
マッサージ機及び椅子型マッサージ装置
【課題】一定の押圧刺激を付与する被施療部を挟む対の施療部を共に往復移動させ、効率的に良好なさすりのマッサージを行うことができるマッサージ機、及び椅子型マッサージ装置を提供する。
【解決手段】マッサージ機は、上下に配置されたエアセル23a,23bと、エアセルを上下方向外側から支持する対の支持板22と、支持板22に前後方向の駆動力を与え支持板22を左右両側から支持する対の回動部21と、支持板22の近接離反する方向に対の支持板22を移動自在に支持する対の回動部21に形成されたガイド部25と、対の支持板22を近接する方向に付勢する付勢手段と、回動部21に回動駆動力を与える駆動装置と、を備える。回動部21が回動することにより、エアセルが共に往復移動し、被施療部の上下両側からさすり、また、付勢手段によりエアセルが被施療部を挟みこみ、上下から一定の押圧刺激でさすることができる構成とする。
【解決手段】マッサージ機は、上下に配置されたエアセル23a,23bと、エアセルを上下方向外側から支持する対の支持板22と、支持板22に前後方向の駆動力を与え支持板22を左右両側から支持する対の回動部21と、支持板22の近接離反する方向に対の支持板22を移動自在に支持する対の回動部21に形成されたガイド部25と、対の支持板22を近接する方向に付勢する付勢手段と、回動部21に回動駆動力を与える駆動装置と、を備える。回動部21が回動することにより、エアセルが共に往復移動し、被施療部の上下両側からさすり、また、付勢手段によりエアセルが被施療部を挟みこみ、上下から一定の押圧刺激でさすることができる構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被施療者に対してさすりマッサージを施すことができるマッサージ機、及び椅子型マッサージ装置に関する。
【背景技術】
【0002】
被施療者に対してさすりのマッサージを施すことができるマッサージ機として、従来知られているものに、特許文献1に示しているものがある。
特許文献1に記載されているマッサージ機のフットレストは、被施療部を支持する支持台部と、支持台部と被施療部を挟むために支持台部に対向するように配置された移動部と、を有している。移動部は、被施療部の長さ方向に移動自在となるローラーを有し、支持台部及びローラーは、施療部を構成する空気袋を有している。
そして、特許文献1に記載されているマッサージ機は、支持台部と移動部のローラーに備えられた施療部で被施療部を挟み、この施療部で被施療部に押圧刺激を与える。また、ローラーを被施療部の長さ方向に移動させ、被施療部上を転動させることによって、被施療部の押圧刺激位置が連続的に変化する動作を可能としている。この動作が所謂さすり揉みのマッサージとされている。
【0003】
【特許文献1】特開2004−202207号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているマッサージ機では、施療部を有する支持台部と移動部のローラーのうち、一方のローラー側施療部が被施療部の長さ方向に移動自在であり、他方の支持台部側施療部が固定された構造となっている。
この場合、被施療部の長さ方向にローラーが移動かつ転動することによって、被施療部の押圧刺激位置を連続的に変化させている。これにより、被施療部にさすりのマッサージが施されることになる。すなわち、さすりのマッサージ効果が得られるのはローラー側の被施療部だけであり、支持台部側の被施療部に対してさすりのマッサージを施すには、当該被施療部をローラー側に移動させる、つまり、当該被施療部の向きを変える必要がある。
【0005】
このため、被施療部に対するマッサージの実施回数が増えるので、さすりのマッサージに要する時間が長くなってしまう。
しかも、被施療部が脚の場合、椅子型マッサージ装置に座った状態で脚の向きを変えることが出来ないという問題もある。
【0006】
また、この場合、移動部のローラーは、被施療部の太さに関わらず支持台部と所定の間隔を有して被施療部の長さ方向に移動するので、被施療部の太さによってローラー側施療部の被施療部に付与する押圧刺激の強さが変わることになる。特に、被施療部が脚の場合、脹脛と足首付近の太さが著しく異なるため、当該所定の間隔を脹脛に合わせるとローラー側施療部で足首付近を押圧できなくなり、逆に、当該所定の間隔を足首付近に合わせると脹脛部分ではローラー側施療部の押圧刺激が強過ぎてしまうことになる。
このため、被施療部にマッサージを施したとしても、そのマッサージの効果が得られるのは、被施療部の一部に限られてしまうという問題を有している。
【0007】
そこで、この本発明は、前記問題点に鑑みてなされたものであり、対向配置された施療部が被施療部を両側から挟み、この両施療部を共に往復移動させて効率的にさすりのマッサージを施すことができ、さらに、被施療部全体において、対の施療部が被施療部に常時当接し、押圧刺激を常時付与することで良好なさすりのマッサージ効果を得ることができるマッサージ機、及び椅子型マッサージ装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、第1押圧部材と、前記第1押圧部材との間に被施療部を配置できるように前記第1押圧部材に対して間隔をおいて対向配置された第2押圧部材と、前記両押圧部材を、当該両押圧部材が互いに近接離反する第1方向、及び当該第1方向に対して略直交する第2方向に、移動自在に支持する支持部材と、前記両押圧部材が互いに近接する方向へ、前記両押圧部材を付勢する付勢手段と、前記付勢手段によって付勢された前記両押圧部材を、それぞれ、前記第2方向に往復移動させて、前記両押圧部材によって被施療部へのさすりマッサージを行わせるためのさすり駆動装置と、を備えていることを特徴とする。
【0009】
本発明のマッサージ機によれば、付勢手段により互いに近接する方向に付勢された両押圧部材が被施療部を挟み、被施療部に両側から押圧刺激を付与することができる。
また、付勢手段によって両押圧部材が被施療部に当接されるので、第2方向となる被施療部の長さ方向における両押圧部材の往復移動では、両押圧部材が被施療部の外周面の形状に沿って移動することができる。
この場合、両押圧部材が被施療部に常時当接した状態となり、両押圧部材が押圧刺激を常時付与しながら被施療部の外周面を両側から反復的にさするように動作することができる。
【0010】
上記のマッサージ機において、前記支持部材は、前記押圧部材を支持し、かつ前記押圧部材とともに前記第1方向に移動自在に設けられた第1支持体と、前記駆動装置によって駆動されることで、前記第1支持体を前記第2方向へ移動させるように、前記第1支持体を支持する第2支持体と、を備え、
前記第2支持体は、前記第1支持体を、前記第1方向に移動自在に支持するためのガイド部を有しているのが好ましい。
【0011】
この場合、駆動装置によって駆動された第2支持体が第1支持体及び押圧部材に駆動力を与えるので、押圧部材が第2方向に移動できるようになる。
また、第1支持体は、第2支持体のガイド部で第1方向に移動自在に支持されている、換言すれば、第1支持体がガイド部によって移動範囲を規制されている。
すなわち、第1支持体に支持された第1押圧部材及び第2押圧部材が互いに近接離反し過ぎることを防止できる。これによって、両押圧部材の互いの近接し過ぎによる被施療部への押圧刺激が強過ぎたり、若しくは、両押圧部材の互いの離反し過ぎによる被施療部への押圧ができなくなるようなことがない。
【0012】
また、上記のマッサージ機において、前記支持部材は、前記第1押圧部材と前記第2押圧部材との対向間隔を調整自在に構成されているのが好ましい。
この場合、被施療部の太さに対して両押圧部材の対向間隔を調整することができるので、被施療部の太さに関わらずに効果的なさすりマッサージを施すことができる。
【0013】
また、上記のマッサージ機において、前記両押圧部材が互いに近接離反する前記第1方向を変化させるための押圧方向調整部を有しているのが好ましい。
この場合、第1方向を変化させる、つまり、被施療部の周方向において被施療部を挟む両押圧部材の位置を変えることができるので、被施療部の周方向の広い範囲にさすりマッサージを施すことができる。
【0014】
また、上記のマッサージ機において、前記押圧方向調整部は、前記第1方向を変化させるための駆動力を発生する押圧方向調整駆動部と前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記押圧方向調整駆動部を動作させて前記第1方向を変化させる制御部と、をさらに備えているのが好ましい。
この場合、両押圧部材を第2方向に往復移動させ、被施療部に対しさすりマッサージを施している状態で、さらに、被施療部の周方向において被施療部を挟む両押圧部材の位置を変えることができる。これによって、被施療部の周方向の広い範囲に対し連続してさすりマッサージを施すことができる。
【0015】
また、上記のマッサージ機において、前記両押圧部材が前記さすり駆動装置によって前記第2方向へ往復移動するさすり範囲を、前記第2方向へ位置変更するためのさすり範囲調整部を備えているのが好ましい。
この場合、さすり範囲を第2方向へ位置変更する、つまり、被施療部の長さ方向において被施療部を挟む両押圧部材の位置を変えることができるので、被施療部の長さ方向の広い範囲にさすりマッサージを施すことができる。
【0016】
また、上記のマッサージ機において、前記さすり範囲調整部は、前記第2方向へ前記さすり範囲を位置変更させるための駆動力を発生する位置変更用駆動部と、前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記位置変更用駆動部を動作させて前記さすり範囲の位置を第2方向に変化させる制御部と、をさらに備えているのが好ましい。
この場合、両押圧部材を第2方向に往復移動させ、被施療部に対しさすりマッサージを施している状態で、若しくは、両押圧部材を第2方向に往復移動させ、かつ、被施療部の周方向において被施療部を挟む両押圧部材の位置を変えながら被施療部に対しさすりマッサージを施している状態で、さらに、被施療部の長さ方向において被施療部を挟む両押圧部材の位置を変えることができる。これによって、被施療部の周方向の広い範囲に対し、若しくは、被施療部の周方向及び長さ方向の広い範囲に対し、連続してさすりマッサージを施すことができる。
【0017】
また、上記のマッサージ機において、前記両押圧部材が互いに近接離反する前記第1方向を変化させるための駆動力を発生する押圧方向調整駆動部と、前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記押圧方向調整部を動作させて前記第1方向を変化させる制御部と、を備える押圧方向調整部と、前記両押圧部材が前記さすり駆動装置によって前記第2方向へ往復移動するさすり範囲を、前記第2方向へ位置変更するための駆動力を発生する位置変更用駆動部と、前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記位置変更用駆動部を動作させて前記さすり範囲の位置を第2方向に変化させる制御部と、を備えるさすり範囲調整部と、を有しているのが好ましい。
この場合、両押圧部材を第2方向に往復移動させ、被施療部に対しさすりマッサージを施している状態で、被施療部の周方向において被施療部を挟む両押圧部材の位置を変えることができ、さらに、被施療部の長さ方向において被施療部を挟む両押圧部材の位置を変えることができる。これによって、被施療部の周方向及び長さ方向の広い範囲に対し連続してさすりマッサージを施すことができる。
【発明の効果】
【0018】
以上の通り、本発明によれば、対向配置された押圧部材が被施療部を両側から挟み、この両押圧部材を共に往復移動させることができるので、効率的にさすりのマッサージを施すことができるとともに、両押圧部材が被施療部に常時当接し、押圧刺激を常時付与しながらさすることができるので、良好なさすりのマッサージ効果を得ることができる。
【発明を実施するための最良の形態】
【0019】
以下、図面に基づいて本発明の実施の形態を説明する。
図1乃至図7は、本発明に係るマッサージ機の第1実施形態を示している。
図1は、第1実施形態に係るマッサージ機を具備した椅子型マッサージ装置1の斜視図である。この椅子型マッサージ装置1は、座部2と、座部2の後部に配置された背もたれ部3と、座部の前部に配置された脚載部4と、座部2の左右両側に配置された肘掛け部5と、を備えている。
なお、本実施形態において、図1の状態にある背もたれ部3の高さ方向を上下方向、奥行き方向を前後方向といい、さらに、前方から見た背もたれ部3の幅方向を左右方向という。
【0020】
背もたれ部3は、後方へのリクライニングが可能(回動可能)となるように座部2に取り付けられている。
脚載部4は、座部2に回動可能に取り付けられて、図1の下方垂れ下がり状態から図示しない前方突出状態となることができる。
背もたれ部3を後方に倒し、脚載部4を上昇させると、背もたれ部3から脚載部4までの範囲が略フラットになり、被施療者は仰臥状態をとることができる。
この場合、座部2、背もたれ部3、脚載部4のいずれか又は全部には、施療部(図示省略)が配置されており、着座状態又は仰臥状態の被施療者にマッサージを施すことができる。施療部としては、モータによって駆動される揉み玉や、空気の給排によって膨張収縮するエアセルなど様々なものを採用できる。
【0021】
また、脚載部4は、下方端部を前方に突出させた左右の足底を支持する足底部4aと、左右の両脚を支持する脚載本体部4bと、後部に配置された上下方向のガイドレール4cと、を有している。
脚載本体部4bには、後述する左右の脚用マッサージ機6が取り付けられている。
【0022】
肘掛け部5は、その後部が背もたれ部3の左右側面に取り付けられており、座部2の左右両側方位置において前方に延設されている。
また、肘掛け部5は、腕を支持する肘掛本体部5aと、後部に設けられた左右方向の軸5bと、下部に配置された前後方向のガイドレール5cと、を有している。
左右の肘掛本体部5aには、後述する腕用マッサージ機7がそれぞれ取り付けられている。
軸5bは、背もたれ部3内部において背もたれ部としての骨格をなす背もたれフレーム(図示省略)に対して枢着されているので、肘掛け部5が軸5bまわりに回動自在となる。これによって、肘掛け部5は、図1のようにその前部が略前方を向いた状態や、図示しないが、その前部が上方に向くように後方に回動して起き上がった状態をとることができる。
【0023】
つまり、肘掛け部5が邪魔な場合や、被施療者が座部2の側方から着座又は離座したい場合には、肘掛け部5を回動させることで、座部2の側方に肘掛け部5が存在しない状態にすることができるので、被施療者は楽に側方から着座又は離座を行うことができる。
【0024】
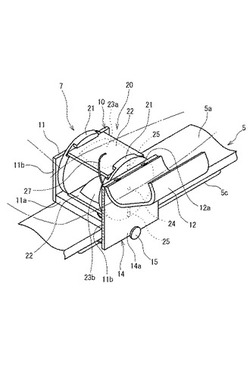
図2乃至図4は、肘掛本体部5aに取り付けられた右腕の腕用マッサージ機7を示している。
この腕用マッサージ機7は、前後方向が開口する外枠体10と、さすりマッサージの動作のためのマッサージ機構20と、を備えている。
外枠体10は、マッサージ機構20を収容する上部及び前後方向を開口した収容部11と、収容部11及び収容されたマッサージ機構20の上方を覆うカバー部12と、肘掛け部5に取り付けるための取付部14と、を有している。
【0025】
収容部11は、肘掛本体部5aに設置される底部11aと、底部11aの左右両端から上方に突出する左右両側部11bと、を有している。
底部11aは、その内部に空間を有し、左右両側部11bは、それぞれの内部に空間を有しており、底部11aの内部空間に左右両側部11bの内部空間が連続している。
この連続する底部11aの内部空間と左右両側部11bの内部空間が、後述するマッサージ機構20に駆動力を与えるための駆動装置28を収容する駆動室13を構成している(図3、図4参照)。
また、左右両側部11bの内部空間内には、軸受からなる支持部11cが設けられている。マッサージ機構20は、左右の支持部11cに支持され、底部11aと左右両側部11bに囲まれた内側に収容されている。
【0026】
カバー部12は、収容部11の左側部の上面に蝶番12aによって接続され、カバー部12を閉じる場合には、止め具(図示省略)によって収容部11に固定される。
取付部14は、底部11aの左側端部から下方に突出する側部14aと、側部14aの下端部の前後方向中央から左右方向中央へ向けて延びるガイド部17と、ガイド部17を肘掛け部5に固定するための固定具15と、を備えている。
ガイド部17は、ガイド孔17aを有し、ガイド孔17aに肘掛け部5のガイドレール5cが摺動自在に挿通されている。このため、ガイド部17がガイドレール5cに沿って前後方向に移動自在になる。これによって、外枠体10を肘掛け部5の前後方向に移動させることができる。
また、ガイド部17は、固定具15によってガイドレール5cに固定される。
【0027】
次に、マッサージ機構20について説明すると、マッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備えている。
【0028】
対のエアセル23は、被施療部となる腕を上方から押圧する第1エアセル(第1押圧部材)23aと、腕を下方から押圧する第2エアセル(第2押圧部材)23bと、を有している。
エアセル23a,23bは、それぞれ空気を給排するための空気配管27を有し、各空気配管27は、後述する支持板22の孔部22bに挿通され、外枠体10の駆動室13を経由して、肘掛け部5の下方に引き回され(図示省略)、座部2の下方に配置された空気給排装置36(図7参照)に接続されている。
この場合、エアセル23a,23bに供給する空気の量によって、腕に与える押圧刺激の強さを変えることができる。
【0029】
各支持板22は、それぞれ前後方向中央部の左右両側面を突出させた左右の軸部22aと、上下を貫通した孔部22bと、を有している。
各軸部22aは、それぞれ回動部21のガイド部25に支持され、かつ、回動部21より前後方向の駆動力を与えられる。これによって、各支持板22が前後方向に往復移動する。
この場合、各支持板22は、その前後方向において、一点で支持されているため、各支持板22の前後方向の端部が傾動自在になる。
各孔部22bには、各支持板22の対向する面で支持するエアセル23の空気配管27が挿通され、空気配管27を前述の空気給排装置36(図7参照)に接続するために各支持板22の他方の面側に導いている。
【0030】
各回動部21は、それぞれ円形の板部材からなり、互いに対向する内側の面において、付勢手段26及びガイド部25と、各支持板22の往復移動における上下動を規制する前後方向に形成された所定幅の規制溝21aと、を有している。
規制溝21aは、図3に破線で示されており、各回動部21の上部と下部に形成されている。
この場合、各支持板22の前後方向の往復移動において、各支持板22の上下方向の移動が規制溝21aの幅範囲内に規制されることになる。これによって、各支持板22が水平方向に対して必要以上に傾き、腕に対して強い押圧刺激を与えること防止することができる。
【0031】
ガイド部25は、回動部21の径方向かつ上下方向の溝を有し、この溝が回動部21の上部と下部とに形成されている。ガイド部25の溝には、各支持板22の軸部22aが収容され、当該溝の長さ寸法の範囲内で各支持板22が互いに近接する方向、つまり、上下方向に移動自在に支持されている。
また、ガイド部25によって、軸部22aが所定範囲を超えて上下方向を移動することを規制している。つまり、ガイド部25の溝の壁面がストッパーとなり、軸部22aがガイド部25の溝の壁面を超えて移動することを防止している。これによって、各支持板22が近接し過ぎて、エアセル23a,23bの腕への押圧刺激が強過ぎたり、若しくは、各支持板22が離反し過ぎて、エアセル23a,23bが腕に対して押圧できなくなるようなことがなくなる。
【0032】
さらに、各回動部21の回動により、ガイド部25の溝の壁面が軸部22aに対して前後方向の押圧力を与える。つまり、各支持板22を前後方向に往復移動させるための駆動力が軸部22aに与えられる。
このとき、ガイド部25に対して上下方向に所定の範囲で軸部22aが移動自在になるので、各回動部21の回動による円運動の軌跡を、各支持板22の直線運動の軌跡ないしは被施療部となる腕の外周面に沿った軌跡に変換できる。
すなわち、各回動部21の回動を各支持板22の前後方向の往復移動に変換する際、各支持板22の上下方向の移動を吸収することができる。
【0033】
付勢手段26は、バネからなり、図4に示すように、各回動部21の頂点部と底点部にそれぞれ設けられている。そして、各回動部21の頂点部に設けられた各付勢手段26が上側の支持板22の上面の前後方向中央部分における左右両端部に取り付けられ、各回動部21の底点部に設けられた各付勢手段26が下側の支持板22の下面の前後方向中央部分における左右両端部に取り付けられている。
この場合、各付勢手段26による付勢力は、被施療部となる腕の太さに対応して各支持板22及びエアセル23a,23bが互いに近接離反できる程度のものとされている。
このため、各付勢手段26によって各支持板22が互いに近接する方向に付勢され、つまり、エアセル23a,23bが腕に向かって上下方向に付勢され、各支持板22及びエアセル23a,23bの対向間隔が腕の太さに合わせて調整されることになる。
また、このバネからなる各付勢手段26で各支持板22及びエアセル23a,23bが上下方向外側への移動も自在になるので、腕の太さに関わらず腕の外周面に沿った往復移動が行える。これによって、エアセル23a,23bが腕に常時当接し、一定の押圧刺激を常時付与することができる。
【0034】
回動軸24は、その一方端を回動部21の円形の中心部に固着され、他方端が収容部11の支持部11cに回動自在に支持されている。
駆動装置28は、正逆方向の回転駆動力を有するモータ29と、モータ29の左右両端部から突出するモータ軸29aと、モータ軸29aの回転動を伝達するためのベルト29bと、を備えている。
ベルト29bが左右のモータ軸29aと回動軸24にそれぞれ巻き掛けられている。
モータ29の正逆方向の回転駆動力が回動軸24及び各回動部21を正逆回動させ、さらに、各支持板22及びエアセル23a,23bを往復移動させる。
【0035】
図5は、腕用マッサージ機7のさすりのマッサージ動作を示している。
図5(a)は、矢印Xで示すように、各回動部21の上部が後方側に回転した状態である。
この場合、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、エアセル23aが後方に、エアセル23bが前方に、それぞれ腕の外周面に沿って移動している。
図5(b)は、矢印Xで示すように、各回動部21の上部が前方側に回転した状態である。
この場合も、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、エアセル23aが前方に、エアセル23bが後方に、それぞれ腕の外周面に沿って移動している。
【0036】
しかも、図5(a)の状態から図5(b)の状態への移動では、エアセル23aは、後方への移動から前方への移動と移動方向を変え、エアセル23bは、前方への移動から後方への移動へと移動方向を変え、それぞれ前後方向に往復移動を行っている。
この場合、エアセル23a,23bは、付勢手段26(図示省略)に付勢されたままの状態になるので、腕に常時当接し、一定の押圧刺激を常時付与しながら往復移動をする。
このようにして、腕の外周面がエアセル23a,23bによってさすられることになる。
さらに、この往復移動を繰り返すことによって、さすりのマッサージ動作になる。
【0037】
上記の図2乃至図5では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
【0038】
図6は、座部2に対して前方突出状態(水平状態)としたとなる脚載本体部4bに取り付けられた右脚の脚用マッサージ機6を示している。
なお、下記は脚載本体部4bを前方突出状態とした場合を基準に説明する。
この脚用マッサージ機6のマッサージ機構20は、左右方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を左右方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を上下両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26(図示省略)と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28(図示省略)と、を備えている。
【0039】
すなわち、図2に示す腕用マッサージ機7のマッサージ機構20は、腕を上下方向から挟みこむエアセル23a,23bを有し、腕の上下両側からさすりのマッサージを施すのに対して、図6に示す脚用マッサージ機6のマッサージ機構20は、脚を左右方向から挟みこむエアセル23a,23bを有し、脚の左右両側からさすりのマッサージを施すことになる。脚は前後方向へ開口している開口部から挿入する。
マッサージ機構20のその他の点については、図2に示す腕用マッサージ機7と異なるところはないので、詳細な説明は省略する。
【0040】
また、脚用マッサージ機6の外枠体10は、マッサージ機構20を収容する前後方向を開口した収容部11と、収容部11及び収容されたマッサージ機構20を覆うカバー部12と、脚載部4に取り付けるための取付部14と、を有している。
収容部11は、脚載本体部4bに設置される底部11aと、前方から見て(図6に示す矢印Vの方向から見て)、底部11aの左側端部から上方に突出する側部11bと、側部11bの上端部から右側に延びる上部11dと、を有している。
底部11aの右側端部及び上部11dの右側端部には、カバー部12が接続されている。
また、底部11aと側部11bと上部11dとは、それぞれの内部に空間を有しており、底部11aと側部11bと上部11dとのそれぞれの内部空間が連続している。
【0041】
そして、この連続する底部11aの内部空間と側部11bの内部空間と上部11d内部空間がマッサージ機構20に駆動力を与えるための駆動装置28を収容する駆動室13(図示省略)を構成している。
また、底部11aと上部11dの内部空間内には、軸受からなる支持部11c(図示省略)が設けられている。マッサージ機構20は、上下の支持部11cに支持され、底部11aと側部11bと上部11dとに囲まれた内側に収容されている。
【0042】
取付部14は、底部11aの左側端部から下方に突出する側部14aと、側部14aの下端部の前後方向中央から右側に延びるガイド部17(図示省略)と、ガイド部17(図示省略)を脚載部4に固定するための固定具15と、を備えている。
ガイド部17(図示省略)は、ガイド孔17a(図示省略)を有し、ガイド孔17aに脚載部4のガイドレール4cが摺動自在に挿通されている。このため、ガイド部17(図示省略)がガイドレール4cに沿って前後方向に移動自在になる。これによって、外枠体10を脚載部4の前後方向に移動させることができる。
【0043】
すなわち、図2に示す腕用マッサージ機7の外枠体10は、駆動装置28を収容する駆動室13が底部11aと左右両側部11bとに設けられ、各支持板22及びエアセル23a,23bに左右両側から駆動力を与える構造を有しているのに対して、図6に示す脚用マッサージ機6の外枠体10は、駆動装置28を収容する駆動室13が底部11aと側部11bと上部11dとに設けられ、各支持板22及びエアセル23a,23bに上下両側から駆動力を与える構造を有していることになる。
外枠体10のその他の点については、図2に示す腕用マッサージ機7と異なるところはないので、詳細な説明は省略する。
【0044】
上記の図6では、右脚の脚用マッサージ機6について説明したが、左脚の脚用マッサージ機6は、右脚の脚用マッサージ機6と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
【0045】
図7は、脚用マッサージ機6及び腕用マッサージ機7において設けられる制御回路30の一例である。図7に示すように、制御回路30は、制御部31と、リモコン32と、駆動装置28と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、から構成されている。
電磁弁35は、左右の脚用マッサージ機6と、左右の腕用マッサージ機7の有するエアセル23a,23bに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0046】
以上のように、第1実施形態に係るマッサージ機では、対向配置された対のエアセルが被施療部を上下方向若しくは左右方向から挟みこみ、この対のエアセルを共に往復移動させることができる。これによって、被施療部の上下若しくは左右両側からさすることができるようになるので、効率的にさすりのマッサージを施すことができる。
また、伸縮自在な付勢手段によって対のエアセルが被施療部を上下方向若しくは左右方向から挟みこみ、被施療部に常時当接することができる。これにより、対のエアセルが上下若しくは左右両側から被施療部を一定の押圧刺激で常時さすることができるので、被施療者は、良好なさすりのマッサージ効果を得ることができる。
しかも、付勢手段は、マッサージ機を使用するときに対のエアセルを互いに近接させるので、マッサージ機を使用していない状態における対のエアセルの対向間隔は、付勢手段を備えていない場合に比べて、広く設定することができる。
これによって、マッサージ機を使用する際、対のエアセルの間に被施療部を挿入する又は引き抜くことが容易にできるようになる。
【0047】
図8乃至図11は、本発明に係るマッサージ機の第2実施形態を示している。
図8乃至図11に示す右腕の腕用マッサージ機7は、対の支持板の対向間隔を調整する機構など上述のマッサージ機構20とは異なるリンク機構を有するマッサージ機構40を備えている。
【0048】
このマッサージ機構40は、上下方向に所定の間隔で対向に配置された対の施療子43と、対の施療子43を上下方向外側から支持する対の支持板(第1支持体)42と、対の支持板42の対向間隔を調整するための間隔調整部48と、対の支持板42に前後方向(第2方向)の駆動力を与え支持板42を左右両側から支持する対の回動部(第2支持体)41と、対の支持板42の互いに近接離反する方向(第1方向)に対の支持板42を移動自在に支持するために対の回動部41に形成されたガイド部45と、対の施療子43を互いに近接する方向に付勢するため対の支持板42に支持された付勢手段46と、対の支持板42を一定間隔で往復移動させるために対の回動部41の左右外側に設けられた移動規制部47と、対の回動部41に設けられた回動軸44と、回動軸44に回動駆動力を与えるための駆動装置28と、を備えている。
【0049】
各施療子43は、それぞれ弾力性を有する板状部材から構成され、被施療部となる腕を上方から押圧する施療子(第1押圧部材)43aと、腕を下方から押圧する施療子(第2押圧部材)43bと、を有している。
施療子43a,43bが腕を上下方向から挟みこんだ場合、腕からの反作用によって、各施療子43の互いに対向する面が弾性変形される。このように、各施療子43を腕の外周面に沿って当接させることができる。
【0050】
各支持板42は、それぞれ、間隔調整部48を収容するために後方内部に形成された収容部42a(図10参照)と、収容部42aの上部を所定の長さで開口させた開口部42b(図10参照)と、左右両側面から収容部42aに向けて貫通させた左右の貫通孔(図示省略)と、収容部42aの中心部に設けられた仕切板42c(図10参照)と、前方部において上下面を貫通させた長方形の角孔42d(図11参照)と、支持板42の角孔42d側の内面の左右両端に形成された付勢手段46を支持するための支持凹部42e(図11参照)と、往復移動における上下動を規制するために前方部の左右両端部から突出させた規制軸42f(図11参照)と、を備えている。
【0051】
間隔調整部48は、図10に示すように、左右の各軸部48aと、軸部48aの一方の端部を上方に突出させたつまみ48bと、軸部48aを左右方向に付勢するためのバネ48cと、を有している。
各軸部48aは、一方端となるつまみ48bを互いに対向させる状態で収容部42aに収容され、各軸部48aと仕切板42cとの間にはバネ48cが配置されている。
また、各軸部48aの他方端が支持板42の左右両側面の前記貫通孔に挿通されている。さらに、つまみ48bの上部が収容部42aの開口部42bから突出している。
【0052】
この場合、バネ48cが各軸部48aを左右方向外側に付勢するので、各軸部48aの前記他方端が支持板42の前記貫通孔から外側に突出されて、各回動部41のガイド部45に収容される。
また、各軸部48aのつまみ48bを互いに近接させ、バネ48cを収縮させることによって、各軸部48aの前記他方端が内側に引き戻されるので、各軸部48aの前記他方端が各回動部41のガイド部45から引き出される。
【0053】
各回動部41は、それぞれ長板状の部材からなり、互いに対向する内側の面において、ガイド部45を有している。
ガイド部45は、図10に示すように、回動部41の長さ方向に複数の間隔調整軸受45aを有しており、各回動部41の間隔調整軸受45aに間隔調整部48の各軸部48aの先端部が収容されている。
この場合、間隔調整軸受45aは、後述する移動規制部47の有する複数の規制溝47aに対応して設けられている。間隔調整軸受45aの選択では、被施療部となる腕の太さに合わせて規制溝47aが選択され、その選択によって、間隔調整軸受45aが決定されることになる。
【0054】
さらに、各回動部41の回動により、各間隔調整軸受45aが各軸部48aに対して前後方向の押圧力を与える。つまり、各支持板42がガイド部45から前後方向に往復移動するための駆動力を与えられる。
【0055】
付勢手段46は、図11に示すように、略長方形の箱型からなる外枠部46aと、外枠部46aに収容され施療子43を付勢するための1つ以上のバネ46bと、施療子43を支持する支持部46cと、を有している。
先ず、上側の支持板42に支持される付勢手段46について詳しく説明する
外枠部46aは、上板部の左右両端部に左右方向に突出する軸部46dと、下板部に開口部46eと、を有している。
外枠部46aの上板部が角孔42dに挿入され、軸部46dが角孔42dの左右両側に位置する支持凹部42eに枢着されている。これによって、外枠部46aが角孔42d内の所定の範囲内で回動できるので、被施療部となる腕の前後方向の外周面に沿って施療子43の当接面の向きを変えることができる。
【0056】
外枠部46aの上板部の内側には、バネ46bの一方端が固定され、他方端が支持部46cの上面部に取り付けられている。
支持部46cは、板状部材からなり、上部に鍔部を有し、この鍔部が外枠部46aに収容され、下部が開口部46eから突出されている。
この場合、前記鍔部を有する上部は、開口部46eよりも大きい面積を有しており、開口部46eでは、前記鍔部を有する上部が外枠部46aに係止されるので、支持部46cがバネ46bの付勢力によって外枠部46aから抜け落ちることはない。
また、被施療部となる腕の太さに合わせてバネ46bが伸縮し、支持部46cがバネ46bに付勢され、支持部46cに支持された施療子43が腕の外周面に当接される。
【0057】
次に、下側の支持板42に支持される付勢手段46について説明する。
基本的には、上側の支持板42に支持された付勢手段46と比べると、上下方向の向きが異なる以外は同じ構造となっている。
このようにして、各付勢手段46により各施療子43が上下方向から中心に向かって付勢されるので、各施療子43の対向間隔が腕の太さに合わせて調整されることになる。また、このバネからなる各付勢手段46で各施療子43が上下方向外側への移動も自在になるので、腕の太さに関わらず腕の外周面に沿った往復移動が行える。これによって、各施療子43が腕に対して常時当接し、一定の押圧刺激を常時付与することができる。
【0058】
移動規制部47は、各支持板42を前後方向に移動させる上下方向に複数の規制溝47aを有し、規制溝47aに支持板42の左右の規制軸42fの先端部が収容され、左右の規制軸42fが前後方向に摺動自在に支持されている。
また、被施療部となる腕の太さに合わせて、規制溝47aを選択することができ、これによって、各支持板42の対向間隔を調整することができる。
【0059】
また、規制溝47aが規制軸42fの上下方向の移動を規制するので、ガイド部45から離れた各支持板42の前方部が近接し過ぎて、施療子43a,43bの腕への押圧刺激が強過ぎたり、若しくは、各支持板42の前方部が離反し過ぎて、施療子43a,43bが腕に対して押圧できなくなるようなことがなくなる。
なお、移動規制部47の前後上下方向の中央部には、回動軸44を隙間を有して挿通するための貫通孔が設けられている。
【0060】
回動軸44は、その一方端を回動部41の中心部に固着され、他方端が収容部11の支持部11cに回動自在に支持されている。
そして、駆動装置28のモータ29の正逆方向の回転駆動力が各回動軸44及び各回動部41を回動させ、さらに、各支持板42及び各施療子43を往復移動させる。
駆動装置28のその他の点については、図2乃至図5の腕用マッサージ機7と異なるところはないので、詳細な説明は省略する。
【0061】
図12は、第2実施形態に係る腕用マッサージ機7のさすりのマッサージ動作を示している。
図12(a)は、矢印Xで示すように、各回動部41が後方側に回転した状態である。
この場合、付勢手段46によって、施療子43a,43bが上下方向から腕を挟みこみ、また、施療子43a,43bが腕の外周面に沿って当接されている。このとき、施療子43a,43bの当接された範囲において一定の押圧刺激が腕に与えられている。
図12(b)は、矢印Xで示すように、各回動部41が前方側に回転した状態である。
この場合も、付勢手段46によって、施療子43a,43bが上下方向から腕を挟みこみ、また、施療子43a,43bが腕の外周面に沿って当接されている。そして、施療子43a,43bの当接された範囲において一定の押圧刺激が腕に与えられている。
【0062】
しかも、図12(a)の状態から図12(b)の状態への移動において、施療子43a,43bは、付勢手段46に付勢されたままの状態で腕の外周面に沿って移動をする、言い換えると、施療子43a,43bが腕に常時当接し、一定の押圧刺激を常時付与しながら移動をする。
このようにして、施療子43a,43bによって腕の外周面がさすられることになる。
さらに、この移動を繰り返すことによって、さすりのマッサージ動作となる。
【0063】
図13及び図14は、各施療子43の対向間隔を調整するための手順を説明する説明図である。
この図13及び図14を参照しつつ、第2実施形態に係る腕用マッサージ機7の対の施療子43の対向間隔を調整するための手順を説明する。
【0064】
まず、図13(a)に示すように、腕用マッサージ機7のカバー部12を開けた状態にする。そして、左右各軸部48aの各つまみ48bを指で摘まんで、各つまみ48bを互いに近接させ、支持板42から外側に突出した各軸部48aの先端部を内側に引き戻す。
これによって、各軸部48aの前記先端部が各回動部41のガイド部45の間隔調整軸受45aから引き出され、支持板42が前後方向に移動自在になり、支持板42の取り外しができる。
【0065】
次に、図13(b)の状態から、図14(a)に示すように、各つまみ48b(図示省略)を指で摘まんだまま支持板42を前方向に移動させる。
そして、図14(b)に示すように、支持板42の規制軸42fを支持する移動規制部47の規制溝47aを変えて、支持板42を前方向から後方に移動させる。このとき、各つまみ48b(図示省略)を指で摘まんだまま支持板42を移動させ、選択した規制溝47aに対応するガイド部45の間隔調整軸受45aの位置で各つまみ48b(図示省略)を放し、各軸部48aの前記先端部をガイド部45の間隔調整軸受45aに収容する。これによって、支持板42が各回動部41に取り付けられる。
【0066】
このようにして、被施療部となる腕の太さに合わせて、各施療子43の対向間隔を調整することができる。
また、図13及び図14では、各施療子43のうち上側の施療子43aのみを移動させて当該対向間隔を調整する方法について説明しているが、下側の施療子43bを移動させて当該対向間隔を調整することもできる。
この場合、上側の施療子43aを一度取り外してから、下側の施療子43bを上記手順と同じ方法で移動させることになる。その他の点については、異なるところはないので詳細な説明は省略する。
【0067】
各施療子43の対向間隔を調整するこの手順によれば、移動規制部47の規制溝47a及びガイド部45の間隔調整軸受45aを変えるだけで良いので、簡単な構造で各施療子43の対向間隔を調整することができる。
しかも、支持板42の取り外し、取り付けが片手で容易に行えるので、取扱いがし易いという利点もある。
【0068】
上記の図8乃至図14では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、右腕の腕用マッサージ機7が腕を上下方向から挟みこむ施療子43a,43bを有しているのに対し、左右の脚用マッサージ機6では、脚を左右方向から挟みこむ施療子43a,43bを有し、脚の左右両側からさすりのマッサージを施すことになる点と、これに伴い上下両側から駆動力を与える構造を有している点と、が異なる。
その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0069】
図15は、第2実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図15に示すように、制御回路30は、制御部31と、リモコン32と、駆動装置28と、から構成されている。
【0070】
以上のように、第2実施形態に係る腕用マッサージ機では、対向配置された対の施療子が被施療部を上下方向から挟みこみ、この対の施療子を共に往復移動させることができる。これによって、被施療部の上下両側からさすることができるので、効率的にさすりのマッサージを施すことができる。
また、伸縮自在な付勢手段によって対の施療子が被施療部を上下方向から挟みこみ、被施療部に常時当接することができる。これにより、対の施療子が上下両側から被施療部を一定の押圧刺激で常時さすることができるので、被施療者は、良好なさすりのマッサージ効果を得ることができる。
さらに、被施療部を上下方向から挟みこむ対の施療子の対向間隔を調整することができ、被施療部となる腕の太さに関わらず対の施療子が一定の押圧刺激でさすることができる。このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
【0071】
図16乃至図19は、本発明に係るマッサージ機の第3実施形態を示している。
図16乃至図19に示す右腕の腕用マッサージ機7は、上述のマッサージ機構20と、マッサージ機構20を被施療部となる腕の周方向に回動させる(第1方向を変化させる)ギア機構を有する押圧方向調整部70と、被施療部となる腕の周方向に回動可能にするためにマッサージ機構20と押圧方向調整部70とを収容する外枠体60と、を備えている。
【0072】
先ず、外枠体60について説明すると、外枠体60は、マッサージ機構20を収容する上部及び前後方向を開口した収容部61と、収容部61及び収容されたマッサージ機構20の上方を覆うカバー部62と、押圧方向調整部70を収容し肘掛け部5に取り付けるための取付部64と、を有している。
【0073】
収容部61は、底部61aと、底部61aの左右両端から上方に突出する左右両側部61bと、を有している。
この底部61aと左右両側部61bの連続する外周面は、前方から見て、下方を円弧とする半円形状を有し、さらに、この半円形状の中心部分に矩形の凹部形状を有している。この矩形の凹部形状は、底部61aと左右両側部61bに囲まれた部分を示している。
つまり、収容部61は、前後方向の半円柱形状からなり、この半円柱形状の半円の中心部分に凹部を有し、この凹部が前後方向を開口している。
【0074】
また、底部61aは、前記凹部の下部に直方体の横の内部空間を有し、左右両側部61bは、前記凹部の左右両側にそれぞれ直方体の縦の内部空間を有しており、底部61aの内部空間に左右両側部61bの内部空間が連続している。
この連続する底部61aの内部空間と左右両側部61bの内部空間が、マッサージ機構20に駆動力を与えるための駆動装置28を収容する駆動室63を構成している。
左右両側部61bの内部空間内には、軸受からなる支持部61cが設けられている。マッサージ機構20は、左右の支持部61cに支持され、底部61aと左右両側部61bに囲まれた内側に収容されている。
【0075】
また、収容部61の外周部には、周方向の帯状の空間を有する移動規制領域65が設けられている。
移動規制領域65は、図18に示すように、収容部61の前後方向中央部の外周部において、左側端部付近から取付部64の右側端部と対向する位置付近に亘って形成されている。また、移動規制領域65は、図17で示すように、帯状の空間の幅方向の中央部を周方向に沿って開口する孔部65aを有し、孔部65aに後述する移動規制部材66を挿通させている。
【0076】
カバー部62は、前後方向の半円柱形状からなり、この半円柱形状の半円の中心部分に凹部を有し、この凹部が前後方向を開口している。
また、カバー部62は、収容部61の左側部の上面に蝶番62aによって接続され、カバー部62を閉じる場合には、止め具(図示省略)によって収容部61に固定される。
カバー部62が閉じられた状態では、収容部61とカバー部62は、前後方向の円柱形状となり、さらに、この円柱の円の中心部分に前後方向を開口する直方体の空間を有している。
【0077】
取付部64は、図示しないが、外枠体60を肘掛け部5の前後方向に移動させるためのガイド部と、外枠体60を肘掛け部5に固定するための固定具と、を備え、ガイドレール5cに沿って前後方向に移動自在に取り付けられ、所望する位置で固定されている。
また、取付部64は、収容部61とカバー部62の外周面に対向し当該外周面の円形と同心円の凹部形状を有する上面64aと、上面64aに立設する移動規制部材66と、を有している。
【0078】
移動規制部材66は、上面64aに立設する支持軸66aと、支持軸66aの先端に取り付けられた棒状の規制部66bと、を有し、上面64aの前後方向中央部において、凹部の中央部と右端部に設けられている。図17において、支持軸66aが実線で示され、規制部66bが隠れ線で示されている。
支持軸66aが孔部65aに挿通され、規制部66bが移動規制領域65に摺動自在に収容されている。
これによって、収容部61は、移動規制領域65の範囲において、取付部64の上面64aで回動することが可能となる。
また、収容部61は、移動規制部材66によって支持されるだけでなく、径方向に係止されている。
【0079】
次に、上述のマッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備え、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0080】
次に、押圧方向調整部70について説明すると、押圧方向調整部70は、収容部61を周方向に回動させる(第1方向を変化させる)取付部64に設置されたピニオン72と、ピニオン72に噛合する収容部61の外周面に設けられたギア73と、ピニオン72を駆動する押圧方向調整駆動部74と、収容部61の回動位置を検出する検出部75と、を備えている。
ピニオン72は、ギア73と噛合するギア72aを外周面に有し、取付部64の左右方向中央及び前方部に設置されている。そして、ピニオン72の大部分が取付部64の内部に収容され、一部が上面64aから突出されている。
【0081】
ギア73は、収容部61の外周面の前方部において、左側端部付近から中央部分に亘って帯状に形成されている。また、収容部61の周方向の回動では、ギア73がピニオン72と噛合する状態が保たれている。
押圧方向調整駆動部74は、正逆方向の回転駆動力を有するモータ74aを備えている。この正逆方向の回転駆動力がベルト(図示省略)によってピニオン72に伝達される。これによって、ピニオン72及びギア73が回動し、収容部61を周方向に回動させることができる。
この場合、収容部61の周方向の回動範囲は、収容部61の外周面に形成されたギア73の周方向の範囲に限定される。
【0082】
検出部75は、図16に示すように、近接スイッチ75aを有し、近接スイッチ75aが収容部61及び取付部64に埋め込まれている。
取付部64では、上面64aの前方部において、左右側端部の二箇所に近接スイッチ75aが埋め込まれている。また、収容部61では、取付部64に埋め込まれた近接スイッチ75aに対向する位置に埋め込まれている。このとき、収容部61に埋め込まれたそれぞれの近接スイッチ75aを通る径方向の直線が交わる角度が90度に設定されている。
【0083】
この場合、収容部61の周方向の回転において、収容部61及び取付部64に埋め込まれた何れかの近接スイッチ75aが径方向で対向する位置になった際、近接スイッチ75aは、収容部61の回動位置を検出し、その検出結果に応じた信号を制御部31(図20参照)に信号を伝達する。
この場合、制御部31は、近接スイッチ75aからの信号を受けて、押圧方向調整駆動部74の回転駆動力を逆方向に変換する。これによって、ピニオン72及びギア73が逆回転し、収容部61が周方向に逆回転する。このようにして、収容部61が周方向に回動することになる。
【0084】
上記の図16乃至図19では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、左右の脚用マッサージ機6は、肘掛本体部5aでなく脚載本体部4bに取付けるので、取り付けるための構造が腕用マッサージ機7と異なるが、その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0085】
図20は、第3実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図20に示すように、制御回路30は、制御部31と、リモコン32と、検出部75と、駆動装置28と、押圧方向調整駆動部74と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、から構成されている。
電磁弁35は、左右の腕用マッサージ機7の有するエアセル23a,23bに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0086】
以上のように、第3実施形態に係る腕用マッサージ機では、対向配置された対のエアセルを被施療部の周方向に回動させることができるので、対のエアセルが被施療部を上下方向だけでなく左右方向から挟みこみことができ、被施療部の上下の部位に加え左右の部位に対してもさすることができる。
この場合、対向配置された対のエアセルの回動中心が被施療部の中心にあるので、被施療部を移動させる必要が無く、より効率的にさすりのマッサージを施すことができる。
このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
【0087】
図21乃至図23は、本発明に係るマッサージ機の第4実施形態を示している。
図21乃至図23に示す右腕の腕用マッサージ機7は、上述のマッサージ機構20と、上述の外枠体10にさらにマッサージ機構20を横転させる(第1方向を変化させる)回転機構などを設けた外枠体80と、を備え、この回転機構によって、被施療部を左右方向から挟みこみ被施療部の左右両側からさすりのマッサージを施すことができる。
【0088】
先ず、外枠体80について説明すると、外枠体80は、上述の外枠体10と、マッサージ機構20を横転させる(第1方向を変化させる)回転機構を有する押圧方向調整部81と、を備えている。
外枠体10は、マッサージ機構20を収容する上部を開口した収容部11と、収容部11及び収容されたマッサージ機構20の上方を覆うカバー部12と、肘掛け部5に取り付けるための取付部14と、を有し、収容部11及び取付部14に押圧方向調整部81が設けられている。
そして、押圧方向調整部81によって、収容部11、カバー部12、及び、収容部11に収容されたマッサージ機構20とが横に回転することができる。
【0089】
すなわち、第1実施形態における収容部11と取付部14とは一体型であるのに対して、第4実施形態においては、図21乃至図23に示すように、収容部11と取付部14とは分離されており、押圧方向調整部81によって接続されている。
その他の点については、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0090】
押圧方向調整部81は、収容部11の底部11aの左端部から下方に突出する回転部82と、回転部82を所定の範囲内で回転自在に支持し取付部14の上部に設けられた回転支持部83と、収容部11を左側に回転させるための駆動力を与える押圧方向調整駆動部84と、収容部11を回転前の状態に戻す引戻し部材85と、を備えている。
【0091】
回転部82は、前方から見て、円形の突出部82aを有し、突出部82aに孔部82bが形成されている。
回転支持部83は、前方から見て、左側を開口する略半円状かつ前後方向に長くなる凹部を有する回転台83aと、回転台83aに取り付けられ前記凹部に配置された前後方向の回転軸83bと、回転軸83bの下方の左側端部に設けられた係止部83cと、を有している。
回転軸83bは、回転部82の孔部82bに回動自在に挿通されている。
【0092】
係止部83cは、回転支持部83の左側端部を水平方向に突出させた突出部を有している。このため、回転部82の左回転では、係止部83cが回転部82に当接することになる。つまり、回転部82の回転が係止部83cによって停止されることになる。また、係止部83cは、回転部82を当接した状態で支持することができる。
【0093】
押圧方向調整駆動部84は、蛇腹状のエアセル84aと、空気を給排するための空気配管84bと、を有している。
蛇腹状のエアセル84aの一方端が収容部11の底部11aに接続され、他方端が回転支持部83の回転台83aに接続されている。
エアセル84aに空気を供給することによって、エアセル84aがその左側端部を支点とする扇状に膨張する。このため、収容部11の底部11aの右側端部が押し上げられ、収容部11及びマッサージ機構20が左側に回転させられる。
また、空気を排気したエアセル84aは、収縮し、薄く重ねられた状態になる。
【0094】
空気配管84bは、回転台83aの孔部(図示省略)に挿通され、取付部14から肘掛け部5の下方に引き回され(図示省略)、座部2の下方に配置された空気給排装置36(図24参照)に接続されている。
引戻し部材85は、バネ85aを有し、前後方向でのエアセル84aの前後において、バネ85aの一方が収容部11の底部11aに接続され、他方が回転支持部83の回転台83aに接続されている。
【0095】
エアセル84aへの空気の供給で収容部11及びマッサージ機構20が左側に回転した際、係止部83cで当該回転が停止され、また、収容部11及びマッサージ機構20が横転した状態で係止部83cに支持される。
さらに、エアセル84aの空気を排気した際には、収縮したエアセル84aと引戻し部材85のバネ85aにより、収容部11及びマッサージ機構20がエアセル84aに空気を供給する前の状態に引き戻される。
【0096】
次に、マッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備え、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0097】
この場合、マッサージ機構20は、この横転した状態においても問題無くマッサージを行うことができる。
また、図16乃至図19に示す第3実施形態に係る腕用マッサージ機7は、被施療部となる腕を中心としてマッサージ機構20が回転しているので、腕を移動させる必要がないのに対して、図21乃至図23に示す腕用マッサージ機7は、マッサージ機構20を横転させるので、マッサージ機構20が横に移動してしまう。このため、マッサージ機構20の移動分、腕を移動させる必要がある。
【0098】
上記の図21乃至図23では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、左右の脚用マッサージ機6は、肘掛本体部5aでなく脚載本体部4bに取付けるので、取り付けるための構造が腕用マッサージ機7と異なるが、その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0099】
図24は、第4実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図24に示すように、制御回路30は、制御部31と、リモコン32と、駆動装置28と、押圧方向調整駆動部84と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、エアセル84aと、から構成されている。
電磁弁35は、左右の腕用マッサージ機7の有するエアセル23及びエアセル84aに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0100】
以上のように、第4実施形態に係る腕用マッサージ機では、対向配置された対のエアセルが上下方向だけでなく左右方向からも被施療部を挟みこむことができるので、被施療部の上下の部位に加え左右の部位に対してもさすることができるようになる。このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
また、第4実施形態の押圧方向調整部が蛇腹状のエアセルを有する回転機構を利用しているので、第3実施形態の押圧方向調整部がギア機構を利用しているのと比べて、簡単な構造でマッサージを施す被施療部の部位の位置を変えることができる。
もっとも、第4実施形態の回転機構では、対向配置された対のエアセルの回転中心が被施療部の外側にあるので、当該回転において被施療部の移動が伴うことになる。
【0101】
図25及び図26は、本発明に係るマッサージ機の第5実施形態を示している。
図25及び図26に示す右腕の腕用マッサージ機7は、上述のマッサージ機構20と、マッサージ機構20を収容し腕の長手方向となる前後方向に移動可能となる(第2方向へ位置変更する)外枠体90と、外枠体90を移動させさすり位置を変更するさすり範囲調整部100と、を備えている。
【0102】
先ず、外枠体90について説明すると、外枠体90は、マッサージ機構20を収容する上部及び前後方向を開口した収容部91と、収容部91及び収容されたマッサージ機構20の上方を覆うカバー部(図示省略)と、を有している。
【0103】
収容部91は、肘掛本体部5aに設置される底部91aと、底部91aの左右両端から上方に突出する左右両側部91bと、を有している。
底部91aは、その内部に空間を有し、左右両側部91bは、それぞれの内部に空間を有しており、底部91aの内部空間に左右両側部91bの内部空間が連続している。
そして、この連続する底部91aの内部空間と左右両側部91bの内部空間が、マッサージ機構20に駆動力を与えるための駆動装置28及び後述する移動機構104の位置変更用駆動部106を収容する駆動室93を構成している。
また、左右両側部91bの内部空間内には、軸受からなる支持部91cが設けられている。マッサージ機構20は、左右の支持部91cに支持され、底部91aと左右両側部91bに囲まれた内側に収容されている。
カバー部(図示省略)は、収容部91の上面に蝶番によって接続される。
【0104】
さすり範囲調整部100は、肘掛本体部5aに設置されるガイド部101と、収容部91の前後方向の移動をガイドするガイド溝102と、収容部91の前後方向の移動を所定範囲に規制する係止部103と、収容部91及びマッサージ機構20を前後方向に移動させる(第2方向へ位置変更させる)移動機構104と、を備えている。
ガイド部101は、底部101aと、底部101aの左右両端から上方に突出する左右両側部101bと、を有している。
また、ガイド部101は、肘掛け部5の前後方向の長さと略同じ長さ寸法を有し、底部101aに設けられた取付部(図示省略)によって、肘掛本体部5aに取り付けられている。底部101aと左右両側部101bに囲まれた内側には、収容部91が前後方向に移動自在に収容されている。
【0105】
底部101aの上面には、前後方向のガイド溝102が形成されている。
係止部103は、下部の支持軸103aと、上部の突出部103bと、を有し、ガイド溝102の前後方向の両端部に配置されている。
支持軸103aは、ガイド溝102に挿入され、突出部103bは、ガイド溝102から突出し、支持軸103aがガイド溝102に固定されている。
また、係止部103は、後述する検出部107による収容部91の移動方向の変更ができなかった場合に、係止部103の突出部103bを収容部91に当接させることによって、収容部91の移動を止めることができる。
【0106】
移動機構104は、収容部91の底部91aに回転可能に取り付けられたローラー105と、ローラー105に回転駆動力を与える位置変更用駆動部106と、収容部91の移動位置を検出する検出部107と、を備えている。
ローラー105は、収容部91の底部91aの左右及び前後にそれぞれ取り付けられ、ガイド溝102に嵌め込まれている。
位置変更用駆動部106は、正逆方向の回転駆動力を有するモータ106aを備え、駆動室93に収容されている。この正逆方向の回転駆動力がベルト(図示省略)によってローラー105に伝達される。これによって、ローラー105が回転し、ガイド溝102に沿って前後方向に移動するので、収容部91を前後方向に移動させることができる。
【0107】
検出部107は、近接スイッチ107aを有し、近接スイッチ107aが収容部91の底部91aの前後方向両端部と、ガイド部101の底部101aの前後方向両端部において係止部103の位置から中央よりの位置にそれぞれ埋め込まれている。
また、収容部91が移動によってガイド部101の前後方向両端部付近に達した際、収容部91の近接スイッチ107aとガイド部101の近接スイッチ107aとが上下方向で対向となる。
【0108】
この場合、収容部91の移動によって収容部91の近接スイッチ107aとさすり範囲調整部100の近接スイッチ107aが上下方向で対向する位置になった際、近接スイッチ107aは、収容部91の位置を検出し、その検出結果に応じた信号を制御部31(図28参照)に信号を伝達する。
この場合、制御部31は、近接スイッチ107aからの信号を受けて、位置変更用駆動部106の回転駆動力を逆方向に変換する。これによって、ローラー105が逆回転し、収容部91が逆方向に向かって移動する。このようにして、収容部91が前後方向に移動することになる。
【0109】
次に、マッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備え、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0110】
図27は、腕用マッサージ機7のさすりのマッサージ動作を示している。
この場合、エアセル23a,23b往復移動の動きを矢印Xで示し、マッサージ機構20の移動を矢印Yで示している。
図27(a)は、矢印Yで示すように、マッサージ機構20が後方から前方に移動している(第2方向へ位置変更する)状態である。
【0111】
この場合、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、マッサージ機構20が後方から前方に移動している間に、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、前後方向の往復移動を繰り返している。
エアセル23aが前方への移動から後方への移動、そしてまた前方への移動へと移動方向を変えている。また、エアセル23bは、エアセル23aとは逆の方向となり、後方への移動から前方への移動、そしてまた後方への移動へと移動方向を変えている。
【0112】
図27(b)は、矢印Xで示すように、マッサージ機構20が前方から後方に移動している(第2方向へ位置変更する)状態である。
この場合も、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、マッサージ機構20が前方から後方に移動している間に、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、前後方向の往復移動を繰り返している。
エアセル23aが前方への移動から後方への移動、そしてまた前方への移動へと移動方向を変えている。また、エアセル23bは、エアセル23aとは逆の方向となり、後方への移動から前方への移動、そしてまた後方への移動へと移動方向を変えている。
【0113】
このように、太さの異なる腕の前後部分においても、付勢手段26(図示省略)によって、一定の押圧刺激を腕に常時与えることができ、また、エアセル23a,23bを腕に常時当接させたままの状態で腕の外周面に沿って移動させることができる。
また、腕の前後方向に移動させながら、さすりのマッサージ動作を繰り返すことによって、より広い範囲にさすりマッサージを施すことができる。
【0114】
上記の図25乃至図27では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、左右の脚用マッサージ機6は、肘掛本体部5aでなく脚載本体部4bに取付けるので、取り付けるための構造が腕用マッサージ機7と異なるが、その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0115】
図28は、第5実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図28に示すように、制御回路30は、制御部31と、リモコン32と、検出部107と、駆動装置28と、位置変更用駆動部106と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、から構成されている。
電磁弁35は、左右の腕用マッサージ機7の有するエアセル23a,23bに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0116】
以上のように、第5実施形態に係る腕用マッサージ機では、対向配置された対のエアセルが被施療部を挟みこみ、この対のエアセルは、被施療部の長さ方向に共に一定範囲で往復移動するだけでなく、同時に被施療部の長さ方向に移動するので、被施療部の長さ方向において全体的にさすることができるようになる。このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
【0117】
図29は、本発明に係るマッサージ機の第6実施形態を示している。
図29に示す右腕の腕用マッサージ機7は、上述のマッサージ機構20と、マッサージ機構20を被施療部となる腕の周方向に回転させる(第1方向を変化させる)機構など上述の押圧方向調整部70とは異なるギア機構を有する押圧方向調整部110と、マッサージ機構20を収容し腕の長手方向となる前後方向に移動可能となる(第2方向へ位置変更する)外枠体120と、外枠体120を移動させさすり位置を変更する上述のさすり範囲調整部100と、を備えている。
【0118】
先ず、外枠体120について説明すると、外枠体120は、マッサージ機構20を収容する収容部121と、腕の周方向に回転する収容部121を支持する回転支持部122と、を有している。
【0119】
収容部121は、前後方向の円柱形状を有し、この円柱の円の中心部分に前後方向を開口する直方体の空間を有している。この直方体の空間には、マッサージ機構20が収容されている。
また、収容部121の内部には、マッサージ機20の駆動装置を収容する駆動室(図示省略)が設けられている。
回転支持部122は、直方体の形状を有し、その左右上下方向の中央部に前後方向を開口する円筒空間を有している。そして、回転支持部122の円筒空間に収容部121が回転可能に収容されている。
【0120】
さすり範囲調整部100は、肘掛本体部5aに設置されるガイド部101と、収容部121の前後方向の移動をガイドするガイド溝102と、収容部121の前後方向の移動を所定範囲に規制する係止部103と、収容部121及びマッサージ機構20を前後方向に移動させる移動機構104(図示省略)と、を備えている。
また、移動機構104(図示省略)は、回転支持部122の底面に回転可能に取り付けられたローラーと、回転支持部122の内部に収容されローラーに回転駆動力を与える位置変更用駆動部と、回転支持部122の移動位置を検出する検出部と、を備えている。
さすり範囲調整部100及び移動機構104(図示省略)は、その他の点については、第5実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0121】
次に、マッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備え、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0122】
次に、押圧方向調整部110について説明すると、押圧方向調整部110は、上述の押圧方向調整部70を備え、押圧方向調整部70のギア73が収容部121の外周面に前周に亘って形成され、検出部75の近接スイッチ75aが収容部121と回転支持部122に埋め込まれている。
収容部121と回転支持部122に埋め込まれた近接スイッチ75aは、押圧方向調整部110が停止している状態において、径方向で対向する位置に配置されている。
押圧方向調整部70は、収容部121を周方向に回動させる回転支持部122に設置されたピニオン72と、ピニオン72に噛合する収容部121の外周面に設けられたギア73と、ピニオン72を駆動する押圧方向調整駆動部74と、収容部121の回動位置を検出する検出部75と、を備え、第3実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0123】
この場合、ピニオン72の回転によってギア73が回転し、収容部121が周方向に回転するので、収容部121が周方向に一回転以上できるようになる。なお、収容部121は検出部75により半周程度で正逆回動するように制御してもよい。そうすれば、エアセル23a,23bに空気を給排するための空気配管(図示省略)は短くて済む。
また、検出部75は、収容部121と回転支持部122に埋め込まれた近接スイッチ75aが径方向で対向する位置になった場合、押圧方向調整駆動部74の回転駆動力を逆方向に変えることも、押圧方向調整駆動部74の回転駆動力の方向を維持することもできる。
押圧方向調整駆動部74の回転駆動力の方向を維持した場合、押圧方向調整部110による周方向の移動と移動機構104による前後方向の移動によって、マッサージ機構20のエアセル23a,23bは、前後方向の往復移動に加えて、腕に対して螺旋状の移動を行うことができる。
【0124】
図30は、腕用マッサージ機7のさすりのマッサージ動作を示している。
この場合、エアセル23a,23b往復移動の動きを矢印Xで示し、マッサージ機構20の螺旋状の移動を矢印Zで示している。
図30(a)は、矢印Zで示すように、マッサージ機構20が後方から前方に向かって螺旋状に移動している(第1方向を変化させ、さらに第2方向へ位置変更している)状態である。
【0125】
この場合、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、マッサージ機構20が後方から前方に螺旋状に移動している間に、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、前後方向の往復移動を繰り返している。
エアセル23aが前方への移動から後方への移動、そしてまた前方への移動へと移動方向を変えている。また、エアセル23bは、エアセル23aとは逆の方向となり、後方への移動から前方への移動、そしてまた後方への移動へと移動方向を変えている。
【0126】
図30(b)は、矢印Zで示すように、マッサージ機構20が後方に向かって螺旋状に移動している(第1方向を変化させ、さらに第2方向へ位置変更している)状態である。
この場合も、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、マッサージ機構20が前方から後方に螺旋状に移動している間に、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、前後方向の往復移動を繰り返している。
エアセル23aが前方への移動から後方への移動、そしてまた前方への移動へと移動方向を変えている。また、エアセル23bは、エアセル23aとは逆の方向となり、後方への移動から前方への移動、そしてまた後方への移動へと移動方向を変えている。
【0127】
このように、太さの異なる腕の前後部分においても、付勢手段26(図示省略)によって、一定の押圧刺激を腕に常時与えることができ、また、エアセル23a,23bを腕に常時当接させたままの状態で腕の外周面に沿って螺旋状に移動させることができる。
また、腕の前後方向及び周方向に移動させながら、さすりのマッサージ動作を繰り返すことによって、より広い範囲にさすりマッサージを施すことができる。
【0128】
上記の図29乃至図30では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、左右の脚用マッサージ機6は、肘掛本体部5aでなく脚載本体部4bに取付けるので、取り付けるための構造が腕用マッサージ機7と異なるが、その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0129】
図31は、第6実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図31に示すように、制御回路30は、制御部31と、リモコン32と、検出部75と、検出部107と、駆動装置28と、押圧方向調整駆動部74と、位置変更用駆動部106と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、から構成されている。
電磁弁35は、左右の腕用マッサージ機7の有するエアセル23a,23bに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0130】
以上のように、第6実施形態に係る腕用マッサージ機では、対向配置された対のエアセルが被施療部となる腕を挟みこみ、この対のエアセルは、被施療部の長さ方向に共に一定範囲で往復移動するだけでなく、被施療部の長さ方向に移動させながら、さらに被施療部の周方向に回転させることができるので、被施療部に対して螺旋状にさすることができるようになる。しかも、被施療部の長さ方向及び周方向において全体的にさすることができるようになる。このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
【0131】
なお、本発明は上記実施形態に限定されるものではない。
例えば、第2実施形態では、押圧部材を板状からなる施療子43としているが、エアセル23であっても良く、他の実施形態において、エアセル23としている押圧部材を施療子43としても良い。
また、各支持板22に設けられるエアセルの配置・数は、適宜変更可能である。
さらに、押圧部材を付勢する付勢手段は、例えば、エアを用いた付勢手段26を採用することができる。エアを用いた付勢手段26では、押圧部材のエアセル23a,23bに対してエアを供給することによって、エアセル23a,23bを被施療部に常時当接させ、押圧刺激を常時付与しながらさすりのマッサージを施すことができるようになる。 このように、本発明の要旨を逸脱しない範囲において種々なる態様で実施し得る。
【図面の簡単な説明】
【0132】
【図1】本発明に係るマッサージ機の第1実施形態を具備した椅子型マッサージ装置の斜視図である。
【図2】第1実施形態に係る腕用マッサージ機のカバーを開けた状態を示す斜視図である。
【図3】第1実施形態に係る腕用マッサージ機のカバーを閉じた状態を示す側面断面図である。
【図4】図3のA−A線断面図である。
【図5】第1実施形態に係る腕用マッサージ機の動作を示す説明図である。
【図6】第1実施形態に係る脚用マッサージ機を示す斜視図である。
【図7】第1実施形態に係る脚用マッサージ機及び腕用マッサージ機における制御ブロックを示す図である。
【図8】第2実施形態に係る腕用マッサージ機のカバーを開けた状態を示す斜視図である。
【図9】図8のB−B線断面図である。
【図10】図9のC−C線断面図である。
【図11】図9のD−D線断面図である。
【図12】第2実施形態に係る腕用マッサージ機の動作を示す説明図である。
【図13】第2実施形態に係る腕用マッサージ機の対の施療子の対向間隔を調整するための手順を説明する説明図である。
【図14】第2実施形態に係る腕用マッサージ機の対の施療子の対向間隔を調整するための次の手順を説明する説明図である。
【図15】第2実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【図16】第3実施形態に係る腕用マッサージ機のカバーを開けた状態を示す斜視図である。
【図17】第3実施形態に係る腕用マッサージ機のカバーを閉じた状態を示す側面断面図である。
【図18】図17のE−E線断面図である。
【図19】図18の腕用マッサージ機が周方向に回転した状態を示す断面図である。
【図20】第3実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【図21】第4実施形態に係る腕用マッサージ機のカバーを閉じた状態を示す側面断面図である。
【図22】図21のF−F線断面図である。
【図23】図22の腕用マッサージ機が90度横に傾けた状態を示す断面図である。
【図24】第4実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【図25】第5実施形態に係る腕用マッサージ機のカバーを開けた状態を示す斜視図である。
【図26】図25のG−G線断面図である。
【図27】第5実施形態に係る腕用マッサージ機の往復移動のさすり動作を示す説明図である。
【図28】第5実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【図29】第6実施形態に係る腕用マッサージ機の斜視図である。
【図30】第6実施形態に係る腕用マッサージ機の螺旋さすり動作を示す説明図である。
【図31】第6実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【符号の説明】
【0133】
1 椅子型マッサージ装置
4 脚載部
5 肘掛け部
6 脚用マッサージ機
7 腕用マッサージ機
10 外枠体
11 収容部
13 駆動室
14 取付部
20 マッサージ機構
21 回動部
22 支持板
23 エアセル
25 ガイド部
26 付勢手段
30 制御回路
31 制御部
32 リモコン
35 電磁弁
36 空気給排装置
40 マッサージ機構
42 支持板
43 施療子
45 ガイド部
46 付勢手段
47 移動規制部
48 間隔調整部
60 外枠体
65 移動規制領域
66 移動規制部材
70 押圧方向調整部
72 ピニオン
73 ギア
74 押圧方向調整駆動部
75a 近接スイッチ
80 外枠体
81 押圧方向調整部
84 押圧方向調整駆動部
84a エアセル
90 外枠体
100 さすり範囲調整部
101 ガイド部
104 移動機構
105 ローラー
106 位置変更用駆動部
110 押圧方向調整部
120 外枠体
【技術分野】
【0001】
本発明は、被施療者に対してさすりマッサージを施すことができるマッサージ機、及び椅子型マッサージ装置に関する。
【背景技術】
【0002】
被施療者に対してさすりのマッサージを施すことができるマッサージ機として、従来知られているものに、特許文献1に示しているものがある。
特許文献1に記載されているマッサージ機のフットレストは、被施療部を支持する支持台部と、支持台部と被施療部を挟むために支持台部に対向するように配置された移動部と、を有している。移動部は、被施療部の長さ方向に移動自在となるローラーを有し、支持台部及びローラーは、施療部を構成する空気袋を有している。
そして、特許文献1に記載されているマッサージ機は、支持台部と移動部のローラーに備えられた施療部で被施療部を挟み、この施療部で被施療部に押圧刺激を与える。また、ローラーを被施療部の長さ方向に移動させ、被施療部上を転動させることによって、被施療部の押圧刺激位置が連続的に変化する動作を可能としている。この動作が所謂さすり揉みのマッサージとされている。
【0003】
【特許文献1】特開2004−202207号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているマッサージ機では、施療部を有する支持台部と移動部のローラーのうち、一方のローラー側施療部が被施療部の長さ方向に移動自在であり、他方の支持台部側施療部が固定された構造となっている。
この場合、被施療部の長さ方向にローラーが移動かつ転動することによって、被施療部の押圧刺激位置を連続的に変化させている。これにより、被施療部にさすりのマッサージが施されることになる。すなわち、さすりのマッサージ効果が得られるのはローラー側の被施療部だけであり、支持台部側の被施療部に対してさすりのマッサージを施すには、当該被施療部をローラー側に移動させる、つまり、当該被施療部の向きを変える必要がある。
【0005】
このため、被施療部に対するマッサージの実施回数が増えるので、さすりのマッサージに要する時間が長くなってしまう。
しかも、被施療部が脚の場合、椅子型マッサージ装置に座った状態で脚の向きを変えることが出来ないという問題もある。
【0006】
また、この場合、移動部のローラーは、被施療部の太さに関わらず支持台部と所定の間隔を有して被施療部の長さ方向に移動するので、被施療部の太さによってローラー側施療部の被施療部に付与する押圧刺激の強さが変わることになる。特に、被施療部が脚の場合、脹脛と足首付近の太さが著しく異なるため、当該所定の間隔を脹脛に合わせるとローラー側施療部で足首付近を押圧できなくなり、逆に、当該所定の間隔を足首付近に合わせると脹脛部分ではローラー側施療部の押圧刺激が強過ぎてしまうことになる。
このため、被施療部にマッサージを施したとしても、そのマッサージの効果が得られるのは、被施療部の一部に限られてしまうという問題を有している。
【0007】
そこで、この本発明は、前記問題点に鑑みてなされたものであり、対向配置された施療部が被施療部を両側から挟み、この両施療部を共に往復移動させて効率的にさすりのマッサージを施すことができ、さらに、被施療部全体において、対の施療部が被施療部に常時当接し、押圧刺激を常時付与することで良好なさすりのマッサージ効果を得ることができるマッサージ機、及び椅子型マッサージ装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、第1押圧部材と、前記第1押圧部材との間に被施療部を配置できるように前記第1押圧部材に対して間隔をおいて対向配置された第2押圧部材と、前記両押圧部材を、当該両押圧部材が互いに近接離反する第1方向、及び当該第1方向に対して略直交する第2方向に、移動自在に支持する支持部材と、前記両押圧部材が互いに近接する方向へ、前記両押圧部材を付勢する付勢手段と、前記付勢手段によって付勢された前記両押圧部材を、それぞれ、前記第2方向に往復移動させて、前記両押圧部材によって被施療部へのさすりマッサージを行わせるためのさすり駆動装置と、を備えていることを特徴とする。
【0009】
本発明のマッサージ機によれば、付勢手段により互いに近接する方向に付勢された両押圧部材が被施療部を挟み、被施療部に両側から押圧刺激を付与することができる。
また、付勢手段によって両押圧部材が被施療部に当接されるので、第2方向となる被施療部の長さ方向における両押圧部材の往復移動では、両押圧部材が被施療部の外周面の形状に沿って移動することができる。
この場合、両押圧部材が被施療部に常時当接した状態となり、両押圧部材が押圧刺激を常時付与しながら被施療部の外周面を両側から反復的にさするように動作することができる。
【0010】
上記のマッサージ機において、前記支持部材は、前記押圧部材を支持し、かつ前記押圧部材とともに前記第1方向に移動自在に設けられた第1支持体と、前記駆動装置によって駆動されることで、前記第1支持体を前記第2方向へ移動させるように、前記第1支持体を支持する第2支持体と、を備え、
前記第2支持体は、前記第1支持体を、前記第1方向に移動自在に支持するためのガイド部を有しているのが好ましい。
【0011】
この場合、駆動装置によって駆動された第2支持体が第1支持体及び押圧部材に駆動力を与えるので、押圧部材が第2方向に移動できるようになる。
また、第1支持体は、第2支持体のガイド部で第1方向に移動自在に支持されている、換言すれば、第1支持体がガイド部によって移動範囲を規制されている。
すなわち、第1支持体に支持された第1押圧部材及び第2押圧部材が互いに近接離反し過ぎることを防止できる。これによって、両押圧部材の互いの近接し過ぎによる被施療部への押圧刺激が強過ぎたり、若しくは、両押圧部材の互いの離反し過ぎによる被施療部への押圧ができなくなるようなことがない。
【0012】
また、上記のマッサージ機において、前記支持部材は、前記第1押圧部材と前記第2押圧部材との対向間隔を調整自在に構成されているのが好ましい。
この場合、被施療部の太さに対して両押圧部材の対向間隔を調整することができるので、被施療部の太さに関わらずに効果的なさすりマッサージを施すことができる。
【0013】
また、上記のマッサージ機において、前記両押圧部材が互いに近接離反する前記第1方向を変化させるための押圧方向調整部を有しているのが好ましい。
この場合、第1方向を変化させる、つまり、被施療部の周方向において被施療部を挟む両押圧部材の位置を変えることができるので、被施療部の周方向の広い範囲にさすりマッサージを施すことができる。
【0014】
また、上記のマッサージ機において、前記押圧方向調整部は、前記第1方向を変化させるための駆動力を発生する押圧方向調整駆動部と前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記押圧方向調整駆動部を動作させて前記第1方向を変化させる制御部と、をさらに備えているのが好ましい。
この場合、両押圧部材を第2方向に往復移動させ、被施療部に対しさすりマッサージを施している状態で、さらに、被施療部の周方向において被施療部を挟む両押圧部材の位置を変えることができる。これによって、被施療部の周方向の広い範囲に対し連続してさすりマッサージを施すことができる。
【0015】
また、上記のマッサージ機において、前記両押圧部材が前記さすり駆動装置によって前記第2方向へ往復移動するさすり範囲を、前記第2方向へ位置変更するためのさすり範囲調整部を備えているのが好ましい。
この場合、さすり範囲を第2方向へ位置変更する、つまり、被施療部の長さ方向において被施療部を挟む両押圧部材の位置を変えることができるので、被施療部の長さ方向の広い範囲にさすりマッサージを施すことができる。
【0016】
また、上記のマッサージ機において、前記さすり範囲調整部は、前記第2方向へ前記さすり範囲を位置変更させるための駆動力を発生する位置変更用駆動部と、前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記位置変更用駆動部を動作させて前記さすり範囲の位置を第2方向に変化させる制御部と、をさらに備えているのが好ましい。
この場合、両押圧部材を第2方向に往復移動させ、被施療部に対しさすりマッサージを施している状態で、若しくは、両押圧部材を第2方向に往復移動させ、かつ、被施療部の周方向において被施療部を挟む両押圧部材の位置を変えながら被施療部に対しさすりマッサージを施している状態で、さらに、被施療部の長さ方向において被施療部を挟む両押圧部材の位置を変えることができる。これによって、被施療部の周方向の広い範囲に対し、若しくは、被施療部の周方向及び長さ方向の広い範囲に対し、連続してさすりマッサージを施すことができる。
【0017】
また、上記のマッサージ機において、前記両押圧部材が互いに近接離反する前記第1方向を変化させるための駆動力を発生する押圧方向調整駆動部と、前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記押圧方向調整部を動作させて前記第1方向を変化させる制御部と、を備える押圧方向調整部と、前記両押圧部材が前記さすり駆動装置によって前記第2方向へ往復移動するさすり範囲を、前記第2方向へ位置変更するための駆動力を発生する位置変更用駆動部と、前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記位置変更用駆動部を動作させて前記さすり範囲の位置を第2方向に変化させる制御部と、を備えるさすり範囲調整部と、を有しているのが好ましい。
この場合、両押圧部材を第2方向に往復移動させ、被施療部に対しさすりマッサージを施している状態で、被施療部の周方向において被施療部を挟む両押圧部材の位置を変えることができ、さらに、被施療部の長さ方向において被施療部を挟む両押圧部材の位置を変えることができる。これによって、被施療部の周方向及び長さ方向の広い範囲に対し連続してさすりマッサージを施すことができる。
【発明の効果】
【0018】
以上の通り、本発明によれば、対向配置された押圧部材が被施療部を両側から挟み、この両押圧部材を共に往復移動させることができるので、効率的にさすりのマッサージを施すことができるとともに、両押圧部材が被施療部に常時当接し、押圧刺激を常時付与しながらさすることができるので、良好なさすりのマッサージ効果を得ることができる。
【発明を実施するための最良の形態】
【0019】
以下、図面に基づいて本発明の実施の形態を説明する。
図1乃至図7は、本発明に係るマッサージ機の第1実施形態を示している。
図1は、第1実施形態に係るマッサージ機を具備した椅子型マッサージ装置1の斜視図である。この椅子型マッサージ装置1は、座部2と、座部2の後部に配置された背もたれ部3と、座部の前部に配置された脚載部4と、座部2の左右両側に配置された肘掛け部5と、を備えている。
なお、本実施形態において、図1の状態にある背もたれ部3の高さ方向を上下方向、奥行き方向を前後方向といい、さらに、前方から見た背もたれ部3の幅方向を左右方向という。
【0020】
背もたれ部3は、後方へのリクライニングが可能(回動可能)となるように座部2に取り付けられている。
脚載部4は、座部2に回動可能に取り付けられて、図1の下方垂れ下がり状態から図示しない前方突出状態となることができる。
背もたれ部3を後方に倒し、脚載部4を上昇させると、背もたれ部3から脚載部4までの範囲が略フラットになり、被施療者は仰臥状態をとることができる。
この場合、座部2、背もたれ部3、脚載部4のいずれか又は全部には、施療部(図示省略)が配置されており、着座状態又は仰臥状態の被施療者にマッサージを施すことができる。施療部としては、モータによって駆動される揉み玉や、空気の給排によって膨張収縮するエアセルなど様々なものを採用できる。
【0021】
また、脚載部4は、下方端部を前方に突出させた左右の足底を支持する足底部4aと、左右の両脚を支持する脚載本体部4bと、後部に配置された上下方向のガイドレール4cと、を有している。
脚載本体部4bには、後述する左右の脚用マッサージ機6が取り付けられている。
【0022】
肘掛け部5は、その後部が背もたれ部3の左右側面に取り付けられており、座部2の左右両側方位置において前方に延設されている。
また、肘掛け部5は、腕を支持する肘掛本体部5aと、後部に設けられた左右方向の軸5bと、下部に配置された前後方向のガイドレール5cと、を有している。
左右の肘掛本体部5aには、後述する腕用マッサージ機7がそれぞれ取り付けられている。
軸5bは、背もたれ部3内部において背もたれ部としての骨格をなす背もたれフレーム(図示省略)に対して枢着されているので、肘掛け部5が軸5bまわりに回動自在となる。これによって、肘掛け部5は、図1のようにその前部が略前方を向いた状態や、図示しないが、その前部が上方に向くように後方に回動して起き上がった状態をとることができる。
【0023】
つまり、肘掛け部5が邪魔な場合や、被施療者が座部2の側方から着座又は離座したい場合には、肘掛け部5を回動させることで、座部2の側方に肘掛け部5が存在しない状態にすることができるので、被施療者は楽に側方から着座又は離座を行うことができる。
【0024】
図2乃至図4は、肘掛本体部5aに取り付けられた右腕の腕用マッサージ機7を示している。
この腕用マッサージ機7は、前後方向が開口する外枠体10と、さすりマッサージの動作のためのマッサージ機構20と、を備えている。
外枠体10は、マッサージ機構20を収容する上部及び前後方向を開口した収容部11と、収容部11及び収容されたマッサージ機構20の上方を覆うカバー部12と、肘掛け部5に取り付けるための取付部14と、を有している。
【0025】
収容部11は、肘掛本体部5aに設置される底部11aと、底部11aの左右両端から上方に突出する左右両側部11bと、を有している。
底部11aは、その内部に空間を有し、左右両側部11bは、それぞれの内部に空間を有しており、底部11aの内部空間に左右両側部11bの内部空間が連続している。
この連続する底部11aの内部空間と左右両側部11bの内部空間が、後述するマッサージ機構20に駆動力を与えるための駆動装置28を収容する駆動室13を構成している(図3、図4参照)。
また、左右両側部11bの内部空間内には、軸受からなる支持部11cが設けられている。マッサージ機構20は、左右の支持部11cに支持され、底部11aと左右両側部11bに囲まれた内側に収容されている。
【0026】
カバー部12は、収容部11の左側部の上面に蝶番12aによって接続され、カバー部12を閉じる場合には、止め具(図示省略)によって収容部11に固定される。
取付部14は、底部11aの左側端部から下方に突出する側部14aと、側部14aの下端部の前後方向中央から左右方向中央へ向けて延びるガイド部17と、ガイド部17を肘掛け部5に固定するための固定具15と、を備えている。
ガイド部17は、ガイド孔17aを有し、ガイド孔17aに肘掛け部5のガイドレール5cが摺動自在に挿通されている。このため、ガイド部17がガイドレール5cに沿って前後方向に移動自在になる。これによって、外枠体10を肘掛け部5の前後方向に移動させることができる。
また、ガイド部17は、固定具15によってガイドレール5cに固定される。
【0027】
次に、マッサージ機構20について説明すると、マッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備えている。
【0028】
対のエアセル23は、被施療部となる腕を上方から押圧する第1エアセル(第1押圧部材)23aと、腕を下方から押圧する第2エアセル(第2押圧部材)23bと、を有している。
エアセル23a,23bは、それぞれ空気を給排するための空気配管27を有し、各空気配管27は、後述する支持板22の孔部22bに挿通され、外枠体10の駆動室13を経由して、肘掛け部5の下方に引き回され(図示省略)、座部2の下方に配置された空気給排装置36(図7参照)に接続されている。
この場合、エアセル23a,23bに供給する空気の量によって、腕に与える押圧刺激の強さを変えることができる。
【0029】
各支持板22は、それぞれ前後方向中央部の左右両側面を突出させた左右の軸部22aと、上下を貫通した孔部22bと、を有している。
各軸部22aは、それぞれ回動部21のガイド部25に支持され、かつ、回動部21より前後方向の駆動力を与えられる。これによって、各支持板22が前後方向に往復移動する。
この場合、各支持板22は、その前後方向において、一点で支持されているため、各支持板22の前後方向の端部が傾動自在になる。
各孔部22bには、各支持板22の対向する面で支持するエアセル23の空気配管27が挿通され、空気配管27を前述の空気給排装置36(図7参照)に接続するために各支持板22の他方の面側に導いている。
【0030】
各回動部21は、それぞれ円形の板部材からなり、互いに対向する内側の面において、付勢手段26及びガイド部25と、各支持板22の往復移動における上下動を規制する前後方向に形成された所定幅の規制溝21aと、を有している。
規制溝21aは、図3に破線で示されており、各回動部21の上部と下部に形成されている。
この場合、各支持板22の前後方向の往復移動において、各支持板22の上下方向の移動が規制溝21aの幅範囲内に規制されることになる。これによって、各支持板22が水平方向に対して必要以上に傾き、腕に対して強い押圧刺激を与えること防止することができる。
【0031】
ガイド部25は、回動部21の径方向かつ上下方向の溝を有し、この溝が回動部21の上部と下部とに形成されている。ガイド部25の溝には、各支持板22の軸部22aが収容され、当該溝の長さ寸法の範囲内で各支持板22が互いに近接する方向、つまり、上下方向に移動自在に支持されている。
また、ガイド部25によって、軸部22aが所定範囲を超えて上下方向を移動することを規制している。つまり、ガイド部25の溝の壁面がストッパーとなり、軸部22aがガイド部25の溝の壁面を超えて移動することを防止している。これによって、各支持板22が近接し過ぎて、エアセル23a,23bの腕への押圧刺激が強過ぎたり、若しくは、各支持板22が離反し過ぎて、エアセル23a,23bが腕に対して押圧できなくなるようなことがなくなる。
【0032】
さらに、各回動部21の回動により、ガイド部25の溝の壁面が軸部22aに対して前後方向の押圧力を与える。つまり、各支持板22を前後方向に往復移動させるための駆動力が軸部22aに与えられる。
このとき、ガイド部25に対して上下方向に所定の範囲で軸部22aが移動自在になるので、各回動部21の回動による円運動の軌跡を、各支持板22の直線運動の軌跡ないしは被施療部となる腕の外周面に沿った軌跡に変換できる。
すなわち、各回動部21の回動を各支持板22の前後方向の往復移動に変換する際、各支持板22の上下方向の移動を吸収することができる。
【0033】
付勢手段26は、バネからなり、図4に示すように、各回動部21の頂点部と底点部にそれぞれ設けられている。そして、各回動部21の頂点部に設けられた各付勢手段26が上側の支持板22の上面の前後方向中央部分における左右両端部に取り付けられ、各回動部21の底点部に設けられた各付勢手段26が下側の支持板22の下面の前後方向中央部分における左右両端部に取り付けられている。
この場合、各付勢手段26による付勢力は、被施療部となる腕の太さに対応して各支持板22及びエアセル23a,23bが互いに近接離反できる程度のものとされている。
このため、各付勢手段26によって各支持板22が互いに近接する方向に付勢され、つまり、エアセル23a,23bが腕に向かって上下方向に付勢され、各支持板22及びエアセル23a,23bの対向間隔が腕の太さに合わせて調整されることになる。
また、このバネからなる各付勢手段26で各支持板22及びエアセル23a,23bが上下方向外側への移動も自在になるので、腕の太さに関わらず腕の外周面に沿った往復移動が行える。これによって、エアセル23a,23bが腕に常時当接し、一定の押圧刺激を常時付与することができる。
【0034】
回動軸24は、その一方端を回動部21の円形の中心部に固着され、他方端が収容部11の支持部11cに回動自在に支持されている。
駆動装置28は、正逆方向の回転駆動力を有するモータ29と、モータ29の左右両端部から突出するモータ軸29aと、モータ軸29aの回転動を伝達するためのベルト29bと、を備えている。
ベルト29bが左右のモータ軸29aと回動軸24にそれぞれ巻き掛けられている。
モータ29の正逆方向の回転駆動力が回動軸24及び各回動部21を正逆回動させ、さらに、各支持板22及びエアセル23a,23bを往復移動させる。
【0035】
図5は、腕用マッサージ機7のさすりのマッサージ動作を示している。
図5(a)は、矢印Xで示すように、各回動部21の上部が後方側に回転した状態である。
この場合、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、エアセル23aが後方に、エアセル23bが前方に、それぞれ腕の外周面に沿って移動している。
図5(b)は、矢印Xで示すように、各回動部21の上部が前方側に回転した状態である。
この場合も、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、エアセル23aが前方に、エアセル23bが後方に、それぞれ腕の外周面に沿って移動している。
【0036】
しかも、図5(a)の状態から図5(b)の状態への移動では、エアセル23aは、後方への移動から前方への移動と移動方向を変え、エアセル23bは、前方への移動から後方への移動へと移動方向を変え、それぞれ前後方向に往復移動を行っている。
この場合、エアセル23a,23bは、付勢手段26(図示省略)に付勢されたままの状態になるので、腕に常時当接し、一定の押圧刺激を常時付与しながら往復移動をする。
このようにして、腕の外周面がエアセル23a,23bによってさすられることになる。
さらに、この往復移動を繰り返すことによって、さすりのマッサージ動作になる。
【0037】
上記の図2乃至図5では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
【0038】
図6は、座部2に対して前方突出状態(水平状態)としたとなる脚載本体部4bに取り付けられた右脚の脚用マッサージ機6を示している。
なお、下記は脚載本体部4bを前方突出状態とした場合を基準に説明する。
この脚用マッサージ機6のマッサージ機構20は、左右方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を左右方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を上下両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26(図示省略)と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28(図示省略)と、を備えている。
【0039】
すなわち、図2に示す腕用マッサージ機7のマッサージ機構20は、腕を上下方向から挟みこむエアセル23a,23bを有し、腕の上下両側からさすりのマッサージを施すのに対して、図6に示す脚用マッサージ機6のマッサージ機構20は、脚を左右方向から挟みこむエアセル23a,23bを有し、脚の左右両側からさすりのマッサージを施すことになる。脚は前後方向へ開口している開口部から挿入する。
マッサージ機構20のその他の点については、図2に示す腕用マッサージ機7と異なるところはないので、詳細な説明は省略する。
【0040】
また、脚用マッサージ機6の外枠体10は、マッサージ機構20を収容する前後方向を開口した収容部11と、収容部11及び収容されたマッサージ機構20を覆うカバー部12と、脚載部4に取り付けるための取付部14と、を有している。
収容部11は、脚載本体部4bに設置される底部11aと、前方から見て(図6に示す矢印Vの方向から見て)、底部11aの左側端部から上方に突出する側部11bと、側部11bの上端部から右側に延びる上部11dと、を有している。
底部11aの右側端部及び上部11dの右側端部には、カバー部12が接続されている。
また、底部11aと側部11bと上部11dとは、それぞれの内部に空間を有しており、底部11aと側部11bと上部11dとのそれぞれの内部空間が連続している。
【0041】
そして、この連続する底部11aの内部空間と側部11bの内部空間と上部11d内部空間がマッサージ機構20に駆動力を与えるための駆動装置28を収容する駆動室13(図示省略)を構成している。
また、底部11aと上部11dの内部空間内には、軸受からなる支持部11c(図示省略)が設けられている。マッサージ機構20は、上下の支持部11cに支持され、底部11aと側部11bと上部11dとに囲まれた内側に収容されている。
【0042】
取付部14は、底部11aの左側端部から下方に突出する側部14aと、側部14aの下端部の前後方向中央から右側に延びるガイド部17(図示省略)と、ガイド部17(図示省略)を脚載部4に固定するための固定具15と、を備えている。
ガイド部17(図示省略)は、ガイド孔17a(図示省略)を有し、ガイド孔17aに脚載部4のガイドレール4cが摺動自在に挿通されている。このため、ガイド部17(図示省略)がガイドレール4cに沿って前後方向に移動自在になる。これによって、外枠体10を脚載部4の前後方向に移動させることができる。
【0043】
すなわち、図2に示す腕用マッサージ機7の外枠体10は、駆動装置28を収容する駆動室13が底部11aと左右両側部11bとに設けられ、各支持板22及びエアセル23a,23bに左右両側から駆動力を与える構造を有しているのに対して、図6に示す脚用マッサージ機6の外枠体10は、駆動装置28を収容する駆動室13が底部11aと側部11bと上部11dとに設けられ、各支持板22及びエアセル23a,23bに上下両側から駆動力を与える構造を有していることになる。
外枠体10のその他の点については、図2に示す腕用マッサージ機7と異なるところはないので、詳細な説明は省略する。
【0044】
上記の図6では、右脚の脚用マッサージ機6について説明したが、左脚の脚用マッサージ機6は、右脚の脚用マッサージ機6と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
【0045】
図7は、脚用マッサージ機6及び腕用マッサージ機7において設けられる制御回路30の一例である。図7に示すように、制御回路30は、制御部31と、リモコン32と、駆動装置28と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、から構成されている。
電磁弁35は、左右の脚用マッサージ機6と、左右の腕用マッサージ機7の有するエアセル23a,23bに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0046】
以上のように、第1実施形態に係るマッサージ機では、対向配置された対のエアセルが被施療部を上下方向若しくは左右方向から挟みこみ、この対のエアセルを共に往復移動させることができる。これによって、被施療部の上下若しくは左右両側からさすることができるようになるので、効率的にさすりのマッサージを施すことができる。
また、伸縮自在な付勢手段によって対のエアセルが被施療部を上下方向若しくは左右方向から挟みこみ、被施療部に常時当接することができる。これにより、対のエアセルが上下若しくは左右両側から被施療部を一定の押圧刺激で常時さすることができるので、被施療者は、良好なさすりのマッサージ効果を得ることができる。
しかも、付勢手段は、マッサージ機を使用するときに対のエアセルを互いに近接させるので、マッサージ機を使用していない状態における対のエアセルの対向間隔は、付勢手段を備えていない場合に比べて、広く設定することができる。
これによって、マッサージ機を使用する際、対のエアセルの間に被施療部を挿入する又は引き抜くことが容易にできるようになる。
【0047】
図8乃至図11は、本発明に係るマッサージ機の第2実施形態を示している。
図8乃至図11に示す右腕の腕用マッサージ機7は、対の支持板の対向間隔を調整する機構など上述のマッサージ機構20とは異なるリンク機構を有するマッサージ機構40を備えている。
【0048】
このマッサージ機構40は、上下方向に所定の間隔で対向に配置された対の施療子43と、対の施療子43を上下方向外側から支持する対の支持板(第1支持体)42と、対の支持板42の対向間隔を調整するための間隔調整部48と、対の支持板42に前後方向(第2方向)の駆動力を与え支持板42を左右両側から支持する対の回動部(第2支持体)41と、対の支持板42の互いに近接離反する方向(第1方向)に対の支持板42を移動自在に支持するために対の回動部41に形成されたガイド部45と、対の施療子43を互いに近接する方向に付勢するため対の支持板42に支持された付勢手段46と、対の支持板42を一定間隔で往復移動させるために対の回動部41の左右外側に設けられた移動規制部47と、対の回動部41に設けられた回動軸44と、回動軸44に回動駆動力を与えるための駆動装置28と、を備えている。
【0049】
各施療子43は、それぞれ弾力性を有する板状部材から構成され、被施療部となる腕を上方から押圧する施療子(第1押圧部材)43aと、腕を下方から押圧する施療子(第2押圧部材)43bと、を有している。
施療子43a,43bが腕を上下方向から挟みこんだ場合、腕からの反作用によって、各施療子43の互いに対向する面が弾性変形される。このように、各施療子43を腕の外周面に沿って当接させることができる。
【0050】
各支持板42は、それぞれ、間隔調整部48を収容するために後方内部に形成された収容部42a(図10参照)と、収容部42aの上部を所定の長さで開口させた開口部42b(図10参照)と、左右両側面から収容部42aに向けて貫通させた左右の貫通孔(図示省略)と、収容部42aの中心部に設けられた仕切板42c(図10参照)と、前方部において上下面を貫通させた長方形の角孔42d(図11参照)と、支持板42の角孔42d側の内面の左右両端に形成された付勢手段46を支持するための支持凹部42e(図11参照)と、往復移動における上下動を規制するために前方部の左右両端部から突出させた規制軸42f(図11参照)と、を備えている。
【0051】
間隔調整部48は、図10に示すように、左右の各軸部48aと、軸部48aの一方の端部を上方に突出させたつまみ48bと、軸部48aを左右方向に付勢するためのバネ48cと、を有している。
各軸部48aは、一方端となるつまみ48bを互いに対向させる状態で収容部42aに収容され、各軸部48aと仕切板42cとの間にはバネ48cが配置されている。
また、各軸部48aの他方端が支持板42の左右両側面の前記貫通孔に挿通されている。さらに、つまみ48bの上部が収容部42aの開口部42bから突出している。
【0052】
この場合、バネ48cが各軸部48aを左右方向外側に付勢するので、各軸部48aの前記他方端が支持板42の前記貫通孔から外側に突出されて、各回動部41のガイド部45に収容される。
また、各軸部48aのつまみ48bを互いに近接させ、バネ48cを収縮させることによって、各軸部48aの前記他方端が内側に引き戻されるので、各軸部48aの前記他方端が各回動部41のガイド部45から引き出される。
【0053】
各回動部41は、それぞれ長板状の部材からなり、互いに対向する内側の面において、ガイド部45を有している。
ガイド部45は、図10に示すように、回動部41の長さ方向に複数の間隔調整軸受45aを有しており、各回動部41の間隔調整軸受45aに間隔調整部48の各軸部48aの先端部が収容されている。
この場合、間隔調整軸受45aは、後述する移動規制部47の有する複数の規制溝47aに対応して設けられている。間隔調整軸受45aの選択では、被施療部となる腕の太さに合わせて規制溝47aが選択され、その選択によって、間隔調整軸受45aが決定されることになる。
【0054】
さらに、各回動部41の回動により、各間隔調整軸受45aが各軸部48aに対して前後方向の押圧力を与える。つまり、各支持板42がガイド部45から前後方向に往復移動するための駆動力を与えられる。
【0055】
付勢手段46は、図11に示すように、略長方形の箱型からなる外枠部46aと、外枠部46aに収容され施療子43を付勢するための1つ以上のバネ46bと、施療子43を支持する支持部46cと、を有している。
先ず、上側の支持板42に支持される付勢手段46について詳しく説明する
外枠部46aは、上板部の左右両端部に左右方向に突出する軸部46dと、下板部に開口部46eと、を有している。
外枠部46aの上板部が角孔42dに挿入され、軸部46dが角孔42dの左右両側に位置する支持凹部42eに枢着されている。これによって、外枠部46aが角孔42d内の所定の範囲内で回動できるので、被施療部となる腕の前後方向の外周面に沿って施療子43の当接面の向きを変えることができる。
【0056】
外枠部46aの上板部の内側には、バネ46bの一方端が固定され、他方端が支持部46cの上面部に取り付けられている。
支持部46cは、板状部材からなり、上部に鍔部を有し、この鍔部が外枠部46aに収容され、下部が開口部46eから突出されている。
この場合、前記鍔部を有する上部は、開口部46eよりも大きい面積を有しており、開口部46eでは、前記鍔部を有する上部が外枠部46aに係止されるので、支持部46cがバネ46bの付勢力によって外枠部46aから抜け落ちることはない。
また、被施療部となる腕の太さに合わせてバネ46bが伸縮し、支持部46cがバネ46bに付勢され、支持部46cに支持された施療子43が腕の外周面に当接される。
【0057】
次に、下側の支持板42に支持される付勢手段46について説明する。
基本的には、上側の支持板42に支持された付勢手段46と比べると、上下方向の向きが異なる以外は同じ構造となっている。
このようにして、各付勢手段46により各施療子43が上下方向から中心に向かって付勢されるので、各施療子43の対向間隔が腕の太さに合わせて調整されることになる。また、このバネからなる各付勢手段46で各施療子43が上下方向外側への移動も自在になるので、腕の太さに関わらず腕の外周面に沿った往復移動が行える。これによって、各施療子43が腕に対して常時当接し、一定の押圧刺激を常時付与することができる。
【0058】
移動規制部47は、各支持板42を前後方向に移動させる上下方向に複数の規制溝47aを有し、規制溝47aに支持板42の左右の規制軸42fの先端部が収容され、左右の規制軸42fが前後方向に摺動自在に支持されている。
また、被施療部となる腕の太さに合わせて、規制溝47aを選択することができ、これによって、各支持板42の対向間隔を調整することができる。
【0059】
また、規制溝47aが規制軸42fの上下方向の移動を規制するので、ガイド部45から離れた各支持板42の前方部が近接し過ぎて、施療子43a,43bの腕への押圧刺激が強過ぎたり、若しくは、各支持板42の前方部が離反し過ぎて、施療子43a,43bが腕に対して押圧できなくなるようなことがなくなる。
なお、移動規制部47の前後上下方向の中央部には、回動軸44を隙間を有して挿通するための貫通孔が設けられている。
【0060】
回動軸44は、その一方端を回動部41の中心部に固着され、他方端が収容部11の支持部11cに回動自在に支持されている。
そして、駆動装置28のモータ29の正逆方向の回転駆動力が各回動軸44及び各回動部41を回動させ、さらに、各支持板42及び各施療子43を往復移動させる。
駆動装置28のその他の点については、図2乃至図5の腕用マッサージ機7と異なるところはないので、詳細な説明は省略する。
【0061】
図12は、第2実施形態に係る腕用マッサージ機7のさすりのマッサージ動作を示している。
図12(a)は、矢印Xで示すように、各回動部41が後方側に回転した状態である。
この場合、付勢手段46によって、施療子43a,43bが上下方向から腕を挟みこみ、また、施療子43a,43bが腕の外周面に沿って当接されている。このとき、施療子43a,43bの当接された範囲において一定の押圧刺激が腕に与えられている。
図12(b)は、矢印Xで示すように、各回動部41が前方側に回転した状態である。
この場合も、付勢手段46によって、施療子43a,43bが上下方向から腕を挟みこみ、また、施療子43a,43bが腕の外周面に沿って当接されている。そして、施療子43a,43bの当接された範囲において一定の押圧刺激が腕に与えられている。
【0062】
しかも、図12(a)の状態から図12(b)の状態への移動において、施療子43a,43bは、付勢手段46に付勢されたままの状態で腕の外周面に沿って移動をする、言い換えると、施療子43a,43bが腕に常時当接し、一定の押圧刺激を常時付与しながら移動をする。
このようにして、施療子43a,43bによって腕の外周面がさすられることになる。
さらに、この移動を繰り返すことによって、さすりのマッサージ動作となる。
【0063】
図13及び図14は、各施療子43の対向間隔を調整するための手順を説明する説明図である。
この図13及び図14を参照しつつ、第2実施形態に係る腕用マッサージ機7の対の施療子43の対向間隔を調整するための手順を説明する。
【0064】
まず、図13(a)に示すように、腕用マッサージ機7のカバー部12を開けた状態にする。そして、左右各軸部48aの各つまみ48bを指で摘まんで、各つまみ48bを互いに近接させ、支持板42から外側に突出した各軸部48aの先端部を内側に引き戻す。
これによって、各軸部48aの前記先端部が各回動部41のガイド部45の間隔調整軸受45aから引き出され、支持板42が前後方向に移動自在になり、支持板42の取り外しができる。
【0065】
次に、図13(b)の状態から、図14(a)に示すように、各つまみ48b(図示省略)を指で摘まんだまま支持板42を前方向に移動させる。
そして、図14(b)に示すように、支持板42の規制軸42fを支持する移動規制部47の規制溝47aを変えて、支持板42を前方向から後方に移動させる。このとき、各つまみ48b(図示省略)を指で摘まんだまま支持板42を移動させ、選択した規制溝47aに対応するガイド部45の間隔調整軸受45aの位置で各つまみ48b(図示省略)を放し、各軸部48aの前記先端部をガイド部45の間隔調整軸受45aに収容する。これによって、支持板42が各回動部41に取り付けられる。
【0066】
このようにして、被施療部となる腕の太さに合わせて、各施療子43の対向間隔を調整することができる。
また、図13及び図14では、各施療子43のうち上側の施療子43aのみを移動させて当該対向間隔を調整する方法について説明しているが、下側の施療子43bを移動させて当該対向間隔を調整することもできる。
この場合、上側の施療子43aを一度取り外してから、下側の施療子43bを上記手順と同じ方法で移動させることになる。その他の点については、異なるところはないので詳細な説明は省略する。
【0067】
各施療子43の対向間隔を調整するこの手順によれば、移動規制部47の規制溝47a及びガイド部45の間隔調整軸受45aを変えるだけで良いので、簡単な構造で各施療子43の対向間隔を調整することができる。
しかも、支持板42の取り外し、取り付けが片手で容易に行えるので、取扱いがし易いという利点もある。
【0068】
上記の図8乃至図14では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、右腕の腕用マッサージ機7が腕を上下方向から挟みこむ施療子43a,43bを有しているのに対し、左右の脚用マッサージ機6では、脚を左右方向から挟みこむ施療子43a,43bを有し、脚の左右両側からさすりのマッサージを施すことになる点と、これに伴い上下両側から駆動力を与える構造を有している点と、が異なる。
その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0069】
図15は、第2実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図15に示すように、制御回路30は、制御部31と、リモコン32と、駆動装置28と、から構成されている。
【0070】
以上のように、第2実施形態に係る腕用マッサージ機では、対向配置された対の施療子が被施療部を上下方向から挟みこみ、この対の施療子を共に往復移動させることができる。これによって、被施療部の上下両側からさすることができるので、効率的にさすりのマッサージを施すことができる。
また、伸縮自在な付勢手段によって対の施療子が被施療部を上下方向から挟みこみ、被施療部に常時当接することができる。これにより、対の施療子が上下両側から被施療部を一定の押圧刺激で常時さすることができるので、被施療者は、良好なさすりのマッサージ効果を得ることができる。
さらに、被施療部を上下方向から挟みこむ対の施療子の対向間隔を調整することができ、被施療部となる腕の太さに関わらず対の施療子が一定の押圧刺激でさすることができる。このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
【0071】
図16乃至図19は、本発明に係るマッサージ機の第3実施形態を示している。
図16乃至図19に示す右腕の腕用マッサージ機7は、上述のマッサージ機構20と、マッサージ機構20を被施療部となる腕の周方向に回動させる(第1方向を変化させる)ギア機構を有する押圧方向調整部70と、被施療部となる腕の周方向に回動可能にするためにマッサージ機構20と押圧方向調整部70とを収容する外枠体60と、を備えている。
【0072】
先ず、外枠体60について説明すると、外枠体60は、マッサージ機構20を収容する上部及び前後方向を開口した収容部61と、収容部61及び収容されたマッサージ機構20の上方を覆うカバー部62と、押圧方向調整部70を収容し肘掛け部5に取り付けるための取付部64と、を有している。
【0073】
収容部61は、底部61aと、底部61aの左右両端から上方に突出する左右両側部61bと、を有している。
この底部61aと左右両側部61bの連続する外周面は、前方から見て、下方を円弧とする半円形状を有し、さらに、この半円形状の中心部分に矩形の凹部形状を有している。この矩形の凹部形状は、底部61aと左右両側部61bに囲まれた部分を示している。
つまり、収容部61は、前後方向の半円柱形状からなり、この半円柱形状の半円の中心部分に凹部を有し、この凹部が前後方向を開口している。
【0074】
また、底部61aは、前記凹部の下部に直方体の横の内部空間を有し、左右両側部61bは、前記凹部の左右両側にそれぞれ直方体の縦の内部空間を有しており、底部61aの内部空間に左右両側部61bの内部空間が連続している。
この連続する底部61aの内部空間と左右両側部61bの内部空間が、マッサージ機構20に駆動力を与えるための駆動装置28を収容する駆動室63を構成している。
左右両側部61bの内部空間内には、軸受からなる支持部61cが設けられている。マッサージ機構20は、左右の支持部61cに支持され、底部61aと左右両側部61bに囲まれた内側に収容されている。
【0075】
また、収容部61の外周部には、周方向の帯状の空間を有する移動規制領域65が設けられている。
移動規制領域65は、図18に示すように、収容部61の前後方向中央部の外周部において、左側端部付近から取付部64の右側端部と対向する位置付近に亘って形成されている。また、移動規制領域65は、図17で示すように、帯状の空間の幅方向の中央部を周方向に沿って開口する孔部65aを有し、孔部65aに後述する移動規制部材66を挿通させている。
【0076】
カバー部62は、前後方向の半円柱形状からなり、この半円柱形状の半円の中心部分に凹部を有し、この凹部が前後方向を開口している。
また、カバー部62は、収容部61の左側部の上面に蝶番62aによって接続され、カバー部62を閉じる場合には、止め具(図示省略)によって収容部61に固定される。
カバー部62が閉じられた状態では、収容部61とカバー部62は、前後方向の円柱形状となり、さらに、この円柱の円の中心部分に前後方向を開口する直方体の空間を有している。
【0077】
取付部64は、図示しないが、外枠体60を肘掛け部5の前後方向に移動させるためのガイド部と、外枠体60を肘掛け部5に固定するための固定具と、を備え、ガイドレール5cに沿って前後方向に移動自在に取り付けられ、所望する位置で固定されている。
また、取付部64は、収容部61とカバー部62の外周面に対向し当該外周面の円形と同心円の凹部形状を有する上面64aと、上面64aに立設する移動規制部材66と、を有している。
【0078】
移動規制部材66は、上面64aに立設する支持軸66aと、支持軸66aの先端に取り付けられた棒状の規制部66bと、を有し、上面64aの前後方向中央部において、凹部の中央部と右端部に設けられている。図17において、支持軸66aが実線で示され、規制部66bが隠れ線で示されている。
支持軸66aが孔部65aに挿通され、規制部66bが移動規制領域65に摺動自在に収容されている。
これによって、収容部61は、移動規制領域65の範囲において、取付部64の上面64aで回動することが可能となる。
また、収容部61は、移動規制部材66によって支持されるだけでなく、径方向に係止されている。
【0079】
次に、上述のマッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備え、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0080】
次に、押圧方向調整部70について説明すると、押圧方向調整部70は、収容部61を周方向に回動させる(第1方向を変化させる)取付部64に設置されたピニオン72と、ピニオン72に噛合する収容部61の外周面に設けられたギア73と、ピニオン72を駆動する押圧方向調整駆動部74と、収容部61の回動位置を検出する検出部75と、を備えている。
ピニオン72は、ギア73と噛合するギア72aを外周面に有し、取付部64の左右方向中央及び前方部に設置されている。そして、ピニオン72の大部分が取付部64の内部に収容され、一部が上面64aから突出されている。
【0081】
ギア73は、収容部61の外周面の前方部において、左側端部付近から中央部分に亘って帯状に形成されている。また、収容部61の周方向の回動では、ギア73がピニオン72と噛合する状態が保たれている。
押圧方向調整駆動部74は、正逆方向の回転駆動力を有するモータ74aを備えている。この正逆方向の回転駆動力がベルト(図示省略)によってピニオン72に伝達される。これによって、ピニオン72及びギア73が回動し、収容部61を周方向に回動させることができる。
この場合、収容部61の周方向の回動範囲は、収容部61の外周面に形成されたギア73の周方向の範囲に限定される。
【0082】
検出部75は、図16に示すように、近接スイッチ75aを有し、近接スイッチ75aが収容部61及び取付部64に埋め込まれている。
取付部64では、上面64aの前方部において、左右側端部の二箇所に近接スイッチ75aが埋め込まれている。また、収容部61では、取付部64に埋め込まれた近接スイッチ75aに対向する位置に埋め込まれている。このとき、収容部61に埋め込まれたそれぞれの近接スイッチ75aを通る径方向の直線が交わる角度が90度に設定されている。
【0083】
この場合、収容部61の周方向の回転において、収容部61及び取付部64に埋め込まれた何れかの近接スイッチ75aが径方向で対向する位置になった際、近接スイッチ75aは、収容部61の回動位置を検出し、その検出結果に応じた信号を制御部31(図20参照)に信号を伝達する。
この場合、制御部31は、近接スイッチ75aからの信号を受けて、押圧方向調整駆動部74の回転駆動力を逆方向に変換する。これによって、ピニオン72及びギア73が逆回転し、収容部61が周方向に逆回転する。このようにして、収容部61が周方向に回動することになる。
【0084】
上記の図16乃至図19では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、左右の脚用マッサージ機6は、肘掛本体部5aでなく脚載本体部4bに取付けるので、取り付けるための構造が腕用マッサージ機7と異なるが、その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0085】
図20は、第3実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図20に示すように、制御回路30は、制御部31と、リモコン32と、検出部75と、駆動装置28と、押圧方向調整駆動部74と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、から構成されている。
電磁弁35は、左右の腕用マッサージ機7の有するエアセル23a,23bに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0086】
以上のように、第3実施形態に係る腕用マッサージ機では、対向配置された対のエアセルを被施療部の周方向に回動させることができるので、対のエアセルが被施療部を上下方向だけでなく左右方向から挟みこみことができ、被施療部の上下の部位に加え左右の部位に対してもさすることができる。
この場合、対向配置された対のエアセルの回動中心が被施療部の中心にあるので、被施療部を移動させる必要が無く、より効率的にさすりのマッサージを施すことができる。
このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
【0087】
図21乃至図23は、本発明に係るマッサージ機の第4実施形態を示している。
図21乃至図23に示す右腕の腕用マッサージ機7は、上述のマッサージ機構20と、上述の外枠体10にさらにマッサージ機構20を横転させる(第1方向を変化させる)回転機構などを設けた外枠体80と、を備え、この回転機構によって、被施療部を左右方向から挟みこみ被施療部の左右両側からさすりのマッサージを施すことができる。
【0088】
先ず、外枠体80について説明すると、外枠体80は、上述の外枠体10と、マッサージ機構20を横転させる(第1方向を変化させる)回転機構を有する押圧方向調整部81と、を備えている。
外枠体10は、マッサージ機構20を収容する上部を開口した収容部11と、収容部11及び収容されたマッサージ機構20の上方を覆うカバー部12と、肘掛け部5に取り付けるための取付部14と、を有し、収容部11及び取付部14に押圧方向調整部81が設けられている。
そして、押圧方向調整部81によって、収容部11、カバー部12、及び、収容部11に収容されたマッサージ機構20とが横に回転することができる。
【0089】
すなわち、第1実施形態における収容部11と取付部14とは一体型であるのに対して、第4実施形態においては、図21乃至図23に示すように、収容部11と取付部14とは分離されており、押圧方向調整部81によって接続されている。
その他の点については、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0090】
押圧方向調整部81は、収容部11の底部11aの左端部から下方に突出する回転部82と、回転部82を所定の範囲内で回転自在に支持し取付部14の上部に設けられた回転支持部83と、収容部11を左側に回転させるための駆動力を与える押圧方向調整駆動部84と、収容部11を回転前の状態に戻す引戻し部材85と、を備えている。
【0091】
回転部82は、前方から見て、円形の突出部82aを有し、突出部82aに孔部82bが形成されている。
回転支持部83は、前方から見て、左側を開口する略半円状かつ前後方向に長くなる凹部を有する回転台83aと、回転台83aに取り付けられ前記凹部に配置された前後方向の回転軸83bと、回転軸83bの下方の左側端部に設けられた係止部83cと、を有している。
回転軸83bは、回転部82の孔部82bに回動自在に挿通されている。
【0092】
係止部83cは、回転支持部83の左側端部を水平方向に突出させた突出部を有している。このため、回転部82の左回転では、係止部83cが回転部82に当接することになる。つまり、回転部82の回転が係止部83cによって停止されることになる。また、係止部83cは、回転部82を当接した状態で支持することができる。
【0093】
押圧方向調整駆動部84は、蛇腹状のエアセル84aと、空気を給排するための空気配管84bと、を有している。
蛇腹状のエアセル84aの一方端が収容部11の底部11aに接続され、他方端が回転支持部83の回転台83aに接続されている。
エアセル84aに空気を供給することによって、エアセル84aがその左側端部を支点とする扇状に膨張する。このため、収容部11の底部11aの右側端部が押し上げられ、収容部11及びマッサージ機構20が左側に回転させられる。
また、空気を排気したエアセル84aは、収縮し、薄く重ねられた状態になる。
【0094】
空気配管84bは、回転台83aの孔部(図示省略)に挿通され、取付部14から肘掛け部5の下方に引き回され(図示省略)、座部2の下方に配置された空気給排装置36(図24参照)に接続されている。
引戻し部材85は、バネ85aを有し、前後方向でのエアセル84aの前後において、バネ85aの一方が収容部11の底部11aに接続され、他方が回転支持部83の回転台83aに接続されている。
【0095】
エアセル84aへの空気の供給で収容部11及びマッサージ機構20が左側に回転した際、係止部83cで当該回転が停止され、また、収容部11及びマッサージ機構20が横転した状態で係止部83cに支持される。
さらに、エアセル84aの空気を排気した際には、収縮したエアセル84aと引戻し部材85のバネ85aにより、収容部11及びマッサージ機構20がエアセル84aに空気を供給する前の状態に引き戻される。
【0096】
次に、マッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備え、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0097】
この場合、マッサージ機構20は、この横転した状態においても問題無くマッサージを行うことができる。
また、図16乃至図19に示す第3実施形態に係る腕用マッサージ機7は、被施療部となる腕を中心としてマッサージ機構20が回転しているので、腕を移動させる必要がないのに対して、図21乃至図23に示す腕用マッサージ機7は、マッサージ機構20を横転させるので、マッサージ機構20が横に移動してしまう。このため、マッサージ機構20の移動分、腕を移動させる必要がある。
【0098】
上記の図21乃至図23では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、左右の脚用マッサージ機6は、肘掛本体部5aでなく脚載本体部4bに取付けるので、取り付けるための構造が腕用マッサージ機7と異なるが、その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0099】
図24は、第4実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図24に示すように、制御回路30は、制御部31と、リモコン32と、駆動装置28と、押圧方向調整駆動部84と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、エアセル84aと、から構成されている。
電磁弁35は、左右の腕用マッサージ機7の有するエアセル23及びエアセル84aに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0100】
以上のように、第4実施形態に係る腕用マッサージ機では、対向配置された対のエアセルが上下方向だけでなく左右方向からも被施療部を挟みこむことができるので、被施療部の上下の部位に加え左右の部位に対してもさすることができるようになる。このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
また、第4実施形態の押圧方向調整部が蛇腹状のエアセルを有する回転機構を利用しているので、第3実施形態の押圧方向調整部がギア機構を利用しているのと比べて、簡単な構造でマッサージを施す被施療部の部位の位置を変えることができる。
もっとも、第4実施形態の回転機構では、対向配置された対のエアセルの回転中心が被施療部の外側にあるので、当該回転において被施療部の移動が伴うことになる。
【0101】
図25及び図26は、本発明に係るマッサージ機の第5実施形態を示している。
図25及び図26に示す右腕の腕用マッサージ機7は、上述のマッサージ機構20と、マッサージ機構20を収容し腕の長手方向となる前後方向に移動可能となる(第2方向へ位置変更する)外枠体90と、外枠体90を移動させさすり位置を変更するさすり範囲調整部100と、を備えている。
【0102】
先ず、外枠体90について説明すると、外枠体90は、マッサージ機構20を収容する上部及び前後方向を開口した収容部91と、収容部91及び収容されたマッサージ機構20の上方を覆うカバー部(図示省略)と、を有している。
【0103】
収容部91は、肘掛本体部5aに設置される底部91aと、底部91aの左右両端から上方に突出する左右両側部91bと、を有している。
底部91aは、その内部に空間を有し、左右両側部91bは、それぞれの内部に空間を有しており、底部91aの内部空間に左右両側部91bの内部空間が連続している。
そして、この連続する底部91aの内部空間と左右両側部91bの内部空間が、マッサージ機構20に駆動力を与えるための駆動装置28及び後述する移動機構104の位置変更用駆動部106を収容する駆動室93を構成している。
また、左右両側部91bの内部空間内には、軸受からなる支持部91cが設けられている。マッサージ機構20は、左右の支持部91cに支持され、底部91aと左右両側部91bに囲まれた内側に収容されている。
カバー部(図示省略)は、収容部91の上面に蝶番によって接続される。
【0104】
さすり範囲調整部100は、肘掛本体部5aに設置されるガイド部101と、収容部91の前後方向の移動をガイドするガイド溝102と、収容部91の前後方向の移動を所定範囲に規制する係止部103と、収容部91及びマッサージ機構20を前後方向に移動させる(第2方向へ位置変更させる)移動機構104と、を備えている。
ガイド部101は、底部101aと、底部101aの左右両端から上方に突出する左右両側部101bと、を有している。
また、ガイド部101は、肘掛け部5の前後方向の長さと略同じ長さ寸法を有し、底部101aに設けられた取付部(図示省略)によって、肘掛本体部5aに取り付けられている。底部101aと左右両側部101bに囲まれた内側には、収容部91が前後方向に移動自在に収容されている。
【0105】
底部101aの上面には、前後方向のガイド溝102が形成されている。
係止部103は、下部の支持軸103aと、上部の突出部103bと、を有し、ガイド溝102の前後方向の両端部に配置されている。
支持軸103aは、ガイド溝102に挿入され、突出部103bは、ガイド溝102から突出し、支持軸103aがガイド溝102に固定されている。
また、係止部103は、後述する検出部107による収容部91の移動方向の変更ができなかった場合に、係止部103の突出部103bを収容部91に当接させることによって、収容部91の移動を止めることができる。
【0106】
移動機構104は、収容部91の底部91aに回転可能に取り付けられたローラー105と、ローラー105に回転駆動力を与える位置変更用駆動部106と、収容部91の移動位置を検出する検出部107と、を備えている。
ローラー105は、収容部91の底部91aの左右及び前後にそれぞれ取り付けられ、ガイド溝102に嵌め込まれている。
位置変更用駆動部106は、正逆方向の回転駆動力を有するモータ106aを備え、駆動室93に収容されている。この正逆方向の回転駆動力がベルト(図示省略)によってローラー105に伝達される。これによって、ローラー105が回転し、ガイド溝102に沿って前後方向に移動するので、収容部91を前後方向に移動させることができる。
【0107】
検出部107は、近接スイッチ107aを有し、近接スイッチ107aが収容部91の底部91aの前後方向両端部と、ガイド部101の底部101aの前後方向両端部において係止部103の位置から中央よりの位置にそれぞれ埋め込まれている。
また、収容部91が移動によってガイド部101の前後方向両端部付近に達した際、収容部91の近接スイッチ107aとガイド部101の近接スイッチ107aとが上下方向で対向となる。
【0108】
この場合、収容部91の移動によって収容部91の近接スイッチ107aとさすり範囲調整部100の近接スイッチ107aが上下方向で対向する位置になった際、近接スイッチ107aは、収容部91の位置を検出し、その検出結果に応じた信号を制御部31(図28参照)に信号を伝達する。
この場合、制御部31は、近接スイッチ107aからの信号を受けて、位置変更用駆動部106の回転駆動力を逆方向に変換する。これによって、ローラー105が逆回転し、収容部91が逆方向に向かって移動する。このようにして、収容部91が前後方向に移動することになる。
【0109】
次に、マッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備え、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0110】
図27は、腕用マッサージ機7のさすりのマッサージ動作を示している。
この場合、エアセル23a,23b往復移動の動きを矢印Xで示し、マッサージ機構20の移動を矢印Yで示している。
図27(a)は、矢印Yで示すように、マッサージ機構20が後方から前方に移動している(第2方向へ位置変更する)状態である。
【0111】
この場合、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、マッサージ機構20が後方から前方に移動している間に、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、前後方向の往復移動を繰り返している。
エアセル23aが前方への移動から後方への移動、そしてまた前方への移動へと移動方向を変えている。また、エアセル23bは、エアセル23aとは逆の方向となり、後方への移動から前方への移動、そしてまた後方への移動へと移動方向を変えている。
【0112】
図27(b)は、矢印Xで示すように、マッサージ機構20が前方から後方に移動している(第2方向へ位置変更する)状態である。
この場合も、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、マッサージ機構20が前方から後方に移動している間に、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、前後方向の往復移動を繰り返している。
エアセル23aが前方への移動から後方への移動、そしてまた前方への移動へと移動方向を変えている。また、エアセル23bは、エアセル23aとは逆の方向となり、後方への移動から前方への移動、そしてまた後方への移動へと移動方向を変えている。
【0113】
このように、太さの異なる腕の前後部分においても、付勢手段26(図示省略)によって、一定の押圧刺激を腕に常時与えることができ、また、エアセル23a,23bを腕に常時当接させたままの状態で腕の外周面に沿って移動させることができる。
また、腕の前後方向に移動させながら、さすりのマッサージ動作を繰り返すことによって、より広い範囲にさすりマッサージを施すことができる。
【0114】
上記の図25乃至図27では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、左右の脚用マッサージ機6は、肘掛本体部5aでなく脚載本体部4bに取付けるので、取り付けるための構造が腕用マッサージ機7と異なるが、その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0115】
図28は、第5実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図28に示すように、制御回路30は、制御部31と、リモコン32と、検出部107と、駆動装置28と、位置変更用駆動部106と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、から構成されている。
電磁弁35は、左右の腕用マッサージ機7の有するエアセル23a,23bに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0116】
以上のように、第5実施形態に係る腕用マッサージ機では、対向配置された対のエアセルが被施療部を挟みこみ、この対のエアセルは、被施療部の長さ方向に共に一定範囲で往復移動するだけでなく、同時に被施療部の長さ方向に移動するので、被施療部の長さ方向において全体的にさすることができるようになる。このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
【0117】
図29は、本発明に係るマッサージ機の第6実施形態を示している。
図29に示す右腕の腕用マッサージ機7は、上述のマッサージ機構20と、マッサージ機構20を被施療部となる腕の周方向に回転させる(第1方向を変化させる)機構など上述の押圧方向調整部70とは異なるギア機構を有する押圧方向調整部110と、マッサージ機構20を収容し腕の長手方向となる前後方向に移動可能となる(第2方向へ位置変更する)外枠体120と、外枠体120を移動させさすり位置を変更する上述のさすり範囲調整部100と、を備えている。
【0118】
先ず、外枠体120について説明すると、外枠体120は、マッサージ機構20を収容する収容部121と、腕の周方向に回転する収容部121を支持する回転支持部122と、を有している。
【0119】
収容部121は、前後方向の円柱形状を有し、この円柱の円の中心部分に前後方向を開口する直方体の空間を有している。この直方体の空間には、マッサージ機構20が収容されている。
また、収容部121の内部には、マッサージ機20の駆動装置を収容する駆動室(図示省略)が設けられている。
回転支持部122は、直方体の形状を有し、その左右上下方向の中央部に前後方向を開口する円筒空間を有している。そして、回転支持部122の円筒空間に収容部121が回転可能に収容されている。
【0120】
さすり範囲調整部100は、肘掛本体部5aに設置されるガイド部101と、収容部121の前後方向の移動をガイドするガイド溝102と、収容部121の前後方向の移動を所定範囲に規制する係止部103と、収容部121及びマッサージ機構20を前後方向に移動させる移動機構104(図示省略)と、を備えている。
また、移動機構104(図示省略)は、回転支持部122の底面に回転可能に取り付けられたローラーと、回転支持部122の内部に収容されローラーに回転駆動力を与える位置変更用駆動部と、回転支持部122の移動位置を検出する検出部と、を備えている。
さすり範囲調整部100及び移動機構104(図示省略)は、その他の点については、第5実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0121】
次に、マッサージ機構20は、上下方向に所定の間隔で対向に配置された対のエアセル23と、対のエアセル23を上下方向外側から支持する対の支持板(第1支持体)22と、対の支持板22に前後方向(第2方向)の駆動力を与え支持板22を左右両側から支持する対の回動部(第2支持体)21と、対の支持板22の互いに近接離反する方向(第1方向)に対の支持板22を移動自在に支持するために対の回動部21に形成されたガイド部25と、対の支持板22を互いに近接する方向に付勢する付勢手段26と、対の回動部21に設けられた回動軸24と、回動軸24に回動駆動力を与えるための駆動装置28と、を備え、第1実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0122】
次に、押圧方向調整部110について説明すると、押圧方向調整部110は、上述の押圧方向調整部70を備え、押圧方向調整部70のギア73が収容部121の外周面に前周に亘って形成され、検出部75の近接スイッチ75aが収容部121と回転支持部122に埋め込まれている。
収容部121と回転支持部122に埋め込まれた近接スイッチ75aは、押圧方向調整部110が停止している状態において、径方向で対向する位置に配置されている。
押圧方向調整部70は、収容部121を周方向に回動させる回転支持部122に設置されたピニオン72と、ピニオン72に噛合する収容部121の外周面に設けられたギア73と、ピニオン72を駆動する押圧方向調整駆動部74と、収容部121の回動位置を検出する検出部75と、を備え、第3実施形態と全く同じ構成になるので、詳細な説明は省略する。
【0123】
この場合、ピニオン72の回転によってギア73が回転し、収容部121が周方向に回転するので、収容部121が周方向に一回転以上できるようになる。なお、収容部121は検出部75により半周程度で正逆回動するように制御してもよい。そうすれば、エアセル23a,23bに空気を給排するための空気配管(図示省略)は短くて済む。
また、検出部75は、収容部121と回転支持部122に埋め込まれた近接スイッチ75aが径方向で対向する位置になった場合、押圧方向調整駆動部74の回転駆動力を逆方向に変えることも、押圧方向調整駆動部74の回転駆動力の方向を維持することもできる。
押圧方向調整駆動部74の回転駆動力の方向を維持した場合、押圧方向調整部110による周方向の移動と移動機構104による前後方向の移動によって、マッサージ機構20のエアセル23a,23bは、前後方向の往復移動に加えて、腕に対して螺旋状の移動を行うことができる。
【0124】
図30は、腕用マッサージ機7のさすりのマッサージ動作を示している。
この場合、エアセル23a,23b往復移動の動きを矢印Xで示し、マッサージ機構20の螺旋状の移動を矢印Zで示している。
図30(a)は、矢印Zで示すように、マッサージ機構20が後方から前方に向かって螺旋状に移動している(第1方向を変化させ、さらに第2方向へ位置変更している)状態である。
【0125】
この場合、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、マッサージ機構20が後方から前方に螺旋状に移動している間に、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、前後方向の往復移動を繰り返している。
エアセル23aが前方への移動から後方への移動、そしてまた前方への移動へと移動方向を変えている。また、エアセル23bは、エアセル23aとは逆の方向となり、後方への移動から前方への移動、そしてまた後方への移動へと移動方向を変えている。
【0126】
図30(b)は、矢印Zで示すように、マッサージ機構20が後方に向かって螺旋状に移動している(第1方向を変化させ、さらに第2方向へ位置変更している)状態である。
この場合も、付勢手段26(図示省略)によって、エアセル23a,23bが上下方向から腕を挟みこみ、また、腕の外周面に沿ってエアセル23a,23bが当接されている。そして、マッサージ機構20が前方から後方に螺旋状に移動している間に、エアセル23a,23bが当接された範囲において一定の押圧刺激を腕に与えながら、前後方向の往復移動を繰り返している。
エアセル23aが前方への移動から後方への移動、そしてまた前方への移動へと移動方向を変えている。また、エアセル23bは、エアセル23aとは逆の方向となり、後方への移動から前方への移動、そしてまた後方への移動へと移動方向を変えている。
【0127】
このように、太さの異なる腕の前後部分においても、付勢手段26(図示省略)によって、一定の押圧刺激を腕に常時与えることができ、また、エアセル23a,23bを腕に常時当接させたままの状態で腕の外周面に沿って螺旋状に移動させることができる。
また、腕の前後方向及び周方向に移動させながら、さすりのマッサージ動作を繰り返すことによって、より広い範囲にさすりマッサージを施すことができる。
【0128】
上記の図29乃至図30では、右腕の腕用マッサージ機7について説明したが、左腕の腕用マッサージ機7は、右腕の腕用マッサージ機7と全く同じ構成になり、それぞれの構成部材における左右の向きが逆になるだけなので、詳細な説明は省略する。
また、左右の脚用マッサージ機6は、肘掛本体部5aでなく脚載本体部4bに取付けるので、取り付けるための構造が腕用マッサージ機7と異なるが、その他の点については、基本的な構成が同じになるので、詳細な説明は省略する。
【0129】
図31は、第6実施形態に係る左右の腕用マッサージ機7において設けられる制御回路30の一例である。図31に示すように、制御回路30は、制御部31と、リモコン32と、検出部75と、検出部107と、駆動装置28と、押圧方向調整駆動部74と、位置変更用駆動部106と、電磁弁35と、空気給排装置36と、エアセル23a,23bと、から構成されている。
電磁弁35は、左右の腕用マッサージ機7の有するエアセル23a,23bに対して各々独立的に吸気及び排気を行うことが可能となるように個別に用意されている。
【0130】
以上のように、第6実施形態に係る腕用マッサージ機では、対向配置された対のエアセルが被施療部となる腕を挟みこみ、この対のエアセルは、被施療部の長さ方向に共に一定範囲で往復移動するだけでなく、被施療部の長さ方向に移動させながら、さらに被施療部の周方向に回転させることができるので、被施療部に対して螺旋状にさすることができるようになる。しかも、被施療部の長さ方向及び周方向において全体的にさすることができるようになる。このため、第1実施形態と比べて、被施療部に対しより広い範囲でさすりマッサージが施せるようになり、被施療者は、より良好なさすりのマッサージ効果を得ることができる。
【0131】
なお、本発明は上記実施形態に限定されるものではない。
例えば、第2実施形態では、押圧部材を板状からなる施療子43としているが、エアセル23であっても良く、他の実施形態において、エアセル23としている押圧部材を施療子43としても良い。
また、各支持板22に設けられるエアセルの配置・数は、適宜変更可能である。
さらに、押圧部材を付勢する付勢手段は、例えば、エアを用いた付勢手段26を採用することができる。エアを用いた付勢手段26では、押圧部材のエアセル23a,23bに対してエアを供給することによって、エアセル23a,23bを被施療部に常時当接させ、押圧刺激を常時付与しながらさすりのマッサージを施すことができるようになる。 このように、本発明の要旨を逸脱しない範囲において種々なる態様で実施し得る。
【図面の簡単な説明】
【0132】
【図1】本発明に係るマッサージ機の第1実施形態を具備した椅子型マッサージ装置の斜視図である。
【図2】第1実施形態に係る腕用マッサージ機のカバーを開けた状態を示す斜視図である。
【図3】第1実施形態に係る腕用マッサージ機のカバーを閉じた状態を示す側面断面図である。
【図4】図3のA−A線断面図である。
【図5】第1実施形態に係る腕用マッサージ機の動作を示す説明図である。
【図6】第1実施形態に係る脚用マッサージ機を示す斜視図である。
【図7】第1実施形態に係る脚用マッサージ機及び腕用マッサージ機における制御ブロックを示す図である。
【図8】第2実施形態に係る腕用マッサージ機のカバーを開けた状態を示す斜視図である。
【図9】図8のB−B線断面図である。
【図10】図9のC−C線断面図である。
【図11】図9のD−D線断面図である。
【図12】第2実施形態に係る腕用マッサージ機の動作を示す説明図である。
【図13】第2実施形態に係る腕用マッサージ機の対の施療子の対向間隔を調整するための手順を説明する説明図である。
【図14】第2実施形態に係る腕用マッサージ機の対の施療子の対向間隔を調整するための次の手順を説明する説明図である。
【図15】第2実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【図16】第3実施形態に係る腕用マッサージ機のカバーを開けた状態を示す斜視図である。
【図17】第3実施形態に係る腕用マッサージ機のカバーを閉じた状態を示す側面断面図である。
【図18】図17のE−E線断面図である。
【図19】図18の腕用マッサージ機が周方向に回転した状態を示す断面図である。
【図20】第3実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【図21】第4実施形態に係る腕用マッサージ機のカバーを閉じた状態を示す側面断面図である。
【図22】図21のF−F線断面図である。
【図23】図22の腕用マッサージ機が90度横に傾けた状態を示す断面図である。
【図24】第4実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【図25】第5実施形態に係る腕用マッサージ機のカバーを開けた状態を示す斜視図である。
【図26】図25のG−G線断面図である。
【図27】第5実施形態に係る腕用マッサージ機の往復移動のさすり動作を示す説明図である。
【図28】第5実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【図29】第6実施形態に係る腕用マッサージ機の斜視図である。
【図30】第6実施形態に係る腕用マッサージ機の螺旋さすり動作を示す説明図である。
【図31】第6実施形態に係る腕用マッサージ機における制御ブロックを示す図である。
【符号の説明】
【0133】
1 椅子型マッサージ装置
4 脚載部
5 肘掛け部
6 脚用マッサージ機
7 腕用マッサージ機
10 外枠体
11 収容部
13 駆動室
14 取付部
20 マッサージ機構
21 回動部
22 支持板
23 エアセル
25 ガイド部
26 付勢手段
30 制御回路
31 制御部
32 リモコン
35 電磁弁
36 空気給排装置
40 マッサージ機構
42 支持板
43 施療子
45 ガイド部
46 付勢手段
47 移動規制部
48 間隔調整部
60 外枠体
65 移動規制領域
66 移動規制部材
70 押圧方向調整部
72 ピニオン
73 ギア
74 押圧方向調整駆動部
75a 近接スイッチ
80 外枠体
81 押圧方向調整部
84 押圧方向調整駆動部
84a エアセル
90 外枠体
100 さすり範囲調整部
101 ガイド部
104 移動機構
105 ローラー
106 位置変更用駆動部
110 押圧方向調整部
120 外枠体
【特許請求の範囲】
【請求項1】
第1押圧部材と、
前記第1押圧部材との間に被施療部を配置できるように前記第1押圧部材に対して間隔をおいて対向配置された第2押圧部材と、
前記両押圧部材を、当該両押圧部材が互いに近接離反する第1方向、及び当該第1方向に対して略直交する第2方向に、移動自在に支持する支持部材と、
前記両押圧部材が互いに近接する方向へ、前記両押圧部材を付勢する付勢手段と、
前記付勢手段によって付勢された前記両押圧部材を、それぞれ、前記第2方向に往復移動させて、前記両押圧部材によって被施療部へのさすりマッサージを行わせるためのさすり駆動装置と、
を備えていることを特徴とするマッサージ機。
【請求項2】
前記支持部材は、
前記押圧部材を支持し、かつ前記押圧部材とともに前記第1方向に移動自在に設けられた第1支持体と、
前記駆動装置によって駆動されることで、前記第1支持体を前記第2方向へ移動させるように、前記第1支持体を支持する第2支持体と、
を備え、
前記第2支持体は、前記第1支持体を、前記第1方向に移動自在に支持するためのガイド部を有している
ことを特徴とする請求項1記載のマッサージ機。
【請求項3】
前記支持部材は、前記第1押圧部材と前記第2押圧部材との対向間隔を調整自在に構成されていることを特徴とする請求項1又は2記載のマッサージ機。
【請求項4】
前記両押圧部材が互いに近接離反する前記第1方向を変化させるための押圧方向調整部を有していることを特徴とする請求項1〜3のいずれかに記載のマッサージ機。
【請求項5】
前記押圧方向調整部は、前記第1方向を変化させるための駆動力を発生する押圧方向調整駆動部と
前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記押圧方向調整駆動部を動作させて前記第1方向を変化させる制御部と、をさらに備えていることを特徴とする請求項4記載のマッサージ機。
【請求項6】
前記両押圧部材が前記さすり駆動装置によって前記第2方向へ往復移動するさすり範囲を、前記第2方向へ位置変更するためのさすり範囲調整部を備えていることを特徴とする請求項1〜5のいずれかに記載のマッサージ機。
【請求項7】
前記さすり範囲調整部は、前記第2方向へ前記さすり範囲を位置変更させるための駆動力を発生する位置変更用駆動部と、
前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記位置変更用駆動部を動作させて前記さすり範囲の位置を第2方向に変化させる制御部と、をさらに備えていることを特徴とする請求項6記載のマッサージ機。
【請求項8】
前記両押圧部材が互いに近接離反する前記第1方向を変化させるための駆動力を発生する押圧方向調整駆動部と、前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記押圧方向調整部を動作させて前記第1方向を変化させる制御部と、を備える押圧方向調整部と、
前記両押圧部材が前記さすり駆動装置によって前記第2方向へ往復移動するさすり範囲を、前記第2方向へ位置変更するための駆動力を発生する位置変更用駆動部と、
前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記位置変更用駆動部を動作させて前記さすり範囲の位置を第2方向に変化させる制御部と、を備えるさすり範囲調整部と、
を有していることを特徴とする請求項1〜3のいずれかに記載のマッサージ機。
【請求項9】
椅子型マッサージ装置に着座した被施療者の被施療部に前記さすりマッサージを施せるように、請求項1〜8のいずれかに記載のマッサージ機が設けられていることを特徴とする椅子型マッサージ装置。
【請求項1】
第1押圧部材と、
前記第1押圧部材との間に被施療部を配置できるように前記第1押圧部材に対して間隔をおいて対向配置された第2押圧部材と、
前記両押圧部材を、当該両押圧部材が互いに近接離反する第1方向、及び当該第1方向に対して略直交する第2方向に、移動自在に支持する支持部材と、
前記両押圧部材が互いに近接する方向へ、前記両押圧部材を付勢する付勢手段と、
前記付勢手段によって付勢された前記両押圧部材を、それぞれ、前記第2方向に往復移動させて、前記両押圧部材によって被施療部へのさすりマッサージを行わせるためのさすり駆動装置と、
を備えていることを特徴とするマッサージ機。
【請求項2】
前記支持部材は、
前記押圧部材を支持し、かつ前記押圧部材とともに前記第1方向に移動自在に設けられた第1支持体と、
前記駆動装置によって駆動されることで、前記第1支持体を前記第2方向へ移動させるように、前記第1支持体を支持する第2支持体と、
を備え、
前記第2支持体は、前記第1支持体を、前記第1方向に移動自在に支持するためのガイド部を有している
ことを特徴とする請求項1記載のマッサージ機。
【請求項3】
前記支持部材は、前記第1押圧部材と前記第2押圧部材との対向間隔を調整自在に構成されていることを特徴とする請求項1又は2記載のマッサージ機。
【請求項4】
前記両押圧部材が互いに近接離反する前記第1方向を変化させるための押圧方向調整部を有していることを特徴とする請求項1〜3のいずれかに記載のマッサージ機。
【請求項5】
前記押圧方向調整部は、前記第1方向を変化させるための駆動力を発生する押圧方向調整駆動部と
前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記押圧方向調整駆動部を動作させて前記第1方向を変化させる制御部と、をさらに備えていることを特徴とする請求項4記載のマッサージ機。
【請求項6】
前記両押圧部材が前記さすり駆動装置によって前記第2方向へ往復移動するさすり範囲を、前記第2方向へ位置変更するためのさすり範囲調整部を備えていることを特徴とする請求項1〜5のいずれかに記載のマッサージ機。
【請求項7】
前記さすり範囲調整部は、前記第2方向へ前記さすり範囲を位置変更させるための駆動力を発生する位置変更用駆動部と、
前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記位置変更用駆動部を動作させて前記さすり範囲の位置を第2方向に変化させる制御部と、をさらに備えていることを特徴とする請求項6記載のマッサージ機。
【請求項8】
前記両押圧部材が互いに近接離反する前記第1方向を変化させるための駆動力を発生する押圧方向調整駆動部と、前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記押圧方向調整部を動作させて前記第1方向を変化させる制御部と、を備える押圧方向調整部と、
前記両押圧部材が前記さすり駆動装置によって前記第2方向へ往復移動するさすり範囲を、前記第2方向へ位置変更するための駆動力を発生する位置変更用駆動部と、
前記さすり駆動装置を駆動させて、前記両押圧部材によって被施療部へのさすりマッサージを行いながら、前記位置変更用駆動部を動作させて前記さすり範囲の位置を第2方向に変化させる制御部と、を備えるさすり範囲調整部と、
を有していることを特徴とする請求項1〜3のいずれかに記載のマッサージ機。
【請求項9】
椅子型マッサージ装置に着座した被施療者の被施療部に前記さすりマッサージを施せるように、請求項1〜8のいずれかに記載のマッサージ機が設けられていることを特徴とする椅子型マッサージ装置。
【図1】


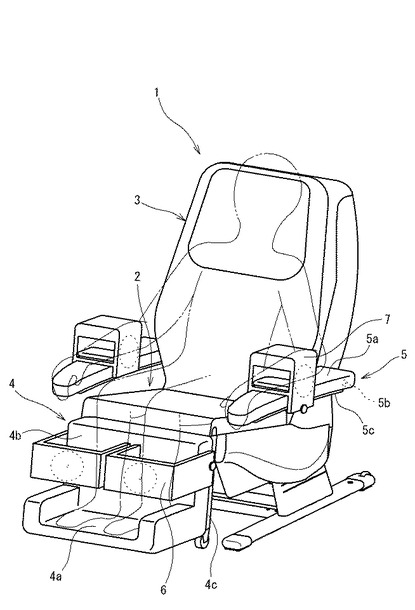
【図2】
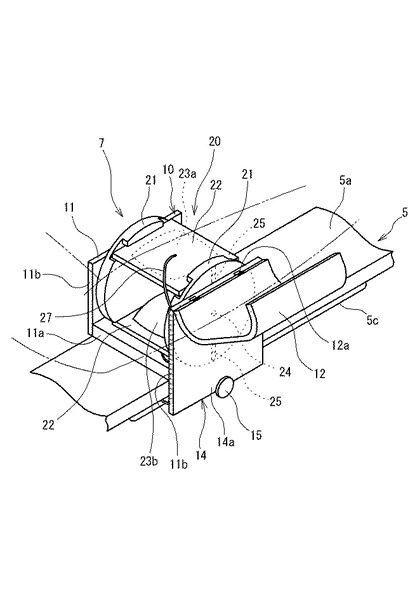
【図3】
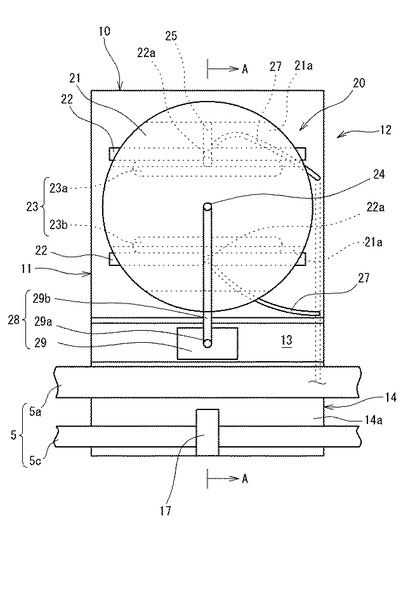
【図4】
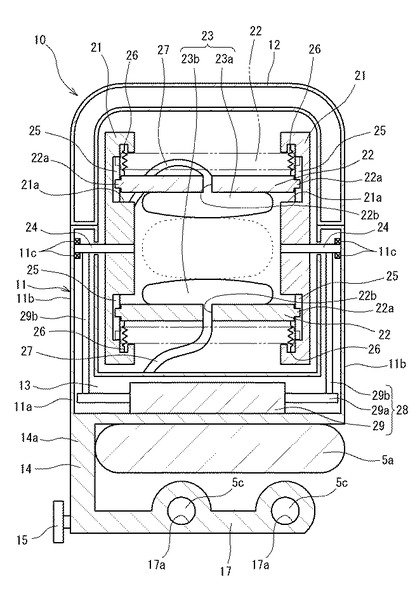
【図5】
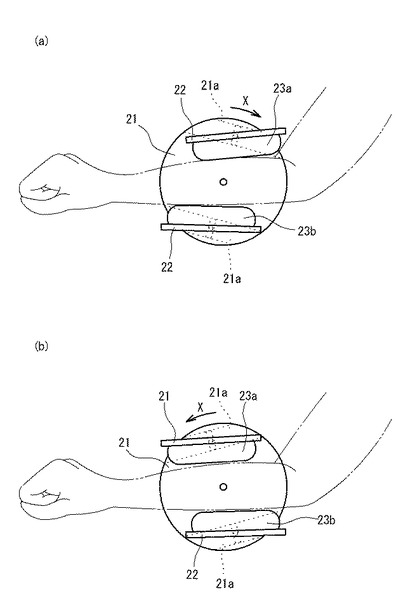
【図6】
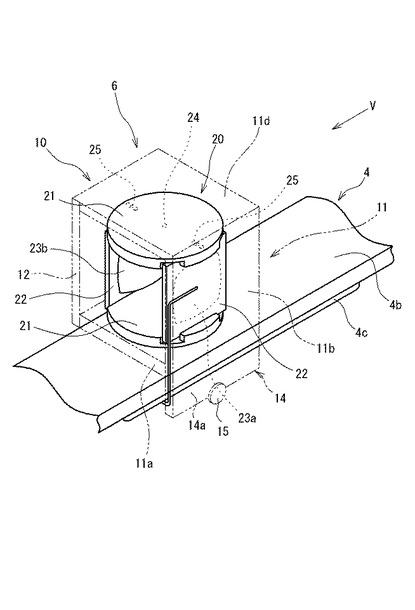
【図7】
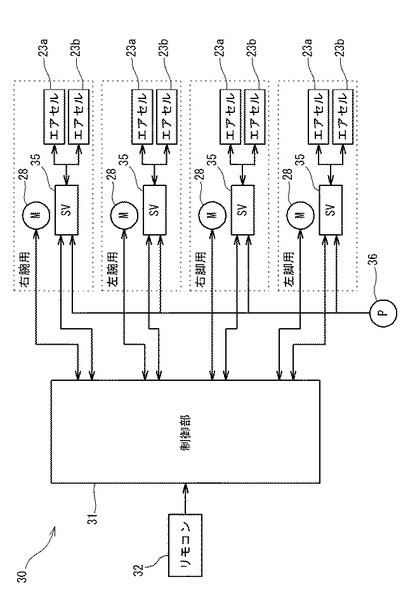
【図8】
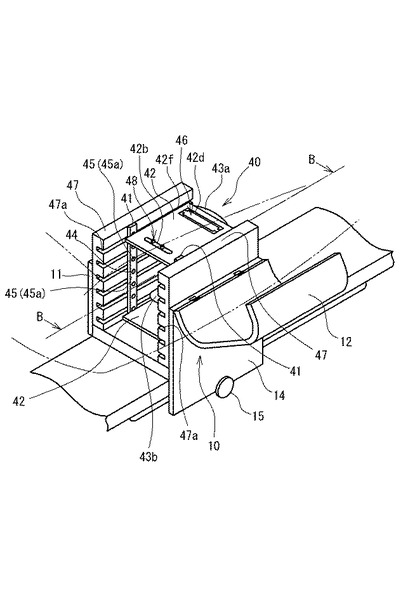
【図9】
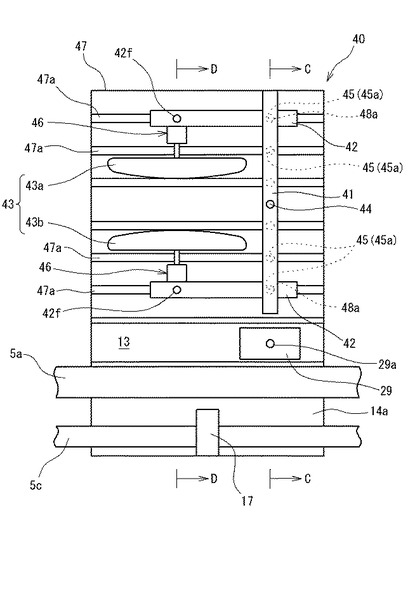
【図10】
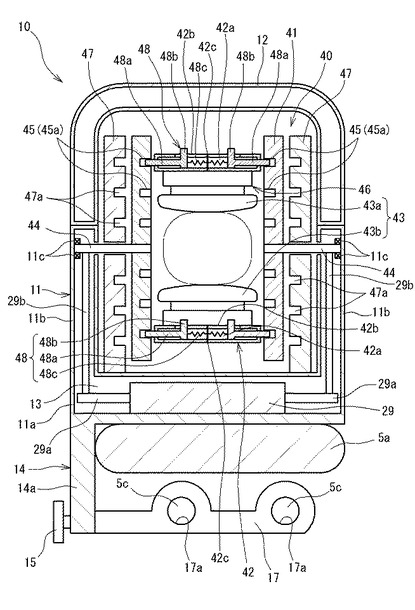
【図11】
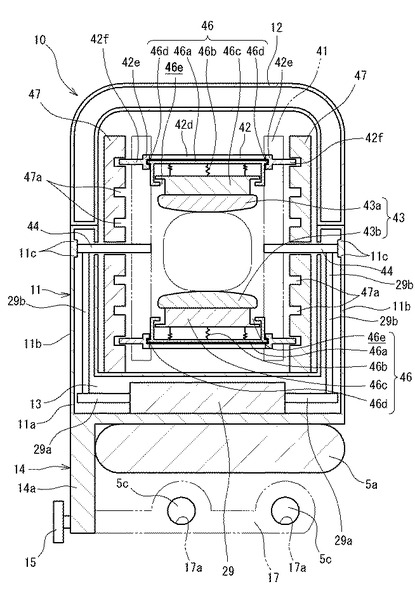
【図12】
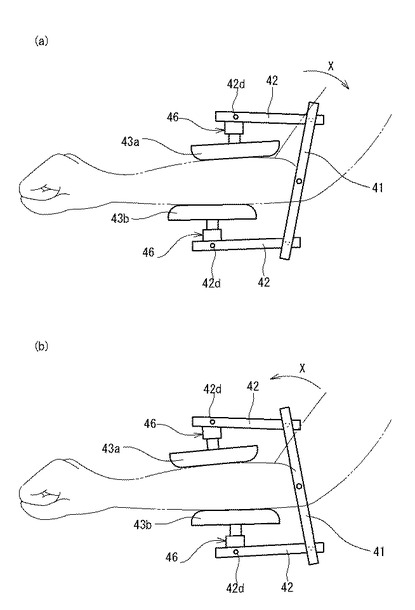
【図13】
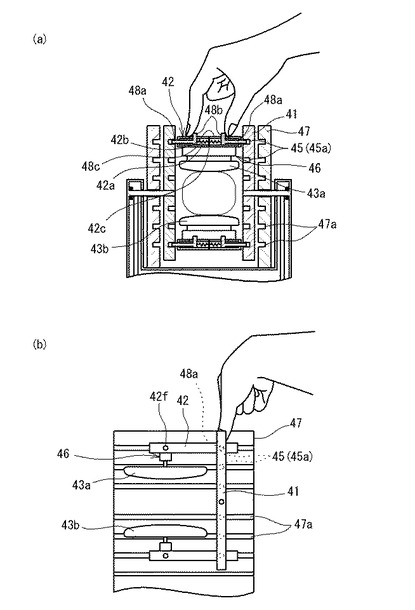
【図14】
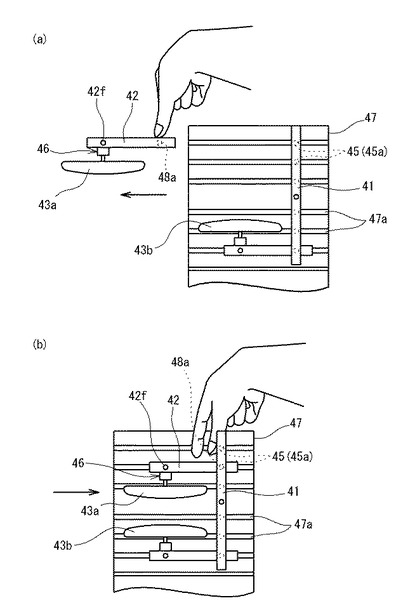
【図15】
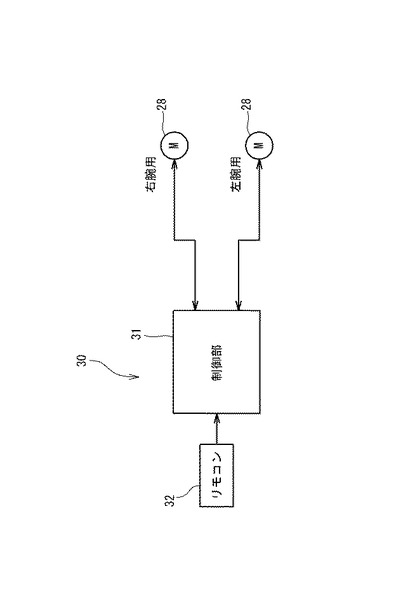
【図16】
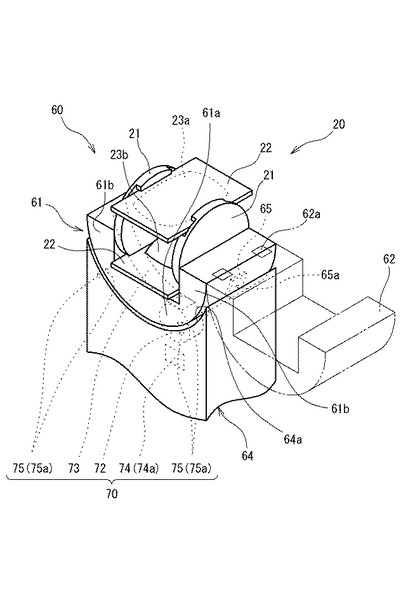
【図17】
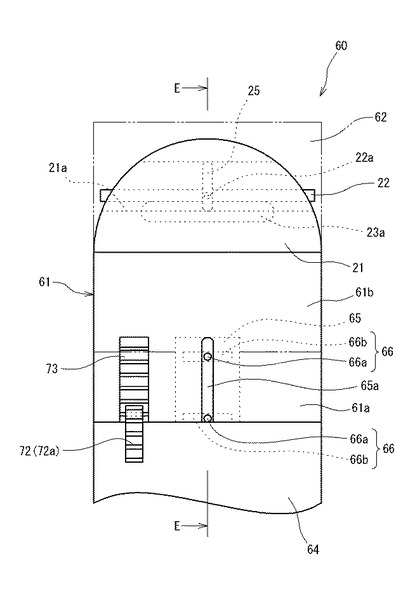
【図18】
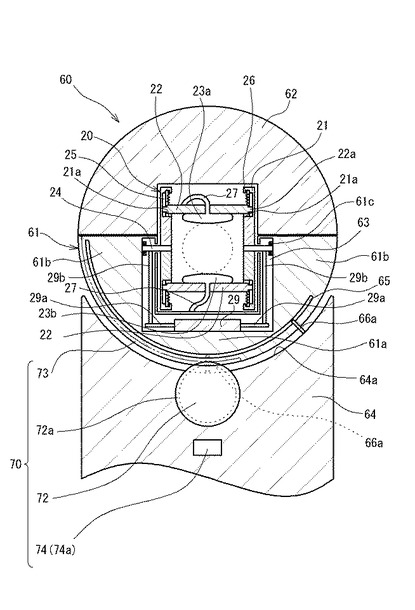
【図19】
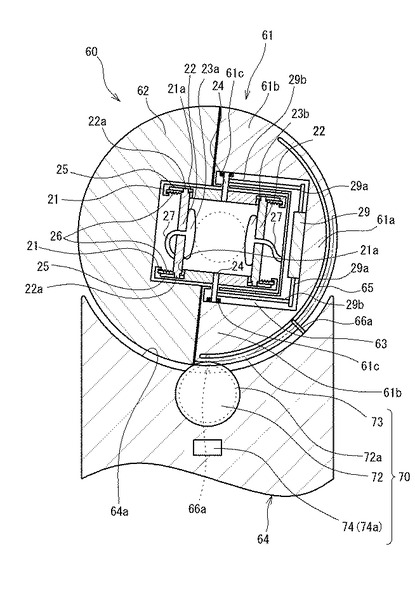
【図20】
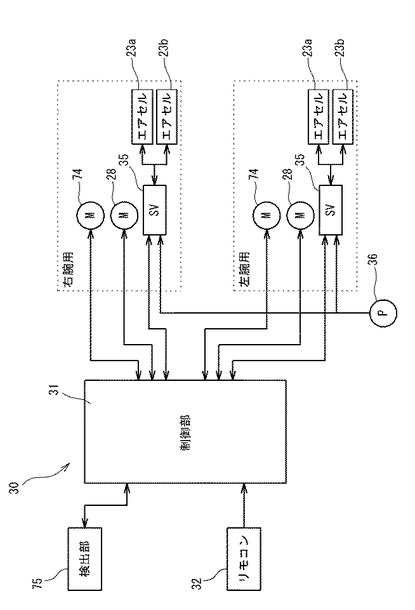
【図21】
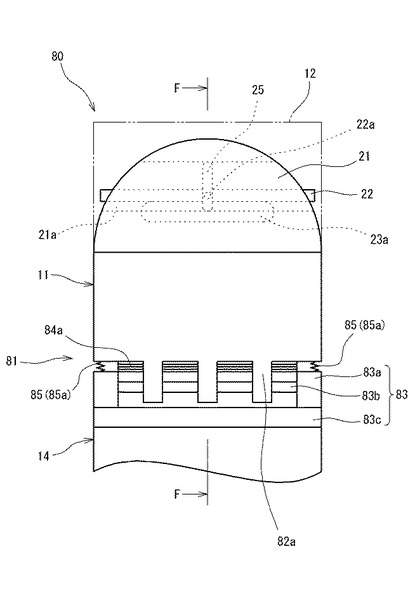
【図22】
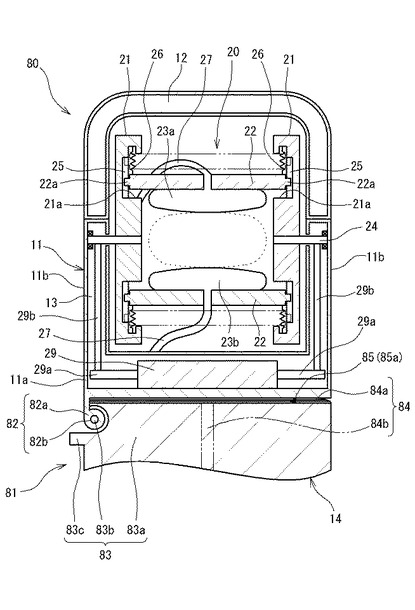
【図23】
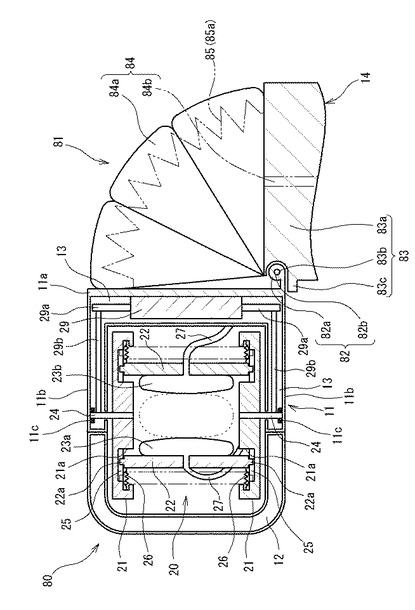
【図24】
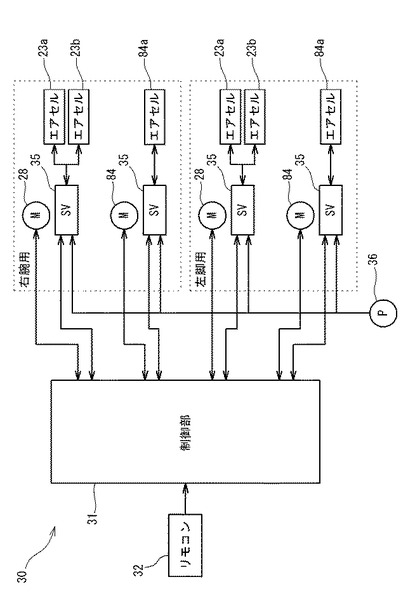
【図25】
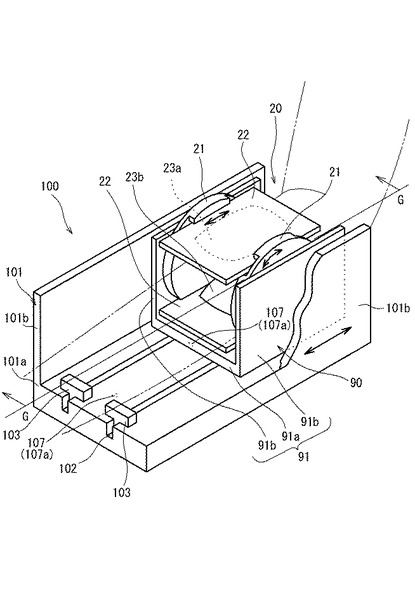
【図26】
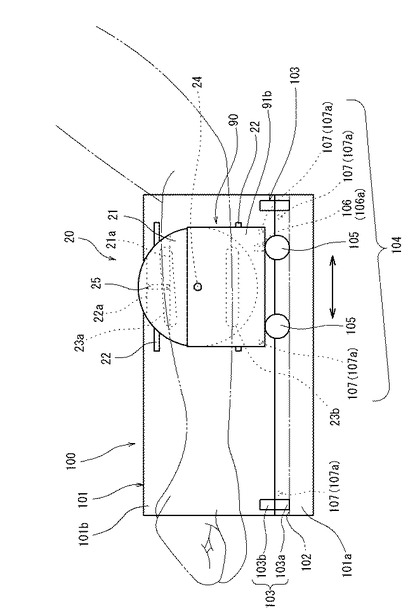
【図27】
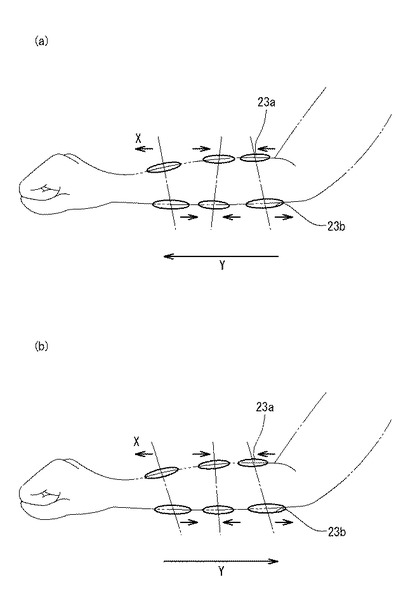
【図28】
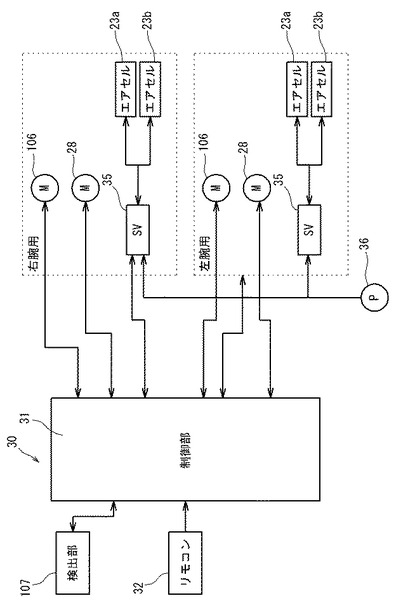
【図29】
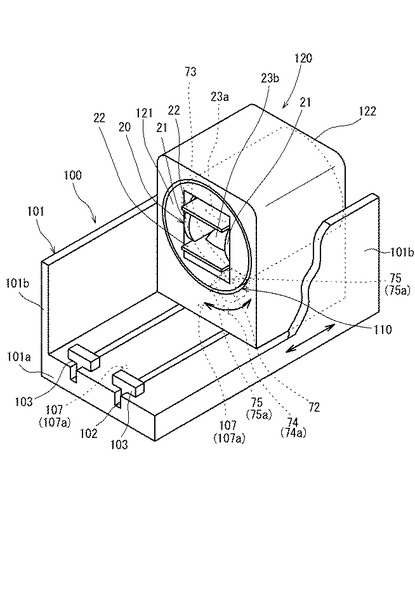
【図30】
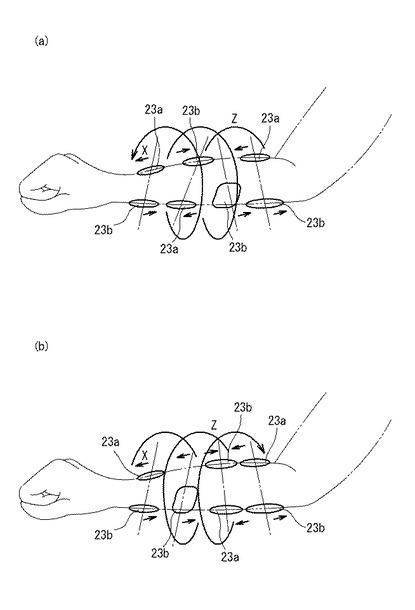
【図31】
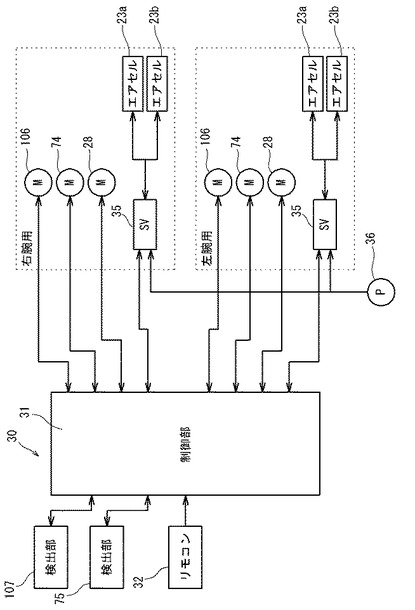
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【公開番号】特開2009−131389(P2009−131389A)
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願番号】特願2007−309126(P2007−309126)
【出願日】平成19年11月29日(2007.11.29)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成21年6月18日(2009.6.18)
【国際特許分類】
【出願日】平成19年11月29日(2007.11.29)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]