
マニピュレータの制御装置
【課題】手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータと構造物との衝突回避を図ることができるマニピュレータの制御装置を提供する。
【解決手段】制御装置14は、多数のマニピュレータ分割表面A1〜Amのうちのいずれか1つと多数の構造物分割表面B1〜Bnのうちのいずれか1つとの組合せを所定の件数だけランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、この重心間距離によりマニピュレータ分割表面と構造物分割表面が衝突する可能性の高いものと判定した組合せからなる候補リストを作成する。そして、候補リストの各組合せにおいて仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定し、衝突すると判定した場合に、衝突を回避するように関節の目標回転角を補正する。
【解決手段】制御装置14は、多数のマニピュレータ分割表面A1〜Amのうちのいずれか1つと多数の構造物分割表面B1〜Bnのうちのいずれか1つとの組合せを所定の件数だけランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、この重心間距離によりマニピュレータ分割表面と構造物分割表面が衝突する可能性の高いものと判定した組合せからなる候補リストを作成する。そして、候補リストの各組合せにおいて仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定し、衝突すると判定した場合に、衝突を回避するように関節の目標回転角を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば原子炉内構造物の検査作業や補修作業に用いるマニピュレータに係わり、特に、マニピュレータを駆動制御する制御装置に関する。
【背景技術】
【0002】
従来、原子炉内構造物の検査作業や補修作業を目的とし、原子炉内の狭隘部にてマニピュレータを用いた検査装置が提唱されている(例えば、特許文献1参照)。特許文献1に記載の検査装置では、マニピュレータは5軸の回転機構を備えた多関節型椀機構として構成されており、それらの回転機構が制御装置によって駆動制御されている。そして、原子炉内構造物の探傷検査作業を行う場合は、超音波プローブを備えたスキャナをマニピュレータの手先(先端)に取付け、マニピュレータを操作して超音波プローブを検査対象部位の近傍に配置し、スキャナにより超音波プローブを検査対象部位の表面に接触させつつ走査するようになっている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−3400号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1には記載されていないが、上記制御装置は、例えば、マニピュレータの手先の目標位置姿勢が指示されると、対応する各軸の目標回転角を演算し、この目標回転角となるように回転機構を駆動制御するものと考えられる。また、制御装置は、マニピュレータと構造物との衝突を回避する衝突回避制御を行うことが好ましいと考えられる。この衝突回避制御では、前述のように演算した各軸の目標回転角に基づいてマニピュレータの表面の仮想配置を演算し、この仮想配置のマニピュレータの表面と構造物の表面とが衝突するかどうかを判定し、衝突すると判定した場合に衝突を回避するように各軸の目標回転角を補正し、この補正後の目標回転角となるように回転機構を駆動制御する。ところが、マニピュレータは狭隘部に配置されていることから、マニピュレータと構造物との衝突位置や干渉量を把握するために、マニピュレータの表面及び構造物の表面を小さくとり多数に分割する必要がある。そして、例えば、多数のマニピュレータの分割表面と多数の構造物の分割表面との総当たりの組合せにおいて衝突判定を行うのであれば、その衝突判定に時間がかかってしまう。あるいは、例えば、全てのマニピュレータの分割表面と構造物の分割表面との位置関係から、衝突判定を行うべき組合せを事前に設定するのであれば、その設定に時間がかかってしまう。いずれの場合にしても、マニピュレータの手先の目標位置姿勢を指示してから駆動するまでの制御時間が長くなる。かといって、マニピュレータの表面及び構造物の表面を大きくとり少数に分割すれば、マニピュレータと構造物との衝突位置や干渉量を十分に把握できないため、マニピュレータが構造物に近づけられなくなり、場合によってはマニピュレータが身動きできなくなってしまう。
【0005】
本発明は、上記事柄に鑑みてなされたものであり、マニピュレータの手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータと構造物との衝突回避を図ることができるマニピュレータの制御装置を提供することにある。
【課題を解決するための手段】
【0006】
(1)上記目的を達成するために、本発明は、複数の関節を介し連結された複数のリンクからなるマニピュレータに対し、各関節の回転角を制御することにより手先の位置姿勢を制御する制御装置において、前記マニピュレータに関するデータとして、各リンクの表面及び各関節の表面を多数に分割したマニピュレータ分割表面の形状及びそれらの相対的な位置関係を記憶する第1記憶手段と、前記マニピュレータの周囲の構造物に関するデータとして、前記構造物の表面を多数に分割した構造物分割表面の形状及びそれらの絶対位置を記憶する第2記憶手段と、前記マニピュレータの手元の現在位置姿勢を取得する手元現在位置姿勢取得手段と、前記マニピュレータの手先の目標位置姿勢を入力する手先目標位置姿勢入力手段と、前記手元現在位置姿勢取得手段で取得された手元の現在位置姿勢及び前記手先目標位置姿勢入力手段で入力された手先の目標位置姿勢に基づき、各関節の目標回転角を演算する関節目標回転角演算手段と、前記手元現在位置取得手段で取得された手元の現在位置姿勢、前記関節目標回転角演算手段で演算された各関節の目標回転角、並びに前記第1記憶手段で記憶されたデータに基づき、前記手先の目標位置姿勢に対応する前記多数のマニピュレータ分割表面の仮想配置を演算するマニピュレータ分割表面演算手段と、前記第1記憶手段で記憶された前記多数のマニピュレータ分割表面のうちのいずれか1つと前記第2記憶手段で記憶された前記多数の構造物分割表面のうちのいずれか1つとの組合せを予め設定された所定の件数だけランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける前記仮想配置の前記マニピュレータ分割表面と前記構造物分割表面との重心間距離を演算し、この重心間距離が予め設定された所定の閾値未満であるかどうか判定することにより前記マニピュレータ分割表面と前記構造物分割表面が衝突する可能性の高いものであるかどうかを判定し、衝突する可能性の高いものと判定した組合せからなる候補リストを作成する処理を行うリスト作成手段と、前記リスト作成手段で作成された候補リストの各組合せにおいて前記仮想配置の前記マニピュレータ分割表面と前記構造物分割表面が衝突するかどうかを判定する衝突判定手段と、前記衝突判定手段で前記マニピュレータ分割表面と前記構造物分割表面が衝突すると判定された場合に、衝突を回避するように前記関節の目標回転角を補正する関節目標回転角補正手段とを備える。
【0007】
このように本発明においては、リスト作成手段は、マニピュレータ分割表面と構造物分割表面との組合せをランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、この重心間距離が所定の閾値未満であるかどうか判定することにより衝突の可能性の高いものであるかどうかを判定し、衝突の可能性の高いものと判定した組合せからなる候補リストを作成する。衝突判定手段は、候補リストの各組合せにおいて、仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定する。これにより、マニピュレータと構造物との衝突位置や干渉量を把握するためにマニピュレータ分割表面及び構造物分割表面を小さくとり多数に分割する場合であっても、手先の目標位置姿勢を入力してから駆動するまでの制御時間の短縮を図ることができる。すなわち、例えばマニピュレータ分割表面と構造物分割表面との総当たりの組合せにおいて衝突するかどうかを判定する制御方法と比べ、衝突判定処理時間の短縮を図ることができ、ひいては全体の制御時間の短縮を図ることができる。また、例えば全てのマニピュレータ分割表面と構造物分割表面との位置関係から衝突の可能性の高い組合せからなる候補リストを作成する制御方法と比べ、候補リスト作成処理時間の短縮を図ることができ、ひいては全体の制御時間の短縮を図ることができる。したがって、本発明においては、マニピュレータの手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータと構造物との衝突回避を図ることができる。
【0008】
(2)上記(1)において、好ましくは、前記リスト作成手段は、前記処理を予め設定された所定の時間間隔で繰返し行っており、前記抽出リストを作成する際に前回作成した候補リストの組合せを加える。
【0009】
これにより、例えば手先の目標位置姿勢や現在位置姿勢及び関節の目標回転角や現在回転角などの変化の有無にかかわらず、時間の経過とともに、候補リストにおける組合せの件数、すなわち衝突判定を行う組合せの件数を増加させることができる。その結果、マニピュレータと構造物との衝突回避性を向上させることができる。
【0010】
(3)上記(1)又は(2)において、好ましくは、前記関節目標回転角補正手段は、前記衝突判定手段で衝突すると判定された前記仮想配置の前記マニピュレータ分割表面の頂点のうち最も前記構造物の内側に位置するものを選択し、この選択した頂点と前記構造物分割表面との距離以上の大きさを持ちかつ前記構造物分割表面の法線ベクトルと同じであって前記構造物の外側への向きを持つ衝突回避ベクトルを生成する衝突回避ベクトル生成手段と、前記衝突判定手段で衝突すると判定された前記マニピュレータ分割表面が、前記複数の関節で区分された複数の部位のいずれに含まれるか判別することにより、前記マニピュレータ分割表面に対応する前記衝突回避ベクトルを分類する分類手段と、前記衝突回避ベクトルを前記部位毎に平均化し、この平均化した衝突回避ベクトルに基づいて前記各関節の目標回転角の補正量を演算する関節目標回転角補正量演算手段とを備える。
【0011】
(4)上記(1)〜(3)のいずれか1つにおいて、好ましくは、前記マニピュレータの各関節の現在回転角を取得する関節現在回転角取得手段と、前記手元現在位置姿勢取得手段で取得された手元の現在位置姿勢及び前記関節現在回転角取得手段で取得された各関節の現在回転角に基づき、手先の現在位置姿勢を演算する手先現在位置姿勢演算手段とを備え、前記関節目標回転角演算手段は、前記手先目標位置姿勢入力手段で入力された手先の目標位置姿勢と前記手先現在位置姿勢演算手段で演算された手先の現在位置姿勢との偏差を演算し、この位置姿勢の偏差に基づき各関節の目標回転角と現在回転角との偏差を演算し、この各関節回転角の偏差を前記関節現在回転角取得手段で取得された各関節の現在回転角に加算して各関節の目標回転角を演算する。
【発明の効果】
【0012】
本発明によれば、マニピュレータの手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータと構造物との衝突回避を図ることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態による原子炉内検査装置の機器配置を一例として表す概略図である。
【図2】本発明の一実施形態におけるマニピュレータの全体構造を関連機器とともに表す概略図である。
【図3】本発明の一実施形態におけるマニピュレータを構成する駆動部の詳細構造を表す断面図である。
【図4】本発明の一実施形態におけるマニピュレータの手先位置姿勢制御に係わる制御装置の機能的構成を表すブロック図である。
【図5】本発明の一実施形態におけるマニピュレータの手先位置姿勢制御に係わる制御装置の制御処理内容を表すPAD図である。
【図6】本発明の一実施形態における表示装置の設定画面を表す図である。
【図7】本発明の一実施形態における表示装置の操作画面を表す図である。
【図8】図5中の手先の現在位置姿勢の演算処理の詳細を表すPAD図である。
【図9】図5中の各関節の目標回転角の演算処理の詳細を表すPAD図である。
【図10】図5中のリスト作成処理の詳細を表すPAD図である。
【図11】本発明の一実施形態におけるマニピュレータ分割表面と構造物分割表面との組合せを説明するための図である。
【図12】図5中の関節の目標回転角の補正処理の詳細を表すPAD図である。
【発明を実施するための形態】
【0014】
以下、本発明の好適な一実施形態である原子炉内検査装置を、図面を参照しつつ説明する。本実施形態の原子炉内検査装置は、原子炉内構造物の目視検査を目的としたものである。
【0015】
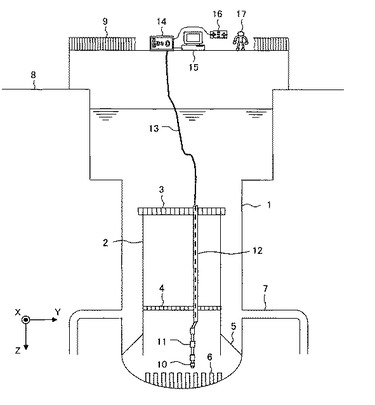
図1は、本実施形態による原子炉内検査装置の機器配置を一例として表す概略図である。なお、本実施形態では、絶対座標系として、図1中紙面に対し垂直な方向をX軸、図1中左右方向をY軸、図1中上下方向をZ軸にとっている。
【0016】
この図1において、原子炉1内には、シュラウド2、上部格子板3、炉心支持板4、シュラウドサポート5、及びCRD(Control Rod Device:制御棒駆動装置)ハウジング6等の構造物があり、またPLR(Primary Loop Re-circulation System:一次冷却材再循環系)配管7等の配管が接続されている。原子炉1の上部には、作業スペースであるオペレーションフロア8があり、同じく上方には、燃料交換装置9がある。
【0017】
本実施形態の原子炉内検査装置は、目視検査用カメラ10を先端部(手先)に搭載したマニピュレータ11(水中検査装置)と、このマニピュレータ11を上下方向に移動可能に収納するガイドパイプ12と、マニピュレータ11にケーブル13を介し接続された制御装置14と、この制御装置14に接続され、カメラ10の映像や位置姿勢等を表示する表示装置15と、制御装置14に接続されたコントローラ16とを備えている。コントローラ16は、複数の操作レバーを有し、これら操作レバーの操作に応じてカメラ10(言い換えれば、マニピュレータ11の手先)のX軸方向移動、Y軸方向移動、Z軸方向移動、Z軸周りの回転(ロール)、X軸周りの回転(ピッチ)、及びY軸周りの回転(ヨー)を指示するようになっている。
【0018】
そして、例えば原子炉1内の構造物の目視検査作業を行う場合は、まず、検査員17が燃料交換装置9を操作して、マニピュレータ11をチェーン(図示せず)で吊下げ、マニピュレータ11及びこれを収納して係合したガイドパイプ12を原子炉1内に投入する。そして、ガイドパイプ12を上部格子板3の格子に挿通し炉心支持板4に着座させて、ガイドパイプ12を位置決めする。その後、燃料交換装置8を操作して、マニピュレータ11を降下させ、マニピュレータ11の基端部をガイドパイプ12の下端部に位置決めする。その後、検査員17がカメラ10の映像や位置姿勢等を表示装置15で確認しつつ、コントローラ16を操作してマニピュレータ11を駆動させる。
【0019】
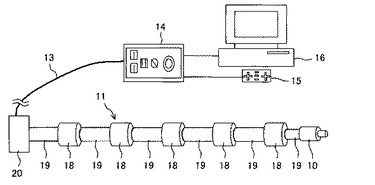
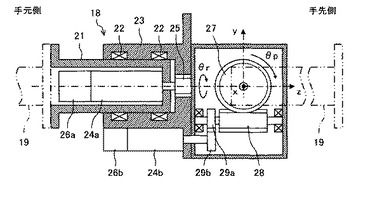
次に、マニピュレータ11について説明する。図2は、マニピュレータ11の全体構造を関連機器とともに表す概略図であり、図3は、マニピュレータ11を構成する駆動部の詳細構造を表す断面図である。なお、本実施形態では、駆動部毎のローカル座標系として、後述するホルダの回転中心軸とウォームホイールの回転中心軸との交点(2軸の回転中心)を原点とし、図3中紙面に対し垂直な方向をx軸、図3中上下方向をy軸、図3中左右方向をz軸にとっている。
【0020】
これら図2及び図3において、マニピュレータ11は、複数(本実施形態では5つ)の駆動部18を介し連結された複数(本実施形態では6つ)のリンク19で構成されている。マニピュレータ11の手先(先端)に位置するリンク19には目視検査用カメラ10が設けられている。また、マニピュレータ11の手元(基端)に位置するリンク19には信号伝送部20が設けられ、この信号伝送部20と制御装置14との間でケーブル13が接続されている。
【0021】
各駆動部18は、2つの回転機構を有しており、2自由度の関節として構成されている。駆動部18は、手元側のリンク19に連結されたホルダ21と、このホルダ21に軸受22を介し回転可能に接続されたボックス23と、ホルダ21内に固定されたモータ24aと、このモータ24aの出力軸に固着され、ボックス23の歯車穴に嵌合された歯車25とを備えている。そして、モータ24aの回転動力が歯車25を介しボックス23に伝達されることにより、ボックス23(言い換えれば、手先側のリンク19)がホルダ21(言い換えれば、手元側のリンク19)に対して回転する(第1の回転機構)。これにより、ローカル座標系のz軸周りの回転角(ロール角)θrを制御するようになっている。なお、モータ24aにはエンコーダ26aが付設されており、このエンコーダ26aは、モータ24aの回転角すなわちロール角θrを検出するようになっている。
【0022】
また、駆動部18は、ボックス23内に回転可能に設けられ、手先側のリンク19に連結されたウォームホイール27と、ボックス23内に回転可能に設けられ、ウォームホイール27と噛合うウォームギヤ28と、このウォームギヤ28と同軸に設けられた平歯車29aと、ボックス23に固定されたモータ24bと、このモータ24bの出力軸に固着され、平歯車29aに噛合う平歯車29bとを備えている。そして、モータ24bの回転動力が平歯車29a,29b及びウォームギヤ28を介しウォームホイール27に伝達されることにより、ウォームホイール27(言い換えれば、手先側のリンク19)がボックス23(言い換えれば、手元側のリンク19)に対して回転する(第2の回転機構)。これにより、ローカル座標系のx軸周りの回転角(ピッチ角)θpを制御するようになっている。なお、モータ24bにはエンコーダ26bが付設されており、このエンコーダ26bは、モータ24bの回転角を検出し、前述したピッチ角θpを間接的に検出するようになっている。
【0023】
カメラ10の映像信号と各駆動部18のエンコーダ26a,26b(すなわち、本実施形態では計10個のエンコーダ)の検出信号は、信号伝送部20及びケーブル13を介して制御装置14に送信されるようになっている。
【0024】
制御装置14は、カメラ10の映像信号を表示装置15に出力して、カメラ10の映像を表示させるようになっている。また、制御装置14は、各駆動部18のエンコーダ26a,26bの検出信号に基づいて各関節の現在回転角(詳細には、本実施形態では、第1のローカル座標系のロール角θ1r及びピッチ角θ1p、…、第5のローカル座標系のロール角θ5r及びピッチ角θ5p)を演算し、これに基づいてマニピュレータ11の手先の現在位置姿勢(詳細には、絶対座標系のX軸方向位置、Y軸方向位置、Z軸方向位置、ロール角θR、ピッチ角θP、ヨー角θY)を演算し、それらの演算値(現在値)を表示装置15に出力して表示させ、さらにマニピュレータ11及びその周囲の構造物の現在画像を構築して表示させるようになっている。
【0025】
また、制御装置14は、コントローラ16からの操作信号に応じてマニピュレータ11の手先の目標位置姿勢を演算し、これに基づいて各関節の目標回転角を演算し、各関節の目標回転角となるように、ケーブル13等を介し各駆動部18のモータ24a,24bに供給する電圧を制御する。これにより、マニピュレータ11の手先の位置姿勢を制御するようになっている。また、このとき、マニピュレータ11と構造物との衝突を回避する衝突回避制御も行っており、その制御内容が本実施形態の大きな特徴となっている。
【0026】
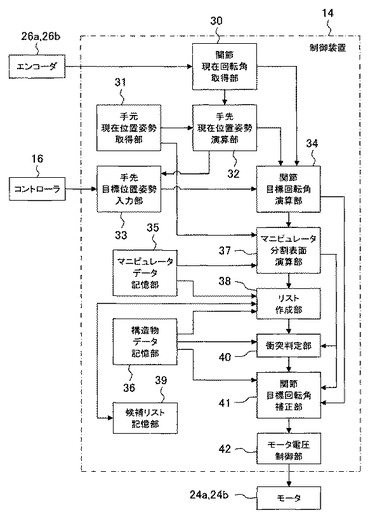
図4は、マニピュレータ11の手先位置姿勢制御に係わる制御装置14の機能的構成を表すブロック図である。
【0027】
この図4において、制御装置14は、マニピュレータ11の各駆動部18のエンコーダ26a,26bの検出信号に基づいて各関節の現在回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を取得する関節現在回転角取得部30と、マニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を取得する手元現在位置姿勢取得部31と、手元の現在位置姿勢及び各関節の現在回転角に基づいて手先の現在位置姿勢(X,Y,Z,θR,θP,θY)を演算する手先現在位置姿勢演算部32とを有している。また、コントローラ16の操作信号等に基づいて手先の目標位置姿勢(X_ref,Y_ref,Z_ref,θR_ref,θP_ref,θY_ref)を入力する手先目標位置姿勢入力部33と、手先の目標位置姿勢と現在位置姿勢との偏差に基づいて各関節の目標回転角(θ1r_ref,θ1p_ref,θ2r_ref,θ2p_ref,θ3r_ref,θ3p_ref,θ4r_ref,θ4p_ref,θ5r_ref,θ5p_ref)を演算する関節目標回転角演算部34とを有している。
【0028】
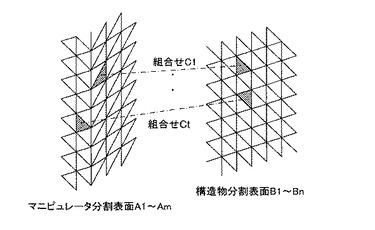
また、制御装置14は、マニピュレータ11の設計データ(詳細には、例えば各リンク19の表面及び各駆動部18の表面を多数に分割したマニピュレータ分割表面A1〜Amの形状及びそれらの相対的な位置関係等)を記憶するマニピュレータデータ記憶部35を有している。なお、本実施形態では、マニピュレータ分割表面A1〜Amはそれぞれ三角形状をなし(後述の図11参照)、各分割表面の3つの頂点の相対座標データが記憶されている。また、マニピュレータ分割表面A1〜Amは、複数の関節で区分された複数の部位のいずれに含まれるか、別の言い方をすれば、複数の駆動部18のいずれによって回転する部位(具体的には、各部位は、モータ26aによって回転するボックス23、並びにモータ26a,26bによって回転する手先側のリンク19及びこれに連結されたホルダ21からなる)であるか分類されて記憶されている。
【0029】
また、制御装置14は、原子炉内構造物の設計データ(詳細には、構造物の表面を多数に分割した構造物分割表面B1〜Bnの形状及びそれらの絶対位置等)を記憶する構造物データ記憶部36を有している。なお、本実施形態では、構造物分割表面B1〜Bnはそれぞれ、マニピュレータ分割表面A1〜Amと同程度の大きさであって三角形状をなし(後述の図11参照)、各分割表面の3つの頂点の絶対座標データが記憶されている。
【0030】
また、制御装置14は、マニピュレータ11の手先の目標位置姿勢に対応する分割表面A1〜Amの仮想配置を演算するマニピュレータ分割表面演算部37と、衝突判定を行うマニピュレータ分割表面と構造物分割表面との組合せからなる候補リストを作成するリスト作成部38と、このリスト作成部38で作成した候補リストを記憶するリスト記憶部39と、候補リストの各組合せにおいて仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定する衝突判定部40と、この衝突判定部40でマニピュレータ分割表面と構造物分割表面が衝突すると判定された場合に、衝突を回避するように関節の目標回転角を補正する関節目標回転角補正部41と、この関節目標回転角補正部41で補正された目標回転角(若しくは、補正の必要がなかった場合は、関節目標回転角演算部34で演算された目標回転角)となるように、各駆動部18のモータ26a,26bへ供給する電圧を制御するモータ電圧制御部42とを有している。
【0031】
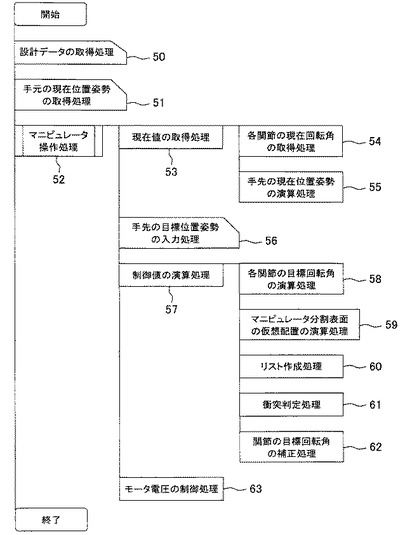
次に、マニピュレータ11の手先位置姿勢制御に係わる制御装置14の制御手順を説明する。図5は、制御装置14の制御処理内容を表すPAD図である。
【0032】
まず、ステップ50にて、制御装置14は、図6で示すような設定画面を表示装置15に表示させ、この設定画面の「操作対象データ読込」ボタン43aが操作されると(詳細には、例えばマウスの操作により、画面上のカーソルがボタン位置に合わされた状態でクリックされると)、マニピュレータ11の設計データを外部の記憶装置(図示せず)から取込んでマニピュレータデータ記憶部35に保存する。また、設定画面の「周囲構造物読込」ボタン43bが操作されると、構造物の設計データ(好ましくは、マニピュレータ11の存在する領域に対応して選択された構造物の設計データ)を外部の記憶装置から取込んで構造物データ記憶部36に保存する。そして、ステップ51に進み、例えばキーボード等の操作により、設定画面の手元現在位置姿勢入力欄44にマニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)が入力されると、制御装置14の手元現在位置姿勢取得部31は、それらの入力値を入力して保存する。なお、マニピュレータ11の手元の現在位置(X0,Y0,Z0)は、上部格子板3及び炉心支持板4におけるガイドパイプ12の設置位置によって求められる。また、本実施形態では、マニピュレータ11の手元の現在姿勢は、θR0=0、θP0=0、θY0=0である。
【0033】
その後、ステップ52に進み、制御装置14は、図7で示すような操作画面を表示装置15に表示させ、マニピュレータ操作処理に移る。このマニピュレータ操作処理では、まず、コントローラ16の操作の有無にかかわらず、ステップ53の現在値の取得処理を行う。現在値の取得処理では、ステップ54の各関節の現在回転角の取得処理、及びステップ55の手先の現在位置姿勢の演算処理を行う。そして、ステップ56に進み、コントローラ16が操作されると、その操作に応じて手先の目標位置姿勢の入力処理を行い、その後、ステップ57に進み、制御値の演算処理を行う。制御値の演算処理では、ステップ58の各関節の目標回転角の演算処理、ステップ59のマニピュレータ分割表面の仮想配置の演算処理、ステップ60のリスト作成処理、ステップ61の衝突判定処理、及びステップ62の関節の目標回転角の補正処理を行う。そして、ステップ63に進み、目標回転角に基づいてモータ電圧の制御処理を行う。前述した処理の詳細を、以下説明する。
【0034】
(1)各関節の現在回転角の演算処理(ステップ54)
各関節の現在回転角の演算処理では、制御装置14の関節現在回転角取得部30は、各駆動部18のエンコーダ26a,26bの検出信号に基づいて各関節の現在回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を演算する。詳細には、各エンコーダの検出信号(パルス信号)をカウントし、これにセンサ固有のスペックとして予め記憶された所定の回転角度変換係数を乗じて、各関節の現在回転角を演算する。そして、演算した各関節の現在回転角は、図示しないRAM(Random Access Memory:ランダムアクセスメモリ)等に保存するとともに、表示装置15の操作画面の関節現在回転角表示欄45に表示させるようになっている。
【0035】
(2)手先の現在位置姿勢の演算処理(ステップ55)
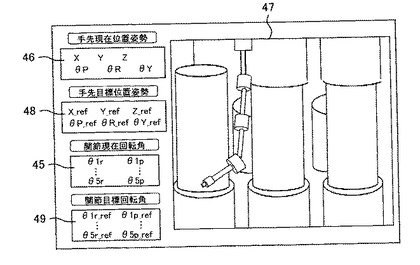
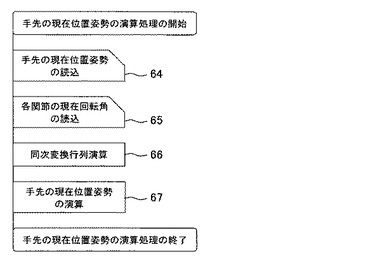
図8は、手先の現在位置姿勢の演算処理の詳細を表すPAD図である。この手先の現在位置姿勢の演算処理では、制御装置14の手先現在位置姿勢演算部32は、まず、ステップ64にて、手元現在位置姿勢取得部31で取得されたマニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込み、ステップ65にて、関節現在回転角取得部30で取得された関節の現在回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を読込む。そして、ステップ66に進み、順運動学演算の同次変換行列演算として、関節毎に予め定義された並進移動行列及び回転移動行列を含む行列式を乗算する。この行列式は、一般的にロボット工学等で用いられているものを使用するため、その詳細な説明を省略する。その後、ステップ67に進み、ステップ66で得られた行列(4行4列)の成分を用いて手先の現在位置姿勢(X,Y,Z,θR,θP,θY)を演算し、演算した手先の現在位置姿勢を図示しないRAM等に保存するとともに、表示装置15の操作画面の手先現在位置姿勢表示欄46に表示させるようになっている。
【0036】
なお、本実施形態では、制御装置14の画像構築部(図示せず)は、手元現在位置姿勢取得部32で取得された手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込み、関節現在回転角演算部30で取得された各関節の現在回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を読込み、マニピュレータデータ記憶部35で記憶されたデータを読込み、マニピュレータ分割表面A1〜Amの現在配置を演算する。詳細には、手元の現在位置姿勢及び各関節の現在回転角に基づいてマニピュレータ分割表面の座標変換処理を実施し、マニピュレータ分割表面の絶対位置座標データを生成し、この絶対位置座標データをRAM等に保存する。また、マニピュレータ分割表面の絶対位置座標データに基づいてマニピュレータ11の現在画像を構築する。また、マニピュレータ11の周囲の構造物のデータを構造物データ記憶部36から読込み、周囲構造物の画像を構築する。そして、マニピュレータの画像と周囲構造物の画像を合成して表示装置15の操作画面若しくは設定画面のマニピュレータ画像表示領域47に表示させるようになっている。これにより、検査員17がマニピュレータ画像表示領域47を見て、構造物に対するマニピュレータ11の現在配置を確認可能としている。
【0037】
(3)手先の目標位置姿勢の入力処理(ステップ56)
手先の目標位置姿勢入力処理では、制御装置14の手先目標位置姿勢入力部33は、まず、手元現在位置姿勢取得部31で取得されたマニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込む。そして、コントローラ16の操作信号を手先の移動回転方向及び移動回転量に換算し、これを手元の現在位置姿勢に加算して目標位置姿勢(X_ref,Y_ref,Z_ref,θR_ref,θP_ref,θY_ref)を演算する。そして、演算した手先の目標位置姿勢をRAM等に保存するとともに、表示装置15の操作画面の手先目標位置姿勢表示欄48に表示させるようになっている。
【0038】
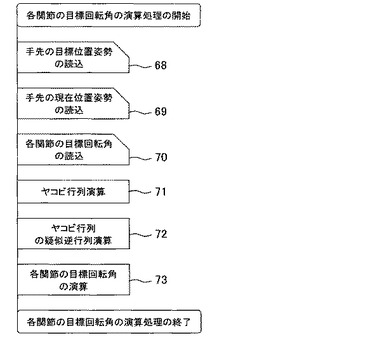
(4)各関節の目標回転角の演算処理(ステップ58)
図9は、各関節の目標回転角の演算処理の詳細を表すPAD図である。各関節の目標回転角の演算処理では、制御装置14の関節目標回転角演算部34は、まず、ステップ68にて、手先目標位置姿勢入力部33で入力された手先の目標位置姿勢を読込み、ステップ69にて、手元現在位置姿勢取得部31で取得されたマニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込み、ステップ70にて、関節現在回転角取得部30で取得された関節の目標回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を読込む。
【0039】
そして、ステップ71に進み、各関節の目標回転角と現在回転角との偏差Δθから手先の目標位置姿勢と現在位置姿勢との偏差ΔPを演算する際に用いるヤゴビ行列Jを算出し(下記の式(1)参照)、ステップ72に進み、そのヤコビ行列の逆行列J−1を算出する。ここで、本実施形態のマニピュレータ11の動作自由度は10であって、手先の位置姿勢の成分数の6を超えた冗長系であるから、ヤコビ行列Jは正方行列ではない。そのため、転置行列JTを用いて疑似逆行列演算を行い、ヤコビ行列の逆行列J−1を算出する(下記の式(2)参照)。
【0040】
【数1】

【0041】
【数2】
【0042】
【数3】
【0043】
そして、ステップ73に進み、手先の目標位置姿勢と現在位置姿勢との偏差ΔPから各関節の目標回転角と現在回転角との偏差Δθを演算し(上記の式(3)参照)、この偏差Δθをステップ69で読込んだ各関節の現在回転角に加算して目標回転角(θ1r_ref,θ1p_ref,θ2r_ref,θ2p_ref,θ3r_ref,θ3p_ref,θ4r_ref,θ4p_ref,θ5r_ref,θ5p_ref)を演算する。そして、演算した各関節の目標回転角をRAM等に保存するとともに、表示装置15の操作画面の関節目標回転角表示欄49に表示させるようになっている。
【0044】
(5)マニピュレータ分割表面の仮想配置の演算処理(ステップ59)
マニピュレータ分割表面の仮想配置の演算処理では、制御装置14のマニピュレータ分割表面演算部37は、手元現在位置姿勢取得部32で取得された手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込み、関節目標回転角演算部34で演算された各関節の目標回転角(θ1r_ref,θ1p_ref,θ2r_ref,θ2p_ref,θ3r_ref,θ3p_ref,θ4r_ref,θ4p_ref,θ5r_ref,θ5p_ref)を読込み、マニピュレータデータ記憶部35で記憶されたデータを読込み、マニピュレータ分割表面A1〜Amの仮想配置を演算する。詳細には、手元の現在位置姿勢及び各関節の目標回転角に基づいてマニピュレータ分割表面の座標変換処理を実施し、マニピュレータ分割表面の絶対位置座標データを生成し、この絶対位置座標データをRAM等に保存する。
【0045】
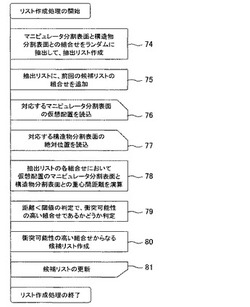
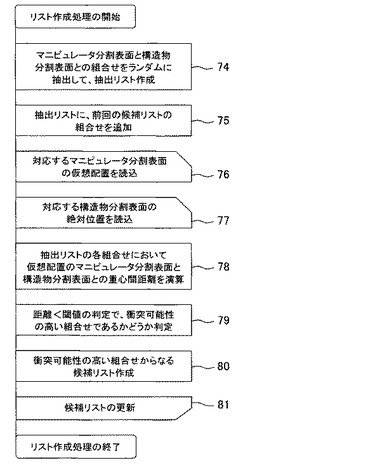
(6)リスト作成処理(ステップ60)
図10は、リスト作成処理の詳細を表すPAD図である。リスト作成処理では、制御装置14のリスト作成部38は、まず、ステップ74にて、マニピュレータデータ記憶部35で記憶された多数のマニピュレータ分割表面A1〜Amのうちのいずれか1つと構造物データ記憶部36で記憶された多数の構造物分割表面B1〜Bnのうちのいずれか1つとの組合せ(図11参照)を、予め設定された所定の件数(例えば総数の10%程度)だけランダムに抽出して、抽出リストを作成する。そして、最初のリスト作成処理ではステップ75(詳細は後述)をとばし、2回目以降のリスト作成処理ではステップ75を経由してステップ76に進み、抽出リストに含まれるマニピュレータ分割表面に対し、前述のステップ59で演算された仮想配置を読込む。また、ステップ77に進み、抽出リストに含まれる構造物分割表面に対し、構造物データ記憶部36から絶対位置を読込む。その後、ステップ78に進み、抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、ステップ79に進み、この重心間距離が予め設定された所定の閾値未満であるかどうか判定することによりマニピュレータ分割表面と構造物分割表面が衝突する可能性の高いものであるかどうかを判定する。そして、ステップ80に進み、衝突する可能性の高いものと判定した組合せからなる候補リストを作成し、その後、ステップ81に進み、作成した候補リストをリスト記憶部39に更新して記憶する。
【0046】
上述したステップ74〜78からなるリスト作成処理は、他の処理(衝突判定処理等)のタイミングとは異なり、予め設定された所定の時間間隔(衝突判定処理を行う時間間隔より短い時間間隔)で繰返し行っている。そして、ステップ75では、前回作成した候補リストの組合せをリスト記憶部39から読込み、ステップ74で作成した抽出リストに追加するようになっている。
【0047】
(7)衝突判定処理(ステップ61)
衝突判定処理では、制御装置14の衝突判定部40は、候補リストに含まれるマニピュレータ分割表面に対し、前述のステップ59で演算された仮想配置を読込む。また、候補リストに含まれる構造物分割表面に対し、構造物データ記憶部36から絶対位置を読込む。その後、候補リストの各組合せにおいて、仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを、公知の交差判定によって判定するようになっている。
【0048】
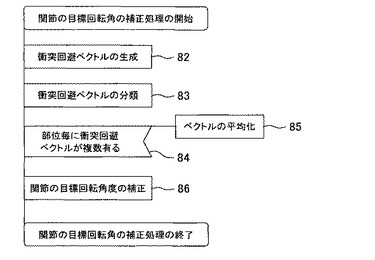
(8)関節の目標回転角の補正処理(ステップ62)
図12は、関節の目標回転角の補正処理の詳細を表すPAD図である。関節の目標回転角の補正処理では、制御装置14の関節目標回転角補正部41は、ステップ82にて、ステップ61で衝突すると判定された各組合せにおいて、仮想配置のマニピュレータ分割表面と構造部分割表面との位置関係から、仮想配置のマニピュレータ分割表面における頂点のうち最も構造物内側に位置するものを選択し、この頂点と構造物分割表面との距離を演算し、この距離以上の大きさを持ちかつ構造物分割表面の法線ベクトルと同じであって構造物の外側への向きを持つ衝突回避ベクトルを生成する。その後、ステップ83に進み、マニピュレータ分割表面が複数の関節で区分された複数の部位のいずれに含まれるか判別することにより、ステップ82で作成した衝突回避ベクトルを分類する。そして、ステップ83に進み、部位毎に衝突回避ベクトルが1つである場合はそのままとし、複数ある場合は、ステップ84に進み、衝突回避ベクトルを平均化する。その後、ステップ85に進み、平均化した衝突回避ベクトルに基づいて関節の目標回転角の補正量を演算し、この補正量をステップ58で演算された目標回転角に加算する。
【0049】
以上のように構成された本実施形態においては、制御装置14は、リスト作成処理にて、マニピュレータ分割表面と構造物分割表面との組合せをランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、この重心間距離が所定の閾値未満であるかどうか判定することにより衝突の可能性の高いものであるかどうかを判定し、衝突の可能性の高いものと判定した組合せからなる候補リストを作成する。そして、衝突判定処理にて、候補リストの各組合せにおいて仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定する。これにより、マニピュレータ11と構造物との衝突位置や干渉量を把握するためにマニピュレータ分割表面及び構造物分割表面を小さくとり多数に分割する場合であっても、コントローラ16を操作してから(言い換えれば、マニピュレータ11の手先の目標位置姿勢を入力してから)マニピュレータ11が駆動するまでの制御時間の短縮を図ることができる。すなわち、例えばマニピュレータ分割表面と構造物分割表面との総当たりの組合せにおいて衝突するかどうかを判定する制御方法と比べ、衝突判定処理時間の短縮を図ることができ、ひいては全体の制御時間の短縮を図ることができる。また、例えば全てのマニピュレータ分割表面と構造物分割表面との位置関係から衝突の可能性の高い組合せからなる候補リストを作成する制御方法と比べ、候補リスト作成処理時間の短縮を図ることができ、ひいては全体の制御時間の短縮を図ることができる。したがって、本実施形態においては、マニピュレータ11の手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータ11と構造物との衝突回避を図ることができる。
【0050】
また、本実施形態においては、制御装置14は、リスト作成処理を所定の時間間隔で繰返し行っており、抽出リストを作成する際に前回作成した候補リストの組合せを加える。これにより、例えば手先の目標位置姿勢や現在位置姿勢及び関節の目標回転角や現在回転角などの変化の有無にかかわらず、時間の経過とともに、候補リストにおける組合せの件数、すなわち衝突判定を行う組合せの件数を増加させることができる。その結果、マニピュレータ11と構造物との衝突回避性を向上させることができる。
【0051】
なお、上記一実施形態においては、マニピュレータ分割表面A1〜Am及び構造物分割表面B1〜Bnはそれぞれ三角形状をなす場合を例にとって説明したが、これに限られず、四角形等の他の形状をなしてもよいし、複数種類の形状が混在してもよい。このような場合も、上記同様の効果を得ることができる。
【0052】
また、上記一実施形態においては、表示装置14は、マニピュレータ11の現在画像及び周囲構造物の現在画像を構築して表示装置15の設定画面若しくは操作画面のマニピュレータ画像表示領域47に表示させる場合を例にとって説明したが、これに限られない。すなわち、例えば原子炉内にマニピュレータ観察用カメラを配置し、このカメラの映像をマニピュレータ画像表示領域47に表示させてもよい。この場合も、上記同様の効果を得ることができる。
【0053】
なお、以上においては、本発明の適用対象として、原子炉内構造物の目視検査作業を目的とし、マニピュレータ11の先端部に目視検査用カメラ10を搭載した原子炉内検査装置を例にとって説明したが、これに限られない。すなわち、原子炉内構造物に発生した欠陥の長さ及び深さを測定する探傷検査作業を目的とし、マニピュレータ11の先端部に渦電流センサ又は超音波センサを搭載した原子炉内検査装置に適用してもよい。また、原子炉内構造物の補修作業を目的とし、マニピュレータ11の先端部に補修器具を搭載した原子炉内補修装置に適用してもよい。また、原子炉以外の狭隘部にてマニピュレータを用いる装置に適用してもよい。その際、原子炉のように水中にてマニピュレータを用いる装置に限られず、気中にてマニピュレータを用いる装置に適用してもよい。これらの場合も、上記同様の効果を得ることができる。
【符号の説明】
【0054】
11 マニピュレータ
14 制御装置
16 コントローラ
18 駆動部
19 リンク
24a,24b モータ
26a,26b エンコーダ
【技術分野】
【0001】
本発明は、例えば原子炉内構造物の検査作業や補修作業に用いるマニピュレータに係わり、特に、マニピュレータを駆動制御する制御装置に関する。
【背景技術】
【0002】
従来、原子炉内構造物の検査作業や補修作業を目的とし、原子炉内の狭隘部にてマニピュレータを用いた検査装置が提唱されている(例えば、特許文献1参照)。特許文献1に記載の検査装置では、マニピュレータは5軸の回転機構を備えた多関節型椀機構として構成されており、それらの回転機構が制御装置によって駆動制御されている。そして、原子炉内構造物の探傷検査作業を行う場合は、超音波プローブを備えたスキャナをマニピュレータの手先(先端)に取付け、マニピュレータを操作して超音波プローブを検査対象部位の近傍に配置し、スキャナにより超音波プローブを検査対象部位の表面に接触させつつ走査するようになっている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−3400号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1には記載されていないが、上記制御装置は、例えば、マニピュレータの手先の目標位置姿勢が指示されると、対応する各軸の目標回転角を演算し、この目標回転角となるように回転機構を駆動制御するものと考えられる。また、制御装置は、マニピュレータと構造物との衝突を回避する衝突回避制御を行うことが好ましいと考えられる。この衝突回避制御では、前述のように演算した各軸の目標回転角に基づいてマニピュレータの表面の仮想配置を演算し、この仮想配置のマニピュレータの表面と構造物の表面とが衝突するかどうかを判定し、衝突すると判定した場合に衝突を回避するように各軸の目標回転角を補正し、この補正後の目標回転角となるように回転機構を駆動制御する。ところが、マニピュレータは狭隘部に配置されていることから、マニピュレータと構造物との衝突位置や干渉量を把握するために、マニピュレータの表面及び構造物の表面を小さくとり多数に分割する必要がある。そして、例えば、多数のマニピュレータの分割表面と多数の構造物の分割表面との総当たりの組合せにおいて衝突判定を行うのであれば、その衝突判定に時間がかかってしまう。あるいは、例えば、全てのマニピュレータの分割表面と構造物の分割表面との位置関係から、衝突判定を行うべき組合せを事前に設定するのであれば、その設定に時間がかかってしまう。いずれの場合にしても、マニピュレータの手先の目標位置姿勢を指示してから駆動するまでの制御時間が長くなる。かといって、マニピュレータの表面及び構造物の表面を大きくとり少数に分割すれば、マニピュレータと構造物との衝突位置や干渉量を十分に把握できないため、マニピュレータが構造物に近づけられなくなり、場合によってはマニピュレータが身動きできなくなってしまう。
【0005】
本発明は、上記事柄に鑑みてなされたものであり、マニピュレータの手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータと構造物との衝突回避を図ることができるマニピュレータの制御装置を提供することにある。
【課題を解決するための手段】
【0006】
(1)上記目的を達成するために、本発明は、複数の関節を介し連結された複数のリンクからなるマニピュレータに対し、各関節の回転角を制御することにより手先の位置姿勢を制御する制御装置において、前記マニピュレータに関するデータとして、各リンクの表面及び各関節の表面を多数に分割したマニピュレータ分割表面の形状及びそれらの相対的な位置関係を記憶する第1記憶手段と、前記マニピュレータの周囲の構造物に関するデータとして、前記構造物の表面を多数に分割した構造物分割表面の形状及びそれらの絶対位置を記憶する第2記憶手段と、前記マニピュレータの手元の現在位置姿勢を取得する手元現在位置姿勢取得手段と、前記マニピュレータの手先の目標位置姿勢を入力する手先目標位置姿勢入力手段と、前記手元現在位置姿勢取得手段で取得された手元の現在位置姿勢及び前記手先目標位置姿勢入力手段で入力された手先の目標位置姿勢に基づき、各関節の目標回転角を演算する関節目標回転角演算手段と、前記手元現在位置取得手段で取得された手元の現在位置姿勢、前記関節目標回転角演算手段で演算された各関節の目標回転角、並びに前記第1記憶手段で記憶されたデータに基づき、前記手先の目標位置姿勢に対応する前記多数のマニピュレータ分割表面の仮想配置を演算するマニピュレータ分割表面演算手段と、前記第1記憶手段で記憶された前記多数のマニピュレータ分割表面のうちのいずれか1つと前記第2記憶手段で記憶された前記多数の構造物分割表面のうちのいずれか1つとの組合せを予め設定された所定の件数だけランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける前記仮想配置の前記マニピュレータ分割表面と前記構造物分割表面との重心間距離を演算し、この重心間距離が予め設定された所定の閾値未満であるかどうか判定することにより前記マニピュレータ分割表面と前記構造物分割表面が衝突する可能性の高いものであるかどうかを判定し、衝突する可能性の高いものと判定した組合せからなる候補リストを作成する処理を行うリスト作成手段と、前記リスト作成手段で作成された候補リストの各組合せにおいて前記仮想配置の前記マニピュレータ分割表面と前記構造物分割表面が衝突するかどうかを判定する衝突判定手段と、前記衝突判定手段で前記マニピュレータ分割表面と前記構造物分割表面が衝突すると判定された場合に、衝突を回避するように前記関節の目標回転角を補正する関節目標回転角補正手段とを備える。
【0007】
このように本発明においては、リスト作成手段は、マニピュレータ分割表面と構造物分割表面との組合せをランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、この重心間距離が所定の閾値未満であるかどうか判定することにより衝突の可能性の高いものであるかどうかを判定し、衝突の可能性の高いものと判定した組合せからなる候補リストを作成する。衝突判定手段は、候補リストの各組合せにおいて、仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定する。これにより、マニピュレータと構造物との衝突位置や干渉量を把握するためにマニピュレータ分割表面及び構造物分割表面を小さくとり多数に分割する場合であっても、手先の目標位置姿勢を入力してから駆動するまでの制御時間の短縮を図ることができる。すなわち、例えばマニピュレータ分割表面と構造物分割表面との総当たりの組合せにおいて衝突するかどうかを判定する制御方法と比べ、衝突判定処理時間の短縮を図ることができ、ひいては全体の制御時間の短縮を図ることができる。また、例えば全てのマニピュレータ分割表面と構造物分割表面との位置関係から衝突の可能性の高い組合せからなる候補リストを作成する制御方法と比べ、候補リスト作成処理時間の短縮を図ることができ、ひいては全体の制御時間の短縮を図ることができる。したがって、本発明においては、マニピュレータの手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータと構造物との衝突回避を図ることができる。
【0008】
(2)上記(1)において、好ましくは、前記リスト作成手段は、前記処理を予め設定された所定の時間間隔で繰返し行っており、前記抽出リストを作成する際に前回作成した候補リストの組合せを加える。
【0009】
これにより、例えば手先の目標位置姿勢や現在位置姿勢及び関節の目標回転角や現在回転角などの変化の有無にかかわらず、時間の経過とともに、候補リストにおける組合せの件数、すなわち衝突判定を行う組合せの件数を増加させることができる。その結果、マニピュレータと構造物との衝突回避性を向上させることができる。
【0010】
(3)上記(1)又は(2)において、好ましくは、前記関節目標回転角補正手段は、前記衝突判定手段で衝突すると判定された前記仮想配置の前記マニピュレータ分割表面の頂点のうち最も前記構造物の内側に位置するものを選択し、この選択した頂点と前記構造物分割表面との距離以上の大きさを持ちかつ前記構造物分割表面の法線ベクトルと同じであって前記構造物の外側への向きを持つ衝突回避ベクトルを生成する衝突回避ベクトル生成手段と、前記衝突判定手段で衝突すると判定された前記マニピュレータ分割表面が、前記複数の関節で区分された複数の部位のいずれに含まれるか判別することにより、前記マニピュレータ分割表面に対応する前記衝突回避ベクトルを分類する分類手段と、前記衝突回避ベクトルを前記部位毎に平均化し、この平均化した衝突回避ベクトルに基づいて前記各関節の目標回転角の補正量を演算する関節目標回転角補正量演算手段とを備える。
【0011】
(4)上記(1)〜(3)のいずれか1つにおいて、好ましくは、前記マニピュレータの各関節の現在回転角を取得する関節現在回転角取得手段と、前記手元現在位置姿勢取得手段で取得された手元の現在位置姿勢及び前記関節現在回転角取得手段で取得された各関節の現在回転角に基づき、手先の現在位置姿勢を演算する手先現在位置姿勢演算手段とを備え、前記関節目標回転角演算手段は、前記手先目標位置姿勢入力手段で入力された手先の目標位置姿勢と前記手先現在位置姿勢演算手段で演算された手先の現在位置姿勢との偏差を演算し、この位置姿勢の偏差に基づき各関節の目標回転角と現在回転角との偏差を演算し、この各関節回転角の偏差を前記関節現在回転角取得手段で取得された各関節の現在回転角に加算して各関節の目標回転角を演算する。
【発明の効果】
【0012】
本発明によれば、マニピュレータの手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータと構造物との衝突回避を図ることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態による原子炉内検査装置の機器配置を一例として表す概略図である。
【図2】本発明の一実施形態におけるマニピュレータの全体構造を関連機器とともに表す概略図である。
【図3】本発明の一実施形態におけるマニピュレータを構成する駆動部の詳細構造を表す断面図である。
【図4】本発明の一実施形態におけるマニピュレータの手先位置姿勢制御に係わる制御装置の機能的構成を表すブロック図である。
【図5】本発明の一実施形態におけるマニピュレータの手先位置姿勢制御に係わる制御装置の制御処理内容を表すPAD図である。
【図6】本発明の一実施形態における表示装置の設定画面を表す図である。
【図7】本発明の一実施形態における表示装置の操作画面を表す図である。
【図8】図5中の手先の現在位置姿勢の演算処理の詳細を表すPAD図である。
【図9】図5中の各関節の目標回転角の演算処理の詳細を表すPAD図である。
【図10】図5中のリスト作成処理の詳細を表すPAD図である。
【図11】本発明の一実施形態におけるマニピュレータ分割表面と構造物分割表面との組合せを説明するための図である。
【図12】図5中の関節の目標回転角の補正処理の詳細を表すPAD図である。
【発明を実施するための形態】
【0014】
以下、本発明の好適な一実施形態である原子炉内検査装置を、図面を参照しつつ説明する。本実施形態の原子炉内検査装置は、原子炉内構造物の目視検査を目的としたものである。
【0015】
図1は、本実施形態による原子炉内検査装置の機器配置を一例として表す概略図である。なお、本実施形態では、絶対座標系として、図1中紙面に対し垂直な方向をX軸、図1中左右方向をY軸、図1中上下方向をZ軸にとっている。
【0016】
この図1において、原子炉1内には、シュラウド2、上部格子板3、炉心支持板4、シュラウドサポート5、及びCRD(Control Rod Device:制御棒駆動装置)ハウジング6等の構造物があり、またPLR(Primary Loop Re-circulation System:一次冷却材再循環系)配管7等の配管が接続されている。原子炉1の上部には、作業スペースであるオペレーションフロア8があり、同じく上方には、燃料交換装置9がある。
【0017】
本実施形態の原子炉内検査装置は、目視検査用カメラ10を先端部(手先)に搭載したマニピュレータ11(水中検査装置)と、このマニピュレータ11を上下方向に移動可能に収納するガイドパイプ12と、マニピュレータ11にケーブル13を介し接続された制御装置14と、この制御装置14に接続され、カメラ10の映像や位置姿勢等を表示する表示装置15と、制御装置14に接続されたコントローラ16とを備えている。コントローラ16は、複数の操作レバーを有し、これら操作レバーの操作に応じてカメラ10(言い換えれば、マニピュレータ11の手先)のX軸方向移動、Y軸方向移動、Z軸方向移動、Z軸周りの回転(ロール)、X軸周りの回転(ピッチ)、及びY軸周りの回転(ヨー)を指示するようになっている。
【0018】
そして、例えば原子炉1内の構造物の目視検査作業を行う場合は、まず、検査員17が燃料交換装置9を操作して、マニピュレータ11をチェーン(図示せず)で吊下げ、マニピュレータ11及びこれを収納して係合したガイドパイプ12を原子炉1内に投入する。そして、ガイドパイプ12を上部格子板3の格子に挿通し炉心支持板4に着座させて、ガイドパイプ12を位置決めする。その後、燃料交換装置8を操作して、マニピュレータ11を降下させ、マニピュレータ11の基端部をガイドパイプ12の下端部に位置決めする。その後、検査員17がカメラ10の映像や位置姿勢等を表示装置15で確認しつつ、コントローラ16を操作してマニピュレータ11を駆動させる。
【0019】
次に、マニピュレータ11について説明する。図2は、マニピュレータ11の全体構造を関連機器とともに表す概略図であり、図3は、マニピュレータ11を構成する駆動部の詳細構造を表す断面図である。なお、本実施形態では、駆動部毎のローカル座標系として、後述するホルダの回転中心軸とウォームホイールの回転中心軸との交点(2軸の回転中心)を原点とし、図3中紙面に対し垂直な方向をx軸、図3中上下方向をy軸、図3中左右方向をz軸にとっている。
【0020】
これら図2及び図3において、マニピュレータ11は、複数(本実施形態では5つ)の駆動部18を介し連結された複数(本実施形態では6つ)のリンク19で構成されている。マニピュレータ11の手先(先端)に位置するリンク19には目視検査用カメラ10が設けられている。また、マニピュレータ11の手元(基端)に位置するリンク19には信号伝送部20が設けられ、この信号伝送部20と制御装置14との間でケーブル13が接続されている。
【0021】
各駆動部18は、2つの回転機構を有しており、2自由度の関節として構成されている。駆動部18は、手元側のリンク19に連結されたホルダ21と、このホルダ21に軸受22を介し回転可能に接続されたボックス23と、ホルダ21内に固定されたモータ24aと、このモータ24aの出力軸に固着され、ボックス23の歯車穴に嵌合された歯車25とを備えている。そして、モータ24aの回転動力が歯車25を介しボックス23に伝達されることにより、ボックス23(言い換えれば、手先側のリンク19)がホルダ21(言い換えれば、手元側のリンク19)に対して回転する(第1の回転機構)。これにより、ローカル座標系のz軸周りの回転角(ロール角)θrを制御するようになっている。なお、モータ24aにはエンコーダ26aが付設されており、このエンコーダ26aは、モータ24aの回転角すなわちロール角θrを検出するようになっている。
【0022】
また、駆動部18は、ボックス23内に回転可能に設けられ、手先側のリンク19に連結されたウォームホイール27と、ボックス23内に回転可能に設けられ、ウォームホイール27と噛合うウォームギヤ28と、このウォームギヤ28と同軸に設けられた平歯車29aと、ボックス23に固定されたモータ24bと、このモータ24bの出力軸に固着され、平歯車29aに噛合う平歯車29bとを備えている。そして、モータ24bの回転動力が平歯車29a,29b及びウォームギヤ28を介しウォームホイール27に伝達されることにより、ウォームホイール27(言い換えれば、手先側のリンク19)がボックス23(言い換えれば、手元側のリンク19)に対して回転する(第2の回転機構)。これにより、ローカル座標系のx軸周りの回転角(ピッチ角)θpを制御するようになっている。なお、モータ24bにはエンコーダ26bが付設されており、このエンコーダ26bは、モータ24bの回転角を検出し、前述したピッチ角θpを間接的に検出するようになっている。
【0023】
カメラ10の映像信号と各駆動部18のエンコーダ26a,26b(すなわち、本実施形態では計10個のエンコーダ)の検出信号は、信号伝送部20及びケーブル13を介して制御装置14に送信されるようになっている。
【0024】
制御装置14は、カメラ10の映像信号を表示装置15に出力して、カメラ10の映像を表示させるようになっている。また、制御装置14は、各駆動部18のエンコーダ26a,26bの検出信号に基づいて各関節の現在回転角(詳細には、本実施形態では、第1のローカル座標系のロール角θ1r及びピッチ角θ1p、…、第5のローカル座標系のロール角θ5r及びピッチ角θ5p)を演算し、これに基づいてマニピュレータ11の手先の現在位置姿勢(詳細には、絶対座標系のX軸方向位置、Y軸方向位置、Z軸方向位置、ロール角θR、ピッチ角θP、ヨー角θY)を演算し、それらの演算値(現在値)を表示装置15に出力して表示させ、さらにマニピュレータ11及びその周囲の構造物の現在画像を構築して表示させるようになっている。
【0025】
また、制御装置14は、コントローラ16からの操作信号に応じてマニピュレータ11の手先の目標位置姿勢を演算し、これに基づいて各関節の目標回転角を演算し、各関節の目標回転角となるように、ケーブル13等を介し各駆動部18のモータ24a,24bに供給する電圧を制御する。これにより、マニピュレータ11の手先の位置姿勢を制御するようになっている。また、このとき、マニピュレータ11と構造物との衝突を回避する衝突回避制御も行っており、その制御内容が本実施形態の大きな特徴となっている。
【0026】
図4は、マニピュレータ11の手先位置姿勢制御に係わる制御装置14の機能的構成を表すブロック図である。
【0027】
この図4において、制御装置14は、マニピュレータ11の各駆動部18のエンコーダ26a,26bの検出信号に基づいて各関節の現在回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を取得する関節現在回転角取得部30と、マニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を取得する手元現在位置姿勢取得部31と、手元の現在位置姿勢及び各関節の現在回転角に基づいて手先の現在位置姿勢(X,Y,Z,θR,θP,θY)を演算する手先現在位置姿勢演算部32とを有している。また、コントローラ16の操作信号等に基づいて手先の目標位置姿勢(X_ref,Y_ref,Z_ref,θR_ref,θP_ref,θY_ref)を入力する手先目標位置姿勢入力部33と、手先の目標位置姿勢と現在位置姿勢との偏差に基づいて各関節の目標回転角(θ1r_ref,θ1p_ref,θ2r_ref,θ2p_ref,θ3r_ref,θ3p_ref,θ4r_ref,θ4p_ref,θ5r_ref,θ5p_ref)を演算する関節目標回転角演算部34とを有している。
【0028】
また、制御装置14は、マニピュレータ11の設計データ(詳細には、例えば各リンク19の表面及び各駆動部18の表面を多数に分割したマニピュレータ分割表面A1〜Amの形状及びそれらの相対的な位置関係等)を記憶するマニピュレータデータ記憶部35を有している。なお、本実施形態では、マニピュレータ分割表面A1〜Amはそれぞれ三角形状をなし(後述の図11参照)、各分割表面の3つの頂点の相対座標データが記憶されている。また、マニピュレータ分割表面A1〜Amは、複数の関節で区分された複数の部位のいずれに含まれるか、別の言い方をすれば、複数の駆動部18のいずれによって回転する部位(具体的には、各部位は、モータ26aによって回転するボックス23、並びにモータ26a,26bによって回転する手先側のリンク19及びこれに連結されたホルダ21からなる)であるか分類されて記憶されている。
【0029】
また、制御装置14は、原子炉内構造物の設計データ(詳細には、構造物の表面を多数に分割した構造物分割表面B1〜Bnの形状及びそれらの絶対位置等)を記憶する構造物データ記憶部36を有している。なお、本実施形態では、構造物分割表面B1〜Bnはそれぞれ、マニピュレータ分割表面A1〜Amと同程度の大きさであって三角形状をなし(後述の図11参照)、各分割表面の3つの頂点の絶対座標データが記憶されている。
【0030】
また、制御装置14は、マニピュレータ11の手先の目標位置姿勢に対応する分割表面A1〜Amの仮想配置を演算するマニピュレータ分割表面演算部37と、衝突判定を行うマニピュレータ分割表面と構造物分割表面との組合せからなる候補リストを作成するリスト作成部38と、このリスト作成部38で作成した候補リストを記憶するリスト記憶部39と、候補リストの各組合せにおいて仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定する衝突判定部40と、この衝突判定部40でマニピュレータ分割表面と構造物分割表面が衝突すると判定された場合に、衝突を回避するように関節の目標回転角を補正する関節目標回転角補正部41と、この関節目標回転角補正部41で補正された目標回転角(若しくは、補正の必要がなかった場合は、関節目標回転角演算部34で演算された目標回転角)となるように、各駆動部18のモータ26a,26bへ供給する電圧を制御するモータ電圧制御部42とを有している。
【0031】
次に、マニピュレータ11の手先位置姿勢制御に係わる制御装置14の制御手順を説明する。図5は、制御装置14の制御処理内容を表すPAD図である。
【0032】
まず、ステップ50にて、制御装置14は、図6で示すような設定画面を表示装置15に表示させ、この設定画面の「操作対象データ読込」ボタン43aが操作されると(詳細には、例えばマウスの操作により、画面上のカーソルがボタン位置に合わされた状態でクリックされると)、マニピュレータ11の設計データを外部の記憶装置(図示せず)から取込んでマニピュレータデータ記憶部35に保存する。また、設定画面の「周囲構造物読込」ボタン43bが操作されると、構造物の設計データ(好ましくは、マニピュレータ11の存在する領域に対応して選択された構造物の設計データ)を外部の記憶装置から取込んで構造物データ記憶部36に保存する。そして、ステップ51に進み、例えばキーボード等の操作により、設定画面の手元現在位置姿勢入力欄44にマニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)が入力されると、制御装置14の手元現在位置姿勢取得部31は、それらの入力値を入力して保存する。なお、マニピュレータ11の手元の現在位置(X0,Y0,Z0)は、上部格子板3及び炉心支持板4におけるガイドパイプ12の設置位置によって求められる。また、本実施形態では、マニピュレータ11の手元の現在姿勢は、θR0=0、θP0=0、θY0=0である。
【0033】
その後、ステップ52に進み、制御装置14は、図7で示すような操作画面を表示装置15に表示させ、マニピュレータ操作処理に移る。このマニピュレータ操作処理では、まず、コントローラ16の操作の有無にかかわらず、ステップ53の現在値の取得処理を行う。現在値の取得処理では、ステップ54の各関節の現在回転角の取得処理、及びステップ55の手先の現在位置姿勢の演算処理を行う。そして、ステップ56に進み、コントローラ16が操作されると、その操作に応じて手先の目標位置姿勢の入力処理を行い、その後、ステップ57に進み、制御値の演算処理を行う。制御値の演算処理では、ステップ58の各関節の目標回転角の演算処理、ステップ59のマニピュレータ分割表面の仮想配置の演算処理、ステップ60のリスト作成処理、ステップ61の衝突判定処理、及びステップ62の関節の目標回転角の補正処理を行う。そして、ステップ63に進み、目標回転角に基づいてモータ電圧の制御処理を行う。前述した処理の詳細を、以下説明する。
【0034】
(1)各関節の現在回転角の演算処理(ステップ54)
各関節の現在回転角の演算処理では、制御装置14の関節現在回転角取得部30は、各駆動部18のエンコーダ26a,26bの検出信号に基づいて各関節の現在回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を演算する。詳細には、各エンコーダの検出信号(パルス信号)をカウントし、これにセンサ固有のスペックとして予め記憶された所定の回転角度変換係数を乗じて、各関節の現在回転角を演算する。そして、演算した各関節の現在回転角は、図示しないRAM(Random Access Memory:ランダムアクセスメモリ)等に保存するとともに、表示装置15の操作画面の関節現在回転角表示欄45に表示させるようになっている。
【0035】
(2)手先の現在位置姿勢の演算処理(ステップ55)
図8は、手先の現在位置姿勢の演算処理の詳細を表すPAD図である。この手先の現在位置姿勢の演算処理では、制御装置14の手先現在位置姿勢演算部32は、まず、ステップ64にて、手元現在位置姿勢取得部31で取得されたマニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込み、ステップ65にて、関節現在回転角取得部30で取得された関節の現在回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を読込む。そして、ステップ66に進み、順運動学演算の同次変換行列演算として、関節毎に予め定義された並進移動行列及び回転移動行列を含む行列式を乗算する。この行列式は、一般的にロボット工学等で用いられているものを使用するため、その詳細な説明を省略する。その後、ステップ67に進み、ステップ66で得られた行列(4行4列)の成分を用いて手先の現在位置姿勢(X,Y,Z,θR,θP,θY)を演算し、演算した手先の現在位置姿勢を図示しないRAM等に保存するとともに、表示装置15の操作画面の手先現在位置姿勢表示欄46に表示させるようになっている。
【0036】
なお、本実施形態では、制御装置14の画像構築部(図示せず)は、手元現在位置姿勢取得部32で取得された手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込み、関節現在回転角演算部30で取得された各関節の現在回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を読込み、マニピュレータデータ記憶部35で記憶されたデータを読込み、マニピュレータ分割表面A1〜Amの現在配置を演算する。詳細には、手元の現在位置姿勢及び各関節の現在回転角に基づいてマニピュレータ分割表面の座標変換処理を実施し、マニピュレータ分割表面の絶対位置座標データを生成し、この絶対位置座標データをRAM等に保存する。また、マニピュレータ分割表面の絶対位置座標データに基づいてマニピュレータ11の現在画像を構築する。また、マニピュレータ11の周囲の構造物のデータを構造物データ記憶部36から読込み、周囲構造物の画像を構築する。そして、マニピュレータの画像と周囲構造物の画像を合成して表示装置15の操作画面若しくは設定画面のマニピュレータ画像表示領域47に表示させるようになっている。これにより、検査員17がマニピュレータ画像表示領域47を見て、構造物に対するマニピュレータ11の現在配置を確認可能としている。
【0037】
(3)手先の目標位置姿勢の入力処理(ステップ56)
手先の目標位置姿勢入力処理では、制御装置14の手先目標位置姿勢入力部33は、まず、手元現在位置姿勢取得部31で取得されたマニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込む。そして、コントローラ16の操作信号を手先の移動回転方向及び移動回転量に換算し、これを手元の現在位置姿勢に加算して目標位置姿勢(X_ref,Y_ref,Z_ref,θR_ref,θP_ref,θY_ref)を演算する。そして、演算した手先の目標位置姿勢をRAM等に保存するとともに、表示装置15の操作画面の手先目標位置姿勢表示欄48に表示させるようになっている。
【0038】
(4)各関節の目標回転角の演算処理(ステップ58)
図9は、各関節の目標回転角の演算処理の詳細を表すPAD図である。各関節の目標回転角の演算処理では、制御装置14の関節目標回転角演算部34は、まず、ステップ68にて、手先目標位置姿勢入力部33で入力された手先の目標位置姿勢を読込み、ステップ69にて、手元現在位置姿勢取得部31で取得されたマニピュレータ11の手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込み、ステップ70にて、関節現在回転角取得部30で取得された関節の目標回転角(θ1r,θ1p,θ2r,θ2p,θ3r,θ3p,θ4r,θ4p,θ5r,θ5p)を読込む。
【0039】
そして、ステップ71に進み、各関節の目標回転角と現在回転角との偏差Δθから手先の目標位置姿勢と現在位置姿勢との偏差ΔPを演算する際に用いるヤゴビ行列Jを算出し(下記の式(1)参照)、ステップ72に進み、そのヤコビ行列の逆行列J−1を算出する。ここで、本実施形態のマニピュレータ11の動作自由度は10であって、手先の位置姿勢の成分数の6を超えた冗長系であるから、ヤコビ行列Jは正方行列ではない。そのため、転置行列JTを用いて疑似逆行列演算を行い、ヤコビ行列の逆行列J−1を算出する(下記の式(2)参照)。
【0040】
【数1】
【0041】
【数2】
【0042】
【数3】
【0043】
そして、ステップ73に進み、手先の目標位置姿勢と現在位置姿勢との偏差ΔPから各関節の目標回転角と現在回転角との偏差Δθを演算し(上記の式(3)参照)、この偏差Δθをステップ69で読込んだ各関節の現在回転角に加算して目標回転角(θ1r_ref,θ1p_ref,θ2r_ref,θ2p_ref,θ3r_ref,θ3p_ref,θ4r_ref,θ4p_ref,θ5r_ref,θ5p_ref)を演算する。そして、演算した各関節の目標回転角をRAM等に保存するとともに、表示装置15の操作画面の関節目標回転角表示欄49に表示させるようになっている。
【0044】
(5)マニピュレータ分割表面の仮想配置の演算処理(ステップ59)
マニピュレータ分割表面の仮想配置の演算処理では、制御装置14のマニピュレータ分割表面演算部37は、手元現在位置姿勢取得部32で取得された手元の現在位置姿勢(X0,Y0,Z0,θR0,θP0,θY0)を読込み、関節目標回転角演算部34で演算された各関節の目標回転角(θ1r_ref,θ1p_ref,θ2r_ref,θ2p_ref,θ3r_ref,θ3p_ref,θ4r_ref,θ4p_ref,θ5r_ref,θ5p_ref)を読込み、マニピュレータデータ記憶部35で記憶されたデータを読込み、マニピュレータ分割表面A1〜Amの仮想配置を演算する。詳細には、手元の現在位置姿勢及び各関節の目標回転角に基づいてマニピュレータ分割表面の座標変換処理を実施し、マニピュレータ分割表面の絶対位置座標データを生成し、この絶対位置座標データをRAM等に保存する。
【0045】
(6)リスト作成処理(ステップ60)
図10は、リスト作成処理の詳細を表すPAD図である。リスト作成処理では、制御装置14のリスト作成部38は、まず、ステップ74にて、マニピュレータデータ記憶部35で記憶された多数のマニピュレータ分割表面A1〜Amのうちのいずれか1つと構造物データ記憶部36で記憶された多数の構造物分割表面B1〜Bnのうちのいずれか1つとの組合せ(図11参照)を、予め設定された所定の件数(例えば総数の10%程度)だけランダムに抽出して、抽出リストを作成する。そして、最初のリスト作成処理ではステップ75(詳細は後述)をとばし、2回目以降のリスト作成処理ではステップ75を経由してステップ76に進み、抽出リストに含まれるマニピュレータ分割表面に対し、前述のステップ59で演算された仮想配置を読込む。また、ステップ77に進み、抽出リストに含まれる構造物分割表面に対し、構造物データ記憶部36から絶対位置を読込む。その後、ステップ78に進み、抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、ステップ79に進み、この重心間距離が予め設定された所定の閾値未満であるかどうか判定することによりマニピュレータ分割表面と構造物分割表面が衝突する可能性の高いものであるかどうかを判定する。そして、ステップ80に進み、衝突する可能性の高いものと判定した組合せからなる候補リストを作成し、その後、ステップ81に進み、作成した候補リストをリスト記憶部39に更新して記憶する。
【0046】
上述したステップ74〜78からなるリスト作成処理は、他の処理(衝突判定処理等)のタイミングとは異なり、予め設定された所定の時間間隔(衝突判定処理を行う時間間隔より短い時間間隔)で繰返し行っている。そして、ステップ75では、前回作成した候補リストの組合せをリスト記憶部39から読込み、ステップ74で作成した抽出リストに追加するようになっている。
【0047】
(7)衝突判定処理(ステップ61)
衝突判定処理では、制御装置14の衝突判定部40は、候補リストに含まれるマニピュレータ分割表面に対し、前述のステップ59で演算された仮想配置を読込む。また、候補リストに含まれる構造物分割表面に対し、構造物データ記憶部36から絶対位置を読込む。その後、候補リストの各組合せにおいて、仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを、公知の交差判定によって判定するようになっている。
【0048】
(8)関節の目標回転角の補正処理(ステップ62)
図12は、関節の目標回転角の補正処理の詳細を表すPAD図である。関節の目標回転角の補正処理では、制御装置14の関節目標回転角補正部41は、ステップ82にて、ステップ61で衝突すると判定された各組合せにおいて、仮想配置のマニピュレータ分割表面と構造部分割表面との位置関係から、仮想配置のマニピュレータ分割表面における頂点のうち最も構造物内側に位置するものを選択し、この頂点と構造物分割表面との距離を演算し、この距離以上の大きさを持ちかつ構造物分割表面の法線ベクトルと同じであって構造物の外側への向きを持つ衝突回避ベクトルを生成する。その後、ステップ83に進み、マニピュレータ分割表面が複数の関節で区分された複数の部位のいずれに含まれるか判別することにより、ステップ82で作成した衝突回避ベクトルを分類する。そして、ステップ83に進み、部位毎に衝突回避ベクトルが1つである場合はそのままとし、複数ある場合は、ステップ84に進み、衝突回避ベクトルを平均化する。その後、ステップ85に進み、平均化した衝突回避ベクトルに基づいて関節の目標回転角の補正量を演算し、この補正量をステップ58で演算された目標回転角に加算する。
【0049】
以上のように構成された本実施形態においては、制御装置14は、リスト作成処理にて、マニピュレータ分割表面と構造物分割表面との組合せをランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける仮想配置のマニピュレータ分割表面と構造物分割表面との重心間距離を演算し、この重心間距離が所定の閾値未満であるかどうか判定することにより衝突の可能性の高いものであるかどうかを判定し、衝突の可能性の高いものと判定した組合せからなる候補リストを作成する。そして、衝突判定処理にて、候補リストの各組合せにおいて仮想配置のマニピュレータ分割表面と構造物分割表面が衝突するかどうかを判定する。これにより、マニピュレータ11と構造物との衝突位置や干渉量を把握するためにマニピュレータ分割表面及び構造物分割表面を小さくとり多数に分割する場合であっても、コントローラ16を操作してから(言い換えれば、マニピュレータ11の手先の目標位置姿勢を入力してから)マニピュレータ11が駆動するまでの制御時間の短縮を図ることができる。すなわち、例えばマニピュレータ分割表面と構造物分割表面との総当たりの組合せにおいて衝突するかどうかを判定する制御方法と比べ、衝突判定処理時間の短縮を図ることができ、ひいては全体の制御時間の短縮を図ることができる。また、例えば全てのマニピュレータ分割表面と構造物分割表面との位置関係から衝突の可能性の高い組合せからなる候補リストを作成する制御方法と比べ、候補リスト作成処理時間の短縮を図ることができ、ひいては全体の制御時間の短縮を図ることができる。したがって、本実施形態においては、マニピュレータ11の手先の目標位置姿勢を指示してから駆動するまでの制御時間の短縮を図りながら、マニピュレータ11と構造物との衝突回避を図ることができる。
【0050】
また、本実施形態においては、制御装置14は、リスト作成処理を所定の時間間隔で繰返し行っており、抽出リストを作成する際に前回作成した候補リストの組合せを加える。これにより、例えば手先の目標位置姿勢や現在位置姿勢及び関節の目標回転角や現在回転角などの変化の有無にかかわらず、時間の経過とともに、候補リストにおける組合せの件数、すなわち衝突判定を行う組合せの件数を増加させることができる。その結果、マニピュレータ11と構造物との衝突回避性を向上させることができる。
【0051】
なお、上記一実施形態においては、マニピュレータ分割表面A1〜Am及び構造物分割表面B1〜Bnはそれぞれ三角形状をなす場合を例にとって説明したが、これに限られず、四角形等の他の形状をなしてもよいし、複数種類の形状が混在してもよい。このような場合も、上記同様の効果を得ることができる。
【0052】
また、上記一実施形態においては、表示装置14は、マニピュレータ11の現在画像及び周囲構造物の現在画像を構築して表示装置15の設定画面若しくは操作画面のマニピュレータ画像表示領域47に表示させる場合を例にとって説明したが、これに限られない。すなわち、例えば原子炉内にマニピュレータ観察用カメラを配置し、このカメラの映像をマニピュレータ画像表示領域47に表示させてもよい。この場合も、上記同様の効果を得ることができる。
【0053】
なお、以上においては、本発明の適用対象として、原子炉内構造物の目視検査作業を目的とし、マニピュレータ11の先端部に目視検査用カメラ10を搭載した原子炉内検査装置を例にとって説明したが、これに限られない。すなわち、原子炉内構造物に発生した欠陥の長さ及び深さを測定する探傷検査作業を目的とし、マニピュレータ11の先端部に渦電流センサ又は超音波センサを搭載した原子炉内検査装置に適用してもよい。また、原子炉内構造物の補修作業を目的とし、マニピュレータ11の先端部に補修器具を搭載した原子炉内補修装置に適用してもよい。また、原子炉以外の狭隘部にてマニピュレータを用いる装置に適用してもよい。その際、原子炉のように水中にてマニピュレータを用いる装置に限られず、気中にてマニピュレータを用いる装置に適用してもよい。これらの場合も、上記同様の効果を得ることができる。
【符号の説明】
【0054】
11 マニピュレータ
14 制御装置
16 コントローラ
18 駆動部
19 リンク
24a,24b モータ
26a,26b エンコーダ
【特許請求の範囲】
【請求項1】
複数の関節を介し連結された複数のリンクからなるマニピュレータに対し、各関節の回転角を制御することにより手先の位置姿勢を制御する制御装置において、
前記マニピュレータに関するデータとして、各リンクの表面及び各関節の表面を多数に分割したマニピュレータ分割表面の形状及びそれらの相対的な位置関係を記憶する第1記憶手段と、
前記マニピュレータの周囲の構造物に関するデータとして、前記構造物の表面を多数に分割した構造物分割表面の形状及びそれらの絶対位置を記憶する第2記憶手段と、
前記マニピュレータの手元の現在位置姿勢を取得する手元現在位置姿勢取得手段と、
前記マニピュレータの手先の目標位置姿勢を入力する手先目標位置姿勢入力手段と、
前記手元現在位置姿勢取得手段で取得された手元の現在位置姿勢及び前記手先目標位置姿勢入力手段で入力された手先の目標位置姿勢に基づき、各関節の目標回転角を演算する関節目標回転角演算手段と、
前記手元現在位置取得手段で取得された手元の現在位置姿勢、前記関節目標回転角演算手段で演算された各関節の目標回転角、並びに前記第1記憶手段で記憶されたデータに基づき、前記手先の目標位置姿勢に対応する前記多数のマニピュレータ分割表面の仮想配置を演算するマニピュレータ分割表面演算手段と、
前記第1記憶手段で記憶された前記多数のマニピュレータ分割表面のうちのいずれか1つと前記第2記憶手段で記憶された前記多数の構造物分割表面のうちのいずれか1つとの組合せを予め設定された所定の件数だけランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける前記仮想配置の前記マニピュレータ分割表面と前記構造物分割表面との重心間距離を演算し、この重心間距離が予め設定された所定の閾値未満であるかどうか判定することにより前記マニピュレータ分割表面と前記構造物分割表面が衝突する可能性の高いものであるかどうかを判定し、衝突する可能性の高いものと判定した組合せからなる候補リストを作成する処理を行うリスト作成手段と、
前記リスト作成手段で作成された候補リストの各組合せにおいて前記仮想配置の前記マニピュレータ分割表面と前記構造物分割表面が衝突するかどうかを判定する衝突判定手段と、
前記衝突判定手段で前記マニピュレータ分割表面と前記構造物分割表面が衝突すると判定された場合に、衝突を回避するように前記関節の目標回転角を補正する関節目標回転角補正手段とを備えたことを特徴とするマニピュレータの制御装置。
【請求項2】
請求項1記載のマニピュレータの制御装置において、
前記リスト作成手段は、
前記処理を予め設定された所定の時間間隔で繰返し行っており、前記抽出リストを作成する際に前回作成した候補リストの組合せを加えることを特徴とするマニピュレータの制御装置。
【請求項3】
請求項1又は2記載のマニピュレータの制御装置において、
前記関節目標回転角補正手段は、
前記衝突判定手段で衝突すると判定された前記仮想配置の前記マニピュレータ分割表面の頂点のうち最も前記構造物の内側に位置するものを選択し、この選択した頂点と前記構造物分割表面との距離以上の大きさを持ちかつ前記構造物分割表面の法線ベクトルと同じであって前記構造物の外側への向きを持つ衝突回避ベクトルを生成する衝突回避ベクトル生成手段と、
前記衝突判定手段で衝突すると判定された前記マニピュレータ分割表面が、前記複数の関節で区分された複数の部位のいずれに含まれるか判別することにより、前記マニピュレータ分割表面に対応する前記衝突回避ベクトルを分類する分類手段と、
前記衝突回避ベクトルを前記部位毎に平均化し、この平均化した衝突回避ベクトルに基づいて前記各関節の目標回転角の補正量を演算する関節目標回転角補正量演算手段とを備えたことを特徴とするマニピュレータの制御装置。
【請求項4】
請求項1〜3のいずれか1項記載のマニピュレータの制御装置において、
前記マニピュレータの各関節の現在回転角を取得する関節現在回転角取得手段と、
前記手元現在位置姿勢取得手段で取得された手元の現在位置姿勢及び前記関節現在回転角取得手段で取得された各関節の現在回転角に基づき、手先の現在位置姿勢を演算する手先現在位置姿勢演算手段とを備え、
前記関節目標回転角演算手段は、
前記手先目標位置姿勢入力手段で入力された手先の目標位置姿勢と前記手先現在位置姿勢演算手段で演算された手先の現在位置姿勢との偏差を演算し、この位置姿勢の偏差に基づき各関節の目標回転角と現在回転角との偏差を演算し、この各関節回転角の偏差を前記関節現在回転角取得手段で取得された各関節の現在回転角に加算して各関節の目標回転角を演算することを特徴とするマニピュレータの制御装置。
【請求項1】
複数の関節を介し連結された複数のリンクからなるマニピュレータに対し、各関節の回転角を制御することにより手先の位置姿勢を制御する制御装置において、
前記マニピュレータに関するデータとして、各リンクの表面及び各関節の表面を多数に分割したマニピュレータ分割表面の形状及びそれらの相対的な位置関係を記憶する第1記憶手段と、
前記マニピュレータの周囲の構造物に関するデータとして、前記構造物の表面を多数に分割した構造物分割表面の形状及びそれらの絶対位置を記憶する第2記憶手段と、
前記マニピュレータの手元の現在位置姿勢を取得する手元現在位置姿勢取得手段と、
前記マニピュレータの手先の目標位置姿勢を入力する手先目標位置姿勢入力手段と、
前記手元現在位置姿勢取得手段で取得された手元の現在位置姿勢及び前記手先目標位置姿勢入力手段で入力された手先の目標位置姿勢に基づき、各関節の目標回転角を演算する関節目標回転角演算手段と、
前記手元現在位置取得手段で取得された手元の現在位置姿勢、前記関節目標回転角演算手段で演算された各関節の目標回転角、並びに前記第1記憶手段で記憶されたデータに基づき、前記手先の目標位置姿勢に対応する前記多数のマニピュレータ分割表面の仮想配置を演算するマニピュレータ分割表面演算手段と、
前記第1記憶手段で記憶された前記多数のマニピュレータ分割表面のうちのいずれか1つと前記第2記憶手段で記憶された前記多数の構造物分割表面のうちのいずれか1つとの組合せを予め設定された所定の件数だけランダムに抽出して抽出リストを作成し、その抽出リストの各組合せにおける前記仮想配置の前記マニピュレータ分割表面と前記構造物分割表面との重心間距離を演算し、この重心間距離が予め設定された所定の閾値未満であるかどうか判定することにより前記マニピュレータ分割表面と前記構造物分割表面が衝突する可能性の高いものであるかどうかを判定し、衝突する可能性の高いものと判定した組合せからなる候補リストを作成する処理を行うリスト作成手段と、
前記リスト作成手段で作成された候補リストの各組合せにおいて前記仮想配置の前記マニピュレータ分割表面と前記構造物分割表面が衝突するかどうかを判定する衝突判定手段と、
前記衝突判定手段で前記マニピュレータ分割表面と前記構造物分割表面が衝突すると判定された場合に、衝突を回避するように前記関節の目標回転角を補正する関節目標回転角補正手段とを備えたことを特徴とするマニピュレータの制御装置。
【請求項2】
請求項1記載のマニピュレータの制御装置において、
前記リスト作成手段は、
前記処理を予め設定された所定の時間間隔で繰返し行っており、前記抽出リストを作成する際に前回作成した候補リストの組合せを加えることを特徴とするマニピュレータの制御装置。
【請求項3】
請求項1又は2記載のマニピュレータの制御装置において、
前記関節目標回転角補正手段は、
前記衝突判定手段で衝突すると判定された前記仮想配置の前記マニピュレータ分割表面の頂点のうち最も前記構造物の内側に位置するものを選択し、この選択した頂点と前記構造物分割表面との距離以上の大きさを持ちかつ前記構造物分割表面の法線ベクトルと同じであって前記構造物の外側への向きを持つ衝突回避ベクトルを生成する衝突回避ベクトル生成手段と、
前記衝突判定手段で衝突すると判定された前記マニピュレータ分割表面が、前記複数の関節で区分された複数の部位のいずれに含まれるか判別することにより、前記マニピュレータ分割表面に対応する前記衝突回避ベクトルを分類する分類手段と、
前記衝突回避ベクトルを前記部位毎に平均化し、この平均化した衝突回避ベクトルに基づいて前記各関節の目標回転角の補正量を演算する関節目標回転角補正量演算手段とを備えたことを特徴とするマニピュレータの制御装置。
【請求項4】
請求項1〜3のいずれか1項記載のマニピュレータの制御装置において、
前記マニピュレータの各関節の現在回転角を取得する関節現在回転角取得手段と、
前記手元現在位置姿勢取得手段で取得された手元の現在位置姿勢及び前記関節現在回転角取得手段で取得された各関節の現在回転角に基づき、手先の現在位置姿勢を演算する手先現在位置姿勢演算手段とを備え、
前記関節目標回転角演算手段は、
前記手先目標位置姿勢入力手段で入力された手先の目標位置姿勢と前記手先現在位置姿勢演算手段で演算された手先の現在位置姿勢との偏差を演算し、この位置姿勢の偏差に基づき各関節の目標回転角と現在回転角との偏差を演算し、この各関節回転角の偏差を前記関節現在回転角取得手段で取得された各関節の現在回転角に加算して各関節の目標回転角を演算することを特徴とするマニピュレータの制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−52498(P2013−52498A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−194167(P2011−194167)
【出願日】平成23年9月6日(2011.9.6)
【出願人】(507250427)日立GEニュークリア・エナジー株式会社 (858)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月6日(2011.9.6)
【出願人】(507250427)日立GEニュークリア・エナジー株式会社 (858)
【Fターム(参考)】
[ Back to top ]