し最大値」との間の比例配分によって決定し、施療子7(機械ブロック19)の各押し引き量を記憶部9に記憶させる処理を行なう(ステップS92からステップS94まで)。
以上より、マッサージ動作制御部24は、図12に示しているように施療子7の移動軌道を決定することができる。
そして、マッサージ動作制御部24は、昇降機構40、押し引き動作部18に動作制御信号を送信し、施療子7が決定された前記移動軌道に沿って移動するように制御する。そして、この移動軌道に沿って移動する施療子7は、叩き動作部17、揉み動作部16又は押し引き動作部18によって、叩き、揉み又は指圧によるマッサージ動作が行なわれる。
【0040】
以上のように構成されたマッサージ機の動作方法は(このマッサージ機によって実行されるマッサージ方法は)、施療子7の動作速度に関する速度情報を取得すると共に、この速度情報を取得した位置に対応する施療子7の上下方向の前記軌道における昇降位置を求め、この施療子7の各昇降位置に対応した速度情報に基づいて使用者の身体の凹凸形状を求めて体型を検出し、検出した体型に基づいて施療子7(機械ブロック19)の身体に対する押し引き量を変化させながら施療子7(マッサージユニット5)を使用者の身体に沿って上下移動させて、施療子7を揉みや叩きなどのマッサージ動作させることによって行なわれる。
【0041】
このように構成されたマッサージ機によれば、使用者の体型を検出することができ、この体型に応じて施療子7を押し引きしながらマッサージ動作が行なわれるため、身体と施療子7との位置関係が調整されて、体型に応じて適切なマッサージが行なわれる。つまり、背中等の膨らんでいる被施療部に対しては、施療子7を比較的引き込み(後方に移動させ)、施療子7がこのような被施療部に強く当りすぎることを防止することができる。一方、腰等の凹んでいる被施療部に対しては、施療子7を比較的押出し(前方に移動させ)、このような被施療部に対する施療子7の当りが弱くなりすぎることを防止することができる。これにより、適切な強さのマッサージを行なうことが可能となる。
【0042】
また、このマッサージ機の記憶部9にはマッサージプログラムが記憶されており、マッサージプログラムは、所定のマッサージ動作を実行するマッサージコースを有している。
このマッサージプログラムは、コントローラ8の選択ボタンが使用者によって選択されることで、制御部(マッサージ動作制御部24)が実行する。このマッサージプログラムが開始されると、始めに、前記の体型検出が行なわれるようにプログラムされている。これにより、まず、使用者の体型の検出が行なわれ、後のマッサージ動作に反映することができる。
【0043】
また、このマッサージコースは、所定のマッサージ動作を実行するマッサージステップとして、施療子7が叩きマッサージ動作を実行する叩きステップを有している。そして、この叩きステップの実行中に、速度情報取得部21が取得した施療子7の前記速度情報と、位置取得部22が求めた施療子7の前記昇降位置とに基づいて、体型検出部23が使用者の体型を検出することができる。この場合、前記の始めの体型検出を省略することができる。
または、前記の始めの体型検出を行い、さらに、マッサージコース中(叩きステップ中)に体型検出を行なっても良い。この場合、マッサージコース中で検出した体型検出の情報を、始めの体型検出の情報と入れ替えて更新してもよく、または、マッサージコース中で検出した体型検出の情報を、始めの体型検出の情報を部分的に補正するために用いても良い。
【0044】
また、本発明のマッサージ機は、前記のように使用者の上半身の略全体における凹凸形状を検出することができるが、前記制御部10による体型検出によって、身体の部分的な形状を検出することもできる。具体的に説明すると、前記のようにマッサージ動作を実行させながら施療子7を下部である臀部から上部である首部へと移動させる。臀部では、施療子7に作用する荷重が腰部よりも大きく背中よりも小さい中程度であり、叩き用モータ17a等の各モータの負荷が中程度となる。腰部では、施療子7に作用する荷重が臀部よりも小さく、モータの負荷が小となる(又は無負荷となる)。背中部では、施療子7に作用する荷重が臀部及び腰部よりも大きく、モータの負荷が大となる。肩部では、施療子7に作用する荷重が背中部よりも小さい中程度であり、モータの負荷が中程度となる。そして、施療子7が肩部を越えると、施療子7に作用する荷重が肩部よりも小さく、モータの負荷が小となる(又は無負荷となる)。
このように、制御部10は、施療子7が肩部を越えた際の施療子7の動作速度に関する速度情報を取得し、また、この際における施療子7の移動位置を取得することで、これら速度情報と移動位置の情報とに基づいて、肩位置の検出を行なうことができる。さらに、制御部10は、モータの負荷が前記のように大小変化した経過を検出して、施療子7が肩部を越えたことを検出しているため、肩部と、これ以外である腰部等との区別ができる。
【0045】
また、本発明のマッサージ機は、図1に示しているように背凭れ部2を備えており、背凭れ部2は座部1側にある左右水平方向の軸心回りに回動し、リクライニング動作を行なうことができる。背凭れ部2のリクライニング角度(傾斜角度)が変化すると、この背凭れ部2に凭れている使用者の身体に当接している施療子7に作用する荷重も変化する。これにより、叩き用モータ17a等の各モータの負荷が、リクライニング角度に応じて変化する。
また、背凭れ部2がリクライニング動作を行なうと、この背凭れ部2に凭れている使用者の位置がずれることがある。つまり、リクライニング動作が行なわれると、背凭れ部2と使用者の身体との相対位置が変化することがある。
そこで、本発明では、背凭れ部2のリクライニング動作が行なわれると(リクライニング角度が変化すると)、制御部10は前記体型検出と前記肩位置検出との内の一方又は双方を行なうように構成してもよい。すなわち、リクライニング動作が行なわれる度に、制御部10は使用者の体型について再検出を行なうように構成してもよい。
【0046】
さらに、背凭れ部2がリクライニング動作をしていなくても、使用者が体勢を変更した(座り直した)場合も、背凭れ部2と使用者の身体との相対位置が変化することがある。この場合であっても、制御部10は、マッサージコース中(叩きステップ中)に体型検出を再度実行することにより、再検出した体型検出の情報を、始めの(前の)体型検出の情報と入れ替えて更新したり、始めの(前の)体型検出の情報を部分的に補正したりする。
このように、制御部10が体型検出を自動的に変更(更新)するように構成することで、マッサージコース中に使用者の位置が変化しても、適切なマッサージをその後行なうことができる。また、制御部10が自動的に更新することで、使用者がコントローラ8を操作して体型検出をやり直す(肩位置の修正を行なう)手間を省くことができる。
【0047】
また、前記のとおり、制御部10は、図12に示しているように、施療子7の移動軌道を決定し、昇降機構40、押し引き動作部18に動作制御信号を送信し、施療子7が決定された前記移動軌道に沿って移動するように制御する。さらに、この移動軌道に沿って移動する施療子7は、叩き動作部17、揉み動作部16又は押し引き動作部18によって、叩き、揉み又は指圧によるマッサージ動作が行なわれる。
さらに、コントローラ8にはマッサージ動作の強さの調整に関する調整スイッチ(調整ボタン)が設けられており、使用者がコントローラ8を操作してマッサージ強さの調整を行なうと、制御部10(マッサージ動作制御部24)は、前記移動軌道の変更を実行するように構成してもよい。すなわち、制御部10は、図12に示している移動軌道を押し出し側(使用者側)へシフト(移行)させる処理を行なうことで、マッサージ強さを強くすることができる。反対に、移動軌道を引き込み側(反使用者側)へシフト(移行)させる処理を行なうことで、マッサージ強さを弱くすることができる。
なお、この移動軌道のシフトは、全体であってもよく、部分的であってもよい。つまり、移動軌道の全体をシフトさせれば、肩部から腰部にわたる全体に対するマッサージ強さが変更され、移動軌道を部分的にシフトさせれば(例えば肩部や腰部についてのみ移動軌道をシフトさせれば)、当該部分に対してのみマッサージ強さが変更される。
【0048】
または、マッサージ強さの調整のために、制御部10は、図12に示している移動軌道の最大押し出しと最大引き込みとの間の振幅を大小変更するようにして、移動軌道の変更をしてもよい。この場合、押し出し側については、より一層施療子7の押し出し量が増大し、引き込み側については、より一層施療子7の引き込み量が増大し、マッサージ強さにメリハリを付けることができる。
【0049】
また、本発明では、マッサージプログラム(マッサージコース)開始時における体型検出の後に(又は検出の前に)、制御部10は、マッサージ強さの調整を行なう旨を使用者に報知し、コントローラ8からマッサージ強さの調整に関する信号を受けると、前記のように移動軌道の変更を実行し、マッサージを開始してもよい。または、制御部10は、マッサージ強さの変更をマッサージコースの途中で受け付けても良く、そのために、マッサージコースの途中でマッサージ強さの調整を行なう旨を使用者に報知する。なお、前記報知は、コントローラ8の表示部における表示と、音声の発生との一方又は双方により実行することができる。
【0050】
また、本発明のマッサージ機は、図示する形態に限らず本発明の範囲内において他の形態のものであっても良い。前記実施形態では、施療子7の前記速度情報を得るために、1回の叩きマッサージ動作の周期を求めており、このために、叩き軸17bにセンサを設けた場合を説明したが、センサは他の部分に設けてもよい。また、所定のマッサージ動作に要する時間幅を、1回の叩きマッサージ動作に要する時間(1回の叩きマッサージ動作の周期)として説明したが、1回に限らず複数回のマッサージ動作に要する時間としてもよい。また、叩きマッサージ動作以外に、揉みマッサージ動作であってもよい。
【図面の簡単な説明】
【0051】
【図1】本発明のマッサージ機の実施の一形態を示す斜視図である。
【図2】マッサージユニットを前方から見た斜視図である。
【図3】マッサージユニットを後方から見た斜視図である。
【図4】マッサージ機の要部のブロック図である。
【図5】速度情報取得部及び位置取得部の機能を説明する説明図である。
【図6】体型検出を行なうための処理を説明するフロー図である。
【図7】取得したパルス幅データと、施療子の軌道上の位置との関係を示した説明図である。
【図8】平均処理を説明するフロー図である。
【図9】速度情報と昇降位置との基礎対応関係を示した説明図である。
【図10】施療子の昇降位置を求める処理を説明しているフロー図である。
【図11】施療子の押出し位置の決定を行なう処理を説明するフロー図である。
【図12】決定処理を終えることによって得られる施療子の移動軌道を説明している説明図である。
【符号の説明】
【0052】
5 マッサージユニット
7 施療子
17 叩き動作部
17a 叩き用モータ
18 押し引き動作部
21 速度情報取得部
22 位置取得部
23 体型検出部
24 マッサージ動作制御部
40 昇降機構(移動機構)
【技術分野】
【0001】
本発明は、マッサージ機及びマッサージ方法に関する。
【背景技術】
【0002】
椅子型マッサージ機が、使用者の身長の高低に応じて適切なマッサージを行なうために、当該椅子型マッサージ機が使用者毎の肩の位置を検出し記憶する技術が各種提案されている(例えば、特許文献1参照)。特許文献1に記載の椅子型マッサージ機では、背凭れ部内において施療子を上から下へ移動させ、施療子が使用者の肩に当った時の位置を肩位置として記憶するように構成されている。
【0003】
【特許文献1】特開2003−52780号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、前記のような従来技術では、肩の位置を検出することはできるが、例えば肩から腰までの凹凸形状、つまり、使用者の上半身背面側の体型までを検出することはできない。このような使用者の体型を検出することができれば、その体型に基づいて施療子の突出量を調整することができ、さらに適切なマッサージが行なわれる。
そこで、本発明は、使用者の体型を検出することができるマッサージ機及びこのマッサージ機によって行なわれるマッサージ方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するための本発明のマッサージ機は、施療子、モータ及びこのモータの動力を前記施療子に伝達し当該施療子を動作させる動力伝達部を有しているマッサージユニットと、前記施療子が所定の軌道に沿って移動するように前記マッサージユニットを使用者の身体に沿って移動させる移動機構とを備え、使用者の身体に前記施療子が当接することによって前記モータの負荷が変化し当該負荷に応じて当該施療子の動作速度が変化するマッサージ機であって、前記施療子の前記動作速度に関する速度情報を取得する速度情報取得部と、前記速度情報を取得した位置に対応する前記施療子の前記所定の軌道における移動位置を取得する位置取得部と、前記施療子の前記移動位置に対応した前記速度情報に基づいて使用者の身体の凹凸形状を求める体型検出部とを備えたものである。
【0006】
本発明のマッサージ機が備えているマッサージユニットによれば、使用者の身体に施療子が当接することによってモータの負荷が変化し、その負荷に応じて施療子の動作速度が変化する。つまり、前記移動機構によってマッサージユニットを使用者の身体に沿って移動させ、施療子を所定の軌道に沿って移動させると、その身体の内の前記軌道に比較的近い部分(膨らんでいる部分)では、施療子に作用する荷重は大きくなり、モータの負荷が大きくなって(高負荷状態)、モータの回転速度が下記の低負荷状態よりも遅くなることから施療子の動作速度も遅くなる。一方、身体の内の前記軌道から比較的離れている部分(凹んでいる部分)では、施療子に作用する荷重は小さくなり、モータの負荷が小さくなって(低負荷状態)、モータの回転速度が前記高負荷状態よりも速くなることから施療子の動作速度も速くなる。
そこで、移動機構によって施療子を前記軌道に沿って移動させる際に、速度情報取得部が、施療子の動作速度に関する速度情報を取得し、位置取得部が、前記速度情報を取得した位置に対応する施療子の前記軌道における移動位置を取得する。そして、体型検出部が、施療子の前記移動位置における速度情報に基づいて、使用者の身体の凹凸形状を求めることにより、使用者の体型(凹凸)を検出することができる。
【0007】
また、前記マッサージ機において、前記速度情報取得部は、前記施療子による所定のマッサージ動作に要する時間幅に基づいて、前記速度情報を取得するのが好ましい。
これによれば、施療子に作用する荷重が大きくなるように変化し、施療子による所定のマッサージ動作の速度が遅くなるように変化すると、速度情報取得部は大きい値の時間幅を取得することができる。一方、施療子に作用する荷重が小さくなるように変化し、施療子による所定のマッサージ動作の速度が速くなるように変化すると、速度情報取得部は小さい値の時間幅を取得することができる。
【0008】
また、前記所定のマッサージ動作は、使用者側を前方とし前記マッサージユニット側を後方とした前後方向の成分を有する叩きマッサージ動作であり、前記速度情報取得部は、前記施療子による所定回数の前記叩きマッサージ動作に要する時間幅に基づいて、前記速度情報を取得するのが好ましい。
施療子による叩きマッサージ動作は前後方向の成分を有する動作であり、また、使用者から施療子が受ける荷重の方向も、前後方向の後方である。このため、使用者から施療子に作用する荷重の変化は、施療子の叩きマッサージ動作の速度変化に影響を与え易い。したがって、使用者から施療子に作用する荷重の変化に基づく叩きマッサージ動作の速度の変化を検出し易くなり、体型検出の精度を高めることができる。
【0009】
また、前記マッサージ機は、前記施療子を前記使用者の身体に対して押し引きする方向へ移動させる押し引き動作部と、前記体型検出部によって検出した体型に基づいて前記押し引き動作部により前記施療子の押し引き量を変化させながら前記移動機構により前記マッサージユニットを移動させて、当該施療子にマッサージ動作をさせる制御を行なうマッサージ動作制御部とを更に備えているのが好ましい。
これによれば、使用者の体型に沿って施療子を押し引きしながら当該施療子にマッサージ動作を実行させることができる。
【0010】
また、前記マッサージ機は、前記施療子に所定のマッサージ動作をさせるステップを有するマッサージコースを記憶している記憶部を更に備え、前記ステップの実行中に前記速度情報取得部が取得した前記施療子の前記速度情報と、前記位置取得部が求めた前記施療子の前記位置とに基づいて、前記体型検出部が使用者の体型を検出するのが好ましい。
これによれば、施療子が所定のマッサージ動作を行なっているステップの実行中に、体型検出を行なうことができる。
【0011】
また、本発明は、モータの動力が施療子に伝達し当該施療子が動作すると共に、前記施療子が所定の軌道上を移動し、かつ、使用者の身体に前記施療子が当接することによって前記モータの負荷が変化し当該負荷に応じて当該施療子の動作速度が変化するマッサージ機が実行するマッサージ方法であって、前記施療子の前記動作速度に関する速度情報を取得すると共に、前記速度情報を取得した位置に対応する前記施療子の前記所定の軌道における移動位置を求め、前記施療子の前記移動位置に対応した前記速度情報に基づいて使用者の身体の凹凸形状を求めて体型を検出し、検出した体型に基づいて前記施療子の身体に対する押し引き量を変化させながら当該施療子を使用者の身体に沿って移動させて、当該施療子をマッサージ動作させることによって行なわれる。
このマッサージ方法によれば、使用者の体型を検出することができ、この体型に応じて施療子を押し引きしながらマッサージ動作が行なわれるため、身体と施療子との位置関係が調整されて適切なマッサージが行なわれる。
【発明の効果】
【0012】
本発明によれば、施療子の各位置における速度情報に基づいて、使用者の身体の凹凸形状を求めることにより、使用者の体型を検出することができる。使用者の体型を検出することにより、その体型に基づいて身体に対する施療子の前後位置を調整することができ、体型に応じた適切なマッサージを行なうことが可能となる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は本発明のマッサージ機の実施の一形態を示す斜視図である。このマッサージ機は、脚体4により支持された座部1と、この座部1の後側に設けられた背凭れ部2と、座部1の前側に設けられた脚載せ部3とを備えており、椅子型である。背凭れ部2はリクライニング可能であり、脚載せ部3は、座部1側を中心として上下回動可能である。なお、以下において、背凭れ部4の幅方向を「左右方向」、高さ方向を「上下方向」、奥行き方向(厚さ方向)を「前後方向」という。
【0014】
背凭れ部2内には、上下施療子7a,7b(以下、まとめて施療子7ともいう)を左右に有しているマッサージユニット5が設けられている。マッサージユニット5は、背凭れ部2の内部に左右一対に設けられたガイドレール31にガイドされている。
図2はマッサージユニット5を前方から見た斜視図であり、図3は後方から見た斜視図である。マッサージユニット5は、昇降機構(移動機構)40の駆動によってガイドレール31に沿って上下移動する。
【0015】
この実施の形態では、昇降機構40はマッサージユニット5に搭載されている。昇降機構40は、昇降用モータ41と、ピニオン42と、昇降用モータ41の動力をピニオン42に伝達しピニオン42を回転させる動力伝達部43とを有している。ピニオン42は、図1に示したガイドレール31に沿って設けられたラック(図示せず)と噛合する。これにより、昇降用モータ41が正逆回転すると、マッサージユニット5はガイドレール31に沿って上下移動する。ガイドレール31は上下方向直線状に伸びており、マッサージユニット5は上下方向に直線移動することができる。
【0016】
図2において、施療子7は、マッサージユニット5の左右両側のそれぞれに上下一対設けられている。上下の施療子7a,7bは支持アーム11の両端部に取り付けられている。支持アーム11は駆動アーム12に揺動可能として取り付けられている。また、駆動アーム12と後述する叩き軸17bとは、自在継手部を有する連結部材16cによって連結されている。
また、図2と図3において、マッサージユニット5は施療子7によって揉み、叩き、指圧のマッサージ動作をさせるために駆動する揉み動作部16、叩き動作部17及び押し引き動作部18を有している。
【0017】
揉み動作部16は、揉み用モータ16aと、揉み軸16bと、揉み用モータ16aの動力を揉み軸16bに伝達するギヤ等からなる動力伝達部(図示せず)とを有している。揉み軸16bの端部に軸部(図示せず)が偏心偏角して設けられており、この軸部に前記駆動アーム12が取り付けられている。この揉み駆動部16によれば、揉み用モータ16aが回転し揉み軸16bが回転すると、駆動アーム12及び支持アーム11が揺動する。これにより、施療子7は左右方向の成分を有する揉み動作を行なう。
【0018】
叩き動作部17は、叩き用モータ17aと、叩き軸17bと、叩き用モータ17aの動力を叩き軸17bに伝達するギヤ等からなる動力伝達部(図示せず)とを有している。叩き軸17bの端部に軸部(図示せず)が偏心して設けられており、この軸部に前記連結部材16cが取り付けられている。この叩き動作部17によれば、叩き用モータ17aが回転し叩き軸17bが回転すると、前記連結部材16cが偏心回転することで、駆動アーム12が左右方向の軸線に対して偏心回転する。これにより、施療子7は前後方向の成分を有する叩きマッサージ動作を行なう。この叩きマッサージ動作は、施療子7の軌跡が円(楕円)となる動作であり、この軌跡を1周すると1回の叩きマッサージ動作が行なわれる。
【0019】
押し引き動作部18は、押し引き用モータ18aと、左右のピニオン18bと、押し引き用モータ18aの動力をピニオン18bに伝達するシャフト及びギヤ等からなる動力伝達部18dと、左右のピニオン18bに噛合し前後方向に伸びるようにして設けられた左右のラック18cとを有している。押し引き用モータ18aは、施療子7、支持アーム11及び駆動アーム12を含む機械ブロック19を前後移動させる駆動源となる。なお、左右のピニオン18b及び左右のラック18cは、マッサージユニット5の上部と下部とにそれぞれ設けられている。
押し引き用モータ18aとピニオン18bとはマッサージユニット5の本体フレーム5aに取り付けられており、ラック18cは機械ブロック19に取り付けられている。この構成により、押し引き用モータ18aを正逆回転させることで、ピニオン18bが正逆回転し、これによりラック18cが前後移動し、このラック18cとともに機械ブロック19が前後移動する。これにより押し引き動作部18は、施療子7を使用者の身体に対して押し引き(接離)する方向へ移動させることができ、施療子7によって被施療者の身体(被施療部)、具体的には肩、背中、腰等に対して、後方から押す力として指圧力を与えることができる。
なお、昇降機構40、揉み動作部16、叩き動作部17及び押し引き動作部18は、通常用いられているものを適宜採用することができ、図示した以外のものであってもよい。
【0020】
前記マッサージユニット5及び前記昇降機構40は、本発明のマッサージ機が備えている制御部10(図4参照)によって動作が制御される。具体的には、昇降用モータ41、揉み用モータ16a、叩き用モータ17a及び押し引き用モータ18aが、制御部10(図4参照)によって制御される。制御部10はこれらモータをPWM制御する。
図4は、このマッサージ機の要部のブロック図である。制御部10は、CPU及び記憶部を有しているプログラマブルなマイコンからなる。所定の各機能を実行するプログラムが前記記憶部に格納されており、制御部10は、このプログラムが実行する機能部として、速度情報取得部21、位置取得部22、体型検出部23及びマッサージ動作制御部24を備えている。これらの機能部については後に説明する。
制御部10はマッサージ機が備えているコントローラ8の指令信号に基づいて動作する。コントローラ8には使用者が操作する複数の押しボタン等が設けられている。
【0021】
以上のように構成されたマッサージ機において、マッサージユニット5は、施療子7、揉み用モータ16a、叩き用モータ17a及びこれらモータの動力を施療子7に伝達し、施療子7に揉みや叩きのマッサージ動作をさせる動力伝達部を有している。この動力伝達部は、ギヤ、シャフト等の機械要素を含む構成である。したがって、使用者がこのマッサージ機の座部1に着座し、背凭れ部2に上半身を凭れかけると、その上半身(背中)が施療子7に当接することにより、当該施療子7に後方へ向かう荷重(負荷)が作用する。このように施療子7に荷重が作用している状態で、施療子7に叩き等のマッサージ動作を行なわせると、この作用する荷重の大小に応じて叩き用モータ17aの回転速度が変化し、これにより施療子7の叩きによるマッサージ動作の動作速度が変化することとなる。つまり、使用者の身体に施療子7が当接することによって、モータの負荷が変化し当該負荷に応じて施療子7の動作速度が変化する。
【0022】
速度情報取得部21(図4参照)について説明する。速度情報取得部21は、施療子7によって行なわれる叩きマッサージ動作の動作速度に関する速度情報を取得する。この実施の形態では、速度情報取得部21は、施療子7による1回の叩きマッサージ動作に要する時間幅に基づいて、速度情報を取得する。
このために、マッサージユニット5はセンサ6(図4参照)を有している。センサ6は、例えばホール素子を有するものであり、前記叩き動作部17の回転部(例えば動力伝達部の叩き軸17b)を検出対象としている。前記回転部を叩き軸17bとした場合について説明する。叩き軸17bが1回転すると、施療子7は1回の叩きマッサージ動作を行なう構成としている。これにより、叩き軸17bが一回転する毎にセンサ6は検出信号としてパルスを速度情報取得部21へ出力する。速度情報取得部21は前記パルスの数(累積数)を取得することができ、また、速度情報取得部21は時計機能を有しており、前記パルスの周期を各回毎に取得することができる。施療子7が叩きマッサージ動作を1回行なうための叩き軸17bの回転数は一定値(前記の場合は1回転)であり、この値を速度情報取得部21は有している。
【0023】
図5は、前記速度情報取得部21及び前記位置取得部22(図4参照)の機能を説明する説明図である。
以上より、前記パルスの1周期は、1回の叩きマッサージ動作に要する時間幅であり、速度情報取得部21は、この時間幅、つまり、叩きマッサージ動作のパルス幅A(図5参照)を取得することができる。そして、速度情報取得部21は、後に説明するが、このパルス幅A(施療子7による叩きマッサージ動作の1周期)に基づいて、速度情報(平均パルス幅データ)を取得する。
また、前記のとおり、速度情報取得部21が速度情報を取得するための施療子7による所定のマッサージ動作を叩きマッサージ動作としている。叩きマッサージ動作は、前後方向の成分を有する動作であり、また、使用者から施療子7に作用する荷重の方向も、前後方向の後方である。このため、使用者から施療子7に作用する荷重が変化すると、叩きマッサージ動作の速度の変化として表れやすい。つまり、使用者から施療子7に作用する荷重の変化は、施療子7の叩きマッサージ動作の速度変化に影響を与え易く、速度変化を精度良く求めることができる。
【0024】
前記位置取得部22について説明する。ここで、前記のとおり、昇降機構40がマッサージユニット5を使用者の上半身に沿うように上下直線移動させると、施療子7は所定の軌道、つまり、施療子7は前後方向に直交する平面上を上下移動する。具体的には、施療子7は上下方向について直線的に移動する。
そして、位置取得部22は、速度情報取得部21が前記パルス幅Aのデータ(以下、パルス幅データという)を取得した位置に対応する施療子7の前記軌道上の位置を求める。
具体的に説明すると、前記昇降用モータ41が回転すると、その回転によって信号(図5の昇降パルス)が発生する。すなわち、昇降機構40には例えばホール素子を有するセンサ(図示せず)が設けられており、このセンサは、昇降用モータ41によって回転する回転軸(図示せず)を検出対象としている。この回転軸が1回転する毎にセンサは検出信号として昇降パルスを位置取得部22へ出力する。
位置取得部22が昇降パルスを受けると、その回数を取得し記憶部9に記憶させる。昇降用モータ41による前記回転軸の回転数(昇降パルスの数)とマッサージユニット5の昇降移動量とは対応関係を有することから、位置取得部22は、昇降パルスに基づいてマッサージユニット5に搭載されている施療子7の前記軌道上の位置(上下方向の位置)を取得することができる。そして、位置取得部22は、前記速度情報取得部21がパルス幅データを取得する毎に、その取得した位置での施療子7の位置を取得する。
また、後に説明するが、位置取得部22は、既に求めた施療子7の軌道上の位置に基づいて、速度情報取得部21が前記速度情報を取得した位置に対応する施療子7の軌道における移動位置(昇降位置)を求める。
【0025】
そして、前記速度情報取得部21及び前記位置取得部22が得た、施療子7の前記昇降位置に対応した前記速度情報に基づいて、前記体型検出部23(図4参照)は、使用者の身体の凹凸形状を求める。この具体例は、後に説明するが、体型検出部23は、施療子7の前記所定の軌道(上下方向の軌道)を基準とした使用者の身体までの距離を求め、これに基づいて使用者の身体の凹凸形状を求める。
【0026】
前記マッサージ動作制御部24(図4参照)は、施療子7に叩き、揉み、指圧等のマッサージ動作をさせる制御を行なう。マッサージ動作制御部24は、体型検出部23によって検出した体型に基づいて、前記押し引き動作部18、前記昇降機構40、並びに、揉み動作部16又は叩き動作部17を動作させるべく動作信号を各モータへ送信する。
マッサージ動作制御部24は、体型検出部23が検出した体型に基づいて前記押し引き動作部18により施療子7(機械ブロック19)の押し引き量を変化させながら、前記昇降機構40によりマッサージユニット5を上下移動させて、施療子7に叩き、揉み、指圧等のマッサージ動作をさせる制御を行なう。つまり、マッサージを行なうための施療子7の移動軌道を決定し、この移動軌道に基づいて、使用者の体型に合わせて施療子7を押し引きしながら、施療子7に揉みや叩きなどのマッサージ動作をさせることができる。
【0027】
以上のように構成されたマッサージ機による体型検出及びこれに基づいて実行されるマッサージ方法(マッサージ機の動作方法)の具体例について説明する。
図6は、体型検出を行なうための処理を説明するフロー図である。マッサージ機は、マッサージを行なうための施療子7の移動軌道を決定する処理を開始する(ステップS1)。先ず、使用者の首部乃至肩部に対応する上昇位置(上限)と、腰部乃至臀部に対応する降下位置(下限)との間について、マッサージユニット5を昇降機構40によって使用者の身体に沿って1回(片道)移動させ、施療子7を直線の軌道上を移動させる。
そして、この間、制御部10は叩き動作部17を制御し、施療子7に叩きマッサージ動作を行なわせ、速度情報取得部21が前記パルス幅データを取得する(ステップS2)。取得したパルス幅データは記憶部9が記憶する。
【0028】
図7は、取得したパルス幅データと、これを取得した際の施療子7の位置との関係を示した図であり、施療子7を前記軌道上を移動させながら、パルス幅データを複数点について取得した結果である。取得されるパルス幅データは、前記のとおり、1回の叩きマッサージ動作に要する時間幅、つまり、パルス幅A(図5参照)であり、図7の横軸を「パルス幅データ(叩き)」としている。図7の場合、パルス幅データを19点取得している。使用者の体の内の膨らんでいる部分ではパルス幅データが長い。つまり、叩き用モータ17aの負荷が大きくなっており(高負荷状態)、施療子7の動作速度が、低負荷状態よりも遅くなっている。一方、使用者の体の内の凹んでいる部分ではパルス幅データが短い。つまり、叩き用モータ17aの負荷が小さくなっており(低負荷状態)、施療子7の動作速度が、高負荷状態よりも速くなっている。
なお、前記低負荷状態にあるモータの回転速度は、前記高負荷状態にある場合よりも速く、無負荷状態にある場合よりも遅い。そして、前記高負荷状態にあるモータの回転速度は、前記低負荷状態にある場合よりもさらに遅い。
【0029】
制御部10は、パルス幅データを取得すると、この取得の際に叩きフィードバック制御が発生していたか否かについての判定を行い(ステップS3)、発生していた場合(yesの場合)、制御部10は修正処理(ステップS4)を行なう。前記叩きフィードバック制御は、使用者から施療子7に作用する荷重(負荷)が大きく、叩きマッサージ動作が停止してしまうことを回避するために、叩き用モータ17aのPWM制御のパルス幅を調整するフィードバック制御である。つまり、叩きマッサージ動作の際に前記センサ6からのパルス(又は叩き用モータ17aからのパルス)が出力されていないと、制御部10は叩き用モータ17aに対するPWM制御のオン時間を長くし、叩きマッサージ動作の動作速度を上げる制御を自動的に行なう。
【0030】
このようなフィードバック制御が発生すると、叩き用モータ17aの回転速度が急に上昇するため、前記パルス幅A(図5参照)が急に小さくなる。この場合のパルス幅データの値は正確なものであるとはいえない。そこで、前記修正処理(ステップS4)では、値(パルス幅A)が急に小さくなったパルス幅データの前後のパルス幅データの平均値を、フィードバック制御が発生した点のパルス幅データとして置き換える処理を行なう。
【0031】
次に、速度情報取得部21は、取得したパルス幅データの平均処理を行なう(ステップS5)。図8はこの平均処理を説明するフロー図である。記憶部9が記憶している19点のパルス幅データ(図7)のうち、上限側(使用者の首側)からの6点のデータを、速度情報取得部21が取り出す(ステップS51、図8の初期値n=1)。速度情報取得部21は、この6点のうちの最大値と最小値とを除く4点のパルス幅データの平均値を求め(ステップS52)、この平均パルス幅データを記憶部9が記憶する(ステップS53)。
【0032】
このステップS51からステップS53の処理は、全てのデータが処理されるまで繰り返される(ステップS54とステップS55)。つまり、速度情報取得部21は、連続しているパルス幅データの所定数(6点)の内の最大値と最小値とを除く数(4点)を用いて、全てのパルス幅データについての移動平均を求めている。これにより、14点の平均パルス幅データが得られる(図9参照)。
【0033】
そして、制御部10は、前記平均パルス幅データの補正が必要であるか否かの判定を行なう(図6のステップS6)。この判定処理は、施療子を移動させる移動軌道をより滑らかな形状とするためのものであり、補正が必要であると判定されると、制御部10は補正処理を行なう(ステップS7)。
この補正処理は、得られた平均パルス幅データのうち、連続している3点A、B、Cについて、A>BかつC>Bである時、又は、A<BかつC<Bである時、Bについての平均パルス幅データを、その両隣りである平AとCの平均パルス幅データによる平均値として置き換える処理である。
【0034】
以上のように、速度情報取得部21はパルス幅データを取得し、さらに平均パルス幅データを求めていることから、これに対応するように、位置取得部22は、各パルス幅データが取得された際の施療子7の軌道上の位置、及び、この軌道上の位置に基づいて、前記各平均パルス幅データに対応した施療子7の前記軌道における昇降位置を求める処理を行なう(ステップS8)。図10は、この決定処理を説明しているフロー図である。
【0035】
この決定処理では、前半(図10のステップS81からステップS83)において、前記パルス幅データに対応する施療子7の軌道上の位置を求める。つまり、叩きマッサージ動作を開始した際の昇降パルスの数(基準:0、図5参照)と、叩きマッサージ動作を1回終えた際の昇降パルスの数(昇降パルス数=2)との平均値(平均値=1)を求め(ステップS81)、この平均値に基づいて(前記のとおり昇降パルスの数とマッサージユニット5の昇降移動量とは対応関係を有することから)1回目の叩きマッサージ動作をした際に得られたパルス幅データに対応する軌道上の移動位置(これを、昇降位置データという)を求める。そして、この昇降位置データを記憶部9が記憶する(ステップS82)。以下同様にして、各回の叩きマッサージ動作をした際に得られたパルス幅データに対応する昇降位置データを、連続する2点の昇降パルスの数の移動平均から求める(ステップS83)。これにより、19点のパルス幅データに対応して19点の昇降位置データが、位置取得部22によって求められる。
【0036】
また、前記のとおり速度情報取得部21は、19点のパルス幅データを平均処理し、14点の平均パルス幅データを取得していることから、これに対応させるために、位置取得部22は、前記決定処理の後半(図10のステップS84からステップS88)の処理を行なう。記憶部9が記憶している19点の前記昇降位置データのうち、上限側(使用者の首側)からの6点のデータを取り出す(ステップS84、図10の初期値n=1)。そして、この6点の昇降位置データの平均値を求め(ステップS85)、この平均昇降位置データを記憶部9が記憶する(ステップS86)。このステップS84からステップS86の処理は、全てのデータが処理されるまで繰り返される(ステップS87とステップS88)。つまり、位置取得部22は、連続している昇降位置データ(6点)を用いて、全ての昇降位置データについての移動平均を求めている。これにより、14点の平均昇降位置データが、位置取得部22によって得られる。
【0037】
そして、体型検出部23は、速度情報取得部21が求めた14点の平均パルス幅データ(これが速度情報である)と、位置取得部22が求めた14点の平均昇降位置データ(これが昇降位置である)とによって、図9に示しているような速度情報と昇降位置との基礎対応関係を取得する。この基礎対応関係が、使用者の体型(上半身の背面側の凹凸形状)を表現したものであり、これにより、体型検出部23は体型検出が可能となっている。
【0038】
そして、マッサージ動作制御部24は、施療子7の押出し位置の決定処理を行なう(図6のステップS9)。図11はこの決定処理を説明するフロー図である。図12は、決定処理を終えることによって得られる施療子7の前記移動軌道を説明している説明図である。
マッサージ動作制御部24は、記憶部9が記憶している全ての平均パルス幅データ(速度情報)から最大値(つまり、叩きマッサージ動作に要する時間幅が最も長い場合)と、最小値(つまり、叩きマッサージ動作に要する時間幅が最も短い場合)とを抽出する。そして、最大値を、施療子7の「引き込み最大値」と設定し、押し引き動作部18によって施療子7(機械ブロック19)を最も引き込んだ状態とするように設定する。また、最小値を、施療子7の「押し出し最大値」と設定し、押し引き動作部18によって施療子7(機械ブロック19)を最も押し出した状態とするように設定する(ステップS91)。
なお、前記「引き込み最大値」を、押し引き動作部18によって施療子7を最も引き込むことができる機械的な限界値(押し引き動作部18の構造上の限界値)としてもよいが、「引き込み最大値」を、この限界値未満の所定の値とすることができる。
同様に、前記「押し出し最大値」を、押し引き動作部18によって施療子7を最も押し出すことができる機械的な限界値としてもよいが、「押し出し最大値」を、この限界値未満の所定の値とすることができる。この所定の値はマッサージ動作制御部24により決定され、押し出しについての前記所定の値を前記限界値に近づけることで、強いマッサージが可能となる。
【0039】
そして、マッサージ動作制御部24は、残りの平均パルス幅データ(速度情報)に対応する施療子7(機械ブロック19)の押し引き量を、各平均パルス幅データの値に応じて、前記「引き込み最大値」と前記「押し出し最大値」との間の比例配分によって決定し、施療子7(機械ブロック19)の各押し引き量を記憶部9に記憶させる処理を行なう(ステップS92からステップS94まで)。
以上より、マッサージ動作制御部24は、図12に示しているように施療子7の移動軌道を決定することができる。
そして、マッサージ動作制御部24は、昇降機構40、押し引き動作部18に動作制御信号を送信し、施療子7が決定された前記移動軌道に沿って移動するように制御する。そして、この移動軌道に沿って移動する施療子7は、叩き動作部17、揉み動作部16又は押し引き動作部18によって、叩き、揉み又は指圧によるマッサージ動作が行なわれる。
【0040】
以上のように構成されたマッサージ機の動作方法は(このマッサージ機によって実行されるマッサージ方法は)、施療子7の動作速度に関する速度情報を取得すると共に、この速度情報を取得した位置に対応する施療子7の上下方向の前記軌道における昇降位置を求め、この施療子7の各昇降位置に対応した速度情報に基づいて使用者の身体の凹凸形状を求めて体型を検出し、検出した体型に基づいて施療子7(機械ブロック19)の身体に対する押し引き量を変化させながら施療子7(マッサージユニット5)を使用者の身体に沿って上下移動させて、施療子7を揉みや叩きなどのマッサージ動作させることによって行なわれる。
【0041】
このように構成されたマッサージ機によれば、使用者の体型を検出することができ、この体型に応じて施療子7を押し引きしながらマッサージ動作が行なわれるため、身体と施療子7との位置関係が調整されて、体型に応じて適切なマッサージが行なわれる。つまり、背中等の膨らんでいる被施療部に対しては、施療子7を比較的引き込み(後方に移動させ)、施療子7がこのような被施療部に強く当りすぎることを防止することができる。一方、腰等の凹んでいる被施療部に対しては、施療子7を比較的押出し(前方に移動させ)、このような被施療部に対する施療子7の当りが弱くなりすぎることを防止することができる。これにより、適切な強さのマッサージを行なうことが可能となる。
【0042】
また、このマッサージ機の記憶部9にはマッサージプログラムが記憶されており、マッサージプログラムは、所定のマッサージ動作を実行するマッサージコースを有している。
このマッサージプログラムは、コントローラ8の選択ボタンが使用者によって選択されることで、制御部(マッサージ動作制御部24)が実行する。このマッサージプログラムが開始されると、始めに、前記の体型検出が行なわれるようにプログラムされている。これにより、まず、使用者の体型の検出が行なわれ、後のマッサージ動作に反映することができる。
【0043】
また、このマッサージコースは、所定のマッサージ動作を実行するマッサージステップとして、施療子7が叩きマッサージ動作を実行する叩きステップを有している。そして、この叩きステップの実行中に、速度情報取得部21が取得した施療子7の前記速度情報と、位置取得部22が求めた施療子7の前記昇降位置とに基づいて、体型検出部23が使用者の体型を検出することができる。この場合、前記の始めの体型検出を省略することができる。
または、前記の始めの体型検出を行い、さらに、マッサージコース中(叩きステップ中)に体型検出を行なっても良い。この場合、マッサージコース中で検出した体型検出の情報を、始めの体型検出の情報と入れ替えて更新してもよく、または、マッサージコース中で検出した体型検出の情報を、始めの体型検出の情報を部分的に補正するために用いても良い。
【0044】
また、本発明のマッサージ機は、前記のように使用者の上半身の略全体における凹凸形状を検出することができるが、前記制御部10による体型検出によって、身体の部分的な形状を検出することもできる。具体的に説明すると、前記のようにマッサージ動作を実行させながら施療子7を下部である臀部から上部である首部へと移動させる。臀部では、施療子7に作用する荷重が腰部よりも大きく背中よりも小さい中程度であり、叩き用モータ17a等の各モータの負荷が中程度となる。腰部では、施療子7に作用する荷重が臀部よりも小さく、モータの負荷が小となる(又は無負荷となる)。背中部では、施療子7に作用する荷重が臀部及び腰部よりも大きく、モータの負荷が大となる。肩部では、施療子7に作用する荷重が背中部よりも小さい中程度であり、モータの負荷が中程度となる。そして、施療子7が肩部を越えると、施療子7に作用する荷重が肩部よりも小さく、モータの負荷が小となる(又は無負荷となる)。
このように、制御部10は、施療子7が肩部を越えた際の施療子7の動作速度に関する速度情報を取得し、また、この際における施療子7の移動位置を取得することで、これら速度情報と移動位置の情報とに基づいて、肩位置の検出を行なうことができる。さらに、制御部10は、モータの負荷が前記のように大小変化した経過を検出して、施療子7が肩部を越えたことを検出しているため、肩部と、これ以外である腰部等との区別ができる。
【0045】
また、本発明のマッサージ機は、図1に示しているように背凭れ部2を備えており、背凭れ部2は座部1側にある左右水平方向の軸心回りに回動し、リクライニング動作を行なうことができる。背凭れ部2のリクライニング角度(傾斜角度)が変化すると、この背凭れ部2に凭れている使用者の身体に当接している施療子7に作用する荷重も変化する。これにより、叩き用モータ17a等の各モータの負荷が、リクライニング角度に応じて変化する。
また、背凭れ部2がリクライニング動作を行なうと、この背凭れ部2に凭れている使用者の位置がずれることがある。つまり、リクライニング動作が行なわれると、背凭れ部2と使用者の身体との相対位置が変化することがある。
そこで、本発明では、背凭れ部2のリクライニング動作が行なわれると(リクライニング角度が変化すると)、制御部10は前記体型検出と前記肩位置検出との内の一方又は双方を行なうように構成してもよい。すなわち、リクライニング動作が行なわれる度に、制御部10は使用者の体型について再検出を行なうように構成してもよい。
【0046】
さらに、背凭れ部2がリクライニング動作をしていなくても、使用者が体勢を変更した(座り直した)場合も、背凭れ部2と使用者の身体との相対位置が変化することがある。この場合であっても、制御部10は、マッサージコース中(叩きステップ中)に体型検出を再度実行することにより、再検出した体型検出の情報を、始めの(前の)体型検出の情報と入れ替えて更新したり、始めの(前の)体型検出の情報を部分的に補正したりする。
このように、制御部10が体型検出を自動的に変更(更新)するように構成することで、マッサージコース中に使用者の位置が変化しても、適切なマッサージをその後行なうことができる。また、制御部10が自動的に更新することで、使用者がコントローラ8を操作して体型検出をやり直す(肩位置の修正を行なう)手間を省くことができる。
【0047】
また、前記のとおり、制御部10は、図12に示しているように、施療子7の移動軌道を決定し、昇降機構40、押し引き動作部18に動作制御信号を送信し、施療子7が決定された前記移動軌道に沿って移動するように制御する。さらに、この移動軌道に沿って移動する施療子7は、叩き動作部17、揉み動作部16又は押し引き動作部18によって、叩き、揉み又は指圧によるマッサージ動作が行なわれる。
さらに、コントローラ8にはマッサージ動作の強さの調整に関する調整スイッチ(調整ボタン)が設けられており、使用者がコントローラ8を操作してマッサージ強さの調整を行なうと、制御部10(マッサージ動作制御部24)は、前記移動軌道の変更を実行するように構成してもよい。すなわち、制御部10は、図12に示している移動軌道を押し出し側(使用者側)へシフト(移行)させる処理を行なうことで、マッサージ強さを強くすることができる。反対に、移動軌道を引き込み側(反使用者側)へシフト(移行)させる処理を行なうことで、マッサージ強さを弱くすることができる。
なお、この移動軌道のシフトは、全体であってもよく、部分的であってもよい。つまり、移動軌道の全体をシフトさせれば、肩部から腰部にわたる全体に対するマッサージ強さが変更され、移動軌道を部分的にシフトさせれば(例えば肩部や腰部についてのみ移動軌道をシフトさせれば)、当該部分に対してのみマッサージ強さが変更される。
【0048】
または、マッサージ強さの調整のために、制御部10は、図12に示している移動軌道の最大押し出しと最大引き込みとの間の振幅を大小変更するようにして、移動軌道の変更をしてもよい。この場合、押し出し側については、より一層施療子7の押し出し量が増大し、引き込み側については、より一層施療子7の引き込み量が増大し、マッサージ強さにメリハリを付けることができる。
【0049】
また、本発明では、マッサージプログラム(マッサージコース)開始時における体型検出の後に(又は検出の前に)、制御部10は、マッサージ強さの調整を行なう旨を使用者に報知し、コントローラ8からマッサージ強さの調整に関する信号を受けると、前記のように移動軌道の変更を実行し、マッサージを開始してもよい。または、制御部10は、マッサージ強さの変更をマッサージコースの途中で受け付けても良く、そのために、マッサージコースの途中でマッサージ強さの調整を行なう旨を使用者に報知する。なお、前記報知は、コントローラ8の表示部における表示と、音声の発生との一方又は双方により実行することができる。
【0050】
また、本発明のマッサージ機は、図示する形態に限らず本発明の範囲内において他の形態のものであっても良い。前記実施形態では、施療子7の前記速度情報を得るために、1回の叩きマッサージ動作の周期を求めており、このために、叩き軸17bにセンサを設けた場合を説明したが、センサは他の部分に設けてもよい。また、所定のマッサージ動作に要する時間幅を、1回の叩きマッサージ動作に要する時間(1回の叩きマッサージ動作の周期)として説明したが、1回に限らず複数回のマッサージ動作に要する時間としてもよい。また、叩きマッサージ動作以外に、揉みマッサージ動作であってもよい。
【図面の簡単な説明】
【0051】
【図1】本発明のマッサージ機の実施の一形態を示す斜視図である。
【図2】マッサージユニットを前方から見た斜視図である。
【図3】マッサージユニットを後方から見た斜視図である。
【図4】マッサージ機の要部のブロック図である。
【図5】速度情報取得部及び位置取得部の機能を説明する説明図である。
【図6】体型検出を行なうための処理を説明するフロー図である。
【図7】取得したパルス幅データと、施療子の軌道上の位置との関係を示した説明図である。
【図8】平均処理を説明するフロー図である。
【図9】速度情報と昇降位置との基礎対応関係を示した説明図である。
【図10】施療子の昇降位置を求める処理を説明しているフロー図である。
【図11】施療子の押出し位置の決定を行なう処理を説明するフロー図である。
【図12】決定処理を終えることによって得られる施療子の移動軌道を説明している説明図である。
【符号の説明】
【0052】
5 マッサージユニット
7 施療子
17 叩き動作部
17a 叩き用モータ
18 押し引き動作部
21 速度情報取得部
22 位置取得部
23 体型検出部
24 マッサージ動作制御部
40 昇降機構(移動機構)
【特許請求の範囲】
【請求項1】
施療子、モータ及びこのモータの動力を前記施療子に伝達し当該施療子を動作させる動力伝達部を有しているマッサージユニットと、
前記施療子が所定の軌道に沿って移動するように前記マッサージユニットを使用者の身体に沿って移動させる移動機構と、を備え、
使用者の身体に前記施療子が当接することによって前記モータの負荷が変化し当該負荷に応じて当該施療子の動作速度が変化するマッサージ機であって、
前記施療子の前記動作速度に関する速度情報を取得する速度情報取得部と、
前記速度情報を取得した位置に対応する前記施療子の前記所定の軌道における移動位置を取得する位置取得部と、
前記施療子の前記移動位置に対応した前記速度情報に基づいて使用者の身体の凹凸形状を求める体型検出部と、を備えたことを特徴とするマッサージ機。
【請求項2】
前記速度情報取得部は、前記施療子による所定のマッサージ動作に要する時間幅に基づいて、前記速度情報を取得する請求項1に記載のマッサージ機。
【請求項3】
前記所定のマッサージ動作は、使用者側を前方とし前記マッサージユニット側を後方とした前後方向の成分を有する叩きマッサージ動作であり、前記速度情報取得部は、前記施療子による所定回数の前記叩きマッサージ動作に要する時間幅に基づいて、前記速度情報を取得する請求項2に記載のマッサージ機。
【請求項4】
前記施療子を前記使用者の身体に対して押し引きする方向へ移動させる押し引き動作部と、
前記体型検出部によって検出した体型に基づいて前記押し引き動作部により前記施療子の押し引き量を変化させながら前記移動機構により前記マッサージユニットを移動させて、当該施療子にマッサージ動作をさせる制御を行なうマッサージ動作制御部と、を更に備えている請求項1〜3のいずれか一項に記載のマッサージ機。
【請求項5】
前記施療子に所定のマッサージ動作をさせるステップを有するマッサージコースを記憶している記憶部を更に備え、
前記ステップの実行中に前記速度情報取得部が取得した前記施療子の前記速度情報と、前記位置取得部が求めた前記施療子の前記位置とに基づいて、前記体型検出部が使用者の体型を検出する請求項1〜4のいずれか一項に記載のマッサージ機。
【請求項6】
モータの動力が施療子に伝達し当該施療子が動作すると共に、前記施療子が所定の軌道上を移動し、かつ、使用者の身体に前記施療子が当接することによって前記モータの負荷が変化し当該負荷に応じて当該施療子の動作速度が変化するマッサージ機が実行するマッサージ方法であって、
前記施療子の前記動作速度に関する速度情報を取得すると共に、前記速度情報を取得した位置に対応する前記施療子の前記所定の軌道における移動位置を求め、
前記施療子の前記移動位置に対応した前記速度情報に基づいて使用者の身体の凹凸形状を求めて体型を検出し、
検出した体型に基づいて前記施療子の身体に対する押し引き量を変化させながら当該施療子を使用者の身体に沿って移動させて、当該施療子をマッサージ動作させることを特徴とするマッサージ方法。
【請求項1】
施療子、モータ及びこのモータの動力を前記施療子に伝達し当該施療子を動作させる動力伝達部を有しているマッサージユニットと、
前記施療子が所定の軌道に沿って移動するように前記マッサージユニットを使用者の身体に沿って移動させる移動機構と、を備え、
使用者の身体に前記施療子が当接することによって前記モータの負荷が変化し当該負荷に応じて当該施療子の動作速度が変化するマッサージ機であって、
前記施療子の前記動作速度に関する速度情報を取得する速度情報取得部と、
前記速度情報を取得した位置に対応する前記施療子の前記所定の軌道における移動位置を取得する位置取得部と、
前記施療子の前記移動位置に対応した前記速度情報に基づいて使用者の身体の凹凸形状を求める体型検出部と、を備えたことを特徴とするマッサージ機。
【請求項2】
前記速度情報取得部は、前記施療子による所定のマッサージ動作に要する時間幅に基づいて、前記速度情報を取得する請求項1に記載のマッサージ機。
【請求項3】
前記所定のマッサージ動作は、使用者側を前方とし前記マッサージユニット側を後方とした前後方向の成分を有する叩きマッサージ動作であり、前記速度情報取得部は、前記施療子による所定回数の前記叩きマッサージ動作に要する時間幅に基づいて、前記速度情報を取得する請求項2に記載のマッサージ機。
【請求項4】
前記施療子を前記使用者の身体に対して押し引きする方向へ移動させる押し引き動作部と、
前記体型検出部によって検出した体型に基づいて前記押し引き動作部により前記施療子の押し引き量を変化させながら前記移動機構により前記マッサージユニットを移動させて、当該施療子にマッサージ動作をさせる制御を行なうマッサージ動作制御部と、を更に備えている請求項1〜3のいずれか一項に記載のマッサージ機。
【請求項5】
前記施療子に所定のマッサージ動作をさせるステップを有するマッサージコースを記憶している記憶部を更に備え、
前記ステップの実行中に前記速度情報取得部が取得した前記施療子の前記速度情報と、前記位置取得部が求めた前記施療子の前記位置とに基づいて、前記体型検出部が使用者の体型を検出する請求項1〜4のいずれか一項に記載のマッサージ機。
【請求項6】
モータの動力が施療子に伝達し当該施療子が動作すると共に、前記施療子が所定の軌道上を移動し、かつ、使用者の身体に前記施療子が当接することによって前記モータの負荷が変化し当該負荷に応じて当該施療子の動作速度が変化するマッサージ機が実行するマッサージ方法であって、
前記施療子の前記動作速度に関する速度情報を取得すると共に、前記速度情報を取得した位置に対応する前記施療子の前記所定の軌道における移動位置を求め、
前記施療子の前記移動位置に対応した前記速度情報に基づいて使用者の身体の凹凸形状を求めて体型を検出し、
検出した体型に基づいて前記施療子の身体に対する押し引き量を変化させながら当該施療子を使用者の身体に沿って移動させて、当該施療子をマッサージ動作させることを特徴とするマッサージ方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−240478(P2009−240478A)
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願番号】特願2008−89621(P2008−89621)
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]