
マニュアルトランスミッションを備えたパワーユニットおよびそれを備えた自動二輪車
【課題】シフトチェンジ時におけるドッグ摩耗の防止やシフトショックの低減を、個々のライダーに応じて実現する。
【解決手段】パワーユニット10は、エンジン12と、シフトドラム27を有するマニュアル式の変速装置13と、シフトドラム27の回転位置を検出するシフトドラムセンサ90と、シフトドラムセンサ90からの信号に基づいてギアポジションを検出し、ギアポジションが変更され始めたことが検出されると、変更が完了するまでエンジン12の回転速度を増加または減少させる制御を実行するECU70と、を備える。
【解決手段】パワーユニット10は、エンジン12と、シフトドラム27を有するマニュアル式の変速装置13と、シフトドラム27の回転位置を検出するシフトドラムセンサ90と、シフトドラムセンサ90からの信号に基づいてギアポジションを検出し、ギアポジションが変更され始めたことが検出されると、変更が完了するまでエンジン12の回転速度を増加または減少させる制御を実行するECU70と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マニュアルトランスミッションを備えたパワーユニットおよびそれを備えた自動二輪車に関する。
【背景技術】
【0002】
自動二輪車のトランスミッション(変速装置)として、ライダーの手動操作によって変速が行われるドッグクラッチ式のマニュアルトランスミッションがよく知られている。また、マニュアルトランスミッションを備えた自動二輪車において、ギアポジションを検出するセンサを備え、シフトアップ時にエンジンの点火装置の点火を間引く制御を行うものが知られている(下記特許文献1参照)。シフトアップ時にこのような制御が実行されることにより、ギアポジションの変更が補助される。
【特許文献1】特開2007−32726号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1に記載された自動二輪車では、シフトアップ時には、点火を間引く制御(以下、点火間引き制御という。)が常に行われる。しかし、マニュアルトランスミッションを備えた自動二輪車では、ギアポジションの変更が良好に行われるか否かは、ライダーの技量に依存する。シフト操作に不慣れなライダー(いわゆる初心者)やシフト操作が不得手なライダーにとっては、上記点火間引き制御が実行されることにより、ギアポジションの変更が容易になる。しかし、シフト操作が得意なライダーにとっては、上記点火間引き制御が必要でない場合が多い。すなわち、上記自動二輪車では、シフトアップ時に不必要な点火間引き制御が実行されることがある。
【0004】
また、上記特許文献1に記載された自動二輪車では、点火間引き制御は、ライダーによるシフトアップ操作が開始されてから一定時間行われる。ところが、点火間引き制御が必要となる時間は、ライダーのシフト操作の技量に依存する。したがって、ライダーの技量の個人差とは無関係に一律に点火間引き制御を実行したのでは、ライダーによっては、点火間引き制御が不必要な時期まで継続されてしまったり、逆に、依然として必要であるにも拘わらず点火間引き制御が早く終了してしまうおそれがある。
【0005】
本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、シフトチェンジ時におけるドッグ摩耗の防止やシフトショックの低減を、個々のライダーに応じて実現することである。
【課題を解決するための手段】
【0006】
本発明に係るパワーユニットは、エンジンと、シフトドラムを有するドッグクラッチ式のマニュアルトランスミッションと、前記シフトドラムの回転位置を検出するシフトドラムセンサと、前記シフトドラムセンサからの信号に基づいてギアポジションを検出し、ギアポジションが変更され始めたことが検出されると、変更が完了するまで前記エンジンの回転速度を増加または減少させる制御を実行する制御装置と、を備えたものである。
【発明の効果】
【0007】
本発明によれば、マニュアルトランスミッションを備えたパワーユニットにおいて、シフトチェンジ時に、個々のライダーに応じて、ドッグ摩耗の防止やシフトショックの低減を図ることができる。
【発明を実施するための最良の形態】
【0008】
《実施形態1》
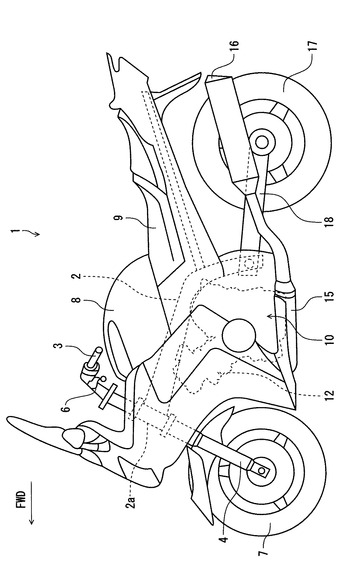
図1は、自動二輪車1の左側面図である。まず、図1を参照しながら、自動二輪車1の概略構成について説明する。なお、以下の説明において、前後左右の方向は、シート9に着座した乗員から視た方向をいうものとする。
【0009】
自動二輪車1は、車体フレーム2を備えている。車体フレーム2は、ヘッドパイプ2aを有している。ヘッドパイプ2aの上端部には、ハンドル3が設けられている。ヘッドパイプ2aの下端部には、フロントフォーク4を介して前輪7が回転自在に取り付けられている。ハンドル3の左側部には、クラッチレバー6が設けられている。後述するエンジン12の上方には、燃料タンク8が設けられている。燃料タンク8の後側には、シート9が設けられている。
【0010】
車体フレーム2の後端部には、スイングアーム18が揺動可能に取り付けられている。スイングアーム18の後端部には、後輪17が回転可能に取り付けられている。
【0011】
車体フレーム2には、駆動源としてのエンジン12を備えたパワーユニット10が懸架されている。パワーユニット10は、エンジン12と、後述するクラッチ14と変速装置13とを有している。パワーユニット10は、図示しない動力伝達機構を介して後輪17に接続されている。前記動力伝達機構は、チェーンやベルト、ドライブシャフト等により構成されている。これにより、パワーユニット10内において生じるエンジン12による駆動力は、前記動力伝達機構によって後輪17に伝えられる。また、エンジン12にて発生する排ガスは、排気管15を通って大気中へ排出される。排気管15の後端の少なくとも一部は、サイレンサ16に覆われている。
【0012】
エンジン12は、ガソリンを燃料とするエンジンである。エンジン12のその他の型式等は特に限定されない。エンジン12は、多気筒エンジンであっても短気筒エンジンであってもよい。また、エンジン12のシリンダの配列および方向は限定されない。
【0013】
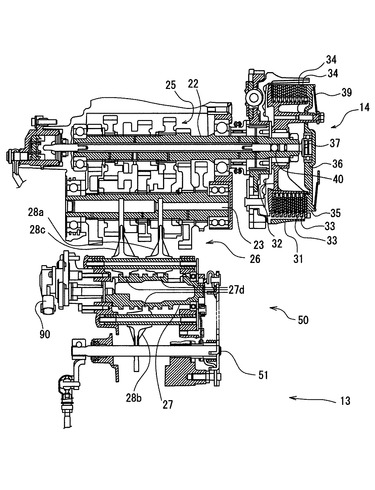
図2に示すとおり、本実施形態では、クラッチ14は多板摩擦クラッチである。クラッチ14は、筒状のクラッチハウジング31と、筒状のクラッチボス32と、摩擦板である複数のフリクションプレート33およびクラッチプレート34と、プレッシャプレート35とを備えている。なお、クラッチ14は本実施形態に使用されるものとして一例であり、クラッチ14は多板式クラッチに限定されない。クラッチ14は、単板式クラッチであってもよい。また、クラッチ14は、湿式または乾式のいずれであってもよい。
【0014】
パワーユニット10は、メイン軸22を有している。クラッチハウジング31は筒状に形成されており、メイン軸22に相対回転可能に取り付けられている。クラッチボス32は筒状に形成されており、クラッチハウジング31よりもメイン軸22の径方向内側に配置されている。また、クラッチボス32は、メイン軸22に相対回転不能に取り付けられている。各フリクションプレート33は、クラッチハウジング31に対して、メイン軸22の軸方向に摺動可能に取り付けられている。また、各クラッチプレート34は、クラッチボス32に対して、メイン軸22の軸方向に摺動可能に取り付けられている。各フリクションプレート33と各クラッチプレート34とは、メイン軸22の軸方向に交互に配置されている。
【0015】
プレッシャプレート35は、略円盤形状に形成されており、メイン軸22の軸方向に摺動可能にクラッチボス32に設けられている。ただし、プレッシャプレート35は、メイン軸22の軸方向に摺動可能にクラッチハウジング31に設けられていてもよい。また、プレッシャプレート35は、筒状のメイン軸22内に配置されたプッシュロッド37の一端部(図2の右側)に取り付けられている。プレッシャプレート35は、例えば、玉軸受等の軸受36を介してプッシュロッド37に取り付けられている。この場合、プレッシャプレート35は、メイン軸22に対して回転自在である。また、プッシュロッド37は、図示しないクラッチレリーズ機構を介してクラッチレバー6(図1参照)と接続している。
【0016】
クラッチ14は、皿バネ39を有している。皿バネ39は、メイン軸22の軸方向に関して、プレッシャプレート35をフリクションプレート33とクラッチプレート34とが接触する方向に付勢している。そのため、フリクションプレート33とクラッチプレート34とは互いに接触する。これにより、メイン軸22は、エンジン12のクランク軸(図示せず)の回転に基づいて回転する。
【0017】
フリクションプレート33とクラッチプレート34との接触は、プッシュロッド37の作動により解消される。プッシュロッド37は、クラッチレバー6(図1参照)の操作に基づき作動する。プッシュロッド37がメイン軸22の軸方向を図2の左側から右側に向かって作動すると、プレッシャプレート35がメイン軸22の軸方向を図2の左側から右側に向かって移動する。これにより、フリクションプレート33とクラッチプレート34との接触が解消される。このとき、プッシュロッド37は、皿バネ39の付勢力よりも大きな力をクラッチレバー6等から受ける。フリクションプレート33とクラッチプレート34との接触が解消されると、クラッチ14は、エンジン12の駆動力の伝達が遮断される。
【0018】
変速装置13は、メイン軸22と、ドライブ軸23と、シフトドラム27とを備えている。メイン軸22は、クラッチ14を介してエンジン12のクランク軸(図示せず)に接続されている。メイン軸22とドライブ軸23とは、略平行に配置されている。
【0019】
変速装置13は、いわゆる常時噛合式ドッグトランスミッションである。メイン軸22には、複数の変速ギア25が装着されている。一方、ドライブ軸23には、複数の変速ギア25に対応する複数の変速ギア26が装着されている。複数の変速ギア25と複数の変速ギア26とは、選択された一対のギア同士のみで相互に噛合している。複数の変速ギア25のうち、選択された変速ギア25以外の変速ギア25と、複数の変速ギア26のうち、選択された変速ギア26以外の変速ギア26とのうちの少なくとも一方は、メイン軸22もしくはドライブ軸23に対して回転可能となっている。つまり、選択されていない変速ギア25と、選択されていない変速ギア26のうちの少なくとも一方は、メイン軸22もしくはドライブ軸23に対して空転するようになっている。すなわち、メイン軸22とドライブ軸23との間の回転伝達は、相互に噛合する、選択された変速ギア25および選択された変速ギア26のみを介して行われる。
【0020】
図2に示すように、変速ギア25および変速ギア26の選択は、シフトドラム27によって選択される。シフトドラム27の外周面には、複数のカム溝27dが形成されている。本実施形態において、前記複数のカム溝27dは、シフトドラム27において三つ設けられている。前記三つのカム溝27dには、それぞれシフトフォーク28a,28b,28cが装着されている。各シフトフォークは、それぞれメイン軸22およびドライブ軸23の変速ギア25および26に係合している。
【0021】
また、変速ギア25および変速ギア26は、所定のドッグを形成している。シフトドラム27が回転することによって、複数のシフトフォーク28a,28b,28cは、それぞれが装着しているカム溝27dに案内されてメイン軸22もしくはドライブ軸23の外周を円周方向および軸方向に移動する。複数のシフトフォーク28a,28b,28cのそれぞれは、メイン軸22もしくはドライブ軸23の軸方向を移動することにより、変速ギア25および変速ギア26において、前記ドッグの係合および切断を行う。これにより、変速ギア25および変速ギア26のうちの相互に噛合する固定ギアと摺動ギアとが選択される。複数の変速ギア25および変速ギア26のうち、シフトドラム27の回転位置に応じた位置の変速ギア25と変速ギア26との一対のみが、メイン軸22およびドライブ軸23に対して、それぞれドッグを介してスプラインによる固定状態となる。これにより、変速装置13は、ギアポジションが決定され、変速ギア25および変速ギア26を介して、メイン軸22とドライブ軸23との間で所定の変速比で回転伝達が行われる。なお、シフトドラム27は、シフトアップ時とシフトダウン時とで回転方向が異なる。
【0022】
変速装置13は、所謂マニュアル式変速装置である。つまり、変速装置13は、自動二輪車1に乗車するライダーの操作によりギアポジションが変更される。シフトドラム27は、シフト機構50を介して図示しないシフトペダルに接続されている。シフト機構50は、シフトシャフト51を有している。前記シフトペダルは、シフトシャフト51に取り付けられ、自動二輪車1においてパワーユニット10の外部に設けられている。シフトシャフト51は、前記シフトペダルが操作されることで軸円周方向に回転する。シフトシャフト51の前記回転により、シフトドラム27はシフト機構50を介して回転する。
【0023】
以上のように、変速装置13は、シフトドラム27の回転によりギアポジションが変更される。各ギアポジションの位置は、シフトドラム27において、シフトドラム27の軸外周を円周方向に沿ってギアポジションごとに所定の角度で設定されている。そのため、シフトドラム27の回転位置を知ることで、変速装置13の現在のギアポジションを知ることができる。なお、変速装置13は、最高段と最低段とが連続しているロータリー式のトランスミッションであってもよく、最高段と最低段とが連続していないリターン式のトランスミッションのいずれであってもよい。
【0024】
変速装置13には、シフトドラムセンサ90が設けられている。シフトドラムセンサ90の形態は、シフトドラム27の回転角度または回転位置を検出するものであれば、特に限定されない。シフトドラムセンサ90は、例えば、電位式、光学式、電磁式、または、半導体式を利用したもの、もしくは前記いずれかの組み合わせであってよい。ただし、本実施形態では、シフトドラムセンサ90には、ポテンショメータを用いている。後述するECU70は、シフトドラムセンサ90がシフトドラム27の回転角度または回転位置を検出することにより、前記回転位置ごとに対応した値を検知することができる。
【0025】
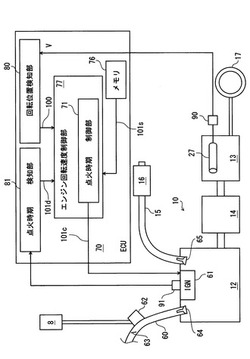
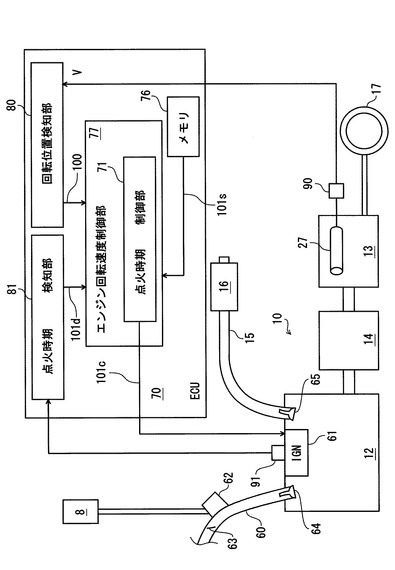
図4等に示すように、パワーユニット10は、吸気管60および排気管15を有している。吸気管60は、エンジン12と接続している。また、排気管15は、吸気管60が接続する位置と異なる位置において、エンジン12と接続している。吸気管60の内部には、スロットル弁63が設けられている。スロットル弁63は、吸気管60を流れる空気の量や速度を調整する。また、吸気管60の中途には、燃料供給装置62が設けられている。燃料供給装置62は、所謂気化器であっても燃料噴射装置であってもよい。さらに、エンジン12は、吸気バルブ64と排気バルブ65と点火装置61とを有している。本実施形態において、点火装置61は、電子的に点火時期が制御される。
【0026】
自動二輪車1は、制御装置としてのECU70を備えている。ECU70は、シフトドラム27の回転位置を検知する回転位置検知部80を有している。また、ECU70は、エンジン12の回転速度を制御するエンジン回転速度制御部77を有している。エンジン回転速度制御部77は、以下の点火時期制御部71を有している。また、ECU70は、メモリ76を有している。メモリ76は、自動二輪車1の走行時または自動二輪車1に乗車するライダーに対して必要なデータを記憶している。
【0027】
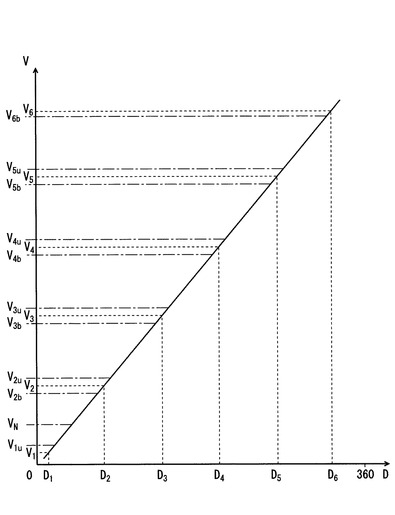
回転位置検知部80は、シフトドラムセンサ90により検出されるシフトドラム27の回転位置を電圧値もしくは抵抗値として入力し検知する。図3に示すように、ECU70には、シフトドラム27の回転位置に応じた電圧値もしくは抵抗値が設定されている。図3では、電圧値Vのみを縦軸に示している。前述したように、各ギアポジションの位置は、ギアポジションごとにシフトドラム27の所定の回転位置で設定されている。そのため、各ギアポジションの位置は、それぞれ所定の電圧値Vもしくは抵抗値Rとして示される。図3は、変速装置13が6速トランスミッションである場合の電圧値Vとシフトドラム27の原点からの回転位置Dとを示している。前記回転位置Dの単位は、例えばdegで表される。前記原点は、シフトドラム27の軸外円周において、第6速と第1速との間の所定の点が設定される。
【0028】
変速装置13における第1速は、シフトドラム27の回転位置Dとして回転位置D1が設定されている。また、シフトドラム27の回転位置D1は、所定の電圧値として1速電圧値V1が設定されている。すなわち、変速装置13において第1速のギアポジションであるとき、回転位置検知部80は1速電圧値V1を入力する。同様にして、変速装置13における第2速、第3速、…、第6速は、シフトドラム27の回転位置Dとして回転位置D2、D3、…、D6が設定されている。また、シフトドラム27の回転位置D2、D3、…、D6は、所定の電圧値Vとして2速電圧値V2、3速電圧値V3、…、6速電圧値V6が設定されている。これにより、回転位置検知部80は、変速装置13のギアポジションごとに応じた電圧値Vまたは抵抗値Rを入力する。つまり、変速装置13において各ギアポジションのドッグ噛み合い状態であるとき、回転位置検知部80は、変速装置13のギアポジションごとに応じた所定の電圧値Vまたは抵抗値Rを入力する。
【0029】
なお、変速装置13の変速段数は6段に限定されない。変速装置13は、有段式のトランスミッションであり、複数の変数段数を有してればよい。
【0030】
ECU70は、変速装置13においてギアポジションを変更する作動が開始される際、シフトアップもしくはシフトダウンが判別できるようになっている。図3に示すように、5速電圧値V5から見て、5速電圧値V5よりも高いシフトアップ電圧値V5uと、5速電圧値V5よりも低いシフトダウン電圧値V5bとが設定されている。また、変速装置13における第2速、第3速、および第4速のギアポジションの場合、それぞれシフトアップ電圧値V2uとシフトダウン電圧値V2b、シフトアップ電圧値V3uとシフトダウン電圧値V3b、およびシフトアップ電圧値V4uとシフトダウン電圧値V4b、とが設定されている。一方、変速装置13の最低段である第1速のギアポジションの場合、少なくとも1速電圧値V1よりも高いシフトアップ電圧値V1uが設定されている。変速装置13の最高段である第6速のギアポジションの場合、少なくとも6速電圧値V6よりも低いシフトダウン電圧値V6bが設定されている。
【0031】
ここで、任意のギアポジション(第m速と表記する)のm速電圧値Vmとシフトアップ電圧値Vmuとの差とm速電圧値Vmとシフトダウン電圧値Vmbとの差とは、隣り合う二つのシフトアップ電圧値V(m−1)uとシフトダウン電圧値Vmbの差よりも絶対値が小さい。すなわち、例として、第4速と第5速との間においては、|V5−V5b|<|V5b−V4u|、および、|V4u−V4|<|V5b−V4u|の関係が成立している。なお、電圧値Vとシフトドラム27の回転位置Dとは、図3に示すように比例関係に限定されず、右下がりに描かれる反比例関係であってもよい。
【0032】
変速装置13においてm速のギアポジションから高段側へ変更する作動が開始される際、m速電圧値Vmからシフトアップ電圧値Vmuに向かって電圧値Vが変化する。続いて、シフトアップ電圧値Vmuを超えて変化するとシフトアップの作動が開始されていると判定される。逆に、変速装置13においてm速のギアポジションから低段側へ変更する作動が開始される際、m速電圧値Vmからシフトダウン電圧値Vmbに向かって電圧値Vが変化する。続いて、シフトダウン電圧値Vmbを超えて変化するとシフトダウンの作動が開始されていると判定される。ECU70は、ギアポジションが変更され始めたことが検出されると、変更が完了するまでエンジン12の回転速度を増加または減少させる制御を実行する。なお、シフトアップの作動が開始されているとの判定は、シフトアップ電圧値Vmuを超えなくともシフトアップ電圧値Vmuと一致したときであってもよい。シフトダウンの作動が開始されているとの判定は、シフトダウン電圧値Vmbを超えなくともシフトダウン電圧値Vmbと一致したときであってもよい。
【0033】
また、変速装置13のニュートラル位置でのニュートラル電圧値VNが、任意の隣り合うギアポジションの間で設定されている。変速装置13のニュートラル位置がシフトドラム27において第1速と第2速との間に設けられている場合、図3に示すようにニュートラル電圧値VNは1速電圧値V1と2速電圧値V2との間で設定される。この場合、第1速から第2速へシフトアップが開始されているか否かの判定は、1速電圧値V1からシフトアップ電圧値V1uに向かって電圧値Vが変化した後、シフトアップ電圧値V1uを超え、さらにニュートラル電圧値VNを超えて変化すると第2速へシフトアップが開始されていると判定される。一方、第2速から第1速へシフトダウンが開始されているか否かの判定は、2速電圧値V2からシフトダウン電圧値V2bに向かって電圧値Vが変化した後、シフトダウン電圧値V2bを超え、さらにニュートラル電圧値VNを超えて変化すると第1速へシフトダウンが開始されていると判定される。もしくは、ニュートラル位置がシフトドラム27において第1速と第2速との間に設けられている場合、第1速と第2速との間のシフト操作の際に限り、ECU70は、エンジン12の回転速度を増加または減少させる制御を実行しないことにしてもよい。すなわち、シフトアップ電圧値V1u、ニュートラル電圧値VN、およびシフトダウン電圧値V2bが設定されていなくてもよい。また、ニュートラル位置がシフトドラム27において第1速と第2速との間に設けられている場合、第1速と第2速との間のシフトダウンの際に限り、ECU70は、エンジン12の回転速度を増加させる制御を実行しないことにしてもよい。また、第1速と第2速との間のシフトアップの際に限り、ECU70は、エンジン12の回転速度を減少させる制御を実行しないことにしてもよい。
【0034】
回転位置検知部80は、入力した電圧値Vに基づき、回転位置信号100をエンジン回転速度制御部77に出力する。エンジン回転速度制御部77は、入力した回転位置信号100に基づき、エンジン12のエンジン回転速度を増加または減少させる制御を実行する。
【0035】
自動二輪車1は点火センサ91を備え、ECU70は点火時期検知部81を有している。点火センサ91は、点火装置61における点火時期を検出する。点火時期検知部81は、点火センサ91にて検出される点火装置61の点火時期に基づく信号を入力し検知する。点火時期制御部71は、点火時期検知部81より実点火時期信号101dを入力する。メモリ76は、エンジン回転速度や実点火時期信号101dに対応した目標点火時期を記憶している。そのため、点火時期制御部71は、メモリ76より目標点火時期信号101sを入力する。さらに、点火時期制御部71は、回転位置検知部80より回転位置信号100を入力する。点火時期制御部71は、入力した実点火時期信号101d、目標点火時期信号101s、および、回転位置信号100に基づいて必要な点火時期を算出または択出する。点火装置61は、算出または択出された点火時期に基づく点火時期制御信号101cを入力する。点火装置61は、点火時期制御信号101cに基づき点火時期が制御される。これにより、エンジン12のエンジン回転速度が減少する。このとき、ECU70は、ギアポジション変更後のエンジン回転速度が所定のエンジン回転速度Rとなるように制御する。
【0036】
所定のエンジン回転速度Rは、例えば変速装置13のギアポジションごとに異なっている。また、所定のエンジン回転速度Rは、エンジン12の運転状態や自動二輪車1の走行状態により異なっている。例えば、エンジン回転速度センサがエンジン12に設けられている。この場合、所定のエンジン回転速度Rは、ギアポジション変更後の変速装置13の変速比と前記エンジン回転速度センサにて検出されるエンジン回転速度とからECU70において算出される。また、例えば、自動二輪車1には、車速センサが設けられている。この場合、所定のエンジン回転速度Rは、ギアポジション変更後の変速装置13の変速比と前記エンジン回転速度センサにて検出されるエンジン回転速度と前記車速センサにて検出される車速とからECU70において算出される。
【0037】
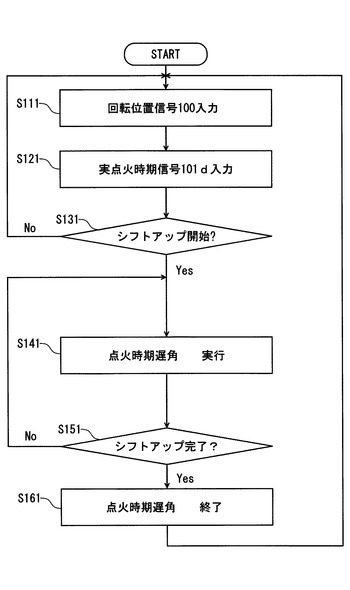
図5は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を減少させるため、点火装置61の点火時期を遅角させる制御を実行する。
【0038】
まず、ステップS111では、点火時期制御部71は、回転位置信号100を入力する。また、ステップS121では、点火時期制御部71は、実点火時期信号101dを入力する。これにより、点火時期制御部71は、変速装置13における現在のギアポジションと、点火装置61における現在の点火時期と、を検知することができる。なお、ステップS111とステップS121とは、ステップの順序が入れ替わっていてもよく、同時であってもよい。
【0039】
ステップS111およびステップS121に続き、ステップS131では、変速装置13がシフトアップの作動を開始しているか否かが判定される。ステップS131において、変速装置13がシフトアップの作動を開始している場合、ステップS141へ進む。ステップS131において、変速装置13がシフトアップの作動を開始していない場合、ステップS111へ戻る。
【0040】
ステップS141では、点火装置61は、点火時期の遅角を実行する。すなわち、点火時期制御部71は、メモリ76より目標点火時期信号101sを入力する。点火時期制御部71は、目標点火時期信号101sに基づく必要な点火時期を算出または択出する。点火装置61は、算出または択出された点火時期に基づく点火時期制御信号101cを入力する。点火装置61では、入力した点火時期制御信号101cに基づき点火時期が遅角される。
【0041】
続いて、ステップS151では、変速装置13がシフトアップの作動を完了しているか否かが判定される。ステップS151において、変速装置13がシフトアップの作動を完了している場合、ステップS111へ戻る。ステップS151において、変速装置13がシフトアップの作動を実施していない場合、ステップS141へ戻る。つまり、ステップS141の制御は、変速装置13がシフトアップの作動を完了するまで実行される。
【0042】
以上のように、点火時期制御部71は、変速装置13がシフトアップの作動を開始すると、シフトアップの作動が完了するまで点火装置61の点火時期を遅角させる制御を実行する。これにより、ECU70は、エンジン12のエンジン回転速度を減少させることができる。
【0043】
(作用および効果)
本実施形態において、パワーユニット10は、エンジン12と、シフトドラム27を有するドッグクラッチ式の変速装置13と、シフトドラム27の回転位置を検出するシフトドラムセンサ90と、ECU70と、を備えている。ECU70は、シフトドラムセンサ90からの信号に基づいて変速装置13におけるギアポジションを検出する。また、ECU70は、ギアポジションが変更され始めたことが検出されると、変更が完了するまでエンジン12のエンジン回転速度を増加または減少させる制御を実行する。これにより、パワーユニット10は、ギアポジション変更の作動状態に応じ、適正なエンジン回転速度を得ることができる。パワーユニット10は、適正なエンジン回転速度を得ることにより、ギアポジション変更の作動時にドッグ摩耗の防止やシフトショックの低減を図ることができる。
【0044】
ECU70は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる。本実施形態において、エンジン12は、点火装置61を有している。そのため、ECU70は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで点火装置61の点火時期を遅角させる。これにより、パワーユニット10は、前述した効果を確実に得ることができる。
【0045】
《実施形態2》
前記実施形態では、ECU70は、変速装置13のシフトアップの作動時に点火時期制御部71による点火遅角が実行することでエンジン回転速度を減少させていた。しかし、ECU70は、エンジン12へ供給される燃料噴射量を減少させることでエンジン回転速度を減少させることができる。以下では、ECU70がエンジン12へ供給される燃料噴射量を減少させる制御について説明する。なお、前記実施形態と同様の機能を有する構成要件等については同符号を付し、説明を省略する。
【0046】
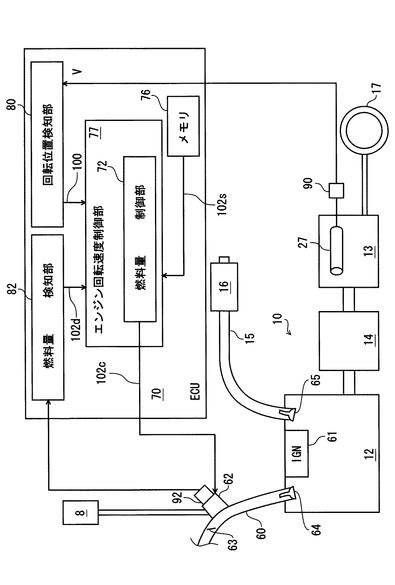
図6に示すように、エンジン12は、吸気バルブ64と排気バルブ65と点火装置61とを有している。また、吸気管60の中途には、燃料供給装置62が設けられている。本実施形態において、燃料供給装置62は、電子的に燃料噴射量が制御される燃料噴射装置である。
【0047】
自動二輪車1は燃料量センサ92を備え、ECU70は燃料量検知部82を有している。燃料量センサ92は、燃料供給装置62における燃料噴射量を検出する。燃料量検知部82は、燃料量センサ92にて検出される燃料供給装置62の燃料噴射量に基づく信号を入力し検知する。エンジン回転速度制御部77は、燃料量制御部72を有している。燃料量制御部72は、燃料量検知部82より実燃料噴射量信号102dを入力する。メモリ76は、エンジン回転速度や実燃料噴射量信号102dに対応した目標燃料噴射量を記憶している。そのため、燃料量制御部72は、メモリ76より目標燃料噴射量信号102sを入力する。さらに、燃料量制御部72は、回転位置検知部80より回転位置信号100を入力する。燃料量制御部72は、入力した実燃料噴射量信号102d、目標燃料噴射量信号102s、および、回転位置信号100に基づいて必要な燃料噴射量を算出または択出する。燃料供給装置62は、算出または択出された燃料噴射量に基づく燃料噴射量制御信号102cを入力する。燃料供給装置62は、燃料噴射量制御信号102cに基づき燃料噴射量が制御される。これにより、エンジン12のエンジン回転速度が減少する。このとき、エンジン回転速度が、所定のエンジン回転速度Rとなるように制御することにしてもよい。
【0048】
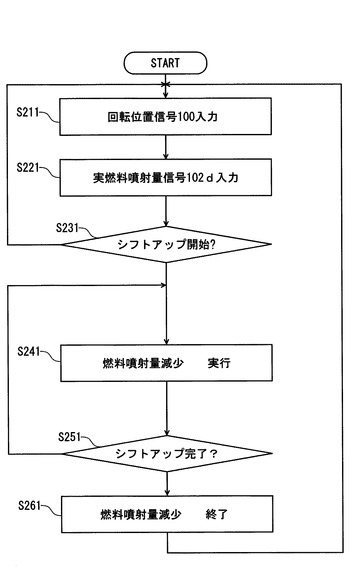
図7は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を減少させるため、燃料供給装置62の燃料噴射量を減少させる制御を実行する。
【0049】
まず、ステップS211では、燃料量制御部72は、回転位置信号100を入力する。また、ステップS221では、燃料量制御部72は、実燃料噴射量信号102dを入力する。これにより、燃料量制御部72は、変速装置13における現在のギアポジションと、燃料供給装置62における現在の燃料噴射量と、を検知することができる。なお、ステップS211とステップS221とは、ステップの順序が入れ替わっていてもよく、同時であってもよい。
【0050】
ステップS211およびステップS221に続き、ステップS231では、変速装置13がシフトアップの作動を開始しているか否かが判定される。ステップS231において、変速装置13がシフトアップの作動を開始している場合、ステップS241へ進む。ステップS231において、変速装置13がシフトアップの作動を開始していない場合、ステップS211へ戻る。
【0051】
ステップS241では、燃料供給装置62は、燃料噴射量を減少させる。すなわち、燃料量制御部72は、メモリ76より目標燃料噴射量信号102sを入力する。燃料量制御部72は、目標燃料噴射量信号102sに基づく必要な燃料噴射量を算出または択出する。燃料供給装置62は、算出または択出された燃料噴射量に基づく燃料噴射量制御信号102cを入力する。燃料供給装置62では、入力した燃料噴射量制御信号102cに基づき燃料噴射量を減少させる。
【0052】
続いて、ステップS251では、変速装置13がシフトアップの作動を完了しているか否かが判定される。ステップS251において、変速装置13がシフトアップの作動を完了している場合、ステップS211へ戻る。ステップS251において、変速装置13がシフトアップの作動を実施していない場合、ステップS241へ戻る。つまり、ステップS241の制御は、変速装置13がシフトアップの作動を完了するまで実行される。
【0053】
以上のように、燃料量制御部72は、変速装置13がシフトアップの作動を開始すると、シフトアップの作動が完了するまで燃料供給装置62が噴射する燃料量を減少させる制御を実行する。これにより、ECU70は、エンジン12のエンジン回転速度を減少させることができる。
【0054】
《実施形態3》
本実施形態では、ECU70は、エンジン12へ供給される空気量を減少させることでエンジン回転速度を減少させることができる。以下では、ECU70がエンジン12へ供給される空気量を減少させる制御について説明する。なお、前記各実施形態と同様の機能を有する構成要件等については同符号を付し、説明を省略する。
【0055】
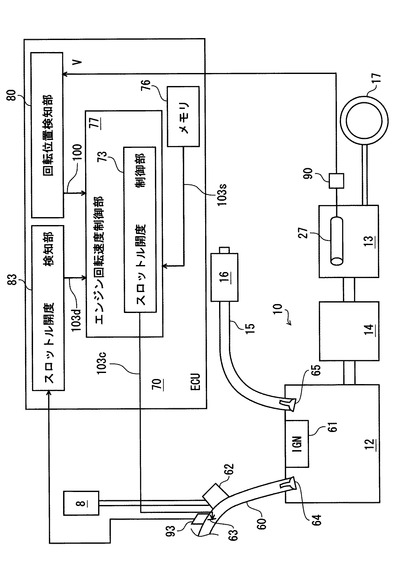
図8に示すように、エンジン12は、吸気バルブ64と排気バルブ65と点火装置61とを有している。また、吸気管60の内部には、スロットル弁63が設けられている。本実施形態において、スロットル弁63は、電子的に開度が制御される。
【0056】
自動二輪車1はスロットル開度センサ93を備え、ECU70はスロットル開度検知部83を有している。スロットル開度センサ93は、スロットル弁63における開度を検出する。スロットル開度検知部83は、スロットル開度センサ93にて検出されるスロットル弁63の開度に基づく信号を入力し検知する。エンジン回転速度制御部77は、スロットル開度制御部73を有している。スロットル開度制御部73は、スロットル開度検知部83より実開度信号103dを入力する。メモリ76は、エンジン回転速度や実開度信号103dに対応した目標スロットル開度を記憶している。そのため、スロットル開度制御部73は、メモリ76より目標開度信号103sを入力する。さらに、スロットル開度制御部73は、回転位置検知部80より回転位置信号100を入力する。スロットル開度制御部73は、入力した実開度信号103d、目標開度信号103s、および、回転位置信号100に基づいて必要なスロットル開度を算出または択出する。スロットル弁63は、算出または択出されたスロットル開度に基づく開度制御信号103cを入力する。スロットル弁63は、開度制御信号103cに基づき開度が制御される。これにより、エンジン12のエンジン回転速度が増加または減少する。このとき、エンジン回転速度が、所定のエンジン回転速度Rとなるように制御することにしてもよい。
【0057】
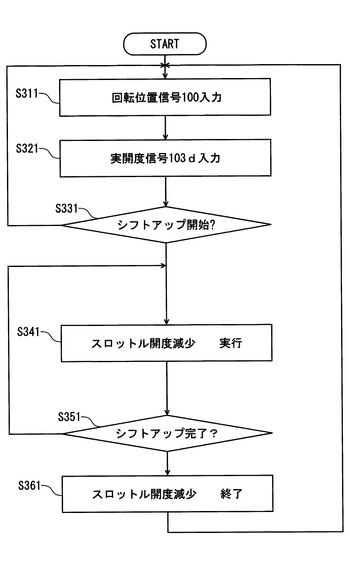
図9は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を減少させるため、スロットル弁63の開度を減少させる制御を実行する。
【0058】
まず、ステップS311では、スロットル開度制御部73は、回転位置信号100を入力する。また、ステップS321では、スロットル開度制御部73は、実開度信号103dを入力する。これにより、スロットル開度制御部73は、変速装置13における現在のギアポジションと、スロットル弁63における現在の開度と、を検知することができる。なお、ステップS311とステップS321とは、ステップの順序が入れ替わっていてもよく、同時であってもよい。
【0059】
ステップS311およびステップS321に続き、ステップS331では、変速装置13がシフトアップの作動を開始しているか否かが判定される。ステップS331において、変速装置13がシフトアップの作動を開始している場合、ステップS341へ進む。ステップS331において、変速装置13がシフトアップの作動を開始していない場合、ステップS311へ戻る。
【0060】
ステップS341では、スロットル弁63は、スロットル開度を減少させる。すなわち、スロットル開度制御部73は、メモリ76より目標開度信号103sを入力する。スロットル開度制御部73は、目標開度信号103sに基づく必要な開度を算出または択出する。スロットル弁63は、算出または択出された開度に基づく開度制御信号103cを入力する。スロットル弁63では、入力した開度制御信号103cに基づき開度を減少させる。
【0061】
続いて、ステップS351では、変速装置13がシフトアップの作動を完了しているか否かが判定される。ステップS351において、変速装置13がシフトアップの作動を完了している場合、ステップS311へ戻る。ステップS351において、変速装置13がシフトアップの作動を実施していない場合、ステップS341へ戻る。つまり、ステップS341の制御は、変速装置13がシフトアップの作動を完了するまで実行される。
【0062】
以上のように、スロットル開度制御部73は、変速装置13がシフトアップの作動を開始すると、シフトアップの作動が完了するまでスロットル弁63の開度を減少させる制御を実行する。スロットル弁63の開度が減少すると、エンジン12の内部へ供給される空気量と燃料量が減少する。これにより、ECU70は、エンジン12のエンジン回転速度を減少させることができる。
【0063】
ECU70は、エンジン12へ供給される空気量を増加させることでエンジン回転速度を増加させることができる。以下では、ECU70がエンジン12へ供給される空気量を増加させる制御について説明する。なお、以下の制御フローの説明において、図9とステップの番号のみが異なる場合、説明を省略する。
【0064】
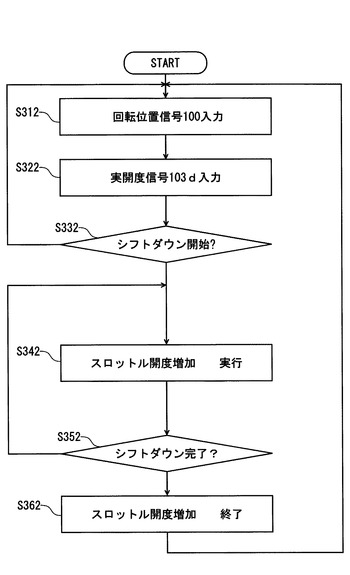
図10は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を増加させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を増加させるため、スロットル弁63の開度を増加させる制御を実行する。
【0065】
ステップS312およびステップS322に続き、ステップS332では、変速装置13がシフトダウンの作動を開始しているか否かが判定される。ステップS332において、変速装置13がシフトダウンの作動を開始している場合、ステップS342へ進む。ステップS332において、変速装置13がシフトダウンの作動を開始していない場合、ステップS312へ戻る。
【0066】
ステップS342では、スロットル弁63は、スロットル開度を増加させる。すなわち、スロットル開度制御部73は、メモリ76より目標開度信号103sを入力する。スロットル開度制御部73は、目標開度信号103sに基づく必要な開度を算出または択出する。スロットル弁63は、算出または択出された開度に基づく開度制御信号103cを入力する。スロットル弁63では、入力した開度制御信号103cに基づき開度を増加させる。
【0067】
続いて、ステップS352では、変速装置13がシフトダウンの作動を完了しているか否かが判定される。ステップS352において、変速装置13がシフトアップの作動を完了している場合、ステップS312へ戻る。ステップS352において、変速装置13がシフトアップの作動を実施していない場合、ステップS342へ戻る。つまり、ステップS342の制御は、変速装置13がシフトダウンの作動を完了するまで実行される。
【0068】
以上のように、スロットル開度制御部73は、変速装置13がシフトダウンの作動を開始すると、シフトダウンの作動が完了するまでスロットル弁63の開度を増加させる制御を実行する。スロットル弁63の開度が増加すると、エンジン12の内部へ供給される空気量と燃料量が増加する。これにより、ECU70は、エンジン12のエンジン回転速度を増加させることができる。
【0069】
ECU70は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を増加させる。本実施形態において、パワーユニット10は、スロットル弁63を有している。そのため、ECU70は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでスロットル弁63の開度を増加させる。これにより、パワーユニット10は、前述した効果を確実に得ることができる。
【0070】
《実施形態4》
本実施形態では、ECU70は、エンジン12へ流入する空気量を減少させることでエンジン回転速度を減少させることができる。以下では、ECU70がエンジン12へ流入する空気量を減少させる制御について説明する。なお、前記各実施形態と同様の機能を有する構成要件等については同符号を付し、説明を省略する。
【0071】
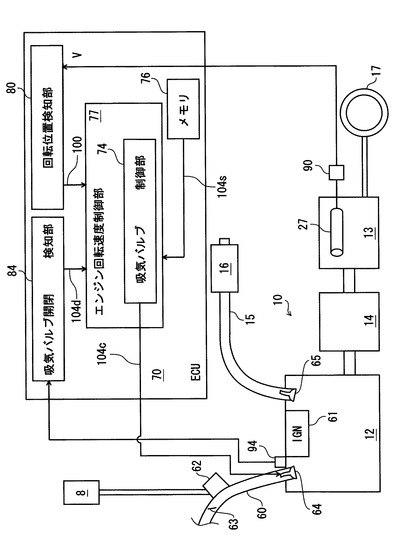
図11に示すように、エンジン12は、吸気バルブ64と排気バルブ65と点火装置61とを有している。本実施形態に係る吸気バルブ64は、少なくとも開閉時間が変更自在である。吸気バルブ64は、一定のリフト量に対しリフト速度が変化することで、開閉時間が変更されるようにしてもよい。また、吸気バルブ64は、一定のリフト速度に対しリフト量が変化することで、開閉時間が変更されるようにしてもよい。吸気バルブ64は、以下のように、ECU70により電子制御式に開閉時間が変更される。ただし、吸気バルブ64は、吸気バルブ64を作動させる吸気カム等の機構により、エンジン回転速度に応じて開閉時間または開閉時期が変更されるものであってもよい。
【0072】
自動二輪車1は吸気バルブセンサ94を備え、ECU70は吸気バルブ開閉検知部84を有している。吸気バルブセンサ94は、吸気バルブ64における開閉時間を検出する。吸気バルブ開閉検知部84は、吸気バルブセンサ94にて検出される吸気バルブ64の開口時間に基づく信号を入力し検知する。吸気バルブ64の開口時間とは、吸気バルブ64が吸気管60とエンジン12との間を開通させる時間である。エンジン回転速度制御部77は、吸気バルブ制御部74を有している。吸気バルブ制御部74は、吸気バルブ開閉検知部84より実開口信号104dを入力する。メモリ76は、エンジン回転速度や実開口信号104dに対応した目標バルブ開口時間を記憶している。そのため、吸気バルブ制御部74は、メモリ76より目標開口時間信号104sを入力する。さらに、吸気バルブ制御部74は、回転位置検知部80より回転位置信号100を入力する。吸気バルブ制御部74は、入力した実開口信号104d、目標開口時間信号104s、および、回転位置信号100に基づいて必要なバルブ開口時間を算出または択出する。吸気バルブ64は、算出または択出されたバルブ開口時間に基づく開口時間制御信号104cを入力する。吸気バルブ64は、開口時間制御信号104cに基づき開口時間が制御される。これにより、エンジン12のエンジン回転速度が増加または減少する。このとき、エンジン回転速度が、所定のエンジン回転速度Rとなるように制御する。
【0073】
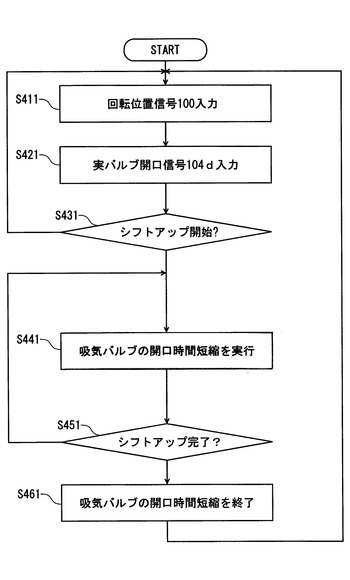
図12は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を減少させるため、吸気バルブ64の開口時間を短縮させる制御を実行する。
【0074】
まず、ステップS411では、吸気バルブ制御部74は、回転位置信号100を入力する。また、ステップS421では、吸気バルブ制御部74は、実開口信号104dを入力する。これにより、吸気バルブ制御部74は、変速装置13における現在のギアポジションと、吸気バルブ64における現在の開口時間と、を検知することができる。なお、ステップS411とステップS421とは、ステップの順序が入れ替わっていてもよく、同時であってもよい。
【0075】
ステップS411およびステップS421に続き、ステップS431では、変速装置13がシフトアップの作動を開始しているか否かが判定される。ステップS431において、変速装置13がシフトアップの作動を開始している場合、ステップS441へ進む。ステップS431において、変速装置13がシフトアップの作動を開始していない場合、ステップS411へ戻る。
【0076】
ステップS441では、吸気バルブ64は、開口時間が短縮される。すなわち、吸気バルブ制御部74は、メモリ76より目標開口時間信号104sを入力する。吸気バルブ制御部74は、目標開口時間信号104sに基づく必要な開口時間を算出または択出する。吸気バルブ64は、算出または択出された開度に基づく開口時間制御信号104cを入力する。吸気バルブ64では、入力した開口時間制御信号104cに基づき開口時間を短縮させる。
【0077】
続いて、ステップS451では、変速装置13がシフトアップの作動を完了しているか否かが判定される。ステップS451において、変速装置13がシフトアップの作動を完了している場合、ステップS411へ戻る。ステップS451において、変速装置13がシフトアップの作動を実施していない場合、ステップS441へ戻る。つまり、ステップS441の制御は、変速装置13がシフトアップの作動を完了するまで実行される。
【0078】
以上のように、吸気バルブ制御部74は、変速装置13がシフトアップの作動を開始すると、シフトアップの作動が完了するまで吸気バルブ64の開口時間を短縮させる制御を実行する。吸気バルブ64の開口時間が短縮されると、エンジン12の内部へ供給される空気量と燃料量が減少する。これにより、ECU70は、エンジン12のエンジン回転速度を減少させることができる。
【0079】
ECU70は、エンジン12へ供給される空気量を増加させることでエンジン回転速度を増加させることができる。以下では、ECU70がエンジン12へ供給される空気量を増加させる制御について説明する。なお、以下の制御フローの説明において、図12とステップの番号のみが異なる場合、説明を省略する。
【0080】
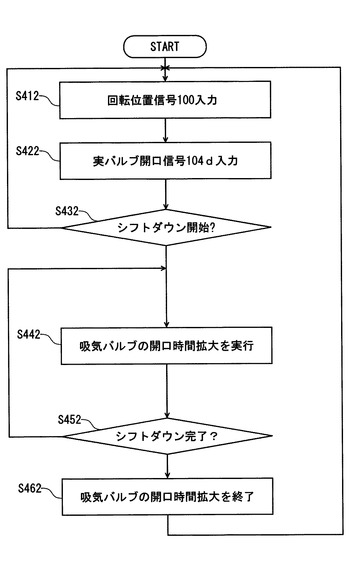
図13は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を増加させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を増加させるため、吸気バルブ64の開口時間を拡大させる制御を実行する。
【0081】
ステップS412およびステップS422に続き、ステップS432では、変速装置13がシフトダウンの作動を開始しているか否かが判定される。ステップS432において、変速装置13がシフトダウンの作動を開始している場合、ステップS442へ進む。ステップS432において、変速装置13がシフトダウンの作動を開始していない場合、ステップS412へ戻る。
【0082】
ステップS442では、吸気バルブ64は、開口時間を拡大させる。すなわち、吸気バルブ制御部74は、メモリ76より目標開口時間信号104sを入力する。吸気バルブ制御部74は、目標開口時間信号104sに基づく必要な開口時間を算出または択出する。吸気バルブ64は、算出または択出された開口時間に基づく開口時間制御信号104cを入力する。吸気バルブ64では、入力した開口時間制御信号104cに基づき開口時間を拡大させる。
【0083】
続いて、ステップS452では、変速装置13がシフトダウンの作動を完了しているか否かが判定される。ステップS452において、変速装置13がシフトアップの作動を完了している場合、ステップS412へ戻る。ステップS452において、変速装置13がシフトアップの作動を実施していない場合、ステップS442へ戻る。つまり、ステップS442の制御は、変速装置13がシフトダウンの作動を完了するまで実行される。
【0084】
以上のように、吸気バルブ制御部74は、変速装置13がシフトダウンの作動を開始すると、シフトダウンの作動が完了するまで吸気バルブ64の開口時間を拡大させる制御を実行する。吸気バルブ64の開口時間が拡大すると、エンジン12の内部へ供給される空気量と燃料量が増加する。これにより、ECU70は、エンジン12のエンジン回転速度を増加させることができる。
【0085】
ECU70は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を増加させる。本実施形態において、パワーユニット10は、開閉時間が変更自在な吸気バルブ64を有している。そのため、ECU70は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまで吸気バルブ64の開口時間を拡大させる。これにより、パワーユニット10は、前述した効果を確実に得ることができる。
【0086】
《その他の変形例》
前記各実施形態において、ECU70がエンジン12のエンジン回転速度を減少させる制御は、点火装置61での点火時期の変更と、燃料供給装置62での燃料噴射量の変更と、スロットル弁63でのスロットル開度の変更と、吸気バルブ64での開口時間の変更と、が列挙されている。ただし、エンジン12のエンジン回転速度を減少させる制御は、前記いずれかの制御の組み合わせであってもよい。また、エンジン12のエンジン回転速度を減少させる制御は、前記制御の全ての組み合わせであってもよい。
【0087】
また、前記各実施形態において、ECU70がエンジン12のエンジン回転速度を増加させる制御は、スロットル弁63でのスロットル開度の変更と、吸気バルブ64での開口時間の変更と、が列挙されている。ただし、エンジン12のエンジン回転速度を増加させる制御は、前記制御の組み合わせであってもよい。
【産業上の利用可能性】
【0088】
本発明は、マニュアルトランスミッションを備えたパワーユニットおよびそれを備えた自動二輪車に関して有用である。
【図面の簡単な説明】
【0089】
【図1】本実施形態に係る自動二輪車の左側面図である。
【図2】本実施形態に係るパワーユニットの構成を示す図である。
【図3】シフトドラムの回転位置に応じた電圧値を示す図である。
【図4】実施形態1におけるエンジン回転速度を減少させる制御について示すブロック図である。
【図5】実施形態1におけるエンジン回転速度を減少させる制御のフローチャートである。
【図6】実施形態2におけるエンジン回転速度を減少させる制御について示すブロック図である。
【図7】実施形態2におけるエンジン回転速度を減少させる制御のフローチャートである。
【図8】実施形態3におけるエンジン回転速度を減少または増加させる制御について示すブロック図である。
【図9】実施形態3におけるエンジン回転速度を減少させる制御のフローチャートである。
【図10】実施形態3におけるエンジン回転速度を増加させる制御のフローチャートである。
【図11】実施形態4におけるエンジン回転速度を減少または増加させる制御について示すブロック図である。
【図12】実施形態4におけるエンジン回転速度を減少させる制御のフローチャートである。
【図13】実施形態4におけるエンジン回転速度を増加させる制御のフローチャートである。
【符号の説明】
【0090】
1 自動二輪車
10 パワーユニット
12 エンジン
13 変速装置(マニュアルトランスミッション)
27 シフトドラム
61 点火装置
62 燃料供給装置(燃料噴射装置)
63 スロットル弁(電子スロットル弁)
64 吸気バルブ(可変吸気バルブ)
70 ECU(制御装置)
90 シフトドラムセンサ
【技術分野】
【0001】
本発明は、マニュアルトランスミッションを備えたパワーユニットおよびそれを備えた自動二輪車に関する。
【背景技術】
【0002】
自動二輪車のトランスミッション(変速装置)として、ライダーの手動操作によって変速が行われるドッグクラッチ式のマニュアルトランスミッションがよく知られている。また、マニュアルトランスミッションを備えた自動二輪車において、ギアポジションを検出するセンサを備え、シフトアップ時にエンジンの点火装置の点火を間引く制御を行うものが知られている(下記特許文献1参照)。シフトアップ時にこのような制御が実行されることにより、ギアポジションの変更が補助される。
【特許文献1】特開2007−32726号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1に記載された自動二輪車では、シフトアップ時には、点火を間引く制御(以下、点火間引き制御という。)が常に行われる。しかし、マニュアルトランスミッションを備えた自動二輪車では、ギアポジションの変更が良好に行われるか否かは、ライダーの技量に依存する。シフト操作に不慣れなライダー(いわゆる初心者)やシフト操作が不得手なライダーにとっては、上記点火間引き制御が実行されることにより、ギアポジションの変更が容易になる。しかし、シフト操作が得意なライダーにとっては、上記点火間引き制御が必要でない場合が多い。すなわち、上記自動二輪車では、シフトアップ時に不必要な点火間引き制御が実行されることがある。
【0004】
また、上記特許文献1に記載された自動二輪車では、点火間引き制御は、ライダーによるシフトアップ操作が開始されてから一定時間行われる。ところが、点火間引き制御が必要となる時間は、ライダーのシフト操作の技量に依存する。したがって、ライダーの技量の個人差とは無関係に一律に点火間引き制御を実行したのでは、ライダーによっては、点火間引き制御が不必要な時期まで継続されてしまったり、逆に、依然として必要であるにも拘わらず点火間引き制御が早く終了してしまうおそれがある。
【0005】
本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、シフトチェンジ時におけるドッグ摩耗の防止やシフトショックの低減を、個々のライダーに応じて実現することである。
【課題を解決するための手段】
【0006】
本発明に係るパワーユニットは、エンジンと、シフトドラムを有するドッグクラッチ式のマニュアルトランスミッションと、前記シフトドラムの回転位置を検出するシフトドラムセンサと、前記シフトドラムセンサからの信号に基づいてギアポジションを検出し、ギアポジションが変更され始めたことが検出されると、変更が完了するまで前記エンジンの回転速度を増加または減少させる制御を実行する制御装置と、を備えたものである。
【発明の効果】
【0007】
本発明によれば、マニュアルトランスミッションを備えたパワーユニットにおいて、シフトチェンジ時に、個々のライダーに応じて、ドッグ摩耗の防止やシフトショックの低減を図ることができる。
【発明を実施するための最良の形態】
【0008】
《実施形態1》
図1は、自動二輪車1の左側面図である。まず、図1を参照しながら、自動二輪車1の概略構成について説明する。なお、以下の説明において、前後左右の方向は、シート9に着座した乗員から視た方向をいうものとする。
【0009】
自動二輪車1は、車体フレーム2を備えている。車体フレーム2は、ヘッドパイプ2aを有している。ヘッドパイプ2aの上端部には、ハンドル3が設けられている。ヘッドパイプ2aの下端部には、フロントフォーク4を介して前輪7が回転自在に取り付けられている。ハンドル3の左側部には、クラッチレバー6が設けられている。後述するエンジン12の上方には、燃料タンク8が設けられている。燃料タンク8の後側には、シート9が設けられている。
【0010】
車体フレーム2の後端部には、スイングアーム18が揺動可能に取り付けられている。スイングアーム18の後端部には、後輪17が回転可能に取り付けられている。
【0011】
車体フレーム2には、駆動源としてのエンジン12を備えたパワーユニット10が懸架されている。パワーユニット10は、エンジン12と、後述するクラッチ14と変速装置13とを有している。パワーユニット10は、図示しない動力伝達機構を介して後輪17に接続されている。前記動力伝達機構は、チェーンやベルト、ドライブシャフト等により構成されている。これにより、パワーユニット10内において生じるエンジン12による駆動力は、前記動力伝達機構によって後輪17に伝えられる。また、エンジン12にて発生する排ガスは、排気管15を通って大気中へ排出される。排気管15の後端の少なくとも一部は、サイレンサ16に覆われている。
【0012】
エンジン12は、ガソリンを燃料とするエンジンである。エンジン12のその他の型式等は特に限定されない。エンジン12は、多気筒エンジンであっても短気筒エンジンであってもよい。また、エンジン12のシリンダの配列および方向は限定されない。
【0013】
図2に示すとおり、本実施形態では、クラッチ14は多板摩擦クラッチである。クラッチ14は、筒状のクラッチハウジング31と、筒状のクラッチボス32と、摩擦板である複数のフリクションプレート33およびクラッチプレート34と、プレッシャプレート35とを備えている。なお、クラッチ14は本実施形態に使用されるものとして一例であり、クラッチ14は多板式クラッチに限定されない。クラッチ14は、単板式クラッチであってもよい。また、クラッチ14は、湿式または乾式のいずれであってもよい。
【0014】
パワーユニット10は、メイン軸22を有している。クラッチハウジング31は筒状に形成されており、メイン軸22に相対回転可能に取り付けられている。クラッチボス32は筒状に形成されており、クラッチハウジング31よりもメイン軸22の径方向内側に配置されている。また、クラッチボス32は、メイン軸22に相対回転不能に取り付けられている。各フリクションプレート33は、クラッチハウジング31に対して、メイン軸22の軸方向に摺動可能に取り付けられている。また、各クラッチプレート34は、クラッチボス32に対して、メイン軸22の軸方向に摺動可能に取り付けられている。各フリクションプレート33と各クラッチプレート34とは、メイン軸22の軸方向に交互に配置されている。
【0015】
プレッシャプレート35は、略円盤形状に形成されており、メイン軸22の軸方向に摺動可能にクラッチボス32に設けられている。ただし、プレッシャプレート35は、メイン軸22の軸方向に摺動可能にクラッチハウジング31に設けられていてもよい。また、プレッシャプレート35は、筒状のメイン軸22内に配置されたプッシュロッド37の一端部(図2の右側)に取り付けられている。プレッシャプレート35は、例えば、玉軸受等の軸受36を介してプッシュロッド37に取り付けられている。この場合、プレッシャプレート35は、メイン軸22に対して回転自在である。また、プッシュロッド37は、図示しないクラッチレリーズ機構を介してクラッチレバー6(図1参照)と接続している。
【0016】
クラッチ14は、皿バネ39を有している。皿バネ39は、メイン軸22の軸方向に関して、プレッシャプレート35をフリクションプレート33とクラッチプレート34とが接触する方向に付勢している。そのため、フリクションプレート33とクラッチプレート34とは互いに接触する。これにより、メイン軸22は、エンジン12のクランク軸(図示せず)の回転に基づいて回転する。
【0017】
フリクションプレート33とクラッチプレート34との接触は、プッシュロッド37の作動により解消される。プッシュロッド37は、クラッチレバー6(図1参照)の操作に基づき作動する。プッシュロッド37がメイン軸22の軸方向を図2の左側から右側に向かって作動すると、プレッシャプレート35がメイン軸22の軸方向を図2の左側から右側に向かって移動する。これにより、フリクションプレート33とクラッチプレート34との接触が解消される。このとき、プッシュロッド37は、皿バネ39の付勢力よりも大きな力をクラッチレバー6等から受ける。フリクションプレート33とクラッチプレート34との接触が解消されると、クラッチ14は、エンジン12の駆動力の伝達が遮断される。
【0018】
変速装置13は、メイン軸22と、ドライブ軸23と、シフトドラム27とを備えている。メイン軸22は、クラッチ14を介してエンジン12のクランク軸(図示せず)に接続されている。メイン軸22とドライブ軸23とは、略平行に配置されている。
【0019】
変速装置13は、いわゆる常時噛合式ドッグトランスミッションである。メイン軸22には、複数の変速ギア25が装着されている。一方、ドライブ軸23には、複数の変速ギア25に対応する複数の変速ギア26が装着されている。複数の変速ギア25と複数の変速ギア26とは、選択された一対のギア同士のみで相互に噛合している。複数の変速ギア25のうち、選択された変速ギア25以外の変速ギア25と、複数の変速ギア26のうち、選択された変速ギア26以外の変速ギア26とのうちの少なくとも一方は、メイン軸22もしくはドライブ軸23に対して回転可能となっている。つまり、選択されていない変速ギア25と、選択されていない変速ギア26のうちの少なくとも一方は、メイン軸22もしくはドライブ軸23に対して空転するようになっている。すなわち、メイン軸22とドライブ軸23との間の回転伝達は、相互に噛合する、選択された変速ギア25および選択された変速ギア26のみを介して行われる。
【0020】
図2に示すように、変速ギア25および変速ギア26の選択は、シフトドラム27によって選択される。シフトドラム27の外周面には、複数のカム溝27dが形成されている。本実施形態において、前記複数のカム溝27dは、シフトドラム27において三つ設けられている。前記三つのカム溝27dには、それぞれシフトフォーク28a,28b,28cが装着されている。各シフトフォークは、それぞれメイン軸22およびドライブ軸23の変速ギア25および26に係合している。
【0021】
また、変速ギア25および変速ギア26は、所定のドッグを形成している。シフトドラム27が回転することによって、複数のシフトフォーク28a,28b,28cは、それぞれが装着しているカム溝27dに案内されてメイン軸22もしくはドライブ軸23の外周を円周方向および軸方向に移動する。複数のシフトフォーク28a,28b,28cのそれぞれは、メイン軸22もしくはドライブ軸23の軸方向を移動することにより、変速ギア25および変速ギア26において、前記ドッグの係合および切断を行う。これにより、変速ギア25および変速ギア26のうちの相互に噛合する固定ギアと摺動ギアとが選択される。複数の変速ギア25および変速ギア26のうち、シフトドラム27の回転位置に応じた位置の変速ギア25と変速ギア26との一対のみが、メイン軸22およびドライブ軸23に対して、それぞれドッグを介してスプラインによる固定状態となる。これにより、変速装置13は、ギアポジションが決定され、変速ギア25および変速ギア26を介して、メイン軸22とドライブ軸23との間で所定の変速比で回転伝達が行われる。なお、シフトドラム27は、シフトアップ時とシフトダウン時とで回転方向が異なる。
【0022】
変速装置13は、所謂マニュアル式変速装置である。つまり、変速装置13は、自動二輪車1に乗車するライダーの操作によりギアポジションが変更される。シフトドラム27は、シフト機構50を介して図示しないシフトペダルに接続されている。シフト機構50は、シフトシャフト51を有している。前記シフトペダルは、シフトシャフト51に取り付けられ、自動二輪車1においてパワーユニット10の外部に設けられている。シフトシャフト51は、前記シフトペダルが操作されることで軸円周方向に回転する。シフトシャフト51の前記回転により、シフトドラム27はシフト機構50を介して回転する。
【0023】
以上のように、変速装置13は、シフトドラム27の回転によりギアポジションが変更される。各ギアポジションの位置は、シフトドラム27において、シフトドラム27の軸外周を円周方向に沿ってギアポジションごとに所定の角度で設定されている。そのため、シフトドラム27の回転位置を知ることで、変速装置13の現在のギアポジションを知ることができる。なお、変速装置13は、最高段と最低段とが連続しているロータリー式のトランスミッションであってもよく、最高段と最低段とが連続していないリターン式のトランスミッションのいずれであってもよい。
【0024】
変速装置13には、シフトドラムセンサ90が設けられている。シフトドラムセンサ90の形態は、シフトドラム27の回転角度または回転位置を検出するものであれば、特に限定されない。シフトドラムセンサ90は、例えば、電位式、光学式、電磁式、または、半導体式を利用したもの、もしくは前記いずれかの組み合わせであってよい。ただし、本実施形態では、シフトドラムセンサ90には、ポテンショメータを用いている。後述するECU70は、シフトドラムセンサ90がシフトドラム27の回転角度または回転位置を検出することにより、前記回転位置ごとに対応した値を検知することができる。
【0025】
図4等に示すように、パワーユニット10は、吸気管60および排気管15を有している。吸気管60は、エンジン12と接続している。また、排気管15は、吸気管60が接続する位置と異なる位置において、エンジン12と接続している。吸気管60の内部には、スロットル弁63が設けられている。スロットル弁63は、吸気管60を流れる空気の量や速度を調整する。また、吸気管60の中途には、燃料供給装置62が設けられている。燃料供給装置62は、所謂気化器であっても燃料噴射装置であってもよい。さらに、エンジン12は、吸気バルブ64と排気バルブ65と点火装置61とを有している。本実施形態において、点火装置61は、電子的に点火時期が制御される。
【0026】
自動二輪車1は、制御装置としてのECU70を備えている。ECU70は、シフトドラム27の回転位置を検知する回転位置検知部80を有している。また、ECU70は、エンジン12の回転速度を制御するエンジン回転速度制御部77を有している。エンジン回転速度制御部77は、以下の点火時期制御部71を有している。また、ECU70は、メモリ76を有している。メモリ76は、自動二輪車1の走行時または自動二輪車1に乗車するライダーに対して必要なデータを記憶している。
【0027】
回転位置検知部80は、シフトドラムセンサ90により検出されるシフトドラム27の回転位置を電圧値もしくは抵抗値として入力し検知する。図3に示すように、ECU70には、シフトドラム27の回転位置に応じた電圧値もしくは抵抗値が設定されている。図3では、電圧値Vのみを縦軸に示している。前述したように、各ギアポジションの位置は、ギアポジションごとにシフトドラム27の所定の回転位置で設定されている。そのため、各ギアポジションの位置は、それぞれ所定の電圧値Vもしくは抵抗値Rとして示される。図3は、変速装置13が6速トランスミッションである場合の電圧値Vとシフトドラム27の原点からの回転位置Dとを示している。前記回転位置Dの単位は、例えばdegで表される。前記原点は、シフトドラム27の軸外円周において、第6速と第1速との間の所定の点が設定される。
【0028】
変速装置13における第1速は、シフトドラム27の回転位置Dとして回転位置D1が設定されている。また、シフトドラム27の回転位置D1は、所定の電圧値として1速電圧値V1が設定されている。すなわち、変速装置13において第1速のギアポジションであるとき、回転位置検知部80は1速電圧値V1を入力する。同様にして、変速装置13における第2速、第3速、…、第6速は、シフトドラム27の回転位置Dとして回転位置D2、D3、…、D6が設定されている。また、シフトドラム27の回転位置D2、D3、…、D6は、所定の電圧値Vとして2速電圧値V2、3速電圧値V3、…、6速電圧値V6が設定されている。これにより、回転位置検知部80は、変速装置13のギアポジションごとに応じた電圧値Vまたは抵抗値Rを入力する。つまり、変速装置13において各ギアポジションのドッグ噛み合い状態であるとき、回転位置検知部80は、変速装置13のギアポジションごとに応じた所定の電圧値Vまたは抵抗値Rを入力する。
【0029】
なお、変速装置13の変速段数は6段に限定されない。変速装置13は、有段式のトランスミッションであり、複数の変数段数を有してればよい。
【0030】
ECU70は、変速装置13においてギアポジションを変更する作動が開始される際、シフトアップもしくはシフトダウンが判別できるようになっている。図3に示すように、5速電圧値V5から見て、5速電圧値V5よりも高いシフトアップ電圧値V5uと、5速電圧値V5よりも低いシフトダウン電圧値V5bとが設定されている。また、変速装置13における第2速、第3速、および第4速のギアポジションの場合、それぞれシフトアップ電圧値V2uとシフトダウン電圧値V2b、シフトアップ電圧値V3uとシフトダウン電圧値V3b、およびシフトアップ電圧値V4uとシフトダウン電圧値V4b、とが設定されている。一方、変速装置13の最低段である第1速のギアポジションの場合、少なくとも1速電圧値V1よりも高いシフトアップ電圧値V1uが設定されている。変速装置13の最高段である第6速のギアポジションの場合、少なくとも6速電圧値V6よりも低いシフトダウン電圧値V6bが設定されている。
【0031】
ここで、任意のギアポジション(第m速と表記する)のm速電圧値Vmとシフトアップ電圧値Vmuとの差とm速電圧値Vmとシフトダウン電圧値Vmbとの差とは、隣り合う二つのシフトアップ電圧値V(m−1)uとシフトダウン電圧値Vmbの差よりも絶対値が小さい。すなわち、例として、第4速と第5速との間においては、|V5−V5b|<|V5b−V4u|、および、|V4u−V4|<|V5b−V4u|の関係が成立している。なお、電圧値Vとシフトドラム27の回転位置Dとは、図3に示すように比例関係に限定されず、右下がりに描かれる反比例関係であってもよい。
【0032】
変速装置13においてm速のギアポジションから高段側へ変更する作動が開始される際、m速電圧値Vmからシフトアップ電圧値Vmuに向かって電圧値Vが変化する。続いて、シフトアップ電圧値Vmuを超えて変化するとシフトアップの作動が開始されていると判定される。逆に、変速装置13においてm速のギアポジションから低段側へ変更する作動が開始される際、m速電圧値Vmからシフトダウン電圧値Vmbに向かって電圧値Vが変化する。続いて、シフトダウン電圧値Vmbを超えて変化するとシフトダウンの作動が開始されていると判定される。ECU70は、ギアポジションが変更され始めたことが検出されると、変更が完了するまでエンジン12の回転速度を増加または減少させる制御を実行する。なお、シフトアップの作動が開始されているとの判定は、シフトアップ電圧値Vmuを超えなくともシフトアップ電圧値Vmuと一致したときであってもよい。シフトダウンの作動が開始されているとの判定は、シフトダウン電圧値Vmbを超えなくともシフトダウン電圧値Vmbと一致したときであってもよい。
【0033】
また、変速装置13のニュートラル位置でのニュートラル電圧値VNが、任意の隣り合うギアポジションの間で設定されている。変速装置13のニュートラル位置がシフトドラム27において第1速と第2速との間に設けられている場合、図3に示すようにニュートラル電圧値VNは1速電圧値V1と2速電圧値V2との間で設定される。この場合、第1速から第2速へシフトアップが開始されているか否かの判定は、1速電圧値V1からシフトアップ電圧値V1uに向かって電圧値Vが変化した後、シフトアップ電圧値V1uを超え、さらにニュートラル電圧値VNを超えて変化すると第2速へシフトアップが開始されていると判定される。一方、第2速から第1速へシフトダウンが開始されているか否かの判定は、2速電圧値V2からシフトダウン電圧値V2bに向かって電圧値Vが変化した後、シフトダウン電圧値V2bを超え、さらにニュートラル電圧値VNを超えて変化すると第1速へシフトダウンが開始されていると判定される。もしくは、ニュートラル位置がシフトドラム27において第1速と第2速との間に設けられている場合、第1速と第2速との間のシフト操作の際に限り、ECU70は、エンジン12の回転速度を増加または減少させる制御を実行しないことにしてもよい。すなわち、シフトアップ電圧値V1u、ニュートラル電圧値VN、およびシフトダウン電圧値V2bが設定されていなくてもよい。また、ニュートラル位置がシフトドラム27において第1速と第2速との間に設けられている場合、第1速と第2速との間のシフトダウンの際に限り、ECU70は、エンジン12の回転速度を増加させる制御を実行しないことにしてもよい。また、第1速と第2速との間のシフトアップの際に限り、ECU70は、エンジン12の回転速度を減少させる制御を実行しないことにしてもよい。
【0034】
回転位置検知部80は、入力した電圧値Vに基づき、回転位置信号100をエンジン回転速度制御部77に出力する。エンジン回転速度制御部77は、入力した回転位置信号100に基づき、エンジン12のエンジン回転速度を増加または減少させる制御を実行する。
【0035】
自動二輪車1は点火センサ91を備え、ECU70は点火時期検知部81を有している。点火センサ91は、点火装置61における点火時期を検出する。点火時期検知部81は、点火センサ91にて検出される点火装置61の点火時期に基づく信号を入力し検知する。点火時期制御部71は、点火時期検知部81より実点火時期信号101dを入力する。メモリ76は、エンジン回転速度や実点火時期信号101dに対応した目標点火時期を記憶している。そのため、点火時期制御部71は、メモリ76より目標点火時期信号101sを入力する。さらに、点火時期制御部71は、回転位置検知部80より回転位置信号100を入力する。点火時期制御部71は、入力した実点火時期信号101d、目標点火時期信号101s、および、回転位置信号100に基づいて必要な点火時期を算出または択出する。点火装置61は、算出または択出された点火時期に基づく点火時期制御信号101cを入力する。点火装置61は、点火時期制御信号101cに基づき点火時期が制御される。これにより、エンジン12のエンジン回転速度が減少する。このとき、ECU70は、ギアポジション変更後のエンジン回転速度が所定のエンジン回転速度Rとなるように制御する。
【0036】
所定のエンジン回転速度Rは、例えば変速装置13のギアポジションごとに異なっている。また、所定のエンジン回転速度Rは、エンジン12の運転状態や自動二輪車1の走行状態により異なっている。例えば、エンジン回転速度センサがエンジン12に設けられている。この場合、所定のエンジン回転速度Rは、ギアポジション変更後の変速装置13の変速比と前記エンジン回転速度センサにて検出されるエンジン回転速度とからECU70において算出される。また、例えば、自動二輪車1には、車速センサが設けられている。この場合、所定のエンジン回転速度Rは、ギアポジション変更後の変速装置13の変速比と前記エンジン回転速度センサにて検出されるエンジン回転速度と前記車速センサにて検出される車速とからECU70において算出される。
【0037】
図5は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を減少させるため、点火装置61の点火時期を遅角させる制御を実行する。
【0038】
まず、ステップS111では、点火時期制御部71は、回転位置信号100を入力する。また、ステップS121では、点火時期制御部71は、実点火時期信号101dを入力する。これにより、点火時期制御部71は、変速装置13における現在のギアポジションと、点火装置61における現在の点火時期と、を検知することができる。なお、ステップS111とステップS121とは、ステップの順序が入れ替わっていてもよく、同時であってもよい。
【0039】
ステップS111およびステップS121に続き、ステップS131では、変速装置13がシフトアップの作動を開始しているか否かが判定される。ステップS131において、変速装置13がシフトアップの作動を開始している場合、ステップS141へ進む。ステップS131において、変速装置13がシフトアップの作動を開始していない場合、ステップS111へ戻る。
【0040】
ステップS141では、点火装置61は、点火時期の遅角を実行する。すなわち、点火時期制御部71は、メモリ76より目標点火時期信号101sを入力する。点火時期制御部71は、目標点火時期信号101sに基づく必要な点火時期を算出または択出する。点火装置61は、算出または択出された点火時期に基づく点火時期制御信号101cを入力する。点火装置61では、入力した点火時期制御信号101cに基づき点火時期が遅角される。
【0041】
続いて、ステップS151では、変速装置13がシフトアップの作動を完了しているか否かが判定される。ステップS151において、変速装置13がシフトアップの作動を完了している場合、ステップS111へ戻る。ステップS151において、変速装置13がシフトアップの作動を実施していない場合、ステップS141へ戻る。つまり、ステップS141の制御は、変速装置13がシフトアップの作動を完了するまで実行される。
【0042】
以上のように、点火時期制御部71は、変速装置13がシフトアップの作動を開始すると、シフトアップの作動が完了するまで点火装置61の点火時期を遅角させる制御を実行する。これにより、ECU70は、エンジン12のエンジン回転速度を減少させることができる。
【0043】
(作用および効果)
本実施形態において、パワーユニット10は、エンジン12と、シフトドラム27を有するドッグクラッチ式の変速装置13と、シフトドラム27の回転位置を検出するシフトドラムセンサ90と、ECU70と、を備えている。ECU70は、シフトドラムセンサ90からの信号に基づいて変速装置13におけるギアポジションを検出する。また、ECU70は、ギアポジションが変更され始めたことが検出されると、変更が完了するまでエンジン12のエンジン回転速度を増加または減少させる制御を実行する。これにより、パワーユニット10は、ギアポジション変更の作動状態に応じ、適正なエンジン回転速度を得ることができる。パワーユニット10は、適正なエンジン回転速度を得ることにより、ギアポジション変更の作動時にドッグ摩耗の防止やシフトショックの低減を図ることができる。
【0044】
ECU70は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる。本実施形態において、エンジン12は、点火装置61を有している。そのため、ECU70は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで点火装置61の点火時期を遅角させる。これにより、パワーユニット10は、前述した効果を確実に得ることができる。
【0045】
《実施形態2》
前記実施形態では、ECU70は、変速装置13のシフトアップの作動時に点火時期制御部71による点火遅角が実行することでエンジン回転速度を減少させていた。しかし、ECU70は、エンジン12へ供給される燃料噴射量を減少させることでエンジン回転速度を減少させることができる。以下では、ECU70がエンジン12へ供給される燃料噴射量を減少させる制御について説明する。なお、前記実施形態と同様の機能を有する構成要件等については同符号を付し、説明を省略する。
【0046】
図6に示すように、エンジン12は、吸気バルブ64と排気バルブ65と点火装置61とを有している。また、吸気管60の中途には、燃料供給装置62が設けられている。本実施形態において、燃料供給装置62は、電子的に燃料噴射量が制御される燃料噴射装置である。
【0047】
自動二輪車1は燃料量センサ92を備え、ECU70は燃料量検知部82を有している。燃料量センサ92は、燃料供給装置62における燃料噴射量を検出する。燃料量検知部82は、燃料量センサ92にて検出される燃料供給装置62の燃料噴射量に基づく信号を入力し検知する。エンジン回転速度制御部77は、燃料量制御部72を有している。燃料量制御部72は、燃料量検知部82より実燃料噴射量信号102dを入力する。メモリ76は、エンジン回転速度や実燃料噴射量信号102dに対応した目標燃料噴射量を記憶している。そのため、燃料量制御部72は、メモリ76より目標燃料噴射量信号102sを入力する。さらに、燃料量制御部72は、回転位置検知部80より回転位置信号100を入力する。燃料量制御部72は、入力した実燃料噴射量信号102d、目標燃料噴射量信号102s、および、回転位置信号100に基づいて必要な燃料噴射量を算出または択出する。燃料供給装置62は、算出または択出された燃料噴射量に基づく燃料噴射量制御信号102cを入力する。燃料供給装置62は、燃料噴射量制御信号102cに基づき燃料噴射量が制御される。これにより、エンジン12のエンジン回転速度が減少する。このとき、エンジン回転速度が、所定のエンジン回転速度Rとなるように制御することにしてもよい。
【0048】
図7は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を減少させるため、燃料供給装置62の燃料噴射量を減少させる制御を実行する。
【0049】
まず、ステップS211では、燃料量制御部72は、回転位置信号100を入力する。また、ステップS221では、燃料量制御部72は、実燃料噴射量信号102dを入力する。これにより、燃料量制御部72は、変速装置13における現在のギアポジションと、燃料供給装置62における現在の燃料噴射量と、を検知することができる。なお、ステップS211とステップS221とは、ステップの順序が入れ替わっていてもよく、同時であってもよい。
【0050】
ステップS211およびステップS221に続き、ステップS231では、変速装置13がシフトアップの作動を開始しているか否かが判定される。ステップS231において、変速装置13がシフトアップの作動を開始している場合、ステップS241へ進む。ステップS231において、変速装置13がシフトアップの作動を開始していない場合、ステップS211へ戻る。
【0051】
ステップS241では、燃料供給装置62は、燃料噴射量を減少させる。すなわち、燃料量制御部72は、メモリ76より目標燃料噴射量信号102sを入力する。燃料量制御部72は、目標燃料噴射量信号102sに基づく必要な燃料噴射量を算出または択出する。燃料供給装置62は、算出または択出された燃料噴射量に基づく燃料噴射量制御信号102cを入力する。燃料供給装置62では、入力した燃料噴射量制御信号102cに基づき燃料噴射量を減少させる。
【0052】
続いて、ステップS251では、変速装置13がシフトアップの作動を完了しているか否かが判定される。ステップS251において、変速装置13がシフトアップの作動を完了している場合、ステップS211へ戻る。ステップS251において、変速装置13がシフトアップの作動を実施していない場合、ステップS241へ戻る。つまり、ステップS241の制御は、変速装置13がシフトアップの作動を完了するまで実行される。
【0053】
以上のように、燃料量制御部72は、変速装置13がシフトアップの作動を開始すると、シフトアップの作動が完了するまで燃料供給装置62が噴射する燃料量を減少させる制御を実行する。これにより、ECU70は、エンジン12のエンジン回転速度を減少させることができる。
【0054】
《実施形態3》
本実施形態では、ECU70は、エンジン12へ供給される空気量を減少させることでエンジン回転速度を減少させることができる。以下では、ECU70がエンジン12へ供給される空気量を減少させる制御について説明する。なお、前記各実施形態と同様の機能を有する構成要件等については同符号を付し、説明を省略する。
【0055】
図8に示すように、エンジン12は、吸気バルブ64と排気バルブ65と点火装置61とを有している。また、吸気管60の内部には、スロットル弁63が設けられている。本実施形態において、スロットル弁63は、電子的に開度が制御される。
【0056】
自動二輪車1はスロットル開度センサ93を備え、ECU70はスロットル開度検知部83を有している。スロットル開度センサ93は、スロットル弁63における開度を検出する。スロットル開度検知部83は、スロットル開度センサ93にて検出されるスロットル弁63の開度に基づく信号を入力し検知する。エンジン回転速度制御部77は、スロットル開度制御部73を有している。スロットル開度制御部73は、スロットル開度検知部83より実開度信号103dを入力する。メモリ76は、エンジン回転速度や実開度信号103dに対応した目標スロットル開度を記憶している。そのため、スロットル開度制御部73は、メモリ76より目標開度信号103sを入力する。さらに、スロットル開度制御部73は、回転位置検知部80より回転位置信号100を入力する。スロットル開度制御部73は、入力した実開度信号103d、目標開度信号103s、および、回転位置信号100に基づいて必要なスロットル開度を算出または択出する。スロットル弁63は、算出または択出されたスロットル開度に基づく開度制御信号103cを入力する。スロットル弁63は、開度制御信号103cに基づき開度が制御される。これにより、エンジン12のエンジン回転速度が増加または減少する。このとき、エンジン回転速度が、所定のエンジン回転速度Rとなるように制御することにしてもよい。
【0057】
図9は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を減少させるため、スロットル弁63の開度を減少させる制御を実行する。
【0058】
まず、ステップS311では、スロットル開度制御部73は、回転位置信号100を入力する。また、ステップS321では、スロットル開度制御部73は、実開度信号103dを入力する。これにより、スロットル開度制御部73は、変速装置13における現在のギアポジションと、スロットル弁63における現在の開度と、を検知することができる。なお、ステップS311とステップS321とは、ステップの順序が入れ替わっていてもよく、同時であってもよい。
【0059】
ステップS311およびステップS321に続き、ステップS331では、変速装置13がシフトアップの作動を開始しているか否かが判定される。ステップS331において、変速装置13がシフトアップの作動を開始している場合、ステップS341へ進む。ステップS331において、変速装置13がシフトアップの作動を開始していない場合、ステップS311へ戻る。
【0060】
ステップS341では、スロットル弁63は、スロットル開度を減少させる。すなわち、スロットル開度制御部73は、メモリ76より目標開度信号103sを入力する。スロットル開度制御部73は、目標開度信号103sに基づく必要な開度を算出または択出する。スロットル弁63は、算出または択出された開度に基づく開度制御信号103cを入力する。スロットル弁63では、入力した開度制御信号103cに基づき開度を減少させる。
【0061】
続いて、ステップS351では、変速装置13がシフトアップの作動を完了しているか否かが判定される。ステップS351において、変速装置13がシフトアップの作動を完了している場合、ステップS311へ戻る。ステップS351において、変速装置13がシフトアップの作動を実施していない場合、ステップS341へ戻る。つまり、ステップS341の制御は、変速装置13がシフトアップの作動を完了するまで実行される。
【0062】
以上のように、スロットル開度制御部73は、変速装置13がシフトアップの作動を開始すると、シフトアップの作動が完了するまでスロットル弁63の開度を減少させる制御を実行する。スロットル弁63の開度が減少すると、エンジン12の内部へ供給される空気量と燃料量が減少する。これにより、ECU70は、エンジン12のエンジン回転速度を減少させることができる。
【0063】
ECU70は、エンジン12へ供給される空気量を増加させることでエンジン回転速度を増加させることができる。以下では、ECU70がエンジン12へ供給される空気量を増加させる制御について説明する。なお、以下の制御フローの説明において、図9とステップの番号のみが異なる場合、説明を省略する。
【0064】
図10は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を増加させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を増加させるため、スロットル弁63の開度を増加させる制御を実行する。
【0065】
ステップS312およびステップS322に続き、ステップS332では、変速装置13がシフトダウンの作動を開始しているか否かが判定される。ステップS332において、変速装置13がシフトダウンの作動を開始している場合、ステップS342へ進む。ステップS332において、変速装置13がシフトダウンの作動を開始していない場合、ステップS312へ戻る。
【0066】
ステップS342では、スロットル弁63は、スロットル開度を増加させる。すなわち、スロットル開度制御部73は、メモリ76より目標開度信号103sを入力する。スロットル開度制御部73は、目標開度信号103sに基づく必要な開度を算出または択出する。スロットル弁63は、算出または択出された開度に基づく開度制御信号103cを入力する。スロットル弁63では、入力した開度制御信号103cに基づき開度を増加させる。
【0067】
続いて、ステップS352では、変速装置13がシフトダウンの作動を完了しているか否かが判定される。ステップS352において、変速装置13がシフトアップの作動を完了している場合、ステップS312へ戻る。ステップS352において、変速装置13がシフトアップの作動を実施していない場合、ステップS342へ戻る。つまり、ステップS342の制御は、変速装置13がシフトダウンの作動を完了するまで実行される。
【0068】
以上のように、スロットル開度制御部73は、変速装置13がシフトダウンの作動を開始すると、シフトダウンの作動が完了するまでスロットル弁63の開度を増加させる制御を実行する。スロットル弁63の開度が増加すると、エンジン12の内部へ供給される空気量と燃料量が増加する。これにより、ECU70は、エンジン12のエンジン回転速度を増加させることができる。
【0069】
ECU70は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を増加させる。本実施形態において、パワーユニット10は、スロットル弁63を有している。そのため、ECU70は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでスロットル弁63の開度を増加させる。これにより、パワーユニット10は、前述した効果を確実に得ることができる。
【0070】
《実施形態4》
本実施形態では、ECU70は、エンジン12へ流入する空気量を減少させることでエンジン回転速度を減少させることができる。以下では、ECU70がエンジン12へ流入する空気量を減少させる制御について説明する。なお、前記各実施形態と同様の機能を有する構成要件等については同符号を付し、説明を省略する。
【0071】
図11に示すように、エンジン12は、吸気バルブ64と排気バルブ65と点火装置61とを有している。本実施形態に係る吸気バルブ64は、少なくとも開閉時間が変更自在である。吸気バルブ64は、一定のリフト量に対しリフト速度が変化することで、開閉時間が変更されるようにしてもよい。また、吸気バルブ64は、一定のリフト速度に対しリフト量が変化することで、開閉時間が変更されるようにしてもよい。吸気バルブ64は、以下のように、ECU70により電子制御式に開閉時間が変更される。ただし、吸気バルブ64は、吸気バルブ64を作動させる吸気カム等の機構により、エンジン回転速度に応じて開閉時間または開閉時期が変更されるものであってもよい。
【0072】
自動二輪車1は吸気バルブセンサ94を備え、ECU70は吸気バルブ開閉検知部84を有している。吸気バルブセンサ94は、吸気バルブ64における開閉時間を検出する。吸気バルブ開閉検知部84は、吸気バルブセンサ94にて検出される吸気バルブ64の開口時間に基づく信号を入力し検知する。吸気バルブ64の開口時間とは、吸気バルブ64が吸気管60とエンジン12との間を開通させる時間である。エンジン回転速度制御部77は、吸気バルブ制御部74を有している。吸気バルブ制御部74は、吸気バルブ開閉検知部84より実開口信号104dを入力する。メモリ76は、エンジン回転速度や実開口信号104dに対応した目標バルブ開口時間を記憶している。そのため、吸気バルブ制御部74は、メモリ76より目標開口時間信号104sを入力する。さらに、吸気バルブ制御部74は、回転位置検知部80より回転位置信号100を入力する。吸気バルブ制御部74は、入力した実開口信号104d、目標開口時間信号104s、および、回転位置信号100に基づいて必要なバルブ開口時間を算出または択出する。吸気バルブ64は、算出または択出されたバルブ開口時間に基づく開口時間制御信号104cを入力する。吸気バルブ64は、開口時間制御信号104cに基づき開口時間が制御される。これにより、エンジン12のエンジン回転速度が増加または減少する。このとき、エンジン回転速度が、所定のエンジン回転速度Rとなるように制御する。
【0073】
図12は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を減少させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を減少させるため、吸気バルブ64の開口時間を短縮させる制御を実行する。
【0074】
まず、ステップS411では、吸気バルブ制御部74は、回転位置信号100を入力する。また、ステップS421では、吸気バルブ制御部74は、実開口信号104dを入力する。これにより、吸気バルブ制御部74は、変速装置13における現在のギアポジションと、吸気バルブ64における現在の開口時間と、を検知することができる。なお、ステップS411とステップS421とは、ステップの順序が入れ替わっていてもよく、同時であってもよい。
【0075】
ステップS411およびステップS421に続き、ステップS431では、変速装置13がシフトアップの作動を開始しているか否かが判定される。ステップS431において、変速装置13がシフトアップの作動を開始している場合、ステップS441へ進む。ステップS431において、変速装置13がシフトアップの作動を開始していない場合、ステップS411へ戻る。
【0076】
ステップS441では、吸気バルブ64は、開口時間が短縮される。すなわち、吸気バルブ制御部74は、メモリ76より目標開口時間信号104sを入力する。吸気バルブ制御部74は、目標開口時間信号104sに基づく必要な開口時間を算出または択出する。吸気バルブ64は、算出または択出された開度に基づく開口時間制御信号104cを入力する。吸気バルブ64では、入力した開口時間制御信号104cに基づき開口時間を短縮させる。
【0077】
続いて、ステップS451では、変速装置13がシフトアップの作動を完了しているか否かが判定される。ステップS451において、変速装置13がシフトアップの作動を完了している場合、ステップS411へ戻る。ステップS451において、変速装置13がシフトアップの作動を実施していない場合、ステップS441へ戻る。つまり、ステップS441の制御は、変速装置13がシフトアップの作動を完了するまで実行される。
【0078】
以上のように、吸気バルブ制御部74は、変速装置13がシフトアップの作動を開始すると、シフトアップの作動が完了するまで吸気バルブ64の開口時間を短縮させる制御を実行する。吸気バルブ64の開口時間が短縮されると、エンジン12の内部へ供給される空気量と燃料量が減少する。これにより、ECU70は、エンジン12のエンジン回転速度を減少させることができる。
【0079】
ECU70は、エンジン12へ供給される空気量を増加させることでエンジン回転速度を増加させることができる。以下では、ECU70がエンジン12へ供給される空気量を増加させる制御について説明する。なお、以下の制御フローの説明において、図12とステップの番号のみが異なる場合、説明を省略する。
【0080】
図13は、本実施形態に係るエンジン回転速度制御部77が、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を増加させる制御の制御フローを示している。エンジン回転速度制御部77は、エンジン回転速度を増加させるため、吸気バルブ64の開口時間を拡大させる制御を実行する。
【0081】
ステップS412およびステップS422に続き、ステップS432では、変速装置13がシフトダウンの作動を開始しているか否かが判定される。ステップS432において、変速装置13がシフトダウンの作動を開始している場合、ステップS442へ進む。ステップS432において、変速装置13がシフトダウンの作動を開始していない場合、ステップS412へ戻る。
【0082】
ステップS442では、吸気バルブ64は、開口時間を拡大させる。すなわち、吸気バルブ制御部74は、メモリ76より目標開口時間信号104sを入力する。吸気バルブ制御部74は、目標開口時間信号104sに基づく必要な開口時間を算出または択出する。吸気バルブ64は、算出または択出された開口時間に基づく開口時間制御信号104cを入力する。吸気バルブ64では、入力した開口時間制御信号104cに基づき開口時間を拡大させる。
【0083】
続いて、ステップS452では、変速装置13がシフトダウンの作動を完了しているか否かが判定される。ステップS452において、変速装置13がシフトアップの作動を完了している場合、ステップS412へ戻る。ステップS452において、変速装置13がシフトアップの作動を実施していない場合、ステップS442へ戻る。つまり、ステップS442の制御は、変速装置13がシフトダウンの作動を完了するまで実行される。
【0084】
以上のように、吸気バルブ制御部74は、変速装置13がシフトダウンの作動を開始すると、シフトダウンの作動が完了するまで吸気バルブ64の開口時間を拡大させる制御を実行する。吸気バルブ64の開口時間が拡大すると、エンジン12の内部へ供給される空気量と燃料量が増加する。これにより、ECU70は、エンジン12のエンジン回転速度を増加させることができる。
【0085】
ECU70は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまでエンジン回転速度を増加させる。本実施形態において、パワーユニット10は、開閉時間が変更自在な吸気バルブ64を有している。そのため、ECU70は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまで吸気バルブ64の開口時間を拡大させる。これにより、パワーユニット10は、前述した効果を確実に得ることができる。
【0086】
《その他の変形例》
前記各実施形態において、ECU70がエンジン12のエンジン回転速度を減少させる制御は、点火装置61での点火時期の変更と、燃料供給装置62での燃料噴射量の変更と、スロットル弁63でのスロットル開度の変更と、吸気バルブ64での開口時間の変更と、が列挙されている。ただし、エンジン12のエンジン回転速度を減少させる制御は、前記いずれかの制御の組み合わせであってもよい。また、エンジン12のエンジン回転速度を減少させる制御は、前記制御の全ての組み合わせであってもよい。
【0087】
また、前記各実施形態において、ECU70がエンジン12のエンジン回転速度を増加させる制御は、スロットル弁63でのスロットル開度の変更と、吸気バルブ64での開口時間の変更と、が列挙されている。ただし、エンジン12のエンジン回転速度を増加させる制御は、前記制御の組み合わせであってもよい。
【産業上の利用可能性】
【0088】
本発明は、マニュアルトランスミッションを備えたパワーユニットおよびそれを備えた自動二輪車に関して有用である。
【図面の簡単な説明】
【0089】
【図1】本実施形態に係る自動二輪車の左側面図である。
【図2】本実施形態に係るパワーユニットの構成を示す図である。
【図3】シフトドラムの回転位置に応じた電圧値を示す図である。
【図4】実施形態1におけるエンジン回転速度を減少させる制御について示すブロック図である。
【図5】実施形態1におけるエンジン回転速度を減少させる制御のフローチャートである。
【図6】実施形態2におけるエンジン回転速度を減少させる制御について示すブロック図である。
【図7】実施形態2におけるエンジン回転速度を減少させる制御のフローチャートである。
【図8】実施形態3におけるエンジン回転速度を減少または増加させる制御について示すブロック図である。
【図9】実施形態3におけるエンジン回転速度を減少させる制御のフローチャートである。
【図10】実施形態3におけるエンジン回転速度を増加させる制御のフローチャートである。
【図11】実施形態4におけるエンジン回転速度を減少または増加させる制御について示すブロック図である。
【図12】実施形態4におけるエンジン回転速度を減少させる制御のフローチャートである。
【図13】実施形態4におけるエンジン回転速度を増加させる制御のフローチャートである。
【符号の説明】
【0090】
1 自動二輪車
10 パワーユニット
12 エンジン
13 変速装置(マニュアルトランスミッション)
27 シフトドラム
61 点火装置
62 燃料供給装置(燃料噴射装置)
63 スロットル弁(電子スロットル弁)
64 吸気バルブ(可変吸気バルブ)
70 ECU(制御装置)
90 シフトドラムセンサ
【特許請求の範囲】
【請求項1】
エンジンと、
シフトドラムを有するドッグクラッチ式のマニュアルトランスミッションと、
前記シフトドラムの回転位置を検出するシフトドラムセンサと、
前記シフトドラムセンサからの信号に基づいてギアポジションを検出し、ギアポジションが変更され始めたことが検出されると、変更が完了するまで前記エンジンの回転速度を増加または減少させる制御を実行する制御装置と、
を備えたパワーユニット。
【請求項2】
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで前記エンジンの回転速度を減少させる制御である、
請求項1に記載のパワーユニット。
【請求項3】
前記エンジンは、点火装置を有し、
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで前記点火装置の点火時期を遅角させる制御である、
請求項2に記載のパワーユニット。
【請求項4】
前記エンジンは、電子スロットル弁を有し、
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで、前記電子スロットル弁を前記変更開始時の状態よりも閉じた状態にする制御である、
請求項2に記載のパワーユニット。
【請求項5】
前記エンジンは、燃料噴射装置を有し、
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで、前記燃料噴射装置の燃料噴射量を前記変更開始時よりも少なくする制御である、
請求項2に記載のパワーユニット。
【請求項6】
前記エンジンは、開閉タイミングが変更自在な可変吸気バルブを有し、
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで、前記可変吸気バルブの開いている時間を前記変更開始時よりも短くする制御である、
請求項2に記載のパワーユニット。
【請求項7】
前記制御は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまで前記エンジンの回転速度を増加させる制御である、
請求項1に記載のパワーユニット。
【請求項8】
前記エンジンは、電子スロットル弁を有し、
前記制御は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまで、前記電子スロットル弁を前記変更開始時の状態よりも開いた状態にする制御である、
請求項7に記載のパワーユニット。
【請求項9】
前記エンジンは、開閉タイミングが変更自在な可変吸気バルブを有し、
前記制御は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまで、前記可変吸気バルブの開いている時間を前記変更開始時よりも長くする制御である、
請求項7に記載のパワーユニット。
【請求項10】
請求項1に記載のパワーユニットを備えた自動二輪車。
【請求項1】
エンジンと、
シフトドラムを有するドッグクラッチ式のマニュアルトランスミッションと、
前記シフトドラムの回転位置を検出するシフトドラムセンサと、
前記シフトドラムセンサからの信号に基づいてギアポジションを検出し、ギアポジションが変更され始めたことが検出されると、変更が完了するまで前記エンジンの回転速度を増加または減少させる制御を実行する制御装置と、
を備えたパワーユニット。
【請求項2】
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで前記エンジンの回転速度を減少させる制御である、
請求項1に記載のパワーユニット。
【請求項3】
前記エンジンは、点火装置を有し、
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで前記点火装置の点火時期を遅角させる制御である、
請求項2に記載のパワーユニット。
【請求項4】
前記エンジンは、電子スロットル弁を有し、
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで、前記電子スロットル弁を前記変更開始時の状態よりも閉じた状態にする制御である、
請求項2に記載のパワーユニット。
【請求項5】
前記エンジンは、燃料噴射装置を有し、
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで、前記燃料噴射装置の燃料噴射量を前記変更開始時よりも少なくする制御である、
請求項2に記載のパワーユニット。
【請求項6】
前記エンジンは、開閉タイミングが変更自在な可変吸気バルブを有し、
前記制御は、ギアポジションが高段側に変更され始めたことが検出されると、変更が完了するまで、前記可変吸気バルブの開いている時間を前記変更開始時よりも短くする制御である、
請求項2に記載のパワーユニット。
【請求項7】
前記制御は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまで前記エンジンの回転速度を増加させる制御である、
請求項1に記載のパワーユニット。
【請求項8】
前記エンジンは、電子スロットル弁を有し、
前記制御は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまで、前記電子スロットル弁を前記変更開始時の状態よりも開いた状態にする制御である、
請求項7に記載のパワーユニット。
【請求項9】
前記エンジンは、開閉タイミングが変更自在な可変吸気バルブを有し、
前記制御は、ギアポジションが低段側に変更され始めたことが検出されると、変更が完了するまで、前記可変吸気バルブの開いている時間を前記変更開始時よりも長くする制御である、
請求項7に記載のパワーユニット。
【請求項10】
請求項1に記載のパワーユニットを備えた自動二輪車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−19154(P2010−19154A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−179940(P2008−179940)
【出願日】平成20年7月10日(2008.7.10)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月10日(2008.7.10)
【出願人】(000010076)ヤマハ発動機株式会社 (3,045)
【Fターム(参考)】
[ Back to top ]