
マルチセンサデータの収集/処理
【課題】加速度、角速度、磁界センサ等のマルチプルセンサからのセンサデータを収集し、および/または処理する。
【解決手段】マルチセンサ計測処理ユニット300が付随する加速度計340と、マルチセンサ計測処理ユニット300に接続される外部の幾何学センサ370を備え、マルチセンサ計測処理ユニット300が、加速度計340および幾何学センサ370からのセンサデータに基づいて動きを検出し、加速度計340からの横揺れおよび縦揺れのセンサデータに基づいて幾何学センサ370の傾きを補償する。
【解決手段】マルチセンサ計測処理ユニット300が付随する加速度計340と、マルチセンサ計測処理ユニット300に接続される外部の幾何学センサ370を備え、マルチセンサ計測処理ユニット300が、加速度計340および幾何学センサ370からのセンサデータに基づいて動きを検出し、加速度計340からの横揺れおよび縦揺れのセンサデータに基づいて幾何学センサ370の傾きを補償する。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願のクロスリファレンス)
この特許出願は、2007年3月23日に提出された「マルチセンサ計測処理ユニット(Multi-Sensor Measurement Processing Unit)」と称する仮出願第60/896,795号、2007年3月30日に提出された「マルチセンサ計測処理ユニット(Multi-Sensor Measurement Processing Unit)」と称する仮出願第60/909,380号、および、2007年4月27日に提出された「マルチセンサ計測処理ユニット(Multi-Sensor Measurement Processing Unit)」と称する仮出願第60/914,716号に基づく優先権を主張するもので、それは本願譲受人に譲渡され、ここに引用することで明確に本願に併合される。
【0002】
ここに開示される主題は、マルチプルセンサからのセンサデータを収集し、および/または処理することに関する。
【背景技術】
【0003】
(情報)
昨今の市場では、数多くのアプリケーションをサポートするために種々なセンサが入手可能となっている。これらのセンサは、物理現象をアナログおよび/または電気信号に変換することができる。この種のセンサとして、例えば気圧センサがある。気圧センサは大気圧を計測することに使用できる。気圧センサのアプリケーションとしては、標高の決定を含むことができる。その他のアプリケーションとしては、気象状況に関連するものとして大気圧の観測を含むことができる。
【0004】
他のセンサタイプとして、加速度計がある。加速度計は、重力の方向およびセンサにかかる任意の力を検知することができる。この加速度計は直線運動および/または回転運動を検知することに使用することができ、さらに、例えば傾きおよび/または横揺れを計測することにも使用することができる。
【0005】
さらに他のセンサタイプとして、ジャイロスコープがある。ジャイロスコープは、コリオリの効果を計測するもので、機首方位変化の計測あるいは回転レートの計測のアプリケーションにおいて使用することができる。このジャイロスコープは、例えばナビゲーション(航行術)の分野では重要なアプリケーションを持っている。
【0006】
その他のセンサタイプとして、磁界センサがある。磁界センサは、磁界の強さと、それに対応して磁界の方向を計測することができる。磁界センサの一例として、コンパスがある。コンパスは、自動車の絶対機首方位の決定および歩行者ナビゲーションのアプリケーションにおいて用途がある。
【0007】
生体医用センサも他のセンサタイプの1つを示す。生体医用センサは種々の実現可能なアプリケーションを持っている。生体医用センサの例として、心拍レートモニタ、血圧モニタ、指紋検出、タッチ(7の)センサ、血糖(グルコース)レベル計測センサ、その他がある。
【0008】
上述したセンサおよび、例示はしないがその他の可能なセンサは、特定のアプリケーションに応じて、単独に利用することができ、あるいは他のセンサと組み合わせて用いることができる。例えば、ナビゲーションのアプリケーションにおいて、加速度計、ジャイロスコープ、幾何学センサ、および圧力センサは、十分な程度の可観測性を提供することに利用できる。例えば、加速度計およびジャイロスコープは、6軸の可観測性(x, y, z, τ, φ, ψ)を提供できる。前述したように、加速度計は直線運動(局所的水平面など任意の平面内における物体の移行)を検出できる。この物体の移行は、少なくとも1つの軸について計測できる。加速度計は、オブジェクトの傾き(横揺れまたは縦揺れ)の計測も提供することができる。すなわち、加速度計を用いることによって、デカルト座標空間(x, y, z)内におけるオブジェクトの動きを検出でき、オブジェクトの横揺れおよび縦揺れを評価するために重力方向を検出することができる。ジャイロスコープは、(x, y, z)についての回転レート、すなわち、横揺れ (τ) および縦揺れ (φ)と偏揺れ、これは方位角あるいは“機首方位” (ψ)としても参照される、を計測することに使用できる。
【0009】
ナビゲーションアプリケーションは、多軸計測の可能性をもたらすために1より多いセンサタイプをどのように組合せて利用すればよいのかの、単なる一例である。計測を行うためのマルチセンサの利用は、これらのデバイスのユーザに多くのチャレンジを提示する。このチャレンジには、例えば、マルチセンサの電力消費、接続性、インターフェース、コスト、および/またはサイズが含まれる。
【発明の概要】
【0010】
1つの局面において、デバイスの動きはそのデバイス内に配置された第1センサからの信号の受信に応答して検出されることができ、やはりそのデバイス内に配置された第2センサのパワー状況は検出された動きに応答して変化されることができる。
【図面の簡単な説明】
【0011】
以下、図面を参照して非限定的かつ非消耗的な例を説明する。ここで、全図面を通し、類似部分には類似の参照符号を付している。
【図1】図1は、マルチセンサ計測処理ユニット(MSMPU)の一例のブロック図である。
【図2】図2は、単一デバイス内に集積された複数センサに対してパワー管理を行う処理の一例のフロー図である。
【図3】図3は、マルチセンサ計測処理ユニットの追加例のブロック図である。
【図4】図4は、加速度計により検出された動きに応じてジャイロスコープの動作モードを切り替える処理の一例のフロー図である。
【図5】図5は、マルチセンサ計測処理ユニットのさらなる例のブロック図である。
【図6】図6は、バッファされたセンサデータにタイムスタンプを行う処理の一例のフロー図である。
【図7】図7は、複数センサを較正する処理の一例のフロー図である。
【図8】図8は、移動局が特定領域に入ったかあるいは出たかを決定する処理の一例のフロー図である。
【図9】図9は、加速装置とジャイロスコープ計測を組み合わせる処理の一例のフロー図である。
【図10】図10は、MSMPUの追加例のブロック図である。
【図11】図11は、MSMPUを組み込んだ移動局の一例のブロック図である。
【詳細な説明】
【0012】
この明細書全体において「1つの例」、「1つの特徴」、「例」、「特徴」といった場合、それは、特徴および/または例に関連して記載された特定の特徴、構造、あるいは特性が、クレームされた主題に属する少なくとも1つの特徴および/または例に含まれることを意味している。すなわち、この明細書全体を通して種々な箇所に出てくる「1つの例において」、「例」、「1つの特徴において」、あるいは「特徴」といったフレーズは、必ずしも、全てが同じ特徴および/または例を参照しているわけではない。さらに、特定の特徴、構造、あるいは特性は、1以上の例および/または特徴と組み合わされてもよい。
【0013】
ここに記載される方法論は、特定の例に従うアプリケーションに依存する種々な手段によりインプリメントすることができる。例えば、このような方法論は、ハードウエア、ファームウエア、ソフトウエア、および/またはそれらの組合せによりインプリメントすることができる。ハードウエアインプリメンテーションの場合、例えば、処理ユニットは、1以上の特定用途向け集積回路(ASICs)、デジタル信号プロセサ(DSPs)、デジタル信号処理デバイス(DSPDs)、プログラマブル論理デバイス(PLDs)、フィールドプログラマブルゲートアレイ(FPGAs)、プロセサ、コントローラ、マイクロコントローラ、マイクロプロセサ、電子デバイス、ここに記載する機能を実行するように設計されたその他のデバイス、および/または、それらの組合せでもって、インプリメントすることができる。
【0014】
ここで参照する「インストラクション」は、1以上の論理動作を示す表現に関するものである。例えば、インストラクションは、1以上のデータオブジェクト上で1以上の動作を実行するために機械で解釈可能となっている「機械読取可能な」ものとすることができる。しかしながら、これはインストラクションの単なる例であって、クレームされた主題はそれに限定されない。他の例をあげると、ここに引用されるインストラクションは、エンコードされたコマンドを含むコマンドセットを持った処理回路により実行可能な、エンコードされたコマンドに関するものでもよい。このようなインストラクションは、処理回路により理解される機械語の形態にエンコードされることができる。繰り返すが、これらはインストラクションの単なる例に過ぎず、クレームされた主題がそれに限定されることはない。
【0015】
ここで参照する「格納媒体」は、1以上の機械により認知可能な表現を維持する能力をもつ媒体に関する。例えば、格納媒体は、機械読取可能なインストラクションおよび/または情報を格納する1以上の格納デバイスを含むことができる。このような格納デバイスは、例えば、磁気、光、あるいは半導体などの格納媒体を含む幾つかの媒体タイプのどれでもよい。このような格納デバイスはまた、長期、短期、揮発性、あるいは不揮発性のメモリデバイスのどのタイプでもよい。しかしながら、これらは格納媒体の単なる例示に過ぎず、クレームされた主題はそれに限定されることはない。
【0016】
特に断らない限り、以下の議論から明らかなように、次のことが認識される。すなわち、この明細書全体を通し、“処理する(processing)”、“計算する(computing)”、“算出する(calculating)”、“選択する(selecting)”、“形成する(forming)”、“可能にする(enabling)”、“禁止する(inhibiting)”、“置く(locating)”、“終了する(terminating)”、“同定する(identifying)”、“開始する(initiating)”、“検出する(detecting)”、“得る(obtaining)”、“ホストを務める(hosting)”、“維持する(maintaining)”、“示す(representing)”、“評価する(estimating)”、“受信する(receiving)”、“送信する(transmitting)”、“決定する(determining)”、および/またはその他同様なものなどの用語を利用した議論は、計算プラットフォームにより実行できる活動(actions)および/または処理(processes)を参照するものである。計算プラットフォームとしてはコンピュータあるいは類似の電子計算デバイスがあり、それは、物理的な電子および/または磁気の量、および/または、計算プラットフォームのプロセサ、メモリ、レジスタ、および/または他の情報ストレージ、送信、受信および/または表示デバイス内の物理量として示されるデータの、操作および/または変換を行う。このような活動および/または処理は、例えば格納媒体に格納された機械読取可能なインストラクションによる制御下で計算プラットフォームにより実行できる。このような機械読取可能なインストラクションは、例えば、計算プラットフォームの一部として含まれる(例えば、処理回路の一部として、あるいはこのような処理回路の外部に含まれる)格納媒体内に格納されたソフトウエアまたはファームウエアを含むことができる。さらに、特に断らない限り、フロー図またはその他を参照してここに述べる処理は、このような計算プラットフォームにより、全体的にあるいは部分的に、実行されおよび/または制御されることができる。
【0017】
ここに述べる無線通信技術は、ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)など、種々な無線通信ネットワークに関連することができる。ここでは、“ネットワーク”および“システム”という用語は、互いに入れ替え可能なものとして用いることができる。WWANとしては、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、単一キャリア周波数分割多元接続(SC−FDMA)ネットワーク、あるいはこれらのネットワークの任意の組合せなどがある。CDMAネットワークは、cdma2000、ワイドバンドCDMA(W−CDMA)など1以上の無線アクセス技術(RATs)が正当な少数無線技術として挙げられるように、インプリメントすることができる。ここで、cdma2000は、IS−95、IS−2000、およびIS−856標準に従いインプリメントされた技術を含むことができる。TDMAネットワークは、移動体通信用広域システム(GSM(登録商標))、デジタル先進移動電話システム(D−AMPS)、あるいはその他のRATにインプリメントすることができる。GSMおよびW−CDMAは、“第3世代パートナーシッププロジェクト(3rd Generation Partnership Project)”(3GPP)と称するコンソーシアムからのドキュメントに記載されている。cdma2000は、“第3世代パートナーシッププロジェクト2(3rd Generation Partnership Project 2)”(3GPP2)と称するコンソーシアムからのドキュメントに記載されている。3GPPおよび3GPP2のドキュメントは、公けに入手可能である。例えば、WLANはIEEE802.11xネットワークを含むことができ、WPANはブルートゥースネットワーク、IEEE802.15x、を含むことができる。ここに述べる無線通信のインプリメンテーションは、WWAN、WLAN、および/またはWPANの任意の組合せに関連して使用することもできる。
【0018】
1つの例において、デバイスおよび/またはシステムは、衛星からの信号の少なくとも一部に基づいて、その場所を評価することができる。特に、このようなデバイスおよび/またはシステムは、関連する衛星とナビゲーション衛星受信機との間の距離の概算を含む“擬似レンジ(pseudorange)”計測を得ることができる。特定の例においては、このような擬似レンジは、衛星位置決めシステム(SPS)の一部としての1以上の衛星からの信号を処理する能力を持った受信機において、決定することができる。このようなSPSは、例えば、将来開発される少数のあるいは何らかのSPSとして挙げられる、ガリレオ(Galileo)、グロナス(Glonass)、衛星航法システム(GPS)を含むことができる。その位置を決定するにあたり、衛星ナビゲーション受信機は、3以上の衛星への擬似レンジ計測とともに、送信時におけるそれらの位置を得ることができる。衛星軌道のパラメータを知ることによって、これら衛星の位置を、任意の点で程よい時間に算出できる。擬似レンジ計測は、衛星から受信機まで光速倍の時間で動き回る信号の少なくとも一部に基づいて、決定することができる。ここに述べる技術は、特定の図解において、GPS、EGNOS、WAAS、グロナス、および/またはガリレオタイプのSPS内における場所決定のインプリメンテーションとして提供されているが、これらの技術はSPSの他のタイプにも適用できるものであり、クレームされた主題はそれに限定されないことを理解すべきである。
【0019】
ここに記載される技術は、例えば、前述したSPSを含む1以上の幾つかのSPSで用いることができる。さらに、このような技術は、擬似衛星(pseudolites)あるいは衛星と擬似衛星の組合せを利用する位置決定システムで用いることができる。擬似衛星は、PRNコード、あるいは、Lバンド(または他の周波数の)キャリア信号上で変調されGPS時間に同期できる他の広地域偵察コード(例えば、GPSあるいはCDMAセルラ信号に類似するもの)を放送する地上ベースの送信機を含むことができる。このような送信機には、遠隔受信機による同定が可能となるように、ユニークなPRNコードが割り当てられていてもよい。擬似衛星は、トンネル、坑道、ビル、都市峡谷、あるいはその他の包囲されたエリアの中などのように、軌道上の衛星からのSPS信号が得られなくなるかもしれない場合に有益である。擬似衛星の他のインプリメンテーションとしてはラジオビーコンが知られている。ここで用いられる“衛星”という用語は、擬似衛星、擬似衛星の均等物、その他も含むことが意図されている。ここで用いられる“SPS信号”という用語は、擬似衛星あるいは擬似衛星の均等物からの、SPS的な信号も含むことが意図されている。
【0020】
ここで用いられる移動局(MS)は、時折変化する位置あるいは場所を持つデバイスを参照している。位置および/または場所の変化の例としては、方向、距離、オリエンテーションなどの変化がある。特定の例では、移動局は、セルラ電話、無線通信デバイス、ユーザ機器、ラップトップコンピュータ、パーソナルナビゲーションデバイス(PND)、パーソナルマルチメディアプレーヤ(PMP)、他のパーソナル通信システム(PCS)、および/または他の携帯通信デバイスを含むことができる。移動局は、機械読取可能な情報により制御される機能を実行するような、プロセサおよび/または計算プラットフォームを含むこともできる。
【0021】
上述したように、計測を行うためのマルチセンサの利用は、これらデバイスのユーザに多くのチャレンジを提示できる。このようなチャレンジには、例えば、マルチセンサの消費電力、接続性、インターフェース、コスト、サイズを含むことができる。これらの争点に取り掛かるために、ここに述べられた技術は、単一デバイス内に2以上のセンサを集積することを含むことができる。このようなデバイスは、例えば移動局内のコンポーネントを含んでいてもよい。
【0022】
ここに記載される技術は、前述したような広汎なアプリケーションをサポートするために、例えばマルチセンサ計測処理ユニット(MSMPU)をインプリメントすることができる。とはいえ、クレームされた主題の範囲はこれらの特定アプリケーションに限定されることはない。1つの局面において、MSMPUは、次のものを提供することによって、これらのアプリケーションをサポートすることができる。ここで提供するものとは、内部および/または外部コンポーネント(外部接続されたアクセス可能なセンサを含む)、および/または、生および/または前処理されたセンサデータの外部プロセサへの通信における、望ましい信号の振幅、コンディション、計測収集、計測前処理、パワー管理である。外部プロセサは、例えば、移動局(MS)あるいは任意のその他のプロセサを含むことができる。
【0023】
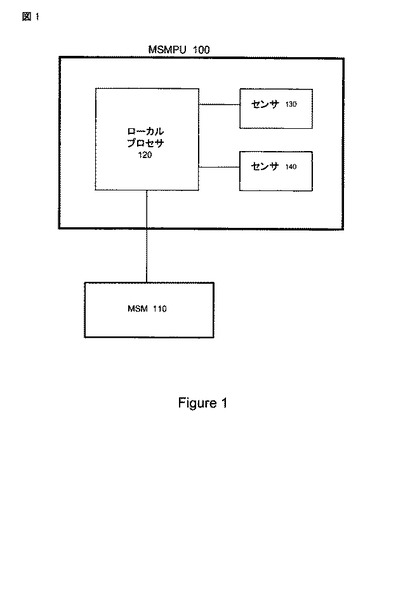
図1は、プロセサを含むことができ、MSモデム(MSM)110に接続されたMSMPU100の例を示すブロック図である。この例では、MSMPU100は一対のセンサ130および140を含んでいる。この例は、ローカルプロセサ120も含んでいる。センサ130および/またはセンサ140は、それらに限定されるわけではないが、加速度計、ジャイロスコープ、地磁気センサ、圧力センサ、生体医用センサ、および温度センサなどを含む、広汎なセンサタイプのうちの任意のものを含むことができる。1つの局面において、ローカルプロセサ120は、例えば回路構成を含むことができ、および/またはパワー管理プログラムを実行することができる。センサ130および140は、1つまたは双方のセンサ内における電力消費を選択的に制御するために、パワー管理システムの制御下で、パワーステージ間を遷移することができる。例えば、センサ130は“オフ”または“スリープモード”に置くことができ、そこではセンサは殆どあるいは全く電力を消費しない。センサ140は、恐らくは機能性が制限された状態で、ローパワーモード下で動作できる。センサ140は、あるポイントにおいて、トリガイベントを検出できる。センサ140がトリガイベントを検出すると、ローカルプロセサ120は、センサ130をオンし、センサ140を通常動作モードに置くこともできる。一方、他の局面において、センサ130が“オフ”あるいは“ローパワーモード”状態に置かれることができる間は、センサ140は通常動作モードで動作することができる。センサ140がトリガイベントを検出すると、ローカルプロセサ120はセンサ130をオンしてそれも通常動作モードに置くことができる。
【0024】
1つの局面において、パワー管理システムは、ローカルプロセサ120内に専用ロジックを含むことができる。専用ロジックは、種々な内部および/または外部コンポーネントに対して、パワーのオン/オフ、省電力動作、および/またはスリープモードの管理を行うことができる。例えば、専用ロジックは、センサ130および140に対してパワー管理を提供できる。他の局面においては、パワー管理システムは、ローカルプロセサ120上で実行可能なソフトウエアインストラクションの少なくとも一部として、インプリメントされてもよい。
【0025】
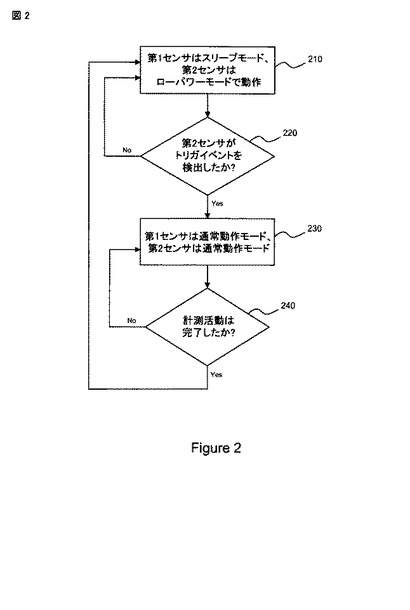
図2は、移動局内に設置された一対のセンサをパワー管理する処理の例を示すフロー図である。ブロック210において、第1センサはスリープモードあるいは“オフ”モードにあるが、これは第1センサが殆どあるいは全く電力を消費しないことを意味する。また、ブロック210において、第2センサはローパワーモードで動作している。ブロック220では、第2センサがトリガイベントを検出したか否かの決定を行うことができる。第2センサがトリガイベントを検出したことに応答して、計測活動を行うために、ブロック230において、第1センサを通常動作モードにおき、第2センサを通常動作モードにおくことができる。この2つのセンサは、計測活動が完了するまで通常動作モードのままにしておくことができる。ブロック240において、計測活動が完了していたならば、ブロック210において第1センサはオフされあるいは“スリープ”モードとされることができ、その間、第2センサはローパワーモードにおかれる。クレームされた主題に従った例は、ブロック210〜240の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図2のフロー図は、一対のセンサのパワー管理を行うための単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0026】
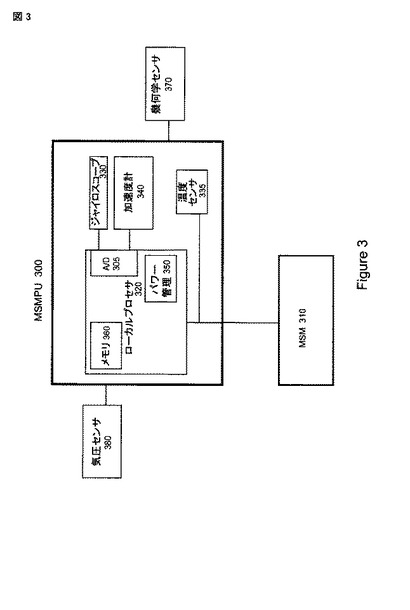
図3は、ローカルプロセサ320、メモリ360、パワー管理ユニット350、ジャイロスコープ330、加速度計340、および温度センサ335を含むMSMPU300の例を示すブロック図である。MSMPU300は、例えばMSM310などの外部プロセサに接続することができる。この例では、ジャイロスコープ330および/または加速度計340は、ローカルプロセサ320にアナログ信号を提供できるようになっている。MSMPUは、ジャイロスコープ330、加速度計340、および/またはその他のセンサからのアナログ信号をデジタル化するために、アナログからデジタルへのコンバータ(A/D)305を含むことができる。この例では、幾何学センサ370および気圧センサ380がMSMPU300に接続されている。1つの局面において、幾何学センサ370などの外部接続されたアナログセンサを処理するために、信号増幅および調整の回路構成を含むことができる。例示のMSMPU300ではローカルプロセサ320内にA/D305およびメモリ360が集積されるように記述されているが、A/D305およびメモリ360の1つあるいは両方がローカルプロセサ320内に集積されないような他の例も可能である。さらに、MSMPU300における特定の配列および構成は、単なる例に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0027】
この例では、幾何学センサ370はMSMPU300に集積されておらず、MSMPU300を組み込んだデバイス内の他の場所に配置されている。MSMPUから離れて幾何学センサを位置決めできることから、幾何学センサに柔軟な配置を許容できるようになる。従い、このような幾何学センサの配置の柔軟性は、例えば電磁干渉および/または温度の影響を減らすにあたり、形状係数(form factor)の設計および配置においてより大きな柔軟性をもたらすことができる。
【0028】
1つの局面において、外部センサ370および/または380、そしてMSM310は、これに限定するものではないが、I2Cおよび/またはSPIインターコネクトを含む広汎な内部接続タイプのいずれかを介して、MSMPU300に接続することができる。もちろん、これは内部接続タイプの例に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0029】
他の局面では、MSMPU300は、MSM310あるいはその他のコンポーネントに接続されるインタラプトピンがインプリメントされたものでもよい。MSMPU300は、一例では、ラッチされたインタラプトモードにおいてインタラプト信号を操作するものとすることができる。さらに、MSMPU300は、インタラプトピンを設定するために内部プログラマブルスレショルドと専用回路構成を組み込んだものでもよい。しかしながら、これらはインタラプト信号をどのようにしてインプリメントできるのかの単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0030】
他の局面では、MSMPU300は、MSM310あるいはその他のコンポーネントに接続された少なくとも1つの汎用プログラマブルIOピン(GPIO)をインプリメントできる。MSMPU300は、このGPIOピンを、例えば、接続されたコンポーネントのパワーがオンおよびオフするように動作させることができる。
【0031】
他の局面では、パワー管理ユニット350は、ジャイロスコープ330および加速度計340にパワー制御信号を提供することができる。パワー管理ユニット350は、専用回路構成としてインプリメントすることができ、あるいは、メモリ360内に格納されローカルプロセサ320により実行されるソフトウエアおよび/またはファームウエアとしてインプリメントすることができる。
【0032】
一例として、加速度計340がローパワーモードで動作している間、ジャイロスコープ330はオフされてもよい。ローパワーモードにある間、加速度計340は、MSMPU300を組み込んだデバイスの動きを検出するよう動作できる。動きが検出されると、加速度計340は通常動作モードに入ることができ、ジャイロスコープ330もパワーオンされて通常動作モードに入ることができる。1つの局面において、センサ330および340の各々、そして、幾何学センサ370および気圧センサ380などインプリメントされた外部センサの幾つかについては、互いに独立して、パワーオンされ、スリープとされ、ローパワー動作モードとされ、および/または通常動作モードとされることができる。このようにして、パワー管理ユニット350は、広汎で可能なアプリケーション、状況、およびパフォーマンスの要求に渡って、電力消費高を調整することができる。他の局面では、MSMPU300は、ジャイロスコープ330および/または加速度計340に対してパワーの回復を早める処理をインプリメントできる。1つの例では、パワーを回復させる2以上の高速化処理(ウェイクアップモード)の1つを選択することができる。ここで、異なるモードは、ウェイクアップ時間と電流消費高の間で様々な折衷案を提示する。
【0033】
一例を挙げると、加速度計340の出力は、MSMPU300内あるいはMSMPU300を組み込んだデバイスの何処かに集積された他のセンサをオンさせるスイッチとして用いることができる。このような外部センサは、MSMPU300として同じ台上に組み込むことができ、あるいは、単一のシステム・イン・パッケージ(SIP)としてインプリメントすることができる。MSMPU300を組み込んだデバイスの外部に外部センサを設置することもできる。外部センサは、恐らくは、以降でさらに述べるように、無線内部接続を介して、あるいはその他のタイプの内部接続を介して、MSMPU300に遠隔接続される。
【0034】
他の局面では、MSMPU300内に集積されたセンサは、プログラマブルおよび/または選択可能な特性を持つことができる。例えば、加速度計340には、選択可能な“g”、一例を挙げれば恐らくは2ないし16g、のレベルをインプリメントできる。他の例を挙げれば、ジャイロスコープ330は、一例として恐らくは50ないし500deg/secの幅で、選択可能な角速度幅を持つことができる。しかしながら、これらの幅は加速度計340およびジャイロスコープ330に対する単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0035】
さらに他の局面では、MSMPU300は、計測データに対して選択可能な出力分解能を組み込むことができる。一例を挙げれば、ローパワー消費モードに対する7ビット、または通常動作モードに対する14ないし16ビットのいずれかの分解能を、選択することができる。さらに、MSMPUは、MSM310に対して選択可能なバンド幅で動作できる。一例を挙げれば、25ないし1500Hzの間でバンド幅を選択可能とすることができる。
【0036】
他の局面では、MSMPU300およびそれに付随するセンサは、ナビゲーションアプリケーションに用いられてもよい。加速度計340は、1以上の他のセンサに対するパワー管理機能をトリガするために2つのスレショルド(上と下)を超えるか下回るかその間にあるかのいずれかとしてMSMPU300を組み込んだデバイスの動き(加速度の変化)および/または傾斜角の変化を検出するよう、予めプログラムされ、および/または予め構成されることができる。このようにして、例えば、幾何学センサ370および/またはジャイロスコープ330および/または気圧センサ380および/またはカメラセンサ(図示せず)および/または、MSMPUを組み込んだあるいはMSMPUに遠隔接続されるデバイスに集積された他のセンサは、動きが検出されたら、ナビゲーションアプリケーションを実行するためにパワーオンされることが可能となる。同様に、動きが検出されない(デバイスが静止している)ときは、他のセンサのうちの任意のものあるいはその全てがスリープ、ローパワー、あるいはオフモードとなるように、加速度計の出力を用いることができ、これにより電力消費が減る。
【0037】
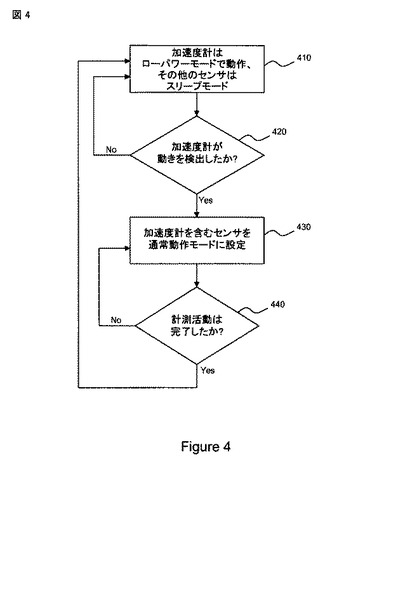
図4は、移動局内の、加速度計を含む2以上のセンサをパワー管理する処理例のフロー図である。ブロック410において、1以上のセンサがスリープモードにあるが、これはその1以上のセンサが殆どあるいは全く電力を消費しないことを意味する。また、ブロック410では加速度計はローパワーモードで動作することができる。ブロック420は、加速度計が動きを検出したら、ブロック430において、先にスリープモードに入っていた1以上のセンサが通常動作モードで動作するように目覚めることができることを、示している。加速度計はまた、恐らくはジャイロスコープおよび/または幾何学センサを含む1以上の他のセンサに関連して計測活動を行うようにするために、通常動作モードに入ることもできる。種々なセンサは、恐らくは一例としてのナビゲーション操作を含む計測活動が完了するまで、通常動作モードに留まることができる。計測活動が完了すると、ブロック440において、1以上のセンサはスリープモードに戻ることができ、加速度計はブロック410でローパワーモードに置かれることができる。クレームされた主題に従った例は、ブロック410〜440の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図4のフロー図は単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0038】
他の局面では、ジャイロスコープが衝撃破損から保護されるようジャイロスコープをパワーダウンさせるために、加速度計340を、MSMPUを組み込んだデバイス、恐らくは移動局、の自由落下状況を検出するために用いてもよい。この処理は、落下衝撃から保護するためにハードディスクのリード/ライトヘッドをパーキングさせる処理に類似しているといえる。
【0039】
前述したように、MSMPU300内にインプリメントされたパワー制御ロジックは、加速度計340およびジャイロスコープ330のような内部センサのパワーオンまたはオフもしくは動作モードの切り替えのみならず、幾何学センサ370および気圧センサ380のような外部センサのパワーオンまたはオフもしくは動作モードの切り替えも、行うことができる。他の局面では、パワー管理ユニット350を、例えばMSM310のような外部プロセサのパワーオンまたはオフもしくは動作モードの切り替えを行うように用いることもできる。さらに他の局面では、種々な内部および外部のセンサおよび/またはプロセサおよび/または他のコンポーネントに対する動作モード切り替えが有益となるであろう条件を決定する処理を、パワー管理ユニット350が実行するようにしてもよい。もちろん、これらはパワー管理ユニット350により実行できるパワー管理処理の単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0040】
他の例として、ローカルプロセサ320を、加速度計340およびジャイロスコープ330の少なくとも1つからの計測に基づく動きの検出に用いることができる。さらに、動き検出のイベントは、MSM310などの外部プロセサ上にあるインストラクションの実行を開始させることに用いることができる。
【0041】
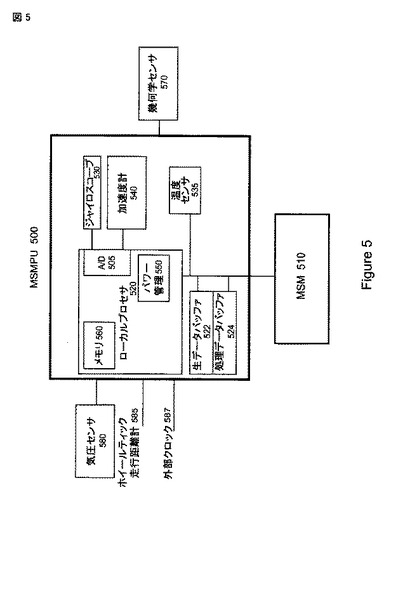
図5は、移動局モデム(MSM)510に接続されたMSMPU500の例を示すブロック図である。一例として、MSMPU500およびMSM510を移動局に組み込むことができる。MSMPU500は、ローカルプロセサ520、メモリ560、パワー管理ユニット550、ジャイロスコープ530、加速度計540、および温度センサ535を含むことができる。一例では、ジャイロスコープ530および/または加速度計540はローカルプロセサ520にアナログ信号を提供することができる。MSMPUは、ジャイロスコープ530、加速度計540、および/または他のセンサからのアナログ信号を変換する、アナログからデジタルへのコンバータ(A/D)505を含むことができる。ある局面では、パワー管理ユニット550は、ジャイロスコープ530および加速度計540にパワー制御信号を提供することができる。パワー管理ユニット550は、専用回路構成によりインプリメントされることができ、あるいは、メモリ560内に格納されローカルプロセサ520により実行されるソフトウエアおよび/またはファームウエアとしてインプリメントされることができる。この例では、MSMPU500はさらに、気圧センサ580および幾何学センサ570へ接続することができ、ホイールティック走行距離計信号585および外部クロック信号587を受信することもできる。しかしながら、これはMSMPUの構成とそれに付随するセンサおよび信号の単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0042】
また、この例では、MSMPUは、センサから、および/またはローカルプロセサ520から、および/またはMSM510などの外部プロセサからのデータを格納するような1以上のバッファを含むことができる。図5に描かれた例では、MSMPU500は、生データバッファ522および処理データバッファ524を含むことができる。バッファ522および/または524によりもたらされるバッファリング能力は、MSMPU500内に含まれおよび/または接続される種々なコンポーネントにより生成されている種々な計測のために、用いることができる。例えば、1以上のセンサから得られる計測のレートは、これらの計測がプロセサ520により処理されるか、および/または、一例として恐らくはMSM510となるであろう外部プロセサなどの外部コンポーネントへ送信される際のレートと、異なっていてもよい。さらに、1以上のセンサからの計測データは、そのデータをMSM510あるいは他のコンポーネントへバースト状に送信するために、1以上のバッファ内に集められてもよい。他の局面では、生データバッファ522はデータをその生のままの形態(1以上のセンサから引き渡されたままとして)で格納することに使用でき、また、処理データバッファはローカルプロセサ520あるいはMSM510などの外部プロセサのいずれかにより何らかの方法で処理されたデータのために使用することができる。このような処理は、フィルタリング、アベレージング、サブサンプリング、アウトライアー検出、および/または、時のインスタンス(instance of time)を1以上の計測に提携させるデータのタイムサンプリングのうちの、任意のタイプを含むことができる。もちろん、ここに記載されるバッファリング技術は単なる技術例に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0043】
さらに他の局面は、例えばバッファ522またはバッファ524のいずれかなどのバッファ内に計測を格納することによる、あるいは例えばメモリ560などのメモリ内に計測を格納することによる、種々なセンサ計測のタイムサンプリングを含むことができる。計測データには、その計測データを例えばMSM510などの外部コンポーネントへ送信する際に、タイムスタンプすることができる。このタイムスタンプは、一例では、外部クロック信号587より受け取ったクロック信号に基づいて行うことができる。例えば、外部クロック信号587は、種々な普通のクリスタルのいずれか、例えば32KHzクリスタルによって、発生することができる。外部クロック信号は、ローカルプロセサを走らせるために必要なより高い周波数信号を合成するために、ローカルフェイズロックループ(PLL)回路で用いられてもよい。
【0044】
他の局面では、一例として恐らくは毎秒1パルスの周期的な時間基準パルスを、MSMPU500がMSM510あるいは他の外部プロセサから受け取ってもよい。ここで、外部プロセサは、SPSにより、あるいは協定世界時(UTC)標準により、もしくはその他の知られたシステム時間によって提供されるような基準時間標準にアクセスするものである。バッファデータは、このようなシステム時間情報から引き出される情報、例えばSPSから引き出される時間情報でもって、タイムスタンプされることができる。このようにして、ナビゲーションアプリケーションのためのSPS衛星計測のような、他のタイムスタンプされたデータとセンサデータの組合せを有効化できる基準時間に、タイムスタンプを同期させることができる。他の局面では、外部プロセサ(例えばセンサ情報に対するクライアント)は、センサデータに対する計測期間を定義するために、開始および停止時間のようなタイミング情報を提供することができる。ナビゲーションアプリケーションにおいては、これら開始および停止時間は、シーケンシャルなSPS計測時間タグに対応することができ、センサデータを受信したSPSデータに同期させることに使用できる。計測期間を定義するためにSPS時間タグを用いることは、単なる1つの技術例である。他の例では、多くの異なるソースからの時間タグが計測時間の期間を定義することに使用できる。
【0045】
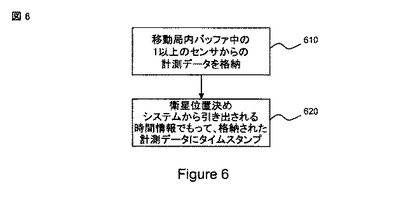
図6は、計測データをタイムサンプリングする処理例を示すフロー図である。ブロック610において、1以上のセンサからの計測データは移動局内のバッファに格納することができる。ここで、移動局は1以上のセンサを含んでいる。ブロック620において、格納された計測データは、衛星位置決めシステムあるいはその他の一般的な基準システムから引き出される時間情報でもって、タイムスタンプされることができる。クレームされた主題に従った例は、ブロック610〜620の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図6のフロー図は単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0046】
他の局面において、外部クロック587を介して、あるいはSPSまたは他の時間パルスソースを介して受信されるような周期的な時間基準パルス信号は、バッファ522および/または524からあるいはメモリ560からMSM510などの外部コンポーネントへのセンサデータ送信を開始するのに、用いることができる。例えば、MSMPU500は、所定のプロセスに従いセンサ計測を処理でき、センサデータをバッファ522および524の1つもしくは両方、またはメモリ560内のいずれかに格納でき、そして、センサデータを送信できる。この送信は、周期的な時間基準信号の受信に応答して行うことができる。あるいは、例えばMSM510などの外部コンポーネントからの、またはMSM510と通信中のデバイスからの“受信準備できました”というメッセージの受信に応答して、行うことができる。
【0047】
他の例では、送信の開始は、I2C、SPI、UART、パラレルポート、その他の一般的なI/O周辺機器あるいはインターフェースからの“受信準備できました”メッセージの受信により、トリガされてもよい。同じ周辺機器および/またはインターフェースは、計測タイムスタンピングおよび/またはMSMPU500とMSM510などの外部コンポーネントとの間の同期維持のために、MSMPU500へ外部時間情報を提供することに使用されてもよい。
【0048】
他の局面では、MSMPU500内に集積されるか、および/またはMSMPU500に外部接続されるかのいずれかのセンサを較正するために、回路構成および/またはソフトウエアを提供することができる。MSM510などの外部プロセサがナビゲーションアプリケーションの実行に用いられるときは、そのナビゲーションアプリケーションは、移動局などのオブジェクトに付随する1以上の状態を評価することができる。ここで、1以上の状態は、それに限定されるわけではないが、地理的な場所、標高、速度、機首方位、および/またはオリエンテーションなどを含むことができる。1以上の評価された状態は、移動局に組み込まれたセンサの種々なパラメータを較正することに使用できる情報を、提供することができる。これらのパラメータの例としては、加速度計バイアス、ドリフト、温度の関数としてのバイアス、温度の関数としてのドリフト、温度の関数としての計測ノイズ、温度の関数としての感度、センサがボードに設置(マウント)された結果あるいはエージングの結果としてのパラメータのいずれかにおける変動、その他がある。しかしながら、これらは較正できるパラメータの単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0049】
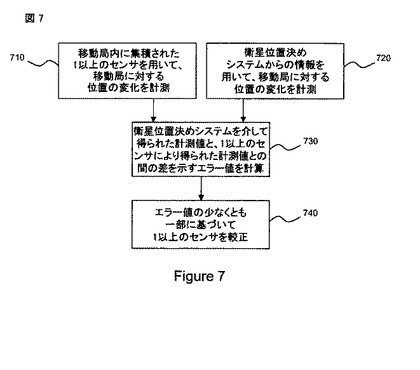
図7は、センサを較正する処理例のフロー図である。710において、移動局の位置、速度、および標高のうちの少なくとも1つにおける変化は、移動局に集積された1以上のセンサを用いて計測できる。位置の変化は、例えば移動局が動き回る方向および/または距離の計測によって、計測することができる。移動局の位置変化は、720において、衛星位置決めシステムからの情報を用いて計測できる。730において、誤差値を算出することができる。この誤差値は、1以上のセンサにより得られた計測と、衛星位置決めシステムにより得られた計測との間の違いを示している。740において、1以上のセンサは、誤差値の少なくとも一部に基づいて較正されることができる。クレームされた主題に従った例は、ブロック710〜740の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図7のフロー図はセンサを較正するための単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0050】
他の局面では、MSMPU500を組み込んだデバイスが静止していることを決定できるように、回路構成および/またはソフトウエアおよび/またはファームウエアを提供できる。この決定は、ローカルプロセサ520上で実行されるソフトウエアおよび/またはファームウエアにより行うことができ、あるいは外部入力から提供することができる。例えば、ホイールティック走行距離計入力信号585は静止状態を示すことができる。1つの局面において、ホイールティック走行距離計入力信号585は、センサ較正処理内で用いることができる。他の局面では、静止状態は、ジャイロスコープ530および/または気圧センサ580を較正することに用いることができる。MSMPU500を組み込んだデバイスが静止していることが分かっているときは、気圧の何らかの変化は、標高の変化ではなくて、気圧に実際の変動がもたらされたものとすることができる。
【0051】
さらなる局面においては、MSMPUは、例えば、セルホン、パーソナルデジタルアシスタンス、ノートブックコンピュータ、その他を含む広汎なデバイスの、いずれかに組み込むことができる。このようなデバイスは、時折、クレードルあるいはドッキングステーションに設置されることがある。一例において、このようなデバイスがクレードルあるいはドッキングステーションに設置されるときは、そのデバイスは静止している。MSMPU500は、このようなデバイスがクレードルあるいはドッキングステーションに設置されそのデバイスが静止していることを推定する指示を、検知しまたは受信することができる。一例では、この静止状態の指示は、前述したような較正動作を行う際に利用できる。他の局面では、MSMPU500は、静止状態からの遷移を、例えば動き検出を通じて、検出できる。
【0052】
付加的な局面では、温度センサ535は、温度の関数としてセンサパフォーマンス特性を発展させるために、較正動作の実行において使用できる温度計測を提供することができる。1つの例では、温度の関数としての加速度計ドリフト値のテーブルを探知してメモリ560内に格納することができる。センサ較正データ(バイアスおよびドリフトなど)は、センサデータ修正のためにMSMPU500に提供できる。較正データで生のセンサデータを修正することは、種々なアプリケーションの可能性をもたらすことができる。このアプリケーションには、それに限定するものではないが、推測航法(dead-reckoning)アプリケーションに対する動き検出と動き統合が含まれる。推測航法(DR)は、自身の現在位置と、既知あるいは計測された速度、時間経過、および機首方位に基づく位置の前進を評価する処理を、参照することができる。
【0053】
他の局面では、幾何学センサ570からのデータは、ジャイロスコープ530バイアスを較正することに使用でき、さらに、この幾何学センサにより示される絶対機首方位を初期化することにも使用できる。よりよい方向情報を提供するために、加速度計540からの横揺れおよび縦揺れ計測を用いて幾何学センサ570の傾き補償をすることは、有益といえる。傾き補償処理は、MSMPU500内にある専用回路構成によりインプリメントすることができ、および/または、ローカルプロセサ520および/またはMSMPU500により実行できるソフトウエアおよび/またはファームウエア内にインプリメントすることができる。この傾き補償処理は、外部接続された幾何学センサ570から受信する計測データを利用することができる。幾何学センサ570内に集積されるか幾何学センサ570の近傍に設置されるかのいずれかの他の温度センサから、あるいは温度センサ535からのデータを組み込むこともまた、有益であるといえる。他の局面では、角度情報内の変化を計測する幾何学センサ570からの、シーケンシャルな、および/または周期的な、および/またはイベントトリガされた計測を用いて、ジャイロスコープ530を較正してもよい。
【0054】
さらに他の局面では、MSMPU500は、動き回りの距離および方向(例えば動きの軌道または経路)の変化を決定するために、加速度計540およびジャイロスコープ530からの計測を組み込むことにより動きの統合(motion integration)を行うことができる。この局面は、MSMPU500を組み込んだオブジェクトが関心のある領域を出たか入ったかを決定することが望ましい、土地囲いアプリケーション(geo-fencing applications)で有利に用いられることができる。この関心のある領域は、例えば、プリセットされおよび/またはプログラマブルな半径を持つ円として定義することができるが、これは関心のある領域をどのように定義することができるかの例に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0055】
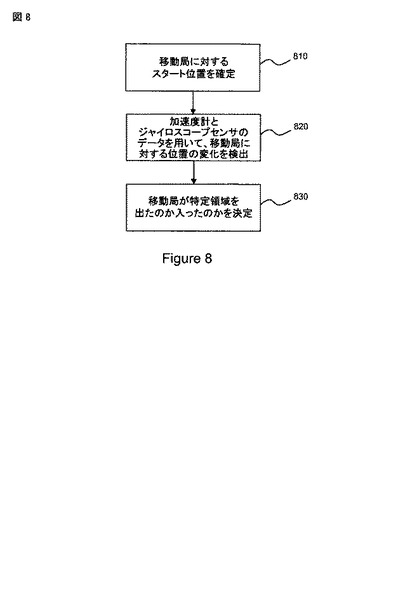
図8は、土地囲いアプリケーションの例を示すフロー図である。ブロック810において、移動局に対するスタート位置を確定することができる。ブロック820において、移動局に対する位置変化は、加速度計とジャイロスコープのセンサデータを用いて決定できる。この位置変化は、例えば、当業者にとっては周知の技術を用いて移動局に対する動き回りの方向および/または距離を検出することにより、検出することができる。ブロック830では、移動局が特定領域を出たか入ったかに関する決定を行うことができる。クレームされた主題に従った例は、ブロック810〜830の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図8のフロー図は土地囲いのための単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0056】
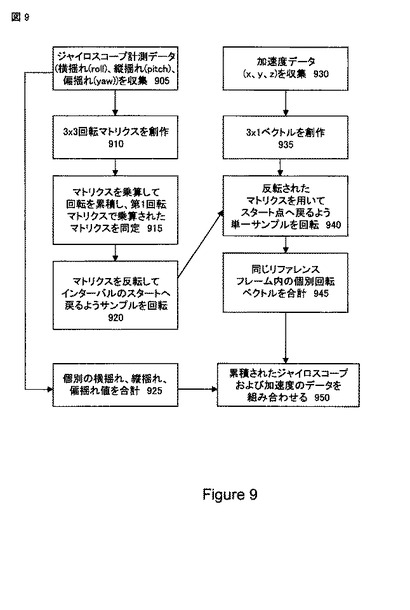
図9は、加速度計540およびジャイロスコープ530の双方からの情報を組み合わせる処理例のフロー図である。このような情報は動き統合および回転のデータを含むことができ、このような情報は土地囲いおよび/またはナビゲーションDRの動作をサポートするために利用することができる。通常、ジャイロスコープ530からの情報は、移動局のオリエンテーションが三次元空間内でオリジナルのオリエンテーションからどのくらい回転したかを計算することに用いることができる。その結果としての回転マトリクスは、加速度計が計測期間の始めにあったときの計測フレーム(オリジナルオリエンテーション)へ加速度計情報を変換し戻すことに使用できる。これらの“回転”計測は、その計測は全て同じオリエンテーションに基づくものなので、正味の変位(net displacement)を決定するためにそれ以前の計測に加算することができる。とくに、この例示技術では、ブロック905において、例えばジャイロスコープ530などのジャイロスコープから、データを獲得できる。ブロック910では3x3マトリクスを創作でき、ブロック925では個別の横揺れ、縦揺れ、および偏揺れ (機首方位)の値を合計することができる。ブロック910からのマトリクスは、回転を累積するためにブロック915において乗算されることができる。第1の回転マトリクスで乗算されたマトリクスは同定することができる。ブロック920では、インターバルのスタートまでサンプルが回転して戻るように、そのマトリクスは反転されることができる。そして処理はブロック940へ進むことができる。ブロック930では加速度計データ(x, y, z)を獲得することができ、ブロック935では3x1ベクトルを創作できる。ブロック940において、ブロック920からの反転マトリクスは、スタート点に戻るようにサンプルポイントを回転させることに使用できる。ブロック945では、同じリファレンスフレーム内からの個別フレームを合計することができる。ブロック950では、(ジャイロスコープ計測からの)累積された回転と、(加速度計計測からの)動き回り距離を、組み合わせることができる。クレームされた主題に従った例は、ブロック905〜950の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図9のフロー図は加速装置およびジャイロスコープの計測を組み合わせるための単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0057】
図10は、無線接続性を備えたMSMPU1000の例を示すブロック図である。MSMPUは、図3および図5に関連して前述した技術と同様なものを含むことができる。無線接続性は、将来の技術を含め、広汎な無線技術のいずれかにより実現できる。このような無線技術のごく少数の例として、ブルートゥース(Bluetooth(登録商標))、ジグビ(ZigBee(登録商標))、近接通信(Near field Communication)(NFC)、およびウルトラワイドバンド(Ultra Wide Band)(UWB)があるが、クレームされた主題の範囲はそれに限定されない。図10では、これらの技術は、無線通信ユニット1092、1094、0196、および1098で示されている。無線接続性を付加することにより、例えばマルチプレーヤゲームのような仲間同士のアプリケーションのために、MSMPU1000を集積したデバイスは、やはりMSMPU1084を含んだ他のデバイスと通信することができる。MSMPU1000はまた、プロセサ1082へ生のセンサ計測、処理されたセンサ計測、任意の程度(これは集積されまたは接続されたセンサの有効性および動作状況に依存するが)の位置(x,y,z)および/または標高(τ,φ,ψ)の情報、位置および/または標高の情報の変化、オイラー角(Euler angles)、四元数(quaternion)、テレメトリデータ、その他を提供するために、外部プロセサ1082と通信することもできる。
【0058】
他の局面では、MSMPU100は、無線技術のいずれかを介して、例えば心拍レートモニタ(HRM)1086および/または血圧(BP)モニタ1088のような1以上の生体医用センサと通信することができる。これらのセンサは、例えば医療および/またはフィットネス/アスレチックの分野のアプリケーションに見ることができる。
【0059】
内部および/または外部のセンサから集めた情報は、ナビゲーション解(navigational solution)および/またはユーザインターフェースおよび/またはゲーム制御信号、カメラ画像安定化信号、その他を得るために、外部プロセサ1082により用いられることができる。他の例では、他のプレーヤに対するあるプレーヤの位置変化あるいは高さ変化もしくは活動を知ることが望ましいマルチプレーヤゲーム環境内で用いることができる相対位置のおよび/または標高の情報を得るために、少なくとも1つのMSMPUからのデータを中央演算ユニットに提供することができる。
【0060】
図11は、移動局1100の例のブロック図である。無線トランシーバ1170は、音声あるいはデータなどのベースバンド情報でRFキャリア信号を変調してRFキャリアに乗せ、このようなベースバンド情報を得るために変調されたRFキャリアを復調することに、用いることができる。アンテナ1172は、変調されたRFキャリアを無線通信リンク上に送信し、無線通信リンク上の変調されたRFキャリアを受信することに、用いることができる。
【0061】
ベースバンドプロセサ1160は、無線通信リンク上への送信のために、中央演算ユニット(CPU)1120からのベースバンド情報をトランシーバ1170へ提供することに用いることができる。ここで、CPU1120は、ユーザインターフェース1110内の入力デバイスからこのようなベースバンド情報を得ることができる。ベースバンドプロセサ1160は、ユーザインターフェース1110内の出力デバイスを介して送信を行うために、トランシーバ1170からのベースバンド情報をCPU1120へ提供することに用いることができる。
【0062】
ユーザインターフェース1110は、音声あるいはデータのようなユーザ情報を入力しあるいは出力するためのデバイスを複数含むことができる。このようなデバイスには、非限定的な例として、キーボード、表示スクリーン、マイクロホン、およびスピーカがある。
【0063】
レシーバ1180は、SPSからの送信を受信し復調し、そして相関器1140へ復調された情報を提供することに用いることができる。相関器1140は、レシーバ1180により提供された情報から相関関数を得ることに用いることができる。相関器1140はまた、トランシーバ1170により提供されたパイロット信号に関係する情報からパイロット関連の相関関数(pilot-related correlation functions)を得ることに用いることができる。この情報は、無線通信サービスを得るために移動局で用いられることができる。チャネルデコーダ1150は、ベースバンドプロセサ1160から受け取ったチャネルシンボルを根元的なソースビットにデコードすることに用いることができる。チャネルシンボルが回旋的にエンコードされたシンボルを含むような例において、このようなチャネルデコーダは、ビタビデコーダ(Viterbi decoder)を含むことができる。チャネルシンボルがシリアルまたはパラレルな回旋的コードの連鎖を含むような第2の例では、チャネルデコーダ1150はターボデコーダ(turbo decoder)を含むことができる。
【0064】
メモリ1130は、ここで記述されあるいは示唆された1以上の処理、インプリメンテーション、あるいは例示を行うために実行可能な、機械読取可能なインストラクションを格納することに、用いることができる。CPU1120は、このような機械読取可能なインストラクションにアクセスして実行することに用いることができる。
【0065】
移動局1100は、例えば、MSMPU1190を備えることができる。MSMPU1190は、ここに述べられたセンサ計測および/またはパワー管理動作のいずれでも、あるいはその全てを行うように、用いることができる。例えば、MSMPU1190は、図1〜10に関連して前述した機能を行うことに使用できる。
【0066】
何が現在例示的特徴として考慮されているかを図示し記述してきたが、クレームされた主題から離れることなく、種々な他の変形がなされてもよく、また均等物が差し替えられてもよいことは、当業者にとって理解されるであろう。加えて、ここに述べられた中心的なコンセプトから離れることなく、クレームされた主題が教示することへの特定の状況に、
多くの変形が適用されてもよい。従い、クレームされた主題は、個々に開示された特定の例に限定されるものではなく、このようなクレームされた主題が添付された請求項の範囲内に入る全ての局面とその均等物を含むことが意図されている。
【技術分野】
【0001】
(関連出願のクロスリファレンス)
この特許出願は、2007年3月23日に提出された「マルチセンサ計測処理ユニット(Multi-Sensor Measurement Processing Unit)」と称する仮出願第60/896,795号、2007年3月30日に提出された「マルチセンサ計測処理ユニット(Multi-Sensor Measurement Processing Unit)」と称する仮出願第60/909,380号、および、2007年4月27日に提出された「マルチセンサ計測処理ユニット(Multi-Sensor Measurement Processing Unit)」と称する仮出願第60/914,716号に基づく優先権を主張するもので、それは本願譲受人に譲渡され、ここに引用することで明確に本願に併合される。
【0002】
ここに開示される主題は、マルチプルセンサからのセンサデータを収集し、および/または処理することに関する。
【背景技術】
【0003】
(情報)
昨今の市場では、数多くのアプリケーションをサポートするために種々なセンサが入手可能となっている。これらのセンサは、物理現象をアナログおよび/または電気信号に変換することができる。この種のセンサとして、例えば気圧センサがある。気圧センサは大気圧を計測することに使用できる。気圧センサのアプリケーションとしては、標高の決定を含むことができる。その他のアプリケーションとしては、気象状況に関連するものとして大気圧の観測を含むことができる。
【0004】
他のセンサタイプとして、加速度計がある。加速度計は、重力の方向およびセンサにかかる任意の力を検知することができる。この加速度計は直線運動および/または回転運動を検知することに使用することができ、さらに、例えば傾きおよび/または横揺れを計測することにも使用することができる。
【0005】
さらに他のセンサタイプとして、ジャイロスコープがある。ジャイロスコープは、コリオリの効果を計測するもので、機首方位変化の計測あるいは回転レートの計測のアプリケーションにおいて使用することができる。このジャイロスコープは、例えばナビゲーション(航行術)の分野では重要なアプリケーションを持っている。
【0006】
その他のセンサタイプとして、磁界センサがある。磁界センサは、磁界の強さと、それに対応して磁界の方向を計測することができる。磁界センサの一例として、コンパスがある。コンパスは、自動車の絶対機首方位の決定および歩行者ナビゲーションのアプリケーションにおいて用途がある。
【0007】
生体医用センサも他のセンサタイプの1つを示す。生体医用センサは種々の実現可能なアプリケーションを持っている。生体医用センサの例として、心拍レートモニタ、血圧モニタ、指紋検出、タッチ(7の)センサ、血糖(グルコース)レベル計測センサ、その他がある。
【0008】
上述したセンサおよび、例示はしないがその他の可能なセンサは、特定のアプリケーションに応じて、単独に利用することができ、あるいは他のセンサと組み合わせて用いることができる。例えば、ナビゲーションのアプリケーションにおいて、加速度計、ジャイロスコープ、幾何学センサ、および圧力センサは、十分な程度の可観測性を提供することに利用できる。例えば、加速度計およびジャイロスコープは、6軸の可観測性(x, y, z, τ, φ, ψ)を提供できる。前述したように、加速度計は直線運動(局所的水平面など任意の平面内における物体の移行)を検出できる。この物体の移行は、少なくとも1つの軸について計測できる。加速度計は、オブジェクトの傾き(横揺れまたは縦揺れ)の計測も提供することができる。すなわち、加速度計を用いることによって、デカルト座標空間(x, y, z)内におけるオブジェクトの動きを検出でき、オブジェクトの横揺れおよび縦揺れを評価するために重力方向を検出することができる。ジャイロスコープは、(x, y, z)についての回転レート、すなわち、横揺れ (τ) および縦揺れ (φ)と偏揺れ、これは方位角あるいは“機首方位” (ψ)としても参照される、を計測することに使用できる。
【0009】
ナビゲーションアプリケーションは、多軸計測の可能性をもたらすために1より多いセンサタイプをどのように組合せて利用すればよいのかの、単なる一例である。計測を行うためのマルチセンサの利用は、これらのデバイスのユーザに多くのチャレンジを提示する。このチャレンジには、例えば、マルチセンサの電力消費、接続性、インターフェース、コスト、および/またはサイズが含まれる。
【発明の概要】
【0010】
1つの局面において、デバイスの動きはそのデバイス内に配置された第1センサからの信号の受信に応答して検出されることができ、やはりそのデバイス内に配置された第2センサのパワー状況は検出された動きに応答して変化されることができる。
【図面の簡単な説明】
【0011】
以下、図面を参照して非限定的かつ非消耗的な例を説明する。ここで、全図面を通し、類似部分には類似の参照符号を付している。
【図1】図1は、マルチセンサ計測処理ユニット(MSMPU)の一例のブロック図である。
【図2】図2は、単一デバイス内に集積された複数センサに対してパワー管理を行う処理の一例のフロー図である。
【図3】図3は、マルチセンサ計測処理ユニットの追加例のブロック図である。
【図4】図4は、加速度計により検出された動きに応じてジャイロスコープの動作モードを切り替える処理の一例のフロー図である。
【図5】図5は、マルチセンサ計測処理ユニットのさらなる例のブロック図である。
【図6】図6は、バッファされたセンサデータにタイムスタンプを行う処理の一例のフロー図である。
【図7】図7は、複数センサを較正する処理の一例のフロー図である。
【図8】図8は、移動局が特定領域に入ったかあるいは出たかを決定する処理の一例のフロー図である。
【図9】図9は、加速装置とジャイロスコープ計測を組み合わせる処理の一例のフロー図である。
【図10】図10は、MSMPUの追加例のブロック図である。
【図11】図11は、MSMPUを組み込んだ移動局の一例のブロック図である。
【詳細な説明】
【0012】
この明細書全体において「1つの例」、「1つの特徴」、「例」、「特徴」といった場合、それは、特徴および/または例に関連して記載された特定の特徴、構造、あるいは特性が、クレームされた主題に属する少なくとも1つの特徴および/または例に含まれることを意味している。すなわち、この明細書全体を通して種々な箇所に出てくる「1つの例において」、「例」、「1つの特徴において」、あるいは「特徴」といったフレーズは、必ずしも、全てが同じ特徴および/または例を参照しているわけではない。さらに、特定の特徴、構造、あるいは特性は、1以上の例および/または特徴と組み合わされてもよい。
【0013】
ここに記載される方法論は、特定の例に従うアプリケーションに依存する種々な手段によりインプリメントすることができる。例えば、このような方法論は、ハードウエア、ファームウエア、ソフトウエア、および/またはそれらの組合せによりインプリメントすることができる。ハードウエアインプリメンテーションの場合、例えば、処理ユニットは、1以上の特定用途向け集積回路(ASICs)、デジタル信号プロセサ(DSPs)、デジタル信号処理デバイス(DSPDs)、プログラマブル論理デバイス(PLDs)、フィールドプログラマブルゲートアレイ(FPGAs)、プロセサ、コントローラ、マイクロコントローラ、マイクロプロセサ、電子デバイス、ここに記載する機能を実行するように設計されたその他のデバイス、および/または、それらの組合せでもって、インプリメントすることができる。
【0014】
ここで参照する「インストラクション」は、1以上の論理動作を示す表現に関するものである。例えば、インストラクションは、1以上のデータオブジェクト上で1以上の動作を実行するために機械で解釈可能となっている「機械読取可能な」ものとすることができる。しかしながら、これはインストラクションの単なる例であって、クレームされた主題はそれに限定されない。他の例をあげると、ここに引用されるインストラクションは、エンコードされたコマンドを含むコマンドセットを持った処理回路により実行可能な、エンコードされたコマンドに関するものでもよい。このようなインストラクションは、処理回路により理解される機械語の形態にエンコードされることができる。繰り返すが、これらはインストラクションの単なる例に過ぎず、クレームされた主題がそれに限定されることはない。
【0015】
ここで参照する「格納媒体」は、1以上の機械により認知可能な表現を維持する能力をもつ媒体に関する。例えば、格納媒体は、機械読取可能なインストラクションおよび/または情報を格納する1以上の格納デバイスを含むことができる。このような格納デバイスは、例えば、磁気、光、あるいは半導体などの格納媒体を含む幾つかの媒体タイプのどれでもよい。このような格納デバイスはまた、長期、短期、揮発性、あるいは不揮発性のメモリデバイスのどのタイプでもよい。しかしながら、これらは格納媒体の単なる例示に過ぎず、クレームされた主題はそれに限定されることはない。
【0016】
特に断らない限り、以下の議論から明らかなように、次のことが認識される。すなわち、この明細書全体を通し、“処理する(processing)”、“計算する(computing)”、“算出する(calculating)”、“選択する(selecting)”、“形成する(forming)”、“可能にする(enabling)”、“禁止する(inhibiting)”、“置く(locating)”、“終了する(terminating)”、“同定する(identifying)”、“開始する(initiating)”、“検出する(detecting)”、“得る(obtaining)”、“ホストを務める(hosting)”、“維持する(maintaining)”、“示す(representing)”、“評価する(estimating)”、“受信する(receiving)”、“送信する(transmitting)”、“決定する(determining)”、および/またはその他同様なものなどの用語を利用した議論は、計算プラットフォームにより実行できる活動(actions)および/または処理(processes)を参照するものである。計算プラットフォームとしてはコンピュータあるいは類似の電子計算デバイスがあり、それは、物理的な電子および/または磁気の量、および/または、計算プラットフォームのプロセサ、メモリ、レジスタ、および/または他の情報ストレージ、送信、受信および/または表示デバイス内の物理量として示されるデータの、操作および/または変換を行う。このような活動および/または処理は、例えば格納媒体に格納された機械読取可能なインストラクションによる制御下で計算プラットフォームにより実行できる。このような機械読取可能なインストラクションは、例えば、計算プラットフォームの一部として含まれる(例えば、処理回路の一部として、あるいはこのような処理回路の外部に含まれる)格納媒体内に格納されたソフトウエアまたはファームウエアを含むことができる。さらに、特に断らない限り、フロー図またはその他を参照してここに述べる処理は、このような計算プラットフォームにより、全体的にあるいは部分的に、実行されおよび/または制御されることができる。
【0017】
ここに述べる無線通信技術は、ワイヤレスワイドエリアネットワーク(WWAN)、ワイヤレスローカルエリアネットワーク(WLAN)、ワイヤレスパーソナルエリアネットワーク(WPAN)など、種々な無線通信ネットワークに関連することができる。ここでは、“ネットワーク”および“システム”という用語は、互いに入れ替え可能なものとして用いることができる。WWANとしては、符号分割多元接続(CDMA)ネットワーク、時分割多元接続(TDMA)ネットワーク、周波数分割多元接続(FDMA)ネットワーク、直交周波数分割多元接続(OFDMA)ネットワーク、単一キャリア周波数分割多元接続(SC−FDMA)ネットワーク、あるいはこれらのネットワークの任意の組合せなどがある。CDMAネットワークは、cdma2000、ワイドバンドCDMA(W−CDMA)など1以上の無線アクセス技術(RATs)が正当な少数無線技術として挙げられるように、インプリメントすることができる。ここで、cdma2000は、IS−95、IS−2000、およびIS−856標準に従いインプリメントされた技術を含むことができる。TDMAネットワークは、移動体通信用広域システム(GSM(登録商標))、デジタル先進移動電話システム(D−AMPS)、あるいはその他のRATにインプリメントすることができる。GSMおよびW−CDMAは、“第3世代パートナーシッププロジェクト(3rd Generation Partnership Project)”(3GPP)と称するコンソーシアムからのドキュメントに記載されている。cdma2000は、“第3世代パートナーシッププロジェクト2(3rd Generation Partnership Project 2)”(3GPP2)と称するコンソーシアムからのドキュメントに記載されている。3GPPおよび3GPP2のドキュメントは、公けに入手可能である。例えば、WLANはIEEE802.11xネットワークを含むことができ、WPANはブルートゥースネットワーク、IEEE802.15x、を含むことができる。ここに述べる無線通信のインプリメンテーションは、WWAN、WLAN、および/またはWPANの任意の組合せに関連して使用することもできる。
【0018】
1つの例において、デバイスおよび/またはシステムは、衛星からの信号の少なくとも一部に基づいて、その場所を評価することができる。特に、このようなデバイスおよび/またはシステムは、関連する衛星とナビゲーション衛星受信機との間の距離の概算を含む“擬似レンジ(pseudorange)”計測を得ることができる。特定の例においては、このような擬似レンジは、衛星位置決めシステム(SPS)の一部としての1以上の衛星からの信号を処理する能力を持った受信機において、決定することができる。このようなSPSは、例えば、将来開発される少数のあるいは何らかのSPSとして挙げられる、ガリレオ(Galileo)、グロナス(Glonass)、衛星航法システム(GPS)を含むことができる。その位置を決定するにあたり、衛星ナビゲーション受信機は、3以上の衛星への擬似レンジ計測とともに、送信時におけるそれらの位置を得ることができる。衛星軌道のパラメータを知ることによって、これら衛星の位置を、任意の点で程よい時間に算出できる。擬似レンジ計測は、衛星から受信機まで光速倍の時間で動き回る信号の少なくとも一部に基づいて、決定することができる。ここに述べる技術は、特定の図解において、GPS、EGNOS、WAAS、グロナス、および/またはガリレオタイプのSPS内における場所決定のインプリメンテーションとして提供されているが、これらの技術はSPSの他のタイプにも適用できるものであり、クレームされた主題はそれに限定されないことを理解すべきである。
【0019】
ここに記載される技術は、例えば、前述したSPSを含む1以上の幾つかのSPSで用いることができる。さらに、このような技術は、擬似衛星(pseudolites)あるいは衛星と擬似衛星の組合せを利用する位置決定システムで用いることができる。擬似衛星は、PRNコード、あるいは、Lバンド(または他の周波数の)キャリア信号上で変調されGPS時間に同期できる他の広地域偵察コード(例えば、GPSあるいはCDMAセルラ信号に類似するもの)を放送する地上ベースの送信機を含むことができる。このような送信機には、遠隔受信機による同定が可能となるように、ユニークなPRNコードが割り当てられていてもよい。擬似衛星は、トンネル、坑道、ビル、都市峡谷、あるいはその他の包囲されたエリアの中などのように、軌道上の衛星からのSPS信号が得られなくなるかもしれない場合に有益である。擬似衛星の他のインプリメンテーションとしてはラジオビーコンが知られている。ここで用いられる“衛星”という用語は、擬似衛星、擬似衛星の均等物、その他も含むことが意図されている。ここで用いられる“SPS信号”という用語は、擬似衛星あるいは擬似衛星の均等物からの、SPS的な信号も含むことが意図されている。
【0020】
ここで用いられる移動局(MS)は、時折変化する位置あるいは場所を持つデバイスを参照している。位置および/または場所の変化の例としては、方向、距離、オリエンテーションなどの変化がある。特定の例では、移動局は、セルラ電話、無線通信デバイス、ユーザ機器、ラップトップコンピュータ、パーソナルナビゲーションデバイス(PND)、パーソナルマルチメディアプレーヤ(PMP)、他のパーソナル通信システム(PCS)、および/または他の携帯通信デバイスを含むことができる。移動局は、機械読取可能な情報により制御される機能を実行するような、プロセサおよび/または計算プラットフォームを含むこともできる。
【0021】
上述したように、計測を行うためのマルチセンサの利用は、これらデバイスのユーザに多くのチャレンジを提示できる。このようなチャレンジには、例えば、マルチセンサの消費電力、接続性、インターフェース、コスト、サイズを含むことができる。これらの争点に取り掛かるために、ここに述べられた技術は、単一デバイス内に2以上のセンサを集積することを含むことができる。このようなデバイスは、例えば移動局内のコンポーネントを含んでいてもよい。
【0022】
ここに記載される技術は、前述したような広汎なアプリケーションをサポートするために、例えばマルチセンサ計測処理ユニット(MSMPU)をインプリメントすることができる。とはいえ、クレームされた主題の範囲はこれらの特定アプリケーションに限定されることはない。1つの局面において、MSMPUは、次のものを提供することによって、これらのアプリケーションをサポートすることができる。ここで提供するものとは、内部および/または外部コンポーネント(外部接続されたアクセス可能なセンサを含む)、および/または、生および/または前処理されたセンサデータの外部プロセサへの通信における、望ましい信号の振幅、コンディション、計測収集、計測前処理、パワー管理である。外部プロセサは、例えば、移動局(MS)あるいは任意のその他のプロセサを含むことができる。
【0023】
図1は、プロセサを含むことができ、MSモデム(MSM)110に接続されたMSMPU100の例を示すブロック図である。この例では、MSMPU100は一対のセンサ130および140を含んでいる。この例は、ローカルプロセサ120も含んでいる。センサ130および/またはセンサ140は、それらに限定されるわけではないが、加速度計、ジャイロスコープ、地磁気センサ、圧力センサ、生体医用センサ、および温度センサなどを含む、広汎なセンサタイプのうちの任意のものを含むことができる。1つの局面において、ローカルプロセサ120は、例えば回路構成を含むことができ、および/またはパワー管理プログラムを実行することができる。センサ130および140は、1つまたは双方のセンサ内における電力消費を選択的に制御するために、パワー管理システムの制御下で、パワーステージ間を遷移することができる。例えば、センサ130は“オフ”または“スリープモード”に置くことができ、そこではセンサは殆どあるいは全く電力を消費しない。センサ140は、恐らくは機能性が制限された状態で、ローパワーモード下で動作できる。センサ140は、あるポイントにおいて、トリガイベントを検出できる。センサ140がトリガイベントを検出すると、ローカルプロセサ120は、センサ130をオンし、センサ140を通常動作モードに置くこともできる。一方、他の局面において、センサ130が“オフ”あるいは“ローパワーモード”状態に置かれることができる間は、センサ140は通常動作モードで動作することができる。センサ140がトリガイベントを検出すると、ローカルプロセサ120はセンサ130をオンしてそれも通常動作モードに置くことができる。
【0024】
1つの局面において、パワー管理システムは、ローカルプロセサ120内に専用ロジックを含むことができる。専用ロジックは、種々な内部および/または外部コンポーネントに対して、パワーのオン/オフ、省電力動作、および/またはスリープモードの管理を行うことができる。例えば、専用ロジックは、センサ130および140に対してパワー管理を提供できる。他の局面においては、パワー管理システムは、ローカルプロセサ120上で実行可能なソフトウエアインストラクションの少なくとも一部として、インプリメントされてもよい。
【0025】
図2は、移動局内に設置された一対のセンサをパワー管理する処理の例を示すフロー図である。ブロック210において、第1センサはスリープモードあるいは“オフ”モードにあるが、これは第1センサが殆どあるいは全く電力を消費しないことを意味する。また、ブロック210において、第2センサはローパワーモードで動作している。ブロック220では、第2センサがトリガイベントを検出したか否かの決定を行うことができる。第2センサがトリガイベントを検出したことに応答して、計測活動を行うために、ブロック230において、第1センサを通常動作モードにおき、第2センサを通常動作モードにおくことができる。この2つのセンサは、計測活動が完了するまで通常動作モードのままにしておくことができる。ブロック240において、計測活動が完了していたならば、ブロック210において第1センサはオフされあるいは“スリープ”モードとされることができ、その間、第2センサはローパワーモードにおかれる。クレームされた主題に従った例は、ブロック210〜240の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図2のフロー図は、一対のセンサのパワー管理を行うための単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0026】
図3は、ローカルプロセサ320、メモリ360、パワー管理ユニット350、ジャイロスコープ330、加速度計340、および温度センサ335を含むMSMPU300の例を示すブロック図である。MSMPU300は、例えばMSM310などの外部プロセサに接続することができる。この例では、ジャイロスコープ330および/または加速度計340は、ローカルプロセサ320にアナログ信号を提供できるようになっている。MSMPUは、ジャイロスコープ330、加速度計340、および/またはその他のセンサからのアナログ信号をデジタル化するために、アナログからデジタルへのコンバータ(A/D)305を含むことができる。この例では、幾何学センサ370および気圧センサ380がMSMPU300に接続されている。1つの局面において、幾何学センサ370などの外部接続されたアナログセンサを処理するために、信号増幅および調整の回路構成を含むことができる。例示のMSMPU300ではローカルプロセサ320内にA/D305およびメモリ360が集積されるように記述されているが、A/D305およびメモリ360の1つあるいは両方がローカルプロセサ320内に集積されないような他の例も可能である。さらに、MSMPU300における特定の配列および構成は、単なる例に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0027】
この例では、幾何学センサ370はMSMPU300に集積されておらず、MSMPU300を組み込んだデバイス内の他の場所に配置されている。MSMPUから離れて幾何学センサを位置決めできることから、幾何学センサに柔軟な配置を許容できるようになる。従い、このような幾何学センサの配置の柔軟性は、例えば電磁干渉および/または温度の影響を減らすにあたり、形状係数(form factor)の設計および配置においてより大きな柔軟性をもたらすことができる。
【0028】
1つの局面において、外部センサ370および/または380、そしてMSM310は、これに限定するものではないが、I2Cおよび/またはSPIインターコネクトを含む広汎な内部接続タイプのいずれかを介して、MSMPU300に接続することができる。もちろん、これは内部接続タイプの例に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0029】
他の局面では、MSMPU300は、MSM310あるいはその他のコンポーネントに接続されるインタラプトピンがインプリメントされたものでもよい。MSMPU300は、一例では、ラッチされたインタラプトモードにおいてインタラプト信号を操作するものとすることができる。さらに、MSMPU300は、インタラプトピンを設定するために内部プログラマブルスレショルドと専用回路構成を組み込んだものでもよい。しかしながら、これらはインタラプト信号をどのようにしてインプリメントできるのかの単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0030】
他の局面では、MSMPU300は、MSM310あるいはその他のコンポーネントに接続された少なくとも1つの汎用プログラマブルIOピン(GPIO)をインプリメントできる。MSMPU300は、このGPIOピンを、例えば、接続されたコンポーネントのパワーがオンおよびオフするように動作させることができる。
【0031】
他の局面では、パワー管理ユニット350は、ジャイロスコープ330および加速度計340にパワー制御信号を提供することができる。パワー管理ユニット350は、専用回路構成としてインプリメントすることができ、あるいは、メモリ360内に格納されローカルプロセサ320により実行されるソフトウエアおよび/またはファームウエアとしてインプリメントすることができる。
【0032】
一例として、加速度計340がローパワーモードで動作している間、ジャイロスコープ330はオフされてもよい。ローパワーモードにある間、加速度計340は、MSMPU300を組み込んだデバイスの動きを検出するよう動作できる。動きが検出されると、加速度計340は通常動作モードに入ることができ、ジャイロスコープ330もパワーオンされて通常動作モードに入ることができる。1つの局面において、センサ330および340の各々、そして、幾何学センサ370および気圧センサ380などインプリメントされた外部センサの幾つかについては、互いに独立して、パワーオンされ、スリープとされ、ローパワー動作モードとされ、および/または通常動作モードとされることができる。このようにして、パワー管理ユニット350は、広汎で可能なアプリケーション、状況、およびパフォーマンスの要求に渡って、電力消費高を調整することができる。他の局面では、MSMPU300は、ジャイロスコープ330および/または加速度計340に対してパワーの回復を早める処理をインプリメントできる。1つの例では、パワーを回復させる2以上の高速化処理(ウェイクアップモード)の1つを選択することができる。ここで、異なるモードは、ウェイクアップ時間と電流消費高の間で様々な折衷案を提示する。
【0033】
一例を挙げると、加速度計340の出力は、MSMPU300内あるいはMSMPU300を組み込んだデバイスの何処かに集積された他のセンサをオンさせるスイッチとして用いることができる。このような外部センサは、MSMPU300として同じ台上に組み込むことができ、あるいは、単一のシステム・イン・パッケージ(SIP)としてインプリメントすることができる。MSMPU300を組み込んだデバイスの外部に外部センサを設置することもできる。外部センサは、恐らくは、以降でさらに述べるように、無線内部接続を介して、あるいはその他のタイプの内部接続を介して、MSMPU300に遠隔接続される。
【0034】
他の局面では、MSMPU300内に集積されたセンサは、プログラマブルおよび/または選択可能な特性を持つことができる。例えば、加速度計340には、選択可能な“g”、一例を挙げれば恐らくは2ないし16g、のレベルをインプリメントできる。他の例を挙げれば、ジャイロスコープ330は、一例として恐らくは50ないし500deg/secの幅で、選択可能な角速度幅を持つことができる。しかしながら、これらの幅は加速度計340およびジャイロスコープ330に対する単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0035】
さらに他の局面では、MSMPU300は、計測データに対して選択可能な出力分解能を組み込むことができる。一例を挙げれば、ローパワー消費モードに対する7ビット、または通常動作モードに対する14ないし16ビットのいずれかの分解能を、選択することができる。さらに、MSMPUは、MSM310に対して選択可能なバンド幅で動作できる。一例を挙げれば、25ないし1500Hzの間でバンド幅を選択可能とすることができる。
【0036】
他の局面では、MSMPU300およびそれに付随するセンサは、ナビゲーションアプリケーションに用いられてもよい。加速度計340は、1以上の他のセンサに対するパワー管理機能をトリガするために2つのスレショルド(上と下)を超えるか下回るかその間にあるかのいずれかとしてMSMPU300を組み込んだデバイスの動き(加速度の変化)および/または傾斜角の変化を検出するよう、予めプログラムされ、および/または予め構成されることができる。このようにして、例えば、幾何学センサ370および/またはジャイロスコープ330および/または気圧センサ380および/またはカメラセンサ(図示せず)および/または、MSMPUを組み込んだあるいはMSMPUに遠隔接続されるデバイスに集積された他のセンサは、動きが検出されたら、ナビゲーションアプリケーションを実行するためにパワーオンされることが可能となる。同様に、動きが検出されない(デバイスが静止している)ときは、他のセンサのうちの任意のものあるいはその全てがスリープ、ローパワー、あるいはオフモードとなるように、加速度計の出力を用いることができ、これにより電力消費が減る。
【0037】
図4は、移動局内の、加速度計を含む2以上のセンサをパワー管理する処理例のフロー図である。ブロック410において、1以上のセンサがスリープモードにあるが、これはその1以上のセンサが殆どあるいは全く電力を消費しないことを意味する。また、ブロック410では加速度計はローパワーモードで動作することができる。ブロック420は、加速度計が動きを検出したら、ブロック430において、先にスリープモードに入っていた1以上のセンサが通常動作モードで動作するように目覚めることができることを、示している。加速度計はまた、恐らくはジャイロスコープおよび/または幾何学センサを含む1以上の他のセンサに関連して計測活動を行うようにするために、通常動作モードに入ることもできる。種々なセンサは、恐らくは一例としてのナビゲーション操作を含む計測活動が完了するまで、通常動作モードに留まることができる。計測活動が完了すると、ブロック440において、1以上のセンサはスリープモードに戻ることができ、加速度計はブロック410でローパワーモードに置かれることができる。クレームされた主題に従った例は、ブロック410〜440の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図4のフロー図は単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0038】
他の局面では、ジャイロスコープが衝撃破損から保護されるようジャイロスコープをパワーダウンさせるために、加速度計340を、MSMPUを組み込んだデバイス、恐らくは移動局、の自由落下状況を検出するために用いてもよい。この処理は、落下衝撃から保護するためにハードディスクのリード/ライトヘッドをパーキングさせる処理に類似しているといえる。
【0039】
前述したように、MSMPU300内にインプリメントされたパワー制御ロジックは、加速度計340およびジャイロスコープ330のような内部センサのパワーオンまたはオフもしくは動作モードの切り替えのみならず、幾何学センサ370および気圧センサ380のような外部センサのパワーオンまたはオフもしくは動作モードの切り替えも、行うことができる。他の局面では、パワー管理ユニット350を、例えばMSM310のような外部プロセサのパワーオンまたはオフもしくは動作モードの切り替えを行うように用いることもできる。さらに他の局面では、種々な内部および外部のセンサおよび/またはプロセサおよび/または他のコンポーネントに対する動作モード切り替えが有益となるであろう条件を決定する処理を、パワー管理ユニット350が実行するようにしてもよい。もちろん、これらはパワー管理ユニット350により実行できるパワー管理処理の単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0040】
他の例として、ローカルプロセサ320を、加速度計340およびジャイロスコープ330の少なくとも1つからの計測に基づく動きの検出に用いることができる。さらに、動き検出のイベントは、MSM310などの外部プロセサ上にあるインストラクションの実行を開始させることに用いることができる。
【0041】
図5は、移動局モデム(MSM)510に接続されたMSMPU500の例を示すブロック図である。一例として、MSMPU500およびMSM510を移動局に組み込むことができる。MSMPU500は、ローカルプロセサ520、メモリ560、パワー管理ユニット550、ジャイロスコープ530、加速度計540、および温度センサ535を含むことができる。一例では、ジャイロスコープ530および/または加速度計540はローカルプロセサ520にアナログ信号を提供することができる。MSMPUは、ジャイロスコープ530、加速度計540、および/または他のセンサからのアナログ信号を変換する、アナログからデジタルへのコンバータ(A/D)505を含むことができる。ある局面では、パワー管理ユニット550は、ジャイロスコープ530および加速度計540にパワー制御信号を提供することができる。パワー管理ユニット550は、専用回路構成によりインプリメントされることができ、あるいは、メモリ560内に格納されローカルプロセサ520により実行されるソフトウエアおよび/またはファームウエアとしてインプリメントされることができる。この例では、MSMPU500はさらに、気圧センサ580および幾何学センサ570へ接続することができ、ホイールティック走行距離計信号585および外部クロック信号587を受信することもできる。しかしながら、これはMSMPUの構成とそれに付随するセンサおよび信号の単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0042】
また、この例では、MSMPUは、センサから、および/またはローカルプロセサ520から、および/またはMSM510などの外部プロセサからのデータを格納するような1以上のバッファを含むことができる。図5に描かれた例では、MSMPU500は、生データバッファ522および処理データバッファ524を含むことができる。バッファ522および/または524によりもたらされるバッファリング能力は、MSMPU500内に含まれおよび/または接続される種々なコンポーネントにより生成されている種々な計測のために、用いることができる。例えば、1以上のセンサから得られる計測のレートは、これらの計測がプロセサ520により処理されるか、および/または、一例として恐らくはMSM510となるであろう外部プロセサなどの外部コンポーネントへ送信される際のレートと、異なっていてもよい。さらに、1以上のセンサからの計測データは、そのデータをMSM510あるいは他のコンポーネントへバースト状に送信するために、1以上のバッファ内に集められてもよい。他の局面では、生データバッファ522はデータをその生のままの形態(1以上のセンサから引き渡されたままとして)で格納することに使用でき、また、処理データバッファはローカルプロセサ520あるいはMSM510などの外部プロセサのいずれかにより何らかの方法で処理されたデータのために使用することができる。このような処理は、フィルタリング、アベレージング、サブサンプリング、アウトライアー検出、および/または、時のインスタンス(instance of time)を1以上の計測に提携させるデータのタイムサンプリングのうちの、任意のタイプを含むことができる。もちろん、ここに記載されるバッファリング技術は単なる技術例に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0043】
さらに他の局面は、例えばバッファ522またはバッファ524のいずれかなどのバッファ内に計測を格納することによる、あるいは例えばメモリ560などのメモリ内に計測を格納することによる、種々なセンサ計測のタイムサンプリングを含むことができる。計測データには、その計測データを例えばMSM510などの外部コンポーネントへ送信する際に、タイムスタンプすることができる。このタイムスタンプは、一例では、外部クロック信号587より受け取ったクロック信号に基づいて行うことができる。例えば、外部クロック信号587は、種々な普通のクリスタルのいずれか、例えば32KHzクリスタルによって、発生することができる。外部クロック信号は、ローカルプロセサを走らせるために必要なより高い周波数信号を合成するために、ローカルフェイズロックループ(PLL)回路で用いられてもよい。
【0044】
他の局面では、一例として恐らくは毎秒1パルスの周期的な時間基準パルスを、MSMPU500がMSM510あるいは他の外部プロセサから受け取ってもよい。ここで、外部プロセサは、SPSにより、あるいは協定世界時(UTC)標準により、もしくはその他の知られたシステム時間によって提供されるような基準時間標準にアクセスするものである。バッファデータは、このようなシステム時間情報から引き出される情報、例えばSPSから引き出される時間情報でもって、タイムスタンプされることができる。このようにして、ナビゲーションアプリケーションのためのSPS衛星計測のような、他のタイムスタンプされたデータとセンサデータの組合せを有効化できる基準時間に、タイムスタンプを同期させることができる。他の局面では、外部プロセサ(例えばセンサ情報に対するクライアント)は、センサデータに対する計測期間を定義するために、開始および停止時間のようなタイミング情報を提供することができる。ナビゲーションアプリケーションにおいては、これら開始および停止時間は、シーケンシャルなSPS計測時間タグに対応することができ、センサデータを受信したSPSデータに同期させることに使用できる。計測期間を定義するためにSPS時間タグを用いることは、単なる1つの技術例である。他の例では、多くの異なるソースからの時間タグが計測時間の期間を定義することに使用できる。
【0045】
図6は、計測データをタイムサンプリングする処理例を示すフロー図である。ブロック610において、1以上のセンサからの計測データは移動局内のバッファに格納することができる。ここで、移動局は1以上のセンサを含んでいる。ブロック620において、格納された計測データは、衛星位置決めシステムあるいはその他の一般的な基準システムから引き出される時間情報でもって、タイムスタンプされることができる。クレームされた主題に従った例は、ブロック610〜620の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図6のフロー図は単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0046】
他の局面において、外部クロック587を介して、あるいはSPSまたは他の時間パルスソースを介して受信されるような周期的な時間基準パルス信号は、バッファ522および/または524からあるいはメモリ560からMSM510などの外部コンポーネントへのセンサデータ送信を開始するのに、用いることができる。例えば、MSMPU500は、所定のプロセスに従いセンサ計測を処理でき、センサデータをバッファ522および524の1つもしくは両方、またはメモリ560内のいずれかに格納でき、そして、センサデータを送信できる。この送信は、周期的な時間基準信号の受信に応答して行うことができる。あるいは、例えばMSM510などの外部コンポーネントからの、またはMSM510と通信中のデバイスからの“受信準備できました”というメッセージの受信に応答して、行うことができる。
【0047】
他の例では、送信の開始は、I2C、SPI、UART、パラレルポート、その他の一般的なI/O周辺機器あるいはインターフェースからの“受信準備できました”メッセージの受信により、トリガされてもよい。同じ周辺機器および/またはインターフェースは、計測タイムスタンピングおよび/またはMSMPU500とMSM510などの外部コンポーネントとの間の同期維持のために、MSMPU500へ外部時間情報を提供することに使用されてもよい。
【0048】
他の局面では、MSMPU500内に集積されるか、および/またはMSMPU500に外部接続されるかのいずれかのセンサを較正するために、回路構成および/またはソフトウエアを提供することができる。MSM510などの外部プロセサがナビゲーションアプリケーションの実行に用いられるときは、そのナビゲーションアプリケーションは、移動局などのオブジェクトに付随する1以上の状態を評価することができる。ここで、1以上の状態は、それに限定されるわけではないが、地理的な場所、標高、速度、機首方位、および/またはオリエンテーションなどを含むことができる。1以上の評価された状態は、移動局に組み込まれたセンサの種々なパラメータを較正することに使用できる情報を、提供することができる。これらのパラメータの例としては、加速度計バイアス、ドリフト、温度の関数としてのバイアス、温度の関数としてのドリフト、温度の関数としての計測ノイズ、温度の関数としての感度、センサがボードに設置(マウント)された結果あるいはエージングの結果としてのパラメータのいずれかにおける変動、その他がある。しかしながら、これらは較正できるパラメータの単なる例示に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0049】
図7は、センサを較正する処理例のフロー図である。710において、移動局の位置、速度、および標高のうちの少なくとも1つにおける変化は、移動局に集積された1以上のセンサを用いて計測できる。位置の変化は、例えば移動局が動き回る方向および/または距離の計測によって、計測することができる。移動局の位置変化は、720において、衛星位置決めシステムからの情報を用いて計測できる。730において、誤差値を算出することができる。この誤差値は、1以上のセンサにより得られた計測と、衛星位置決めシステムにより得られた計測との間の違いを示している。740において、1以上のセンサは、誤差値の少なくとも一部に基づいて較正されることができる。クレームされた主題に従った例は、ブロック710〜740の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図7のフロー図はセンサを較正するための単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0050】
他の局面では、MSMPU500を組み込んだデバイスが静止していることを決定できるように、回路構成および/またはソフトウエアおよび/またはファームウエアを提供できる。この決定は、ローカルプロセサ520上で実行されるソフトウエアおよび/またはファームウエアにより行うことができ、あるいは外部入力から提供することができる。例えば、ホイールティック走行距離計入力信号585は静止状態を示すことができる。1つの局面において、ホイールティック走行距離計入力信号585は、センサ較正処理内で用いることができる。他の局面では、静止状態は、ジャイロスコープ530および/または気圧センサ580を較正することに用いることができる。MSMPU500を組み込んだデバイスが静止していることが分かっているときは、気圧の何らかの変化は、標高の変化ではなくて、気圧に実際の変動がもたらされたものとすることができる。
【0051】
さらなる局面においては、MSMPUは、例えば、セルホン、パーソナルデジタルアシスタンス、ノートブックコンピュータ、その他を含む広汎なデバイスの、いずれかに組み込むことができる。このようなデバイスは、時折、クレードルあるいはドッキングステーションに設置されることがある。一例において、このようなデバイスがクレードルあるいはドッキングステーションに設置されるときは、そのデバイスは静止している。MSMPU500は、このようなデバイスがクレードルあるいはドッキングステーションに設置されそのデバイスが静止していることを推定する指示を、検知しまたは受信することができる。一例では、この静止状態の指示は、前述したような較正動作を行う際に利用できる。他の局面では、MSMPU500は、静止状態からの遷移を、例えば動き検出を通じて、検出できる。
【0052】
付加的な局面では、温度センサ535は、温度の関数としてセンサパフォーマンス特性を発展させるために、較正動作の実行において使用できる温度計測を提供することができる。1つの例では、温度の関数としての加速度計ドリフト値のテーブルを探知してメモリ560内に格納することができる。センサ較正データ(バイアスおよびドリフトなど)は、センサデータ修正のためにMSMPU500に提供できる。較正データで生のセンサデータを修正することは、種々なアプリケーションの可能性をもたらすことができる。このアプリケーションには、それに限定するものではないが、推測航法(dead-reckoning)アプリケーションに対する動き検出と動き統合が含まれる。推測航法(DR)は、自身の現在位置と、既知あるいは計測された速度、時間経過、および機首方位に基づく位置の前進を評価する処理を、参照することができる。
【0053】
他の局面では、幾何学センサ570からのデータは、ジャイロスコープ530バイアスを較正することに使用でき、さらに、この幾何学センサにより示される絶対機首方位を初期化することにも使用できる。よりよい方向情報を提供するために、加速度計540からの横揺れおよび縦揺れ計測を用いて幾何学センサ570の傾き補償をすることは、有益といえる。傾き補償処理は、MSMPU500内にある専用回路構成によりインプリメントすることができ、および/または、ローカルプロセサ520および/またはMSMPU500により実行できるソフトウエアおよび/またはファームウエア内にインプリメントすることができる。この傾き補償処理は、外部接続された幾何学センサ570から受信する計測データを利用することができる。幾何学センサ570内に集積されるか幾何学センサ570の近傍に設置されるかのいずれかの他の温度センサから、あるいは温度センサ535からのデータを組み込むこともまた、有益であるといえる。他の局面では、角度情報内の変化を計測する幾何学センサ570からの、シーケンシャルな、および/または周期的な、および/またはイベントトリガされた計測を用いて、ジャイロスコープ530を較正してもよい。
【0054】
さらに他の局面では、MSMPU500は、動き回りの距離および方向(例えば動きの軌道または経路)の変化を決定するために、加速度計540およびジャイロスコープ530からの計測を組み込むことにより動きの統合(motion integration)を行うことができる。この局面は、MSMPU500を組み込んだオブジェクトが関心のある領域を出たか入ったかを決定することが望ましい、土地囲いアプリケーション(geo-fencing applications)で有利に用いられることができる。この関心のある領域は、例えば、プリセットされおよび/またはプログラマブルな半径を持つ円として定義することができるが、これは関心のある領域をどのように定義することができるかの例に過ぎず、クレームされた主題の範囲はそれに限定されない。
【0055】
図8は、土地囲いアプリケーションの例を示すフロー図である。ブロック810において、移動局に対するスタート位置を確定することができる。ブロック820において、移動局に対する位置変化は、加速度計とジャイロスコープのセンサデータを用いて決定できる。この位置変化は、例えば、当業者にとっては周知の技術を用いて移動局に対する動き回りの方向および/または距離を検出することにより、検出することができる。ブロック830では、移動局が特定領域を出たか入ったかに関する決定を行うことができる。クレームされた主題に従った例は、ブロック810〜830の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図8のフロー図は土地囲いのための単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0056】
図9は、加速度計540およびジャイロスコープ530の双方からの情報を組み合わせる処理例のフロー図である。このような情報は動き統合および回転のデータを含むことができ、このような情報は土地囲いおよび/またはナビゲーションDRの動作をサポートするために利用することができる。通常、ジャイロスコープ530からの情報は、移動局のオリエンテーションが三次元空間内でオリジナルのオリエンテーションからどのくらい回転したかを計算することに用いることができる。その結果としての回転マトリクスは、加速度計が計測期間の始めにあったときの計測フレーム(オリジナルオリエンテーション)へ加速度計情報を変換し戻すことに使用できる。これらの“回転”計測は、その計測は全て同じオリエンテーションに基づくものなので、正味の変位(net displacement)を決定するためにそれ以前の計測に加算することができる。とくに、この例示技術では、ブロック905において、例えばジャイロスコープ530などのジャイロスコープから、データを獲得できる。ブロック910では3x3マトリクスを創作でき、ブロック925では個別の横揺れ、縦揺れ、および偏揺れ (機首方位)の値を合計することができる。ブロック910からのマトリクスは、回転を累積するためにブロック915において乗算されることができる。第1の回転マトリクスで乗算されたマトリクスは同定することができる。ブロック920では、インターバルのスタートまでサンプルが回転して戻るように、そのマトリクスは反転されることができる。そして処理はブロック940へ進むことができる。ブロック930では加速度計データ(x, y, z)を獲得することができ、ブロック935では3x1ベクトルを創作できる。ブロック940において、ブロック920からの反転マトリクスは、スタート点に戻るようにサンプルポイントを回転させることに使用できる。ブロック945では、同じリファレンスフレーム内からの個別フレームを合計することができる。ブロック950では、(ジャイロスコープ計測からの)累積された回転と、(加速度計計測からの)動き回り距離を、組み合わせることができる。クレームされた主題に従った例は、ブロック905〜950の全て、あるいはそれ以上、もしくはそれ以下を含むことができる。さらに、図9のフロー図は加速装置およびジャイロスコープの計測を組み合わせるための単なる例示技術に過ぎず、クレームされた主題はそれに限定されない。
【0057】
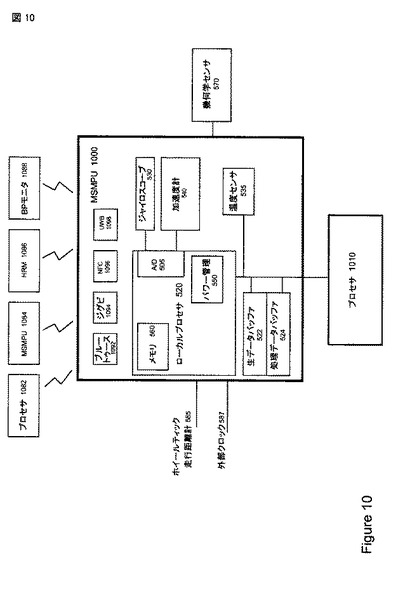
図10は、無線接続性を備えたMSMPU1000の例を示すブロック図である。MSMPUは、図3および図5に関連して前述した技術と同様なものを含むことができる。無線接続性は、将来の技術を含め、広汎な無線技術のいずれかにより実現できる。このような無線技術のごく少数の例として、ブルートゥース(Bluetooth(登録商標))、ジグビ(ZigBee(登録商標))、近接通信(Near field Communication)(NFC)、およびウルトラワイドバンド(Ultra Wide Band)(UWB)があるが、クレームされた主題の範囲はそれに限定されない。図10では、これらの技術は、無線通信ユニット1092、1094、0196、および1098で示されている。無線接続性を付加することにより、例えばマルチプレーヤゲームのような仲間同士のアプリケーションのために、MSMPU1000を集積したデバイスは、やはりMSMPU1084を含んだ他のデバイスと通信することができる。MSMPU1000はまた、プロセサ1082へ生のセンサ計測、処理されたセンサ計測、任意の程度(これは集積されまたは接続されたセンサの有効性および動作状況に依存するが)の位置(x,y,z)および/または標高(τ,φ,ψ)の情報、位置および/または標高の情報の変化、オイラー角(Euler angles)、四元数(quaternion)、テレメトリデータ、その他を提供するために、外部プロセサ1082と通信することもできる。
【0058】
他の局面では、MSMPU100は、無線技術のいずれかを介して、例えば心拍レートモニタ(HRM)1086および/または血圧(BP)モニタ1088のような1以上の生体医用センサと通信することができる。これらのセンサは、例えば医療および/またはフィットネス/アスレチックの分野のアプリケーションに見ることができる。
【0059】
内部および/または外部のセンサから集めた情報は、ナビゲーション解(navigational solution)および/またはユーザインターフェースおよび/またはゲーム制御信号、カメラ画像安定化信号、その他を得るために、外部プロセサ1082により用いられることができる。他の例では、他のプレーヤに対するあるプレーヤの位置変化あるいは高さ変化もしくは活動を知ることが望ましいマルチプレーヤゲーム環境内で用いることができる相対位置のおよび/または標高の情報を得るために、少なくとも1つのMSMPUからのデータを中央演算ユニットに提供することができる。
【0060】
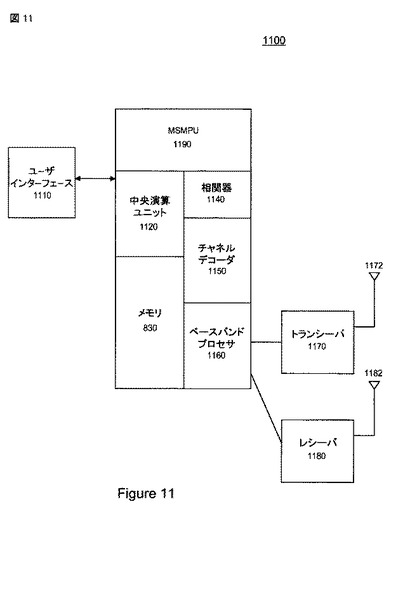
図11は、移動局1100の例のブロック図である。無線トランシーバ1170は、音声あるいはデータなどのベースバンド情報でRFキャリア信号を変調してRFキャリアに乗せ、このようなベースバンド情報を得るために変調されたRFキャリアを復調することに、用いることができる。アンテナ1172は、変調されたRFキャリアを無線通信リンク上に送信し、無線通信リンク上の変調されたRFキャリアを受信することに、用いることができる。
【0061】
ベースバンドプロセサ1160は、無線通信リンク上への送信のために、中央演算ユニット(CPU)1120からのベースバンド情報をトランシーバ1170へ提供することに用いることができる。ここで、CPU1120は、ユーザインターフェース1110内の入力デバイスからこのようなベースバンド情報を得ることができる。ベースバンドプロセサ1160は、ユーザインターフェース1110内の出力デバイスを介して送信を行うために、トランシーバ1170からのベースバンド情報をCPU1120へ提供することに用いることができる。
【0062】
ユーザインターフェース1110は、音声あるいはデータのようなユーザ情報を入力しあるいは出力するためのデバイスを複数含むことができる。このようなデバイスには、非限定的な例として、キーボード、表示スクリーン、マイクロホン、およびスピーカがある。
【0063】
レシーバ1180は、SPSからの送信を受信し復調し、そして相関器1140へ復調された情報を提供することに用いることができる。相関器1140は、レシーバ1180により提供された情報から相関関数を得ることに用いることができる。相関器1140はまた、トランシーバ1170により提供されたパイロット信号に関係する情報からパイロット関連の相関関数(pilot-related correlation functions)を得ることに用いることができる。この情報は、無線通信サービスを得るために移動局で用いられることができる。チャネルデコーダ1150は、ベースバンドプロセサ1160から受け取ったチャネルシンボルを根元的なソースビットにデコードすることに用いることができる。チャネルシンボルが回旋的にエンコードされたシンボルを含むような例において、このようなチャネルデコーダは、ビタビデコーダ(Viterbi decoder)を含むことができる。チャネルシンボルがシリアルまたはパラレルな回旋的コードの連鎖を含むような第2の例では、チャネルデコーダ1150はターボデコーダ(turbo decoder)を含むことができる。
【0064】
メモリ1130は、ここで記述されあるいは示唆された1以上の処理、インプリメンテーション、あるいは例示を行うために実行可能な、機械読取可能なインストラクションを格納することに、用いることができる。CPU1120は、このような機械読取可能なインストラクションにアクセスして実行することに用いることができる。
【0065】
移動局1100は、例えば、MSMPU1190を備えることができる。MSMPU1190は、ここに述べられたセンサ計測および/またはパワー管理動作のいずれでも、あるいはその全てを行うように、用いることができる。例えば、MSMPU1190は、図1〜10に関連して前述した機能を行うことに使用できる。
【0066】
何が現在例示的特徴として考慮されているかを図示し記述してきたが、クレームされた主題から離れることなく、種々な他の変形がなされてもよく、また均等物が差し替えられてもよいことは、当業者にとって理解されるであろう。加えて、ここに述べられた中心的なコンセプトから離れることなく、クレームされた主題が教示することへの特定の状況に、
多くの変形が適用されてもよい。従い、クレームされた主題は、個々に開示された特定の例に限定されるものではなく、このようなクレームされた主題が添付された請求項の範囲内に入る全ての局面とその均等物を含むことが意図されている。
【特許請求の範囲】
【請求項1】
デバイス内に配置された第1センサからの信号の受信に応答してデバイスの動きを検出し;
前記動きの検出に応答して、前記デバイス内に配置された第2センサのパワー状況を変化させる
ことを備えた方法。
【請求項2】
前記動きの検出は、前記デバイス内に配置された加速度計からの信号の受信に応答して前記デバイスの動きを検出することを含む請求項1に記載の方法。
【請求項3】
前記第2センサのパワー状況の前記変化は、前記動きの検出に応答して前記デバイス内に配置されたジャイロスコープのパワー状況を変化させることを含む請求項1に記載の方法。
【請求項4】
前記第2センサのパワー状況の前記変化は、前記第2センサのパワー状況がスリープモードから通常動作モードへ変化することを含む請求項1に記載の方法。
【請求項5】
前記第2センサのパワー状況の前記変化は、前記第2センサのパワーダウンを含む請求項1に記載の方法。
【請求項6】
前記第1センサからの信号の受信に応答して前記第1センサのパワー状況を変化させることをさらに備えた請求項1に記載の方法。
【請求項7】
前記第1センサのパワー状況の前記変化は、前記第1センサのパワー状況がローパワーモードから通常動作モードへ変化することを含む請求項5に記載の方法。
【請求項8】
移動局が1以上のセンサを備える場合において、移動局内のバッファ内にある1以上のセンサからの計測データを格納し;
衛星位置決めシステムから求めた時間情報で、格納された前記計測データにタイムスタンプをする
ことを備えた方法。
【請求項9】
前記格納された計測データに対する前記タイムスタンプは、衛星航法システムから求めた時間情報でもって前記格納された計測データにタイムスタンプすることを含む請求項8に記載の方法。
【請求項10】
前記格納された計測データに対する前記タイムスタンプは、ガリレオ衛星位置決めシステムから求めた時間情報でもって前記格納された計測データにタイムスタンプすることを含む請求項8に記載の方法。
【請求項11】
前記衛星位置決めシステムから求めた時間情報を、外部プロセサから受信することをさらに備えた請求項8に記載の方法。
【請求項12】
計測動作を行うために、前記格納された計測データを他のタイムスタンプされたデータと組み合わせることをさらに備えた請求項8に記載の方法。
【請求項13】
前記格納された計測データを他のタイムスタンプされたデータと組み合わせることは、ナビゲーション操作を行うために前記格納された計測データを衛星位置決めシステムからのタイムスタンプされたデータと組み合わせることを含む請求項12に記載の方法。
【請求項14】
移動局のスタート位置を確定し;
前記移動局内に加速度計および/またはジャイロスコープが配置されている場合において、この加速度計および/またはジャイロスコープからのセンサデータを用いて前記スタート位置に対する前記移動局の位置変化を検出し;
前記検出された変化の少なくとも一部に基づいて、前記移動局が特定領域を出たのかあるいは入ったのかを決定する
ことを備えた方法。
【請求項15】
前記移動局の位置変化の検出は、前記移動局が動き回る方向および距離を検出することを含む請求項14に記載の方法。
【請求項16】
前記特定領域は、特定半径内の円で定義される請求項14に記載の方法。
【請求項17】
前記特定半径はプログラム可能な値をもつ請求項16に記載の方法。
【請求項18】
マルチセンサ計測処理ユニットに集積された加速度計と;
前記マルチセンサ計測処理ユニットの外部に置かれこのマルチセンサ計測処理ユニットに接続された幾何学センサを備え、前記マルチセンサ処理ユニットが、前記加速度計および前記幾何学センサからのセンサデータの少なくとも一部に基づいて動きを検出することに用いられる
移動局。
【請求項19】
マルチセンサ処理ユニットが、前記加速度計からのセンサデータの少なくとも一部に基づいて前記幾何学センサを補償することに用いられる請求項18に記載の移動局。
【請求項20】
前記加速度計からのセンサデータは、横揺れおよび縦揺れの計測データを含む請求項19に記載の移動局。
【請求項21】
前記マルチセンサ計測処理ユニットに接続されたジャイロスコープをさらに備え、前記マルチセンサ計測処理ユニットが、前記幾何学センサからの計測データの少なくとも一部に基づいて前記ジャイロスコープを較正することに用いられる請求項20に記載の移動局。
【請求項22】
移動局に集積された1以上のセンサを用いてこの移動局の位置の変化を計測し;
衛星位置決めシステムからの情報を用いて前記移動局の位置の変化を計測し;
前記1以上のセンサにより得られた計測と前記衛星位置決めシステムを用いて得られた計測との間の違いを示す誤差値を算出し;
前記誤差値の少なくとも一部に基づいて前記1以上のセンサを較正する
ことを備えた方法。
【請求項23】
前記1以上のセンサを用いた位置変化の計測は、前記移動局が動き回る方向および/または距離を計測することを含む請求項22に記載の方法。
【請求項24】
前記衛星位置決めシステムからの情報を用いた位置変化の計測は、前記移動局が動き回る方向および/または距離を計測することを含む請求項22に記載の方法。
【請求項25】
前記衛星位置決めシステムからの情報は衛星航法システムからの情報を含む請求項22に記載の方法。
【請求項26】
前記衛星位置決めシステムからの情報はガリレオ衛星位置決めシステムからの情報を含む請求項22に記載の方法。
【請求項27】
プロセサと;
前記プロセサに接続される1以上のセンサと;
前記プロセサに接続される無線インターフェースユニットを備え、この無線インターフェースユニットは無線内部接続を介して外部センサからの計測情報を受信することに用いられ、前記プロセサは前記計測情報に基づいて1以上のナビゲーション状態を評価することに用いられる
マルチセンサ計測処理ユニット。
【請求項28】
前記無線インターフェースユニットは外部の生体医用センサからの計測情報を受信することに用いられる請求項27に記載のマルチセンサ計測処理ユニット。
【請求項29】
前記生体医用センサは心拍レートモニタを含む請求項28に記載のマルチセンサ計測処理ユニット。
【請求項30】
前記生体医用センサは血圧モニタを含む請求項28に記載のマルチセンサ計測処理ユニット。
【請求項31】
前記無線内部接続は実質的にブルートゥース規格に従ってインプリメントされた内部接続を持つ請求項27に記載のマルチセンサ計測処理ユニット。
【請求項32】
前記無線内部接続は実質的に近接通信規格に従ってインプリメントされた内部接続を持つ請求項27に記載のマルチセンサ計測処理ユニット。
【請求項33】
前記無線インターフェースユニットは外部プロセサからの計測情報を受信することに用いられる請求項27に記載のマルチセンサ計測処理ユニット。
【請求項1】
デバイス内に配置された第1センサからの信号の受信に応答してデバイスの動きを検出し;
前記動きの検出に応答して、前記デバイス内に配置された第2センサのパワー状況を変化させる
ことを備えた方法。
【請求項2】
前記動きの検出は、前記デバイス内に配置された加速度計からの信号の受信に応答して前記デバイスの動きを検出することを含む請求項1に記載の方法。
【請求項3】
前記第2センサのパワー状況の前記変化は、前記動きの検出に応答して前記デバイス内に配置されたジャイロスコープのパワー状況を変化させることを含む請求項1に記載の方法。
【請求項4】
前記第2センサのパワー状況の前記変化は、前記第2センサのパワー状況がスリープモードから通常動作モードへ変化することを含む請求項1に記載の方法。
【請求項5】
前記第2センサのパワー状況の前記変化は、前記第2センサのパワーダウンを含む請求項1に記載の方法。
【請求項6】
前記第1センサからの信号の受信に応答して前記第1センサのパワー状況を変化させることをさらに備えた請求項1に記載の方法。
【請求項7】
前記第1センサのパワー状況の前記変化は、前記第1センサのパワー状況がローパワーモードから通常動作モードへ変化することを含む請求項5に記載の方法。
【請求項8】
移動局が1以上のセンサを備える場合において、移動局内のバッファ内にある1以上のセンサからの計測データを格納し;
衛星位置決めシステムから求めた時間情報で、格納された前記計測データにタイムスタンプをする
ことを備えた方法。
【請求項9】
前記格納された計測データに対する前記タイムスタンプは、衛星航法システムから求めた時間情報でもって前記格納された計測データにタイムスタンプすることを含む請求項8に記載の方法。
【請求項10】
前記格納された計測データに対する前記タイムスタンプは、ガリレオ衛星位置決めシステムから求めた時間情報でもって前記格納された計測データにタイムスタンプすることを含む請求項8に記載の方法。
【請求項11】
前記衛星位置決めシステムから求めた時間情報を、外部プロセサから受信することをさらに備えた請求項8に記載の方法。
【請求項12】
計測動作を行うために、前記格納された計測データを他のタイムスタンプされたデータと組み合わせることをさらに備えた請求項8に記載の方法。
【請求項13】
前記格納された計測データを他のタイムスタンプされたデータと組み合わせることは、ナビゲーション操作を行うために前記格納された計測データを衛星位置決めシステムからのタイムスタンプされたデータと組み合わせることを含む請求項12に記載の方法。
【請求項14】
移動局のスタート位置を確定し;
前記移動局内に加速度計および/またはジャイロスコープが配置されている場合において、この加速度計および/またはジャイロスコープからのセンサデータを用いて前記スタート位置に対する前記移動局の位置変化を検出し;
前記検出された変化の少なくとも一部に基づいて、前記移動局が特定領域を出たのかあるいは入ったのかを決定する
ことを備えた方法。
【請求項15】
前記移動局の位置変化の検出は、前記移動局が動き回る方向および距離を検出することを含む請求項14に記載の方法。
【請求項16】
前記特定領域は、特定半径内の円で定義される請求項14に記載の方法。
【請求項17】
前記特定半径はプログラム可能な値をもつ請求項16に記載の方法。
【請求項18】
マルチセンサ計測処理ユニットに集積された加速度計と;
前記マルチセンサ計測処理ユニットの外部に置かれこのマルチセンサ計測処理ユニットに接続された幾何学センサを備え、前記マルチセンサ処理ユニットが、前記加速度計および前記幾何学センサからのセンサデータの少なくとも一部に基づいて動きを検出することに用いられる
移動局。
【請求項19】
マルチセンサ処理ユニットが、前記加速度計からのセンサデータの少なくとも一部に基づいて前記幾何学センサを補償することに用いられる請求項18に記載の移動局。
【請求項20】
前記加速度計からのセンサデータは、横揺れおよび縦揺れの計測データを含む請求項19に記載の移動局。
【請求項21】
前記マルチセンサ計測処理ユニットに接続されたジャイロスコープをさらに備え、前記マルチセンサ計測処理ユニットが、前記幾何学センサからの計測データの少なくとも一部に基づいて前記ジャイロスコープを較正することに用いられる請求項20に記載の移動局。
【請求項22】
移動局に集積された1以上のセンサを用いてこの移動局の位置の変化を計測し;
衛星位置決めシステムからの情報を用いて前記移動局の位置の変化を計測し;
前記1以上のセンサにより得られた計測と前記衛星位置決めシステムを用いて得られた計測との間の違いを示す誤差値を算出し;
前記誤差値の少なくとも一部に基づいて前記1以上のセンサを較正する
ことを備えた方法。
【請求項23】
前記1以上のセンサを用いた位置変化の計測は、前記移動局が動き回る方向および/または距離を計測することを含む請求項22に記載の方法。
【請求項24】
前記衛星位置決めシステムからの情報を用いた位置変化の計測は、前記移動局が動き回る方向および/または距離を計測することを含む請求項22に記載の方法。
【請求項25】
前記衛星位置決めシステムからの情報は衛星航法システムからの情報を含む請求項22に記載の方法。
【請求項26】
前記衛星位置決めシステムからの情報はガリレオ衛星位置決めシステムからの情報を含む請求項22に記載の方法。
【請求項27】
プロセサと;
前記プロセサに接続される1以上のセンサと;
前記プロセサに接続される無線インターフェースユニットを備え、この無線インターフェースユニットは無線内部接続を介して外部センサからの計測情報を受信することに用いられ、前記プロセサは前記計測情報に基づいて1以上のナビゲーション状態を評価することに用いられる
マルチセンサ計測処理ユニット。
【請求項28】
前記無線インターフェースユニットは外部の生体医用センサからの計測情報を受信することに用いられる請求項27に記載のマルチセンサ計測処理ユニット。
【請求項29】
前記生体医用センサは心拍レートモニタを含む請求項28に記載のマルチセンサ計測処理ユニット。
【請求項30】
前記生体医用センサは血圧モニタを含む請求項28に記載のマルチセンサ計測処理ユニット。
【請求項31】
前記無線内部接続は実質的にブルートゥース規格に従ってインプリメントされた内部接続を持つ請求項27に記載のマルチセンサ計測処理ユニット。
【請求項32】
前記無線内部接続は実質的に近接通信規格に従ってインプリメントされた内部接続を持つ請求項27に記載のマルチセンサ計測処理ユニット。
【請求項33】
前記無線インターフェースユニットは外部プロセサからの計測情報を受信することに用いられる請求項27に記載のマルチセンサ計測処理ユニット。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−150115(P2012−150115A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−23289(P2012−23289)
【出願日】平成24年2月6日(2012.2.6)
【分割の表示】特願2010−501149(P2010−501149)の分割
【原出願日】平成20年3月24日(2008.3.24)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2012−23289(P2012−23289)
【出願日】平成24年2月6日(2012.2.6)
【分割の表示】特願2010−501149(P2010−501149)の分割
【原出願日】平成20年3月24日(2008.3.24)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]