
マルチスタティックレーダ装置

【課題】パルス間コヒーレント積分を行い、処理量を少なくすることができ、目標検出性能を改善することができるマルチスタティックレーダ装置を得る。
【解決手段】第1の受信ビデオ信号から目標とレーダとの相対速度を算出し、各時刻の相対速度から目標との初期相対速度、相対加速度を算出し、相関演算することにより生成された信号の目標までの距離が同一になるような速度補償量を目標とレーダとの初期相対速度、相対加速度を用いて算出し、速度補償量を用いて第2の受信ビデオ信号の位相を補償し、速度補償された第2の受信ビデオ信号を相関演算する。
【解決手段】第1の受信ビデオ信号から目標とレーダとの相対速度を算出し、各時刻の相対速度から目標との初期相対速度、相対加速度を算出し、相関演算することにより生成された信号の目標までの距離が同一になるような速度補償量を目標とレーダとの初期相対速度、相対加速度を用いて算出し、速度補償量を用いて第2の受信ビデオ信号の位相を補償し、速度補償された第2の受信ビデオ信号を相関演算する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、目標検出性能を改善したマルチスタティックレーダ装置に関するものである。
【背景技術】
【0002】
従来のマルチスタティックレーダ装置について図26及び図27を参照しながら説明する(例えば、非特許文献1参照)。図26は、従来のマルチスタティックレーダ装置の送信局、目標及び受信局の配置を示す図である。また、図27は、従来のマルチスタティックレーダ装置の信号処理系統を示す図である。ここでは、非特許文献1で示された長時間積分の方法について説明する。
【0003】
図26に示すように、3つの送信局S1、S2、S3、1つの受信局Oにより目標Tの位置を算出する。送信波は符号変調されており、正確あるいは真値に近いドップラー周波数を用いて、図27に示すように、反射波受信信号に対しドップラー変位の位相補正を行わなければ、コヒーレント積分の効率が劣化する。非特許文献1では、ドップラー周波数を算出することができないため、複数のドップラー周波数を用いて補正し、相関演算、コヒーレント積分を行っている。その結果、最も積分効率が良かった結果を抽出することによって、長時間積分による積分効率の向上を図る。
【0004】
このマルチスタティックレーダ装置では、コヒーレント積分を利用するため、ノンコヒーレント積分に代表される振幅情報のみを用いる積分方式に比べ、信号対雑音電力比SNR(Signal to Noise Ratio)の改善により、目標検出性能の改善が期待できる。
【0005】
【非特許文献1】三島 哲生、松田 庄司、岡村 敦、‘符号化された電波を利用するマルチスタティック・レーダのフィールド実験’、電子情報通信学会技術研究報告、Vol.92、No.81(SANE92 6−11)、Page1−8(1992,05,29)
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、上述したような従来のマルチスタティックレーダ装置では、パルス間コヒーレント積分を行うために、目標の速度が未知なため、複数のドップラー補正量を用いて位相補正を行う必要があり、処理量が増大するという問題点があった。
【0007】
この発明は、上述のような課題を解決するためになされたもので、その目的は、パルス間コヒーレント積分を行い、処理量を少なくすることができ、目標検出性能を改善することができるマルチスタティックレーダ装置を得るものである。
【課題を解決するための手段】
【0008】
この発明に係るマルチスタティックレーダ装置は、第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、前記第1の受信信号からドップラー周波数を算出する第1の信号処理器とを有する第1のレーダと、前記第1のレーダと2次元ジオメトリーで分離配置され、目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、第2のキャリア信号をパルス変調した第2の送信信号を放射する第2の送信手段と、目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、前記第1の受信信号からドップラー周波数を算出し、算出されたドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出し、前記相対速度を用いて、前記第3の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行い、前記速度補償された第2の受信信号を相関演算し、前記相関演算された第2の受信信号を積分し、積分することにより生成された信号の強度に基づき目標との相対距離を算出する第2の信号処理器を有する第2のレーダとを設けたものである。
【発明の効果】
【0009】
この発明に係るマルチスタティックレーダ装置は、第1の受信信号を利用し、各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、その速度補償量を用いて第2の受信信号に対し速度補償を行うので、複数のドップラー補正量を用いる必要がなくなり、処理量を少なくすることができ、移動目標に対する目標検出性能を改善することができるという効果を奏する。
【発明を実施するための最良の形態】
【0010】
実施の形態1.
この発明の実施の形態1に係るマルチスタティックレーダ装置について図1から図5までを参照しながら説明する。図1は、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1の構成を示す図である。なお、以降では、各図中、同一符号は同一又は相当部分を示す。
【0011】
図1において、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0012】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0013】
また、信号処理器7Aは、ドップラー周波数算出手段101が設けられている。
【0014】
図2は、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0015】
図2において、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Bと、表示器8とが設けられている。
【0016】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0017】
また、信号処理器7Bは、ドップラー周波数算出手段101と、相対速度算出手段102と、初期相対速度・相対加速度算出手段103と、速度補償手段201と、相関手段202と、積分手段203と、測距手段204とが設けられている。
【0018】
なお、信号処理器7A、7Bは、CPU、RAM、ROM、インターフェース回路を有するコンピュータから構成され、ROMに記憶されるプログラムに従ってCPUで演算処理が行われる。また、信号処理器7A、7Bは、ネットワークを介して処理結果等の情報が共有されている。
【0019】
図3は、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【0020】
図3に示すように、レーダ♯1とレーダ♯2は2次元ジオメトリーで分離配置されている。なお、レーダ♯2は、図2に示すように、空中線1Bと空中線1Cを有しているが、図3では1つの空中線で代表して示している。
【0021】
つぎに、この実施の形態1に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0022】
まず、レーダ♯1が第1の受信ビデオ信号を生成するまでの動作について説明する。送信機2は、第1のキャリア信号を目標との相対速度がアンビギュイティなく計測可能なパルス繰り返し周期PRI(Pulse Repetition Interval)でパルス変調して第1の送信RF信号を生成し、送受切替器3Aに出力する。この送受切替器3Aは、送信機2から入力された第1の送信RF信号を空中線1Aに出力する。そして、空中線1Aから第1の送信RF信号が空中に放射される。
【0023】
空中に放射された第1の送信RF信号は、目標で反射され、第1の反射RF信号として空中線1Aに入射する。そこで、空中線1Aは、入射してきた第1の反射RF信号を受信し、第1の受信RF信号として送受切替器3Aに出力する。送受切替器3Aは、空中線1Aから入力された第1の受信RF信号を受信機4Aに出力する。受信機4Aは、送受切替器3Aから入力された第1の受信RF信号を増幅、位相検波の後、第1の受信ビデオ信号に変換し、信号処理器7Aに出力する。
【0024】
次に、レーダ♯2が第1の受信ビデオ信号を生成するまでの動作について説明する。レーダ♯1により空中に放射された第1の送信RF信号は、目標で反射され、第1の反射RF信号としてレーダ♯2の空中線1Bに入射する。そこで、空中線1Bは、入射してきた第1の反射RF信号を受信し、第1の受信RF信号として受信機4Bに出力する。受信機4Aは、空中線1Bから入力された第1の受信RF信号を増幅、位相検波の後、第1の受信ビデオ信号に変換し、信号処理器7Bに出力する。
【0025】
また、レーダ♯2が第2の受信ビデオ信号を生成するまでの動作について説明する。送信機5は、キャリア信号を目標との相対距離がアンビギュイティなく計測可能な周波数になるようなパルス繰り返し周期でパルス変調し、さらにパルス内をアップチャープ変調あるいはダウンチャープ変調することを繰り返して第2の送信RF信号を生成し、送受切替器3Bに出力する。送受切替器3Bは、送信機5から入力された第2の送信RF信号を空中線1Cに出力する。そして、空中線1Cから第2の送信RF信号が空中に放射される。
【0026】
空中に放射された第2の送信RF信号は、目標で反射され、第2の反射RF信号として空中線1Cに入射する。そこで、空中線1Cは、入射してきた第2の反射RF信号を受信し、第2の受信RF信号として送受切替器3Bに出力する。送受切替器3Bは、空中線1Cから入力された第2の受信RF信号を受信機6Aに出力する。受信機6Aは、送受切替器3Bから入力された第2の受信RF信号を増幅、位相検波の後、第2の受信ビデオ信号に変換し、信号処理器7Bに出力する。
【0027】
ここで、以下の説明において、目標との相対速度がアンビギュイティなく計測可能な時間間隔になるようなパルス繰り返し周期PRIをTpri,H、目標との相対距離がアンビギュイティなく計測可能な時間間隔になるようなパルス繰り返し周期をTpri,Lと略記する。
【0028】
次に、レーダ♯1の信号処理器7Aとレーダ♯2の信号処理器7Bの処理動作について図4及び図5を参照して説明する。図4は、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1とレーダ♯2の信号処理器の処理動作を示す図である。また、図5は、この発明の実施の形態1に係るマルチスタティックレーダ装置のチャープパルス圧縮の処理動作を示す図である。
【0029】
ドップラー周波数算出手段101に入力される第1の受信ビデオ信号VH(i,ncpi,H,mH)は、次の式(1)で表される。
【0030】
【数1】

【0031】
ここで、A’H(i)は第1の受信ビデオ信号の振幅、f0,Hは第1の送信RF信号の送信中心周波数、RT,H(ncpi,H)は目標と第1の送信RF信号を送信するレーダとの相対距離、RR,H(i,ncpi,H)は目標と第1の反射RF信号を受信するレーダとの相対距離、v0T(Hno)は目標と第1の送信RF信号を送信するレーダとの初期相対速度、aT(Hno)は目標と第1の送信RF信号を送信するレーダとの相対加速度、v0R(i)は目標と第1の反射RF信号を受信するレーダとの初期相対速度、aR(i)は目標と第1の反射RF信号を受信するレーダとの相対加速度、Tcpi,HはCPI(Coherent Pulse Interval)、iはレーダ番号、Hnoは第1の送信RF信号を送信するレーダ番号(Hno=1として説明している)、ncpiはCPI番号、NcpiはCPI数、mHは1CPI内のサンプリング番号、MHは1CPIのA/Dサンプリング点数、Rdr_numはレーダ数を表す。
【0032】
目標と第1の送信RF信号を送信するレーダとの相対距離RT,H(nH)は、次の式(2)により表される。ここで、R0T(Hno)は目標と第1の送信RF信号を送信するレーダとの初期相対距離を表す。
【0033】
【数2】
【0034】
目標と第1の反射RF信号を受信するレーダとの相対距離RR,H(i,ncpi,H)は、次の式(3)により表される。ここで、R0R(i)は目標と第1の反射RF信号を受信するレーダとの初期相対距離を表す。
【0035】
【数3】
【0036】
ドップラー周波数算出手段101は、入力された第1の受信ビデオ信号VH(i,ncpi,H,mH)を、次の式(4)に従い高速フーリエ変換FFT(Fast Fourier Transform)を行い、時間領域の第1の受信ビデオ信号を周波数領域の第1の受信ビデオ信号FVH(i,ncpi,H,kf)に変換する。
【0037】
【数4】
【0038】
ここで、lHはサンプリング番号、LHは第1の受信ビデオ信号に対するFFT点数、kfは周波数領域の第1の受信ビデオ信号の周波数ビン番号を表す。
【0039】
ドップラー周波数算出手段101は、周波数領域の第1の受信ビデオ信号FVH(i,ncpi,H,kf)の最大振幅を示すドップラー周波数fd(i,ncpi,H)を次の式(5)に従って算出する。
【0040】
【数5】
【0041】
ここで、max_F(FX)は、周波数領域の信号FXの最大振幅を示すドップラー周波数を表す。
【0042】
相対速度算出手段102に入力されたドップラー周波数fd(i,ncpi,H)は、目標と第1の送信RF信号を送信するレーダとの相対速度vT(Hno,ncpi,H)と目標と第1の反射RF信号を受信するレーダの相対速度vR(i,ncpi,H)から、次の式(6)により表される。
【0043】
【数6】
【0044】
ただし、第1の送信RF信号を送信し、第1の反射RF信号を受信するレーダ♯1は、vT(Hno,ncpi,H)=vR(i,ncpi,H)の関係になり、次の式(7)により表される。
【0045】
【数7】
【0046】
相対速度算出手段102は、目標と第1の送信RF信号を送信し、第1の反射RF信号を受信するレーダとの相対速度v’R(i,ncpi,H)を次の式(8)により算出する。
【0047】
【数8】
【0048】
また、相対速度算出手段102は、目標と第1の反射RF信号を受信するレーダの相対速度との相対速度v’R(i,ncpi,H)を次の式(9)により算出する。
【0049】
【数9】
【0050】
ここで、真値と区別し、式(8)、式(9)により算出された目標とレーダとの相対速度であることを表すために’を付している。以降、v’R(i,ncpi,H)を目標との相対速度と記述する。
【0051】
初期相対速度・相対加速度算出手段103に入力された各CPIで算出された目標との相対速度v’R(i,ncpi,H)と、目標との初期相対速度v0R(i)、目標との相対加速度aR(i)は、次の式(10)により表される。また、式(10)は、式(11)により表される。ただし、AH、XH(i)、BH(i)は式(12)により表される。
【0052】
【数10】
【0053】
初期相対速度・相対加速度算出手段103は、式(11)を次の式(13)に従い解き、目標との初期相対速度v0R(i)、目標との相対加速度aR(i)を算出する。
【0054】
【数11】
【0055】
ここで、ZTは行列Zの転置、Z−1は行列Zの逆行列を表す。また、真値と区別し、式(13)により算出された目標との初期相対速度、相対加速度であることを表すために’を付している。
【0056】
速度補償手段201に入力される第2の受信ビデオ信号VL(i,nL,mL)は、次の式(14)で表される。
【0057】
【数12】
【0058】
ここで、f0,Lは第2の送信RF信号の送信中心周波数、Tpri,Lは第2の送信RF信号のパルス繰り返し周期、B0,Lは第2の送信RF信号の送信帯域幅、T0,Lは第2の送信RF信号の送信パルス幅、φ0,Lは第2の送信RF信号の初期位相、A’L(i)は第2の受信ビデオ信号の振幅、RT,L(nL)は目標と第2の送信RF信号を送信するレーダとの相対距離、RR,L(i,nL)は目標と第2の反射信号を受信するレーダとの相対距離、v0T(Lno)は目標と第2の送信RF信号を送信するレーダとの初期相対速度、aT(Lno)は目標と第2の送信RF信号を送信するレーダとの相対加速度、v0R(i)は目標と第2の反射RF信号を受信するレーダとの初期相対速度、aR(i)は目標と第2の反射信号を受信するレーダとの相対加速度、Lnoは第2の送信RF信号を送信するレーダ番号(Lno=2として説明している)、nLは第2の送信RF信号のパルス番号、NLは第2の送信RF信号のパルス数、ΔtLは第2の受信ビデオ信号に対するA/Dサンプリング周期、mLは第2の受信ビデオ信号に対するA/Dサンプリング番号、MLは1PRIのA/Dサンプリング点数を表す。また、chirpは第2の送信RF信号がアップチャープ変調のとき1が代入され、ダウンチャープ変調のとき−1が代入される。
【0059】
目標と第2の送信RF信号を送信するレーダとの相対距離RT,L(nL)は、次の式(15)により表される。ここで、R0T(Lno)は目標と第2の送信RF信号を送信するレーダとの初期相対距離を表す。
【0060】
【数13】
【0061】
目標と第2の反射信号を受信するレーダとの相対距離RR,L(i,nL)は、次の式(16)により表される。ここで、R0R(i)は目標と第2の反射信号を受信するレーダとの初期相対距離を表す。
【0062】
【数14】
【0063】
速度補償手段201は、初期相対速度・相対加速度算出手段103から入力される目標との初期相対速度v’0R(i)、相対加速度a’R(i)を用いて、チャープパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるような速度補償量vcor,L(i,nL,mL)を、式(17)に従い算出する。ただし、目標とレーダとの初期相対速度の和v0TR(i)は式(18)、目標とレーダとの相対加速度の和aTR(i)は式(19)により表される。
【0064】
【数15】
【0065】
そして、速度補償手段201は、速度補償量vcor,L(i,nL,mL)を用いて第2の受信ビデオ信号VL(i,nL,mL)の速度補償を次の式(20)に従って行い、速度補償後の第2の受信ビデオ信号V’L(i,nL,mL)を出力する。
【0066】
【数16】
【0067】
相関手段202は、速度補償後の第2の受信ビデオ信号V’L(i,nL,mL)と参照信号の相関演算を行い、チャープパルス圧縮を行う。相関手段202で用いる第2の送信RF信号の変調成分と複素共役の関係にある参照信号Ex(mτ)は、次の式(21)で表される。ここで、A’は参照信号の振幅、mτは参照信号のサンプリング番号を表す。また、参照信号のサンプリング点数Mτは、次の式(22)により表される。ここで、Samp_fは第2の受信ビデオ信号に対するサンプリング周波数を表す。
【0068】
【数17】
【0069】
相関手段202は、速度補償後の第2の受信ビデオ信号V’L(i,nL,mL)と参照信号Ex(mτ)を、次の式(23)、式(24)により、それぞれFFTした後、式(25)に従い、乗算する。ここで、lはレンジビン番号、L’はレンジ方向FFT点数を表す。ただし、L’>MLの時にはV’L(i,nL,mL)に0を代入し、L’>Mτの時にはEx(mτ)に0を代入する。
【0070】
【数18】
【0071】
また、相関演算後の信号を第2の受信ビデオ信号に対するA/Dサンプリング間隔よりも高精度にサンプリングする場合は、相関手段202は次の式(26)により0を設定する。ここで、Lはレンジ方向高速フーリエ逆変換IFFT(Inverse Fast Fourier Transform)点数であり、次の式(27)により表される。ただし、qは0以上の整数である。また、q=0の場合は、A/Dサンプリング間隔と同じサンプリング間隔になる。
【0072】
【数19】
【0073】
最後に、相関手段202は、乗算結果を、次の式(28)により高速フーリエ逆変換IFFTを行い、相関演算の結果、すなわちチャープパルス圧縮後の信号RV・Ex(i,nL,l)を出力する。
【0074】
【数20】
【0075】
このような処理を行うことによって、図5に示すように、第2の受信ビデオ信号に対し速度補償を行った後、チャープパルス圧縮により生成された信号の振幅が最大を示す目標までの距離が同一になり、かつ、パルス間でコヒーレントになり、パルス間コヒーレント積分が可能になる。
【0076】
積分手段203は、パルス間での積分を行うものであり、相関手段202の出力であるチャープパルス圧縮後の信号RV・Ex(i,nL,l)を入力とし、例えば、高速フーリエ変換処理等を行い、レンジビン毎の信号成分、即ち、周波数スペクトルRf(i,kh,l)を次の式(29)に従って求めることにより、各周波数ビンの積分を行う。ここで、khは周波数ビン番号、Hはパルス方向FFT点数を表す。ただし、H>NLの時にはRV・Ex(i,nL,l)に0埋めを行う。
【0077】
【数21】
【0078】
測距手段204は、積分手段203から入力される周波数スペクトルRf(i,kh,l)を用いて目標との相対距離Rpeak(i)を次の式(30)に従って算出する。ここで、max_R(FS)は、周波数スペクトルFSの最大振幅を示す距離を表す。
【0079】
【数22】
【0080】
表示器8は、信号処理器7Bから入力される処理結果を表示する。
【0081】
このように、実施の形態1によれば、第1の受信ビデオ信号を利用し、第2の受信ビデオ信号がコヒーレントになる速度補償量を算出し、その速度補償量を用いて第2の受信ビデオ信号に対し速度補償を行うので、複数のドップラー補正量を用いる必要がなくなり、処理量が少なく、移動目標に対する目標検出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0082】
また、速度補償後の第2の受信ビデオ信号に対し、相関演算することにより、移動目標に対する目標検出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0083】
また、実施の形態1の相関手段202は、速度補償手段201と積分手段203の間に配置されているが、積分手段203と測距手段204の間に配置した場合でも同様の効果を得ることが可能になる。
【0084】
また、第1の送信RF信号は第2の送信RF信号よりDuty(=送信パルス幅/パルス繰り返し周期)が高いことや、第1の送信RF信号を送信するレーダを第2の送信RF信号を送信するレーダより目標に近い距離に分離配置することにより、第2の送信RF信号を送信するレーダの最大探知距離を延伸することが可能になる。
【0085】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0086】
さらに、3次元ジオメトリーにおいても同様の効果を得ることが可能になる。
【0087】
実施の形態2.
この発明の実施の形態2に係るマルチスタティックレーダ装置について図6から図8までを参照しながら説明する。この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0088】
すなわち、この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0089】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0090】
図6は、この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0091】
図6において、この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Cと、表示器8とが設けられている。
【0092】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0093】
また、レーダ♯1とレーダ♯2は、上記の実施の形態1の図3と同様に、2次元ジオメトリーで分離配置されている。
【0094】
この発明の実施の形態2に係るマルチスタティックレーダ装置は、上記の実施の形態1に係るマルチスタティックレーダ装置と比較して、上述したように、レーダ♯2の信号処理器7Cが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、この実施の形態2の信号処理器7Cは、図6に示すように、上記の実施の形態1の信号処理器7Bの速度補償手段201の代わりに、レンジ補正手段205と、加速度補償手段206とを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0095】
つぎに、この実施の形態2に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0096】
この実施の形態2の信号処理器7Cの処理動作について図7及び図8を参照して説明する。図7は、この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯1とレーダ♯2の信号処理器の処理動作を示す図である。また、図8は、この発明の実施の形態2に係るマルチスタティックレーダ装置のレンジ補正の処理動作を示す図である。
【0097】
相関手段202は、速度補償後の第2の受信ビデオ信号V’L(i,nL,mL)に代えて、第2の受信ビデオ信号VL(i,nL,mL)を入力として、参照信号Ex(mτ)との相関演算を式(23)から式(28)までに従って行い、相関演算の結果、すなわちチャープパルス圧縮後の信号RV・Ex(i,nL,l)を出力する。
【0098】
周知のように移動目標からの反射ビデオ信号に対してチャープパルス圧縮を行った場合、目標との相対速度にほぼ比例した距離だけシフトして測距され、各パルスのチャープパルス圧縮後の信号の最大振幅を示すまでの距離RPC,peak(i,nL)は、次の式(31)により表される。この式(31)において、vTR(i,nL)は式(32)で表される各パルスの目標と第2の送信RF信号を送信するレーダとの相対速度と、目標と第2の反射RF信号を受信するレーダとの相対速度の和、RTR(i,nL)は式(33)で表される各パルスの目標と第2の送信RF信号を送信するレーダとの相対距離と、目標と第2の反射RF信号を受信するレーダとの相対距離の和、ΔTは式(34)で表される定数である。
【0099】
【数23】
【0100】
レンジ補正手段205は、初期相対速度・相対加速度算出手段103の出力である目標とレーダとの初期相対速度の和v0TR(i)、相対加速度の和aTR(i)を用いて、次の式(35)に従って、レンジ補正量Rcor(i,nL)を算出する。
【0101】
【数24】
【0102】
また、レンジ補正手段205は、次の式(36)に従い、レンジ補正量Rcor(i,nL)をレンジビン単位で表すレンジ補正量Rcor_bin(i,nL)に変換する。
【0103】
【数25】
【0104】
ここで、Δrはチャープパルス圧縮後のサンプリング間隔、floor(Y)は、変数Yを越えない最大の整数を示す。
【0105】
そして、レンジ補正手段205は、算出されたレンジ補正量Rcor(i,nL)を用いて、次の式(37)に従って、チャープパルス圧縮することにより生成された信号RV・Ex(i,nL,l)のレンジ補正を行い、レンジ補正された信号RV・Ex_cor(i,nL,l)を出力する。このような処理を行うことによって、図8に示すように、チャープパルス圧縮により生成され、レンジ補正された信号の振幅が最大を示す目標までの距離を同一にすることができる。
【0106】
【数26】
【0107】
移動目標がパルス間で加速度を有している場合、パルス間でコヒーレントにならないため、目標検出性能が劣化する可能性がある。そのため、加速度補償手段206は、レンジ補正された信号に対して、加速度補償を行い、加速度を有する移動目標に対する目標検出性能の向上を図る。
【0108】
加速度補償手段206は、初期相対速度・相対加速度算出手段103の出力である目標とレーダとの初期相対速度v’0R(i)、相対加速度a’R(i)から求められた目標とレーダとの相対加速度の和aTR(i)を用いて、次の式(38)に従い、レンジ補正手段205の出力であるレンジ補正された信号RV・Ex_cor(i,nL,l)に対して加速度補償を行い、加速度補償された信号R’V・Ex_cor(i,nL,l)を出力する。
【0109】
【数27】
【0110】
このように、実施の形態2によれば、第2の受信信号に対しチャープパルス圧縮した後、レンジ補正、加速度補償をすることにより、目標との相対距離を考慮せず補償することができ、遠距離移動目標に対する目標検出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0111】
また、実施の形態2の相関手段202は、受信機6Aとレンジ補正手段205の間に配置されていたが、レンジ補正手段205と加速度補償手段206の間に配置した場合でも同様の効果を得ることができる。
【0112】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0113】
さらに、3次元ジオメトリーにおいても同様の効果を得ることが可能になる。
【0114】
実施の形態3.
この発明の実施の形態3に係るマルチスタティックレーダ装置について図9から図15までを参照しながら説明する。この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0115】
すなわち、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0116】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0117】
図9は、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0118】
図9において、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Dと、表示器8とが設けられている。
【0119】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0120】
図10は、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成を示す図である。
【0121】
図10において、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯3及び♯4は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Eとが設けられている。
【0122】
なお、第4の受信手段は、レーダ♯3の空中線1Dと、受信機4Cとから構成される。また、第5の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。第6の受信手段は、レーダ♯4の空中線1Dと、受信機4Cとから構成される。また、第7の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。
【0123】
図11は、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【0124】
図11に示すように、4つのレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4は、2次元ジオメトリーで分離配置されている。なお、各レーダは、複数の空中線を有しているものもあるが、図11では1つの空中線で代表して示している。
【0125】
この発明の実施の形態3に係るマルチスタティックレーダ装置は、上記の実施の形態1に係るマルチスタティックレーダ装置と比較して、レーダ♯2の信号処理器7D、レーダ♯3、レーダ♯4が異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態3の信号処理器7Dは、図9に示すように、実施の形態1の信号処理器7Bと比較して、測位手段207と速度算出手段208を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0126】
また、実施の形態3のレーダ♯3とレーダ♯4は、図10に示すように、実施の形態1のレーダ♯2と比較して、送信機5と送受切替器3Bがなく、信号処理器7Bに代えて信号処理器7Eを有することが異なっている。
【0127】
信号処理器7Eは、実施の形態1の信号処理器7Bの測距手段204の代わりに測距手段204Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0128】
また、測位手段207と速度算出手段208は、レーダ♯1、♯3、♯4や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0129】
つぎに、この実施の形態3に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0130】
図12は、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4の信号処理器の処理動作を示す図である。図13は、この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対距離を説明するための図である。図14は、この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対位置ベクトルを説明するための図である。図15は、この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対速度ベクトルを説明するための図である。
【0131】
測距手段204Bは、積分手段203から入力される周波数スペクトルRf(i,kh,l)を用いて目標との相対距離Rpeak(i)を次の式(39)に従って算出する。ここで、真値と区別し、式(39)により算出された目標との相対距離であることを表すために’を付している。
【0132】
【数28】
【0133】
測位手段207に、測距手段204と測距手段204Bから入力される目標との相対距離Rpeak(i)と、目標の初期位置Ptgt=(xtgt,ytgt)から、次の式(40)の測位方程式が成り立つ。
【0134】
【数29】
【0135】
また、式(40)の両辺を二乗し展開すると、次の式(41)のように表される。
【0136】
【数30】
【0137】
測位方程式を解くために、式(41)中のxtgt2,ytgt2の項を消去すると次の式(42)のように表される。
【0138】
【数31】
【0139】
また、式(42)を行列として、次の式(43)のように表す。また、式(43)は、式(44)により表される。ただし、AP,Ptgt,BPは式(45)により表される。
【0140】
【数32】
【0141】
測位手段207は、式(44)を次の式(46)に従い解くことによって、目標の初期位置P’tgtを算出する。ここで、真値と区別し、式(46)により算出された目標との初期位置であることを表すために’を付している。
【0142】
【数33】
【0143】
速度算出手段208は、測位手段207の出力である目標の初期位置P’tgt、初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)、既知であるレーダの初期位置Piと速度viから、目標の速度vtgt=(vxtgt,vytgt)を算出する。
【0144】
測位手段207の出力である目標の初期位置P’tgt、既知であるレーダの初期位置Piと速度vi、目標の速度vtgtから、次の式(47)が成り立つ。ここで、式(48)で表されるvtgt,iは目標とレーダとの相対速度ベクトル、式(49)で表されるP’tgt,iは目標とレーダとの相対位置ベクトル、θiは目標とレーダとの相対速度ベクトルと目標とレーダとの相対位置ベクトルのなす角、|W|はベクトルWの絶対値を表す。
【0145】
【数34】
【0146】
初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)は、|vtgt,i|cosθi≒(ほぼ等しい)v’0R(i)の関係にあり、式(47)は式(48)と式(49)を用いて、次の式(50)のように表すことができる。
【0147】
【数35】
【0148】
さらに、式(50)は行列式として次の式(51)により表される。また、式(51)は、式(52)により表される。ただし、APv、vtgtT、BPvは式(53)により表される。
【0149】
【数36】
【0150】
速度算出手段208は、式(52)を次の式(54)に従い解き、目標の速度v’tgtを算出する。ここで、ZTは行列Zの転置、Z−1は行列Zの逆行列を表す。また、真値と区別し、式(54)により算出された目標の速度であることを表すために’を付している。また、速度算出手段208の説明において、分離配置された4つのレーダの初期位置Piと速度viを用いたが、2次元ジオメトリーにおいて分離配置された2つ以上のレーダの初期位置Piと速度viを用いて、2次元ジオメトリーにおける目標の速度を算出することが可能である。
【0151】
【数37】
【0152】
このように、実施の形態3によれば、実施の形態1にレーダ♯3とレーダ♯4を追加したことにより、精度の良い3つの測距結果から目標の測位をすることが可能になり、さらに、測位結果を用いて目標の速度を算出することが可能になり、測位性能と速度算出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0153】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0154】
実施の形態4.
この発明の実施の形態4に係るマルチスタティックレーダ装置について図16から図18までを参照しながら説明する。この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0155】
すなわち、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0156】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0157】
図16は、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0158】
図16において、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Fと、表示器8とが設けられている。
【0159】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0160】
図17は、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成を示す図である。
【0161】
図17において、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯3及び♯4は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Gとが設けられている。
【0162】
なお、第4の受信手段は、レーダ♯3の空中線1Dと、受信機4Cとから構成される。また、第5の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。第6の受信手段は、レーダ♯4の空中線1Dと、受信機4Cとから構成される。また、第7の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。
【0163】
また、レーダ♯1〜レーダ♯4は、上記の実施の形態3の図11と同様に、2次元ジオメトリーで分離配置されている。
【0164】
この発明の実施の形態4に係るマルチスタティックレーダ装置は、上記の実施の形態2に係るマルチスタティックレーダ装置と比較して、信号処理器7F、7Gが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態4の信号処理器7Fは、図16に示すように、実施の形態2の信号処理器7Cと比較して、測位手段207と速度算出手段208を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0165】
また、実施の形態4の信号処理器7Gは、図17に示すように、実施の形態2の信号処理器7Cと比較して、送信機5と送受切替器3Bがなく、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0166】
また、測位手段207と速度算出手段208は、レーダ♯1、♯3、♯4や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0167】
つぎに、この実施の形態4に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0168】
図18は、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4の信号処理器の処理動作を示す図である。
【0169】
測位手段207は、3つのレーダの積分手段203の出力である周波数スペクトルRf(i,kh,l)の最大振幅を示す距離Rpeak(i)を用いて、式(46)に従い、目標の初期位置P’tgtを算出する。
【0170】
速度算出手段208は、測位手段207の出力である目標の初期位置P’tgt、初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)、既知であるレーダの初期位置Piと速度viから式(52)を式(54)に従い、目標の速度v’tgtを算出する。
【0171】
このように、実施の形態4によれば、第2の受信ビデオ信号に対しチャープパルス圧縮した後、レンジ補正、加速度補償をすることにより、目標との相対距離を考慮せず補償することができ、遠距離移動目標に対する目標検出性能を改善し、さらに3つのレーダの測距結果を用いた遠距離移動目標に対する測位性能と速度算出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0172】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0173】
実施の形態5.
この発明の実施の形態5に係るマルチスタティックレーダ装置について図19を参照しながら説明する。この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0174】
すなわち、この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0175】
図19は、この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0176】
図19において、この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Hと、表示器8とが設けられている。なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0177】
この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成は、上記の実施の形態3の図10と同様である。
【0178】
すなわち、この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯3及び♯4は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Eとが設けられている。
【0179】
また、レーダ♯1〜レーダ♯4は、上記の実施の形態3の図11と同様に、2次元ジオメトリーで分離配置されている。
【0180】
この発明の実施の形態5に係るマルチスタティックレーダ装置は、上記の実施の形態3に係るマルチスタティックレーダ装置と比較して、信号処理器7Hが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態5の信号処理器7Hは、図19に示すように、実施の形態3の信号処理器7Dの測位手段207に代えて、測位手段207Bを備えることが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0181】
また、測位手段207Bと速度算出手段208は、レーダ♯1、♯3、♯4や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0182】
つぎに、この実施の形態5に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0183】
測位手段207Bは、測距手段204から入力される目標との相対距離Rpeak(i)、未知である目標の初期位置Ptgt=(xtgt,ytgt)と、既知であるレーダの初期位置Pi=(xi,yi)を用いて、G(i,xtgt,ytgt)を次の式(55)のように定義する。
【0184】
【数38】
【0185】
また、G(i,xtgt,ytgt)に対して、xtgt,ytgtについて偏微分して次の式(56)により近似式が得られる。
【0186】
【数39】
【0187】
ここで、ハットxtgt,ハットytgtはxtgt,ytgtの近似値を表す。また、式(56)を行列として、次の式(57)のように表す。また、式(57)は、式(58)により表される。ただし、チルダAP,δチルダPtgt,チルダBPは式(59)により表される。
【0188】
【数40】
【0189】
ここで、δチルダPtgtは真の目標の初期位置と目標の初期位置の近似値の差であり、逐次近似法による補正量である。式(58)を次の式(60)により解くことによって、逐次近似法による補正量δチルダPtgtを算出することが可能になる。
【0190】
【数41】
【0191】
測距手段204あるいは測距手段204Bに誤差が含まれている場合、測位手段207が算出する目標の初期位置には誤差が含まれる。測位手段207Bは、測位精度を向上させるために、式(60)と次の式(61)により目標の初期位置の近似値ハットxtgt,ハットytgtを繰り返し更新し、逐次近似法による補正量δPtgtが十分小さくなるまで行い、2次元ジオメトリーにおける目標の初期位置チルダP’tgtを算出する。また、測位手段207Bは、目標の初期位置の近似値の初期設定として、式(46)により算出される目標との初期位置の位置P’tgtを用いる。ここで、ハットx’tgt,ハットy’tgtは更新された目標の初期位置の近似値、チルダP’tgt=(ハットx’tgt,ハットy’tgt)は式(60)と次の式(61)により最終的に算出した目標の初期位置を表す。また、真値と区別し、チルダP’tgt=(ハットx’tgt,ハットy’tgt)は式(60)と次の式(61)により最終的に算出した目標の初期位置を表すために’を付している。また、レーダ♯1あるいはレーダ♯2の送信方向等をもとに、ある程度目標の初期位置を推定できる場合は、レーダ♯1あるいはレーダ♯2の送信方向の位置を目標の初期位置の近似値の初期設定にすることにより、レーダ♯4を使用せず、測位手段207Bによる目標の初期位置を算出することが可能である。
【0192】
【数42】
【0193】
このように、実施の形態5によれば、実施の形態3の信号処理器7Dの測位手段207に代えて、測位手段207Bを備えることにより、精度の良い2次元ジオメトリーにおける目標の位置を算出することが可能になり、測位性能を改善したマルチスタティックレーダ装置を提供することができる。
【0194】
また、実施の形態4の信号処理器7Fの測位手段207に代えて、測位手段207Bを備えることにより、同様な効果を得るマルチスタティックレーダ装置を提供することができる。
【0195】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0196】
実施の形態6.
この発明の実施の形態6に係るマルチスタティックレーダ装置について図20から図24までを参照しながら説明する。この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0197】
すなわち、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0198】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0199】
図20は、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0200】
図20において、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Iと、表示器8とが設けられている。
【0201】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0202】
この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯3、レーダ♯4及びレーダ♯5の構成は、上記の実施の形態3の図10と同様である。
【0203】
すなわち、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯3、♯4及び♯5は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Eとが設けられている。
【0204】
なお、第4の受信手段は、レーダ♯3の空中線1Dと、受信機4Cとから構成される。また、第5の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。第6の受信手段は、レーダ♯4の空中線1Dと、受信機4Cとから構成される。また、第7の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。第8の受信手段は、レーダ♯5の空中線1Dと、受信機4Cとから構成される。また、第9の受信手段は、レーダ♯5の空中線1Eと、受信機6Bととから構成される。
【0205】
図21は、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【0206】
図21において、この実施の形態6は、3次元ジオメトリーを想定しており、5つのレーダは3次元ジオメトリーで分離配置されている。
【0207】
この発明の実施の形態6に係るマルチスタティックレーダ装置は、上記の実施の形態3に係るマルチスタティックレーダ装置と比較して、レーダ♯2の信号処理器7Iが異なり、また、レーダ♯5が加えられており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態6の信号処理器7Iは、図20に示すように、実施の形態3の信号処理器7Dと比較して、測位手段207と速度算出手段208に代えて、測位手段207Cと速度算出手段208Bを備えることが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0208】
また、実施の形態6のレーダ♯5は、実施の形態3のレーダ♯3とレーダ♯4と同様であるので、説明を省略する。
【0209】
また、測位手段207Bと速度算出手段208は、レーダ♯1、♯3、♯4、♯5や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0210】
つぎに、この実施の形態6に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0211】
図22は、この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対距離を説明するための図である。図23は、この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対位置ベクトルを説明するための図である。図24は、この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対速度ベクトルを説明するための図である。
【0212】
測位手段207Cに、測距手段204と測距手段204Bから入力される目標との相対距離Rpeak(i)と、目標の初期位置P3,tgt=(xtgt,ytgt,ztgt)から、次の式(62)の測位方程式が成り立つ。また、式(62)の両辺を二乗し展開すると、式(63)のように表される。
【0213】
【数43】
【0214】
測位方程式を解くために、式(63)中のxtgt2,ytgt2,ztgt2の項を消去すると次の式(64)のように表される。
【0215】
【数44】
【0216】
また、式(64)を行列として、次の式(65)のように表す。また、式(65)は、式(66)により表される。ただし、A3,P,P3,tgt,B3,Pは式(67)により表される。
【0217】
【数45】
【0218】
測位手段207Cは、式(66)を次の式(68)に従い、目標の初期位置P’3,tgtを算出する。ここで、真値と区別し、式(68)により算出された目標との初期位置であることを表すために’を付している。
【0219】
【数46】
【0220】
速度算出手段208Bは、測位手段207Cの出力である目標の初期位置P’3,tgt、初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)、既知であるレーダの初期位置P3,iと速度v3,i=(vxi,vyi,vzi)から、目標の速度v3,tgt=(vxtgt,vytgt,vztgt)を算出する。測位手段207Cの出力である目標の初期位置P’3,tgt、既知であるレーダの初期位置P3,iと速度v3,i、目標の速度v3,tgtから、次の式(69)が成り立つ。ここで、式(70)で表されるv3,tgt,iは目標とレーダとの相対速度ベクトル、式(71)で表されるP’3,tgt,iは目標とレーダとの相対位置ベクトル、θ3,iは目標とレーダとの相対速度ベクトルと目標とレーダとの相対位置ベクトルのなす角、|W|はベクトルWの絶対値を表す。
【0221】
【数47】
【0222】
初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)は|v3,tgt,i|cosθ3,i≒(ほぼ等しい)v’0R(i)の関係にあり、式(69)は式(70)と式(71)を用いて次の式(72)のように表すことができる。
【0223】
【数48】
【0224】
さらに、式(72)は行列式として、次の式(73)により表される。また、式(73)は、式(74)により表される。ただし、A3,Pv、v3,tgtT、B3,Pvは式(75)により表される。
【0225】
【数49】
【0226】
速度算出手段208Bは、式(74)を次の式(76)に従い解き、3次元ジオメトリーにおける目標の速度v’3,tgtを算出する。ここで、ZTは行列Zの転置、Z−1は行列Zの逆行列を表す。また、真値と区別し、式(76)により算出された目標の速度であることを表すために’を付している。また、速度算出手段208Bの説明において、分離配置された5つのレーダの初期位置P3,iと速度v3,iを用いたが、3次元ジオメトリーにおいて分離配置された3つ以上のレーダの初期位置P3,iと速度v3,iを用いて、3次元ジオメトリーにおける目標の速度を算出することが可能である。
【0227】
【数50】
【0228】
このように、実施の形態6によれば、実施の形態3の信号処理器7Dの測位手段207と速度算出手段208に代えて、測位手段207Cと速度算出手段208Bを備えることにより、4つの測距結果から3次元ジオメトリーにおける目標の測位をすることが可能になり、さらに、測位結果を用いて3次元ジオメトリーにおける目標の速度を算出することが可能になり、3次元ジオメトリーにおける測位性能と速度算出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0229】
また、実施の形態4の信号処理器7Dの測位手段207と速度算出手段208に代えて、測位手段207Cと速度算出手段208Bを備えることにより、同様な効果を得るマルチスタティックレーダ装置を提供することができる。
【0230】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0231】
実施の形態7.
この発明の実施の形態7に係るマルチスタティックレーダ装置について図25を参照しながら説明する。この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0232】
すなわち、この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0233】
図25は、この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0234】
図25において、この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Jと、表示器8とが設けられている。
【0235】
この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯3、レーダ♯4及びレーダ♯5の構成は、上記の実施の形態3の図10と同様である。
【0236】
すなわち、この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯3、♯4及び♯5は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Eとが設けられている。
【0237】
また、5つのレーダは、上記の実施の形態6の図21と同様に、3次元ジオメトリーで分離配置されている。
【0238】
この発明の実施の形態7に係るマルチスタティックレーダ装置は、上記の実施の形態6に係るマルチスタティックレーダ装置と比較して、信号処理器7Jが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態7の信号処理器7Jは、図25に示すように、実施の形態6の信号処理器7Iの測位手段207Cに代えて、測位手段207Dを備えることが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0239】
また、測位手段207Dと速度算出手段208Bは、レーダ♯1、♯3、♯4、♯5や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0240】
つぎに、この実施の形態7に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0241】
測位手段207Dは、測距手段204と測距手段204Bから入力される目標との相対距離Rpeak(i)、目標の初期位置P3,tgt=(xtgt,ytgt,ztgt)と、既知であるレーダの初期位置P3,i=(xi,yi,zi)を用いて、G3(i,xtgt,ytgt,ztgt)を次の式(77)のように定義する。
【0242】
【数51】
【0243】
また、G3(i,xtgt,ytgt,ztgt)に対して、xtgt,ytgt,ztgtについて偏微分して次の式(78)により近似式が得られる。
【0244】
【数52】
【0245】
ここで、ハットxtgt,ハットytgt,ハットztgtはxtgt,ytgt,ztgtの近似値を表す。
【0246】
また、式(78)を行列として、次の式(79)のように表す。また、式(79)は、式(80)により表される。ただし、チルダA3,P,δチルダP3,tgt,チルダB3,Pは式(81)により表される。
【0247】
【数53】
【0248】
ここで、δチルダP3,tgtは真の目標の初期位置と目標の初期位置の近似値の差であり、逐次近似法による補正量である。式(80)を次の式(82)により解くことによって、逐次近似法による補正量δチルダP3,tgtを算出することが可能になる。
【0249】
【数54】
【0250】
測距手段204あるいは測距手段204Bに誤差が含まれている場合、測位手段207Cが算出する目標の初期位置には誤差が含まれる。測位手段207Dは、測位精度を向上させるために、式(82)と次の式(83)により目標の初期位置の近似値ハットxtgt,ハットytgt,ハットztgtを繰り返し更新し、逐次近似法による補正量δチルダP3,tgtが十分小さくなるまで行い、目標の初期位置P’3,tgtを算出する。また、測位手段207Dは、目標の初期位置の近似値の初期設定として、式(68)により算出される目標との初期位置の位置P’3,tgtを用いる。ここで、ハットx’tgt,ハットy’tgt,ハットz’tgtは更新された目標の初期位置の近似値、チルダP’tgt=(ハットx’tgt,ハットy’tgt,ハットz’tgt)は式(82)と次の式(83)により最終的に算出した目標の初期位置を表す。また、真値と区別し、チルダP’tgt=(ハットx’tgt,ハットy’tgt,ハットz’tgt)は式(82)と次の式(83)により最終的に算出した目標の初期位置を表すために’を付している。また、レーダ♯1あるいはレーダ♯2の送信方向等をもとに、ある程度目標の初期位置を推定できる場合は、レーダ♯1あるいはレーダ♯2の送信方向の位置を目標の初期位置の近似値の初期設定にすることにより、レーダ♯5を使用せず、測位手段207Dによる目標の初期位置を算出することが可能である。
【0251】
【数55】
【0252】
このように、実施の形態7によれば、実施の形態6の信号処理器7Iの測位手段207Cに代えて、測位手段207Dを備えることにより、精度の良い3次元ジオメトリーにおける目標の位置を算出することが可能になり、測位性能を改善したマルチスタティックレーダ装置を提供することができる。
【0253】
また、実施の形態4の信号処理器7Fの測位手段207に代えて、測位手段207Dを備え、かつ、レーダ♯5を加えることにより、同様な効果を得るマルチスタティックレーダ装置を提供することができる。
【0254】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【図面の簡単な説明】
【0255】
【図1】この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1の構成を示す図である。
【図2】この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図3】この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【図4】この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1とレーダ♯2の信号処理器の処理動作を示す図である。
【図5】この発明の実施の形態1に係るマルチスタティックレーダ装置のチャープパルス圧縮の処理動作を示す図である。
【図6】この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図7】この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯1とレーダ♯2の信号処理器の処理動作を示す図である。
【図8】この発明の実施の形態2に係るマルチスタティックレーダ装置のレンジ補正の処理動作を示す図である。
【図9】この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図10】この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成を示す図である。
【図11】この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【図12】この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4の信号処理器の処理動作を示す図である。
【図13】この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対距離を説明するための図である。
【図14】この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対位置ベクトルを説明するための図である。
【図15】この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対速度ベクトルを説明するための図である。
【図16】この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図17】この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成を示す図である。
【図18】この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4の信号処理器の処理動作を示す図である。
【図19】この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図20】この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図21】この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【図22】この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対距離を説明するための図である。
【図23】この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対位置ベクトルを説明するための図である。
【図24】この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対速度ベクトルを説明するための図である。
【図25】この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図26】従来のマルチスタティックレーダ装置の送信局、目標及び受信局の配置を示す図である。
【図27】従来のマルチスタティックレーダ装置の信号処理系統を示す図である。
【符号の説明】
【0256】
1A、1B、1C、1D、1E 空中線、2 送信機、3A、3B 送受切替器、4A、4B、4C 受信機、5 送信機、6A、6B 受信機、7A、7B、7C、7D、7E、7F、7G、7H、7I、7J 信号処理器、8 表示器、101 ドップラー周波数算出手段、102 相対速度算出手段、103 初期相対速度・相対加速度算出手段、201 速度補償手段、202 相関手段、203 積分手段、204 測距手段、204B 測距手段、204 測距手段、205 レンジ補正手段、206 加速度補償手段、207 測位手段、207B、207C、207D 測位手段、208 速度算出手段、208B 速度算出手段。
【技術分野】
【0001】
この発明は、目標検出性能を改善したマルチスタティックレーダ装置に関するものである。
【背景技術】
【0002】
従来のマルチスタティックレーダ装置について図26及び図27を参照しながら説明する(例えば、非特許文献1参照)。図26は、従来のマルチスタティックレーダ装置の送信局、目標及び受信局の配置を示す図である。また、図27は、従来のマルチスタティックレーダ装置の信号処理系統を示す図である。ここでは、非特許文献1で示された長時間積分の方法について説明する。
【0003】
図26に示すように、3つの送信局S1、S2、S3、1つの受信局Oにより目標Tの位置を算出する。送信波は符号変調されており、正確あるいは真値に近いドップラー周波数を用いて、図27に示すように、反射波受信信号に対しドップラー変位の位相補正を行わなければ、コヒーレント積分の効率が劣化する。非特許文献1では、ドップラー周波数を算出することができないため、複数のドップラー周波数を用いて補正し、相関演算、コヒーレント積分を行っている。その結果、最も積分効率が良かった結果を抽出することによって、長時間積分による積分効率の向上を図る。
【0004】
このマルチスタティックレーダ装置では、コヒーレント積分を利用するため、ノンコヒーレント積分に代表される振幅情報のみを用いる積分方式に比べ、信号対雑音電力比SNR(Signal to Noise Ratio)の改善により、目標検出性能の改善が期待できる。
【0005】
【非特許文献1】三島 哲生、松田 庄司、岡村 敦、‘符号化された電波を利用するマルチスタティック・レーダのフィールド実験’、電子情報通信学会技術研究報告、Vol.92、No.81(SANE92 6−11)、Page1−8(1992,05,29)
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、上述したような従来のマルチスタティックレーダ装置では、パルス間コヒーレント積分を行うために、目標の速度が未知なため、複数のドップラー補正量を用いて位相補正を行う必要があり、処理量が増大するという問題点があった。
【0007】
この発明は、上述のような課題を解決するためになされたもので、その目的は、パルス間コヒーレント積分を行い、処理量を少なくすることができ、目標検出性能を改善することができるマルチスタティックレーダ装置を得るものである。
【課題を解決するための手段】
【0008】
この発明に係るマルチスタティックレーダ装置は、第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、前記第1の受信信号からドップラー周波数を算出する第1の信号処理器とを有する第1のレーダと、前記第1のレーダと2次元ジオメトリーで分離配置され、目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、第2のキャリア信号をパルス変調した第2の送信信号を放射する第2の送信手段と、目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、前記第1の受信信号からドップラー周波数を算出し、算出されたドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出し、前記相対速度を用いて、前記第3の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行い、前記速度補償された第2の受信信号を相関演算し、前記相関演算された第2の受信信号を積分し、積分することにより生成された信号の強度に基づき目標との相対距離を算出する第2の信号処理器を有する第2のレーダとを設けたものである。
【発明の効果】
【0009】
この発明に係るマルチスタティックレーダ装置は、第1の受信信号を利用し、各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、その速度補償量を用いて第2の受信信号に対し速度補償を行うので、複数のドップラー補正量を用いる必要がなくなり、処理量を少なくすることができ、移動目標に対する目標検出性能を改善することができるという効果を奏する。
【発明を実施するための最良の形態】
【0010】
実施の形態1.
この発明の実施の形態1に係るマルチスタティックレーダ装置について図1から図5までを参照しながら説明する。図1は、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1の構成を示す図である。なお、以降では、各図中、同一符号は同一又は相当部分を示す。
【0011】
図1において、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0012】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0013】
また、信号処理器7Aは、ドップラー周波数算出手段101が設けられている。
【0014】
図2は、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0015】
図2において、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Bと、表示器8とが設けられている。
【0016】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0017】
また、信号処理器7Bは、ドップラー周波数算出手段101と、相対速度算出手段102と、初期相対速度・相対加速度算出手段103と、速度補償手段201と、相関手段202と、積分手段203と、測距手段204とが設けられている。
【0018】
なお、信号処理器7A、7Bは、CPU、RAM、ROM、インターフェース回路を有するコンピュータから構成され、ROMに記憶されるプログラムに従ってCPUで演算処理が行われる。また、信号処理器7A、7Bは、ネットワークを介して処理結果等の情報が共有されている。
【0019】
図3は、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【0020】
図3に示すように、レーダ♯1とレーダ♯2は2次元ジオメトリーで分離配置されている。なお、レーダ♯2は、図2に示すように、空中線1Bと空中線1Cを有しているが、図3では1つの空中線で代表して示している。
【0021】
つぎに、この実施の形態1に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0022】
まず、レーダ♯1が第1の受信ビデオ信号を生成するまでの動作について説明する。送信機2は、第1のキャリア信号を目標との相対速度がアンビギュイティなく計測可能なパルス繰り返し周期PRI(Pulse Repetition Interval)でパルス変調して第1の送信RF信号を生成し、送受切替器3Aに出力する。この送受切替器3Aは、送信機2から入力された第1の送信RF信号を空中線1Aに出力する。そして、空中線1Aから第1の送信RF信号が空中に放射される。
【0023】
空中に放射された第1の送信RF信号は、目標で反射され、第1の反射RF信号として空中線1Aに入射する。そこで、空中線1Aは、入射してきた第1の反射RF信号を受信し、第1の受信RF信号として送受切替器3Aに出力する。送受切替器3Aは、空中線1Aから入力された第1の受信RF信号を受信機4Aに出力する。受信機4Aは、送受切替器3Aから入力された第1の受信RF信号を増幅、位相検波の後、第1の受信ビデオ信号に変換し、信号処理器7Aに出力する。
【0024】
次に、レーダ♯2が第1の受信ビデオ信号を生成するまでの動作について説明する。レーダ♯1により空中に放射された第1の送信RF信号は、目標で反射され、第1の反射RF信号としてレーダ♯2の空中線1Bに入射する。そこで、空中線1Bは、入射してきた第1の反射RF信号を受信し、第1の受信RF信号として受信機4Bに出力する。受信機4Aは、空中線1Bから入力された第1の受信RF信号を増幅、位相検波の後、第1の受信ビデオ信号に変換し、信号処理器7Bに出力する。
【0025】
また、レーダ♯2が第2の受信ビデオ信号を生成するまでの動作について説明する。送信機5は、キャリア信号を目標との相対距離がアンビギュイティなく計測可能な周波数になるようなパルス繰り返し周期でパルス変調し、さらにパルス内をアップチャープ変調あるいはダウンチャープ変調することを繰り返して第2の送信RF信号を生成し、送受切替器3Bに出力する。送受切替器3Bは、送信機5から入力された第2の送信RF信号を空中線1Cに出力する。そして、空中線1Cから第2の送信RF信号が空中に放射される。
【0026】
空中に放射された第2の送信RF信号は、目標で反射され、第2の反射RF信号として空中線1Cに入射する。そこで、空中線1Cは、入射してきた第2の反射RF信号を受信し、第2の受信RF信号として送受切替器3Bに出力する。送受切替器3Bは、空中線1Cから入力された第2の受信RF信号を受信機6Aに出力する。受信機6Aは、送受切替器3Bから入力された第2の受信RF信号を増幅、位相検波の後、第2の受信ビデオ信号に変換し、信号処理器7Bに出力する。
【0027】
ここで、以下の説明において、目標との相対速度がアンビギュイティなく計測可能な時間間隔になるようなパルス繰り返し周期PRIをTpri,H、目標との相対距離がアンビギュイティなく計測可能な時間間隔になるようなパルス繰り返し周期をTpri,Lと略記する。
【0028】
次に、レーダ♯1の信号処理器7Aとレーダ♯2の信号処理器7Bの処理動作について図4及び図5を参照して説明する。図4は、この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1とレーダ♯2の信号処理器の処理動作を示す図である。また、図5は、この発明の実施の形態1に係るマルチスタティックレーダ装置のチャープパルス圧縮の処理動作を示す図である。
【0029】
ドップラー周波数算出手段101に入力される第1の受信ビデオ信号VH(i,ncpi,H,mH)は、次の式(1)で表される。
【0030】
【数1】
【0031】
ここで、A’H(i)は第1の受信ビデオ信号の振幅、f0,Hは第1の送信RF信号の送信中心周波数、RT,H(ncpi,H)は目標と第1の送信RF信号を送信するレーダとの相対距離、RR,H(i,ncpi,H)は目標と第1の反射RF信号を受信するレーダとの相対距離、v0T(Hno)は目標と第1の送信RF信号を送信するレーダとの初期相対速度、aT(Hno)は目標と第1の送信RF信号を送信するレーダとの相対加速度、v0R(i)は目標と第1の反射RF信号を受信するレーダとの初期相対速度、aR(i)は目標と第1の反射RF信号を受信するレーダとの相対加速度、Tcpi,HはCPI(Coherent Pulse Interval)、iはレーダ番号、Hnoは第1の送信RF信号を送信するレーダ番号(Hno=1として説明している)、ncpiはCPI番号、NcpiはCPI数、mHは1CPI内のサンプリング番号、MHは1CPIのA/Dサンプリング点数、Rdr_numはレーダ数を表す。
【0032】
目標と第1の送信RF信号を送信するレーダとの相対距離RT,H(nH)は、次の式(2)により表される。ここで、R0T(Hno)は目標と第1の送信RF信号を送信するレーダとの初期相対距離を表す。
【0033】
【数2】
【0034】
目標と第1の反射RF信号を受信するレーダとの相対距離RR,H(i,ncpi,H)は、次の式(3)により表される。ここで、R0R(i)は目標と第1の反射RF信号を受信するレーダとの初期相対距離を表す。
【0035】
【数3】
【0036】
ドップラー周波数算出手段101は、入力された第1の受信ビデオ信号VH(i,ncpi,H,mH)を、次の式(4)に従い高速フーリエ変換FFT(Fast Fourier Transform)を行い、時間領域の第1の受信ビデオ信号を周波数領域の第1の受信ビデオ信号FVH(i,ncpi,H,kf)に変換する。
【0037】
【数4】
【0038】
ここで、lHはサンプリング番号、LHは第1の受信ビデオ信号に対するFFT点数、kfは周波数領域の第1の受信ビデオ信号の周波数ビン番号を表す。
【0039】
ドップラー周波数算出手段101は、周波数領域の第1の受信ビデオ信号FVH(i,ncpi,H,kf)の最大振幅を示すドップラー周波数fd(i,ncpi,H)を次の式(5)に従って算出する。
【0040】
【数5】
【0041】
ここで、max_F(FX)は、周波数領域の信号FXの最大振幅を示すドップラー周波数を表す。
【0042】
相対速度算出手段102に入力されたドップラー周波数fd(i,ncpi,H)は、目標と第1の送信RF信号を送信するレーダとの相対速度vT(Hno,ncpi,H)と目標と第1の反射RF信号を受信するレーダの相対速度vR(i,ncpi,H)から、次の式(6)により表される。
【0043】
【数6】
【0044】
ただし、第1の送信RF信号を送信し、第1の反射RF信号を受信するレーダ♯1は、vT(Hno,ncpi,H)=vR(i,ncpi,H)の関係になり、次の式(7)により表される。
【0045】
【数7】
【0046】
相対速度算出手段102は、目標と第1の送信RF信号を送信し、第1の反射RF信号を受信するレーダとの相対速度v’R(i,ncpi,H)を次の式(8)により算出する。
【0047】
【数8】
【0048】
また、相対速度算出手段102は、目標と第1の反射RF信号を受信するレーダの相対速度との相対速度v’R(i,ncpi,H)を次の式(9)により算出する。
【0049】
【数9】
【0050】
ここで、真値と区別し、式(8)、式(9)により算出された目標とレーダとの相対速度であることを表すために’を付している。以降、v’R(i,ncpi,H)を目標との相対速度と記述する。
【0051】
初期相対速度・相対加速度算出手段103に入力された各CPIで算出された目標との相対速度v’R(i,ncpi,H)と、目標との初期相対速度v0R(i)、目標との相対加速度aR(i)は、次の式(10)により表される。また、式(10)は、式(11)により表される。ただし、AH、XH(i)、BH(i)は式(12)により表される。
【0052】
【数10】
【0053】
初期相対速度・相対加速度算出手段103は、式(11)を次の式(13)に従い解き、目標との初期相対速度v0R(i)、目標との相対加速度aR(i)を算出する。
【0054】
【数11】
【0055】
ここで、ZTは行列Zの転置、Z−1は行列Zの逆行列を表す。また、真値と区別し、式(13)により算出された目標との初期相対速度、相対加速度であることを表すために’を付している。
【0056】
速度補償手段201に入力される第2の受信ビデオ信号VL(i,nL,mL)は、次の式(14)で表される。
【0057】
【数12】
【0058】
ここで、f0,Lは第2の送信RF信号の送信中心周波数、Tpri,Lは第2の送信RF信号のパルス繰り返し周期、B0,Lは第2の送信RF信号の送信帯域幅、T0,Lは第2の送信RF信号の送信パルス幅、φ0,Lは第2の送信RF信号の初期位相、A’L(i)は第2の受信ビデオ信号の振幅、RT,L(nL)は目標と第2の送信RF信号を送信するレーダとの相対距離、RR,L(i,nL)は目標と第2の反射信号を受信するレーダとの相対距離、v0T(Lno)は目標と第2の送信RF信号を送信するレーダとの初期相対速度、aT(Lno)は目標と第2の送信RF信号を送信するレーダとの相対加速度、v0R(i)は目標と第2の反射RF信号を受信するレーダとの初期相対速度、aR(i)は目標と第2の反射信号を受信するレーダとの相対加速度、Lnoは第2の送信RF信号を送信するレーダ番号(Lno=2として説明している)、nLは第2の送信RF信号のパルス番号、NLは第2の送信RF信号のパルス数、ΔtLは第2の受信ビデオ信号に対するA/Dサンプリング周期、mLは第2の受信ビデオ信号に対するA/Dサンプリング番号、MLは1PRIのA/Dサンプリング点数を表す。また、chirpは第2の送信RF信号がアップチャープ変調のとき1が代入され、ダウンチャープ変調のとき−1が代入される。
【0059】
目標と第2の送信RF信号を送信するレーダとの相対距離RT,L(nL)は、次の式(15)により表される。ここで、R0T(Lno)は目標と第2の送信RF信号を送信するレーダとの初期相対距離を表す。
【0060】
【数13】
【0061】
目標と第2の反射信号を受信するレーダとの相対距離RR,L(i,nL)は、次の式(16)により表される。ここで、R0R(i)は目標と第2の反射信号を受信するレーダとの初期相対距離を表す。
【0062】
【数14】
【0063】
速度補償手段201は、初期相対速度・相対加速度算出手段103から入力される目標との初期相対速度v’0R(i)、相対加速度a’R(i)を用いて、チャープパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるような速度補償量vcor,L(i,nL,mL)を、式(17)に従い算出する。ただし、目標とレーダとの初期相対速度の和v0TR(i)は式(18)、目標とレーダとの相対加速度の和aTR(i)は式(19)により表される。
【0064】
【数15】
【0065】
そして、速度補償手段201は、速度補償量vcor,L(i,nL,mL)を用いて第2の受信ビデオ信号VL(i,nL,mL)の速度補償を次の式(20)に従って行い、速度補償後の第2の受信ビデオ信号V’L(i,nL,mL)を出力する。
【0066】
【数16】
【0067】
相関手段202は、速度補償後の第2の受信ビデオ信号V’L(i,nL,mL)と参照信号の相関演算を行い、チャープパルス圧縮を行う。相関手段202で用いる第2の送信RF信号の変調成分と複素共役の関係にある参照信号Ex(mτ)は、次の式(21)で表される。ここで、A’は参照信号の振幅、mτは参照信号のサンプリング番号を表す。また、参照信号のサンプリング点数Mτは、次の式(22)により表される。ここで、Samp_fは第2の受信ビデオ信号に対するサンプリング周波数を表す。
【0068】
【数17】
【0069】
相関手段202は、速度補償後の第2の受信ビデオ信号V’L(i,nL,mL)と参照信号Ex(mτ)を、次の式(23)、式(24)により、それぞれFFTした後、式(25)に従い、乗算する。ここで、lはレンジビン番号、L’はレンジ方向FFT点数を表す。ただし、L’>MLの時にはV’L(i,nL,mL)に0を代入し、L’>Mτの時にはEx(mτ)に0を代入する。
【0070】
【数18】
【0071】
また、相関演算後の信号を第2の受信ビデオ信号に対するA/Dサンプリング間隔よりも高精度にサンプリングする場合は、相関手段202は次の式(26)により0を設定する。ここで、Lはレンジ方向高速フーリエ逆変換IFFT(Inverse Fast Fourier Transform)点数であり、次の式(27)により表される。ただし、qは0以上の整数である。また、q=0の場合は、A/Dサンプリング間隔と同じサンプリング間隔になる。
【0072】
【数19】
【0073】
最後に、相関手段202は、乗算結果を、次の式(28)により高速フーリエ逆変換IFFTを行い、相関演算の結果、すなわちチャープパルス圧縮後の信号RV・Ex(i,nL,l)を出力する。
【0074】
【数20】
【0075】
このような処理を行うことによって、図5に示すように、第2の受信ビデオ信号に対し速度補償を行った後、チャープパルス圧縮により生成された信号の振幅が最大を示す目標までの距離が同一になり、かつ、パルス間でコヒーレントになり、パルス間コヒーレント積分が可能になる。
【0076】
積分手段203は、パルス間での積分を行うものであり、相関手段202の出力であるチャープパルス圧縮後の信号RV・Ex(i,nL,l)を入力とし、例えば、高速フーリエ変換処理等を行い、レンジビン毎の信号成分、即ち、周波数スペクトルRf(i,kh,l)を次の式(29)に従って求めることにより、各周波数ビンの積分を行う。ここで、khは周波数ビン番号、Hはパルス方向FFT点数を表す。ただし、H>NLの時にはRV・Ex(i,nL,l)に0埋めを行う。
【0077】
【数21】
【0078】
測距手段204は、積分手段203から入力される周波数スペクトルRf(i,kh,l)を用いて目標との相対距離Rpeak(i)を次の式(30)に従って算出する。ここで、max_R(FS)は、周波数スペクトルFSの最大振幅を示す距離を表す。
【0079】
【数22】
【0080】
表示器8は、信号処理器7Bから入力される処理結果を表示する。
【0081】
このように、実施の形態1によれば、第1の受信ビデオ信号を利用し、第2の受信ビデオ信号がコヒーレントになる速度補償量を算出し、その速度補償量を用いて第2の受信ビデオ信号に対し速度補償を行うので、複数のドップラー補正量を用いる必要がなくなり、処理量が少なく、移動目標に対する目標検出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0082】
また、速度補償後の第2の受信ビデオ信号に対し、相関演算することにより、移動目標に対する目標検出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0083】
また、実施の形態1の相関手段202は、速度補償手段201と積分手段203の間に配置されているが、積分手段203と測距手段204の間に配置した場合でも同様の効果を得ることが可能になる。
【0084】
また、第1の送信RF信号は第2の送信RF信号よりDuty(=送信パルス幅/パルス繰り返し周期)が高いことや、第1の送信RF信号を送信するレーダを第2の送信RF信号を送信するレーダより目標に近い距離に分離配置することにより、第2の送信RF信号を送信するレーダの最大探知距離を延伸することが可能になる。
【0085】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0086】
さらに、3次元ジオメトリーにおいても同様の効果を得ることが可能になる。
【0087】
実施の形態2.
この発明の実施の形態2に係るマルチスタティックレーダ装置について図6から図8までを参照しながら説明する。この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0088】
すなわち、この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0089】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0090】
図6は、この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0091】
図6において、この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Cと、表示器8とが設けられている。
【0092】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0093】
また、レーダ♯1とレーダ♯2は、上記の実施の形態1の図3と同様に、2次元ジオメトリーで分離配置されている。
【0094】
この発明の実施の形態2に係るマルチスタティックレーダ装置は、上記の実施の形態1に係るマルチスタティックレーダ装置と比較して、上述したように、レーダ♯2の信号処理器7Cが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、この実施の形態2の信号処理器7Cは、図6に示すように、上記の実施の形態1の信号処理器7Bの速度補償手段201の代わりに、レンジ補正手段205と、加速度補償手段206とを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0095】
つぎに、この実施の形態2に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0096】
この実施の形態2の信号処理器7Cの処理動作について図7及び図8を参照して説明する。図7は、この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯1とレーダ♯2の信号処理器の処理動作を示す図である。また、図8は、この発明の実施の形態2に係るマルチスタティックレーダ装置のレンジ補正の処理動作を示す図である。
【0097】
相関手段202は、速度補償後の第2の受信ビデオ信号V’L(i,nL,mL)に代えて、第2の受信ビデオ信号VL(i,nL,mL)を入力として、参照信号Ex(mτ)との相関演算を式(23)から式(28)までに従って行い、相関演算の結果、すなわちチャープパルス圧縮後の信号RV・Ex(i,nL,l)を出力する。
【0098】
周知のように移動目標からの反射ビデオ信号に対してチャープパルス圧縮を行った場合、目標との相対速度にほぼ比例した距離だけシフトして測距され、各パルスのチャープパルス圧縮後の信号の最大振幅を示すまでの距離RPC,peak(i,nL)は、次の式(31)により表される。この式(31)において、vTR(i,nL)は式(32)で表される各パルスの目標と第2の送信RF信号を送信するレーダとの相対速度と、目標と第2の反射RF信号を受信するレーダとの相対速度の和、RTR(i,nL)は式(33)で表される各パルスの目標と第2の送信RF信号を送信するレーダとの相対距離と、目標と第2の反射RF信号を受信するレーダとの相対距離の和、ΔTは式(34)で表される定数である。
【0099】
【数23】
【0100】
レンジ補正手段205は、初期相対速度・相対加速度算出手段103の出力である目標とレーダとの初期相対速度の和v0TR(i)、相対加速度の和aTR(i)を用いて、次の式(35)に従って、レンジ補正量Rcor(i,nL)を算出する。
【0101】
【数24】
【0102】
また、レンジ補正手段205は、次の式(36)に従い、レンジ補正量Rcor(i,nL)をレンジビン単位で表すレンジ補正量Rcor_bin(i,nL)に変換する。
【0103】
【数25】
【0104】
ここで、Δrはチャープパルス圧縮後のサンプリング間隔、floor(Y)は、変数Yを越えない最大の整数を示す。
【0105】
そして、レンジ補正手段205は、算出されたレンジ補正量Rcor(i,nL)を用いて、次の式(37)に従って、チャープパルス圧縮することにより生成された信号RV・Ex(i,nL,l)のレンジ補正を行い、レンジ補正された信号RV・Ex_cor(i,nL,l)を出力する。このような処理を行うことによって、図8に示すように、チャープパルス圧縮により生成され、レンジ補正された信号の振幅が最大を示す目標までの距離を同一にすることができる。
【0106】
【数26】
【0107】
移動目標がパルス間で加速度を有している場合、パルス間でコヒーレントにならないため、目標検出性能が劣化する可能性がある。そのため、加速度補償手段206は、レンジ補正された信号に対して、加速度補償を行い、加速度を有する移動目標に対する目標検出性能の向上を図る。
【0108】
加速度補償手段206は、初期相対速度・相対加速度算出手段103の出力である目標とレーダとの初期相対速度v’0R(i)、相対加速度a’R(i)から求められた目標とレーダとの相対加速度の和aTR(i)を用いて、次の式(38)に従い、レンジ補正手段205の出力であるレンジ補正された信号RV・Ex_cor(i,nL,l)に対して加速度補償を行い、加速度補償された信号R’V・Ex_cor(i,nL,l)を出力する。
【0109】
【数27】
【0110】
このように、実施の形態2によれば、第2の受信信号に対しチャープパルス圧縮した後、レンジ補正、加速度補償をすることにより、目標との相対距離を考慮せず補償することができ、遠距離移動目標に対する目標検出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0111】
また、実施の形態2の相関手段202は、受信機6Aとレンジ補正手段205の間に配置されていたが、レンジ補正手段205と加速度補償手段206の間に配置した場合でも同様の効果を得ることができる。
【0112】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0113】
さらに、3次元ジオメトリーにおいても同様の効果を得ることが可能になる。
【0114】
実施の形態3.
この発明の実施の形態3に係るマルチスタティックレーダ装置について図9から図15までを参照しながら説明する。この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0115】
すなわち、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0116】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0117】
図9は、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0118】
図9において、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Dと、表示器8とが設けられている。
【0119】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0120】
図10は、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成を示す図である。
【0121】
図10において、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯3及び♯4は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Eとが設けられている。
【0122】
なお、第4の受信手段は、レーダ♯3の空中線1Dと、受信機4Cとから構成される。また、第5の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。第6の受信手段は、レーダ♯4の空中線1Dと、受信機4Cとから構成される。また、第7の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。
【0123】
図11は、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【0124】
図11に示すように、4つのレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4は、2次元ジオメトリーで分離配置されている。なお、各レーダは、複数の空中線を有しているものもあるが、図11では1つの空中線で代表して示している。
【0125】
この発明の実施の形態3に係るマルチスタティックレーダ装置は、上記の実施の形態1に係るマルチスタティックレーダ装置と比較して、レーダ♯2の信号処理器7D、レーダ♯3、レーダ♯4が異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態3の信号処理器7Dは、図9に示すように、実施の形態1の信号処理器7Bと比較して、測位手段207と速度算出手段208を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0126】
また、実施の形態3のレーダ♯3とレーダ♯4は、図10に示すように、実施の形態1のレーダ♯2と比較して、送信機5と送受切替器3Bがなく、信号処理器7Bに代えて信号処理器7Eを有することが異なっている。
【0127】
信号処理器7Eは、実施の形態1の信号処理器7Bの測距手段204の代わりに測距手段204Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0128】
また、測位手段207と速度算出手段208は、レーダ♯1、♯3、♯4や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0129】
つぎに、この実施の形態3に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0130】
図12は、この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4の信号処理器の処理動作を示す図である。図13は、この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対距離を説明するための図である。図14は、この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対位置ベクトルを説明するための図である。図15は、この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対速度ベクトルを説明するための図である。
【0131】
測距手段204Bは、積分手段203から入力される周波数スペクトルRf(i,kh,l)を用いて目標との相対距離Rpeak(i)を次の式(39)に従って算出する。ここで、真値と区別し、式(39)により算出された目標との相対距離であることを表すために’を付している。
【0132】
【数28】
【0133】
測位手段207に、測距手段204と測距手段204Bから入力される目標との相対距離Rpeak(i)と、目標の初期位置Ptgt=(xtgt,ytgt)から、次の式(40)の測位方程式が成り立つ。
【0134】
【数29】
【0135】
また、式(40)の両辺を二乗し展開すると、次の式(41)のように表される。
【0136】
【数30】
【0137】
測位方程式を解くために、式(41)中のxtgt2,ytgt2の項を消去すると次の式(42)のように表される。
【0138】
【数31】
【0139】
また、式(42)を行列として、次の式(43)のように表す。また、式(43)は、式(44)により表される。ただし、AP,Ptgt,BPは式(45)により表される。
【0140】
【数32】
【0141】
測位手段207は、式(44)を次の式(46)に従い解くことによって、目標の初期位置P’tgtを算出する。ここで、真値と区別し、式(46)により算出された目標との初期位置であることを表すために’を付している。
【0142】
【数33】
【0143】
速度算出手段208は、測位手段207の出力である目標の初期位置P’tgt、初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)、既知であるレーダの初期位置Piと速度viから、目標の速度vtgt=(vxtgt,vytgt)を算出する。
【0144】
測位手段207の出力である目標の初期位置P’tgt、既知であるレーダの初期位置Piと速度vi、目標の速度vtgtから、次の式(47)が成り立つ。ここで、式(48)で表されるvtgt,iは目標とレーダとの相対速度ベクトル、式(49)で表されるP’tgt,iは目標とレーダとの相対位置ベクトル、θiは目標とレーダとの相対速度ベクトルと目標とレーダとの相対位置ベクトルのなす角、|W|はベクトルWの絶対値を表す。
【0145】
【数34】
【0146】
初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)は、|vtgt,i|cosθi≒(ほぼ等しい)v’0R(i)の関係にあり、式(47)は式(48)と式(49)を用いて、次の式(50)のように表すことができる。
【0147】
【数35】
【0148】
さらに、式(50)は行列式として次の式(51)により表される。また、式(51)は、式(52)により表される。ただし、APv、vtgtT、BPvは式(53)により表される。
【0149】
【数36】
【0150】
速度算出手段208は、式(52)を次の式(54)に従い解き、目標の速度v’tgtを算出する。ここで、ZTは行列Zの転置、Z−1は行列Zの逆行列を表す。また、真値と区別し、式(54)により算出された目標の速度であることを表すために’を付している。また、速度算出手段208の説明において、分離配置された4つのレーダの初期位置Piと速度viを用いたが、2次元ジオメトリーにおいて分離配置された2つ以上のレーダの初期位置Piと速度viを用いて、2次元ジオメトリーにおける目標の速度を算出することが可能である。
【0151】
【数37】
【0152】
このように、実施の形態3によれば、実施の形態1にレーダ♯3とレーダ♯4を追加したことにより、精度の良い3つの測距結果から目標の測位をすることが可能になり、さらに、測位結果を用いて目標の速度を算出することが可能になり、測位性能と速度算出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0153】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0154】
実施の形態4.
この発明の実施の形態4に係るマルチスタティックレーダ装置について図16から図18までを参照しながら説明する。この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0155】
すなわち、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0156】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0157】
図16は、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0158】
図16において、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Fと、表示器8とが設けられている。
【0159】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0160】
図17は、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成を示す図である。
【0161】
図17において、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯3及び♯4は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Gとが設けられている。
【0162】
なお、第4の受信手段は、レーダ♯3の空中線1Dと、受信機4Cとから構成される。また、第5の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。第6の受信手段は、レーダ♯4の空中線1Dと、受信機4Cとから構成される。また、第7の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。
【0163】
また、レーダ♯1〜レーダ♯4は、上記の実施の形態3の図11と同様に、2次元ジオメトリーで分離配置されている。
【0164】
この発明の実施の形態4に係るマルチスタティックレーダ装置は、上記の実施の形態2に係るマルチスタティックレーダ装置と比較して、信号処理器7F、7Gが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態4の信号処理器7Fは、図16に示すように、実施の形態2の信号処理器7Cと比較して、測位手段207と速度算出手段208を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0165】
また、実施の形態4の信号処理器7Gは、図17に示すように、実施の形態2の信号処理器7Cと比較して、送信機5と送受切替器3Bがなく、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0166】
また、測位手段207と速度算出手段208は、レーダ♯1、♯3、♯4や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0167】
つぎに、この実施の形態4に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0168】
図18は、この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4の信号処理器の処理動作を示す図である。
【0169】
測位手段207は、3つのレーダの積分手段203の出力である周波数スペクトルRf(i,kh,l)の最大振幅を示す距離Rpeak(i)を用いて、式(46)に従い、目標の初期位置P’tgtを算出する。
【0170】
速度算出手段208は、測位手段207の出力である目標の初期位置P’tgt、初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)、既知であるレーダの初期位置Piと速度viから式(52)を式(54)に従い、目標の速度v’tgtを算出する。
【0171】
このように、実施の形態4によれば、第2の受信ビデオ信号に対しチャープパルス圧縮した後、レンジ補正、加速度補償をすることにより、目標との相対距離を考慮せず補償することができ、遠距離移動目標に対する目標検出性能を改善し、さらに3つのレーダの測距結果を用いた遠距離移動目標に対する測位性能と速度算出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0172】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0173】
実施の形態5.
この発明の実施の形態5に係るマルチスタティックレーダ装置について図19を参照しながら説明する。この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0174】
すなわち、この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0175】
図19は、この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0176】
図19において、この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Hと、表示器8とが設けられている。なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0177】
この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成は、上記の実施の形態3の図10と同様である。
【0178】
すなわち、この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯3及び♯4は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Eとが設けられている。
【0179】
また、レーダ♯1〜レーダ♯4は、上記の実施の形態3の図11と同様に、2次元ジオメトリーで分離配置されている。
【0180】
この発明の実施の形態5に係るマルチスタティックレーダ装置は、上記の実施の形態3に係るマルチスタティックレーダ装置と比較して、信号処理器7Hが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態5の信号処理器7Hは、図19に示すように、実施の形態3の信号処理器7Dの測位手段207に代えて、測位手段207Bを備えることが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0181】
また、測位手段207Bと速度算出手段208は、レーダ♯1、♯3、♯4や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0182】
つぎに、この実施の形態5に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0183】
測位手段207Bは、測距手段204から入力される目標との相対距離Rpeak(i)、未知である目標の初期位置Ptgt=(xtgt,ytgt)と、既知であるレーダの初期位置Pi=(xi,yi)を用いて、G(i,xtgt,ytgt)を次の式(55)のように定義する。
【0184】
【数38】
【0185】
また、G(i,xtgt,ytgt)に対して、xtgt,ytgtについて偏微分して次の式(56)により近似式が得られる。
【0186】
【数39】
【0187】
ここで、ハットxtgt,ハットytgtはxtgt,ytgtの近似値を表す。また、式(56)を行列として、次の式(57)のように表す。また、式(57)は、式(58)により表される。ただし、チルダAP,δチルダPtgt,チルダBPは式(59)により表される。
【0188】
【数40】
【0189】
ここで、δチルダPtgtは真の目標の初期位置と目標の初期位置の近似値の差であり、逐次近似法による補正量である。式(58)を次の式(60)により解くことによって、逐次近似法による補正量δチルダPtgtを算出することが可能になる。
【0190】
【数41】
【0191】
測距手段204あるいは測距手段204Bに誤差が含まれている場合、測位手段207が算出する目標の初期位置には誤差が含まれる。測位手段207Bは、測位精度を向上させるために、式(60)と次の式(61)により目標の初期位置の近似値ハットxtgt,ハットytgtを繰り返し更新し、逐次近似法による補正量δPtgtが十分小さくなるまで行い、2次元ジオメトリーにおける目標の初期位置チルダP’tgtを算出する。また、測位手段207Bは、目標の初期位置の近似値の初期設定として、式(46)により算出される目標との初期位置の位置P’tgtを用いる。ここで、ハットx’tgt,ハットy’tgtは更新された目標の初期位置の近似値、チルダP’tgt=(ハットx’tgt,ハットy’tgt)は式(60)と次の式(61)により最終的に算出した目標の初期位置を表す。また、真値と区別し、チルダP’tgt=(ハットx’tgt,ハットy’tgt)は式(60)と次の式(61)により最終的に算出した目標の初期位置を表すために’を付している。また、レーダ♯1あるいはレーダ♯2の送信方向等をもとに、ある程度目標の初期位置を推定できる場合は、レーダ♯1あるいはレーダ♯2の送信方向の位置を目標の初期位置の近似値の初期設定にすることにより、レーダ♯4を使用せず、測位手段207Bによる目標の初期位置を算出することが可能である。
【0192】
【数42】
【0193】
このように、実施の形態5によれば、実施の形態3の信号処理器7Dの測位手段207に代えて、測位手段207Bを備えることにより、精度の良い2次元ジオメトリーにおける目標の位置を算出することが可能になり、測位性能を改善したマルチスタティックレーダ装置を提供することができる。
【0194】
また、実施の形態4の信号処理器7Fの測位手段207に代えて、測位手段207Bを備えることにより、同様な効果を得るマルチスタティックレーダ装置を提供することができる。
【0195】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0196】
実施の形態6.
この発明の実施の形態6に係るマルチスタティックレーダ装置について図20から図24までを参照しながら説明する。この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0197】
すなわち、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0198】
なお、第1の送信手段は、空中線1Aと、送信機2と、送受切替器3Aとから構成される。また、第1の受信手段は、空中線1Aと、送受切替器3Aと、受信機4Aとから構成される。
【0199】
図20は、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0200】
図20において、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Iと、表示器8とが設けられている。
【0201】
なお、第2の受信手段は、空中線1Bと、受信機4Bとから構成される。また、第2の送信手段は、空中線1Cと、送信機5と、送受切替器3Bとから構成される。さらに、第3の受信手段は、空中線1Cと、送受切替器3Bと、受信機6Aとから構成される。
【0202】
この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯3、レーダ♯4及びレーダ♯5の構成は、上記の実施の形態3の図10と同様である。
【0203】
すなわち、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯3、♯4及び♯5は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Eとが設けられている。
【0204】
なお、第4の受信手段は、レーダ♯3の空中線1Dと、受信機4Cとから構成される。また、第5の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。第6の受信手段は、レーダ♯4の空中線1Dと、受信機4Cとから構成される。また、第7の受信手段は、レーダ♯3の空中線1Eと、受信機6Bととから構成される。第8の受信手段は、レーダ♯5の空中線1Dと、受信機4Cとから構成される。また、第9の受信手段は、レーダ♯5の空中線1Eと、受信機6Bととから構成される。
【0205】
図21は、この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【0206】
図21において、この実施の形態6は、3次元ジオメトリーを想定しており、5つのレーダは3次元ジオメトリーで分離配置されている。
【0207】
この発明の実施の形態6に係るマルチスタティックレーダ装置は、上記の実施の形態3に係るマルチスタティックレーダ装置と比較して、レーダ♯2の信号処理器7Iが異なり、また、レーダ♯5が加えられており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態6の信号処理器7Iは、図20に示すように、実施の形態3の信号処理器7Dと比較して、測位手段207と速度算出手段208に代えて、測位手段207Cと速度算出手段208Bを備えることが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0208】
また、実施の形態6のレーダ♯5は、実施の形態3のレーダ♯3とレーダ♯4と同様であるので、説明を省略する。
【0209】
また、測位手段207Bと速度算出手段208は、レーダ♯1、♯3、♯4、♯5や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0210】
つぎに、この実施の形態6に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0211】
図22は、この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対距離を説明するための図である。図23は、この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対位置ベクトルを説明するための図である。図24は、この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対速度ベクトルを説明するための図である。
【0212】
測位手段207Cに、測距手段204と測距手段204Bから入力される目標との相対距離Rpeak(i)と、目標の初期位置P3,tgt=(xtgt,ytgt,ztgt)から、次の式(62)の測位方程式が成り立つ。また、式(62)の両辺を二乗し展開すると、式(63)のように表される。
【0213】
【数43】
【0214】
測位方程式を解くために、式(63)中のxtgt2,ytgt2,ztgt2の項を消去すると次の式(64)のように表される。
【0215】
【数44】
【0216】
また、式(64)を行列として、次の式(65)のように表す。また、式(65)は、式(66)により表される。ただし、A3,P,P3,tgt,B3,Pは式(67)により表される。
【0217】
【数45】
【0218】
測位手段207Cは、式(66)を次の式(68)に従い、目標の初期位置P’3,tgtを算出する。ここで、真値と区別し、式(68)により算出された目標との初期位置であることを表すために’を付している。
【0219】
【数46】
【0220】
速度算出手段208Bは、測位手段207Cの出力である目標の初期位置P’3,tgt、初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)、既知であるレーダの初期位置P3,iと速度v3,i=(vxi,vyi,vzi)から、目標の速度v3,tgt=(vxtgt,vytgt,vztgt)を算出する。測位手段207Cの出力である目標の初期位置P’3,tgt、既知であるレーダの初期位置P3,iと速度v3,i、目標の速度v3,tgtから、次の式(69)が成り立つ。ここで、式(70)で表されるv3,tgt,iは目標とレーダとの相対速度ベクトル、式(71)で表されるP’3,tgt,iは目標とレーダとの相対位置ベクトル、θ3,iは目標とレーダとの相対速度ベクトルと目標とレーダとの相対位置ベクトルのなす角、|W|はベクトルWの絶対値を表す。
【0221】
【数47】
【0222】
初期相対速度・相対加速度算出手段103の出力である目標との初期相対速度v’0R(i)は|v3,tgt,i|cosθ3,i≒(ほぼ等しい)v’0R(i)の関係にあり、式(69)は式(70)と式(71)を用いて次の式(72)のように表すことができる。
【0223】
【数48】
【0224】
さらに、式(72)は行列式として、次の式(73)により表される。また、式(73)は、式(74)により表される。ただし、A3,Pv、v3,tgtT、B3,Pvは式(75)により表される。
【0225】
【数49】
【0226】
速度算出手段208Bは、式(74)を次の式(76)に従い解き、3次元ジオメトリーにおける目標の速度v’3,tgtを算出する。ここで、ZTは行列Zの転置、Z−1は行列Zの逆行列を表す。また、真値と区別し、式(76)により算出された目標の速度であることを表すために’を付している。また、速度算出手段208Bの説明において、分離配置された5つのレーダの初期位置P3,iと速度v3,iを用いたが、3次元ジオメトリーにおいて分離配置された3つ以上のレーダの初期位置P3,iと速度v3,iを用いて、3次元ジオメトリーにおける目標の速度を算出することが可能である。
【0227】
【数50】
【0228】
このように、実施の形態6によれば、実施の形態3の信号処理器7Dの測位手段207と速度算出手段208に代えて、測位手段207Cと速度算出手段208Bを備えることにより、4つの測距結果から3次元ジオメトリーにおける目標の測位をすることが可能になり、さらに、測位結果を用いて3次元ジオメトリーにおける目標の速度を算出することが可能になり、3次元ジオメトリーにおける測位性能と速度算出性能を改善したマルチスタティックレーダ装置を提供することができる。
【0229】
また、実施の形態4の信号処理器7Dの測位手段207と速度算出手段208に代えて、測位手段207Cと速度算出手段208Bを備えることにより、同様な効果を得るマルチスタティックレーダ装置を提供することができる。
【0230】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【0231】
実施の形態7.
この発明の実施の形態7に係るマルチスタティックレーダ装置について図25を参照しながら説明する。この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯1の構成は、上記の実施の形態1の図1と同様である。
【0232】
すなわち、この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯1は、空中線1Aと、送信機2と、送受切替器3Aと、受信機4Aと、信号処理器7Aとが設けられている。
【0233】
図25は、この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【0234】
図25において、この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯2は、空中線1Bと、受信機4Bと、空中線1Cと、送信機5と、送受切替器3Bと、受信機6Aと、信号処理器7Jと、表示器8とが設けられている。
【0235】
この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯3、レーダ♯4及びレーダ♯5の構成は、上記の実施の形態3の図10と同様である。
【0236】
すなわち、この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯3、♯4及び♯5は、空中線1Dと、受信機4Cと、空中線1Eと、受信機6Bと、信号処理器7Eとが設けられている。
【0237】
また、5つのレーダは、上記の実施の形態6の図21と同様に、3次元ジオメトリーで分離配置されている。
【0238】
この発明の実施の形態7に係るマルチスタティックレーダ装置は、上記の実施の形態6に係るマルチスタティックレーダ装置と比較して、信号処理器7Jが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。そして、実施の形態7の信号処理器7Jは、図25に示すように、実施の形態6の信号処理器7Iの測位手段207Cに代えて、測位手段207Dを備えることが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して詳細な説明は省略する。
【0239】
また、測位手段207Dと速度算出手段208Bは、レーダ♯1、♯3、♯4、♯5や、ネットワークを介して処理結果等の情報が共有されている信号処理器に配置することが可能である。
【0240】
つぎに、この実施の形態7に係るマルチスタティックレーダ装置の動作について図面を参照しながら説明する。
【0241】
測位手段207Dは、測距手段204と測距手段204Bから入力される目標との相対距離Rpeak(i)、目標の初期位置P3,tgt=(xtgt,ytgt,ztgt)と、既知であるレーダの初期位置P3,i=(xi,yi,zi)を用いて、G3(i,xtgt,ytgt,ztgt)を次の式(77)のように定義する。
【0242】
【数51】
【0243】
また、G3(i,xtgt,ytgt,ztgt)に対して、xtgt,ytgt,ztgtについて偏微分して次の式(78)により近似式が得られる。
【0244】
【数52】
【0245】
ここで、ハットxtgt,ハットytgt,ハットztgtはxtgt,ytgt,ztgtの近似値を表す。
【0246】
また、式(78)を行列として、次の式(79)のように表す。また、式(79)は、式(80)により表される。ただし、チルダA3,P,δチルダP3,tgt,チルダB3,Pは式(81)により表される。
【0247】
【数53】
【0248】
ここで、δチルダP3,tgtは真の目標の初期位置と目標の初期位置の近似値の差であり、逐次近似法による補正量である。式(80)を次の式(82)により解くことによって、逐次近似法による補正量δチルダP3,tgtを算出することが可能になる。
【0249】
【数54】
【0250】
測距手段204あるいは測距手段204Bに誤差が含まれている場合、測位手段207Cが算出する目標の初期位置には誤差が含まれる。測位手段207Dは、測位精度を向上させるために、式(82)と次の式(83)により目標の初期位置の近似値ハットxtgt,ハットytgt,ハットztgtを繰り返し更新し、逐次近似法による補正量δチルダP3,tgtが十分小さくなるまで行い、目標の初期位置P’3,tgtを算出する。また、測位手段207Dは、目標の初期位置の近似値の初期設定として、式(68)により算出される目標との初期位置の位置P’3,tgtを用いる。ここで、ハットx’tgt,ハットy’tgt,ハットz’tgtは更新された目標の初期位置の近似値、チルダP’tgt=(ハットx’tgt,ハットy’tgt,ハットz’tgt)は式(82)と次の式(83)により最終的に算出した目標の初期位置を表す。また、真値と区別し、チルダP’tgt=(ハットx’tgt,ハットy’tgt,ハットz’tgt)は式(82)と次の式(83)により最終的に算出した目標の初期位置を表すために’を付している。また、レーダ♯1あるいはレーダ♯2の送信方向等をもとに、ある程度目標の初期位置を推定できる場合は、レーダ♯1あるいはレーダ♯2の送信方向の位置を目標の初期位置の近似値の初期設定にすることにより、レーダ♯5を使用せず、測位手段207Dによる目標の初期位置を算出することが可能である。
【0251】
【数55】
【0252】
このように、実施の形態7によれば、実施の形態6の信号処理器7Iの測位手段207Cに代えて、測位手段207Dを備えることにより、精度の良い3次元ジオメトリーにおける目標の位置を算出することが可能になり、測位性能を改善したマルチスタティックレーダ装置を提供することができる。
【0253】
また、実施の形態4の信号処理器7Fの測位手段207に代えて、測位手段207Dを備え、かつ、レーダ♯5を加えることにより、同様な効果を得るマルチスタティックレーダ装置を提供することができる。
【0254】
また、第1の反射RF信号と第2の反射RF信号を時分割に受信することにより、空中線や送信機、受信機の数を削減することが可能であり、かつ同様な効果を得ることが可能になる。
【図面の簡単な説明】
【0255】
【図1】この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1の構成を示す図である。
【図2】この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図3】この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【図4】この発明の実施の形態1に係るマルチスタティックレーダ装置のレーダ♯1とレーダ♯2の信号処理器の処理動作を示す図である。
【図5】この発明の実施の形態1に係るマルチスタティックレーダ装置のチャープパルス圧縮の処理動作を示す図である。
【図6】この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図7】この発明の実施の形態2に係るマルチスタティックレーダ装置のレーダ♯1とレーダ♯2の信号処理器の処理動作を示す図である。
【図8】この発明の実施の形態2に係るマルチスタティックレーダ装置のレンジ補正の処理動作を示す図である。
【図9】この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図10】この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成を示す図である。
【図11】この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【図12】この発明の実施の形態3に係るマルチスタティックレーダ装置のレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4の信号処理器の処理動作を示す図である。
【図13】この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対距離を説明するための図である。
【図14】この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対位置ベクトルを説明するための図である。
【図15】この発明の実施の形態3に係るマルチスタティックレーダ装置の目標と各レーダとの相対速度ベクトルを説明するための図である。
【図16】この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図17】この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯3及びレーダ♯4の構成を示す図である。
【図18】この発明の実施の形態4に係るマルチスタティックレーダ装置のレーダ♯1、レーダ♯2、レーダ♯3及びレーダ♯4の信号処理器の処理動作を示す図である。
【図19】この発明の実施の形態5に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図20】この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図21】この発明の実施の形態6に係るマルチスタティックレーダ装置のレーダの配置を示す図である。
【図22】この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対距離を説明するための図である。
【図23】この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対位置ベクトルを説明するための図である。
【図24】この発明の実施の形態6に係るマルチスタティックレーダ装置の3次元ジオメトリーにおける目標と各レーダとの相対速度ベクトルを説明するための図である。
【図25】この発明の実施の形態7に係るマルチスタティックレーダ装置のレーダ♯2の構成を示す図である。
【図26】従来のマルチスタティックレーダ装置の送信局、目標及び受信局の配置を示す図である。
【図27】従来のマルチスタティックレーダ装置の信号処理系統を示す図である。
【符号の説明】
【0256】
1A、1B、1C、1D、1E 空中線、2 送信機、3A、3B 送受切替器、4A、4B、4C 受信機、5 送信機、6A、6B 受信機、7A、7B、7C、7D、7E、7F、7G、7H、7I、7J 信号処理器、8 表示器、101 ドップラー周波数算出手段、102 相対速度算出手段、103 初期相対速度・相対加速度算出手段、201 速度補償手段、202 相関手段、203 積分手段、204 測距手段、204B 測距手段、204 測距手段、205 レンジ補正手段、206 加速度補償手段、207 測位手段、207B、207C、207D 測位手段、208 速度算出手段、208B 速度算出手段。
【特許請求の範囲】
【請求項1】
第1のレーダ及び第2のレーダが2次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記相対速度算出手段から得られる目標と第1及び第2のレーダとの相対速度を用いて、前記第3の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う速度補償手段と、
前記速度補償手段から得られる速度補償された第2の受信信号を相関演算する相関手段と、
前記相関手段により相関演算された第2の受信信号を加算する積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する測距手段とを備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項2】
前記第2のレーダは、
前記速度補償手段から得られる速度補償された第2の受信信号を相関演算する相関手段の代わりに、
前記積分手段から得られる積分することにより生成された信号を相関演算し、相関演算された第2の受信信号を前記測距手段に出力する相関手段を備える
ことを特徴とする請求項1記載のマルチスタティックレーダ装置。
【請求項3】
第1のレーダ及び第2のレーダが2次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記第3の受信手段から得られる第2の受信信号を相関演算する相関手段と、
前記相関手段から得られる第2の受信信号のレンジを補正すると同一になるように、前記目標と第1及び第2のレーダとの相対速度を用いてレンジ補正量を算出し、前記レンジ補正量を用いて前記第2の受信信号のレンジを補正するレンジ補正手段と、
レンジ補正された信号に対して加速度補償を行う加速度補償手段と、
加速度補償された第2の受信信号を加算する積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する測距手段とを備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項4】
前記第2のレーダは、
前記第3の受信手段から得られる第2の受信信号を相関演算する相関手段の代わりに、
前記レンジ補正手段から得られるレンジ補正された第2の受信信号を相関演算し、相関演算された第2の受信信号を前記加速度補償手段に出力する相関手段を備える
ことを特徴とする請求項3記載のマルチスタティックレーダ装置。
【請求項5】
第1のレーダ、第2のレーダ、第3のレーダ及び第4のレーダが2次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する第1の相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記第1の相対速度算出手段から得られる目標と第1及び第2のレーダとの相対速度を用いて、前記第3の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第1の速度補償手段と、
前記第1の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第1の相関手段と、
前記第1の相関手段により相関演算された第2の受信信号を加算する第1の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第1の測距手段とを備え、
前記第3のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第4の受信手段と、
前記第4の受信手段から得られる第1の受信信号からドップラー周波数を算出する第3のドップラー周波数算出手段と、
前記第3のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第3のレーダとの相対速度を算出する第2の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第5の受信手段と、
前記第2の相対速度算出手段から得られる目標と第3のレーダとの相対速度を用いて、前記第5の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第2の速度補償手段と、
前記第2の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第2の相関手段と、
前記第2の相関手段により相関演算された第2の受信信号を加算する第2の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第2の測距手段とを備え、
前記第4のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第6の受信手段と、
前記第6の受信手段から得られる第1の受信信号からドップラー周波数を算出する第4のドップラー周波数算出手段と、
前記第4のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第4のレーダとの相対速度を算出する第3の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第7の受信手段と、
前記第3の相対速度算出手段から得られる目標と第4のレーダとの相対速度を用いて、前記第7の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第3の速度補償手段と、
前記第3の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第3の相関手段と、
前記第3の相関手段により相関演算された第2の受信信号を加算する第3の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第3の測距手段とを備え、
前記第1のレーダ、第2のレーダ、第3のレーダ又は第4のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段及び前記第4のレーダの第3の測距手段から得られる測距結果から求められる測位方程式に基づいて2次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項6】
第1のレーダ、第2のレーダ、第3のレーダ及び第4のレーダが2次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する第1の相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記第3の受信手段から得られる第2の受信信号を相関演算する第1の相関手段と、
前記第1の相関手段から得られる第2の受信信号のレンジを補正すると同一になるように、前記目標と第1及び第2のレーダとの相対速度を用いてレンジ補正量を算出し、前記レンジ補正量を用いて前記第2の受信信号のレンジを補正する第1のレンジ補正手段と、
レンジ補正された信号に対して加速度補償を行う第1の加速度補償手段と、
加速度補償された第2の受信信号を加算する第1の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第1の測距手段とを備え、
前記第3のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第4の受信手段と、
前記第4の受信手段から得られる第1の受信信号からドップラー周波数を算出する第3のドップラー周波数算出手段と、
前記第3のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第3のレーダとの相対速度を算出する第2の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第5の受信手段と、
前記第5の受信手段から得られる第2の受信信号を相関演算する第2の相関手段と、
前記第2の相関手段から得られる第2の受信信号のレンジを補正すると同一になるように、前記目標と第3のレーダとの相対速度を用いてレンジ補正量を算出し、前記レンジ補正量を用いて前記第2の受信信号のレンジを補正する第2のレンジ補正手段と、
レンジ補正された信号に対して加速度補償を行う第2の加速度補償手段と、
加速度補償された第2の受信信号を加算する第2の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第2の測距手段とを備え、
前記第4のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第6の受信手段と、
前記第6の受信手段から得られる第1の受信信号からドップラー周波数を算出する第4のドップラー周波数算出手段と、
前記第4のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第4のレーダとの相対速度を算出する第3の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第7の受信手段と、
前記第7の受信手段から得られる第2の受信信号を相関演算する第3の相関手段と、
前記第3の相関手段から得られる第2の受信信号のレンジを補正すると同一になるように、前記目標と第4のレーダとの相対速度を用いてレンジ補正量を算出し、前記レンジ補正量を用いて前記第2の受信信号のレンジを補正する第3のレンジ補正手段と、
レンジ補正された信号に対して加速度補償を行う第3の加速度補償手段と、
加速度補償された第2の受信信号を加算する第3の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第3の測距手段とを備え、
前記第1のレーダ、第2のレーダ、第3のレーダ又は第4のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段及び前記第4のレーダの第3の測距手段から得られる測距結果から求められる測位方程式に基づいて2次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項7】
前記第1のレーダ、第2のレーダ、第3のレーダ又は第4のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段及び前記第4のレーダの第3の測距手段から得られる測距結果から求められる測位方程式に基づいて2次元ジオメトリーにおける目標の位置を算出する測位手段の代わりに、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段及び前記第4のレーダの第3の測距手段から得られる測距結果から求められる測位方程式に基づいて逐次近似法によって2次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とする請求項5記載のマルチスタティックレーダ装置。
【請求項8】
前記第1のレーダ、第2のレーダ、第3のレーダ又は第4のレーダは、
前記測位手段から得られる測位結果から2次元ジオメトリーにおける目標の速度を算出する速度算出手段をさらに備える
ことを特徴とする請求項5、6又は7記載のマルチスタティックレーダ装置。
【請求項9】
第1のレーダ、第2のレーダ、第3のレーダ、第4のレーダ及び第5のレーダが3次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する第1の相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記第1の相対速度算出手段から得られる目標と第1及び第2のレーダとの相対速度を用いて、前記第3の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第1の速度補償手段と、
前記第1の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第1の相関手段と、
前記第1の相関手段により相関演算された第2の受信信号を加算する第1の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第1の測距手段とを備え、
前記第3のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第4の受信手段と、
前記第4の受信手段から得られる第1の受信信号からドップラー周波数を算出する第3のドップラー周波数算出手段と、
前記第3のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第3のレーダとの相対速度を算出する第2の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第5の受信手段と、
前記第2の相対速度算出手段から得られる目標と第3のレーダとの相対速度を用いて、前記第5の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第2の速度補償手段と、
前記第2の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第2の相関手段と、
前記第2の相関手段により相関演算された第2の受信信号を加算する第2の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第2の測距手段とを備え、
前記第4のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第6の受信手段と、
前記第6の受信手段から得られる第1の受信信号からドップラー周波数を算出する第4のドップラー周波数算出手段と、
前記第4のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第4のレーダとの相対速度を算出する第3の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第7の受信手段と、
前記第3の相対速度算出手段から得られる目標と第4のレーダとの相対速度を用いて、前記第7の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第3の速度補償手段と、
前記第3の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第3の相関手段と、
前記第3の相関手段により相関演算された第2の受信信号を加算する第3の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第3の測距手段とを備え、
前記第5のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第8の受信手段と、
前記第8の受信手段から得られる第1の受信信号からドップラー周波数を算出する第5のドップラー周波数算出手段と、
前記第5のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第5のレーダとの相対速度を算出する第4の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第9の受信手段と、
前記第4の相対速度算出手段から得られる目標と第5のレーダとの相対速度を用いて、前記第9の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第4の速度補償手段と、
前記第4の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第4の相関手段と、
前記第4の相関手段により相関演算された第2の受信信号を加算する第4の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第4の測距手段とを備え、
前記第1のレーダ、第2のレーダ、第3のレーダ、第4のレーダ又は第5のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段、前記第4のレーダの第3の測距手段及び前記第5のレーダの第4の測距手段から得られる測距結果から求められる測位方程式に基づいて3次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項10】
前記第1のレーダ、第2のレーダ、第3のレーダ、第4のレーダ又は第5のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段、前記第4のレーダの第3の測距手段及び前記第5のレーダの第4の測距手段から得られる測距結果から求められる測位方程式に基づいて3次元ジオメトリーにおける目標の位置を算出する測位手段の代わりに、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段、前記第4のレーダの第3の測距手段及び前記第5のレーダの第4の測距手段から得られる測距結果から求められる測位方程式に基づいて逐次近似法によって3次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とする請求項9記載のマルチスタティックレーダ装置。
【請求項11】
前記第1のレーダ、第2のレーダ、第3のレーダ、第4のレーダ又は第5のレーダは、
前記測位手段から得られる測位結果から3次元ジオメトリーにおける目標の速度を算出する速度算出手段をさらに備える
ことを特徴とする請求項9又は10記載のマルチスタティックレーダ装置。
【請求項1】
第1のレーダ及び第2のレーダが2次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記相対速度算出手段から得られる目標と第1及び第2のレーダとの相対速度を用いて、前記第3の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う速度補償手段と、
前記速度補償手段から得られる速度補償された第2の受信信号を相関演算する相関手段と、
前記相関手段により相関演算された第2の受信信号を加算する積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する測距手段とを備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項2】
前記第2のレーダは、
前記速度補償手段から得られる速度補償された第2の受信信号を相関演算する相関手段の代わりに、
前記積分手段から得られる積分することにより生成された信号を相関演算し、相関演算された第2の受信信号を前記測距手段に出力する相関手段を備える
ことを特徴とする請求項1記載のマルチスタティックレーダ装置。
【請求項3】
第1のレーダ及び第2のレーダが2次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記第3の受信手段から得られる第2の受信信号を相関演算する相関手段と、
前記相関手段から得られる第2の受信信号のレンジを補正すると同一になるように、前記目標と第1及び第2のレーダとの相対速度を用いてレンジ補正量を算出し、前記レンジ補正量を用いて前記第2の受信信号のレンジを補正するレンジ補正手段と、
レンジ補正された信号に対して加速度補償を行う加速度補償手段と、
加速度補償された第2の受信信号を加算する積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する測距手段とを備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項4】
前記第2のレーダは、
前記第3の受信手段から得られる第2の受信信号を相関演算する相関手段の代わりに、
前記レンジ補正手段から得られるレンジ補正された第2の受信信号を相関演算し、相関演算された第2の受信信号を前記加速度補償手段に出力する相関手段を備える
ことを特徴とする請求項3記載のマルチスタティックレーダ装置。
【請求項5】
第1のレーダ、第2のレーダ、第3のレーダ及び第4のレーダが2次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する第1の相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記第1の相対速度算出手段から得られる目標と第1及び第2のレーダとの相対速度を用いて、前記第3の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第1の速度補償手段と、
前記第1の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第1の相関手段と、
前記第1の相関手段により相関演算された第2の受信信号を加算する第1の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第1の測距手段とを備え、
前記第3のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第4の受信手段と、
前記第4の受信手段から得られる第1の受信信号からドップラー周波数を算出する第3のドップラー周波数算出手段と、
前記第3のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第3のレーダとの相対速度を算出する第2の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第5の受信手段と、
前記第2の相対速度算出手段から得られる目標と第3のレーダとの相対速度を用いて、前記第5の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第2の速度補償手段と、
前記第2の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第2の相関手段と、
前記第2の相関手段により相関演算された第2の受信信号を加算する第2の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第2の測距手段とを備え、
前記第4のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第6の受信手段と、
前記第6の受信手段から得られる第1の受信信号からドップラー周波数を算出する第4のドップラー周波数算出手段と、
前記第4のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第4のレーダとの相対速度を算出する第3の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第7の受信手段と、
前記第3の相対速度算出手段から得られる目標と第4のレーダとの相対速度を用いて、前記第7の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第3の速度補償手段と、
前記第3の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第3の相関手段と、
前記第3の相関手段により相関演算された第2の受信信号を加算する第3の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第3の測距手段とを備え、
前記第1のレーダ、第2のレーダ、第3のレーダ又は第4のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段及び前記第4のレーダの第3の測距手段から得られる測距結果から求められる測位方程式に基づいて2次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項6】
第1のレーダ、第2のレーダ、第3のレーダ及び第4のレーダが2次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する第1の相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記第3の受信手段から得られる第2の受信信号を相関演算する第1の相関手段と、
前記第1の相関手段から得られる第2の受信信号のレンジを補正すると同一になるように、前記目標と第1及び第2のレーダとの相対速度を用いてレンジ補正量を算出し、前記レンジ補正量を用いて前記第2の受信信号のレンジを補正する第1のレンジ補正手段と、
レンジ補正された信号に対して加速度補償を行う第1の加速度補償手段と、
加速度補償された第2の受信信号を加算する第1の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第1の測距手段とを備え、
前記第3のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第4の受信手段と、
前記第4の受信手段から得られる第1の受信信号からドップラー周波数を算出する第3のドップラー周波数算出手段と、
前記第3のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第3のレーダとの相対速度を算出する第2の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第5の受信手段と、
前記第5の受信手段から得られる第2の受信信号を相関演算する第2の相関手段と、
前記第2の相関手段から得られる第2の受信信号のレンジを補正すると同一になるように、前記目標と第3のレーダとの相対速度を用いてレンジ補正量を算出し、前記レンジ補正量を用いて前記第2の受信信号のレンジを補正する第2のレンジ補正手段と、
レンジ補正された信号に対して加速度補償を行う第2の加速度補償手段と、
加速度補償された第2の受信信号を加算する第2の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第2の測距手段とを備え、
前記第4のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第6の受信手段と、
前記第6の受信手段から得られる第1の受信信号からドップラー周波数を算出する第4のドップラー周波数算出手段と、
前記第4のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第4のレーダとの相対速度を算出する第3の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第7の受信手段と、
前記第7の受信手段から得られる第2の受信信号を相関演算する第3の相関手段と、
前記第3の相関手段から得られる第2の受信信号のレンジを補正すると同一になるように、前記目標と第4のレーダとの相対速度を用いてレンジ補正量を算出し、前記レンジ補正量を用いて前記第2の受信信号のレンジを補正する第3のレンジ補正手段と、
レンジ補正された信号に対して加速度補償を行う第3の加速度補償手段と、
加速度補償された第2の受信信号を加算する第3の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第3の測距手段とを備え、
前記第1のレーダ、第2のレーダ、第3のレーダ又は第4のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段及び前記第4のレーダの第3の測距手段から得られる測距結果から求められる測位方程式に基づいて2次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項7】
前記第1のレーダ、第2のレーダ、第3のレーダ又は第4のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段及び前記第4のレーダの第3の測距手段から得られる測距結果から求められる測位方程式に基づいて2次元ジオメトリーにおける目標の位置を算出する測位手段の代わりに、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段及び前記第4のレーダの第3の測距手段から得られる測距結果から求められる測位方程式に基づいて逐次近似法によって2次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とする請求項5記載のマルチスタティックレーダ装置。
【請求項8】
前記第1のレーダ、第2のレーダ、第3のレーダ又は第4のレーダは、
前記測位手段から得られる測位結果から2次元ジオメトリーにおける目標の速度を算出する速度算出手段をさらに備える
ことを特徴とする請求項5、6又は7記載のマルチスタティックレーダ装置。
【請求項9】
第1のレーダ、第2のレーダ、第3のレーダ、第4のレーダ及び第5のレーダが3次元ジオメトリーで分離配置されているマルチスタティックレーダ装置であって、
前記第1のレーダは、
目標との相対速度がアンビギュイティなく計測可能な時間間隔で第1のキャリア信号をパルス変調した第1の送信信号を放射する第1の送信手段と、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第1の受信手段と、
前記第1の受信手段から得られる第1の受信信号からドップラー周波数を算出する第1のドップラー周波数算出手段とを備え、
前記第2のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第2の受信手段と、
前記第2の受信手段から得られる第1の受信信号からドップラー周波数を算出する第2のドップラー周波数算出手段と、
前記第1及び第2のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第1及び第2のレーダとの相対速度を算出する第1の相対速度算出手段と、
目標との相対距離がアンビギュイティなく計測可能な時間間隔で第2のキャリア信号をパルス変調し、パルス内を変調した第2の送信信号を放射する第2の送信手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第3の受信手段と、
前記第1の相対速度算出手段から得られる目標と第1及び第2のレーダとの相対速度を用いて、前記第3の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第1の速度補償手段と、
前記第1の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第1の相関手段と、
前記第1の相関手段により相関演算された第2の受信信号を加算する第1の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第1の測距手段とを備え、
前記第3のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第4の受信手段と、
前記第4の受信手段から得られる第1の受信信号からドップラー周波数を算出する第3のドップラー周波数算出手段と、
前記第3のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第3のレーダとの相対速度を算出する第2の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第5の受信手段と、
前記第2の相対速度算出手段から得られる目標と第3のレーダとの相対速度を用いて、前記第5の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第2の速度補償手段と、
前記第2の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第2の相関手段と、
前記第2の相関手段により相関演算された第2の受信信号を加算する第2の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第2の測距手段とを備え、
前記第4のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第6の受信手段と、
前記第6の受信手段から得られる第1の受信信号からドップラー周波数を算出する第4のドップラー周波数算出手段と、
前記第4のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第4のレーダとの相対速度を算出する第3の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第7の受信手段と、
前記第3の相対速度算出手段から得られる目標と第4のレーダとの相対速度を用いて、前記第7の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第3の速度補償手段と、
前記第3の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第3の相関手段と、
前記第3の相関手段により相関演算された第2の受信信号を加算する第3の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第3の測距手段とを備え、
前記第5のレーダは、
目標で反射して戻った前記第1の送信信号を第1の受信信号として受信する第8の受信手段と、
前記第8の受信手段から得られる第1の受信信号からドップラー周波数を算出する第5のドップラー周波数算出手段と、
前記第5のドップラー周波数算出手段から得られるドップラー周波数を用いて、目標と第5のレーダとの相対速度を算出する第4の相対速度算出手段と、
目標で反射して戻った前記第2の送信信号を第2の受信信号として受信する第9の受信手段と、
前記第4の相対速度算出手段から得られる目標と第5のレーダとの相対速度を用いて、前記第9の受信手段から得られる各時刻の第2の受信信号がコヒーレントになる速度補償量を算出し、前記速度補償量を用いて前記第2の受信信号に対し速度補償を行う第4の速度補償手段と、
前記第4の速度補償手段から得られる速度補償された第2の受信信号を相関演算する第4の相関手段と、
前記第4の相関手段により相関演算された第2の受信信号を加算する第4の積分手段と、
積分することにより生成された信号の強度に基づいて目標との相対距離を算出する第4の測距手段とを備え、
前記第1のレーダ、第2のレーダ、第3のレーダ、第4のレーダ又は第5のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段、前記第4のレーダの第3の測距手段及び前記第5のレーダの第4の測距手段から得られる測距結果から求められる測位方程式に基づいて3次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とするマルチスタティックレーダ装置。
【請求項10】
前記第1のレーダ、第2のレーダ、第3のレーダ、第4のレーダ又は第5のレーダは、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段、前記第4のレーダの第3の測距手段及び前記第5のレーダの第4の測距手段から得られる測距結果から求められる測位方程式に基づいて3次元ジオメトリーにおける目標の位置を算出する測位手段の代わりに、
前記第2のレーダの第1の測距手段、前記第3のレーダの第2の測距手段、前記第4のレーダの第3の測距手段及び前記第5のレーダの第4の測距手段から得られる測距結果から求められる測位方程式に基づいて逐次近似法によって3次元ジオメトリーにおける目標の位置を算出する測位手段をさらに備える
ことを特徴とする請求項9記載のマルチスタティックレーダ装置。
【請求項11】
前記第1のレーダ、第2のレーダ、第3のレーダ、第4のレーダ又は第5のレーダは、
前記測位手段から得られる測位結果から3次元ジオメトリーにおける目標の速度を算出する速度算出手段をさらに備える
ことを特徴とする請求項9又は10記載のマルチスタティックレーダ装置。
【図1】

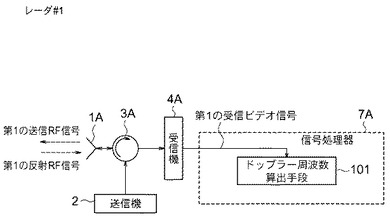
【図2】
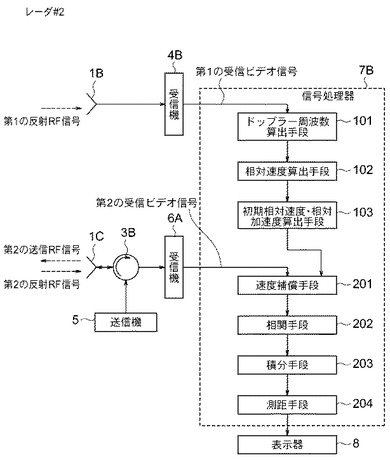
【図3】
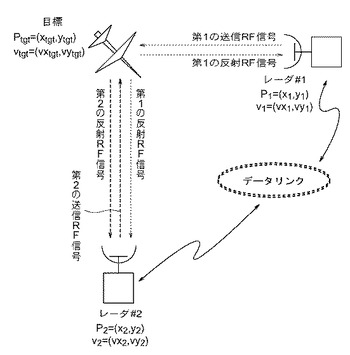
【図4】

【図5】
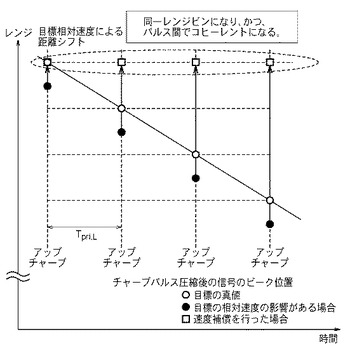
【図6】
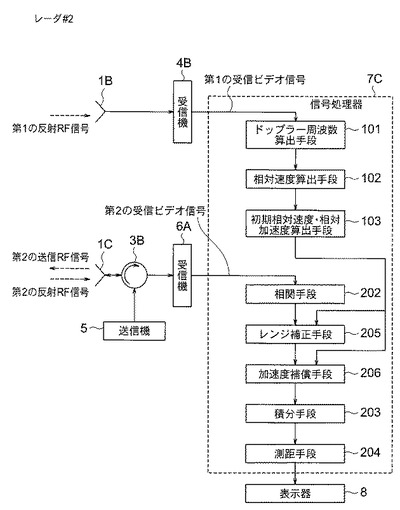
【図7】
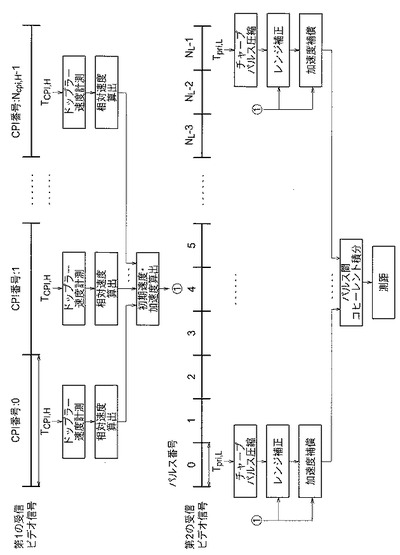
【図8】

【図9】
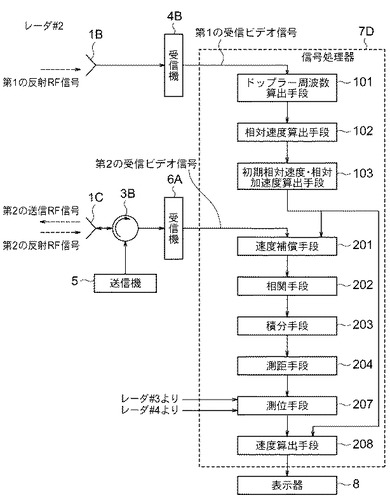
【図10】
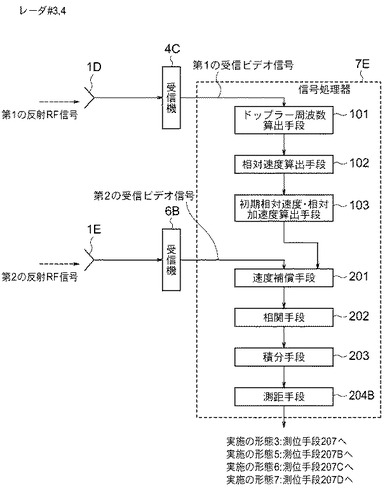
【図11】

【図12】
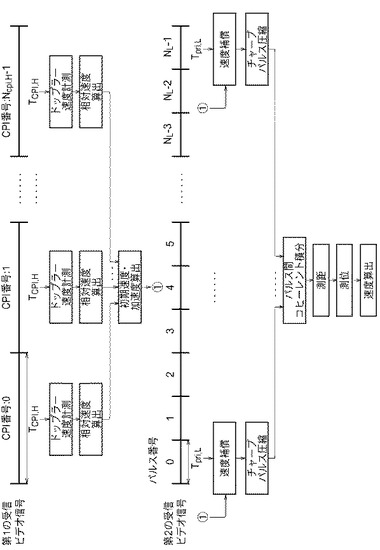
【図13】
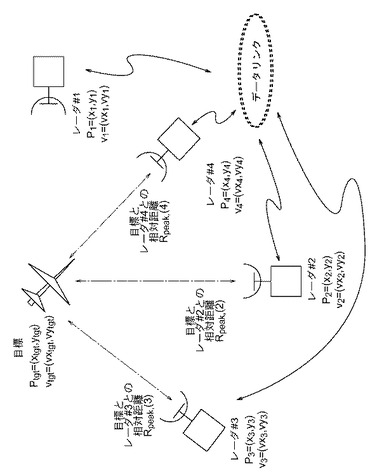
【図14】
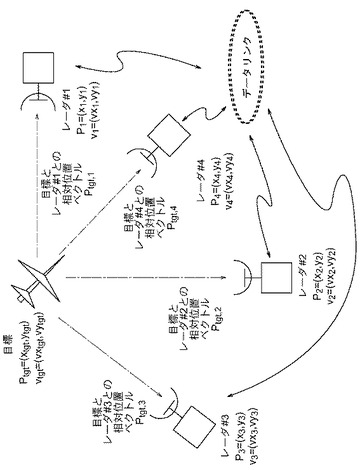
【図15】
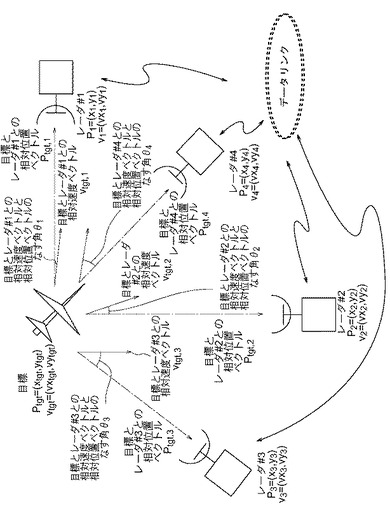
【図16】

【図17】
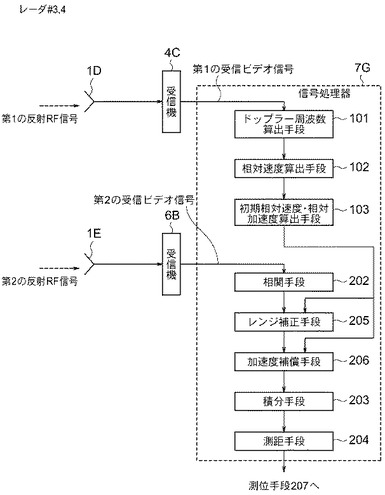
【図18】
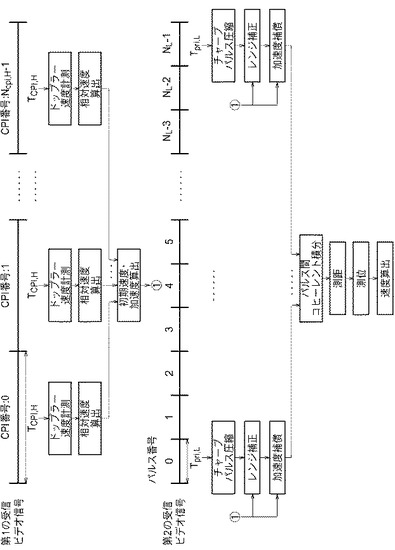
【図19】
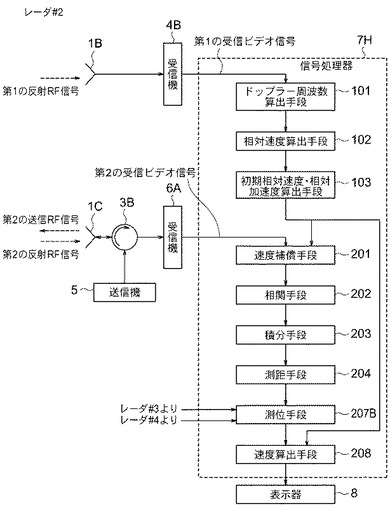
【図20】
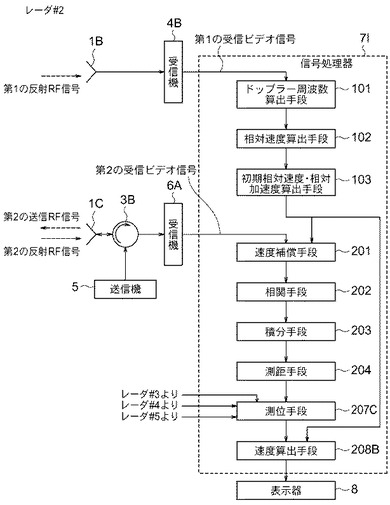
【図21】

【図22】
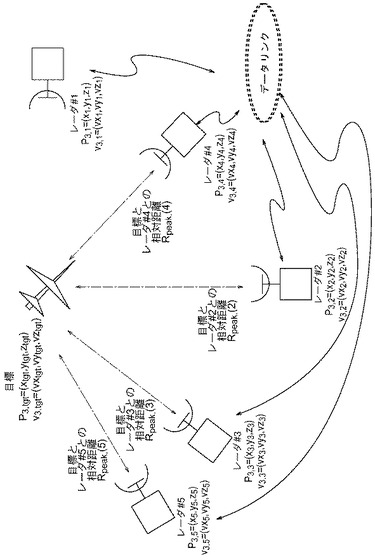
【図23】
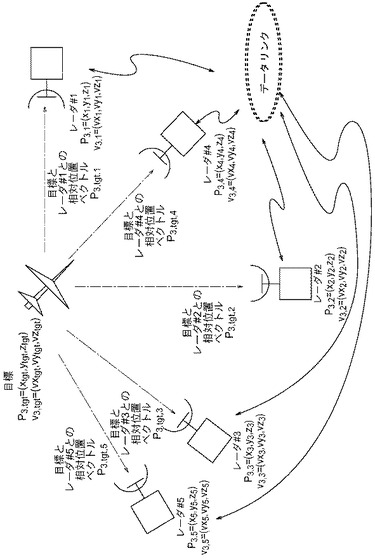
【図24】

【図25】
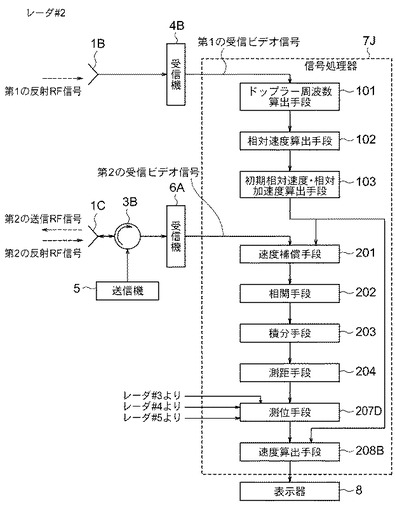
【図26】
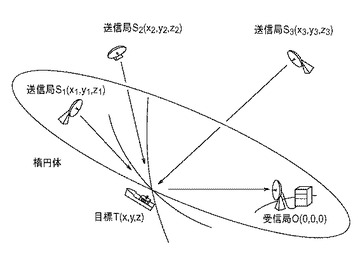
【図27】
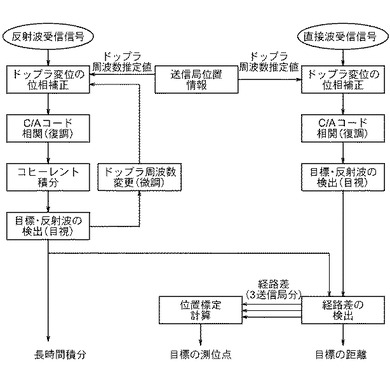
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2009−270827(P2009−270827A)
【公開日】平成21年11月19日(2009.11.19)
【国際特許分類】
【出願番号】特願2008−118720(P2008−118720)
【出願日】平成20年4月30日(2008.4.30)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成21年11月19日(2009.11.19)
【国際特許分類】
【出願日】平成20年4月30日(2008.4.30)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]