
マッサージ機
【課題】モータを動力として動作する施療子と、エアの給排により膨縮動作するエアセルとを備えており、エアセルによる動作に対して施療子による動作が大きく遅れることを防止することのできるマッサージ機を提供する。
【解決手段】施療子15を動作させ複数のメカ動作ステップを実行する第1制御部と、エアセル22bを動作させ前記メカ動作ステップと並行するエア動作ステップを実行する第2制御部とを備えている。第2制御部は、前記エア動作ステップを、これと並行する前記メカ動作ステップの終了に基づいて終了させる。
【解決手段】施療子15を動作させ複数のメカ動作ステップを実行する第1制御部と、エアセル22bを動作させ前記メカ動作ステップと並行するエア動作ステップを実行する第2制御部とを備えている。第2制御部は、前記エア動作ステップを、これと並行する前記メカ動作ステップの終了に基づいて終了させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、施療子とエアセルとを有しているマッサージ機に関する。
【背景技術】
【0002】
マッサージ機において、マッサージ具として施療子(モミ玉)とエアセルとの双方を備えたものが知られている(例えば、特許文献1参照)。施療子によるマッサージは、モータのトルクが減速器部(ギア部)及び駆動軸を介してアームに伝わり、このアームに取り付けられた前記施療子が揉みや叩き等の動作を行うことにより得られる。一方、エアセルによるマッサージは、マッサージ機が有しているエアユニットから空気が供給されると、エアセルは膨張し、被施療部(使用者の身体の各部)を押圧することにより得られる。
そして、このようなマッサージ機が備えている制御部は、マッサージプログラム(マッサージコース)を記憶してあり、このマッサージプログラムに従って施療子とエアセルとを動作させている。このマッサージプログラムでは、施療子とエアセルとがそれぞれ所定の動作を行うように設定されている。
【0003】
【特許文献1】特開2004−358277号公報(図1参照)
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記マッサージ機において、エアセルは使用者の体型に関係なくマッサージプログラムを予定時間とおりで終了することができるが、施療子によるマッサージ動作は、使用者の体型によって予定時間に対して遅延することがある。これは、エアセルは設定された周期で膨縮を繰り返すように構成されていることから、使用者の体重が大きくなってエアセルに作用する負荷が増大しても、予定時間に対して遅れが生じない。一方、施療子によるマッサージでは、この施療子に使用者の体重が作用し、当該施療子を動作させるためのモータに大きな負荷が作用すると、モータによる施療子の動作スピードが遅くなる。このため、施療子による動作に時間遅延が生じる。
【0005】
このように従来のマッサージ機では、施療子の動作に前記のような時間遅延が生じた場合に、マッサージプログラムにおいて、施療子による動作の終了時間がエアセルによる動作の終了時間よりも大きく遅れることがある。
そこで、この発明は、エアセルによる動作に対して施療子による動作が大きく遅れることを防止することのできるマッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するためのこの発明のマッサージ機は、モータを動力として動作する施療子を有する機械式マッサージ部と、エアの給排により膨縮動作するエアセルを有するエア式マッサージ部と、前記機械式マッサージ部を動作させ複数のメカ動作ステップを逐次実行する第1制御部と、前記エア式マッサージ部を動作させ前記メカ動作ステップと並行するエア動作ステップを逐次実行する第2制御部とを備え、前記第2制御部は、前記エア動作ステップを、これと並行する前記メカ動作ステップの終了に基づいて終了させるものである。
【0007】
このマッサージ機によれば、エア動作ステップと、これと並行するメカ動作ステップとのうち、メカ動作ステップに時間遅延が発生しても、第2制御部は、このメカ動作ステップの終了に基づいて、エア動作ステップを終了させる。このため、エアセルによる動作に対して施療子による動作が大きく遅れることを防止することができる。
【0008】
また、前記エア動作ステップは、前記エア式マッサージ部に第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エア式マッサージ部に第2の動作を行わせる第2時間領域とからなり、前記第2制御部は、前記第2時間領域の長さを変更することにより、前記メカ動作ステップの終了に合わせて前記エア動作ステップを終了させるのが好ましい。
これによれば、メカ動作ステップの終了に合わせてエア動作ステップを終了させるために、第2制御部は、エア動作ステップにおける第2時間領域の長さを変更する構成であるため、このエア動作ステップでは、第1時間領域において第1の動作を必ず実行させ完了することができる。このため、例えば、第1の動作を、そのエア動作ステップにおいて施療に必要な動作として設定しておけば、当該エア動作ステップにおいて、使用者に対して目的とする施療の効果を与えることができる。
【0009】
また、前記マッサージ機において、前記第2の動作を、前記エアセルを収縮状態としている動作とすることができる。この場合、メカ動作ステップが終了すると、エアセルが収縮状態でエア動作ステップは終了する。このため、例えば、次のエア動作ステップでエアセルは直ぐに膨張動作が可能となる。したがって、次のエア動作ステップが、開始と同時にエアセルを膨張動作させる場合に好ましい。
また、前記マッサージ機において、前記第2の動作を、前記エアセルを膨張状態としている動作とすることができる。この場合、メカ動作ステップが終了するまで、エアセルを膨張状態として被施療部に対して作用を与えた状態とすることができる。
【0010】
また、前記マッサージ機において、前記第1の動作は、エアセルが膨縮を繰り返す動作であり、前記第2の動作を、前記第1の動作と同じ動作とすることができる。この場合、メカ動作ステップが終了するまで、エアセルが膨縮を繰り返す動作を継続することができる。
また、前記マッサージ機において、前記第1の動作は、エアセルが膨縮を繰り返す動作であり、前記第2の動作を、前記第1の動作と異なる膨縮動作とすることができる。この場合、メカ動作ステップが終了するまで、エアセルに第1の動作と異なる第2動作を行わせ被施療部に対して作用を与えた状態とすることができる。例えば、第1動作をそのエア動作ステップにおいて施療に必要な動作とし、第2動作をエアセルが動作していることを使用者に対して表現している演出的な動作とすることができ、この演出的な動作は、次のステップでの動作のための「つなぎ」としての機能を有するものとすることができる。
【0011】
また、前記マッサージ機において、前記第2制御部は、前記メカ動作ステップと並行する前記エア動作ステップにおいて、当該メカ動作ステップでの前記機械式マッサージ部の動作と関連付けられた動作を前記エア式マッサージ部に行わせ、前記第2制御部は、前記メカ動作ステップから次のメカ動作ステップで行われる前記機械式マッサージ部の動作の変化に合わせて、次のエア動作ステップにおいて前記エア式マッサージ部の動作を変化させるのが好ましい。
これによれば、メカ動作ステップにおける機械式マッサージ部の動作と、これに並行するエア動作ステップにおけるエア式マッサージ部の動作とを関連付けたものとすることができ、そして、機械式マッサージ部の動作の変化に合わせて、エア式マッサージ部の動作を変化させるので、次のステップにおいても、両者の動作を関連付けたものとすることができる。
【発明の効果】
【0012】
この発明によれば、メカ動作ステップに時間遅延が発生しても、このメカ動作ステップの終了に基づいて、エア動作ステップを終了させることができるため、エアセルによる動作に対して施療子による動作が大きく遅れることを防止することができる。
【発明を実施するための最良の形態】
【0013】
以下、この発明の実施の形態を図面に基づいて説明する。
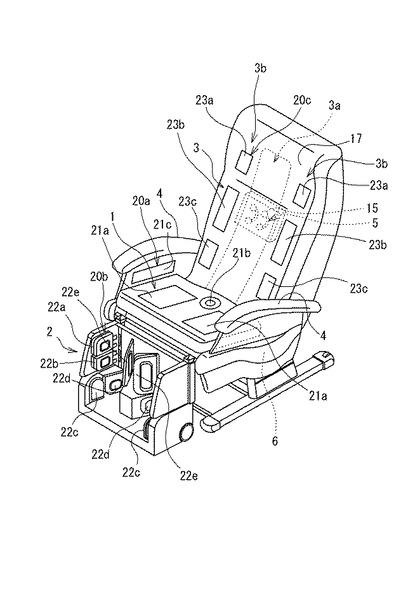
図1はこの発明のマッサージ機の実施の一形態を示す斜視図である。このマッサージ機は、使用者(被施療者)の臀部及び大腿部を支持する座部1と、使用者の脚を支持するフットレスト(脚載せ部)2と、使用者の背中を支持可能にする背凭れ部3と、左右両側に設けられ使用者の腕を支持する肘掛け部4とを備えた椅子型のものである。フットレスト2と背凭れ部3とは、電動駆動機構、流体圧駆動機構又は手動構造等により、座部4に対する角度変更が可能となっている。
【0014】
座部1には、使用者の臀部、大腿部を、下部及び側部からマッサージ(押圧)する座部用エア式マッサージ部20aが設けられており、このエア式マッサージ部20aは、複数のエアセル21a,21b,21cを有している。
フットレスト2には、使用者のふくらはぎ、足首、足の甲等の部分をマッサージ(押圧)する脚用エア式マッサージ部20bが設けられており、このエア式マッサージ部20bは、複数のエアセル22a,22b,22c,22d,22eを有している。
背凭れ部3には、使用者の左右の肩部、背中の左右両側部、腰の左右両側部をマッサージ(押圧)する背凭れ部用エア式マッサージ部20cが設けられており、このエア式マッサージ部20cは、複数のエアセル23a,23b,23cを有している。
【0015】
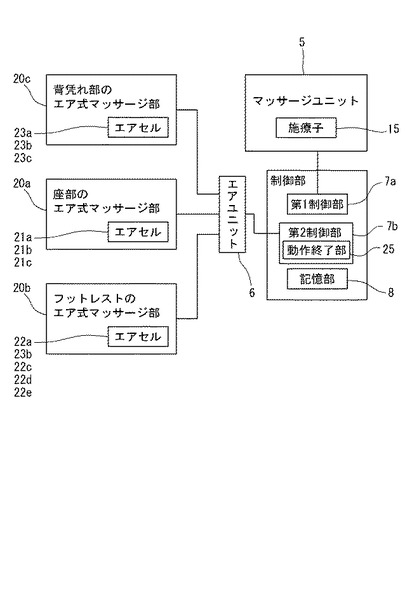
これらエアセルのそれぞれは設置場所に応じた形状となっており、各エアセルは例えば蛇腹形状であり膨張することができる。そして、座部1内に設けたエアユニット6によって、エアセルに対してエアの給排が行われることで、各エアセルは膨縮動作することができる。エアユニット6は切り替え制御弁(図示せず)等を有しており、マッサージ機が備えている第2制御部7b(図4参照)が、この切り替え制御弁を制御することにより、エアセルのそれぞれは独立して動作することができる。
【0016】
図1において、背凭れ部3には、使用者の肩部、背中及び腰部をマッサージするための施療子(モミ玉)15を備えているマッサージユニット(機械式マッサージ部)5が、上下方向に昇降自在に設けられている。このマッサージユニット5は、マッサージ機が備えている第1制御部7a(図4参照)によってその動作が制御される。背凭れ部3の内部には、上下方向に延びる左右一対のガイドレール(図示せず)が延設されており、この両ガイドレール間にマッサージユニット5が走行自在に設けられている。背凭れ部3は、中央部に開口部3aと、その両側に使用者の身体を支持する支持部3bとを有しており、施療子15は開口部3a内において昇降したり、揉みや叩き等の動作をしたりできる。なお、前記エアセル23a,23b,23cは、支持部3bに設けられている。また、背凭れ部3の前面部分は、布製又は革製の可撓性を有するカバー部材17によって覆われている。
【0017】
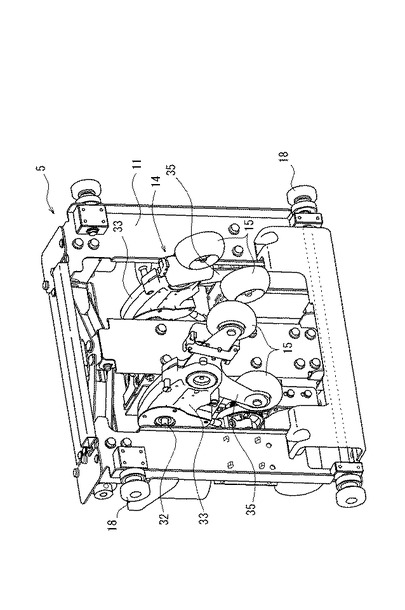
図2はマッサージユニット5の前方からの斜視図であり、図3は後方からの斜視図である。このマッサージユニット5は、背凭れ部3内において昇降自在である昇降フレーム11と、この昇降フレーム11に取り付けられ、使用者の身体(被施療部)をマッサージする施療子15を有する施療機構14を備えている。昇降フレーム11に昇降用モータ、減速器部(図示せず)及びローラ18が設けられており、前記第1制御部7aの制御信号に基づいてこのモータが回転することによりローラ18が転動し、マッサージユニット5はガイドレール(図示せず)に沿って自走することができる。
【0018】
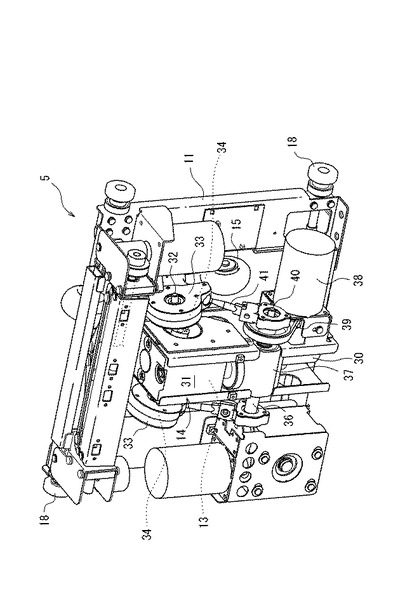
図3において、施療機構14は、揉み用モータ30と、この揉み用モータ30と連結されモータ30の回転数を減速する減速ギア(ギア部)13と、左右両側へ延び減速ギア13の出力軸となっている揉み用駆動軸34と、駆動アーム33とを備えている。揉み用モータ30が回転駆動すると、減速ギア13を介して揉み用駆動軸34が回転する。揉み用駆動軸34の左右両側には、駆動軸34の軸心に対して偏角した(傾斜した)揉み用クランク軸32が固定されており、この左右の各クランク軸32に前記駆動アーム33の第1基端部が回動自在に取り付けられている。そして、図2において、この駆動アーム33の先端部に、ブーメラン状に湾曲した支持アーム35が、その中央屈曲部を中心として、回動自在に連結されている。この支持アーム35の上下各端部に、ローラよりなる前記施療子15が回転自在に取り付けられている。
【0019】
また、施療機構14は、叩き用駆動軸36と、この叩き用駆動軸36を回転可能に支持している軸受け部37と、叩き用駆動軸36を回転駆動する叩き用モータ38とを備えている。叩き用駆動軸36と叩き用モータ38の出力軸(図示せず)は伝動ベルト39によって連動連結されている。また、叩き用駆動軸36の左右両端部には、当該駆動軸36の軸心に対して偏心している偏心ピン40が固定されており、この偏心ピン40はユニバーサルジョイントよりなる伝動バー41を介して前記駆動アーム33の第2基端部に連動連結されている。
【0020】
この施療機構14によれば、第1制御部7a(図4参照)の動作指令信号によって、揉み用モータ30を作動させると、揉み用駆動軸34及び揉み用クランク軸32が回転駆動し、この回転によって駆動アーム33を介して両支持アーム35が左右に接近又は離反しつつ前後移動し、これによって四つの施療子15が人体に対して揉みマッサージ動作を行うようになっている。他方、第1制御部7aの動作指令信号によって、叩き用モータ38を作動させると、叩き用駆動軸36及び偏心ピン40が回転駆動し、この回転によって伝動バー41が駆動アーム33の第2基端部を高速で押し引きし、これによって四つの施療子15が細かく前後移動を繰り返す叩きマッサージ動作を行うようになっている。
【0021】
このように、マッサージユニット5は、モータ30(38)と施療子15との間において、複数の機械要素が連動連結された構成であり、施療子15はモータ30(38)を動力として動作し使用者に対してマッサージ動作を行うことができるが、この使用者から施療子15に作用する反力(負荷)に応じて当該モータ30(38)に作用する負荷が変化する構成である。したがって、使用者から施療子15に大きな反力が作用することにより、モータ30(38)に大きな負荷が作用すると、当該モータ30(38)による施療子15の動作スピードが遅くなる構成となっている。このため、このマッサージユニット5(施療子15)によるマッサージ動作は、施療子15に反力が作用していない状態に比べて、時間遅延が発生する構成である。また、前記反力がさらに大きくなると(使用者の体重が重くなると)、この時間遅延はさらに増大する。
【0022】
また、このマッサージ機は、後にも説明するが、予め設定し記憶させてあるマッサージプログラム(マッサージコース)に従って動作することができるものであり、このマッサージプログラムは、マッサージユニット5を動作させるための複数のメカ動作ステップと、これと並行し、前記エアセルを動作させるための複数のエア動作ステップとを有している。なお、マッサージユニット5の動作には、施療子15が動かないで待機している動作も含み、また、エアセルの動作には、エアセルが収縮している動作も含む。
そして、あるメカ動作ステップ(後述する図6のメカ動作ステップM3)において、マッサージユニット5を昇降させ、施療子15を使用者の腰部と肩部との間を転がすようなマッサージ動作(以下、ローリング動作という)を行う場合、使用者の身長が、このマッサージ機において最小と設定している身長よりも高いと、ローリング動作の範囲が広くなる(距離が長くなる)ため、そのステップ(M3)におけるマッサージ時間が長くなる(時間遅延が発生する)。そして、この時間遅延は使用者の身長が高くなるほど、大きくなる。
以上のように、このマッサージユニット5は、使用者の体格(体重、身長)によって、時間遅延が発生することがある構成となっている。
【0023】
一方、前記エア式マッサージ部では、エアセルは設定された時間(図5と図6とのt1,t2,t3,t4,t5)で膨張しその後収縮する膨縮動作を繰り返すように構成されている。このため、使用者の体重が大きくなりエアセルに作用する反力(負荷)が増大したとしても、エアセルに反力が作用していない場合に対して遅れが生じない。つまり、エアセルによるマッサージ動作に時間遅延は生じない構成としている。
【0024】
マッサージプログラム(マッサージコース)に、前記ローリング動作を行うメカ動作ステップが含まれている場合、このマッサージ機は使用者の肩位置の検出を行う。これは、マッサージユニット5の昇降範囲(上下方向の移動範囲)を設定するためである。このために、マッサージ機は肩位置検出部(図示せず)を有している。この肩位置検出部は、マッサージ機が備えている制御部(後述する第1制御部7a)によって実行される機能部であり、施療子15を利用して肩位置の検出を行う。施療子15又はこれと一体として動作する他の動作部材(例えば前記支持アーム35)に圧力センサ(図示せず)が取り付けられており、肩位置検出部は、施療子15が使用者の背中に当っている状態でマッサージユニット5を昇降させ、前記センサの出力に基づいて使用者の肩位置を検出する。つまり、施療子15が肩位置にある場合では、使用者から当該施療子15が受ける荷重(体重)は、他の位置にある場合よりも小さくなるため、この荷重の変化を肩位置検出部が検出する。また、肩位置検出部の変形例としては、前記センサを、前記支持アーム35の揺動による位置変化(姿勢変化)を検出する位置検出センサとすることができ、肩位置検出部は、施療子15が肩位置に到達することによる支持アーム35の位置変化を検出する。
【0025】
図4はこのマッサージ機の概略のブロック図である。このマッサージ機は、第1制御部7aと第2制御部7bとを備えており、制御部7a,7bは、CPU、メモリ(RAM)及び記憶部(ROM)8を有するプログラマブルなマイコンよりなり、このマッサージ機において駆動する各部分の動作制御等のための処理を行う。なお、第1制御部7aと第2制御部7bとは一つのマイコンからなるものとすることができる。そして、この第1制御部7a及び第2制御部7bは所定の各機能を実行する制御プログラムを記憶部8に格納してあり、第1制御部7a(第1制御部7aが機能部として有している肩位置検出部)及び第2制御部7b(第2制御部7bが機能部として有している動作終了部25)は、この制御プログラムの実行により機能することができる。
【0026】
前記マッサージプログラムは記憶部8に記憶されている。そして、このマッサージプログラムに従って、第1制御部7aは、前記マッサージユニット5を動作させ複数のメカ動作ステップを逐次実行する制御を行い、第2制御部7bは、前記エア式マッサージ部(エアセル)を動作させ複数のエア動作ステップを逐次実行する制御を行う。
【0027】
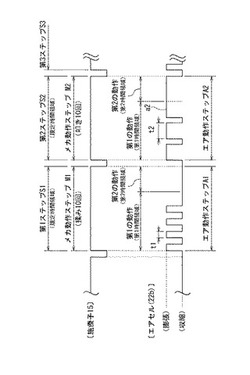
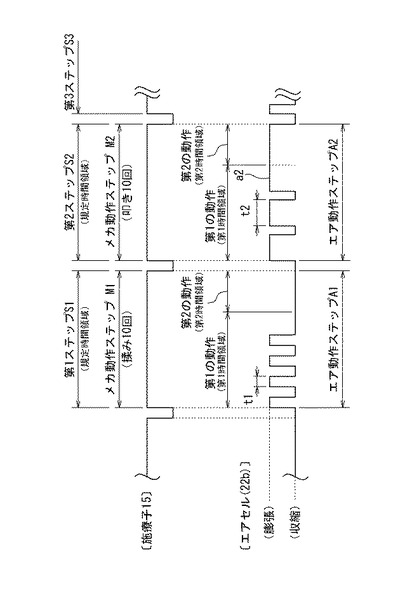
図5と図6とは前記マッサージプログラムの一部(途中)のステップを示している説明図である。図5と図6とに示しているステップにおいて、マッサージプログラムの前側から順に(左から順に)第1ステップS1、第2ステップS2、第3ステップS3、第4ステップS4が進行する。
【0028】
図5において、第1ステップS1は、施療子15が動作する第1メカ動作ステップM1と、これと並行し(これと共に行われ)エアセルが動作する第1エア動作ステップA1とからなる。第1メカ動作ステップM1では、施療子15が揉みマッサージ動作を10回行うように規定された動作(施療子15による規定動作)が実行される。第1エア動作ステップA1では、エアセルが時間t1について膨張しその後収縮する動作を複数回(図例では4回)繰り返すように規定された第1の動作、及び、後述する当該エアセルによる第2の動作が実行される。つまり、第1エア動作ステップA1は、エアセルに第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エアセルに第2の動作を行わせる第2時間領域とからなる。なお、この第1時間領域の時間は、第1メカ動作ステップM1が最も短い場合の時間と同じ又はこの時間よりも短く設定されている。第1メカ動作ステップM1が最も短い場合とは、施療子15に対して負荷が作用していない状態のときの時間である。
【0029】
第2ステップS2は、施療子15が動作する第2メカ動作ステップM2と、これと並行しエアセルが動作する第2エア動作ステップA2とからなる。第2メカ動作ステップM2では、施療子15が叩きマッサージ動作を10回行うように規定された動作(施療子15による規定動作)が実行される。第2エア動作ステップA2では、エアセルが時間t2について膨張しその後収縮する動作を複数回(図例では3回)繰り返すように規定された第1の動作、及び、後述する当該エアセルによる第2の動作が実行される。つまり、第2エア動作ステップA2は、エアセルに第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エアセルに第2の動作を行わせる第2時間領域とからなる。なお、この第1時間領域の時間は、第2メカ動作ステップM2が最も短い場合の時間と同じ又はこの時間よりも短く設定されている。第2メカ動作ステップM2が最も短い場合とは、施療子15に対して負荷が作用していない状態のときの時間である。
【0030】
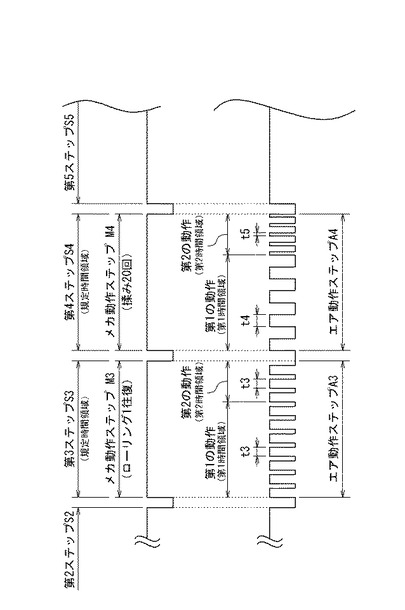
図6において、第3ステップS3は、施療子15が動作する第3メカ動作ステップM3と、これと並行しエアセルが動作する第3エア動作ステップA3とからなる。第3メカ動作ステップM3では、施療子15を使用者の腰部と肩部との間を転がすようなローリング動作を1往復行うように規定された動作(施療子15による規定動作)が実行される。第3エア動作ステップA3では、エアセルが時間t3について膨張しその後収縮する動作を複数回(図例では7回)繰り返すように規定された第1の動作、及び、後述する当該エアセルによる第2の動作が実行される。つまり、第3エア動作ステップA3は、エアセルに第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エアセルに第2の動作を行わせる第2時間領域とからなる。なお、この第1時間領域の時間は、第3メカ動作ステップM3が最も短い場合の時間と同じ又はこの時間よりも短く設定されている。第3メカ動作ステップM3が最も短い場合とは、施療子15に対して負荷が作用しておらず、かつ、使用者の身長(ローリング動作の距離)を最小として設定した状態のときの時間である。
【0031】
第4ステップS4は、施療子15が動作する第4メカ動作ステップM4と、これと並行しエアセルが動作する第4エア動作ステップA4とからなる。第4メカ動作ステップM4では、施療子15が揉みマッサージ動作を20回行うように規定された動作(施療子15による規定動作)が実行される。第4エア動作ステップA4では、エアセルが時間t4について膨張しその後収縮する動作を複数回(図例では4回)繰り返すように規定された第1の動作、及び、後述する当該エアセルによる第2の動作が実行される。つまり、第4エア動作ステップA4は、エアセルに第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エアセルに第2の動作を行わせる第2時間領域とからなる。なお、この第1時間領域の時間は、第4メカ動作ステップM4が最も短い場合の時間と同じ又はこの時間よりも短く設定されている。第4メカ動作ステップM4が最も短い場合とは、施療子15に対して負荷が作用していない状態のときの時間である。
【0032】
このように、第1制御部7a及び第2制御部7bは、第1ステップS1とその次の第2ステップS2、この第2ステップS2とその次の第3ステップS3、及び、この第3ステップS3とその次の第4ステップS4において、施療子15に規定動作を行わせ、かつ、エアセルに第1の動作を行わせている。なお、この施療子15による規定動作及びエアセルによる第1の動作はそれぞれ、各ステップにおいて、被施療部に対して適切な施療作用を与えるために必要とされる動作である。
さらに、各ステップにおいて、第1制御部7aが施療子15に規定動作を行わせている間に、第2制御部7bは、エアセルによる第1の動作の他に、次のステップで施療子15の動作開始に合わせて当該エアセルを動作させるための準備となる第2の動作を行わせている。この第2の動作についての具体例は、以下で説明する。
【0033】
また、第2制御部7bが機能部として有している前記動作終了部25(図4参照)は、エア動作ステップを、これと共に行われるメカ動作ステップの終了に基づいて終了させる機能を有している。さらに説明すると、並行しているメカ動作ステップとエア動作ステップとにおいて、動作終了部25は、メカ動作ステップの終了と同時にエア動作ステップを終了させる。この具体的な手段として、後に具体例を説明するが、動作終了部25は、エア動作ステップにおける第2時間領域の長さを変更することにより、メカ動作ステップの終了に合わせてエア動作ステップ(第2の動作)を終了させている。
【0034】
また、メカ動作ステップにおける、施療子15による前記規定動作及びその他の(図外のメカ動作ステップにより行われる)マッサージ動作は、背凭れ部3において行われるものであるのに対して、これと共に行われるエア動作ステップにおける、エアセルにより行われる動作(第1の動作、第2の動作)及びその他の(図外のエア動作ステップにより行われる)マッサージ動作は、背凭れ部3のエアセル、座部1のエアセル、フットレスト2のエアセルのうちの少なくとも一つにより行われるものであればよく、また、動作するエアセルを、ステップ毎に変更させてもよく又は同じであってもよい。そこで、以下の形態では、施療子15と並行して動作するエアセルとして、フットレスト2に設けたエアセル22b(図1参照)に着目して説明する。なお、以下の形態の各ステップにおいて、エアセル22bの他のエアセルが同時に動作していてもよい。
【0035】
第1制御部7a及び第2制御部7bによる制御を具体的に説明する。
図5において、第1エア動作ステップA1におけるエアセル22bの第2の動作は、収縮状態としている動作である。つまり、第1メカ動作ステップM1では、規定動作として施療子15が揉みマッサージ動作を10回行っている間に、第1エア動作ステップA1の第1時間領域において、第1の動作として、エアセル22bは時間t1について膨張しその後収縮する動作を繰り返した後、引き続いて、第2時間領域において、第2の動作として、当該エアセル22bを収縮した状態としている。
そして、施療子15による規定動作(第1メカ動作ステップM1)に時間遅延が生じている場合、第2制御部7bが有する動作終了部25(図4参照)は、エアセル22bを膨張させることなく収縮させた状態とし、この状態を、施療子15による規定動作が終了するまで延長(変更)することにより、施療子15による規定動作の終了に合わせてエアセル22bの収縮状態を解除し、膨張可能な状態に準備させる。
【0036】
次の第2ステップS2が開始されると、規定動作として施療子15が叩き動作を開始するとともに、エアセル22bは収縮状態から膨張動作(第1の動作)を迅速に開始することができる。このように、エアセル22bの第2の動作を、収縮状態としていることで、次の第2エア動作ステップA2の開始と同時に、エアセル22bは膨張を開始することが可能となる。すなわち、第1エア動作ステップA1におけるエアセル22bの前記第2の動作は、次のステップA2において当該エアセル22bを膨張させるための準備動作であるといえる。
【0037】
図5において、第2ステップS2(第2エア動作ステップA2)におけるエアセル22bの第2の動作は、膨張状態としている動作である。つまり、第2メカ動作ステップM2では、規定動作として施療子15が叩きマッサージ動作を10回行っている間に、第2エア動作ステップA2の第1時間領域において、第1の動作として、エアセル22bは時間t2について膨張しその後収縮する動作を繰り返した後、引き続いて、第2時間領域において、第2の動作として、当該エアセル22bは膨張した状態で維持される。なお、この場合、エアセル22bが第1の動作の最終回(図5のa2)で膨張すると、当該エアセル22bはそのまま膨張した状態で維持されており、この維持された膨張状態を第2の動作としている。
【0038】
そして、施療子15による規定動作(第2メカ動作ステップM2)に時間遅延が生じている場合、動作終了部25(図4参照)は、エアセル22bの膨張状態を、施療子15による規定動作が終了するまで延長(変更)することにより、施療子15による規定動作の終了に合わせてエアセル22bの膨張状態を終了する。
そして、施療子15が規定動作を終えると、エアセル22bは収縮した状態となり、次の第3ステップS3が開始されると、規定動作として施療子15がローリング動作を開始するとともに、当該エアセル22bは第1の動作(膨張動作)を開始する。
【0039】
図6において、第3ステップS3(第3エア動作ステップA3)におけるエアセル22bの第2の動作は、当該エアセル22bによる第1の動作を継続する動作である。つまり、第3メカ動作ステップM3では、規定動作として施療子15がローリング動作を1往復行っている間に、第3エア動作ステップA3の第1時間領域において、第1の動作として、エアセル22bは時間t3についてエアセル22bが膨張しその後収縮する動作を繰り返した後、引き続いて、第2時間領域において、第2の動作として、当該エアセル22bが時間t3について膨張しその後収縮する動作を繰り返して行う。
【0040】
そして、施療子15による規定動作(第3メカ動作ステップM3)に時間遅延が生じている場合、動作終了部25(図4参照)は、エアセル22bによる第2の動作としての膨縮動作を、施療子15による規定動作が終了するまで延長(変更)することにより、施療子15による規定動作の終了に合わせてエアセル22bの第2の動作を終了させる。
次の第4ステップS4が開始されると、規定動作として施療子15が揉みマッサージ動作を開始するとともに、エアセル22bは膨縮動作(第1の動作)を開始する。
【0041】
第4ステップS4(第4エア動作ステップA4)におけるエアセル22bの準備動作(第2の動作)は、当該エアセル22bが第1の動作と異なる動作で膨縮する調整動作である。この調整動作は、例えばエアセル22bの動作が行われていることを使用者に対して表現している演出的な動作であり、この演出的な動作は、施療よりも次の動作のための「つなぎ」としての機能を有する程度のものである。また、この調整動作は、第1の動作で行われている膨張時間t4よりも短い膨張時間t5で膨縮しこれを繰り返す動作とするのが好ましい。これは、第4ステップS4において、施療子15が規定動作を終えた時にエアセル22bが膨張途中乃至膨張状態であっても、膨張時間t5が短く設定されているためにエアセル22bは迅速に収縮することができ、次の第5ステップS5が開始されるまでの時間(移行時間)の間に、エアセル22bは収縮状態となることができ、当該ステップS5の開始と同時に当該エアセル22bは膨張することができるためである。なお、調整動作は、もちろん施療作用を有するものであってもよい。
【0042】
この第4ステップS4では、規定動作として施療子15が揉みマッサージ動作を20回行っている間に、第1時間領域において、第1の動作として、エアセル22bは、時間t4についてエアセル22bが膨張しその後収縮する動作を繰り返した後、引き続いて、第2時間領域において、第2の動作として、エアセル22bが膨張しその後収縮する動作を繰り返して行う。
そして、施療子15による規定動作(第4メカ動作ステップM4)に時間遅延が生じている場合、動作終了部25(図4参照)は、エアセル22bによる第2の動作としての膨縮動作を、施療子15による規定動作が終了するまで延長(変更)することにより、施療子15による規定動作の終了に合わせてエアセル22bの第2の動作を終了させる。
次の第5ステップS5が開始されると、施療子15が規定動作を開始するとともに、エアセル22bは膨縮動作(第1の動作)を開始することができる。
【0043】
このように、図5と図6とにおいて、メカ動作ステップは、施療子15が規定動作を行う時間として規定時間領域を有しており、エア動作ステップは、このメカ動作ステップと共に開始されエアセルによって第1の動作を行う第1時間領域と、この第1時間領域の後から開始し当該メカ動作ステップと共に終了する第2時間領域とを有している。そして、メカ動作ステップの規定時間領域に施療子15は規定動作を行い、この間において、エア動作ステップの第1時間領域にエアセルは第1の動作を行い、かつ、その後の第2時間領域に当該エアセルは第2の動作を行うこととなる。そして、メカ動作ステップの規定時間領域は、前記のとおり使用者の体型に応じて時間遅延が生じ、長く変化することがあるが、この場合であっても、第2制御部7bの動作終了部25の機能によって、エア動作ステップにおける第2時間領域を延長させ、メカ動作ステップとエア動作ステップとを同時に終了させている。そして、エアセルによる第1の動作は、図示したステップのそれぞれにおいて必ず実行されており、エアセルによる施療効果を確保している。
【0044】
このために、第2制御部7bの動作終了部25は、エア動作ステップにおいて、エアセルの第2の動作の終了について、第1の制御部7aから生じるメカ動作ステップ(施療子15の規定動作)の終了信号をトリガとして制御しており、第2制御部7bは、メカ動作ステップの終了に合わせてエア動作ステップ(第2の動作)を同時に終了させている。したがって、メカ動作ステップにおいて、前記のとおり時間遅延が生じていても、エア動作ステップが先行してしまうことを防止できる。
そして、現在進行しているステップにおいて、施療子15による規定動作中に、エアセルは、第1の動作の他に、次のステップで施療子15と共に動作を開始するための準備となる第2の動作を行うことにより、当該次のステップにおいて、施療子15の動作に合わせてエアセルは動作することができる。このように、施療子15による規定動作の終了と共にエアセルによる第2の動作を終了させることで、各ステップにおいて、施療子15による動作とエアセルによる動作とに関連性を持たせることができる。
以上より、マッサージプログラムにおいて、
【0045】
また、前記マッサージプログラムは、各ステップにおいて、施療子15によるマッサージ動作とエアセルによるマッサージ動作との関連性を高めるように設定されている。すなわち、一つのステップにおいて、施療子15によって施療作用を生じさせるための規定動作をしている際に、エアセルは、その施療作用をさらに向上させる第1の動作を行う。具体的には、背凭れ部3において、施療子15により肩部に対して「肩こり」についての施療作用のあるマッサージ動作(規定動作)をしている際に、その「肩こり」についての施療作用をさらに向上させる部位に対応するエアセルが選択され動作(第1の動作)するように、メカ動作ステップ及びエア動作ステップは設定されている。つまり、肩こりについての施療作用のあるツボが存在している身体の部位に対応するエアセルを動作させる。例えば、あるメカ動作ステップが、施療子15が肩に対して揉み動作又は叩き動作を行うものである場合、これに並行するエア動作ステップは、肩を押圧するエアセル23a(図1参照)を膨縮動作させるものとするのがよい。または、並行するエア動作ステップを、「肩こり」に効く足首側面付近に存在する陽輔のツボを押圧するエアセル22b及び/又は22dを膨縮動作させるものとするのがよい。なお、このエア動作ステップで、エアセル23aとともに、エアセル22b及び/又は22dを膨縮動作させてもよい。
または、施療子15によって「リラックス」させる施療作用のあるマッサージ動作をしている際に、その「リラックス」作用をさらに向上させる部位に対応するエアセルを選択し動作させる。なお、これら場合、動作させるエアセルを、背凭れ部3のものとしてもよいが、背凭れ部3以外(例えばフットレスト2)のエアセルが選択されていてもよい。
【0046】
また、施療子15によるマッサージ動作に対する、エアセルによるマッサージ動作の関連付けは、前記のように動作させるエアセルの選択と同時に、又はこの選択以外として、施療子15によって(肩部に対して肩こりについての)施療作用のあるマッサージ動作をしている際に、その(肩こりについての)施療作用をさらに向上させる動作速度(膨縮動作の周期)でエアセルを動作させるように、コースは設定され、第1及び第2制御部7a,7bにより実行されるのが好ましい。又は、施療子15の動作速度とエアセルの動作速度とを合わせるように関連付けるのが好ましい。
【0047】
図7は、メカ動作ステップにおける施療子15の動作速度と、エア動作ステップにおけるエアセルの動作速度(膨縮周期)とを関連付けした場合のマッサージコースの一部を示している説明図である。この図7において、第1制御部7aは、第1メカ動作ステップM1において、施療子15に低速で(長い周期で往復動作を繰り返す)揉みマッサージ動作を10回行わせ、これと並行する第1エア動作ステップA1において、第2制御部7bは、エアセルを低速で(長い周期で)所定時間(所定回数)について膨縮を繰り返す動作(第1の動作)を行わせる。つまり、第2制御部7bは、第1メカ動作ステップM1と並行する第1エア動作ステップA1において、当該メカ動作ステップM1での施療子15の遅い動作速度と関連付けた遅い動作速度で、エアセルを動作させている。つまり、施療子15とエアセル22bとの間の関連付けを、動作速度を遅くして一致させている。
【0048】
そして、次の第2メカ動作ステップM2において、第1制御部7aは、施療子15にステップM1よりも高速で(短い周期で往復動作を繰り返す)揉みマッサージ動作を10回行わせ、これと並行する第2エア動作ステップA2において、第2制御部7bは、エアセルをステップA1よりも高速で(短い周期で)所定時間(所定回数)について膨縮を繰り返す動作を行わせる。つまり、第2制御部7bは、第1メカ動作ステップM1から次の第2メカ動作ステップM2で行われる施療子15の動作速度の変化(速度の増大)に合わせて、第2エア動作ステップA2においてエアセルの動作速度を変化(速度を増大)させている。なお、施療子15の動作速度の変更は、図3の揉み用モータ30(叩き用モータ38)の回転速度を変更することにより実現できる。また、エアセルの動作速度の変更は、エアユニット(図示せず)におけるエアの給排の切り替えタイミングを変更することにより実現できる。
【0049】
さらに、その次の第3メカ動作ステップM3において、第1制御部7aは、施療子15にステップM2よりも高速で(短い周期で)往復動作を繰り返す動作(叩き動作)を10回行わせ、これと並行する第3エア動作ステップA3において、第2制御部7bは、エアセルをステップA2よりも高速で(短い周期で)所定時間(所定回数)について膨縮を繰り返す動作を行わせる。この場合においても、第2制御部7bは、第2メカ動作ステップM2から次の第3メカ動作ステップM3で行われる施療子15の動作速度の変化(速度のさらなる増大)に合わせて、第3エア動作ステップA3においてエアセルの動作速度を変化(速度をさらに増大)させている。
【0050】
このように、図7の左から右へとステップが進むにつれて、第1制御部7aが施療子15の動作を周期の長いものから短いものに移行させるのに合わせて、第2制御部7bは、エアセルの膨縮動作についても周期の長いものから短いものに移行させている。これにより、各ステップにおいて、両者の動作のリズム(動作速度)を同様(完全に一致又は略一致)のものに合わせている。
なお、これとは反対に、図7の右から左へとステップが進む場合であってもよく、この場合、第1制御部7aによる施療子15の動作を周期の短いものから長いものに移行させるのに合わせて、第2制御部7bは、エアセルの膨縮動作についても周期の短いものから長いものに移行させ、両者の動作のリズムを合わせている。
【0051】
以上より、マッサージプログラムの各ステップにおいて、施療子15によるマッサージ動作とエアセルによるマッサージ動作との関連性を高めることができ、第1及び第2制御部7a,7bがこのステップに従って施療子15及びエアセルを動作させることにより、より一層効果の高いマッサージが可能となる。
【0052】
また、この発明のマッサージ機は、図示する形態に限らずこの発明の範囲内において他の形態のものであっても良く、マッサージプログラムにおいて、施療子15のみが動作しているステップ、又は、エアセルのみが動作するステップを有していてもよい。また、施療子15による前記規定動作、エアセルによる第1の動作及び第2の動作は、説明したもの以外のマッサージ動作であってもよい。
【図面の簡単な説明】
【0053】
【図1】この発明のマッサージ機の実施の一形態を示す斜視図である。
【図2】マッサージユニットの前方からの斜視図である。
【図3】マッサージユニットの後方からの斜視図である。
【図4】このマッサージ機の概略のブロック図である。
【図5】マッサージプログラムの一部を示している説明図である。
【図6】図5のマッサージプログラムの続きを示している説明図である。
【図7】施療子の動作速度とエアセルの動作速度とを関連付けしたマッサージコースの一部を示している説明図である。
【符号の説明】
【0054】
1 座部
2 フットレスト
3 背凭れ部
5 マッサージユニット(機械式マッサージ部)
7a 第1制御部
7b 第2制御部
15 施療子
20a 座部用エア式マッサージ部
20b 脚用エア式マッサージ部
20c 背凭れ部用エア式マッサージ部
21a,21b,21c エアセル
22a,22b,22c,22d,22e エアセル
23a,23b,23c エアセル
25 動作終了部
30 揉み用モータ
38 叩き用モータ
【技術分野】
【0001】
この発明は、施療子とエアセルとを有しているマッサージ機に関する。
【背景技術】
【0002】
マッサージ機において、マッサージ具として施療子(モミ玉)とエアセルとの双方を備えたものが知られている(例えば、特許文献1参照)。施療子によるマッサージは、モータのトルクが減速器部(ギア部)及び駆動軸を介してアームに伝わり、このアームに取り付けられた前記施療子が揉みや叩き等の動作を行うことにより得られる。一方、エアセルによるマッサージは、マッサージ機が有しているエアユニットから空気が供給されると、エアセルは膨張し、被施療部(使用者の身体の各部)を押圧することにより得られる。
そして、このようなマッサージ機が備えている制御部は、マッサージプログラム(マッサージコース)を記憶してあり、このマッサージプログラムに従って施療子とエアセルとを動作させている。このマッサージプログラムでは、施療子とエアセルとがそれぞれ所定の動作を行うように設定されている。
【0003】
【特許文献1】特開2004−358277号公報(図1参照)
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記マッサージ機において、エアセルは使用者の体型に関係なくマッサージプログラムを予定時間とおりで終了することができるが、施療子によるマッサージ動作は、使用者の体型によって予定時間に対して遅延することがある。これは、エアセルは設定された周期で膨縮を繰り返すように構成されていることから、使用者の体重が大きくなってエアセルに作用する負荷が増大しても、予定時間に対して遅れが生じない。一方、施療子によるマッサージでは、この施療子に使用者の体重が作用し、当該施療子を動作させるためのモータに大きな負荷が作用すると、モータによる施療子の動作スピードが遅くなる。このため、施療子による動作に時間遅延が生じる。
【0005】
このように従来のマッサージ機では、施療子の動作に前記のような時間遅延が生じた場合に、マッサージプログラムにおいて、施療子による動作の終了時間がエアセルによる動作の終了時間よりも大きく遅れることがある。
そこで、この発明は、エアセルによる動作に対して施療子による動作が大きく遅れることを防止することのできるマッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するためのこの発明のマッサージ機は、モータを動力として動作する施療子を有する機械式マッサージ部と、エアの給排により膨縮動作するエアセルを有するエア式マッサージ部と、前記機械式マッサージ部を動作させ複数のメカ動作ステップを逐次実行する第1制御部と、前記エア式マッサージ部を動作させ前記メカ動作ステップと並行するエア動作ステップを逐次実行する第2制御部とを備え、前記第2制御部は、前記エア動作ステップを、これと並行する前記メカ動作ステップの終了に基づいて終了させるものである。
【0007】
このマッサージ機によれば、エア動作ステップと、これと並行するメカ動作ステップとのうち、メカ動作ステップに時間遅延が発生しても、第2制御部は、このメカ動作ステップの終了に基づいて、エア動作ステップを終了させる。このため、エアセルによる動作に対して施療子による動作が大きく遅れることを防止することができる。
【0008】
また、前記エア動作ステップは、前記エア式マッサージ部に第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エア式マッサージ部に第2の動作を行わせる第2時間領域とからなり、前記第2制御部は、前記第2時間領域の長さを変更することにより、前記メカ動作ステップの終了に合わせて前記エア動作ステップを終了させるのが好ましい。
これによれば、メカ動作ステップの終了に合わせてエア動作ステップを終了させるために、第2制御部は、エア動作ステップにおける第2時間領域の長さを変更する構成であるため、このエア動作ステップでは、第1時間領域において第1の動作を必ず実行させ完了することができる。このため、例えば、第1の動作を、そのエア動作ステップにおいて施療に必要な動作として設定しておけば、当該エア動作ステップにおいて、使用者に対して目的とする施療の効果を与えることができる。
【0009】
また、前記マッサージ機において、前記第2の動作を、前記エアセルを収縮状態としている動作とすることができる。この場合、メカ動作ステップが終了すると、エアセルが収縮状態でエア動作ステップは終了する。このため、例えば、次のエア動作ステップでエアセルは直ぐに膨張動作が可能となる。したがって、次のエア動作ステップが、開始と同時にエアセルを膨張動作させる場合に好ましい。
また、前記マッサージ機において、前記第2の動作を、前記エアセルを膨張状態としている動作とすることができる。この場合、メカ動作ステップが終了するまで、エアセルを膨張状態として被施療部に対して作用を与えた状態とすることができる。
【0010】
また、前記マッサージ機において、前記第1の動作は、エアセルが膨縮を繰り返す動作であり、前記第2の動作を、前記第1の動作と同じ動作とすることができる。この場合、メカ動作ステップが終了するまで、エアセルが膨縮を繰り返す動作を継続することができる。
また、前記マッサージ機において、前記第1の動作は、エアセルが膨縮を繰り返す動作であり、前記第2の動作を、前記第1の動作と異なる膨縮動作とすることができる。この場合、メカ動作ステップが終了するまで、エアセルに第1の動作と異なる第2動作を行わせ被施療部に対して作用を与えた状態とすることができる。例えば、第1動作をそのエア動作ステップにおいて施療に必要な動作とし、第2動作をエアセルが動作していることを使用者に対して表現している演出的な動作とすることができ、この演出的な動作は、次のステップでの動作のための「つなぎ」としての機能を有するものとすることができる。
【0011】
また、前記マッサージ機において、前記第2制御部は、前記メカ動作ステップと並行する前記エア動作ステップにおいて、当該メカ動作ステップでの前記機械式マッサージ部の動作と関連付けられた動作を前記エア式マッサージ部に行わせ、前記第2制御部は、前記メカ動作ステップから次のメカ動作ステップで行われる前記機械式マッサージ部の動作の変化に合わせて、次のエア動作ステップにおいて前記エア式マッサージ部の動作を変化させるのが好ましい。
これによれば、メカ動作ステップにおける機械式マッサージ部の動作と、これに並行するエア動作ステップにおけるエア式マッサージ部の動作とを関連付けたものとすることができ、そして、機械式マッサージ部の動作の変化に合わせて、エア式マッサージ部の動作を変化させるので、次のステップにおいても、両者の動作を関連付けたものとすることができる。
【発明の効果】
【0012】
この発明によれば、メカ動作ステップに時間遅延が発生しても、このメカ動作ステップの終了に基づいて、エア動作ステップを終了させることができるため、エアセルによる動作に対して施療子による動作が大きく遅れることを防止することができる。
【発明を実施するための最良の形態】
【0013】
以下、この発明の実施の形態を図面に基づいて説明する。
図1はこの発明のマッサージ機の実施の一形態を示す斜視図である。このマッサージ機は、使用者(被施療者)の臀部及び大腿部を支持する座部1と、使用者の脚を支持するフットレスト(脚載せ部)2と、使用者の背中を支持可能にする背凭れ部3と、左右両側に設けられ使用者の腕を支持する肘掛け部4とを備えた椅子型のものである。フットレスト2と背凭れ部3とは、電動駆動機構、流体圧駆動機構又は手動構造等により、座部4に対する角度変更が可能となっている。
【0014】
座部1には、使用者の臀部、大腿部を、下部及び側部からマッサージ(押圧)する座部用エア式マッサージ部20aが設けられており、このエア式マッサージ部20aは、複数のエアセル21a,21b,21cを有している。
フットレスト2には、使用者のふくらはぎ、足首、足の甲等の部分をマッサージ(押圧)する脚用エア式マッサージ部20bが設けられており、このエア式マッサージ部20bは、複数のエアセル22a,22b,22c,22d,22eを有している。
背凭れ部3には、使用者の左右の肩部、背中の左右両側部、腰の左右両側部をマッサージ(押圧)する背凭れ部用エア式マッサージ部20cが設けられており、このエア式マッサージ部20cは、複数のエアセル23a,23b,23cを有している。
【0015】
これらエアセルのそれぞれは設置場所に応じた形状となっており、各エアセルは例えば蛇腹形状であり膨張することができる。そして、座部1内に設けたエアユニット6によって、エアセルに対してエアの給排が行われることで、各エアセルは膨縮動作することができる。エアユニット6は切り替え制御弁(図示せず)等を有しており、マッサージ機が備えている第2制御部7b(図4参照)が、この切り替え制御弁を制御することにより、エアセルのそれぞれは独立して動作することができる。
【0016】
図1において、背凭れ部3には、使用者の肩部、背中及び腰部をマッサージするための施療子(モミ玉)15を備えているマッサージユニット(機械式マッサージ部)5が、上下方向に昇降自在に設けられている。このマッサージユニット5は、マッサージ機が備えている第1制御部7a(図4参照)によってその動作が制御される。背凭れ部3の内部には、上下方向に延びる左右一対のガイドレール(図示せず)が延設されており、この両ガイドレール間にマッサージユニット5が走行自在に設けられている。背凭れ部3は、中央部に開口部3aと、その両側に使用者の身体を支持する支持部3bとを有しており、施療子15は開口部3a内において昇降したり、揉みや叩き等の動作をしたりできる。なお、前記エアセル23a,23b,23cは、支持部3bに設けられている。また、背凭れ部3の前面部分は、布製又は革製の可撓性を有するカバー部材17によって覆われている。
【0017】
図2はマッサージユニット5の前方からの斜視図であり、図3は後方からの斜視図である。このマッサージユニット5は、背凭れ部3内において昇降自在である昇降フレーム11と、この昇降フレーム11に取り付けられ、使用者の身体(被施療部)をマッサージする施療子15を有する施療機構14を備えている。昇降フレーム11に昇降用モータ、減速器部(図示せず)及びローラ18が設けられており、前記第1制御部7aの制御信号に基づいてこのモータが回転することによりローラ18が転動し、マッサージユニット5はガイドレール(図示せず)に沿って自走することができる。
【0018】
図3において、施療機構14は、揉み用モータ30と、この揉み用モータ30と連結されモータ30の回転数を減速する減速ギア(ギア部)13と、左右両側へ延び減速ギア13の出力軸となっている揉み用駆動軸34と、駆動アーム33とを備えている。揉み用モータ30が回転駆動すると、減速ギア13を介して揉み用駆動軸34が回転する。揉み用駆動軸34の左右両側には、駆動軸34の軸心に対して偏角した(傾斜した)揉み用クランク軸32が固定されており、この左右の各クランク軸32に前記駆動アーム33の第1基端部が回動自在に取り付けられている。そして、図2において、この駆動アーム33の先端部に、ブーメラン状に湾曲した支持アーム35が、その中央屈曲部を中心として、回動自在に連結されている。この支持アーム35の上下各端部に、ローラよりなる前記施療子15が回転自在に取り付けられている。
【0019】
また、施療機構14は、叩き用駆動軸36と、この叩き用駆動軸36を回転可能に支持している軸受け部37と、叩き用駆動軸36を回転駆動する叩き用モータ38とを備えている。叩き用駆動軸36と叩き用モータ38の出力軸(図示せず)は伝動ベルト39によって連動連結されている。また、叩き用駆動軸36の左右両端部には、当該駆動軸36の軸心に対して偏心している偏心ピン40が固定されており、この偏心ピン40はユニバーサルジョイントよりなる伝動バー41を介して前記駆動アーム33の第2基端部に連動連結されている。
【0020】
この施療機構14によれば、第1制御部7a(図4参照)の動作指令信号によって、揉み用モータ30を作動させると、揉み用駆動軸34及び揉み用クランク軸32が回転駆動し、この回転によって駆動アーム33を介して両支持アーム35が左右に接近又は離反しつつ前後移動し、これによって四つの施療子15が人体に対して揉みマッサージ動作を行うようになっている。他方、第1制御部7aの動作指令信号によって、叩き用モータ38を作動させると、叩き用駆動軸36及び偏心ピン40が回転駆動し、この回転によって伝動バー41が駆動アーム33の第2基端部を高速で押し引きし、これによって四つの施療子15が細かく前後移動を繰り返す叩きマッサージ動作を行うようになっている。
【0021】
このように、マッサージユニット5は、モータ30(38)と施療子15との間において、複数の機械要素が連動連結された構成であり、施療子15はモータ30(38)を動力として動作し使用者に対してマッサージ動作を行うことができるが、この使用者から施療子15に作用する反力(負荷)に応じて当該モータ30(38)に作用する負荷が変化する構成である。したがって、使用者から施療子15に大きな反力が作用することにより、モータ30(38)に大きな負荷が作用すると、当該モータ30(38)による施療子15の動作スピードが遅くなる構成となっている。このため、このマッサージユニット5(施療子15)によるマッサージ動作は、施療子15に反力が作用していない状態に比べて、時間遅延が発生する構成である。また、前記反力がさらに大きくなると(使用者の体重が重くなると)、この時間遅延はさらに増大する。
【0022】
また、このマッサージ機は、後にも説明するが、予め設定し記憶させてあるマッサージプログラム(マッサージコース)に従って動作することができるものであり、このマッサージプログラムは、マッサージユニット5を動作させるための複数のメカ動作ステップと、これと並行し、前記エアセルを動作させるための複数のエア動作ステップとを有している。なお、マッサージユニット5の動作には、施療子15が動かないで待機している動作も含み、また、エアセルの動作には、エアセルが収縮している動作も含む。
そして、あるメカ動作ステップ(後述する図6のメカ動作ステップM3)において、マッサージユニット5を昇降させ、施療子15を使用者の腰部と肩部との間を転がすようなマッサージ動作(以下、ローリング動作という)を行う場合、使用者の身長が、このマッサージ機において最小と設定している身長よりも高いと、ローリング動作の範囲が広くなる(距離が長くなる)ため、そのステップ(M3)におけるマッサージ時間が長くなる(時間遅延が発生する)。そして、この時間遅延は使用者の身長が高くなるほど、大きくなる。
以上のように、このマッサージユニット5は、使用者の体格(体重、身長)によって、時間遅延が発生することがある構成となっている。
【0023】
一方、前記エア式マッサージ部では、エアセルは設定された時間(図5と図6とのt1,t2,t3,t4,t5)で膨張しその後収縮する膨縮動作を繰り返すように構成されている。このため、使用者の体重が大きくなりエアセルに作用する反力(負荷)が増大したとしても、エアセルに反力が作用していない場合に対して遅れが生じない。つまり、エアセルによるマッサージ動作に時間遅延は生じない構成としている。
【0024】
マッサージプログラム(マッサージコース)に、前記ローリング動作を行うメカ動作ステップが含まれている場合、このマッサージ機は使用者の肩位置の検出を行う。これは、マッサージユニット5の昇降範囲(上下方向の移動範囲)を設定するためである。このために、マッサージ機は肩位置検出部(図示せず)を有している。この肩位置検出部は、マッサージ機が備えている制御部(後述する第1制御部7a)によって実行される機能部であり、施療子15を利用して肩位置の検出を行う。施療子15又はこれと一体として動作する他の動作部材(例えば前記支持アーム35)に圧力センサ(図示せず)が取り付けられており、肩位置検出部は、施療子15が使用者の背中に当っている状態でマッサージユニット5を昇降させ、前記センサの出力に基づいて使用者の肩位置を検出する。つまり、施療子15が肩位置にある場合では、使用者から当該施療子15が受ける荷重(体重)は、他の位置にある場合よりも小さくなるため、この荷重の変化を肩位置検出部が検出する。また、肩位置検出部の変形例としては、前記センサを、前記支持アーム35の揺動による位置変化(姿勢変化)を検出する位置検出センサとすることができ、肩位置検出部は、施療子15が肩位置に到達することによる支持アーム35の位置変化を検出する。
【0025】
図4はこのマッサージ機の概略のブロック図である。このマッサージ機は、第1制御部7aと第2制御部7bとを備えており、制御部7a,7bは、CPU、メモリ(RAM)及び記憶部(ROM)8を有するプログラマブルなマイコンよりなり、このマッサージ機において駆動する各部分の動作制御等のための処理を行う。なお、第1制御部7aと第2制御部7bとは一つのマイコンからなるものとすることができる。そして、この第1制御部7a及び第2制御部7bは所定の各機能を実行する制御プログラムを記憶部8に格納してあり、第1制御部7a(第1制御部7aが機能部として有している肩位置検出部)及び第2制御部7b(第2制御部7bが機能部として有している動作終了部25)は、この制御プログラムの実行により機能することができる。
【0026】
前記マッサージプログラムは記憶部8に記憶されている。そして、このマッサージプログラムに従って、第1制御部7aは、前記マッサージユニット5を動作させ複数のメカ動作ステップを逐次実行する制御を行い、第2制御部7bは、前記エア式マッサージ部(エアセル)を動作させ複数のエア動作ステップを逐次実行する制御を行う。
【0027】
図5と図6とは前記マッサージプログラムの一部(途中)のステップを示している説明図である。図5と図6とに示しているステップにおいて、マッサージプログラムの前側から順に(左から順に)第1ステップS1、第2ステップS2、第3ステップS3、第4ステップS4が進行する。
【0028】
図5において、第1ステップS1は、施療子15が動作する第1メカ動作ステップM1と、これと並行し(これと共に行われ)エアセルが動作する第1エア動作ステップA1とからなる。第1メカ動作ステップM1では、施療子15が揉みマッサージ動作を10回行うように規定された動作(施療子15による規定動作)が実行される。第1エア動作ステップA1では、エアセルが時間t1について膨張しその後収縮する動作を複数回(図例では4回)繰り返すように規定された第1の動作、及び、後述する当該エアセルによる第2の動作が実行される。つまり、第1エア動作ステップA1は、エアセルに第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エアセルに第2の動作を行わせる第2時間領域とからなる。なお、この第1時間領域の時間は、第1メカ動作ステップM1が最も短い場合の時間と同じ又はこの時間よりも短く設定されている。第1メカ動作ステップM1が最も短い場合とは、施療子15に対して負荷が作用していない状態のときの時間である。
【0029】
第2ステップS2は、施療子15が動作する第2メカ動作ステップM2と、これと並行しエアセルが動作する第2エア動作ステップA2とからなる。第2メカ動作ステップM2では、施療子15が叩きマッサージ動作を10回行うように規定された動作(施療子15による規定動作)が実行される。第2エア動作ステップA2では、エアセルが時間t2について膨張しその後収縮する動作を複数回(図例では3回)繰り返すように規定された第1の動作、及び、後述する当該エアセルによる第2の動作が実行される。つまり、第2エア動作ステップA2は、エアセルに第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エアセルに第2の動作を行わせる第2時間領域とからなる。なお、この第1時間領域の時間は、第2メカ動作ステップM2が最も短い場合の時間と同じ又はこの時間よりも短く設定されている。第2メカ動作ステップM2が最も短い場合とは、施療子15に対して負荷が作用していない状態のときの時間である。
【0030】
図6において、第3ステップS3は、施療子15が動作する第3メカ動作ステップM3と、これと並行しエアセルが動作する第3エア動作ステップA3とからなる。第3メカ動作ステップM3では、施療子15を使用者の腰部と肩部との間を転がすようなローリング動作を1往復行うように規定された動作(施療子15による規定動作)が実行される。第3エア動作ステップA3では、エアセルが時間t3について膨張しその後収縮する動作を複数回(図例では7回)繰り返すように規定された第1の動作、及び、後述する当該エアセルによる第2の動作が実行される。つまり、第3エア動作ステップA3は、エアセルに第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エアセルに第2の動作を行わせる第2時間領域とからなる。なお、この第1時間領域の時間は、第3メカ動作ステップM3が最も短い場合の時間と同じ又はこの時間よりも短く設定されている。第3メカ動作ステップM3が最も短い場合とは、施療子15に対して負荷が作用しておらず、かつ、使用者の身長(ローリング動作の距離)を最小として設定した状態のときの時間である。
【0031】
第4ステップS4は、施療子15が動作する第4メカ動作ステップM4と、これと並行しエアセルが動作する第4エア動作ステップA4とからなる。第4メカ動作ステップM4では、施療子15が揉みマッサージ動作を20回行うように規定された動作(施療子15による規定動作)が実行される。第4エア動作ステップA4では、エアセルが時間t4について膨張しその後収縮する動作を複数回(図例では4回)繰り返すように規定された第1の動作、及び、後述する当該エアセルによる第2の動作が実行される。つまり、第4エア動作ステップA4は、エアセルに第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エアセルに第2の動作を行わせる第2時間領域とからなる。なお、この第1時間領域の時間は、第4メカ動作ステップM4が最も短い場合の時間と同じ又はこの時間よりも短く設定されている。第4メカ動作ステップM4が最も短い場合とは、施療子15に対して負荷が作用していない状態のときの時間である。
【0032】
このように、第1制御部7a及び第2制御部7bは、第1ステップS1とその次の第2ステップS2、この第2ステップS2とその次の第3ステップS3、及び、この第3ステップS3とその次の第4ステップS4において、施療子15に規定動作を行わせ、かつ、エアセルに第1の動作を行わせている。なお、この施療子15による規定動作及びエアセルによる第1の動作はそれぞれ、各ステップにおいて、被施療部に対して適切な施療作用を与えるために必要とされる動作である。
さらに、各ステップにおいて、第1制御部7aが施療子15に規定動作を行わせている間に、第2制御部7bは、エアセルによる第1の動作の他に、次のステップで施療子15の動作開始に合わせて当該エアセルを動作させるための準備となる第2の動作を行わせている。この第2の動作についての具体例は、以下で説明する。
【0033】
また、第2制御部7bが機能部として有している前記動作終了部25(図4参照)は、エア動作ステップを、これと共に行われるメカ動作ステップの終了に基づいて終了させる機能を有している。さらに説明すると、並行しているメカ動作ステップとエア動作ステップとにおいて、動作終了部25は、メカ動作ステップの終了と同時にエア動作ステップを終了させる。この具体的な手段として、後に具体例を説明するが、動作終了部25は、エア動作ステップにおける第2時間領域の長さを変更することにより、メカ動作ステップの終了に合わせてエア動作ステップ(第2の動作)を終了させている。
【0034】
また、メカ動作ステップにおける、施療子15による前記規定動作及びその他の(図外のメカ動作ステップにより行われる)マッサージ動作は、背凭れ部3において行われるものであるのに対して、これと共に行われるエア動作ステップにおける、エアセルにより行われる動作(第1の動作、第2の動作)及びその他の(図外のエア動作ステップにより行われる)マッサージ動作は、背凭れ部3のエアセル、座部1のエアセル、フットレスト2のエアセルのうちの少なくとも一つにより行われるものであればよく、また、動作するエアセルを、ステップ毎に変更させてもよく又は同じであってもよい。そこで、以下の形態では、施療子15と並行して動作するエアセルとして、フットレスト2に設けたエアセル22b(図1参照)に着目して説明する。なお、以下の形態の各ステップにおいて、エアセル22bの他のエアセルが同時に動作していてもよい。
【0035】
第1制御部7a及び第2制御部7bによる制御を具体的に説明する。
図5において、第1エア動作ステップA1におけるエアセル22bの第2の動作は、収縮状態としている動作である。つまり、第1メカ動作ステップM1では、規定動作として施療子15が揉みマッサージ動作を10回行っている間に、第1エア動作ステップA1の第1時間領域において、第1の動作として、エアセル22bは時間t1について膨張しその後収縮する動作を繰り返した後、引き続いて、第2時間領域において、第2の動作として、当該エアセル22bを収縮した状態としている。
そして、施療子15による規定動作(第1メカ動作ステップM1)に時間遅延が生じている場合、第2制御部7bが有する動作終了部25(図4参照)は、エアセル22bを膨張させることなく収縮させた状態とし、この状態を、施療子15による規定動作が終了するまで延長(変更)することにより、施療子15による規定動作の終了に合わせてエアセル22bの収縮状態を解除し、膨張可能な状態に準備させる。
【0036】
次の第2ステップS2が開始されると、規定動作として施療子15が叩き動作を開始するとともに、エアセル22bは収縮状態から膨張動作(第1の動作)を迅速に開始することができる。このように、エアセル22bの第2の動作を、収縮状態としていることで、次の第2エア動作ステップA2の開始と同時に、エアセル22bは膨張を開始することが可能となる。すなわち、第1エア動作ステップA1におけるエアセル22bの前記第2の動作は、次のステップA2において当該エアセル22bを膨張させるための準備動作であるといえる。
【0037】
図5において、第2ステップS2(第2エア動作ステップA2)におけるエアセル22bの第2の動作は、膨張状態としている動作である。つまり、第2メカ動作ステップM2では、規定動作として施療子15が叩きマッサージ動作を10回行っている間に、第2エア動作ステップA2の第1時間領域において、第1の動作として、エアセル22bは時間t2について膨張しその後収縮する動作を繰り返した後、引き続いて、第2時間領域において、第2の動作として、当該エアセル22bは膨張した状態で維持される。なお、この場合、エアセル22bが第1の動作の最終回(図5のa2)で膨張すると、当該エアセル22bはそのまま膨張した状態で維持されており、この維持された膨張状態を第2の動作としている。
【0038】
そして、施療子15による規定動作(第2メカ動作ステップM2)に時間遅延が生じている場合、動作終了部25(図4参照)は、エアセル22bの膨張状態を、施療子15による規定動作が終了するまで延長(変更)することにより、施療子15による規定動作の終了に合わせてエアセル22bの膨張状態を終了する。
そして、施療子15が規定動作を終えると、エアセル22bは収縮した状態となり、次の第3ステップS3が開始されると、規定動作として施療子15がローリング動作を開始するとともに、当該エアセル22bは第1の動作(膨張動作)を開始する。
【0039】
図6において、第3ステップS3(第3エア動作ステップA3)におけるエアセル22bの第2の動作は、当該エアセル22bによる第1の動作を継続する動作である。つまり、第3メカ動作ステップM3では、規定動作として施療子15がローリング動作を1往復行っている間に、第3エア動作ステップA3の第1時間領域において、第1の動作として、エアセル22bは時間t3についてエアセル22bが膨張しその後収縮する動作を繰り返した後、引き続いて、第2時間領域において、第2の動作として、当該エアセル22bが時間t3について膨張しその後収縮する動作を繰り返して行う。
【0040】
そして、施療子15による規定動作(第3メカ動作ステップM3)に時間遅延が生じている場合、動作終了部25(図4参照)は、エアセル22bによる第2の動作としての膨縮動作を、施療子15による規定動作が終了するまで延長(変更)することにより、施療子15による規定動作の終了に合わせてエアセル22bの第2の動作を終了させる。
次の第4ステップS4が開始されると、規定動作として施療子15が揉みマッサージ動作を開始するとともに、エアセル22bは膨縮動作(第1の動作)を開始する。
【0041】
第4ステップS4(第4エア動作ステップA4)におけるエアセル22bの準備動作(第2の動作)は、当該エアセル22bが第1の動作と異なる動作で膨縮する調整動作である。この調整動作は、例えばエアセル22bの動作が行われていることを使用者に対して表現している演出的な動作であり、この演出的な動作は、施療よりも次の動作のための「つなぎ」としての機能を有する程度のものである。また、この調整動作は、第1の動作で行われている膨張時間t4よりも短い膨張時間t5で膨縮しこれを繰り返す動作とするのが好ましい。これは、第4ステップS4において、施療子15が規定動作を終えた時にエアセル22bが膨張途中乃至膨張状態であっても、膨張時間t5が短く設定されているためにエアセル22bは迅速に収縮することができ、次の第5ステップS5が開始されるまでの時間(移行時間)の間に、エアセル22bは収縮状態となることができ、当該ステップS5の開始と同時に当該エアセル22bは膨張することができるためである。なお、調整動作は、もちろん施療作用を有するものであってもよい。
【0042】
この第4ステップS4では、規定動作として施療子15が揉みマッサージ動作を20回行っている間に、第1時間領域において、第1の動作として、エアセル22bは、時間t4についてエアセル22bが膨張しその後収縮する動作を繰り返した後、引き続いて、第2時間領域において、第2の動作として、エアセル22bが膨張しその後収縮する動作を繰り返して行う。
そして、施療子15による規定動作(第4メカ動作ステップM4)に時間遅延が生じている場合、動作終了部25(図4参照)は、エアセル22bによる第2の動作としての膨縮動作を、施療子15による規定動作が終了するまで延長(変更)することにより、施療子15による規定動作の終了に合わせてエアセル22bの第2の動作を終了させる。
次の第5ステップS5が開始されると、施療子15が規定動作を開始するとともに、エアセル22bは膨縮動作(第1の動作)を開始することができる。
【0043】
このように、図5と図6とにおいて、メカ動作ステップは、施療子15が規定動作を行う時間として規定時間領域を有しており、エア動作ステップは、このメカ動作ステップと共に開始されエアセルによって第1の動作を行う第1時間領域と、この第1時間領域の後から開始し当該メカ動作ステップと共に終了する第2時間領域とを有している。そして、メカ動作ステップの規定時間領域に施療子15は規定動作を行い、この間において、エア動作ステップの第1時間領域にエアセルは第1の動作を行い、かつ、その後の第2時間領域に当該エアセルは第2の動作を行うこととなる。そして、メカ動作ステップの規定時間領域は、前記のとおり使用者の体型に応じて時間遅延が生じ、長く変化することがあるが、この場合であっても、第2制御部7bの動作終了部25の機能によって、エア動作ステップにおける第2時間領域を延長させ、メカ動作ステップとエア動作ステップとを同時に終了させている。そして、エアセルによる第1の動作は、図示したステップのそれぞれにおいて必ず実行されており、エアセルによる施療効果を確保している。
【0044】
このために、第2制御部7bの動作終了部25は、エア動作ステップにおいて、エアセルの第2の動作の終了について、第1の制御部7aから生じるメカ動作ステップ(施療子15の規定動作)の終了信号をトリガとして制御しており、第2制御部7bは、メカ動作ステップの終了に合わせてエア動作ステップ(第2の動作)を同時に終了させている。したがって、メカ動作ステップにおいて、前記のとおり時間遅延が生じていても、エア動作ステップが先行してしまうことを防止できる。
そして、現在進行しているステップにおいて、施療子15による規定動作中に、エアセルは、第1の動作の他に、次のステップで施療子15と共に動作を開始するための準備となる第2の動作を行うことにより、当該次のステップにおいて、施療子15の動作に合わせてエアセルは動作することができる。このように、施療子15による規定動作の終了と共にエアセルによる第2の動作を終了させることで、各ステップにおいて、施療子15による動作とエアセルによる動作とに関連性を持たせることができる。
以上より、マッサージプログラムにおいて、
【0045】
また、前記マッサージプログラムは、各ステップにおいて、施療子15によるマッサージ動作とエアセルによるマッサージ動作との関連性を高めるように設定されている。すなわち、一つのステップにおいて、施療子15によって施療作用を生じさせるための規定動作をしている際に、エアセルは、その施療作用をさらに向上させる第1の動作を行う。具体的には、背凭れ部3において、施療子15により肩部に対して「肩こり」についての施療作用のあるマッサージ動作(規定動作)をしている際に、その「肩こり」についての施療作用をさらに向上させる部位に対応するエアセルが選択され動作(第1の動作)するように、メカ動作ステップ及びエア動作ステップは設定されている。つまり、肩こりについての施療作用のあるツボが存在している身体の部位に対応するエアセルを動作させる。例えば、あるメカ動作ステップが、施療子15が肩に対して揉み動作又は叩き動作を行うものである場合、これに並行するエア動作ステップは、肩を押圧するエアセル23a(図1参照)を膨縮動作させるものとするのがよい。または、並行するエア動作ステップを、「肩こり」に効く足首側面付近に存在する陽輔のツボを押圧するエアセル22b及び/又は22dを膨縮動作させるものとするのがよい。なお、このエア動作ステップで、エアセル23aとともに、エアセル22b及び/又は22dを膨縮動作させてもよい。
または、施療子15によって「リラックス」させる施療作用のあるマッサージ動作をしている際に、その「リラックス」作用をさらに向上させる部位に対応するエアセルを選択し動作させる。なお、これら場合、動作させるエアセルを、背凭れ部3のものとしてもよいが、背凭れ部3以外(例えばフットレスト2)のエアセルが選択されていてもよい。
【0046】
また、施療子15によるマッサージ動作に対する、エアセルによるマッサージ動作の関連付けは、前記のように動作させるエアセルの選択と同時に、又はこの選択以外として、施療子15によって(肩部に対して肩こりについての)施療作用のあるマッサージ動作をしている際に、その(肩こりについての)施療作用をさらに向上させる動作速度(膨縮動作の周期)でエアセルを動作させるように、コースは設定され、第1及び第2制御部7a,7bにより実行されるのが好ましい。又は、施療子15の動作速度とエアセルの動作速度とを合わせるように関連付けるのが好ましい。
【0047】
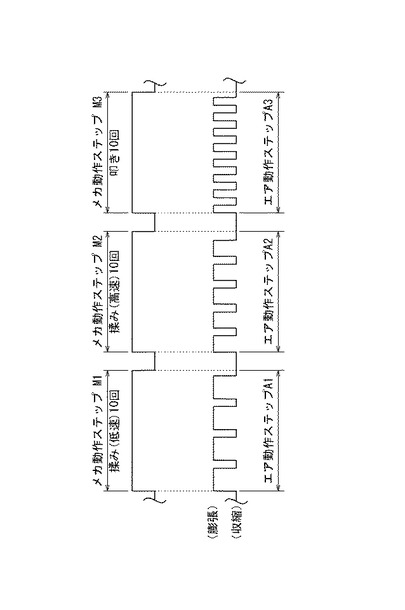
図7は、メカ動作ステップにおける施療子15の動作速度と、エア動作ステップにおけるエアセルの動作速度(膨縮周期)とを関連付けした場合のマッサージコースの一部を示している説明図である。この図7において、第1制御部7aは、第1メカ動作ステップM1において、施療子15に低速で(長い周期で往復動作を繰り返す)揉みマッサージ動作を10回行わせ、これと並行する第1エア動作ステップA1において、第2制御部7bは、エアセルを低速で(長い周期で)所定時間(所定回数)について膨縮を繰り返す動作(第1の動作)を行わせる。つまり、第2制御部7bは、第1メカ動作ステップM1と並行する第1エア動作ステップA1において、当該メカ動作ステップM1での施療子15の遅い動作速度と関連付けた遅い動作速度で、エアセルを動作させている。つまり、施療子15とエアセル22bとの間の関連付けを、動作速度を遅くして一致させている。
【0048】
そして、次の第2メカ動作ステップM2において、第1制御部7aは、施療子15にステップM1よりも高速で(短い周期で往復動作を繰り返す)揉みマッサージ動作を10回行わせ、これと並行する第2エア動作ステップA2において、第2制御部7bは、エアセルをステップA1よりも高速で(短い周期で)所定時間(所定回数)について膨縮を繰り返す動作を行わせる。つまり、第2制御部7bは、第1メカ動作ステップM1から次の第2メカ動作ステップM2で行われる施療子15の動作速度の変化(速度の増大)に合わせて、第2エア動作ステップA2においてエアセルの動作速度を変化(速度を増大)させている。なお、施療子15の動作速度の変更は、図3の揉み用モータ30(叩き用モータ38)の回転速度を変更することにより実現できる。また、エアセルの動作速度の変更は、エアユニット(図示せず)におけるエアの給排の切り替えタイミングを変更することにより実現できる。
【0049】
さらに、その次の第3メカ動作ステップM3において、第1制御部7aは、施療子15にステップM2よりも高速で(短い周期で)往復動作を繰り返す動作(叩き動作)を10回行わせ、これと並行する第3エア動作ステップA3において、第2制御部7bは、エアセルをステップA2よりも高速で(短い周期で)所定時間(所定回数)について膨縮を繰り返す動作を行わせる。この場合においても、第2制御部7bは、第2メカ動作ステップM2から次の第3メカ動作ステップM3で行われる施療子15の動作速度の変化(速度のさらなる増大)に合わせて、第3エア動作ステップA3においてエアセルの動作速度を変化(速度をさらに増大)させている。
【0050】
このように、図7の左から右へとステップが進むにつれて、第1制御部7aが施療子15の動作を周期の長いものから短いものに移行させるのに合わせて、第2制御部7bは、エアセルの膨縮動作についても周期の長いものから短いものに移行させている。これにより、各ステップにおいて、両者の動作のリズム(動作速度)を同様(完全に一致又は略一致)のものに合わせている。
なお、これとは反対に、図7の右から左へとステップが進む場合であってもよく、この場合、第1制御部7aによる施療子15の動作を周期の短いものから長いものに移行させるのに合わせて、第2制御部7bは、エアセルの膨縮動作についても周期の短いものから長いものに移行させ、両者の動作のリズムを合わせている。
【0051】
以上より、マッサージプログラムの各ステップにおいて、施療子15によるマッサージ動作とエアセルによるマッサージ動作との関連性を高めることができ、第1及び第2制御部7a,7bがこのステップに従って施療子15及びエアセルを動作させることにより、より一層効果の高いマッサージが可能となる。
【0052】
また、この発明のマッサージ機は、図示する形態に限らずこの発明の範囲内において他の形態のものであっても良く、マッサージプログラムにおいて、施療子15のみが動作しているステップ、又は、エアセルのみが動作するステップを有していてもよい。また、施療子15による前記規定動作、エアセルによる第1の動作及び第2の動作は、説明したもの以外のマッサージ動作であってもよい。
【図面の簡単な説明】
【0053】
【図1】この発明のマッサージ機の実施の一形態を示す斜視図である。
【図2】マッサージユニットの前方からの斜視図である。
【図3】マッサージユニットの後方からの斜視図である。
【図4】このマッサージ機の概略のブロック図である。
【図5】マッサージプログラムの一部を示している説明図である。
【図6】図5のマッサージプログラムの続きを示している説明図である。
【図7】施療子の動作速度とエアセルの動作速度とを関連付けしたマッサージコースの一部を示している説明図である。
【符号の説明】
【0054】
1 座部
2 フットレスト
3 背凭れ部
5 マッサージユニット(機械式マッサージ部)
7a 第1制御部
7b 第2制御部
15 施療子
20a 座部用エア式マッサージ部
20b 脚用エア式マッサージ部
20c 背凭れ部用エア式マッサージ部
21a,21b,21c エアセル
22a,22b,22c,22d,22e エアセル
23a,23b,23c エアセル
25 動作終了部
30 揉み用モータ
38 叩き用モータ
【特許請求の範囲】
【請求項1】
モータを動力として動作する施療子を有する機械式マッサージ部と、
エアの給排により膨縮動作するエアセルを有するエア式マッサージ部と、
前記機械式マッサージ部を動作させ複数のメカ動作ステップを実行する第1制御部と、
前記エア式マッサージ部を動作させ前記メカ動作ステップと並行するエア動作ステップを実行する第2制御部と、を備え、
前記第2制御部は、前記エア動作ステップを、これと並行する前記メカ動作ステップの終了に基づいて終了させることを特徴とするマッサージ機。
【請求項2】
前記エア動作ステップは、前記エア式マッサージ部に第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エア式マッサージ部に第2の動作を行わせる第2時間領域とからなり、
前記第2制御部は、前記第2時間領域の長さを変更することにより、前記メカ動作ステップの終了に合わせて前記エア動作ステップを終了させる請求項1に記載のマッサージ機。
【請求項3】
前記第2の動作は、前記エアセルを収縮状態としている動作である請求項2に記載のマッサージ機。
【請求項4】
前記第2の動作は、前記エアセルを膨張状態としている動作である請求項2に記載のマッサージ機。
【請求項5】
前記第1の動作は、エアセルが膨縮を繰り返す動作であり、前記第2の動作は、前記第1の動作と同じ動作である請求項2に記載のマッサージ機。
【請求項6】
前記第1の動作は、エアセルが膨縮を繰り返す動作であり、前記第2の動作は、前記第1の動作と異なる膨縮動作である請求項2に記載のマッサージ機。
【請求項7】
前記第2制御部は、前記メカ動作ステップと並行する前記エア動作ステップにおいて、当該メカ動作ステップでの前記機械式マッサージ部の動作と関連付けられた動作を前記エア式マッサージ部に行わせ、
前記第2制御部は、前記メカ動作ステップから次のメカ動作ステップで行われる前記機械式マッサージ部の動作の変化に合わせて、次のエア動作ステップにおいて前記エア式マッサージ部の動作を変化させる請求項1〜6のいずれか一項に記載のマッサージ機。
【請求項1】
モータを動力として動作する施療子を有する機械式マッサージ部と、
エアの給排により膨縮動作するエアセルを有するエア式マッサージ部と、
前記機械式マッサージ部を動作させ複数のメカ動作ステップを実行する第1制御部と、
前記エア式マッサージ部を動作させ前記メカ動作ステップと並行するエア動作ステップを実行する第2制御部と、を備え、
前記第2制御部は、前記エア動作ステップを、これと並行する前記メカ動作ステップの終了に基づいて終了させることを特徴とするマッサージ機。
【請求項2】
前記エア動作ステップは、前記エア式マッサージ部に第1の動作を行わせる第1時間領域と、この第1時間領域の後に当該エア式マッサージ部に第2の動作を行わせる第2時間領域とからなり、
前記第2制御部は、前記第2時間領域の長さを変更することにより、前記メカ動作ステップの終了に合わせて前記エア動作ステップを終了させる請求項1に記載のマッサージ機。
【請求項3】
前記第2の動作は、前記エアセルを収縮状態としている動作である請求項2に記載のマッサージ機。
【請求項4】
前記第2の動作は、前記エアセルを膨張状態としている動作である請求項2に記載のマッサージ機。
【請求項5】
前記第1の動作は、エアセルが膨縮を繰り返す動作であり、前記第2の動作は、前記第1の動作と同じ動作である請求項2に記載のマッサージ機。
【請求項6】
前記第1の動作は、エアセルが膨縮を繰り返す動作であり、前記第2の動作は、前記第1の動作と異なる膨縮動作である請求項2に記載のマッサージ機。
【請求項7】
前記第2制御部は、前記メカ動作ステップと並行する前記エア動作ステップにおいて、当該メカ動作ステップでの前記機械式マッサージ部の動作と関連付けられた動作を前記エア式マッサージ部に行わせ、
前記第2制御部は、前記メカ動作ステップから次のメカ動作ステップで行われる前記機械式マッサージ部の動作の変化に合わせて、次のエア動作ステップにおいて前記エア式マッサージ部の動作を変化させる請求項1〜6のいずれか一項に記載のマッサージ機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−272041(P2008−272041A)
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願番号】特願2007−116467(P2007−116467)
【出願日】平成19年4月26日(2007.4.26)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願日】平成19年4月26日(2007.4.26)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]