
マップマッチング装置、マップマッチング方法及びそのプログラム
【課題】携帯端末によって収集したプローブデータから、精度良くDRMデータ上の移動経路を特定するマップマッチング装置を提供する。
【解決手段】制御部3は、移動系列単位に分割されたプローブデータを局所的に集約し、集約データを作成する。次に、制御部3は、集約データの移動方向を算出するとともに、集約データを関連付ける候補リンクを検索する。次に、制御部3は、候補リンクの中から集約データの移動方向に最も近い方向を持つ最寄りリンクを決定し、集約データの位置座標から最寄りリンクへ引いた垂線の足を最寄り点とする。そして、制御部3は、最寄り点の集合を用いて、移動経路に含めるリンクを1つずつ確定していき、移動経路を特定する。
【解決手段】制御部3は、移動系列単位に分割されたプローブデータを局所的に集約し、集約データを作成する。次に、制御部3は、集約データの移動方向を算出するとともに、集約データを関連付ける候補リンクを検索する。次に、制御部3は、候補リンクの中から集約データの移動方向に最も近い方向を持つ最寄りリンクを決定し、集約データの位置座標から最寄りリンクへ引いた垂線の足を最寄り点とする。そして、制御部3は、最寄り点の集合を用いて、移動経路に含めるリンクを1つずつ確定していき、移動経路を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング装置、マップマッチング方法及びそのプログラムに関するものである。
【背景技術】
【0002】
現在、車両に搭載した装置を用いて、車両の走行履歴を調査・分析することが行われている。車両搭載装置が収集するデータは、一般に、プローブデータと呼ばれており、位置情報、時刻情報の他に、車両の速度、車両の向き、ハンドルの旋回状況、ブレーキングの状況等様々な情報が含まれていることが多い。そして、車両の走行履歴を調査・分析するため、こうしたプローブデータから、ノードとリンクとで構成されたデジタル道路地図(DRM:Digital Road Map)データ上の移動経路を特定するマップマッチングが行われている。
【0003】
ところで、本発明者らは、特許文献1に示すように、携帯端末を用いて携帯端末保持者の位置情報、時刻情報を効率的に収集できるシステムを発明している。特許文献1に示す携帯端末を用いる方法であれば、自動車を運転しているユーザ以外のプローブデータも収集することができる。
【特許文献1】特開2007−18314号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、携帯端末を用いる方法では、ユーザの向きに関する情報といった位置情報、時刻情報以外の情報が収集できない。また、自動車を運転していないユーザは、目的地に着くまでに様々な場所に立ち寄ることが考えられる。そのため、既存のマップマッチングでは、精度良くDRMデータ上の移動経路を特定することができないといった問題があった。
【0005】
本発明は、前述した問題点に鑑みてなされたもので、その目的は携帯端末によって収集したプローブデータから、精度良くDRMデータ上の移動経路を特定するマップマッチング装置を提供することである。
【課題を解決するための手段】
【0006】
前述した目的を達成するために第1の発明は、位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング装置であって、同一ユーザに係る前記プローブデータ群をデータ取得間隔に基づいて移動系列単位に分割する移動系列分割手段と、同一移動系列に係る前記プローブデータ群を局所的に集約した集約データ群を生成する集約データ生成手段と、前記集約データの移動方向を算出する移動方向算出手段と、前記集約データを関連付ける候補リンクを検索する候補リンク検索手段と、前記候補リンクの中から前記移動方向に最も近い方向を持つ最寄りリンクを決定する最寄りリンク決定手段と、前記集約データの位置座標から前記最寄りリンクへ引いた垂線の足である最寄り点の集合を用いて前記移動経路を特定する移動経路特定手段と、を具備することを特徴とするマップマッチング装置である。
【0007】
ノードとは、交差点その他表現上の結節点である。リンクとは、ノード間の道路区間である。ユーザとは、プローブデータの提供者である。
【0008】
更に、第1の発明は、前記移動経路に含まれる前記リンクごとに、リンク進入時刻、リンク退出時刻、リンク移動時間を含む旅行時間データを算出する旅行時間データ算出手段、を具備することが望ましい。
前記移動経路特定手段は、前記最寄り点の総数と前記最寄りリンクに対するヒット数とを用いても良い。また、前記移動経路特定手段は、前記最寄りリンクごとの前記最寄り点の総数を前記最寄りリンクの長さで除した値を用いても良い。そして、前記移動経路特定手段は、前記移動経路に含める前記リンクを1つずつ確定していくものであることが望ましい。
【0009】
第2の発明は、位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング方法であって、同一ユーザに係る前記プローブデータ群をデータ取得間隔に基づいて移動系列単位に分割するステップと、同一移動系列に係る前記プローブデータ群を局所的に集約した集約データ群を生成するステップと、前記集約データの移動方向を算出するステップと、前記集約データを関連付ける候補リンクを検索するステップと、前記候補リンクの中から前記移動方向に最も近い方向を持つ最寄りリンクを決定するステップと、前記集約データの位置座標から前記最寄りリンクへ引いた垂線の足である最寄り点の集合を用いて前記移動経路を特定するステップと、を含むことを特徴とするマップマッチング方法である。
【0010】
第3の発明は、コンピュータを第1の発明のマップマッチング装置として機能させるプログラムである。
【発明の効果】
【0011】
本発明により、携帯端末によって収集したプローブデータから、精度良くDRMデータ上の移動経路を特定するマップマッチング装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
以下、図面に基づいて、本発明の実施形態を詳細に説明する。
【0013】
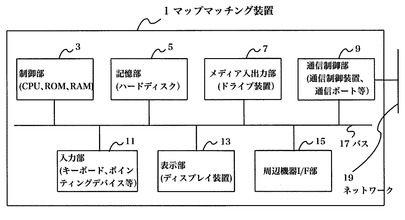
図1は、本実施の形態に係るマップマッチング装置1を実現するコンピュータのハードウェア構成図である。尚、図1のハードウェア構成は一例であり、用途、目的に応じて様々な構成を採ることが可能である。
マップマッチング装置1は、制御部3、記憶部5、メディア入出力部7、通信制御部9、入力部11、表示部13、周辺機器I/F部15等が、バス17を介して接続される。
【0014】
制御部3は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。
【0015】
CPUは、記憶部5、ROM、記録媒体等に格納されるプログラムをRAM上のワークメモリ領域に呼び出して実行し、バス17を介して接続された各装置を駆動制御し、マップマッチング装置1が行う後述する処理を実現する。
ROMは、不揮発性メモリであり、コンピュータのブートプログラムやBIOS等のプログラム、データ等を恒久的に保持している。
RAMは、揮発性メモリであり、記憶部5、ROM、記録媒体等からロードしたプログラム、データ等を一時的に保持するとともに、制御部3が各種処理を行う為に使用するワークエリアを備える。
【0016】
記憶部5は、HDD(ハードディスクドライブ)であり、制御部3が実行するプログラム、プログラム実行に必要なデータ、OS(オペレーティングシステム)等が格納される。プログラムに関しては、OS(オペレーティングシステム)に相当する制御プログラムや、後述の処理に相当するアプリケーションプログラムが格納されている。
これらの各プログラムコードは、制御部3により必要に応じて読み出されてRAMに移され、CPUに読み出されて各種の手段として実行される。
【0017】
メディア入出力部7(ドライブ装置)は、データの入出力を行い、例えば、フロッピー(登録商標)ディスクドライブ、CDドライブ(−ROM、−R、−RW等)、DVDドライブ(−ROM、−R、−RW等)、MOドライブ等のメディア入出力装置を有する。
【0018】
通信制御部9は、通信制御装置、通信ポート等を有し、コンピュータとネットワーク19間の通信を媒介する通信インタフェースであり、ネットワーク19を介して、他のコンピュータ間との通信制御を行う。
【0019】
入力部11は、データの入力を行い、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置を有する。
入力部11を介して、コンピュータに対して、操作指示、動作指示、データ入力等を行うことができる。
【0020】
表示部13は、CRTモニタ、液晶パネル等のディスプレイ装置、ディスプレイ装置と連携してコンピュータのビデオ機能を実現するための論理回路等(ビデオアダプタ等)を有する。
【0021】
周辺機器I/F(インタフェース)部15は、コンピュータに周辺機器を接続させるためのポートであり、周辺機器I/F部15を介してコンピュータは周辺機器とのデータの送受信を行う。周辺機器I/F部15は、USBやIEEE1394やRS−232C等で構成されており、通常複数の周辺機器I/Fを有する。周辺機器との接続形態は有線、無線を問わない。
【0022】
バス17は、各装置間の制御信号、データ信号等の授受を媒介する経路である。
【0023】
次に、図2を参照しながら、マップマッチング装置1の機能を実現する構成について説明する。
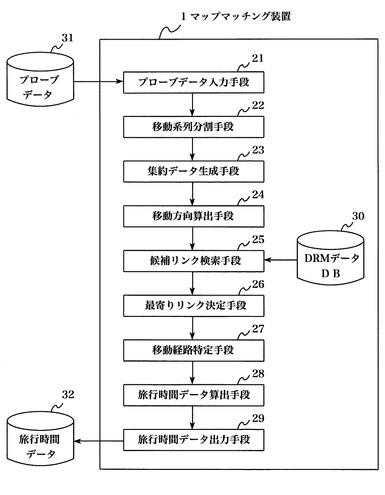
図2は、マップマッチング装置1の機能の概要を示すブロック図である。
【0024】
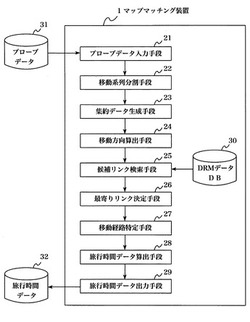
マップマッチング装置1は、プローブデータ入力手段21、移動系列分割手段22、集約データ生成手段23、移動方向算出手段24、候補リンク検索手段25、最寄りリンク決定手段26、移動経路特定手段27、旅行時間データ算出手段28、旅行時間データ出力手段29、DRMデータDB30等を備える。
【0025】
プローブデータ入力手段21は、位置情報、時刻情報を含むプローブデータ31を入力する。1回の処理で扱うデータ量は、例えば、1ユーザの1日分のプローブデータ31である。ユーザとは、プローブデータ31の提供者である。データの入力は、入力部11を介しても良いし、メディア入出力部7を介しても良い。また、ネットワーク19を介して、他のコンピュータからデータを受信しても良い。
【0026】
移動系列分割手段22は、同一ユーザに係るプローブデータ群をデータ取得間隔に基づいて移動系列単位に分割する。例えば、車両に乗車しているユーザであれば、途中で停車して休憩等を取った場合、別の移動系列として扱う。具体的には、データの取得間隔が所定の時間以上離れている場合、または、所定の時間を経過しても所定の半径内から出ていない場合等について、別の移動系列として扱う。
【0027】
集約データ生成手段23は、同一移動系列に係るプローブデータ群を局所的に集約した集約データ群を生成する。GPS機能によって取得した位置情報は測位誤差が含まれており、同一の位置に所在している場合でも、プローブデータとしては微小な動きが生ずる。そこで、こうしたプローブデータを局所的に集約し、後続する処理の効率化と高速化を図る。
【0028】
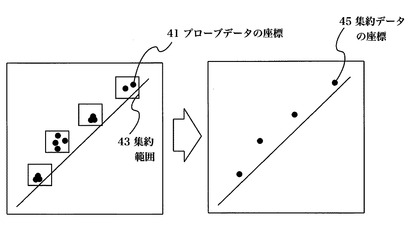
図3は、プローブデータを集約データに集約する1例を示す図である。
図3の左図に示すように、集約データ生成手段23は、プローブデータの座標41を集約範囲43ごとに集約する。集約方法は、プローブデータの座標41を時系列で順番にチェックしていき、所定の距離以内に含まれるものを集約する。
また、集約データ生成手段23は、集約データの位置情報、時刻情報を決定する。集約データの位置情報、時刻情報は、例えば、同一の集約範囲43に含まれるプローブデータの位置情報、時刻情報の平均値としても良いし、同一の集約範囲43の中で時系列的に先頭となるプローブデータの位置情報、時刻情報としても良い。そして、図3の右図に示すように、集約範囲43ごとに1つの集約データの座標45が定まる。
【0029】
移動方向算出手段24は、集約データの移動方向を算出する。移動方向は、後述する最寄りリンク決定の処理において重要な判定要素となる。
【0030】
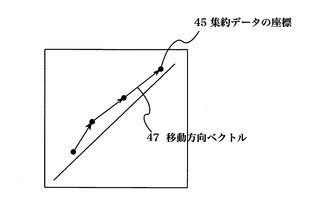
図4は、集約データの移動方向を算出する1例を示す図である。
図4に示すように、移動方向算出手段24は、ある集約データの座標45から、時系列的に次の集約データの座標45への向きを持つ移動方向ベクトル47を算出する。
【0031】
候補リンク検索手段25は、DRMデータDB30を参照し、集約データを関連付ける候補リンクを検索する。DRMデータDB30は、ノードとリンクとで構成されたDRMデータを保持する。ノードデータとしては、ノード番号、位置座標、ノード種別、接続リンク本数、接続ノード番号、交差点名称等が含まれる。また、リンクデータとしては、リンク番号(起終点ノードの番号)、道路種別、路線番号、リンク長、各種交通規制情報等が含まれる。尚、DRMデータは、一般に市販されているものである。
【0032】
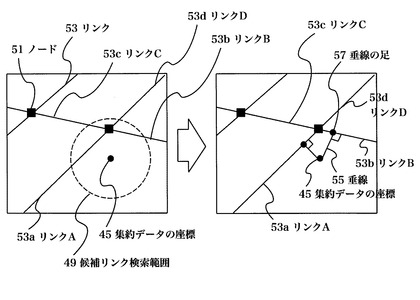
図5は、候補リンクを検索する1例を示す図である。
図5に示すように、ノード51は、交差点その他表現上の結節点である。リンク53は、ノード51間の道路区間である。
候補リンク検索手段25は、集約データの座標45から所定の範囲内に存在するリンク53を抽出する。図5の左図に示す例では、53aのリンクA、53bのリンクB、53cのリンクC、53dのリンクDが抽出される。次に、図5の右図に示すように、候補リンク検索手段25は、集約データの座標45から抽出したリンク53に垂線55を下ろす。垂線55が下ろせないリンク53は、候補リンクの対象から外す。図5の右図に示す例では、53aのリンクA、53bのリンクBに垂線55を下ろすことができることから、53aのリンクA、53bのリンクBは候補リンクの対象となる。一方、53cのリンクC、53dのリンクDに垂線55を下ろすことができないことから、53cのリンクC、53dのリンクDは候補リンクの対象外となる。尚、垂線の足57のいずれかは、後述する最寄り点となる。
【0033】
最寄りリンク決定手段26は、候補リンクの中から集約データの移動方向に最も近い方向を持つ最寄りリンクを決定する。すなわち、移動方向算出手段24で算出した集約データの移動方向を示す角度とDRMデータより算出した候補リンクの方向を示す角度とを比較することで、最寄りリンクを決定する。最寄りリンクは、後述する移動経路の決定に重要な判定要素となる。
【0034】
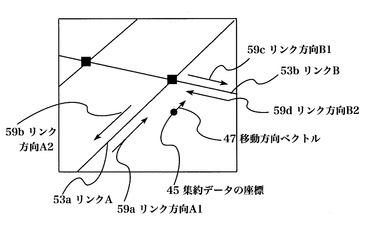
図6は、最寄りリンクを決定する1例を示す図である。
図6に示す例では、53aのリンクA、53bのリンクBが候補リンクである。そして、これらの候補リンクに対し、59aのリンク方向A1、59bのリンク方向A2、59cのリンク方向B1、59dのリンク方向B2の4つのリンク方向が存在する。最寄りリンク決定手段26は、これらのリンク方向を示す角度を算出し、移動方向ベクトル47の方向を示す角度と最も近いリンク方向を持つものを最寄りリンクと決定する。図6に示す例では、59aのリンク方向A1が最も近いリンク方向と判定されて、53aのリンクAが最寄りリンクに決定される。
【0035】
移動経路特定手段27は、集約データの位置座標から最寄りリンクへ引いた垂線の足57である最寄り点の集合を用いて移動経路を特定する。最寄り点は、候補リンク検索手段25によって算出された垂線の足57のうち、最寄りリンクに対する垂線の足57である。
【0036】
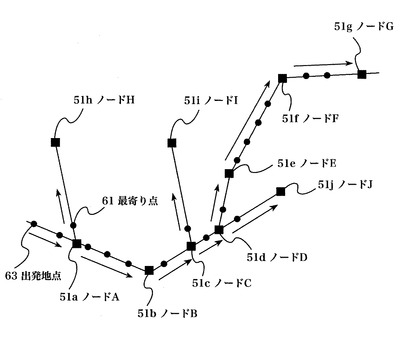
図7は、最寄り点61の集合の1例を示す図である。
以下、例えば、ノードAとノードBとの間のリンクをリンクABと呼ぶこととする。図7の例では、出発地点63から51aのノードAまでは、最寄り点61が二つ存在する。また、51aのノードAは分岐点となっており、リンクAB上には最寄り点61が三つ存在し、リンクAH上には最寄り点61が一つ存在する。従って、いずれのリンクを移動経路に含めるか決定する必要があるため、最寄りリンクを決定しただけでは移動経路を特定することができない。本発明の実施の形態では、移動経路を特定するロジックを二通り採用し、いずれのロジックで処理を行うかを処理開始前に選択することができる。
【0037】
まず、移動経路を特定するロジックとして、最寄り点の総数と最寄りリンクに対するヒット数とを用いるロジックについて説明する。例として、図7の例において、出発地点63から51aのノードAまでの移動経路は確定した状態で、次のノードまでの移動経路を決定する手順を説明する。
【0038】
図8は、図7の例における最寄り点の総数と最寄りリンクの総数を示す図である。
移動経路特定手段27は、51aのノードAを基準ノードとし、ノードAから時系列順に所定の数の最寄り点61を読み込み、読み込み経路ごとに最寄り点61の総数を計算する。また、ノードAから所定の数のリンクを読み込み、読み込み経路ごとに最寄りリンクに対するヒット数を算出する。ここで、最寄りリンクに対するヒット数とは、各最寄りリンク上に最寄り点61が1つでも存在するときに最寄りリンクに対するヒットと定義し、読み込み経路におけるヒットの数をカウントしたものである。図8に示す例では、ノードAから読み込むリンク数を6リンク先までとしている。
次に、移動経路特定手段27は、ノードAから、例えば、6リンク先までの最寄り点61の総数が最も多い読み込み経路を移動経路の候補として決定する。更に、ノードAから6リンク先までの最寄り点61の総数が同一の読み込み経路が存在する場合、ノードAから6リンク先までの読み込み経路の中のリンクに対するヒット数が多い方を、候補として決定する。
【0039】
図8に示すように、ノードAからの最寄り点61の総数が最も多い読み込み経路は、A−>B−>C−>D−>E−>F−>Gであり、この読み込み経路が移動経路の候補と決定される。そして、移動経路特定手段27は、リンクABを移動経路に含めることを確定する。ここで、移動経路を読み込んだ全てのリンクまで確定してしまうと、行き止まり等が存在する場合は、移動経路の到着地点(=時系列的に最後の最寄り点61)に到達できなくなる可能性があり、不正確な移動経路を特定してしまう場合がある。
リンクABを移動経路に含めることを確定すると、次はノードBを基準ノードとして同様の手順を行い、最終的に全ての移動経路を確定していく。このように、移動経路に含めるリンクを1つずつ確定していくことで、正確な移動経路を特定することができる。
【0040】
次に、移動経路を特定するロジックとして、最寄りリンクごとの最寄り点の総数を最寄りリンクの長さで除した値を用いるロジックについて説明する。例として、図7の例において、出発地点63から51aのノードAまでの移動経路は確定した状態で、次のノードまでの移動経路を決定する手順を説明する。
【0041】
図9は、図7の例における最寄りリンクの長さを示す図である。
図9に示す最寄りリンクの長さは、DRMデータに含まれるデータである。
【0042】
図10は、図7の例における最寄り点の総数をリンクの長さで除した値の合計値を示す図である。
図10に示す値は、図7に示す最寄りリングごとの最寄り点の総数と図9に示す最寄りリンクの長さとを用いて算出した値である。
移動経路特定手段27は、51aのノードAを基準ノードとし、ノードAから時系列順に所定の数の最寄り点61を読み込み、最寄りリンクごとに最寄り点61の総数を計算する。また、ノードAから所定の数のリンクを読み込み、読み込み経路ごとに最寄り点61の総数を最寄りリンクの長さで除した値の合計値を算出する。図10に示す例では、ノードAから読み込むリンク数を6リンク先までとしている。
次に、移動経路特定手段27は、最寄りリンクごとの最寄り点61の総数を最寄りリンクの長さで除した値の合計値が最も大きい読み込み経路を移動経路の候補として決定する。
【0043】
図10に示すように、最寄りリンクごとの最寄り点61の総数を最寄りリンクの長さで除した値の合計値が最も大きい読み込み経路は、A−>B−>C−>D−>E−>F−>Gであり、この読み込み経路が移動経路の候補と決定される。そして、移動経路特定手段27は、リンクABを移動経路に含めることを確定する。
リンクABを移動経路に含めることを確定すると、次はノードBを基準ノードとして同様の手順を行い、最終的に全ての移動経路を確定していく。このように、移動経路に含めるリンクを1つずつ確定していくことで、正確な移動経路を特定することができる。
【0044】
最後に、移動経路特定手段27は、確定した移動経路の検証を行う。これは、確定した移動経路に含まれる最寄りリンクの中に最寄り点61が存在しないものもあるため、前後の最寄り点61が存在する最寄りリンクを用いて検証を行い、必要があれば移動経路の補正をする。
【0045】
旅行時間データ算出手段28は、移動経路に含まれるリンクごとに、リンク進入時刻、リンク退出時刻、リンク移動時間を含む旅行時間データを算出する。リンク進入時刻、リンク退出時刻は、最寄り点61の時刻情報を用いて、必要があれば補間計算を行うことにより算出する。リンク移動時間は、リンク進入時刻とリンク退出時刻とから算出する。更に、DRMデータに含まれるリンク長を用いて、リンク内平均移動速度も算出することができる。
【0046】
旅行時間データ出力手段29は、旅行時間データ32を出力する。データの出力は、利用し易いフォーマットで記憶部5が保持するデータベースに書き込むようにしても良い。また、ネットワーク19を介して、他のコンピュータに送信しても良い。
【0047】
次に、図11を参照しながら、マップマッチング装置1の動作の詳細について説明する。
図11は、本実施の形態におけるマップマッチング装置1において実行されるマップマッチング処理の流れを説明するフローチャートである。
【0048】
図11に示すように、制御部3は、プローブデータ入力手段21によってプローブデータが入力されると(S101)、移動系列分割手段22によって移動系列を分割する(S102)。
【0049】
次に、制御部3は、処理を行う移動系列を選択する(S103)。移動系列は、例えば、移動系列に含まれるプローブデータの時系列順に選択する。
次に、制御部3は、集約データ生成手段23によって集約データを生成する(S104)。
【0050】
次に、制御部3は、処理を行う集約データを選択する(S105)。集約データは、例えば、集約データが保持する時刻情報の時系列順に選択する。
次に、制御部3は、移動方向算出手段24によって集約データの移動方向を算出する(S106)。そして、候補リンク検索手段25によって候補リンクの検索を行い(S107)、最寄りリンク決定手段26によって候補リンクの中から最寄りリンクを決定する(S108)。
次に、制御部3は、全ての集約データについて処理が終了したか確認する(S109)。
処理が終了していない場合、S105から繰り返す。
処理が終了している場合、S110に進む。
【0051】
次に、制御部3は、移動経路特定手段27によってS110からS113の処理を行う。
制御部3は、処理を行う基準ノードを選択する(S110)。基準ノードは、1回目の処理であれば出発地点であり、2回目以降の処理であれば前回のS112で確定されたリンクに係るノード(例えば、リンクABが前回のS112で確定されたリンクであれば、ノードB)となる。
次に、制御部3は、移動経路の候補を決定し(S111)、移動経路に含めるリンクを確定する(S112)。
次に、制御部3は、移動経路が全て確定したか確認する(S113)。
全て確定していない場合、S110から繰り返す。
全て確定している場合、S114に進む。
【0052】
次に、制御部3は、処理を行うリンクを選択する(S114)。リンクは、例えば、移動経路の出発地点を含むリンクから時系列順に選択する。
次に、制御部3は、旅行時間データ算出手段28によって旅行時間データを算出する(S115)。
次に、制御部3は、移動経路に含まれる全てのリンクについて処理が終了したか確認する(S116)。
処理が終了していない場合、S114から繰り返す。
処理が終了している場合、S117に進む。
【0053】
次に、制御部3は、全ての移動系列について処理が終了したか確認する(S117)。
処理が終了していない場合、S103から繰り返す。
処理が終了している場合、S118に進む。
【0054】
最後に、制御部3は、旅行時間データ出力手段29によって旅行時間データを出力し(S118)、処理を終了する。
【0055】
以上説明したように、本発明の実施の形態によれば、制御部3は、移動系列単位に分割されたプローブデータを局所的に集約し、集約データを作成する。次に、制御部3は、集約データの移動方向を算出するとともに、集約データを関連付ける候補リンクを検索する。次に、制御部3は、候補リンクの中から集約データの移動方向に最も近い方向を持つ最寄りリンクを決定し、集約データの位置座標から最寄りリンクへ引いた垂線の足を最寄り点とする。そして、制御部3は、最寄り点の集合を用いて、移動経路に含めるリンクを1つずつ確定していき、移動経路を特定する。ここで、移動経路を特定するロジックは、最寄り点の総数と最寄りリンクに対するヒット数とを用いるものでも良いし、最寄りリンクごとの最寄り点の総数を最寄りリンクの長さで除した値を用いるものでも良い。
【0056】
本発明の実施の形態によって、携帯端末によって収集したプローブデータから、精度良くデジタル道路地図データ上の移動経路を特定するマップマッチング装置を提供することができる。特に、プローブデータを局所的に集約することで、処理の効率化と高速化を図ることができる。また、移動経路に含めるリンクを1つずつ確定していくことで、正確な移動経路を特定することができる。
【0057】
以上、添付図面を参照しながら、本発明に係るマップマッチング装置等の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【図面の簡単な説明】
【0058】
【図1】マップマッチング装置1を実現するコンピュータのハードウェア構成図
【図2】マップマッチング装置1の機能の概要を示すブロック図
【図3】プローブデータを集約データに集約する1例を示す図
【図4】集約データの移動方向を算出する1例を示す図
【図5】候補リンクを検索する1例を示す図
【図6】最寄りリンクを決定する1例を示す図
【図7】最寄り点61の集合の1例を示す図
【図8】図7の例における最寄り点の総数と最寄りリンクの総数を示す図
【図9】図7の例における最寄りリンクの長さを示す図
【図10】図7の例における最寄り点の総数をリンクの長さで除した値の合計値を示す図
【図11】マップマッチング処理の流れを説明するフローチャート
【符号の説明】
【0059】
1………マップマッチング装置
3………制御部
5………記憶部
7………メディア入出力部
9………通信制御部
11………入力部
13………表示部
15………周辺機器I/F部
17………バス
19………ネットワーク
【技術分野】
【0001】
本発明は、位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング装置、マップマッチング方法及びそのプログラムに関するものである。
【背景技術】
【0002】
現在、車両に搭載した装置を用いて、車両の走行履歴を調査・分析することが行われている。車両搭載装置が収集するデータは、一般に、プローブデータと呼ばれており、位置情報、時刻情報の他に、車両の速度、車両の向き、ハンドルの旋回状況、ブレーキングの状況等様々な情報が含まれていることが多い。そして、車両の走行履歴を調査・分析するため、こうしたプローブデータから、ノードとリンクとで構成されたデジタル道路地図(DRM:Digital Road Map)データ上の移動経路を特定するマップマッチングが行われている。
【0003】
ところで、本発明者らは、特許文献1に示すように、携帯端末を用いて携帯端末保持者の位置情報、時刻情報を効率的に収集できるシステムを発明している。特許文献1に示す携帯端末を用いる方法であれば、自動車を運転しているユーザ以外のプローブデータも収集することができる。
【特許文献1】特開2007−18314号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、携帯端末を用いる方法では、ユーザの向きに関する情報といった位置情報、時刻情報以外の情報が収集できない。また、自動車を運転していないユーザは、目的地に着くまでに様々な場所に立ち寄ることが考えられる。そのため、既存のマップマッチングでは、精度良くDRMデータ上の移動経路を特定することができないといった問題があった。
【0005】
本発明は、前述した問題点に鑑みてなされたもので、その目的は携帯端末によって収集したプローブデータから、精度良くDRMデータ上の移動経路を特定するマップマッチング装置を提供することである。
【課題を解決するための手段】
【0006】
前述した目的を達成するために第1の発明は、位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング装置であって、同一ユーザに係る前記プローブデータ群をデータ取得間隔に基づいて移動系列単位に分割する移動系列分割手段と、同一移動系列に係る前記プローブデータ群を局所的に集約した集約データ群を生成する集約データ生成手段と、前記集約データの移動方向を算出する移動方向算出手段と、前記集約データを関連付ける候補リンクを検索する候補リンク検索手段と、前記候補リンクの中から前記移動方向に最も近い方向を持つ最寄りリンクを決定する最寄りリンク決定手段と、前記集約データの位置座標から前記最寄りリンクへ引いた垂線の足である最寄り点の集合を用いて前記移動経路を特定する移動経路特定手段と、を具備することを特徴とするマップマッチング装置である。
【0007】
ノードとは、交差点その他表現上の結節点である。リンクとは、ノード間の道路区間である。ユーザとは、プローブデータの提供者である。
【0008】
更に、第1の発明は、前記移動経路に含まれる前記リンクごとに、リンク進入時刻、リンク退出時刻、リンク移動時間を含む旅行時間データを算出する旅行時間データ算出手段、を具備することが望ましい。
前記移動経路特定手段は、前記最寄り点の総数と前記最寄りリンクに対するヒット数とを用いても良い。また、前記移動経路特定手段は、前記最寄りリンクごとの前記最寄り点の総数を前記最寄りリンクの長さで除した値を用いても良い。そして、前記移動経路特定手段は、前記移動経路に含める前記リンクを1つずつ確定していくものであることが望ましい。
【0009】
第2の発明は、位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング方法であって、同一ユーザに係る前記プローブデータ群をデータ取得間隔に基づいて移動系列単位に分割するステップと、同一移動系列に係る前記プローブデータ群を局所的に集約した集約データ群を生成するステップと、前記集約データの移動方向を算出するステップと、前記集約データを関連付ける候補リンクを検索するステップと、前記候補リンクの中から前記移動方向に最も近い方向を持つ最寄りリンクを決定するステップと、前記集約データの位置座標から前記最寄りリンクへ引いた垂線の足である最寄り点の集合を用いて前記移動経路を特定するステップと、を含むことを特徴とするマップマッチング方法である。
【0010】
第3の発明は、コンピュータを第1の発明のマップマッチング装置として機能させるプログラムである。
【発明の効果】
【0011】
本発明により、携帯端末によって収集したプローブデータから、精度良くDRMデータ上の移動経路を特定するマップマッチング装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
以下、図面に基づいて、本発明の実施形態を詳細に説明する。
【0013】
図1は、本実施の形態に係るマップマッチング装置1を実現するコンピュータのハードウェア構成図である。尚、図1のハードウェア構成は一例であり、用途、目的に応じて様々な構成を採ることが可能である。
マップマッチング装置1は、制御部3、記憶部5、メディア入出力部7、通信制御部9、入力部11、表示部13、周辺機器I/F部15等が、バス17を介して接続される。
【0014】
制御部3は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。
【0015】
CPUは、記憶部5、ROM、記録媒体等に格納されるプログラムをRAM上のワークメモリ領域に呼び出して実行し、バス17を介して接続された各装置を駆動制御し、マップマッチング装置1が行う後述する処理を実現する。
ROMは、不揮発性メモリであり、コンピュータのブートプログラムやBIOS等のプログラム、データ等を恒久的に保持している。
RAMは、揮発性メモリであり、記憶部5、ROM、記録媒体等からロードしたプログラム、データ等を一時的に保持するとともに、制御部3が各種処理を行う為に使用するワークエリアを備える。
【0016】
記憶部5は、HDD(ハードディスクドライブ)であり、制御部3が実行するプログラム、プログラム実行に必要なデータ、OS(オペレーティングシステム)等が格納される。プログラムに関しては、OS(オペレーティングシステム)に相当する制御プログラムや、後述の処理に相当するアプリケーションプログラムが格納されている。
これらの各プログラムコードは、制御部3により必要に応じて読み出されてRAMに移され、CPUに読み出されて各種の手段として実行される。
【0017】
メディア入出力部7(ドライブ装置)は、データの入出力を行い、例えば、フロッピー(登録商標)ディスクドライブ、CDドライブ(−ROM、−R、−RW等)、DVDドライブ(−ROM、−R、−RW等)、MOドライブ等のメディア入出力装置を有する。
【0018】
通信制御部9は、通信制御装置、通信ポート等を有し、コンピュータとネットワーク19間の通信を媒介する通信インタフェースであり、ネットワーク19を介して、他のコンピュータ間との通信制御を行う。
【0019】
入力部11は、データの入力を行い、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置を有する。
入力部11を介して、コンピュータに対して、操作指示、動作指示、データ入力等を行うことができる。
【0020】
表示部13は、CRTモニタ、液晶パネル等のディスプレイ装置、ディスプレイ装置と連携してコンピュータのビデオ機能を実現するための論理回路等(ビデオアダプタ等)を有する。
【0021】
周辺機器I/F(インタフェース)部15は、コンピュータに周辺機器を接続させるためのポートであり、周辺機器I/F部15を介してコンピュータは周辺機器とのデータの送受信を行う。周辺機器I/F部15は、USBやIEEE1394やRS−232C等で構成されており、通常複数の周辺機器I/Fを有する。周辺機器との接続形態は有線、無線を問わない。
【0022】
バス17は、各装置間の制御信号、データ信号等の授受を媒介する経路である。
【0023】
次に、図2を参照しながら、マップマッチング装置1の機能を実現する構成について説明する。
図2は、マップマッチング装置1の機能の概要を示すブロック図である。
【0024】
マップマッチング装置1は、プローブデータ入力手段21、移動系列分割手段22、集約データ生成手段23、移動方向算出手段24、候補リンク検索手段25、最寄りリンク決定手段26、移動経路特定手段27、旅行時間データ算出手段28、旅行時間データ出力手段29、DRMデータDB30等を備える。
【0025】
プローブデータ入力手段21は、位置情報、時刻情報を含むプローブデータ31を入力する。1回の処理で扱うデータ量は、例えば、1ユーザの1日分のプローブデータ31である。ユーザとは、プローブデータ31の提供者である。データの入力は、入力部11を介しても良いし、メディア入出力部7を介しても良い。また、ネットワーク19を介して、他のコンピュータからデータを受信しても良い。
【0026】
移動系列分割手段22は、同一ユーザに係るプローブデータ群をデータ取得間隔に基づいて移動系列単位に分割する。例えば、車両に乗車しているユーザであれば、途中で停車して休憩等を取った場合、別の移動系列として扱う。具体的には、データの取得間隔が所定の時間以上離れている場合、または、所定の時間を経過しても所定の半径内から出ていない場合等について、別の移動系列として扱う。
【0027】
集約データ生成手段23は、同一移動系列に係るプローブデータ群を局所的に集約した集約データ群を生成する。GPS機能によって取得した位置情報は測位誤差が含まれており、同一の位置に所在している場合でも、プローブデータとしては微小な動きが生ずる。そこで、こうしたプローブデータを局所的に集約し、後続する処理の効率化と高速化を図る。
【0028】
図3は、プローブデータを集約データに集約する1例を示す図である。
図3の左図に示すように、集約データ生成手段23は、プローブデータの座標41を集約範囲43ごとに集約する。集約方法は、プローブデータの座標41を時系列で順番にチェックしていき、所定の距離以内に含まれるものを集約する。
また、集約データ生成手段23は、集約データの位置情報、時刻情報を決定する。集約データの位置情報、時刻情報は、例えば、同一の集約範囲43に含まれるプローブデータの位置情報、時刻情報の平均値としても良いし、同一の集約範囲43の中で時系列的に先頭となるプローブデータの位置情報、時刻情報としても良い。そして、図3の右図に示すように、集約範囲43ごとに1つの集約データの座標45が定まる。
【0029】
移動方向算出手段24は、集約データの移動方向を算出する。移動方向は、後述する最寄りリンク決定の処理において重要な判定要素となる。
【0030】
図4は、集約データの移動方向を算出する1例を示す図である。
図4に示すように、移動方向算出手段24は、ある集約データの座標45から、時系列的に次の集約データの座標45への向きを持つ移動方向ベクトル47を算出する。
【0031】
候補リンク検索手段25は、DRMデータDB30を参照し、集約データを関連付ける候補リンクを検索する。DRMデータDB30は、ノードとリンクとで構成されたDRMデータを保持する。ノードデータとしては、ノード番号、位置座標、ノード種別、接続リンク本数、接続ノード番号、交差点名称等が含まれる。また、リンクデータとしては、リンク番号(起終点ノードの番号)、道路種別、路線番号、リンク長、各種交通規制情報等が含まれる。尚、DRMデータは、一般に市販されているものである。
【0032】
図5は、候補リンクを検索する1例を示す図である。
図5に示すように、ノード51は、交差点その他表現上の結節点である。リンク53は、ノード51間の道路区間である。
候補リンク検索手段25は、集約データの座標45から所定の範囲内に存在するリンク53を抽出する。図5の左図に示す例では、53aのリンクA、53bのリンクB、53cのリンクC、53dのリンクDが抽出される。次に、図5の右図に示すように、候補リンク検索手段25は、集約データの座標45から抽出したリンク53に垂線55を下ろす。垂線55が下ろせないリンク53は、候補リンクの対象から外す。図5の右図に示す例では、53aのリンクA、53bのリンクBに垂線55を下ろすことができることから、53aのリンクA、53bのリンクBは候補リンクの対象となる。一方、53cのリンクC、53dのリンクDに垂線55を下ろすことができないことから、53cのリンクC、53dのリンクDは候補リンクの対象外となる。尚、垂線の足57のいずれかは、後述する最寄り点となる。
【0033】
最寄りリンク決定手段26は、候補リンクの中から集約データの移動方向に最も近い方向を持つ最寄りリンクを決定する。すなわち、移動方向算出手段24で算出した集約データの移動方向を示す角度とDRMデータより算出した候補リンクの方向を示す角度とを比較することで、最寄りリンクを決定する。最寄りリンクは、後述する移動経路の決定に重要な判定要素となる。
【0034】
図6は、最寄りリンクを決定する1例を示す図である。
図6に示す例では、53aのリンクA、53bのリンクBが候補リンクである。そして、これらの候補リンクに対し、59aのリンク方向A1、59bのリンク方向A2、59cのリンク方向B1、59dのリンク方向B2の4つのリンク方向が存在する。最寄りリンク決定手段26は、これらのリンク方向を示す角度を算出し、移動方向ベクトル47の方向を示す角度と最も近いリンク方向を持つものを最寄りリンクと決定する。図6に示す例では、59aのリンク方向A1が最も近いリンク方向と判定されて、53aのリンクAが最寄りリンクに決定される。
【0035】
移動経路特定手段27は、集約データの位置座標から最寄りリンクへ引いた垂線の足57である最寄り点の集合を用いて移動経路を特定する。最寄り点は、候補リンク検索手段25によって算出された垂線の足57のうち、最寄りリンクに対する垂線の足57である。
【0036】
図7は、最寄り点61の集合の1例を示す図である。
以下、例えば、ノードAとノードBとの間のリンクをリンクABと呼ぶこととする。図7の例では、出発地点63から51aのノードAまでは、最寄り点61が二つ存在する。また、51aのノードAは分岐点となっており、リンクAB上には最寄り点61が三つ存在し、リンクAH上には最寄り点61が一つ存在する。従って、いずれのリンクを移動経路に含めるか決定する必要があるため、最寄りリンクを決定しただけでは移動経路を特定することができない。本発明の実施の形態では、移動経路を特定するロジックを二通り採用し、いずれのロジックで処理を行うかを処理開始前に選択することができる。
【0037】
まず、移動経路を特定するロジックとして、最寄り点の総数と最寄りリンクに対するヒット数とを用いるロジックについて説明する。例として、図7の例において、出発地点63から51aのノードAまでの移動経路は確定した状態で、次のノードまでの移動経路を決定する手順を説明する。
【0038】
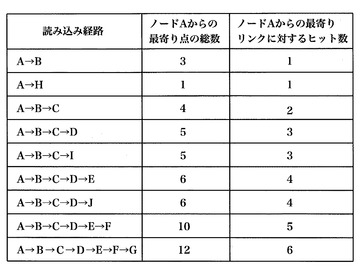
図8は、図7の例における最寄り点の総数と最寄りリンクの総数を示す図である。
移動経路特定手段27は、51aのノードAを基準ノードとし、ノードAから時系列順に所定の数の最寄り点61を読み込み、読み込み経路ごとに最寄り点61の総数を計算する。また、ノードAから所定の数のリンクを読み込み、読み込み経路ごとに最寄りリンクに対するヒット数を算出する。ここで、最寄りリンクに対するヒット数とは、各最寄りリンク上に最寄り点61が1つでも存在するときに最寄りリンクに対するヒットと定義し、読み込み経路におけるヒットの数をカウントしたものである。図8に示す例では、ノードAから読み込むリンク数を6リンク先までとしている。
次に、移動経路特定手段27は、ノードAから、例えば、6リンク先までの最寄り点61の総数が最も多い読み込み経路を移動経路の候補として決定する。更に、ノードAから6リンク先までの最寄り点61の総数が同一の読み込み経路が存在する場合、ノードAから6リンク先までの読み込み経路の中のリンクに対するヒット数が多い方を、候補として決定する。
【0039】
図8に示すように、ノードAからの最寄り点61の総数が最も多い読み込み経路は、A−>B−>C−>D−>E−>F−>Gであり、この読み込み経路が移動経路の候補と決定される。そして、移動経路特定手段27は、リンクABを移動経路に含めることを確定する。ここで、移動経路を読み込んだ全てのリンクまで確定してしまうと、行き止まり等が存在する場合は、移動経路の到着地点(=時系列的に最後の最寄り点61)に到達できなくなる可能性があり、不正確な移動経路を特定してしまう場合がある。
リンクABを移動経路に含めることを確定すると、次はノードBを基準ノードとして同様の手順を行い、最終的に全ての移動経路を確定していく。このように、移動経路に含めるリンクを1つずつ確定していくことで、正確な移動経路を特定することができる。
【0040】
次に、移動経路を特定するロジックとして、最寄りリンクごとの最寄り点の総数を最寄りリンクの長さで除した値を用いるロジックについて説明する。例として、図7の例において、出発地点63から51aのノードAまでの移動経路は確定した状態で、次のノードまでの移動経路を決定する手順を説明する。
【0041】
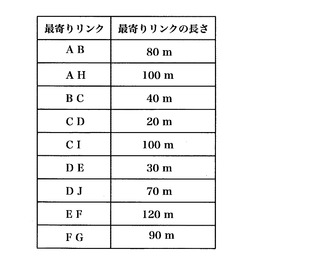
図9は、図7の例における最寄りリンクの長さを示す図である。
図9に示す最寄りリンクの長さは、DRMデータに含まれるデータである。
【0042】
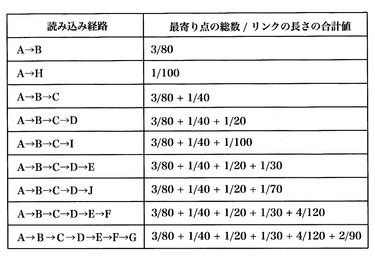
図10は、図7の例における最寄り点の総数をリンクの長さで除した値の合計値を示す図である。
図10に示す値は、図7に示す最寄りリングごとの最寄り点の総数と図9に示す最寄りリンクの長さとを用いて算出した値である。
移動経路特定手段27は、51aのノードAを基準ノードとし、ノードAから時系列順に所定の数の最寄り点61を読み込み、最寄りリンクごとに最寄り点61の総数を計算する。また、ノードAから所定の数のリンクを読み込み、読み込み経路ごとに最寄り点61の総数を最寄りリンクの長さで除した値の合計値を算出する。図10に示す例では、ノードAから読み込むリンク数を6リンク先までとしている。
次に、移動経路特定手段27は、最寄りリンクごとの最寄り点61の総数を最寄りリンクの長さで除した値の合計値が最も大きい読み込み経路を移動経路の候補として決定する。
【0043】
図10に示すように、最寄りリンクごとの最寄り点61の総数を最寄りリンクの長さで除した値の合計値が最も大きい読み込み経路は、A−>B−>C−>D−>E−>F−>Gであり、この読み込み経路が移動経路の候補と決定される。そして、移動経路特定手段27は、リンクABを移動経路に含めることを確定する。
リンクABを移動経路に含めることを確定すると、次はノードBを基準ノードとして同様の手順を行い、最終的に全ての移動経路を確定していく。このように、移動経路に含めるリンクを1つずつ確定していくことで、正確な移動経路を特定することができる。
【0044】
最後に、移動経路特定手段27は、確定した移動経路の検証を行う。これは、確定した移動経路に含まれる最寄りリンクの中に最寄り点61が存在しないものもあるため、前後の最寄り点61が存在する最寄りリンクを用いて検証を行い、必要があれば移動経路の補正をする。
【0045】
旅行時間データ算出手段28は、移動経路に含まれるリンクごとに、リンク進入時刻、リンク退出時刻、リンク移動時間を含む旅行時間データを算出する。リンク進入時刻、リンク退出時刻は、最寄り点61の時刻情報を用いて、必要があれば補間計算を行うことにより算出する。リンク移動時間は、リンク進入時刻とリンク退出時刻とから算出する。更に、DRMデータに含まれるリンク長を用いて、リンク内平均移動速度も算出することができる。
【0046】
旅行時間データ出力手段29は、旅行時間データ32を出力する。データの出力は、利用し易いフォーマットで記憶部5が保持するデータベースに書き込むようにしても良い。また、ネットワーク19を介して、他のコンピュータに送信しても良い。
【0047】
次に、図11を参照しながら、マップマッチング装置1の動作の詳細について説明する。
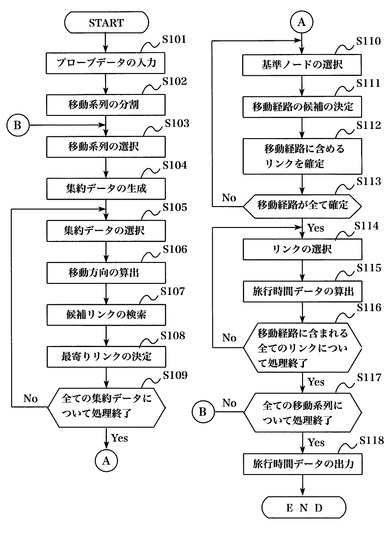
図11は、本実施の形態におけるマップマッチング装置1において実行されるマップマッチング処理の流れを説明するフローチャートである。
【0048】
図11に示すように、制御部3は、プローブデータ入力手段21によってプローブデータが入力されると(S101)、移動系列分割手段22によって移動系列を分割する(S102)。
【0049】
次に、制御部3は、処理を行う移動系列を選択する(S103)。移動系列は、例えば、移動系列に含まれるプローブデータの時系列順に選択する。
次に、制御部3は、集約データ生成手段23によって集約データを生成する(S104)。
【0050】
次に、制御部3は、処理を行う集約データを選択する(S105)。集約データは、例えば、集約データが保持する時刻情報の時系列順に選択する。
次に、制御部3は、移動方向算出手段24によって集約データの移動方向を算出する(S106)。そして、候補リンク検索手段25によって候補リンクの検索を行い(S107)、最寄りリンク決定手段26によって候補リンクの中から最寄りリンクを決定する(S108)。
次に、制御部3は、全ての集約データについて処理が終了したか確認する(S109)。
処理が終了していない場合、S105から繰り返す。
処理が終了している場合、S110に進む。
【0051】
次に、制御部3は、移動経路特定手段27によってS110からS113の処理を行う。
制御部3は、処理を行う基準ノードを選択する(S110)。基準ノードは、1回目の処理であれば出発地点であり、2回目以降の処理であれば前回のS112で確定されたリンクに係るノード(例えば、リンクABが前回のS112で確定されたリンクであれば、ノードB)となる。
次に、制御部3は、移動経路の候補を決定し(S111)、移動経路に含めるリンクを確定する(S112)。
次に、制御部3は、移動経路が全て確定したか確認する(S113)。
全て確定していない場合、S110から繰り返す。
全て確定している場合、S114に進む。
【0052】
次に、制御部3は、処理を行うリンクを選択する(S114)。リンクは、例えば、移動経路の出発地点を含むリンクから時系列順に選択する。
次に、制御部3は、旅行時間データ算出手段28によって旅行時間データを算出する(S115)。
次に、制御部3は、移動経路に含まれる全てのリンクについて処理が終了したか確認する(S116)。
処理が終了していない場合、S114から繰り返す。
処理が終了している場合、S117に進む。
【0053】
次に、制御部3は、全ての移動系列について処理が終了したか確認する(S117)。
処理が終了していない場合、S103から繰り返す。
処理が終了している場合、S118に進む。
【0054】
最後に、制御部3は、旅行時間データ出力手段29によって旅行時間データを出力し(S118)、処理を終了する。
【0055】
以上説明したように、本発明の実施の形態によれば、制御部3は、移動系列単位に分割されたプローブデータを局所的に集約し、集約データを作成する。次に、制御部3は、集約データの移動方向を算出するとともに、集約データを関連付ける候補リンクを検索する。次に、制御部3は、候補リンクの中から集約データの移動方向に最も近い方向を持つ最寄りリンクを決定し、集約データの位置座標から最寄りリンクへ引いた垂線の足を最寄り点とする。そして、制御部3は、最寄り点の集合を用いて、移動経路に含めるリンクを1つずつ確定していき、移動経路を特定する。ここで、移動経路を特定するロジックは、最寄り点の総数と最寄りリンクに対するヒット数とを用いるものでも良いし、最寄りリンクごとの最寄り点の総数を最寄りリンクの長さで除した値を用いるものでも良い。
【0056】
本発明の実施の形態によって、携帯端末によって収集したプローブデータから、精度良くデジタル道路地図データ上の移動経路を特定するマップマッチング装置を提供することができる。特に、プローブデータを局所的に集約することで、処理の効率化と高速化を図ることができる。また、移動経路に含めるリンクを1つずつ確定していくことで、正確な移動経路を特定することができる。
【0057】
以上、添付図面を参照しながら、本発明に係るマップマッチング装置等の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【図面の簡単な説明】
【0058】
【図1】マップマッチング装置1を実現するコンピュータのハードウェア構成図
【図2】マップマッチング装置1の機能の概要を示すブロック図
【図3】プローブデータを集約データに集約する1例を示す図
【図4】集約データの移動方向を算出する1例を示す図
【図5】候補リンクを検索する1例を示す図
【図6】最寄りリンクを決定する1例を示す図
【図7】最寄り点61の集合の1例を示す図
【図8】図7の例における最寄り点の総数と最寄りリンクの総数を示す図
【図9】図7の例における最寄りリンクの長さを示す図
【図10】図7の例における最寄り点の総数をリンクの長さで除した値の合計値を示す図
【図11】マップマッチング処理の流れを説明するフローチャート
【符号の説明】
【0059】
1………マップマッチング装置
3………制御部
5………記憶部
7………メディア入出力部
9………通信制御部
11………入力部
13………表示部
15………周辺機器I/F部
17………バス
19………ネットワーク
【特許請求の範囲】
【請求項1】
位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング装置であって、
同一ユーザに係る前記プローブデータ群をデータ取得間隔に基づいて移動系列単位に分割する移動系列分割手段と、
同一移動系列に係る前記プローブデータ群を局所的に集約した集約データ群を生成する集約データ生成手段と、
前記集約データの移動方向を算出する移動方向算出手段と、
前記集約データを関連付ける候補リンクを検索する候補リンク検索手段と、
前記候補リンクの中から前記移動方向に最も近い方向を持つ最寄りリンクを決定する最寄りリンク決定手段と、
前記集約データの位置座標から前記最寄りリンクへ引いた垂線の足である最寄り点の集合を用いて前記移動経路を特定する移動経路特定手段と、
を具備することを特徴とするマップマッチング装置。
【請求項2】
前記移動経路に含まれる前記リンクごとに、リンク進入時刻、リンク退出時刻、リンク移動時間を含む旅行時間データを算出する旅行時間データ算出手段、
を更に具備することを特徴とする請求項1に記載のマップマッチング装置。
【請求項3】
前記移動経路特定手段は、前記最寄り点の総数と前記最寄りリンクに対するヒット数とを用いるものであることを特徴とする請求項1または請求項2に記載のマップマッチング装置。
【請求項4】
前記移動経路特定手段は、前記最寄りリンクごとの前記最寄り点の総数を前記最寄りリンクの長さで除した値を用いるものであることを特徴とする請求項1または請求項2に記載のマップマッチング装置。
【請求項5】
前記移動経路特定手段は、前記移動経路に含める前記リンクを1つずつ確定していくものであることを特徴とする請求項3または請求項4に記載のマップマッチング装置。
【請求項6】
位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング方法であって、
同一ユーザに係る前記プローブデータ群をデータ取得間隔に基づいて移動系列単位に分割するステップと、
同一移動系列に係る前記プローブデータ群を局所的に集約した集約データ群を生成するステップと、
前記集約データの移動方向を算出するステップと、
前記集約データを関連付ける候補リンクを検索するステップと、
前記候補リンクの中から前記移動方向に最も近い方向を持つ最寄りリンクを決定するステップと、
前記集約データの位置座標から前記最寄りリンクへ引いた垂線の足である最寄り点の集合を用いて前記移動経路を特定するステップと、
を含むことを特徴とするマップマッチング方法。
【請求項7】
前記移動経路に含まれる前記リンクごとに、リンク進入時刻、リンク退出時刻、リンク移動時間を含む旅行時間データを算出するステップ、
を更に含むことを特徴とする請求項6に記載のマップマッチング方法。
【請求項8】
前記移動経路を特定するステップは、前記最寄り点の総数と前記最寄りリンクの総数とを用いるものであることを特徴とする請求項6または請求項7に記載のマップマッチング方法。
【請求項9】
前記移動経路を特定するステップは、前記最寄りリンクごとの前記最寄り点の総数を前記最寄りリンクの長さで除した値を用いるものであることを特徴とする請求項6または請求項7に記載のマップマッチング方法。
【請求項10】
前記移動経路を特定するステップは、前記移動経路に含める前記リンクを1つずつ確定していくものであることを特徴とする請求項8または請求項9に記載のマップマッチング方法。
【請求項11】
コンピュータを請求項1から請求項5までのいずれかに記載のマップマッチング装置として機能させるプログラム。
【請求項1】
位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング装置であって、
同一ユーザに係る前記プローブデータ群をデータ取得間隔に基づいて移動系列単位に分割する移動系列分割手段と、
同一移動系列に係る前記プローブデータ群を局所的に集約した集約データ群を生成する集約データ生成手段と、
前記集約データの移動方向を算出する移動方向算出手段と、
前記集約データを関連付ける候補リンクを検索する候補リンク検索手段と、
前記候補リンクの中から前記移動方向に最も近い方向を持つ最寄りリンクを決定する最寄りリンク決定手段と、
前記集約データの位置座標から前記最寄りリンクへ引いた垂線の足である最寄り点の集合を用いて前記移動経路を特定する移動経路特定手段と、
を具備することを特徴とするマップマッチング装置。
【請求項2】
前記移動経路に含まれる前記リンクごとに、リンク進入時刻、リンク退出時刻、リンク移動時間を含む旅行時間データを算出する旅行時間データ算出手段、
を更に具備することを特徴とする請求項1に記載のマップマッチング装置。
【請求項3】
前記移動経路特定手段は、前記最寄り点の総数と前記最寄りリンクに対するヒット数とを用いるものであることを特徴とする請求項1または請求項2に記載のマップマッチング装置。
【請求項4】
前記移動経路特定手段は、前記最寄りリンクごとの前記最寄り点の総数を前記最寄りリンクの長さで除した値を用いるものであることを特徴とする請求項1または請求項2に記載のマップマッチング装置。
【請求項5】
前記移動経路特定手段は、前記移動経路に含める前記リンクを1つずつ確定していくものであることを特徴とする請求項3または請求項4に記載のマップマッチング装置。
【請求項6】
位置情報と時刻情報とを含むプローブデータから、ノードとリンクとで構成されたデジタル道路地図データ上の移動経路を特定するマップマッチング方法であって、
同一ユーザに係る前記プローブデータ群をデータ取得間隔に基づいて移動系列単位に分割するステップと、
同一移動系列に係る前記プローブデータ群を局所的に集約した集約データ群を生成するステップと、
前記集約データの移動方向を算出するステップと、
前記集約データを関連付ける候補リンクを検索するステップと、
前記候補リンクの中から前記移動方向に最も近い方向を持つ最寄りリンクを決定するステップと、
前記集約データの位置座標から前記最寄りリンクへ引いた垂線の足である最寄り点の集合を用いて前記移動経路を特定するステップと、
を含むことを特徴とするマップマッチング方法。
【請求項7】
前記移動経路に含まれる前記リンクごとに、リンク進入時刻、リンク退出時刻、リンク移動時間を含む旅行時間データを算出するステップ、
を更に含むことを特徴とする請求項6に記載のマップマッチング方法。
【請求項8】
前記移動経路を特定するステップは、前記最寄り点の総数と前記最寄りリンクの総数とを用いるものであることを特徴とする請求項6または請求項7に記載のマップマッチング方法。
【請求項9】
前記移動経路を特定するステップは、前記最寄りリンクごとの前記最寄り点の総数を前記最寄りリンクの長さで除した値を用いるものであることを特徴とする請求項6または請求項7に記載のマップマッチング方法。
【請求項10】
前記移動経路を特定するステップは、前記移動経路に含める前記リンクを1つずつ確定していくものであることを特徴とする請求項8または請求項9に記載のマップマッチング方法。
【請求項11】
コンピュータを請求項1から請求項5までのいずれかに記載のマップマッチング装置として機能させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−9443(P2009−9443A)
【公開日】平成21年1月15日(2009.1.15)
【国際特許分類】
【出願番号】特願2007−171531(P2007−171531)
【出願日】平成19年6月29日(2007.6.29)
【出願人】(591115475)株式会社三菱総合研究所 (12)
【Fターム(参考)】
【公開日】平成21年1月15日(2009.1.15)
【国際特許分類】
【出願日】平成19年6月29日(2007.6.29)
【出願人】(591115475)株式会社三菱総合研究所 (12)
【Fターム(参考)】
[ Back to top ]