
マッチング装置及びマッチング方法並びにマッチング装置用プログラム及び情報記録媒体
【課題】スマートICを経由して高速道路から一般道路に移行する場合、又はその逆の場合の双方において、より適切にマッチング処理を行って自車位置検出の精度を維持/向上させることが可能なマッチング装置を提供する。
【解決手段】車両の位置が道路外となったか否かを検出し、当該位置が道路外であると検出された場合にその位置をいずれかの道路上にマップマッチングさせると共に、当該マップマッチングに当たりその位置が道路外と検出される直前にマップマッチングされていた道路と同じ種類の道路に優先的にマップマッチングさせるナビゲーション装置Sにおいて、ETCシステムとの間で通信を行うETC通信部8と、自車位置が道路外であると検出されている間に当該通信が行われたか否かを判定すると共に、自車位置が道路外であると検出されている間に通信が行われたとき、上記優先的にマップマッチングさせる制御の実行を禁止する処理制御部23と、を備える。
【解決手段】車両の位置が道路外となったか否かを検出し、当該位置が道路外であると検出された場合にその位置をいずれかの道路上にマップマッチングさせると共に、当該マップマッチングに当たりその位置が道路外と検出される直前にマップマッチングされていた道路と同じ種類の道路に優先的にマップマッチングさせるナビゲーション装置Sにおいて、ETCシステムとの間で通信を行うETC通信部8と、自車位置が道路外であると検出されている間に当該通信が行われたか否かを判定すると共に、自車位置が道路外であると検出されている間に通信が行われたとき、上記優先的にマップマッチングさせる制御の実行を禁止する処理制御部23と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、マッチング装置及びマッチング方法並びにマッチング装置用プログラム及び情報記録媒体の技術分野に属し、より詳細には、移動体の位置と、その移動体が移動しているはずの道路と、の整合を図るマッチング装置及びマッチング方法並びに当該マッチング装置用のプログラム並びに当該プログラムが記録されている情報記録媒体の技術分野に属する。
【背景技術】
【0002】
従来、GPS(Global Positioning System)や自律航法によって自車の現在位置を測位し、表示画面上の道路地図の上に自車位置マークを重ねて表示することにより車両を誘導するナビゲーション装置が知られている。このようなナビゲーション装置は、現在位置の測位誤差に起因して自車位置が地図上の道路から外れた場合に、自車位置を修正して近くの道路上に移動させる「マップマッチング」と呼ばれる機能を有する。
【0003】
一方、近年、「スマートIC(Inter-Change)」と呼ばれる、通常のインターチェンジ以外の地点、例えば高速道路に設けられたサービスエリアやパーキングエリア等において一般道路との間で出入りを可能にしたETC(Electronic Toll Collection system:自動料金収受システム)専用の出入口の実用化が一部の高速道路等において開始されている。このスマートICは、ETC専用のゲートしか備えていない点で、ETCゲートと一般ゲートとを備えた通常のインターチェンジとは異なる。
【0004】
そして、通常は高速道路から一般道路へ出るためにはインターチェンジを通る必要があるが、例えばサービスエリアやパーキングエリアにスマートICが設置されると、そのサービスエリアやパーキングエリアから直接に一般道路に出ることができる。このようなスマートICは、現在段階的に運用が開始されているが、将来的には広く一般化して設置個所も増えると考えられる。
【0005】
ところが、現状のナビゲーション装置では、地図データ上で高速道路と一般道路とが接続されていない場合、マップマッチングの誤作動を避けるために、高速道路にマッチングした状態から一般道路にマッチングする状態への変更をし難くする処理(以下、当該処理を道路種別変更制限処理と称する)が実行される。そのため、例えばスマートICが設置された場所において高速道路と一般道路とが接続されていない地図データを使用するナビゲーション装置では、実際にはスマートICを通過して一般道路を走行しているにも拘わらず、上記道路種別変更制限処理により一般道路にマッチングする状態に変更され難いという問題が発生する。また、スマートICに係る道路データが存在する場合でも、自車の現在位置を自立的に検出する自立センサにおける移動距離測定の誤差等に起因してスマートICに係る道路データ上にマッチングできなかった場合や、当該道路データ自体の位置が正しく整備されていない場合にも、同様の問題が発生する。
【0006】
この問題点を解決するための一方策として、例えば下記特許文献1に開示されている技術がある。この特許文献1に開示されている技術では、高速道路からスマートICを通過して一般道路に出た場合、そのスマートICを通過したことが検出された時点で強制的に一般道路にマッチングする状態となるように制御する構成とされている。
【特許文献1】特開2006−242846号公報(第4図等)
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上述した特許文献1に開示されている技術では、高速道路からサービスエリア等を経てスマートICを通過したことが検出された後には、強制的に一般道路にマッチングする状態となるように制御されるため、例えばスマートICの通過検出が自車位置等の検出処理に係る時間遅延等に起因する誤検出であり、実際はサービスエリア等からスマートICの近傍を通過して再び高速道路に戻っているような場合、その後のマッチング処理において長い期間高速道路上にマッチングする状態とされないという問題点を生じる。
【0008】
ここで、当該誤検出は、サービスエリア等内の道路とスマートICとが通常近接して設置されているものであるため十分に起こり得るものである。また、高速道路に戻ったにも拘わらず長い期間当該高速道路上にマッチングする状態とされないことは、例えばスマートICにより接続されている一般道路と高速道路とが並行して(或いは上下に分かれて)いる場合等当該高速道路と一般道路とが峻別し難い状態にある場合において、自車位置検出精度の誤差が著しく拡大するという問題点に繋がるものである。
【0009】
そこで、本願は上記の各問題点に鑑みて為されたもので、その課題は、スマートICを経由して高速道路から一般道路に移行する場合、又はその逆の場合の双方において、より適切にマッチング処理を行って自車位置検出の精度を維持/向上させることが可能なマッチング装置及びマッチング方法並びに当該マッチング装置用のプログラムを提供することにある。
【課題を解決するための手段】
【0010】
上記の課題を解決するために、請求項1に記載の発明は、車両等の移動体の位置が道路外となったか否かを検出するマッチング処理部等の道路外検出手段と、前記移動体の位置が道路外であると検出された場合に前記移動体の位置をいずれかの道路上に整合させるマッチング処理部等の整合手段と、前記整合手段による整合に当たり、前記移動体の位置が道路外と検出される直前に整合されていた道路と同じ種類の道路に優先的に前記移動体の位置を整合させるように前記整合手段を制御する制御部等の制御手段と、前記移動体の位置が道路外であると検出されている間に、自動料金収受システムとの間で通信が行われたか否かを判定する制御部等の判定手段と、前記移動体の位置が道路外であると検出されている間に前記通信が行われたとき、前記制御手段による前記整合手段に対する前記制御の実行を禁止する制御部等の禁止手段と、を備える。
【0011】
上記の課題を解決するために、請求項6に記載の発明は、車両等の移動体の位置が道路外となったか否かを検出するマッチング処理部等の道路外検出手段と、前記移動体の位置が道路外であると検出された場合に前記移動体の位置をいずれかの道路上に整合させるマッチング処理部等の整合手段と、当該整合に当たり前記移動体の位置が道路外と検出される直前に整合されていた道路と同じ種類の道路に優先的に前記移動体の位置を整合させるように前記整合手段を制御する制御部等の制御手段と、を備えるマッチング装置において実行されるマッチング方法において、前記移動体の位置が道路外であると検出されている間に、自動料金収受システムとの間で通信が行われたか否かを判定する判定工程と、前記移動体の位置が道路外であると検出されている間に前記通信が行われたとき、前記制御手段による前記整合手段に対する前記制御の実行を禁止する禁止工程と、を含む。
【0012】
上記の課題を解決するために、請求項7に記載の発明は、コンピュータを、請求項1から5のいずれか一項に記載のマッチング装置として機能させる。
【0013】
上記の課題を解決するために、請求項8に記載の発明は、請求項7に記載の前記マッチング装置用プログラムが、前記コンピュータにより読み取り可能に記録されている。
【発明を実施するための最良の形態】
【0014】
次に、本願を実施するための最良の形態について、図1乃至図3を用いて説明する。なお、以下に説明する実施形態は、車両の運行を案内するナビゲーション装置に含まれて道路と自車位置との整合を図るマップマッチング機能を有するマッチング装置に対して本願を適用した場合の実施の形態である。
【0015】
また、図1は実施形態に係るナビゲーション装置の概要構成を示すブロック図であり、図2は当該ナビゲーション装置において実行される実施形態に係るマップマッチング処理を示すフローチャートであり、図3は当該マップマッチング処理を概念的に説明する図である。
【0016】
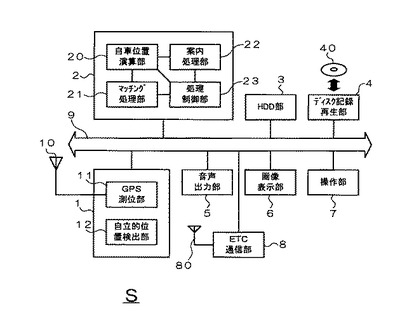
図1に示すように、実施形態に係るナビゲーション装置Sは、車両に搭載されてその運行を案内するものであり、具体的には、距離検出手段としての自車位置検出部1と、処理部2と、HDD(Hard Disc Drive)部3と、ディスク記録再生部4と、図示しないスピーカ及び増幅部等からなる音声出力部5と、液晶ディスプレイ等である図示しないディスプレイ及び画像処理部等からなる画像表示部6と、図示しないボタン操作部及びタッチパネル並びにリモートコントローラ等からなる操作部7と、アンテナ80を介して図示しないETCとの間の通信を行うETC通信部8と、により構成されている。これら自車位置検出部1、処理部2、HDD部3、ディスク記録再生部4、音声出力部5、画像表示部6、操作部7及びETC通信部8は、バス9により相互にデータの授受が可能に接続されている。
【0017】
一方、自車位置検出部1は、宇宙空間に打ち上げられている図示しないGPS(Global Positioning System)航法衛星からの航法電波を受信するアンテナ10に接続された位置検出手段としてのGPS測位部11と、図示しない速度センサ及び加速度センサ等からなる自立的位置検出部12と、により構成されている。
【0018】
更に処理部2は、自車位置演算部20と、道路外検出手段及び整合手段としてのマッチング処理部21と、案内処理部22と、制御手段、判定手段及び禁止手段としての処理制御部23と、により構成されている。
【0019】
次に、実施形態に係るナビゲーション装置Sの概要動作について説明する。
【0020】
GPS測位部11は、アンテナ10を介して受信した上記航法電波に含まれている位置情報等に基づき、ナビゲーション装置Sが備えられている自車の絶対位置としての緯度/経度及び高度を算出し、バス9を介して処理部2の自車位置演算部20に出力する。
【0021】
一方、自立的位置検出部12は、上記各センタからの出力値に基づき、予め設定された起点(例えば出発地点)からの自車の移動距離及び移動方位並びに回転角度等を自立的に算出し、当該算出結果をバス9を介して自車位置演算部20に出力する。
【0022】
これらにより、自車位置演算部20は、処理制御部23の制御の下、主として自立的位置検出部12から出力されて来た移動距離データ等を用い、その補正等の用途にGPS測位部11から出力されて来た緯度/経度等を示す情報を用いつつ、自車の現在位置(以下単に現在位置と称する)を演算し、当該演算された現在位置を示す現在位置データをマッチング処理部21に出力する。
【0023】
他方、HDD部3内の図示しないハードディスクには、地図データとして、道路を示す道路データや交差点又は地物を示す交差点データ等が蓄積されており、必要に応じて当該各データがバス9を介して読み出し可能とされている。
【0024】
そして、マッチング処理部21は、処理制御部23の制御の下、当該現在位置に相当する現在位置データとHDD部3内の上記ハードディスクから読み出される道路データとに基づき、後述する実施形態に係るマップマッチング処理(すなわち、上記現在位置データを、それにより示される現在位置に対応する道路を示す道路データに整合させるマップマッチング処理)を実行し、その結果を案内処理部22に出力する。
【0025】
最後に、案内処理部22は、処理制御部23の制御の下、上記ハードディスク内に記憶されている上記交差点データ等と、マッチング処理部21から出力されるマップマッチング処理の結果と、を用いて、ナビゲーション装置Sとして求められている案内処理(例えば出発前に操作部7を用いて設定された経路に沿った案内処理、又は現在位置が当該経路から逸脱した場合の復帰のための案内処理等)のために必要な画像及び音声に夫々相当する画像データ及び音声データを生成し、バス9を介して音声出力部5又は画像表示部6に出力する。そして、当該音声データが音声出力部5から出力され、或いは当該画像データが画像表示部6において表示されることにより、車両の運転者に対して必要な案内が提供される。
【0026】
これらの動作と並行して、処理制御部23は、上記自車位置演算部20、マッチング処理部21及び案内処理部22夫々の動作を統括制御すると共に、処理部2と他の構成部材とのバス9を介したデータの授受を制御する。
【0027】
他方、ETC通信部8は、通常のETC料金所(有人料金所と、これに併設されているETC用料金所と、を備えるETC料金所)又は上記スマートICにおいて、ETCとの間における通行料金の精算に係る通信処理を実行する。この通信結果については、例えば必要となった通行料金等を音声出力部5を介して運転者に告知するように構成するのが好適である。
【0028】
また、ディスク記録再生部4は、例えば更新された道路データを記録する光ディスク40が装填されたとき、当該装填された光ディスク40から更新用の道路データを読み出してHDD部3に出力したり、或いは音楽が記録されている光ディスク40が装填されたとき、当該装填された光ディスク40から当該音楽に相当する音楽データを再生して音声出力部5に出力する等の処理を実行する。
【0029】
更に、操作部7においては、上述した出発前の経路設定のための操作が実行される他、画像表示部6における地図の表示態様を変更するための操作や、音声出力部5からの音声出力に係る音量の調整等の操作が実行される。
【0030】
次に、ナビゲーション装置Sにおける案内処理の一部としての実施形態に係るマップマッチング処理について、具体的に図2及び図3を用いて説明する。なお、当該マップマッチング処理は、ナビゲーション装置Sにおける上記案内処理の一部として、主としてマッチング処理部21及び処理制御部23を中心として、当該ナビゲーション装置Sの電源がオフとされるまでサブルーチンとして常に実行されている処理である。
【0031】
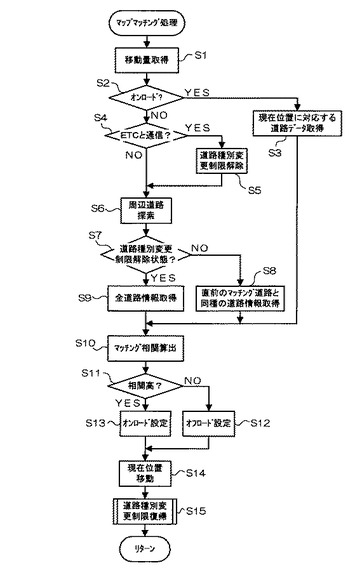
当該マップマッチング処理を行うマッチング処理部21は、図2に示すように、先ず自車位置演算部20を介して自車位置検出部1又はGPS測位部11において生成された上記移動距離データを取得し(ステップS1)、更に現在オンロード状態、すなわちマップマッチングが成されている状態であるか否かを従来と同様の方法により確認する(ステップS2)。このステップS2の確認処理として具体的には、例えば、マッチング処理部21内の図示しないマッチングフラグの内容を確認する等の方法により実行される。
【0032】
そして、現在オンロード状態であると確認されたとき(ステップS2;YES)、マッチング処理部21は、検出されている現在位置に対応する道路データをバス9を介してHDD部3から取得し(ステップS3)、後述するマッチング相関値の算出処理に移行する。
【0033】
一方、ステップS2の判定において、現在オンロード状態でないとき(ステップS2;NO)、処理制御部23は次に、ETC通信部8を介したETCとの間の通信が、例えばスマートIC又は通常のETC料金所において実行されたか否かをETC通信部8において確認する(ステップS4)。そして、ETCとの通信が実行されたことが確認されたとき(ステップS4;YES)、処理制御部23は、マッチング処理部21における道路種別変更制限処理の実行を一旦解除し、当該マッチング処理21を道路種別に無関係に最もマッチング条件の最も良い道路に現在位置をマッチングさせる状態として(ステップS5)、後述するステップS6の処理に移行する。この時、当該解除処理は、例えば、現在当該道路種別変更制限処理が実行状態であるか否かを示すマッチング処理部21内の図示しないフラグを、「制限処理解除」を示す値に変更する等の処理として実現される。
【0034】
なお、実施形態に係る道路種別変更制限処理としては、背景技術として示した高速道路から一般道路に遷移する場合の他、この逆の一般道路から高速道路に遷移する場合を含め、マッチング状態がオフロード状態からオンロード状態となったとき、当該オフロード状態になる直前にマップマッチングされていた道路と同じ種類の道路に優先的にマップマッチングさせるように道路種別の変更を制限する場合を広く含むものとする。
【0035】
他方、ステップS4の確認において未だETCとの通信実行が処理制御部23により確認されないときは(ステップS4;NO)、次にマッチング処理部21は、上記道路種別変更制限処理を実行しつつ、現在位置の周辺にある道路をHDD部3に記録されている道路データ内において探索する(ステップS6)。
【0036】
次にマッチング処理部21は、上記道路種別変更制限処理が現在解除されている状態(上記ステップS5参照)であるか否かを、マッチング処理部21内の上記フラグの値を確認すること等により確認する(ステップS7)。そして、当該道路種別変更制限処理が現在解除されていない状態であると確認されたとき(ステップS7;NO)、マッチング処理部21は、上記ステップS2の判定においてオンロード状態でない(ステップS2;NO。すなわち、オフロード状態である)と判定された直前まで自車の位置がマッチングされていた道路と同じ種別(例えば当該道路が種別として「高速道路」であれば、これと同じ「高速道路」)の道路に相当する道路データを、上記ステップS6における探索結果の中から抽出/取得する(ステップS8)。その後マッチング処理部21は、当該抽出/取得した道路データに相当する道路と現在位置とのマッチング相関値を、従来と同様の方法により算出する(ステップS10)。
【0037】
一方、ステップS7の判定において、道路種別変更制限処理が現在解除されている状態であると確認されたとき(ステップS7;YES)、マッチング処理部21は、上記ステップS6における探索結果に含まれる全ての道路データを取得する(ステップS9)。その後マッチング処理部21は、当該取得した道路データに相当する各道路と現在位置とのマッチング相関値を、夫々の当該道路について従来と同様の方法により算出する(ステップS10)。
【0038】
次にマッチング処理部21は、上記ステップS10の処理の結果として、算出されたマッチング相関値がマッチング処理部21におけるマップマッチング処理として予め設定されている閾値を越えているものがあるか否か、すなわち、現在位置をマッチングさせるのに好適な道路があるか否か、を確認する(ステップS11)。そしてマッチング処理部21は、当該好適な道路がないときは(ステップS11;NO)、マップマッチングが可能な道路がないとして現在のマッチング状態をオフロード状態とし(ステップS12)、後述するステップS14の処理に移行する。一方、ステップS11の判定において、マップマッチングに好適な道路が存在していたとき(ステップS11;YES)、マッチング処理部21は、当該好適な道路に対して現在位置をマップマッチングさせつつ現在のマッチング状態をオンロード状態とする(ステップS13)。
【0039】
その後マッチング処理部21は、マッチング状態をオンロード状態又はオフロード状態のいずれかとしつつ、ステップS1において取得した移動距離に対応して現在位置を移動させる(ステップS14)。
【0040】
最後に処理制御部23は、道路種別変更制限処理が現在解除されている状態であるときは(上記ステップS7;YES参照)、それを復帰させる(すなわち道路種別変更制限処理を実行状態とする)処理を行い(ステップS15)、その後ナビゲーション装置Sの案内処理としてのメイン処理に移行する。なお、上記ステップS15における処理に係る復帰条件等については、後ほど詳説する。また、当該復帰条件のいずれにも該当しない場合には、上記ステップS12又はS13のいずれか一方で設定したマッチング状態のまま、ナビゲーション装置Sの案内処理としてのメイン処理に移行する。
【0041】
次に、図2に示したステップS1乃至S13の処理が実行された場合における実際の現在位置マーク(すなわち、画像表示部6において表示される、自車の現在位置を示す現在位置マーク)の表示上の動き等について、図3を用いて例示する。
【0042】
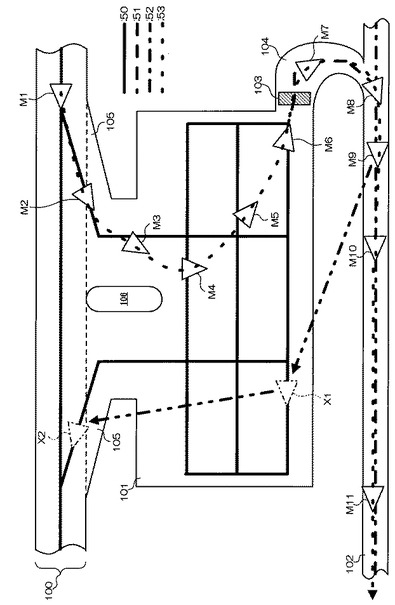
なお図3では、実際の高速道路及びそれに付随するスマートICの一例として、植え込み106により区切られた誘導路105により高速道路100に接続されたサービスエリア101があり、更にその端部にスマートIC103が設置され、当該スマートIC103を通過した車両が誘導路104を経て一般道路102に出ることが可能な場合を例示している。
【0043】
また、当該例示される場合に相当する道路データとしては、図3において実線で示される高速道路データ(高速道路100自体及びサービスエリア101に相当する高速道路データ)50が図3において破線で示される誘導路データ(誘導路104に相当する誘導路データ)51に接続され、更に当該誘導路データ51が図3において一点鎖線で示される一般道路データ(一般道路102に相当する一般道路データ)52に接続されている。また図3においては、高速道路100からスマートIC103を抜けて一般道路102にでる車両の実際の移動経路53を点線で例示している。
【0044】
図3に示す場合において、高速道路100を走行中の車両がスマートIC103を介して一般道路102に出るために、現在位置マークM1で示される位置から誘導路105を経てサービスエリア101に入ると、その車両におけるマッチング状態はオフロード状態となる(図2ステップS;NO参照)。そしてこのマッチング状態のまま現在位置マークM2乃至M6で夫々示される位置を経由してスマートIC103に接近すると、当該スマートIC103におけるETCとの通信が開始される(図2ステップS4;YES参照)。
【0045】
次に、当該通信が開始されると、実施形態に係るマッチング処理として上記道路種別変更制限処理の実行が一旦解除される(図2ステップS5参照)。これにより、当該車両のマッチング状態としては、道路種別に無関係に、以降において最もマッチング条件の良い道路(図3に例示する場合では高速道路100又は一般道路102のいずれか一方)に現在位置をマッチングさせ得る状態となる。
【0046】
その後、道路種別変更制限処理の実行が解除された状態で車両が現在位置マークM7及びM8で夫々示される位置を経由して誘導路104から一般道路102に出ると、以降は当該一般道路102に対してマップマッチング処理が実行された結果、当該マッチング状態が一般道路102に対してオンロード状態となり(図2ステップS7;YES乃至ステップS13参照)、以降一般道路102上に正しく現在位置マークM9乃至M11が表示されることとなる。
【0047】
なお、実施形態に係るマッチング処理が実行されない従来の場合では、道路種別変更制限処理の実行が解除されることがないため、マッチング状態としては、元の高速道路100(すなわち、オフロード状態となる直前にマップマッチングされていた道路と同じ種類の道路)上に現在位置をマップマッチングさせるように制御され続ける。この結果として、例えば図3に二点鎖線の現在位置マークX1及びX2で示される位置に当該現在位置マークが誤って表示され得ることとなる。
【0048】
次に、上記ステップS15としての道路種別変更制限処理の復帰の態様について、具体的に説明する。当該復帰態様としては、以下に示す四通りのものが考えられる。
【0049】
先ず第一の復帰態様としては、道路種別変更制限処理を解除した後(図2ステップS5参照)、マッチング状態が再びオンロード状態となった(図2ステップS13参照)タイミングで直ちに道路種別変更制限処理を復帰させる態様である。
【0050】
次に第二の復帰態様としては、道路種別変更制限処理が解除された後(図2ステップS5参照)にマッチング状態が再びオンロード状態となり(図2ステップS13参照)、更に当該オンロード状態で予め設定された距離を進行する間にオフロード状態とならなかった場合、道路種別変更制限処理を復帰させる態様である。
【0051】
更に第三の復帰態様としては、道路種別変更制限処理が解除された後(図2ステップS5参照)にマッチング状態が再びオンロード状態となり(図2ステップS13参照)、更に当該オンロード状態で予め設定された距離を進行する間にオフロード状態とならず且つGPS測位部11における測位に用いられるいわゆるGPS誤差円から現在位置が逸脱しなかった場合、道路種別変更制限処理を復帰させる態様である。この第三の復帰態様は、上記第二の復帰態様に対して更に条件付けをした態様である。
【0052】
なお、上記第二及び第三の復帰態様とする場合、図2に示した処理と並行して、マッチング状態が再びオンロード状態となった以降の移動距離を別途積算しておく処理が必要となる。
【0053】
最後に第四の復帰態様としては、マッチング状態がオフロード状態となった後にマップマッチングされた道路が当該オフロード状態となる直前にマップマッチングされていた道路と異なる場合であって、夫々の道路の進行方向又は距離が予め設定された閾値角度又は閾値距離だけ離れた場合に、道路種別変更制限処理を復帰させる態様である。この第四の復帰態様とする場合は、図2に示した処理と並行して、マッチング状態が再びオンロード状態となった以降の当該進行方向の角度差又は道路間の距離を別途算出する処理が必要となる。
【0054】
以上説明したように、実施形態のナビゲーション装置Sにおけるマップマッチング処理によれば、オフロード状態となった車両の位置を再度いずれかの道路上にマップマッチングさせるに当たりオフロード状態と検出される直前にマップマッチングされていた道路と同じ種類の道路に優先的にマップマッチングさせる制御が行われてる場合において、オフロード状態であると検出されている間にETCシステムとの通信が行われたときその制御の実行を禁止(解除)するので、当該通信が行われた以降の車両の位置と道路とのマップマッチングを、それまでに位置していた道路の種類に捕らわれることなくその後の当該位置の検出状況等に応じて適切に行うことができる。
【0055】
より具体的には、例えばスマートIC103を通過した旨の検出が、現在位置の検出処理に係る時間遅延等に起因する誤検出であり、実際はサービスエリア101からスマートIC103の近傍を通過して再び高速道路100に戻っているような場合であっても、その後のマップマッチング処理において迅速に且つ正しく高速道路100上にマップマッチングする状態とすることができる。
【0056】
従って、スマートIC103を含むETCシステムを経由して種類が異なる道路間を相互に遷移する場合において、より適切に車両の位置と道路とのマップマッチングを行うことができる。
【0057】
また、有料道路(高速道路100)からETCシステムとの通信を行った後に一般道路102を走行することとなった場合でも、当該有料道路(高速道路100)に優先的にマップマッチングを行うように制御されることが禁止されるので、より迅速に一般道路102上へのマップマッチングに移行させることができる。
【0058】
なお、本実施形態によれば、上記有料道路(高速道路100)と一般道路102とを入れ換えることで、スマートIC以外の通常のETC料金所の如く、一般道路102からETCシステムとの通信を行った後に有料道路(高速道路100)を走行することとなった場合でも、一般道路102に優先的にマップマッチングを行うように制御されることが禁止されるので、より迅速に当該有料道路(高速道路100)上へのマップマッチングに移行させることができる。
【0059】
また、上述した道路種別変更制限処理の復帰態様につき、第一乃至第四の復帰態様のいずれによる場合でも、新たにマップマッチングされた道路に対するマップマッチングを良好に行うことができる。
【0060】
なお、上述した実施形態では、車両に搭載されたナビゲーション装置Sに対して本願を適用した場合について説明したが、これ以外に、自動二輪車等、車両以外の移動体に対してマップマッチング及びETCシステムとの通信の双方を行いつつ案内処理を行う場合に本願を適用することも勿論可能である。
【0061】
更に、図2に示すフローチャートに相当するプログラムを、フレキシブルディスク又はハードディスク等の情報記録媒体に記録しておき、又はインターネット等を介して取得して記録しておき、これらを汎用のコンピュータで読み出して実行することにより、当該コンピュータを実施形態に係るマッチング処理部21として活用することも可能である。
【図面の簡単な説明】
【0062】
【図1】実施形態に係るナビゲーション装置の概要構成を示すブロック図である。
【図2】実施形態に係るマップマッチング処理を示すフローチャートである。
【図3】実施形態に係るマップマッチング処理を概念的に説明する図である。
【符号の説明】
【0063】
1 自車位置検出部
2 処理部
3 HDD部
4 ディスク記録再生部
5 音声出力部
6 画像表示部
7 操作部
8 ETC通信部
11 GPS測位部
12 自立的位置検出部
20 自車位置演算部
21 マッチング処理部
50 高速道路データ
51 誘導路データ
52 一般道路データ
53 移動経路
100 高速道路
104、105 誘導路
101 サービスエリア
103 スマートIC
102 一般道路
S ナビゲーション装置
M1、M2、M3、M4、M5、M6、M7、M8、M9、M10、X1、X2 現在位置マーク
【技術分野】
【0001】
本願は、マッチング装置及びマッチング方法並びにマッチング装置用プログラム及び情報記録媒体の技術分野に属し、より詳細には、移動体の位置と、その移動体が移動しているはずの道路と、の整合を図るマッチング装置及びマッチング方法並びに当該マッチング装置用のプログラム並びに当該プログラムが記録されている情報記録媒体の技術分野に属する。
【背景技術】
【0002】
従来、GPS(Global Positioning System)や自律航法によって自車の現在位置を測位し、表示画面上の道路地図の上に自車位置マークを重ねて表示することにより車両を誘導するナビゲーション装置が知られている。このようなナビゲーション装置は、現在位置の測位誤差に起因して自車位置が地図上の道路から外れた場合に、自車位置を修正して近くの道路上に移動させる「マップマッチング」と呼ばれる機能を有する。
【0003】
一方、近年、「スマートIC(Inter-Change)」と呼ばれる、通常のインターチェンジ以外の地点、例えば高速道路に設けられたサービスエリアやパーキングエリア等において一般道路との間で出入りを可能にしたETC(Electronic Toll Collection system:自動料金収受システム)専用の出入口の実用化が一部の高速道路等において開始されている。このスマートICは、ETC専用のゲートしか備えていない点で、ETCゲートと一般ゲートとを備えた通常のインターチェンジとは異なる。
【0004】
そして、通常は高速道路から一般道路へ出るためにはインターチェンジを通る必要があるが、例えばサービスエリアやパーキングエリアにスマートICが設置されると、そのサービスエリアやパーキングエリアから直接に一般道路に出ることができる。このようなスマートICは、現在段階的に運用が開始されているが、将来的には広く一般化して設置個所も増えると考えられる。
【0005】
ところが、現状のナビゲーション装置では、地図データ上で高速道路と一般道路とが接続されていない場合、マップマッチングの誤作動を避けるために、高速道路にマッチングした状態から一般道路にマッチングする状態への変更をし難くする処理(以下、当該処理を道路種別変更制限処理と称する)が実行される。そのため、例えばスマートICが設置された場所において高速道路と一般道路とが接続されていない地図データを使用するナビゲーション装置では、実際にはスマートICを通過して一般道路を走行しているにも拘わらず、上記道路種別変更制限処理により一般道路にマッチングする状態に変更され難いという問題が発生する。また、スマートICに係る道路データが存在する場合でも、自車の現在位置を自立的に検出する自立センサにおける移動距離測定の誤差等に起因してスマートICに係る道路データ上にマッチングできなかった場合や、当該道路データ自体の位置が正しく整備されていない場合にも、同様の問題が発生する。
【0006】
この問題点を解決するための一方策として、例えば下記特許文献1に開示されている技術がある。この特許文献1に開示されている技術では、高速道路からスマートICを通過して一般道路に出た場合、そのスマートICを通過したことが検出された時点で強制的に一般道路にマッチングする状態となるように制御する構成とされている。
【特許文献1】特開2006−242846号公報(第4図等)
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上述した特許文献1に開示されている技術では、高速道路からサービスエリア等を経てスマートICを通過したことが検出された後には、強制的に一般道路にマッチングする状態となるように制御されるため、例えばスマートICの通過検出が自車位置等の検出処理に係る時間遅延等に起因する誤検出であり、実際はサービスエリア等からスマートICの近傍を通過して再び高速道路に戻っているような場合、その後のマッチング処理において長い期間高速道路上にマッチングする状態とされないという問題点を生じる。
【0008】
ここで、当該誤検出は、サービスエリア等内の道路とスマートICとが通常近接して設置されているものであるため十分に起こり得るものである。また、高速道路に戻ったにも拘わらず長い期間当該高速道路上にマッチングする状態とされないことは、例えばスマートICにより接続されている一般道路と高速道路とが並行して(或いは上下に分かれて)いる場合等当該高速道路と一般道路とが峻別し難い状態にある場合において、自車位置検出精度の誤差が著しく拡大するという問題点に繋がるものである。
【0009】
そこで、本願は上記の各問題点に鑑みて為されたもので、その課題は、スマートICを経由して高速道路から一般道路に移行する場合、又はその逆の場合の双方において、より適切にマッチング処理を行って自車位置検出の精度を維持/向上させることが可能なマッチング装置及びマッチング方法並びに当該マッチング装置用のプログラムを提供することにある。
【課題を解決するための手段】
【0010】
上記の課題を解決するために、請求項1に記載の発明は、車両等の移動体の位置が道路外となったか否かを検出するマッチング処理部等の道路外検出手段と、前記移動体の位置が道路外であると検出された場合に前記移動体の位置をいずれかの道路上に整合させるマッチング処理部等の整合手段と、前記整合手段による整合に当たり、前記移動体の位置が道路外と検出される直前に整合されていた道路と同じ種類の道路に優先的に前記移動体の位置を整合させるように前記整合手段を制御する制御部等の制御手段と、前記移動体の位置が道路外であると検出されている間に、自動料金収受システムとの間で通信が行われたか否かを判定する制御部等の判定手段と、前記移動体の位置が道路外であると検出されている間に前記通信が行われたとき、前記制御手段による前記整合手段に対する前記制御の実行を禁止する制御部等の禁止手段と、を備える。
【0011】
上記の課題を解決するために、請求項6に記載の発明は、車両等の移動体の位置が道路外となったか否かを検出するマッチング処理部等の道路外検出手段と、前記移動体の位置が道路外であると検出された場合に前記移動体の位置をいずれかの道路上に整合させるマッチング処理部等の整合手段と、当該整合に当たり前記移動体の位置が道路外と検出される直前に整合されていた道路と同じ種類の道路に優先的に前記移動体の位置を整合させるように前記整合手段を制御する制御部等の制御手段と、を備えるマッチング装置において実行されるマッチング方法において、前記移動体の位置が道路外であると検出されている間に、自動料金収受システムとの間で通信が行われたか否かを判定する判定工程と、前記移動体の位置が道路外であると検出されている間に前記通信が行われたとき、前記制御手段による前記整合手段に対する前記制御の実行を禁止する禁止工程と、を含む。
【0012】
上記の課題を解決するために、請求項7に記載の発明は、コンピュータを、請求項1から5のいずれか一項に記載のマッチング装置として機能させる。
【0013】
上記の課題を解決するために、請求項8に記載の発明は、請求項7に記載の前記マッチング装置用プログラムが、前記コンピュータにより読み取り可能に記録されている。
【発明を実施するための最良の形態】
【0014】
次に、本願を実施するための最良の形態について、図1乃至図3を用いて説明する。なお、以下に説明する実施形態は、車両の運行を案内するナビゲーション装置に含まれて道路と自車位置との整合を図るマップマッチング機能を有するマッチング装置に対して本願を適用した場合の実施の形態である。
【0015】
また、図1は実施形態に係るナビゲーション装置の概要構成を示すブロック図であり、図2は当該ナビゲーション装置において実行される実施形態に係るマップマッチング処理を示すフローチャートであり、図3は当該マップマッチング処理を概念的に説明する図である。
【0016】
図1に示すように、実施形態に係るナビゲーション装置Sは、車両に搭載されてその運行を案内するものであり、具体的には、距離検出手段としての自車位置検出部1と、処理部2と、HDD(Hard Disc Drive)部3と、ディスク記録再生部4と、図示しないスピーカ及び増幅部等からなる音声出力部5と、液晶ディスプレイ等である図示しないディスプレイ及び画像処理部等からなる画像表示部6と、図示しないボタン操作部及びタッチパネル並びにリモートコントローラ等からなる操作部7と、アンテナ80を介して図示しないETCとの間の通信を行うETC通信部8と、により構成されている。これら自車位置検出部1、処理部2、HDD部3、ディスク記録再生部4、音声出力部5、画像表示部6、操作部7及びETC通信部8は、バス9により相互にデータの授受が可能に接続されている。
【0017】
一方、自車位置検出部1は、宇宙空間に打ち上げられている図示しないGPS(Global Positioning System)航法衛星からの航法電波を受信するアンテナ10に接続された位置検出手段としてのGPS測位部11と、図示しない速度センサ及び加速度センサ等からなる自立的位置検出部12と、により構成されている。
【0018】
更に処理部2は、自車位置演算部20と、道路外検出手段及び整合手段としてのマッチング処理部21と、案内処理部22と、制御手段、判定手段及び禁止手段としての処理制御部23と、により構成されている。
【0019】
次に、実施形態に係るナビゲーション装置Sの概要動作について説明する。
【0020】
GPS測位部11は、アンテナ10を介して受信した上記航法電波に含まれている位置情報等に基づき、ナビゲーション装置Sが備えられている自車の絶対位置としての緯度/経度及び高度を算出し、バス9を介して処理部2の自車位置演算部20に出力する。
【0021】
一方、自立的位置検出部12は、上記各センタからの出力値に基づき、予め設定された起点(例えば出発地点)からの自車の移動距離及び移動方位並びに回転角度等を自立的に算出し、当該算出結果をバス9を介して自車位置演算部20に出力する。
【0022】
これらにより、自車位置演算部20は、処理制御部23の制御の下、主として自立的位置検出部12から出力されて来た移動距離データ等を用い、その補正等の用途にGPS測位部11から出力されて来た緯度/経度等を示す情報を用いつつ、自車の現在位置(以下単に現在位置と称する)を演算し、当該演算された現在位置を示す現在位置データをマッチング処理部21に出力する。
【0023】
他方、HDD部3内の図示しないハードディスクには、地図データとして、道路を示す道路データや交差点又は地物を示す交差点データ等が蓄積されており、必要に応じて当該各データがバス9を介して読み出し可能とされている。
【0024】
そして、マッチング処理部21は、処理制御部23の制御の下、当該現在位置に相当する現在位置データとHDD部3内の上記ハードディスクから読み出される道路データとに基づき、後述する実施形態に係るマップマッチング処理(すなわち、上記現在位置データを、それにより示される現在位置に対応する道路を示す道路データに整合させるマップマッチング処理)を実行し、その結果を案内処理部22に出力する。
【0025】
最後に、案内処理部22は、処理制御部23の制御の下、上記ハードディスク内に記憶されている上記交差点データ等と、マッチング処理部21から出力されるマップマッチング処理の結果と、を用いて、ナビゲーション装置Sとして求められている案内処理(例えば出発前に操作部7を用いて設定された経路に沿った案内処理、又は現在位置が当該経路から逸脱した場合の復帰のための案内処理等)のために必要な画像及び音声に夫々相当する画像データ及び音声データを生成し、バス9を介して音声出力部5又は画像表示部6に出力する。そして、当該音声データが音声出力部5から出力され、或いは当該画像データが画像表示部6において表示されることにより、車両の運転者に対して必要な案内が提供される。
【0026】
これらの動作と並行して、処理制御部23は、上記自車位置演算部20、マッチング処理部21及び案内処理部22夫々の動作を統括制御すると共に、処理部2と他の構成部材とのバス9を介したデータの授受を制御する。
【0027】
他方、ETC通信部8は、通常のETC料金所(有人料金所と、これに併設されているETC用料金所と、を備えるETC料金所)又は上記スマートICにおいて、ETCとの間における通行料金の精算に係る通信処理を実行する。この通信結果については、例えば必要となった通行料金等を音声出力部5を介して運転者に告知するように構成するのが好適である。
【0028】
また、ディスク記録再生部4は、例えば更新された道路データを記録する光ディスク40が装填されたとき、当該装填された光ディスク40から更新用の道路データを読み出してHDD部3に出力したり、或いは音楽が記録されている光ディスク40が装填されたとき、当該装填された光ディスク40から当該音楽に相当する音楽データを再生して音声出力部5に出力する等の処理を実行する。
【0029】
更に、操作部7においては、上述した出発前の経路設定のための操作が実行される他、画像表示部6における地図の表示態様を変更するための操作や、音声出力部5からの音声出力に係る音量の調整等の操作が実行される。
【0030】
次に、ナビゲーション装置Sにおける案内処理の一部としての実施形態に係るマップマッチング処理について、具体的に図2及び図3を用いて説明する。なお、当該マップマッチング処理は、ナビゲーション装置Sにおける上記案内処理の一部として、主としてマッチング処理部21及び処理制御部23を中心として、当該ナビゲーション装置Sの電源がオフとされるまでサブルーチンとして常に実行されている処理である。
【0031】
当該マップマッチング処理を行うマッチング処理部21は、図2に示すように、先ず自車位置演算部20を介して自車位置検出部1又はGPS測位部11において生成された上記移動距離データを取得し(ステップS1)、更に現在オンロード状態、すなわちマップマッチングが成されている状態であるか否かを従来と同様の方法により確認する(ステップS2)。このステップS2の確認処理として具体的には、例えば、マッチング処理部21内の図示しないマッチングフラグの内容を確認する等の方法により実行される。
【0032】
そして、現在オンロード状態であると確認されたとき(ステップS2;YES)、マッチング処理部21は、検出されている現在位置に対応する道路データをバス9を介してHDD部3から取得し(ステップS3)、後述するマッチング相関値の算出処理に移行する。
【0033】
一方、ステップS2の判定において、現在オンロード状態でないとき(ステップS2;NO)、処理制御部23は次に、ETC通信部8を介したETCとの間の通信が、例えばスマートIC又は通常のETC料金所において実行されたか否かをETC通信部8において確認する(ステップS4)。そして、ETCとの通信が実行されたことが確認されたとき(ステップS4;YES)、処理制御部23は、マッチング処理部21における道路種別変更制限処理の実行を一旦解除し、当該マッチング処理21を道路種別に無関係に最もマッチング条件の最も良い道路に現在位置をマッチングさせる状態として(ステップS5)、後述するステップS6の処理に移行する。この時、当該解除処理は、例えば、現在当該道路種別変更制限処理が実行状態であるか否かを示すマッチング処理部21内の図示しないフラグを、「制限処理解除」を示す値に変更する等の処理として実現される。
【0034】
なお、実施形態に係る道路種別変更制限処理としては、背景技術として示した高速道路から一般道路に遷移する場合の他、この逆の一般道路から高速道路に遷移する場合を含め、マッチング状態がオフロード状態からオンロード状態となったとき、当該オフロード状態になる直前にマップマッチングされていた道路と同じ種類の道路に優先的にマップマッチングさせるように道路種別の変更を制限する場合を広く含むものとする。
【0035】
他方、ステップS4の確認において未だETCとの通信実行が処理制御部23により確認されないときは(ステップS4;NO)、次にマッチング処理部21は、上記道路種別変更制限処理を実行しつつ、現在位置の周辺にある道路をHDD部3に記録されている道路データ内において探索する(ステップS6)。
【0036】
次にマッチング処理部21は、上記道路種別変更制限処理が現在解除されている状態(上記ステップS5参照)であるか否かを、マッチング処理部21内の上記フラグの値を確認すること等により確認する(ステップS7)。そして、当該道路種別変更制限処理が現在解除されていない状態であると確認されたとき(ステップS7;NO)、マッチング処理部21は、上記ステップS2の判定においてオンロード状態でない(ステップS2;NO。すなわち、オフロード状態である)と判定された直前まで自車の位置がマッチングされていた道路と同じ種別(例えば当該道路が種別として「高速道路」であれば、これと同じ「高速道路」)の道路に相当する道路データを、上記ステップS6における探索結果の中から抽出/取得する(ステップS8)。その後マッチング処理部21は、当該抽出/取得した道路データに相当する道路と現在位置とのマッチング相関値を、従来と同様の方法により算出する(ステップS10)。
【0037】
一方、ステップS7の判定において、道路種別変更制限処理が現在解除されている状態であると確認されたとき(ステップS7;YES)、マッチング処理部21は、上記ステップS6における探索結果に含まれる全ての道路データを取得する(ステップS9)。その後マッチング処理部21は、当該取得した道路データに相当する各道路と現在位置とのマッチング相関値を、夫々の当該道路について従来と同様の方法により算出する(ステップS10)。
【0038】
次にマッチング処理部21は、上記ステップS10の処理の結果として、算出されたマッチング相関値がマッチング処理部21におけるマップマッチング処理として予め設定されている閾値を越えているものがあるか否か、すなわち、現在位置をマッチングさせるのに好適な道路があるか否か、を確認する(ステップS11)。そしてマッチング処理部21は、当該好適な道路がないときは(ステップS11;NO)、マップマッチングが可能な道路がないとして現在のマッチング状態をオフロード状態とし(ステップS12)、後述するステップS14の処理に移行する。一方、ステップS11の判定において、マップマッチングに好適な道路が存在していたとき(ステップS11;YES)、マッチング処理部21は、当該好適な道路に対して現在位置をマップマッチングさせつつ現在のマッチング状態をオンロード状態とする(ステップS13)。
【0039】
その後マッチング処理部21は、マッチング状態をオンロード状態又はオフロード状態のいずれかとしつつ、ステップS1において取得した移動距離に対応して現在位置を移動させる(ステップS14)。
【0040】
最後に処理制御部23は、道路種別変更制限処理が現在解除されている状態であるときは(上記ステップS7;YES参照)、それを復帰させる(すなわち道路種別変更制限処理を実行状態とする)処理を行い(ステップS15)、その後ナビゲーション装置Sの案内処理としてのメイン処理に移行する。なお、上記ステップS15における処理に係る復帰条件等については、後ほど詳説する。また、当該復帰条件のいずれにも該当しない場合には、上記ステップS12又はS13のいずれか一方で設定したマッチング状態のまま、ナビゲーション装置Sの案内処理としてのメイン処理に移行する。
【0041】
次に、図2に示したステップS1乃至S13の処理が実行された場合における実際の現在位置マーク(すなわち、画像表示部6において表示される、自車の現在位置を示す現在位置マーク)の表示上の動き等について、図3を用いて例示する。
【0042】
なお図3では、実際の高速道路及びそれに付随するスマートICの一例として、植え込み106により区切られた誘導路105により高速道路100に接続されたサービスエリア101があり、更にその端部にスマートIC103が設置され、当該スマートIC103を通過した車両が誘導路104を経て一般道路102に出ることが可能な場合を例示している。
【0043】
また、当該例示される場合に相当する道路データとしては、図3において実線で示される高速道路データ(高速道路100自体及びサービスエリア101に相当する高速道路データ)50が図3において破線で示される誘導路データ(誘導路104に相当する誘導路データ)51に接続され、更に当該誘導路データ51が図3において一点鎖線で示される一般道路データ(一般道路102に相当する一般道路データ)52に接続されている。また図3においては、高速道路100からスマートIC103を抜けて一般道路102にでる車両の実際の移動経路53を点線で例示している。
【0044】
図3に示す場合において、高速道路100を走行中の車両がスマートIC103を介して一般道路102に出るために、現在位置マークM1で示される位置から誘導路105を経てサービスエリア101に入ると、その車両におけるマッチング状態はオフロード状態となる(図2ステップS;NO参照)。そしてこのマッチング状態のまま現在位置マークM2乃至M6で夫々示される位置を経由してスマートIC103に接近すると、当該スマートIC103におけるETCとの通信が開始される(図2ステップS4;YES参照)。
【0045】
次に、当該通信が開始されると、実施形態に係るマッチング処理として上記道路種別変更制限処理の実行が一旦解除される(図2ステップS5参照)。これにより、当該車両のマッチング状態としては、道路種別に無関係に、以降において最もマッチング条件の良い道路(図3に例示する場合では高速道路100又は一般道路102のいずれか一方)に現在位置をマッチングさせ得る状態となる。
【0046】
その後、道路種別変更制限処理の実行が解除された状態で車両が現在位置マークM7及びM8で夫々示される位置を経由して誘導路104から一般道路102に出ると、以降は当該一般道路102に対してマップマッチング処理が実行された結果、当該マッチング状態が一般道路102に対してオンロード状態となり(図2ステップS7;YES乃至ステップS13参照)、以降一般道路102上に正しく現在位置マークM9乃至M11が表示されることとなる。
【0047】
なお、実施形態に係るマッチング処理が実行されない従来の場合では、道路種別変更制限処理の実行が解除されることがないため、マッチング状態としては、元の高速道路100(すなわち、オフロード状態となる直前にマップマッチングされていた道路と同じ種類の道路)上に現在位置をマップマッチングさせるように制御され続ける。この結果として、例えば図3に二点鎖線の現在位置マークX1及びX2で示される位置に当該現在位置マークが誤って表示され得ることとなる。
【0048】
次に、上記ステップS15としての道路種別変更制限処理の復帰の態様について、具体的に説明する。当該復帰態様としては、以下に示す四通りのものが考えられる。
【0049】
先ず第一の復帰態様としては、道路種別変更制限処理を解除した後(図2ステップS5参照)、マッチング状態が再びオンロード状態となった(図2ステップS13参照)タイミングで直ちに道路種別変更制限処理を復帰させる態様である。
【0050】
次に第二の復帰態様としては、道路種別変更制限処理が解除された後(図2ステップS5参照)にマッチング状態が再びオンロード状態となり(図2ステップS13参照)、更に当該オンロード状態で予め設定された距離を進行する間にオフロード状態とならなかった場合、道路種別変更制限処理を復帰させる態様である。
【0051】
更に第三の復帰態様としては、道路種別変更制限処理が解除された後(図2ステップS5参照)にマッチング状態が再びオンロード状態となり(図2ステップS13参照)、更に当該オンロード状態で予め設定された距離を進行する間にオフロード状態とならず且つGPS測位部11における測位に用いられるいわゆるGPS誤差円から現在位置が逸脱しなかった場合、道路種別変更制限処理を復帰させる態様である。この第三の復帰態様は、上記第二の復帰態様に対して更に条件付けをした態様である。
【0052】
なお、上記第二及び第三の復帰態様とする場合、図2に示した処理と並行して、マッチング状態が再びオンロード状態となった以降の移動距離を別途積算しておく処理が必要となる。
【0053】
最後に第四の復帰態様としては、マッチング状態がオフロード状態となった後にマップマッチングされた道路が当該オフロード状態となる直前にマップマッチングされていた道路と異なる場合であって、夫々の道路の進行方向又は距離が予め設定された閾値角度又は閾値距離だけ離れた場合に、道路種別変更制限処理を復帰させる態様である。この第四の復帰態様とする場合は、図2に示した処理と並行して、マッチング状態が再びオンロード状態となった以降の当該進行方向の角度差又は道路間の距離を別途算出する処理が必要となる。
【0054】
以上説明したように、実施形態のナビゲーション装置Sにおけるマップマッチング処理によれば、オフロード状態となった車両の位置を再度いずれかの道路上にマップマッチングさせるに当たりオフロード状態と検出される直前にマップマッチングされていた道路と同じ種類の道路に優先的にマップマッチングさせる制御が行われてる場合において、オフロード状態であると検出されている間にETCシステムとの通信が行われたときその制御の実行を禁止(解除)するので、当該通信が行われた以降の車両の位置と道路とのマップマッチングを、それまでに位置していた道路の種類に捕らわれることなくその後の当該位置の検出状況等に応じて適切に行うことができる。
【0055】
より具体的には、例えばスマートIC103を通過した旨の検出が、現在位置の検出処理に係る時間遅延等に起因する誤検出であり、実際はサービスエリア101からスマートIC103の近傍を通過して再び高速道路100に戻っているような場合であっても、その後のマップマッチング処理において迅速に且つ正しく高速道路100上にマップマッチングする状態とすることができる。
【0056】
従って、スマートIC103を含むETCシステムを経由して種類が異なる道路間を相互に遷移する場合において、より適切に車両の位置と道路とのマップマッチングを行うことができる。
【0057】
また、有料道路(高速道路100)からETCシステムとの通信を行った後に一般道路102を走行することとなった場合でも、当該有料道路(高速道路100)に優先的にマップマッチングを行うように制御されることが禁止されるので、より迅速に一般道路102上へのマップマッチングに移行させることができる。
【0058】
なお、本実施形態によれば、上記有料道路(高速道路100)と一般道路102とを入れ換えることで、スマートIC以外の通常のETC料金所の如く、一般道路102からETCシステムとの通信を行った後に有料道路(高速道路100)を走行することとなった場合でも、一般道路102に優先的にマップマッチングを行うように制御されることが禁止されるので、より迅速に当該有料道路(高速道路100)上へのマップマッチングに移行させることができる。
【0059】
また、上述した道路種別変更制限処理の復帰態様につき、第一乃至第四の復帰態様のいずれによる場合でも、新たにマップマッチングされた道路に対するマップマッチングを良好に行うことができる。
【0060】
なお、上述した実施形態では、車両に搭載されたナビゲーション装置Sに対して本願を適用した場合について説明したが、これ以外に、自動二輪車等、車両以外の移動体に対してマップマッチング及びETCシステムとの通信の双方を行いつつ案内処理を行う場合に本願を適用することも勿論可能である。
【0061】
更に、図2に示すフローチャートに相当するプログラムを、フレキシブルディスク又はハードディスク等の情報記録媒体に記録しておき、又はインターネット等を介して取得して記録しておき、これらを汎用のコンピュータで読み出して実行することにより、当該コンピュータを実施形態に係るマッチング処理部21として活用することも可能である。
【図面の簡単な説明】
【0062】
【図1】実施形態に係るナビゲーション装置の概要構成を示すブロック図である。
【図2】実施形態に係るマップマッチング処理を示すフローチャートである。
【図3】実施形態に係るマップマッチング処理を概念的に説明する図である。
【符号の説明】
【0063】
1 自車位置検出部
2 処理部
3 HDD部
4 ディスク記録再生部
5 音声出力部
6 画像表示部
7 操作部
8 ETC通信部
11 GPS測位部
12 自立的位置検出部
20 自車位置演算部
21 マッチング処理部
50 高速道路データ
51 誘導路データ
52 一般道路データ
53 移動経路
100 高速道路
104、105 誘導路
101 サービスエリア
103 スマートIC
102 一般道路
S ナビゲーション装置
M1、M2、M3、M4、M5、M6、M7、M8、M9、M10、X1、X2 現在位置マーク
【特許請求の範囲】
【請求項1】
移動体の位置が道路外となったか否かを検出する道路外検出手段と、
前記移動体の位置が道路外であると検出された場合に前記移動体の位置をいずれかの道路上に整合させる整合手段と、
前記整合手段による整合に当たり、前記移動体の位置が道路外と検出される直前に整合されていた道路と同じ種類の道路に優先的に前記移動体の位置を整合させるように前記整合手段を制御する制御手段と、
前記移動体の位置が道路外であると検出されている間に、自動料金収受システムとの間で通信が行われたか否かを判定する判定手段と、
前記移動体の位置が道路外であると検出されている間に前記通信が行われたとき、前記制御手段による前記整合手段に対する前記制御の実行を禁止する禁止手段と、
を備えることを特徴とするマッチング装置。
【請求項2】
請求項1に記載のマッチング装置において、
前記制御手段は、前記制御の実行を禁止した後、前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合されたとき、前記制御の実行禁止を解除して当該制御を復帰させることを特徴とするマッチング装置。
【請求項3】
請求項1に記載のマッチング装置において、
前記移動体の移動距離を検出する距離検出手段を更に備え、
前記制御手段は、前記制御の実行を禁止した後、前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合され、更に当該新たに整合された道路上を前記移動体が予め設定された距離だけ道路外となることなく移動したことが検出されたとき、前記制御の実行禁止を解除して当該制御を復帰させることを特徴とするマッチング装置。
【請求項4】
請求項1に記載のマッチング装置において、
前記移動体の移動距離を検出する距離検出手段と、
航法電波を受信して前記位置を検出する位置検出手段と、
を更に備え、
前記制御手段は、前記制御の実行を禁止した後、前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合され、更に当該新たに整合された道路上であって前記位置検出手段による位置検出に係る誤差範囲内を前記移動体が予め設定された距離だけ移動したことが検出されたとき、前記制御の実行禁止を解除して当該制御を復帰させることを特徴とするマッチング装置。
【請求項5】
請求項1に記載のマッチング装置において、
前記制御手段により前記制御の実行を禁止した後、更に前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合された以降、当該新たに整合された道路と、前記移動体の位置が道路外と検出される直前に整合されていた前記道路と、が異なるか否かを検出する道路異同検出手段を更に備え、
前記制御手段は、前記制御の実行を禁止した後、前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合され、更に当該新たに整合された道路と、前記移動体の位置が道路外と検出される直前に整合されていた道路と、が異なることが前記道路異同検出手段により検出されたとき、前記制御の実行禁止を解除して当該制御の復帰させることを特徴とするマッチング装置。
【請求項6】
移動体の位置が道路外となったか否かを検出する道路外検出手段と、前記移動体の位置が道路外であると検出された場合に前記移動体の位置をいずれかの道路上に整合させる整合手段と、当該整合に当たり前記移動体の位置が道路外と検出される直前に整合されていた道路と同じ種類の道路に優先的に前記移動体の位置を整合させるように前記整合手段を制御する制御手段と、を備えるマッチング装置において実行されるマッチング方法において、
前記移動体の位置が道路外であると検出されている間に、自動料金収受システムとの間で通信が行われたか否かを判定する判定工程と、
前記移動体の位置が道路外であると検出されている間に前記通信が行われたとき、前記制御手段による前記整合手段に対する前記制御の実行を禁止する禁止工程と、
を含むことを特徴とするマッチング方法。
【請求項7】
コンピュータを、請求項1から5のいずれか一項に記載のマッチング装置として機能させることを特徴とするマッチング装置用プログラム。
【請求項8】
請求項7に記載の前記マッチング装置用プログラムが、前記コンピュータにより読み取り可能に記録されていることを特徴とする情報記録媒体。
【請求項1】
移動体の位置が道路外となったか否かを検出する道路外検出手段と、
前記移動体の位置が道路外であると検出された場合に前記移動体の位置をいずれかの道路上に整合させる整合手段と、
前記整合手段による整合に当たり、前記移動体の位置が道路外と検出される直前に整合されていた道路と同じ種類の道路に優先的に前記移動体の位置を整合させるように前記整合手段を制御する制御手段と、
前記移動体の位置が道路外であると検出されている間に、自動料金収受システムとの間で通信が行われたか否かを判定する判定手段と、
前記移動体の位置が道路外であると検出されている間に前記通信が行われたとき、前記制御手段による前記整合手段に対する前記制御の実行を禁止する禁止手段と、
を備えることを特徴とするマッチング装置。
【請求項2】
請求項1に記載のマッチング装置において、
前記制御手段は、前記制御の実行を禁止した後、前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合されたとき、前記制御の実行禁止を解除して当該制御を復帰させることを特徴とするマッチング装置。
【請求項3】
請求項1に記載のマッチング装置において、
前記移動体の移動距離を検出する距離検出手段を更に備え、
前記制御手段は、前記制御の実行を禁止した後、前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合され、更に当該新たに整合された道路上を前記移動体が予め設定された距離だけ道路外となることなく移動したことが検出されたとき、前記制御の実行禁止を解除して当該制御を復帰させることを特徴とするマッチング装置。
【請求項4】
請求項1に記載のマッチング装置において、
前記移動体の移動距離を検出する距離検出手段と、
航法電波を受信して前記位置を検出する位置検出手段と、
を更に備え、
前記制御手段は、前記制御の実行を禁止した後、前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合され、更に当該新たに整合された道路上であって前記位置検出手段による位置検出に係る誤差範囲内を前記移動体が予め設定された距離だけ移動したことが検出されたとき、前記制御の実行禁止を解除して当該制御を復帰させることを特徴とするマッチング装置。
【請求項5】
請求項1に記載のマッチング装置において、
前記制御手段により前記制御の実行を禁止した後、更に前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合された以降、当該新たに整合された道路と、前記移動体の位置が道路外と検出される直前に整合されていた前記道路と、が異なるか否かを検出する道路異同検出手段を更に備え、
前記制御手段は、前記制御の実行を禁止した後、前記整合手段により前記移動体の位置がいずれかの道路上に新たに整合され、更に当該新たに整合された道路と、前記移動体の位置が道路外と検出される直前に整合されていた道路と、が異なることが前記道路異同検出手段により検出されたとき、前記制御の実行禁止を解除して当該制御の復帰させることを特徴とするマッチング装置。
【請求項6】
移動体の位置が道路外となったか否かを検出する道路外検出手段と、前記移動体の位置が道路外であると検出された場合に前記移動体の位置をいずれかの道路上に整合させる整合手段と、当該整合に当たり前記移動体の位置が道路外と検出される直前に整合されていた道路と同じ種類の道路に優先的に前記移動体の位置を整合させるように前記整合手段を制御する制御手段と、を備えるマッチング装置において実行されるマッチング方法において、
前記移動体の位置が道路外であると検出されている間に、自動料金収受システムとの間で通信が行われたか否かを判定する判定工程と、
前記移動体の位置が道路外であると検出されている間に前記通信が行われたとき、前記制御手段による前記整合手段に対する前記制御の実行を禁止する禁止工程と、
を含むことを特徴とするマッチング方法。
【請求項7】
コンピュータを、請求項1から5のいずれか一項に記載のマッチング装置として機能させることを特徴とするマッチング装置用プログラム。
【請求項8】
請求項7に記載の前記マッチング装置用プログラムが、前記コンピュータにより読み取り可能に記録されていることを特徴とする情報記録媒体。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−264836(P2009−264836A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−112887(P2008−112887)
【出願日】平成20年4月23日(2008.4.23)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月23日(2008.4.23)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]