
マテリアル取扱システム
【課題】高効率のマテリアル取扱システム(AMHS)を提供する。
【解決手段】本発明は、マテリアル取扱システムであり、複数の貯蔵容器を含み、各貯蔵容器は、少なくともマテリアルの1ユニットを保持するようになっている少なくとも一つの貯蔵ユニット、及び、少なくとも一つのオーバーヘッドホイストを含み、このオーバーヘッドホイストは、所定の位置へ搬送するために複数の貯蔵容器の選ばれた一つにおける少なくとも一つのマテリアル・ユニットに直接にアクセスできるオーバーヘッドホイスト搬送サブシステム、を備える。
【解決手段】本発明は、マテリアル取扱システムであり、複数の貯蔵容器を含み、各貯蔵容器は、少なくともマテリアルの1ユニットを保持するようになっている少なくとも一つの貯蔵ユニット、及び、少なくとも一つのオーバーヘッドホイストを含み、このオーバーヘッドホイストは、所定の位置へ搬送するために複数の貯蔵容器の選ばれた一つにおける少なくとも一つのマテリアル・ユニットに直接にアクセスできるオーバーヘッドホイスト搬送サブシステム、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、広くはマテリアルの自動化取扱システムに関し、さらに詳しくは、オーバーヘッド(頭上)ホイストが仕掛品(ワーク−イン−プロセス)(以下、WIPという)のパーツ類にWIPストレージユニットから直接にアクセスできて、マテリアル取扱システム全体の効率を高めるマテリルの自動化取扱システムに関するものである。
【背景技術】
【0002】
マテリアルを自動的に取り扱うシステムは、既知のものであって、これらは、製品製造の状態においてWIPストレージユニット及びオーバーヘッド(頭上)ホイストを用いて、WIPパーツ類を貯蔵し、各種のワークステーション及び/又は処理マシン類の間を搬送するようになっている。例えば、このような自動化マテリアル取扱システム(以下、AMHSという)は、一般的には集積回路(IC)チップ類の製造に使用されている。ICチップ類製造のプロセスには、種々の工程が含まれていて、これら工程には、被着、クリーニング、イオン注入、エッチング及び不動態化工程が含まれている。さらに、ICチップ製造における、これらの工程のそれぞれは、化学蒸着チャンバ、イオン注入チャンバ又はエッチング機械のような異なる処理機械によってなされているのが通常である。したがって、例えば半導体ウエファのようなWIPパーツ類は、一般的には、多数回にわたり異なるワークステーション及び/又は処理機械の間を行き来され、ICチップ製造に必要な各種の処理工程を経るようになっている。
【0003】
ICチップ類製造の在来のAMHSは、半導体ウエファを貯蔵する複数のWIP貯蔵ユニット(“ストッカー”としても知られている)及びICチップ製造工場の床に設置された各種のワークステーション及び処理機械にウエファー類を搬送する一つ又は複数のオーバーヘッドホイスト搬送車を備えている。WIPストッカーに貯蔵された半導体ウエファーは、通常、複数のフロント・オープニング・ユニファイド・ポッド(以下、FOUPsという)のような複数のカセットポッドに入れられ、引き続いて、吊り下げられたトラックにそって走行するオーバーヘッドホイスト搬送車へ移される。在来のAMHSにおいては、各ストッカーには、複数のアクティブ・インプット/アウトプットポートが備えられているのが一般的であって、これらポートは、内部のロボットアーム(3本又はそれ以上の可動軸をもつ)と関連して前記FOUPsを前記ストッカーへ移し入れたり、移し出したりするようになっている。前記FOUPsは、前記オーバーヘッドホイスト搬送車により前記インプット/アウトプットポートから引き上げられたり、置かれたりする。
【発明の概要】
【発明が解決しようとする課題】
【0004】
在来のAMHSの一つの欠点は、前記ロボットアームが前記WIPストッカーの複数のアクティブ・インプット/アウトプットポートにある前記FOUPsに近づくのに必要な時間により前記システム全体の効率に限界がある点である。半導体ウエファーの一般的にデリケートな品質のために、前記ロボットアームを加速させるには、厳格な制約があるのが通常である。この理由により、前記FOUPsを前記ストッカーの複数のインプット/アウトプットポートへ接近させたり、離去させたりするための時間は、最短のものが要求されるのが通常である。この最短の移動時間は、大まかに言えば、前記ストッカーのスループットを決定し、所望のICチップ製造レベルを保つに必要なストッカーの数に相当し、したがって、前記AMHSの全体のコストに影響してしまう。前記AMHSのマテリアル取扱効率は、各ストッカーにおけるアクティブ・インプット/アウトプットポートの数を増やし、オーバーヘッドホイスト搬送車が同時に多数のインプット/アウトプット・ポートに達するようにすることで向上されるが、インプット/アウトプット・ポートを増やすと、ストッカーのコストが大幅に高くなってしまう。
【0005】
さらに、前記ストッカーにおける、それぞれが1〜3軸の運動をする3軸またはそれ以上の軸運動の内部ロボットをいくつかのインプット/アウトプットポートに組み合わせることは、代表的なストッカーは、5乃至16の軸運動をすることになる。これは、マテリアルの貯蔵には、極めて複雑で、信頼性に劣り、コスト高になる解決策になる。
【0006】
したがって,マテリアルの取扱効率を向上させる一方、在来のマテリアル自動化取扱システムの欠点を打破した マテリアル自動化取扱システムの実現が要望されている。
【0007】
この発明によれば、高能率のマテリアル自動化取扱システム(AMHS)が提供され、これによって、仕掛品(ワーク−イン−プロセス)(WIPと略記)パーツ類を前記システムに含まれている一つ又はそれ以上のWIP貯蔵ユニットへの出し入れが行えるようになる。
【課題を解決するための手段】
【0008】
一つの実施例においては、改良されたAMHSは、オーバーヘッドホイスト搬送サブシステム及び複数の貯蔵容器を含む少なくとも一つの縦型回転コンベヤWIP貯蔵ユニット(“ストッカー”)を備えている。このオーバーヘッドホイスト搬送サブシステムは、少なくとも一つの所定のルートがきめられている架設のトラック(軌道)にそって走行するオーバーヘッドホイスト搬送車を含む。この所定のルートは、前記縦型回転コンベヤストッカーの上を通り、オーバーヘッドホイストが回転コンベヤの貯蔵容器の選ばれた一つから一つ又はそれ以上のWIPパーツ類に直にアクセスできるようになっている。この第1の実施例においては、所望のWIPロットを入れた選ばれた回転コンベヤの貯蔵容器は、架設トラックの実質的直下の縦型回転コンベヤストッカーの頂部に位置するようにされる。ついで、オーバーヘッドホイスト搬送車は、架設のトラックにそって、選ばれた回転コンベヤの貯蔵容器の実質的な直上に動かされる。ついで、このオーバーヘッドホイストを選ばれた貯蔵容器に向けて下降させる。最後に、前記オーバーヘッドホイストを操作して、前記回転コンベヤの貯蔵容器から直に所望のWIPロットを取り上げたり、又は、前記回転コンベヤの貯蔵容器内へ一つ又は複数の所望のWIPロットを納める。
【0009】
第2の実施例においては、架設トラックの所定のルートは、縦型回転コンベヤWIPストッカーに対し平行に走っており、これによって前記オーバーヘッドホイストが前記回転コンベヤの貯蔵容器の一つから一つ又はそれ以上のWIPパーツにアクセスできるようになっている。さらに前記AMHSは、引き出し機構を備え、これは、縦型回転コンベヤストッカーと共に作用して所望のWIPロットを含む選ばれた回転コンベヤの貯蔵容器を前記トラックに対する適当な位置に位置させる。例えば、前記引き出し機構は、単一のサーボ制御軸にそって、前記トラックに近接の第1の位置から前記トラックの実質的な直下の第2の位置へ前記回転コンベヤの貯蔵容器(例えば、可動の棚)を動かすようになっている。この第2の実施例においては、前記オーバーヘッドホイスト搬送車は、前記トラックにそって動かされて、前記第2の位置の実質的な直上位置へ動かされる。ついで、前記オーバーヘッドホイストは、第2の位置へ下降される。別の実施例においては、前記選ばれた回転コンベヤの貯蔵容器は、前記トラックにそって位置する棚を備え、前記オーバーヘッドホイストは、移動ステージに取り付けられて、前記オーバーヘッドホイスト搬送車の側面にある前記棚から一つ又はそれ以上のWIPロットを取り上げたり、配置したりするようになっている。最後に、前記オーバーヘッドホイストを操作して、前記選ばれた貯蔵容器から所望のWIPロットを取り上げたり、又は、前記選ばれた貯蔵容器内へ一つ又はそれ以上のWIPロットを納めるようにする。
【0010】
前記AMHSにより前記オーバーヘッドホイストで前記それぞれの貯蔵容器の上方位置で前記回転コンベヤの貯蔵容器から所望のWIPロットを取り上げたり、前記回転コンベヤの貯蔵容器内へ一つ又はそれ以上のWIPロットを納めることで、より効率がよいAMHS操作が達成できる。
【0011】
この発明のその他の特徴、機能及びアスペクツは、以下の発明の詳細な記述から明らかになる。
【図面の簡単な説明】
【0012】
【図1】在来のマテリアル自動化取扱システムの斜視図。
【図2】この発明によるマテリアル自動化取扱システムの第1の実施例の略図。
【図3】図2のマテリアル自動化取扱システムの第2の実施例の略図。
【図4】図2のマテリアル自動化取扱システムの第3の実施例の略図。
【図5a】この発明による固定貯蔵位置にアクセスするオーバーヘッドホイスト搬送車の略図。
【図5b】この発明による固定貯蔵位置にアクセスするオーバーヘッドホイスト搬送車の略図。
【図6】コンベヤにあるマテリアルにアクセスする図5a〜図5bのオーバーヘッドホイスト搬送車の略図。
【図7】図2のマテリアル自動化取扱システムの操作方法のフローダイアグラム。
【発明を実施するための形態】
【0013】
この出願は、縦型輪状コンベヤ及びオーバーヘッド(頭上)ホイストを組み合わせたものを基にした半導体製造のためのマテリアルの自動化取扱システムと題する2002年6月19日出願の米国仮特許出願第60/389,993号及び移動棚又は移動ホイストプラットフォームを用いるオフセット・ゼロ・フットプリント・ストレージ(ZFS)と題する2002年10月11日出願の米国仮特許出願第60/417,993号をここに参考文献として、この明細書に組み入れるものとする。
【0014】
記載されたマテリアル自動化取扱システム(以下AMHSという)は、仕掛品(以下WIPという)パーツ類を効率よくWIPストレージユニットに出し入れできるようになっている。ここに記載のAMHSは、WIPストレージユニットの縦型輪状コンベヤにおける貯蔵容器の上部からの出し入れを、それぞれの貯蔵容器の上に位置したオーバーヘッドホイストにより行うことでマテリアルの取扱効率を向上するようにしたものである。
【0015】
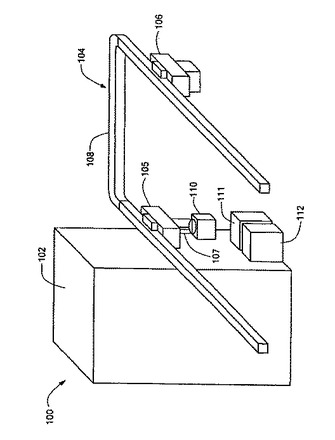
図1は、在来のAMHS100を示すもので、製品製造環境、例えば、集積回路(IC)チップ類製造のためのクリーン環境のもとでWIPパーツ類を種々のワークステーション及び/又は処理マシン類へ自動的に貯蔵し、搬送するために使用されるものである。図1に示すように、在来のAMHS100は、WIPストレージユニット(“ストッカー”)102とオーバーヘッドホイスト搬送システム104を備えている。WIPストッカー102は、インプットポート111とアウトプットポート112を含み、オーバーヘッドホイスト搬送システム104は、架設されたトラック108と、このトラック108にそって動くオーバーヘッドホイスト搬送車105と106を含む。通常の運転モードにおいては、WIPパーツ類は、フロント・オープニング・ユニファイド・ポッド(以下FOUPという)のようなカセットポッド110に入れられて搬送される。第1番目のオーバーヘッドホイスト搬送車105は、トラック108にそって動き、FOUP110をストッカー102のインプットポート111におろしたり、アウトプットポート112から別のFOUPを引き上げたりするための適当な位置で停まるようになっている。さらに、第2番目のオーバーヘッドホイスト搬送車106は、第1番目のオーバーヘッドホイスト搬送車105が前記FOUPの積み卸しが終って出発進行するまで、トラック108に待機している。
【0016】
在来のAMHS100においては、前記FOUPは、オーバーヘッドホイストからインプットポート111へおろされ、アウトプットポート112からオーバーヘッドホイストへ引き上げるようになっているか、又は、別にストッカー102内から3軸又はそれ以上の軸の動きをするようになっているロボットアーム107が接近するようになっている。さらに、ストッカー102から前記FOUPへ接近するのに必要な最短時間でストッカーのスループットが決まるのが通常であるからストッカーの数が所望の生産レベルを保つのに必要になる。したがって、前記FOUPへアクセスするための多軸ロボットアーム107の複雑な動きで最短時間が長くなってしまい、これによって、AMHS100に必要なストッカーの数とマテリアル取扱システムの全体のコストの両者を高めてしまう。
【0017】
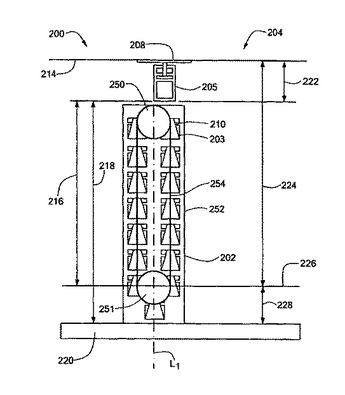
図2は、この発明によるマテリアル自動化取扱システムの図解実施例である。この図解実施例においては、AMHS200は、オーバーヘッド搬送システム204及び少なくとも1基の縦型輪状コンベヤWIPストレージユニット(“ストッカー”)202を備えており、後者は、コンベヤ貯蔵容器203のような複数の貯蔵容器を含んでいる。前記縦型コンベヤWIPストッカー202は、オーバーヘッド搬送システム204におけるオーバーヘッドホイストが前記コンベヤ貯蔵容器の選ばれた一つの容器からWIPパーツ類を直接取り上げるようになっている。
【0018】
注目すべきは、在来のAMHS100と同様に、図2のAMHSは、200mm又は300mmFABプラントのようなICチップ類の製造のためのクリーンな環境又は他の適当な製品製造環境のもとで使用されるようになっている。図2に示すように、ICチップ類製造環境は、第1のフロアー220と第2のフロアー226及び天井214を含んでいる。第1のフロアー220は、補強コンクリートから作られた格子状スラブを備え、第2のフロアー226は、前記格子状スラブ220の上にある高くなっているフロアーを備えている。縦型コンベヤストッカー202は、格子状スラブ220に設置されている。さらに、ICチップ類を製造するための種々の処理加工工程を行うようになっているワークステーション及び/又は処理加工マシン類(図示せず)が高くなっているフロアー226に設置されており、これらは、不導体のマテリアルでカバーされ、特定の負荷及び地震に耐えるようになっている。例えば、高くされているフロアー226は、格子状スラブ220から距離228(約0.6m)高さ寸法になっており、距離224(約4.15m以上または同等)をもって天井214から離れている。
【0019】
ここに示す実施例においては、縦型コンベヤストッカー202は、ハウジング252を含み、このハウジング252内に第1プーリー250、第2プーリー251及びベルト254が配置されている。図2に示すように、複数のコンベヤ貯蔵容器(例えば、貯蔵容器203)は、前記ベルトにそって種々の間隔をおいてベルト254に取り付けられており、ベルト254は、第1と第2のプーリー250,251にかけわたされて、前記複数の貯蔵容器が前記プーリー250,251に一方を駆動することで前記ベルトの経路にそってぐるぐる回転するようになっている。例えば、縦型コンベヤストッカー202は、高さ(約3.85m)をもっている。縦型コンベヤストッカー202は、したがって、高くなっているフロアー226から距離216(3.25m)の高さになっている。
【0020】
上記のように、縦型コンベヤストッカー202は、オーバーヘッドホイストが前記コンベヤ貯蔵容器の一つから直接に半導体ウエハーのようなWIPパーツ類に達することができるようになっている。図解の実施例においては、天井214近くのストッカーハウジング252の部分は、少なくとも部分的に開放されていて、選ばれたコンベヤ貯蔵容器から又はコンベヤ貯蔵容器への出し入れが可能になっている。さらに、各コンベヤ貯蔵容器は、固定の棚を備え、半導体ウエハーは、棚203に配置のフロント・オープン・ユニファイド・ポッド(FOUP)210のようなカセットポッド類へ置かれるようになっている。例えば、各FOUPは、一つ又は複数の半導体ウエファー・ロットを保持し、これによって、オーバーヘッドホイストは、単独のコンベヤ貯蔵容器における多数のウエファー・ロットに同時にアクセスできる。
【0021】
前記オーバーヘッド搬送システム204には、架設されたトラック208と、このトラック208にそって走行する少なくとも一つのオーバーヘッドホイスト搬送車205が含まれている。架設のトラック208は、縦型コンベヤストッカー202の上を通る少なくとも一つの所定のルートをもち、これによって、オーバーヘッドホイスト搬送車205がストッカー202の頂部にほぼ位置するコンベヤ貯蔵容器の一つにおけるFOUPへ直接にアクセスできる。例えば、オーバーヘッドホイスト搬送車205は、天井214から距離222(約0.9m)離れている。
【0022】
図解した操作モードにおいては、FOUP210を入れた貯蔵容器203のような選ばれた貯蔵容器がトラック208の下方にある縦型コンベヤストッカー202の頂部にほぼ位置している。ついでオーバーヘッドホイスト搬送車205がトラック208にそって走行し、貯蔵容器203の実質的な直上位置に到達する。つぎに、オーバーヘッドホイストがオーバーヘッドホイスト搬送車205から降下し、ストッカーハウジング252の開口を通り、貯蔵容器203へ向かう。例えば、オーバーヘッドホイストは、ストッカーの長さ方向軸L1 に平行な方向にそって下げられる。ついで、オーバーヘッドホイストは、IC製造フロアーにあるワークステーション又は処理加工マシンへと運ぶために、貯蔵容器203からFOUP210を直接掴み上げる。理解されるべき点は、このオーバーヘッドホイストは、コンベヤ貯蔵容器203内にFOUPを入れることもできる点である。
【0023】
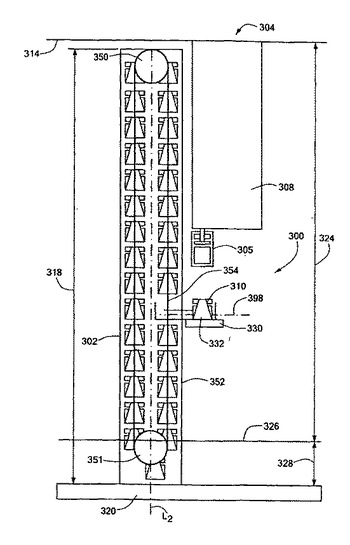
図3は、AMHS200(図2参照)の別の実施例300を示す。図3に示すように、AMHS300は、オーバーヘッド搬送システム304及び少なくとも一つの縦型コンベヤWIPストッカー302を備えており、このストッカーは、スライド可能に設置された貯蔵容器332のような複数の貯蔵容器を含む。縦型コンベヤストッカー202のように、縦型コンベヤストッカー302は、オーバーヘッド搬送システム304内のオーバーヘッドホイストがコンベヤ貯蔵容器の選ばれた一つにおける例えば半導体ウエファーのようなWIPパーツ類に対し直接アクセスできるようになっている。
【0024】
特には、AMHS300は、天井314、格子状スラブ320及び格子状スラブ320の上に位置する持ち上げられたフロアー326を含むICチップ製造環境において使用される。図3に示すように、高くなったフロアー326は、格子状スラブ320から距離328(約0.6m)をおいており、天井314から距離324(約5.4m以上)をおいている。さらに、縦型コンベヤストッカー302は、ハウジング352、ハウジング352内に配置の第1プーリー350、第2プーリー351、ベルト354を含んでいる。コンベヤ貯蔵容器(例えば、スライド可能に設置の貯蔵容器332)は、前記ベルト354に種々の間隔をおいて取り付けられており、ベルト354は、第1と第2のプーリー350,351にかけわたされて、該プーリー350,351の一方を駆動することで、前記複数の貯蔵容器がベルト経路にそってぐるぐる回転するようになっている。例えば、縦型回転ストッカー302は、高さ318(約6m)になっている。
【0025】
上記のように、縦型コンベヤストッカー302は、オーバーヘッドホイストがコンベヤ貯蔵容器の一つにおける半導体ウエファーに対し直接アクセスできるようになっている。図示の実施例では、ハウジング352の少なくとも一方の側面の少なくとも一部が開放されていて、選ばれたコンベヤ貯蔵容器がハウジング352内から引き出され、ついで、選ばれた貯蔵容器がオーバーヘッドホイストにより引き上げられたり、降ろされたりするようになっている。特に、AMHS300は、さらに、少なくとも一つの引き出し機構330を含み、この機構は、複数の半導体ウエファーをストッカー302から引き出し、オーバーヘッド搬送システム304に含まれている架設のトラック308に対し前記マテリアルを適切に配置する操作を行うようになっている。注目すべきは、各貯蔵容器は、可動棚又は固定棚を備えている点である。さらに、複数の半導体ウエファーは、棚332に配置されるFOUP310のようにカセットポッドに置かれる。
【0026】
オーバーヘッド搬送システム304は、架設のトラック308と、トラック308にそって走行するオーバーヘッドホイスト搬送車305とを含む。トラック308は、縦型コンベヤストッカ302と平行な少なくとも一つの所定の経路を持ち、これによって、オーバーヘッドホイスト搬送車305がスライド可能に設置の貯蔵容器の選ばれた一つにおけるFOUPに直接アクセスすることができるようになっている。
【0027】
図解の操作モードにおいては、FOUP310を入れた貯蔵容器332などのような選ばれたスライド可能な貯蔵容器は、前記引き出し機構330がストッカー330内から貯蔵容器332を引き出すことができる位置におかれ、貯蔵容器332は、トラック308の直下におかれる。注目すべき点は、引き出し機構330がストッカー302に組み込まれていて、貯蔵容器332が単一のサーボ制御軸398にそって動くようになっている点である。ついでオーバーヘッドホイスト搬送車305がトラック308にそって動き、引き出された貯蔵容器332の真上に来るようになっている。ついで、オーバーヘッドホイストがオーバーヘッドホイスト搬送車305から貯蔵容器332に向け、例えば、前記ストッカーの長さ方向軸と平行になって降下してくる。オーバーヘッドホイストは、ついで、貯蔵容器332からFOUP310を直接に取り出し、ICチップ製造フロアーにあるワークステーション又は処理加工マシンへ搬送するようになっている。理解すべきは、オーバーヘッドホイストは、回転コンベヤの貯蔵容器332へFOUPを入れる操作も行う点である。
【0028】
図4は、AMHS300(図3参照)の詳細な実施態様を示す。図示の実施例では、AMHS400は、オーバーヘッドホイスト搬送システム404と縦型回転コンベヤストッカー402を備えている。このオーバーヘッドホイスト搬送システム404には、架設されたトラック408と、トラック408にそって走行するオーバーヘッドホイスト搬送車405とが含まれている。例えば、オーバーヘッドホイスト搬送車405は、トラック408から距離436(約0.9m)をおいている。縦型回転コンベヤストッカー402は、ストッカーハウジング内に配置の貯蔵容器432のような複数の回転コンベヤ貯蔵容器を含む。例えば、貯蔵容器432は、一段高くなっているICチップ製造フロアーから距離438(約2.6m)だけ離れている。
【0029】
上記のように、FOUP410は、ストッカーハウジング内から引き出されて、選ばれた貯蔵容器へと移し入れられたり、移し出されたりするようになっている。オーバーヘッドホイスト搬送車405は、さらに、オーバーヘッドホイスト431を含み、このホイストは、FOUP410を貯蔵容器432へ上方から出し入れするためのグリッパー(把持部)を有している。好ましい実施例においては、このホイストグリッパー430は、移動ステージに取り付けられていて、オーバーヘッドホイストでオーバーヘッドホイスト搬送車405のいずれかの側面からカセットポッドを取り上げたり、該側面に配置したりするようになっている。
【0030】
図5a〜図5bは、固定の貯蔵位置へアクセスするオーバーヘッドホイスト搬送車サブシステム704を示す。図示の実施例では、オーバーヘッドホイスト搬送車サブシステム704は、架設トラック708及びこのトラックにそって走行するオーバーヘッドホイスト搬送車705を含む。このオーバーヘッドホイスト搬送車705でFOUP710を固定の貯蔵位置732から取り上げたり、配置したりするようになっている。例えば、オーバーヘッドホイスト搬送車705は、天井714から距離736(約0.9m)だけ離れており、貯蔵位置732は、ICチップ製造フロアーから距離738(約2.6m)をおいた上方にある。さらに、天井714は、高くなっているフロアーから距離790(約3.66m)離れた上にある。
【0031】
オーバーヘッドホイスト搬送車705は、架設のトラック708の直下になる位置からFOUP710を取り上げ(そして配置する)。この目的のために、オーバーヘッドホイスト搬送車705は、移動ステージに取り付けられ且つ搬送車705から突き出てFOUP710を取り上げ、さらに、これを搬送車705へ引き戻すホイストグリッパー731を備え、このようにしてFOUP710をオーバーヘッドホイスト搬送車705内で移動させるようになっている(図5b参照)。好ましい実施例では、前記移動ステージによりオーバーヘッドホイストでカセットポッドをオーバーヘッドホイスト搬送車705のいずれかの側面から取り上げたり、配置したりするようになっている。FOUP710がホイストグリッパー730に保持されると、オーバーヘッドホイスト搬送車705がそれをINチップ製造フロアーのワークステーション又は処理加工マシンへと運ぶ。
【0032】
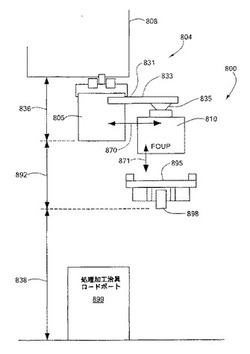
図6は、コンベヤ895の上にあるか又は移動中のマテリアルにアクセスするオーバーヘッドホイスト搬送車システム800を図示する。特には、オーバーヘッドホイスト搬送サブシステム804を用いて、FOUP810をオーバーヘッドレールをベースとするコンベヤ895から直接取り上げたり、配置したりするようになっている。図示の実施例では、オーバーヘッドホイスト搬送サブシステム804は、架設されたトラック808と、トラック808にそって走行するオーバーヘッドホイスト搬送車805を含んでいる。例えば、オーバーヘッドホイスト搬送車805は、トラック808から距離836(約0.9m)をおいた下方にあり、レールにのったコンベヤ895から距離892(約0.35m)をおいた上方に位置する。さらに、オーバーヘッドレール898は、高くなっているICチップ製造フロアーから距離838(約2.6m)をおいた上方に位置する。理解されるべき点は、レール898は、図面の面に対し垂直方向にある点である。オーバーヘッドホイスト搬送車システム800は、さらに、処理加工治具ロードポート899を含んでいる。
【0033】
オーバーヘッドホイスト搬送車805を用いて、レールに乗せられたコンベヤ895への上方からの積み卸しを行うようになっている。この目的のために、オーバーヘッドホイスト搬送車805には、ホイストグリッパー835をもつオーバーヘッドホイスト831が含まれていて、これは、移動ステージ833に取り付けられ、これは、矢印870,871それぞれに示すように、水平及び垂直移動できるようになっている。図示の操作モードにおいては、レールに乗っているコンベヤ895が動いてFOUP810をオーバーヘッドホイスト831の直下に位置させる。ついで、移動ステージ833を介してホイストグリッパー835がFOUP810に向けて降下し、コンベヤ895からFOUP810を直接掴み上げる。ついで、FOUP810を保持しているホイストグリッパー835を移動ステージ833を介して引き上げて後退させ、このようにしてFOUP810をオーバーヘッドホイスト搬送車805内へ移動させる。ついで搬送車805でFOUP810をICチップ製造フロアーのワークステーション又は処理加工マシンへ運ぶ。
【0034】
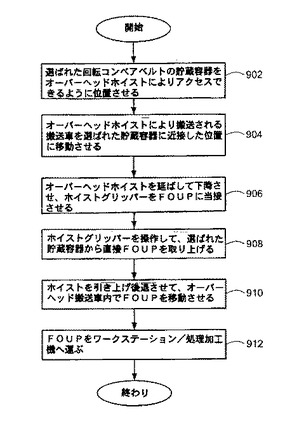
ここに記載のマテリアル自動化取扱システムの操作方法を図7を参照しながら解説する。工程902で示すように、FOUPを入れた選ばれた貯蔵容器は、縦型回転コンベヤストッカー内に配置され、オーバーヘッドホイストがアクセスできるようにされる。例えば、選ばれた回転コンベヤの貯蔵容器は、縦型回転コンベヤストッカーの頂部又は側部に位置される(図2〜図3参照)。ついで、工程904で示すように、オーバーヘッドホイスト搬送車をトラックにそって動かし,選ばれた貯蔵容器の近くへと移動させる。選ばれた貯蔵容器を前記ストッカーの頂部に位置させる場合には、オーバーヘッドホイスト搬送車は、前記貯蔵容器の直上に位置することになる。選ばれた貯蔵容器を前記ストッカーの側面に位置させる場合には、オーバーヘッドホイスト搬送車は、前記貯蔵容器の側面に位置することになる。ついで工程906で示すようにオーバーヘッドホイストを前記搬送車から突き出して降下させ、前記ホイストグリッパーを選ばれた貯蔵容器内のFOUPに当接させる。ついで、工程908で示すように、ホイストグリッパーを操作して、前記貯蔵容器からFOUPを直に取り上げる。ついで、工程910で示すように、オーバーヘッドホイストを引き上げ、後退させ、FOUPをオーバーヘッドホイスト搬送車内へ移す。このようにして、FOUPは、選ばれた貯蔵容器からオーバーヘッドホイスト搬送車へ移される。最後に、工程912で示すように、オーバーヘッドホイスト搬送車でFOUPを製品製造フロアーにおけるワークステーション又は処理加工マシンへ運ぶ。
【0035】
当業者によれば、上記のマテリアル自動化取扱システムのモディフィケーション及び改変が、ここに記載の発明の概念から逸脱することなしに行われる点を理解すべきである。したがって、この発明は、添付の請求の範囲の範囲と精神による点を別として限定して解釈されるべきではない。
【符号の説明】
【0036】
200 AMHS
202 ストッカー
203 貯蔵容器
204 オーバーヘッドホイスト搬送システム
205 搬送車
208 トラック
210 FOUP
214 天井
220 第1のフロアー
226 第2のフロアー
250 第1のプーリー
251 第2のプーリー
252 ストッカーハウジング
254 ベルト
【技術分野】
【0001】
この発明は、広くはマテリアルの自動化取扱システムに関し、さらに詳しくは、オーバーヘッド(頭上)ホイストが仕掛品(ワーク−イン−プロセス)(以下、WIPという)のパーツ類にWIPストレージユニットから直接にアクセスできて、マテリアル取扱システム全体の効率を高めるマテリルの自動化取扱システムに関するものである。
【背景技術】
【0002】
マテリアルを自動的に取り扱うシステムは、既知のものであって、これらは、製品製造の状態においてWIPストレージユニット及びオーバーヘッド(頭上)ホイストを用いて、WIPパーツ類を貯蔵し、各種のワークステーション及び/又は処理マシン類の間を搬送するようになっている。例えば、このような自動化マテリアル取扱システム(以下、AMHSという)は、一般的には集積回路(IC)チップ類の製造に使用されている。ICチップ類製造のプロセスには、種々の工程が含まれていて、これら工程には、被着、クリーニング、イオン注入、エッチング及び不動態化工程が含まれている。さらに、ICチップ製造における、これらの工程のそれぞれは、化学蒸着チャンバ、イオン注入チャンバ又はエッチング機械のような異なる処理機械によってなされているのが通常である。したがって、例えば半導体ウエファのようなWIPパーツ類は、一般的には、多数回にわたり異なるワークステーション及び/又は処理機械の間を行き来され、ICチップ製造に必要な各種の処理工程を経るようになっている。
【0003】
ICチップ類製造の在来のAMHSは、半導体ウエファを貯蔵する複数のWIP貯蔵ユニット(“ストッカー”としても知られている)及びICチップ製造工場の床に設置された各種のワークステーション及び処理機械にウエファー類を搬送する一つ又は複数のオーバーヘッドホイスト搬送車を備えている。WIPストッカーに貯蔵された半導体ウエファーは、通常、複数のフロント・オープニング・ユニファイド・ポッド(以下、FOUPsという)のような複数のカセットポッドに入れられ、引き続いて、吊り下げられたトラックにそって走行するオーバーヘッドホイスト搬送車へ移される。在来のAMHSにおいては、各ストッカーには、複数のアクティブ・インプット/アウトプットポートが備えられているのが一般的であって、これらポートは、内部のロボットアーム(3本又はそれ以上の可動軸をもつ)と関連して前記FOUPsを前記ストッカーへ移し入れたり、移し出したりするようになっている。前記FOUPsは、前記オーバーヘッドホイスト搬送車により前記インプット/アウトプットポートから引き上げられたり、置かれたりする。
【発明の概要】
【発明が解決しようとする課題】
【0004】
在来のAMHSの一つの欠点は、前記ロボットアームが前記WIPストッカーの複数のアクティブ・インプット/アウトプットポートにある前記FOUPsに近づくのに必要な時間により前記システム全体の効率に限界がある点である。半導体ウエファーの一般的にデリケートな品質のために、前記ロボットアームを加速させるには、厳格な制約があるのが通常である。この理由により、前記FOUPsを前記ストッカーの複数のインプット/アウトプットポートへ接近させたり、離去させたりするための時間は、最短のものが要求されるのが通常である。この最短の移動時間は、大まかに言えば、前記ストッカーのスループットを決定し、所望のICチップ製造レベルを保つに必要なストッカーの数に相当し、したがって、前記AMHSの全体のコストに影響してしまう。前記AMHSのマテリアル取扱効率は、各ストッカーにおけるアクティブ・インプット/アウトプットポートの数を増やし、オーバーヘッドホイスト搬送車が同時に多数のインプット/アウトプット・ポートに達するようにすることで向上されるが、インプット/アウトプット・ポートを増やすと、ストッカーのコストが大幅に高くなってしまう。
【0005】
さらに、前記ストッカーにおける、それぞれが1〜3軸の運動をする3軸またはそれ以上の軸運動の内部ロボットをいくつかのインプット/アウトプットポートに組み合わせることは、代表的なストッカーは、5乃至16の軸運動をすることになる。これは、マテリアルの貯蔵には、極めて複雑で、信頼性に劣り、コスト高になる解決策になる。
【0006】
したがって,マテリアルの取扱効率を向上させる一方、在来のマテリアル自動化取扱システムの欠点を打破した マテリアル自動化取扱システムの実現が要望されている。
【0007】
この発明によれば、高能率のマテリアル自動化取扱システム(AMHS)が提供され、これによって、仕掛品(ワーク−イン−プロセス)(WIPと略記)パーツ類を前記システムに含まれている一つ又はそれ以上のWIP貯蔵ユニットへの出し入れが行えるようになる。
【課題を解決するための手段】
【0008】
一つの実施例においては、改良されたAMHSは、オーバーヘッドホイスト搬送サブシステム及び複数の貯蔵容器を含む少なくとも一つの縦型回転コンベヤWIP貯蔵ユニット(“ストッカー”)を備えている。このオーバーヘッドホイスト搬送サブシステムは、少なくとも一つの所定のルートがきめられている架設のトラック(軌道)にそって走行するオーバーヘッドホイスト搬送車を含む。この所定のルートは、前記縦型回転コンベヤストッカーの上を通り、オーバーヘッドホイストが回転コンベヤの貯蔵容器の選ばれた一つから一つ又はそれ以上のWIPパーツ類に直にアクセスできるようになっている。この第1の実施例においては、所望のWIPロットを入れた選ばれた回転コンベヤの貯蔵容器は、架設トラックの実質的直下の縦型回転コンベヤストッカーの頂部に位置するようにされる。ついで、オーバーヘッドホイスト搬送車は、架設のトラックにそって、選ばれた回転コンベヤの貯蔵容器の実質的な直上に動かされる。ついで、このオーバーヘッドホイストを選ばれた貯蔵容器に向けて下降させる。最後に、前記オーバーヘッドホイストを操作して、前記回転コンベヤの貯蔵容器から直に所望のWIPロットを取り上げたり、又は、前記回転コンベヤの貯蔵容器内へ一つ又は複数の所望のWIPロットを納める。
【0009】
第2の実施例においては、架設トラックの所定のルートは、縦型回転コンベヤWIPストッカーに対し平行に走っており、これによって前記オーバーヘッドホイストが前記回転コンベヤの貯蔵容器の一つから一つ又はそれ以上のWIPパーツにアクセスできるようになっている。さらに前記AMHSは、引き出し機構を備え、これは、縦型回転コンベヤストッカーと共に作用して所望のWIPロットを含む選ばれた回転コンベヤの貯蔵容器を前記トラックに対する適当な位置に位置させる。例えば、前記引き出し機構は、単一のサーボ制御軸にそって、前記トラックに近接の第1の位置から前記トラックの実質的な直下の第2の位置へ前記回転コンベヤの貯蔵容器(例えば、可動の棚)を動かすようになっている。この第2の実施例においては、前記オーバーヘッドホイスト搬送車は、前記トラックにそって動かされて、前記第2の位置の実質的な直上位置へ動かされる。ついで、前記オーバーヘッドホイストは、第2の位置へ下降される。別の実施例においては、前記選ばれた回転コンベヤの貯蔵容器は、前記トラックにそって位置する棚を備え、前記オーバーヘッドホイストは、移動ステージに取り付けられて、前記オーバーヘッドホイスト搬送車の側面にある前記棚から一つ又はそれ以上のWIPロットを取り上げたり、配置したりするようになっている。最後に、前記オーバーヘッドホイストを操作して、前記選ばれた貯蔵容器から所望のWIPロットを取り上げたり、又は、前記選ばれた貯蔵容器内へ一つ又はそれ以上のWIPロットを納めるようにする。
【0010】
前記AMHSにより前記オーバーヘッドホイストで前記それぞれの貯蔵容器の上方位置で前記回転コンベヤの貯蔵容器から所望のWIPロットを取り上げたり、前記回転コンベヤの貯蔵容器内へ一つ又はそれ以上のWIPロットを納めることで、より効率がよいAMHS操作が達成できる。
【0011】
この発明のその他の特徴、機能及びアスペクツは、以下の発明の詳細な記述から明らかになる。
【図面の簡単な説明】
【0012】
【図1】在来のマテリアル自動化取扱システムの斜視図。
【図2】この発明によるマテリアル自動化取扱システムの第1の実施例の略図。
【図3】図2のマテリアル自動化取扱システムの第2の実施例の略図。
【図4】図2のマテリアル自動化取扱システムの第3の実施例の略図。
【図5a】この発明による固定貯蔵位置にアクセスするオーバーヘッドホイスト搬送車の略図。
【図5b】この発明による固定貯蔵位置にアクセスするオーバーヘッドホイスト搬送車の略図。
【図6】コンベヤにあるマテリアルにアクセスする図5a〜図5bのオーバーヘッドホイスト搬送車の略図。
【図7】図2のマテリアル自動化取扱システムの操作方法のフローダイアグラム。
【発明を実施するための形態】
【0013】
この出願は、縦型輪状コンベヤ及びオーバーヘッド(頭上)ホイストを組み合わせたものを基にした半導体製造のためのマテリアルの自動化取扱システムと題する2002年6月19日出願の米国仮特許出願第60/389,993号及び移動棚又は移動ホイストプラットフォームを用いるオフセット・ゼロ・フットプリント・ストレージ(ZFS)と題する2002年10月11日出願の米国仮特許出願第60/417,993号をここに参考文献として、この明細書に組み入れるものとする。
【0014】
記載されたマテリアル自動化取扱システム(以下AMHSという)は、仕掛品(以下WIPという)パーツ類を効率よくWIPストレージユニットに出し入れできるようになっている。ここに記載のAMHSは、WIPストレージユニットの縦型輪状コンベヤにおける貯蔵容器の上部からの出し入れを、それぞれの貯蔵容器の上に位置したオーバーヘッドホイストにより行うことでマテリアルの取扱効率を向上するようにしたものである。
【0015】
図1は、在来のAMHS100を示すもので、製品製造環境、例えば、集積回路(IC)チップ類製造のためのクリーン環境のもとでWIPパーツ類を種々のワークステーション及び/又は処理マシン類へ自動的に貯蔵し、搬送するために使用されるものである。図1に示すように、在来のAMHS100は、WIPストレージユニット(“ストッカー”)102とオーバーヘッドホイスト搬送システム104を備えている。WIPストッカー102は、インプットポート111とアウトプットポート112を含み、オーバーヘッドホイスト搬送システム104は、架設されたトラック108と、このトラック108にそって動くオーバーヘッドホイスト搬送車105と106を含む。通常の運転モードにおいては、WIPパーツ類は、フロント・オープニング・ユニファイド・ポッド(以下FOUPという)のようなカセットポッド110に入れられて搬送される。第1番目のオーバーヘッドホイスト搬送車105は、トラック108にそって動き、FOUP110をストッカー102のインプットポート111におろしたり、アウトプットポート112から別のFOUPを引き上げたりするための適当な位置で停まるようになっている。さらに、第2番目のオーバーヘッドホイスト搬送車106は、第1番目のオーバーヘッドホイスト搬送車105が前記FOUPの積み卸しが終って出発進行するまで、トラック108に待機している。
【0016】
在来のAMHS100においては、前記FOUPは、オーバーヘッドホイストからインプットポート111へおろされ、アウトプットポート112からオーバーヘッドホイストへ引き上げるようになっているか、又は、別にストッカー102内から3軸又はそれ以上の軸の動きをするようになっているロボットアーム107が接近するようになっている。さらに、ストッカー102から前記FOUPへ接近するのに必要な最短時間でストッカーのスループットが決まるのが通常であるからストッカーの数が所望の生産レベルを保つのに必要になる。したがって、前記FOUPへアクセスするための多軸ロボットアーム107の複雑な動きで最短時間が長くなってしまい、これによって、AMHS100に必要なストッカーの数とマテリアル取扱システムの全体のコストの両者を高めてしまう。
【0017】
図2は、この発明によるマテリアル自動化取扱システムの図解実施例である。この図解実施例においては、AMHS200は、オーバーヘッド搬送システム204及び少なくとも1基の縦型輪状コンベヤWIPストレージユニット(“ストッカー”)202を備えており、後者は、コンベヤ貯蔵容器203のような複数の貯蔵容器を含んでいる。前記縦型コンベヤWIPストッカー202は、オーバーヘッド搬送システム204におけるオーバーヘッドホイストが前記コンベヤ貯蔵容器の選ばれた一つの容器からWIPパーツ類を直接取り上げるようになっている。
【0018】
注目すべきは、在来のAMHS100と同様に、図2のAMHSは、200mm又は300mmFABプラントのようなICチップ類の製造のためのクリーンな環境又は他の適当な製品製造環境のもとで使用されるようになっている。図2に示すように、ICチップ類製造環境は、第1のフロアー220と第2のフロアー226及び天井214を含んでいる。第1のフロアー220は、補強コンクリートから作られた格子状スラブを備え、第2のフロアー226は、前記格子状スラブ220の上にある高くなっているフロアーを備えている。縦型コンベヤストッカー202は、格子状スラブ220に設置されている。さらに、ICチップ類を製造するための種々の処理加工工程を行うようになっているワークステーション及び/又は処理加工マシン類(図示せず)が高くなっているフロアー226に設置されており、これらは、不導体のマテリアルでカバーされ、特定の負荷及び地震に耐えるようになっている。例えば、高くされているフロアー226は、格子状スラブ220から距離228(約0.6m)高さ寸法になっており、距離224(約4.15m以上または同等)をもって天井214から離れている。
【0019】
ここに示す実施例においては、縦型コンベヤストッカー202は、ハウジング252を含み、このハウジング252内に第1プーリー250、第2プーリー251及びベルト254が配置されている。図2に示すように、複数のコンベヤ貯蔵容器(例えば、貯蔵容器203)は、前記ベルトにそって種々の間隔をおいてベルト254に取り付けられており、ベルト254は、第1と第2のプーリー250,251にかけわたされて、前記複数の貯蔵容器が前記プーリー250,251に一方を駆動することで前記ベルトの経路にそってぐるぐる回転するようになっている。例えば、縦型コンベヤストッカー202は、高さ(約3.85m)をもっている。縦型コンベヤストッカー202は、したがって、高くなっているフロアー226から距離216(3.25m)の高さになっている。
【0020】
上記のように、縦型コンベヤストッカー202は、オーバーヘッドホイストが前記コンベヤ貯蔵容器の一つから直接に半導体ウエハーのようなWIPパーツ類に達することができるようになっている。図解の実施例においては、天井214近くのストッカーハウジング252の部分は、少なくとも部分的に開放されていて、選ばれたコンベヤ貯蔵容器から又はコンベヤ貯蔵容器への出し入れが可能になっている。さらに、各コンベヤ貯蔵容器は、固定の棚を備え、半導体ウエハーは、棚203に配置のフロント・オープン・ユニファイド・ポッド(FOUP)210のようなカセットポッド類へ置かれるようになっている。例えば、各FOUPは、一つ又は複数の半導体ウエファー・ロットを保持し、これによって、オーバーヘッドホイストは、単独のコンベヤ貯蔵容器における多数のウエファー・ロットに同時にアクセスできる。
【0021】
前記オーバーヘッド搬送システム204には、架設されたトラック208と、このトラック208にそって走行する少なくとも一つのオーバーヘッドホイスト搬送車205が含まれている。架設のトラック208は、縦型コンベヤストッカー202の上を通る少なくとも一つの所定のルートをもち、これによって、オーバーヘッドホイスト搬送車205がストッカー202の頂部にほぼ位置するコンベヤ貯蔵容器の一つにおけるFOUPへ直接にアクセスできる。例えば、オーバーヘッドホイスト搬送車205は、天井214から距離222(約0.9m)離れている。
【0022】
図解した操作モードにおいては、FOUP210を入れた貯蔵容器203のような選ばれた貯蔵容器がトラック208の下方にある縦型コンベヤストッカー202の頂部にほぼ位置している。ついでオーバーヘッドホイスト搬送車205がトラック208にそって走行し、貯蔵容器203の実質的な直上位置に到達する。つぎに、オーバーヘッドホイストがオーバーヘッドホイスト搬送車205から降下し、ストッカーハウジング252の開口を通り、貯蔵容器203へ向かう。例えば、オーバーヘッドホイストは、ストッカーの長さ方向軸L1 に平行な方向にそって下げられる。ついで、オーバーヘッドホイストは、IC製造フロアーにあるワークステーション又は処理加工マシンへと運ぶために、貯蔵容器203からFOUP210を直接掴み上げる。理解されるべき点は、このオーバーヘッドホイストは、コンベヤ貯蔵容器203内にFOUPを入れることもできる点である。
【0023】
図3は、AMHS200(図2参照)の別の実施例300を示す。図3に示すように、AMHS300は、オーバーヘッド搬送システム304及び少なくとも一つの縦型コンベヤWIPストッカー302を備えており、このストッカーは、スライド可能に設置された貯蔵容器332のような複数の貯蔵容器を含む。縦型コンベヤストッカー202のように、縦型コンベヤストッカー302は、オーバーヘッド搬送システム304内のオーバーヘッドホイストがコンベヤ貯蔵容器の選ばれた一つにおける例えば半導体ウエファーのようなWIPパーツ類に対し直接アクセスできるようになっている。
【0024】
特には、AMHS300は、天井314、格子状スラブ320及び格子状スラブ320の上に位置する持ち上げられたフロアー326を含むICチップ製造環境において使用される。図3に示すように、高くなったフロアー326は、格子状スラブ320から距離328(約0.6m)をおいており、天井314から距離324(約5.4m以上)をおいている。さらに、縦型コンベヤストッカー302は、ハウジング352、ハウジング352内に配置の第1プーリー350、第2プーリー351、ベルト354を含んでいる。コンベヤ貯蔵容器(例えば、スライド可能に設置の貯蔵容器332)は、前記ベルト354に種々の間隔をおいて取り付けられており、ベルト354は、第1と第2のプーリー350,351にかけわたされて、該プーリー350,351の一方を駆動することで、前記複数の貯蔵容器がベルト経路にそってぐるぐる回転するようになっている。例えば、縦型回転ストッカー302は、高さ318(約6m)になっている。
【0025】
上記のように、縦型コンベヤストッカー302は、オーバーヘッドホイストがコンベヤ貯蔵容器の一つにおける半導体ウエファーに対し直接アクセスできるようになっている。図示の実施例では、ハウジング352の少なくとも一方の側面の少なくとも一部が開放されていて、選ばれたコンベヤ貯蔵容器がハウジング352内から引き出され、ついで、選ばれた貯蔵容器がオーバーヘッドホイストにより引き上げられたり、降ろされたりするようになっている。特に、AMHS300は、さらに、少なくとも一つの引き出し機構330を含み、この機構は、複数の半導体ウエファーをストッカー302から引き出し、オーバーヘッド搬送システム304に含まれている架設のトラック308に対し前記マテリアルを適切に配置する操作を行うようになっている。注目すべきは、各貯蔵容器は、可動棚又は固定棚を備えている点である。さらに、複数の半導体ウエファーは、棚332に配置されるFOUP310のようにカセットポッドに置かれる。
【0026】
オーバーヘッド搬送システム304は、架設のトラック308と、トラック308にそって走行するオーバーヘッドホイスト搬送車305とを含む。トラック308は、縦型コンベヤストッカ302と平行な少なくとも一つの所定の経路を持ち、これによって、オーバーヘッドホイスト搬送車305がスライド可能に設置の貯蔵容器の選ばれた一つにおけるFOUPに直接アクセスすることができるようになっている。
【0027】
図解の操作モードにおいては、FOUP310を入れた貯蔵容器332などのような選ばれたスライド可能な貯蔵容器は、前記引き出し機構330がストッカー330内から貯蔵容器332を引き出すことができる位置におかれ、貯蔵容器332は、トラック308の直下におかれる。注目すべき点は、引き出し機構330がストッカー302に組み込まれていて、貯蔵容器332が単一のサーボ制御軸398にそって動くようになっている点である。ついでオーバーヘッドホイスト搬送車305がトラック308にそって動き、引き出された貯蔵容器332の真上に来るようになっている。ついで、オーバーヘッドホイストがオーバーヘッドホイスト搬送車305から貯蔵容器332に向け、例えば、前記ストッカーの長さ方向軸と平行になって降下してくる。オーバーヘッドホイストは、ついで、貯蔵容器332からFOUP310を直接に取り出し、ICチップ製造フロアーにあるワークステーション又は処理加工マシンへ搬送するようになっている。理解すべきは、オーバーヘッドホイストは、回転コンベヤの貯蔵容器332へFOUPを入れる操作も行う点である。
【0028】
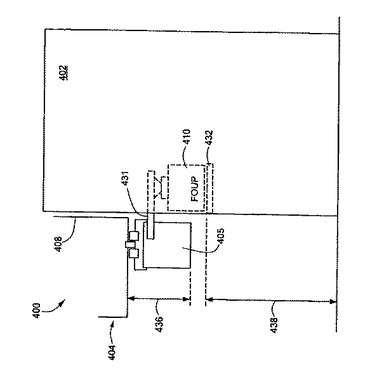
図4は、AMHS300(図3参照)の詳細な実施態様を示す。図示の実施例では、AMHS400は、オーバーヘッドホイスト搬送システム404と縦型回転コンベヤストッカー402を備えている。このオーバーヘッドホイスト搬送システム404には、架設されたトラック408と、トラック408にそって走行するオーバーヘッドホイスト搬送車405とが含まれている。例えば、オーバーヘッドホイスト搬送車405は、トラック408から距離436(約0.9m)をおいている。縦型回転コンベヤストッカー402は、ストッカーハウジング内に配置の貯蔵容器432のような複数の回転コンベヤ貯蔵容器を含む。例えば、貯蔵容器432は、一段高くなっているICチップ製造フロアーから距離438(約2.6m)だけ離れている。
【0029】
上記のように、FOUP410は、ストッカーハウジング内から引き出されて、選ばれた貯蔵容器へと移し入れられたり、移し出されたりするようになっている。オーバーヘッドホイスト搬送車405は、さらに、オーバーヘッドホイスト431を含み、このホイストは、FOUP410を貯蔵容器432へ上方から出し入れするためのグリッパー(把持部)を有している。好ましい実施例においては、このホイストグリッパー430は、移動ステージに取り付けられていて、オーバーヘッドホイストでオーバーヘッドホイスト搬送車405のいずれかの側面からカセットポッドを取り上げたり、該側面に配置したりするようになっている。
【0030】
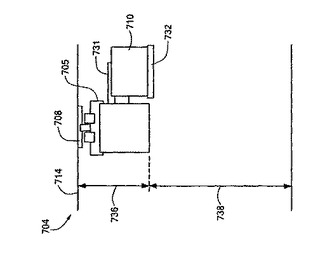
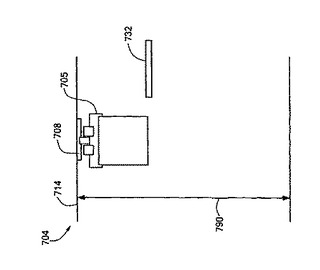
図5a〜図5bは、固定の貯蔵位置へアクセスするオーバーヘッドホイスト搬送車サブシステム704を示す。図示の実施例では、オーバーヘッドホイスト搬送車サブシステム704は、架設トラック708及びこのトラックにそって走行するオーバーヘッドホイスト搬送車705を含む。このオーバーヘッドホイスト搬送車705でFOUP710を固定の貯蔵位置732から取り上げたり、配置したりするようになっている。例えば、オーバーヘッドホイスト搬送車705は、天井714から距離736(約0.9m)だけ離れており、貯蔵位置732は、ICチップ製造フロアーから距離738(約2.6m)をおいた上方にある。さらに、天井714は、高くなっているフロアーから距離790(約3.66m)離れた上にある。
【0031】
オーバーヘッドホイスト搬送車705は、架設のトラック708の直下になる位置からFOUP710を取り上げ(そして配置する)。この目的のために、オーバーヘッドホイスト搬送車705は、移動ステージに取り付けられ且つ搬送車705から突き出てFOUP710を取り上げ、さらに、これを搬送車705へ引き戻すホイストグリッパー731を備え、このようにしてFOUP710をオーバーヘッドホイスト搬送車705内で移動させるようになっている(図5b参照)。好ましい実施例では、前記移動ステージによりオーバーヘッドホイストでカセットポッドをオーバーヘッドホイスト搬送車705のいずれかの側面から取り上げたり、配置したりするようになっている。FOUP710がホイストグリッパー730に保持されると、オーバーヘッドホイスト搬送車705がそれをINチップ製造フロアーのワークステーション又は処理加工マシンへと運ぶ。
【0032】
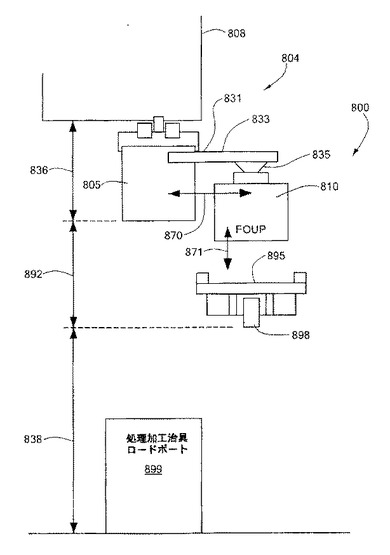
図6は、コンベヤ895の上にあるか又は移動中のマテリアルにアクセスするオーバーヘッドホイスト搬送車システム800を図示する。特には、オーバーヘッドホイスト搬送サブシステム804を用いて、FOUP810をオーバーヘッドレールをベースとするコンベヤ895から直接取り上げたり、配置したりするようになっている。図示の実施例では、オーバーヘッドホイスト搬送サブシステム804は、架設されたトラック808と、トラック808にそって走行するオーバーヘッドホイスト搬送車805を含んでいる。例えば、オーバーヘッドホイスト搬送車805は、トラック808から距離836(約0.9m)をおいた下方にあり、レールにのったコンベヤ895から距離892(約0.35m)をおいた上方に位置する。さらに、オーバーヘッドレール898は、高くなっているICチップ製造フロアーから距離838(約2.6m)をおいた上方に位置する。理解されるべき点は、レール898は、図面の面に対し垂直方向にある点である。オーバーヘッドホイスト搬送車システム800は、さらに、処理加工治具ロードポート899を含んでいる。
【0033】
オーバーヘッドホイスト搬送車805を用いて、レールに乗せられたコンベヤ895への上方からの積み卸しを行うようになっている。この目的のために、オーバーヘッドホイスト搬送車805には、ホイストグリッパー835をもつオーバーヘッドホイスト831が含まれていて、これは、移動ステージ833に取り付けられ、これは、矢印870,871それぞれに示すように、水平及び垂直移動できるようになっている。図示の操作モードにおいては、レールに乗っているコンベヤ895が動いてFOUP810をオーバーヘッドホイスト831の直下に位置させる。ついで、移動ステージ833を介してホイストグリッパー835がFOUP810に向けて降下し、コンベヤ895からFOUP810を直接掴み上げる。ついで、FOUP810を保持しているホイストグリッパー835を移動ステージ833を介して引き上げて後退させ、このようにしてFOUP810をオーバーヘッドホイスト搬送車805内へ移動させる。ついで搬送車805でFOUP810をICチップ製造フロアーのワークステーション又は処理加工マシンへ運ぶ。
【0034】
ここに記載のマテリアル自動化取扱システムの操作方法を図7を参照しながら解説する。工程902で示すように、FOUPを入れた選ばれた貯蔵容器は、縦型回転コンベヤストッカー内に配置され、オーバーヘッドホイストがアクセスできるようにされる。例えば、選ばれた回転コンベヤの貯蔵容器は、縦型回転コンベヤストッカーの頂部又は側部に位置される(図2〜図3参照)。ついで、工程904で示すように、オーバーヘッドホイスト搬送車をトラックにそって動かし,選ばれた貯蔵容器の近くへと移動させる。選ばれた貯蔵容器を前記ストッカーの頂部に位置させる場合には、オーバーヘッドホイスト搬送車は、前記貯蔵容器の直上に位置することになる。選ばれた貯蔵容器を前記ストッカーの側面に位置させる場合には、オーバーヘッドホイスト搬送車は、前記貯蔵容器の側面に位置することになる。ついで工程906で示すようにオーバーヘッドホイストを前記搬送車から突き出して降下させ、前記ホイストグリッパーを選ばれた貯蔵容器内のFOUPに当接させる。ついで、工程908で示すように、ホイストグリッパーを操作して、前記貯蔵容器からFOUPを直に取り上げる。ついで、工程910で示すように、オーバーヘッドホイストを引き上げ、後退させ、FOUPをオーバーヘッドホイスト搬送車内へ移す。このようにして、FOUPは、選ばれた貯蔵容器からオーバーヘッドホイスト搬送車へ移される。最後に、工程912で示すように、オーバーヘッドホイスト搬送車でFOUPを製品製造フロアーにおけるワークステーション又は処理加工マシンへ運ぶ。
【0035】
当業者によれば、上記のマテリアル自動化取扱システムのモディフィケーション及び改変が、ここに記載の発明の概念から逸脱することなしに行われる点を理解すべきである。したがって、この発明は、添付の請求の範囲の範囲と精神による点を別として限定して解釈されるべきではない。
【符号の説明】
【0036】
200 AMHS
202 ストッカー
203 貯蔵容器
204 オーバーヘッドホイスト搬送システム
205 搬送車
208 トラック
210 FOUP
214 天井
220 第1のフロアー
226 第2のフロアー
250 第1のプーリー
251 第2のプーリー
252 ストッカーハウジング
254 ベルト
【特許請求の範囲】
【請求項1】
自動化されたマテリアル取扱システムであって、
複数の貯蔵容器を含み、各貯蔵容器は、少なくともマテリアルの1ユニットを保持するようになっている少なくとも一つの貯蔵ユニット;及び
少なくとも一つのオーバーヘッドホイストを含み、このオーバーヘッドホイストは、所定の位置へ搬送するために複数の貯蔵容器の選ばれた一つにおける少なくとも一つのマテリアル・ユニットに直接にアクセスできるオーバーヘッドホイスト搬送サブシステム。
【請求項2】
できるオーバーヘッドホイストが貯蔵ユニット内に貯蔵するために選ばれた貯蔵容器へ少なくとも一つのマテリアル・ユニットを直接に配置するようになっている請求項1のシステム。
【請求項3】
前記選ばれたマテリアル・ユニットは、前記貯蔵ユニットの外部へ動かすことで前記オーバーヘッドホイストへ向け直接に動かすようになっている請求項1のシステム。
【請求項4】
前記貯蔵ユニットは、さらに、少なくとも一つの軸方向に前記マテリアル・ユニットを動かす機構を含む請求項3のシステム。
【請求項5】
前記選ばれた貯蔵容器は、前記貯蔵ユニット内に配置の固定棚を備える請求項1のシステム。
【請求項6】
前記オーバーヘッド搬送サブシステムは、前記オーバーヘッドホイストに結合した移動ステージを含み、この移動ステージは、オーバーヘッドホイストを第1の位置へ動かして前記固定棚の少なくとも一つのマテリアル・ユニットにアクセスできるようになっている請求項5のシステム。
【請求項7】
前記移動ステージは、さらに、前記オーバーヘッドホイストを第2の位置へ動かして、該ホイストで前記貯蔵ユニットから少なくとも一つのマテリアル・ユニットを取り出すようになっている請求項6のシステム。
【請求項8】
前記少なくとも一つの貯蔵ユニットは、縦型回転コンベヤストッカーを備えている請求項1のシステム。
【請求項9】
前記縦型回転コンベヤストッカーは、選ばれた貯蔵容器を前記ストッカーの上位領域へ動かし、これによって前記オーバーヘッドホイストが前記選ばれた貯蔵容器の上位にある位置から少なくとも一つのマテリアル・ユニットにアクセスできるようになっている請求項8のシステム。
【請求項10】
前記オーバーヘッドホイスト搬送サブシステムは、さらに、トラックと前記オーバーヘッドホイストを前記トラックにそって搬送する搬送車を含み、前記トラックの少なくとも一部は、前記ストッカーの上位領域において、前記選ばれた貯蔵容器の実質的な直上に位置するようになる請求項9のシステム。
【請求項11】
前記縦型回転コンベヤストッカーは、選ばれた貯蔵容器を前記ストッカーの一方の側面に沿う第1の位置へ動かして、前記オーバーヘッドホイストが前記選ばれた貯蔵容器にそう第2の位置から少なくとも一つのマテリアル・ユニットにアクセスできるようになっている請求項8のシステム。
【請求項12】
前記オーバーヘッドホイスト搬送サブシステムは、さらに、トラックと前記オーバーヘッドホイストを前記トラックにそって搬送する搬送車を含み、前記トラックの少なくとも一部は、前記ストッカーにそう前記第1の位置に近接の前記ストッカーの長さ方向軸と実質的に平行に配置されている請求項11のシステム。
【請求項13】
前記オーバーヘッドホイストは、前記少なくとも一つのマテリアル・ユニットを保持することができるグリッパー部を含む請求項1のシステム。
【請求項14】
前記マテリアル・ユニットは、カセットポッドを備える請求項1のシステム。
【請求項15】
以下の工程を備えるマテリル自動化取扱システムの操作方法:
マテリアル貯蔵ユニット内にある複数の貯蔵容器の選ばれた一つによりマテリアルの少なくとも一つのユニットを保持し;
オーバーヘッドホイスト搬送サブシステムに含まれているオーバーヘッドホイストにより選ばれた貯蔵容器から直接に少なくとも一つのマテリアル・ユニットへアクセスし;そして
前記少なくとも一つのマテリアル・ユニットをオーバーヘッドホイスト搬送サブシステムにより所定の位置へ搬送すること。
【請求項16】
前記貯蔵ユニット内へ続いて貯蔵するために、前記選ばれた貯蔵容器へ直にオーバーヘッドホイストにより前記少なくとも一つのマテリアル・ユニットを提供する工程をさらに含む請求項15の方法。
【請求項17】
前記選ばれた貯蔵容器により前記オーバーヘッドホイストへ直に前記少なくとも一つのマテリアル・ユニットを提供する工程をさらに含み、前記選ばれた貯蔵容器は、可動の棚を備えている請求項15の方法。
【請求項18】
前記貯蔵ユニットに含まれている機構により、少なくとも一つの軸方向に前記棚を動かす工程をさらに含む請求項17の方法。
【請求項19】
移動ステージにより前記オーバーヘッドホイストを第1の位置へ動かして前記ホイストが前記選ばれた貯蔵容器から直に少なくとも一つのマテリアル・ユニットにアクセスする工程をさらに含み、前記選ばれた貯蔵容器は、固定の棚を備えている請求項15の方法。
【請求項20】
前記オーバーヘッドホイストを前記移動ステージにより第2の位置へ動かして、前記ホイストが前記貯蔵ユニットから前記少なくとも一つのマテリアル・ユニットを取り出せるようにした工程をさらに含む請求項19の方法。
【請求項21】
前記選ばれた貯蔵容器を前記貯蔵ユニットに含まれている回転コンベヤ機構により前記貯蔵ユニットの上位領域へ動かし、これによって前記オーバーヘッドホイストが前記選ばれた貯蔵容器の上方位置から前記少なくとも一つのマテリアル・ユニットにアクセスできるようになる工程をさらに含む請求項15の方法。
【請求項22】
トラックに沿って走行する搬送車、オーバーヘッドホイストで搬送される搬送車及び前記オーバーヘッドホイスト搬送サブシステムに含まれているトラックにより前記オーバーヘッドホイストを動かす工程をさらに含み、前記トラックの少なくとも一部が前記貯蔵ユニットの上位領域にある前記選ばれた貯蔵容器の実質的な直上位置に位置するようになっている請求項21の方法。
【請求項23】
前記選ばれた貯蔵容器を前記貯蔵ユニットに含まれている回転コンベヤ機構により前記貯蔵ユニットの側面にそって第1の位置へ動かし、これによって前記オーバーヘッドホイストが前記選ばれた貯蔵容器にそう第2の位置から前記少なくとも一つのマテリアル・ユニットにアクセスできるようになる工程をさらに含む請求項15の方法。
【請求項24】
トラックにそって走行する搬送車、オーバーホイストが搬送する搬送車及び前記オーバーヘッドホイスト搬送サブシステムに含まれているトラックにより前記オーバーヘッドホイストを動かす工程をさらに含み、前記トラックの少なくとも一部が前記貯蔵ユニットの側面に沿う第1の位置に近接して前記貯蔵容器と実質的に平行に位置するようになっている請求項23の方法。
【請求項25】
前記オーバーヘッドホイストのグリッパー部により前記少なくとも一つのマテリアル・ユニットをグリップする工程をさらに含む請求項15の方法。
【請求項26】
前記オーバーヘッドホイストのグリッパー部により前記少なくとも一つのマテリアル・ユニットをグリップする工程をさらに含み、前記マテリアル・ユニットは、カセットポッドを備えている請求項25の方法。
【請求項1】
自動化されたマテリアル取扱システムであって、
複数の貯蔵容器を含み、各貯蔵容器は、少なくともマテリアルの1ユニットを保持するようになっている少なくとも一つの貯蔵ユニット;及び
少なくとも一つのオーバーヘッドホイストを含み、このオーバーヘッドホイストは、所定の位置へ搬送するために複数の貯蔵容器の選ばれた一つにおける少なくとも一つのマテリアル・ユニットに直接にアクセスできるオーバーヘッドホイスト搬送サブシステム。
【請求項2】
できるオーバーヘッドホイストが貯蔵ユニット内に貯蔵するために選ばれた貯蔵容器へ少なくとも一つのマテリアル・ユニットを直接に配置するようになっている請求項1のシステム。
【請求項3】
前記選ばれたマテリアル・ユニットは、前記貯蔵ユニットの外部へ動かすことで前記オーバーヘッドホイストへ向け直接に動かすようになっている請求項1のシステム。
【請求項4】
前記貯蔵ユニットは、さらに、少なくとも一つの軸方向に前記マテリアル・ユニットを動かす機構を含む請求項3のシステム。
【請求項5】
前記選ばれた貯蔵容器は、前記貯蔵ユニット内に配置の固定棚を備える請求項1のシステム。
【請求項6】
前記オーバーヘッド搬送サブシステムは、前記オーバーヘッドホイストに結合した移動ステージを含み、この移動ステージは、オーバーヘッドホイストを第1の位置へ動かして前記固定棚の少なくとも一つのマテリアル・ユニットにアクセスできるようになっている請求項5のシステム。
【請求項7】
前記移動ステージは、さらに、前記オーバーヘッドホイストを第2の位置へ動かして、該ホイストで前記貯蔵ユニットから少なくとも一つのマテリアル・ユニットを取り出すようになっている請求項6のシステム。
【請求項8】
前記少なくとも一つの貯蔵ユニットは、縦型回転コンベヤストッカーを備えている請求項1のシステム。
【請求項9】
前記縦型回転コンベヤストッカーは、選ばれた貯蔵容器を前記ストッカーの上位領域へ動かし、これによって前記オーバーヘッドホイストが前記選ばれた貯蔵容器の上位にある位置から少なくとも一つのマテリアル・ユニットにアクセスできるようになっている請求項8のシステム。
【請求項10】
前記オーバーヘッドホイスト搬送サブシステムは、さらに、トラックと前記オーバーヘッドホイストを前記トラックにそって搬送する搬送車を含み、前記トラックの少なくとも一部は、前記ストッカーの上位領域において、前記選ばれた貯蔵容器の実質的な直上に位置するようになる請求項9のシステム。
【請求項11】
前記縦型回転コンベヤストッカーは、選ばれた貯蔵容器を前記ストッカーの一方の側面に沿う第1の位置へ動かして、前記オーバーヘッドホイストが前記選ばれた貯蔵容器にそう第2の位置から少なくとも一つのマテリアル・ユニットにアクセスできるようになっている請求項8のシステム。
【請求項12】
前記オーバーヘッドホイスト搬送サブシステムは、さらに、トラックと前記オーバーヘッドホイストを前記トラックにそって搬送する搬送車を含み、前記トラックの少なくとも一部は、前記ストッカーにそう前記第1の位置に近接の前記ストッカーの長さ方向軸と実質的に平行に配置されている請求項11のシステム。
【請求項13】
前記オーバーヘッドホイストは、前記少なくとも一つのマテリアル・ユニットを保持することができるグリッパー部を含む請求項1のシステム。
【請求項14】
前記マテリアル・ユニットは、カセットポッドを備える請求項1のシステム。
【請求項15】
以下の工程を備えるマテリル自動化取扱システムの操作方法:
マテリアル貯蔵ユニット内にある複数の貯蔵容器の選ばれた一つによりマテリアルの少なくとも一つのユニットを保持し;
オーバーヘッドホイスト搬送サブシステムに含まれているオーバーヘッドホイストにより選ばれた貯蔵容器から直接に少なくとも一つのマテリアル・ユニットへアクセスし;そして
前記少なくとも一つのマテリアル・ユニットをオーバーヘッドホイスト搬送サブシステムにより所定の位置へ搬送すること。
【請求項16】
前記貯蔵ユニット内へ続いて貯蔵するために、前記選ばれた貯蔵容器へ直にオーバーヘッドホイストにより前記少なくとも一つのマテリアル・ユニットを提供する工程をさらに含む請求項15の方法。
【請求項17】
前記選ばれた貯蔵容器により前記オーバーヘッドホイストへ直に前記少なくとも一つのマテリアル・ユニットを提供する工程をさらに含み、前記選ばれた貯蔵容器は、可動の棚を備えている請求項15の方法。
【請求項18】
前記貯蔵ユニットに含まれている機構により、少なくとも一つの軸方向に前記棚を動かす工程をさらに含む請求項17の方法。
【請求項19】
移動ステージにより前記オーバーヘッドホイストを第1の位置へ動かして前記ホイストが前記選ばれた貯蔵容器から直に少なくとも一つのマテリアル・ユニットにアクセスする工程をさらに含み、前記選ばれた貯蔵容器は、固定の棚を備えている請求項15の方法。
【請求項20】
前記オーバーヘッドホイストを前記移動ステージにより第2の位置へ動かして、前記ホイストが前記貯蔵ユニットから前記少なくとも一つのマテリアル・ユニットを取り出せるようにした工程をさらに含む請求項19の方法。
【請求項21】
前記選ばれた貯蔵容器を前記貯蔵ユニットに含まれている回転コンベヤ機構により前記貯蔵ユニットの上位領域へ動かし、これによって前記オーバーヘッドホイストが前記選ばれた貯蔵容器の上方位置から前記少なくとも一つのマテリアル・ユニットにアクセスできるようになる工程をさらに含む請求項15の方法。
【請求項22】
トラックに沿って走行する搬送車、オーバーヘッドホイストで搬送される搬送車及び前記オーバーヘッドホイスト搬送サブシステムに含まれているトラックにより前記オーバーヘッドホイストを動かす工程をさらに含み、前記トラックの少なくとも一部が前記貯蔵ユニットの上位領域にある前記選ばれた貯蔵容器の実質的な直上位置に位置するようになっている請求項21の方法。
【請求項23】
前記選ばれた貯蔵容器を前記貯蔵ユニットに含まれている回転コンベヤ機構により前記貯蔵ユニットの側面にそって第1の位置へ動かし、これによって前記オーバーヘッドホイストが前記選ばれた貯蔵容器にそう第2の位置から前記少なくとも一つのマテリアル・ユニットにアクセスできるようになる工程をさらに含む請求項15の方法。
【請求項24】
トラックにそって走行する搬送車、オーバーホイストが搬送する搬送車及び前記オーバーヘッドホイスト搬送サブシステムに含まれているトラックにより前記オーバーヘッドホイストを動かす工程をさらに含み、前記トラックの少なくとも一部が前記貯蔵ユニットの側面に沿う第1の位置に近接して前記貯蔵容器と実質的に平行に位置するようになっている請求項23の方法。
【請求項25】
前記オーバーヘッドホイストのグリッパー部により前記少なくとも一つのマテリアル・ユニットをグリップする工程をさらに含む請求項15の方法。
【請求項26】
前記オーバーヘッドホイストのグリッパー部により前記少なくとも一つのマテリアル・ユニットをグリップする工程をさらに含み、前記マテリアル・ユニットは、カセットポッドを備えている請求項25の方法。
【図1】


【図2】
【図3】
【図4】
【図5a】
【図5b】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5a】
【図5b】
【図6】
【図7】
【公開番号】特開2013−51447(P2013−51447A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−269548(P2012−269548)
【出願日】平成24年12月10日(2012.12.10)
【分割の表示】特願2011−115010(P2011−115010)の分割
【原出願日】平成15年3月20日(2003.3.20)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成24年12月10日(2012.12.10)
【分割の表示】特願2011−115010(P2011−115010)の分割
【原出願日】平成15年3月20日(2003.3.20)
【出願人】(000006297)村田機械株式会社 (4,916)
【Fターム(参考)】
[ Back to top ]