
マッサージ機
【課題】マッサージを行う対象とする使用者の身体の脚に対して、脚側部を適切な位置に調整することができるマッサージ機を提供する。
【解決手段】対向して設けられ使用者の脚を間に存在させる一対の脚側部32,35と、これら脚側部32,35の間に設けられたエアセル37,38と、脚側部32,35を移動させて両者の間隔を変化させる駆動手段Bと、脚側部32に設けられ脚との接近を検知するセンサ11bとを備えている。制御手段は、駆動手段Bによって脚側部32,35の間隔を狭めている際に、センサ11bの検知信号を受信すると駆動手段Bを停止させる。
【解決手段】対向して設けられ使用者の脚を間に存在させる一対の脚側部32,35と、これら脚側部32,35の間に設けられたエアセル37,38と、脚側部32,35を移動させて両者の間隔を変化させる駆動手段Bと、脚側部32に設けられ脚との接近を検知するセンサ11bとを備えている。制御手段は、駆動手段Bによって脚側部32,35の間隔を狭めている際に、センサ11bの検知信号を受信すると駆動手段Bを停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、マッサージ機に関する。
【背景技術】
【0002】
従来のマッサージ機において、対向して設けられた左右一対の側部と、これら側部のそれぞれに設けられたエアセルと、側部を接近離反させる駆動手段とを備え、前記側部の間に使用者の身体の一部、例えば脚を存在させ、前記エアセルによりマッサージを行うものがある(例えば、特許文献1)。このマッサージ機は、使用者の脚の太さに応じて前記駆動手段によって左右の側部を接近離反させ、側部の間隔を調整することができる。
【0003】
【特許文献1】特開2002−301125(図14参照)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、前記マッサージ機において、例えば使用者が、脚載せ部(フットレスト)に対して左右どちらかの偏った位置に、脚を載せた状態で、駆動手段によって側部を接近動作させて狭めた場合、左右の側部のうちの一方と脚との位置関係が適切になったとしても、他方の側部と脚との位置関係について隙間が広すぎたり狭すぎたりする場合がある。側部と脚との隙間が広すぎた場合、エアセルと脚とが離れた状態となり、エアセルによる押圧力が弱まるおそれがある。
【0005】
そこで、この発明は、左右の側部の間隔を調整することができるマッサージ機において、マッサージを行う対象とする身体の一部に対して、側部を適切な位置に調整することができるマッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するためのこの発明のマッサージ機は、対向して設けられ使用者の身体の一部を間に存在させるために対をなす側部と、前記側部の少なくとも一方を移動させて前記側部の間隔を変化させる駆動手段と、前記側部の間に設けられ前記側部と一体として移動するマッサージ手段と、前記側部に設けられ前記身体の一部との接近を検知するセンサと、前記駆動手段によって前記側部の間隔を狭めている際に前記センサの検知信号を受信すると前記駆動手段を停止させる制御手段とを備えたものである。
【0007】
このマッサージ機によれば、側部にセンサが設けられており、制御手段がセンサの検知信号を受信すると駆動手段を停止させるので、対をなす側部の間に使用者の身体の一部を存在させた状態で、側部と一体として移動するマッサージ手段によってマッサージを行うために、その身体の一部に対して、側部を接近させた適切な位置に調整することができる。
【0008】
また、前記センサは、前記側部のそれぞれに設けられ、前記制御手段は、前記センサの検知信号を両側とも受信すると前記駆動手段を停止させるのが好ましい。
これによれば、側部のそれぞれにセンサが設けらており、制御手段がセンサの検知信号を両側とも受信すると駆動手段を停止させるので、対をなす側部の間に使用者の身体の一部を存在させた状態で、側部と一体として移動するマッサージ手段によってマッサージを行うために、その身体の一部の両側共において、対の側部を当該身体の一部に接近させた適切な位置に調整することができる。
【0009】
また、前記制御手段は、前記駆動手段によって前記側部の間隔を狭めている際に前記センサの検知信号を受信すると、当該側部と前記身体の一部との間に隙間を形成するために当該側部の間隔を広げてから前記駆動手段を停止させる停止部を有しているのが好ましい。
これによれば、側部と身体の一部との間に隙間を設けることができる。この隙間を、マッサージ手段が動作するための動作代とすることができる。
【0010】
また、前記マッサージ機は、前記制御手段が前記センサの検知信号を受信し前記駆動手段を停止させた後に、前記側部の間隔を微調整する調整手段を更に備えているのが好ましい。
これによれば、側部の間隔を微調整することができ、使用者は好みに合わせた状態が得られる。
【0011】
また、前記マッサージ機は、使用者の身体がマッサージ機本体のマッサージ所定位置に存在しているか否かを検知する存在確認センサを更に備え、前記制御手段は、前記存在確認センサの検知信号を受信すると、前記側部の間隔を広い状態から狭める動作を前記駆動手段に開始させる動作開始部を有しているのが好ましい。
これによれば、使用者の身体がマッサージ機本体のマッサージ所定位置に存在していることを存在確認センサが検知すると、動作開始部は、側部の間隔を広い状態から狭める動作を開始させることができる。
【0012】
また、前記マッサージ機において、前記一対の側部、前記センサ及び前記駆動手段を有する挟み動作部が、使用者の身体の複数の部分にそれぞれ対応して複数設けられており、前記制御手段は、ある挟み動作部の前記センサの検知信号を受信した状態で、別の挟み動作部の前記センサの検知信号を受信しない状態が続くと、前記側部の間隔を狭めるために駆動している前記駆動手段を停止させる挟み防止部を有しているのが好ましい。
これによれば、一つでも挟み動作部において検知信号を受信できない状態が続くと、動作異常と見なして駆動している駆動手段を停止させることができ、マッサージ機の誤った使用を防ぐことができる。
【0013】
また、前記マッサージ機において、前記制御手段は、前記側部の間隔に基づいて前記身体の一部の幅寸法を検出する幅検出部と、この幅検出部の検出結果に基づいて使用者の体型を推定する体型推定部と、この体型推定部による推定結果に応じてマッサージの種類を選択する選択部とを有しているのが好ましい。
これによれば、体型推定部は、使用者の身体の一部の幅寸法に基づいて使用者の体型を推定し、選択部はこの推定結果に応じてマッサージの種類を選択するので、使用者の体型に応じたマッサージが可能となる。
【発明の効果】
【0014】
この発明のマッサージ機によれば、対をなす側部の間に使用者の身体の一部を存在させた状態で、マッサージ手段によってマッサージを行うために、その身体の一部に対して、側部を接近させた適切な位置に調整することができる。
【発明を実施するための最良の形態】
【0015】
以下、この発明の実施の形態を図面に基づいて説明する。
[マッサージ機の全体構成]
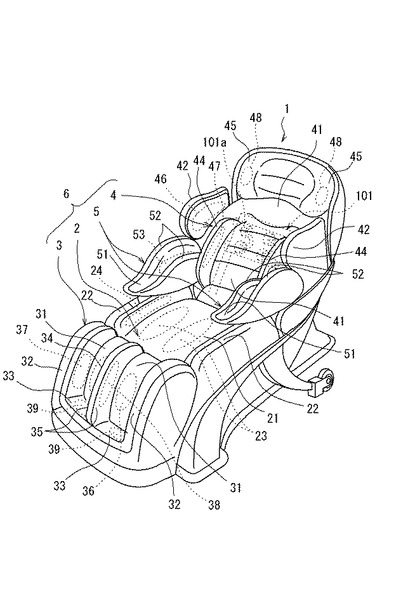
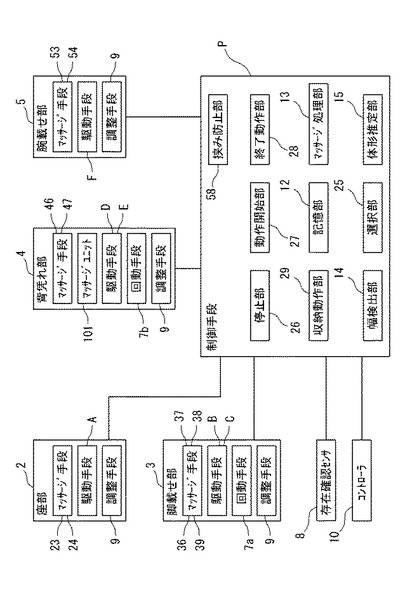
図1はこの発明のマッサージ機の実施の一形態を示す斜視図である。図2はこのマッサージ機が備えているコントローラの説明図である。図3はこのマッサージ機の概略を示すブロック図である。
このマッサージ機1は椅子型であり、座部2と、座部2の前側に設けられた脚載せ部3と、座部2の後側に設けられた背凭れ部4と、左右の腕載せ部(肘掛け部)5とを有した椅子本体部(マッサージ機本体)6を備えている。脚載せ部3は座部2側を回動中心として回動手段(アクチュエータ)7a(図3)により上下回動駆動し、背凭れ部4は座部2側を回動中心として回動手段(アクチュエータ)7b(図3)により前後回動駆動する。また、このマッサージ機は、駆動する各部分の動作を制御する制御手段P(図3)を備えている。
【0016】
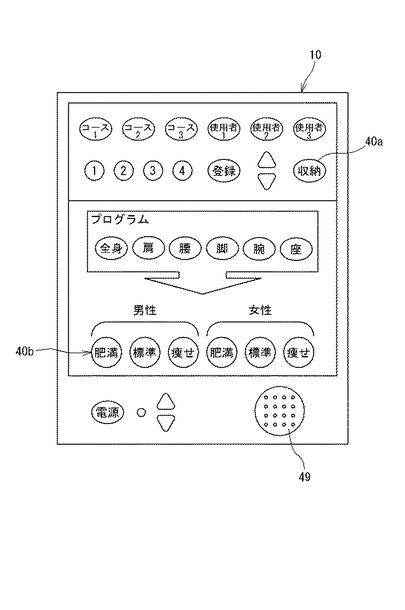
マッサージ機は、使用者が操作するスイッチ(押しボタン)が複数設けられたコントローラ(操作手段)10を備えている。このコントローラ10による操作指令に基づいて、制御手段Pは各種動作を開始させたり停止させたり等の制御を行う。
【0017】
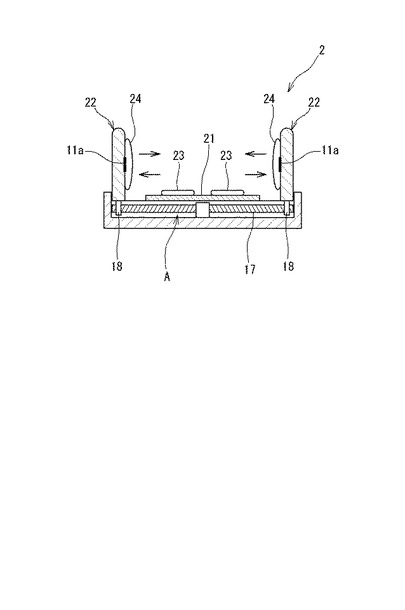
[座部2について]
図4は座部2の概略構成を示す断面図である。座部2は、使用者(被施療者)の臀部及び上腿(脚の膝上)が載せられる座底部21と、この座底部21の左右両側において立設され臀部及び上腿の側方に位置する一対の座側部22,22とを備えている。座側部22,22は対向して設けられており、臀部及び上腿を間に存在させることができるように、両者間に凹部が形成されている。そして、座底部21及び座側部22,22に、使用者に対してマッサージ動作するマッサージ手段が設けられている。マッサージ手段は、座底部21に設けられたエアセル(空気袋)23と、左右の座側部22,22のそれぞれの側面に設けられたエアセル(空気袋)24である。エアセル23及びエアセル24は、空気が給排されることにより膨脹収縮することで使用者の臀部及び上腿に対して、下方から及び側方から押圧するマッサージを行う。
【0018】
また、この座部2において、一対の座側部22,22の少なくとも一方は、相互が接近離反する方向に移動可能となっている。また、一対の座側部22,22の少なくとも一方を移動させて両者の間隔を変化させる駆動手段Aが設けられている。なお、図4では、座側部22,22の両者が共に移動するようになっている。また、駆動手段Aについては後で説明する。これにより、左右の対をなす座側部22,22の間に、マッサージ手段として当該座側部22,22のそれぞれと一体として移動するエアセル24が設けられた構成となる。なお、座側部22と一体として移動するエアセル24は、当該座側部22の側面以外の部分に取り付けられていてもよい。例えば、図示しないが、座側部22を断面L字型とし、座底部21寄りの部分にエアセルを設けてもよく、この場合、エアセルは臀部及び上腿の側面へ向かって膨らむものとするのが好ましい。
【0019】
さらに、座側部22にセンサ11aが設けられており、センサ11aは座側部22と使用者の臀部及び上腿との接近を検知する。センサ11aを対の座側部22,22の一方又は双方に設けることができるが、図示している実施形態では、座側部22,22の双方にそれぞれセンサ11aを設けており、このセンサ11aは、座側部22,22のそれぞれと使用者の臀部及び上腿との接近を検知するものである。
センサ11aは、例えば、駆動手段Aが座側部22,22同士を接近させると、臀部及び上腿からの接触圧を検知する圧力センサとすることができる。なお、このセンサ11aは、座側部22の側面とエアセル24との間に設けられており、センサ11aはエアセル24を介して臀部及び上腿からの接触圧を検知し、これにより座側部22が臀部及び上腿に接近した状態となったことを検知することができる。以上より、一対の座側部22,22、センサ11a及び駆動手段Aを有し、臀部及び上腿を左右両側から挟む、座部2における挟み動作部が構成される。また、前記センサ11aは、座側部22の側面以外に、エアセル24の使用者側の表面に設けられていてもよい(図示せず)。
【0020】
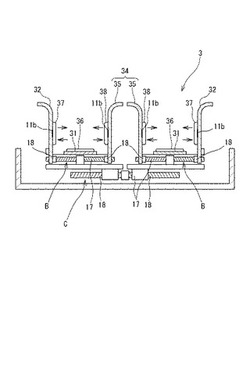
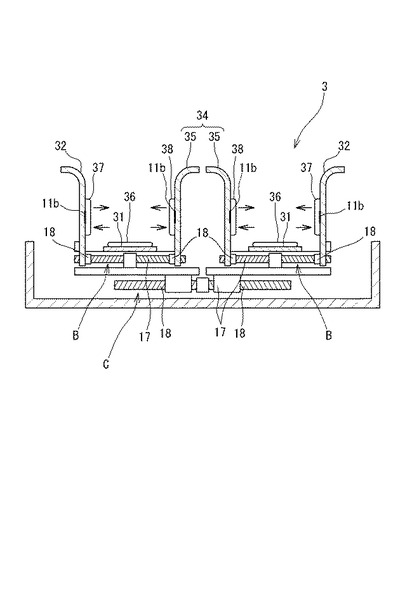
[脚載せ部3について]
図5は脚載せ部3の概略構成を示す断面図である。脚載せ部3は、使用者の左右の下腿(脚の膝下;足も含む)のそれぞれがその背面において載せられる脚底部31,31と、各脚底部31の外側の側方において立設され下腿の外側の側方に位置する外側脚側部32と、左右の外側脚側部32,32の間に立設され左右の下腿の間に位置する一対の内側脚側部35,35と、脚底部31,31の先部から立設されて使用者の左右の足裏側に位置する左右の足裏受部33,33(図1参照)とを備えている。一対の内側脚側部35,35により脚中央部34を構成しており、内側脚側部35は下腿の内側における側方に位置する。
【0021】
図5において、左脚用の外側脚側部32と内側脚側部35とは対向して設けられており、左脚の下腿を間に存在させることができるように、両者5間に凹部が形成されている。右脚用の外側脚側部32と内側脚側部35とは対向して設けられており、右脚の下腿を間に存在させることができるように、両者間に凹部が形成されている。そして、左右の凹部のそれぞれにおいて、脚底部31及び外側脚側部32と内側脚側部35に使用者に対してマッサージ動作するマッサージ手段が設けられている。図1と図5とにおいて、マッサージ手段は、脚底部31に設けられたエアセル36、外側脚側部32の側面に設けられたエアセル37、内側脚側部35の側面に設けられたエアセル38、及び足裏受部33に設けられたエアセル39である。これらのエアセルは、空気が給排されることにより膨脹収縮することで使用者の脚(下腿)に対して押圧するマッサージを行う。
【0022】
また、この脚載せ部3の左右の凹部のそれぞれにおいて、外側脚側部32及び内側脚側部35の少なくとも一方は相互が接近離反する方向に移動可能となっており、外側脚側部32及び内側脚側部35の少なくとも一方を移動させて両者の間隔を変化させる駆動手段Bが設けられている。なお、図5の形態では、外側脚側部32及び内側脚側部35の両者が共に移動するようになっている。また、脚載せ部3は、左右の凹部同士を接近離反させ位置調整する駆動手段Cを備えている。駆動手段B,Cについては後で説明する。
これにより、左右の対をなす外側脚側部32及び内側脚側部35の間に、マッサージ手段として当該外側脚側部32及び内側脚側部35のそれぞれと一体として移動するエアセル37,38が設けられた構成となる。なお、脚側部32(35)と一体として移動するエアセル37(38)は、当該脚側部32(35)の側面以外の部分に取り付けられていてもよい。例えば、図示しないが、脚側部32(35)を断面L字型とし、脚底部31寄りの部分にエアセルを設けてもよく、この場合、エアセルは下腿の側面へ向かって膨らむものとするのが好ましい。
【0023】
さらに、左右の凹部のそれぞれにおいて、外側脚側部32と内側脚側部35との一方又は双方にセンサ11bが設けられており、センサ11bは当該側部と使用者の下腿との接近を検知する。図示している実施形態では、外側脚側部32及び内側脚側部35の双方にそれぞれセンサ11bを設けており、このセンサ11bは、外側脚側部32と使用者の下腿との接近、及び、内側脚側部35と使用者の下腿との接近を検知するものである。
センサ11bは、例えば、駆動手段Bが外側脚側部32及び内側脚側部35同士を接近させ、下腿からの接触圧を検知する圧力センサとすることができる。なお、センサ11bは、外側(内側)脚側部32(35)の側面とエアセル37(38)との間に設けられており、センサ11bはエアセル37(38)を介して下腿からの接触圧を検知する。これにより外側(内側)脚側部32(35)が下腿に接近した状態となったことの検知が可能となる。以上より、一対の外側脚側部32及び内側脚側部35、センサ11b、並びに、駆動手段Bを有し、下腿を左右両側から挟む、脚載せ部3における挟み動作部が構成される。また、前記センサ11bは、側部の側面以外に、エアセル37(38)の使用者側の表面に設けられていてもよい(図示せず)。
【0024】
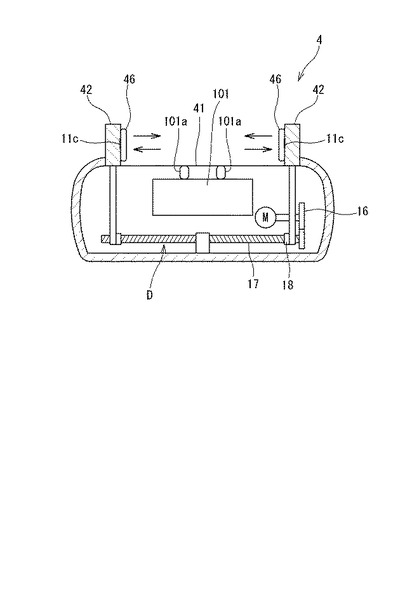
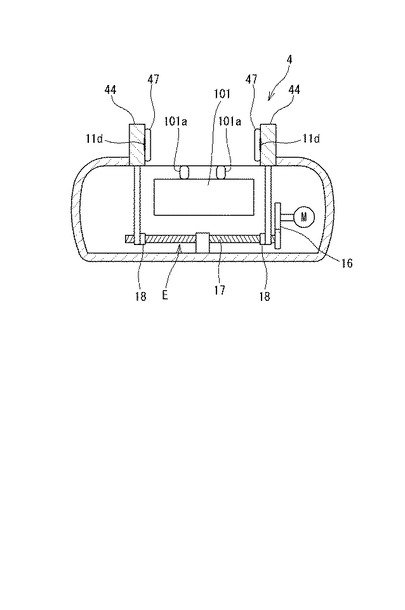
[背凭れ部4について]
図6は背凭れ部4のうちの肩部に対応する部分の概略構成を示す断面図である。図7は背凭れ部4のうちの胴部に対応する部分の概略構成を示す断面図である。背凭れ部4は、使用者の胴部、頭部がその背面側において載せられる背底部41と、背底部41の左右両側において立設され肩の側方に位置する肩側部42,42(図1、図6)と、背底部41の左右両側において立設され胴部の側方に位置する胴側部44,44(図1、図7)と、背底部41の上部において立設され頭部の側方に位置する頭側部45,45(図1)とを備えている。なお、胴側部44,44は、使用者の胴部と腕との間に位置する。
【0025】
一対の肩側部42,42、一対の胴側部44,44、及び、一対の頭側部45,45はそれぞれ対向して設けられており、使用者の上半身の各部を間に存在させることができるように、それぞれの間に凹部が形成されている。そして、一対の肩側部42,42、一対の胴側部44,44、及び、一対の頭側部45,45のそれぞれに、使用者に対してマッサージ動作するマッサージ手段が設けられている。また、背底部41内にはマッサージユニット101が昇降移動可能として設けられている。マッサージユニット101は、モータを利用して施療子(揉み玉)101aを動作させる機械式のものである。
【0026】
前記マッサージ手段は、肩側部42の側面に設けられたエアセル46、胴側部44の側面に設けられたエアセル47、及び、頭側部45の側面に設けられたエアセル48である。これらエアセルは、空気が給排されることにより膨脹収縮することで使用者の上半身の各部に対して、側方から押圧するマッサージを行う。
【0027】
また、この背凭れ部4において、一対の肩側部42,42の少なくとも一方、一対の胴側部44,44の少なくとも一方、及び、一対の頭側部45,45の少なくとも一方は相互が接近離反する方向に移動可能となっている。さらに、一対の肩側部42,42の少なくとも一方を移動させて両者の間隔を変化させる駆動手段D、一対の胴側部44,44の少なくとも一方を移動させて両者の間隔を変化させる駆動手段E、及び、一対の頭側部45,45の少なくとも一方を移動させて両者の間隔を変化させる駆動手段(図示しないが駆動手段Eと同様の構成である)が設けられている。なお、図6と図7との形態では、肩側部42,42の両者、胴側部44,44の両者が移動するようになっている。また、駆動手段D,Eについては後で詳しく説明する。
【0028】
これにより、左右の対をなす肩側部42,42の間に、マッサージ手段として当該肩側部42,42のそれぞれと一体として移動するエアセル46が設けられた構成となる。また、左右の対をなす胴側部44,44の間に、マッサージ手段として当該胴側部44,44のそれぞれと一体として移動するエアセル47が設けられた構成となる。同様に、左右の対をなす頭側部45,45の間に、マッサージ手段として当該頭側部45,45のそれぞれと一体として移動するエアセル48が設けられた構成となる。なお、例えば、肩側部42と一体として移動するエアセル46は、当該肩側部42の側面以外の部分に取り付けられていてもよい。例えば、図示しないが、肩側部42を断面L字型とし、背底部41寄りの部分にエアセルを設けてもよく、この場合、エアセルは肩の側面へ向かって膨らむものとするのが好ましい。
【0029】
さらに、肩側部42にセンサ11cが設けられ、胴側部44にセンサ11dが設けられ、頭側部45にセンサ(センサ11dと同様の構成)が設けられており、これらセンサのそれぞれは、肩側部42、胴側部44、頭側部45と使用者の上半身の各部との接近を検知する。センサ11c,11dのそれぞれを、肩側部42,42の一方又は双方、胴側部44,44の一方又は双方、頭側部45,45の一方又は双方に設けることができるが、図示している実施形態では、肩側部42,42の双方にそれぞれセンサ11cを設け、胴側部44,44の双方のそれぞれにセンサ11dを設け、頭側部45,45の双方のそれぞれにセンサ(センサ11dと同様の構成)を設けており、これらセンサはそれぞれ、肩側部42,42、胴側部44,44、頭側部45,45と使用者の上半身の各部との接近を検知するものである。
前記センサ11c,11dのそれぞれは、例えば、駆動手段Eが胴側部44,44同士を接近させ、胴部からの接触圧を検知する圧力センサとすることができる。なお、これらセンサはそれぞれ、各側部の側面とエアセルとの間に設けられており、当該センサはエアセルを介して上半身の各部からの接触圧を検知し、これにより各側部が上半身の各部に接近した状態となったことの検知が可能となる。また、前記センサ11c,11dのそれぞれは、側部の側面以外に、エアセルの使用者側の表面に設けられていてもよい(図示せず)。
【0030】
以上より、一対の側部42,42、センサ11c及び駆動手段Dを有し、肩部を左右両側から挟む、背凭れ部4における第1の挟み動作部が構成され、一対の側部44,44、センサ11d及び駆動手段Eを有し、胴部を左右両側から挟む、背凭れ部4における第2の挟み動作部が構成される。
【0031】
[腕載せ部5について]
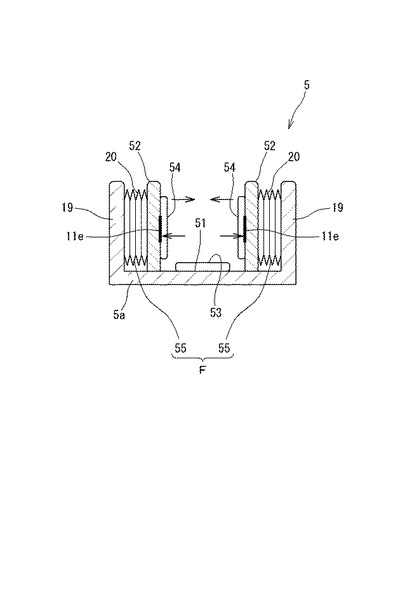
図8は腕載せ部5の概略構成を示す断面図である。腕載せ部5は、左右の腕をそれぞれ載せることができるように、椅子本体部6の左右両側にそれぞれ配置され、座側部22の上方に設けられている。腕載せ部5は、腕を入れることができるように、底側の腕底部51と、この腕底部51の左右両側において立設された腕側部52,52とを備えている。腕側部52は腕の左右両側方に位置する。左右の腕載せ部5のそれぞれにおいて、一対の腕側部52,52は対向して設けられており、腕を間に存在させることができるように、両者間に凹部が形成されている。そして、腕底部51及び腕側部52,52に使用者に対してマッサージ動作するマッサージ手段が設けられている。このマッサージ手段は、腕底部51に設けられたエアセル53と、左右の腕側部52のそれぞれの側面に設けられたエアセル54である。エアセル53及びエアセル54は空気が給排されることにより膨脹収縮することで各腕に対して、下方から及び側方から押圧するマッサージを行う。
【0032】
また、左右の腕載せ部5,5のそれぞれにおいて、一対の腕側部52,52の少なくとも一方は相互が接近離反する方向に移動可能となっており、一対の腕側部52,52の少なくとも一方を移動させて両者の間隔を変化させる駆動手段Fが設けられている。なお、図8の形態では、腕側部52,52の両者が移動するようになっている。また、駆動手段Fについては後で説明する。
これにより、左右の対をなす腕側部52,52の間に、マッサージ手段として当該腕側部52,52のそれぞれと一体として移動するエアセル54が設けられた構成となる。なお、腕側部52,52と一体として移動するエアセル54は、当該腕側部52,52の側面以外の部分に取り付けられていてもよい。例えば、図示しないが、腕側部52,52を断面L字型とし、腕底部51寄りの部分にエアセルを設けてもよく、この場合、エアセルは腕の側面へ向かって膨らむものとするのが好ましい。
【0033】
さらに、腕側部52にセンサ11eが設けられており、腕側部52と使用者の腕との接近を検知する。センサ11eを対の腕側部52,52の一方又は双方に設けることができるが、図示している実施形態では、腕側部52,52の双方にそれぞれセンサ11eを設けており、このセンサ11eは、腕側部52,52のそれぞれと使用者の腕との接近を検知するものである。
センサ11eは、例えば、駆動手段Fが腕側部52,52同士を接近させ、腕からの接触圧を検知する圧力センサとすることができる。なお、センサ11eは、腕側部52とエアセル54との間に設けられており、センサ11eはエアセル54を介して腕からの接触圧を検知し、これにより腕側部52が腕に接近した状態となったことの検知が可能となる。以上より、一対の腕側部52,52、センサ11e及び駆動手段Fを有し、腕を左右両側から挟む、腕載せ部5における挟み動作部が構成される。また、前記センサ11eは、腕側部52の側面以外に、エアセル54の使用者側の表面に設けられていてもよい(図示せず)。
【0034】
[駆動手段について]
一対の側部の間隔を変化させる前記駆動手段について説明する。第1の形態としてはネジ式のものである。これは、代表して図7により説明すると、モータMと、このモータMの回転数を減速するギア部16と、ギア部16からの回転出力によってその軸線回りに回転するネジ棒17と、このネジ棒17に螺合するナット体18とを有している。そして、ナット体18が胴側部44に取り付けられており両者が一体移動可能であり、モータMが正逆回転することで、ナット体18がネジ棒17に沿って左右移動することができる。なお、図7では、一本のネジ棒17に左ネジと右ネジとを形成し、一つのモータMによって一対の胴側部44,44を左右方向に同期的に移動させる構成としているが、図示しないが、左右の胴側部44,44をそれぞれ独立して移動させるために、左用の駆動手段と、右用の駆動手段とを独立させてそれぞれ設けるのが好ましい。なお、この駆動手段の動作(モータMの正逆回転の制御)は、前記制御手段Pが行う。
【0035】
第2の形態としてはエアセル式のものである。この駆動手段は、図8により説明すると、腕側部52と当該腕側部52のさらに外側にある側壁19との間に設けられたエアセル20と、このエアセル20に空気を供給する空気ユニット(図示せず)とを有している。なお、側壁19は腕載せ部5のフレーム5aの一部である。空気ユニットが空気をエアセル20に供給するとエアセル20は膨張し、このエアセル20が腕側部52を押すことで当該腕側部52は左右方向の一方に移動することができる。また、腕側部52と側壁19との間に引っ張りばね(図示せず)を設け、エアセル20を収縮させる方向に付勢し、エアセル20の膨張量に応じて腕側部52を左右方向の他方に移動させることができる。また、空気ユニットは、左右のエアセル20,20のそれぞれに異なる給気量の空気を供給することができるのが好ましい。これにより、左右の腕側部52,52をそれぞれ独立して(移動量を相違させて)移動させることができる。また、左右のエアセル20,20のうちの一方への空気の供給を停止させることもできる。
【0036】
座部2における挟み動作部の駆動手段A、脚載せ部3における挟み動作部の駆動手段B,C、背凭れ部4における挟み動作部の駆動手段D,Eは、前記ネジ式であり、腕載せ部5における挟み動作部の駆動手段Fは、前記エアセル式である。なお、各挟み動作部における駆動手段はこれに限定されず、変更自在である。
【0037】
[各挟み動作部及びその他の構成について]
このマッサージ機1は、使用者の身体の複数の部分にそれぞれ対応させる、座部2における挟み動作部、脚載せ部3における挟み動作部、背凭れ部4における第1と第2の挟み動作部及び腕載せ部5における挟み動作部を備えた構成となる。そして、各挟み動作部は、一対の側部、センサ及び駆動手段を有しており、これらは前記制御手段Pによって制御される。
【0038】
また、このマッサージ機は、各挟み動作部において、側部の間隔を手動によって微調整する調整手段9(図3参照)を更に備えている。調整手段9は、使用者が手動によって操作することで、前記駆動手段のネジ棒17(例えば図5参照)をその軸線回りに回転させることができるようになっている。調整手段9は、図示しないが、例えば、各挟み動作部のフレームに設けられ使用者が操作するハンドル部と、このハンドル部の回転力を前記ネジ棒17にその回転力として伝える動力伝達部(歯車部)とからなる。または、調整手段9は、使用者が操作する前記コントローラ10と前記駆動手段とからなる構成とすることができる。すなわち、使用者がコントローラ10のスイッチを手動で操作することで、その操作に応じて制御手段Pが駆動手段のモータを動作させ、ネジ棒17を回転させてもよい。これにより、調整手段9は側部の間隔を微調整することができる。
【0039】
また、このマッサージ機1は、使用者の身体が椅子本体部(マッサージ機本体)6のマッサージ所定位置に存在しているか否かを検知する存在確認センサ8(図3参照)を更に備えている。なお、マッサージ所定位置とは、この椅子型マッサージ機に使用者が適切な姿勢で着座している状態の身体の位置であり、適切な姿勢とは、椅子本体部6において使用者がマッサージを適切に受けることができる状態である。存在確認センサ8は、例えば、座部2及び脚載せ部3の足裏受け部33の一方又は双方に設けられた荷重センサであり、使用者が座部2に着座し、足裏受け部33に足を載せることにより、その体重に基づいて、使用者が椅子本体部6上に存在していることを検出することができる。この存在確認センサ8の検出信号は前記制御手段Pへ送られる。
【0040】
図2において、コントローラ10には複数のスイッチが設けられているが、そのうちの一つとして、各挟み動作部における側部を相互接近させた収納状態とする動作を行わせるための収納スイッチ40aを有している。使用者がマッサージ機に着座していない状態、つまり、前記存在確認センサ8によって使用者の身体がマッサージ所定位置に存在していないことを検知していることを条件として、収納スイッチ40aが押されると、制御手段Pは、各挟み動作部における側部の間隔を狭める動作を行う。これにより、使用していない時、マッサージ機をコンパクトにすることができる。
【0041】
[制御手段Pの構成について]
制御手段Pは、CPU、メモリ(RAM)及び記憶装置(ROM)を有するプログラマブルなマイコンよりなり、駆動する各部分の動作制御等のための制御処理を行う。そして、この制御手段Pは、所定の各機能を実行するプログラムを記憶装置に格納しており、このプログラムが実行する機能部として、後述する記憶部12、マッサージ処理部13、幅検出部14、体型推定部15、選択部25、停止部26、動作開始部27、終了動作部28及び収納動作部29を備えている(図3参照)。
【0042】
以下、制御手段Pによる各種機能部及び各種動作について説明する。なお、これらについて、脚載せ部3における挟み動作部(図5)での動作を主として説明するが、他の挟み動作部における動作も同じであり、他の挟み動作部でも脚載せ部3における挟み動作部と同時に又は個別に同様の動作を行わせることができる。
【0043】
制御手段Pの記憶部12には、複数の自動マッサージプログラムが記憶されており、これに応じたスイッチがコントローラ10(図2)に設けられている。マッサージプログラムとしては、全身コース、肩コース、腰コース、脚コース、腕コースや、男女別及び体型に応じた肥満コース、標準コース、痩せコース等がある。各マッサージプログラムには、前記マッサー手段(エアセル)及びマッサージユニット101のうちの動作させるもの、及び、そのマッサージ強さ(時間)等の情報が含まれている。
そして、制御手段Pのマッサージ処理部13は、各マッサージプログラムに従って、前記マッサージ手段及びマッサージユニット101を動作させる処理を行う。例えば、使用者がコントローラ10のスイッチを選択して操作すると、この選択されたスイッチに対応したマッサージプログラムを制御手段Pは選択し、これに応じてマッサージ処理部13はマッサージを行わせせる。
【0044】
また、このマッサージ機は、制御手段P及びマッサージユニット101を利用して使用者の肩位置を検出する肩位置検出手段を更に備えている。図1の背凭れ部4において、肩位置検出は、着座した使用者の背中に施療子101aを押し付けた状態で、制御手段Pの指令信号によってマッサージユニット101を下から上へ移動させる。施療子101aが使用者の肩に到達すると、施療子101aを先端に取り付けているアームは揺動自在となっていることから、そのアームの姿勢(角度)が変化する。この変化をマッサージユニット101に設けたセンサ(図示せず)によって検出する。この検出が行われた際の施療子101aの位置から、使用者の肩位置、つまり使用者の座高(この場合、座部2から肩部までの高さ寸法をいう)を検出することができる。そして、この肩位置は制御手段P(記憶部12)に記憶される。前記説明では、肩位置検出のためにアームの角度変化を検出したが、これとは異なり、揉み玉101aを上から下へ移動させ、揉み玉101aが肩に当たった際に当該揉み玉101aに作用する負荷をセンサ(図示せず)が検出し、その負荷が検出された位置を肩位置として検出する構成であってもよい。
【0045】
この制御手段Pの停止部26は、脚載せ部3(図5)の左右の凹部のそれぞれにおいて、駆動手段Bによって対向する脚側部32,35の間隔を狭めている際に、脚側部32,35のそれぞれに設けたセンサ11bの検知信号を両側とも受信すると、前記駆動手段Bを自動的に停止させる。また、外側脚側部32用の外側駆動手段Bと、内側脚側部35用の内側駆動手段Bとを有している場合、停止部26は、外側脚側部32にあるセンサ11bが脚の外側の接近(接触)を検知すると、外側駆動手段Bを停止させ、内側脚側部35にあるセンサ11bが脚の内側の接近(接触)を検知すると、内側駆動手段Bを停止させるのが好ましい。
【0046】
制御手段Pの動作開始部27は、前記存在確認センサ8が使用者の存在を検知し、この検知信号を受信すると、脚側部32,35の間隔を広い状態から狭める動作を駆動手段Bに開始させる。前記のとおり、各挟み動作部では側部同士が接近離反可能であり、これらの間隔が調整可能となっているが、使用者がこのマッサージ機に着座する際、側部の間隔を広い状態として待機させ、着座を容易とさせている。そして、この状態から、使用者の身体が椅子本体部6のマッサージ所定位置に存在していることを前記存在確認センサ8が検知すると、動作開始部27は、側部の間隔を広い状態から狭める動作を自動的に開始させることができ、前記動作開始部27及び前記停止部26によって側部による幅調整を自動的に行うことができる。
【0047】
制御手段Pの終了動作部28は、前記動作開始部27が幅調整を開始させ、前記マッサージ処理部13によってマッサージ(マッサージプログラム)の実行を終えると、脚側部32,35の間隔を広げる動作を自動的に駆動手段Bに行わせる。
また、制御手段Pの収納動作部29は、前記存在確認センサ8が、使用者の身体が前記マッサージ所定位置に存在していないことを検知すると、脚側部32,35の間隔を狭める動作を自動的に行わせる。
【0048】
制御手段Pの幅検出部14は、各挟み動作部において、側部の間隔に基づいて身体の一部の幅寸法を検出する。前記停止部26は、図5において、脚側部32,35のそれぞれに設けたセンサ11bの検知信号を両側とも受信すると、駆動手段Bを自動的に停止させる。そして、幅検出部14はこの際の脚側部32,35の間隔(間隔値)、つまり開き具合を検出する。この検出により幅検出部14は使用者の脚の太さを知ることができる。これと同様に、背凭れ部4(図7)において、停止部26は、胴側部44,44のそれぞれに設けたセンサ11dの検知信号を両側とも受信すると、駆動手段Eを自動的に停止させる。幅検出部14はこの際の胴側部44,44の間隔(間隔値)を検出し、これにより幅検出部14は使用者の胴の太さ(幅)を知ることができる。これにより、幅検出部14は、使用者の体型を検出することができる。
【0049】
具体的に説明すると、制御手段Pの体型推定部15は、幅検出部14が検出した側部間の間隔(間隔値)と、人の体型情報(肥満、標準、痩せ)との相関についての対応データを記憶している。これにより、マッサージ機に着座した使用者に対して、幅検出部14が側部の間隔を検出すると、体型推定部15は前記対応データから、この検出値に基づいて当該使用者の体型が、肥満、標準又は痩せのいずれであるかの判定を行うことができる。
また、体型推定部15は、前記幅検出部14及び前記肩位置検出手段の検出結果に基づいて使用者の体型を推定するのが好ましい。この場合、体型推定部15は、幅検出部14が検出した側部間の間隔(間隔値)及び肩位置検出手段が検出する座高の値と、人の体型情報(肥満、標準、痩せ)との相関についての対応データを記憶している。これにより、マッサージ機に着座した使用者に対して、幅検出部14が側部の間隔を検出し、肩位置検出手段が座高を検出すると、体型推定部15は前記対応データから、これら検出値に基づいて当該使用者の体型が、肥満、標準又は痩せのいずれであるかの判定を行うことができる。
【0050】
また、制御手段Pの選択部25は、前記体型推定部15による推定結果に応じてマッサージの種類を選択する。つまり、選択部25は、体型推定部15による推定結果に応じて、記憶部12に記憶させてあるマッサージプログラムを一つ選択する。例えば、体型推定部15によって使用者が肥満であると推定された場合、選択部25は、肥満である場合に対応させた強いマッサージが行われるマッサージプログラムを選択する。そして、このマッサージプログラムに従って、マッサージ処理部13は前記マッサージ手段及びマッサージユニット101を動作させる処理を行う。
【0051】
[制御手段Pによる具体的な制御について]
以上のようなマッサージ機1によって行われる動作の具体例について説明する。
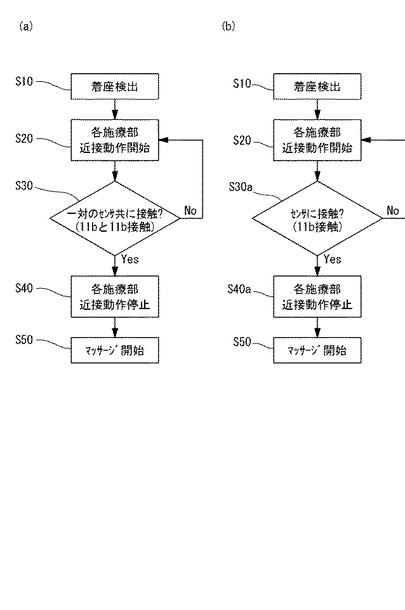
図9(a)は制御手段Pによる制御を説明するフロー図であり、一対の脚側部32,35のそれぞれにセンサ11bが設けられている場合である。
この図において、制御手段Pは、前記存在確認センサ8によって、使用者がこのマッサージ機に着座したことの検出が行われると(ステップS10)、動作開始部27は、駆動手段B(図5)を動作させ、左右の凹部のそれぞれにおいて脚側部32,35を接近させる動作を開始する(ステップS20)。そして、左右の各脚に対する一対のセンサ11b,11bが共に接近(接触)を検知するまで、駆動手段Bによる脚側部32,35の間隔を狭め、両者の間隔を狭める調整を自動で行う(ステップS30)。脚側部32,35が脚の左右にエアセル37,38を介して接触し、脚側部32,35に設けられた両センサ11bが共にその設定値を超えた荷重を検知すると、停止部26は駆動手段Bを停止させ、脚側部32,35の接近動作を停止させる(ステップS40)。そして、マッサージ処理部13がマッサージ動作を開始させる(ステップS50)。
【0052】
この停止部26によれば、左右の各脚に対して、外側のセンサ11bの検知信号を受信すると外側脚側部32の駆動手段Bを停止させ、内側のセンサ11bの検知信号を受信すると内側脚側部35の駆動手段Bを停止させるので、一対の脚側部32,35の間に使用者の左右各脚を存在させた状態で、エアセル37,38によってマッサージを行うために、その各脚の両側共において一対の脚側部32,35を適切な位置に調整することができる。
【0053】
また、図9(b)は制御手段Pによる制御を説明するフロー図であり、一対の脚側部32,35のうちの一方にのみセンサ11bが設けられている場合である。例えば、一対の脚側部32,35のうちの片側である外側脚側部32にのみセンサ11bが設けられた場合である。この場合、図9(a)の前記ステップS30及びステップS40以外は同様の動作が行われる。つまり、センサ11bが脚に対する接近(接触)を検知するまで、駆動手段Bによる脚側部32,35の両者の間隔を狭める調整を自動で行う(ステップS30a)。脚側部32が脚にエアセル37を介して接触し、センサ11bがその設定値を超えた荷重を検知すると、停止部26は駆動手段Bを停止させ、脚側部32,35の接近動作を停止させる(ステップS40a)。
【0054】
また、前記停止部26は、駆動手段Bによって脚側部32,35の間隔を狭めている際に、センサ11bの検知信号を(両側とも)受信すると、当該脚側部32,35と脚(下腿)との間に隙間を形成するために、当該脚側部32,35の間隔を少し広げてから駆動手段Bを停止させるのが好ましい。この場合、停止部26は、タイマー機能部と、反転機能部とを有している。反転機能部は、センサ11bの検知信号を受信すると、駆動手段Bのモータを反転させる機能である。これにより、脚側部32,35の間隔を少し広げる動作が可能となる。タイマー機能部は、駆動手段Bのモータを反転させる時間をカウントし、設定時間経過すると駆動手段Bを停止させる。これにより、脚側部32,35の間隔を少し広げてから駆動手段Bを自動的に停止させることができる。これによれば、左右の各脚と、脚側部32,35のそれぞれとの間に隙間を設けることができる。この隙間を、エアセル37,38が膨張するための動作代として得ることができる。
【0055】
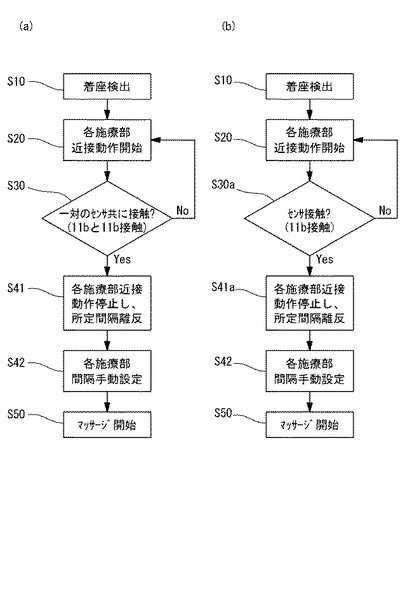
図10(a)は制御手段Pによる他の制御を説明するフロー図であり、一対の脚側部32,35のそれぞれにセンサ11bが設けられている場合である。この動作フローでは、図9(a)の場合とステップS30の後が異なる。つまり、脚側部32,35が脚の左右にエアセル37,38を介して接触し、センサ11bがその設定値を超えた荷重を検知すると、停止部26は、前記のとおり、脚側部32,35の接近動作を停止させた後に、当該駆動手段Bのモータを所定時間だけ反転させ、脚側部32,35の間隔を少し広げてから再び駆動手段Bのモータを停止させる(ステップS41)。さらに、この動作フローでは、使用者は好みに応じて、前記調整手段9によって脚側部32,35の間隔を手動によって微調整する(ステップS42)。その後、マッサージ処理部13がマッサージ動作を開始させる(ステップS50)。
【0056】
また、図10(b)は制御手段Pによる制御を説明するフロー図であり、一対の脚側部32,35のうちの一方にのみセンサ11bが設けられている場合である。この場合、図10(a)の前記ステップS30及びステップS41以外は同様の動作が行われる。つまり、センサ11bが脚に対する接近(接触)を検知するまで、駆動手段Bによる脚側部32,35の両者の間隔を狭める調整を自動で行う(ステップS30a)。脚側部32が脚にエアセル37を介して接触し、センサ11bがその設定値を超えた荷重を検知すると、脚側部32,35の接近動作を停止させた後に、当該駆動手段Bのモータを所定時間だけ反転させ、脚側部32,35の間隔を少し広げてから再び駆動手段Bのモータを停止させる(ステップS41a)。
【0057】
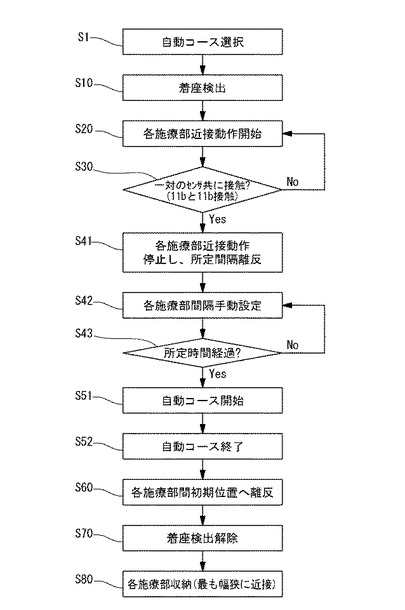
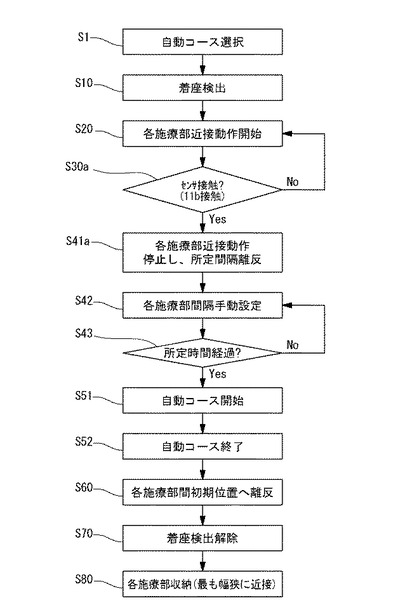
図11は、制御手段Pによる別の制御を説明するフロー図であり、一対の脚側部32,35のそれぞれにセンサ11bが設けられている場合である。使用者が椅子本体部6に着座しコントローラ10(図2)を使用してマッサージコースを選択すると、その指令信号が制御手段Pに送信される(ステップS1)。そして、前記存在確認センサ8によって使用者がこのマッサージ機に着座したことを検出し(ステップS10)、動作開始部27が、存在確認センサ8のこの検知信号を受信すると、脚側部32,35(図5)の間隔を広い状態から狭める動作を駆動手段Bに開始させる(ステップS20)。その次のステップS30は、図9及び図10の動作フローと同じであり、ステップS41及びステップS42は図10の動作フローと同じである。
【0058】
そして、図11の動作フローにおいて、前記マッサージ処理部13は、ステップS42が終了してから所定時間が経過したことを認識すると(ステップS43)、選択されていたマッサージコースのマッサージプログラムに従って、マッサージ手段(エアセル)及びマッサージユニット101を動作させる処理を行う(ステップS51)。
【0059】
そして、マッサージ処理部13によって、所定のマッサージ(マッサージプログラム)の実行を終えると(ステップS52)、前記終了動作部28が、各挟み動作部における側部の間隔を広げる動作を各駆動手段に自動的に行わせ(ステップS60)、側部を初期位置に戻す。なお、初期位置は一対の側部の間隔が最も広い状態にある位置である。これにより、マッサージ後、各挟み動作部における側部の間隔は広くなり、使用者はマッサージ機から離れる動作が容易となる。そして、使用者がマッサージ機から離れると、これを存在確認センサ8が検知し(ステップS70)、前記収納動作部29が各挟み動作部における側部の間隔を狭める動作を各駆動手段に行わせる(ステップS80)。これにより、使用していない状態でマッサージ機を小さくさせることができる。
【0060】
また、図12は制御手段Pによる(図11の場合と同様の)制御を説明するフロー図であるが、一対の脚側部32,35のうちの一方にのみセンサ11bが設けられている場合である。この場合、図11の前記ステップS30及びステップS41以外は同様の動作が行われる。つまり、センサ11bが脚に対する接近(接触)を検知するまで、駆動手段Bによる脚側部32,35の両者の間隔を狭める調整を自動で行う(ステップS30a)。脚側部32が脚にエアセル37を介して接触し、センサ11bがその設定値を超えた荷重を検知すると、脚側部32,35の接近動作を停止させた後に、当該駆動手段Bのモータを所定時間だけ反転させ、脚側部32,35の間隔を少し広げてから再び駆動手段Bのモータを停止させる(ステップS41a)。
【0061】
図11(図12)の動作フローでは、ステップS1において、使用者がコントローラ10を使用してマッサージコースを選択する場合を説明したが、この発明の制御手段Pは、使用者の体型に応じてマッサージコースを自動的に選択することができる。これについて具体的に説明すると、使用者が椅子本体部6に着座すると、図11において、前記ステップS1が行われることなく、ステップS10,S20,S30(S30a),S41(S41a),S42が行われると、前記幅検出部14が、各挟み動作部における側部の間隔に基づいて、使用者の身体の幅寸法を検出する。また、前記ステップの間に、前記肩位置検出手段が、その使用者の座高を検出していてもよい。これにより、前記体型推定部15が、使用者の身体の幅寸法(及び肩位置の情報)に基づいて体型を推定し、前記選択部25が、この推定結果に応じてマッサージの種類(マッサージプログラム)を自動的に選択する。これにより、使用者の体型に応じたマッサージが自動的に選択され、開始される(ステップS51)。
【0062】
なお、体型推定部15が体型推定を行うための情報として、身体の幅寸法及び肩位置の情報以外に、使用者の体重の情報、脚の長さ情報をさらに付加して行っても良い。このために、座部2に体重計(荷重センサ)を設け、これにより(上半身の)体重についての情報を得る。また、脚載せ部3を脚の長さ方向に伸縮可動とした構成とする。脚載せ部3を上方へ回動させ上位置とした状態で、足裏受部33(図1参照)を、最も座部2から離した状態から接近動作させ、使用者の足裏に足裏受部33を当接させる。当接すると前記接近動作を停止させ、その際の足裏受部33の位置に基づいて脚の長さを推定すればよい。
【0063】
また、前記のような体型の推定を自動的に行わずに、使用者がコントローラ10の選択スイッチを選択することで、その使用者の体型に応じたマッサージを開始させてもよい。これを具体的に説明すると、コントローラ10には、複数の体型毎に分けられた選択スイッチ(体型別選択スイッチ)40b(図2参照)が複数設けられている。選択スイッチ40bは、マッサージコースとしての肥満コース、標準コース、痩せコースのいずれかを選択するためのものがあり、図2では男女別としてそれぞれ選択スイッチ40bが設けられている。そして、前記記憶部12には、選択スイッチ40bのそれぞれに対応したマッサージプログラムが記憶されている。
これにより、使用者が自己の体型に基づいて選択スイッチ40bのいずれかを選択すると、制御手段Pは、選択された選択スイッチ40bに対応したマッサージプログラムを選択し、マッサージ処理部13が、このマッサージプログラムに従って、前記マッサージ手段及びマッサージユニット101を動作させる処理を行う。例えば、体型が痩せ型である場合、その使用者は痩せコースのための選択スイッチ40b(痩せ)を操作する。これにより、マッサージコースとして痩せ型の人に適した痩せコースが開始される。
【0064】
[制御手段Pの制御による挟み防止機能について]
制御手段Pは機能部として更に挟み防止部58、前記収納動作部29を備えている。
挟み防止部58は、各挟み動作部におけるセンサの検出信号を受信するようになっており、ある挟み動作部のセンサの検知信号を受信した状態で、別の挟み動作部のセンサの検知信号を受信しない状態が所定時間続くと、各挟み動作部において側部の間隔を狭めるために駆動している駆動手段を停止させる。これによれば、このマッサージ機の誤った使用を防ぐことができ、例えば子供やペットが挟み動作部において誤って挟まれることを防止することができる。なお、停止させる駆動手段は、駆動しているもののうちの一部であってもよいが、全てであるのが好ましい。
【0065】
具体的に説明すると、例えば、挟み防止部58が、腕載せ部5における挟み動作部のセンサ11eからの検知信号を受信しても(この状態で腕載せ部5の腕側部52の接近動作は前記停止部26の機能により停止する)、その他(座部2、脚載せ部3、背凭れ部4)における挟み動作部のセンサからの検知信号を受信しない状態が所定時間続くと、挟み防止部58は、その他の全ての挟み動作部の駆動手段を停止させる。このため、例えばマッサージ機に小さな子供が載った場合、その子供の腕及び身体が、腕載せ部5及び背凭れ部4の挟み動作部に存在しているが、身体が小さいために別の挟み動作部である脚載せ部3に脚が届かず、脚載せ部3における挟み動作部に存在していない状態となることが考えられる。この場合において、各挟み動作部において側部が接近動作し、背凭れ部4における挟み動作部においてその子供が挟まれそうになったとしても、脚載せ部3における挟み動作部においてセンサ11bの検知信号を受信しない状態が続くこととなるため、挟み防止部58は全ての駆動手段を停止させる。このため、背凭れ部3における挟み動作部において子供が挟まれることを防ぐことができる。
【0066】
また、挟み防止機能部としての前記収納動作部29は、コントローラ10(図2)において前記収納スイッチ40aが選択され押されると、コントローラ10が有しているスピーカ49を利用して、各挟み動作部における側部の間隔を狭める動作を行う旨を音声によって報知する。これと共に、注意の旨(例えば「物やペットが挟まっていないか確認してください」という音声)を報知する。さらに、再度収納スイッチ40aを押すことの旨を音声によって報知する。そこで、使用者が再び収納スイッチ40aを操作することによって、収納動作部29は、側部の間隔を実際に狭める動作を実行する。このように収納動作部29は、収納スイッチ40aが操作されると、先ず側部の間隔を狭める動作を行う旨を報知し、再び収納スイッチ40aが操作されて始めて側部の間隔を狭める動作を実行する。これにより、側部の間隔を狭める収納動作を行う場合に、先ず音声によって安全確認が行われてから収納動作を実行させることができるので、側部に誤って挟まれることを防ぐことができる。
【0067】
また、他の挟み防止機能として、腕載せ部5の近傍に、駆動手段の動作を緊急停止させる緊急停止スイッチ(図示)が設けられている。これによれば、使用者が、例えば側部の接近を緊急的に停止したいと感じた際、手乃至腕により緊急停止スイッチを操作すると、前記挟み防止部58は全て又は一部の駆動手段の動作を緊急停止させることができる。
さらに、別の挟み防止機能として、制御手段Pは機能部として緊急停止部を有している。コントローラ10(図2)には、複数のスイッチ(押しボタン)が設けられているが、これらのスイッチの複数が同時に操作されると、緊急停止部は全て又は一部の駆動手段を緊急停止させる。これによれば、使用者が、例えば側部の接近を緊急的に停止したいと感じた際、とにかくコントローラ10の複数のスイッチを同時に押すことによって、駆動手段の動作を緊急停止させることができる。
【0068】
[制御手段Pのその他の機能]
制御手段Pは、前記のとおり、各挟み動作部において、駆動手段によって側部の間隔を狭めている際にセンサの検知信号を両側とも受信すると当該駆動手段を停止させ、側部の間隔の自動調整を行うことができる。そして、制御手段Pの記憶部12は、このように側部の間隔が調整されることで得た調整間隔データを使用者毎に記憶することができる。なお、この調整間隔データとは、間隔が調整された一対の側部の位置についての情報である。そして、前記停止部26は、各挟み動作部において、側部の間隔を広い状態から狭める動作を駆動手段に行わせ、記憶部12に記憶させておいた前記調整間隔データに従って当該駆動手段を停止させることができる。
【0069】
したがって、使用者が、各挟み動作部において一度幅調整を行うと、その使用者の調整間隔データが得られこれを記憶部12に記憶させることができる。このため、その後において、同じ使用者がマッサージ機1を使用する際、コントローラ10において使用者を特定するスイッチを選択することにより、記憶させてあるその使用者のための調整間隔データに従って停止部26は、各挟み動作部における駆動手段を停止させることができる。これにより、マッサージ機1を使用する度毎に側部の間隔を調整する作業を行わなくても、各使用者に応じた側部の間隔を自動的に再現させることができる。
【0070】
また、前記のとおり、このマッサージ機1は各挟み動作部において調整手段9を備えており、この調整手段9は、一対の側部にそれぞれあるセンサの検知信号を両側とも受信し駆動手段を停止させた(以下、この調整を主調整という)後において、当該側部の間隔を微調整することができる。これにより、側部の間隔を微調整することができ、使用者は好みに合わせた状態を得ることができる。そこで、前記調整間隔データを、この調整手段9によって微調整した微調整量に基づくものとすることができる。この場合、マッサージ機を使用する度毎に使用者は、調整手段9を使用して微調整を行わなくても、停止部26は微調整量を自動的に再現させることができる。一対の側部の間隔を広げる微調整であった場合、図10の動作フローのステップS41において、センサによる検知の後に、一対の側部の間隔を少し広げてから駆動手段のモータを停止させているが、この間隔を自動的に少し広げる量を、前記微調整量とすることができる。この場合、マッサージ機1を使用する際の使用者の衣服の厚み、身体のむくみ具合が異なっていても、各側部と身体との間隔を常に一定とすることができる。
【0071】
また、前記調整間隔データを、前記主調整を行いかつ前記微調整を行った後の側部の間隔に基づくものとすることができる。この場合、マッサージ機を使用する度毎に使用者は、前記主調整及び前記微調整を行わなくても、停止部26は自動的に、微調整量を含めて調整幅を行った状態に、一対の側部の間隔を再現させることができる。つまり、図10の動作フローにおいて、ステップS30とステップS41とステップS42とを連続して自動的に行わせることができる。
【0072】
また、この発明のマッサージ機は、図示する形態に限らずこの発明の範囲内において他の形態のものであっても良い。例えば、前記実施形態では、マッサージ機1は、座部2と、背凭れ部4と、脚載せ部3と、腕載せ部5とを備えた椅子型であり、挟み動作部(可動する一対の側部)は、座部2、背凭れ部4、脚載せ部3及び腕載せ部5のそれぞれに設けられている形態を説明したが、挟み動作部は、座部2、背凭れ部4、脚載せ部3及び腕載せ部5の少なくとも一つに設けられていればよい。また、マッサージ機を椅子型として説明したが、脚載せ部3のみからなる脚用のマッサージ機や、マット型のマッサージ機であってもよい。
【図面の簡単な説明】
【0073】
【図1】この発明のマッサージ機の実施の一形態を示す斜視図である。
【図2】コントローラの説明図である。
【図3】このマッサージ機の概略を説明するブロック図である。
【図4】座部の概略構成を示す断面図である。
【図5】脚載せ部の概略構成を示す断面図である。
【図6】背凭れ部のうちの肩部に対応する部分の概略構成を示す断面図である。
【図7】背凭れ部のうちの胴部に対応する部分の概略構成を示す断面図である。
【図8】腕載せ部の概略構成を示す断面図である。
【図9】制御手段による制御を説明するフロー図である。
【図10】制御手段による他の制御を説明するフロー図である。
【図11】制御手段による別の制御を説明するフロー図である。
【図12】制御手段によるさらに別の制御を説明するフロー図である。
【符号の説明】
【0074】
1 マッサージ機
2 座部
3 脚載せ部
4 背凭れ部
5 腕載せ部
6 椅子本体部(マッサージ機本体)
8 存在確認センサ
9 調整手段
11a,11b,11c,11d,11e センサ
14 幅検出部
15 体型推定部
22 座側部(側部)
23,24 エアセル
25 選択部
26 停止部
27 動作開始部
28 終了動作部
29 収納動作部
32 外側脚側部(側部)
35 内側脚側部(側部)
36,37,38,39 エアセル
42 肩側部(側部)
44 胴側部(側部)
46,47 エアセル
52 腕側部(側部)
53,54 エアセル
58 挟み防止部
A,B,C,D,E,F 駆動手段
P 制御手段
【技術分野】
【0001】
この発明は、マッサージ機に関する。
【背景技術】
【0002】
従来のマッサージ機において、対向して設けられた左右一対の側部と、これら側部のそれぞれに設けられたエアセルと、側部を接近離反させる駆動手段とを備え、前記側部の間に使用者の身体の一部、例えば脚を存在させ、前記エアセルによりマッサージを行うものがある(例えば、特許文献1)。このマッサージ機は、使用者の脚の太さに応じて前記駆動手段によって左右の側部を接近離反させ、側部の間隔を調整することができる。
【0003】
【特許文献1】特開2002−301125(図14参照)
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、前記マッサージ機において、例えば使用者が、脚載せ部(フットレスト)に対して左右どちらかの偏った位置に、脚を載せた状態で、駆動手段によって側部を接近動作させて狭めた場合、左右の側部のうちの一方と脚との位置関係が適切になったとしても、他方の側部と脚との位置関係について隙間が広すぎたり狭すぎたりする場合がある。側部と脚との隙間が広すぎた場合、エアセルと脚とが離れた状態となり、エアセルによる押圧力が弱まるおそれがある。
【0005】
そこで、この発明は、左右の側部の間隔を調整することができるマッサージ機において、マッサージを行う対象とする身体の一部に対して、側部を適切な位置に調整することができるマッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するためのこの発明のマッサージ機は、対向して設けられ使用者の身体の一部を間に存在させるために対をなす側部と、前記側部の少なくとも一方を移動させて前記側部の間隔を変化させる駆動手段と、前記側部の間に設けられ前記側部と一体として移動するマッサージ手段と、前記側部に設けられ前記身体の一部との接近を検知するセンサと、前記駆動手段によって前記側部の間隔を狭めている際に前記センサの検知信号を受信すると前記駆動手段を停止させる制御手段とを備えたものである。
【0007】
このマッサージ機によれば、側部にセンサが設けられており、制御手段がセンサの検知信号を受信すると駆動手段を停止させるので、対をなす側部の間に使用者の身体の一部を存在させた状態で、側部と一体として移動するマッサージ手段によってマッサージを行うために、その身体の一部に対して、側部を接近させた適切な位置に調整することができる。
【0008】
また、前記センサは、前記側部のそれぞれに設けられ、前記制御手段は、前記センサの検知信号を両側とも受信すると前記駆動手段を停止させるのが好ましい。
これによれば、側部のそれぞれにセンサが設けらており、制御手段がセンサの検知信号を両側とも受信すると駆動手段を停止させるので、対をなす側部の間に使用者の身体の一部を存在させた状態で、側部と一体として移動するマッサージ手段によってマッサージを行うために、その身体の一部の両側共において、対の側部を当該身体の一部に接近させた適切な位置に調整することができる。
【0009】
また、前記制御手段は、前記駆動手段によって前記側部の間隔を狭めている際に前記センサの検知信号を受信すると、当該側部と前記身体の一部との間に隙間を形成するために当該側部の間隔を広げてから前記駆動手段を停止させる停止部を有しているのが好ましい。
これによれば、側部と身体の一部との間に隙間を設けることができる。この隙間を、マッサージ手段が動作するための動作代とすることができる。
【0010】
また、前記マッサージ機は、前記制御手段が前記センサの検知信号を受信し前記駆動手段を停止させた後に、前記側部の間隔を微調整する調整手段を更に備えているのが好ましい。
これによれば、側部の間隔を微調整することができ、使用者は好みに合わせた状態が得られる。
【0011】
また、前記マッサージ機は、使用者の身体がマッサージ機本体のマッサージ所定位置に存在しているか否かを検知する存在確認センサを更に備え、前記制御手段は、前記存在確認センサの検知信号を受信すると、前記側部の間隔を広い状態から狭める動作を前記駆動手段に開始させる動作開始部を有しているのが好ましい。
これによれば、使用者の身体がマッサージ機本体のマッサージ所定位置に存在していることを存在確認センサが検知すると、動作開始部は、側部の間隔を広い状態から狭める動作を開始させることができる。
【0012】
また、前記マッサージ機において、前記一対の側部、前記センサ及び前記駆動手段を有する挟み動作部が、使用者の身体の複数の部分にそれぞれ対応して複数設けられており、前記制御手段は、ある挟み動作部の前記センサの検知信号を受信した状態で、別の挟み動作部の前記センサの検知信号を受信しない状態が続くと、前記側部の間隔を狭めるために駆動している前記駆動手段を停止させる挟み防止部を有しているのが好ましい。
これによれば、一つでも挟み動作部において検知信号を受信できない状態が続くと、動作異常と見なして駆動している駆動手段を停止させることができ、マッサージ機の誤った使用を防ぐことができる。
【0013】
また、前記マッサージ機において、前記制御手段は、前記側部の間隔に基づいて前記身体の一部の幅寸法を検出する幅検出部と、この幅検出部の検出結果に基づいて使用者の体型を推定する体型推定部と、この体型推定部による推定結果に応じてマッサージの種類を選択する選択部とを有しているのが好ましい。
これによれば、体型推定部は、使用者の身体の一部の幅寸法に基づいて使用者の体型を推定し、選択部はこの推定結果に応じてマッサージの種類を選択するので、使用者の体型に応じたマッサージが可能となる。
【発明の効果】
【0014】
この発明のマッサージ機によれば、対をなす側部の間に使用者の身体の一部を存在させた状態で、マッサージ手段によってマッサージを行うために、その身体の一部に対して、側部を接近させた適切な位置に調整することができる。
【発明を実施するための最良の形態】
【0015】
以下、この発明の実施の形態を図面に基づいて説明する。
[マッサージ機の全体構成]
図1はこの発明のマッサージ機の実施の一形態を示す斜視図である。図2はこのマッサージ機が備えているコントローラの説明図である。図3はこのマッサージ機の概略を示すブロック図である。
このマッサージ機1は椅子型であり、座部2と、座部2の前側に設けられた脚載せ部3と、座部2の後側に設けられた背凭れ部4と、左右の腕載せ部(肘掛け部)5とを有した椅子本体部(マッサージ機本体)6を備えている。脚載せ部3は座部2側を回動中心として回動手段(アクチュエータ)7a(図3)により上下回動駆動し、背凭れ部4は座部2側を回動中心として回動手段(アクチュエータ)7b(図3)により前後回動駆動する。また、このマッサージ機は、駆動する各部分の動作を制御する制御手段P(図3)を備えている。
【0016】
マッサージ機は、使用者が操作するスイッチ(押しボタン)が複数設けられたコントローラ(操作手段)10を備えている。このコントローラ10による操作指令に基づいて、制御手段Pは各種動作を開始させたり停止させたり等の制御を行う。
【0017】
[座部2について]
図4は座部2の概略構成を示す断面図である。座部2は、使用者(被施療者)の臀部及び上腿(脚の膝上)が載せられる座底部21と、この座底部21の左右両側において立設され臀部及び上腿の側方に位置する一対の座側部22,22とを備えている。座側部22,22は対向して設けられており、臀部及び上腿を間に存在させることができるように、両者間に凹部が形成されている。そして、座底部21及び座側部22,22に、使用者に対してマッサージ動作するマッサージ手段が設けられている。マッサージ手段は、座底部21に設けられたエアセル(空気袋)23と、左右の座側部22,22のそれぞれの側面に設けられたエアセル(空気袋)24である。エアセル23及びエアセル24は、空気が給排されることにより膨脹収縮することで使用者の臀部及び上腿に対して、下方から及び側方から押圧するマッサージを行う。
【0018】
また、この座部2において、一対の座側部22,22の少なくとも一方は、相互が接近離反する方向に移動可能となっている。また、一対の座側部22,22の少なくとも一方を移動させて両者の間隔を変化させる駆動手段Aが設けられている。なお、図4では、座側部22,22の両者が共に移動するようになっている。また、駆動手段Aについては後で説明する。これにより、左右の対をなす座側部22,22の間に、マッサージ手段として当該座側部22,22のそれぞれと一体として移動するエアセル24が設けられた構成となる。なお、座側部22と一体として移動するエアセル24は、当該座側部22の側面以外の部分に取り付けられていてもよい。例えば、図示しないが、座側部22を断面L字型とし、座底部21寄りの部分にエアセルを設けてもよく、この場合、エアセルは臀部及び上腿の側面へ向かって膨らむものとするのが好ましい。
【0019】
さらに、座側部22にセンサ11aが設けられており、センサ11aは座側部22と使用者の臀部及び上腿との接近を検知する。センサ11aを対の座側部22,22の一方又は双方に設けることができるが、図示している実施形態では、座側部22,22の双方にそれぞれセンサ11aを設けており、このセンサ11aは、座側部22,22のそれぞれと使用者の臀部及び上腿との接近を検知するものである。
センサ11aは、例えば、駆動手段Aが座側部22,22同士を接近させると、臀部及び上腿からの接触圧を検知する圧力センサとすることができる。なお、このセンサ11aは、座側部22の側面とエアセル24との間に設けられており、センサ11aはエアセル24を介して臀部及び上腿からの接触圧を検知し、これにより座側部22が臀部及び上腿に接近した状態となったことを検知することができる。以上より、一対の座側部22,22、センサ11a及び駆動手段Aを有し、臀部及び上腿を左右両側から挟む、座部2における挟み動作部が構成される。また、前記センサ11aは、座側部22の側面以外に、エアセル24の使用者側の表面に設けられていてもよい(図示せず)。
【0020】
[脚載せ部3について]
図5は脚載せ部3の概略構成を示す断面図である。脚載せ部3は、使用者の左右の下腿(脚の膝下;足も含む)のそれぞれがその背面において載せられる脚底部31,31と、各脚底部31の外側の側方において立設され下腿の外側の側方に位置する外側脚側部32と、左右の外側脚側部32,32の間に立設され左右の下腿の間に位置する一対の内側脚側部35,35と、脚底部31,31の先部から立設されて使用者の左右の足裏側に位置する左右の足裏受部33,33(図1参照)とを備えている。一対の内側脚側部35,35により脚中央部34を構成しており、内側脚側部35は下腿の内側における側方に位置する。
【0021】
図5において、左脚用の外側脚側部32と内側脚側部35とは対向して設けられており、左脚の下腿を間に存在させることができるように、両者5間に凹部が形成されている。右脚用の外側脚側部32と内側脚側部35とは対向して設けられており、右脚の下腿を間に存在させることができるように、両者間に凹部が形成されている。そして、左右の凹部のそれぞれにおいて、脚底部31及び外側脚側部32と内側脚側部35に使用者に対してマッサージ動作するマッサージ手段が設けられている。図1と図5とにおいて、マッサージ手段は、脚底部31に設けられたエアセル36、外側脚側部32の側面に設けられたエアセル37、内側脚側部35の側面に設けられたエアセル38、及び足裏受部33に設けられたエアセル39である。これらのエアセルは、空気が給排されることにより膨脹収縮することで使用者の脚(下腿)に対して押圧するマッサージを行う。
【0022】
また、この脚載せ部3の左右の凹部のそれぞれにおいて、外側脚側部32及び内側脚側部35の少なくとも一方は相互が接近離反する方向に移動可能となっており、外側脚側部32及び内側脚側部35の少なくとも一方を移動させて両者の間隔を変化させる駆動手段Bが設けられている。なお、図5の形態では、外側脚側部32及び内側脚側部35の両者が共に移動するようになっている。また、脚載せ部3は、左右の凹部同士を接近離反させ位置調整する駆動手段Cを備えている。駆動手段B,Cについては後で説明する。
これにより、左右の対をなす外側脚側部32及び内側脚側部35の間に、マッサージ手段として当該外側脚側部32及び内側脚側部35のそれぞれと一体として移動するエアセル37,38が設けられた構成となる。なお、脚側部32(35)と一体として移動するエアセル37(38)は、当該脚側部32(35)の側面以外の部分に取り付けられていてもよい。例えば、図示しないが、脚側部32(35)を断面L字型とし、脚底部31寄りの部分にエアセルを設けてもよく、この場合、エアセルは下腿の側面へ向かって膨らむものとするのが好ましい。
【0023】
さらに、左右の凹部のそれぞれにおいて、外側脚側部32と内側脚側部35との一方又は双方にセンサ11bが設けられており、センサ11bは当該側部と使用者の下腿との接近を検知する。図示している実施形態では、外側脚側部32及び内側脚側部35の双方にそれぞれセンサ11bを設けており、このセンサ11bは、外側脚側部32と使用者の下腿との接近、及び、内側脚側部35と使用者の下腿との接近を検知するものである。
センサ11bは、例えば、駆動手段Bが外側脚側部32及び内側脚側部35同士を接近させ、下腿からの接触圧を検知する圧力センサとすることができる。なお、センサ11bは、外側(内側)脚側部32(35)の側面とエアセル37(38)との間に設けられており、センサ11bはエアセル37(38)を介して下腿からの接触圧を検知する。これにより外側(内側)脚側部32(35)が下腿に接近した状態となったことの検知が可能となる。以上より、一対の外側脚側部32及び内側脚側部35、センサ11b、並びに、駆動手段Bを有し、下腿を左右両側から挟む、脚載せ部3における挟み動作部が構成される。また、前記センサ11bは、側部の側面以外に、エアセル37(38)の使用者側の表面に設けられていてもよい(図示せず)。
【0024】
[背凭れ部4について]
図6は背凭れ部4のうちの肩部に対応する部分の概略構成を示す断面図である。図7は背凭れ部4のうちの胴部に対応する部分の概略構成を示す断面図である。背凭れ部4は、使用者の胴部、頭部がその背面側において載せられる背底部41と、背底部41の左右両側において立設され肩の側方に位置する肩側部42,42(図1、図6)と、背底部41の左右両側において立設され胴部の側方に位置する胴側部44,44(図1、図7)と、背底部41の上部において立設され頭部の側方に位置する頭側部45,45(図1)とを備えている。なお、胴側部44,44は、使用者の胴部と腕との間に位置する。
【0025】
一対の肩側部42,42、一対の胴側部44,44、及び、一対の頭側部45,45はそれぞれ対向して設けられており、使用者の上半身の各部を間に存在させることができるように、それぞれの間に凹部が形成されている。そして、一対の肩側部42,42、一対の胴側部44,44、及び、一対の頭側部45,45のそれぞれに、使用者に対してマッサージ動作するマッサージ手段が設けられている。また、背底部41内にはマッサージユニット101が昇降移動可能として設けられている。マッサージユニット101は、モータを利用して施療子(揉み玉)101aを動作させる機械式のものである。
【0026】
前記マッサージ手段は、肩側部42の側面に設けられたエアセル46、胴側部44の側面に設けられたエアセル47、及び、頭側部45の側面に設けられたエアセル48である。これらエアセルは、空気が給排されることにより膨脹収縮することで使用者の上半身の各部に対して、側方から押圧するマッサージを行う。
【0027】
また、この背凭れ部4において、一対の肩側部42,42の少なくとも一方、一対の胴側部44,44の少なくとも一方、及び、一対の頭側部45,45の少なくとも一方は相互が接近離反する方向に移動可能となっている。さらに、一対の肩側部42,42の少なくとも一方を移動させて両者の間隔を変化させる駆動手段D、一対の胴側部44,44の少なくとも一方を移動させて両者の間隔を変化させる駆動手段E、及び、一対の頭側部45,45の少なくとも一方を移動させて両者の間隔を変化させる駆動手段(図示しないが駆動手段Eと同様の構成である)が設けられている。なお、図6と図7との形態では、肩側部42,42の両者、胴側部44,44の両者が移動するようになっている。また、駆動手段D,Eについては後で詳しく説明する。
【0028】
これにより、左右の対をなす肩側部42,42の間に、マッサージ手段として当該肩側部42,42のそれぞれと一体として移動するエアセル46が設けられた構成となる。また、左右の対をなす胴側部44,44の間に、マッサージ手段として当該胴側部44,44のそれぞれと一体として移動するエアセル47が設けられた構成となる。同様に、左右の対をなす頭側部45,45の間に、マッサージ手段として当該頭側部45,45のそれぞれと一体として移動するエアセル48が設けられた構成となる。なお、例えば、肩側部42と一体として移動するエアセル46は、当該肩側部42の側面以外の部分に取り付けられていてもよい。例えば、図示しないが、肩側部42を断面L字型とし、背底部41寄りの部分にエアセルを設けてもよく、この場合、エアセルは肩の側面へ向かって膨らむものとするのが好ましい。
【0029】
さらに、肩側部42にセンサ11cが設けられ、胴側部44にセンサ11dが設けられ、頭側部45にセンサ(センサ11dと同様の構成)が設けられており、これらセンサのそれぞれは、肩側部42、胴側部44、頭側部45と使用者の上半身の各部との接近を検知する。センサ11c,11dのそれぞれを、肩側部42,42の一方又は双方、胴側部44,44の一方又は双方、頭側部45,45の一方又は双方に設けることができるが、図示している実施形態では、肩側部42,42の双方にそれぞれセンサ11cを設け、胴側部44,44の双方のそれぞれにセンサ11dを設け、頭側部45,45の双方のそれぞれにセンサ(センサ11dと同様の構成)を設けており、これらセンサはそれぞれ、肩側部42,42、胴側部44,44、頭側部45,45と使用者の上半身の各部との接近を検知するものである。
前記センサ11c,11dのそれぞれは、例えば、駆動手段Eが胴側部44,44同士を接近させ、胴部からの接触圧を検知する圧力センサとすることができる。なお、これらセンサはそれぞれ、各側部の側面とエアセルとの間に設けられており、当該センサはエアセルを介して上半身の各部からの接触圧を検知し、これにより各側部が上半身の各部に接近した状態となったことの検知が可能となる。また、前記センサ11c,11dのそれぞれは、側部の側面以外に、エアセルの使用者側の表面に設けられていてもよい(図示せず)。
【0030】
以上より、一対の側部42,42、センサ11c及び駆動手段Dを有し、肩部を左右両側から挟む、背凭れ部4における第1の挟み動作部が構成され、一対の側部44,44、センサ11d及び駆動手段Eを有し、胴部を左右両側から挟む、背凭れ部4における第2の挟み動作部が構成される。
【0031】
[腕載せ部5について]
図8は腕載せ部5の概略構成を示す断面図である。腕載せ部5は、左右の腕をそれぞれ載せることができるように、椅子本体部6の左右両側にそれぞれ配置され、座側部22の上方に設けられている。腕載せ部5は、腕を入れることができるように、底側の腕底部51と、この腕底部51の左右両側において立設された腕側部52,52とを備えている。腕側部52は腕の左右両側方に位置する。左右の腕載せ部5のそれぞれにおいて、一対の腕側部52,52は対向して設けられており、腕を間に存在させることができるように、両者間に凹部が形成されている。そして、腕底部51及び腕側部52,52に使用者に対してマッサージ動作するマッサージ手段が設けられている。このマッサージ手段は、腕底部51に設けられたエアセル53と、左右の腕側部52のそれぞれの側面に設けられたエアセル54である。エアセル53及びエアセル54は空気が給排されることにより膨脹収縮することで各腕に対して、下方から及び側方から押圧するマッサージを行う。
【0032】
また、左右の腕載せ部5,5のそれぞれにおいて、一対の腕側部52,52の少なくとも一方は相互が接近離反する方向に移動可能となっており、一対の腕側部52,52の少なくとも一方を移動させて両者の間隔を変化させる駆動手段Fが設けられている。なお、図8の形態では、腕側部52,52の両者が移動するようになっている。また、駆動手段Fについては後で説明する。
これにより、左右の対をなす腕側部52,52の間に、マッサージ手段として当該腕側部52,52のそれぞれと一体として移動するエアセル54が設けられた構成となる。なお、腕側部52,52と一体として移動するエアセル54は、当該腕側部52,52の側面以外の部分に取り付けられていてもよい。例えば、図示しないが、腕側部52,52を断面L字型とし、腕底部51寄りの部分にエアセルを設けてもよく、この場合、エアセルは腕の側面へ向かって膨らむものとするのが好ましい。
【0033】
さらに、腕側部52にセンサ11eが設けられており、腕側部52と使用者の腕との接近を検知する。センサ11eを対の腕側部52,52の一方又は双方に設けることができるが、図示している実施形態では、腕側部52,52の双方にそれぞれセンサ11eを設けており、このセンサ11eは、腕側部52,52のそれぞれと使用者の腕との接近を検知するものである。
センサ11eは、例えば、駆動手段Fが腕側部52,52同士を接近させ、腕からの接触圧を検知する圧力センサとすることができる。なお、センサ11eは、腕側部52とエアセル54との間に設けられており、センサ11eはエアセル54を介して腕からの接触圧を検知し、これにより腕側部52が腕に接近した状態となったことの検知が可能となる。以上より、一対の腕側部52,52、センサ11e及び駆動手段Fを有し、腕を左右両側から挟む、腕載せ部5における挟み動作部が構成される。また、前記センサ11eは、腕側部52の側面以外に、エアセル54の使用者側の表面に設けられていてもよい(図示せず)。
【0034】
[駆動手段について]
一対の側部の間隔を変化させる前記駆動手段について説明する。第1の形態としてはネジ式のものである。これは、代表して図7により説明すると、モータMと、このモータMの回転数を減速するギア部16と、ギア部16からの回転出力によってその軸線回りに回転するネジ棒17と、このネジ棒17に螺合するナット体18とを有している。そして、ナット体18が胴側部44に取り付けられており両者が一体移動可能であり、モータMが正逆回転することで、ナット体18がネジ棒17に沿って左右移動することができる。なお、図7では、一本のネジ棒17に左ネジと右ネジとを形成し、一つのモータMによって一対の胴側部44,44を左右方向に同期的に移動させる構成としているが、図示しないが、左右の胴側部44,44をそれぞれ独立して移動させるために、左用の駆動手段と、右用の駆動手段とを独立させてそれぞれ設けるのが好ましい。なお、この駆動手段の動作(モータMの正逆回転の制御)は、前記制御手段Pが行う。
【0035】
第2の形態としてはエアセル式のものである。この駆動手段は、図8により説明すると、腕側部52と当該腕側部52のさらに外側にある側壁19との間に設けられたエアセル20と、このエアセル20に空気を供給する空気ユニット(図示せず)とを有している。なお、側壁19は腕載せ部5のフレーム5aの一部である。空気ユニットが空気をエアセル20に供給するとエアセル20は膨張し、このエアセル20が腕側部52を押すことで当該腕側部52は左右方向の一方に移動することができる。また、腕側部52と側壁19との間に引っ張りばね(図示せず)を設け、エアセル20を収縮させる方向に付勢し、エアセル20の膨張量に応じて腕側部52を左右方向の他方に移動させることができる。また、空気ユニットは、左右のエアセル20,20のそれぞれに異なる給気量の空気を供給することができるのが好ましい。これにより、左右の腕側部52,52をそれぞれ独立して(移動量を相違させて)移動させることができる。また、左右のエアセル20,20のうちの一方への空気の供給を停止させることもできる。
【0036】
座部2における挟み動作部の駆動手段A、脚載せ部3における挟み動作部の駆動手段B,C、背凭れ部4における挟み動作部の駆動手段D,Eは、前記ネジ式であり、腕載せ部5における挟み動作部の駆動手段Fは、前記エアセル式である。なお、各挟み動作部における駆動手段はこれに限定されず、変更自在である。
【0037】
[各挟み動作部及びその他の構成について]
このマッサージ機1は、使用者の身体の複数の部分にそれぞれ対応させる、座部2における挟み動作部、脚載せ部3における挟み動作部、背凭れ部4における第1と第2の挟み動作部及び腕載せ部5における挟み動作部を備えた構成となる。そして、各挟み動作部は、一対の側部、センサ及び駆動手段を有しており、これらは前記制御手段Pによって制御される。
【0038】
また、このマッサージ機は、各挟み動作部において、側部の間隔を手動によって微調整する調整手段9(図3参照)を更に備えている。調整手段9は、使用者が手動によって操作することで、前記駆動手段のネジ棒17(例えば図5参照)をその軸線回りに回転させることができるようになっている。調整手段9は、図示しないが、例えば、各挟み動作部のフレームに設けられ使用者が操作するハンドル部と、このハンドル部の回転力を前記ネジ棒17にその回転力として伝える動力伝達部(歯車部)とからなる。または、調整手段9は、使用者が操作する前記コントローラ10と前記駆動手段とからなる構成とすることができる。すなわち、使用者がコントローラ10のスイッチを手動で操作することで、その操作に応じて制御手段Pが駆動手段のモータを動作させ、ネジ棒17を回転させてもよい。これにより、調整手段9は側部の間隔を微調整することができる。
【0039】
また、このマッサージ機1は、使用者の身体が椅子本体部(マッサージ機本体)6のマッサージ所定位置に存在しているか否かを検知する存在確認センサ8(図3参照)を更に備えている。なお、マッサージ所定位置とは、この椅子型マッサージ機に使用者が適切な姿勢で着座している状態の身体の位置であり、適切な姿勢とは、椅子本体部6において使用者がマッサージを適切に受けることができる状態である。存在確認センサ8は、例えば、座部2及び脚載せ部3の足裏受け部33の一方又は双方に設けられた荷重センサであり、使用者が座部2に着座し、足裏受け部33に足を載せることにより、その体重に基づいて、使用者が椅子本体部6上に存在していることを検出することができる。この存在確認センサ8の検出信号は前記制御手段Pへ送られる。
【0040】
図2において、コントローラ10には複数のスイッチが設けられているが、そのうちの一つとして、各挟み動作部における側部を相互接近させた収納状態とする動作を行わせるための収納スイッチ40aを有している。使用者がマッサージ機に着座していない状態、つまり、前記存在確認センサ8によって使用者の身体がマッサージ所定位置に存在していないことを検知していることを条件として、収納スイッチ40aが押されると、制御手段Pは、各挟み動作部における側部の間隔を狭める動作を行う。これにより、使用していない時、マッサージ機をコンパクトにすることができる。
【0041】
[制御手段Pの構成について]
制御手段Pは、CPU、メモリ(RAM)及び記憶装置(ROM)を有するプログラマブルなマイコンよりなり、駆動する各部分の動作制御等のための制御処理を行う。そして、この制御手段Pは、所定の各機能を実行するプログラムを記憶装置に格納しており、このプログラムが実行する機能部として、後述する記憶部12、マッサージ処理部13、幅検出部14、体型推定部15、選択部25、停止部26、動作開始部27、終了動作部28及び収納動作部29を備えている(図3参照)。
【0042】
以下、制御手段Pによる各種機能部及び各種動作について説明する。なお、これらについて、脚載せ部3における挟み動作部(図5)での動作を主として説明するが、他の挟み動作部における動作も同じであり、他の挟み動作部でも脚載せ部3における挟み動作部と同時に又は個別に同様の動作を行わせることができる。
【0043】
制御手段Pの記憶部12には、複数の自動マッサージプログラムが記憶されており、これに応じたスイッチがコントローラ10(図2)に設けられている。マッサージプログラムとしては、全身コース、肩コース、腰コース、脚コース、腕コースや、男女別及び体型に応じた肥満コース、標準コース、痩せコース等がある。各マッサージプログラムには、前記マッサー手段(エアセル)及びマッサージユニット101のうちの動作させるもの、及び、そのマッサージ強さ(時間)等の情報が含まれている。
そして、制御手段Pのマッサージ処理部13は、各マッサージプログラムに従って、前記マッサージ手段及びマッサージユニット101を動作させる処理を行う。例えば、使用者がコントローラ10のスイッチを選択して操作すると、この選択されたスイッチに対応したマッサージプログラムを制御手段Pは選択し、これに応じてマッサージ処理部13はマッサージを行わせせる。
【0044】
また、このマッサージ機は、制御手段P及びマッサージユニット101を利用して使用者の肩位置を検出する肩位置検出手段を更に備えている。図1の背凭れ部4において、肩位置検出は、着座した使用者の背中に施療子101aを押し付けた状態で、制御手段Pの指令信号によってマッサージユニット101を下から上へ移動させる。施療子101aが使用者の肩に到達すると、施療子101aを先端に取り付けているアームは揺動自在となっていることから、そのアームの姿勢(角度)が変化する。この変化をマッサージユニット101に設けたセンサ(図示せず)によって検出する。この検出が行われた際の施療子101aの位置から、使用者の肩位置、つまり使用者の座高(この場合、座部2から肩部までの高さ寸法をいう)を検出することができる。そして、この肩位置は制御手段P(記憶部12)に記憶される。前記説明では、肩位置検出のためにアームの角度変化を検出したが、これとは異なり、揉み玉101aを上から下へ移動させ、揉み玉101aが肩に当たった際に当該揉み玉101aに作用する負荷をセンサ(図示せず)が検出し、その負荷が検出された位置を肩位置として検出する構成であってもよい。
【0045】
この制御手段Pの停止部26は、脚載せ部3(図5)の左右の凹部のそれぞれにおいて、駆動手段Bによって対向する脚側部32,35の間隔を狭めている際に、脚側部32,35のそれぞれに設けたセンサ11bの検知信号を両側とも受信すると、前記駆動手段Bを自動的に停止させる。また、外側脚側部32用の外側駆動手段Bと、内側脚側部35用の内側駆動手段Bとを有している場合、停止部26は、外側脚側部32にあるセンサ11bが脚の外側の接近(接触)を検知すると、外側駆動手段Bを停止させ、内側脚側部35にあるセンサ11bが脚の内側の接近(接触)を検知すると、内側駆動手段Bを停止させるのが好ましい。
【0046】
制御手段Pの動作開始部27は、前記存在確認センサ8が使用者の存在を検知し、この検知信号を受信すると、脚側部32,35の間隔を広い状態から狭める動作を駆動手段Bに開始させる。前記のとおり、各挟み動作部では側部同士が接近離反可能であり、これらの間隔が調整可能となっているが、使用者がこのマッサージ機に着座する際、側部の間隔を広い状態として待機させ、着座を容易とさせている。そして、この状態から、使用者の身体が椅子本体部6のマッサージ所定位置に存在していることを前記存在確認センサ8が検知すると、動作開始部27は、側部の間隔を広い状態から狭める動作を自動的に開始させることができ、前記動作開始部27及び前記停止部26によって側部による幅調整を自動的に行うことができる。
【0047】
制御手段Pの終了動作部28は、前記動作開始部27が幅調整を開始させ、前記マッサージ処理部13によってマッサージ(マッサージプログラム)の実行を終えると、脚側部32,35の間隔を広げる動作を自動的に駆動手段Bに行わせる。
また、制御手段Pの収納動作部29は、前記存在確認センサ8が、使用者の身体が前記マッサージ所定位置に存在していないことを検知すると、脚側部32,35の間隔を狭める動作を自動的に行わせる。
【0048】
制御手段Pの幅検出部14は、各挟み動作部において、側部の間隔に基づいて身体の一部の幅寸法を検出する。前記停止部26は、図5において、脚側部32,35のそれぞれに設けたセンサ11bの検知信号を両側とも受信すると、駆動手段Bを自動的に停止させる。そして、幅検出部14はこの際の脚側部32,35の間隔(間隔値)、つまり開き具合を検出する。この検出により幅検出部14は使用者の脚の太さを知ることができる。これと同様に、背凭れ部4(図7)において、停止部26は、胴側部44,44のそれぞれに設けたセンサ11dの検知信号を両側とも受信すると、駆動手段Eを自動的に停止させる。幅検出部14はこの際の胴側部44,44の間隔(間隔値)を検出し、これにより幅検出部14は使用者の胴の太さ(幅)を知ることができる。これにより、幅検出部14は、使用者の体型を検出することができる。
【0049】
具体的に説明すると、制御手段Pの体型推定部15は、幅検出部14が検出した側部間の間隔(間隔値)と、人の体型情報(肥満、標準、痩せ)との相関についての対応データを記憶している。これにより、マッサージ機に着座した使用者に対して、幅検出部14が側部の間隔を検出すると、体型推定部15は前記対応データから、この検出値に基づいて当該使用者の体型が、肥満、標準又は痩せのいずれであるかの判定を行うことができる。
また、体型推定部15は、前記幅検出部14及び前記肩位置検出手段の検出結果に基づいて使用者の体型を推定するのが好ましい。この場合、体型推定部15は、幅検出部14が検出した側部間の間隔(間隔値)及び肩位置検出手段が検出する座高の値と、人の体型情報(肥満、標準、痩せ)との相関についての対応データを記憶している。これにより、マッサージ機に着座した使用者に対して、幅検出部14が側部の間隔を検出し、肩位置検出手段が座高を検出すると、体型推定部15は前記対応データから、これら検出値に基づいて当該使用者の体型が、肥満、標準又は痩せのいずれであるかの判定を行うことができる。
【0050】
また、制御手段Pの選択部25は、前記体型推定部15による推定結果に応じてマッサージの種類を選択する。つまり、選択部25は、体型推定部15による推定結果に応じて、記憶部12に記憶させてあるマッサージプログラムを一つ選択する。例えば、体型推定部15によって使用者が肥満であると推定された場合、選択部25は、肥満である場合に対応させた強いマッサージが行われるマッサージプログラムを選択する。そして、このマッサージプログラムに従って、マッサージ処理部13は前記マッサージ手段及びマッサージユニット101を動作させる処理を行う。
【0051】
[制御手段Pによる具体的な制御について]
以上のようなマッサージ機1によって行われる動作の具体例について説明する。
図9(a)は制御手段Pによる制御を説明するフロー図であり、一対の脚側部32,35のそれぞれにセンサ11bが設けられている場合である。
この図において、制御手段Pは、前記存在確認センサ8によって、使用者がこのマッサージ機に着座したことの検出が行われると(ステップS10)、動作開始部27は、駆動手段B(図5)を動作させ、左右の凹部のそれぞれにおいて脚側部32,35を接近させる動作を開始する(ステップS20)。そして、左右の各脚に対する一対のセンサ11b,11bが共に接近(接触)を検知するまで、駆動手段Bによる脚側部32,35の間隔を狭め、両者の間隔を狭める調整を自動で行う(ステップS30)。脚側部32,35が脚の左右にエアセル37,38を介して接触し、脚側部32,35に設けられた両センサ11bが共にその設定値を超えた荷重を検知すると、停止部26は駆動手段Bを停止させ、脚側部32,35の接近動作を停止させる(ステップS40)。そして、マッサージ処理部13がマッサージ動作を開始させる(ステップS50)。
【0052】
この停止部26によれば、左右の各脚に対して、外側のセンサ11bの検知信号を受信すると外側脚側部32の駆動手段Bを停止させ、内側のセンサ11bの検知信号を受信すると内側脚側部35の駆動手段Bを停止させるので、一対の脚側部32,35の間に使用者の左右各脚を存在させた状態で、エアセル37,38によってマッサージを行うために、その各脚の両側共において一対の脚側部32,35を適切な位置に調整することができる。
【0053】
また、図9(b)は制御手段Pによる制御を説明するフロー図であり、一対の脚側部32,35のうちの一方にのみセンサ11bが設けられている場合である。例えば、一対の脚側部32,35のうちの片側である外側脚側部32にのみセンサ11bが設けられた場合である。この場合、図9(a)の前記ステップS30及びステップS40以外は同様の動作が行われる。つまり、センサ11bが脚に対する接近(接触)を検知するまで、駆動手段Bによる脚側部32,35の両者の間隔を狭める調整を自動で行う(ステップS30a)。脚側部32が脚にエアセル37を介して接触し、センサ11bがその設定値を超えた荷重を検知すると、停止部26は駆動手段Bを停止させ、脚側部32,35の接近動作を停止させる(ステップS40a)。
【0054】
また、前記停止部26は、駆動手段Bによって脚側部32,35の間隔を狭めている際に、センサ11bの検知信号を(両側とも)受信すると、当該脚側部32,35と脚(下腿)との間に隙間を形成するために、当該脚側部32,35の間隔を少し広げてから駆動手段Bを停止させるのが好ましい。この場合、停止部26は、タイマー機能部と、反転機能部とを有している。反転機能部は、センサ11bの検知信号を受信すると、駆動手段Bのモータを反転させる機能である。これにより、脚側部32,35の間隔を少し広げる動作が可能となる。タイマー機能部は、駆動手段Bのモータを反転させる時間をカウントし、設定時間経過すると駆動手段Bを停止させる。これにより、脚側部32,35の間隔を少し広げてから駆動手段Bを自動的に停止させることができる。これによれば、左右の各脚と、脚側部32,35のそれぞれとの間に隙間を設けることができる。この隙間を、エアセル37,38が膨張するための動作代として得ることができる。
【0055】
図10(a)は制御手段Pによる他の制御を説明するフロー図であり、一対の脚側部32,35のそれぞれにセンサ11bが設けられている場合である。この動作フローでは、図9(a)の場合とステップS30の後が異なる。つまり、脚側部32,35が脚の左右にエアセル37,38を介して接触し、センサ11bがその設定値を超えた荷重を検知すると、停止部26は、前記のとおり、脚側部32,35の接近動作を停止させた後に、当該駆動手段Bのモータを所定時間だけ反転させ、脚側部32,35の間隔を少し広げてから再び駆動手段Bのモータを停止させる(ステップS41)。さらに、この動作フローでは、使用者は好みに応じて、前記調整手段9によって脚側部32,35の間隔を手動によって微調整する(ステップS42)。その後、マッサージ処理部13がマッサージ動作を開始させる(ステップS50)。
【0056】
また、図10(b)は制御手段Pによる制御を説明するフロー図であり、一対の脚側部32,35のうちの一方にのみセンサ11bが設けられている場合である。この場合、図10(a)の前記ステップS30及びステップS41以外は同様の動作が行われる。つまり、センサ11bが脚に対する接近(接触)を検知するまで、駆動手段Bによる脚側部32,35の両者の間隔を狭める調整を自動で行う(ステップS30a)。脚側部32が脚にエアセル37を介して接触し、センサ11bがその設定値を超えた荷重を検知すると、脚側部32,35の接近動作を停止させた後に、当該駆動手段Bのモータを所定時間だけ反転させ、脚側部32,35の間隔を少し広げてから再び駆動手段Bのモータを停止させる(ステップS41a)。
【0057】
図11は、制御手段Pによる別の制御を説明するフロー図であり、一対の脚側部32,35のそれぞれにセンサ11bが設けられている場合である。使用者が椅子本体部6に着座しコントローラ10(図2)を使用してマッサージコースを選択すると、その指令信号が制御手段Pに送信される(ステップS1)。そして、前記存在確認センサ8によって使用者がこのマッサージ機に着座したことを検出し(ステップS10)、動作開始部27が、存在確認センサ8のこの検知信号を受信すると、脚側部32,35(図5)の間隔を広い状態から狭める動作を駆動手段Bに開始させる(ステップS20)。その次のステップS30は、図9及び図10の動作フローと同じであり、ステップS41及びステップS42は図10の動作フローと同じである。
【0058】
そして、図11の動作フローにおいて、前記マッサージ処理部13は、ステップS42が終了してから所定時間が経過したことを認識すると(ステップS43)、選択されていたマッサージコースのマッサージプログラムに従って、マッサージ手段(エアセル)及びマッサージユニット101を動作させる処理を行う(ステップS51)。
【0059】
そして、マッサージ処理部13によって、所定のマッサージ(マッサージプログラム)の実行を終えると(ステップS52)、前記終了動作部28が、各挟み動作部における側部の間隔を広げる動作を各駆動手段に自動的に行わせ(ステップS60)、側部を初期位置に戻す。なお、初期位置は一対の側部の間隔が最も広い状態にある位置である。これにより、マッサージ後、各挟み動作部における側部の間隔は広くなり、使用者はマッサージ機から離れる動作が容易となる。そして、使用者がマッサージ機から離れると、これを存在確認センサ8が検知し(ステップS70)、前記収納動作部29が各挟み動作部における側部の間隔を狭める動作を各駆動手段に行わせる(ステップS80)。これにより、使用していない状態でマッサージ機を小さくさせることができる。
【0060】
また、図12は制御手段Pによる(図11の場合と同様の)制御を説明するフロー図であるが、一対の脚側部32,35のうちの一方にのみセンサ11bが設けられている場合である。この場合、図11の前記ステップS30及びステップS41以外は同様の動作が行われる。つまり、センサ11bが脚に対する接近(接触)を検知するまで、駆動手段Bによる脚側部32,35の両者の間隔を狭める調整を自動で行う(ステップS30a)。脚側部32が脚にエアセル37を介して接触し、センサ11bがその設定値を超えた荷重を検知すると、脚側部32,35の接近動作を停止させた後に、当該駆動手段Bのモータを所定時間だけ反転させ、脚側部32,35の間隔を少し広げてから再び駆動手段Bのモータを停止させる(ステップS41a)。
【0061】
図11(図12)の動作フローでは、ステップS1において、使用者がコントローラ10を使用してマッサージコースを選択する場合を説明したが、この発明の制御手段Pは、使用者の体型に応じてマッサージコースを自動的に選択することができる。これについて具体的に説明すると、使用者が椅子本体部6に着座すると、図11において、前記ステップS1が行われることなく、ステップS10,S20,S30(S30a),S41(S41a),S42が行われると、前記幅検出部14が、各挟み動作部における側部の間隔に基づいて、使用者の身体の幅寸法を検出する。また、前記ステップの間に、前記肩位置検出手段が、その使用者の座高を検出していてもよい。これにより、前記体型推定部15が、使用者の身体の幅寸法(及び肩位置の情報)に基づいて体型を推定し、前記選択部25が、この推定結果に応じてマッサージの種類(マッサージプログラム)を自動的に選択する。これにより、使用者の体型に応じたマッサージが自動的に選択され、開始される(ステップS51)。
【0062】
なお、体型推定部15が体型推定を行うための情報として、身体の幅寸法及び肩位置の情報以外に、使用者の体重の情報、脚の長さ情報をさらに付加して行っても良い。このために、座部2に体重計(荷重センサ)を設け、これにより(上半身の)体重についての情報を得る。また、脚載せ部3を脚の長さ方向に伸縮可動とした構成とする。脚載せ部3を上方へ回動させ上位置とした状態で、足裏受部33(図1参照)を、最も座部2から離した状態から接近動作させ、使用者の足裏に足裏受部33を当接させる。当接すると前記接近動作を停止させ、その際の足裏受部33の位置に基づいて脚の長さを推定すればよい。
【0063】
また、前記のような体型の推定を自動的に行わずに、使用者がコントローラ10の選択スイッチを選択することで、その使用者の体型に応じたマッサージを開始させてもよい。これを具体的に説明すると、コントローラ10には、複数の体型毎に分けられた選択スイッチ(体型別選択スイッチ)40b(図2参照)が複数設けられている。選択スイッチ40bは、マッサージコースとしての肥満コース、標準コース、痩せコースのいずれかを選択するためのものがあり、図2では男女別としてそれぞれ選択スイッチ40bが設けられている。そして、前記記憶部12には、選択スイッチ40bのそれぞれに対応したマッサージプログラムが記憶されている。
これにより、使用者が自己の体型に基づいて選択スイッチ40bのいずれかを選択すると、制御手段Pは、選択された選択スイッチ40bに対応したマッサージプログラムを選択し、マッサージ処理部13が、このマッサージプログラムに従って、前記マッサージ手段及びマッサージユニット101を動作させる処理を行う。例えば、体型が痩せ型である場合、その使用者は痩せコースのための選択スイッチ40b(痩せ)を操作する。これにより、マッサージコースとして痩せ型の人に適した痩せコースが開始される。
【0064】
[制御手段Pの制御による挟み防止機能について]
制御手段Pは機能部として更に挟み防止部58、前記収納動作部29を備えている。
挟み防止部58は、各挟み動作部におけるセンサの検出信号を受信するようになっており、ある挟み動作部のセンサの検知信号を受信した状態で、別の挟み動作部のセンサの検知信号を受信しない状態が所定時間続くと、各挟み動作部において側部の間隔を狭めるために駆動している駆動手段を停止させる。これによれば、このマッサージ機の誤った使用を防ぐことができ、例えば子供やペットが挟み動作部において誤って挟まれることを防止することができる。なお、停止させる駆動手段は、駆動しているもののうちの一部であってもよいが、全てであるのが好ましい。
【0065】
具体的に説明すると、例えば、挟み防止部58が、腕載せ部5における挟み動作部のセンサ11eからの検知信号を受信しても(この状態で腕載せ部5の腕側部52の接近動作は前記停止部26の機能により停止する)、その他(座部2、脚載せ部3、背凭れ部4)における挟み動作部のセンサからの検知信号を受信しない状態が所定時間続くと、挟み防止部58は、その他の全ての挟み動作部の駆動手段を停止させる。このため、例えばマッサージ機に小さな子供が載った場合、その子供の腕及び身体が、腕載せ部5及び背凭れ部4の挟み動作部に存在しているが、身体が小さいために別の挟み動作部である脚載せ部3に脚が届かず、脚載せ部3における挟み動作部に存在していない状態となることが考えられる。この場合において、各挟み動作部において側部が接近動作し、背凭れ部4における挟み動作部においてその子供が挟まれそうになったとしても、脚載せ部3における挟み動作部においてセンサ11bの検知信号を受信しない状態が続くこととなるため、挟み防止部58は全ての駆動手段を停止させる。このため、背凭れ部3における挟み動作部において子供が挟まれることを防ぐことができる。
【0066】
また、挟み防止機能部としての前記収納動作部29は、コントローラ10(図2)において前記収納スイッチ40aが選択され押されると、コントローラ10が有しているスピーカ49を利用して、各挟み動作部における側部の間隔を狭める動作を行う旨を音声によって報知する。これと共に、注意の旨(例えば「物やペットが挟まっていないか確認してください」という音声)を報知する。さらに、再度収納スイッチ40aを押すことの旨を音声によって報知する。そこで、使用者が再び収納スイッチ40aを操作することによって、収納動作部29は、側部の間隔を実際に狭める動作を実行する。このように収納動作部29は、収納スイッチ40aが操作されると、先ず側部の間隔を狭める動作を行う旨を報知し、再び収納スイッチ40aが操作されて始めて側部の間隔を狭める動作を実行する。これにより、側部の間隔を狭める収納動作を行う場合に、先ず音声によって安全確認が行われてから収納動作を実行させることができるので、側部に誤って挟まれることを防ぐことができる。
【0067】
また、他の挟み防止機能として、腕載せ部5の近傍に、駆動手段の動作を緊急停止させる緊急停止スイッチ(図示)が設けられている。これによれば、使用者が、例えば側部の接近を緊急的に停止したいと感じた際、手乃至腕により緊急停止スイッチを操作すると、前記挟み防止部58は全て又は一部の駆動手段の動作を緊急停止させることができる。
さらに、別の挟み防止機能として、制御手段Pは機能部として緊急停止部を有している。コントローラ10(図2)には、複数のスイッチ(押しボタン)が設けられているが、これらのスイッチの複数が同時に操作されると、緊急停止部は全て又は一部の駆動手段を緊急停止させる。これによれば、使用者が、例えば側部の接近を緊急的に停止したいと感じた際、とにかくコントローラ10の複数のスイッチを同時に押すことによって、駆動手段の動作を緊急停止させることができる。
【0068】
[制御手段Pのその他の機能]
制御手段Pは、前記のとおり、各挟み動作部において、駆動手段によって側部の間隔を狭めている際にセンサの検知信号を両側とも受信すると当該駆動手段を停止させ、側部の間隔の自動調整を行うことができる。そして、制御手段Pの記憶部12は、このように側部の間隔が調整されることで得た調整間隔データを使用者毎に記憶することができる。なお、この調整間隔データとは、間隔が調整された一対の側部の位置についての情報である。そして、前記停止部26は、各挟み動作部において、側部の間隔を広い状態から狭める動作を駆動手段に行わせ、記憶部12に記憶させておいた前記調整間隔データに従って当該駆動手段を停止させることができる。
【0069】
したがって、使用者が、各挟み動作部において一度幅調整を行うと、その使用者の調整間隔データが得られこれを記憶部12に記憶させることができる。このため、その後において、同じ使用者がマッサージ機1を使用する際、コントローラ10において使用者を特定するスイッチを選択することにより、記憶させてあるその使用者のための調整間隔データに従って停止部26は、各挟み動作部における駆動手段を停止させることができる。これにより、マッサージ機1を使用する度毎に側部の間隔を調整する作業を行わなくても、各使用者に応じた側部の間隔を自動的に再現させることができる。
【0070】
また、前記のとおり、このマッサージ機1は各挟み動作部において調整手段9を備えており、この調整手段9は、一対の側部にそれぞれあるセンサの検知信号を両側とも受信し駆動手段を停止させた(以下、この調整を主調整という)後において、当該側部の間隔を微調整することができる。これにより、側部の間隔を微調整することができ、使用者は好みに合わせた状態を得ることができる。そこで、前記調整間隔データを、この調整手段9によって微調整した微調整量に基づくものとすることができる。この場合、マッサージ機を使用する度毎に使用者は、調整手段9を使用して微調整を行わなくても、停止部26は微調整量を自動的に再現させることができる。一対の側部の間隔を広げる微調整であった場合、図10の動作フローのステップS41において、センサによる検知の後に、一対の側部の間隔を少し広げてから駆動手段のモータを停止させているが、この間隔を自動的に少し広げる量を、前記微調整量とすることができる。この場合、マッサージ機1を使用する際の使用者の衣服の厚み、身体のむくみ具合が異なっていても、各側部と身体との間隔を常に一定とすることができる。
【0071】
また、前記調整間隔データを、前記主調整を行いかつ前記微調整を行った後の側部の間隔に基づくものとすることができる。この場合、マッサージ機を使用する度毎に使用者は、前記主調整及び前記微調整を行わなくても、停止部26は自動的に、微調整量を含めて調整幅を行った状態に、一対の側部の間隔を再現させることができる。つまり、図10の動作フローにおいて、ステップS30とステップS41とステップS42とを連続して自動的に行わせることができる。
【0072】
また、この発明のマッサージ機は、図示する形態に限らずこの発明の範囲内において他の形態のものであっても良い。例えば、前記実施形態では、マッサージ機1は、座部2と、背凭れ部4と、脚載せ部3と、腕載せ部5とを備えた椅子型であり、挟み動作部(可動する一対の側部)は、座部2、背凭れ部4、脚載せ部3及び腕載せ部5のそれぞれに設けられている形態を説明したが、挟み動作部は、座部2、背凭れ部4、脚載せ部3及び腕載せ部5の少なくとも一つに設けられていればよい。また、マッサージ機を椅子型として説明したが、脚載せ部3のみからなる脚用のマッサージ機や、マット型のマッサージ機であってもよい。
【図面の簡単な説明】
【0073】
【図1】この発明のマッサージ機の実施の一形態を示す斜視図である。
【図2】コントローラの説明図である。
【図3】このマッサージ機の概略を説明するブロック図である。
【図4】座部の概略構成を示す断面図である。
【図5】脚載せ部の概略構成を示す断面図である。
【図6】背凭れ部のうちの肩部に対応する部分の概略構成を示す断面図である。
【図7】背凭れ部のうちの胴部に対応する部分の概略構成を示す断面図である。
【図8】腕載せ部の概略構成を示す断面図である。
【図9】制御手段による制御を説明するフロー図である。
【図10】制御手段による他の制御を説明するフロー図である。
【図11】制御手段による別の制御を説明するフロー図である。
【図12】制御手段によるさらに別の制御を説明するフロー図である。
【符号の説明】
【0074】
1 マッサージ機
2 座部
3 脚載せ部
4 背凭れ部
5 腕載せ部
6 椅子本体部(マッサージ機本体)
8 存在確認センサ
9 調整手段
11a,11b,11c,11d,11e センサ
14 幅検出部
15 体型推定部
22 座側部(側部)
23,24 エアセル
25 選択部
26 停止部
27 動作開始部
28 終了動作部
29 収納動作部
32 外側脚側部(側部)
35 内側脚側部(側部)
36,37,38,39 エアセル
42 肩側部(側部)
44 胴側部(側部)
46,47 エアセル
52 腕側部(側部)
53,54 エアセル
58 挟み防止部
A,B,C,D,E,F 駆動手段
P 制御手段
【特許請求の範囲】
【請求項1】
対向して設けられ使用者の身体の一部を間に存在させるために対をなす側部と、前記側部の少なくとも一方を移動させて前記側部の間隔を変化させる駆動手段と、前記側部の間に設けられ前記側部と一体として移動するマッサージ手段と、前記側部に設けられ前記身体の一部との接近を検知するセンサと、前記駆動手段によって前記側部の間隔を狭めている際に前記センサの検知信号を受信すると前記駆動手段を停止させる制御手段と、を備えたことを特徴とするマッサージ機。
【請求項2】
前記センサは、前記側部のそれぞれに設けられ、前記制御手段は、前記センサの検知信号を両側とも受信すると前記駆動手段を停止させる請求項1に記載のマッサージ機。
【請求項3】
前記制御手段は、前記駆動手段によって前記側部の間隔を狭めている際に前記センサの検知信号を受信すると、当該側部と前記身体の一部との間に隙間を形成するために当該側部の間隔を広げてから前記駆動手段を停止させる停止部を有している請求項1又は2に記載のマッサージ機。
【請求項4】
前記制御手段が前記センサの検知信号を受信し前記駆動手段を停止させた後に、前記側部の間隔を微調整する調整手段を更に備えている請求項1〜3のいずれか一項に記載のマッサージ機。
【請求項5】
使用者の身体がマッサージ機本体のマッサージ所定位置に存在しているか否かを検知する存在確認センサを更に備え、
前記制御手段は、前記存在確認センサの検知信号を受信すると、前記側部の間隔を広い状態から狭める動作を前記駆動手段に開始させる動作開始部を有している請求項1〜4のいずれか一項に記載のマッサージ機。
【請求項6】
前記一対の側部、前記センサ及び前記駆動手段を有する挟み動作部が、使用者の身体の複数の部分にそれぞれ対応して複数設けられており、
前記制御手段は、ある挟み動作部の前記センサの検知信号を受信した状態で、別の挟み動作部の前記センサの検知信号を受信しない状態が続くと、前記側部の間隔を狭めるために駆動している前記駆動手段を停止させる挟み防止部を有している請求項1〜5のいずれか一項に記載のマッサージ機。
【請求項7】
前記制御手段は、前記側部の間隔に基づいて前記身体の一部の幅寸法を検出する幅検出部と、この幅検出部の検出結果に基づいて使用者の体型を推定する体型推定部と、この体型推定部による推定結果に応じてマッサージの種類を選択する選択部とを有している請求項1〜6のいずれか一項に記載のマッサージ機。
【請求項1】
対向して設けられ使用者の身体の一部を間に存在させるために対をなす側部と、前記側部の少なくとも一方を移動させて前記側部の間隔を変化させる駆動手段と、前記側部の間に設けられ前記側部と一体として移動するマッサージ手段と、前記側部に設けられ前記身体の一部との接近を検知するセンサと、前記駆動手段によって前記側部の間隔を狭めている際に前記センサの検知信号を受信すると前記駆動手段を停止させる制御手段と、を備えたことを特徴とするマッサージ機。
【請求項2】
前記センサは、前記側部のそれぞれに設けられ、前記制御手段は、前記センサの検知信号を両側とも受信すると前記駆動手段を停止させる請求項1に記載のマッサージ機。
【請求項3】
前記制御手段は、前記駆動手段によって前記側部の間隔を狭めている際に前記センサの検知信号を受信すると、当該側部と前記身体の一部との間に隙間を形成するために当該側部の間隔を広げてから前記駆動手段を停止させる停止部を有している請求項1又は2に記載のマッサージ機。
【請求項4】
前記制御手段が前記センサの検知信号を受信し前記駆動手段を停止させた後に、前記側部の間隔を微調整する調整手段を更に備えている請求項1〜3のいずれか一項に記載のマッサージ機。
【請求項5】
使用者の身体がマッサージ機本体のマッサージ所定位置に存在しているか否かを検知する存在確認センサを更に備え、
前記制御手段は、前記存在確認センサの検知信号を受信すると、前記側部の間隔を広い状態から狭める動作を前記駆動手段に開始させる動作開始部を有している請求項1〜4のいずれか一項に記載のマッサージ機。
【請求項6】
前記一対の側部、前記センサ及び前記駆動手段を有する挟み動作部が、使用者の身体の複数の部分にそれぞれ対応して複数設けられており、
前記制御手段は、ある挟み動作部の前記センサの検知信号を受信した状態で、別の挟み動作部の前記センサの検知信号を受信しない状態が続くと、前記側部の間隔を狭めるために駆動している前記駆動手段を停止させる挟み防止部を有している請求項1〜5のいずれか一項に記載のマッサージ機。
【請求項7】
前記制御手段は、前記側部の間隔に基づいて前記身体の一部の幅寸法を検出する幅検出部と、この幅検出部の検出結果に基づいて使用者の体型を推定する体型推定部と、この体型推定部による推定結果に応じてマッサージの種類を選択する選択部とを有している請求項1〜6のいずれか一項に記載のマッサージ機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2008−220725(P2008−220725A)
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願番号】特願2007−64719(P2007−64719)
【出願日】平成19年3月14日(2007.3.14)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願日】平成19年3月14日(2007.3.14)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]