
マルチウェルプレートのウェルの中の内容物を動かすための方法と装置
【解決手段】マルチウェルプレート内の物質を動かすための方法と装置は、プレート内の1つ又はそれ以上のウェルに正圧と負圧を掛けて、例えば、物質がウェルからフィルター要素を通って流れる流量を上げる。正圧を掛ける必要のあるウェルは、例えば、機械視認システムで画像分析を行うことによって、識別される。処理量を上げる必要があると判定されたウェルには負圧と正圧が掛けられ、一方それ以外のウェルには負圧だけが掛けられる。
【発明の詳細な説明】
【技術分野】
【0001】
本出願は、マルチウェルプレートの1つ又はそれ以上のウェルに圧力差を掛けることに関する。
【背景技術】
【0002】
本出願は、2004年7月27日出願の米国特許仮出願第60/591,507号の恩典を請求する。
物質の試料を取り扱う際には、普通、マルチウェルプレート、即ち、それぞれが個別の試料を保持する複数の独立したウェルを有する試料保持器、が使用される。その様なウェルプレートは、物質の試料を、ピペット操作、熱サイクル、分離など様々なプロセスに供試する自動化システムを使用して取り扱われることもある。
【0003】
或る装置では、米国特許第6,491,873号及び/又は米国特許第6,159,368号に示されている装置の様に、マルチウェルプレートの各ウェルには、試料ウェル内の物質を、ウェルからフィルターを通して抜き取るため、真空が掛けられる。例えば、プレート内の全てのウェルの下端に負圧を掛けることができるように、マルチウェルプレートの下側に真空ブロック又はカラーが配置されている。この負圧によって、ウェル内の物質は、ウェルから、ウェルの下端の出口を通して下向きに抜き取られる。ウェル内の物質は、例えば各ウェルに設けられているフィルター要素を通して抜き取られるので、一部の物質は捕捉され、液体及び/又は物質の細かい成分はフィルターを通過することになる。マルチウェルプレートの上側の空間は、このプロセスの間、通常は大気圧で、従って、ウェルを横切って作り出される差圧は、普通は大気圧より低く、例えば、普通は15psi未満である。
【特許文献1】米国特許第6,491,873号明細書
【特許文献2】米国特許第6,159,368号明細書
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の発明人は、その様な濾過装置には幾つかの欠点があると認識している。例えば、一様な真空を複数のウェルに同時に掛ける場合、ウェルの内容物が空になると、真空空間への1つ又はそれ以上の漏洩経路が作り出される。この漏洩経路は、真空空間内の圧力を上げることになり、その結果、プレートの残りのウェルを横切る差圧が下がることになる。内容物が空になるウェルが増えるにつれ、更に多くの漏洩経路が作り出され、差圧が更に下がり、その結果、プレート内の全てのウェルから内容物を抜き取るのに必要な時間が長くなる。本発明の発明人は、多くの用途で、ウェルの内容物をもっと短い期間に抜き取り或いは濾過することが望ましいと理解している。
【課題を解決するための手段】
【0005】
本発明の或る態様によれば、真空ブロックだけによって達成される差圧よりも大きな差圧が、マルチウェルプレートの1つ又はそれ以上のウェルを横切って掛けられる。この大きな圧力差によって、所与のプレート内の各ウェルの内容物を空にするのに必要な時間が短くなり、及び/又は、処理の間に作り出される漏洩経路が補償される。圧力差は、或る実施形態では、マルチウェルプレートを真空ブロックと連通させ、更に、圧力マニホルドをプレートの上面を覆って配置してウェル上に圧力空間を形成することによって作り出される。プレート上の圧力空間には、大気圧より高い圧力が充填され、マルチウェルプレートを横切ってより大きな差圧が作り出される。
【0006】
圧力マニホルドには、マルチウェルプレートの対応する部分と密封嵌合させることのできる面が装備されている。圧力マニホルドは、空気ポンプ又は圧縮空気供給源の様な圧力供給源に取り付けられ、圧力空間に正圧を供給する。実施形態の中には、更に、圧力マニホルドをプレートに固定して、圧力空間内に圧力が作り出されたときに外れるのを防ぐために、ファスナーを備えているものもある。
【0007】
本発明或る態様では、マルチウェルプレートのウェルの中の内容物を動かすための装置は、複数のウェルを有するマルチウェルプレートを含んでおり、前記複数のウェルのそれぞれは、入口及び出口と、複数のウェルの中の少なくとも1つのウェルの出口に負圧を供給するようになっている真空供給源と、真空供給源が複数のウェルの中の少なくとも1つのウェルの出口に負圧を供給している間に、複数のウェルの中の少なくとも1つのウェルの入口に正圧を供給するようになっている圧力供給源と、を含んでいる。
【0008】
別の態様では、真空供給源は、複数のウェルの出口に負圧を供給するようになっており、圧力供給源は、1つ又は複数の選択されたウェルに正圧を供給するようになっている。従って、或る実施形態では、真空は、全て又は大部分のウェルの出口に掛けられるが、正圧は、選択されたウェルだけに掛けられる。例えば、ロボットシステムは、1つ又は複数の選択されたウェルの入口を圧力供給源に連結するようになっている。この様な構成にすれば、装置は、「問題」のウェル、例えば、妨害物又は他の理由でウェルからその内容物が抜き取れないようなウェルの内容物を引き出せるようになる。
【0009】
或る実施形態では、機械視認システムが、1つ又は複数の選択された正圧を掛けるウェルの位置に関する情報を提供する。例えば、機械視認システムは、ウェルを分析して、大部分の物質がウェル内に残っているウェルがあれば、そのウェルを判別する。分析に基づいて、正圧をそのウェルの入口に掛けるべきことが決定され、例えば、ウェルを横切る圧力差が上げられ、ウェルからの物質の移動が加速される。機械視認システムは、対象のウェルの位置を判定し、ロボットシステムの位置を識別し、するとロボットはそのウェルを圧力供給源に連結する。
【0010】
本発明の別の態様では、マルチウェルプレートの各ウェルから内容物を取り除く方法は、複数のウェルの各ウェルがウェルに入っている物質を含んでいる複数のウェルを有しているマルチウェルプレートを提供する段階を含んでいる。マルチウェルプレートのウェルの中の少なくとも1つのウェルの出口に負圧が掛けられ、負圧がウェルの出口に掛けられている間に、ウェルの中の少なくとも1つのウェルの入口に正圧が掛けられる。
【0011】
本発明の上記及びこの他の態様は以下の説明と、特許請求の範囲から明らかになるであろう。
【発明を実施するための最良の形態】
【0012】
本発明の各態様を、添付図面を参照しながら以下に説明するが、図中、同様の要素には同様の参照番号を付している。
本発明の各態様は、物質試料取扱装置に適していれば、どの様な構成を使って実施してもよい。ここでは、例証を目的にして幾つかの異なる実施形態について説明する。しかしながら、これら例証的実施形態は、本発明の範囲を狭く解釈するために使用されるべきではない。また、ここでは本発明の様々な態様を説明するが、これら様々な態様は、適していればどの様な組み合わせで使用してもよいし、単独で使用してもよい。
【0013】
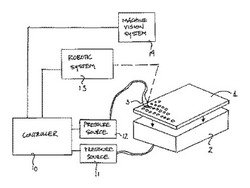
図1は、本発明の態様による試料取扱装置の概略図を示している。この例証的実施形態では、1つ又は複数のマルチウェルプレート1は、装置によって操作される。各マルチウェルプレートは、それぞれが試料物質を保持している幾つかの試料保持ウェル、例えば、96、386又はそれ以上のウェル、を含んでいる。物質には、液体成分、例えば、溶解した成分、懸濁粒子及び/又は他の物質、が含まれる。例えば、試料物質には、血液、DNA又は他の同様な物質、並びに、化学薬品、試薬、マーカー、又は血液、DNAなどと反応し又は相互作用する他の成分、が含まれる。
【0014】
マルチウェルプレート1のウェルは、図1に示すプレート1の上部の開口の様な入口と、プレートの下部の開口の様な出口と、を含んでいる。その様なプレート1の構成は、当技術では既知である。ウェルは、更に、フィルター要素、例えば、各ウェル又はプレートの下端に設けられ、そこを通ってウェル内の物質が抜き出される要素、を含んでいる。プレート1は、プレート1と密封係合して負圧又は真空環境をプレート1の下側に作り出す、真空ブロック2と嵌合される。その様な負圧環境は、ウェル内の物質に、例えば各ウェル内のフィルター要素を通ってウェルの出口に向かって引き込まれるように強要する。負圧は、コントローラ10の制御下で作動する真空ポンプの様な圧力供給源11によって作り出される。
【0015】
本発明の或る態様では、装置は、例えば、真空ブロック2が作り出した真空に曝されている間の、プレート1のウェルの中の物質の動きを監視するため、機械視認システム14又は他の装置を含んでいる。例えば、機械視認システム14は、試料物質が真空ブロック2によってウェルから抜き取られているときのプレート1のビデオ画像を分析する。この分析によって、1つ又はそれ以上のウェルが他のウェルよりも進度が遅いか否か、例えば、1つ又はそれ以上のウェルの中の物質が他と比べてゆっくりと取り出されているか否かが判定される。当業者には理解頂けるように、プレート内のウェルの処理具合を監視するには、プレート1内の各ウェルに近接して又は各ウェルに光学センサー、容量センサー、又は他の適したセンサーを配置するなど、他の方法もある。その様なセンサーは、対応するウェル内の物質の量を直接測定し、この情報をコントローラ10が使って、どのウェルの処理具合が他と比べて遅いのかを判定する。
【0016】
本発明の或る態様では、1つ又はそれ以上のウェルに負圧が掛けられている間に、プレートの1つ又はそれ以上のウェルに正圧が掛けられる。例えば、コントローラ10が、機械視認システム14からの情報に基づいて、特定のウェルの物質の抜き取り具合が遅過ぎると判定すると、コントローラ10は圧力供給源12(例えば、空気ポンプ又は圧縮空気供給源)を制御して、例えば、管又はマニホルド3を介して、そのウェルの入口側に正圧を掛ける。管又はマニホルド3は、例えば、プレート1の上面と嵌合し、選択されたウェルに圧力を掛けるための弁機構又は他の装置を含んでいる構造など、適していればどの様な方式でウェルに連結させてもよい。別の実施形態では、管又はマニホルド3は、複数のウェルではなく唯1つのウェルに連結されている。例えば、管又はマニホルド3は、ウェルに近い又はウェルの中のプレートと係合して圧力シールを作り出す密封部材を有している。その後、正圧が、圧力供給源12によってウェルに掛けられる。或る実施形態では、ロボットシステム13が、管又はマニホルド3を操作してウェルを圧力供給源12に連結する。例えば、ロボットシステム13は、ロボットシステム13が密封部材を選択されたウェルに連結して適した正圧を掛けることができるように、密封部材と圧力供給源12への接続部を含んでいる。この様に、ロボットシステム13は、幾つかのウェルには正圧が掛けられ、他のウェルには周囲の圧力だけが掛けられるように、1つ又はそれ以上のウェルを個別に圧力供給源12に選択的に連結する。ロボットシステム13は、機械視認システム14からの情報、例えば、プレート上のウェルの位置に関する情報に基づいて、管又はマニホルド3を選択されたウェルに連結する。この様に、機械視認システム14を使って、ロボットシステム13の動きを、当技術では既知の様に、開ループ又は閉ループで制御することができる。
【0017】
別の実施形態では、例えば、マニホルドが全ウェルに亘る共通の圧力空間を作り出し、プレート1の全てのウェルに同時に正圧を掛けることができるようになっている。従って、このシステムは、必ずしも選択したウェルに圧力を掛けることができる必要はない。
【0018】
本発明の態様によれば、例えば、濾過処理の間に、試料保持器内の全てのウェルが処理される速度は早くなる。更に、本発明の或る態様では、必ずしも、プレート内の全てのウェルに対して、その入口側に、場合によっては発泡や他の問題を引き起こすこともある正圧を掛ける必要はない。代わりに、選択されたウェルにだけ、正圧をその入口に掛ければよい。
【0019】
以上、本発明を、特定の実施形態に結び付けて説明してきたが、当業者には、多くの代替案、修正案、派生案が明白であろう。従って、ここに述べた本発明の実施形態は、例証を意図したものであり、本発明に制約を課すものではない。本発明の精神及び範囲から逸脱すること無く、様々な変更を加えることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の各態様による、試料取扱装置の概略ブロック図である。
【技術分野】
【0001】
本出願は、マルチウェルプレートの1つ又はそれ以上のウェルに圧力差を掛けることに関する。
【背景技術】
【0002】
本出願は、2004年7月27日出願の米国特許仮出願第60/591,507号の恩典を請求する。
物質の試料を取り扱う際には、普通、マルチウェルプレート、即ち、それぞれが個別の試料を保持する複数の独立したウェルを有する試料保持器、が使用される。その様なウェルプレートは、物質の試料を、ピペット操作、熱サイクル、分離など様々なプロセスに供試する自動化システムを使用して取り扱われることもある。
【0003】
或る装置では、米国特許第6,491,873号及び/又は米国特許第6,159,368号に示されている装置の様に、マルチウェルプレートの各ウェルには、試料ウェル内の物質を、ウェルからフィルターを通して抜き取るため、真空が掛けられる。例えば、プレート内の全てのウェルの下端に負圧を掛けることができるように、マルチウェルプレートの下側に真空ブロック又はカラーが配置されている。この負圧によって、ウェル内の物質は、ウェルから、ウェルの下端の出口を通して下向きに抜き取られる。ウェル内の物質は、例えば各ウェルに設けられているフィルター要素を通して抜き取られるので、一部の物質は捕捉され、液体及び/又は物質の細かい成分はフィルターを通過することになる。マルチウェルプレートの上側の空間は、このプロセスの間、通常は大気圧で、従って、ウェルを横切って作り出される差圧は、普通は大気圧より低く、例えば、普通は15psi未満である。
【特許文献1】米国特許第6,491,873号明細書
【特許文献2】米国特許第6,159,368号明細書
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の発明人は、その様な濾過装置には幾つかの欠点があると認識している。例えば、一様な真空を複数のウェルに同時に掛ける場合、ウェルの内容物が空になると、真空空間への1つ又はそれ以上の漏洩経路が作り出される。この漏洩経路は、真空空間内の圧力を上げることになり、その結果、プレートの残りのウェルを横切る差圧が下がることになる。内容物が空になるウェルが増えるにつれ、更に多くの漏洩経路が作り出され、差圧が更に下がり、その結果、プレート内の全てのウェルから内容物を抜き取るのに必要な時間が長くなる。本発明の発明人は、多くの用途で、ウェルの内容物をもっと短い期間に抜き取り或いは濾過することが望ましいと理解している。
【課題を解決するための手段】
【0005】
本発明の或る態様によれば、真空ブロックだけによって達成される差圧よりも大きな差圧が、マルチウェルプレートの1つ又はそれ以上のウェルを横切って掛けられる。この大きな圧力差によって、所与のプレート内の各ウェルの内容物を空にするのに必要な時間が短くなり、及び/又は、処理の間に作り出される漏洩経路が補償される。圧力差は、或る実施形態では、マルチウェルプレートを真空ブロックと連通させ、更に、圧力マニホルドをプレートの上面を覆って配置してウェル上に圧力空間を形成することによって作り出される。プレート上の圧力空間には、大気圧より高い圧力が充填され、マルチウェルプレートを横切ってより大きな差圧が作り出される。
【0006】
圧力マニホルドには、マルチウェルプレートの対応する部分と密封嵌合させることのできる面が装備されている。圧力マニホルドは、空気ポンプ又は圧縮空気供給源の様な圧力供給源に取り付けられ、圧力空間に正圧を供給する。実施形態の中には、更に、圧力マニホルドをプレートに固定して、圧力空間内に圧力が作り出されたときに外れるのを防ぐために、ファスナーを備えているものもある。
【0007】
本発明或る態様では、マルチウェルプレートのウェルの中の内容物を動かすための装置は、複数のウェルを有するマルチウェルプレートを含んでおり、前記複数のウェルのそれぞれは、入口及び出口と、複数のウェルの中の少なくとも1つのウェルの出口に負圧を供給するようになっている真空供給源と、真空供給源が複数のウェルの中の少なくとも1つのウェルの出口に負圧を供給している間に、複数のウェルの中の少なくとも1つのウェルの入口に正圧を供給するようになっている圧力供給源と、を含んでいる。
【0008】
別の態様では、真空供給源は、複数のウェルの出口に負圧を供給するようになっており、圧力供給源は、1つ又は複数の選択されたウェルに正圧を供給するようになっている。従って、或る実施形態では、真空は、全て又は大部分のウェルの出口に掛けられるが、正圧は、選択されたウェルだけに掛けられる。例えば、ロボットシステムは、1つ又は複数の選択されたウェルの入口を圧力供給源に連結するようになっている。この様な構成にすれば、装置は、「問題」のウェル、例えば、妨害物又は他の理由でウェルからその内容物が抜き取れないようなウェルの内容物を引き出せるようになる。
【0009】
或る実施形態では、機械視認システムが、1つ又は複数の選択された正圧を掛けるウェルの位置に関する情報を提供する。例えば、機械視認システムは、ウェルを分析して、大部分の物質がウェル内に残っているウェルがあれば、そのウェルを判別する。分析に基づいて、正圧をそのウェルの入口に掛けるべきことが決定され、例えば、ウェルを横切る圧力差が上げられ、ウェルからの物質の移動が加速される。機械視認システムは、対象のウェルの位置を判定し、ロボットシステムの位置を識別し、するとロボットはそのウェルを圧力供給源に連結する。
【0010】
本発明の別の態様では、マルチウェルプレートの各ウェルから内容物を取り除く方法は、複数のウェルの各ウェルがウェルに入っている物質を含んでいる複数のウェルを有しているマルチウェルプレートを提供する段階を含んでいる。マルチウェルプレートのウェルの中の少なくとも1つのウェルの出口に負圧が掛けられ、負圧がウェルの出口に掛けられている間に、ウェルの中の少なくとも1つのウェルの入口に正圧が掛けられる。
【0011】
本発明の上記及びこの他の態様は以下の説明と、特許請求の範囲から明らかになるであろう。
【発明を実施するための最良の形態】
【0012】
本発明の各態様を、添付図面を参照しながら以下に説明するが、図中、同様の要素には同様の参照番号を付している。
本発明の各態様は、物質試料取扱装置に適していれば、どの様な構成を使って実施してもよい。ここでは、例証を目的にして幾つかの異なる実施形態について説明する。しかしながら、これら例証的実施形態は、本発明の範囲を狭く解釈するために使用されるべきではない。また、ここでは本発明の様々な態様を説明するが、これら様々な態様は、適していればどの様な組み合わせで使用してもよいし、単独で使用してもよい。
【0013】
図1は、本発明の態様による試料取扱装置の概略図を示している。この例証的実施形態では、1つ又は複数のマルチウェルプレート1は、装置によって操作される。各マルチウェルプレートは、それぞれが試料物質を保持している幾つかの試料保持ウェル、例えば、96、386又はそれ以上のウェル、を含んでいる。物質には、液体成分、例えば、溶解した成分、懸濁粒子及び/又は他の物質、が含まれる。例えば、試料物質には、血液、DNA又は他の同様な物質、並びに、化学薬品、試薬、マーカー、又は血液、DNAなどと反応し又は相互作用する他の成分、が含まれる。
【0014】
マルチウェルプレート1のウェルは、図1に示すプレート1の上部の開口の様な入口と、プレートの下部の開口の様な出口と、を含んでいる。その様なプレート1の構成は、当技術では既知である。ウェルは、更に、フィルター要素、例えば、各ウェル又はプレートの下端に設けられ、そこを通ってウェル内の物質が抜き出される要素、を含んでいる。プレート1は、プレート1と密封係合して負圧又は真空環境をプレート1の下側に作り出す、真空ブロック2と嵌合される。その様な負圧環境は、ウェル内の物質に、例えば各ウェル内のフィルター要素を通ってウェルの出口に向かって引き込まれるように強要する。負圧は、コントローラ10の制御下で作動する真空ポンプの様な圧力供給源11によって作り出される。
【0015】
本発明の或る態様では、装置は、例えば、真空ブロック2が作り出した真空に曝されている間の、プレート1のウェルの中の物質の動きを監視するため、機械視認システム14又は他の装置を含んでいる。例えば、機械視認システム14は、試料物質が真空ブロック2によってウェルから抜き取られているときのプレート1のビデオ画像を分析する。この分析によって、1つ又はそれ以上のウェルが他のウェルよりも進度が遅いか否か、例えば、1つ又はそれ以上のウェルの中の物質が他と比べてゆっくりと取り出されているか否かが判定される。当業者には理解頂けるように、プレート内のウェルの処理具合を監視するには、プレート1内の各ウェルに近接して又は各ウェルに光学センサー、容量センサー、又は他の適したセンサーを配置するなど、他の方法もある。その様なセンサーは、対応するウェル内の物質の量を直接測定し、この情報をコントローラ10が使って、どのウェルの処理具合が他と比べて遅いのかを判定する。
【0016】
本発明の或る態様では、1つ又はそれ以上のウェルに負圧が掛けられている間に、プレートの1つ又はそれ以上のウェルに正圧が掛けられる。例えば、コントローラ10が、機械視認システム14からの情報に基づいて、特定のウェルの物質の抜き取り具合が遅過ぎると判定すると、コントローラ10は圧力供給源12(例えば、空気ポンプ又は圧縮空気供給源)を制御して、例えば、管又はマニホルド3を介して、そのウェルの入口側に正圧を掛ける。管又はマニホルド3は、例えば、プレート1の上面と嵌合し、選択されたウェルに圧力を掛けるための弁機構又は他の装置を含んでいる構造など、適していればどの様な方式でウェルに連結させてもよい。別の実施形態では、管又はマニホルド3は、複数のウェルではなく唯1つのウェルに連結されている。例えば、管又はマニホルド3は、ウェルに近い又はウェルの中のプレートと係合して圧力シールを作り出す密封部材を有している。その後、正圧が、圧力供給源12によってウェルに掛けられる。或る実施形態では、ロボットシステム13が、管又はマニホルド3を操作してウェルを圧力供給源12に連結する。例えば、ロボットシステム13は、ロボットシステム13が密封部材を選択されたウェルに連結して適した正圧を掛けることができるように、密封部材と圧力供給源12への接続部を含んでいる。この様に、ロボットシステム13は、幾つかのウェルには正圧が掛けられ、他のウェルには周囲の圧力だけが掛けられるように、1つ又はそれ以上のウェルを個別に圧力供給源12に選択的に連結する。ロボットシステム13は、機械視認システム14からの情報、例えば、プレート上のウェルの位置に関する情報に基づいて、管又はマニホルド3を選択されたウェルに連結する。この様に、機械視認システム14を使って、ロボットシステム13の動きを、当技術では既知の様に、開ループ又は閉ループで制御することができる。
【0017】
別の実施形態では、例えば、マニホルドが全ウェルに亘る共通の圧力空間を作り出し、プレート1の全てのウェルに同時に正圧を掛けることができるようになっている。従って、このシステムは、必ずしも選択したウェルに圧力を掛けることができる必要はない。
【0018】
本発明の態様によれば、例えば、濾過処理の間に、試料保持器内の全てのウェルが処理される速度は早くなる。更に、本発明の或る態様では、必ずしも、プレート内の全てのウェルに対して、その入口側に、場合によっては発泡や他の問題を引き起こすこともある正圧を掛ける必要はない。代わりに、選択されたウェルにだけ、正圧をその入口に掛ければよい。
【0019】
以上、本発明を、特定の実施形態に結び付けて説明してきたが、当業者には、多くの代替案、修正案、派生案が明白であろう。従って、ここに述べた本発明の実施形態は、例証を意図したものであり、本発明に制約を課すものではない。本発明の精神及び範囲から逸脱すること無く、様々な変更を加えることができる。
【図面の簡単な説明】
【0020】
【図1】本発明の各態様による、試料取扱装置の概略ブロック図である。
【特許請求の範囲】
【請求項1】
マルチウェルプレートのウェルの中の内容物を動かすための装置において、
複数のウェルを有するマルチウェルプレートであって、前記複数のウェルのそれぞれが入口と出口を有している、マルチウェルプレートと、
前記複数のウェルの中の少なくとも1つのウェルの出口に負圧を供給するようになっている真空供給源と、
前記真空供給源が前記複数のウェルの中の少なくとも1つのウェルの前記出口に前記負圧を供給している間に、前記複数のウェルの中の少なくとも1つのウェルの入口に正圧を供給するようになっている圧力供給源と、を備えており、前記負圧と正圧は、前記複数のウェルの中の少なくとも1つのウェルの中の試料物質を、前記出口に向いて動くように強要する、装置。
【請求項2】
前記真空供給源は、複数の前記ウェルの前記出口に負圧を供給するようになっており、前記圧力供給源は、1つ又はそれ以上の選択されたウェルに正圧を供給するようになっている、請求項1に記載の装置。
【請求項3】
前記1つ又はそれ以上の選択されたウェルを前記圧力供給源に連結するようになっているロボットシステムを更に備えている、請求項2に記載の装置。
【請求項4】
前記1つ又はそれ以上の選択されたウェルの位置に関する情報を提供する機械視認システムを更に備えている、請求項3に記載の装置。
【請求項5】
前記機械視認システムは、前記ウェルの入口に正圧を掛ける必要のある前記1つ又はそれ以上の選択されたウェルを識別し、前記ロボットシステムに情報を提供して、前記ロボットシステムが、前記1つ又はそれ以上の選択されたウェルを前記圧力供給源に連結できるようにする、請求項4に記載の装置。
【請求項6】
前記機械視認システムは、前記ウェルの入口に正圧を掛ける必要のある1つのウェルを識別するようになっており、前記ロボットシステムは、前記1つのウェルの入口を前記圧力供給源に連結するようになっている、請求項4に記載の装置。
【請求項7】
前記機械視認システムは、前記ウェルの中に在る物質の量に基づいて、前記ウェルの入口に正圧を掛ける必要のある1つのウェルを識別するようになっている、請求項4に記載の装置。
【請求項8】
前記マルチウェルプレートの各ウェルにはフィルター要素が取り付けられており、前記各ウェル内の物質は、前記ウェルの前記出口に負圧が掛けられると、前記フィルター要素を通して抜き出される、請求項1に記載の装置。
【請求項9】
マルチウェルプレートのウェルから内容物を動かすための方法において、
複数のウェルを有するマルチウェルプレートを提供する段階であって、前記複数のウェルは、それぞれ、前記ウェルの中に入った物質を含んでいる、マルチウェルプレートを提供する段階と、
前記マルチウェルプレート内の前記ウェルの中の少なくとも1つのウェルの出口に負圧を掛ける段階と、
前記負圧が前記ウェルの前記出口に掛けられている間に、前記ウェルの中の少なくとも1つのウェルの入口に正圧を掛け、前記ウェルの中の前記少なくとも1つのウェルに前記負圧と正圧を掛けることによって、前記ウェルの中の前記少なくとも1つのウェルの中の物質に前記ウェルの前記出口に向かって動くように強要する段階とを備える方法。
【請求項10】
前記負圧は複数の前記ウェルの前記出口に掛けられ、前記正圧は1つ又はそれ以上の選択されたウェルに掛けられる、請求項9に記載の方法。
【請求項11】
前記複数のウェルの中の少なくとも1つのウェルの前記入口を前記正圧の供給源に選択的に連結する段階を更に含んでいる、請求項10に記載の方法。
【請求項12】
機械視認システムを使って、前記1つ又はそれ以上の選択されたウェルの位置に関する情報を提供する段階を更に含んでいる、請求項11に記載の方法。
【請求項13】
ロボットシステムに情報を提供して、前記ロボットシステムが、前記1つ又はそれ以上の選択されたウェルを前記正圧の供給源に連結できるようにする段階を更に含んでいる、請求項12に記載の方法。
【請求項14】
前記機械視認システムは、ウェルの入口に正圧を掛ける必要のある1つのウェルを識別するようになっている、請求項12に記載の方法。
【請求項15】
前記機械視認システムは、ウェル内に在る物質の量に基づいて、ウェルの入口に正圧を掛ける必要のある1つのウェルを識別するようになっている、請求項12に記載の方法。
【請求項16】
前記マルチウェルプレートの各ウェルにはフィルター要素が取り付けられており、前記各ウェル内の物質は、前記ウェルの前記出口に負圧が掛けられると、前記フィルター要素を通して抜き出される、請求項9に記載の方法。
【請求項1】
マルチウェルプレートのウェルの中の内容物を動かすための装置において、
複数のウェルを有するマルチウェルプレートであって、前記複数のウェルのそれぞれが入口と出口を有している、マルチウェルプレートと、
前記複数のウェルの中の少なくとも1つのウェルの出口に負圧を供給するようになっている真空供給源と、
前記真空供給源が前記複数のウェルの中の少なくとも1つのウェルの前記出口に前記負圧を供給している間に、前記複数のウェルの中の少なくとも1つのウェルの入口に正圧を供給するようになっている圧力供給源と、を備えており、前記負圧と正圧は、前記複数のウェルの中の少なくとも1つのウェルの中の試料物質を、前記出口に向いて動くように強要する、装置。
【請求項2】
前記真空供給源は、複数の前記ウェルの前記出口に負圧を供給するようになっており、前記圧力供給源は、1つ又はそれ以上の選択されたウェルに正圧を供給するようになっている、請求項1に記載の装置。
【請求項3】
前記1つ又はそれ以上の選択されたウェルを前記圧力供給源に連結するようになっているロボットシステムを更に備えている、請求項2に記載の装置。
【請求項4】
前記1つ又はそれ以上の選択されたウェルの位置に関する情報を提供する機械視認システムを更に備えている、請求項3に記載の装置。
【請求項5】
前記機械視認システムは、前記ウェルの入口に正圧を掛ける必要のある前記1つ又はそれ以上の選択されたウェルを識別し、前記ロボットシステムに情報を提供して、前記ロボットシステムが、前記1つ又はそれ以上の選択されたウェルを前記圧力供給源に連結できるようにする、請求項4に記載の装置。
【請求項6】
前記機械視認システムは、前記ウェルの入口に正圧を掛ける必要のある1つのウェルを識別するようになっており、前記ロボットシステムは、前記1つのウェルの入口を前記圧力供給源に連結するようになっている、請求項4に記載の装置。
【請求項7】
前記機械視認システムは、前記ウェルの中に在る物質の量に基づいて、前記ウェルの入口に正圧を掛ける必要のある1つのウェルを識別するようになっている、請求項4に記載の装置。
【請求項8】
前記マルチウェルプレートの各ウェルにはフィルター要素が取り付けられており、前記各ウェル内の物質は、前記ウェルの前記出口に負圧が掛けられると、前記フィルター要素を通して抜き出される、請求項1に記載の装置。
【請求項9】
マルチウェルプレートのウェルから内容物を動かすための方法において、
複数のウェルを有するマルチウェルプレートを提供する段階であって、前記複数のウェルは、それぞれ、前記ウェルの中に入った物質を含んでいる、マルチウェルプレートを提供する段階と、
前記マルチウェルプレート内の前記ウェルの中の少なくとも1つのウェルの出口に負圧を掛ける段階と、
前記負圧が前記ウェルの前記出口に掛けられている間に、前記ウェルの中の少なくとも1つのウェルの入口に正圧を掛け、前記ウェルの中の前記少なくとも1つのウェルに前記負圧と正圧を掛けることによって、前記ウェルの中の前記少なくとも1つのウェルの中の物質に前記ウェルの前記出口に向かって動くように強要する段階とを備える方法。
【請求項10】
前記負圧は複数の前記ウェルの前記出口に掛けられ、前記正圧は1つ又はそれ以上の選択されたウェルに掛けられる、請求項9に記載の方法。
【請求項11】
前記複数のウェルの中の少なくとも1つのウェルの前記入口を前記正圧の供給源に選択的に連結する段階を更に含んでいる、請求項10に記載の方法。
【請求項12】
機械視認システムを使って、前記1つ又はそれ以上の選択されたウェルの位置に関する情報を提供する段階を更に含んでいる、請求項11に記載の方法。
【請求項13】
ロボットシステムに情報を提供して、前記ロボットシステムが、前記1つ又はそれ以上の選択されたウェルを前記正圧の供給源に連結できるようにする段階を更に含んでいる、請求項12に記載の方法。
【請求項14】
前記機械視認システムは、ウェルの入口に正圧を掛ける必要のある1つのウェルを識別するようになっている、請求項12に記載の方法。
【請求項15】
前記機械視認システムは、ウェル内に在る物質の量に基づいて、ウェルの入口に正圧を掛ける必要のある1つのウェルを識別するようになっている、請求項12に記載の方法。
【請求項16】
前記マルチウェルプレートの各ウェルにはフィルター要素が取り付けられており、前記各ウェル内の物質は、前記ウェルの前記出口に負圧が掛けられると、前記フィルター要素を通して抜き出される、請求項9に記載の方法。
【図1】



【公表番号】特表2008−508521(P2008−508521A)
【公表日】平成20年3月21日(2008.3.21)
【国際特許分類】
【出願番号】特願2007−523754(P2007−523754)
【出願日】平成17年7月27日(2005.7.27)
【国際出願番号】PCT/US2005/026582
【国際公開番号】WO2006/015012
【国際公開日】平成18年2月9日(2006.2.9)
【出願人】(503220129)プロテダイン・コーポレーション (9)
【Fターム(参考)】
【公表日】平成20年3月21日(2008.3.21)
【国際特許分類】
【出願日】平成17年7月27日(2005.7.27)
【国際出願番号】PCT/US2005/026582
【国際公開番号】WO2006/015012
【国際公開日】平成18年2月9日(2006.2.9)
【出願人】(503220129)プロテダイン・コーポレーション (9)
【Fターム(参考)】
[ Back to top ]