
マルチオブジェクト測位システムおよび電力制御ベースの多重アクセス制御方法
【課題】既存のENとHNの問題を効果的に解決し、かつ信号の衝突を解決し、システムの時空間再使用性能を改善することが可能である多重アクセスコントロール方法を提供。
【解決手段】オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含む。タグ装置は、測位装置の状態情報を記録する測位装置リストを有する。タグ装置が、チャネル要求パケット(CRP)を間欠的に送信し、idle状態でかつCRPを受信した測位装置が、有効範囲内に、測位装置によって受信したCRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信し、CAPを受信したタグ装置が、CAPの内容に応じて記憶した前記測位装置リストを更新し、タグ装置が測位装置リストを参照してCRPの送信電力を調節する。
【解決手段】オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含む。タグ装置は、測位装置の状態情報を記録する測位装置リストを有する。タグ装置が、チャネル要求パケット(CRP)を間欠的に送信し、idle状態でかつCRPを受信した測位装置が、有効範囲内に、測位装置によって受信したCRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信し、CAPを受信したタグ装置が、CAPの内容に応じて記憶した前記測位装置リストを更新し、タグ装置が測位装置リストを参照してCRPの送信電力を調節する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マルチオブジェクト測位システムの多重アクセス制御に関し、特に、自律型のオブジェクト測位システムにおいて複数のタグ装置を同時に追跡するための分散型電力制御に基づく多重アクセス制御方法に関する。
【背景技術】
【0002】
オブジェクト測位(位置測定)システムは、オフィス、ヘルスケア、セキュリティ、炭鉱、地下道、スマートビルディング(smart building)、レストランなどのような多くの適用エリアにおいて幅広い適用可能性のある技術である。成功する位置測定システムにとって必要不可欠な特徴は、多重アクセスコントロール性能である。この仕組みにより、複数の可動性のオブジェクトの位置を同時に特定することが可能となる。それは多くの位置測位に基づく用途にとって一般的な要求である。測位システムは、同時に全ての訪問者の位置を特定し、それに応じて案内情報を提供する。病院における患者、医者、および協力者の追跡に関しては、おそらく多くの患者、医者及び協力者が同じ手術室に同時に存在する。従って、測位システムによって複数のオブジェクトを同時に追跡することが不可欠である。オフィス、地下道、スマートビルディング、レストランなどの他の用途でも、複数のオブジェクトを同時に追跡することが必要とされる。
【0003】
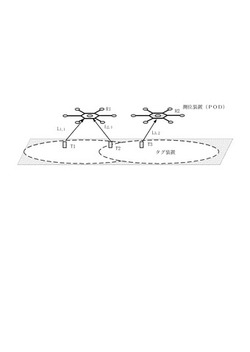
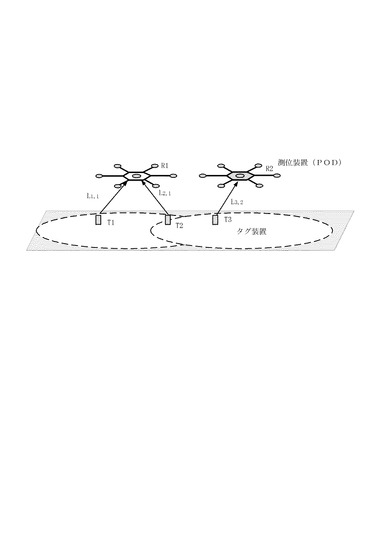
これまで、複数の可動性のオブジェクトの追跡要求に対して、自律超音波屋内追跡システム(Autonomous Ultrasound Indoor Tracking System)(AUITS)が、高精度かつ高ロバスト(highly robust)で、客の立場を考えた屋内追跡システムとして提案されている。それは、1装置(POD)による測位の考えを利用し、超音波の到着時間(TOA:Time Of Arrival)を距離測量のために用いる。PODは固定トポロジー構造の測位装置であり、複数の超音波受信機を単一の装置に一体化し、利用者の要求に応じて至る所に設置することが可能である。PODはコンパクトな装置である(見た目はほとんどフリスビーのようである)。使用する場合、PODは傘の骨格のような数個の伸縮可能なロッドを広げることが可能であり、各ロッドの端に超音波受信機が設けられている。広がったPODのトポロジーが固定され、その受信機の座標を簡単に計算することができるため、超音波受信機の座標のマニュアルキャリブレーションは一切必要ない。加えて、受信機がすべて1つの装置上に存在しているので、複雑な無線通信ベースのシグナリングおよびネットワークプロトコルも必要ない。図1は、2つのPOD R1とR2を含むマルチオブジェクト測位システムを示している。AUITSシステムとPODの詳細については、2008年1月29日に本出願によって出願された中国特許出願No.200810006317.0号、「1つの装置(POD)による測位、自律超音波測位システムおよびPODを利用する方法(Positioning on One Device (POD) and
Autonomous Ultrasound Positioning System and Method Using the POD)」に説明されている。この先の出願は、それらの全体が参照の目的でここに組み込まれる。
【0004】
説明を簡単にするために、一例としてAUITSシステムおよびPOD測位装置を用いて本発明を説明する。しかしながら、本発明の原理および技術的解決法がAUITSシステムおよびPOD測位装置に限定されなことだけでなく、移動性のオブジェクト追跡の達成のために適切な機能を有する測位システムおよび装置であれば、他の共通の屋内測位システムおよび測位装置に適用することができることは、以下の詳細な説明から容易に理解されるはずである。
【0005】
図1に示すAUITSシステムの具体例は、複数のタグ装置および複数のPODを含んでいる。この具体例において、AUITSシステムは2つのPODおよび3つのタグ装置を含んでいる。PODは、設置の容易さおよびキャリブレーションの容易さを考慮して監視環境に取り付けられる構造上のトポロジーを備えた測位装置として設計されている。PODは、中央に位置するRF送受信機と周囲に広がる複数のUS受信機で構成されている。タグ装置T1、T2およびT3は、PODによって追跡される移動性のオブジェクトに取り付けられる。各タグ装置は、RF送受信機およびUS送信器からなる。AUITSシステムが使用されている時、図1で示されるように、タグ装置はPODにRFとUS(超音波)の信号を送信する。RF信号は、時刻同期およびタグ装置識別のために利用される。US(超音波)信号は、タグ装置と超音波受信機の間の距離を測定するために利用される。複数の超音波受信機に対する距離測量に基づいて、PODは、タグ装置(すなわち、オブジェクト)の位置は推測することができる。本発明は、主に、AUITSシステムなどのようなマルチオブジェクト測位システムの多重アクセスコントロール問題を解決するものである。
【0006】
AUITSシステムにおいて、多重アクセスコントロール(MAC)プロトコルの設計は非常に重大である。それは複数のPODがそれらの動作範囲において全てのタグ装置を正確かつ効率的に検出することを可能にする。特に、AUITSなどのようなマルチオブジェクト測位システムにとって、有効なMACプロトコルがなければ、いくつかの問題が提起されることになる。例えば、RFまたは超音波の送信中に信号の衝突が発生する可能性がある。それは、測位エラーに帰結するTOAの不正確な測定を引き起こすかもしれない。信号の衝突が発生すると、衝突した信号で占められていた時間が無駄になり、性能劣化に帰結する。また、より良い有効範囲およびより良い性能を実現するために、複数のPODを配置することもできるが、同時に複数のタグ装置を追跡することができないので、密に配置されたPODを十分に活用することはできない。よって、PODリソースが無駄になる。これらの問題は、AUITS適用における重大な課題を提起するだろう。しかしながら、それらはいくつかの主要な問題の一面である。効率的なMACプロトコルを設計するためには、重要な問題の背後に存在する本質を分析し対処する必要がある。例えば、以下に説明するような隠れ端末(HN)問題とさらし端末(EN)問題である。
【0007】
図2Aおよび図2Bは、HN問題とEN問題を説明するのための概略図である。
1.隠れ端末(Hidden Node:HN)問題
【0008】
MAC設計にとって信号の衝突を回避することは基本的な要求である。すなわち、MACは、HN問題(HN Problem)によって引き起こされる衝突するタグ装置からの同時通信を防止する。
【0009】
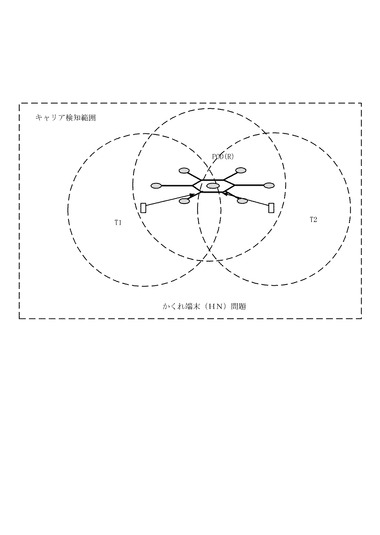
図2Aに示すように、2つのタグ装置T1、T2が同じ受信機R(例えば、POD)に同時に送信しているにもかかわらず、互いのトラフィックを感知できない場合に、HN問題が発生する。HN問題は測位エラーおよび性能低下を発生させる。タグ装置のキャリヤセンス半径をDCSと表し、タグ装置の送信距離をDTと表すと、HN問題の条件は、以下のようになる。
【数1】

【0010】
HN問題を解決する従来の方法は、DCS>2DTとなるように、DCSを大きくすることである。しかしながら、キャリヤセンス半径を大きくすることは他の重大な問題を引き起こす可能性がある、つまり、下記に紹介するさらし端末(EN)問題である。さらに、AUITSシステムについては、2種類の物理的な信号(RFとUS信号)がオブジェクト追跡のために利用される。従って、RFおよびUSチャネルの両方を、衝突防止プロトコル設計のために入念に考慮すべきである。さらに、RFとUSがタグ装置から常にペアで放出され、USの伝播速度(約340m/s)がRFより非常に遅くかつとUSが符号化されないことを考慮すると、それらの特徴は、MACプロトコル設計の過程において、互いに関連させ、かつ徹底的に考慮する必要がある。
2.さらし端末(Exposed Node:EN)問題
【0011】
信号衝突防止の他に、MACプロトコルにとって他の重要な要求は効率である。これは、理想的なMACプロトコルが、AUITSシステムが可能限り多くの複数のタグ装置sを同時に追跡することができるように、RFとUSのチャネルの時空間再利用を十分に活用することを意味する。これを達成するためには、MACプロトコルを、さらし端末(EN)問題を抑えるように設計すべきである。
【0012】
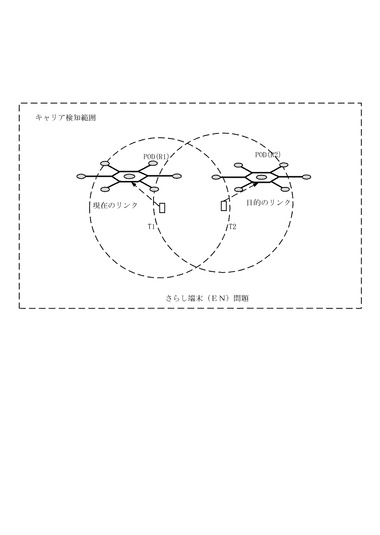
図2Bに示すように、あるリンクが現在のリンクのキャリア検知により妨げられた時、EN問題が起こる。しかしながら、この場合、目的とするリンクは現在のリンクと衝突しない。図2Bに示す例において、タグ装置T2が測位装置R2に送信したい場合、タグ装置T2は他のタグ装置T1の稼動中のトラフィックのキャリアを検知する。衝突を回避するために、T2はR2に送信しない。実際、T2からR2への送信はT1からR1への送信と衝突しない。このようにして、EN問題が発生する。EN問題は、PODリソースの無駄な消費および性能低下を引き起こす。EN問題の条件は以下の通りである。
【数2】
【0013】
HN問題の解決方法と反対に、EN問題を解決するこれまでの方法は、Dcsを下げることである。したがって、HNとENの問題を同時に解決するのに適したバランスを見つけ出すのは困難である。
【0014】
さらに、公平性(Fairness)もまた、MACプロトコル設計で考慮すべき重要な要素である。公平性の目的は、異なるタグ装置が統計的に同じ機会をもってAUITSシステムにおいて測位されることを可能にすることである。いくつかのタグ装置が頻繁に測位され、他のタグ装置はほとんど測位されないということは期待されない。
【0015】
以上の分析に基づいて、MACプロトコルを設計し開発することは、RF+US信号の信号の衝突を回避し、時空間再利用を改善、AUITSシステムの複数のタグ装置追跡に公平性を保つことは重要である。これらはまさに本発明の主要な目的である。
【0016】
搬送波感知多重アクセス/衝突回避方式(CSMA/CA)や時分割多元接続方式(TDMA)など、ネットワークおよび無線ネットワーク通信のために、1970年以降、多数のMACプロトコルが提案されている。上記のMAC設計の動機付け、モバイルノードと基地局間のデータ通信を遂行することにある。また、そのようなMACは、RFのみか、超音波のみに基づいた屋内測位システムなどのような単一の信号を有する測位システムには適用可能である。例えば、「RADAR:An In-Building RF-based User Location and
Tracking System(RFベースの利用者測位と追尾システムの構築)、P.Bahl.etc.、Proc.IEEE INFOCOM、2000」(非特許文献1)においては、RADARシステムが提案されている。RADARシステムは、802.11WLANと同じMACプロトコルを使用する、802.11の無線ネットワークにおいて受信した信号強度に基づいた測位システムである。さらに、「オブジェクトの位置決定のためのシステムおよび方法」というタイトルの国際公開 No.WO 03/087871 A1(特許文献1)の「Sonitor」システムは、部屋単位の位置精度を達成するための超音波のみの屋内測位システムを提供する。Sonitorのタグ装置は、リスニングエリアにある受信器に、20kHzから40kHzの超音波信号を送信する。特に、Sonitorシステムは、タグ装置に超音波チャネルを割り当てるために、超音波信号について搬送波検知多重アクセス方式技術を利用する。USチャネルが空いていれば、タグ装置は受信機に一意の信号を伝える。次に、受信機が信号を読み取り、到着時刻を検出し、次いで、中央のサーバにそれらの検出を転送する。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】国際公開 No.WO 03/087871 A1
【特許文献2】米国特許6,493,649号
【非特許文献】
【0018】
【非特許文献1】RADAR:An In-Building RF-based User Location and TrackingSystem(RFベースの利用者測位と追尾システムの構築)、P.Bahl.etc.、Proc.IEEE INFOCOM、2000
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、それらの従来のMACプロトコルは、多重信号に基づいた屋内測位システムに直ちに利用することができない。そのようなシステムでは、MACプロトコル設計のために異なる物理的な信号チャネルを一緒に考慮する必要がある。このことは、RFとUSの信号をオブジェクト追跡のために利用するAUITSシステムにおいて特に当てはまる。この問題を解決するために、最も関連する既存の解決法は、B.Nissankaらによる「クリケットシステム」である。このクリケット位置支援システムは、「モバイル・コンピューティングとネットワーキングに関する第6回国際会議の議事録(Proceedings of the Sixth International Conference on Mobile
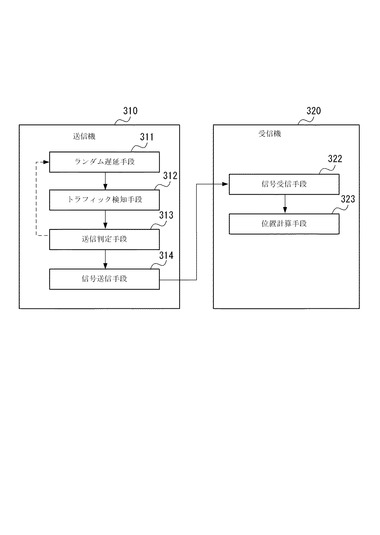
Computing and Networking, Boston, Massachusetts, USA, August 2000)」に開示されている。上述した文献は、それらの全体が参照の目的で本明細書に組み込まれる。「クリケット」システムは、ビルディング内に設置された、互いに独立し、接続されてない複数の送信器を備える。各送信器はRF信号とUS信号の両方を送信することができる。図3は、クリケットシステムの概略構成を示すブロック図である。図3のシステムにおいては、送信機310と受信機320を示している。「クリケット」システムは、各送信機の伝送時間が、時間間隔[T1、T2]msの範囲内の一様分布で任意に選択されるランダム化に基づくMACプロトコル(randomization based MAC protocol)を利用する。図3に示すように、送信機310は、ランダム遅延手段311を用いることにより、異なるビーコン信号の伝送時間をセットする。したがって、異なるビーコンの送信は統計的に独立している。ランダム遅延後、送信機210のトラフィック検知手段312は、Dus時間の間RFキャリアを検知する。Dusは超音波が消滅すると予想される時間間隔である。このようにする目的は、RF+USの新たな送信と他の送信機からの現在のRF信号およびUS信号の間の衝突を防ぐことにある。Dusの間、送信判定手段313は、チャネルが空いているかどうかを判定する。Dusの間チャネルが空いていれば、送信判定手段313は、新たなRF+US信号を送信することを信号送信手段314に指示する。そうでなければ、チャネルが空になるまで、送信機はランダム遅延時間の間待ち続ける。図3は、また、測位装置側としての受信機320を示す。受信機320は、送信機からRF+US信号を受信する信号受信手段322と、検出結果に基づいてオブジェクトの位置を計算する位置計算手段323を含む。
【0020】
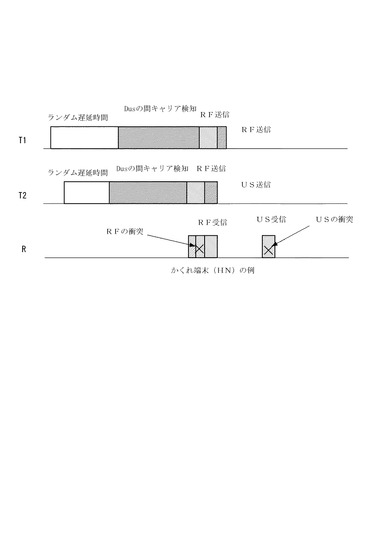
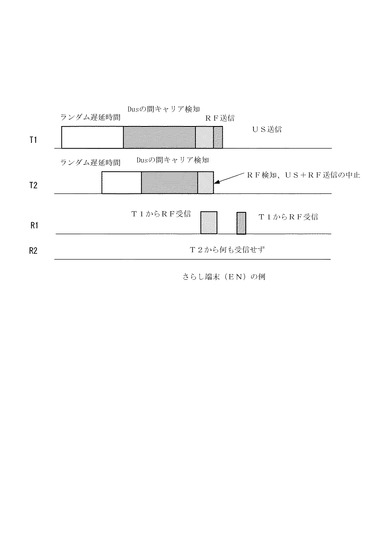
しかしながら、クリケットシステムで利用されるランダム化に基づくMACプロトコルは、HNとENの問題を解決することができない。まず、例として図2Aの場合を使用し、かつ図3に示すクリケットシステムのブロック図を参照して、HN問題に対するタイミング図を図4Aに示す。T1とT2は最初にランダム遅延を実行し、それから、Dus時間の間にRFキャリアを検知する。T1とT2の何れも、互いに送信信号を検知することができないので、それらは両方ともPOD Rに対して信号を送信することを決定する。T1とT2によって送信されたRF+US信号は、受信機Rで次々に衝突するだろう。確かに、「クリケット」システムは、HN問題に対して「廃棄する」方法を適用する。すなわち、受信機RがDusの間に1つ以上のRFメッセージを受信すると、受信機は、US信号がどのRFメッセージに対応するかを確認することができず、その時、受信機は、US信号とRFメッセージを廃棄する。この処理は信号混同によって引き起こされる測位エラーを除外することができるけれども、チャネル容量および資源活用効率はかなり低くなる。さらに、例として図2Bの場合を挙げると、クリケットシステムにはEN問題も存在する。図4Bに示すように、T1とT2は最初にランダム遅延を実行する。次に、T1はDus時間の間RFキャリアを検知し、POD R1にRF+US信号を送信することを決定する。その結果、経路LT1、R1を確立する。次に、T2はT1からのトラフィックを検知し、R2に対して信号を送信しない。このように、T2とR2の間の目的の送信は、キャリア検知によって禁止される。しかしながら、確かに、LT2、R2はLT1、R1と衝突しないけれども、チャネルリソースの無駄な消費につながる。このように、クリケットシステムにおいてはEN問題を解決する方法は言及されていない。
【0021】
他の関連する現存の解決法は、「オブジェクトの位置と他の情報を判定するための検出システム」というタイトルの米国特許6,493,649号(特許文献1)のBatシステムである。「バット」システムは、監視すべき部屋の天井に超音波受信機を配置する。これらの受信機は整列して配置され、有線ネットワークによってよって制御基地局に接続されている。超音波送信機は、追跡すべきオブジェクトに付けられている。Batシステムにおいては、位置決めのためのタイムスロットを割り当てた全てのオブジェクト送信機を登録する集中型のTDMAのようなMACプロトコルが利用される。周期的に、基地局はRF信号として識別情報を送信する。同時に、基地局はすべての接続している超音波受信機に有線ネットワークによって同期パルスを送信する。オブジェクトは送信された自身のIDを受信すると、超音波信号を発行する。Batシステムにおいて提示されたTDMAのようなプロトコルについては、1)集中型の基地局を維持するのに多大なコストと労力を必要とする、2)全てのオブジェクトタグをシステムブートストラップ段階(system bootstrap phase)で登録しなければならない、という問題を有している。稼働しているシステムに新たなタグ装置を追加するのは困難である。したがって、システムの柔軟性は十分とは言えない。さらに、Batシステムにとって重要な問題は、リソースの低い時空間再利用性である。個々のオブジェクトタグ装置を追跡するためには、タイムスロットにおいて特定のタグが信号を送出するのを全ての測位装置が待ち合わせる必要がある。しかしながら、実際上、そのようなタグ装置からの信号を検知するのは測位装置のごく僅かであり、他の多くの測位装置はその期間中常にIDLE状態のままである。
【課題を解決するための手段】
【0022】
本発明は、複数のオブジェクトの追跡と測位のための電力制御ベースの多重アクセス制御方法及びシステムを供給する。また、本発明は、複数のPODおよび複数のタグ装置の追跡計画のためのMACプロトコルを提供する。その本発明の目的は、先行技術における測位信号の衝突(RFおよび超音波信号の両方)を回避し、無線チャネルの時空間の再使用を改善し、ENとHNの問題を解消することである。
【0023】
本発明の第1の態様によれば、オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含むマルチオブジェクト測位システムのための電力制御基づく多重アクセスコントロール方法であって、各タグ装置が測位装置の状態情報を記録する測位装置リストを記憶する記憶ユニットを含み、前記タグ装置が、チャネル要求パケット(CRP)を間欠的に送信するステップと、idle状態でかつ前記CRPを受信した測位装置が、有効範囲内に、前記測位装置によって受信した前記CRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に前記測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信するステップと、前記CAPを受信したタグ装置が、前記CAPの内容に応じて記憶した前記測位装置リストを更新するステップと、前記タグ装置が測位装置リストを参照してCRPの送信電力を調節するステップとを含む。さらに、他の態様では、CRPを受信したタグ装置が、CRPに含まれるタグ装置の識別情報(TagID)が自身の識別情報と一致すると判定すると、位置信号(RF+US信号)の送信を開始する。測位装置(例えばPOD)は、受信した位置信号を使用することによりオブジェクトの位置を計算する。
【0024】
本発明の第2の態様によれば、電力制御に基づく多重アクセスコントロールを実行可能なマルチオブジェクト測位システムであって、オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含み、前記タグ装置は、前記測位装置の状態情報を記録する測位装置リストを記憶する記憶手段と、チャネル要求パケット(CRP)を間欠的に送信するチャネル要求手段と、前記測位装置から受信したチャネル割当てパケット(CAP)の内容に基づいて前記測位装置リストを更新する測位装置リスト更新手段と、前記測位装置リストを参照して前記CRPの送信電力を調節する送信電力調整手段とを備え、前記測位装置は、前記タグ装置からの前記CRPを受信し、Idle状態の場合に、有効範囲内に、前記測位装置によって受信した前記CRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に前記測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信する状態応答手段を備える。
【0025】
マルチオブジェクト測位システムにおいて、タグ装置は、追跡される移動性のオブジェクトに取り付けられる。また、各タグ装置はRF送受信機およびUS送信機を含む。例として、複数のPODが、測位装置として監視環境に取り付けられる。上述したように、各PODは中央にRF送受信機を備え、周囲に幾つかのUS受信機を備える。また、PODは固定トポロジー構造を有する。PODは、ここで例として説明され、本発明の範囲を限定しない。本発明の技術分野において周知の他の測位装置に本発明の原理を同様に適用できることは当業者であれば理解できるであろう。先行技術と比較し、本発明の重要な点は、付近の測位装置(例えば、POD)の状態をタグ装置に知らせるための手法を提供することである。これにより、タグ装置は、最も近くかつIDLE状態のPODにRF+US信号を送信するために送信電力を適切に調節することができる。この方法によって、衝突を回避しながら、RFとUSチャネルを十分に活用することができる。タグ装置を高性能にする本発明の手法は、PODとタグ装置間のオンラインCRP−CAP交換処理によって、付近のPOD情報を記録するために全てのタグ装置に測位装置リストを保存することである。このリストは全てのタグ装置にセットされ、間断なく更新される。リストのPODの状態に従って、タグ装置は、いつ送信するか、かつ適切に送信電力を選択するかを自主的に判定することができる。
【0026】
ブートストラップ段階において、全てのタグ装置の測位装置リストは空である。CRPの送信電力はデフォルトである。RF+USデータの送信の前に、全てのタグ装置は、測定要求に対してチャネル要求パケット(CRP)を送信するためにRFチャネルに参加する。CRPがPODによって受信されると、PODは、すぐに、その動作範囲内の全てのタグ装置にチャネル割当てパケット(CAP)を応答する。CAPの目的は次の2つである。
1)位置測定のためのRF+USを発行することをCRPを送信するタグ装置に命じること(言いかえれば、チャネルはこのタグ装置に割り当てられる)。
2)割り当てられたタグ装置によるRF+US送信の期間中、PODがBUSY状態であることを他の全てのタグ装置に通知すること。
CAPに基づいて、チャネルが割り当てられたタグ装置とチャネルを割り当てられないタグ装置の両方が、個々の測位装置リストにおけるPODの情報を更新することができる。リストにおいて、POD情報は、PODID、PODまでの距離、POD状態などを含む。PODまでの距離は、例えば、RF信号の無線信号強度(RSS:Radio Signal Strength)によって測定される。また、PODIDおよびPOD状態はCAPメッセージの内容から認識される。次に、チャネルを割り当てられないタグ装置は、送信電力を下げて、他の近隣のPODからのチャネル割当てのためにCRPを送信し続ける。送信電力を低下させる目的は次の2つである。
1)より近いPODと見つけ出すために通信距離を短縮すること。
2)現在稼動中のRF+USの送信との衝突を回避すること。
PODとタグ装置間の数回のCRP−CAP交換によって、各タグ装置は近隣のPODを全て見つけ出し、間断なくオンラインで更新された測位装置リストを構築することができる。各CRP送信に対して、測位装置リストが空でない場合、タグ装置は、適切に送信電力を選択して位置測定要求のために最も近いPODにCRPを発行する。
【0027】
PODとタグ装置間のCRP−CAP交換により、CAPの送信半径が条件を満たす場合、HN問題を解決することができる。より正確には、CAPの送信半径がCRPの最大の伝送距離より大きければ、本発明のMAC方法はHN問題を解決できる。従って、本発明のMAC方法は、衝突するタグ装置からの同時通信を効果的に防ぐことができる。HN問題に対する本発明の解決方法については、後述する説明において詳細に説明する。
【0028】
また、本発明のMAC方法において、キャリア検知はもはや送信決定ための印とならない。CRP−CAPに基づいたチャネル割当て手順では、伝送リンクが衝突しない場合、適切な送信電力選択によって全ての送信を同時に確立することができる。このことは、本発明のMAC方法によってEN問題を解決できることを示す。これにより、本発明のMAC方法は、複数PODシステムにおいて複数のタグ装置の同時位置測位を可能にする。EN問題に対する本発明の解決方法については、後述する説明において詳細に説明する。
【発明の効果】
【0029】
本発明においては、各受信機が常に1つの送信器だけと通信することを保証することができる。この結果、RFおよびUSの衝突が発生しない。
【0030】
さらに、タグ装置が素早く最も近くかつIDLE状態のPODを選択することができ、かつ他のタグ装置に対する干渉を回避するよう適切に送信電力を調節することができるので、異なるタグ装置とPOD間における同時接続が可能となる。このため、先行技術と比較して、時空間の再使用が非常に改善される。
【図面の簡単な説明】
【0031】
本発明の前述した特徴及び他の特徴は、添附の図面を参照した以下の説明からより明らかになるであろう。
【図1】マルチオブジェクト測位システムを示すのための概略図である。
【図2A】隠れ端末(HN)問題についての説明のために概略図である。
【図2B】さらし端末(EN)問題についての説明のために概略図である。
【図3】関連技術によるマルチオブジェクト測位システムの構成を示すブロック図である。
【図4A】図3に示すシステムがHN問題に直面する場合を説明するタイミングチャートである。
【図4B】図3に示すシステムがEN問題に直面する場合を説明するタイミングチャートである。
【図5】本発明による電力制御に基づく多重アクセスコントロール実現するマルチオブジェクト測位システム500の構成を示すブロック図である。
【図6】チャネル要求パケット(CRP)およびチャネル割当てパケット(CAP)メッセージのデータ構造例を示す図である。
【図7】図5に示すシステムの動作手順を示すのためのフローチャートである。
【図8】タグ装置側の動作手順を示すのためのフローチャートである。
【図9】測位装置(POD)側の動作手順を示すのためのフローチャートである。
【図10A】本発明による、2つのタグ装置T1、T2と2つの測位装置POD R1、R2を含むマルチオブジェクト測位システムの動作手順の具体例を示す図である。
【図10B】本発明による、2つのタグ装置T1、T2と2つの測位装置POD R1、R2を含むマルチオブジェクト測位システムの動作手順の具体例を示す図である。
【発明を実施するための形態】
【0032】
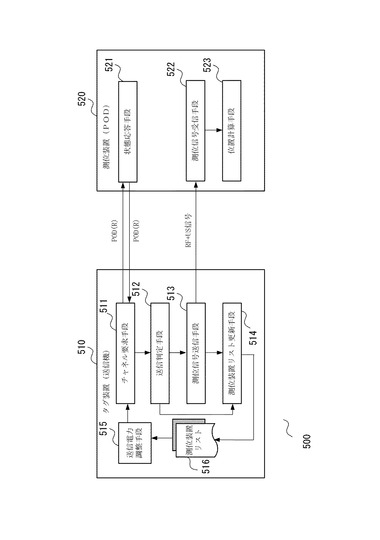
図5は、本発明によるマルチオブジェクト測位システム500の構成を示すブロック図である。このマルチオブジェクト測位システム500は、電力制御に基づく多重アクセスコントロールを実現することができる。説明を簡素化するため、図5では、1つのタグ装置(送信器)510と1つの測位装置(受信機)520との間の相互関係だけを示している。しかしながら、システム500は1つ以上のタグ装置および測位装置を含むことが可能である。ここで、測位装置520は例えばPOD装置である。システム500において、タグ装置510は、追跡する移動性のオブジェクトに取り付けられる。また、タグ装置は、それぞれRF送受信機およびUS送信機(図示しない)を含むことができる。複数のPOD520は、監視環境において複数の移動性のオブジェクトを追跡し位置を特定するのために、監視環境(例えば、天井等)に取り付けられる。PODは、中央に位置するRF送受信機と周囲に広がる複数の超音波受信機(図示しない)で構成される。
【0033】
図5に示すように、タグ装置510は、チャネル要求手段511と、送信判定手段512と、測位信号送信手段513と、測位装置リスト更新手段514と、送信電力調整手段515と、隣接するPODの状態を記録する測位装置リスト516とを含む。対応して、測位装置(POD)520は、状態応答手段521、測位信号受信手段522および位置計算手段523を含む。
【0034】
図7は、図5に示すシステム500の動作手順を示すのためのフローチャートである。以下に、本発明による電力制御に基づく多重アクセスコントロールを実現するマルチオブジェクト測位システム500の機能について説明する。
【0035】
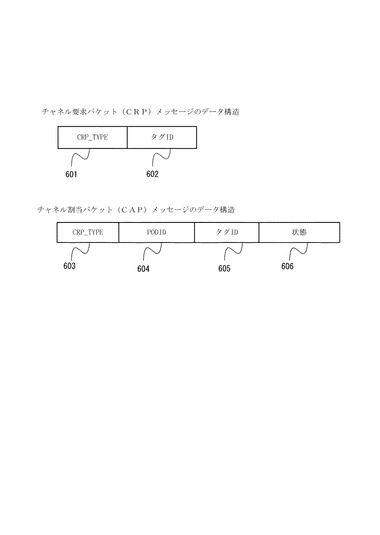
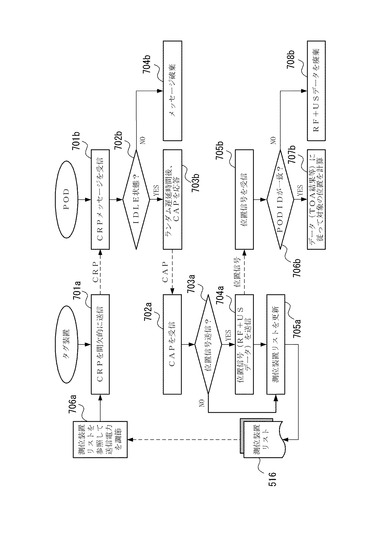
最初に、ステップ701aにおいて、タグ装置510は、チャネル要求手段511を用いてチャネル要求パケット(CRP)を間欠的に送信する。このCRPメッセージのデータ構造について図6に示す。図6に示すように、CRPメッセージは、CRP_TYPE601、TagID602を含んでいる。CRP_TYPE601はメッセージのタイプを識別するための情報、TagID602は、CRPを送信したタグ装置を識別するための識別情報である。CRPメッセージ送信は、隣接するPODに対して位置信号(すなわち、RF+USデータ)を送信する前に無線チャネルを要求するために使用される。本発明においては、チャネル要求手段511がCRPを送信(ブロードキャスト)する場合、様々な状況に応じてCRPの送信電力を適切に調節する必要がある。すなわち、チャネル要求手段511は、送信電力調整手段515によって調節された送信電力によってCRPメッセージを送信する。本実施の形態では、送信電力調整手段515は、測位装置リスト516の内容に従って適応的に送信電力を調節することができる。例えば、測位装置リスト516が空の場合、チャネル要求手段511は、CRP送信のためにデフォルトの送信電力P0を選択する。測位装置リスト516が空でなく、かつ、リストの最も近いPOD RnearestがIDLE状態であるならば、送信電力調整手段515は、チャネル要求手段511に、最も近くかつIDLE状態のPODに対して、CRPメッセージを送信させるよう送信電力を調節する。測位装置リスト516が空ではないが、リストの最も近いPODがBUSY状態ならば、送信電力調整手段515は、できるだけ近いPODの発見のためにより小さな送信電力を設定してCRPを送信する。ここで、一例として、タグ装置は、CRPメッセージの伝送時間を選択することが可能である。送信電力を下げた後にタグ装置が近くの測位装置を見つけ出すことができなければ、タグ装置は送信電力をそれ以上下げないで、リストの最も近いPOD RnearestがBUSY状態からIDLE状態に切り替わるのを待つ。その後、送信電力調整手段515は、チャネル要求手段511に、最も近いPODに対してCRPメッセージを送信させるよう送信電力を調節する。
【0036】
次に、ステップ701bにおいて、POD520は、CRPメッセージを受信する。CRPメッセージを受信すると、POD 520は、自身の状態がIDLE状態かどうかを判定する(ステップ702b)。IDLE状態でなければ、POD 520は、ステップ704bでメッセージを廃棄する。POD 520がIDLE状態であれば、状態応答手段521は、ランダム遅延時間後、チャネル割当てパケット(CAP)を応答として送信する。CAPメッセージのデータ構造を図6に示す。CAPメッセージは、CAP_TYPE603、PODID604、TagID605およびStatus606を含んでいる。CAP_TYPE603はメッセージタイプの識別のために使用される。PODID604は、CAPメッセージを送信したPODを識別するための識別情報である。TagID 605は、チャネルが割り当てられているタグ装置を識別するための識別情報である。すなわち、TagID 605は、CAPメッセージが応答しているCRPメッセージの送り手としてのタグ装置の識別情報である。Status606は、PODの状態がBUSY状態あるいはIDLE状態であるかを示す。CAP応答がタグ装置によって受信されると、タグ装置はPODとタグ装置間の距離およびPODの状態を識別することができる。
【0037】
ステップ702aにおいて、CAP応答は、PODの有効範囲内のすべてのタグ装置によって受信される。その後、CAPメッセージを受信したタグ装置は、送信判定手段512を用いて、PODが自身にチャネルを割り当てたかどうか、かつ位置信号(すなわちRF+USデータ)を送信することができるかどうかを判定する(ステップ703a)。例として、ステップ703aにおいて、送信判定手段512は、CAPメッセージに含まれるTagIDが自身の識別情報(例えば、ローカルアドレス)と一致するかどうかを判定する。もし一致すれば、そのタグ装置が既に送信したCRPメッセージに応じてこのCAPメッセージが生成され、また、PODがそのタグ装置に対してチャネルを割り当てたことを意味する。この場合、タグ装置は、測位信号送信手段513を使用して、対応するPODにRF+US(超音波)信号を送信する(ステップ704a)。その後、RF+USデータは、ステップ705bにおいて、オブジェクトの位置を計算するためにPODによって受信される。タグ装置がPODにRF+USデータを送信した後、タグ装置は、ステップ705aにおいて、測位装置リスト更新手段514を使用して、測位装置リスト516を更新する。同様に、ステップ703aで、タグ装置が、CAPメッセージがチャネル割り当てについてのメッセージではないと判定すると、タグ装置はRF+USデータを送信しない。しかしながら、この場合(ステップ703aで「NO」)でも、タグ装置は、記憶した測位装置リスト516を更新する必要がある。
【0038】
測位装置リスト516は、隣接するPODの情報をリアルタイムにモニタするためにタグ装置によって保存された動的リストである。測位装置リスト516は、CAPメッセージの内容に従って更新することができる。測位装置リスト516のデータ構造の例を、以下の表1に示す。
【表1】
ここで、NAVは、対応するPODのBUSY時間間隔を示している。
【0039】
測位装置リスト516に含まれる情報によって、タグ装置は、送信オブジェクトを素早く選択し、適応的に送信電力を調節することができる。
【0040】
タグ装置とPODの間の距離は、受信した信号強度(RSS)およびRF信号の自由空間伝搬モデルに基づいて測定される。
すなわち、距離=DRSSは以下の式で計算することができる。
【数3】
ここで、mはパス損失率を示す。P(d0)はある基準距離d0での信号電力である。また、PRSS は受信機での受信信号電力である。
【0041】
タグ装置がCAPメッセージを受信すると、測位装置リスト516が更新される。CAPメッセージを送信したPODが測位装置リスト516に含まれていなければ、タグ装置は測位装置リスト516に新たなPODエントリを追加する。そうでなければ、タグ装置は、CAPメッセージの内容に従って測位装置リスト516の対応するエントリを更新する。CAPメッセージが受信されると、測位装置リスト516における対応するPODエントリの最後の属性NAVは、50ミリ秒のように設定される。これは、次の50ミリ秒の間、PODがBUSY状態であることを意味している。
【0042】
図7に戻ると、測位装置リスト516は、CAPメッセージがチャネルの割り当てのためにタグ装置に関して生成されたかどうかによらず、PODからCAPメッセージを受信する度に更新される。ステップ706aにおいて、タグ装置の送信電力調整手段515は、測位装置リスト516を参照してCRPメッセージの送信電力を定期的に調節する。
【0043】
一例として、本発明においては、RF+US信号が測位信号として使用される。RF信号は時刻同期用に用いられ、US信号は距離測定のために用いられる。RF+USデータに基づく測位方法については、本発明が属する技術分野において一般に使用されている周知の技術であるので、詳細な説明はここでは省略する。ステップ706bにおいて、PODは、位置信号に含まれるPODIDが自身のIDと一致するかどうかを判定する。一致しなければ、PODはRF+USデータを廃棄する(ステップ708b)。一致すれば、ステップ707bにおいて、PODは、位置計算手段523を用いて、RF+USデータに従ってオブジェクトの位置を計算する。一例として、位置計算手段523は、US信号の到達時間(TOA)結果、到達時間差(TDOA)結果あるいは到達角(AOA)結果を利用することにより、オブジェクトの位置を計算することができる。これらのオブジェクト測位方法については、本発明が属する技術分野において周知であるので、それらの詳しい説明は省略する。
【0044】
図8および図9は、それぞれタグ装置側と測位装置POD側の動作処理を示している。
【0045】
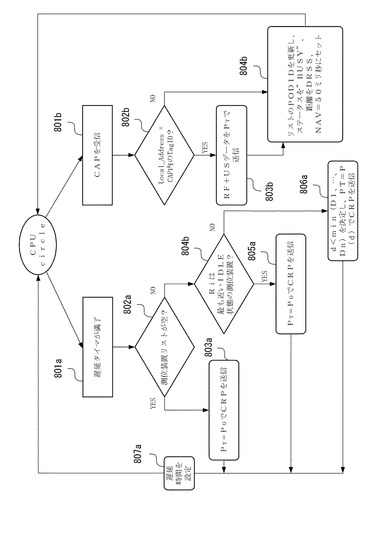
図8に示すように、タグ装置の動作処理は、主に2つの処理、すなわちCRPを送信とCAP処理に関係している。図8のフローチャートにおいて、ステップ801a〜806aがCRP送信処理に対応し、ステップ801b〜804bがCAP処理に対応している。CRP送信は、チャネル要求と適応的な電力制御の機能を実現する。CAP処理は、送信判定と測位装置リストのオンライン更新の機能を実現する。
1.CRP送信
【0046】
CRPメッセージは、タグ装置によって繰り返し送信(ブロードキャスト)される。タグ装置は各CRPメッセージを送信する前にランダム時間遅延させる。遅延タイマが満了すると(ステップ801a)、タグ装置のCPUは、タイマ満了イベントを処理するために割り込まれる。この時点で、CRPメッセージがチャネル要求のために送信される。上述したように、CRPの送信電力は、測位装置リスト516の現在の状態に従って適応的に選択される。送信電力の調節処理は以下のようになされる。
(1)タグ装置の測位装置リストが空であれば(ステップ802aで「YES」)、デフォルトの初期の送信電力P0がCRP送信のために選択される(ステップ803a)。それは、PT = P0とし、送信(ブロードキャスト)されたCRPを選択することを意味する。ここで、P0はデフォルトの送信電力である。
(2)測位装置リストが空でなければ(ステップ802aで「NO」)、ステップ804aで、リストにおいて最も近い測位装置POD RiがIDLE状態かどうかを判定する。最も近いPOD RiがIDLE状態ならば、タグ装置は、ステップ805aで、送信電力を調節し、最も近くかつIDLE状態のPOD Riに対してCRPを送信する。CRPの送信電力は、RF信号の伝播関数から導き出したタグ装置から最も近いPODへの距離に基づいて決定することができる。
(3)測位装置リストが空でなく(ステップ802aで「NO」)かつリストの最も近いPODがBUSY状態であれば(ステップ804aで「NO」)、送信電力調整手段515は、できるだけ近いPODの発見のためにより小さな送信電力を設定してCRPを送信する(ステップ806a)。例えば、リスト内の各PODの距離D1, D2…, Dnに従って、タグ装置は、より小さい通信距離d<min(D1、…、Dn)を決定し、PT=P(d)でCRPを送信する。ここで、P(d)は距離dをカバーする最小の電力である。このようにして、タグ装置は、未知でかつできるだけ近いPODを見つけ出すことができる。
【0047】
一度CRP送信を行った後、タグ装置は、次のCRP送信の前に、違うランダム遅延時間を設定する(ステップ807a)。
2.CAP処理
【0048】
図8で示されるように、CAPはタグ装置で割り込みイベントとして処理される。CAPは、あるタグ装置のチャネル要求に応じてあるPODから送信されたメッセージである。図6に示すように、CAPメッセージはそのペイロードに4つの変数を含んでいる。CAP_TYPE、PODID、TagIDおよびStatusである。PODIDは、CAPの送り主を示している。TagIDは、CAPが応答するタグを示している。Statusは、送り主であるPODの状態を示している。CAPは、チャネル割当てと測位装置リストの更新のために用いられる。CAPメッセージがタグ装置によって受信されると(ステップ801b)、様々な処理手順がCAPメッセージの内容に従って実行される。
【0049】
(1)CAPメッセージのTagIDが、タグ装置のLocal_Addressと同じであれば(ステップ802bで「YES」)、そのCAPがそのタグ装置のチャネル要求に応答していることを意味する。この場合、タグ装置は、RF+USデータを送信することを決定する(ステップ803b)。次に、ステップ804bにおいて、測位装置リストが、CAPメッセージの内容に従って更新される。タグ装置とPOD間の所定のRF+US送信によって、タグ装置は、PODが次の50ミリ秒の間BUSY状態であることを認識する。そして、PODの情報は、それに応じて測位装置リスト内で更新される。リストの更新処理は、例えば以下のようになされる。
a)PODが測位装置リストにおいて新規であれば、新たなエントリが、key=PODIDとしてリストに追加される。タグ装置からPODへの距離(Distance)がRSSIによって計測される。PODの状態がBUSY状態にセットされ、また、PODのNAVが50ミリ秒にセットされる。
b)PODが既に測位装置リストに存在すれば、その情報が更新される。距離(Distance)は最新の計測結果に戻される。状態はBUSY状態にセットされ、NAVは50ミリ秒にセットされる。
【0050】
(2)他方、CAPメッセージのTagIDがタグ装置のLocal_Addressと同じでなければ(ステップ802bで「NO」)、そのCAPが他のタグ装置のチャネル要求に応答していることを意味する。この場合、タグ装置はRF+USデータを送信しないが、測位装置リストを直ちに更新する(ステップ804b)。CAPメッセージによって、タグ装置は、他のタグ装置が次の50ミリ秒間PODと通信し、RSSIによって距離(Distance)が測定されることを認識しており、リストはそれに応じて更新される。リストの更新処理は、例えば以下のようになされる。
a)PODが測位装置リストにおいて新規であれば、新たなエントリが、key=PODIDとしてリストに追加される。タグ装置からPODへの距離がRSSIによって計測される。PODの状態がBUSY状態にセットされ、また、PODのNAVが50ミリ秒にセットされる。
b)PODが既に測位装置リストに存在すれば、その情報が更新されるだけである。距離(Distance)は最新の計測結果に戻される。状態はBUSY状態にセットされ、NAVは50ミリ秒にセットされる。
【0051】
上述したように、RF+USデータを送信するかどうかによらず、タグ装置内の測位装置リストを更新する必要がある。これは、タグ装置が連続的に近隣のPODの情報を更新するのに役立つ。タグ装置は、RF+USを送信することを決定すると、PODと通信しRF+USメッセージを送信する。RFの送信電力はCRPの送信電力と同じであり、CRP送信処理中に適応的に決定される。
【0052】
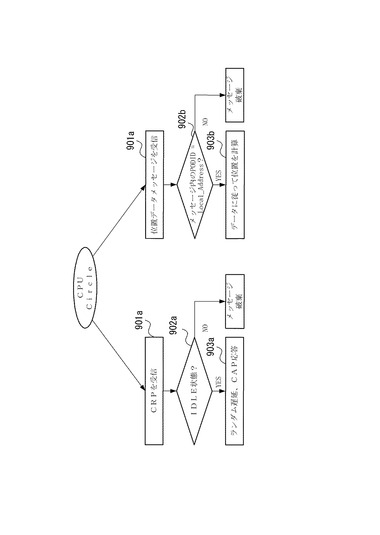
図9は、POD装置における動作手順を示す。PODによって受信されたメッセージのタイプに従って、動作図は、CRPメッセージ処理とRF+USデータ処理の2枝に分かれる。CRPメッセージとRF+USデータは両方とも割込みイベントとして処理される。
1.CRPメッセージ処理
【0053】
ステップ901aで、CRPメッセージ検出イベントが発生すると、CRPメッセージは、PODのStatusに応じて処理される。1)PODの現在の状態がIDLE状態であれば(ステップ902aで「YES」)、CAPメッセージは短いランダム遅延時間後に送出される(ステップ903a)。CAPメッセージにおいて、TagIDにCRPのTagIDがセットされ、StatusにIDLEがセットされる。CAPは、PODの状態を伝え、タグ装置のチャネルを割り当てるのに利用される。それはチャネル要求の成功を意味し、それによりタグ装置はRF+USデータを送信することができる。短いランダム遅延時間は、同時のCAP応答を回避して衝突を回避するために使用される。2)PODの状態がBUSY状態であれば(ステップ902aで「NO」)、CRPメッセージは廃棄破棄される。この場合、PODがBUSY状態である場合、CRPに応答するCAPはない。これは、PODがCAPを送信すれば、タグ装置に対してRF+USチャネルが適切に割り当てられることを保証する。
【0054】
CRPメッセージが受信されると、PODの状態に応じてCAPメッセージが応答されることが理解できるであろう。
2.RF+USデータ処理
【0055】
RF+USデータを受信すると(ステップ901b)、PODは、RFメッセージに含まれるPODIDがLocal_Address(ローカルアドレス)と同一であるかどうかをチェックする(ステップ902b)。同一であれば(結果が真であれば)、PODはRF+USデータに基づいてオブジェクトの位置を計算する。例えば、PODは、RF+USに基づいてTOAを測定し、タグ装置の位置を計算することが可能である。チェックの結果、RFメッセージのPODIDがLocal_Addressと異なれば、RF+USメッセージを単に廃棄する。これらの処理手続きを用いることにより、PODは、複数のタグ装置の位置を測位することが可能となる。
【0056】
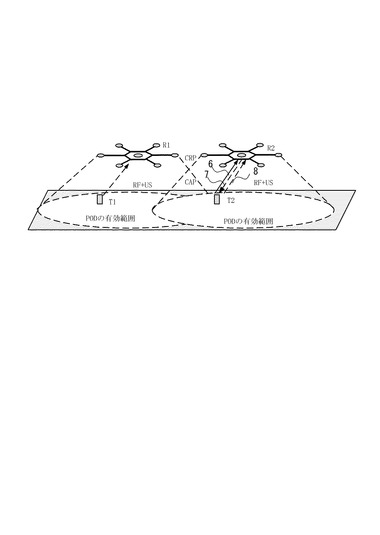
図10Aおよび10Bは、本発明による電力制御基づいたMACがどのように動作するかを説明する具体例を示している。この具体例においては、2つのタグ装置T1、T2と2つのPOD R1、R2の場合を示している。
【0057】
まず、図10Aを参照すると、初期状態において、両方のタグ装置T1、T2の測位装置リストは空である。図10Aにおいて、タグ装置T1は、図10Aにおいて太線のステップ1で示すように、最初にデフォルト電力レベルPT=P0でCRPメッセージを送信する。次に、POD R1はCRPを受信し、自身の状態をチェックする。IDLE状態であるので、POD R1は、図10Aにおける破線のステップ2で示すように、自身の状態を伝えるためにその有効範囲内内の全てのタグ装置(すなわち、T1とT2)にCAPを送信し、T1にチャネルを割り当てる。次いで、CAPメッセージがT1とT2によって受信される。CAPのTagID=T1であるので、T1にチャネルが割り当てられる。その後、図10Aにおける一点鎖線のステップ3で示すように、T1は電力PTでデータメッセージ(RF+US)を送信する。T1およびT2が両方ともPOD R1からCAPメッセージを受信するので、位置信号を送信するかを判定したかどうかによらず、それらは両方とも記憶された測位装置リストを更新する。タグ装置T1およびT2は、Status=Busy、NAV=50ms、Distance=DRSSIで、リストに新たなエントリR1を挿入する。測位装置R1は、T1からRF+USメッセージを受信し、TOAを検出し、T1からR1への距離を測定する。
【0058】
図10Bで示す状態において、測位装置R1はBUSY状態であり、また、R1はT1とT2の測位装置リストに既に含まれている。R1からのCAPメッセージで、TagID≠T2であるので、タグ装置T2はR1にデータを送信しない。タグ装置T2は、PT < PR1となるように、送信電力PTを下げる。ここで、PR1はR1に到達する電力レベルである。次に、図10Bにおける太線のステップ6で示すように、タグ装置T2は下げられた電力PTでCRPを送信する。この時、R2はT2からCRPを受信する。R2がIDLEであるので、図10Bにおける破線のステップ7で示すように、R2は、自身の状態を伝え、T2にチャネルを割り当てるためにCAPを送信する。CAPメッセージはT2によって受信される。CAPにおいてTagID=T2であるので、T2に無線チャネルが割り当てられる。これによって、図10Bにおける一点鎖線のステップ8で示すように、T2は電力PTでデータメッセージ(RF+US)を送信する。タグ装置T2は、Status=Busy、NAV=50ms、Distance=DRSSIで、リストに新たなエントリR2を挿入する。測位装置R2は、T2からのRS+USメッセージを受信し、TOAを検出し、T2からR2への距離を測定する。
【0059】
前述の説明は、本発明による電力制御基づいたMAC方法の具体例である。しかしながら、本発明の適用はこの具体例に限定されない。例えば、本発明は、さらに多数のタグ装置および測位装置を含む多重アクセスシステムに適用することも可能である。
【0060】
本発明による電力制御基づいたMAC方法は、前述のENおよびHN問題を効果的に解決することができる。
1.さらし端末(EN)問題の解決
【0061】
まず、式(2)で説明したEN問題の条件と図2Bに示した状況を振り返る。図2Bに示すように、T1, T2,
R1, R2がENノード条件を満たし、また、T1がR1と送信すると仮定する。CSMAなどのような先行技術においては、T2がT1の稼動中のトラフィックを検知するので、T2はR2と直接通信することができない。しかしながら、実際に、T1からR1およびT2からR2の2つの送信リンクが、衝突することなく同時に発生するかもしれない。このように、EN問題は、無線チャネルの無駄な消費を引き起こす。
【0062】
本発明による電力制御基づいたMAC方法においては、たとえT2がT1の稼動中のトラフィックを検知しても、キャリア検知がもはや送信判定の印ではないので、T2はそれにもかかわらず目的とするPOD R2にRF+USデータを送信する。すなわち、T2がT1の稼動中のトラフィックを検知できるけれども、タグ装置が互いの間で検知するかどうかにかかわらず、T2からR2への通信リンクは、CRP−CAP交換および測位装置リストの内容に従って今までどおり成功裏に確立することができる。より正確には、図2Bの具体例に関しては、T2における送信判定については2つのケースがある。
1)R1のCAPがT2によって受信されなければ、T2は測位装置リストに従ってCRPの送信電力を選択し、チャネルを要求するためにCRPを送信する。CRPがR2によって受信されると、R2は、T2にチャネルを割り当てるためにCAPを応答する。それにより、T1→R1およびT2→R1のリンクを同時に確立することができる。
2)R1のCAPがT2によって受信されれば、T2はR1のBusy状態を認識している。EN条件によれば、|T2-R2|<|T2-R1|であるに違いない。本発明のMAC方法の電力順応によれば、T2は、チャネルを要求するCRPを送信するための送信電力を下げる。CRPがR2によって受信されると、R2は、T2にチャネルを割り当てるためにCAPを応答する。これにより、T1→R1およびT2→R1のリンクが同時に確立される。
【0063】
両方のケースについて、EN条件の下で、2つのリンクを同時に成功裏に確立することができることが分かるであろう。このように、本発明による電力制御基づいたMAC方法は、効果的にEN問題を解決することができる。
2.暫定的な隠れ端末(HN)問題の解決
【0064】
式(1)で説明した隠れ端末(HN)の条件および図2Aに示した状況を振り返る。図2Aに示すように、CSMAなどのような先行技術においては、T1とT2は互いのトラフィックを検知することができないので、それらは、POD Rに同時に送信し、Rで信号衝突を引き起こすことになる。
【0065】
しかしながら、本発明のMAC方法においては、T1がRにCRPを送信すれば、RはCAPを応答する。ただCAPの有効範囲の半径をT1とT2の両方の送信半径より大きく設定する必要がある。その後、T1とT2の両方がRからCAPを受信する。このように、T1がRに送信すると、T2はCAPによってRがBUSY状態であると通知される。これにより、T1→Rのリンクでの信号衝突を回避するため、T2はRにメッセージを送信しない。従って、本発明のMAC方法では、HN問題を解決するための条件は以下のようになる。
【数4】
ここで、DCAPは、CAPパケットの通信半径である。実際の適用においては、本発明のMACが暫定的なHN解放となり、その条件が容易に満たされるように、タグ装置の最大の伝送距離より大きくなるDCAPを選択する。
【0066】
従って、本発明においては、いかなる時も全ての受信機が1つのみの送信機と通信されることを保証することができる。それにより、RFおよびUS衝突は起こらない。さらに、タグ装置sが最も近くかつIDLE状態のPODを巧妙に選択することができ、送信電力を適切に調節して他のタグ装置との干渉を回避することができるので、異なるタグ装置とPOD間で同時の接続が可能となる。従って、先行技術と比較して、時空間再使用が大幅に改善される。
【0067】
上述した実施の形態において、幾つかの特定のステップを例として示しかつ説明している。しかしながら、本発明の方法の工程は、これらの特定のステップに限定されない。当業者であれば、これらのステップを変更し、修正し、補完することができること、そしていくつかのステップの順番を、本発明の精神および本質的な特徴から外れずに変更することができることを十分に理解するであろう。
【0068】
以上、特定の実施の形態を参照して本発明を説明したが、本発明は、図面中で示される上記の特定の実施の形態および特定の構成に限定されない。例えば、示されたいくつかの構成要素は、1つの構成要素としてお互いと組み合わせるかもしれない。あるいは、1つの構成要素はいくつかのサブコンポーネントに分割されるかもしれないし、他の既知の構成要素も加えられるかもしれない。動作処理も実施例において示されるものに限定されない。当業者は、本発明が、本発明の精神および本質的な機能から外れずに、他の特定の形態で実装可能であることを理解するであろう。従って、現在の実施の形態は、全ての点において例示でありかつ限定的でないとして考慮されるべきである。本発明の範囲は、前述の説明によってではなく添付された請求項によって示される。また、したがって、請求項と同等の意味と範囲の内で生ずる変更は全て本発明の範囲に包含される。
【符号の説明】
【0069】
310:送信機
311:ランダム遅延手段
312:トラフィック検知手段
313:送信判定手段
314:信号送信手段
320:受信機
322:信号受信手段
323:位置計算手段
500:マルチオブジェクト測位システム
510:タグ装置(送信機)
511:チャネル要求手段
512:送信判定手段
513:測位信号送信手段
514:測位装置リスト更新手段
515:送信電力調整手段
516:測位装置リスト
520:測位装置(POD)
521:状態応答手段
522:測位信号受信手段
523:位置計算手段
【技術分野】
【0001】
本発明は、マルチオブジェクト測位システムの多重アクセス制御に関し、特に、自律型のオブジェクト測位システムにおいて複数のタグ装置を同時に追跡するための分散型電力制御に基づく多重アクセス制御方法に関する。
【背景技術】
【0002】
オブジェクト測位(位置測定)システムは、オフィス、ヘルスケア、セキュリティ、炭鉱、地下道、スマートビルディング(smart building)、レストランなどのような多くの適用エリアにおいて幅広い適用可能性のある技術である。成功する位置測定システムにとって必要不可欠な特徴は、多重アクセスコントロール性能である。この仕組みにより、複数の可動性のオブジェクトの位置を同時に特定することが可能となる。それは多くの位置測位に基づく用途にとって一般的な要求である。測位システムは、同時に全ての訪問者の位置を特定し、それに応じて案内情報を提供する。病院における患者、医者、および協力者の追跡に関しては、おそらく多くの患者、医者及び協力者が同じ手術室に同時に存在する。従って、測位システムによって複数のオブジェクトを同時に追跡することが不可欠である。オフィス、地下道、スマートビルディング、レストランなどの他の用途でも、複数のオブジェクトを同時に追跡することが必要とされる。
【0003】
これまで、複数の可動性のオブジェクトの追跡要求に対して、自律超音波屋内追跡システム(Autonomous Ultrasound Indoor Tracking System)(AUITS)が、高精度かつ高ロバスト(highly robust)で、客の立場を考えた屋内追跡システムとして提案されている。それは、1装置(POD)による測位の考えを利用し、超音波の到着時間(TOA:Time Of Arrival)を距離測量のために用いる。PODは固定トポロジー構造の測位装置であり、複数の超音波受信機を単一の装置に一体化し、利用者の要求に応じて至る所に設置することが可能である。PODはコンパクトな装置である(見た目はほとんどフリスビーのようである)。使用する場合、PODは傘の骨格のような数個の伸縮可能なロッドを広げることが可能であり、各ロッドの端に超音波受信機が設けられている。広がったPODのトポロジーが固定され、その受信機の座標を簡単に計算することができるため、超音波受信機の座標のマニュアルキャリブレーションは一切必要ない。加えて、受信機がすべて1つの装置上に存在しているので、複雑な無線通信ベースのシグナリングおよびネットワークプロトコルも必要ない。図1は、2つのPOD R1とR2を含むマルチオブジェクト測位システムを示している。AUITSシステムとPODの詳細については、2008年1月29日に本出願によって出願された中国特許出願No.200810006317.0号、「1つの装置(POD)による測位、自律超音波測位システムおよびPODを利用する方法(Positioning on One Device (POD) and
Autonomous Ultrasound Positioning System and Method Using the POD)」に説明されている。この先の出願は、それらの全体が参照の目的でここに組み込まれる。
【0004】
説明を簡単にするために、一例としてAUITSシステムおよびPOD測位装置を用いて本発明を説明する。しかしながら、本発明の原理および技術的解決法がAUITSシステムおよびPOD測位装置に限定されなことだけでなく、移動性のオブジェクト追跡の達成のために適切な機能を有する測位システムおよび装置であれば、他の共通の屋内測位システムおよび測位装置に適用することができることは、以下の詳細な説明から容易に理解されるはずである。
【0005】
図1に示すAUITSシステムの具体例は、複数のタグ装置および複数のPODを含んでいる。この具体例において、AUITSシステムは2つのPODおよび3つのタグ装置を含んでいる。PODは、設置の容易さおよびキャリブレーションの容易さを考慮して監視環境に取り付けられる構造上のトポロジーを備えた測位装置として設計されている。PODは、中央に位置するRF送受信機と周囲に広がる複数のUS受信機で構成されている。タグ装置T1、T2およびT3は、PODによって追跡される移動性のオブジェクトに取り付けられる。各タグ装置は、RF送受信機およびUS送信器からなる。AUITSシステムが使用されている時、図1で示されるように、タグ装置はPODにRFとUS(超音波)の信号を送信する。RF信号は、時刻同期およびタグ装置識別のために利用される。US(超音波)信号は、タグ装置と超音波受信機の間の距離を測定するために利用される。複数の超音波受信機に対する距離測量に基づいて、PODは、タグ装置(すなわち、オブジェクト)の位置は推測することができる。本発明は、主に、AUITSシステムなどのようなマルチオブジェクト測位システムの多重アクセスコントロール問題を解決するものである。
【0006】
AUITSシステムにおいて、多重アクセスコントロール(MAC)プロトコルの設計は非常に重大である。それは複数のPODがそれらの動作範囲において全てのタグ装置を正確かつ効率的に検出することを可能にする。特に、AUITSなどのようなマルチオブジェクト測位システムにとって、有効なMACプロトコルがなければ、いくつかの問題が提起されることになる。例えば、RFまたは超音波の送信中に信号の衝突が発生する可能性がある。それは、測位エラーに帰結するTOAの不正確な測定を引き起こすかもしれない。信号の衝突が発生すると、衝突した信号で占められていた時間が無駄になり、性能劣化に帰結する。また、より良い有効範囲およびより良い性能を実現するために、複数のPODを配置することもできるが、同時に複数のタグ装置を追跡することができないので、密に配置されたPODを十分に活用することはできない。よって、PODリソースが無駄になる。これらの問題は、AUITS適用における重大な課題を提起するだろう。しかしながら、それらはいくつかの主要な問題の一面である。効率的なMACプロトコルを設計するためには、重要な問題の背後に存在する本質を分析し対処する必要がある。例えば、以下に説明するような隠れ端末(HN)問題とさらし端末(EN)問題である。
【0007】
図2Aおよび図2Bは、HN問題とEN問題を説明するのための概略図である。
1.隠れ端末(Hidden Node:HN)問題
【0008】
MAC設計にとって信号の衝突を回避することは基本的な要求である。すなわち、MACは、HN問題(HN Problem)によって引き起こされる衝突するタグ装置からの同時通信を防止する。
【0009】
図2Aに示すように、2つのタグ装置T1、T2が同じ受信機R(例えば、POD)に同時に送信しているにもかかわらず、互いのトラフィックを感知できない場合に、HN問題が発生する。HN問題は測位エラーおよび性能低下を発生させる。タグ装置のキャリヤセンス半径をDCSと表し、タグ装置の送信距離をDTと表すと、HN問題の条件は、以下のようになる。
【数1】
【0010】
HN問題を解決する従来の方法は、DCS>2DTとなるように、DCSを大きくすることである。しかしながら、キャリヤセンス半径を大きくすることは他の重大な問題を引き起こす可能性がある、つまり、下記に紹介するさらし端末(EN)問題である。さらに、AUITSシステムについては、2種類の物理的な信号(RFとUS信号)がオブジェクト追跡のために利用される。従って、RFおよびUSチャネルの両方を、衝突防止プロトコル設計のために入念に考慮すべきである。さらに、RFとUSがタグ装置から常にペアで放出され、USの伝播速度(約340m/s)がRFより非常に遅くかつとUSが符号化されないことを考慮すると、それらの特徴は、MACプロトコル設計の過程において、互いに関連させ、かつ徹底的に考慮する必要がある。
2.さらし端末(Exposed Node:EN)問題
【0011】
信号衝突防止の他に、MACプロトコルにとって他の重要な要求は効率である。これは、理想的なMACプロトコルが、AUITSシステムが可能限り多くの複数のタグ装置sを同時に追跡することができるように、RFとUSのチャネルの時空間再利用を十分に活用することを意味する。これを達成するためには、MACプロトコルを、さらし端末(EN)問題を抑えるように設計すべきである。
【0012】
図2Bに示すように、あるリンクが現在のリンクのキャリア検知により妨げられた時、EN問題が起こる。しかしながら、この場合、目的とするリンクは現在のリンクと衝突しない。図2Bに示す例において、タグ装置T2が測位装置R2に送信したい場合、タグ装置T2は他のタグ装置T1の稼動中のトラフィックのキャリアを検知する。衝突を回避するために、T2はR2に送信しない。実際、T2からR2への送信はT1からR1への送信と衝突しない。このようにして、EN問題が発生する。EN問題は、PODリソースの無駄な消費および性能低下を引き起こす。EN問題の条件は以下の通りである。
【数2】
【0013】
HN問題の解決方法と反対に、EN問題を解決するこれまでの方法は、Dcsを下げることである。したがって、HNとENの問題を同時に解決するのに適したバランスを見つけ出すのは困難である。
【0014】
さらに、公平性(Fairness)もまた、MACプロトコル設計で考慮すべき重要な要素である。公平性の目的は、異なるタグ装置が統計的に同じ機会をもってAUITSシステムにおいて測位されることを可能にすることである。いくつかのタグ装置が頻繁に測位され、他のタグ装置はほとんど測位されないということは期待されない。
【0015】
以上の分析に基づいて、MACプロトコルを設計し開発することは、RF+US信号の信号の衝突を回避し、時空間再利用を改善、AUITSシステムの複数のタグ装置追跡に公平性を保つことは重要である。これらはまさに本発明の主要な目的である。
【0016】
搬送波感知多重アクセス/衝突回避方式(CSMA/CA)や時分割多元接続方式(TDMA)など、ネットワークおよび無線ネットワーク通信のために、1970年以降、多数のMACプロトコルが提案されている。上記のMAC設計の動機付け、モバイルノードと基地局間のデータ通信を遂行することにある。また、そのようなMACは、RFのみか、超音波のみに基づいた屋内測位システムなどのような単一の信号を有する測位システムには適用可能である。例えば、「RADAR:An In-Building RF-based User Location and
Tracking System(RFベースの利用者測位と追尾システムの構築)、P.Bahl.etc.、Proc.IEEE INFOCOM、2000」(非特許文献1)においては、RADARシステムが提案されている。RADARシステムは、802.11WLANと同じMACプロトコルを使用する、802.11の無線ネットワークにおいて受信した信号強度に基づいた測位システムである。さらに、「オブジェクトの位置決定のためのシステムおよび方法」というタイトルの国際公開 No.WO 03/087871 A1(特許文献1)の「Sonitor」システムは、部屋単位の位置精度を達成するための超音波のみの屋内測位システムを提供する。Sonitorのタグ装置は、リスニングエリアにある受信器に、20kHzから40kHzの超音波信号を送信する。特に、Sonitorシステムは、タグ装置に超音波チャネルを割り当てるために、超音波信号について搬送波検知多重アクセス方式技術を利用する。USチャネルが空いていれば、タグ装置は受信機に一意の信号を伝える。次に、受信機が信号を読み取り、到着時刻を検出し、次いで、中央のサーバにそれらの検出を転送する。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】国際公開 No.WO 03/087871 A1
【特許文献2】米国特許6,493,649号
【非特許文献】
【0018】
【非特許文献1】RADAR:An In-Building RF-based User Location and TrackingSystem(RFベースの利用者測位と追尾システムの構築)、P.Bahl.etc.、Proc.IEEE INFOCOM、2000
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、それらの従来のMACプロトコルは、多重信号に基づいた屋内測位システムに直ちに利用することができない。そのようなシステムでは、MACプロトコル設計のために異なる物理的な信号チャネルを一緒に考慮する必要がある。このことは、RFとUSの信号をオブジェクト追跡のために利用するAUITSシステムにおいて特に当てはまる。この問題を解決するために、最も関連する既存の解決法は、B.Nissankaらによる「クリケットシステム」である。このクリケット位置支援システムは、「モバイル・コンピューティングとネットワーキングに関する第6回国際会議の議事録(Proceedings of the Sixth International Conference on Mobile
Computing and Networking, Boston, Massachusetts, USA, August 2000)」に開示されている。上述した文献は、それらの全体が参照の目的で本明細書に組み込まれる。「クリケット」システムは、ビルディング内に設置された、互いに独立し、接続されてない複数の送信器を備える。各送信器はRF信号とUS信号の両方を送信することができる。図3は、クリケットシステムの概略構成を示すブロック図である。図3のシステムにおいては、送信機310と受信機320を示している。「クリケット」システムは、各送信機の伝送時間が、時間間隔[T1、T2]msの範囲内の一様分布で任意に選択されるランダム化に基づくMACプロトコル(randomization based MAC protocol)を利用する。図3に示すように、送信機310は、ランダム遅延手段311を用いることにより、異なるビーコン信号の伝送時間をセットする。したがって、異なるビーコンの送信は統計的に独立している。ランダム遅延後、送信機210のトラフィック検知手段312は、Dus時間の間RFキャリアを検知する。Dusは超音波が消滅すると予想される時間間隔である。このようにする目的は、RF+USの新たな送信と他の送信機からの現在のRF信号およびUS信号の間の衝突を防ぐことにある。Dusの間、送信判定手段313は、チャネルが空いているかどうかを判定する。Dusの間チャネルが空いていれば、送信判定手段313は、新たなRF+US信号を送信することを信号送信手段314に指示する。そうでなければ、チャネルが空になるまで、送信機はランダム遅延時間の間待ち続ける。図3は、また、測位装置側としての受信機320を示す。受信機320は、送信機からRF+US信号を受信する信号受信手段322と、検出結果に基づいてオブジェクトの位置を計算する位置計算手段323を含む。
【0020】
しかしながら、クリケットシステムで利用されるランダム化に基づくMACプロトコルは、HNとENの問題を解決することができない。まず、例として図2Aの場合を使用し、かつ図3に示すクリケットシステムのブロック図を参照して、HN問題に対するタイミング図を図4Aに示す。T1とT2は最初にランダム遅延を実行し、それから、Dus時間の間にRFキャリアを検知する。T1とT2の何れも、互いに送信信号を検知することができないので、それらは両方ともPOD Rに対して信号を送信することを決定する。T1とT2によって送信されたRF+US信号は、受信機Rで次々に衝突するだろう。確かに、「クリケット」システムは、HN問題に対して「廃棄する」方法を適用する。すなわち、受信機RがDusの間に1つ以上のRFメッセージを受信すると、受信機は、US信号がどのRFメッセージに対応するかを確認することができず、その時、受信機は、US信号とRFメッセージを廃棄する。この処理は信号混同によって引き起こされる測位エラーを除外することができるけれども、チャネル容量および資源活用効率はかなり低くなる。さらに、例として図2Bの場合を挙げると、クリケットシステムにはEN問題も存在する。図4Bに示すように、T1とT2は最初にランダム遅延を実行する。次に、T1はDus時間の間RFキャリアを検知し、POD R1にRF+US信号を送信することを決定する。その結果、経路LT1、R1を確立する。次に、T2はT1からのトラフィックを検知し、R2に対して信号を送信しない。このように、T2とR2の間の目的の送信は、キャリア検知によって禁止される。しかしながら、確かに、LT2、R2はLT1、R1と衝突しないけれども、チャネルリソースの無駄な消費につながる。このように、クリケットシステムにおいてはEN問題を解決する方法は言及されていない。
【0021】
他の関連する現存の解決法は、「オブジェクトの位置と他の情報を判定するための検出システム」というタイトルの米国特許6,493,649号(特許文献1)のBatシステムである。「バット」システムは、監視すべき部屋の天井に超音波受信機を配置する。これらの受信機は整列して配置され、有線ネットワークによってよって制御基地局に接続されている。超音波送信機は、追跡すべきオブジェクトに付けられている。Batシステムにおいては、位置決めのためのタイムスロットを割り当てた全てのオブジェクト送信機を登録する集中型のTDMAのようなMACプロトコルが利用される。周期的に、基地局はRF信号として識別情報を送信する。同時に、基地局はすべての接続している超音波受信機に有線ネットワークによって同期パルスを送信する。オブジェクトは送信された自身のIDを受信すると、超音波信号を発行する。Batシステムにおいて提示されたTDMAのようなプロトコルについては、1)集中型の基地局を維持するのに多大なコストと労力を必要とする、2)全てのオブジェクトタグをシステムブートストラップ段階(system bootstrap phase)で登録しなければならない、という問題を有している。稼働しているシステムに新たなタグ装置を追加するのは困難である。したがって、システムの柔軟性は十分とは言えない。さらに、Batシステムにとって重要な問題は、リソースの低い時空間再利用性である。個々のオブジェクトタグ装置を追跡するためには、タイムスロットにおいて特定のタグが信号を送出するのを全ての測位装置が待ち合わせる必要がある。しかしながら、実際上、そのようなタグ装置からの信号を検知するのは測位装置のごく僅かであり、他の多くの測位装置はその期間中常にIDLE状態のままである。
【課題を解決するための手段】
【0022】
本発明は、複数のオブジェクトの追跡と測位のための電力制御ベースの多重アクセス制御方法及びシステムを供給する。また、本発明は、複数のPODおよび複数のタグ装置の追跡計画のためのMACプロトコルを提供する。その本発明の目的は、先行技術における測位信号の衝突(RFおよび超音波信号の両方)を回避し、無線チャネルの時空間の再使用を改善し、ENとHNの問題を解消することである。
【0023】
本発明の第1の態様によれば、オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含むマルチオブジェクト測位システムのための電力制御基づく多重アクセスコントロール方法であって、各タグ装置が測位装置の状態情報を記録する測位装置リストを記憶する記憶ユニットを含み、前記タグ装置が、チャネル要求パケット(CRP)を間欠的に送信するステップと、idle状態でかつ前記CRPを受信した測位装置が、有効範囲内に、前記測位装置によって受信した前記CRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に前記測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信するステップと、前記CAPを受信したタグ装置が、前記CAPの内容に応じて記憶した前記測位装置リストを更新するステップと、前記タグ装置が測位装置リストを参照してCRPの送信電力を調節するステップとを含む。さらに、他の態様では、CRPを受信したタグ装置が、CRPに含まれるタグ装置の識別情報(TagID)が自身の識別情報と一致すると判定すると、位置信号(RF+US信号)の送信を開始する。測位装置(例えばPOD)は、受信した位置信号を使用することによりオブジェクトの位置を計算する。
【0024】
本発明の第2の態様によれば、電力制御に基づく多重アクセスコントロールを実行可能なマルチオブジェクト測位システムであって、オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含み、前記タグ装置は、前記測位装置の状態情報を記録する測位装置リストを記憶する記憶手段と、チャネル要求パケット(CRP)を間欠的に送信するチャネル要求手段と、前記測位装置から受信したチャネル割当てパケット(CAP)の内容に基づいて前記測位装置リストを更新する測位装置リスト更新手段と、前記測位装置リストを参照して前記CRPの送信電力を調節する送信電力調整手段とを備え、前記測位装置は、前記タグ装置からの前記CRPを受信し、Idle状態の場合に、有効範囲内に、前記測位装置によって受信した前記CRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に前記測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信する状態応答手段を備える。
【0025】
マルチオブジェクト測位システムにおいて、タグ装置は、追跡される移動性のオブジェクトに取り付けられる。また、各タグ装置はRF送受信機およびUS送信機を含む。例として、複数のPODが、測位装置として監視環境に取り付けられる。上述したように、各PODは中央にRF送受信機を備え、周囲に幾つかのUS受信機を備える。また、PODは固定トポロジー構造を有する。PODは、ここで例として説明され、本発明の範囲を限定しない。本発明の技術分野において周知の他の測位装置に本発明の原理を同様に適用できることは当業者であれば理解できるであろう。先行技術と比較し、本発明の重要な点は、付近の測位装置(例えば、POD)の状態をタグ装置に知らせるための手法を提供することである。これにより、タグ装置は、最も近くかつIDLE状態のPODにRF+US信号を送信するために送信電力を適切に調節することができる。この方法によって、衝突を回避しながら、RFとUSチャネルを十分に活用することができる。タグ装置を高性能にする本発明の手法は、PODとタグ装置間のオンラインCRP−CAP交換処理によって、付近のPOD情報を記録するために全てのタグ装置に測位装置リストを保存することである。このリストは全てのタグ装置にセットされ、間断なく更新される。リストのPODの状態に従って、タグ装置は、いつ送信するか、かつ適切に送信電力を選択するかを自主的に判定することができる。
【0026】
ブートストラップ段階において、全てのタグ装置の測位装置リストは空である。CRPの送信電力はデフォルトである。RF+USデータの送信の前に、全てのタグ装置は、測定要求に対してチャネル要求パケット(CRP)を送信するためにRFチャネルに参加する。CRPがPODによって受信されると、PODは、すぐに、その動作範囲内の全てのタグ装置にチャネル割当てパケット(CAP)を応答する。CAPの目的は次の2つである。
1)位置測定のためのRF+USを発行することをCRPを送信するタグ装置に命じること(言いかえれば、チャネルはこのタグ装置に割り当てられる)。
2)割り当てられたタグ装置によるRF+US送信の期間中、PODがBUSY状態であることを他の全てのタグ装置に通知すること。
CAPに基づいて、チャネルが割り当てられたタグ装置とチャネルを割り当てられないタグ装置の両方が、個々の測位装置リストにおけるPODの情報を更新することができる。リストにおいて、POD情報は、PODID、PODまでの距離、POD状態などを含む。PODまでの距離は、例えば、RF信号の無線信号強度(RSS:Radio Signal Strength)によって測定される。また、PODIDおよびPOD状態はCAPメッセージの内容から認識される。次に、チャネルを割り当てられないタグ装置は、送信電力を下げて、他の近隣のPODからのチャネル割当てのためにCRPを送信し続ける。送信電力を低下させる目的は次の2つである。
1)より近いPODと見つけ出すために通信距離を短縮すること。
2)現在稼動中のRF+USの送信との衝突を回避すること。
PODとタグ装置間の数回のCRP−CAP交換によって、各タグ装置は近隣のPODを全て見つけ出し、間断なくオンラインで更新された測位装置リストを構築することができる。各CRP送信に対して、測位装置リストが空でない場合、タグ装置は、適切に送信電力を選択して位置測定要求のために最も近いPODにCRPを発行する。
【0027】
PODとタグ装置間のCRP−CAP交換により、CAPの送信半径が条件を満たす場合、HN問題を解決することができる。より正確には、CAPの送信半径がCRPの最大の伝送距離より大きければ、本発明のMAC方法はHN問題を解決できる。従って、本発明のMAC方法は、衝突するタグ装置からの同時通信を効果的に防ぐことができる。HN問題に対する本発明の解決方法については、後述する説明において詳細に説明する。
【0028】
また、本発明のMAC方法において、キャリア検知はもはや送信決定ための印とならない。CRP−CAPに基づいたチャネル割当て手順では、伝送リンクが衝突しない場合、適切な送信電力選択によって全ての送信を同時に確立することができる。このことは、本発明のMAC方法によってEN問題を解決できることを示す。これにより、本発明のMAC方法は、複数PODシステムにおいて複数のタグ装置の同時位置測位を可能にする。EN問題に対する本発明の解決方法については、後述する説明において詳細に説明する。
【発明の効果】
【0029】
本発明においては、各受信機が常に1つの送信器だけと通信することを保証することができる。この結果、RFおよびUSの衝突が発生しない。
【0030】
さらに、タグ装置が素早く最も近くかつIDLE状態のPODを選択することができ、かつ他のタグ装置に対する干渉を回避するよう適切に送信電力を調節することができるので、異なるタグ装置とPOD間における同時接続が可能となる。このため、先行技術と比較して、時空間の再使用が非常に改善される。
【図面の簡単な説明】
【0031】
本発明の前述した特徴及び他の特徴は、添附の図面を参照した以下の説明からより明らかになるであろう。
【図1】マルチオブジェクト測位システムを示すのための概略図である。
【図2A】隠れ端末(HN)問題についての説明のために概略図である。
【図2B】さらし端末(EN)問題についての説明のために概略図である。
【図3】関連技術によるマルチオブジェクト測位システムの構成を示すブロック図である。
【図4A】図3に示すシステムがHN問題に直面する場合を説明するタイミングチャートである。
【図4B】図3に示すシステムがEN問題に直面する場合を説明するタイミングチャートである。
【図5】本発明による電力制御に基づく多重アクセスコントロール実現するマルチオブジェクト測位システム500の構成を示すブロック図である。
【図6】チャネル要求パケット(CRP)およびチャネル割当てパケット(CAP)メッセージのデータ構造例を示す図である。
【図7】図5に示すシステムの動作手順を示すのためのフローチャートである。
【図8】タグ装置側の動作手順を示すのためのフローチャートである。
【図9】測位装置(POD)側の動作手順を示すのためのフローチャートである。
【図10A】本発明による、2つのタグ装置T1、T2と2つの測位装置POD R1、R2を含むマルチオブジェクト測位システムの動作手順の具体例を示す図である。
【図10B】本発明による、2つのタグ装置T1、T2と2つの測位装置POD R1、R2を含むマルチオブジェクト測位システムの動作手順の具体例を示す図である。
【発明を実施するための形態】
【0032】
図5は、本発明によるマルチオブジェクト測位システム500の構成を示すブロック図である。このマルチオブジェクト測位システム500は、電力制御に基づく多重アクセスコントロールを実現することができる。説明を簡素化するため、図5では、1つのタグ装置(送信器)510と1つの測位装置(受信機)520との間の相互関係だけを示している。しかしながら、システム500は1つ以上のタグ装置および測位装置を含むことが可能である。ここで、測位装置520は例えばPOD装置である。システム500において、タグ装置510は、追跡する移動性のオブジェクトに取り付けられる。また、タグ装置は、それぞれRF送受信機およびUS送信機(図示しない)を含むことができる。複数のPOD520は、監視環境において複数の移動性のオブジェクトを追跡し位置を特定するのために、監視環境(例えば、天井等)に取り付けられる。PODは、中央に位置するRF送受信機と周囲に広がる複数の超音波受信機(図示しない)で構成される。
【0033】
図5に示すように、タグ装置510は、チャネル要求手段511と、送信判定手段512と、測位信号送信手段513と、測位装置リスト更新手段514と、送信電力調整手段515と、隣接するPODの状態を記録する測位装置リスト516とを含む。対応して、測位装置(POD)520は、状態応答手段521、測位信号受信手段522および位置計算手段523を含む。
【0034】
図7は、図5に示すシステム500の動作手順を示すのためのフローチャートである。以下に、本発明による電力制御に基づく多重アクセスコントロールを実現するマルチオブジェクト測位システム500の機能について説明する。
【0035】
最初に、ステップ701aにおいて、タグ装置510は、チャネル要求手段511を用いてチャネル要求パケット(CRP)を間欠的に送信する。このCRPメッセージのデータ構造について図6に示す。図6に示すように、CRPメッセージは、CRP_TYPE601、TagID602を含んでいる。CRP_TYPE601はメッセージのタイプを識別するための情報、TagID602は、CRPを送信したタグ装置を識別するための識別情報である。CRPメッセージ送信は、隣接するPODに対して位置信号(すなわち、RF+USデータ)を送信する前に無線チャネルを要求するために使用される。本発明においては、チャネル要求手段511がCRPを送信(ブロードキャスト)する場合、様々な状況に応じてCRPの送信電力を適切に調節する必要がある。すなわち、チャネル要求手段511は、送信電力調整手段515によって調節された送信電力によってCRPメッセージを送信する。本実施の形態では、送信電力調整手段515は、測位装置リスト516の内容に従って適応的に送信電力を調節することができる。例えば、測位装置リスト516が空の場合、チャネル要求手段511は、CRP送信のためにデフォルトの送信電力P0を選択する。測位装置リスト516が空でなく、かつ、リストの最も近いPOD RnearestがIDLE状態であるならば、送信電力調整手段515は、チャネル要求手段511に、最も近くかつIDLE状態のPODに対して、CRPメッセージを送信させるよう送信電力を調節する。測位装置リスト516が空ではないが、リストの最も近いPODがBUSY状態ならば、送信電力調整手段515は、できるだけ近いPODの発見のためにより小さな送信電力を設定してCRPを送信する。ここで、一例として、タグ装置は、CRPメッセージの伝送時間を選択することが可能である。送信電力を下げた後にタグ装置が近くの測位装置を見つけ出すことができなければ、タグ装置は送信電力をそれ以上下げないで、リストの最も近いPOD RnearestがBUSY状態からIDLE状態に切り替わるのを待つ。その後、送信電力調整手段515は、チャネル要求手段511に、最も近いPODに対してCRPメッセージを送信させるよう送信電力を調節する。
【0036】
次に、ステップ701bにおいて、POD520は、CRPメッセージを受信する。CRPメッセージを受信すると、POD 520は、自身の状態がIDLE状態かどうかを判定する(ステップ702b)。IDLE状態でなければ、POD 520は、ステップ704bでメッセージを廃棄する。POD 520がIDLE状態であれば、状態応答手段521は、ランダム遅延時間後、チャネル割当てパケット(CAP)を応答として送信する。CAPメッセージのデータ構造を図6に示す。CAPメッセージは、CAP_TYPE603、PODID604、TagID605およびStatus606を含んでいる。CAP_TYPE603はメッセージタイプの識別のために使用される。PODID604は、CAPメッセージを送信したPODを識別するための識別情報である。TagID 605は、チャネルが割り当てられているタグ装置を識別するための識別情報である。すなわち、TagID 605は、CAPメッセージが応答しているCRPメッセージの送り手としてのタグ装置の識別情報である。Status606は、PODの状態がBUSY状態あるいはIDLE状態であるかを示す。CAP応答がタグ装置によって受信されると、タグ装置はPODとタグ装置間の距離およびPODの状態を識別することができる。
【0037】
ステップ702aにおいて、CAP応答は、PODの有効範囲内のすべてのタグ装置によって受信される。その後、CAPメッセージを受信したタグ装置は、送信判定手段512を用いて、PODが自身にチャネルを割り当てたかどうか、かつ位置信号(すなわちRF+USデータ)を送信することができるかどうかを判定する(ステップ703a)。例として、ステップ703aにおいて、送信判定手段512は、CAPメッセージに含まれるTagIDが自身の識別情報(例えば、ローカルアドレス)と一致するかどうかを判定する。もし一致すれば、そのタグ装置が既に送信したCRPメッセージに応じてこのCAPメッセージが生成され、また、PODがそのタグ装置に対してチャネルを割り当てたことを意味する。この場合、タグ装置は、測位信号送信手段513を使用して、対応するPODにRF+US(超音波)信号を送信する(ステップ704a)。その後、RF+USデータは、ステップ705bにおいて、オブジェクトの位置を計算するためにPODによって受信される。タグ装置がPODにRF+USデータを送信した後、タグ装置は、ステップ705aにおいて、測位装置リスト更新手段514を使用して、測位装置リスト516を更新する。同様に、ステップ703aで、タグ装置が、CAPメッセージがチャネル割り当てについてのメッセージではないと判定すると、タグ装置はRF+USデータを送信しない。しかしながら、この場合(ステップ703aで「NO」)でも、タグ装置は、記憶した測位装置リスト516を更新する必要がある。
【0038】
測位装置リスト516は、隣接するPODの情報をリアルタイムにモニタするためにタグ装置によって保存された動的リストである。測位装置リスト516は、CAPメッセージの内容に従って更新することができる。測位装置リスト516のデータ構造の例を、以下の表1に示す。
【表1】
ここで、NAVは、対応するPODのBUSY時間間隔を示している。
【0039】
測位装置リスト516に含まれる情報によって、タグ装置は、送信オブジェクトを素早く選択し、適応的に送信電力を調節することができる。
【0040】
タグ装置とPODの間の距離は、受信した信号強度(RSS)およびRF信号の自由空間伝搬モデルに基づいて測定される。
すなわち、距離=DRSSは以下の式で計算することができる。
【数3】
ここで、mはパス損失率を示す。P(d0)はある基準距離d0での信号電力である。また、PRSS は受信機での受信信号電力である。
【0041】
タグ装置がCAPメッセージを受信すると、測位装置リスト516が更新される。CAPメッセージを送信したPODが測位装置リスト516に含まれていなければ、タグ装置は測位装置リスト516に新たなPODエントリを追加する。そうでなければ、タグ装置は、CAPメッセージの内容に従って測位装置リスト516の対応するエントリを更新する。CAPメッセージが受信されると、測位装置リスト516における対応するPODエントリの最後の属性NAVは、50ミリ秒のように設定される。これは、次の50ミリ秒の間、PODがBUSY状態であることを意味している。
【0042】
図7に戻ると、測位装置リスト516は、CAPメッセージがチャネルの割り当てのためにタグ装置に関して生成されたかどうかによらず、PODからCAPメッセージを受信する度に更新される。ステップ706aにおいて、タグ装置の送信電力調整手段515は、測位装置リスト516を参照してCRPメッセージの送信電力を定期的に調節する。
【0043】
一例として、本発明においては、RF+US信号が測位信号として使用される。RF信号は時刻同期用に用いられ、US信号は距離測定のために用いられる。RF+USデータに基づく測位方法については、本発明が属する技術分野において一般に使用されている周知の技術であるので、詳細な説明はここでは省略する。ステップ706bにおいて、PODは、位置信号に含まれるPODIDが自身のIDと一致するかどうかを判定する。一致しなければ、PODはRF+USデータを廃棄する(ステップ708b)。一致すれば、ステップ707bにおいて、PODは、位置計算手段523を用いて、RF+USデータに従ってオブジェクトの位置を計算する。一例として、位置計算手段523は、US信号の到達時間(TOA)結果、到達時間差(TDOA)結果あるいは到達角(AOA)結果を利用することにより、オブジェクトの位置を計算することができる。これらのオブジェクト測位方法については、本発明が属する技術分野において周知であるので、それらの詳しい説明は省略する。
【0044】
図8および図9は、それぞれタグ装置側と測位装置POD側の動作処理を示している。
【0045】
図8に示すように、タグ装置の動作処理は、主に2つの処理、すなわちCRPを送信とCAP処理に関係している。図8のフローチャートにおいて、ステップ801a〜806aがCRP送信処理に対応し、ステップ801b〜804bがCAP処理に対応している。CRP送信は、チャネル要求と適応的な電力制御の機能を実現する。CAP処理は、送信判定と測位装置リストのオンライン更新の機能を実現する。
1.CRP送信
【0046】
CRPメッセージは、タグ装置によって繰り返し送信(ブロードキャスト)される。タグ装置は各CRPメッセージを送信する前にランダム時間遅延させる。遅延タイマが満了すると(ステップ801a)、タグ装置のCPUは、タイマ満了イベントを処理するために割り込まれる。この時点で、CRPメッセージがチャネル要求のために送信される。上述したように、CRPの送信電力は、測位装置リスト516の現在の状態に従って適応的に選択される。送信電力の調節処理は以下のようになされる。
(1)タグ装置の測位装置リストが空であれば(ステップ802aで「YES」)、デフォルトの初期の送信電力P0がCRP送信のために選択される(ステップ803a)。それは、PT = P0とし、送信(ブロードキャスト)されたCRPを選択することを意味する。ここで、P0はデフォルトの送信電力である。
(2)測位装置リストが空でなければ(ステップ802aで「NO」)、ステップ804aで、リストにおいて最も近い測位装置POD RiがIDLE状態かどうかを判定する。最も近いPOD RiがIDLE状態ならば、タグ装置は、ステップ805aで、送信電力を調節し、最も近くかつIDLE状態のPOD Riに対してCRPを送信する。CRPの送信電力は、RF信号の伝播関数から導き出したタグ装置から最も近いPODへの距離に基づいて決定することができる。
(3)測位装置リストが空でなく(ステップ802aで「NO」)かつリストの最も近いPODがBUSY状態であれば(ステップ804aで「NO」)、送信電力調整手段515は、できるだけ近いPODの発見のためにより小さな送信電力を設定してCRPを送信する(ステップ806a)。例えば、リスト内の各PODの距離D1, D2…, Dnに従って、タグ装置は、より小さい通信距離d<min(D1、…、Dn)を決定し、PT=P(d)でCRPを送信する。ここで、P(d)は距離dをカバーする最小の電力である。このようにして、タグ装置は、未知でかつできるだけ近いPODを見つけ出すことができる。
【0047】
一度CRP送信を行った後、タグ装置は、次のCRP送信の前に、違うランダム遅延時間を設定する(ステップ807a)。
2.CAP処理
【0048】
図8で示されるように、CAPはタグ装置で割り込みイベントとして処理される。CAPは、あるタグ装置のチャネル要求に応じてあるPODから送信されたメッセージである。図6に示すように、CAPメッセージはそのペイロードに4つの変数を含んでいる。CAP_TYPE、PODID、TagIDおよびStatusである。PODIDは、CAPの送り主を示している。TagIDは、CAPが応答するタグを示している。Statusは、送り主であるPODの状態を示している。CAPは、チャネル割当てと測位装置リストの更新のために用いられる。CAPメッセージがタグ装置によって受信されると(ステップ801b)、様々な処理手順がCAPメッセージの内容に従って実行される。
【0049】
(1)CAPメッセージのTagIDが、タグ装置のLocal_Addressと同じであれば(ステップ802bで「YES」)、そのCAPがそのタグ装置のチャネル要求に応答していることを意味する。この場合、タグ装置は、RF+USデータを送信することを決定する(ステップ803b)。次に、ステップ804bにおいて、測位装置リストが、CAPメッセージの内容に従って更新される。タグ装置とPOD間の所定のRF+US送信によって、タグ装置は、PODが次の50ミリ秒の間BUSY状態であることを認識する。そして、PODの情報は、それに応じて測位装置リスト内で更新される。リストの更新処理は、例えば以下のようになされる。
a)PODが測位装置リストにおいて新規であれば、新たなエントリが、key=PODIDとしてリストに追加される。タグ装置からPODへの距離(Distance)がRSSIによって計測される。PODの状態がBUSY状態にセットされ、また、PODのNAVが50ミリ秒にセットされる。
b)PODが既に測位装置リストに存在すれば、その情報が更新される。距離(Distance)は最新の計測結果に戻される。状態はBUSY状態にセットされ、NAVは50ミリ秒にセットされる。
【0050】
(2)他方、CAPメッセージのTagIDがタグ装置のLocal_Addressと同じでなければ(ステップ802bで「NO」)、そのCAPが他のタグ装置のチャネル要求に応答していることを意味する。この場合、タグ装置はRF+USデータを送信しないが、測位装置リストを直ちに更新する(ステップ804b)。CAPメッセージによって、タグ装置は、他のタグ装置が次の50ミリ秒間PODと通信し、RSSIによって距離(Distance)が測定されることを認識しており、リストはそれに応じて更新される。リストの更新処理は、例えば以下のようになされる。
a)PODが測位装置リストにおいて新規であれば、新たなエントリが、key=PODIDとしてリストに追加される。タグ装置からPODへの距離がRSSIによって計測される。PODの状態がBUSY状態にセットされ、また、PODのNAVが50ミリ秒にセットされる。
b)PODが既に測位装置リストに存在すれば、その情報が更新されるだけである。距離(Distance)は最新の計測結果に戻される。状態はBUSY状態にセットされ、NAVは50ミリ秒にセットされる。
【0051】
上述したように、RF+USデータを送信するかどうかによらず、タグ装置内の測位装置リストを更新する必要がある。これは、タグ装置が連続的に近隣のPODの情報を更新するのに役立つ。タグ装置は、RF+USを送信することを決定すると、PODと通信しRF+USメッセージを送信する。RFの送信電力はCRPの送信電力と同じであり、CRP送信処理中に適応的に決定される。
【0052】
図9は、POD装置における動作手順を示す。PODによって受信されたメッセージのタイプに従って、動作図は、CRPメッセージ処理とRF+USデータ処理の2枝に分かれる。CRPメッセージとRF+USデータは両方とも割込みイベントとして処理される。
1.CRPメッセージ処理
【0053】
ステップ901aで、CRPメッセージ検出イベントが発生すると、CRPメッセージは、PODのStatusに応じて処理される。1)PODの現在の状態がIDLE状態であれば(ステップ902aで「YES」)、CAPメッセージは短いランダム遅延時間後に送出される(ステップ903a)。CAPメッセージにおいて、TagIDにCRPのTagIDがセットされ、StatusにIDLEがセットされる。CAPは、PODの状態を伝え、タグ装置のチャネルを割り当てるのに利用される。それはチャネル要求の成功を意味し、それによりタグ装置はRF+USデータを送信することができる。短いランダム遅延時間は、同時のCAP応答を回避して衝突を回避するために使用される。2)PODの状態がBUSY状態であれば(ステップ902aで「NO」)、CRPメッセージは廃棄破棄される。この場合、PODがBUSY状態である場合、CRPに応答するCAPはない。これは、PODがCAPを送信すれば、タグ装置に対してRF+USチャネルが適切に割り当てられることを保証する。
【0054】
CRPメッセージが受信されると、PODの状態に応じてCAPメッセージが応答されることが理解できるであろう。
2.RF+USデータ処理
【0055】
RF+USデータを受信すると(ステップ901b)、PODは、RFメッセージに含まれるPODIDがLocal_Address(ローカルアドレス)と同一であるかどうかをチェックする(ステップ902b)。同一であれば(結果が真であれば)、PODはRF+USデータに基づいてオブジェクトの位置を計算する。例えば、PODは、RF+USに基づいてTOAを測定し、タグ装置の位置を計算することが可能である。チェックの結果、RFメッセージのPODIDがLocal_Addressと異なれば、RF+USメッセージを単に廃棄する。これらの処理手続きを用いることにより、PODは、複数のタグ装置の位置を測位することが可能となる。
【0056】
図10Aおよび10Bは、本発明による電力制御基づいたMACがどのように動作するかを説明する具体例を示している。この具体例においては、2つのタグ装置T1、T2と2つのPOD R1、R2の場合を示している。
【0057】
まず、図10Aを参照すると、初期状態において、両方のタグ装置T1、T2の測位装置リストは空である。図10Aにおいて、タグ装置T1は、図10Aにおいて太線のステップ1で示すように、最初にデフォルト電力レベルPT=P0でCRPメッセージを送信する。次に、POD R1はCRPを受信し、自身の状態をチェックする。IDLE状態であるので、POD R1は、図10Aにおける破線のステップ2で示すように、自身の状態を伝えるためにその有効範囲内内の全てのタグ装置(すなわち、T1とT2)にCAPを送信し、T1にチャネルを割り当てる。次いで、CAPメッセージがT1とT2によって受信される。CAPのTagID=T1であるので、T1にチャネルが割り当てられる。その後、図10Aにおける一点鎖線のステップ3で示すように、T1は電力PTでデータメッセージ(RF+US)を送信する。T1およびT2が両方ともPOD R1からCAPメッセージを受信するので、位置信号を送信するかを判定したかどうかによらず、それらは両方とも記憶された測位装置リストを更新する。タグ装置T1およびT2は、Status=Busy、NAV=50ms、Distance=DRSSIで、リストに新たなエントリR1を挿入する。測位装置R1は、T1からRF+USメッセージを受信し、TOAを検出し、T1からR1への距離を測定する。
【0058】
図10Bで示す状態において、測位装置R1はBUSY状態であり、また、R1はT1とT2の測位装置リストに既に含まれている。R1からのCAPメッセージで、TagID≠T2であるので、タグ装置T2はR1にデータを送信しない。タグ装置T2は、PT < PR1となるように、送信電力PTを下げる。ここで、PR1はR1に到達する電力レベルである。次に、図10Bにおける太線のステップ6で示すように、タグ装置T2は下げられた電力PTでCRPを送信する。この時、R2はT2からCRPを受信する。R2がIDLEであるので、図10Bにおける破線のステップ7で示すように、R2は、自身の状態を伝え、T2にチャネルを割り当てるためにCAPを送信する。CAPメッセージはT2によって受信される。CAPにおいてTagID=T2であるので、T2に無線チャネルが割り当てられる。これによって、図10Bにおける一点鎖線のステップ8で示すように、T2は電力PTでデータメッセージ(RF+US)を送信する。タグ装置T2は、Status=Busy、NAV=50ms、Distance=DRSSIで、リストに新たなエントリR2を挿入する。測位装置R2は、T2からのRS+USメッセージを受信し、TOAを検出し、T2からR2への距離を測定する。
【0059】
前述の説明は、本発明による電力制御基づいたMAC方法の具体例である。しかしながら、本発明の適用はこの具体例に限定されない。例えば、本発明は、さらに多数のタグ装置および測位装置を含む多重アクセスシステムに適用することも可能である。
【0060】
本発明による電力制御基づいたMAC方法は、前述のENおよびHN問題を効果的に解決することができる。
1.さらし端末(EN)問題の解決
【0061】
まず、式(2)で説明したEN問題の条件と図2Bに示した状況を振り返る。図2Bに示すように、T1, T2,
R1, R2がENノード条件を満たし、また、T1がR1と送信すると仮定する。CSMAなどのような先行技術においては、T2がT1の稼動中のトラフィックを検知するので、T2はR2と直接通信することができない。しかしながら、実際に、T1からR1およびT2からR2の2つの送信リンクが、衝突することなく同時に発生するかもしれない。このように、EN問題は、無線チャネルの無駄な消費を引き起こす。
【0062】
本発明による電力制御基づいたMAC方法においては、たとえT2がT1の稼動中のトラフィックを検知しても、キャリア検知がもはや送信判定の印ではないので、T2はそれにもかかわらず目的とするPOD R2にRF+USデータを送信する。すなわち、T2がT1の稼動中のトラフィックを検知できるけれども、タグ装置が互いの間で検知するかどうかにかかわらず、T2からR2への通信リンクは、CRP−CAP交換および測位装置リストの内容に従って今までどおり成功裏に確立することができる。より正確には、図2Bの具体例に関しては、T2における送信判定については2つのケースがある。
1)R1のCAPがT2によって受信されなければ、T2は測位装置リストに従ってCRPの送信電力を選択し、チャネルを要求するためにCRPを送信する。CRPがR2によって受信されると、R2は、T2にチャネルを割り当てるためにCAPを応答する。それにより、T1→R1およびT2→R1のリンクを同時に確立することができる。
2)R1のCAPがT2によって受信されれば、T2はR1のBusy状態を認識している。EN条件によれば、|T2-R2|<|T2-R1|であるに違いない。本発明のMAC方法の電力順応によれば、T2は、チャネルを要求するCRPを送信するための送信電力を下げる。CRPがR2によって受信されると、R2は、T2にチャネルを割り当てるためにCAPを応答する。これにより、T1→R1およびT2→R1のリンクが同時に確立される。
【0063】
両方のケースについて、EN条件の下で、2つのリンクを同時に成功裏に確立することができることが分かるであろう。このように、本発明による電力制御基づいたMAC方法は、効果的にEN問題を解決することができる。
2.暫定的な隠れ端末(HN)問題の解決
【0064】
式(1)で説明した隠れ端末(HN)の条件および図2Aに示した状況を振り返る。図2Aに示すように、CSMAなどのような先行技術においては、T1とT2は互いのトラフィックを検知することができないので、それらは、POD Rに同時に送信し、Rで信号衝突を引き起こすことになる。
【0065】
しかしながら、本発明のMAC方法においては、T1がRにCRPを送信すれば、RはCAPを応答する。ただCAPの有効範囲の半径をT1とT2の両方の送信半径より大きく設定する必要がある。その後、T1とT2の両方がRからCAPを受信する。このように、T1がRに送信すると、T2はCAPによってRがBUSY状態であると通知される。これにより、T1→Rのリンクでの信号衝突を回避するため、T2はRにメッセージを送信しない。従って、本発明のMAC方法では、HN問題を解決するための条件は以下のようになる。
【数4】
ここで、DCAPは、CAPパケットの通信半径である。実際の適用においては、本発明のMACが暫定的なHN解放となり、その条件が容易に満たされるように、タグ装置の最大の伝送距離より大きくなるDCAPを選択する。
【0066】
従って、本発明においては、いかなる時も全ての受信機が1つのみの送信機と通信されることを保証することができる。それにより、RFおよびUS衝突は起こらない。さらに、タグ装置sが最も近くかつIDLE状態のPODを巧妙に選択することができ、送信電力を適切に調節して他のタグ装置との干渉を回避することができるので、異なるタグ装置とPOD間で同時の接続が可能となる。従って、先行技術と比較して、時空間再使用が大幅に改善される。
【0067】
上述した実施の形態において、幾つかの特定のステップを例として示しかつ説明している。しかしながら、本発明の方法の工程は、これらの特定のステップに限定されない。当業者であれば、これらのステップを変更し、修正し、補完することができること、そしていくつかのステップの順番を、本発明の精神および本質的な特徴から外れずに変更することができることを十分に理解するであろう。
【0068】
以上、特定の実施の形態を参照して本発明を説明したが、本発明は、図面中で示される上記の特定の実施の形態および特定の構成に限定されない。例えば、示されたいくつかの構成要素は、1つの構成要素としてお互いと組み合わせるかもしれない。あるいは、1つの構成要素はいくつかのサブコンポーネントに分割されるかもしれないし、他の既知の構成要素も加えられるかもしれない。動作処理も実施例において示されるものに限定されない。当業者は、本発明が、本発明の精神および本質的な機能から外れずに、他の特定の形態で実装可能であることを理解するであろう。従って、現在の実施の形態は、全ての点において例示でありかつ限定的でないとして考慮されるべきである。本発明の範囲は、前述の説明によってではなく添付された請求項によって示される。また、したがって、請求項と同等の意味と範囲の内で生ずる変更は全て本発明の範囲に包含される。
【符号の説明】
【0069】
310:送信機
311:ランダム遅延手段
312:トラフィック検知手段
313:送信判定手段
314:信号送信手段
320:受信機
322:信号受信手段
323:位置計算手段
500:マルチオブジェクト測位システム
510:タグ装置(送信機)
511:チャネル要求手段
512:送信判定手段
513:測位信号送信手段
514:測位装置リスト更新手段
515:送信電力調整手段
516:測位装置リスト
520:測位装置(POD)
521:状態応答手段
522:測位信号受信手段
523:位置計算手段
【特許請求の範囲】
【請求項1】
オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含むマルチオブジェクト測位システムのための電力制御基づく多重アクセスコントロール方法であって、
各タグ装置が測位装置の状態情報を記録する測位装置リストを記憶する記憶ユニットを含み、
前記タグ装置が、チャネル要求パケット(CRP)を間欠的に送信するステップと、
idle状態でかつ前記CRPを受信した測位装置が、有効範囲内に、前記測位装置によって受信した前記CRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に前記測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信するステップと、
前記CAPを受信したタグ装置が、前記CAPの内容に応じて記憶した前記測位装置リストを更新するステップと、
前記タグ装置が測位装置リストを参照してCRPの送信電力を調節するステップと
を含むことを特徴とする電力制御基づく多重アクセスコントロール方法。
【請求項2】
前記CRPが、前記タグ装置を識別するためのTagIDを含むことを特徴とする請求項1に記載の電力制御基づく多重アクセスコントロール方法。
【請求項3】
前記CAPが、前記タグ装置を識別するためのTagID、前記測位装置を識別するためのPODIDおよび前記測位装置の状態情報を含むことを特徴とする請求項1に記載の電力制御基づく多重アクセスコントロール方法。
【請求項4】
前記測位装置リストが、前記測位装置に対応する複数のエントリを含み、
前記エントリが、前記測位装置のPODIDと、前記測位装置と前記タグ装置間の距離と、前記測位装置の状態と、前記測位装置の利用不可の間隔からなることを特徴とする請求項1に記載の電力制御基づく多重アクセスコントロール方法。
【請求項5】
前記測位装置リストを更新するステップが、
前記測位装置リストにおいて、前記CAPに含まれる前記PODIDを検索するステップと、
前記測位装置リストに前記PODIDに対応するエントリが見つけられなければ、前記測位装置リストに前記測位装置に関するエントリを追加するステップと、
前記測位装置リストに前記PODIDに対応するエントリが見つかれば、対応するエントリの項目を更新するステップを含むことを特徴とする請求項3に記載の電力制御基づく多重アクセスコントロール方法。
【請求項6】
前記CAPの受信の後に、タグ装置が、前記CAPに含まれるTagIDを自身のIDと比較し、一致すれば、前記CAPを送信する前記測位装置に位置信号を送信するステップと、
前記測位装置が、前記位置信号を使用して前記タグ装置を取り付けたオブジェクトの位置を判定するステップを、さらに含むことを特徴とする請求項3に記載の電力制御基づく多重アクセスコントロール方法。
【請求項7】
前記位置信号が、US+RF信号であることを特徴とする請求項6に記載の電力制御基づく多重アクセスコントロール方法。
【請求項8】
前記測位装置が、前記位置信号の到達時間(TOA)結果に基づいて前記オブジェクトの位置を計算することを特徴とする請求項7に記載の電力制御基づく多重アクセスコントロール方法。
【請求項9】
前記CRPの送信電力を調節するステップが、
前記測位装置リストが空の場合、デフォルトの送信電力で前記CRPを送信するステップと、
前記測位装置リストが空でなく、かつリストされた最も近い測位装置がidele状態である場合、最も近い測位装置にCRPを送信するように送信電力を調節するステップと、
前記測位装置リストが空ではないが、リストされた最も近い測位装置がBusy状態である場合、より小さい送信電力でCRPを送信するよう送信電力を下げるステップを含むことを特徴とする請求項4に記載の電力制御基づく多重アクセスコントロール方法。
【請求項10】
より小さい送信電力で前記CRPを送信した後に、前記タグ装置がより近い測位装置を見つけ出さなければ、前記タグ装置は送信電力をそれ以上下げずに、測位装置リストにリストされた最も近い測位装置がBusy状態からIdle状態に切り替わるのを待ち、次に、最も近い測位装置に前記CRPを送信するように送信電力を調節することを特徴とする請求項9に記載の電力制御基づく多重アクセスコントロール方法。
【請求項11】
電力制御に基づく多重アクセスコントロールを実行可能なマルチオブジェクト測位システムであって、
オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含み、
前記タグ装置は、
前記測位装置の状態情報を記録する測位装置リストを記憶する記憶手段と、
チャネル要求パケット(CRP)を間欠的に送信するチャネル要求手段と、
前記測位装置から受信したチャネル割当てパケット(CAP)の内容に基づいて前記測位装置リストを更新する測位装置リスト更新手段と、
前記測位装置リストを参照して前記CRPの送信電力を調節する送信電力調整手段とを備え、
前記測位装置は、
前記タグ装置からの前記CRPを受信し、Idle状態の場合に、有効範囲内に、前記測位装置によって受信した前記CRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に前記測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信する状態応答手段を備えることを特徴とするマルチオブジェクト測位システム。
【請求項12】
前記CRPが、前記タグ装置を識別するためのTagIDを含むことを特徴とする請求項11に記載のマルチオブジェクト測位システム。
【請求項13】
前記CAPが、前記タグ装置を識別するためのTagID、前記測位装置を識別するためのPODIDおよび前記測位装置の状態情報を含むことを特徴とする請求項11に記載のマルチオブジェクト測位システム。
【請求項14】
前記測位装置リストが、前記測位装置に対応する複数のエントリを含み、
前記エントリが、前記測位装置のPODIDと、前記測位装置と前記タグ装置間の距離と、前記測位装置の状態と、前記測位装置の利用不可の間隔からなることを特徴とする請求項11に記載のマルチオブジェクト測位システム。
【請求項15】
前記測位装置リスト更新手段が、
前記測位装置リストにおいて、前記CAPに含まれる前記PODIDを検索する検索ユニットと、
前記測位装置リストに前記PODIDに対応するエントリが見つけられなければ、前記測位装置リストに前記測位装置に関するエントリを追加する追加ユニットと、
前記測位装置リストに前記PODIDに対応するエントリが見つかれば、対応するエントリの項目を更新する更新ユニットを含むことを特徴とする請求項13に記載のマルチオブジェクト測位システム。
【請求項16】
前記タグ装置が、
前記CAPの受信の後に、タグ装置が、前記CAPに含まれるTagIDを自身のIDと比較し、位置信号を送信するかどうかを判定する送信判定手段と、
前記一致すれば、前記CAPを送信する前記測位装置に位置信号を送信するステップと、
前記CAPに含まれるTagIDが自身のIDと一致すると前記送信判定手段が判定すると、前記測位装置に位置信号を送信する位置信号送信手段とを備え、
前記測位装置が、
前記タグ装置からの位置信号を受信する測位信号受信手段と、
前記位置信号を使用して前記タグ装置を取り付けたオブジェクトの位置を計算する位置計算手段とを備えることを特徴とする請求項13に記載のマルチオブジェクト測位システム。
【請求項17】
前記位置信号が、US+RF信号であることを特徴とする請求項11に記載のマルチオブジェクト測位システム。
【請求項18】
前記測位装置は、前記位置信号の到達時間(TOA)結果、到達時間差(TDOA)結果あるいは到達角(AOA)結果に基づいて前記オブジェクトの位置を計算することを特徴とする請求項17に記載のマルチオブジェクト測位システム。
【請求項1】
オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含むマルチオブジェクト測位システムのための電力制御基づく多重アクセスコントロール方法であって、
各タグ装置が測位装置の状態情報を記録する測位装置リストを記憶する記憶ユニットを含み、
前記タグ装置が、チャネル要求パケット(CRP)を間欠的に送信するステップと、
idle状態でかつ前記CRPを受信した測位装置が、有効範囲内に、前記測位装置によって受信した前記CRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に前記測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信するステップと、
前記CAPを受信したタグ装置が、前記CAPの内容に応じて記憶した前記測位装置リストを更新するステップと、
前記タグ装置が測位装置リストを参照してCRPの送信電力を調節するステップと
を含むことを特徴とする電力制御基づく多重アクセスコントロール方法。
【請求項2】
前記CRPが、前記タグ装置を識別するためのTagIDを含むことを特徴とする請求項1に記載の電力制御基づく多重アクセスコントロール方法。
【請求項3】
前記CAPが、前記タグ装置を識別するためのTagID、前記測位装置を識別するためのPODIDおよび前記測位装置の状態情報を含むことを特徴とする請求項1に記載の電力制御基づく多重アクセスコントロール方法。
【請求項4】
前記測位装置リストが、前記測位装置に対応する複数のエントリを含み、
前記エントリが、前記測位装置のPODIDと、前記測位装置と前記タグ装置間の距離と、前記測位装置の状態と、前記測位装置の利用不可の間隔からなることを特徴とする請求項1に記載の電力制御基づく多重アクセスコントロール方法。
【請求項5】
前記測位装置リストを更新するステップが、
前記測位装置リストにおいて、前記CAPに含まれる前記PODIDを検索するステップと、
前記測位装置リストに前記PODIDに対応するエントリが見つけられなければ、前記測位装置リストに前記測位装置に関するエントリを追加するステップと、
前記測位装置リストに前記PODIDに対応するエントリが見つかれば、対応するエントリの項目を更新するステップを含むことを特徴とする請求項3に記載の電力制御基づく多重アクセスコントロール方法。
【請求項6】
前記CAPの受信の後に、タグ装置が、前記CAPに含まれるTagIDを自身のIDと比較し、一致すれば、前記CAPを送信する前記測位装置に位置信号を送信するステップと、
前記測位装置が、前記位置信号を使用して前記タグ装置を取り付けたオブジェクトの位置を判定するステップを、さらに含むことを特徴とする請求項3に記載の電力制御基づく多重アクセスコントロール方法。
【請求項7】
前記位置信号が、US+RF信号であることを特徴とする請求項6に記載の電力制御基づく多重アクセスコントロール方法。
【請求項8】
前記測位装置が、前記位置信号の到達時間(TOA)結果に基づいて前記オブジェクトの位置を計算することを特徴とする請求項7に記載の電力制御基づく多重アクセスコントロール方法。
【請求項9】
前記CRPの送信電力を調節するステップが、
前記測位装置リストが空の場合、デフォルトの送信電力で前記CRPを送信するステップと、
前記測位装置リストが空でなく、かつリストされた最も近い測位装置がidele状態である場合、最も近い測位装置にCRPを送信するように送信電力を調節するステップと、
前記測位装置リストが空ではないが、リストされた最も近い測位装置がBusy状態である場合、より小さい送信電力でCRPを送信するよう送信電力を下げるステップを含むことを特徴とする請求項4に記載の電力制御基づく多重アクセスコントロール方法。
【請求項10】
より小さい送信電力で前記CRPを送信した後に、前記タグ装置がより近い測位装置を見つけ出さなければ、前記タグ装置は送信電力をそれ以上下げずに、測位装置リストにリストされた最も近い測位装置がBusy状態からIdle状態に切り替わるのを待ち、次に、最も近い測位装置に前記CRPを送信するように送信電力を調節することを特徴とする請求項9に記載の電力制御基づく多重アクセスコントロール方法。
【請求項11】
電力制御に基づく多重アクセスコントロールを実行可能なマルチオブジェクト測位システムであって、
オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含み、
前記タグ装置は、
前記測位装置の状態情報を記録する測位装置リストを記憶する記憶手段と、
チャネル要求パケット(CRP)を間欠的に送信するチャネル要求手段と、
前記測位装置から受信したチャネル割当てパケット(CAP)の内容に基づいて前記測位装置リストを更新する測位装置リスト更新手段と、
前記測位装置リストを参照して前記CRPの送信電力を調節する送信電力調整手段とを備え、
前記測位装置は、
前記タグ装置からの前記CRPを受信し、Idle状態の場合に、有効範囲内に、前記測位装置によって受信した前記CRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に前記測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信する状態応答手段を備えることを特徴とするマルチオブジェクト測位システム。
【請求項12】
前記CRPが、前記タグ装置を識別するためのTagIDを含むことを特徴とする請求項11に記載のマルチオブジェクト測位システム。
【請求項13】
前記CAPが、前記タグ装置を識別するためのTagID、前記測位装置を識別するためのPODIDおよび前記測位装置の状態情報を含むことを特徴とする請求項11に記載のマルチオブジェクト測位システム。
【請求項14】
前記測位装置リストが、前記測位装置に対応する複数のエントリを含み、
前記エントリが、前記測位装置のPODIDと、前記測位装置と前記タグ装置間の距離と、前記測位装置の状態と、前記測位装置の利用不可の間隔からなることを特徴とする請求項11に記載のマルチオブジェクト測位システム。
【請求項15】
前記測位装置リスト更新手段が、
前記測位装置リストにおいて、前記CAPに含まれる前記PODIDを検索する検索ユニットと、
前記測位装置リストに前記PODIDに対応するエントリが見つけられなければ、前記測位装置リストに前記測位装置に関するエントリを追加する追加ユニットと、
前記測位装置リストに前記PODIDに対応するエントリが見つかれば、対応するエントリの項目を更新する更新ユニットを含むことを特徴とする請求項13に記載のマルチオブジェクト測位システム。
【請求項16】
前記タグ装置が、
前記CAPの受信の後に、タグ装置が、前記CAPに含まれるTagIDを自身のIDと比較し、位置信号を送信するかどうかを判定する送信判定手段と、
前記一致すれば、前記CAPを送信する前記測位装置に位置信号を送信するステップと、
前記CAPに含まれるTagIDが自身のIDと一致すると前記送信判定手段が判定すると、前記測位装置に位置信号を送信する位置信号送信手段とを備え、
前記測位装置が、
前記タグ装置からの位置信号を受信する測位信号受信手段と、
前記位置信号を使用して前記タグ装置を取り付けたオブジェクトの位置を計算する位置計算手段とを備えることを特徴とする請求項13に記載のマルチオブジェクト測位システム。
【請求項17】
前記位置信号が、US+RF信号であることを特徴とする請求項11に記載のマルチオブジェクト測位システム。
【請求項18】
前記測位装置は、前記位置信号の到達時間(TOA)結果、到達時間差(TDOA)結果あるいは到達角(AOA)結果に基づいて前記オブジェクトの位置を計算することを特徴とする請求項17に記載のマルチオブジェクト測位システム。
【図1】

【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】

【図10B】
【図2A】
【図2B】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【公開番号】特開2010−175535(P2010−175535A)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−237195(P2009−237195)
【出願日】平成21年10月14日(2009.10.14)
【出願人】(505418870)エヌイーシー(チャイナ)カンパニー, リミテッド (108)
【氏名又は名称原語表記】NEC(China)Co.,Ltd.
【Fターム(参考)】
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2009−237195(P2009−237195)
【出願日】平成21年10月14日(2009.10.14)
【出願人】(505418870)エヌイーシー(チャイナ)カンパニー, リミテッド (108)
【氏名又は名称原語表記】NEC(China)Co.,Ltd.
【Fターム(参考)】
[ Back to top ]