
マッサージ機
【課題】使用者が施療子の動作を直感的に微調整することが可能なマッサージ機を提供する。
【解決手段】椅子式マッサージ機1は、使用者の身体をマッサージする施療子である揉み玉24と、使用者が揉み玉24の動作を指定するための操作部である操作機器40と、操作機器40の操作に応じて揉み玉24の動作を制御する制御部31とを備える。操作機器40は、外部から操作機器40に作用する力である操作力の大きさ、および操作力が作用する位置の変化の方向である操作方向の少なくとも一方を検出するセンサ部50を有する。制御部31は、操作力が作用する時間または操作方向に基づいて、揉み玉24の位置および揉み玉24が身体を押す力である押付力の少なくとも一方を相対的に調整する。
【解決手段】椅子式マッサージ機1は、使用者の身体をマッサージする施療子である揉み玉24と、使用者が揉み玉24の動作を指定するための操作部である操作機器40と、操作機器40の操作に応じて揉み玉24の動作を制御する制御部31とを備える。操作機器40は、外部から操作機器40に作用する力である操作力の大きさ、および操作力が作用する位置の変化の方向である操作方向の少なくとも一方を検出するセンサ部50を有する。制御部31は、操作力が作用する時間または操作方向に基づいて、揉み玉24の位置および揉み玉24が身体を押す力である押付力の少なくとも一方を相対的に調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、使用者の身体をマッサージする施療子と、使用者が前記施療子の動作を指定するための操作部と、操作部の操作に応じて施療子の動作を制御する制御部とを備えるマッサージ機に関する。
【背景技術】
【0002】
特許文献1のマッサージ機は、施療子の動作を指示する操作部を有する。操作部は、使用者が指を押し付けて力を加える被押圧面と、被押圧面に加えられた力により生じる力またはモーメントを検出するセンサ手段とを有する。制御部は、センサ手段により検出された力またはモーメントに応じて施療子を駆動する駆動部を制御する。このため、使用者は、被押圧面に加える力を変化させることにより施療子の動作を指示することができうる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4062241号
【発明の概要】
【発明が解決しようとする課題】
【0004】
使用者は、施療子の動作を微調整したいとき、例えば身体に対する施療子の位置を現在の位置から少しだけ移動させたいとき、希望する位置に施療子が移動するように被押圧面に生じる力またはモーメントを変化させる必要がある。しかし、被押圧面に生じる力またはモーメントと施療子の動作との関係は、直感的には把握しづらい。このため、要求どおりに施療子を移動させることが難しい。
【0005】
本発明は、上記課題を解決するためになされたものであり、使用者が施療子の動作を直感的に微調整することが可能なマッサージ機を提供することを目的としている。
【課題を解決するための手段】
【0006】
・本発明のマッサージ機は、使用者の身体をマッサージする施療子と、前記使用者が前記施療子の動作を指定するための操作部と、前記操作部の操作に応じて前記施療子の動作を制御する制御部とを備えるマッサージ機において、前記操作部は、外部から前記操作部に作用する力である操作力の大きさ、および前記操作力が作用する位置の変化の方向である操作方向の少なくとも一方を検出するセンサ部を有すること、ならびに、前記制御部は、前記操作力が作用する時間または前記操作方向に基づいて、前記施療子の位置および前記施療子が前記身体を押す力である押付力の少なくとも一方を相対的に調整することを特徴とする。
【0007】
・上記マッサージ機において、前記操作部は、人の身体を模した形状、または動物の身体を模した形状、または前記マッサージ機において前記施療子が設けられる部位を模した形状を示すことが好ましい。
【0008】
・上記マッサージ機において、前記センサ部は、前記操作方向に基づいて、前記操作部をなぞる動作を検出すること、ならびに、前記制御部は、前記なぞる動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0009】
・上記マッサージ機において、前記センサ部は、前記操作力が作用する時間に基づいて、前記操作部を叩く動作を検出すること、ならびに、前記制御部は、前記叩く動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0010】
・上記マッサージ機において、前記センサ部は、前記操作力が作用する時間に基づいて、前記操作部を長く押す動作を検出すること、ならびに、前記制御部は、前記長く押す動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0011】
・上記マッサージ機において、前記センサ部は、前記操作力が作用する時間に基づいて、所定時間内において前記操作部を複数回にわたり叩く動作を検出すること、ならびに、前記制御部は、前記複数回にわたり叩く動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0012】
・上記マッサージ機において、前記制御部は、前記操作部を縦方向になぞる動作が前記センサ部により検出されたとき、前記マッサージ機の上下方向における前記施療子の位置、および前記マッサージ機の上下方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0013】
・上記マッサージ機において、前記制御部は、前記操作部を横方向になぞる動作が前記センサ部により検出されたとき、前記マッサージ機の左右方向における前記施療子の位置、および前記マッサージ機の左右方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0014】
・上記マッサージ機において、前記制御部は、前記操作部を叩く動作が前記センサ部により検出されたとき、前記マッサージ機の前後方向における前記施療子の位置、および前記マッサージ機の前後方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0015】
・上記マッサージ機において、前記制御部は、前記操作部を長く押す動作が前記センサ部により検出されたとき、前記マッサージ機の前後方向における前記施療子の位置、および前記マッサージ機の前後方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0016】
・上記マッサージ機において、前記センサ部の検出結果を視覚的方法および聴覚的方法の少なくとも一方により報知する検出結果報知部を有することが好ましい。
・上記マッサージ機において、前記施療子の位置および前記施療子の押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを視覚的方法および聴覚的方法の少なくとも一方により報知する調整限界報知部を有することが好ましい。
【発明の効果】
【0017】
本発明によれば、使用者が施療子の動作を直感的に微調整することが可能なマッサージ機を提供することができる。
【図面の簡単な説明】
【0018】
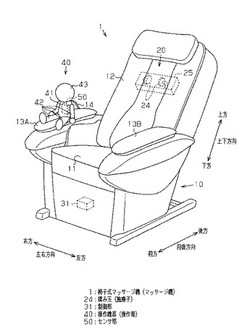
【図1】本発明の一実施形態のマッサージ機の概略構成を示す斜視図。
【図2】同実施形態のマッサージ機の概略構成を示すブロック図。
【図3】同実施形態のマッサージ機について、上下方向における施療子の位置調整を示す模式図。
【図4】同実施形態のマッサージ機について、左右方向における施療子の位置調整を示す模式図。
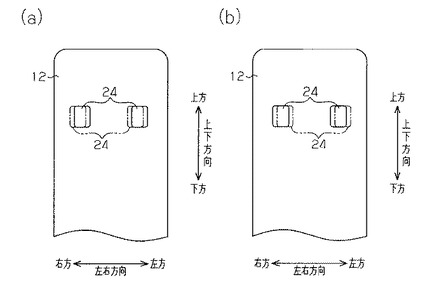
【図5】同実施形態のマッサージ機について、前後方向における施療子の位置調整を示す模式図。
【図6】同実施形態のマッサージ機について、操作部である操作機器の概略構成を示す構成図。
【図7】同実施形態のマッサージ機について、(a)は操作機器に設けられるセンサ部の側面図、(b)はセンサ部の平面図。
【図8】同実施形態のマッサージ機について、上下方向における施療子の位置調整を行うための動作を示す模式図。
【図9】同実施形態のマッサージ機について、左右方向における施療子の位置調整を行うための動作を示す模式図。
【図10】同実施形態のマッサージ機について、前後方向における施療子の位置調整を行うための動作を示す模式図。
【図11】本発明のその他の実施形態のマッサージ機について、上下方向におけるマッサージ力調整を示す模式図。
【図12】本発明のその他の実施形態のマッサージ機について、報知部の外観を示す外観図。
【図13】本発明のその他の実施形態のマッサージ機について、センサ部の構成を示す平面図。
【図14】本発明のその他の実施形態のマッサージ機について、センサ部の構成を示す平面図。
【図15】本発明のその他の実施形態のマッサージ機を示す斜視図。
【発明を実施するための形態】
【0019】
図1〜図10を参照して、本発明の一実施形態について説明する。
図1に示されるように、椅子式マッサージ機1は、使用者が腰掛ける着座部11と、使用者の背中が持たせ掛けられる背もたれ12と、使用者の肘が持たせ掛けられる肘掛け13A,13Bとが設けられた椅子10を備えている。
【0020】
以下、使用者の背中に沿って背もたれ12が延びる方向を上下方向とする。また、背もたれ12の下端部から着座部11が延びる方向を前後方向における前方とする。また、上下方向および前後方向に垂直な方向を左右方向とする。
【0021】
背もたれ12は、着座部11の後端部から上方に立っている。右肘掛け13Aと左肘掛け13Bとは着座部11を挟んで左右方向において間隔を空けて設けられている。背もたれ12を背にした状態で使用者が着座部11に腰掛けたとき、右肘掛け13Aに使用者の右肘が掛けられ、左肘掛け13Bに左肘が掛けられる。
【0022】
椅子式マッサージ機1は、揉み玉24を有するマッサージ機構20と、マッサージ機構20を制御する制御部31と、マッサージ機構20によるマッサージ動作を操作する人形型の操作機器40とを備えている。
【0023】
背もたれ12の内部に設けられたマッサージ機構20は、上下方向に移動可能な移動体25を有する。移動体25には、左右方向において間隔を空けて一対の揉み玉24が設けられている。揉み玉24は、前後方向および左右方向に移動可能に構成されている。
【0024】
一対の揉み玉24は、その間隔を大きくする動作と小さくする動作を繰り返すことにより使用者の身体を揉む。すなわち、揉み玉24は使用者の身体をマッサージする施療子に相当する。
【0025】
操作機器40は、椅子10と別体として構成されている。すなわち、図1においては操作機器40が右肘掛け13A上に設けられているが、操作機器40は右肘掛け13Aから持ち上げて使用することができる。操作機器40はコード14を介して椅子10と接続されている。操作機器40は揉み玉24のマッサージ動作を指定するための操作部に相当する。
【0026】
図2に示されるように、椅子式マッサージ機1の椅子10には、駆動機構21〜23を含むマッサージ機構20と、制御部31と、スピーカにより構成される報知部32とが設けられている。各駆動機構21〜23は、制御部31から入力される信号に基づいて動作する。
【0027】
第1駆動機構21は、上下方向に沿って延びるガイドレール21A(図3参照)と、移動体25を駆動させる電動モータ(図示略)とを有する。第1駆動機構21は、移動体25を上下方向に移動させることによって、揉み玉24の上下方向の位置を調整する。
【0028】
第2駆動機構22は、揉み玉24を駆動させる電動モータ(図示略)を有する。第2駆動機構22は、揉み玉24の左右方向の位置を調整する。
第3駆動機構23は、先端に揉み玉24が設けられたアーム26(図3参照)と、左右方向に平行な軸Aを中心としてアーム26を回転させる電動モータ(図示略)とを有する。第3駆動機構23は、揉み玉24の前後方向の位置を調整する。
【0029】
制御部31は、施療者である椅子式マッサージ機1の使用者により操作機器40が操作されたとき、操作機器40からコード14を介して入力される信号に基づいて、駆動機構21〜23を制御する。駆動機構21〜23が制御されることにより、揉み玉24の位置および使用者の身体を押す力である押付力が調整される。すなわち、制御部31は、操作機器40の操作に応じて揉み玉24のマッサージ動作を制御する。
【0030】
また、制御部31は、操作機器40から入力される信号に基づいて駆動機構21〜23を制御するとき、報知動作を報知部32に行わせる。すなわち、報知部32は、揉み玉24の位置が調整されるときに音もしくは音声を発生する。よって報知部32は、センサ部50の検出結果を聴覚的方法により報知する検出結果報知部に相当する。
【0031】
また、制御部31は、操作機器40から入力される信号に基づく揉み玉24の位置調整が不可能なとき、揉み玉24の位置が調整されるときと異なる音もしくは音声を発生させる。すなわち、報知部32は、揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを聴覚的方法により報知する調整限界報知部に相当する。
【0032】
図3を参照して、図2の第1駆動機構21による揉み玉24の位置調整について説明する。図3(a)および(b)において、実線で示す揉み玉24は、上下方向に位置調整が行われる前の位置を示している。また、二点鎖線で示す揉み玉24は、上下方向に位置調整が行われた後の位置を示している。
【0033】
第1駆動機構21は、揉み玉24を上方に移動させる信号が制御部31(図2参照)から入力されたとき、図3(a)に示すように、電動モータを用いてガイドレール21Aに沿って移動体25を上方に移動させる。また、揉み玉24を下方に移動させる信号が制御部31から入力されたとき、図3(b)に示すように、電動モータを用いてガイドレール21Aに沿って移動体25を下方に移動させる。このように、第1駆動機構21は上下方向における揉み玉24の位置を変化させる。また、第1駆動機構21が揉み玉24の位置を変化させる変化量は決められている。すなわち、揉み玉24を移動させる信号が制御部31から第1駆動機構21に入力されたとき、揉み玉24の位置は一段階だけ変化する。したがって、揉み玉24を移動させる信号が制御部31から第1駆動機構21に繰り返し入力されることにより、揉み玉24の位置は多段階で変化する。
【0034】
図4を参照して、図2の第2駆動機構22による揉み玉24の位置調整について説明する。図4(a)および(b)において、実線で示す揉み玉24は、左右方向に位置調整が行われる前の位置を示している。また、二点鎖線で示す揉み玉24は、左右方向に位置調整が行われた後の位置を示している。
【0035】
第2駆動機構22は、揉み玉24を右方に移動させる信号が制御部31(図2参照)から入力されたとき、図4(a)に示すように、電動モータを用いて背もたれ12において揉み玉24を右方に移動させる。また、揉み玉24を左方に移動させる信号が制御部31から入力されたとき、図4(b)に示すように、電動モータを用いて背もたれ12において揉み玉24を左方に移動させる。このように、第2駆動機構22は左右方向における揉み玉24の位置を変化させる。また、第2駆動機構22が揉み玉24の位置を変化させる変化量は決められている。すなわち、揉み玉24を移動させる信号が制御部31から第2駆動機構22に入力されたとき、揉み玉24の位置は一段階だけ変化する。したがって、揉み玉24を移動させる信号が制御部31から第2駆動機構22に繰り返し入力されることにより、揉み玉24の位置は多段階で変化する。
【0036】
図5を参照して、図2の第3駆動機構23による揉み玉24の位置調整について説明する。図5(a)および(b)において、実線で示す揉み玉24は、前後方向に位置調整が行われる前の位置を示している。また、二点鎖線で示す揉み玉24は、前後方向に位置調整が行われた後の位置を示している。
【0037】
第3駆動機構23は、揉み玉24を前方に移動させる信号が制御部31(図2参照)から入力されたとき、図5(a)に示すように、電動モータを用いてアーム26を前方に向けて回転させる。また、揉み玉24を後方に移動させる信号が制御部31から入力されたとき、図5(b)に示すように、電動モータを用いてアーム26を後方に向けて回転させる。このように、第3駆動機構23は前後方向における揉み玉24の位置を変化させる。また、第3駆動機構23が揉み玉24の位置を変化させる変化量は決められている。すなわち、揉み玉24を移動させる信号が制御部31から第3駆動機構23に入力されたとき、揉み玉24の位置は一段階だけ変化する。したがって、揉み玉24を移動させる信号が制御部31から第3駆動機構23に繰り返し入力されることにより、揉み玉24の位置は多段階で変化する。
【0038】
また、図5(a)中の二点鎖線で示す揉み玉24の突出量P1は、図5の実線で示す揉み玉24の突出量P2に比べて大きい。また、図5(b)中の二点鎖線で示す揉み玉24の突出量P3は、図5の実線で示す揉み玉24の突出量P2に比べて小さい。突出量P1,P2,P3は、上下方向に垂直な方向においてアーム26の回転中心となる軸Aから揉み玉24の先端までの距離である。すなわち、上下方向に垂直な方向において揉み玉24が前方に突出する度合いを示している。上下方向に垂直な方向において揉み玉24が前方に突出するほど、使用者が背もたれ12に持たせ掛けられたとき、揉み玉24が使用者の身体を押す力である押付力は大きい。したがって、第3駆動機構23は、前後方向における揉み玉24の位置を変化させることにより、揉み玉24の押付力を変化させる。
【0039】
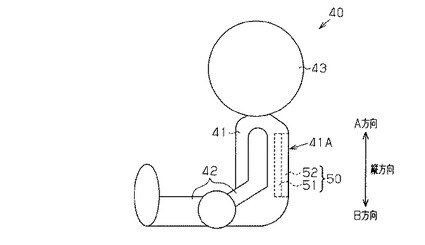
図6および図7を参照して、操作機器40について詳しく説明する。
図6に示されるように、操作機器40は、使用者の身体を模した形状を有する。すなわち、操作機器40は、体幹を模した胴体部41と、胴体部41から突出した四肢部42および頭部43とを有する。
【0040】
胴体部41は、図1の揉み玉24によりマッサージされる使用者の背中に相当する背中相当部41Aを有する。背中相当部41Aには、平板状のセンサ部50が設けられている。センサ部50は、外部から操作機器40に作用する力である操作力の大きさ、および操作力が作用する位置の変化の方向である操作方向を検出する。センサ部50は、操作力の大きさとしてセンサ部50に作用する力の大きさを検出するともに、操作方向としてセンサ部50において操作力が作用する位置の変化の方向を検出する。
【0041】
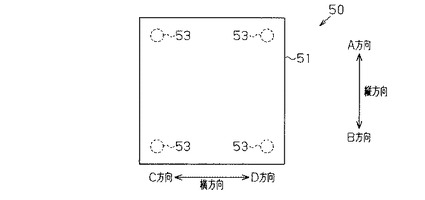
図7に示されるように、センサ部50は、センサ基板51と、センサ基板51上に設けられたシリコンゲル52と、センサ基板51に埋め込まれている多数の圧力センサ53とを有する。格子状に配列された複数の圧力センサ53は、互いに垂直な縦方向および横方向において所定間隔を空けて設けられている。圧力センサ53はシート状のシリコンゲル52により覆われている。
【0042】
使用者はセンサ部50をシリコンゲル52の上から指で押すことにより、図6の操作機器40を操作する。シリコンゲル52上から指で押されることにより、圧力センサ53は、その指がセンサ部50を押さえつける力に応じた電気信号を制御部31に出力する。指がセンサ部50を押さえつける力は、シリコンゲル52により分散されるため、シリコンゲル52上の任意の部位を指で押すと、その部位の周辺に設けられた圧力センサ53が電気信号を制御部31に出力する。また、指で押されたシリコンゲル52上の部位の近くに設けられた圧力センサ53ほど、大きな電気信号を制御部31に出力する。したがって、制御部31は、圧力センサ53の出力に基づいて、操作機器40のセンサ部50において使用者の指により押された位置を推定することができ、操作方向の検出は、複数の圧力センサ53の出力の時系列データに基づいて行われる。
【0043】
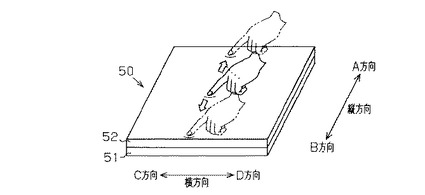
図8〜図10を参照して、センサ部50が検出する動作について説明する。
図8に示されるように、センサ部50は、指による操作方向に基づいて、図6に示す操作機器40のセンサ部50を縦方向になぞる動作を検出する。このとき、図2の制御部31は、センサ部50の検出結果に基づいて、センサ部50を縦方向になぞる動作として、A方向になぞる動作およびB方向になぞる動作のいずれかを検出する。センサ部50がA方向になぞられたとき、制御部31は、揉み玉24を上方に移動させる信号を図2に示す第1駆動機構21に出力する。センサ部50がB方向になぞられたとき、制御部31は、揉み玉24を下方に移動させる信号を図2に示す第1駆動機構21に出力する。
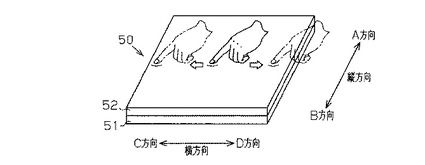
【0044】
図9に示されるように、センサ部50は、指による操作方向に基づいて、図6に示す操作機器40のセンサ部50を横方向になぞる動作を検出する。このとき、図2の制御部31は、センサ部50の検出結果に基づいて、センサ部50を横方向になぞる動作として、C方向になぞる動作およびD方向になぞる動作のいずれかを検出する。センサ部50がD方向になぞられたとき、制御部31は、揉み玉24を右方に移動させる信号を図2に示す第2駆動機構22に出力する。センサ部50がC方向になぞられたとき、制御部31は、揉み玉24を左方に移動させる信号を図2に示す第2駆動機構22に出力する。
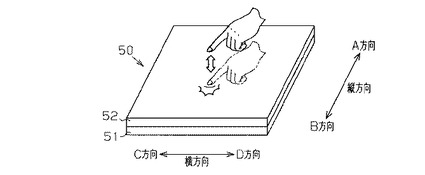
【0045】
図10に示されるように、センサ部50は、指による操作力が作用する時間に基づいて、操作機器40のセンサ部50を長く押す動作および叩く動作を検出する。図2の制御部31は、センサ部50において操作力が作用した時間が所定時間(例えば1秒)以上であれば、センサ部50を長く押す動作が検出されたと判定して、揉み玉24を前方に移動させる信号を図2に示す第3駆動機構23に出力する。また、制御部31は、センサ部50において操作力が作用した時間が所定時間(例えば1秒)未満であれば、センサ部50を叩く動作が検出されたと判定して、揉み玉24を後方に移動させる信号を図2に示す第3駆動機構23に出力する。
【0046】
上記構成による椅子式マッサージ機1の動作について説明する。
図8に示されるように、センサ部50を指で押した状態を維持してA方向に指を移動させたとき、すなわちA方向に指をなぞらせたとき、図3(a)に示されるように、揉み玉24が上方に移動する。また、センサ部50を指で押した状態を維持してB方向に指を移動させたとき、すなわちB方向に指をなぞらせたとき、図3(b)に示されるように、揉み玉24が下方に移動する。このように、制御部31は、操作機器40を縦方向になぞる動作がセンサ部50により検出されたとき、椅子式マッサージ機1の上下方向における揉み玉24の位置を変化させる。すなわち、制御部31は、操作機器40を操作する前の揉み玉24の位置に対して、揉み玉24の位置を変化させることにより、椅子式マッサージ機1の上下方向における揉み玉24の位置を相対的に調整する。
【0047】
また、図9に示されるように、センサ部50を指で押した状態を維持してD方向に指を移動させたとき、すなわちD方向に指をなぞらせたとき、図4(a)に示されるように、揉み玉24が右方に移動する。また、センサ部50を指で押した状態を維持してC方向に指を移動させたとき、すなわちC方向に指をなぞらせたとき、図4(b)に示されるように、揉み玉24が左方に移動する。このように、制御部31は、操作機器40を横方向になぞる動作がセンサ部50により検出されたとき、椅子式マッサージ機1の左右方向における揉み玉24の位置を変化させる。すなわち、制御部31は、操作機器40を操作する前の揉み玉24の位置に対して、揉み玉24の位置を変化させることにより、椅子式マッサージ機1の左右方向における揉み玉24の位置を相対的に調整する。
【0048】
なお、センサ部50を縦方向および横方向に対して斜めに指をなぞらせたとき、揉み玉24は上下方向および左右方向において同時に移動する。すなわち、制御部31は、操作機器40を縦方向および横方向に対して斜めになぞる動作がセンサ部50により検出されたとき、椅子式マッサージ機1の上下方向および左右方向における揉み玉24の位置を同時に変化させる。
【0049】
また、図10に示されるように、センサ部50を指で長く押したとき、図5(a)に示されるように、揉み玉24が前方に移動する。また、センサ部50を指で軽く叩いたとき、図5(b)に示されるように、揉み玉24が後方に移動する。このように、制御部31は、操作機器40を長く押す動作または叩く動作がセンサ部50により検出されたとき、椅子式マッサージ機1の前後方向における揉み玉24の位置を変化させる。すなわち、制御部31は、操作機器40を操作する前の揉み玉24の位置に対して、揉み玉24の位置を変化させることにより、椅子式マッサージ機1の前後方向における揉み玉24の位置および前後方向に作用する揉み玉24の押付力を相対的に調整する。
【0050】
揉み玉24の位置が相対的に調整されるとき、報知部32は、音もしくは音声を発生させて、センサ部50をなぞる動作、長く押す動作、または叩く動作を検出したことを報知する。また、揉み玉24の位置が相対的に調整できないとき、報知部32は、音もしくは音声を発生させて、揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを報知する。
【0051】
(実施形態の効果)
椅子式マッサージ機1によれば以下の効果が得られる。
(1)椅子式マッサージ機1は、揉み玉24と操作機器40と制御部31とを備える。操作機器40は、外部から操作機器40に作用する力である操作力の大きさ、およびその操作力が作用する位置の変化の方向である操作方向の少なくとも一方を検出するセンサ部50を有する。そして、制御部31は、操作力が作用する時間または操作方向に基づいて、揉み玉24の位置および揉み玉24が身体を押す力である押付力の少なくとも一方を相対的に調整すること。したがって、センサ部50によって検出される操作力の大きさおよび操作方向の一方に基づいて、制御部31が揉み玉24の位置および押付力の少なくとも一方を相対的に調整することにより、揉み玉24の動作を微調整することができる。このとき、揉み玉24の動作の微調整は、操作力が作用する時間または操作方向に基づいて行われる。すなわち、外部から操作機器40に力が作用する時間、または操作機器40において外部からの力が作用する位置の変化の方向に基づいて、揉み玉24の動作の微調整が行われる。よって、操作機器40をなぞる、叩く、長く押す、複数回叩く等の動作により揉み玉24の動作の微調整を行うことが可能となり、椅子式マッサージ機1の使用者は揉み玉24の動作を直感的に微調整することが可能となる。
【0052】
(2)操作機器40は、使用者の身体、すなわち人の身体を模した形状を示している。このため、椅子式マッサージ機1の使用者は、身体に対する揉み玉24の位置および押付力の少なくとも一方をより直感的に微調整することができる。
【0053】
(3)制御部31は、操作機器40のセンサ部50をなぞる動作に基づいて、揉み玉24の位置を相対的に調整するため、揉み玉24を移動させる方向を、なぞる動作により指定することができる。また、センサ部50の縦方向および横方向に対して斜めにセンサ部50をなぞることにより、上下方向および左右方向における揉み玉24の位置を素早く簡単に調整することができる。
【0054】
(4)制御部31は、操作機器40のセンサ部50を叩く動作に基づいて、揉み玉24の位置および押付力を相対的に調整する。このため、センサ部50の任意の部位を叩くことにより、前後方向における揉み玉24の位置および前後方向に作用する押付力を簡単に調整することができる。
【0055】
(5)制御部31は、操作機器40のセンサ部50を長く押す動作に基づいて、揉み玉24の位置および押付力を相対的に調整する。このため、センサ部50の任意の部位を叩くことにより、前後方向における揉み玉24の位置および前後方向に作用する押付力を簡単に調整することができる。
【0056】
(6)椅子式マッサージ機1は、センサ部50の検出結果を聴覚的方法により報知する報知部32を有するため、操作機器40を操作する動作が検出されていることを使用者が確認することができる。
【0057】
(7)椅子式マッサージ機1は、揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを聴覚的方法により報知する報知部32を有する。このため、揉み玉24の動作の微調整をそれ以上行うことができないことが故障によるものではないことを使用者が確認することができる。
【0058】
(その他の実施形態)
なお、本発明の実施態様は上記各実施形態に限られるものではなく、例えば以下に示すように変更することもできる。また以下の変形例は、上記各実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施することもできる。
【0059】
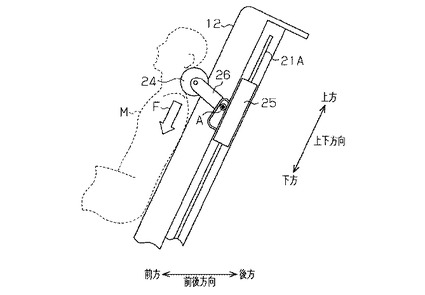
・上記実施形態において、制御部31は、操作機器40を縦方向になぞる動作がセンサ部50により検出されたとき、揉み玉24の位置を相対的に調整するが、これに代えて、上下方向に作用する揉み玉24の押付力を相対的に調整するように構成することもできる。例えば、図11に示されるように、揉み玉24が使用者Mの肩に設けられている状態において、第1駆動機構21が移動体25を駆動させることにより、揉み玉24が使用者Mの身体を押す力Fを相対的に調整することができる。また、第3駆動機構23がアーム26を前方に向けて回転させることにより、揉み玉24が使用者Mの身体を押す力Fを相対的に調整することもできる。したがって、操作機器40を縦方向になぞる動作がセンサ部50により検出されたとき、制御部31は、第1駆動機構21および第3駆動機構23の少なくとも一方を用いて、揉み玉24が身体を押す力である押付力を相対的に調整することもできる。
【0060】
・上記実施形態において、制御部31は、操作機器40を横方向になぞる動作がセンサ部50により検出されたとき、揉み玉24の位置を相対的に調整するが、これに代えて、左右方向に作用する揉み玉24の押付力を相対的に調整するように構成することもできる。例えば、センサ部50においてD方向に指をなぞらせたとき、一対の揉み玉24の間隔を狭くする構成を採用することにより、揉み玉24が使用者の身体を押す力を大きくする調整を行うことができる。また、センサ部50においてC方向に指をなぞらせたとき、一対の揉み玉24の間隔が広くする構成を採用することにより、揉み玉24が使用者の身体を押す力を小さくする調整を行うこともできる。したがって、操作機器40を横方向になぞる動作がセンサ部50により検出されたとき、制御部31は、揉み玉24が身体を押す力である押付力を相対的に調整することもできる。
【0061】
・上記実施形態において、センサ部50を1回なぞったときの揉み玉24の位置の変化量は決められているが、操作機器40のセンサ部50を指でなぞった距離に応じて、制御部31が揉み玉24の位置の変化量を決定することもできる。また、制御部31が、揉み玉24が身体を押す力である押付力を相対的に調整する構成において、操作機器40のセンサ部50を指でなぞった距離に応じて、制御部31が揉み玉24の押付力を決定することもできる。すなわち、制御部31は、外部からの力である操作力が操作機器40に作用した位置の変化量(操作量)に基づいて、揉み玉24の位置および押付力の少なくとも一方を相対的に調整することができる。
【0062】
・上記実施形態において、センサ部50を長く押す動作が検出されたときの揉み玉24の位置の変化量は決められているが、操作機器40のセンサ部50を指で押した時間に応じて、制御部31が揉み玉24の位置の変化量および押付力を決定することもできる。このような構成によれば、操作機器40のセンサ部50を指で押した状態を継続している間だけ揉み玉24の位置および押付力を変化させることができ、揉み玉24の動作をより一層直感的に微調整することが可能である。
【0063】
・上記実施形態において、センサ部50を長く押す動作または叩く動作が検出されたときの揉み玉24の位置の変化量は決められているが、操作力の大きさに応じて、制御部31が揉み玉24の位置の変化量および押付力を決定することもできる。また、操作力の大きさに応じて、揉み玉24の移動速度、すなわち揉み玉24の位置の調整速度を変化させることもできる。例えば、操作力の大きさが所定以上であるときは、揉み玉24の位置の調整速度を速くし、操作力の大きさが所定未満であるときは、揉み玉24の位置の調整速度を遅くすることもできる。
【0064】
・上記実施形態において、センサ部50を縦方向になぞったとき揉み玉24が上下方向に移動するが、例えば横方向にセンサ部50をなぞることにより揉み玉24を上下方向に移動させる構成を採用することもできる。このような構成によれば、センサ部50を縦方向および横方向のいずれか一方においてなぞるとき揉み玉24が上下方向に移動するため、上下方向における揉み玉24の位置の調整について2種類の調整方法を設定することができる。したがって、上下方向における揉み玉24の位置を調整する際の操作機器40の使い勝手を向上させることができる。また、センサ部50を縦方向になぞったときに揉み玉24を上下方向に移動させる量と、センサ部50を横方向になぞったときに揉み玉24を上下方向に移動させる量とを異ならせることもできる。また、操作機器40のセンサ部50を指でなぞることにより揉み玉24の押付力を相対的に調整する構成においても、横方向にセンサ部50をなぞることにより上下方向に作用する揉み玉24の押付力を相対的に調整する構成を採用することもできる。このような構成によれば、上下方向における揉み玉24の位置および上下方向に作用する揉み玉24の押付力を調整する際の操作機器40の使い勝手を向上させることができる。
【0065】
・上記実施形態において、センサ部50を横方向になぞったとき揉み玉24が左右方向に移動するが、例えば縦方向にセンサ部50をなぞることにより揉み玉24を左右方向に移動させる構成を採用することもできる。このような構成によれば、センサ部50を縦方向および横方向のいずれか一方においてなぞるとき揉み玉24が左右方向に移動するため、左右方向における揉み玉24の位置の調整について2種類の調整方法を設定することができる。したがって、左右方向における揉み玉24の位置を調整する際の操作機器40の使い勝手を向上させることができる。また、センサ部50を縦方向になぞったときに揉み玉24を左右方向に移動させる量と、センサ部50を横方向になぞったときに揉み玉24を左右方向に移動させる量とを異ならせることもできる。また、操作機器40のセンサ部50を指でなぞることにより揉み玉24の押付力を相対的に調整する構成においても、縦方向にセンサ部50をなぞることにより左右方向に作用する揉み玉24の押付力を相対的に調整する構成を採用することもできる。このような構成によれば、左右方向における揉み玉24の位置および左右方向に作用する揉み玉24の押付力を調整する際の操作機器40の使い勝手を向上させることができる。
【0066】
・上記実施形態において、センサ部50をなぞったとき揉み玉24が上下方向に移動するが、これに代えて、センサ部50をなぞったとき揉み玉24を前後方向に移動させる構成を採用することもできる。
【0067】
・上記実施形態において、センサ部50をなぞったとき揉み玉24が左右方向に移動するが、これに代えて、センサ部50をなぞったとき揉み玉24を前後方向に移動させる構成を採用することもできる。
【0068】
・上記実施形態において、センサ部50は、操作機器40をなぞる動作、叩く動作、および長く押す動作を検出するが、操作力が作用する時間に基づいて、操作機器40のセンサ部50を複数回にわたり叩く動作を検出することもできる。また、上記実施形態においては、センサ部50を指で長く押したとき揉み玉24が前方に移動する構成であるが、これに代えて、センサ部50を複数回にわたり叩いたときに揉み玉24を前方に移動させる構成を採用することもできる。すなわち、制御部31は、例えば、所定時間においてセンサ部50に操作力が所定回数作用したとき、センサ部50を複数回にわたり叩く動作が検出されたと判定して、揉み玉24を前方に移動させる信号を第3駆動機構23に出力することもできる。また、所定時間においてセンサ部50を叩いた回数に応じて、揉み玉24の位置を調整する構成を採用することもできる。例えば、所定時間(例えば1秒)において2回にわたり叩く動作を検出したときに、揉み玉24を上方に移動させて、所定時間(例えば1秒)において3回にわたり叩く動作を検出したときに、揉み玉24を下方に移動させる構成を採用することもできる。また、複数回にわたり叩く動作の間隔に応じて、揉み玉24の位置を調整する構成を採用することもできる。
【0069】
・上記実施形態において、操作機器40をなぞる動作に基づいて上下方向における揉み玉24の位置が調整されるが、叩く動作、長く押す動作、または複数回にわたり叩く動作に基づいて上下方向における揉み玉24の位置を調整することもできる。また、叩く動作、長く押す動作、または複数回にわたり叩く動作に基づいて上下方向に作用する揉み玉24の押付力を調整することもできる。
【0070】
・上記実施形態において、操作機器40をなぞる動作に基づいて左右方向における揉み玉24の位置が調整されるが、叩く動作、長く押す動作、または複数回にわたり叩く動作に基づいて左右方向における揉み玉24の位置を調整することもできる。また、叩く動作、長く押す動作、または複数回にわたり叩く動作に基づいて左右方向に作用する揉み玉24の押付力を調整することもできる。
【0071】
・上記実施形態において、操作機器40を叩く動作および長く押す動作に基づいて前後方向における揉み玉24の位置が調整されるが、なぞる動作または複数回にわたり叩く動作に基づいて前後方向における揉み玉24の位置および押付力を調整することもできる。
【0072】
・上記実施形態において、操作機器40を叩く動作が検出されたとき揉み玉24の押付力を小さくする調整が行われるが、長く押す動作または複数回にわたり叩く動作が検出されたとき揉み玉24の押付力を小さくする調整を行う構成を採用することもできる。
【0073】
・上記実施形態において、操作機器40を長く押す動作が検出されたとき揉み玉24の押付力を大きくする調整が行われるが、叩く動作または複数回にわたり叩く動作が検出されたとき揉み玉24の押付力を大きくする調整を行う構成を採用することもできる。
【0074】
・上記実施形態において、報知部32は椅子10に設けられているが、操作機器40に報知部32を設けることもできる。例えば、人形型の操作機器40において、口に相当する部位を含む頭部43に報知部32を設けることもできる。
【0075】
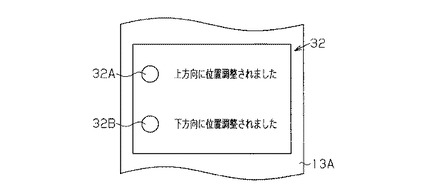
・上記実施形態において、報知部32はセンサ部50の検出結果を聴覚的方法により報知するが、例えば、図12に示されるように、LED(Light Emitting Diode)32A,32Bにより報知部32を構成することもできる。LED32A,32Bは、例えば、椅子10の右肘掛け13Aに設けられる。LED32Aは、揉み玉24を上方に移動させるときに点灯する。LED32Bは、揉み玉24を下方に移動させるときに点灯する。すなわち、報知部32が視覚的方法によりセンサ部50の検出結果を報知する構成であっても、上記(6)に記載の効果を得ることができる。なお、LED32A,32Bは、椅子10以外に設けることもできる。すなわち、報知部32を、例えば、操作機器40、または押しボタンが設けられる従来の操作機器(図示略)に設けることもできる。また、スピーカとLEDとの組合せにより検出結果報知部を構成することもできる。
【0076】
・上記実施形態において、報知部32は揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを聴覚的方法により報知するが、上記検出結果報知部と同様に、LEDにより報知部32を構成することもできる。すなわち、報知部32が視覚的方法により揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを報知する構成であっても、上記(7)に記載の効果を得ることができる。また、スピーカとLEDとの組合せにより調整限界報知部を構成することもできる。
【0077】
・上記実施形態において、圧力センサ53は格子状に設けられているが、圧力センサ53の配置および個数を適宜変更することもできる。例えば、図13に示されるように、センサ基板51の四隅に圧力センサ53を設ける構成を採用することもできる。このような構成によれば、図7(b)に示すセンサ部50に比べて圧力センサ53の個数を減らすことで低コスト化を図ることができる。
【0078】
・上記実施形態において、上下方向および左右方向および前後方向における揉み玉24の位置を調整することができるが、上下方向および左右方向および前後方向のいずれか1つの方向のみにおける揉み玉24の位置を調整する構成を採用することもできる。また、上下方向および左右方向および前後方向のいずれか2つの方向における揉み玉24の位置を調整する構成を採用することもできる。
【0079】
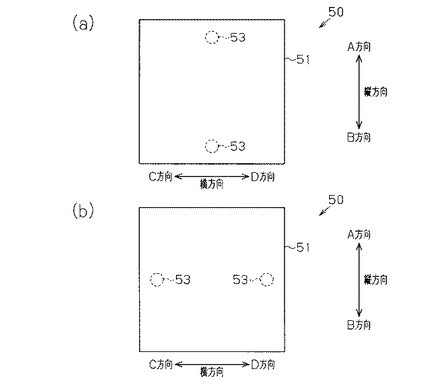
・上記実施形態において、操作機器40を縦方向および横方向になぞる動作がセンサ部50により検出されるが、縦方向になぞる動作または横方向になぞる動作のみが検出される構成を採用することもできる。例えば、図14(a)に示されるように、2つの圧力センサ53を縦方向に並べることにより、縦方向になぞる動作のみをセンサ部50に検出させることもできる。また、図14(b)に示されるように、2つの圧力センサ53を横方向に並べることにより、横方向になぞる動作のみをセンサ部50に検出させることもできる。このような構成によれば、図7(b)および図13に示すセンサ部50に比べて圧力センサ53の個数を減らすことで低コスト化を図ることができる。
【0080】
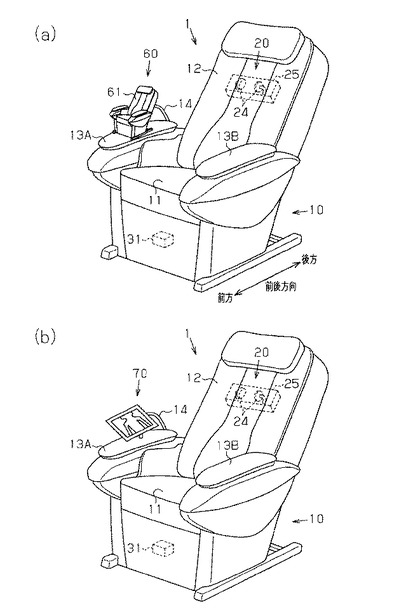
・上記実施形態において、操作機器40は人の身体を模した形状を有するが、例えば、動物の身体を模した形状や、その他の形状を有する操作機器を採用することもできる。例えば、図15(a)に示されるように、操作部を、椅子式マッサージ機1において揉み玉24が設けられる部位を模した形状を有する操作機器60により構成することもできる。椅子式マッサージ機1を模した操作機器60は背もたれ相当部61を有する。背もたれ相当部61は、揉み玉24が設けられる部位である背もたれ12を模して形成されている。このような構成であっても、この背もたれ相当部61にセンサ部50を設けることにより、上記(2)に準じた効果を得ることができる。なお、センサ部50は、図15(a)中の前方から作用する力を検出するように構成することができる。また、センサ部50は、図15(a)中の後方から作用する力を検出するように構成することもできる。
【0081】
・上記実施形態において、操作機器40は身体を模した立体的形状を有するが、例えば、人もしくは動物の身体を模した形状、または、椅子式マッサージ機1において揉み玉24が設けられる部位を模した形状を操作機器上の平面で示すようにすることもできる。例えば、図15(b)に示されるように、操作部を、人の身体を模した形状が描かれた操作機器70により構成することもできる。このような構成であっても、身体を模した形状が描かれた操作機器70にセンサ部50を設けることにより、上記(2)に準じた効果を得ることができる。
【0082】
・上記実施形態において、センサ部50は圧力センサ53により構成されているが、その他のセンサによりセンサ部を構成することもできる。また、抵抗膜方式または静電容量方式等の一般的なタッチパネルによりセンサ部を構成することもできる。
【0083】
・上記実施形態において、使用者が腰掛ける椅子式マッサージ機1に本発明を適用しているが、その他のマッサージ機に本発明を適用することもできる。例えば、脚をマッサージするフットマッサージ機に本発明を適用することもできる。
【0084】
・上記実施形態において、施療子は揉み玉24であるが、施療子として揉み玉24以外のものを採用することができる。例えば、突起が形成された指圧棒等を施療子とすることもできる。
【符号の説明】
【0085】
1…椅子式マッサージ機(マッサージ機)、24…揉み玉(施療子)、31…制御部、32…報知部(検出結果報知部、調整限界報知部)、40…操作機器(操作部)、50…センサ部、60,70…操作機器(操作部)。
【技術分野】
【0001】
本発明は、使用者の身体をマッサージする施療子と、使用者が前記施療子の動作を指定するための操作部と、操作部の操作に応じて施療子の動作を制御する制御部とを備えるマッサージ機に関する。
【背景技術】
【0002】
特許文献1のマッサージ機は、施療子の動作を指示する操作部を有する。操作部は、使用者が指を押し付けて力を加える被押圧面と、被押圧面に加えられた力により生じる力またはモーメントを検出するセンサ手段とを有する。制御部は、センサ手段により検出された力またはモーメントに応じて施療子を駆動する駆動部を制御する。このため、使用者は、被押圧面に加える力を変化させることにより施療子の動作を指示することができうる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4062241号
【発明の概要】
【発明が解決しようとする課題】
【0004】
使用者は、施療子の動作を微調整したいとき、例えば身体に対する施療子の位置を現在の位置から少しだけ移動させたいとき、希望する位置に施療子が移動するように被押圧面に生じる力またはモーメントを変化させる必要がある。しかし、被押圧面に生じる力またはモーメントと施療子の動作との関係は、直感的には把握しづらい。このため、要求どおりに施療子を移動させることが難しい。
【0005】
本発明は、上記課題を解決するためになされたものであり、使用者が施療子の動作を直感的に微調整することが可能なマッサージ機を提供することを目的としている。
【課題を解決するための手段】
【0006】
・本発明のマッサージ機は、使用者の身体をマッサージする施療子と、前記使用者が前記施療子の動作を指定するための操作部と、前記操作部の操作に応じて前記施療子の動作を制御する制御部とを備えるマッサージ機において、前記操作部は、外部から前記操作部に作用する力である操作力の大きさ、および前記操作力が作用する位置の変化の方向である操作方向の少なくとも一方を検出するセンサ部を有すること、ならびに、前記制御部は、前記操作力が作用する時間または前記操作方向に基づいて、前記施療子の位置および前記施療子が前記身体を押す力である押付力の少なくとも一方を相対的に調整することを特徴とする。
【0007】
・上記マッサージ機において、前記操作部は、人の身体を模した形状、または動物の身体を模した形状、または前記マッサージ機において前記施療子が設けられる部位を模した形状を示すことが好ましい。
【0008】
・上記マッサージ機において、前記センサ部は、前記操作方向に基づいて、前記操作部をなぞる動作を検出すること、ならびに、前記制御部は、前記なぞる動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0009】
・上記マッサージ機において、前記センサ部は、前記操作力が作用する時間に基づいて、前記操作部を叩く動作を検出すること、ならびに、前記制御部は、前記叩く動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0010】
・上記マッサージ機において、前記センサ部は、前記操作力が作用する時間に基づいて、前記操作部を長く押す動作を検出すること、ならびに、前記制御部は、前記長く押す動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0011】
・上記マッサージ機において、前記センサ部は、前記操作力が作用する時間に基づいて、所定時間内において前記操作部を複数回にわたり叩く動作を検出すること、ならびに、前記制御部は、前記複数回にわたり叩く動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0012】
・上記マッサージ機において、前記制御部は、前記操作部を縦方向になぞる動作が前記センサ部により検出されたとき、前記マッサージ機の上下方向における前記施療子の位置、および前記マッサージ機の上下方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0013】
・上記マッサージ機において、前記制御部は、前記操作部を横方向になぞる動作が前記センサ部により検出されたとき、前記マッサージ機の左右方向における前記施療子の位置、および前記マッサージ機の左右方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0014】
・上記マッサージ機において、前記制御部は、前記操作部を叩く動作が前記センサ部により検出されたとき、前記マッサージ機の前後方向における前記施療子の位置、および前記マッサージ機の前後方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0015】
・上記マッサージ機において、前記制御部は、前記操作部を長く押す動作が前記センサ部により検出されたとき、前記マッサージ機の前後方向における前記施療子の位置、および前記マッサージ機の前後方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整することが好ましい。
【0016】
・上記マッサージ機において、前記センサ部の検出結果を視覚的方法および聴覚的方法の少なくとも一方により報知する検出結果報知部を有することが好ましい。
・上記マッサージ機において、前記施療子の位置および前記施療子の押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを視覚的方法および聴覚的方法の少なくとも一方により報知する調整限界報知部を有することが好ましい。
【発明の効果】
【0017】
本発明によれば、使用者が施療子の動作を直感的に微調整することが可能なマッサージ機を提供することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態のマッサージ機の概略構成を示す斜視図。
【図2】同実施形態のマッサージ機の概略構成を示すブロック図。
【図3】同実施形態のマッサージ機について、上下方向における施療子の位置調整を示す模式図。
【図4】同実施形態のマッサージ機について、左右方向における施療子の位置調整を示す模式図。
【図5】同実施形態のマッサージ機について、前後方向における施療子の位置調整を示す模式図。
【図6】同実施形態のマッサージ機について、操作部である操作機器の概略構成を示す構成図。
【図7】同実施形態のマッサージ機について、(a)は操作機器に設けられるセンサ部の側面図、(b)はセンサ部の平面図。
【図8】同実施形態のマッサージ機について、上下方向における施療子の位置調整を行うための動作を示す模式図。
【図9】同実施形態のマッサージ機について、左右方向における施療子の位置調整を行うための動作を示す模式図。
【図10】同実施形態のマッサージ機について、前後方向における施療子の位置調整を行うための動作を示す模式図。
【図11】本発明のその他の実施形態のマッサージ機について、上下方向におけるマッサージ力調整を示す模式図。
【図12】本発明のその他の実施形態のマッサージ機について、報知部の外観を示す外観図。
【図13】本発明のその他の実施形態のマッサージ機について、センサ部の構成を示す平面図。
【図14】本発明のその他の実施形態のマッサージ機について、センサ部の構成を示す平面図。
【図15】本発明のその他の実施形態のマッサージ機を示す斜視図。
【発明を実施するための形態】
【0019】
図1〜図10を参照して、本発明の一実施形態について説明する。
図1に示されるように、椅子式マッサージ機1は、使用者が腰掛ける着座部11と、使用者の背中が持たせ掛けられる背もたれ12と、使用者の肘が持たせ掛けられる肘掛け13A,13Bとが設けられた椅子10を備えている。
【0020】
以下、使用者の背中に沿って背もたれ12が延びる方向を上下方向とする。また、背もたれ12の下端部から着座部11が延びる方向を前後方向における前方とする。また、上下方向および前後方向に垂直な方向を左右方向とする。
【0021】
背もたれ12は、着座部11の後端部から上方に立っている。右肘掛け13Aと左肘掛け13Bとは着座部11を挟んで左右方向において間隔を空けて設けられている。背もたれ12を背にした状態で使用者が着座部11に腰掛けたとき、右肘掛け13Aに使用者の右肘が掛けられ、左肘掛け13Bに左肘が掛けられる。
【0022】
椅子式マッサージ機1は、揉み玉24を有するマッサージ機構20と、マッサージ機構20を制御する制御部31と、マッサージ機構20によるマッサージ動作を操作する人形型の操作機器40とを備えている。
【0023】
背もたれ12の内部に設けられたマッサージ機構20は、上下方向に移動可能な移動体25を有する。移動体25には、左右方向において間隔を空けて一対の揉み玉24が設けられている。揉み玉24は、前後方向および左右方向に移動可能に構成されている。
【0024】
一対の揉み玉24は、その間隔を大きくする動作と小さくする動作を繰り返すことにより使用者の身体を揉む。すなわち、揉み玉24は使用者の身体をマッサージする施療子に相当する。
【0025】
操作機器40は、椅子10と別体として構成されている。すなわち、図1においては操作機器40が右肘掛け13A上に設けられているが、操作機器40は右肘掛け13Aから持ち上げて使用することができる。操作機器40はコード14を介して椅子10と接続されている。操作機器40は揉み玉24のマッサージ動作を指定するための操作部に相当する。
【0026】
図2に示されるように、椅子式マッサージ機1の椅子10には、駆動機構21〜23を含むマッサージ機構20と、制御部31と、スピーカにより構成される報知部32とが設けられている。各駆動機構21〜23は、制御部31から入力される信号に基づいて動作する。
【0027】
第1駆動機構21は、上下方向に沿って延びるガイドレール21A(図3参照)と、移動体25を駆動させる電動モータ(図示略)とを有する。第1駆動機構21は、移動体25を上下方向に移動させることによって、揉み玉24の上下方向の位置を調整する。
【0028】
第2駆動機構22は、揉み玉24を駆動させる電動モータ(図示略)を有する。第2駆動機構22は、揉み玉24の左右方向の位置を調整する。
第3駆動機構23は、先端に揉み玉24が設けられたアーム26(図3参照)と、左右方向に平行な軸Aを中心としてアーム26を回転させる電動モータ(図示略)とを有する。第3駆動機構23は、揉み玉24の前後方向の位置を調整する。
【0029】
制御部31は、施療者である椅子式マッサージ機1の使用者により操作機器40が操作されたとき、操作機器40からコード14を介して入力される信号に基づいて、駆動機構21〜23を制御する。駆動機構21〜23が制御されることにより、揉み玉24の位置および使用者の身体を押す力である押付力が調整される。すなわち、制御部31は、操作機器40の操作に応じて揉み玉24のマッサージ動作を制御する。
【0030】
また、制御部31は、操作機器40から入力される信号に基づいて駆動機構21〜23を制御するとき、報知動作を報知部32に行わせる。すなわち、報知部32は、揉み玉24の位置が調整されるときに音もしくは音声を発生する。よって報知部32は、センサ部50の検出結果を聴覚的方法により報知する検出結果報知部に相当する。
【0031】
また、制御部31は、操作機器40から入力される信号に基づく揉み玉24の位置調整が不可能なとき、揉み玉24の位置が調整されるときと異なる音もしくは音声を発生させる。すなわち、報知部32は、揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを聴覚的方法により報知する調整限界報知部に相当する。
【0032】
図3を参照して、図2の第1駆動機構21による揉み玉24の位置調整について説明する。図3(a)および(b)において、実線で示す揉み玉24は、上下方向に位置調整が行われる前の位置を示している。また、二点鎖線で示す揉み玉24は、上下方向に位置調整が行われた後の位置を示している。
【0033】
第1駆動機構21は、揉み玉24を上方に移動させる信号が制御部31(図2参照)から入力されたとき、図3(a)に示すように、電動モータを用いてガイドレール21Aに沿って移動体25を上方に移動させる。また、揉み玉24を下方に移動させる信号が制御部31から入力されたとき、図3(b)に示すように、電動モータを用いてガイドレール21Aに沿って移動体25を下方に移動させる。このように、第1駆動機構21は上下方向における揉み玉24の位置を変化させる。また、第1駆動機構21が揉み玉24の位置を変化させる変化量は決められている。すなわち、揉み玉24を移動させる信号が制御部31から第1駆動機構21に入力されたとき、揉み玉24の位置は一段階だけ変化する。したがって、揉み玉24を移動させる信号が制御部31から第1駆動機構21に繰り返し入力されることにより、揉み玉24の位置は多段階で変化する。
【0034】
図4を参照して、図2の第2駆動機構22による揉み玉24の位置調整について説明する。図4(a)および(b)において、実線で示す揉み玉24は、左右方向に位置調整が行われる前の位置を示している。また、二点鎖線で示す揉み玉24は、左右方向に位置調整が行われた後の位置を示している。
【0035】
第2駆動機構22は、揉み玉24を右方に移動させる信号が制御部31(図2参照)から入力されたとき、図4(a)に示すように、電動モータを用いて背もたれ12において揉み玉24を右方に移動させる。また、揉み玉24を左方に移動させる信号が制御部31から入力されたとき、図4(b)に示すように、電動モータを用いて背もたれ12において揉み玉24を左方に移動させる。このように、第2駆動機構22は左右方向における揉み玉24の位置を変化させる。また、第2駆動機構22が揉み玉24の位置を変化させる変化量は決められている。すなわち、揉み玉24を移動させる信号が制御部31から第2駆動機構22に入力されたとき、揉み玉24の位置は一段階だけ変化する。したがって、揉み玉24を移動させる信号が制御部31から第2駆動機構22に繰り返し入力されることにより、揉み玉24の位置は多段階で変化する。
【0036】
図5を参照して、図2の第3駆動機構23による揉み玉24の位置調整について説明する。図5(a)および(b)において、実線で示す揉み玉24は、前後方向に位置調整が行われる前の位置を示している。また、二点鎖線で示す揉み玉24は、前後方向に位置調整が行われた後の位置を示している。
【0037】
第3駆動機構23は、揉み玉24を前方に移動させる信号が制御部31(図2参照)から入力されたとき、図5(a)に示すように、電動モータを用いてアーム26を前方に向けて回転させる。また、揉み玉24を後方に移動させる信号が制御部31から入力されたとき、図5(b)に示すように、電動モータを用いてアーム26を後方に向けて回転させる。このように、第3駆動機構23は前後方向における揉み玉24の位置を変化させる。また、第3駆動機構23が揉み玉24の位置を変化させる変化量は決められている。すなわち、揉み玉24を移動させる信号が制御部31から第3駆動機構23に入力されたとき、揉み玉24の位置は一段階だけ変化する。したがって、揉み玉24を移動させる信号が制御部31から第3駆動機構23に繰り返し入力されることにより、揉み玉24の位置は多段階で変化する。
【0038】
また、図5(a)中の二点鎖線で示す揉み玉24の突出量P1は、図5の実線で示す揉み玉24の突出量P2に比べて大きい。また、図5(b)中の二点鎖線で示す揉み玉24の突出量P3は、図5の実線で示す揉み玉24の突出量P2に比べて小さい。突出量P1,P2,P3は、上下方向に垂直な方向においてアーム26の回転中心となる軸Aから揉み玉24の先端までの距離である。すなわち、上下方向に垂直な方向において揉み玉24が前方に突出する度合いを示している。上下方向に垂直な方向において揉み玉24が前方に突出するほど、使用者が背もたれ12に持たせ掛けられたとき、揉み玉24が使用者の身体を押す力である押付力は大きい。したがって、第3駆動機構23は、前後方向における揉み玉24の位置を変化させることにより、揉み玉24の押付力を変化させる。
【0039】
図6および図7を参照して、操作機器40について詳しく説明する。
図6に示されるように、操作機器40は、使用者の身体を模した形状を有する。すなわち、操作機器40は、体幹を模した胴体部41と、胴体部41から突出した四肢部42および頭部43とを有する。
【0040】
胴体部41は、図1の揉み玉24によりマッサージされる使用者の背中に相当する背中相当部41Aを有する。背中相当部41Aには、平板状のセンサ部50が設けられている。センサ部50は、外部から操作機器40に作用する力である操作力の大きさ、および操作力が作用する位置の変化の方向である操作方向を検出する。センサ部50は、操作力の大きさとしてセンサ部50に作用する力の大きさを検出するともに、操作方向としてセンサ部50において操作力が作用する位置の変化の方向を検出する。
【0041】
図7に示されるように、センサ部50は、センサ基板51と、センサ基板51上に設けられたシリコンゲル52と、センサ基板51に埋め込まれている多数の圧力センサ53とを有する。格子状に配列された複数の圧力センサ53は、互いに垂直な縦方向および横方向において所定間隔を空けて設けられている。圧力センサ53はシート状のシリコンゲル52により覆われている。
【0042】
使用者はセンサ部50をシリコンゲル52の上から指で押すことにより、図6の操作機器40を操作する。シリコンゲル52上から指で押されることにより、圧力センサ53は、その指がセンサ部50を押さえつける力に応じた電気信号を制御部31に出力する。指がセンサ部50を押さえつける力は、シリコンゲル52により分散されるため、シリコンゲル52上の任意の部位を指で押すと、その部位の周辺に設けられた圧力センサ53が電気信号を制御部31に出力する。また、指で押されたシリコンゲル52上の部位の近くに設けられた圧力センサ53ほど、大きな電気信号を制御部31に出力する。したがって、制御部31は、圧力センサ53の出力に基づいて、操作機器40のセンサ部50において使用者の指により押された位置を推定することができ、操作方向の検出は、複数の圧力センサ53の出力の時系列データに基づいて行われる。
【0043】
図8〜図10を参照して、センサ部50が検出する動作について説明する。
図8に示されるように、センサ部50は、指による操作方向に基づいて、図6に示す操作機器40のセンサ部50を縦方向になぞる動作を検出する。このとき、図2の制御部31は、センサ部50の検出結果に基づいて、センサ部50を縦方向になぞる動作として、A方向になぞる動作およびB方向になぞる動作のいずれかを検出する。センサ部50がA方向になぞられたとき、制御部31は、揉み玉24を上方に移動させる信号を図2に示す第1駆動機構21に出力する。センサ部50がB方向になぞられたとき、制御部31は、揉み玉24を下方に移動させる信号を図2に示す第1駆動機構21に出力する。
【0044】
図9に示されるように、センサ部50は、指による操作方向に基づいて、図6に示す操作機器40のセンサ部50を横方向になぞる動作を検出する。このとき、図2の制御部31は、センサ部50の検出結果に基づいて、センサ部50を横方向になぞる動作として、C方向になぞる動作およびD方向になぞる動作のいずれかを検出する。センサ部50がD方向になぞられたとき、制御部31は、揉み玉24を右方に移動させる信号を図2に示す第2駆動機構22に出力する。センサ部50がC方向になぞられたとき、制御部31は、揉み玉24を左方に移動させる信号を図2に示す第2駆動機構22に出力する。
【0045】
図10に示されるように、センサ部50は、指による操作力が作用する時間に基づいて、操作機器40のセンサ部50を長く押す動作および叩く動作を検出する。図2の制御部31は、センサ部50において操作力が作用した時間が所定時間(例えば1秒)以上であれば、センサ部50を長く押す動作が検出されたと判定して、揉み玉24を前方に移動させる信号を図2に示す第3駆動機構23に出力する。また、制御部31は、センサ部50において操作力が作用した時間が所定時間(例えば1秒)未満であれば、センサ部50を叩く動作が検出されたと判定して、揉み玉24を後方に移動させる信号を図2に示す第3駆動機構23に出力する。
【0046】
上記構成による椅子式マッサージ機1の動作について説明する。
図8に示されるように、センサ部50を指で押した状態を維持してA方向に指を移動させたとき、すなわちA方向に指をなぞらせたとき、図3(a)に示されるように、揉み玉24が上方に移動する。また、センサ部50を指で押した状態を維持してB方向に指を移動させたとき、すなわちB方向に指をなぞらせたとき、図3(b)に示されるように、揉み玉24が下方に移動する。このように、制御部31は、操作機器40を縦方向になぞる動作がセンサ部50により検出されたとき、椅子式マッサージ機1の上下方向における揉み玉24の位置を変化させる。すなわち、制御部31は、操作機器40を操作する前の揉み玉24の位置に対して、揉み玉24の位置を変化させることにより、椅子式マッサージ機1の上下方向における揉み玉24の位置を相対的に調整する。
【0047】
また、図9に示されるように、センサ部50を指で押した状態を維持してD方向に指を移動させたとき、すなわちD方向に指をなぞらせたとき、図4(a)に示されるように、揉み玉24が右方に移動する。また、センサ部50を指で押した状態を維持してC方向に指を移動させたとき、すなわちC方向に指をなぞらせたとき、図4(b)に示されるように、揉み玉24が左方に移動する。このように、制御部31は、操作機器40を横方向になぞる動作がセンサ部50により検出されたとき、椅子式マッサージ機1の左右方向における揉み玉24の位置を変化させる。すなわち、制御部31は、操作機器40を操作する前の揉み玉24の位置に対して、揉み玉24の位置を変化させることにより、椅子式マッサージ機1の左右方向における揉み玉24の位置を相対的に調整する。
【0048】
なお、センサ部50を縦方向および横方向に対して斜めに指をなぞらせたとき、揉み玉24は上下方向および左右方向において同時に移動する。すなわち、制御部31は、操作機器40を縦方向および横方向に対して斜めになぞる動作がセンサ部50により検出されたとき、椅子式マッサージ機1の上下方向および左右方向における揉み玉24の位置を同時に変化させる。
【0049】
また、図10に示されるように、センサ部50を指で長く押したとき、図5(a)に示されるように、揉み玉24が前方に移動する。また、センサ部50を指で軽く叩いたとき、図5(b)に示されるように、揉み玉24が後方に移動する。このように、制御部31は、操作機器40を長く押す動作または叩く動作がセンサ部50により検出されたとき、椅子式マッサージ機1の前後方向における揉み玉24の位置を変化させる。すなわち、制御部31は、操作機器40を操作する前の揉み玉24の位置に対して、揉み玉24の位置を変化させることにより、椅子式マッサージ機1の前後方向における揉み玉24の位置および前後方向に作用する揉み玉24の押付力を相対的に調整する。
【0050】
揉み玉24の位置が相対的に調整されるとき、報知部32は、音もしくは音声を発生させて、センサ部50をなぞる動作、長く押す動作、または叩く動作を検出したことを報知する。また、揉み玉24の位置が相対的に調整できないとき、報知部32は、音もしくは音声を発生させて、揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを報知する。
【0051】
(実施形態の効果)
椅子式マッサージ機1によれば以下の効果が得られる。
(1)椅子式マッサージ機1は、揉み玉24と操作機器40と制御部31とを備える。操作機器40は、外部から操作機器40に作用する力である操作力の大きさ、およびその操作力が作用する位置の変化の方向である操作方向の少なくとも一方を検出するセンサ部50を有する。そして、制御部31は、操作力が作用する時間または操作方向に基づいて、揉み玉24の位置および揉み玉24が身体を押す力である押付力の少なくとも一方を相対的に調整すること。したがって、センサ部50によって検出される操作力の大きさおよび操作方向の一方に基づいて、制御部31が揉み玉24の位置および押付力の少なくとも一方を相対的に調整することにより、揉み玉24の動作を微調整することができる。このとき、揉み玉24の動作の微調整は、操作力が作用する時間または操作方向に基づいて行われる。すなわち、外部から操作機器40に力が作用する時間、または操作機器40において外部からの力が作用する位置の変化の方向に基づいて、揉み玉24の動作の微調整が行われる。よって、操作機器40をなぞる、叩く、長く押す、複数回叩く等の動作により揉み玉24の動作の微調整を行うことが可能となり、椅子式マッサージ機1の使用者は揉み玉24の動作を直感的に微調整することが可能となる。
【0052】
(2)操作機器40は、使用者の身体、すなわち人の身体を模した形状を示している。このため、椅子式マッサージ機1の使用者は、身体に対する揉み玉24の位置および押付力の少なくとも一方をより直感的に微調整することができる。
【0053】
(3)制御部31は、操作機器40のセンサ部50をなぞる動作に基づいて、揉み玉24の位置を相対的に調整するため、揉み玉24を移動させる方向を、なぞる動作により指定することができる。また、センサ部50の縦方向および横方向に対して斜めにセンサ部50をなぞることにより、上下方向および左右方向における揉み玉24の位置を素早く簡単に調整することができる。
【0054】
(4)制御部31は、操作機器40のセンサ部50を叩く動作に基づいて、揉み玉24の位置および押付力を相対的に調整する。このため、センサ部50の任意の部位を叩くことにより、前後方向における揉み玉24の位置および前後方向に作用する押付力を簡単に調整することができる。
【0055】
(5)制御部31は、操作機器40のセンサ部50を長く押す動作に基づいて、揉み玉24の位置および押付力を相対的に調整する。このため、センサ部50の任意の部位を叩くことにより、前後方向における揉み玉24の位置および前後方向に作用する押付力を簡単に調整することができる。
【0056】
(6)椅子式マッサージ機1は、センサ部50の検出結果を聴覚的方法により報知する報知部32を有するため、操作機器40を操作する動作が検出されていることを使用者が確認することができる。
【0057】
(7)椅子式マッサージ機1は、揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを聴覚的方法により報知する報知部32を有する。このため、揉み玉24の動作の微調整をそれ以上行うことができないことが故障によるものではないことを使用者が確認することができる。
【0058】
(その他の実施形態)
なお、本発明の実施態様は上記各実施形態に限られるものではなく、例えば以下に示すように変更することもできる。また以下の変形例は、上記各実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施することもできる。
【0059】
・上記実施形態において、制御部31は、操作機器40を縦方向になぞる動作がセンサ部50により検出されたとき、揉み玉24の位置を相対的に調整するが、これに代えて、上下方向に作用する揉み玉24の押付力を相対的に調整するように構成することもできる。例えば、図11に示されるように、揉み玉24が使用者Mの肩に設けられている状態において、第1駆動機構21が移動体25を駆動させることにより、揉み玉24が使用者Mの身体を押す力Fを相対的に調整することができる。また、第3駆動機構23がアーム26を前方に向けて回転させることにより、揉み玉24が使用者Mの身体を押す力Fを相対的に調整することもできる。したがって、操作機器40を縦方向になぞる動作がセンサ部50により検出されたとき、制御部31は、第1駆動機構21および第3駆動機構23の少なくとも一方を用いて、揉み玉24が身体を押す力である押付力を相対的に調整することもできる。
【0060】
・上記実施形態において、制御部31は、操作機器40を横方向になぞる動作がセンサ部50により検出されたとき、揉み玉24の位置を相対的に調整するが、これに代えて、左右方向に作用する揉み玉24の押付力を相対的に調整するように構成することもできる。例えば、センサ部50においてD方向に指をなぞらせたとき、一対の揉み玉24の間隔を狭くする構成を採用することにより、揉み玉24が使用者の身体を押す力を大きくする調整を行うことができる。また、センサ部50においてC方向に指をなぞらせたとき、一対の揉み玉24の間隔が広くする構成を採用することにより、揉み玉24が使用者の身体を押す力を小さくする調整を行うこともできる。したがって、操作機器40を横方向になぞる動作がセンサ部50により検出されたとき、制御部31は、揉み玉24が身体を押す力である押付力を相対的に調整することもできる。
【0061】
・上記実施形態において、センサ部50を1回なぞったときの揉み玉24の位置の変化量は決められているが、操作機器40のセンサ部50を指でなぞった距離に応じて、制御部31が揉み玉24の位置の変化量を決定することもできる。また、制御部31が、揉み玉24が身体を押す力である押付力を相対的に調整する構成において、操作機器40のセンサ部50を指でなぞった距離に応じて、制御部31が揉み玉24の押付力を決定することもできる。すなわち、制御部31は、外部からの力である操作力が操作機器40に作用した位置の変化量(操作量)に基づいて、揉み玉24の位置および押付力の少なくとも一方を相対的に調整することができる。
【0062】
・上記実施形態において、センサ部50を長く押す動作が検出されたときの揉み玉24の位置の変化量は決められているが、操作機器40のセンサ部50を指で押した時間に応じて、制御部31が揉み玉24の位置の変化量および押付力を決定することもできる。このような構成によれば、操作機器40のセンサ部50を指で押した状態を継続している間だけ揉み玉24の位置および押付力を変化させることができ、揉み玉24の動作をより一層直感的に微調整することが可能である。
【0063】
・上記実施形態において、センサ部50を長く押す動作または叩く動作が検出されたときの揉み玉24の位置の変化量は決められているが、操作力の大きさに応じて、制御部31が揉み玉24の位置の変化量および押付力を決定することもできる。また、操作力の大きさに応じて、揉み玉24の移動速度、すなわち揉み玉24の位置の調整速度を変化させることもできる。例えば、操作力の大きさが所定以上であるときは、揉み玉24の位置の調整速度を速くし、操作力の大きさが所定未満であるときは、揉み玉24の位置の調整速度を遅くすることもできる。
【0064】
・上記実施形態において、センサ部50を縦方向になぞったとき揉み玉24が上下方向に移動するが、例えば横方向にセンサ部50をなぞることにより揉み玉24を上下方向に移動させる構成を採用することもできる。このような構成によれば、センサ部50を縦方向および横方向のいずれか一方においてなぞるとき揉み玉24が上下方向に移動するため、上下方向における揉み玉24の位置の調整について2種類の調整方法を設定することができる。したがって、上下方向における揉み玉24の位置を調整する際の操作機器40の使い勝手を向上させることができる。また、センサ部50を縦方向になぞったときに揉み玉24を上下方向に移動させる量と、センサ部50を横方向になぞったときに揉み玉24を上下方向に移動させる量とを異ならせることもできる。また、操作機器40のセンサ部50を指でなぞることにより揉み玉24の押付力を相対的に調整する構成においても、横方向にセンサ部50をなぞることにより上下方向に作用する揉み玉24の押付力を相対的に調整する構成を採用することもできる。このような構成によれば、上下方向における揉み玉24の位置および上下方向に作用する揉み玉24の押付力を調整する際の操作機器40の使い勝手を向上させることができる。
【0065】
・上記実施形態において、センサ部50を横方向になぞったとき揉み玉24が左右方向に移動するが、例えば縦方向にセンサ部50をなぞることにより揉み玉24を左右方向に移動させる構成を採用することもできる。このような構成によれば、センサ部50を縦方向および横方向のいずれか一方においてなぞるとき揉み玉24が左右方向に移動するため、左右方向における揉み玉24の位置の調整について2種類の調整方法を設定することができる。したがって、左右方向における揉み玉24の位置を調整する際の操作機器40の使い勝手を向上させることができる。また、センサ部50を縦方向になぞったときに揉み玉24を左右方向に移動させる量と、センサ部50を横方向になぞったときに揉み玉24を左右方向に移動させる量とを異ならせることもできる。また、操作機器40のセンサ部50を指でなぞることにより揉み玉24の押付力を相対的に調整する構成においても、縦方向にセンサ部50をなぞることにより左右方向に作用する揉み玉24の押付力を相対的に調整する構成を採用することもできる。このような構成によれば、左右方向における揉み玉24の位置および左右方向に作用する揉み玉24の押付力を調整する際の操作機器40の使い勝手を向上させることができる。
【0066】
・上記実施形態において、センサ部50をなぞったとき揉み玉24が上下方向に移動するが、これに代えて、センサ部50をなぞったとき揉み玉24を前後方向に移動させる構成を採用することもできる。
【0067】
・上記実施形態において、センサ部50をなぞったとき揉み玉24が左右方向に移動するが、これに代えて、センサ部50をなぞったとき揉み玉24を前後方向に移動させる構成を採用することもできる。
【0068】
・上記実施形態において、センサ部50は、操作機器40をなぞる動作、叩く動作、および長く押す動作を検出するが、操作力が作用する時間に基づいて、操作機器40のセンサ部50を複数回にわたり叩く動作を検出することもできる。また、上記実施形態においては、センサ部50を指で長く押したとき揉み玉24が前方に移動する構成であるが、これに代えて、センサ部50を複数回にわたり叩いたときに揉み玉24を前方に移動させる構成を採用することもできる。すなわち、制御部31は、例えば、所定時間においてセンサ部50に操作力が所定回数作用したとき、センサ部50を複数回にわたり叩く動作が検出されたと判定して、揉み玉24を前方に移動させる信号を第3駆動機構23に出力することもできる。また、所定時間においてセンサ部50を叩いた回数に応じて、揉み玉24の位置を調整する構成を採用することもできる。例えば、所定時間(例えば1秒)において2回にわたり叩く動作を検出したときに、揉み玉24を上方に移動させて、所定時間(例えば1秒)において3回にわたり叩く動作を検出したときに、揉み玉24を下方に移動させる構成を採用することもできる。また、複数回にわたり叩く動作の間隔に応じて、揉み玉24の位置を調整する構成を採用することもできる。
【0069】
・上記実施形態において、操作機器40をなぞる動作に基づいて上下方向における揉み玉24の位置が調整されるが、叩く動作、長く押す動作、または複数回にわたり叩く動作に基づいて上下方向における揉み玉24の位置を調整することもできる。また、叩く動作、長く押す動作、または複数回にわたり叩く動作に基づいて上下方向に作用する揉み玉24の押付力を調整することもできる。
【0070】
・上記実施形態において、操作機器40をなぞる動作に基づいて左右方向における揉み玉24の位置が調整されるが、叩く動作、長く押す動作、または複数回にわたり叩く動作に基づいて左右方向における揉み玉24の位置を調整することもできる。また、叩く動作、長く押す動作、または複数回にわたり叩く動作に基づいて左右方向に作用する揉み玉24の押付力を調整することもできる。
【0071】
・上記実施形態において、操作機器40を叩く動作および長く押す動作に基づいて前後方向における揉み玉24の位置が調整されるが、なぞる動作または複数回にわたり叩く動作に基づいて前後方向における揉み玉24の位置および押付力を調整することもできる。
【0072】
・上記実施形態において、操作機器40を叩く動作が検出されたとき揉み玉24の押付力を小さくする調整が行われるが、長く押す動作または複数回にわたり叩く動作が検出されたとき揉み玉24の押付力を小さくする調整を行う構成を採用することもできる。
【0073】
・上記実施形態において、操作機器40を長く押す動作が検出されたとき揉み玉24の押付力を大きくする調整が行われるが、叩く動作または複数回にわたり叩く動作が検出されたとき揉み玉24の押付力を大きくする調整を行う構成を採用することもできる。
【0074】
・上記実施形態において、報知部32は椅子10に設けられているが、操作機器40に報知部32を設けることもできる。例えば、人形型の操作機器40において、口に相当する部位を含む頭部43に報知部32を設けることもできる。
【0075】
・上記実施形態において、報知部32はセンサ部50の検出結果を聴覚的方法により報知するが、例えば、図12に示されるように、LED(Light Emitting Diode)32A,32Bにより報知部32を構成することもできる。LED32A,32Bは、例えば、椅子10の右肘掛け13Aに設けられる。LED32Aは、揉み玉24を上方に移動させるときに点灯する。LED32Bは、揉み玉24を下方に移動させるときに点灯する。すなわち、報知部32が視覚的方法によりセンサ部50の検出結果を報知する構成であっても、上記(6)に記載の効果を得ることができる。なお、LED32A,32Bは、椅子10以外に設けることもできる。すなわち、報知部32を、例えば、操作機器40、または押しボタンが設けられる従来の操作機器(図示略)に設けることもできる。また、スピーカとLEDとの組合せにより検出結果報知部を構成することもできる。
【0076】
・上記実施形態において、報知部32は揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを聴覚的方法により報知するが、上記検出結果報知部と同様に、LEDにより報知部32を構成することもできる。すなわち、報知部32が視覚的方法により揉み玉24の位置および押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを報知する構成であっても、上記(7)に記載の効果を得ることができる。また、スピーカとLEDとの組合せにより調整限界報知部を構成することもできる。
【0077】
・上記実施形態において、圧力センサ53は格子状に設けられているが、圧力センサ53の配置および個数を適宜変更することもできる。例えば、図13に示されるように、センサ基板51の四隅に圧力センサ53を設ける構成を採用することもできる。このような構成によれば、図7(b)に示すセンサ部50に比べて圧力センサ53の個数を減らすことで低コスト化を図ることができる。
【0078】
・上記実施形態において、上下方向および左右方向および前後方向における揉み玉24の位置を調整することができるが、上下方向および左右方向および前後方向のいずれか1つの方向のみにおける揉み玉24の位置を調整する構成を採用することもできる。また、上下方向および左右方向および前後方向のいずれか2つの方向における揉み玉24の位置を調整する構成を採用することもできる。
【0079】
・上記実施形態において、操作機器40を縦方向および横方向になぞる動作がセンサ部50により検出されるが、縦方向になぞる動作または横方向になぞる動作のみが検出される構成を採用することもできる。例えば、図14(a)に示されるように、2つの圧力センサ53を縦方向に並べることにより、縦方向になぞる動作のみをセンサ部50に検出させることもできる。また、図14(b)に示されるように、2つの圧力センサ53を横方向に並べることにより、横方向になぞる動作のみをセンサ部50に検出させることもできる。このような構成によれば、図7(b)および図13に示すセンサ部50に比べて圧力センサ53の個数を減らすことで低コスト化を図ることができる。
【0080】
・上記実施形態において、操作機器40は人の身体を模した形状を有するが、例えば、動物の身体を模した形状や、その他の形状を有する操作機器を採用することもできる。例えば、図15(a)に示されるように、操作部を、椅子式マッサージ機1において揉み玉24が設けられる部位を模した形状を有する操作機器60により構成することもできる。椅子式マッサージ機1を模した操作機器60は背もたれ相当部61を有する。背もたれ相当部61は、揉み玉24が設けられる部位である背もたれ12を模して形成されている。このような構成であっても、この背もたれ相当部61にセンサ部50を設けることにより、上記(2)に準じた効果を得ることができる。なお、センサ部50は、図15(a)中の前方から作用する力を検出するように構成することができる。また、センサ部50は、図15(a)中の後方から作用する力を検出するように構成することもできる。
【0081】
・上記実施形態において、操作機器40は身体を模した立体的形状を有するが、例えば、人もしくは動物の身体を模した形状、または、椅子式マッサージ機1において揉み玉24が設けられる部位を模した形状を操作機器上の平面で示すようにすることもできる。例えば、図15(b)に示されるように、操作部を、人の身体を模した形状が描かれた操作機器70により構成することもできる。このような構成であっても、身体を模した形状が描かれた操作機器70にセンサ部50を設けることにより、上記(2)に準じた効果を得ることができる。
【0082】
・上記実施形態において、センサ部50は圧力センサ53により構成されているが、その他のセンサによりセンサ部を構成することもできる。また、抵抗膜方式または静電容量方式等の一般的なタッチパネルによりセンサ部を構成することもできる。
【0083】
・上記実施形態において、使用者が腰掛ける椅子式マッサージ機1に本発明を適用しているが、その他のマッサージ機に本発明を適用することもできる。例えば、脚をマッサージするフットマッサージ機に本発明を適用することもできる。
【0084】
・上記実施形態において、施療子は揉み玉24であるが、施療子として揉み玉24以外のものを採用することができる。例えば、突起が形成された指圧棒等を施療子とすることもできる。
【符号の説明】
【0085】
1…椅子式マッサージ機(マッサージ機)、24…揉み玉(施療子)、31…制御部、32…報知部(検出結果報知部、調整限界報知部)、40…操作機器(操作部)、50…センサ部、60,70…操作機器(操作部)。
【特許請求の範囲】
【請求項1】
使用者の身体をマッサージする施療子と、前記使用者が前記施療子の動作を指定するための操作部と、前記操作部の操作に応じて前記施療子の動作を制御する制御部とを備えるマッサージ機において、
前記操作部は、外部から前記操作部に作用する力である操作力の大きさ、および前記操作力が作用する位置の変化の方向である操作方向の少なくとも一方を検出するセンサ部を有すること、
ならびに、前記制御部は、前記操作力が作用する時間または前記操作方向に基づいて、前記施療子の位置および前記施療子が前記身体を押す力である押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項2】
請求項1に記載のマッサージ機において、
前記操作部は、人の身体を模した形状、または動物の身体を模した形状、または前記マッサージ機において前記施療子が設けられる部位を模した形状を示すこと
を特徴とするマッサージ機。
【請求項3】
請求項1または2に記載のマッサージ機において、
前記センサ部は、前記操作方向に基づいて、前記操作部をなぞる動作を検出すること、
ならびに、前記制御部は、前記なぞる動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項4】
請求項1〜3のいずれか一項に記載のマッサージ機において、
前記センサ部は、前記操作力が作用する時間に基づいて、前記操作部を叩く動作を検出すること、
ならびに、前記制御部は、前記叩く動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項5】
請求項1〜4のいずれか一項に記載のマッサージ機において、
前記センサ部は、前記操作力が作用する時間に基づいて、前記操作部を長く押す動作を検出すること、
ならびに、前記制御部は、前記長く押す動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項6】
請求項1〜5のいずれか一項に記載のマッサージ機において、
前記センサ部は、前記操作力が作用する時間に基づいて、所定時間内において前記操作部を複数回にわたり叩く動作を検出すること、
ならびに、前記制御部は、前記複数回にわたり叩く動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項7】
請求項3に記載のマッサージ機、または請求項3を引用する請求項4〜6のいずれか一項に記載のマッサージ機において、
前記制御部は、前記操作部を縦方向になぞる動作が前記センサ部により検出されたとき、前記マッサージ機の上下方向における前記施療子の位置、および前記マッサージ機の上下方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項8】
請求項3に記載のマッサージ機、または請求項3を引用する請求項4〜7のいずれか一項に記載のマッサージ機において、
前記制御部は、前記操作部を横方向になぞる動作が前記センサ部により検出されたとき、前記マッサージ機の左右方向における前記施療子の位置、および前記マッサージ機の左右方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項9】
請求項4に記載のマッサージ機、または請求項4を引用する請求項5〜8のいずれか一項に記載のマッサージ機において、
前記制御部は、前記操作部を叩く動作が前記センサ部により検出されたとき、前記マッサージ機の前後方向における前記施療子の位置、および前記マッサージ機の前後方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項10】
請求項5に記載のマッサージ機、または請求項5を引用する請求項6〜9のいずれか一項に記載のマッサージ機において、
前記制御部は、前記操作部を長く押す動作が前記センサ部により検出されたとき、前記マッサージ機の前後方向における前記施療子の位置、および前記マッサージ機の前後方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項11】
請求項1〜10のいずれか一項に記載のマッサージ機において、
前記センサ部の検出結果を視覚的方法および聴覚的方法の少なくとも一方により報知する検出結果報知部を有すること
を特徴とするマッサージ機。
【請求項12】
請求項1〜11のいずれか一項に記載のマッサージ機において、
前記施療子の位置および前記施療子の押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを視覚的方法および聴覚的方法の少なくとも一方により報知する調整限界報知部を有すること
を特徴とするマッサージ機。
【請求項1】
使用者の身体をマッサージする施療子と、前記使用者が前記施療子の動作を指定するための操作部と、前記操作部の操作に応じて前記施療子の動作を制御する制御部とを備えるマッサージ機において、
前記操作部は、外部から前記操作部に作用する力である操作力の大きさ、および前記操作力が作用する位置の変化の方向である操作方向の少なくとも一方を検出するセンサ部を有すること、
ならびに、前記制御部は、前記操作力が作用する時間または前記操作方向に基づいて、前記施療子の位置および前記施療子が前記身体を押す力である押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項2】
請求項1に記載のマッサージ機において、
前記操作部は、人の身体を模した形状、または動物の身体を模した形状、または前記マッサージ機において前記施療子が設けられる部位を模した形状を示すこと
を特徴とするマッサージ機。
【請求項3】
請求項1または2に記載のマッサージ機において、
前記センサ部は、前記操作方向に基づいて、前記操作部をなぞる動作を検出すること、
ならびに、前記制御部は、前記なぞる動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項4】
請求項1〜3のいずれか一項に記載のマッサージ機において、
前記センサ部は、前記操作力が作用する時間に基づいて、前記操作部を叩く動作を検出すること、
ならびに、前記制御部は、前記叩く動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項5】
請求項1〜4のいずれか一項に記載のマッサージ機において、
前記センサ部は、前記操作力が作用する時間に基づいて、前記操作部を長く押す動作を検出すること、
ならびに、前記制御部は、前記長く押す動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項6】
請求項1〜5のいずれか一項に記載のマッサージ機において、
前記センサ部は、前記操作力が作用する時間に基づいて、所定時間内において前記操作部を複数回にわたり叩く動作を検出すること、
ならびに、前記制御部は、前記複数回にわたり叩く動作に基づいて、前記施療子の位置および前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項7】
請求項3に記載のマッサージ機、または請求項3を引用する請求項4〜6のいずれか一項に記載のマッサージ機において、
前記制御部は、前記操作部を縦方向になぞる動作が前記センサ部により検出されたとき、前記マッサージ機の上下方向における前記施療子の位置、および前記マッサージ機の上下方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項8】
請求項3に記載のマッサージ機、または請求項3を引用する請求項4〜7のいずれか一項に記載のマッサージ機において、
前記制御部は、前記操作部を横方向になぞる動作が前記センサ部により検出されたとき、前記マッサージ機の左右方向における前記施療子の位置、および前記マッサージ機の左右方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項9】
請求項4に記載のマッサージ機、または請求項4を引用する請求項5〜8のいずれか一項に記載のマッサージ機において、
前記制御部は、前記操作部を叩く動作が前記センサ部により検出されたとき、前記マッサージ機の前後方向における前記施療子の位置、および前記マッサージ機の前後方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項10】
請求項5に記載のマッサージ機、または請求項5を引用する請求項6〜9のいずれか一項に記載のマッサージ機において、
前記制御部は、前記操作部を長く押す動作が前記センサ部により検出されたとき、前記マッサージ機の前後方向における前記施療子の位置、および前記マッサージ機の前後方向に作用する前記施療子の押付力の少なくとも一方を相対的に調整すること
を特徴とするマッサージ機。
【請求項11】
請求項1〜10のいずれか一項に記載のマッサージ機において、
前記センサ部の検出結果を視覚的方法および聴覚的方法の少なくとも一方により報知する検出結果報知部を有すること
を特徴とするマッサージ機。
【請求項12】
請求項1〜11のいずれか一項に記載のマッサージ機において、
前記施療子の位置および前記施療子の押付力の少なくとも一方が相対的な調整可能範囲の限界に達していることを視覚的方法および聴覚的方法の少なくとも一方により報知する調整限界報知部を有すること
を特徴とするマッサージ機。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−63162(P2013−63162A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−203330(P2011−203330)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]