
マッサージ装置

【課題】 複数の載置姿勢に応じた複数の施療機構を備えるマッサージ装置において、使用中に他の施療機構が動作しないようにすると共に、操作性の向上を図ることができるマッサージ装置を提供する。
【解決手段】 マッサージ装置1は、複数の載置姿勢(第1〜第3姿勢)と、夫々の載置姿勢に対応した複数の施療機構3〜5とを備え、例えば施療機構3の動作中に他の施療機構4に対応する載置姿勢(第2姿勢)に姿勢が変更されると、施療機構3の動作が停止状態となるよう構成されている。
【解決手段】 マッサージ装置1は、複数の載置姿勢(第1〜第3姿勢)と、夫々の載置姿勢に対応した複数の施療機構3〜5とを備え、例えば施療機構3の動作中に他の施療機構4に対応する載置姿勢(第2姿勢)に姿勢が変更されると、施療機構3の動作が停止状態となるよう構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被施療者の身体部位を施療するマッサージ装置に関し、特に、複数の載置姿勢と、夫々の該載置姿勢に対応した複数の施療機構とを備えるマッサージ装置に関する。
【背景技術】
【0002】
従来、例えば被施療者の脚部を施療するマッサージ装置として、1台で複数の施療を実行可能なものが提案されている(例えば、特許文献1参照)。このマッサージ装置によれば、揉み施療、ローラ掛け施療、及び叩き施療という互いに根本的に異なる各施療を、脚部に対して選択的に実行可能であり、しかも、シンプルな構造となっていて低コストで実現可能なものが提案されている。
【特許文献1】特開2000−5254号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上記特許文献1によるマッサージ装置の場合、3種類の施療を実現する各施療機構が全て連動するようになっている。従って、ある1つの施療機構(例えば、揉み機構)により施療している間においても、その他の施療機構(例えば、ローラ掛け機構、叩き機構)も動作することとなる。一方、仮に夫々の施療機構を独立して動作可能に構成すると、各施療機構を操作するためのスイッチ類が多数必要となるため、操作性の向上を図ることが困難となってしまう。
【0004】
そこで本発明は、複数の載置姿勢に応じた複数の施療機構を備えるマッサージ装置において、使用中に他の施療機構が動作しないようにすると共に、操作性の向上を図ることができるマッサージ装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は上述したような事情に鑑みてなされたものであり、本発明に係るマッサージ装置は、複数の載置姿勢と、夫々の該載置姿勢に対応した複数の施療機構とを備え、一の施療機構の動作中に他の施療機構に対応する載置姿勢に姿勢が変更されると、前記一の施療機構の動作が停止状態となるよう構成されている。
【0006】
このような構成とすることにより、載置姿勢が変更されると、変更前に動作していた施療機構を停止状態とすることができると共に、姿勢変更前の施療機構を停止させるためにスイッチ類の操作をする必要がないため、操作性の向上が図れる。
【0007】
また、一の施療機構の動作中に他の施療機構に対応する載置姿勢に姿勢が変更されると、全ての施療機構の動作が停止状態となるよう構成されていてもよい。このような構成とすることにより、姿勢を変更した後、被施療者が意図するまで(即ち、次の施療を行おうと意図するまで)、全ての施療機構を停止状態としておくことができる。従って、意図せずマッサージ装置の載置姿勢が変更されてしまったとしても、全ての施療機構が停止するため、施療機構の動作によって不具合が生じることがない。
【0008】
また、前記施療機構の動作を制御する制御部と、載置姿勢を検出する姿勢検出センサとを更に備え、該姿勢検出センサから載置姿勢の変更を示す信号が検出されると、前記制御部は施療機構の動作を停止状態とするよう構成されていてもよい。このような構成とすることにより、姿勢の変更による施療機構の動作停止を具体的に実現することができる。
【0009】
また、前記施療機構を収容する筒状の筐体を更に備え、該筐体の周部に、前記施療機構による身体部位への施療位置が設定されていてもよい。このような構成とすることにより、筒状の筐体をその軸芯回りに転動し、載置姿勢を変更することにより、各載置姿勢に応じた複数の施療を体感することができる。また、筐体が筒状を成しているため、被施療者はマッサージ装置の姿勢を変更しやすいという利点もある。
【0010】
また、前記筐体は、外観視で略三角柱形状を成しており、各施療位置は、前記筐体の周部における頂部に設定されていてもよい。このような構成とすることにより、略三角柱形状の筐体における一側面を下方にして床面に載置でき、載置したときのより高い安定性を確保することができる。また、このように一側面を下方にして配置すると、筐体の周部における頂部が上方に位置することとなる。従って、この頂部に施療位置を設定することにより、身体部位を施療位置に容易に配置することができ、被施療者は該身体部位を施療しやすくなる。
【0011】
また、前記筐体における軸芯方向の端部には、各載置姿勢において床面に前記筐体を支持する支持部が設けられており、該支持部は、各施療機構よりも前記筒状の筐体の軸芯から離反する方向へ突出するよう構成されていてもよい。このような構成とすることにより、マッサージ装置が床面に載置されたときに、何れの載置姿勢であっても施療機構が床面と接触することがない。
【0012】
また、前記施療機構には、身体部位を揉み施療する揉み機構、身体部位を擦り施療する擦り機構、及び身体部位を往復動させて施療する往復機構のうち、少なくとも1つが含まれていてもよい。このような構成とすることにより、1台のマッサージ装置によって異なる3種類の施療を実現することができる。
【0013】
また、複数の前記施療機構を動作させるための複数のモータを備え、該モータは、前記筐体の両端側の夫々に離隔して配置されていてもよい。このような構成とすることにより、モータが収容された状態での筐体の重量バランスが良好となり、安定した載置姿勢をとることが可能となる。
【0014】
また、前記施療機構は、少なくとも前記往復機構を含み、該往復機構は、身体部位が載置されて往復動する載置部を有し、該載置部は可撓性素材により形成されていてもよい。このような構成とすることにより、載置部に身体部位を載せて施療するときの載せ心地が良好となる。また、上述したように床面に筐体を支持すべく突出した支持部を備える場合には、該支持部と往復動する載置部との間に身体部位が位置したとしても、載置部が可撓性を有するため、当該身体部位が強く挟まれるのを防止することができる。
【発明の効果】
【0015】
本発明によれば、複数の載置姿勢に応じた複数の施療機構を備えるマッサージ装置において、使用中に他の施療機構が動作しないようにすると共に、操作性の向上を図ることができるマッサージ装置を実現することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施の形態に係るマッサージ装置について、図面を参照しながら具体的に説明する。図1は、本発明の実施の形態に係るマッサージ装置を示す斜視図である。図1に示すように、マッサージ装置1は筒状であってより詳しくは外観視で略三角柱形状を成す中空の筐体2を備えている。筐体2内にはマッサージ装置1によって実行可能な複数の施療機構が収容されており、本実施の形態では、被施療者の身体部位を擦り施療する擦り機構3、揉み施療する揉み機構4、及び身体部位を往復動させるスライド機構(往復機構)5が収容されている(図2参照)。
【0017】
マッサージ装置1は、複数の載置姿勢をとることが可能になっており、具体的には、筐体2の3つの周面の夫々が下方に位置して床面に対向するよう配置される3つの載置姿勢(第1姿勢〜第3姿勢)をとることができる。そして、上述した3種類の施療機構3〜5と各載置姿勢とは一対一に対応しており、具体的には後述するが、一の載置姿勢のときに、これに対応する一の施療機構が動作可能となっている。
【0018】
また、マッサージ装置1の一方の側部には、外部電源から電力の供給を受けるためのコード(図示せず)を巻き取るコードリール6が設けられている。以下では、説明の便宜上、マッサージ装置1の全体においてこのコードリール6が設けられている側を左側、その反対側を右側として説明することとする。なお、本実施の形態に係るマッサージ装置1は、主に被施療者の脚部(大腿部、下腿部、足首から先の足部を含む)を施療対象とするものであるが、これに限られず、腕部(肩から指先に至るまでの身体部位)や他の部位を対象とするものであってもよい。
【0019】
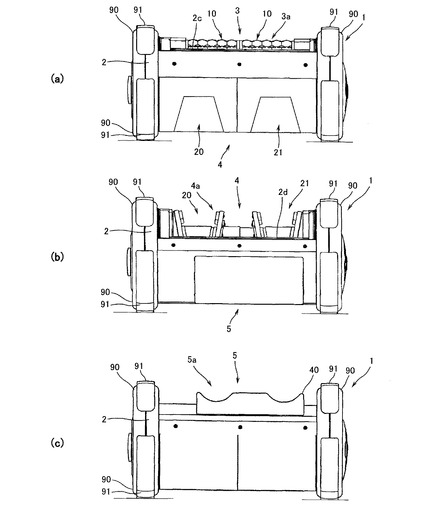
図2は、図1に示すマッサージ装置1の各載置姿勢での正面図を示しており、(a)は擦り機構3が動作可能な第1姿勢でのマッサージ装置1、(b)は揉み機構4が動作可能な第2姿勢でのマッサージ装置1、(c)はスライド機構5が動作可能な第3姿勢でのマッサージ装置1を夫々示している。図2(a)に示すように、第1姿勢でのマッサージ装置1は、筐体2の上部に擦り機構3による身体部位への施療位置3aが設定され、第2姿勢でのマッサージ装置1は、筐体2の上部に揉み機構4による身体部位への施療位置4aが設定され、第3姿勢でのマッサージ装置1は、筐体2の上部にスライド機構5による身体部位への施療位置5aが設定されている。以下、各施療機構3〜5について順に詳述する。
【0020】
[擦り機構]
図3は、擦り機構3の構成を示す正面図である。図3に示すように、擦り機構3は指圧玉11a,12aを有する長寸の第1施療部10を2つ備えており、この2つの第1施療部10,10は左右に直列接続されている。
【0021】
より詳しくは、第1施療部10は左右で対向配置された支持円盤13と、これらの支持円盤13,13間に架設された指圧棒11,12とから構成されている。一方の指圧棒11は、その長手方向に沿って規則的に径が拡縮した構成となっており、大径部分が指圧玉11aを成している。他方の指圧棒12も同様に、その長手方向に沿って規則的に径が拡縮した構成となっており、大径部分が指圧玉12aを成している。更に、指圧棒12の場合、複数の指圧玉12a毎に若干だけ更に大径の指圧玉12aが設けられており、本実施の形態に係るマッサージ装置1にあっては、3つの指圧玉12aのうち1つが他の2つより若干大径に構成されている。なお、指圧玉11a,12aでは、指圧玉11aの方が大径となっている。
【0022】
この指圧棒11,12は、対向配置された2つの支持円盤13,13における対向面の周縁部近傍にて両端部が接続されている。そして、指圧棒11,12は、支持円盤13の周方向に沿って交互に複数配設され、本実施の形態では夫々4本ずつ配設されている。擦り機構3は、このような構成の2つの第1施療部10が、中心軸を左右方向に一致させた状態で同軸状に設けられ、夫々が有する一方(左右方向の中央側)の支持円盤13の外面同士が接続されることによって、直列に接続されている。
【0023】
支持円盤13の中心位置には左右方向への貫通孔(図示せず)が形成されており、ここには回転シャフト14が挿通されて支持円盤13に固定されている。回転シャフト14の左側の端部14aは、左側の第1施療部10の支持円盤13を貫通して外側方へ延びており、軸受部15を介して筐体2の左側壁2aに回転自在に支持されている。回転シャフト14の右側の端部14bは、右側の第1施療部10の支持円盤13を貫通して外側方へ延びており、別の軸受部15を介して筐体2の右側壁2bに回転自在に支持されている。
【0024】
左側の第1施療部10が有する左側の支持円盤13と左側の軸受部15との間には、大径の従動ギヤ16aが配設され、該従動ギヤ16aは回転シャフト14に対して同軸的に固定されている。一方、筐体2内には第1モータ17が搭載されており、該第1モータは、筐体2の左側壁2aに図示しないブラケットを介して支持されている。該第1モータ17は出力軸17aを筐体2の左側壁2aに向けて配設され、その端部には小径の駆動プーリ18aが取り付けられている。この駆動プーリ18aは、筐体2の左側壁2aに回転自在に支持された大径の従動プーリ18bと、ベルト18cを介して接続されている。また、従動プーリ18bには、上記従動ギヤ16aに比べて小径の駆動ギヤ16bが同軸状にして一体的に取り付けられており、この駆動ギヤ16bと従動ギヤ16aとは互いに噛合している。
【0025】
このような構成によれば、第1モータ17が駆動して出力軸17aが一方向へ回転すると、プーリ18a,18b及びギヤ16a,16bを介してその回転が回転シャフト14へ伝達される。その結果、回転シャフト14と共に第1施療部10,10は一方向へ回転する。また、第1モータ17の出力軸17aが他方向へ回転すると、回転シャフト14と共に第1施療部10,10は他方向へ回転する。
【0026】
ところで、図2(a)に示すように、第1姿勢のマッサージ装置1では、筐体2の上部に、平面視で長方形状を成して左右方向へ長寸の開口2cが形成されている。上述した擦り機構3は、筐体2内に収容されたとき、第1施療部10,10の上部がこの開口2cから外方に露出されるようになっている。従って、第1姿勢のマッサージ装置1の上部に被施療者の脚部を載せ、擦り機構3を駆動すると、第1施療部10,10が回転駆動し、指圧玉11a,12aが脚部を擦るようにして施療する。なお、実際には開口2cを覆うように外部から布製のカバー(図示せず)が取り付けられるため、脚部に対して指圧玉11a,12aはこのカバーを介して接触することとなる。
【0027】
なお、図3では擦り機構3が直列接続された2つの第1施療部10,10を備える構成について示したが、これに限られず、より長寸を成す1つの第1施療部によって構成してもよい。即ち、図3において左右方向の中央にて互いに接続された2つの支持円盤13,13を省き、左右の第1施療部10,10が備える指圧棒11,12を連結したような構成としてもよい。また、第1施療部10として、指圧棒11,12のうち何れか一方のみを備えるものであってもよいし、或いは、上述した説明と異なる構成の指圧棒を備えていてもよい。
【0028】
[揉み機構]
図4は、揉み機構4の構成を示す正面図であり、図5は、図4に示す揉み機構4へ動力を伝達する動力伝達機構を示す図面である。図4に示すように、揉み機構4は左右の脚部が挟み入れられる左右の第2施療部20,21を備えており、左側の第2施療部20は、左脚の外側部を押圧する外側押圧部22と、左脚の内側部を押圧する内側押圧部23とを有している。
【0029】
外側押圧部22は、左右方向に延びる筒状の中空軸24と、該中空軸24の左端部に設けられた円盤状の押圧円板25とを有している。押圧円板25はその中心部にて中空軸24に一体的に接続されており、且つ、中空軸24の軸芯4cと押圧円板25の軸芯とが所定の角度(例えば、10度)を形成するように、中空軸24に対して押圧円板25は配向されている。また、押圧円板25において左脚の外側部に対向する面25aには、合成樹脂製の施療突起25bが、押圧円板25の周方向に沿って複数取り付けられている。
【0030】
内側押圧部23は、左右方向に延びる筒状の中空軸26と、該中空軸26の長手方向の中央部分に設けられた円盤状の押圧円板27とを有している。押圧円板27はその中心部にて中空軸26に一体的に接続されており、且つ、中空軸26の軸芯と押圧円板27の軸芯4cとが所定の角度(例えば、10度)を形成するように、中空軸26に対して押圧円板27は配向されている。また、押圧円板27において左脚の内側部に対向する面27aには、合成樹脂製の施療突起27bが、押圧円板27の周方向に沿って複数取り付けられている。
【0031】
外側押圧部22が有して押圧円板25から右方向へ延びる中空軸24は、内側押圧部23が有する中空軸26のうち押圧円板27から左方向(揉み機構4の外方)へ延びる部分26aよりも、内径寸法が大きくなっており、中空軸24の内部に、中空軸26の前記部分26aは嵌挿されている。従って、内側押圧部23は左右方向へ移動可能であって、外側押圧部22に対して内側押圧部23は接近及び離反することができるようになっている。
【0032】
右側の第2施療部21は、上述した左側の第2施療部20と左右対称な構成となっており、外側押圧部22及び内側押圧部23を備えている。但し、右側の第2施療部21の内側押圧部23が有する中空軸26のうち、押圧円板27より左側(揉み機構4の中央側)の部分26bは、左側の第2施療部21の内側押圧部23が有する中空軸26のうち、押圧円板27より右側(揉み機構4の中央側)の部分26cの内径寸法よりも小さくなっている。そして、右側の前記部分26cは左側の前記部分26bの内部に嵌挿されており、左右の内側押圧部22,22は、互いに接近及び離反が可能なように左右方向へ移動可能となっている。
【0033】
また、左右の第2施療部20,21が有する外側押圧部22の押圧円板25の外側方には、スペーサ28,28が配設されている。このスペーサ28は、押圧円板25より若干小径の円筒部材を、その一端を斜めに切断したような構成となっており、押圧円板25の外側方の隙間を埋めるためのものである。同様に、左右の第2施療部20,21が有する内側押圧部23の押圧円板27,27の間には、スペーサ29,29が配設されている。このスペーサ29も、押圧円板27より若干小径の円筒部材を、その一端を斜めに切断したような構成となっており、押圧円板27,27間の隙間を埋めるためのものである。更に、左側のスペーサ29の内径は右側のスペーサ29の外径より若干大きい寸法を有しており、右側のスペーサ29は左側のスペーサ29内に一部が挿通された状態で軸芯4cに沿った方向へスライド移動可能になっている。
【0034】
中空軸24,26の内部空間には、左右の第2施療部20,21を回転させるための回転シャフト30が設けられており、該回転シャフト30は、各中空軸24,26とスプライン結合している。従って、中空軸24,26は、回転シャフト30の軸芯に沿った左右方向へは回転シャフト30とは独立して可動である一方、回転シャフト30の周方向へは該回転シャフト30と一体でのみ回転可能になっている。なお、外側押圧部22と内側押圧部23とを回転シャフト30に挿通するに際し、各押圧円板25,27の中心軸の軸芯4cに対する傾斜方向が互いに逆になるようにしている。従って、対向配置された押圧円板25,27の離隔距離は、小さい部分と大きい部分とが存在するようになっている。
【0035】
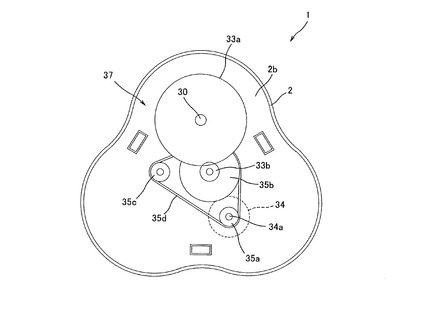
回転シャフト30の左端部は、筐体2の左側壁2aに設けられた軸受部32によって回転自在に支持されており、右端部近傍も、筐体2の右側壁2bに設けられた軸受部32によって回転自在に支持されている。そして、回転シャフト30の右端部であって、上記軸受部32よりも右側壁2bから右側方(外側方)へ突出した部分には、回転シャフト30と同軸状に大径の従動ギヤ33aが取り付けられている(図5も参照)。
【0036】
図5に示すように、筐体2の右側には第2モータ34が図示しないブラケットを介して取り付けられており、該第2モータ34の出力軸34aは、筐体2の右側壁2bを貫通して外方へ突出している。この出力軸34aの右端部には小径の駆動プーリ35aが取り付けられており、該駆動プーリ35aは、筐体2の右側壁2bの略中央部分にて回転自在に支持された大径の従動プーリ35bと、その近傍にて同様に右側壁2bに回転自在に支持された小径の従動プーリ35cとの間で、ベルト35dを介して接続されている。
【0037】
大径の従動プーリ35bの右側(図5における紙面手前側)には、小径の駆動ギヤ33bが、従動プーリ35bと同軸状であって且つ間に図示しないクラッチを介して設けられている。そして、この駆動ギヤ33bが、上記回転シャフト30の右端部に設けられた大径の従動ギヤ33aと噛合している。なお、前記クラッチは、従動プーリ35bが一方向へ回転した場合にその回転を駆動ギヤ33bへ伝達するが、従動プーリ35bが他方向へ回転した場合にはその回転を駆動ギヤ33bへ伝達しないようになっている。
【0038】
従って、第2モータ34が駆動して出力軸34aが一方向へ回転すると、その回転動力は駆動プーリ35a、ベルト35d、従動プーリ35b、駆動ギヤ33b、及び従動ギヤ33aから成る動力伝達機構37を通じて回転シャフト30へ伝達され、これを回転させる。回転シャフト30が回転すると、これとスプライン結合された第2施療部20,21が一体的に回転する。また、第2モータ34が駆動して出力軸34aが他方向へ回転した場合には、上記クラッチの作用により、第2モータ34の回転は回転シャフト30へ伝達されず、第2施療部20,21は回転しないため、揉み機構4は動作しない。
【0039】
また、第2施療部20,21が有する左右の押圧円板25,27間に脚部を位置させた状態で第2モータ34を駆動した場合には、これら押圧円板25,27が脚部の外側部及び内側部に接触した状態で回転する。そして、押圧円板25,27の中心軸は軸芯4cに対して所定の角度だけ傾斜しているため、回転に伴って左右の押圧円板25,27は、脚部に対して接近及び離反を繰り返すこととなり、この動作が脚部に対する揉み動作となる。
【0040】
また、第2施療部20,21の内側押圧部23,23は、回転シャフト30に沿って左右へスライド可能であるため、被施療者の脚部寸法の違いに対応して、外側押圧部22からの距離、即ち、外側押圧部22の押圧円板25と内側押圧部23の押圧円板27との離隔距離が変更されるようになっている。更に、図4に示すように、中央のスペーサ29,29の内部空間において押圧円板25,27間には付勢手段たるスプリングバネ38が取り付けられている。このスプリングバネ38は、左右の押圧円板25,27を左右方向の外側へ(即ち、両者が離反する方向へ)付勢する。従って、スプリングバネ38の付勢力により生じる適切な押圧力によって、押圧円板25,27が被施療者の脚部に押し当てられることとなる。
【0041】
ところで、図2(b)に示すように、第2姿勢のマッサージ装置1では、筐体2の上部に、平面視で長方形状を成して左右方向へ長寸の開口2dが形成されている。上述した揉み機構4は、筐体2内に収容されたとき、第2施療部20,21のうち略上半分の部分が、この開口2dから外方に露出されるようになっている。従って、第2姿勢のマッサージ装置1の上部に被施療者が脚部を載せ、揉み機構4を駆動すると、第2施療部20,21が回転駆動し、対向配置された押圧円板25,27が脚部を左右から揉むようにして施療する。また、押圧円板25,27には施療突起25b,27bが取り付けられているため、この施療突起25b,27bによって脚部を効果的に揉みほぐすことが可能である。なお、実際には図2(b)に示した開口2d部分に、第2施療部20,21の露出部分の形状に合った布製のカバー(図示せず)が被せられることとなるため、脚部に対して押圧円板25,27や施療突起25a,27aは、このカバーを介して接触することとなる。
【0042】
[スライド機構]
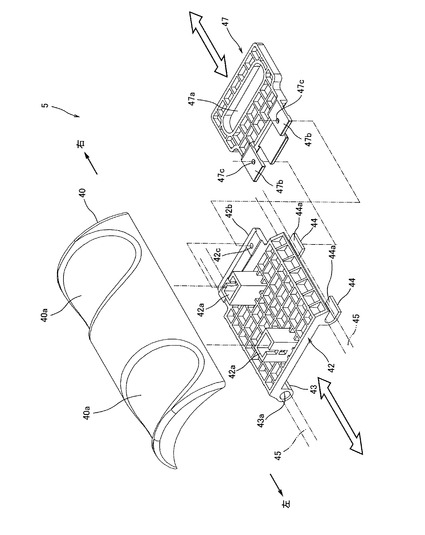
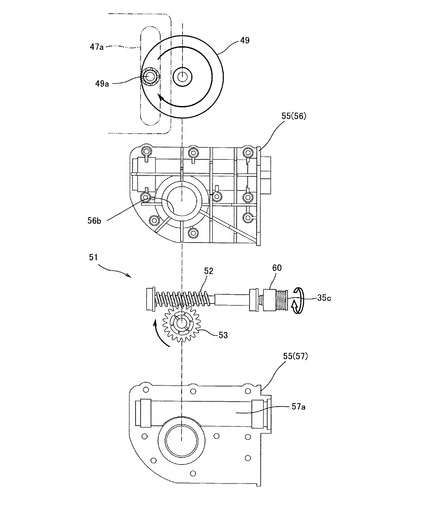
図6は、スライド機構5の構成を示す斜視図であり、図7は図6に示すスライド機構5の一部分についての分解斜視図、図8は図6に示すスライド機構5の他の部分についての分解平面図である。
【0043】
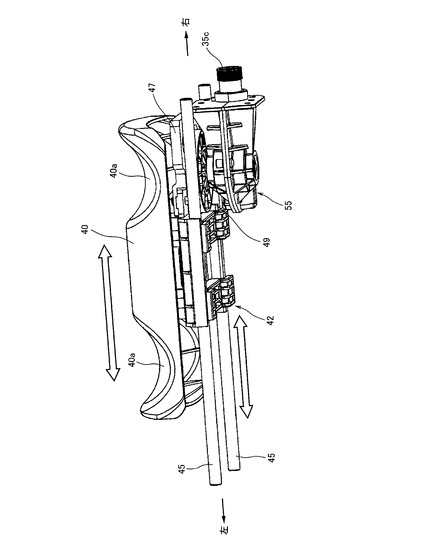
図6及び図7に示すように、スライド機構5は被施療者の脚部が載置される脚載置部40を備えている。この脚載置部40は可撓性を有する合成樹脂製であり、筒状部材を軸芯に沿って半分だけ切除したような概略形状を成し、軸芯を左右方向に沿うようにして配設されている。脚載置部40の上部には左右の脚部を支持する凹部40aが左右に形成されている。
【0044】
脚載置部40の下部には、左右方向へスライド可能なスライダ42が接続されている。このスライダ42は、平面視で略矩形板状を成してその上面には縦横に延びる複数のリブが突設され、左右の2箇所には上方へ延びる筒状接続部42aが設けられている。脚載置部40の下面からは、スライダ42の筒状接続部42aに嵌挿される棒状の嵌挿部(図示せず)が下方へ延びており、筒状接続部42aにこの嵌挿部が嵌め入れられることによって、脚載置部40はスライダ42の上部に固定される。また、スライダ42の右端部には矩形状のフランジ42bが設けられており、該フランジ42bには、上下方向へ貫通する2つのボルト孔42cが形成されている。
【0045】
また、脚載置部40の下方には、左右方向へ延びる2本のガイドポール45が設けられている。該ガイドポール45は、両端が筐体2の左側壁2aと右側壁2bとに夫々固定された状態で前後に並設されており、上記スライダ42は、このガイドポール45に沿って左右へスライド可能になっている。
【0046】
即ち、図7に示すように、スライダ42の後部左右(即ち、矩形板状を成すスライダ42において、ガイドポール45に沿って延びる一方の端辺の左右部分)の下部には、一方(後側)のガイドポール45に支持されるポール支持部43が設けられ、該ポール支持部43には左右方向へ貫通したガイド孔43aが形成されている。また、スライダ42の前部左右(即ち、スライダ42において、ガイドポール45に沿って延びる他方の端辺の左右部分)の下部には、他方(前側)のガイドポール45に支持されるポール支持部44が設けられ、該ポール支持部44には左右方向及び前方へ開口して凹状を成すガイド受部44aが形成されている。従って、ガイド孔43aに後側のガイドポール45が挿通され、ガイド受部44aにて前側のガイドポール45が受けられることにより、スライダ42は前後のガイドポール45に支持される。そして、この状態でスライダ42は、ガイドポール45に沿って左右方向へスライド可能となっている。
【0047】
スライダ42の右側方には、回転運動を直線的な往復運動に変換するための変換部材47が設けられている。この変換部材47は平面視で略矩形板状を成しており、スライダ42と同様に縦横へ延びる複数のリブが突設されている。また、変換部材47の左端部にはフランジ47bが設けられており、該フランジ47bには上下方向へ貫通する2つのボルト孔47cが形成されている。スライダ42と変換部材47とは、互いのフランジ42b,47bが上下に重ねられ、同心状に配設されたボルト孔42c,47cへボルト(図示せず)が挿通されることによって互いに接続されている。また、変換部材47の略中央には、前後方向へ延びて上下方向に貫通する長孔47aが形成されている。
【0048】
図8の平面図に示すように、変換部材47(図8ではその一部を平面視した構成を二点鎖線で示す)の下方には、平面視で円盤状を成すクランク49が配設されている。このクランク49の周縁部の上面には、上方へ突設されたボス部49aが設けられており、該ボス部49aは変換部材47の長孔47aに下方から挿通される。
【0049】
クランク49の下方には、回転運動の向きを変換するギヤユニット51と、このギヤユニットを収納するギヤケース55とが配設されている。ギヤユニット51は、左右方向へ軸芯が向けられたウォーム52と、該ウォーム52に噛合する平歯車53とから構成されており、ウォーム52の右端部には、既に説明した従動プーリ35c(図5参照)が同軸状にして一方向クラッチ60を介して接続されている。
【0050】
ギヤケース55は上下割りになっており、上側ケース56と下側ケース57とから構成されている。上側ケース56と下側ケース57とは略上下対象の構成になっており、互いの対向面に、ウォーム52と平歯車53とが収められる凹部57a(上側ケース56の凹部は図示を省略する)が形成されている。そして、上側ケース56と下側ケース57とが接続され、周部がボルト締結された場合に、夫々の凹部57aによって形成されるスペースに、従動プーリ35cが外部へ突出した状態で上記ギヤユニット51が収容されている。更に、上側ケース56に形成された上下方向の貫通孔56bを通じて、平歯車53とクランク49とが同軸状に接続されている。
【0051】
なお、揉み機構4の説明において既に言及したように、ウォーム52に接続された従動プーリ35cは、第2モータ34の出力軸34aに取り付けられた駆動プーリ35aに、ベルト35dを介して接続されている。
【0052】
このような構成のスライド機構5は、揉み機構4を駆動した第2モータ34によって駆動され、上述したように第2モータ34の出力軸34aが一方向へ回転すると揉み機構4が駆動するが、出力軸34aが他方向へ回転するとスライド機構5が駆動するようになっている。
【0053】
より詳述すると、図5に示すように、第2モータ34が駆動して出力軸34aが他方向へ回転すると、大径の従動プーリ35bと小径の従動プーリ35cとが回転するが、従動プーリ35bの回転は駆動ギヤ33bへは伝達されず、揉み機構4は動作しない。一方、従動プーリ35cの回転はウォーム52及び平歯車53を介してクランク49へ伝達され、クランク49を回転させる。クランク49が回転すると、ボス部49a及び長孔47aを介してジョイントされた変換部材47は左右方向へ往復移動し、回転運動が直線運動に
変換される。
【0054】
変換部材47が往復移動すると、これに接続されたスライダ42は、ガイドポール45に沿って左右方向へスライドし、スライダ42の上部に接続された脚載置部40も左右方向へスライドすることとなる。従って、脚載置部40の凹部40aにて脚部が支持された状態でスライド機構5が動作すると、脚載置部40の往復動作に伴って被施療者の脚部は股関節を中心にして左右へ揺動され、このような運動は股関節の施療に有効である。
【0055】
なお、この脚載置部40がスライドする往復距離は、クランク49の回転中心からボス部49aまでの距離に等しい。また、第2モータ34の出力軸34aが一方向へ回転した場合は、一方向クラッチ60の作用により、従動プーリ35cの回転はウォーム52へ伝達されず、スライド機構5は動作しないようになっている。また、図2(c)に示すように、第3姿勢のマッサージ装置1では、筐体2の上部にスライド機構5による施療位置5aが設定されており、脚載置部40のみが筐体2の外部に露出されている。
【0056】
また、これまでに説明した施療機構3〜5のうち、揉み機構4とスライド機構5とは同じ第2モータ34によって駆動されるため、各施療機構4,5を別々のモータで駆動する場合に比べて重量物であるモータの数を低減することができ、マッサージ装置1の軽量化が図れている。また、マッサージ装置1は施療機構3〜5を駆動するために合計2つのモータ17,34を備え、これらのモータ17,34は筐体2内の左右に分かれて配設されている。このように、比較的重量物であるモータ17,34が両側方に位置しているため、マッサージ装置1の重量バランスは良好に確保されている。
【0057】
ところで、本実施の形態に係るマッサージ装置1は、脚載置部40と支持部90との間に物体が挟まったことを検知する接触センサ78(図9参照)を備えているため、物体が挟まった状態のまま、スライド機構5が継続して動作するのを防止できるようになっている。即ち、この接触センサ78は、支持部90において脚載置部40に対向する面などに適宜設けられており、後述する図9に示すように制御部70に接続され、脚載置部40と支持部90との間に物体が挟まったことを検知すると、その検知信号を制御部70へと出力するように構成されている。そして、制御部70は、この検知信号を受信すると第2モータ34を停止させる。従って、脚載置部40と支持部90との間に物体が挟まったとしても、第2モータ34の停止によって脚載置部40の動作が中止されるため、物体が挟まった状態のままでスライド機構5が継続的に動作するのを防止することができる。
【0058】
[姿勢検出]
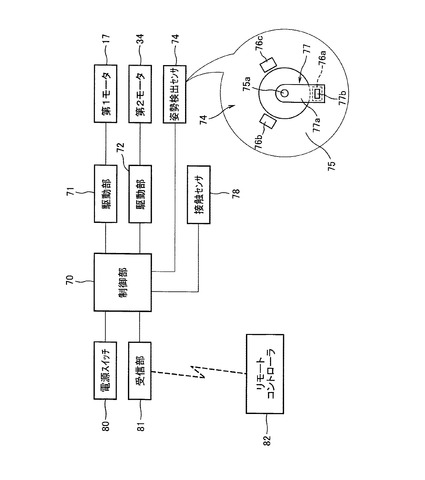
図9は、上述したような構成のマッサージ装置1の機能を示す模式的なブロック図である。図9に示すように、マッサージ装置1は制御部70を備えており、該制御部70は筐体2(図1参照)内に収容されている。制御部70は、既に説明した第1モータ17及び第2モータ34と、駆動部71,72を介して夫々接続されている。従って、制御部70からの制御信号により駆動部71,72は所定の電気信号を出力し、第1モータ17及び第2モータ34はこの電気信号に基づいて個別に駆動制御される。そして、第1モータ17の駆動によって擦り機構3が動作し、第2モータ34の駆動によって揉み機構4とスライド機構5とが選択的に動作する。
【0059】
また、制御部70には姿勢検出センサ74が接続されている。この姿勢検出センサ74は、マッサージ装置1の姿勢(第1〜第3姿勢)を検出するものであり、図9中に模式的に例示するように近接スイッチによって構成されている。より詳述すると、姿勢検出センサ74は、基板75上に取り付けられた3つの磁気センサ76a〜76cと、回転磁片77とを有している。3つの磁気センサ76a〜76cは、所定点75aを中心とする同心円に沿って等間隔(即ち、120度間隔)で配設されており、各磁気センサ76a〜76cは第1〜第3姿勢に対応している。また、回転磁片77は、所定点75aに回転自在に支持された旋回部材77aと、該旋回部材77aの先端(所定点75aから離隔した端部)に取り付けられた磁石77bとから構成されており、この磁石77bは、旋回部材77aが回転したときに、その回転軌道(前記同心円と一致)の途中で3つの磁気センサ76a〜76cと対向するようになっている。
【0060】
このような姿勢検出センサ74は、マッサージ装置1の左側壁2a近傍にて、旋回部材77aの回転軸芯が左右方向と一致するようにして取り付けられている。そして、旋回部材77aは、マッサージ装置1が第1〜第3姿勢の何れであるかに拘らず、自重によって磁石77bが所定点75aに対して鉛直下方に位置するようになっている。従って、マッサージ装置1が第1姿勢をとっているときは、磁気センサ76aが磁石77bに対向するよう位置し(図9の状態)、磁石77bが発生する磁気を検出してマッサージ装置1が第1姿勢をとっている旨の信号を制御部70へ出力する。
【0061】
同様に、マッサージ装置1が第2姿勢をとっているときは、磁気センサ76bが磁石77bに対向するよう位置し、磁気センサ76bは、第2姿勢をとっている旨の信号を制御部70へ出力する。マッサージ装置1が第3姿勢をとっているときは、磁気センサ76cが磁石77bに対向するよう位置し、磁気センサ76cは、第3姿勢をとっている旨の信号を制御部70へ出力する。
【0062】
制御部70は、姿勢検出センサ74からのこれらの信号に基づき、マッサージ装置1が第1〜第3の何れの姿勢をとっているか判断すると共に、これらの信号の入力が途切れるか、又は別の信号に切り替わった場合に、姿勢が変更されたと判断する。制御部70は、姿勢が変更されたと判断した場合には、動作中であるか否かに拘らず、施療機構3〜5の全てについて動作を停止させるよう制御する。例えば、第1姿勢において擦り機構3が動作している間に第2姿勢へと変更されると、擦り機構3を含む全ての施療機構3〜5の動作が停止状態とされる。
【0063】
なお、上述した説明では、姿勢が変更された場合に全ての施療機構3〜5が停止状態となるよう制御される場合について説明したが、これに限られない。姿勢が変更された場合に、変更前の施療機構(例えば、擦り機構3)は停止状態とする一方、変更後の姿勢(例えば、第2姿勢)に対応する施療機構(例えば、揉み機構4)の動作を開始するように制御してもよい。
【0064】
このような構成とすることにより、一の姿勢での施療後、他の姿勢で施療を行おうとする場合に、一の姿勢での施療機構の動作を停止させるための操作を別途行う必要がなく、操作性の向上を図ることができる。また、これに伴ってマッサージ装置1のスイッチ類の数を減らすことができるため、マッサージ装置1の低コスト化が可能である。
【0065】
ところで、後述するように、スライド機構5は一対の支持部90,90間に配設され、この支持部90,90間を脚載置部40が往復動する(図1参照)。そして、この支持部90には、脚載置部40との間に何らかの物体が挟まった場合は、既に説明したように脚載置部40が可撓性を有するため、この脚載置部40が撓むことによってマッサージ装置1又は物体の損傷等を回避できるようになっている。
【0066】
また、既に説明したように、本実施の形態に係るマッサージ装置1は接触センサ78を備えている。そして、この接触センサ78が脚載置部40と支持部90との間に物体が挟まったことを検知すると、その検知信号は制御部70へ出力される。制御部70は、この検知信号に基づいて駆動部72へ制御信号を出力し、第2モータ34を停止させる。従って、脚載置部40と支持部90との間に物体が挟まった場合、これを検知して第2モータ34を停止させ、脚載置部40の動作を中止させることが可能である。
【0067】
一方、図9に示すように、制御部70には電源スイッチ80が接続され、これを操作することにより、家庭に備えられている商用電源から電源ケーブル(図示せず)を通じて供給される電力を、制御部70及び駆動部71,72へ入電するか否かについて切り換えることができる。更に、制御部70には赤外線による信号を受信可能な受信部81が接続されており、リモートコントローラ82から発せられる赤外線信号を受信し、これを制御部70へ入力できるようになっている。
【0068】
[リモートコントローラ]
図10は、図9に示したリモートコントローラ82の外観平面図である。リモートコントローラ82は、比較的厚みのある円盤状の本体部82aを有し、その上面には5つのスイッチ83a〜83eが配設されている。これらのスイッチ83a〜83eを押すことにより、図示しない出力部から赤外線の信号を発することができ、この信号はマッサージ装置1の受信部81にて受信され、制御部70へ入力される。
【0069】
各スイッチ83a〜83eについて具体的に説明すると、本体部82aの中央にはオンオフスイッチ83aが設けられている。このスイッチ83aは、これを押すことにより、施療機構3〜5のうちマッサージ装置1がとっている姿勢に対応した施療機構を動作させ、又は停止させることが可能である。図9においてスイッチ83aの右斜め上方にはスピードアップスイッチ83bが設けられ、左斜め上方にはスピードダウンスイッチ83cが設けられている。これらのスイッチ83b,83cは、施療機構3〜5の動作速度を調整するためのものであり、スイッチ83bを押すたびに動作速度は増し、スイッチ83cを押すたびに動作速度は減じられる。
【0070】
また、スイッチ83aの右斜め下方と左斜め下方とには、擦り機構3が有する第1施療部10の回転方向を決定する第1ローラスイッチ83dと第2ローラスイッチ83eとが設けられている。このうちスイッチ83dを押すと第1施療部10は一方向へ回転し、スイッチ83eを押すと第1施療部10は他方向へ回転する。
【0071】
このように本実施の形態では、上述したようにマッサージ装置1が、姿勢の変更によって施療機構3〜5が自動的に停止されるように構成されているため、リモートコントローラ82には、上記のような5つのスイッチ83a〜83eを備えるだけでよい。従って、リモートコントローラ82の操作(マッサージ装置1の操作)が簡単であり、該リモートコントローラ82の小型化を図ることも可能である。このリモートコントローラ82は小型化されているため、本実施の形態では、マッサージ装置1の右端面に着脱可能に装着されている。
【0072】
[床面支持構造]
ところで、図1に示すようにマッサージ装置1は、既に説明したように外観視で略三角柱形状を成している。そして、その長手方向の端部には、マッサージ装置1を床面に載置したときに該床面に接触してマッサージ装置1を支持する支持部90が設けられている。より詳しく説明すると、筐体2における軸芯1aに沿った方向(左右方向)の端部であって、略三角柱形状を成す筐体2の各頂部には、筐体2の周面よりも外方(軸芯1aから離反する方向)へ突出した支持部90が設けられている。従って、筐体2の一方の端部には周方向に沿って3つの支持部90が等間隔で設けられ、他方の端部にも周方向に沿って3つの支持部90が等間隔で設けられている。
【0073】
また、各頂部の両端部に設けられた一対の支持部90間には、施療機構3〜5の何れか対応する一つが配設されており、前記一対の支持部90は、間に位置する施療機構3〜5よりも外方へ突出している。これらの支持部90は、側面視すると外周が円弧状となっており、その端面には合成樹脂製の滑り止め91が貼付されている。
【0074】
このようなマッサージ装置1が第1〜第3姿勢で床面に載置された状態は図2に示されており、各姿勢においてマッサージ装置1は、左右各2つ(即ち、合計4つ)の支持部90によって床面上に支持されている。またこのとき、支持部90は施療機構3〜5よりも外方へ突出しているため、施療機構3〜5が床面に直接的に接触するのを回避することができる。更に、支持部90の端面に貼付された滑り止め91により、マッサージ装置1は床面に対して安定的に載置される。
【0075】
また、図1に示すように、マッサージ装置1の左右の端面には、各支持部90の近傍に凹状に窪んだ把持部92が形成されている。従って、マッサージ装置1を運んだり、姿勢を変更させるに際して被施療者は、この把持部92と支持部90の端面とを挟むようにして掴んで持上げることができる。また、支持部90の端面に貼付した滑り止め91は、このように持上げる場合においては人手に対する滑り止め効果を発揮することとなる。
【産業上の利用可能性】
【0076】
本発明は、複数の載置姿勢に応じた複数の施療機構を備えるマッサージ装置において、使用中に他の施療機構が動作しないようにすると共に、操作性の向上を図ることができるマッサージ装置に適用することができる。
【図面の簡単な説明】
【0077】
【図1】本発明の実施の形態に係るマッサージ装置を示す斜視図である。
【図2】図1に示すマッサージ装置の各載置姿勢での正面図を示しており、(a)は擦り機構が動作可能な第1姿勢でのマッサージ装置、(b)は揉み機構が動作可能な第2姿勢でのマッサージ装置、(c)はスライド機構が動作可能な第3姿勢でのマッサージ装置を夫々示している。
【図3】擦り機構の構成を示す正面図である。
【図4】揉み機構の構成を示す正面図である。
【図5】図4に示す揉み機構へ動力を伝達する動力伝達機構を示す図面である。
【図6】スライド機構の構成を示す斜視図である。
【図7】図6に示すスライド機構の一部分についての分解斜視図である。
【図8】図6に示すスライド機構の他の部分についての分解平面図である。
【図9】マッサージ装置の機能を示す模式的なブロック図である。
【図10】図9に示したリモートコントローラ82の外観平面図である。
【符号の説明】
【0078】
1 マッサージ装置
1a 軸芯
2 筐体
3 擦り機構(施療機構)
4 揉み機構(施療機構)
5 スライド機構(施療機構)
3a〜5a 施療位置
10 施療部
17 第1モータ
20,21 施療部
22 外側押圧部
23 内側押圧部
34 第2モータ
40 脚載置部
70 制御部
74 検出センサ
76a〜76c 磁気センサ
77b 磁石
80 電源スイッチ
82 リモートコントローラ
83a〜83e スイッチ
90 支持部
91 滑り止め
92 把持部
【技術分野】
【0001】
本発明は、被施療者の身体部位を施療するマッサージ装置に関し、特に、複数の載置姿勢と、夫々の該載置姿勢に対応した複数の施療機構とを備えるマッサージ装置に関する。
【背景技術】
【0002】
従来、例えば被施療者の脚部を施療するマッサージ装置として、1台で複数の施療を実行可能なものが提案されている(例えば、特許文献1参照)。このマッサージ装置によれば、揉み施療、ローラ掛け施療、及び叩き施療という互いに根本的に異なる各施療を、脚部に対して選択的に実行可能であり、しかも、シンプルな構造となっていて低コストで実現可能なものが提案されている。
【特許文献1】特開2000−5254号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、上記特許文献1によるマッサージ装置の場合、3種類の施療を実現する各施療機構が全て連動するようになっている。従って、ある1つの施療機構(例えば、揉み機構)により施療している間においても、その他の施療機構(例えば、ローラ掛け機構、叩き機構)も動作することとなる。一方、仮に夫々の施療機構を独立して動作可能に構成すると、各施療機構を操作するためのスイッチ類が多数必要となるため、操作性の向上を図ることが困難となってしまう。
【0004】
そこで本発明は、複数の載置姿勢に応じた複数の施療機構を備えるマッサージ装置において、使用中に他の施療機構が動作しないようにすると共に、操作性の向上を図ることができるマッサージ装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は上述したような事情に鑑みてなされたものであり、本発明に係るマッサージ装置は、複数の載置姿勢と、夫々の該載置姿勢に対応した複数の施療機構とを備え、一の施療機構の動作中に他の施療機構に対応する載置姿勢に姿勢が変更されると、前記一の施療機構の動作が停止状態となるよう構成されている。
【0006】
このような構成とすることにより、載置姿勢が変更されると、変更前に動作していた施療機構を停止状態とすることができると共に、姿勢変更前の施療機構を停止させるためにスイッチ類の操作をする必要がないため、操作性の向上が図れる。
【0007】
また、一の施療機構の動作中に他の施療機構に対応する載置姿勢に姿勢が変更されると、全ての施療機構の動作が停止状態となるよう構成されていてもよい。このような構成とすることにより、姿勢を変更した後、被施療者が意図するまで(即ち、次の施療を行おうと意図するまで)、全ての施療機構を停止状態としておくことができる。従って、意図せずマッサージ装置の載置姿勢が変更されてしまったとしても、全ての施療機構が停止するため、施療機構の動作によって不具合が生じることがない。
【0008】
また、前記施療機構の動作を制御する制御部と、載置姿勢を検出する姿勢検出センサとを更に備え、該姿勢検出センサから載置姿勢の変更を示す信号が検出されると、前記制御部は施療機構の動作を停止状態とするよう構成されていてもよい。このような構成とすることにより、姿勢の変更による施療機構の動作停止を具体的に実現することができる。
【0009】
また、前記施療機構を収容する筒状の筐体を更に備え、該筐体の周部に、前記施療機構による身体部位への施療位置が設定されていてもよい。このような構成とすることにより、筒状の筐体をその軸芯回りに転動し、載置姿勢を変更することにより、各載置姿勢に応じた複数の施療を体感することができる。また、筐体が筒状を成しているため、被施療者はマッサージ装置の姿勢を変更しやすいという利点もある。
【0010】
また、前記筐体は、外観視で略三角柱形状を成しており、各施療位置は、前記筐体の周部における頂部に設定されていてもよい。このような構成とすることにより、略三角柱形状の筐体における一側面を下方にして床面に載置でき、載置したときのより高い安定性を確保することができる。また、このように一側面を下方にして配置すると、筐体の周部における頂部が上方に位置することとなる。従って、この頂部に施療位置を設定することにより、身体部位を施療位置に容易に配置することができ、被施療者は該身体部位を施療しやすくなる。
【0011】
また、前記筐体における軸芯方向の端部には、各載置姿勢において床面に前記筐体を支持する支持部が設けられており、該支持部は、各施療機構よりも前記筒状の筐体の軸芯から離反する方向へ突出するよう構成されていてもよい。このような構成とすることにより、マッサージ装置が床面に載置されたときに、何れの載置姿勢であっても施療機構が床面と接触することがない。
【0012】
また、前記施療機構には、身体部位を揉み施療する揉み機構、身体部位を擦り施療する擦り機構、及び身体部位を往復動させて施療する往復機構のうち、少なくとも1つが含まれていてもよい。このような構成とすることにより、1台のマッサージ装置によって異なる3種類の施療を実現することができる。
【0013】
また、複数の前記施療機構を動作させるための複数のモータを備え、該モータは、前記筐体の両端側の夫々に離隔して配置されていてもよい。このような構成とすることにより、モータが収容された状態での筐体の重量バランスが良好となり、安定した載置姿勢をとることが可能となる。
【0014】
また、前記施療機構は、少なくとも前記往復機構を含み、該往復機構は、身体部位が載置されて往復動する載置部を有し、該載置部は可撓性素材により形成されていてもよい。このような構成とすることにより、載置部に身体部位を載せて施療するときの載せ心地が良好となる。また、上述したように床面に筐体を支持すべく突出した支持部を備える場合には、該支持部と往復動する載置部との間に身体部位が位置したとしても、載置部が可撓性を有するため、当該身体部位が強く挟まれるのを防止することができる。
【発明の効果】
【0015】
本発明によれば、複数の載置姿勢に応じた複数の施療機構を備えるマッサージ装置において、使用中に他の施療機構が動作しないようにすると共に、操作性の向上を図ることができるマッサージ装置を実現することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施の形態に係るマッサージ装置について、図面を参照しながら具体的に説明する。図1は、本発明の実施の形態に係るマッサージ装置を示す斜視図である。図1に示すように、マッサージ装置1は筒状であってより詳しくは外観視で略三角柱形状を成す中空の筐体2を備えている。筐体2内にはマッサージ装置1によって実行可能な複数の施療機構が収容されており、本実施の形態では、被施療者の身体部位を擦り施療する擦り機構3、揉み施療する揉み機構4、及び身体部位を往復動させるスライド機構(往復機構)5が収容されている(図2参照)。
【0017】
マッサージ装置1は、複数の載置姿勢をとることが可能になっており、具体的には、筐体2の3つの周面の夫々が下方に位置して床面に対向するよう配置される3つの載置姿勢(第1姿勢〜第3姿勢)をとることができる。そして、上述した3種類の施療機構3〜5と各載置姿勢とは一対一に対応しており、具体的には後述するが、一の載置姿勢のときに、これに対応する一の施療機構が動作可能となっている。
【0018】
また、マッサージ装置1の一方の側部には、外部電源から電力の供給を受けるためのコード(図示せず)を巻き取るコードリール6が設けられている。以下では、説明の便宜上、マッサージ装置1の全体においてこのコードリール6が設けられている側を左側、その反対側を右側として説明することとする。なお、本実施の形態に係るマッサージ装置1は、主に被施療者の脚部(大腿部、下腿部、足首から先の足部を含む)を施療対象とするものであるが、これに限られず、腕部(肩から指先に至るまでの身体部位)や他の部位を対象とするものであってもよい。
【0019】
図2は、図1に示すマッサージ装置1の各載置姿勢での正面図を示しており、(a)は擦り機構3が動作可能な第1姿勢でのマッサージ装置1、(b)は揉み機構4が動作可能な第2姿勢でのマッサージ装置1、(c)はスライド機構5が動作可能な第3姿勢でのマッサージ装置1を夫々示している。図2(a)に示すように、第1姿勢でのマッサージ装置1は、筐体2の上部に擦り機構3による身体部位への施療位置3aが設定され、第2姿勢でのマッサージ装置1は、筐体2の上部に揉み機構4による身体部位への施療位置4aが設定され、第3姿勢でのマッサージ装置1は、筐体2の上部にスライド機構5による身体部位への施療位置5aが設定されている。以下、各施療機構3〜5について順に詳述する。
【0020】
[擦り機構]
図3は、擦り機構3の構成を示す正面図である。図3に示すように、擦り機構3は指圧玉11a,12aを有する長寸の第1施療部10を2つ備えており、この2つの第1施療部10,10は左右に直列接続されている。
【0021】
より詳しくは、第1施療部10は左右で対向配置された支持円盤13と、これらの支持円盤13,13間に架設された指圧棒11,12とから構成されている。一方の指圧棒11は、その長手方向に沿って規則的に径が拡縮した構成となっており、大径部分が指圧玉11aを成している。他方の指圧棒12も同様に、その長手方向に沿って規則的に径が拡縮した構成となっており、大径部分が指圧玉12aを成している。更に、指圧棒12の場合、複数の指圧玉12a毎に若干だけ更に大径の指圧玉12aが設けられており、本実施の形態に係るマッサージ装置1にあっては、3つの指圧玉12aのうち1つが他の2つより若干大径に構成されている。なお、指圧玉11a,12aでは、指圧玉11aの方が大径となっている。
【0022】
この指圧棒11,12は、対向配置された2つの支持円盤13,13における対向面の周縁部近傍にて両端部が接続されている。そして、指圧棒11,12は、支持円盤13の周方向に沿って交互に複数配設され、本実施の形態では夫々4本ずつ配設されている。擦り機構3は、このような構成の2つの第1施療部10が、中心軸を左右方向に一致させた状態で同軸状に設けられ、夫々が有する一方(左右方向の中央側)の支持円盤13の外面同士が接続されることによって、直列に接続されている。
【0023】
支持円盤13の中心位置には左右方向への貫通孔(図示せず)が形成されており、ここには回転シャフト14が挿通されて支持円盤13に固定されている。回転シャフト14の左側の端部14aは、左側の第1施療部10の支持円盤13を貫通して外側方へ延びており、軸受部15を介して筐体2の左側壁2aに回転自在に支持されている。回転シャフト14の右側の端部14bは、右側の第1施療部10の支持円盤13を貫通して外側方へ延びており、別の軸受部15を介して筐体2の右側壁2bに回転自在に支持されている。
【0024】
左側の第1施療部10が有する左側の支持円盤13と左側の軸受部15との間には、大径の従動ギヤ16aが配設され、該従動ギヤ16aは回転シャフト14に対して同軸的に固定されている。一方、筐体2内には第1モータ17が搭載されており、該第1モータは、筐体2の左側壁2aに図示しないブラケットを介して支持されている。該第1モータ17は出力軸17aを筐体2の左側壁2aに向けて配設され、その端部には小径の駆動プーリ18aが取り付けられている。この駆動プーリ18aは、筐体2の左側壁2aに回転自在に支持された大径の従動プーリ18bと、ベルト18cを介して接続されている。また、従動プーリ18bには、上記従動ギヤ16aに比べて小径の駆動ギヤ16bが同軸状にして一体的に取り付けられており、この駆動ギヤ16bと従動ギヤ16aとは互いに噛合している。
【0025】
このような構成によれば、第1モータ17が駆動して出力軸17aが一方向へ回転すると、プーリ18a,18b及びギヤ16a,16bを介してその回転が回転シャフト14へ伝達される。その結果、回転シャフト14と共に第1施療部10,10は一方向へ回転する。また、第1モータ17の出力軸17aが他方向へ回転すると、回転シャフト14と共に第1施療部10,10は他方向へ回転する。
【0026】
ところで、図2(a)に示すように、第1姿勢のマッサージ装置1では、筐体2の上部に、平面視で長方形状を成して左右方向へ長寸の開口2cが形成されている。上述した擦り機構3は、筐体2内に収容されたとき、第1施療部10,10の上部がこの開口2cから外方に露出されるようになっている。従って、第1姿勢のマッサージ装置1の上部に被施療者の脚部を載せ、擦り機構3を駆動すると、第1施療部10,10が回転駆動し、指圧玉11a,12aが脚部を擦るようにして施療する。なお、実際には開口2cを覆うように外部から布製のカバー(図示せず)が取り付けられるため、脚部に対して指圧玉11a,12aはこのカバーを介して接触することとなる。
【0027】
なお、図3では擦り機構3が直列接続された2つの第1施療部10,10を備える構成について示したが、これに限られず、より長寸を成す1つの第1施療部によって構成してもよい。即ち、図3において左右方向の中央にて互いに接続された2つの支持円盤13,13を省き、左右の第1施療部10,10が備える指圧棒11,12を連結したような構成としてもよい。また、第1施療部10として、指圧棒11,12のうち何れか一方のみを備えるものであってもよいし、或いは、上述した説明と異なる構成の指圧棒を備えていてもよい。
【0028】
[揉み機構]
図4は、揉み機構4の構成を示す正面図であり、図5は、図4に示す揉み機構4へ動力を伝達する動力伝達機構を示す図面である。図4に示すように、揉み機構4は左右の脚部が挟み入れられる左右の第2施療部20,21を備えており、左側の第2施療部20は、左脚の外側部を押圧する外側押圧部22と、左脚の内側部を押圧する内側押圧部23とを有している。
【0029】
外側押圧部22は、左右方向に延びる筒状の中空軸24と、該中空軸24の左端部に設けられた円盤状の押圧円板25とを有している。押圧円板25はその中心部にて中空軸24に一体的に接続されており、且つ、中空軸24の軸芯4cと押圧円板25の軸芯とが所定の角度(例えば、10度)を形成するように、中空軸24に対して押圧円板25は配向されている。また、押圧円板25において左脚の外側部に対向する面25aには、合成樹脂製の施療突起25bが、押圧円板25の周方向に沿って複数取り付けられている。
【0030】
内側押圧部23は、左右方向に延びる筒状の中空軸26と、該中空軸26の長手方向の中央部分に設けられた円盤状の押圧円板27とを有している。押圧円板27はその中心部にて中空軸26に一体的に接続されており、且つ、中空軸26の軸芯と押圧円板27の軸芯4cとが所定の角度(例えば、10度)を形成するように、中空軸26に対して押圧円板27は配向されている。また、押圧円板27において左脚の内側部に対向する面27aには、合成樹脂製の施療突起27bが、押圧円板27の周方向に沿って複数取り付けられている。
【0031】
外側押圧部22が有して押圧円板25から右方向へ延びる中空軸24は、内側押圧部23が有する中空軸26のうち押圧円板27から左方向(揉み機構4の外方)へ延びる部分26aよりも、内径寸法が大きくなっており、中空軸24の内部に、中空軸26の前記部分26aは嵌挿されている。従って、内側押圧部23は左右方向へ移動可能であって、外側押圧部22に対して内側押圧部23は接近及び離反することができるようになっている。
【0032】
右側の第2施療部21は、上述した左側の第2施療部20と左右対称な構成となっており、外側押圧部22及び内側押圧部23を備えている。但し、右側の第2施療部21の内側押圧部23が有する中空軸26のうち、押圧円板27より左側(揉み機構4の中央側)の部分26bは、左側の第2施療部21の内側押圧部23が有する中空軸26のうち、押圧円板27より右側(揉み機構4の中央側)の部分26cの内径寸法よりも小さくなっている。そして、右側の前記部分26cは左側の前記部分26bの内部に嵌挿されており、左右の内側押圧部22,22は、互いに接近及び離反が可能なように左右方向へ移動可能となっている。
【0033】
また、左右の第2施療部20,21が有する外側押圧部22の押圧円板25の外側方には、スペーサ28,28が配設されている。このスペーサ28は、押圧円板25より若干小径の円筒部材を、その一端を斜めに切断したような構成となっており、押圧円板25の外側方の隙間を埋めるためのものである。同様に、左右の第2施療部20,21が有する内側押圧部23の押圧円板27,27の間には、スペーサ29,29が配設されている。このスペーサ29も、押圧円板27より若干小径の円筒部材を、その一端を斜めに切断したような構成となっており、押圧円板27,27間の隙間を埋めるためのものである。更に、左側のスペーサ29の内径は右側のスペーサ29の外径より若干大きい寸法を有しており、右側のスペーサ29は左側のスペーサ29内に一部が挿通された状態で軸芯4cに沿った方向へスライド移動可能になっている。
【0034】
中空軸24,26の内部空間には、左右の第2施療部20,21を回転させるための回転シャフト30が設けられており、該回転シャフト30は、各中空軸24,26とスプライン結合している。従って、中空軸24,26は、回転シャフト30の軸芯に沿った左右方向へは回転シャフト30とは独立して可動である一方、回転シャフト30の周方向へは該回転シャフト30と一体でのみ回転可能になっている。なお、外側押圧部22と内側押圧部23とを回転シャフト30に挿通するに際し、各押圧円板25,27の中心軸の軸芯4cに対する傾斜方向が互いに逆になるようにしている。従って、対向配置された押圧円板25,27の離隔距離は、小さい部分と大きい部分とが存在するようになっている。
【0035】
回転シャフト30の左端部は、筐体2の左側壁2aに設けられた軸受部32によって回転自在に支持されており、右端部近傍も、筐体2の右側壁2bに設けられた軸受部32によって回転自在に支持されている。そして、回転シャフト30の右端部であって、上記軸受部32よりも右側壁2bから右側方(外側方)へ突出した部分には、回転シャフト30と同軸状に大径の従動ギヤ33aが取り付けられている(図5も参照)。
【0036】
図5に示すように、筐体2の右側には第2モータ34が図示しないブラケットを介して取り付けられており、該第2モータ34の出力軸34aは、筐体2の右側壁2bを貫通して外方へ突出している。この出力軸34aの右端部には小径の駆動プーリ35aが取り付けられており、該駆動プーリ35aは、筐体2の右側壁2bの略中央部分にて回転自在に支持された大径の従動プーリ35bと、その近傍にて同様に右側壁2bに回転自在に支持された小径の従動プーリ35cとの間で、ベルト35dを介して接続されている。
【0037】
大径の従動プーリ35bの右側(図5における紙面手前側)には、小径の駆動ギヤ33bが、従動プーリ35bと同軸状であって且つ間に図示しないクラッチを介して設けられている。そして、この駆動ギヤ33bが、上記回転シャフト30の右端部に設けられた大径の従動ギヤ33aと噛合している。なお、前記クラッチは、従動プーリ35bが一方向へ回転した場合にその回転を駆動ギヤ33bへ伝達するが、従動プーリ35bが他方向へ回転した場合にはその回転を駆動ギヤ33bへ伝達しないようになっている。
【0038】
従って、第2モータ34が駆動して出力軸34aが一方向へ回転すると、その回転動力は駆動プーリ35a、ベルト35d、従動プーリ35b、駆動ギヤ33b、及び従動ギヤ33aから成る動力伝達機構37を通じて回転シャフト30へ伝達され、これを回転させる。回転シャフト30が回転すると、これとスプライン結合された第2施療部20,21が一体的に回転する。また、第2モータ34が駆動して出力軸34aが他方向へ回転した場合には、上記クラッチの作用により、第2モータ34の回転は回転シャフト30へ伝達されず、第2施療部20,21は回転しないため、揉み機構4は動作しない。
【0039】
また、第2施療部20,21が有する左右の押圧円板25,27間に脚部を位置させた状態で第2モータ34を駆動した場合には、これら押圧円板25,27が脚部の外側部及び内側部に接触した状態で回転する。そして、押圧円板25,27の中心軸は軸芯4cに対して所定の角度だけ傾斜しているため、回転に伴って左右の押圧円板25,27は、脚部に対して接近及び離反を繰り返すこととなり、この動作が脚部に対する揉み動作となる。
【0040】
また、第2施療部20,21の内側押圧部23,23は、回転シャフト30に沿って左右へスライド可能であるため、被施療者の脚部寸法の違いに対応して、外側押圧部22からの距離、即ち、外側押圧部22の押圧円板25と内側押圧部23の押圧円板27との離隔距離が変更されるようになっている。更に、図4に示すように、中央のスペーサ29,29の内部空間において押圧円板25,27間には付勢手段たるスプリングバネ38が取り付けられている。このスプリングバネ38は、左右の押圧円板25,27を左右方向の外側へ(即ち、両者が離反する方向へ)付勢する。従って、スプリングバネ38の付勢力により生じる適切な押圧力によって、押圧円板25,27が被施療者の脚部に押し当てられることとなる。
【0041】
ところで、図2(b)に示すように、第2姿勢のマッサージ装置1では、筐体2の上部に、平面視で長方形状を成して左右方向へ長寸の開口2dが形成されている。上述した揉み機構4は、筐体2内に収容されたとき、第2施療部20,21のうち略上半分の部分が、この開口2dから外方に露出されるようになっている。従って、第2姿勢のマッサージ装置1の上部に被施療者が脚部を載せ、揉み機構4を駆動すると、第2施療部20,21が回転駆動し、対向配置された押圧円板25,27が脚部を左右から揉むようにして施療する。また、押圧円板25,27には施療突起25b,27bが取り付けられているため、この施療突起25b,27bによって脚部を効果的に揉みほぐすことが可能である。なお、実際には図2(b)に示した開口2d部分に、第2施療部20,21の露出部分の形状に合った布製のカバー(図示せず)が被せられることとなるため、脚部に対して押圧円板25,27や施療突起25a,27aは、このカバーを介して接触することとなる。
【0042】
[スライド機構]
図6は、スライド機構5の構成を示す斜視図であり、図7は図6に示すスライド機構5の一部分についての分解斜視図、図8は図6に示すスライド機構5の他の部分についての分解平面図である。
【0043】
図6及び図7に示すように、スライド機構5は被施療者の脚部が載置される脚載置部40を備えている。この脚載置部40は可撓性を有する合成樹脂製であり、筒状部材を軸芯に沿って半分だけ切除したような概略形状を成し、軸芯を左右方向に沿うようにして配設されている。脚載置部40の上部には左右の脚部を支持する凹部40aが左右に形成されている。
【0044】
脚載置部40の下部には、左右方向へスライド可能なスライダ42が接続されている。このスライダ42は、平面視で略矩形板状を成してその上面には縦横に延びる複数のリブが突設され、左右の2箇所には上方へ延びる筒状接続部42aが設けられている。脚載置部40の下面からは、スライダ42の筒状接続部42aに嵌挿される棒状の嵌挿部(図示せず)が下方へ延びており、筒状接続部42aにこの嵌挿部が嵌め入れられることによって、脚載置部40はスライダ42の上部に固定される。また、スライダ42の右端部には矩形状のフランジ42bが設けられており、該フランジ42bには、上下方向へ貫通する2つのボルト孔42cが形成されている。
【0045】
また、脚載置部40の下方には、左右方向へ延びる2本のガイドポール45が設けられている。該ガイドポール45は、両端が筐体2の左側壁2aと右側壁2bとに夫々固定された状態で前後に並設されており、上記スライダ42は、このガイドポール45に沿って左右へスライド可能になっている。
【0046】
即ち、図7に示すように、スライダ42の後部左右(即ち、矩形板状を成すスライダ42において、ガイドポール45に沿って延びる一方の端辺の左右部分)の下部には、一方(後側)のガイドポール45に支持されるポール支持部43が設けられ、該ポール支持部43には左右方向へ貫通したガイド孔43aが形成されている。また、スライダ42の前部左右(即ち、スライダ42において、ガイドポール45に沿って延びる他方の端辺の左右部分)の下部には、他方(前側)のガイドポール45に支持されるポール支持部44が設けられ、該ポール支持部44には左右方向及び前方へ開口して凹状を成すガイド受部44aが形成されている。従って、ガイド孔43aに後側のガイドポール45が挿通され、ガイド受部44aにて前側のガイドポール45が受けられることにより、スライダ42は前後のガイドポール45に支持される。そして、この状態でスライダ42は、ガイドポール45に沿って左右方向へスライド可能となっている。
【0047】
スライダ42の右側方には、回転運動を直線的な往復運動に変換するための変換部材47が設けられている。この変換部材47は平面視で略矩形板状を成しており、スライダ42と同様に縦横へ延びる複数のリブが突設されている。また、変換部材47の左端部にはフランジ47bが設けられており、該フランジ47bには上下方向へ貫通する2つのボルト孔47cが形成されている。スライダ42と変換部材47とは、互いのフランジ42b,47bが上下に重ねられ、同心状に配設されたボルト孔42c,47cへボルト(図示せず)が挿通されることによって互いに接続されている。また、変換部材47の略中央には、前後方向へ延びて上下方向に貫通する長孔47aが形成されている。
【0048】
図8の平面図に示すように、変換部材47(図8ではその一部を平面視した構成を二点鎖線で示す)の下方には、平面視で円盤状を成すクランク49が配設されている。このクランク49の周縁部の上面には、上方へ突設されたボス部49aが設けられており、該ボス部49aは変換部材47の長孔47aに下方から挿通される。
【0049】
クランク49の下方には、回転運動の向きを変換するギヤユニット51と、このギヤユニットを収納するギヤケース55とが配設されている。ギヤユニット51は、左右方向へ軸芯が向けられたウォーム52と、該ウォーム52に噛合する平歯車53とから構成されており、ウォーム52の右端部には、既に説明した従動プーリ35c(図5参照)が同軸状にして一方向クラッチ60を介して接続されている。
【0050】
ギヤケース55は上下割りになっており、上側ケース56と下側ケース57とから構成されている。上側ケース56と下側ケース57とは略上下対象の構成になっており、互いの対向面に、ウォーム52と平歯車53とが収められる凹部57a(上側ケース56の凹部は図示を省略する)が形成されている。そして、上側ケース56と下側ケース57とが接続され、周部がボルト締結された場合に、夫々の凹部57aによって形成されるスペースに、従動プーリ35cが外部へ突出した状態で上記ギヤユニット51が収容されている。更に、上側ケース56に形成された上下方向の貫通孔56bを通じて、平歯車53とクランク49とが同軸状に接続されている。
【0051】
なお、揉み機構4の説明において既に言及したように、ウォーム52に接続された従動プーリ35cは、第2モータ34の出力軸34aに取り付けられた駆動プーリ35aに、ベルト35dを介して接続されている。
【0052】
このような構成のスライド機構5は、揉み機構4を駆動した第2モータ34によって駆動され、上述したように第2モータ34の出力軸34aが一方向へ回転すると揉み機構4が駆動するが、出力軸34aが他方向へ回転するとスライド機構5が駆動するようになっている。
【0053】
より詳述すると、図5に示すように、第2モータ34が駆動して出力軸34aが他方向へ回転すると、大径の従動プーリ35bと小径の従動プーリ35cとが回転するが、従動プーリ35bの回転は駆動ギヤ33bへは伝達されず、揉み機構4は動作しない。一方、従動プーリ35cの回転はウォーム52及び平歯車53を介してクランク49へ伝達され、クランク49を回転させる。クランク49が回転すると、ボス部49a及び長孔47aを介してジョイントされた変換部材47は左右方向へ往復移動し、回転運動が直線運動に
変換される。
【0054】
変換部材47が往復移動すると、これに接続されたスライダ42は、ガイドポール45に沿って左右方向へスライドし、スライダ42の上部に接続された脚載置部40も左右方向へスライドすることとなる。従って、脚載置部40の凹部40aにて脚部が支持された状態でスライド機構5が動作すると、脚載置部40の往復動作に伴って被施療者の脚部は股関節を中心にして左右へ揺動され、このような運動は股関節の施療に有効である。
【0055】
なお、この脚載置部40がスライドする往復距離は、クランク49の回転中心からボス部49aまでの距離に等しい。また、第2モータ34の出力軸34aが一方向へ回転した場合は、一方向クラッチ60の作用により、従動プーリ35cの回転はウォーム52へ伝達されず、スライド機構5は動作しないようになっている。また、図2(c)に示すように、第3姿勢のマッサージ装置1では、筐体2の上部にスライド機構5による施療位置5aが設定されており、脚載置部40のみが筐体2の外部に露出されている。
【0056】
また、これまでに説明した施療機構3〜5のうち、揉み機構4とスライド機構5とは同じ第2モータ34によって駆動されるため、各施療機構4,5を別々のモータで駆動する場合に比べて重量物であるモータの数を低減することができ、マッサージ装置1の軽量化が図れている。また、マッサージ装置1は施療機構3〜5を駆動するために合計2つのモータ17,34を備え、これらのモータ17,34は筐体2内の左右に分かれて配設されている。このように、比較的重量物であるモータ17,34が両側方に位置しているため、マッサージ装置1の重量バランスは良好に確保されている。
【0057】
ところで、本実施の形態に係るマッサージ装置1は、脚載置部40と支持部90との間に物体が挟まったことを検知する接触センサ78(図9参照)を備えているため、物体が挟まった状態のまま、スライド機構5が継続して動作するのを防止できるようになっている。即ち、この接触センサ78は、支持部90において脚載置部40に対向する面などに適宜設けられており、後述する図9に示すように制御部70に接続され、脚載置部40と支持部90との間に物体が挟まったことを検知すると、その検知信号を制御部70へと出力するように構成されている。そして、制御部70は、この検知信号を受信すると第2モータ34を停止させる。従って、脚載置部40と支持部90との間に物体が挟まったとしても、第2モータ34の停止によって脚載置部40の動作が中止されるため、物体が挟まった状態のままでスライド機構5が継続的に動作するのを防止することができる。
【0058】
[姿勢検出]
図9は、上述したような構成のマッサージ装置1の機能を示す模式的なブロック図である。図9に示すように、マッサージ装置1は制御部70を備えており、該制御部70は筐体2(図1参照)内に収容されている。制御部70は、既に説明した第1モータ17及び第2モータ34と、駆動部71,72を介して夫々接続されている。従って、制御部70からの制御信号により駆動部71,72は所定の電気信号を出力し、第1モータ17及び第2モータ34はこの電気信号に基づいて個別に駆動制御される。そして、第1モータ17の駆動によって擦り機構3が動作し、第2モータ34の駆動によって揉み機構4とスライド機構5とが選択的に動作する。
【0059】
また、制御部70には姿勢検出センサ74が接続されている。この姿勢検出センサ74は、マッサージ装置1の姿勢(第1〜第3姿勢)を検出するものであり、図9中に模式的に例示するように近接スイッチによって構成されている。より詳述すると、姿勢検出センサ74は、基板75上に取り付けられた3つの磁気センサ76a〜76cと、回転磁片77とを有している。3つの磁気センサ76a〜76cは、所定点75aを中心とする同心円に沿って等間隔(即ち、120度間隔)で配設されており、各磁気センサ76a〜76cは第1〜第3姿勢に対応している。また、回転磁片77は、所定点75aに回転自在に支持された旋回部材77aと、該旋回部材77aの先端(所定点75aから離隔した端部)に取り付けられた磁石77bとから構成されており、この磁石77bは、旋回部材77aが回転したときに、その回転軌道(前記同心円と一致)の途中で3つの磁気センサ76a〜76cと対向するようになっている。
【0060】
このような姿勢検出センサ74は、マッサージ装置1の左側壁2a近傍にて、旋回部材77aの回転軸芯が左右方向と一致するようにして取り付けられている。そして、旋回部材77aは、マッサージ装置1が第1〜第3姿勢の何れであるかに拘らず、自重によって磁石77bが所定点75aに対して鉛直下方に位置するようになっている。従って、マッサージ装置1が第1姿勢をとっているときは、磁気センサ76aが磁石77bに対向するよう位置し(図9の状態)、磁石77bが発生する磁気を検出してマッサージ装置1が第1姿勢をとっている旨の信号を制御部70へ出力する。
【0061】
同様に、マッサージ装置1が第2姿勢をとっているときは、磁気センサ76bが磁石77bに対向するよう位置し、磁気センサ76bは、第2姿勢をとっている旨の信号を制御部70へ出力する。マッサージ装置1が第3姿勢をとっているときは、磁気センサ76cが磁石77bに対向するよう位置し、磁気センサ76cは、第3姿勢をとっている旨の信号を制御部70へ出力する。
【0062】
制御部70は、姿勢検出センサ74からのこれらの信号に基づき、マッサージ装置1が第1〜第3の何れの姿勢をとっているか判断すると共に、これらの信号の入力が途切れるか、又は別の信号に切り替わった場合に、姿勢が変更されたと判断する。制御部70は、姿勢が変更されたと判断した場合には、動作中であるか否かに拘らず、施療機構3〜5の全てについて動作を停止させるよう制御する。例えば、第1姿勢において擦り機構3が動作している間に第2姿勢へと変更されると、擦り機構3を含む全ての施療機構3〜5の動作が停止状態とされる。
【0063】
なお、上述した説明では、姿勢が変更された場合に全ての施療機構3〜5が停止状態となるよう制御される場合について説明したが、これに限られない。姿勢が変更された場合に、変更前の施療機構(例えば、擦り機構3)は停止状態とする一方、変更後の姿勢(例えば、第2姿勢)に対応する施療機構(例えば、揉み機構4)の動作を開始するように制御してもよい。
【0064】
このような構成とすることにより、一の姿勢での施療後、他の姿勢で施療を行おうとする場合に、一の姿勢での施療機構の動作を停止させるための操作を別途行う必要がなく、操作性の向上を図ることができる。また、これに伴ってマッサージ装置1のスイッチ類の数を減らすことができるため、マッサージ装置1の低コスト化が可能である。
【0065】
ところで、後述するように、スライド機構5は一対の支持部90,90間に配設され、この支持部90,90間を脚載置部40が往復動する(図1参照)。そして、この支持部90には、脚載置部40との間に何らかの物体が挟まった場合は、既に説明したように脚載置部40が可撓性を有するため、この脚載置部40が撓むことによってマッサージ装置1又は物体の損傷等を回避できるようになっている。
【0066】
また、既に説明したように、本実施の形態に係るマッサージ装置1は接触センサ78を備えている。そして、この接触センサ78が脚載置部40と支持部90との間に物体が挟まったことを検知すると、その検知信号は制御部70へ出力される。制御部70は、この検知信号に基づいて駆動部72へ制御信号を出力し、第2モータ34を停止させる。従って、脚載置部40と支持部90との間に物体が挟まった場合、これを検知して第2モータ34を停止させ、脚載置部40の動作を中止させることが可能である。
【0067】
一方、図9に示すように、制御部70には電源スイッチ80が接続され、これを操作することにより、家庭に備えられている商用電源から電源ケーブル(図示せず)を通じて供給される電力を、制御部70及び駆動部71,72へ入電するか否かについて切り換えることができる。更に、制御部70には赤外線による信号を受信可能な受信部81が接続されており、リモートコントローラ82から発せられる赤外線信号を受信し、これを制御部70へ入力できるようになっている。
【0068】
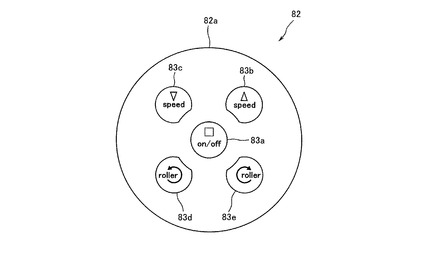
[リモートコントローラ]
図10は、図9に示したリモートコントローラ82の外観平面図である。リモートコントローラ82は、比較的厚みのある円盤状の本体部82aを有し、その上面には5つのスイッチ83a〜83eが配設されている。これらのスイッチ83a〜83eを押すことにより、図示しない出力部から赤外線の信号を発することができ、この信号はマッサージ装置1の受信部81にて受信され、制御部70へ入力される。
【0069】
各スイッチ83a〜83eについて具体的に説明すると、本体部82aの中央にはオンオフスイッチ83aが設けられている。このスイッチ83aは、これを押すことにより、施療機構3〜5のうちマッサージ装置1がとっている姿勢に対応した施療機構を動作させ、又は停止させることが可能である。図9においてスイッチ83aの右斜め上方にはスピードアップスイッチ83bが設けられ、左斜め上方にはスピードダウンスイッチ83cが設けられている。これらのスイッチ83b,83cは、施療機構3〜5の動作速度を調整するためのものであり、スイッチ83bを押すたびに動作速度は増し、スイッチ83cを押すたびに動作速度は減じられる。
【0070】
また、スイッチ83aの右斜め下方と左斜め下方とには、擦り機構3が有する第1施療部10の回転方向を決定する第1ローラスイッチ83dと第2ローラスイッチ83eとが設けられている。このうちスイッチ83dを押すと第1施療部10は一方向へ回転し、スイッチ83eを押すと第1施療部10は他方向へ回転する。
【0071】
このように本実施の形態では、上述したようにマッサージ装置1が、姿勢の変更によって施療機構3〜5が自動的に停止されるように構成されているため、リモートコントローラ82には、上記のような5つのスイッチ83a〜83eを備えるだけでよい。従って、リモートコントローラ82の操作(マッサージ装置1の操作)が簡単であり、該リモートコントローラ82の小型化を図ることも可能である。このリモートコントローラ82は小型化されているため、本実施の形態では、マッサージ装置1の右端面に着脱可能に装着されている。
【0072】
[床面支持構造]
ところで、図1に示すようにマッサージ装置1は、既に説明したように外観視で略三角柱形状を成している。そして、その長手方向の端部には、マッサージ装置1を床面に載置したときに該床面に接触してマッサージ装置1を支持する支持部90が設けられている。より詳しく説明すると、筐体2における軸芯1aに沿った方向(左右方向)の端部であって、略三角柱形状を成す筐体2の各頂部には、筐体2の周面よりも外方(軸芯1aから離反する方向)へ突出した支持部90が設けられている。従って、筐体2の一方の端部には周方向に沿って3つの支持部90が等間隔で設けられ、他方の端部にも周方向に沿って3つの支持部90が等間隔で設けられている。
【0073】
また、各頂部の両端部に設けられた一対の支持部90間には、施療機構3〜5の何れか対応する一つが配設されており、前記一対の支持部90は、間に位置する施療機構3〜5よりも外方へ突出している。これらの支持部90は、側面視すると外周が円弧状となっており、その端面には合成樹脂製の滑り止め91が貼付されている。
【0074】
このようなマッサージ装置1が第1〜第3姿勢で床面に載置された状態は図2に示されており、各姿勢においてマッサージ装置1は、左右各2つ(即ち、合計4つ)の支持部90によって床面上に支持されている。またこのとき、支持部90は施療機構3〜5よりも外方へ突出しているため、施療機構3〜5が床面に直接的に接触するのを回避することができる。更に、支持部90の端面に貼付された滑り止め91により、マッサージ装置1は床面に対して安定的に載置される。
【0075】
また、図1に示すように、マッサージ装置1の左右の端面には、各支持部90の近傍に凹状に窪んだ把持部92が形成されている。従って、マッサージ装置1を運んだり、姿勢を変更させるに際して被施療者は、この把持部92と支持部90の端面とを挟むようにして掴んで持上げることができる。また、支持部90の端面に貼付した滑り止め91は、このように持上げる場合においては人手に対する滑り止め効果を発揮することとなる。
【産業上の利用可能性】
【0076】
本発明は、複数の載置姿勢に応じた複数の施療機構を備えるマッサージ装置において、使用中に他の施療機構が動作しないようにすると共に、操作性の向上を図ることができるマッサージ装置に適用することができる。
【図面の簡単な説明】
【0077】
【図1】本発明の実施の形態に係るマッサージ装置を示す斜視図である。
【図2】図1に示すマッサージ装置の各載置姿勢での正面図を示しており、(a)は擦り機構が動作可能な第1姿勢でのマッサージ装置、(b)は揉み機構が動作可能な第2姿勢でのマッサージ装置、(c)はスライド機構が動作可能な第3姿勢でのマッサージ装置を夫々示している。
【図3】擦り機構の構成を示す正面図である。
【図4】揉み機構の構成を示す正面図である。
【図5】図4に示す揉み機構へ動力を伝達する動力伝達機構を示す図面である。
【図6】スライド機構の構成を示す斜視図である。
【図7】図6に示すスライド機構の一部分についての分解斜視図である。
【図8】図6に示すスライド機構の他の部分についての分解平面図である。
【図9】マッサージ装置の機能を示す模式的なブロック図である。
【図10】図9に示したリモートコントローラ82の外観平面図である。
【符号の説明】
【0078】
1 マッサージ装置
1a 軸芯
2 筐体
3 擦り機構(施療機構)
4 揉み機構(施療機構)
5 スライド機構(施療機構)
3a〜5a 施療位置
10 施療部
17 第1モータ
20,21 施療部
22 外側押圧部
23 内側押圧部
34 第2モータ
40 脚載置部
70 制御部
74 検出センサ
76a〜76c 磁気センサ
77b 磁石
80 電源スイッチ
82 リモートコントローラ
83a〜83e スイッチ
90 支持部
91 滑り止め
92 把持部
【特許請求の範囲】
【請求項1】
複数の載置姿勢と、夫々の該載置姿勢に対応した複数の施療機構とを備え、一の施療機構の動作中に他の施療機構に対応する載置姿勢に姿勢が変更されると、前記一の施療機構の動作が停止状態となるよう構成されていることを特徴とするマッサージ装置。
【請求項2】
一の施療機構の動作中に他の施療機構に対応する載置姿勢に姿勢が変更されると、全ての施療機構の動作が停止状態となるよう構成されていることを特徴とする請求項1に記載のマッサージ装置。
【請求項3】
前記施療機構の動作を制御する制御部と、載置姿勢を検出する姿勢検出センサとを更に備え、該姿勢検出センサから載置姿勢の変更を示す信号が検出されると、前記制御部は施療機構の動作を停止状態とするよう構成されていることを特徴とする請求項1又は2に記載のマッサージ装置。
【請求項4】
前記施療機構を収容する筒状の筐体を更に備え、該筐体の周部に、前記施療機構による身体部位への施療位置が設定されていることを特徴とする請求項1乃至3の何れかに記載のマッサージ装置。
【請求項5】
前記筐体は、外観視で略三角柱形状を成しており、各施療位置は、前記筐体の周部における頂部に設定されていることを特徴とする請求項4に記載のマッサージ装置。
【請求項6】
前記筐体における軸芯方向の端部には、各載置姿勢において床面に前記筐体を支持する支持部が設けられており、該支持部は、各施療機構よりも前記筒状の筐体の軸芯から離反する方向へ突出していることを特徴とする請求項4又は5に記載のマッサージ装置。
【請求項7】
前記施療機構には、身体部位を揉み施療する揉み機構、身体部位を擦り施療する擦り機構、及び身体部位を往復動させて施療する往復機構のうち、少なくとも1つが含まれていることを特徴とする請求項1乃至6の何れかに記載のマッサージ装置。
【請求項8】
複数の前記施療機構を動作させるための複数のモータを備え、該モータは、前記筐体の両端側の夫々に離隔して配置されていることを特徴とする請求項4乃至7の何れかに記載のマッサージ装置。
【請求項9】
前記施療機構は、少なくとも前記往復機構を含み、該往復機構は、身体部位が載置されて往復動する載置部を有し、該載置部は可撓性素材により形成されていることを特徴とする請求項7又は8に記載のマッサージ装置。
【請求項1】
複数の載置姿勢と、夫々の該載置姿勢に対応した複数の施療機構とを備え、一の施療機構の動作中に他の施療機構に対応する載置姿勢に姿勢が変更されると、前記一の施療機構の動作が停止状態となるよう構成されていることを特徴とするマッサージ装置。
【請求項2】
一の施療機構の動作中に他の施療機構に対応する載置姿勢に姿勢が変更されると、全ての施療機構の動作が停止状態となるよう構成されていることを特徴とする請求項1に記載のマッサージ装置。
【請求項3】
前記施療機構の動作を制御する制御部と、載置姿勢を検出する姿勢検出センサとを更に備え、該姿勢検出センサから載置姿勢の変更を示す信号が検出されると、前記制御部は施療機構の動作を停止状態とするよう構成されていることを特徴とする請求項1又は2に記載のマッサージ装置。
【請求項4】
前記施療機構を収容する筒状の筐体を更に備え、該筐体の周部に、前記施療機構による身体部位への施療位置が設定されていることを特徴とする請求項1乃至3の何れかに記載のマッサージ装置。
【請求項5】
前記筐体は、外観視で略三角柱形状を成しており、各施療位置は、前記筐体の周部における頂部に設定されていることを特徴とする請求項4に記載のマッサージ装置。
【請求項6】
前記筐体における軸芯方向の端部には、各載置姿勢において床面に前記筐体を支持する支持部が設けられており、該支持部は、各施療機構よりも前記筒状の筐体の軸芯から離反する方向へ突出していることを特徴とする請求項4又は5に記載のマッサージ装置。
【請求項7】
前記施療機構には、身体部位を揉み施療する揉み機構、身体部位を擦り施療する擦り機構、及び身体部位を往復動させて施療する往復機構のうち、少なくとも1つが含まれていることを特徴とする請求項1乃至6の何れかに記載のマッサージ装置。
【請求項8】
複数の前記施療機構を動作させるための複数のモータを備え、該モータは、前記筐体の両端側の夫々に離隔して配置されていることを特徴とする請求項4乃至7の何れかに記載のマッサージ装置。
【請求項9】
前記施療機構は、少なくとも前記往復機構を含み、該往復機構は、身体部位が載置されて往復動する載置部を有し、該載置部は可撓性素材により形成されていることを特徴とする請求項7又は8に記載のマッサージ装置。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−253674(P2008−253674A)
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願番号】特願2007−101980(P2007−101980)
【出願日】平成19年4月9日(2007.4.9)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願日】平成19年4月9日(2007.4.9)
【出願人】(000112406)ファミリー株式会社 (175)
【Fターム(参考)】
[ Back to top ]