
マッサージ機
【課題】被施療者の脚部に対してストレッチ運動を行うことができるマッサージ機を提供する。
【解決手段】被施療者が着座する座部と、被施療者が凭れる背凭れ部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、椅子本体内において、背凭れ部から座部を経由してフットレストまでの間を移動自在に設けられたマッサージ機構と、マッサージ機構の動作を制御する制御部と、を有している。マッサージ機構は、左右に対をなす内側施療子と、内側施療子と対をなして内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、駆動手段によって、内側施療子と外側施療子との間の左右方向の離隔距離を変更可能に構成されている。制御部は、施療子により被施療部を挟んだ状態で、マッサージ機構を前後方向又は身長方向へ移動させるよう制御する。
【解決手段】被施療者が着座する座部と、被施療者が凭れる背凭れ部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、椅子本体内において、背凭れ部から座部を経由してフットレストまでの間を移動自在に設けられたマッサージ機構と、マッサージ機構の動作を制御する制御部と、を有している。マッサージ機構は、左右に対をなす内側施療子と、内側施療子と対をなして内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、駆動手段によって、内側施療子と外側施療子との間の左右方向の離隔距離を変更可能に構成されている。制御部は、施療子により被施療部を挟んだ状態で、マッサージ機構を前後方向又は身長方向へ移動させるよう制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、椅子本体内又はフットレスト内を移動自在に構成されたマッサージ機構を利用して、被施療者の被施療部に対してストレッチ運動を行わせることを可能としたマッサージ機に関する。
【背景技術】
【0002】
従来、背凭れ部、座部、及びフットレストにかけて一体的に形成したロングガイドレールに沿ってマッサージ機構を移動可能とし、このマッサージ機構によって被施療者の上半身から下半身にかけてマッサージ可能とした椅子型マッサージ機が知られている(例えば、特許文献1)。
また、下肢の側部を両側から挟持する対の施療子を備え、この施療子を下肢に沿って移動させることができ、施療子の動作と下肢に沿った移動とを組み合わせて行う下肢用マッサージ装置が知られている(例えば、特許文献2)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−283266号公報
【特許文献2】特開2010−75428号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記特許文献1に開示された椅子型マッサージ機においては、マッサージ機構により被施療者の上半身から下半身をマッサージ可能であるが、マッサージ機構に設けられた施療子が左右一対のみで構成されているため、被施療者の上半身をマッサージする際は、上半身における左半身と右半身の夫々に対応した揉み等のマッサージを行うことができず、かつ施療範囲も狭く良好なマッサージ効果を得ることができない。また、被施療者の下半身をマッサージする際は、被施療者の左右の脚部を夫々挟むことができない。
一方、上記特許文献2に開示された下肢用マッサージ装置においては、対をなす施療子により左右の脚部を夫々挟んで下肢に沿って移動させることにより、施療子が動く軌跡を多様なものとすることができるが、施療対象は脚部のみであり施療範囲が狭い。
【0005】
そこで、本発明1は、上述した問題を解消するためになされたものであり、被施療者の上半身における左半身と右半身の夫々に対応した揉みマッサージ等が可能であり、且つ被施療者の左脚と右脚の夫々を挟むことが可能なマッサージ機構を利用して、被施療者の被施療部に対してストレッチ運動を行うことができるマッサージ機を提供することを目的とする。
また、本発明2及び本発明3は、十分な脚伸ばし効果を得ることができるマッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明1は、被施療者が着座する座部と、被施療者が凭れる背凭れ部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、前記椅子本体内において、前記背凭れ部から前記座部を経由して前記フットレストまでの間を移動自在に設けられたマッサージ機構と、前記マッサージ機構の動作を制御する制御部と、を有し、前記マッサージ機構は、左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、前記施療子により被施療部を挟んだ状態で、前記マッサージ機構を前後方向又は身長方向へ移動させるよう制御することを特徴とする。
このような構成とすることにより、マッサージ機構が背凭れ部に位置しているときには、上半身における左半身及び右半身の夫々に対して個別に摘むようにして揉みマッサージを行うことができると共に、マッサージ機構がフットレストに位置しているときには、脚部における左脚及び右脚の夫々に対して個別に挟むことができる。しかも、施療子が被施療部を挟んだ状態でマッサージ機構を前後方向又は身長方向へ移動させることにより、被施療部に対してストレッチ運動も行うことができる。
【0007】
また、前記マッサージ機構は、該マッサージ機構を被施療部に対して前後揺動させる進退ユニットを有し、前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御することが好ましい。
このような構成とすることにより、特にマッサージ機構を前方へ揺動させた場合には、脚部を挟持した施療子が、膝を略上方に持ち上げて膝の曲げ量を大きくした状態で脹脛を略下方へ引き下げるので、十分な脚伸ばし効果を得ることができる。
【0008】
また、前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を身長方向へ移動させるよう制御することが好ましい。
このような構成とすることにより、マッサージ機構を膝側から足先側へ向かって移動させた場合には、脚部を挟持した施療子が脹脛をその長手方向へ引き伸ばすので、脚伸ばし効果を得ることができる。一方、マッサージ機構を足先側から膝側へ向かって移動させた場合には、脚部を挟持した施療子が脹脛に対してその長手方向膝側へ移動するので、膝を曲げる脚部の屈曲運動を行わせることができる。
【0009】
また、前記マッサージ機構は、前記駆動手段によって、対をなす前記内側施療子間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、対をなす前記内側施療子により被施療者の首部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御することが好ましい。
このような構成とすることにより、首部を挟持した施療子が頭部を前傾又は後傾させるので、首筋伸ばし効果を得ることができる。
【0010】
また、前記制御部は、前記マッサージ機構を所定量進出させた状態で身長方向へ移動させ、前記マッサージ機構が首部に位置した際に、対をなす前記内側施療子により被施療者の首部を挟んだ状態で前記マッサージ機構を所定量後退させるよう制御することが好ましい。
このような構成とすることにより、首部がその長手方向へ引き伸ばされながら頭部が後傾されるので、より大きな首筋伸ばし効果を得ることができる。
【0011】
また、前記マッサージ機構は、前記内側施療子が上下で対をなして構成され、前記駆動手段によって、対をなす前記内側施療子間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、対をなす上側の前記内側施療子の離隔距離を下側のそれよりも小さく設定して前記マッサージ機構を前記背凭れ部において身長方向頭部側へ移動させ、対をなす下側の前記内側施療子の離隔距離を上側のそれよりも小さく設定して前記マッサージ機構を前記背凭れ部において身長方向腰部側へ移動させるよう制御することが好ましい。
このような構成とすることにより、左右対をなす内側施療子の離隔距離ついて、マッサージ機構の進行方向側を小さく設定しているので、十分な開胸ストレッチ効果を得ることができる。
【0012】
また、前記マッサージ機構は、左右の前記内側施療子及び前記外側施療子を夫々支持すると共に、前記駆動手段により軸芯回りに回転する第1支持シャフトを有し、該第1支持シャフトは、アームを介して前記内側施療子を支持する内側傾斜軸と、アームを介して前記外側施療子を支持する外側傾斜軸とを有し、前記内側傾斜軸及び前記外側傾斜軸は、前記軸芯に対して互いに異なる角度を有し、且つ対をなす前記内側傾斜軸は、前記軸芯に対して互いに異なる角度を有していることが好ましい。
このような構成とすることにより、マッサージ機構が背凭れ部に位置しているときには、対の内側施療子により背中の左右中心である背筋に対しても揉みマッサージを行うことができる。また、マッサージ機構が単一であっても、被施療者の上半身から下半身まで広範囲にマッサージを行うことができる。
【0013】
本発明2は、被施療者の脚部を支持するフットレストと、前記フットレストに脚部の長手方向に移動自在に設けられたマッサージ機構と、前記マッサージ機構の動作を制御する制御部と、を有し、前記マッサージ機構は、左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御することを特徴とする。
このような構成とすることにより、特にマッサージ機構を前方へ揺動させた場合には、脚部を挟持した施療子が、膝を略上方に持ち上げて膝の曲げ量を大きくした状態で脹脛を略下方へ引き下げるので、十分な脚伸ばし効果を得ることができる。
【0014】
本発明3は、少なくとも被施療者が着座する座部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、前記椅子本体内に設けられ、前記座部から前記フットレストまでの間を移動自在に構成されたマッサージ機構と、前記マッサージ機構の動作を制御する制御部と、を有し、前記マッサージ機構は、左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、対をなす前記内側施療子及び前記外側施療子の離隔距離を、両施療子が被施療者の脚部の背面に当接可能なる幅分に維持した状態で、前記マッサージ機構を前記座部から前記フットレストにかけて移動させるよう制御することを特徴とする。
このような構成とすることにより、膝を伸ばして大腿部背面の筋肉を伸長させるので、十分な脚伸ばし効果を得ることができる。
【発明の効果】
【0015】
本発明1によれば、被施療者の上半身における左半身と右半身の夫々に対応した揉みマッサージ等が可能であり、且つ被施療者の左脚と右脚の夫々を挟むことが可能なマッサージ機構を利用して、被施療者の被施療部に対してストレッチ運動を行うことができる。また、本発明2及び本発明3によれば、十分な脚伸ばし効果を得ることができる。
【図面の簡単な説明】
【0016】
【図1】前位置状態にあるマッサージ機の斜視図である。
【図2】身体支持部を分離した前位置状態にあるマッサージ機の斜視図である。
【図3】前位置状態にあるマッサージ機の側面図である。
【図4】後位置状態にあるマッサージ機の側面図である。
【図5】マッサージ機の構成を示すブロック図である。
【図6】マッサージ機構を前方斜め上方から見たときの外観斜視図である。
【図7】マッサージ機構を後方斜め上方から見たときの外観斜視図である。
【図8】マッサージ機構を上方から見たときの平面図である。
【図9】マッサージ機構の一部の構成について分解して示す分解斜視図である。
【図10】進退ユニット及び体圧センサを前方斜め上方から見たときの外観斜視図である。
【図11】進退ユニットを下方から見たときの底面図である。
【図12】体圧センサの構成について分解して示す分解斜視図である。
【図13】第1支持シャフトについて一部を分解して示す斜視図である。
【図14】第2支持シャフトについて一部を分解して示す斜視図である。
【図15】第1支持シャフト及び第2支持シャフトの一部を拡大して示す平面図であり、(a)は第1支持シャフトを、(b)は第2支持シャフトを夫々示している。
【図16】第1支持シャフトを回転させたときの内側施療子と外側施療子との動作を説明するための平面図であり、(a)は内側施療子と外側施療子とが互いに接近した状態、(b)は内側施療子と外側施療子とが互いに離反した状態を夫々示している。
【図17】脚部に対する施療子の動作説明図であり、(a)は椅子本体の足先側から見た模式図であり、(b)は椅子本体の左側から見た模式図である。
【図18】他の構成のマッサージ機構を前方斜め上方から見たときの外観斜視図であり、可動フレームが最も後退した状態を示している。
【図19】他の構成のマッサージ機構を前方斜め上方から見たときの外観斜視図であり、可動フレームが最も進出した状態を示している。
【図20】他の構成のマッサージ機構に係る進退ユニット及び体圧センサの構成について分解して示す分解斜視図である。
【図21】脚フレームと本体フレームの位置関係を示す平面模式図であり、(a)は椅子本体が前位置又は第1所定位置に位置している状態であり、(b)は椅子本体が後位置又は第1所定位置に位置している状態を夫々示している
【図22】幅センサの構成を示す模式図である。
【図23】各施療子の近接状態を説明する説明図であり、(a)は第1近接状態を、(b)は第2近接状態を、(c)は幅広状態を夫々示している。
【図24】ストレッチ動作(その1)の動作説明図であり、(a)はマッサージ機構が後退した状態、(b)はマッサージ機構が進出した状態を夫々示している。
【図25】ストレッチ動作(その2)の動作説明図であり、(a)はマッサージ機構が脹脛に位置した状態、(b)はマッサージ機構が足首に位置した状態を夫々示している。
【図26】ストレッチ動作(その3)の動作説明図であり、(a)はマッサージ機構が首部に位置した状態を背中側から見た模式図、(b)は(a)を側面から見た模式図でありマッサージ機構が後退した状態、(c)は(a)を側面から見た模式図でありマッサージ機構が進出した状態を夫々示している。
【図27】ストレッチ動作(その4)の動作説明図であり、(a)はマッサージ機構が肩部に位置した状態を背中側から見た模式図、(b)は(a)を側面から見た模式図、(c)はマッサージ機構が首部に位置した状態を背中側から見た模式図、(d)は(c)を側面から見た模式図である。
【図28】ストレッチ動作(その5)の動作説明図であり、(a)は第1近接状態のマッサージ機構が腰部に位置した状態を背中側から見た模式図、(b)は第2近接状態のマッサージ機構が首部に位置した状態を背中側から見た模式図である。
【図29】ストレッチ動作(その6)の動作説明図であり、(a)はマッサージ機構が臀部に位置した状態を足先側から見た模式図、(b)は(a)を側面から見た模式図、(c)はマッサージ機構が脚部に位置した状態を足先側から見た模式図、(d)は(c)を側面から見た模式図である。
【発明を実施するための形態】
【0017】
[全体構成]
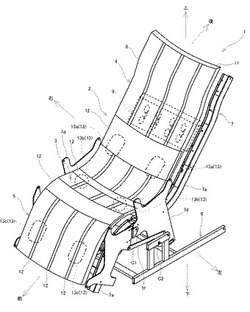
以下、本発明のマッサージ機1の全体構成について説明する。図1は前位置状態にあるマッサージ機1の斜視図であり、図2は身体支持部8を分離した前位置状態にあるマッサージ機1の斜視図であり、図3は前位置状態にあるマッサージ機1の側面図であり、図4は後位置状態にあるマッサージ機1の側面図である。なお、図2〜図4においては、視認性を考慮して後述するエアセル13を省略して図示している。
【0018】
図1〜図4に示すとおり、本発明のマッサージ機1は、主として、被施療者が着座する座部3と、座部3の後部に一体的に設けられた被施療者が凭れる背凭れ部4と、座部3の前部に上下揺動自在に設けられた被施療者の脚部を支持するフットレスト5と、で構成される椅子本体2と、この椅子本体2を前後に揺動自在に支持する脚フレーム6と、を有している。そして、この椅子本体2は、背凭れ部4から座部3を経由してフットレスト5までの間を移動自在に構成され、被施療者の被施療部をマッサージするマッサージ機構9と、座部3、背凭れ部4、及びフットレスト5の夫々に配設されたエアセル13を有している。このマッサージ機構9は、被施療者の身長方向に移動することにより、被施療者の首部から足先までをマッサージ可能である。なお、以下の説明で用いる方向の概念は、前位置状態におけるマッサージ機1の座部3に着座した被施療者から見たときの方向の概念と一致するものとし、その他の場合は適宜説明するものとする。
【0019】
[椅子本体の構成]
椅子本体2の構成について詳述すると、左右両端部に対のガイドレール7aを備えた本体フレーム7と、本体フレーム7に設けられ被施療者の身体を支持する身体支持部8と、を有している。このガイドレール7aは、被施療者の身長方向に沿って延設されており、マッサージ機構9の移動をガイドするよう構成されている。すなわち、対のガイドレール7a,7a間において、マッサージ機構9が移動するための開口部24が形成されている(図2参照)。そして、図3及び図4に示すように、背凭れ部4と座部3のガイドレール7aは、それぞれの境界部近傍に形成された湾曲部7bを介して連続して構成されており、フットレスト5と座部3のガイドレール7aは、それぞれの境界部近傍に設けられた回動軸C1を介して連結して構成されている。すなわち、フットレスト5のガイドレール7aは、座部3のガイドレール7aに対して回動軸C1回りに所定の範囲内で上下揺動自在である。そして、フットレスト5のガイドレール7aと座部3のガイドレール7aの境界部近傍にも湾曲部7cが形成されている。背凭れ部4のガイドレール7aと座部3のガイドレール7aの境界部近傍、及びフットレスト5のガイドレール7aと座部3のガイドレール7aの境界部近傍はそれぞれ湾曲部7b,7cを有しているため、マッサージ機構9は背凭れ部4から座部3を経由してフットレスト5までの間を円滑に移動することができる。なお、フットレスト5と座部3のガイドレール7aも背凭れ部4と座部3のガイドレール7aと同様に、湾曲部7cを介して連続して構成されていてもよい。
【0020】
本体フレーム7の構成について詳述すると、左右対のガイドレール(座部3のガイドレール)7a,7aと、脚フレーム6に回動軸C2を介してガイドレール7aを回動自在に支持する左右対の支持部材7dと、両支持部材7d,7dを連結する左右方向に延設された連結部材7eと、支持部材7dとフットレスト5のガイドレール7aを連結し、本体フレーム7の前後揺動に連動してフットレスト5のみを座部3に対して上下揺動させるリンク部材7fと、ガイドレール7aに対して身体の厚み方向に所定距離Dを存して身体支持部8を支持する支持部材7g(図2、図3、及び図4参照。図2においては視認性を考慮して二点鎖線で示している。)と、により構成されている。また、本体フレーム7と脚フレーム6の間には、本体フレーム7を脚フレーム6に対して回動軸C2回りに前後揺動させる揺動駆動部10が介在している。揺動駆動部10はモータ10a駆動によりロッド10bが伸縮するアクチュエータにより構成されており、このロッド10bの前端部が脚フレーム6に取り付けられ、後端部が本体フレーム7の連結部材7eに取り付けられている。
【0021】
このロッド10bが伸長すると、図4に示す後位置状態から、椅子本体2が全体として脚フレーム6に対して回動軸C2回りに前方へ揺動するとともに、フットレスト5が座部3に対して回動軸C1回りに下方へ揺動して、図3に示す前位置状態となる。一方、このロッド10bが収縮すると、図3に示す前位置状態から、椅子本体2が全体として脚フレーム6に対して回動軸C2回りに後方へ揺動するとともに、フットレスト5が座部3に対して回動軸C1回りに上方へ揺動して、図4に示す後位置状態となる。なお、ロッド10bの伸長量を制御することにより、椅子本体2を前位置状態から後位置状態までの間の任意の前後位置で停止させることができる。また、ロッド10bの伸縮を繰り返し行うことにより、椅子本体2をいわゆるロッキング動作させることができる。
【0022】
図3及び図4に示すとおり、座部3は、前方へ向かうにつれて前上がり傾斜状に構成されており、フットレスト5は前方(足先側)へ向かうにつれて前下がり傾斜状に構成されている。すなわち、座部3とフットレスト5の境界部近傍は上に凸の湾曲部7cが形成されている。したがって、被施療者はマッサージ機1に着座する際、膝の背面をこの湾曲部7c付近(身体支持部8の後述する湾曲部8c)に容易に位置決めすることができる。
【0023】
図2に示すとおり、身体支持部8は、所定の張力をもって本体フレーム7に張設され可撓性を有する布地等よりなるカバー本体11、及びこのカバー本体11と同様に張設されたベルト部材12により構成され、被施療者の上半身から下半身までを支持するよう構成されている。また、図3及び図4に示すとおり、身体支持部8は、ガイドレール7aに対して身体の厚み方向に所定距離Dを存して本体フレーム7(支持部材7g)に張設されている。被施療者は、この身体支持部8を介してマッサージ機構9によりマッサージを受けることとなる。このベルト部材12は、第1ベルト部材12a、第2ベルト部材12b、及び第3ベルト部材12cを有しており、第1ベルト部材12aは、カバー本体11に縫い込まれて一体的に形成され、身長方向に沿って背凭れ部4からフットレスト5にかけて張設されており、第2ベルト部材12bは、カバー本体11の前方(被施療者側)に位置してカバー本体11とは別体として設けられ、左右方向に沿って背凭れ部4における腰位置及び座部3に張設されており、第3ベルト部材12cは、カバー本体11に縫い込まれて一体的に形成され、座部3とフットレスト5の境界部近傍(湾曲部7c)に張設されている。そして、カバー本体11及び各ベルト部材12a〜12cの撓み度合いは、カバー本体11>第1ベルト部材12a>第2ベルト部材12b>第3ベルト部材12cとなるよう設定されている。
【0024】
この身体支持部8において、ベルト部材12が張設されている第1支持部分は、ベルト部材12が張設されていない第2支持部分(カバー本体11のみで構成されている箇所)に比べて撓み度合いが小さく、被施療者がマッサージ機1に着座したとき、下方(マッサージ機構9が有する施療子60及びアーム68,69が動作する動作領域S)への落ち込みが少なくなるようになっている。この移動領域Sを具体的に説明すると、施療子60及びアーム68,69の左右方向における動作可能範囲、身体の厚み方向における動作可能範囲、及び身長方向における動作可能範囲で囲まれる三次元的な空間である(図17も参照)。また、マッサージ機構9が有する施療子60は、左右方向においては第2支持部分に位置している。具体的には、対を成す内側施療子61a,62aは、前方から見て左右中央の第1ベルト部材12aと左右外側の第1ベルト部材12aの間に夫々位置しており、対を成す外側施療子61b,62bは、前方から見て左右外側のベルト部材12aの左右外側に夫々位置している。なお、第1ベルト部材12aは、左右中央1本のみで構成してもよい。
【0025】
身体支持部8を前述した構成とすることにより、被施療者の身体を第1支持部分において安定して支持することができると共に、第2支持部分においては被施療者の身体が動作領域Sに十分落ち込むのでマッサージ機構9による十分なマッサージを受けることができる。特に、身体支持部8における座部3とフットレスト5の境界部近傍に形成された湾曲部8cにおいて、その撓み度合いが他の箇所よりも小さく設定されている(第3ベルト部材12cを有する第1支持部分で構成されている)ため、膝の動作領域Sへの落ち込み量を少なくして、膝の側部を避けてマッサージすることができる。なお、膝の側部へのマッサージは痛みを伴うため好ましくない。この身体支持部8は、座部3とフットレスト5の境界部近傍の湾曲部8cに設けられた第3ベルト部材12cに代えて、剛性を有するブロー成形等よりなる硬質部材(例えば合成樹脂等)としてもよい。また、第2支持部材12bは、カバー本体11の前方(被施療者側)に位置してカバー本体11とは別体として構成され、且つカバー本体11及び第1ベルト部材12aよりも撓み度合いが小さく設定されているため、腰及び臀部をカバー本体11よりも前方(被施療者側)で安定して支持することができると共に、身体支持部8の後方に設けられたマッサージ機構9が動作(身長方向への移動、揉み動作、叩き動作等)することによって、施療子60が第2ベルト部材12bに引っ掛かってしまうことを防止できる。更に、椅子本体2が前位置状態にあるときは、被施療者の体重は座部3に最も作用し、椅子本体2が後位置状態にあるときは、被施療者の体重は背凭れ部4(特に腰位置)に最も作用するが、いずれの状態においても第2ベルト部材12bによって身体を安定して支持することができる。
【0026】
図1に示すとおり、椅子本体2の各所(本実施形態では、背凭れ部4、座部3、及びフットレスト5)には、エアの給排気により膨張収縮して、対応する被施療部をマッサージする左右で対を成すエアセル13が設けられている。背凭れ部4に設けられたエアセル13aは被施療者の背中を後方から押圧し、座部3に設けられたエアセル13bは下方から膨張し被施療者の臀部及び大腿部を略左右方向から挟むように押圧し、フットレスト5に設けられたエアセル13cは後方から膨張し被施療者の脚部を略前方から押圧するよう構成されている。なお、本実施の形態では、エアセル13は身体支持部8に設けられているが、本体フレーム7(支持部7g)に設けられていてもよい。
【0027】
図5は、マッサージ機1の構成を示すブロック図である。図5に示すように、上述した各エアセル13a〜13cは、可撓性中空のエアチューブを介してポンプ及びバルブ等から成る給排気装置51に接続されている。この給排気装置51は座部3の下方に収容されており、同じく座部3の下方に収容された制御部50からの指示に従って駆動し、各エアセル13a〜13cへの給排気を互いに独立して行うことができるようになっている。そして、制御部50からの指示により給排気装置51が駆動し、エアセル13a〜13cが膨縮することにより、被施療者の全身のいたるところを押圧施療可能である。
【0028】
また、給排気装置51は制御部50からの指示に従って予め設定されたプログラムにより動作する他、制御部50に接続されたリモートコントローラ55を被施療者が操作することにより制御部50へ入力された信号に基づいても動作することができる。なお、以下に説明するマッサージ機構9、揺動駆動部10の動作についても同様に、制御部50からの指示に従って予め設定されたプログラムにより動作する他、リモートコントローラ55を被施療者が操作することにより制御部50へ入力された信号に基づいても動作することができる。
【0029】
また、制御部50はメモリ(図示せず)を有しており、このメモリには予め定められたコースに従ってマッサージ機構9やエアセル13a〜13cによって被施療部に対してマッサージを行う複数のマッサージプログラムが格納されている。そして、リモートコントローラ55は、電源釦55a、各マッサージプログラムに対応する複数のコース釦55b〜55eを有しており、コース釦55b〜55eを操作することにより対応するマッサージプログラムが実行されるようになっている。
【0030】
[マッサージ機構の構成]
以下、椅子本体2に設けられたマッサージ機構9の構成について説明する。図6は、マッサージ機構9を前方斜め上方から見たときの外観斜視図であり、図7は、後方斜め上方から見たときの外観斜視図であり、図8は、上方から見たときの平面図である。図9は、マッサージ機構9の一部の構成について分解して示す分解斜視図である。図10は、進退ユニット29及び体圧センサ30を前方斜め上方から見たときの外観斜視図であり、図11は、進退ユニット29を下方から見たときの底面図である。図12は、体圧センサ30の構成について分解して示す分解斜視図である。なお、図6〜図8においては、後述する可動フレーム28が最も後退した状態を図示しており、図10及び図11においては、後述する可動ユニット34が最も後退した状態を図示している。なお、以下、マッサージ機構9の説明で用いる方向の概念は、座部3に着座した被施療者から見て、幅方向を左右方向とし左手側が「左」、右手側が「右」とし、身長方向を上下方向とし頭側が「上」、腰側が「下」とし、身体の厚み方向を前後方向とし被施療部に近づく方向が「前」、被施療部から遠ざかる方向が「後」として規定し、その他の場合は適宜説明するものとする。
【0031】
マッサージ機構9は、上下左右に配された12個の施療子60を有しており(図2も参照)、詳しくは後述するが、この施療子60は駆動手段を成すモータ(揉みモータ80,叩きモータ81)の駆動によって三次元的に動作し、被施療者の上半身から下半身にかけてその背面又は側面に対して揉み、叩き、及び指圧などの様々の押圧施療を施すことが可能になっている。また、マッサージ機構9は、左右で対をなす背面施療子25を有しており、前述したモータ(具体的には叩きモータ81)の駆動によって軸芯回りに回転動作し、被施療者の上半身から下半身にかけてその背面に対してさすり施療を施すことが可能となっている。また、このような施療子60を有するマッサージ機構9は、ガイドレール7aが有するラック(図示せず)にマッサージ機構9が有するピニオン26が係合しており、昇降モータ14の駆動によりピニオン26が回転すると、椅子本体2内を身長方向へ移動可能になっている。したがって、マッサージ機構9を移動させることにより、被施療者の上半身から下半身にかけてその背面に対し、首部から脚部に至るまでローリングマッサージを施すことができる。また、マッサージ機構9は、マッサージ機構9を被施療者に対して前後方向に進退させる進退駆動部15を構成する進退モータ15cを有している。これら各モータ14,15c,80,81は、制御部50(図5参照)からの信号により出力軸の回転方向及び回転速度が制御される。更に、この制御部50は、昇降モータ14及び進退モータ15cの回転数をロータリエンコーダ等によりパルス化して、そのパルス数を検出することにより、マッサージ機構9の身長方向における位置(上下位置)、及び被施療者に対する突出量(前後位置)を把握できるよう構成されている。
【0032】
図6〜図8に示すとおり、マッサージ機構9は、ベースフレーム27と、ベースフレーム27に揺動自在に設けられた可動フレーム28と、可動フレーム28をベースフレーム27に対して前後方向に進退させる進退ユニット29と、進退ユニット29に設けられた被施療者の体圧を検出する体圧センサ30と、を有している。以下、各部材について詳述する。
【0033】
[ベースフレームの構成]
ベースフレーム27は、板状に形成された板面が左右方向を向く左右の側部フレーム27aと、両側部フレーム27a,27aの後部に位置し両側部フレーム27a,27aを連結する後部フレーム27bと、により構成されており、ベースフレーム27(側部フレーム27a)の下部には、昇降モータ14に連動連結された左右方向に延びる昇降シャフト31が回転可能に設けられている。昇降シャフト31の左右両端部には、ピニオン26及びガイドローラ32が設けられており、昇降モータ14を駆動させると、ピニオン26が昇降シャフト31と一体回転してベースフレーム27が身長方向に昇降する。なお、両側部フレーム27aの上部にもガイドローラ32が設けられている。
【0034】
[可動フレームの構成]
可動フレーム28は、板状に形成された板面が左右方向を向く左右の側部フレーム28aと、両側部フレーム28a,28aの後部に位置し両側部フレーム28a,28aを連結する後部フレーム28bと、左右方向略中央に位置し後述する進退ユニット29を連結する連結フレーム28cと、により構成されている。また、可動フレーム28(側部フレーム28b及び連結フレーム28c)は、昇降シャフト31に対して枢支されており、昇降シャフト31を支点にその上部が前後方向に揺動自在に構成されている。そして、前述した施療子60及び背面施療子25は可動フレーム28に設けられている。
【0035】
[進退ユニットの構成]
図10及び図11に示すとおり、進退ユニット29は、ベースフレーム27である後部フレーム27bに取り付けられたベースユニット33と、可動フレーム28である連結フレーム28cに取り付けられた可動ユニット34と、可動ユニット34をベースユニット33に対して直線的に進退させる進退駆動部15と、により構成されており、全体としてベースフレーム27に対して前後方向に揺動自在に取り付けられている。ベースユニット33は、その後部がブラケット27cを介して後部フレーム27bに枢支されており、その前部が軸芯C3回りに揺動自在に構成されている。また、ベースユニット33は、可動ユニット34の進退方向に沿って開口するスリット33aが設けられている。
【0036】
進退駆動部15は、ベースユニット33に取り付けられた前後方向に延びるネジ軸15aと、ネジ軸15aと螺合しネジ推力によって前後方向に直線的に移動するナット15bと、ネジ軸15aを回転させる進退モータ15cと、により構成されている。この進退モータ15cは、制御部50(図5参照)からの信号により出力軸の回転方向及び回転速度が制御され、可動ユニット34の移動方向を切り替えたり、可動ユニット34の位置決めを行ったりすることができる。また、制御部50は、昇降モータ14を駆動させてマッサージ機構9を身長方向に移動させる際、可動ユニット34を後退させるよう進退モータ15cを制御するよう構成されており、マッサージ機構9の移動をスムーズに行うことができる。
【0037】
可動ユニット34は、可動フレーム28である連結フレーム28cに取り付けられた第1部材35と、第1部材35を移動自在に支持すると共にナット15bにナットブラケット36aを介して連結された第2部材36と、第1部材35と第2部材36の間に設けられ第1部材35を前方(被施療部側)へ付勢する付勢部材としてのコイルバネ37と、により構成されている。より具体的には、第1部材35は、第1部材35を連結フレーム28cに接続するジョイントブラケット35aと、ジョイントブラケット35aの後部に取り付けられた左右で対をなすガイドピン35bと、ガイドピン35bに取り付けられると共にコイルバネ37に挿通されたバネピン35cと、バネピン35cの後端部に設けられ後述する被検出体38を支持する被検出体ブラケット35dと、により構成されている。
【0038】
第2部材36は、第2部材36をナット15bに接続するナットブラケット36aと、コイルバネ37の後端部が当接するバネ受け36bと、ナットブラケット36a及びバネ受け36bの上部に取り付けられ後述する検出体39を支持する検出体ブラケット36dと、により構成されている。ナットブラケット36aには前後方向に沿って開口する長穴36cが形成されており、この長孔36cに第1部材35が有するガイドピン35bが挿通されて、ガイドピン35b(第1部材35)が長穴36cの範囲内でナットブラケット36a(第2部材36)に対して移動可能である。コイルバネ37は、その前端部がバネピン35cの前部に形成された当接部35eに当接し、その後端部がバネ受け36bに当接しており、バネピン35cを介して第1部材35を前方(被施療部側)へ常時付勢するよう構成されている。
【0039】
このように進退ユニット29が全体としてベースフレーム27に対して揺動自在に設けられているため、可動ユニット34が直線的に前後移動しても、進退ユニット29と昇降シャフト31との距離を一定に保つことができ、進退ユニット29は、可動フレーム28をベースフレーム27に対して揺動させることが可能となる。従って、進退駆動部15として直線的な運動を生じさせる構成を採用しているので、進退駆動部15の構成を簡素化することができると共に、マッサージ機構9を揺動させて施療子60により被施療者の肩を上方からマッサージすることが可能となる。
【0040】
[体圧センサの構成]
図10〜図12に示すとおり、体圧センサ30は、第1部材35が有する被検出体ブラケット35dに設けられ第1部材35と共に移動する被検出体38と、第2部材36が有する検出体ブラケット36dに設けられ被検出体38の位置を検出する検出体39と、により構成されている。この体圧センサ30の構成を具体的に説明する。体圧センサ30は、ベースユニット33の下方に位置する可動ユニット34に設けられており、ベースユニット33に設けられたスリット33aから上方に突出して、スリット33aの範囲内で進退駆動部15の駆動による前後移動が可能に構成されている。そして、この検出体39は、発光部39aと、この発光部39aに対して上下方向に所定間隔を有して対向配置された受光部39bとを有しており、被検出体38は、発光部39aと受光部39bの間を前後にスライド移動自在であり、発光部39aからの光を透過させる複数の孔部38a〜38dを有した遮蔽板により構成されている。そして、発光部39aは複数の発光素子(図示せず)を有しており、受光部39bは前記発光素子と同数の受光素子(図示せず)を有している。このように構成された検出体39は、受光部39aが検出する孔部38a〜38dより透過する透過光の個数により、被検出体38の前後位置を検出するよう構成されている。本実施形態では、孔部38a〜38dは複数個(より具体的には4個)設けられており、被検出体38の前後位置を複数段階(より具体的には6段階)に検出可能である。
【0041】
制御部50は、体圧センサ30により検出した第1部材35の前後位置に応じて、進退モータ15cを駆動制御して、可動ユニット34の進退量を調整するよう構成されている。具体的には、被施療者の体圧により、コイルバネ37の付勢力に抗して第1部材35が第2部材36に対して後退して所定の前後位置となったことを体圧センサ30が検出すると、進退モータ15cを駆動制御して、可動ユニット34を所定量後退させるよう構成されている。この場合、第1部材35の前後におけるニュートラル位置を制御部50が有するメモリに記憶させておき、常時ニュートラル位置となるよう進退モータ15cを駆動制御する。あるいは、制御部50は、第1部材35が常時所定の前後位置(ニュートラル位置)となるよう進退モータ15cを駆動制御して、可動ユニット34の進退量を調整するよう構成されていてもよい。
【0042】
図6〜図9に示すように、マッサージ機構9は被施療者の上半身の左側(以下、「左半身」という)又は左脚に対応して、内側施療子61a及び外側施療子61bから成る左側施療子61と、上半身の右側(以下、「右半身」という)又は右脚に対応して、内側施療子62a及び外側施療子62bから成る右側施療子62とを備えている。このうち内側施療子61aは、上側の施療子60a,60eと下側の施療子60b,60fとを有し、これらの施療子60a,60bは略V字状のアーム68の上下の先端内側にて枢支されており、これらの施療子60e,60fは略V字状のアーム68の上下の先端外側にて固着されている。同様に、外側施療子61bは、上側の施療子60c,60gと下側の施療子60d,60hとを有し、これらの施療子60c,60dは略V字状を成すアーム69の上下の先端外側にて枢支されており、これらの施療子60g,60hは略V字状を成すアーム69の上下の先端内側にて固着されている。なお、右半身に対応する内側施療子62a及び外側施療子62bについては、左半身に対応する上記内側施療子61a及び外側施療子61bの各構成と同様になっているのでここでの説明は省略し、図面においては、対応する構成に同一の符号を付しておく。
【0043】
内側施療子61a及び外側施療子61bについて更に詳述すると、内側施療子61aは、アーム68の内側に設けられた第1内側施療子60a,60bと、アーム68の外側に設けられた第2内側施療子60e,60fよりなり、外側施療子61bは、アーム69の内側に設けられた第1外側施療子60g,60hと、アーム69の外側に設けられた第2外側施療子60c,60dよりなる。第1内側施療子60a,60bは、第2内側施療子60e,60fに比べて大寸法に構成され、特に、厚み寸法が大きくなるように構成されている。一方、第1外側施療子60g,60hは、第2外側施療子60c,60dに比べて小寸法に構成され、特に、厚み寸法が小さくなるように構成されている。
【0044】
図9に示すとおり、アーム68,69は、夫々の基部が、略V字状を成すコンロッド70,71が夫々有する一方の先端にて、左右方向に沿った枢軸回りを所定の角度範囲で回動可能なように支持されている。また、アーム68,69には左右方向の外側へ突出したピンp1が設けられ、コンロッド70,71にも左右方向の外側へ突出したピンp2が設けられている。そして、ピンp1,p2間には、所定のバネ係数を有するコイルバネsが掛けられている。従って、アーム68,69は、コイルバネsによって上側の施療子60a,60c,60e,60gが前方(被施療者側)へ向かうように付勢されている。なお、コイルバネsとして適宜バネ係数を変えて採用することにより、施療子60a,60c,60e,60gによる被施療者への付勢力を調整することができる。また、アーム68,69は、コイルバネsによって上側の施療子60a,60c,60e,60gと下側の施療子60b,60d,60f,60hの前方(被施療者側)への突出量が略均等である中立状態となるよう付勢されていてもよい。アーム68,69が中立状態となるようコイルバネsの位置及び付勢力を設定すれば、マッサージ機構9が肩付近に位置する際には主に上側の施療子が60a,60cが肩の略上方から当接することができ、膝付近(湾曲部7c付近)を通過する際には施療子60a〜60hが膝の背面に引っ掛かってしまうことを防止できる。
【0045】
各コンロッド70,71の基部には略左右方向に貫通するよう軸受孔70a,71aが形成されており、これらの軸受孔70a,71aには、左右方向へ軸芯を沿うように配設された第1支持シャフト72が挿通されている。また、各コンロッド70,71が夫々有する他方の先端には図示しない嵌合凹部が形成され、この嵌合凹部には連結棒73,74の各一端部が夫々挿入されており、嵌合凹部と連結棒73,74の一端部とはボールジョイント等の自在継手を形成している。連結棒73,74の各他端部は、略左右方向に貫通する軸受孔75a,76aを有する軸受部材75,76の夫々に接続され、これら軸受部材75,76が有する軸受孔75a,76aには、左右方向へ軸芯を沿うように配設された第2支持シャフト77が挿通されている。
【0046】
図8に示すように、マッサージ機構9にはギヤボックス78が備えられている。このギヤボックス78は、左右方向において左半身(左脚)用の内側施療子61aと右半身(右脚)用の内側施療子62aとの間に位置し、左右方向へ延びる第1支持シャフト72及び第2支持シャフト77の中央部分が夫々貫通している。ギヤボックス78の近傍には、昇降モータ14、進退モータ15c、揉みモータ80、及び叩きモータ81が配設されており、これら各モータは、制御部50(図5参照)からの信号により出力軸の回転方向及び回転速度が制御される。そして、このギヤボックス78は、前述した進退ユニット29を連結する連結フレーム28cを構成している。
【0047】
そして、揉みモータ80の回転出力は、ギヤボックス78内に備えられたウォーム(図示せず)と、第1支持シャフト72の左右方向の中央部に設けられて前記ウォームに噛合するヘリカルギヤ(図22参照)とを介し、第1支持シャフト72に伝達されるようになっている。従って、制御部50からの指示により揉みモータ80が駆動すると、第1支持シャフト72が軸芯72a(図7参照)回りに回転する。また、叩きモータ81の回転出力は、ギヤボックス78に備えられたプーリ及びベルト(図示せず)と、第2支持シャフト77の左右方向の中央部に設けられたプーリとを介し、第2支持シャフト77に伝達されるようになっている。従って、制御部50からの指示により叩きモータ81が駆動すると、第2支持シャフト77が軸芯77a(図7参照)回りに回転する。
【0048】
図13は、第1支持シャフト72について一部を分解して示す斜視図であり、図14は、第2支持シャフト77について一部を分解して示す斜視図である。また、図15は、第1支持シャフト72及び第2支持シャフト77の一部を拡大して示す平面図であり、(a)は第1支持シャフト72を、(b)は第2支持シャフト77を夫々示している。
【0049】
図13に示すように、第1支持シャフト72は、複数の部品が組み合わされて左右対称に構成されており、左右方向へ長寸の主軸83を備えている。この主軸83には、内側傾斜軸部材84及び外側傾斜軸部材85が挿通されており、これら傾斜軸部材84,85は、主軸83の長手方向における所定箇所に位置している。
【0050】
より詳しくは、主軸83において、左右方向中心側に近い部分には内側傾斜軸部材84が外嵌している。この内側傾斜軸部材84は、大径円柱状を成して内側のコンロッド70の嵌合孔70a(図9参照)が外嵌する傾斜軸部84aと、傾斜軸部84aの左右内側方から張り出した小径円柱状の取付部84bとを有し、傾斜軸部84a及び取付部84bを貫通して貫通孔84cが形成されている。図15(a)に示すように、傾斜軸部84aとツバ部84bとは互いの軸芯84dが略一致しており、貫通孔84cはこの軸芯84dに対して所定の角度A1(>0)だけ傾斜して設けられている。従って、内側傾斜軸部材84の貫通孔84cに主軸83が挿通されると、傾斜軸部84a及び取付部84bは、主軸83の軸芯72aに対して軸芯84dが角度A1だけ傾斜することとなる。
【0051】
また、内側傾斜軸部材84に対して左右方向の外方には、外側傾斜軸部材85が配設されている。この外側傾斜軸部材85は、上述した内側傾斜軸部材84と同様の構成を有しており、大径円柱状を成して外側のコンロッド71の嵌合孔71a(図9参照)が外嵌する傾斜軸部85aと、小径円柱状の取付部85bとを備え、これら傾斜軸部85a及び取付部85bを貫通して貫通孔85cが形成されている。図15(a)に示すように、傾斜軸部85aと取付部85bとは互いの軸芯85dが略一致しており、貫通孔85cはこの軸芯85dに対して所定の角度A2(>0)だけ傾斜して設けられている。従って、外側傾斜軸部材85の貫通孔85cに主軸83が挿通されると、傾斜軸部85a及び取付部85bは、主軸83の軸芯72aに対して軸芯85dが角度A2だけ傾斜することとなる。
【0052】
このようにして主軸83に挿通された内側傾斜軸部材84及び外側傾斜軸部材85は、夫々の取付部84b,85bに径方向へ貫通形成された孔84e,85eへ係止ピン88が圧入され、係止ピン88の先端が主軸83に貫通形成された孔83aに挿通されることにより、主軸83に対して固定される。
【0053】
ところで、図15(a)に示すように、内側傾斜軸部材84の軸芯84dと外側傾斜軸部材85の軸芯85dとは、互いに平行ではなく、第1支持シャフト72の軸芯72aに対して異なる角度を有して傾斜している。特に本実施の形態では、内側傾斜軸部材84と外側傾斜軸部材85とは、平面視したときに軸芯72aに対して互いに逆向きに傾斜して設けられており、また、内側傾斜軸部材84の軸芯84dと軸芯72aとの成す鋭角A1は、外側傾斜軸部材85の軸芯85dと軸芯72aとの成す鋭角A2に比べて若干大きく(A1>A2)設定されている。また、左右の内側傾斜軸部材84,84の軸芯84d,84dは、互いに平行ではなく、第1支持シャフト72の軸芯72aに対して異なる角度を有して傾斜し、左右の外側傾斜軸部材85,85の軸芯85d,85dは、互いに平行ではなく、第1支持シャフト72の軸芯72aに対して異なる角度を有して傾斜している。特に本実施の形態では、左右の内側傾斜軸部材84,84は、平面視したときに軸芯72aに対して互いに逆向きに傾斜して設けられており、左右の外側傾斜軸部材85,85は、平面視したときに軸芯72aに対して互いに逆向きに傾斜して設けられている(図9も合わせて参照)。
【0054】
図16は、第1支持シャフト72を回転させたときの内側施療子61a,62aと外側施療子61b,62bとの動作を説明するための平面図であり、(a)は内側施療子61a,62aと外側施療子61b,62bとが互いに接近した状態、(b)は内側施療子61a,62aと外側施療子61b,62bとが互いに離反した状態を夫々示している。図16(a),(b)に示すように、上述したような第1支持シャフト72が、揉みモータ80の駆動により軸芯72a回りに回動すると、コンロッド70及びアーム68を介して傾斜軸部84aに支持された内側施療子61a,62aと、コンロッド71及びアーム69を介して傾斜軸部85aに支持された外側施療子61b,62bとは、互いの左右方向の離隔距離が変更される。なお、図8中に示す符号Pは、マッサージ機構9が背凭れ部4に位置するときの各施療子60において被施療者の背中に接触する主な箇所を示している。
【0055】
また、揉みモータ80を適宜停止させることにより、図16(a)に示す接近状態と、図16(b)に示す離反状態との間で、内側施療子61a,62aと外側施療子61b,62bとを任意の離隔寸法で維持することが可能である。更に、マッサージ機構9を背凭れ部4に位置させて揉みモータ80を連続的に駆動することにより、内側施療子61a,62aと外側施療子61b,62bとを繰り返し接近及び離反させ、背凭れ部4に支持された左半身と右半身とを、独立して揉みマッサージすることができる。即ち、内側施療子61a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)及び外側施療子61b(第2外側施療子60c,60d)により、左半身を独立して左右から摘むように揉みマッサージすることができ、内側施療子62a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)及び外側施療子62b(第2外側施療子60c,60d)により、右半身を独立して左右から摘むように揉みマッサージすることができる。加えて、左右の内側施療子61a,62a(第1内側施療子60a,60b)に注目すると、第1支持シャフト72の回転により、互いに接近及び離反するため、被施療者の背骨を跨いで左右から摘むように揉みマッサージすることができる。更には、対の外側施療子61b,62b(第2外側施療子60c,60d)により、上半身の側面(例えば脇等)に対しても揉みマッサージすることができる。
【0056】
また、昇降モータ14を駆動してマッサージ機構9を座部3まで移動させて、揉みモータ80を連続的に駆動させれば、臀部や大腿部における左部分と右部分とを、上半身と同様に、独立して左右から摘むように揉みマッサージすることができる。また、昇降モータ14を駆動してマッサージ機構9をフットレスト5まで移動させて、揉みモータ80を連続的に駆動させれば、対を成す内側施療子61a及び外側施療子61bにより、左脚を独立して左右から挟むように揉みマッサージすることができ、対を成す内側施療子62a及び外側施療子62bにより、右脚を独立して左右から挟むように揉みマッサージすることができる。
【0057】
図17は、脚部に対する施療子60の動作説明図であり、(a)は椅子本体2の足先側から見た模式図であり、(b)は椅子本体2の左側から見た模式図である。
図17に示すように、被施療者の膝は、身体支持部8における撓み度合いの小さい座部3とフットレスト5の境界部近傍の湾曲部8c(第1支持部分)において支持されるため、二点鎖線で図示したマッサージ機構9の移動領域Sへの落ち込みが小さく、内側施療子61a,62a(第2内側施療子60e,60f)及び外側施療子61b,62b(第1外側施療子60g,60h)によって膝の背面を揉みマッサージすることができ、膝を除く脚部(ふくらはぎ等)は、身体支持部8における撓み度合いの大きい部分(第2支持部分)において支持されるため、一点鎖線で図示したマッサージ機構9の移動領域Sへ十分落ち込み、対を成す内側施療子61a(第2内側施療子60e,60f)及び外側施療子61b(第1外側施療子60g,60h)により、左ふくらはぎを独立して左右から挟むように揉みマッサージすることができ、対を成す内側施療子62a(第2内側施療子60e,60f)及び外側施療子62b(第1外側施療子60g,60h)により、右ふくらはぎを独立して左右から挟むように揉みマッサージすることができる。
【0058】
なお、本実施の形態では、既に説明したように図15(a)に示す角度A1,A2がA1>A2という関係に設定されており、第1支持シャフト72が回転したときの左右方向の動作範囲は、内側施療子61a,62aの方が外側施療子61b,62bよりも大きくなっている。これにより、外側施療子61b,62bが左右の外方へ移動したときに、椅子本体2内の本体フレーム7と干渉するのを防止しつつ、内側施療子61a,62aと外側施療子61b,62bとの相対距離の変更可能範囲を大きく確保している。また、内側施療子61a,62aの動作範囲を決定する角度A1は、コンロッド70とギヤボックス78との干渉を防止すること、及び外側施療子61b,62bとの接近時の距離などを考慮して決定される。また、上記のように設定された角度A1,A2は一例であり、周辺の構成や他の事情に応じて異なる関係の角度に設定することも可能であって、A1=A2に設定することもできる。
【0059】
一方、図14に示すように、第2支持シャフト77は、複数の部品が組み合わされて左右対称に構成されており、左右方向へ長寸の主軸90を備えている。この主軸90は、左右方向に軸芯が向けられた円柱部90aを有し、該円柱部90aの左右の端部からはシャフト部90bが左右の外方へ延設されている。シャフト部90bは断面が略矩形状を成し、周方向に存在する4つの角部分が面取りされている。また、左右の各シャフト部90bには、内側偏芯軸部材91及び外側偏芯軸部材92とエンド部材93とが挿通されており、これら偏芯軸部材91,92及びエンド部材93は、互いの間にスペーサ94が介在することによりシャフト部90bの長手方向における所定箇所に位置している。
【0060】
より詳しくは、シャフト部90bにおいて、円柱部90aに最も近い部分には内側偏芯軸部材91が外嵌している。この内側偏芯部材91は、小径円柱状を成して内側施療子61a,62aに対応して設けられた軸受部材75の軸受孔75a(図9参照)が外嵌する偏芯軸部91aと、該偏芯軸部91aの左右方向の内方端から拡径方向へ張り出した大径円柱状のツバ部91bとを有し、偏芯軸部91a及びツバ部91bを左右方向へ貫通する貫通孔91cが形成されている。ここで、貫通孔91cの軸芯は、偏芯軸部91aの軸芯91dから所定寸法だけ偏芯している。従って、図15(b)に示すように、内側偏芯軸部材91の貫通孔91cにシャフト部90bが挿通されると、偏芯軸部91aの軸芯91dは、第2支持シャフト77の軸芯77aに対して所定寸法D1だけ偏芯して位置することとなる。
【0061】
また、内側偏芯軸部材91に対して左右方向の外方には、スペーサ94を挟んで外側偏芯軸部材92が配設されている。この外側偏芯軸部材92は、上述した内側偏芯軸部材91と同様の構成を有しており、小径円柱状を成して外側施療子61b,62bに対応して設けられた軸受部材76の軸受孔76a(図9参照)が外嵌する偏芯軸部92aと、該偏芯軸部92aの左右方向の外方端から拡径方向へ張り出した大径円柱状のツバ部92bとを有し、偏芯軸部92a及びツバ部92bを左右方向へ貫通する貫通孔92cが形成されている。この貫通孔92cについても、その軸芯は、偏芯軸部92aの軸芯92dから所定寸法だけ偏芯している。従って、図15(b)に示すように、外側偏芯軸部材92の貫通孔92cにシャフト部90bが挿通されると、偏芯軸部92aの軸芯92dは、第2支持シャフト77の軸芯77aに対して所定寸法D2だけ偏芯して位置することとなる。
【0062】
また、外側偏芯軸部材92に対して左右方向の外方には、スペーサ94を挟んで円環状のエンド部材93が配設されている。更に、このようにしてシャフト部90bに挿通された内側偏芯軸部材91及び外側偏芯軸部材92は、夫々のツバ部91b,92bに径方向へ貫通形成された孔91e,92eへ係止ピン95が圧入され、係止ピン95の先端がシャフト部90bの周面に当接することにより、シャフト部90bに対して固定される。
【0063】
ところで、本実施の形態においては、図15(b)に示すように、内側偏芯軸部材91の軸芯91dと外側偏芯軸部材92の軸芯92dとは、第2支持シャフト77の軸芯77aを中心とする位相が互いに異なっており、より具体的には、180度の位相差を有するように構成されている。従って、第2支持シャフト77が、叩きモータ81の駆動により軸芯77a回りに回動すると、内側施療子61a,62aと外側施療子61b,62bとは、被施療者の身体の背面側への相対的な突出寸法が変更される。また、左右の内側偏芯軸部材91,91の軸芯91d,91dは、第2支持シャフト77の軸芯77aを中心とする位相が互いに異なっており、より具体的には、180度の位相差を有するように構成され、左右の外側偏芯軸部材92,92の軸芯92d,92dは、第2支持シャフト77の軸芯77aを中心とする位相が互いに異なっており、より具体的には、180度の位相差を有するように構成されている(図9も合わせて参照)。従って、第2支持シャフト77が、叩きモータ81の駆動により軸芯77a回りに回動すると、左右の内側施療子61a,62aは、被施療者の身体の背面側への相対的な突出寸法が夫々変更され、左右の外側施療子61b,62bは、被施療者の身体の背面側への相対的な突出寸法が夫々変更される。
【0064】
また、叩きモータ81を適宜停止させることにより、内側施療子61a,62aと外側施療子61b,62bとを、これらの進退動作可能範囲内の任意の位置で維持することが可能である。更に、マッサージ機構9を背凭れ部4に位置させて叩きモータ81を連続的に駆動することにより、内側施療子61a,62aと外側施療子61b,62bと繰り返し交互に進退動作させ、背凭れ部4に支持された左半身と右半身とを、独立して叩きマッサージすることができ、左右の内側施療子61a,62aを繰り返し交互に進退動作させ、背凭れ部4に支持された背中の左右中心である背筋を叩きマッサージすることができる。即ち、内側施療子61a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)及び外側施療子61b(第2外側施療子60c,60d)により、左半身に対してマッサージ師が実際に両手でするような叩きマッサージをすることができ、内側施療子62a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)及び外側施療子62b(第2外側施療子60c,60d)により、右半身に対して同様の叩きマッサージを左半身とは独立して行うことができる。更には、対の内側施療子61a,62a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)により、背筋に対して叩きマッサージすることができ、対の外側施療子61b,62b(第2外側施療子60c,60d)により、上半身の側面(例えば脇等)に対しても叩きマッサージすることができる。
【0065】
また、昇降モータ14を駆動してマッサージ機構9を座部3まで移動させて、叩きモータ81を連続的に駆動させれば、臀部や大腿部における左部分と右部分とを、上半身と同様に、独立して叩きマッサージすることができると共に、臀部や大腿部における左右中央部分を叩きマッサージすることができる。また、昇降モータ14を駆動してマッサージ機構9をフットレスト5まで移動させて、叩きモータ81を連続的に駆動させれば、対を成す内側施療子61a及び外側施療子61bにより、左脚と右脚とを、上半身と同様に、独立して叩きマッサージすることができる。
【0066】
加えて、本実施の形態に係るマッサージ機構9は、揉みモータ80と叩きモータ81とを互いに独立して動作可能であるため、例えば、揉みモータ80の駆動により、内側施療子61a,62aと外側施療子61b,62bとの左右方向の離隔距離を被施療者の好みに設定しつつ、叩きモータ81の駆動により叩きマッサージを行うことも可能である。また、叩きモータ81の駆動により、内側施療子61a,62aと外側施療子61b,62bとの相対的な突出寸法を被施療者の好みに設定しつつ、揉みモータ80の駆動により揉みマッサージを行うことも可能である。これにより、被施療者に対する揉みマッサージ及び叩きマッサージの対象範囲が拡大すると共に、被施療者自身が身体を動かさずとも、内側施療子61a,62aと外側施療子61b,62bとを移動させて、所望の部位をマッサージすることができる。更には、揉みモータ80及び叩きモータ81を同時に駆動したり、駆動中の回転速度及び回転方向を変化させることにより、多様なマッサージ効果を得ることができる。
【0067】
更に、図6〜図9に示すように、マッサージ機構9は、対を成す内側施療子61a(62a)と外側施療子61b(62b)との間において左脚及び右脚の夫々の背面をマッサージする左右で対をなす背面施療子25を備えている。左脚に対応する背面施療子25は、左右方向へ軸芯を沿うよう配設された第3支持シャフト52が挿通されたローラ部材により構成され、第3支持シャフト52と一体回転可能に構成されている。この第3支持シャフト52は、第2支持シャフト77に設けられたプーリ77bと第3支持シャフト52に設けられたプーリ52bとがベルト(図示せず)で連結されて、第2支持シャフト77の回転に連動して回転可能に構成されている。従って、叩きモータ81の駆動によって、第2支持シャフト77と第3支持シャフト52は連動して回転する。背面施療子25は、対を成す内側施療子61aと外側施療子61bとの間であって両施療子61a,61bよりも後方に位置しており、マッサージ機構9をフットレスト5に位置させて、内側施療子61a及び外側施療子61bにより脚部を挟むように揉みマッサージできると共に、背面施療子25により脚部の背面をさするようにマッサージすることができる。なお、右脚に対応する背面施療子25については、左脚に対応する背面施療子25の各構成と同様になっているのでここでの説明は省略する。
【0068】
第3支持シャフト52を第2支持シャフト77に連動連結させているため、第3支持シャフト52を回転させる駆動源を別途設ける必要がなく、低コスト化することができる。しかも、第3支持シャフト52は、叩きモータ81に接続された第2支持シャフト77に連動連結されているため、揉みモータ80に接続された第1支持シャフト72に連動連結するよりも第3支持シャフト52の回転速度を速くすることができ、良好なさすりマッサージを実現できる。なお、第3支持シャフト52を独立して回転駆動させる駆動源(さすりモータ)を別途設けてもよい。
【0069】
[マッサージ機構の他の構成]
以下、マッサージ機構に適用できる他の構成について説明する。図18は、他の構成のマッサージ機構100を前方斜め上方から見たときの外観斜視図であり、可動フレーム28が最も後退した状態を示しており、図19は、他の構成のマッサージ機構100を前方斜め上方から見たときの外観斜視図であり、可動フレーム28が最も進出した状態を示しており、図20は、他の構成のマッサージ機構100に係る進退ユニット101及び体圧センサ102の構成について分解して示す分解斜視図である。なお、図18及び図19においては、右側施療子62の図示を省略している。そして、図18及び図19に示す実施形態のマッサージ機構100の構成について、前述した図6〜図9に示す実施形態のマッサージ機構9と異なる点は、進退ユニット101及び体圧センサ102の構成のみであり、その他の構成については同一符号を付してその説明を省略する。
【0070】
[進退ユニットの構成]
進退ユニット101は、ベースフレーム27である後部フレーム27bに取り付けられたベースユニット103と、可動フレーム28である連結フレーム28c(ギヤボックス78)に取り付けられた可動ユニット104と、可動ユニット104をベースユニット103に対して直線的に進退させる進退駆動部15(図20も参照)と、により構成されており、全体としてベースフレーム27に対して前後に揺動自在に取り付けられている。ベースユニット103は、その後部がブラケット27cを介して後部フレーム27bに枢支されており、その前部が軸芯C3回りに揺動自在に構成されている。
【0071】
進退駆動部15は、ベースユニット103に取り付けられた前後方向に延びるネジ軸15aと、ネジ軸15aと螺合しネジ推力によって前後方向に直線的に移動するナット15bと、ネジ軸15aを回転させる進退モータ15cと、により構成されている。この進退モータ15cは、制御部50(図5参照)からの信号により出力軸の回転方向及び回転速度が制御され、可動ユニット104の移動方向を切り替えたり、可動ユニット104の位置決めを行ったりすることができる。また、制御部50は、昇降モータ14を駆動させてマッサージ機構100を身長方向に移動させる際、可動ユニット104を後退させるよう進退モータ15cを制御するよう構成されており、マッサージ機構100の移動をスムーズに行うことができる。
【0072】
図20に示すように、可動ユニット104は、可動フレーム28である連結フレーム28c(ギヤボックス78)に取り付けられた第1部材105と、第1部材105を移動自在に支持すると共にナット15bにナット取付部106aを介して連結された第2部材106と、第1部材105と第2部材106の間に設けられ第1部材105を前方(被施療部側)へ付勢する付勢部材としてのバネ107と、により構成されている。第1部材105は、第1部材105を連結フレーム28cに接続するジョイント部105aと、第1部材105の内部に形成されたバネ107の前端部が当接する当接部105bと、第1部材105の内部に形成され後述する被検出体108を支持する被検出体取付部105cと、により構成されている。そして、第1部材105は、左右で対をなす左側の第1部材105L及び右側の第1部材105Rを有し、第2部材106は、左右で対をなす左側の第2部材106L及び右側の第2部材106Rを有し、ナット15b及びバネ107を外側方から挟み込むように対の第2部材106L,106Rを夫々連結し、更に第2部材106を外側方から挟み込むように対の第1部材105L,105Rを夫々連結して可動ユニット104が構成されている。
【0073】
第2部材106は、第2部材106をナット15bに接続するナット取付部106aと、第2部材106の内部に形成されたバネ107の後端部が当接するバネ受け106bと、検出体109を支持する検出体取付部106cと、により構成されている。付勢部材としてのバネ107は、その前端部が第1部材105が有する当接部105bに当接し、その後端部が第2部材106が有するバネ受け106bに当接しており、第1部材105を前方(被施療者側)へ常時付勢するよう構成されている。
【0074】
このように進退ユニット101が全体としてベースフレーム27に対して揺動自在に設けられているため、可動ユニット104が直線的に前後移動しても、進退ユニット101と昇降シャフト31との距離を一定に保つことができ、進退ユニット101は、可動フレーム28をベースフレーム27に対して図18に示す状態から図19に示す状態の間で矢視aの方向に揺動させることが可能となる。従って、進退駆動部15として直線的な運動を生じさせる構成を採用しているので、進退駆動部15の構成を簡素化することができると共に、マッサージ機構100を揺動させて施療子60により被施療者の肩を上方からマッサージすることが可能となる。
【0075】
図20に示すように、体圧センサ102は、第1部材105に設けられ第1部材105と共に移動する被検出体108と、第2部材106に設けられ被検出体108の位置を検出する検出体109と、により構成されている。この体圧センサ102の構成を具体的に説明する。体圧センサ102は、ベースユニット103の前方に位置する可動ユニット104に設けられている。そして、この検出体109は、発光部109aと、この発光部109aに対して左右方向に所定間隔を有して対向配置された受光部109bとを有しており、被検出体108は、発光部109aと受光部109bの間を前後にスライド移動自在であり、発光部109aからの光を透過させる複数の孔部108a〜108dを有した遮蔽板により構成されている。そして、発光部109aは複数の発光素子(図示せず)を有しており、受光部109bは前記発光素子と同数の受光素子(図示せず)を有している。このように構成された検出体109は、受光部109aが検出する孔部108a〜108dより透過する透過光の個数により、被検出体108の前後位置を検出するよう構成されている。本実施形態では、孔部108a〜108dは複数個(より具体的には4個)設けられており、被検出体の前後位置を複数段階(より具体的には6段階)に検出可能である。
【0076】
制御部50は、体圧センサ102により検出した第1部材105の前後位置に応じて、進退モータ15cを駆動制御して、可動ユニット104の進退量を調整するよう構成されている。具体的には、被施療者の体圧により、バネ107の付勢力に抗して第1部材105が第2部材106に対して後退して所定の前後位置となったことを体圧センサ102が検出すると、進退モータ15cを駆動制御して、可動ユニット104を所定量後退させるよう構成されている。この場合、第1部材105の前後におけるニュートラル位置を制御部50が有するメモリに記憶させておき、常時ニュートラル位置となるよう進退モータ15cを駆動制御する。あるいは、制御部50は、第1部材105が常時所定の前後位置(ニュートラル位置)となるよう進退モータ15cを駆動制御して、可動ユニット104の進退量を調整するよう構成されていてもよい。
【0077】
[ロッキング動作に係る構成]
以下、マッサージ機1のロッキング動作について、図1〜図5、及び図21に基づいて具体的に説明する。図21は、脚フレーム6と本体フレーム7の位置関係を示す平面模式図であり、(a)は椅子本体2が前位置又は第1所定位置に位置している状態であり、(b)は椅子本体2が後位置又は第1所定位置に位置している状態を夫々示している。
【0078】
本発明のマッサージ機1は、被施療者が着座する座部3と、被施療者が凭れる背凭れ部4と、で構成される椅子本体2と、椅子本体2を前後に揺動可能に支持する脚フレーム6と、椅子本体2を前後に揺動させる揺動駆動部10と、椅子本体2を前後に往復揺動させる中で、前後の軌道端部の手前で揺動速度を減速させるよう制御する制御部50と、を有している。
このような構成とすることにより、椅子本体2の揺動方向の切り替えを滑らかに行うことができ、被施療者に快適な揺れを与えることができる。
【0079】
また、椅子本体2の前記軌道端部における位置を検出する第1センサ20と、椅子本体2の前記軌道端部手前における第1所定位置を検出する第2センサ21と、を有し、第2センサ21が前記第1所定位置を検出すると、制御部50は椅子本体2の揺動速度を減速させるよう制御する。
このような構成とすることにより、椅子本体2の軌道端部手前の第1所定位置を的確に検出して、椅子本体2の揺動を減速させる時間を確保することができる。
【0080】
また、揺動駆動部10は、モータ10aと、モータ10aの駆動により伸縮するロッド10bと、により構成され、第1センサ20は、ロッド10bの伸縮ストロークエンドを検出するよう構成され、第1センサ20がロッド10bの伸縮ストロークエンドを検出すると、制御部50は椅子本体2の揺動方向を反転させるべくモータ10aの回転方向を切り替えるよう制御する。
このような構成とすることにより、揺動駆動部10を簡単な構成とした場合であっても、椅子本体2の揺動方向の切り替えを滑らかに行うことができる。
【0081】
また、前記第2センサ21は、前後の第1所定位置の間に位置する第2所定位置を検出するよう構成されている。
このような構成とすることにより、椅子本体2の軌道端部の間における第2所定位置を検出することができ、椅子本体2を往復揺動させる範囲を変更することができる。例えば、往復揺動させる範囲を前後の軌道端部間、軌道前端部と第2所定位置の間、又は軌道後端部と第2所定位置の間と様々に設定することができる。
【0082】
図21に示すとおり、前述した揺動駆動部10は、モータ10aと、モータ10aの駆動により伸縮するロッド10bとにより構成されている。このモータ10aは、制御部50に電気的に接続されており、制御部50からの指示に従って予め設定されたプログラムにより動作する他、制御部50に接続されたリモートコントローラ55を被施療者が操作することにより制御部50へ入力された信号に基づいても動作することができる(図5参照)。そして、モータ10aの回転速度及び回転方向は、制御部50からの指示に従って適宜設定される。モータ10aの回転速度に椅子本体2の揺動速度が対応しており、モータ10aの回転方向に椅子本体2の揺動方向が対応している。そして、ロッド10bは、自身の伸縮ストロークエンドを検出する第1センサ20を有しており、最も伸長した状態(図3に示す前位置状態)と、最も収縮した状態(図4に示す後位置状態)を検出できるよう構成されている。この第1センサ20は制御部50に電気的に接続されている。
【0083】
また、図21に示すとおり、本発明のマッサージ機1には、脚フレーム6に対する椅子本体2の所定の前後位置を検出する第2センサ21が設けられている。この第2センサ21は非接触式センサであり、本体フレーム7の連結部材7eに設けられた磁性体等よりなる被検出体22と、脚フレーム6に設けられたホールIC等よりなる検出体23と、により構成されている。この検出体23は、前後方向に複数(本実施形態では3つ)設けられており、椅子本体2の軌道端部手前(軌道端部近傍)に位置する第1所定位置を検出する検出体23a,23aと、前後の第1所定位置の間に位置する第2所定位置を検出する検出体23bと、を有している。この第2センサ21は制御部50に電気的に接続されている。なお、図3、図4、及び図21から理解できるとおり、椅子本体2が前位置状態に近づく程、連結部材7eは後方に位置することとなり、椅子本体2が後位置状態に近づく程、連結部材7eは前方に位置することとなる。
【0084】
本実施形態では、第1所定位置は、椅子本体2が図3及び図4に示す前位置状態及び後位置状態となる手前の位置であり、第2所定位置は、前位置状態と後位置状態との略中間位置である。図21(a)に示すとおり、第1センサ20が前位置にある本体フレーム7(実線で図示)を検出することができ、第2センサ21が第1所定位置にある本体フレーム7(二点鎖線で図示)を検出することができる。また、図21(b)に示すとおり、第1センサ20が後位置にある本体フレーム7(実線で図示)を検出することができ、第2センサ21が第1所定位置にある本体フレーム7(二点鎖線で図示)を検出することができる。
【0085】
制御部50は、椅子本体2を脚フレーム6に対して前後に往復揺動させる中で、検出体23aが被検出体22の通過を検出すると、モータ10aの回転速度を減速させるよう制御する。そして、制御部50は、第1センサ20によって椅子本体2が軌道端部(前位置状態又は後位置状態)に到達したことを検出すると、モータ10aの回転方向を反転させるよう制御する。すなわち、制御部50は、椅子本体2を前位置状態から後方に揺動させる中で、第2検出センサ21によって椅子本体2が第1所定位置となったことを検出すると椅子本体2の後方への揺動速度を減速させ、続いて第1検出センサ20によって椅子本体2が後位置状態となったことを検出すると揺動方向を切り替えて椅子本体2を前方に揺動させる。続いて、制御部50は、椅子本体2を後位置状態から前方に揺動させる中で、第2検出センサ21によって椅子本体2が第1所定位置となったことを検出すると椅子本体2の前方への揺動速度を減速させ、続いて第1検出センサ20によって椅子本体2が前位置状態となったことを検出すると揺動方向を切り替えて椅子本体2を後方に揺動させる。なお、制御部50は、上記サイクルを繰り返し実行する。
【0086】
また、制御部50は、椅子本体2を脚フレーム6に対して前後に往復揺動させる中で、検出体23bが被検出体の通過を検出すると、モータ10aの回転方向を反転させるよう制御することもでき、椅子本体2を往復揺動させる範囲を、前後の軌道端部間、軌道前端部と第2所定位置の間、又は軌道後端部と第2所定位置の間と様々に設定することができる。椅子本体2を往復揺動させる範囲は、リモートコントローラ55を被施療者が操作することにより設定してもよいし、予め設定されたプログラムに従って時系列的に可変されるよう構成してもよい。往復揺動範囲がプログラムに従って時系列的に可変される構成とした場合、被施療者に対してバリエーションに富んだ揺れを与えることができ、よりリラックス感を与えることができる。
【0087】
[ストレッチ動作に係る構成]
以下、マッサージ機1の各ストレッチ動作について、図22〜図29に基づいて具体的に説明する。図22は幅センサ40の構成を示す模式図である。図23は各施療子61a,61b,62a,62bの近接状態を説明する説明図であり、(a)は第1近接状態を、(b)は第2近接状態を、(c)は幅広状態を夫々示している。なお、図22は、ヘリカルギヤ80aが有する回転軸80bの軸方向から見た図である。また、ストレッチ動作に関する以下の説明においては、図4に示す後位置状態におけるマッサージ機1に着座した被施療者から見たときの方向の概念と一致するものとし、その他の場合は適宜説明するものとする。ただし、マッサージ機構9の各構成に関する説明においては、身長方向を上下方向とし頭部側を「上」、腰部側を「下」と規定して説明する。また、以下の説明で用いる「脚部」とは、大腿部から足先に至る部位における少なくともいずれかを含む部位を指すものとする。
【0088】
図5に示すように、マッサージ機1は、制御部50に電気的に接続され、各施療子60a〜60hの左右位置を検出する幅センサ40を有している。この幅センサ40は、図22に示すように、揉みモータ80の出力軸に連動連結されたギヤボックス78内のヘリカルギヤ(減速器)80aの回転軸80bに一体回転可能に設けられた非検出体40aと、可動フレーム28に設けられ非検出体40aの通過を検出する検出体40bと、により構成された非接触式センサ(例えばホールIC)である。そして、非検出体40aが検出体40bを通過した回数を検出することにより、ヘリカルギヤ80aの回転数をパルス化して、そのパルス数を検出することにより、各施療子60a〜60hの左右位置を検出する。なお、この非検出体40aは、揉みモータ80の出力軸に一体回転可能に設けられていてもよいし、第1支持シャフト72に一体回転可能に設けられていてもよい。
【0089】
以下の説明では、図23(a)に示す下側の内側施療子61a(60f)及び下側の外側施療子61b(60h)が上側のそれらよりも近接し、且つ上側の対の内側施療子61a(60a),62a(60a)が下側のそれらよりも近接した状態を「第1近接状態」と称し、図23(b)に示す上側の内側施療子61a(60e)及び上側の外側施療子61b(60g)が下側のそれらよりも近接し、且つ下側の対の内側施療子61a(60b),62a(60b)が上側のそれらよりも近接した状態を「第2近接状態」と称する。また、この第1近接状態及び第2近接状態を総称して「幅狭状態」と称し、図23(c)に示す両アーム68,69が前方から見て略平行である状態を「幅広状態」と称する。そして、この幅センサ40は、第1近接状態(幅狭状態)、第2近接状態(幅狭状態)、及び幅広状態を夫々検出可能となっており、また揉みモータ80の回転方向についても検出可能となっている。
【0090】
図5に示すように、各ストレッチ動作を実行するためには、まず、被施療者は椅子本体2に着座してリモートコントローラ55の電源釦55aを操作して電源を入れ、コース釦55b〜55eを操作して所望するストレッチ動作が含まれるマッサージコースを設定する。前記操作を行うと、制御部50は揺動駆動部10を駆動制御してマッサージ機1を図4に示す後位置状態とさせる。従って、後述する各ストレッチ動作(その1〜その6)は後位置状態で行われることとなるが、好みに応じて被施療者がリモートコントローラ55を操作して図3に示す前位置状態に戻して各ストレッチ動作を行うことも可能である。
【0091】
[ストレッチ動作(その1)]
図24はストレッチ動作(その1)の動作説明図であり、(a)はマッサージ機構9が後退した状態、(b)はマッサージ機構9が進出した状態を夫々示している。ストレッチ動作(その1)は、マッサージ機構9を前後に揺動させて被施療者の脚部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その1)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9をフットレスト5の所定位置に位置させ、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、内側施療子61a,62a及び外側施療子61b,62bにより、左右の脚部を夫々挟持する。なお、被施療者の脚部は足先側に向かって先細り形状であるため、各施療子60の左右位置を下側の施療子60f,60hが相互に近接した第1近接状態とすることにより、脚部を効果的に挟持することができる。
【0092】
続いて、内側施療子61a,62a及び外側施療子61b,62bにより左右の脚部を夫々挟持した状態で進退モータ15cを駆動制御して、図24(a)に示す所定量後退した状態にあるマッサージ機構9(可動フレーム28)を図24(b)に示す所定量進出した状態まで矢視bに沿って前方へ揺動させる。従って、施療子60f,60hにより脚部が挟持された状態で、膝部分が矢視cに沿って略上方に持ち上げられて膝が曲げられ、且つ脹脛部分が矢視dに沿って略下方へ引き下げられるので、十分な脚伸ばし効果を得ることができる。この場合は、大腿部の表面側の筋肉が伸張されることとなる。
【0093】
続いて、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を幅広状態とさせて、内側施療子61a,62a及び外側施療子61b,62bにより挟持した脚部を開放する。そして、左右の脚部を開放した幅広状態で進退モータ15cを駆動制御して、図24(b)に示す所定量進出した状態にあるマッサージ機構9(可動フレーム28)を図24(a)に示す所定量後退した状態まで矢視eに沿って後方へ揺動させる。従って、膝部分が自重により矢視fに沿って略下方に移動して膝が伸ばされる。このように、このストレッチ動作(その1)は、内側施療子61a,62a及び外側施療子61b,62bによる脚部を挟持した状態でのマッサージ機構9の前方揺動と、脚部を開放した状態でのマッサージ機構9の後方揺動と、を交互に繰り返し行うことによって、脚部に対する緊張と弛緩が繰り返されるので、快適なストレッチ感を得ることができる。なお、マッサージ機構9を後方揺動させる動作は、脚部を開放させずに、内側施療子61a,62a及び外側施療子61b,62bによって脚部を挟持した状態(第1近接状態)で行ってもよい。
【0094】
[ストレッチ動作(その2)]
図25はストレッチ動作(その2)の動作説明図であり、(a)はマッサージ機構9が脹脛に位置した状態、(b)はマッサージ機構9が足首に位置した状態を夫々示している。ストレッチ動作(その2)は、マッサージ機構9を身長方向に移動させて被施療者の脚部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その2)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9をフットレスト5の所定位置に位置させ、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、内側施療子61a,62a及び外側施療子61b,62bにより、左右の脚部を夫々挟持する。なお、被施療者の脚部は足先側に向かって先細り形状であるため、各施療子60の左右位置を下側の施療子60f,60hが相互に近接した第1近接状態とすることにより、脚部を効果的に挟持することができる。
【0095】
続いて、内側施療子61a,62a及び外側施療子61b,62bにより左右の脚部を夫々挟持した状態で昇降モータ14を駆動制御して、図25(a)に示す脹脛近傍に位置するマッサージ機構9を図25(b)に示す足首近傍まで身長方向(矢視h)に沿って略前方へ移動させる。従って、施療子60f,60hにより脚部が挟持された状態で、脹脛がその長手方向へ引き伸ばされて膝が伸びるので、十分な脚伸ばし効果を得ることができる。
【0096】
続いて、内側施療子61a,62a及び外側施療子61b,62bにより左右の脚部を夫々挟持した状態で昇降モータ14を駆動制御して、図25(b)に示す足首近傍に位置するマッサージ機構9を図25(a)に示す脹脛近傍まで身長方向(矢視i)に沿って略後方へ移動させる。従って、施療子60f,60hにより脚部が挟持された状態で、脹脛をその長手方向膝側へ移動させるので、膝を曲げる脚部の屈曲運動を行わせることができる。このストレッチ動作(その2)において、内側施療子61a,62a及び外側施療子61b,62bによる脚部を挟持した状態でのマッサージ機構9の前方移動と後方移動は、交互に繰り返し行っても良いし、いずれか一方の移動を単独で行っても良い。また、ストレッチ動作(その1)とストレッチ動作(その2)は複合して実行されてもよい。また、ストレッチ動作(その1)とストレッチ動作(その2)は、各施療子60の左右位置を上側の施療子60e,60gが相互に近接した第2近接状態として行ってもよい。
【0097】
[ストレッチ動作(その3)]
図26はストレッチ動作(その3)の動作説明図であり、(a)はマッサージ機構9が首部に位置した状態を背中側から見た模式図、(b)は(a)を側面から見た模式図でありマッサージ機構9が後退した状態、(c)は(a)を側面から見た模式図でありマッサージ機構9が進出した状態を夫々示している。ストレッチ動作(その3)は、マッサージ機構9を前後に揺動させて被施療者の首部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その3)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9を背凭れ部4の所定位置に位置させ、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、図26(a)に示すように対の内側施療子61a,62aにより首部を挟持する。なお、各施療子60の左右位置を上側の施療子60a,60aが相互に近接した第1近接状態として行うことにより、マッサージ機構9の身長方向頭部側への移動限界位置を低く設定することができ、また、好ましくない頭部へのマッサージを避けることができる。
【0098】
続いて、対の内側施療子61a,62aにより首部を挟持した状態で進退モータ15cを駆動制御して、図26(b)に示す所定量後退した状態のマッサージ機構9を図26(c)に示す所定量進出した状態まで矢視jに沿ってマッサージ機構を前方へ揺動させる。従って、図26(c)に示すように頭部が前傾されるので、首筋伸ばし効果を得ることができる。続いて、対の内側施療子61a,62aにより首部を挟持した状態で進退モータ15cを駆動制御して、図26(c)に示す所定量進出した状態のマッサージ機構9を図26(b)に示す所定量後退した状態まで矢視kに沿ってマッサージ機構を後方へ揺動させる。従って、図26(b)に示すように頭部が後傾されるので、首筋伸ばし効果を得ることができる。
【0099】
[ストレッチ動作(その4)]
図27はストレッチ動作(その4)の動作説明図であり、(a)はマッサージ機構9が肩部に位置した状態を背中側から見た模式図、(b)は(a)を側面から見た模式図、(c)はマッサージ機構9が首部に位置した状態を背中側から見た模式図、(d)は(c)を側面から見た模式図である。ストレッチ動作(その4)は、マッサージ機構9を身長方向に移動させて被施療者の首部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その4)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9を背凭れ部4の所定位置に位置させ、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、図27(a)及び図27(c)に示すように対の内側施療子61a,62aにより首部を挟持する。なお、各施療子60の左右位置を上側の施療子60a,60aが相互に近接した第1近接状態とすることにより、マッサージ機構9の身長方向頭部側への移動限界位置を低く設定することができ、また、好ましくない頭部へのマッサージを避けることができる。
【0100】
続いて、対の内側施療子61a,62aにより首部を挟持した状態で昇降モータ14を駆動制御して、図27(b)に示す施療子60aが肩部(首の付け根)近傍に位置するマッサージ機構9を図27(d)に示す施療子60aが後頭部近傍に位置するまで身長方向(矢視l)に沿って略後方へ移動させる。従って、施療子60a,60aにより首部が挟持された状態で、首部がその長手方向へ引き伸ばされるので、十分な首筋伸ばし効果を得ることができる。
【0101】
このストレッチ動作(その3)及びストレッチ動作(その4)は、例えば、コース釦55d〜55eを複数操作することにより、複合して実行することもできる。この場合、制御部50は、昇降モータ14を駆動制御してマッサージ機構9を背凭れ部4の所定位置(例えば腰位置)に位置させ、進退モータ15cを駆動制御してマッサージ機構9を例えば図26(c)に示す状態まで所定量進出させる。続いて、昇降モータ14を駆動制御して、マッサージ機構9を所定量進出させた状態で背凭れ部4における首部近傍まで身長方向に沿って後方へ移動させる。続いて、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、対の内側施療子61a,62aにより首部を挟持し、且つ進退モータ15cを駆動制御してマッサージ機構9を例えば図26(b)に示す状態まで所定量後退させる。このようにマッサージ機構9を動作させることにより、施療子60a,60aにより首部が挟持された状態で、首部がその長手方向へ引き伸ばされながら頭部が後傾されるので、より大きな首筋伸ばし効果を得ることができる。
【0102】
[ストレッチ動作(その5)]
図28はストレッチ動作(その5)の動作説明図であり、(a)は第1近接状態のマッサージ機構9が腰部に位置した状態を背中側から見た模式図、(b)は第2近接状態のマッサージ機構9が首部に位置した状態を背中側から見た模式図である。ストレッチ動作(その5)は、マッサージ機構9を身長方向に移動させて被施療者の背中に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その5)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9を背凭れ部4の所定位置に位置させる。マッサージ機構9を腰部側から頭部側へ移動させる際には、図28(a)に示すように、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせた状態で、昇降モータ14を駆動制御してマッサージ機構9を身長方向(矢視m)に沿って移動させる。一方、マッサージ機構9を頭部側から腰部側へ移動させる際には、図28(b)に示すように、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第2近接状態とさせた状態で、昇降モータ14を駆動制御してマッサージ機構9を身長方向(矢視n)に沿って移動させる。このようにマッサージ機構9を動作させることにより、対をなす内側施療子61a,62aの離隔距離ついて、マッサージ機構9の進行方向側を小さく設定しているので、十分な開胸ストレッチ効果を得ることができる。なお、マッサージ機構9を単なる移動目的で身長方向に移動させる際には、図23(c)に示すように各施療子60の左右位置を幅狭状態とさせて、マッサージ機構9を移動させる。
【0103】
[ストレッチ動作(その6)]
図29はストレッチ動作(その6)の動作説明図であり、(a)はマッサージ機構9が臀部に位置した状態を足先側から見た模式図、(b)は(a)を側面から見た模式図、(c)はマッサージ機構9が脚部に位置した状態を足先側から見た模式図、(d)は(c)を側面から見た模式図である。ストレッチ動作(その6)は、マッサージ機構9を身長方向に移動させて被施療者の脚部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その6)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御して、図29(b)に示すようにマッサージ機構9を座部3の所定位置に位置させ、揉みモータ80を駆動制御して、図29(a)に示すように幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせる。
【0104】
続いて、各施療子60の左右位置を第1近接状態とさせた状態で昇降モータ14を駆動制御してマッサージ機構9を座部3の所定位置から図29(d)に示すようにフットレスト5の所定位置まで身長方向(矢視o)に沿って移動させる。すなわち、対をなす下側の内側施療子61a(62a)及び下側の外側施療子61b(62b)の離隔距離を、図29(c)に示すように下側の両施療子61a(62a),61b(62b)が脚部の背面に当接可能なる幅分に維持した状態で、マッサージ機構9を座部3からフットレスト5にかけて移動させるのである。このようにマッサージ機構9を動作させることにより、対をなす内側施療子61a(62a)及び外側施療子61b(62b)の間に脚部が落ち込まず、両施療子61a(62a),61b(62b)が脚部の背面に当接した状態で、マッサージ機構9が脚部の長手方向に沿って足先側へ移動する。従って、膝が伸ばされ大腿部の背面側の筋肉が伸長されるので、十分な脚伸ばし効果を得ることができる。
【0105】
また、本発明のマッサージ機は、図示する形態に限らずこの発明の範囲内において他の形態のものであってもよい。
例えば、進退駆動部15は、マッサージ機構9の後面に設けた膨張収縮するエアセルにより構成してもよいし、マッサージ機構9の側面に設けたラック・ピニオン機構により構成してもよい。この場合、例えば、ベースフレーム27の側部フレーム27aにラックを設け、可動フレーム28の側部フレーム28aにピニオンを設けた構成とするのが好適である。これらのように構成された進退駆動部は、制御部50からの信号により、前述した進退駆動部15を用いた場合と同様の進退動作をマッサージ機構9,100に行わせることができる。
あるいは、このマッサージ機構9,100を、ガイドレールが背凭れ部のみに内装されているマッサージ機に適用してもよい。この場合、マッサージ機構9,100は、背凭れ部内のみを身長方向に沿って移動自在となる。
【産業上の利用可能性】
【0106】
本発明は、椅子本体内又はフットレスト内を移動自在に構成されたマッサージ機構を利用して、被施療者の被施療部に対してストレッチ運動を行わせることを可能としたマッサージ機に適用することができる。
【符号の説明】
【0107】
1 マッサージ機
2 椅子本体
3 座部
4 背凭れ部
5 フットレスト
9,100 マッサージ機構
29,101 進退ユニット
50 制御部
61a 内側施療子
61b 外側施療子
62a 内側施療子
62b 外側施療子
68,69 アーム
72 第1支持シャフト
80 駆動手段(揉みモータ)
81 駆動手段(叩きモータ)
84 内側傾斜軸部材
85 外側傾斜軸部材
【技術分野】
【0001】
本発明は、椅子本体内又はフットレスト内を移動自在に構成されたマッサージ機構を利用して、被施療者の被施療部に対してストレッチ運動を行わせることを可能としたマッサージ機に関する。
【背景技術】
【0002】
従来、背凭れ部、座部、及びフットレストにかけて一体的に形成したロングガイドレールに沿ってマッサージ機構を移動可能とし、このマッサージ機構によって被施療者の上半身から下半身にかけてマッサージ可能とした椅子型マッサージ機が知られている(例えば、特許文献1)。
また、下肢の側部を両側から挟持する対の施療子を備え、この施療子を下肢に沿って移動させることができ、施療子の動作と下肢に沿った移動とを組み合わせて行う下肢用マッサージ装置が知られている(例えば、特許文献2)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−283266号公報
【特許文献2】特開2010−75428号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記特許文献1に開示された椅子型マッサージ機においては、マッサージ機構により被施療者の上半身から下半身をマッサージ可能であるが、マッサージ機構に設けられた施療子が左右一対のみで構成されているため、被施療者の上半身をマッサージする際は、上半身における左半身と右半身の夫々に対応した揉み等のマッサージを行うことができず、かつ施療範囲も狭く良好なマッサージ効果を得ることができない。また、被施療者の下半身をマッサージする際は、被施療者の左右の脚部を夫々挟むことができない。
一方、上記特許文献2に開示された下肢用マッサージ装置においては、対をなす施療子により左右の脚部を夫々挟んで下肢に沿って移動させることにより、施療子が動く軌跡を多様なものとすることができるが、施療対象は脚部のみであり施療範囲が狭い。
【0005】
そこで、本発明1は、上述した問題を解消するためになされたものであり、被施療者の上半身における左半身と右半身の夫々に対応した揉みマッサージ等が可能であり、且つ被施療者の左脚と右脚の夫々を挟むことが可能なマッサージ機構を利用して、被施療者の被施療部に対してストレッチ運動を行うことができるマッサージ機を提供することを目的とする。
また、本発明2及び本発明3は、十分な脚伸ばし効果を得ることができるマッサージ機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明1は、被施療者が着座する座部と、被施療者が凭れる背凭れ部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、前記椅子本体内において、前記背凭れ部から前記座部を経由して前記フットレストまでの間を移動自在に設けられたマッサージ機構と、前記マッサージ機構の動作を制御する制御部と、を有し、前記マッサージ機構は、左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、前記施療子により被施療部を挟んだ状態で、前記マッサージ機構を前後方向又は身長方向へ移動させるよう制御することを特徴とする。
このような構成とすることにより、マッサージ機構が背凭れ部に位置しているときには、上半身における左半身及び右半身の夫々に対して個別に摘むようにして揉みマッサージを行うことができると共に、マッサージ機構がフットレストに位置しているときには、脚部における左脚及び右脚の夫々に対して個別に挟むことができる。しかも、施療子が被施療部を挟んだ状態でマッサージ機構を前後方向又は身長方向へ移動させることにより、被施療部に対してストレッチ運動も行うことができる。
【0007】
また、前記マッサージ機構は、該マッサージ機構を被施療部に対して前後揺動させる進退ユニットを有し、前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御することが好ましい。
このような構成とすることにより、特にマッサージ機構を前方へ揺動させた場合には、脚部を挟持した施療子が、膝を略上方に持ち上げて膝の曲げ量を大きくした状態で脹脛を略下方へ引き下げるので、十分な脚伸ばし効果を得ることができる。
【0008】
また、前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を身長方向へ移動させるよう制御することが好ましい。
このような構成とすることにより、マッサージ機構を膝側から足先側へ向かって移動させた場合には、脚部を挟持した施療子が脹脛をその長手方向へ引き伸ばすので、脚伸ばし効果を得ることができる。一方、マッサージ機構を足先側から膝側へ向かって移動させた場合には、脚部を挟持した施療子が脹脛に対してその長手方向膝側へ移動するので、膝を曲げる脚部の屈曲運動を行わせることができる。
【0009】
また、前記マッサージ機構は、前記駆動手段によって、対をなす前記内側施療子間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、対をなす前記内側施療子により被施療者の首部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御することが好ましい。
このような構成とすることにより、首部を挟持した施療子が頭部を前傾又は後傾させるので、首筋伸ばし効果を得ることができる。
【0010】
また、前記制御部は、前記マッサージ機構を所定量進出させた状態で身長方向へ移動させ、前記マッサージ機構が首部に位置した際に、対をなす前記内側施療子により被施療者の首部を挟んだ状態で前記マッサージ機構を所定量後退させるよう制御することが好ましい。
このような構成とすることにより、首部がその長手方向へ引き伸ばされながら頭部が後傾されるので、より大きな首筋伸ばし効果を得ることができる。
【0011】
また、前記マッサージ機構は、前記内側施療子が上下で対をなして構成され、前記駆動手段によって、対をなす前記内側施療子間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、対をなす上側の前記内側施療子の離隔距離を下側のそれよりも小さく設定して前記マッサージ機構を前記背凭れ部において身長方向頭部側へ移動させ、対をなす下側の前記内側施療子の離隔距離を上側のそれよりも小さく設定して前記マッサージ機構を前記背凭れ部において身長方向腰部側へ移動させるよう制御することが好ましい。
このような構成とすることにより、左右対をなす内側施療子の離隔距離ついて、マッサージ機構の進行方向側を小さく設定しているので、十分な開胸ストレッチ効果を得ることができる。
【0012】
また、前記マッサージ機構は、左右の前記内側施療子及び前記外側施療子を夫々支持すると共に、前記駆動手段により軸芯回りに回転する第1支持シャフトを有し、該第1支持シャフトは、アームを介して前記内側施療子を支持する内側傾斜軸と、アームを介して前記外側施療子を支持する外側傾斜軸とを有し、前記内側傾斜軸及び前記外側傾斜軸は、前記軸芯に対して互いに異なる角度を有し、且つ対をなす前記内側傾斜軸は、前記軸芯に対して互いに異なる角度を有していることが好ましい。
このような構成とすることにより、マッサージ機構が背凭れ部に位置しているときには、対の内側施療子により背中の左右中心である背筋に対しても揉みマッサージを行うことができる。また、マッサージ機構が単一であっても、被施療者の上半身から下半身まで広範囲にマッサージを行うことができる。
【0013】
本発明2は、被施療者の脚部を支持するフットレストと、前記フットレストに脚部の長手方向に移動自在に設けられたマッサージ機構と、前記マッサージ機構の動作を制御する制御部と、を有し、前記マッサージ機構は、左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御することを特徴とする。
このような構成とすることにより、特にマッサージ機構を前方へ揺動させた場合には、脚部を挟持した施療子が、膝を略上方に持ち上げて膝の曲げ量を大きくした状態で脹脛を略下方へ引き下げるので、十分な脚伸ばし効果を得ることができる。
【0014】
本発明3は、少なくとも被施療者が着座する座部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、前記椅子本体内に設けられ、前記座部から前記フットレストまでの間を移動自在に構成されたマッサージ機構と、前記マッサージ機構の動作を制御する制御部と、を有し、前記マッサージ機構は、左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、前記制御部は、対をなす前記内側施療子及び前記外側施療子の離隔距離を、両施療子が被施療者の脚部の背面に当接可能なる幅分に維持した状態で、前記マッサージ機構を前記座部から前記フットレストにかけて移動させるよう制御することを特徴とする。
このような構成とすることにより、膝を伸ばして大腿部背面の筋肉を伸長させるので、十分な脚伸ばし効果を得ることができる。
【発明の効果】
【0015】
本発明1によれば、被施療者の上半身における左半身と右半身の夫々に対応した揉みマッサージ等が可能であり、且つ被施療者の左脚と右脚の夫々を挟むことが可能なマッサージ機構を利用して、被施療者の被施療部に対してストレッチ運動を行うことができる。また、本発明2及び本発明3によれば、十分な脚伸ばし効果を得ることができる。
【図面の簡単な説明】
【0016】
【図1】前位置状態にあるマッサージ機の斜視図である。
【図2】身体支持部を分離した前位置状態にあるマッサージ機の斜視図である。
【図3】前位置状態にあるマッサージ機の側面図である。
【図4】後位置状態にあるマッサージ機の側面図である。
【図5】マッサージ機の構成を示すブロック図である。
【図6】マッサージ機構を前方斜め上方から見たときの外観斜視図である。
【図7】マッサージ機構を後方斜め上方から見たときの外観斜視図である。
【図8】マッサージ機構を上方から見たときの平面図である。
【図9】マッサージ機構の一部の構成について分解して示す分解斜視図である。
【図10】進退ユニット及び体圧センサを前方斜め上方から見たときの外観斜視図である。
【図11】進退ユニットを下方から見たときの底面図である。
【図12】体圧センサの構成について分解して示す分解斜視図である。
【図13】第1支持シャフトについて一部を分解して示す斜視図である。
【図14】第2支持シャフトについて一部を分解して示す斜視図である。
【図15】第1支持シャフト及び第2支持シャフトの一部を拡大して示す平面図であり、(a)は第1支持シャフトを、(b)は第2支持シャフトを夫々示している。
【図16】第1支持シャフトを回転させたときの内側施療子と外側施療子との動作を説明するための平面図であり、(a)は内側施療子と外側施療子とが互いに接近した状態、(b)は内側施療子と外側施療子とが互いに離反した状態を夫々示している。
【図17】脚部に対する施療子の動作説明図であり、(a)は椅子本体の足先側から見た模式図であり、(b)は椅子本体の左側から見た模式図である。
【図18】他の構成のマッサージ機構を前方斜め上方から見たときの外観斜視図であり、可動フレームが最も後退した状態を示している。
【図19】他の構成のマッサージ機構を前方斜め上方から見たときの外観斜視図であり、可動フレームが最も進出した状態を示している。
【図20】他の構成のマッサージ機構に係る進退ユニット及び体圧センサの構成について分解して示す分解斜視図である。
【図21】脚フレームと本体フレームの位置関係を示す平面模式図であり、(a)は椅子本体が前位置又は第1所定位置に位置している状態であり、(b)は椅子本体が後位置又は第1所定位置に位置している状態を夫々示している
【図22】幅センサの構成を示す模式図である。
【図23】各施療子の近接状態を説明する説明図であり、(a)は第1近接状態を、(b)は第2近接状態を、(c)は幅広状態を夫々示している。
【図24】ストレッチ動作(その1)の動作説明図であり、(a)はマッサージ機構が後退した状態、(b)はマッサージ機構が進出した状態を夫々示している。
【図25】ストレッチ動作(その2)の動作説明図であり、(a)はマッサージ機構が脹脛に位置した状態、(b)はマッサージ機構が足首に位置した状態を夫々示している。
【図26】ストレッチ動作(その3)の動作説明図であり、(a)はマッサージ機構が首部に位置した状態を背中側から見た模式図、(b)は(a)を側面から見た模式図でありマッサージ機構が後退した状態、(c)は(a)を側面から見た模式図でありマッサージ機構が進出した状態を夫々示している。
【図27】ストレッチ動作(その4)の動作説明図であり、(a)はマッサージ機構が肩部に位置した状態を背中側から見た模式図、(b)は(a)を側面から見た模式図、(c)はマッサージ機構が首部に位置した状態を背中側から見た模式図、(d)は(c)を側面から見た模式図である。
【図28】ストレッチ動作(その5)の動作説明図であり、(a)は第1近接状態のマッサージ機構が腰部に位置した状態を背中側から見た模式図、(b)は第2近接状態のマッサージ機構が首部に位置した状態を背中側から見た模式図である。
【図29】ストレッチ動作(その6)の動作説明図であり、(a)はマッサージ機構が臀部に位置した状態を足先側から見た模式図、(b)は(a)を側面から見た模式図、(c)はマッサージ機構が脚部に位置した状態を足先側から見た模式図、(d)は(c)を側面から見た模式図である。
【発明を実施するための形態】
【0017】
[全体構成]
以下、本発明のマッサージ機1の全体構成について説明する。図1は前位置状態にあるマッサージ機1の斜視図であり、図2は身体支持部8を分離した前位置状態にあるマッサージ機1の斜視図であり、図3は前位置状態にあるマッサージ機1の側面図であり、図4は後位置状態にあるマッサージ機1の側面図である。なお、図2〜図4においては、視認性を考慮して後述するエアセル13を省略して図示している。
【0018】
図1〜図4に示すとおり、本発明のマッサージ機1は、主として、被施療者が着座する座部3と、座部3の後部に一体的に設けられた被施療者が凭れる背凭れ部4と、座部3の前部に上下揺動自在に設けられた被施療者の脚部を支持するフットレスト5と、で構成される椅子本体2と、この椅子本体2を前後に揺動自在に支持する脚フレーム6と、を有している。そして、この椅子本体2は、背凭れ部4から座部3を経由してフットレスト5までの間を移動自在に構成され、被施療者の被施療部をマッサージするマッサージ機構9と、座部3、背凭れ部4、及びフットレスト5の夫々に配設されたエアセル13を有している。このマッサージ機構9は、被施療者の身長方向に移動することにより、被施療者の首部から足先までをマッサージ可能である。なお、以下の説明で用いる方向の概念は、前位置状態におけるマッサージ機1の座部3に着座した被施療者から見たときの方向の概念と一致するものとし、その他の場合は適宜説明するものとする。
【0019】
[椅子本体の構成]
椅子本体2の構成について詳述すると、左右両端部に対のガイドレール7aを備えた本体フレーム7と、本体フレーム7に設けられ被施療者の身体を支持する身体支持部8と、を有している。このガイドレール7aは、被施療者の身長方向に沿って延設されており、マッサージ機構9の移動をガイドするよう構成されている。すなわち、対のガイドレール7a,7a間において、マッサージ機構9が移動するための開口部24が形成されている(図2参照)。そして、図3及び図4に示すように、背凭れ部4と座部3のガイドレール7aは、それぞれの境界部近傍に形成された湾曲部7bを介して連続して構成されており、フットレスト5と座部3のガイドレール7aは、それぞれの境界部近傍に設けられた回動軸C1を介して連結して構成されている。すなわち、フットレスト5のガイドレール7aは、座部3のガイドレール7aに対して回動軸C1回りに所定の範囲内で上下揺動自在である。そして、フットレスト5のガイドレール7aと座部3のガイドレール7aの境界部近傍にも湾曲部7cが形成されている。背凭れ部4のガイドレール7aと座部3のガイドレール7aの境界部近傍、及びフットレスト5のガイドレール7aと座部3のガイドレール7aの境界部近傍はそれぞれ湾曲部7b,7cを有しているため、マッサージ機構9は背凭れ部4から座部3を経由してフットレスト5までの間を円滑に移動することができる。なお、フットレスト5と座部3のガイドレール7aも背凭れ部4と座部3のガイドレール7aと同様に、湾曲部7cを介して連続して構成されていてもよい。
【0020】
本体フレーム7の構成について詳述すると、左右対のガイドレール(座部3のガイドレール)7a,7aと、脚フレーム6に回動軸C2を介してガイドレール7aを回動自在に支持する左右対の支持部材7dと、両支持部材7d,7dを連結する左右方向に延設された連結部材7eと、支持部材7dとフットレスト5のガイドレール7aを連結し、本体フレーム7の前後揺動に連動してフットレスト5のみを座部3に対して上下揺動させるリンク部材7fと、ガイドレール7aに対して身体の厚み方向に所定距離Dを存して身体支持部8を支持する支持部材7g(図2、図3、及び図4参照。図2においては視認性を考慮して二点鎖線で示している。)と、により構成されている。また、本体フレーム7と脚フレーム6の間には、本体フレーム7を脚フレーム6に対して回動軸C2回りに前後揺動させる揺動駆動部10が介在している。揺動駆動部10はモータ10a駆動によりロッド10bが伸縮するアクチュエータにより構成されており、このロッド10bの前端部が脚フレーム6に取り付けられ、後端部が本体フレーム7の連結部材7eに取り付けられている。
【0021】
このロッド10bが伸長すると、図4に示す後位置状態から、椅子本体2が全体として脚フレーム6に対して回動軸C2回りに前方へ揺動するとともに、フットレスト5が座部3に対して回動軸C1回りに下方へ揺動して、図3に示す前位置状態となる。一方、このロッド10bが収縮すると、図3に示す前位置状態から、椅子本体2が全体として脚フレーム6に対して回動軸C2回りに後方へ揺動するとともに、フットレスト5が座部3に対して回動軸C1回りに上方へ揺動して、図4に示す後位置状態となる。なお、ロッド10bの伸長量を制御することにより、椅子本体2を前位置状態から後位置状態までの間の任意の前後位置で停止させることができる。また、ロッド10bの伸縮を繰り返し行うことにより、椅子本体2をいわゆるロッキング動作させることができる。
【0022】
図3及び図4に示すとおり、座部3は、前方へ向かうにつれて前上がり傾斜状に構成されており、フットレスト5は前方(足先側)へ向かうにつれて前下がり傾斜状に構成されている。すなわち、座部3とフットレスト5の境界部近傍は上に凸の湾曲部7cが形成されている。したがって、被施療者はマッサージ機1に着座する際、膝の背面をこの湾曲部7c付近(身体支持部8の後述する湾曲部8c)に容易に位置決めすることができる。
【0023】
図2に示すとおり、身体支持部8は、所定の張力をもって本体フレーム7に張設され可撓性を有する布地等よりなるカバー本体11、及びこのカバー本体11と同様に張設されたベルト部材12により構成され、被施療者の上半身から下半身までを支持するよう構成されている。また、図3及び図4に示すとおり、身体支持部8は、ガイドレール7aに対して身体の厚み方向に所定距離Dを存して本体フレーム7(支持部材7g)に張設されている。被施療者は、この身体支持部8を介してマッサージ機構9によりマッサージを受けることとなる。このベルト部材12は、第1ベルト部材12a、第2ベルト部材12b、及び第3ベルト部材12cを有しており、第1ベルト部材12aは、カバー本体11に縫い込まれて一体的に形成され、身長方向に沿って背凭れ部4からフットレスト5にかけて張設されており、第2ベルト部材12bは、カバー本体11の前方(被施療者側)に位置してカバー本体11とは別体として設けられ、左右方向に沿って背凭れ部4における腰位置及び座部3に張設されており、第3ベルト部材12cは、カバー本体11に縫い込まれて一体的に形成され、座部3とフットレスト5の境界部近傍(湾曲部7c)に張設されている。そして、カバー本体11及び各ベルト部材12a〜12cの撓み度合いは、カバー本体11>第1ベルト部材12a>第2ベルト部材12b>第3ベルト部材12cとなるよう設定されている。
【0024】
この身体支持部8において、ベルト部材12が張設されている第1支持部分は、ベルト部材12が張設されていない第2支持部分(カバー本体11のみで構成されている箇所)に比べて撓み度合いが小さく、被施療者がマッサージ機1に着座したとき、下方(マッサージ機構9が有する施療子60及びアーム68,69が動作する動作領域S)への落ち込みが少なくなるようになっている。この移動領域Sを具体的に説明すると、施療子60及びアーム68,69の左右方向における動作可能範囲、身体の厚み方向における動作可能範囲、及び身長方向における動作可能範囲で囲まれる三次元的な空間である(図17も参照)。また、マッサージ機構9が有する施療子60は、左右方向においては第2支持部分に位置している。具体的には、対を成す内側施療子61a,62aは、前方から見て左右中央の第1ベルト部材12aと左右外側の第1ベルト部材12aの間に夫々位置しており、対を成す外側施療子61b,62bは、前方から見て左右外側のベルト部材12aの左右外側に夫々位置している。なお、第1ベルト部材12aは、左右中央1本のみで構成してもよい。
【0025】
身体支持部8を前述した構成とすることにより、被施療者の身体を第1支持部分において安定して支持することができると共に、第2支持部分においては被施療者の身体が動作領域Sに十分落ち込むのでマッサージ機構9による十分なマッサージを受けることができる。特に、身体支持部8における座部3とフットレスト5の境界部近傍に形成された湾曲部8cにおいて、その撓み度合いが他の箇所よりも小さく設定されている(第3ベルト部材12cを有する第1支持部分で構成されている)ため、膝の動作領域Sへの落ち込み量を少なくして、膝の側部を避けてマッサージすることができる。なお、膝の側部へのマッサージは痛みを伴うため好ましくない。この身体支持部8は、座部3とフットレスト5の境界部近傍の湾曲部8cに設けられた第3ベルト部材12cに代えて、剛性を有するブロー成形等よりなる硬質部材(例えば合成樹脂等)としてもよい。また、第2支持部材12bは、カバー本体11の前方(被施療者側)に位置してカバー本体11とは別体として構成され、且つカバー本体11及び第1ベルト部材12aよりも撓み度合いが小さく設定されているため、腰及び臀部をカバー本体11よりも前方(被施療者側)で安定して支持することができると共に、身体支持部8の後方に設けられたマッサージ機構9が動作(身長方向への移動、揉み動作、叩き動作等)することによって、施療子60が第2ベルト部材12bに引っ掛かってしまうことを防止できる。更に、椅子本体2が前位置状態にあるときは、被施療者の体重は座部3に最も作用し、椅子本体2が後位置状態にあるときは、被施療者の体重は背凭れ部4(特に腰位置)に最も作用するが、いずれの状態においても第2ベルト部材12bによって身体を安定して支持することができる。
【0026】
図1に示すとおり、椅子本体2の各所(本実施形態では、背凭れ部4、座部3、及びフットレスト5)には、エアの給排気により膨張収縮して、対応する被施療部をマッサージする左右で対を成すエアセル13が設けられている。背凭れ部4に設けられたエアセル13aは被施療者の背中を後方から押圧し、座部3に設けられたエアセル13bは下方から膨張し被施療者の臀部及び大腿部を略左右方向から挟むように押圧し、フットレスト5に設けられたエアセル13cは後方から膨張し被施療者の脚部を略前方から押圧するよう構成されている。なお、本実施の形態では、エアセル13は身体支持部8に設けられているが、本体フレーム7(支持部7g)に設けられていてもよい。
【0027】
図5は、マッサージ機1の構成を示すブロック図である。図5に示すように、上述した各エアセル13a〜13cは、可撓性中空のエアチューブを介してポンプ及びバルブ等から成る給排気装置51に接続されている。この給排気装置51は座部3の下方に収容されており、同じく座部3の下方に収容された制御部50からの指示に従って駆動し、各エアセル13a〜13cへの給排気を互いに独立して行うことができるようになっている。そして、制御部50からの指示により給排気装置51が駆動し、エアセル13a〜13cが膨縮することにより、被施療者の全身のいたるところを押圧施療可能である。
【0028】
また、給排気装置51は制御部50からの指示に従って予め設定されたプログラムにより動作する他、制御部50に接続されたリモートコントローラ55を被施療者が操作することにより制御部50へ入力された信号に基づいても動作することができる。なお、以下に説明するマッサージ機構9、揺動駆動部10の動作についても同様に、制御部50からの指示に従って予め設定されたプログラムにより動作する他、リモートコントローラ55を被施療者が操作することにより制御部50へ入力された信号に基づいても動作することができる。
【0029】
また、制御部50はメモリ(図示せず)を有しており、このメモリには予め定められたコースに従ってマッサージ機構9やエアセル13a〜13cによって被施療部に対してマッサージを行う複数のマッサージプログラムが格納されている。そして、リモートコントローラ55は、電源釦55a、各マッサージプログラムに対応する複数のコース釦55b〜55eを有しており、コース釦55b〜55eを操作することにより対応するマッサージプログラムが実行されるようになっている。
【0030】
[マッサージ機構の構成]
以下、椅子本体2に設けられたマッサージ機構9の構成について説明する。図6は、マッサージ機構9を前方斜め上方から見たときの外観斜視図であり、図7は、後方斜め上方から見たときの外観斜視図であり、図8は、上方から見たときの平面図である。図9は、マッサージ機構9の一部の構成について分解して示す分解斜視図である。図10は、進退ユニット29及び体圧センサ30を前方斜め上方から見たときの外観斜視図であり、図11は、進退ユニット29を下方から見たときの底面図である。図12は、体圧センサ30の構成について分解して示す分解斜視図である。なお、図6〜図8においては、後述する可動フレーム28が最も後退した状態を図示しており、図10及び図11においては、後述する可動ユニット34が最も後退した状態を図示している。なお、以下、マッサージ機構9の説明で用いる方向の概念は、座部3に着座した被施療者から見て、幅方向を左右方向とし左手側が「左」、右手側が「右」とし、身長方向を上下方向とし頭側が「上」、腰側が「下」とし、身体の厚み方向を前後方向とし被施療部に近づく方向が「前」、被施療部から遠ざかる方向が「後」として規定し、その他の場合は適宜説明するものとする。
【0031】
マッサージ機構9は、上下左右に配された12個の施療子60を有しており(図2も参照)、詳しくは後述するが、この施療子60は駆動手段を成すモータ(揉みモータ80,叩きモータ81)の駆動によって三次元的に動作し、被施療者の上半身から下半身にかけてその背面又は側面に対して揉み、叩き、及び指圧などの様々の押圧施療を施すことが可能になっている。また、マッサージ機構9は、左右で対をなす背面施療子25を有しており、前述したモータ(具体的には叩きモータ81)の駆動によって軸芯回りに回転動作し、被施療者の上半身から下半身にかけてその背面に対してさすり施療を施すことが可能となっている。また、このような施療子60を有するマッサージ機構9は、ガイドレール7aが有するラック(図示せず)にマッサージ機構9が有するピニオン26が係合しており、昇降モータ14の駆動によりピニオン26が回転すると、椅子本体2内を身長方向へ移動可能になっている。したがって、マッサージ機構9を移動させることにより、被施療者の上半身から下半身にかけてその背面に対し、首部から脚部に至るまでローリングマッサージを施すことができる。また、マッサージ機構9は、マッサージ機構9を被施療者に対して前後方向に進退させる進退駆動部15を構成する進退モータ15cを有している。これら各モータ14,15c,80,81は、制御部50(図5参照)からの信号により出力軸の回転方向及び回転速度が制御される。更に、この制御部50は、昇降モータ14及び進退モータ15cの回転数をロータリエンコーダ等によりパルス化して、そのパルス数を検出することにより、マッサージ機構9の身長方向における位置(上下位置)、及び被施療者に対する突出量(前後位置)を把握できるよう構成されている。
【0032】
図6〜図8に示すとおり、マッサージ機構9は、ベースフレーム27と、ベースフレーム27に揺動自在に設けられた可動フレーム28と、可動フレーム28をベースフレーム27に対して前後方向に進退させる進退ユニット29と、進退ユニット29に設けられた被施療者の体圧を検出する体圧センサ30と、を有している。以下、各部材について詳述する。
【0033】
[ベースフレームの構成]
ベースフレーム27は、板状に形成された板面が左右方向を向く左右の側部フレーム27aと、両側部フレーム27a,27aの後部に位置し両側部フレーム27a,27aを連結する後部フレーム27bと、により構成されており、ベースフレーム27(側部フレーム27a)の下部には、昇降モータ14に連動連結された左右方向に延びる昇降シャフト31が回転可能に設けられている。昇降シャフト31の左右両端部には、ピニオン26及びガイドローラ32が設けられており、昇降モータ14を駆動させると、ピニオン26が昇降シャフト31と一体回転してベースフレーム27が身長方向に昇降する。なお、両側部フレーム27aの上部にもガイドローラ32が設けられている。
【0034】
[可動フレームの構成]
可動フレーム28は、板状に形成された板面が左右方向を向く左右の側部フレーム28aと、両側部フレーム28a,28aの後部に位置し両側部フレーム28a,28aを連結する後部フレーム28bと、左右方向略中央に位置し後述する進退ユニット29を連結する連結フレーム28cと、により構成されている。また、可動フレーム28(側部フレーム28b及び連結フレーム28c)は、昇降シャフト31に対して枢支されており、昇降シャフト31を支点にその上部が前後方向に揺動自在に構成されている。そして、前述した施療子60及び背面施療子25は可動フレーム28に設けられている。
【0035】
[進退ユニットの構成]
図10及び図11に示すとおり、進退ユニット29は、ベースフレーム27である後部フレーム27bに取り付けられたベースユニット33と、可動フレーム28である連結フレーム28cに取り付けられた可動ユニット34と、可動ユニット34をベースユニット33に対して直線的に進退させる進退駆動部15と、により構成されており、全体としてベースフレーム27に対して前後方向に揺動自在に取り付けられている。ベースユニット33は、その後部がブラケット27cを介して後部フレーム27bに枢支されており、その前部が軸芯C3回りに揺動自在に構成されている。また、ベースユニット33は、可動ユニット34の進退方向に沿って開口するスリット33aが設けられている。
【0036】
進退駆動部15は、ベースユニット33に取り付けられた前後方向に延びるネジ軸15aと、ネジ軸15aと螺合しネジ推力によって前後方向に直線的に移動するナット15bと、ネジ軸15aを回転させる進退モータ15cと、により構成されている。この進退モータ15cは、制御部50(図5参照)からの信号により出力軸の回転方向及び回転速度が制御され、可動ユニット34の移動方向を切り替えたり、可動ユニット34の位置決めを行ったりすることができる。また、制御部50は、昇降モータ14を駆動させてマッサージ機構9を身長方向に移動させる際、可動ユニット34を後退させるよう進退モータ15cを制御するよう構成されており、マッサージ機構9の移動をスムーズに行うことができる。
【0037】
可動ユニット34は、可動フレーム28である連結フレーム28cに取り付けられた第1部材35と、第1部材35を移動自在に支持すると共にナット15bにナットブラケット36aを介して連結された第2部材36と、第1部材35と第2部材36の間に設けられ第1部材35を前方(被施療部側)へ付勢する付勢部材としてのコイルバネ37と、により構成されている。より具体的には、第1部材35は、第1部材35を連結フレーム28cに接続するジョイントブラケット35aと、ジョイントブラケット35aの後部に取り付けられた左右で対をなすガイドピン35bと、ガイドピン35bに取り付けられると共にコイルバネ37に挿通されたバネピン35cと、バネピン35cの後端部に設けられ後述する被検出体38を支持する被検出体ブラケット35dと、により構成されている。
【0038】
第2部材36は、第2部材36をナット15bに接続するナットブラケット36aと、コイルバネ37の後端部が当接するバネ受け36bと、ナットブラケット36a及びバネ受け36bの上部に取り付けられ後述する検出体39を支持する検出体ブラケット36dと、により構成されている。ナットブラケット36aには前後方向に沿って開口する長穴36cが形成されており、この長孔36cに第1部材35が有するガイドピン35bが挿通されて、ガイドピン35b(第1部材35)が長穴36cの範囲内でナットブラケット36a(第2部材36)に対して移動可能である。コイルバネ37は、その前端部がバネピン35cの前部に形成された当接部35eに当接し、その後端部がバネ受け36bに当接しており、バネピン35cを介して第1部材35を前方(被施療部側)へ常時付勢するよう構成されている。
【0039】
このように進退ユニット29が全体としてベースフレーム27に対して揺動自在に設けられているため、可動ユニット34が直線的に前後移動しても、進退ユニット29と昇降シャフト31との距離を一定に保つことができ、進退ユニット29は、可動フレーム28をベースフレーム27に対して揺動させることが可能となる。従って、進退駆動部15として直線的な運動を生じさせる構成を採用しているので、進退駆動部15の構成を簡素化することができると共に、マッサージ機構9を揺動させて施療子60により被施療者の肩を上方からマッサージすることが可能となる。
【0040】
[体圧センサの構成]
図10〜図12に示すとおり、体圧センサ30は、第1部材35が有する被検出体ブラケット35dに設けられ第1部材35と共に移動する被検出体38と、第2部材36が有する検出体ブラケット36dに設けられ被検出体38の位置を検出する検出体39と、により構成されている。この体圧センサ30の構成を具体的に説明する。体圧センサ30は、ベースユニット33の下方に位置する可動ユニット34に設けられており、ベースユニット33に設けられたスリット33aから上方に突出して、スリット33aの範囲内で進退駆動部15の駆動による前後移動が可能に構成されている。そして、この検出体39は、発光部39aと、この発光部39aに対して上下方向に所定間隔を有して対向配置された受光部39bとを有しており、被検出体38は、発光部39aと受光部39bの間を前後にスライド移動自在であり、発光部39aからの光を透過させる複数の孔部38a〜38dを有した遮蔽板により構成されている。そして、発光部39aは複数の発光素子(図示せず)を有しており、受光部39bは前記発光素子と同数の受光素子(図示せず)を有している。このように構成された検出体39は、受光部39aが検出する孔部38a〜38dより透過する透過光の個数により、被検出体38の前後位置を検出するよう構成されている。本実施形態では、孔部38a〜38dは複数個(より具体的には4個)設けられており、被検出体38の前後位置を複数段階(より具体的には6段階)に検出可能である。
【0041】
制御部50は、体圧センサ30により検出した第1部材35の前後位置に応じて、進退モータ15cを駆動制御して、可動ユニット34の進退量を調整するよう構成されている。具体的には、被施療者の体圧により、コイルバネ37の付勢力に抗して第1部材35が第2部材36に対して後退して所定の前後位置となったことを体圧センサ30が検出すると、進退モータ15cを駆動制御して、可動ユニット34を所定量後退させるよう構成されている。この場合、第1部材35の前後におけるニュートラル位置を制御部50が有するメモリに記憶させておき、常時ニュートラル位置となるよう進退モータ15cを駆動制御する。あるいは、制御部50は、第1部材35が常時所定の前後位置(ニュートラル位置)となるよう進退モータ15cを駆動制御して、可動ユニット34の進退量を調整するよう構成されていてもよい。
【0042】
図6〜図9に示すように、マッサージ機構9は被施療者の上半身の左側(以下、「左半身」という)又は左脚に対応して、内側施療子61a及び外側施療子61bから成る左側施療子61と、上半身の右側(以下、「右半身」という)又は右脚に対応して、内側施療子62a及び外側施療子62bから成る右側施療子62とを備えている。このうち内側施療子61aは、上側の施療子60a,60eと下側の施療子60b,60fとを有し、これらの施療子60a,60bは略V字状のアーム68の上下の先端内側にて枢支されており、これらの施療子60e,60fは略V字状のアーム68の上下の先端外側にて固着されている。同様に、外側施療子61bは、上側の施療子60c,60gと下側の施療子60d,60hとを有し、これらの施療子60c,60dは略V字状を成すアーム69の上下の先端外側にて枢支されており、これらの施療子60g,60hは略V字状を成すアーム69の上下の先端内側にて固着されている。なお、右半身に対応する内側施療子62a及び外側施療子62bについては、左半身に対応する上記内側施療子61a及び外側施療子61bの各構成と同様になっているのでここでの説明は省略し、図面においては、対応する構成に同一の符号を付しておく。
【0043】
内側施療子61a及び外側施療子61bについて更に詳述すると、内側施療子61aは、アーム68の内側に設けられた第1内側施療子60a,60bと、アーム68の外側に設けられた第2内側施療子60e,60fよりなり、外側施療子61bは、アーム69の内側に設けられた第1外側施療子60g,60hと、アーム69の外側に設けられた第2外側施療子60c,60dよりなる。第1内側施療子60a,60bは、第2内側施療子60e,60fに比べて大寸法に構成され、特に、厚み寸法が大きくなるように構成されている。一方、第1外側施療子60g,60hは、第2外側施療子60c,60dに比べて小寸法に構成され、特に、厚み寸法が小さくなるように構成されている。
【0044】
図9に示すとおり、アーム68,69は、夫々の基部が、略V字状を成すコンロッド70,71が夫々有する一方の先端にて、左右方向に沿った枢軸回りを所定の角度範囲で回動可能なように支持されている。また、アーム68,69には左右方向の外側へ突出したピンp1が設けられ、コンロッド70,71にも左右方向の外側へ突出したピンp2が設けられている。そして、ピンp1,p2間には、所定のバネ係数を有するコイルバネsが掛けられている。従って、アーム68,69は、コイルバネsによって上側の施療子60a,60c,60e,60gが前方(被施療者側)へ向かうように付勢されている。なお、コイルバネsとして適宜バネ係数を変えて採用することにより、施療子60a,60c,60e,60gによる被施療者への付勢力を調整することができる。また、アーム68,69は、コイルバネsによって上側の施療子60a,60c,60e,60gと下側の施療子60b,60d,60f,60hの前方(被施療者側)への突出量が略均等である中立状態となるよう付勢されていてもよい。アーム68,69が中立状態となるようコイルバネsの位置及び付勢力を設定すれば、マッサージ機構9が肩付近に位置する際には主に上側の施療子が60a,60cが肩の略上方から当接することができ、膝付近(湾曲部7c付近)を通過する際には施療子60a〜60hが膝の背面に引っ掛かってしまうことを防止できる。
【0045】
各コンロッド70,71の基部には略左右方向に貫通するよう軸受孔70a,71aが形成されており、これらの軸受孔70a,71aには、左右方向へ軸芯を沿うように配設された第1支持シャフト72が挿通されている。また、各コンロッド70,71が夫々有する他方の先端には図示しない嵌合凹部が形成され、この嵌合凹部には連結棒73,74の各一端部が夫々挿入されており、嵌合凹部と連結棒73,74の一端部とはボールジョイント等の自在継手を形成している。連結棒73,74の各他端部は、略左右方向に貫通する軸受孔75a,76aを有する軸受部材75,76の夫々に接続され、これら軸受部材75,76が有する軸受孔75a,76aには、左右方向へ軸芯を沿うように配設された第2支持シャフト77が挿通されている。
【0046】
図8に示すように、マッサージ機構9にはギヤボックス78が備えられている。このギヤボックス78は、左右方向において左半身(左脚)用の内側施療子61aと右半身(右脚)用の内側施療子62aとの間に位置し、左右方向へ延びる第1支持シャフト72及び第2支持シャフト77の中央部分が夫々貫通している。ギヤボックス78の近傍には、昇降モータ14、進退モータ15c、揉みモータ80、及び叩きモータ81が配設されており、これら各モータは、制御部50(図5参照)からの信号により出力軸の回転方向及び回転速度が制御される。そして、このギヤボックス78は、前述した進退ユニット29を連結する連結フレーム28cを構成している。
【0047】
そして、揉みモータ80の回転出力は、ギヤボックス78内に備えられたウォーム(図示せず)と、第1支持シャフト72の左右方向の中央部に設けられて前記ウォームに噛合するヘリカルギヤ(図22参照)とを介し、第1支持シャフト72に伝達されるようになっている。従って、制御部50からの指示により揉みモータ80が駆動すると、第1支持シャフト72が軸芯72a(図7参照)回りに回転する。また、叩きモータ81の回転出力は、ギヤボックス78に備えられたプーリ及びベルト(図示せず)と、第2支持シャフト77の左右方向の中央部に設けられたプーリとを介し、第2支持シャフト77に伝達されるようになっている。従って、制御部50からの指示により叩きモータ81が駆動すると、第2支持シャフト77が軸芯77a(図7参照)回りに回転する。
【0048】
図13は、第1支持シャフト72について一部を分解して示す斜視図であり、図14は、第2支持シャフト77について一部を分解して示す斜視図である。また、図15は、第1支持シャフト72及び第2支持シャフト77の一部を拡大して示す平面図であり、(a)は第1支持シャフト72を、(b)は第2支持シャフト77を夫々示している。
【0049】
図13に示すように、第1支持シャフト72は、複数の部品が組み合わされて左右対称に構成されており、左右方向へ長寸の主軸83を備えている。この主軸83には、内側傾斜軸部材84及び外側傾斜軸部材85が挿通されており、これら傾斜軸部材84,85は、主軸83の長手方向における所定箇所に位置している。
【0050】
より詳しくは、主軸83において、左右方向中心側に近い部分には内側傾斜軸部材84が外嵌している。この内側傾斜軸部材84は、大径円柱状を成して内側のコンロッド70の嵌合孔70a(図9参照)が外嵌する傾斜軸部84aと、傾斜軸部84aの左右内側方から張り出した小径円柱状の取付部84bとを有し、傾斜軸部84a及び取付部84bを貫通して貫通孔84cが形成されている。図15(a)に示すように、傾斜軸部84aとツバ部84bとは互いの軸芯84dが略一致しており、貫通孔84cはこの軸芯84dに対して所定の角度A1(>0)だけ傾斜して設けられている。従って、内側傾斜軸部材84の貫通孔84cに主軸83が挿通されると、傾斜軸部84a及び取付部84bは、主軸83の軸芯72aに対して軸芯84dが角度A1だけ傾斜することとなる。
【0051】
また、内側傾斜軸部材84に対して左右方向の外方には、外側傾斜軸部材85が配設されている。この外側傾斜軸部材85は、上述した内側傾斜軸部材84と同様の構成を有しており、大径円柱状を成して外側のコンロッド71の嵌合孔71a(図9参照)が外嵌する傾斜軸部85aと、小径円柱状の取付部85bとを備え、これら傾斜軸部85a及び取付部85bを貫通して貫通孔85cが形成されている。図15(a)に示すように、傾斜軸部85aと取付部85bとは互いの軸芯85dが略一致しており、貫通孔85cはこの軸芯85dに対して所定の角度A2(>0)だけ傾斜して設けられている。従って、外側傾斜軸部材85の貫通孔85cに主軸83が挿通されると、傾斜軸部85a及び取付部85bは、主軸83の軸芯72aに対して軸芯85dが角度A2だけ傾斜することとなる。
【0052】
このようにして主軸83に挿通された内側傾斜軸部材84及び外側傾斜軸部材85は、夫々の取付部84b,85bに径方向へ貫通形成された孔84e,85eへ係止ピン88が圧入され、係止ピン88の先端が主軸83に貫通形成された孔83aに挿通されることにより、主軸83に対して固定される。
【0053】
ところで、図15(a)に示すように、内側傾斜軸部材84の軸芯84dと外側傾斜軸部材85の軸芯85dとは、互いに平行ではなく、第1支持シャフト72の軸芯72aに対して異なる角度を有して傾斜している。特に本実施の形態では、内側傾斜軸部材84と外側傾斜軸部材85とは、平面視したときに軸芯72aに対して互いに逆向きに傾斜して設けられており、また、内側傾斜軸部材84の軸芯84dと軸芯72aとの成す鋭角A1は、外側傾斜軸部材85の軸芯85dと軸芯72aとの成す鋭角A2に比べて若干大きく(A1>A2)設定されている。また、左右の内側傾斜軸部材84,84の軸芯84d,84dは、互いに平行ではなく、第1支持シャフト72の軸芯72aに対して異なる角度を有して傾斜し、左右の外側傾斜軸部材85,85の軸芯85d,85dは、互いに平行ではなく、第1支持シャフト72の軸芯72aに対して異なる角度を有して傾斜している。特に本実施の形態では、左右の内側傾斜軸部材84,84は、平面視したときに軸芯72aに対して互いに逆向きに傾斜して設けられており、左右の外側傾斜軸部材85,85は、平面視したときに軸芯72aに対して互いに逆向きに傾斜して設けられている(図9も合わせて参照)。
【0054】
図16は、第1支持シャフト72を回転させたときの内側施療子61a,62aと外側施療子61b,62bとの動作を説明するための平面図であり、(a)は内側施療子61a,62aと外側施療子61b,62bとが互いに接近した状態、(b)は内側施療子61a,62aと外側施療子61b,62bとが互いに離反した状態を夫々示している。図16(a),(b)に示すように、上述したような第1支持シャフト72が、揉みモータ80の駆動により軸芯72a回りに回動すると、コンロッド70及びアーム68を介して傾斜軸部84aに支持された内側施療子61a,62aと、コンロッド71及びアーム69を介して傾斜軸部85aに支持された外側施療子61b,62bとは、互いの左右方向の離隔距離が変更される。なお、図8中に示す符号Pは、マッサージ機構9が背凭れ部4に位置するときの各施療子60において被施療者の背中に接触する主な箇所を示している。
【0055】
また、揉みモータ80を適宜停止させることにより、図16(a)に示す接近状態と、図16(b)に示す離反状態との間で、内側施療子61a,62aと外側施療子61b,62bとを任意の離隔寸法で維持することが可能である。更に、マッサージ機構9を背凭れ部4に位置させて揉みモータ80を連続的に駆動することにより、内側施療子61a,62aと外側施療子61b,62bとを繰り返し接近及び離反させ、背凭れ部4に支持された左半身と右半身とを、独立して揉みマッサージすることができる。即ち、内側施療子61a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)及び外側施療子61b(第2外側施療子60c,60d)により、左半身を独立して左右から摘むように揉みマッサージすることができ、内側施療子62a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)及び外側施療子62b(第2外側施療子60c,60d)により、右半身を独立して左右から摘むように揉みマッサージすることができる。加えて、左右の内側施療子61a,62a(第1内側施療子60a,60b)に注目すると、第1支持シャフト72の回転により、互いに接近及び離反するため、被施療者の背骨を跨いで左右から摘むように揉みマッサージすることができる。更には、対の外側施療子61b,62b(第2外側施療子60c,60d)により、上半身の側面(例えば脇等)に対しても揉みマッサージすることができる。
【0056】
また、昇降モータ14を駆動してマッサージ機構9を座部3まで移動させて、揉みモータ80を連続的に駆動させれば、臀部や大腿部における左部分と右部分とを、上半身と同様に、独立して左右から摘むように揉みマッサージすることができる。また、昇降モータ14を駆動してマッサージ機構9をフットレスト5まで移動させて、揉みモータ80を連続的に駆動させれば、対を成す内側施療子61a及び外側施療子61bにより、左脚を独立して左右から挟むように揉みマッサージすることができ、対を成す内側施療子62a及び外側施療子62bにより、右脚を独立して左右から挟むように揉みマッサージすることができる。
【0057】
図17は、脚部に対する施療子60の動作説明図であり、(a)は椅子本体2の足先側から見た模式図であり、(b)は椅子本体2の左側から見た模式図である。
図17に示すように、被施療者の膝は、身体支持部8における撓み度合いの小さい座部3とフットレスト5の境界部近傍の湾曲部8c(第1支持部分)において支持されるため、二点鎖線で図示したマッサージ機構9の移動領域Sへの落ち込みが小さく、内側施療子61a,62a(第2内側施療子60e,60f)及び外側施療子61b,62b(第1外側施療子60g,60h)によって膝の背面を揉みマッサージすることができ、膝を除く脚部(ふくらはぎ等)は、身体支持部8における撓み度合いの大きい部分(第2支持部分)において支持されるため、一点鎖線で図示したマッサージ機構9の移動領域Sへ十分落ち込み、対を成す内側施療子61a(第2内側施療子60e,60f)及び外側施療子61b(第1外側施療子60g,60h)により、左ふくらはぎを独立して左右から挟むように揉みマッサージすることができ、対を成す内側施療子62a(第2内側施療子60e,60f)及び外側施療子62b(第1外側施療子60g,60h)により、右ふくらはぎを独立して左右から挟むように揉みマッサージすることができる。
【0058】
なお、本実施の形態では、既に説明したように図15(a)に示す角度A1,A2がA1>A2という関係に設定されており、第1支持シャフト72が回転したときの左右方向の動作範囲は、内側施療子61a,62aの方が外側施療子61b,62bよりも大きくなっている。これにより、外側施療子61b,62bが左右の外方へ移動したときに、椅子本体2内の本体フレーム7と干渉するのを防止しつつ、内側施療子61a,62aと外側施療子61b,62bとの相対距離の変更可能範囲を大きく確保している。また、内側施療子61a,62aの動作範囲を決定する角度A1は、コンロッド70とギヤボックス78との干渉を防止すること、及び外側施療子61b,62bとの接近時の距離などを考慮して決定される。また、上記のように設定された角度A1,A2は一例であり、周辺の構成や他の事情に応じて異なる関係の角度に設定することも可能であって、A1=A2に設定することもできる。
【0059】
一方、図14に示すように、第2支持シャフト77は、複数の部品が組み合わされて左右対称に構成されており、左右方向へ長寸の主軸90を備えている。この主軸90は、左右方向に軸芯が向けられた円柱部90aを有し、該円柱部90aの左右の端部からはシャフト部90bが左右の外方へ延設されている。シャフト部90bは断面が略矩形状を成し、周方向に存在する4つの角部分が面取りされている。また、左右の各シャフト部90bには、内側偏芯軸部材91及び外側偏芯軸部材92とエンド部材93とが挿通されており、これら偏芯軸部材91,92及びエンド部材93は、互いの間にスペーサ94が介在することによりシャフト部90bの長手方向における所定箇所に位置している。
【0060】
より詳しくは、シャフト部90bにおいて、円柱部90aに最も近い部分には内側偏芯軸部材91が外嵌している。この内側偏芯部材91は、小径円柱状を成して内側施療子61a,62aに対応して設けられた軸受部材75の軸受孔75a(図9参照)が外嵌する偏芯軸部91aと、該偏芯軸部91aの左右方向の内方端から拡径方向へ張り出した大径円柱状のツバ部91bとを有し、偏芯軸部91a及びツバ部91bを左右方向へ貫通する貫通孔91cが形成されている。ここで、貫通孔91cの軸芯は、偏芯軸部91aの軸芯91dから所定寸法だけ偏芯している。従って、図15(b)に示すように、内側偏芯軸部材91の貫通孔91cにシャフト部90bが挿通されると、偏芯軸部91aの軸芯91dは、第2支持シャフト77の軸芯77aに対して所定寸法D1だけ偏芯して位置することとなる。
【0061】
また、内側偏芯軸部材91に対して左右方向の外方には、スペーサ94を挟んで外側偏芯軸部材92が配設されている。この外側偏芯軸部材92は、上述した内側偏芯軸部材91と同様の構成を有しており、小径円柱状を成して外側施療子61b,62bに対応して設けられた軸受部材76の軸受孔76a(図9参照)が外嵌する偏芯軸部92aと、該偏芯軸部92aの左右方向の外方端から拡径方向へ張り出した大径円柱状のツバ部92bとを有し、偏芯軸部92a及びツバ部92bを左右方向へ貫通する貫通孔92cが形成されている。この貫通孔92cについても、その軸芯は、偏芯軸部92aの軸芯92dから所定寸法だけ偏芯している。従って、図15(b)に示すように、外側偏芯軸部材92の貫通孔92cにシャフト部90bが挿通されると、偏芯軸部92aの軸芯92dは、第2支持シャフト77の軸芯77aに対して所定寸法D2だけ偏芯して位置することとなる。
【0062】
また、外側偏芯軸部材92に対して左右方向の外方には、スペーサ94を挟んで円環状のエンド部材93が配設されている。更に、このようにしてシャフト部90bに挿通された内側偏芯軸部材91及び外側偏芯軸部材92は、夫々のツバ部91b,92bに径方向へ貫通形成された孔91e,92eへ係止ピン95が圧入され、係止ピン95の先端がシャフト部90bの周面に当接することにより、シャフト部90bに対して固定される。
【0063】
ところで、本実施の形態においては、図15(b)に示すように、内側偏芯軸部材91の軸芯91dと外側偏芯軸部材92の軸芯92dとは、第2支持シャフト77の軸芯77aを中心とする位相が互いに異なっており、より具体的には、180度の位相差を有するように構成されている。従って、第2支持シャフト77が、叩きモータ81の駆動により軸芯77a回りに回動すると、内側施療子61a,62aと外側施療子61b,62bとは、被施療者の身体の背面側への相対的な突出寸法が変更される。また、左右の内側偏芯軸部材91,91の軸芯91d,91dは、第2支持シャフト77の軸芯77aを中心とする位相が互いに異なっており、より具体的には、180度の位相差を有するように構成され、左右の外側偏芯軸部材92,92の軸芯92d,92dは、第2支持シャフト77の軸芯77aを中心とする位相が互いに異なっており、より具体的には、180度の位相差を有するように構成されている(図9も合わせて参照)。従って、第2支持シャフト77が、叩きモータ81の駆動により軸芯77a回りに回動すると、左右の内側施療子61a,62aは、被施療者の身体の背面側への相対的な突出寸法が夫々変更され、左右の外側施療子61b,62bは、被施療者の身体の背面側への相対的な突出寸法が夫々変更される。
【0064】
また、叩きモータ81を適宜停止させることにより、内側施療子61a,62aと外側施療子61b,62bとを、これらの進退動作可能範囲内の任意の位置で維持することが可能である。更に、マッサージ機構9を背凭れ部4に位置させて叩きモータ81を連続的に駆動することにより、内側施療子61a,62aと外側施療子61b,62bと繰り返し交互に進退動作させ、背凭れ部4に支持された左半身と右半身とを、独立して叩きマッサージすることができ、左右の内側施療子61a,62aを繰り返し交互に進退動作させ、背凭れ部4に支持された背中の左右中心である背筋を叩きマッサージすることができる。即ち、内側施療子61a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)及び外側施療子61b(第2外側施療子60c,60d)により、左半身に対してマッサージ師が実際に両手でするような叩きマッサージをすることができ、内側施療子62a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)及び外側施療子62b(第2外側施療子60c,60d)により、右半身に対して同様の叩きマッサージを左半身とは独立して行うことができる。更には、対の内側施療子61a,62a(第1内側施療子60a,60b及び/又は第2内側施療子60e,60f)により、背筋に対して叩きマッサージすることができ、対の外側施療子61b,62b(第2外側施療子60c,60d)により、上半身の側面(例えば脇等)に対しても叩きマッサージすることができる。
【0065】
また、昇降モータ14を駆動してマッサージ機構9を座部3まで移動させて、叩きモータ81を連続的に駆動させれば、臀部や大腿部における左部分と右部分とを、上半身と同様に、独立して叩きマッサージすることができると共に、臀部や大腿部における左右中央部分を叩きマッサージすることができる。また、昇降モータ14を駆動してマッサージ機構9をフットレスト5まで移動させて、叩きモータ81を連続的に駆動させれば、対を成す内側施療子61a及び外側施療子61bにより、左脚と右脚とを、上半身と同様に、独立して叩きマッサージすることができる。
【0066】
加えて、本実施の形態に係るマッサージ機構9は、揉みモータ80と叩きモータ81とを互いに独立して動作可能であるため、例えば、揉みモータ80の駆動により、内側施療子61a,62aと外側施療子61b,62bとの左右方向の離隔距離を被施療者の好みに設定しつつ、叩きモータ81の駆動により叩きマッサージを行うことも可能である。また、叩きモータ81の駆動により、内側施療子61a,62aと外側施療子61b,62bとの相対的な突出寸法を被施療者の好みに設定しつつ、揉みモータ80の駆動により揉みマッサージを行うことも可能である。これにより、被施療者に対する揉みマッサージ及び叩きマッサージの対象範囲が拡大すると共に、被施療者自身が身体を動かさずとも、内側施療子61a,62aと外側施療子61b,62bとを移動させて、所望の部位をマッサージすることができる。更には、揉みモータ80及び叩きモータ81を同時に駆動したり、駆動中の回転速度及び回転方向を変化させることにより、多様なマッサージ効果を得ることができる。
【0067】
更に、図6〜図9に示すように、マッサージ機構9は、対を成す内側施療子61a(62a)と外側施療子61b(62b)との間において左脚及び右脚の夫々の背面をマッサージする左右で対をなす背面施療子25を備えている。左脚に対応する背面施療子25は、左右方向へ軸芯を沿うよう配設された第3支持シャフト52が挿通されたローラ部材により構成され、第3支持シャフト52と一体回転可能に構成されている。この第3支持シャフト52は、第2支持シャフト77に設けられたプーリ77bと第3支持シャフト52に設けられたプーリ52bとがベルト(図示せず)で連結されて、第2支持シャフト77の回転に連動して回転可能に構成されている。従って、叩きモータ81の駆動によって、第2支持シャフト77と第3支持シャフト52は連動して回転する。背面施療子25は、対を成す内側施療子61aと外側施療子61bとの間であって両施療子61a,61bよりも後方に位置しており、マッサージ機構9をフットレスト5に位置させて、内側施療子61a及び外側施療子61bにより脚部を挟むように揉みマッサージできると共に、背面施療子25により脚部の背面をさするようにマッサージすることができる。なお、右脚に対応する背面施療子25については、左脚に対応する背面施療子25の各構成と同様になっているのでここでの説明は省略する。
【0068】
第3支持シャフト52を第2支持シャフト77に連動連結させているため、第3支持シャフト52を回転させる駆動源を別途設ける必要がなく、低コスト化することができる。しかも、第3支持シャフト52は、叩きモータ81に接続された第2支持シャフト77に連動連結されているため、揉みモータ80に接続された第1支持シャフト72に連動連結するよりも第3支持シャフト52の回転速度を速くすることができ、良好なさすりマッサージを実現できる。なお、第3支持シャフト52を独立して回転駆動させる駆動源(さすりモータ)を別途設けてもよい。
【0069】
[マッサージ機構の他の構成]
以下、マッサージ機構に適用できる他の構成について説明する。図18は、他の構成のマッサージ機構100を前方斜め上方から見たときの外観斜視図であり、可動フレーム28が最も後退した状態を示しており、図19は、他の構成のマッサージ機構100を前方斜め上方から見たときの外観斜視図であり、可動フレーム28が最も進出した状態を示しており、図20は、他の構成のマッサージ機構100に係る進退ユニット101及び体圧センサ102の構成について分解して示す分解斜視図である。なお、図18及び図19においては、右側施療子62の図示を省略している。そして、図18及び図19に示す実施形態のマッサージ機構100の構成について、前述した図6〜図9に示す実施形態のマッサージ機構9と異なる点は、進退ユニット101及び体圧センサ102の構成のみであり、その他の構成については同一符号を付してその説明を省略する。
【0070】
[進退ユニットの構成]
進退ユニット101は、ベースフレーム27である後部フレーム27bに取り付けられたベースユニット103と、可動フレーム28である連結フレーム28c(ギヤボックス78)に取り付けられた可動ユニット104と、可動ユニット104をベースユニット103に対して直線的に進退させる進退駆動部15(図20も参照)と、により構成されており、全体としてベースフレーム27に対して前後に揺動自在に取り付けられている。ベースユニット103は、その後部がブラケット27cを介して後部フレーム27bに枢支されており、その前部が軸芯C3回りに揺動自在に構成されている。
【0071】
進退駆動部15は、ベースユニット103に取り付けられた前後方向に延びるネジ軸15aと、ネジ軸15aと螺合しネジ推力によって前後方向に直線的に移動するナット15bと、ネジ軸15aを回転させる進退モータ15cと、により構成されている。この進退モータ15cは、制御部50(図5参照)からの信号により出力軸の回転方向及び回転速度が制御され、可動ユニット104の移動方向を切り替えたり、可動ユニット104の位置決めを行ったりすることができる。また、制御部50は、昇降モータ14を駆動させてマッサージ機構100を身長方向に移動させる際、可動ユニット104を後退させるよう進退モータ15cを制御するよう構成されており、マッサージ機構100の移動をスムーズに行うことができる。
【0072】
図20に示すように、可動ユニット104は、可動フレーム28である連結フレーム28c(ギヤボックス78)に取り付けられた第1部材105と、第1部材105を移動自在に支持すると共にナット15bにナット取付部106aを介して連結された第2部材106と、第1部材105と第2部材106の間に設けられ第1部材105を前方(被施療部側)へ付勢する付勢部材としてのバネ107と、により構成されている。第1部材105は、第1部材105を連結フレーム28cに接続するジョイント部105aと、第1部材105の内部に形成されたバネ107の前端部が当接する当接部105bと、第1部材105の内部に形成され後述する被検出体108を支持する被検出体取付部105cと、により構成されている。そして、第1部材105は、左右で対をなす左側の第1部材105L及び右側の第1部材105Rを有し、第2部材106は、左右で対をなす左側の第2部材106L及び右側の第2部材106Rを有し、ナット15b及びバネ107を外側方から挟み込むように対の第2部材106L,106Rを夫々連結し、更に第2部材106を外側方から挟み込むように対の第1部材105L,105Rを夫々連結して可動ユニット104が構成されている。
【0073】
第2部材106は、第2部材106をナット15bに接続するナット取付部106aと、第2部材106の内部に形成されたバネ107の後端部が当接するバネ受け106bと、検出体109を支持する検出体取付部106cと、により構成されている。付勢部材としてのバネ107は、その前端部が第1部材105が有する当接部105bに当接し、その後端部が第2部材106が有するバネ受け106bに当接しており、第1部材105を前方(被施療者側)へ常時付勢するよう構成されている。
【0074】
このように進退ユニット101が全体としてベースフレーム27に対して揺動自在に設けられているため、可動ユニット104が直線的に前後移動しても、進退ユニット101と昇降シャフト31との距離を一定に保つことができ、進退ユニット101は、可動フレーム28をベースフレーム27に対して図18に示す状態から図19に示す状態の間で矢視aの方向に揺動させることが可能となる。従って、進退駆動部15として直線的な運動を生じさせる構成を採用しているので、進退駆動部15の構成を簡素化することができると共に、マッサージ機構100を揺動させて施療子60により被施療者の肩を上方からマッサージすることが可能となる。
【0075】
図20に示すように、体圧センサ102は、第1部材105に設けられ第1部材105と共に移動する被検出体108と、第2部材106に設けられ被検出体108の位置を検出する検出体109と、により構成されている。この体圧センサ102の構成を具体的に説明する。体圧センサ102は、ベースユニット103の前方に位置する可動ユニット104に設けられている。そして、この検出体109は、発光部109aと、この発光部109aに対して左右方向に所定間隔を有して対向配置された受光部109bとを有しており、被検出体108は、発光部109aと受光部109bの間を前後にスライド移動自在であり、発光部109aからの光を透過させる複数の孔部108a〜108dを有した遮蔽板により構成されている。そして、発光部109aは複数の発光素子(図示せず)を有しており、受光部109bは前記発光素子と同数の受光素子(図示せず)を有している。このように構成された検出体109は、受光部109aが検出する孔部108a〜108dより透過する透過光の個数により、被検出体108の前後位置を検出するよう構成されている。本実施形態では、孔部108a〜108dは複数個(より具体的には4個)設けられており、被検出体の前後位置を複数段階(より具体的には6段階)に検出可能である。
【0076】
制御部50は、体圧センサ102により検出した第1部材105の前後位置に応じて、進退モータ15cを駆動制御して、可動ユニット104の進退量を調整するよう構成されている。具体的には、被施療者の体圧により、バネ107の付勢力に抗して第1部材105が第2部材106に対して後退して所定の前後位置となったことを体圧センサ102が検出すると、進退モータ15cを駆動制御して、可動ユニット104を所定量後退させるよう構成されている。この場合、第1部材105の前後におけるニュートラル位置を制御部50が有するメモリに記憶させておき、常時ニュートラル位置となるよう進退モータ15cを駆動制御する。あるいは、制御部50は、第1部材105が常時所定の前後位置(ニュートラル位置)となるよう進退モータ15cを駆動制御して、可動ユニット104の進退量を調整するよう構成されていてもよい。
【0077】
[ロッキング動作に係る構成]
以下、マッサージ機1のロッキング動作について、図1〜図5、及び図21に基づいて具体的に説明する。図21は、脚フレーム6と本体フレーム7の位置関係を示す平面模式図であり、(a)は椅子本体2が前位置又は第1所定位置に位置している状態であり、(b)は椅子本体2が後位置又は第1所定位置に位置している状態を夫々示している。
【0078】
本発明のマッサージ機1は、被施療者が着座する座部3と、被施療者が凭れる背凭れ部4と、で構成される椅子本体2と、椅子本体2を前後に揺動可能に支持する脚フレーム6と、椅子本体2を前後に揺動させる揺動駆動部10と、椅子本体2を前後に往復揺動させる中で、前後の軌道端部の手前で揺動速度を減速させるよう制御する制御部50と、を有している。
このような構成とすることにより、椅子本体2の揺動方向の切り替えを滑らかに行うことができ、被施療者に快適な揺れを与えることができる。
【0079】
また、椅子本体2の前記軌道端部における位置を検出する第1センサ20と、椅子本体2の前記軌道端部手前における第1所定位置を検出する第2センサ21と、を有し、第2センサ21が前記第1所定位置を検出すると、制御部50は椅子本体2の揺動速度を減速させるよう制御する。
このような構成とすることにより、椅子本体2の軌道端部手前の第1所定位置を的確に検出して、椅子本体2の揺動を減速させる時間を確保することができる。
【0080】
また、揺動駆動部10は、モータ10aと、モータ10aの駆動により伸縮するロッド10bと、により構成され、第1センサ20は、ロッド10bの伸縮ストロークエンドを検出するよう構成され、第1センサ20がロッド10bの伸縮ストロークエンドを検出すると、制御部50は椅子本体2の揺動方向を反転させるべくモータ10aの回転方向を切り替えるよう制御する。
このような構成とすることにより、揺動駆動部10を簡単な構成とした場合であっても、椅子本体2の揺動方向の切り替えを滑らかに行うことができる。
【0081】
また、前記第2センサ21は、前後の第1所定位置の間に位置する第2所定位置を検出するよう構成されている。
このような構成とすることにより、椅子本体2の軌道端部の間における第2所定位置を検出することができ、椅子本体2を往復揺動させる範囲を変更することができる。例えば、往復揺動させる範囲を前後の軌道端部間、軌道前端部と第2所定位置の間、又は軌道後端部と第2所定位置の間と様々に設定することができる。
【0082】
図21に示すとおり、前述した揺動駆動部10は、モータ10aと、モータ10aの駆動により伸縮するロッド10bとにより構成されている。このモータ10aは、制御部50に電気的に接続されており、制御部50からの指示に従って予め設定されたプログラムにより動作する他、制御部50に接続されたリモートコントローラ55を被施療者が操作することにより制御部50へ入力された信号に基づいても動作することができる(図5参照)。そして、モータ10aの回転速度及び回転方向は、制御部50からの指示に従って適宜設定される。モータ10aの回転速度に椅子本体2の揺動速度が対応しており、モータ10aの回転方向に椅子本体2の揺動方向が対応している。そして、ロッド10bは、自身の伸縮ストロークエンドを検出する第1センサ20を有しており、最も伸長した状態(図3に示す前位置状態)と、最も収縮した状態(図4に示す後位置状態)を検出できるよう構成されている。この第1センサ20は制御部50に電気的に接続されている。
【0083】
また、図21に示すとおり、本発明のマッサージ機1には、脚フレーム6に対する椅子本体2の所定の前後位置を検出する第2センサ21が設けられている。この第2センサ21は非接触式センサであり、本体フレーム7の連結部材7eに設けられた磁性体等よりなる被検出体22と、脚フレーム6に設けられたホールIC等よりなる検出体23と、により構成されている。この検出体23は、前後方向に複数(本実施形態では3つ)設けられており、椅子本体2の軌道端部手前(軌道端部近傍)に位置する第1所定位置を検出する検出体23a,23aと、前後の第1所定位置の間に位置する第2所定位置を検出する検出体23bと、を有している。この第2センサ21は制御部50に電気的に接続されている。なお、図3、図4、及び図21から理解できるとおり、椅子本体2が前位置状態に近づく程、連結部材7eは後方に位置することとなり、椅子本体2が後位置状態に近づく程、連結部材7eは前方に位置することとなる。
【0084】
本実施形態では、第1所定位置は、椅子本体2が図3及び図4に示す前位置状態及び後位置状態となる手前の位置であり、第2所定位置は、前位置状態と後位置状態との略中間位置である。図21(a)に示すとおり、第1センサ20が前位置にある本体フレーム7(実線で図示)を検出することができ、第2センサ21が第1所定位置にある本体フレーム7(二点鎖線で図示)を検出することができる。また、図21(b)に示すとおり、第1センサ20が後位置にある本体フレーム7(実線で図示)を検出することができ、第2センサ21が第1所定位置にある本体フレーム7(二点鎖線で図示)を検出することができる。
【0085】
制御部50は、椅子本体2を脚フレーム6に対して前後に往復揺動させる中で、検出体23aが被検出体22の通過を検出すると、モータ10aの回転速度を減速させるよう制御する。そして、制御部50は、第1センサ20によって椅子本体2が軌道端部(前位置状態又は後位置状態)に到達したことを検出すると、モータ10aの回転方向を反転させるよう制御する。すなわち、制御部50は、椅子本体2を前位置状態から後方に揺動させる中で、第2検出センサ21によって椅子本体2が第1所定位置となったことを検出すると椅子本体2の後方への揺動速度を減速させ、続いて第1検出センサ20によって椅子本体2が後位置状態となったことを検出すると揺動方向を切り替えて椅子本体2を前方に揺動させる。続いて、制御部50は、椅子本体2を後位置状態から前方に揺動させる中で、第2検出センサ21によって椅子本体2が第1所定位置となったことを検出すると椅子本体2の前方への揺動速度を減速させ、続いて第1検出センサ20によって椅子本体2が前位置状態となったことを検出すると揺動方向を切り替えて椅子本体2を後方に揺動させる。なお、制御部50は、上記サイクルを繰り返し実行する。
【0086】
また、制御部50は、椅子本体2を脚フレーム6に対して前後に往復揺動させる中で、検出体23bが被検出体の通過を検出すると、モータ10aの回転方向を反転させるよう制御することもでき、椅子本体2を往復揺動させる範囲を、前後の軌道端部間、軌道前端部と第2所定位置の間、又は軌道後端部と第2所定位置の間と様々に設定することができる。椅子本体2を往復揺動させる範囲は、リモートコントローラ55を被施療者が操作することにより設定してもよいし、予め設定されたプログラムに従って時系列的に可変されるよう構成してもよい。往復揺動範囲がプログラムに従って時系列的に可変される構成とした場合、被施療者に対してバリエーションに富んだ揺れを与えることができ、よりリラックス感を与えることができる。
【0087】
[ストレッチ動作に係る構成]
以下、マッサージ機1の各ストレッチ動作について、図22〜図29に基づいて具体的に説明する。図22は幅センサ40の構成を示す模式図である。図23は各施療子61a,61b,62a,62bの近接状態を説明する説明図であり、(a)は第1近接状態を、(b)は第2近接状態を、(c)は幅広状態を夫々示している。なお、図22は、ヘリカルギヤ80aが有する回転軸80bの軸方向から見た図である。また、ストレッチ動作に関する以下の説明においては、図4に示す後位置状態におけるマッサージ機1に着座した被施療者から見たときの方向の概念と一致するものとし、その他の場合は適宜説明するものとする。ただし、マッサージ機構9の各構成に関する説明においては、身長方向を上下方向とし頭部側を「上」、腰部側を「下」と規定して説明する。また、以下の説明で用いる「脚部」とは、大腿部から足先に至る部位における少なくともいずれかを含む部位を指すものとする。
【0088】
図5に示すように、マッサージ機1は、制御部50に電気的に接続され、各施療子60a〜60hの左右位置を検出する幅センサ40を有している。この幅センサ40は、図22に示すように、揉みモータ80の出力軸に連動連結されたギヤボックス78内のヘリカルギヤ(減速器)80aの回転軸80bに一体回転可能に設けられた非検出体40aと、可動フレーム28に設けられ非検出体40aの通過を検出する検出体40bと、により構成された非接触式センサ(例えばホールIC)である。そして、非検出体40aが検出体40bを通過した回数を検出することにより、ヘリカルギヤ80aの回転数をパルス化して、そのパルス数を検出することにより、各施療子60a〜60hの左右位置を検出する。なお、この非検出体40aは、揉みモータ80の出力軸に一体回転可能に設けられていてもよいし、第1支持シャフト72に一体回転可能に設けられていてもよい。
【0089】
以下の説明では、図23(a)に示す下側の内側施療子61a(60f)及び下側の外側施療子61b(60h)が上側のそれらよりも近接し、且つ上側の対の内側施療子61a(60a),62a(60a)が下側のそれらよりも近接した状態を「第1近接状態」と称し、図23(b)に示す上側の内側施療子61a(60e)及び上側の外側施療子61b(60g)が下側のそれらよりも近接し、且つ下側の対の内側施療子61a(60b),62a(60b)が上側のそれらよりも近接した状態を「第2近接状態」と称する。また、この第1近接状態及び第2近接状態を総称して「幅狭状態」と称し、図23(c)に示す両アーム68,69が前方から見て略平行である状態を「幅広状態」と称する。そして、この幅センサ40は、第1近接状態(幅狭状態)、第2近接状態(幅狭状態)、及び幅広状態を夫々検出可能となっており、また揉みモータ80の回転方向についても検出可能となっている。
【0090】
図5に示すように、各ストレッチ動作を実行するためには、まず、被施療者は椅子本体2に着座してリモートコントローラ55の電源釦55aを操作して電源を入れ、コース釦55b〜55eを操作して所望するストレッチ動作が含まれるマッサージコースを設定する。前記操作を行うと、制御部50は揺動駆動部10を駆動制御してマッサージ機1を図4に示す後位置状態とさせる。従って、後述する各ストレッチ動作(その1〜その6)は後位置状態で行われることとなるが、好みに応じて被施療者がリモートコントローラ55を操作して図3に示す前位置状態に戻して各ストレッチ動作を行うことも可能である。
【0091】
[ストレッチ動作(その1)]
図24はストレッチ動作(その1)の動作説明図であり、(a)はマッサージ機構9が後退した状態、(b)はマッサージ機構9が進出した状態を夫々示している。ストレッチ動作(その1)は、マッサージ機構9を前後に揺動させて被施療者の脚部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その1)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9をフットレスト5の所定位置に位置させ、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、内側施療子61a,62a及び外側施療子61b,62bにより、左右の脚部を夫々挟持する。なお、被施療者の脚部は足先側に向かって先細り形状であるため、各施療子60の左右位置を下側の施療子60f,60hが相互に近接した第1近接状態とすることにより、脚部を効果的に挟持することができる。
【0092】
続いて、内側施療子61a,62a及び外側施療子61b,62bにより左右の脚部を夫々挟持した状態で進退モータ15cを駆動制御して、図24(a)に示す所定量後退した状態にあるマッサージ機構9(可動フレーム28)を図24(b)に示す所定量進出した状態まで矢視bに沿って前方へ揺動させる。従って、施療子60f,60hにより脚部が挟持された状態で、膝部分が矢視cに沿って略上方に持ち上げられて膝が曲げられ、且つ脹脛部分が矢視dに沿って略下方へ引き下げられるので、十分な脚伸ばし効果を得ることができる。この場合は、大腿部の表面側の筋肉が伸張されることとなる。
【0093】
続いて、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を幅広状態とさせて、内側施療子61a,62a及び外側施療子61b,62bにより挟持した脚部を開放する。そして、左右の脚部を開放した幅広状態で進退モータ15cを駆動制御して、図24(b)に示す所定量進出した状態にあるマッサージ機構9(可動フレーム28)を図24(a)に示す所定量後退した状態まで矢視eに沿って後方へ揺動させる。従って、膝部分が自重により矢視fに沿って略下方に移動して膝が伸ばされる。このように、このストレッチ動作(その1)は、内側施療子61a,62a及び外側施療子61b,62bによる脚部を挟持した状態でのマッサージ機構9の前方揺動と、脚部を開放した状態でのマッサージ機構9の後方揺動と、を交互に繰り返し行うことによって、脚部に対する緊張と弛緩が繰り返されるので、快適なストレッチ感を得ることができる。なお、マッサージ機構9を後方揺動させる動作は、脚部を開放させずに、内側施療子61a,62a及び外側施療子61b,62bによって脚部を挟持した状態(第1近接状態)で行ってもよい。
【0094】
[ストレッチ動作(その2)]
図25はストレッチ動作(その2)の動作説明図であり、(a)はマッサージ機構9が脹脛に位置した状態、(b)はマッサージ機構9が足首に位置した状態を夫々示している。ストレッチ動作(その2)は、マッサージ機構9を身長方向に移動させて被施療者の脚部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その2)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9をフットレスト5の所定位置に位置させ、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、内側施療子61a,62a及び外側施療子61b,62bにより、左右の脚部を夫々挟持する。なお、被施療者の脚部は足先側に向かって先細り形状であるため、各施療子60の左右位置を下側の施療子60f,60hが相互に近接した第1近接状態とすることにより、脚部を効果的に挟持することができる。
【0095】
続いて、内側施療子61a,62a及び外側施療子61b,62bにより左右の脚部を夫々挟持した状態で昇降モータ14を駆動制御して、図25(a)に示す脹脛近傍に位置するマッサージ機構9を図25(b)に示す足首近傍まで身長方向(矢視h)に沿って略前方へ移動させる。従って、施療子60f,60hにより脚部が挟持された状態で、脹脛がその長手方向へ引き伸ばされて膝が伸びるので、十分な脚伸ばし効果を得ることができる。
【0096】
続いて、内側施療子61a,62a及び外側施療子61b,62bにより左右の脚部を夫々挟持した状態で昇降モータ14を駆動制御して、図25(b)に示す足首近傍に位置するマッサージ機構9を図25(a)に示す脹脛近傍まで身長方向(矢視i)に沿って略後方へ移動させる。従って、施療子60f,60hにより脚部が挟持された状態で、脹脛をその長手方向膝側へ移動させるので、膝を曲げる脚部の屈曲運動を行わせることができる。このストレッチ動作(その2)において、内側施療子61a,62a及び外側施療子61b,62bによる脚部を挟持した状態でのマッサージ機構9の前方移動と後方移動は、交互に繰り返し行っても良いし、いずれか一方の移動を単独で行っても良い。また、ストレッチ動作(その1)とストレッチ動作(その2)は複合して実行されてもよい。また、ストレッチ動作(その1)とストレッチ動作(その2)は、各施療子60の左右位置を上側の施療子60e,60gが相互に近接した第2近接状態として行ってもよい。
【0097】
[ストレッチ動作(その3)]
図26はストレッチ動作(その3)の動作説明図であり、(a)はマッサージ機構9が首部に位置した状態を背中側から見た模式図、(b)は(a)を側面から見た模式図でありマッサージ機構9が後退した状態、(c)は(a)を側面から見た模式図でありマッサージ機構9が進出した状態を夫々示している。ストレッチ動作(その3)は、マッサージ機構9を前後に揺動させて被施療者の首部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その3)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9を背凭れ部4の所定位置に位置させ、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、図26(a)に示すように対の内側施療子61a,62aにより首部を挟持する。なお、各施療子60の左右位置を上側の施療子60a,60aが相互に近接した第1近接状態として行うことにより、マッサージ機構9の身長方向頭部側への移動限界位置を低く設定することができ、また、好ましくない頭部へのマッサージを避けることができる。
【0098】
続いて、対の内側施療子61a,62aにより首部を挟持した状態で進退モータ15cを駆動制御して、図26(b)に示す所定量後退した状態のマッサージ機構9を図26(c)に示す所定量進出した状態まで矢視jに沿ってマッサージ機構を前方へ揺動させる。従って、図26(c)に示すように頭部が前傾されるので、首筋伸ばし効果を得ることができる。続いて、対の内側施療子61a,62aにより首部を挟持した状態で進退モータ15cを駆動制御して、図26(c)に示す所定量進出した状態のマッサージ機構9を図26(b)に示す所定量後退した状態まで矢視kに沿ってマッサージ機構を後方へ揺動させる。従って、図26(b)に示すように頭部が後傾されるので、首筋伸ばし効果を得ることができる。
【0099】
[ストレッチ動作(その4)]
図27はストレッチ動作(その4)の動作説明図であり、(a)はマッサージ機構9が肩部に位置した状態を背中側から見た模式図、(b)は(a)を側面から見た模式図、(c)はマッサージ機構9が首部に位置した状態を背中側から見た模式図、(d)は(c)を側面から見た模式図である。ストレッチ動作(その4)は、マッサージ機構9を身長方向に移動させて被施療者の首部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その4)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9を背凭れ部4の所定位置に位置させ、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、図27(a)及び図27(c)に示すように対の内側施療子61a,62aにより首部を挟持する。なお、各施療子60の左右位置を上側の施療子60a,60aが相互に近接した第1近接状態とすることにより、マッサージ機構9の身長方向頭部側への移動限界位置を低く設定することができ、また、好ましくない頭部へのマッサージを避けることができる。
【0100】
続いて、対の内側施療子61a,62aにより首部を挟持した状態で昇降モータ14を駆動制御して、図27(b)に示す施療子60aが肩部(首の付け根)近傍に位置するマッサージ機構9を図27(d)に示す施療子60aが後頭部近傍に位置するまで身長方向(矢視l)に沿って略後方へ移動させる。従って、施療子60a,60aにより首部が挟持された状態で、首部がその長手方向へ引き伸ばされるので、十分な首筋伸ばし効果を得ることができる。
【0101】
このストレッチ動作(その3)及びストレッチ動作(その4)は、例えば、コース釦55d〜55eを複数操作することにより、複合して実行することもできる。この場合、制御部50は、昇降モータ14を駆動制御してマッサージ機構9を背凭れ部4の所定位置(例えば腰位置)に位置させ、進退モータ15cを駆動制御してマッサージ機構9を例えば図26(c)に示す状態まで所定量進出させる。続いて、昇降モータ14を駆動制御して、マッサージ機構9を所定量進出させた状態で背凭れ部4における首部近傍まで身長方向に沿って後方へ移動させる。続いて、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせて、対の内側施療子61a,62aにより首部を挟持し、且つ進退モータ15cを駆動制御してマッサージ機構9を例えば図26(b)に示す状態まで所定量後退させる。このようにマッサージ機構9を動作させることにより、施療子60a,60aにより首部が挟持された状態で、首部がその長手方向へ引き伸ばされながら頭部が後傾されるので、より大きな首筋伸ばし効果を得ることができる。
【0102】
[ストレッチ動作(その5)]
図28はストレッチ動作(その5)の動作説明図であり、(a)は第1近接状態のマッサージ機構9が腰部に位置した状態を背中側から見た模式図、(b)は第2近接状態のマッサージ機構9が首部に位置した状態を背中側から見た模式図である。ストレッチ動作(その5)は、マッサージ機構9を身長方向に移動させて被施療者の背中に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その5)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御してマッサージ機構9を背凭れ部4の所定位置に位置させる。マッサージ機構9を腰部側から頭部側へ移動させる際には、図28(a)に示すように、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせた状態で、昇降モータ14を駆動制御してマッサージ機構9を身長方向(矢視m)に沿って移動させる。一方、マッサージ機構9を頭部側から腰部側へ移動させる際には、図28(b)に示すように、揉みモータ80を駆動制御して、幅センサ40の検出結果に基づき各施療子60の左右位置を第2近接状態とさせた状態で、昇降モータ14を駆動制御してマッサージ機構9を身長方向(矢視n)に沿って移動させる。このようにマッサージ機構9を動作させることにより、対をなす内側施療子61a,62aの離隔距離ついて、マッサージ機構9の進行方向側を小さく設定しているので、十分な開胸ストレッチ効果を得ることができる。なお、マッサージ機構9を単なる移動目的で身長方向に移動させる際には、図23(c)に示すように各施療子60の左右位置を幅狭状態とさせて、マッサージ機構9を移動させる。
【0103】
[ストレッチ動作(その6)]
図29はストレッチ動作(その6)の動作説明図であり、(a)はマッサージ機構9が臀部に位置した状態を足先側から見た模式図、(b)は(a)を側面から見た模式図、(c)はマッサージ機構9が脚部に位置した状態を足先側から見た模式図、(d)は(c)を側面から見た模式図である。ストレッチ動作(その6)は、マッサージ機構9を身長方向に移動させて被施療者の脚部に対してストレッチ運動を行わせる動作である。
ストレッチ動作(その6)が含まれるマッサージコースが選択された場合は、制御部50は、昇降モータ14を駆動制御して、図29(b)に示すようにマッサージ機構9を座部3の所定位置に位置させ、揉みモータ80を駆動制御して、図29(a)に示すように幅センサ40の検出結果に基づき各施療子60の左右位置を第1近接状態とさせる。
【0104】
続いて、各施療子60の左右位置を第1近接状態とさせた状態で昇降モータ14を駆動制御してマッサージ機構9を座部3の所定位置から図29(d)に示すようにフットレスト5の所定位置まで身長方向(矢視o)に沿って移動させる。すなわち、対をなす下側の内側施療子61a(62a)及び下側の外側施療子61b(62b)の離隔距離を、図29(c)に示すように下側の両施療子61a(62a),61b(62b)が脚部の背面に当接可能なる幅分に維持した状態で、マッサージ機構9を座部3からフットレスト5にかけて移動させるのである。このようにマッサージ機構9を動作させることにより、対をなす内側施療子61a(62a)及び外側施療子61b(62b)の間に脚部が落ち込まず、両施療子61a(62a),61b(62b)が脚部の背面に当接した状態で、マッサージ機構9が脚部の長手方向に沿って足先側へ移動する。従って、膝が伸ばされ大腿部の背面側の筋肉が伸長されるので、十分な脚伸ばし効果を得ることができる。
【0105】
また、本発明のマッサージ機は、図示する形態に限らずこの発明の範囲内において他の形態のものであってもよい。
例えば、進退駆動部15は、マッサージ機構9の後面に設けた膨張収縮するエアセルにより構成してもよいし、マッサージ機構9の側面に設けたラック・ピニオン機構により構成してもよい。この場合、例えば、ベースフレーム27の側部フレーム27aにラックを設け、可動フレーム28の側部フレーム28aにピニオンを設けた構成とするのが好適である。これらのように構成された進退駆動部は、制御部50からの信号により、前述した進退駆動部15を用いた場合と同様の進退動作をマッサージ機構9,100に行わせることができる。
あるいは、このマッサージ機構9,100を、ガイドレールが背凭れ部のみに内装されているマッサージ機に適用してもよい。この場合、マッサージ機構9,100は、背凭れ部内のみを身長方向に沿って移動自在となる。
【産業上の利用可能性】
【0106】
本発明は、椅子本体内又はフットレスト内を移動自在に構成されたマッサージ機構を利用して、被施療者の被施療部に対してストレッチ運動を行わせることを可能としたマッサージ機に適用することができる。
【符号の説明】
【0107】
1 マッサージ機
2 椅子本体
3 座部
4 背凭れ部
5 フットレスト
9,100 マッサージ機構
29,101 進退ユニット
50 制御部
61a 内側施療子
61b 外側施療子
62a 内側施療子
62b 外側施療子
68,69 アーム
72 第1支持シャフト
80 駆動手段(揉みモータ)
81 駆動手段(叩きモータ)
84 内側傾斜軸部材
85 外側傾斜軸部材
【特許請求の範囲】
【請求項1】
被施療者が着座する座部と、被施療者が凭れる背凭れ部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、
前記椅子本体内において、前記背凭れ部から前記座部を経由して前記フットレストまでの間を移動自在に設けられたマッサージ機構と、
前記マッサージ機構の動作を制御する制御部と、
を有し、
前記マッサージ機構は、
左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、
前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、前記施療子により被施療部を挟んだ状態で、前記マッサージ機構を前後方向又は身長方向へ移動させるよう制御する
ことを特徴とするマッサージ機。
【請求項2】
前記マッサージ機構は、該マッサージ機構を被施療部に対して前後揺動させる進退ユニットを有し、
前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御する
ことを特徴とする請求項1に記載のマッサージ機。
【請求項3】
前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を身長方向へ移動させるよう制御する
ことを特徴とする請求項1又は2に記載のマッサージ機。
【請求項4】
前記マッサージ機構は、前記駆動手段によって、対をなす前記内側施療子間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、対をなす前記内側施療子により被施療者の首部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御する
ことを特徴とする請求項1〜3のいずれかに記載のマッサージ機。
【請求項5】
前記制御部は、
前記マッサージ機構を所定量進出させた状態で身長方向へ移動させ、
前記マッサージ機構が首部に位置した際に、対をなす前記内側施療子により被施療者の首部を挟んだ状態で前記マッサージ機構を所定量後退させるよう制御する
ことを特徴とする請求項4のいずれかに記載のマッサージ機。
【請求項6】
前記マッサージ機構は、
前記内側施療子が上下で対をなして構成され、
前記駆動手段によって、対をなす前記内側施療子間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、
対をなす上側の前記内側施療子の離隔距離を下側のそれよりも小さく設定して前記マッサージ機構を前記背凭れ部において身長方向頭部側へ移動させ、
対をなす下側の前記内側施療子の離隔距離を上側のそれよりも小さく設定して前記マッサージ機構を前記背凭れ部において身長方向腰部側へ移動させるよう制御する
ことを特徴とする請求項1〜5のいずれかに記載のマッサージ機。
【請求項7】
前記マッサージ機構は、
左右の前記内側施療子及び前記外側施療子を夫々支持すると共に、前記駆動手段により軸芯回りに回転する第1支持シャフトを有し、
該第1支持シャフトは、アームを介して前記内側施療子を支持する内側傾斜軸と、アームを介して前記外側施療子を支持する外側傾斜軸とを有し、前記内側傾斜軸及び前記外側傾斜軸は、前記軸芯に対して互いに異なる角度を有し、且つ対をなす前記内側傾斜軸は、前記軸芯に対して互いに異なる角度を有している
ことを特徴とする請求項1〜6のいずれかに記載のマッサージ機。
【請求項8】
被施療者の脚部を支持するフットレストと、
前記フットレストに脚部の長手方向に移動自在に設けられたマッサージ機構と、
前記マッサージ機構の動作を制御する制御部と、
を有し、
前記マッサージ機構は、
左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、
前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御する
ことを特徴とするマッサージ機。
【請求項9】
少なくとも被施療者が着座する座部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、
前記椅子本体内に設けられ、前記座部から前記フットレストまでの間を移動自在に構成されたマッサージ機構と、
前記マッサージ機構の動作を制御する制御部と、
を有し、
前記マッサージ機構は、
左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、
前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、対をなす前記内側施療子及び前記外側施療子の離隔距離を、両施療子が被施療者の脚部の背面に当接可能なる幅分に維持した状態で、前記マッサージ機構を前記座部から前記フットレストにかけて移動させるよう制御する
ことを特徴とするマッサージ機。
【請求項1】
被施療者が着座する座部と、被施療者が凭れる背凭れ部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、
前記椅子本体内において、前記背凭れ部から前記座部を経由して前記フットレストまでの間を移動自在に設けられたマッサージ機構と、
前記マッサージ機構の動作を制御する制御部と、
を有し、
前記マッサージ機構は、
左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、
前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、前記施療子により被施療部を挟んだ状態で、前記マッサージ機構を前後方向又は身長方向へ移動させるよう制御する
ことを特徴とするマッサージ機。
【請求項2】
前記マッサージ機構は、該マッサージ機構を被施療部に対して前後揺動させる進退ユニットを有し、
前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御する
ことを特徴とする請求項1に記載のマッサージ機。
【請求項3】
前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を身長方向へ移動させるよう制御する
ことを特徴とする請求項1又は2に記載のマッサージ機。
【請求項4】
前記マッサージ機構は、前記駆動手段によって、対をなす前記内側施療子間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、対をなす前記内側施療子により被施療者の首部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御する
ことを特徴とする請求項1〜3のいずれかに記載のマッサージ機。
【請求項5】
前記制御部は、
前記マッサージ機構を所定量進出させた状態で身長方向へ移動させ、
前記マッサージ機構が首部に位置した際に、対をなす前記内側施療子により被施療者の首部を挟んだ状態で前記マッサージ機構を所定量後退させるよう制御する
ことを特徴とする請求項4のいずれかに記載のマッサージ機。
【請求項6】
前記マッサージ機構は、
前記内側施療子が上下で対をなして構成され、
前記駆動手段によって、対をなす前記内側施療子間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、
対をなす上側の前記内側施療子の離隔距離を下側のそれよりも小さく設定して前記マッサージ機構を前記背凭れ部において身長方向頭部側へ移動させ、
対をなす下側の前記内側施療子の離隔距離を上側のそれよりも小さく設定して前記マッサージ機構を前記背凭れ部において身長方向腰部側へ移動させるよう制御する
ことを特徴とする請求項1〜5のいずれかに記載のマッサージ機。
【請求項7】
前記マッサージ機構は、
左右の前記内側施療子及び前記外側施療子を夫々支持すると共に、前記駆動手段により軸芯回りに回転する第1支持シャフトを有し、
該第1支持シャフトは、アームを介して前記内側施療子を支持する内側傾斜軸と、アームを介して前記外側施療子を支持する外側傾斜軸とを有し、前記内側傾斜軸及び前記外側傾斜軸は、前記軸芯に対して互いに異なる角度を有し、且つ対をなす前記内側傾斜軸は、前記軸芯に対して互いに異なる角度を有している
ことを特徴とする請求項1〜6のいずれかに記載のマッサージ機。
【請求項8】
被施療者の脚部を支持するフットレストと、
前記フットレストに脚部の長手方向に移動自在に設けられたマッサージ機構と、
前記マッサージ機構の動作を制御する制御部と、
を有し、
前記マッサージ機構は、
左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、
前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、対をなす前記内側施療子及び前記外側施療子により脚部を挟んだ状態で前記マッサージ機構を前方又は後方へ揺動させるよう制御する
ことを特徴とするマッサージ機。
【請求項9】
少なくとも被施療者が着座する座部と、被施療者の脚部を支持するフットレストと、により構成される椅子本体と、
前記椅子本体内に設けられ、前記座部から前記フットレストまでの間を移動自在に構成されたマッサージ機構と、
前記マッサージ機構の動作を制御する制御部と、
を有し、
前記マッサージ機構は、
左右に対をなす内側施療子と、該内側施療子と対をなして該内側施療子よりも左右方向の外側に離隔して設けられると共に左右に対をなす外側施療子と、これらの施療子を駆動する駆動手段と、を有し、
前記駆動手段によって、前記内側施療子と前記外側施療子との間の左右方向の離隔距離を変更可能に構成されており、
前記制御部は、対をなす前記内側施療子及び前記外側施療子の離隔距離を、両施療子が被施療者の脚部の背面に当接可能なる幅分に維持した状態で、前記マッサージ機構を前記座部から前記フットレストにかけて移動させるよう制御する
ことを特徴とするマッサージ機。
【図1】


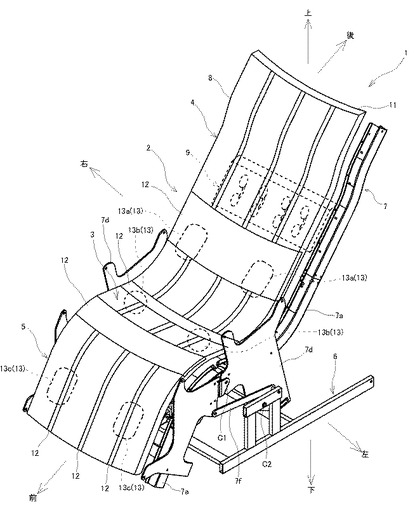
【図2】
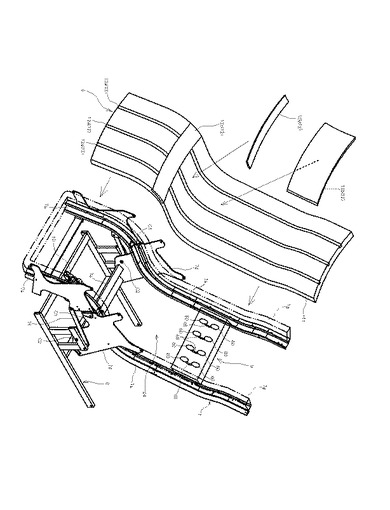
【図3】
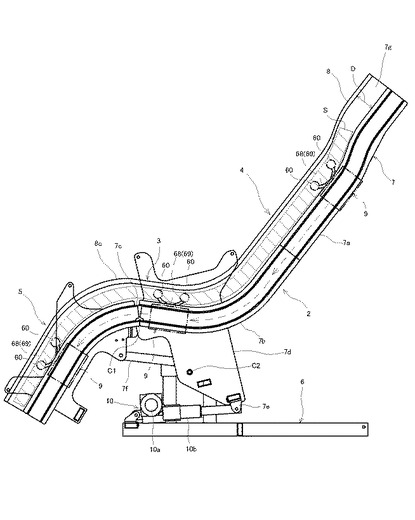
【図4】
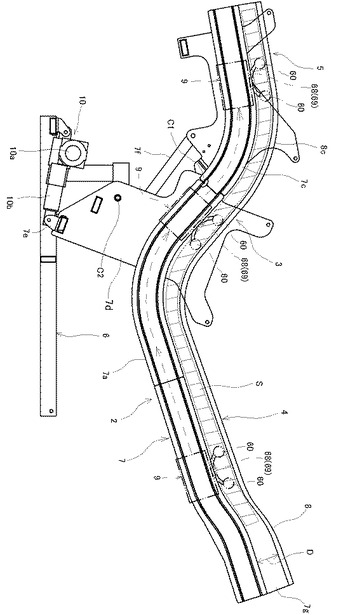
【図5】
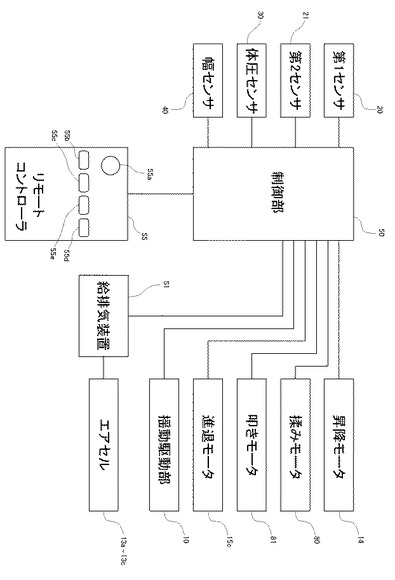
【図6】
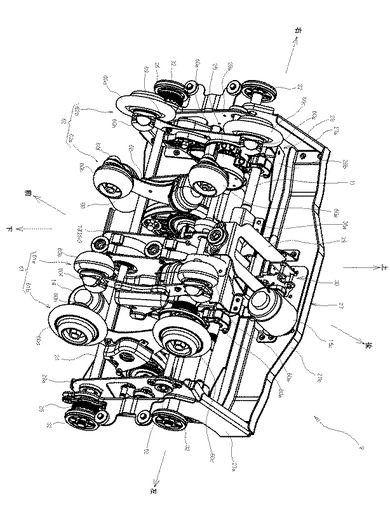
【図7】
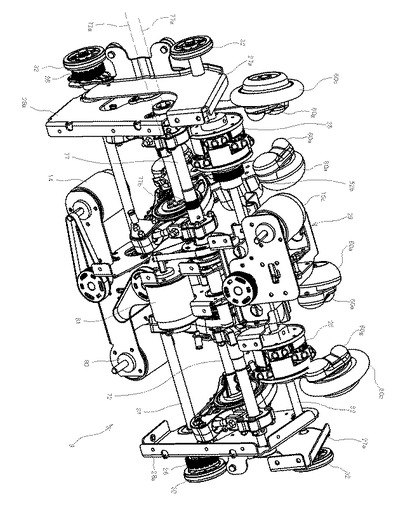
【図8】
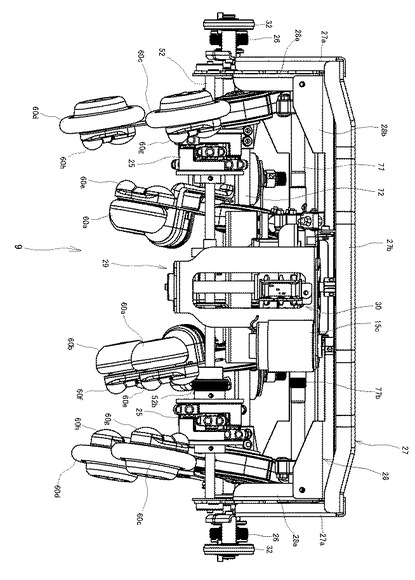
【図9】
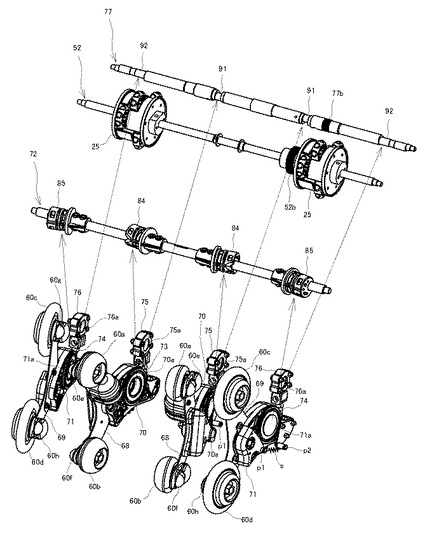
【図10】
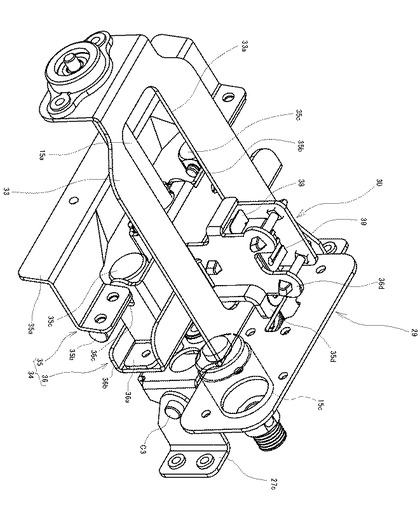
【図11】
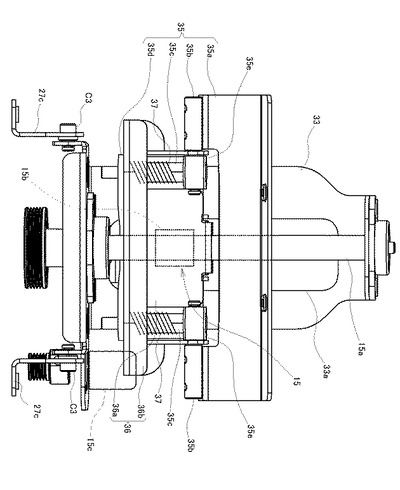
【図12】
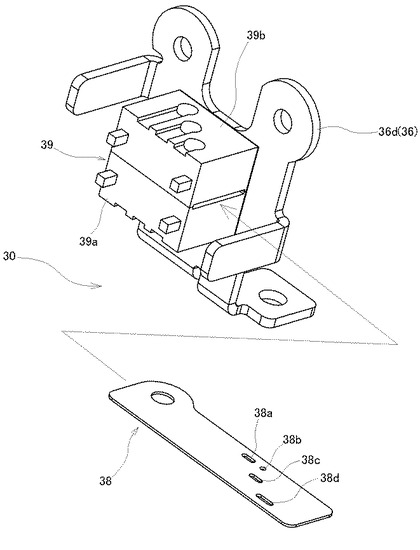
【図13】
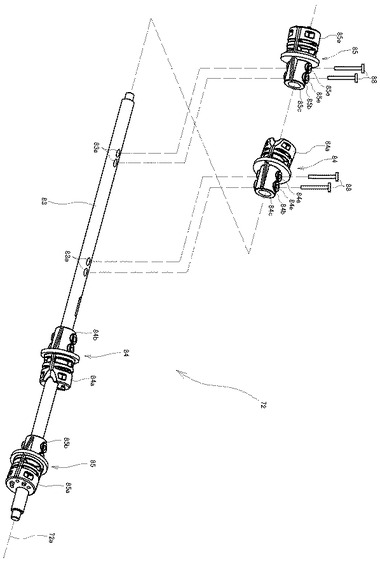
【図14】
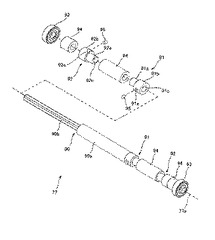
【図15】
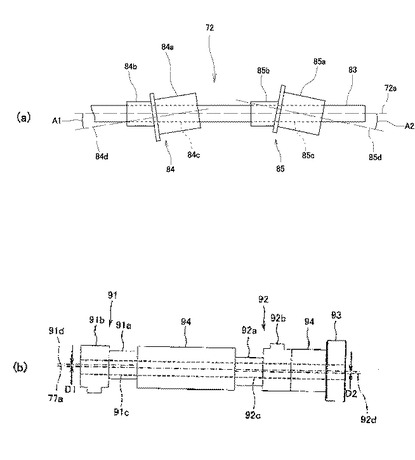
【図16】
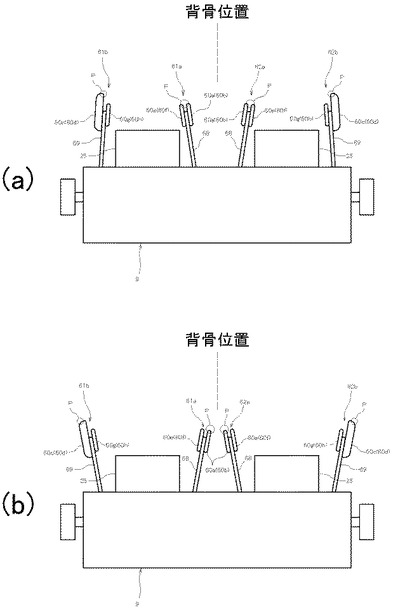
【図17】
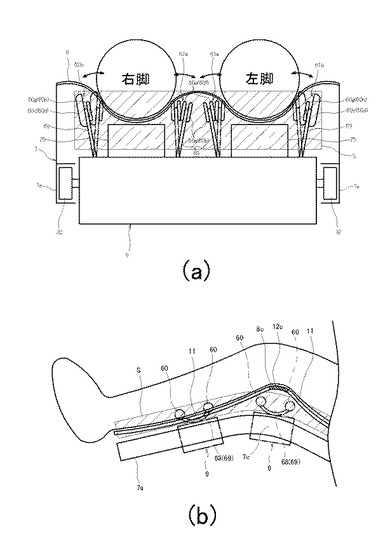
【図18】
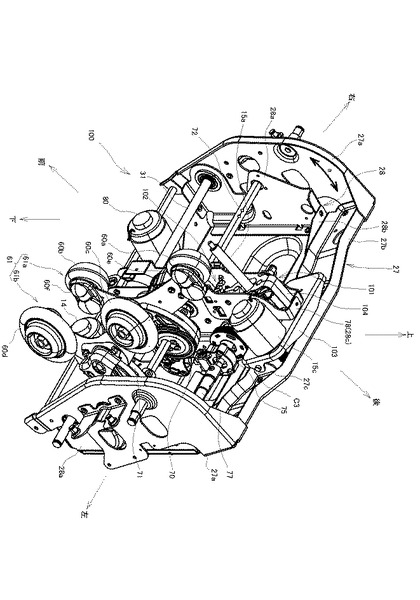
【図19】
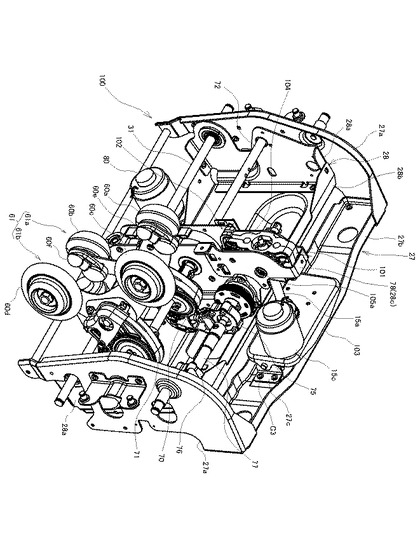
【図20】
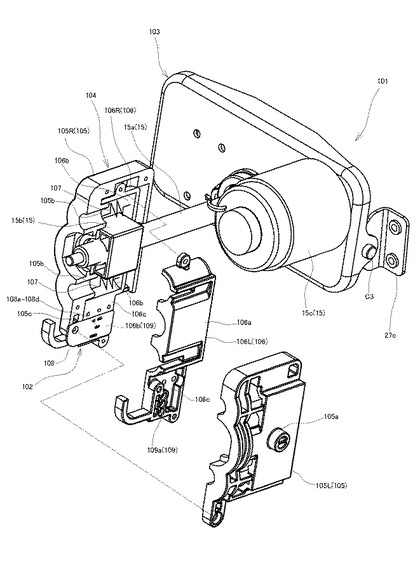
【図21】
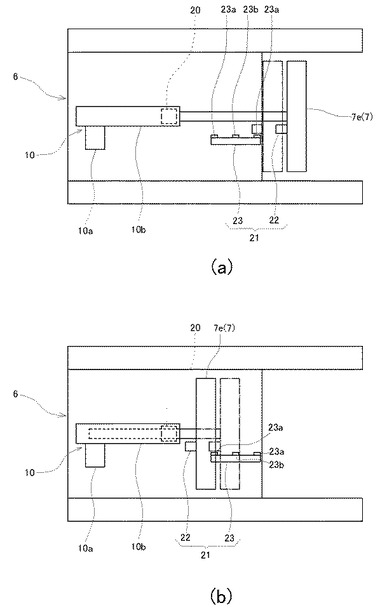
【図22】
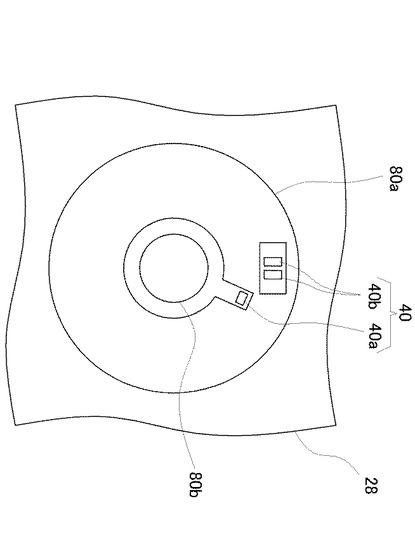
【図23】
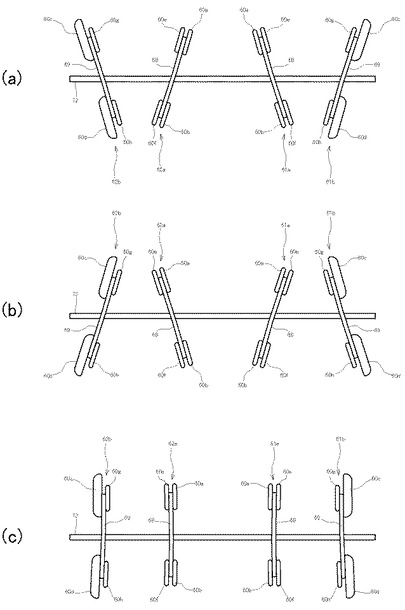
【図24】
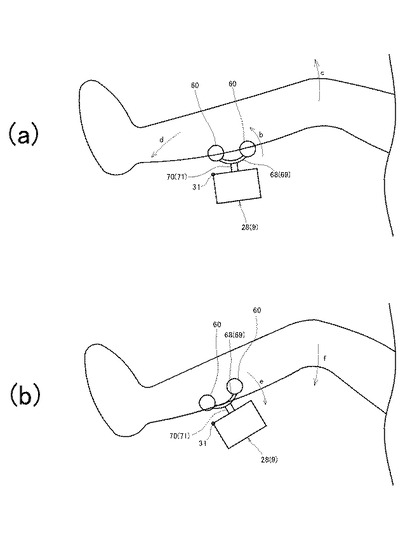
【図25】
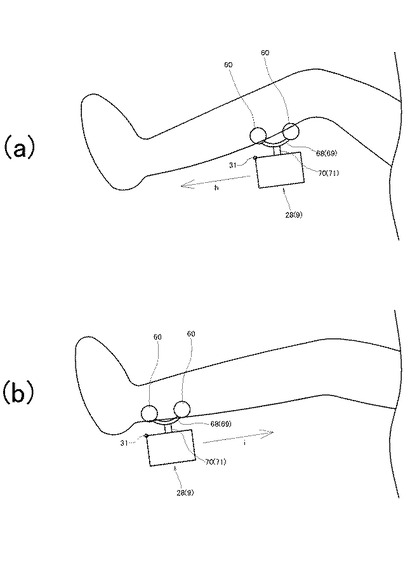
【図26】

【図27】
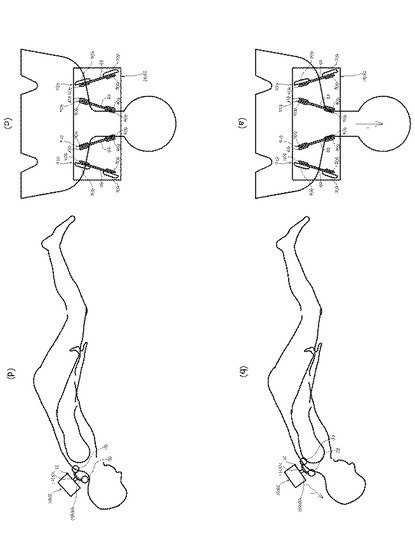
【図28】
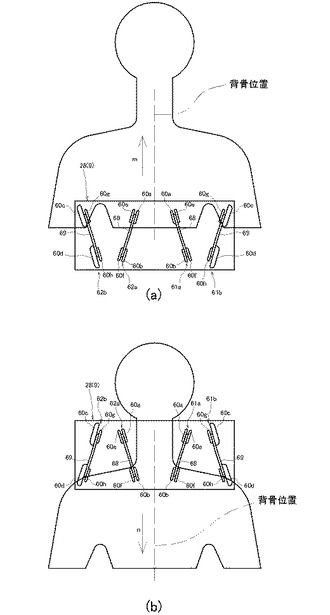
【図29】
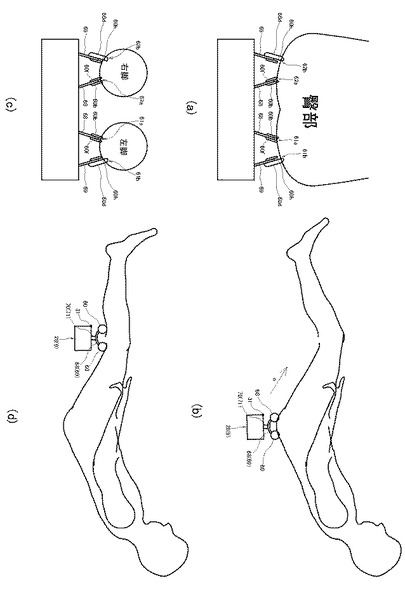
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2012−217526(P2012−217526A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−84161(P2011−84161)
【出願日】平成23年4月6日(2011.4.6)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月6日(2011.4.6)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]