
マルチセンサ検出器ゲイン特性のステッチング方法
【課題】不均一放射照度環境下において検出器ゲイン特性をステッチングおよび線形化する方法を提供する。
【解決手段】不均一放射(平面的なX線(光)領域を有する放射源の使用が必要とされない)状況におけるマルチセンサ検出器ゲイン特性のステッチングおよび線形化の手法で、検出器センサの出力信号強度の変換のためのLUT関数の計算に基づいている。規定されたLUT関数の適用し、測定精度の範囲内で、同じでかつ線形であるセンサゲイン特性が受信される。ステッチングLUT関数の計算は、検出器の領域に沿ってゆっくりと変化する不均一X線(光)を照射し、同じゲイン特性を有する任意の2つの隣接したセンサの応答が、これらのセンサの連結部付近において類似の値を有することを利用する。
【解決手段】不均一放射(平面的なX線(光)領域を有する放射源の使用が必要とされない)状況におけるマルチセンサ検出器ゲイン特性のステッチングおよび線形化の手法で、検出器センサの出力信号強度の変換のためのLUT関数の計算に基づいている。規定されたLUT関数の適用し、測定精度の範囲内で、同じでかつ線形であるセンサゲイン特性が受信される。ステッチングLUT関数の計算は、検出器の領域に沿ってゆっくりと変化する不均一X線(光)を照射し、同じゲイン特性を有する任意の2つの隣接したセンサの応答が、これらのセンサの連結部付近において類似の値を有することを利用する。
【発明の詳細な説明】
【技術分野】
【0001】
発明の分野
本発明は、X線技術の領域、すなわち、X線画像のデジタル検出器に関し、X線画像の向上を意図している。より具体的には、本発明は、マルチセンサ検出器の個別のセンサのゲイン特性のステッチングおよび線形化のために設計される。
【背景技術】
【0002】
技術の先行状態
現在、医薬、天文学、および他の領域におけるデジタルマルチセンサ検出器の適用が、継続的に拡大している。[Howell S.B 「CCD天文学ハンドブック(Handbook of CCD Astronomy)」,ケンブリッジ大学出版,2000; Gino M,「ノイズ、ノイズ、ノイズ(Noise, Noise, Noise)」; S.I. Miroshnichenko, A.A. Nevgasimyj,「マルチセンサデジタルX線受信器の理論と技術(Theory and technique of multisensor digital X-ray receivers)」,バイオテクノスフィア,No. 4/10/2010;B. Yane,「画像のデジタル処理(Digital processing of images)」,M.,テクノスフィア,2007]。
【0003】
マルチセンサ検出器における画像が、いくつかのCCDまたはCMOSセンサによって形成され得る。マルチセンサ検出器の各センサは、次に、それら自身の信号変換経路を有するより小さいセンサを構成し得る。そのような検出器の各センサのゲイン特性は、形成される画像の信号強度の出力値を決定するが、技術的理由および他の理由のために異なる。ゲイン特性の不一致は、検出器のよく知られた応答の不均一性(出力画像の不均一性)、すなわち、結果として得られるデジタル画像におけるセンサの連結部での不連続変化(いわゆる、ステッチ)をもたらす。したがって、実際の実務においては、マルチセンサ検出器を用いる場合、同じ検出器を構成するセンサのゲイン特性をつなぎ合わせる(stitch)作業が発生する。画像取得、応答の均一性、およびセンサ連結部におけるステッチを有さないことの目的のために、すべての特性を1つにつなぎ合わせることのできるキャリブレーションの手法が、適用されなくてはならない。さらに、平面領域のキャリブレーションを実行するために、ゲイン特性線形化の課題が解決されなければならない。
【0004】
特性をつなぎ合わせる課題を解決するためのさまざまなアプローチが存在する。センサの線形応答の場合においては、標準的なアプローチは、いわゆる2点キャリブレーション(two-point calibration)である。CMOSセンサの高い非線形特性におけるそれらの特性のステッチング方法および線形化方法が知られている。たとえば、CMOSセンサ特性の画素ごとのステッチングおよび線形化方法が、以下のソースに記載されている。[ラッド・アイコンイメージング社(Rad-icon Imaging Corp.)AN08:「RadEye(登録商標)センサのための多項ゲイン補正(Polynominal Gain Correction for RadEye(登録商標)Sensors)」,www.rad-icon.com/pdf/Radicon An08.pdf]。これにおいて、
・検出器視野(field-of view:FOV)に沿った均一分布強度を有する光照射野の源を用いて、2つのキャリブレーション画像が、2レベルの入力信号において受信され、第1のレベルの入力信号が次のものよりも2倍小さく選択される。
【0005】
・センサ応答をシミュレートする二次従属性のパラメータが決定され、受信されたキャリブレーション画像を用いて、CMOSセンサの画素特性を線形化するとともにステッチングする補正関数が設定される。
【0006】
CMOSセンサ画素のステッチングおよび線形化の他の方法が、以下のソースに記載される。[Liji C.,jorg P. 「高解像度CMOS画像検出器のための実用的な非線形ゲイン補正(A Practical Non-linear Gain Correction Method for High-resolution CMOS Imaging Detectors)」]。これにおいて、
・3つのさまざまなレベルの出力信号における3つのキャリブレーション画像が、検出器視野に沿った均一分布強度を有する光照射野を用いて受信される。
【0007】
・センサ画素の応答は、3つのセグメントの区分的二次平面従属性によってシミュレートされる。
【0008】
・モデル従属性のパラメータが決定され、受信されたキャリブレーション画像を用いて、CMOSセンサの画素特性を線形化するとともにステッチングする補正関数が設定される。
【0009】
発明のエンジニアリング解に最も近いものは、以下のソースに記載された方法であり、[コダック,「複数出力センサシーム補正(Multiple Output Sensors Seams Correction)」,アプリケーションノート,2009]、それにおいて、検出器特性のセンサごとの線形化およびステッチングが実行される。この方法は以下のことを含む。
【0010】
・N個のキャリブレーション画像列が、検出器視野に沿った均一分布強度を有する光照射源を用いて、放射強度の増加値において受信される。
【0011】
・センサ応答が、入力信号の値についての出力信号の従属性を記述するLUT関数によって測定される。
【0012】
・測定されたセンサ応答が、これらの線形化された応答の中から任意に選択された1つの応答に対して線形化されるとともにステッチングされる。
【先行技術文献】
【非特許文献】
【0013】
【非特許文献1】Howell S.B 「CCD天文学ハンドブック(Handbook of CCD Astronomy)」,ケンブリッジ大学出版,2000
【非特許文献2】コダック,「複数出力センサシーム補正(Multiple Output Sensors Seams Correction)」,アプリケーションノート,2009,(www.kodak.com/global/plugins/acrobat/en/business/ISS/supportdocs/MultipleOutputSensorsSeamsCorrection.pdf)
【非特許文献3】ラッド・アイコンイメージング社(Rad-icon Imaging Corp.)AN08:「RadEye(登録商標)センサのための多項ゲイン補正(Polynominal Gain Correction for RadEye(登録商標)Sensors)」,(www.rad-icon.com/pdf/Radicon An08.pdf)
【非特許文献4】Liji C.,jorg P. 「高解像度CMOS画像検出器のための実用的な非線形ゲイン補正(A Practical Non-linear Gain Correction Method for High-resolution CMOS Imaging Detectors)」,(https://hoertech.hausdeshoerens-oldenburg.de/dgmp2008/abstract/Cao.pdf&rct=j&q=Liji Practical Non-linear Gain Correction Method for High-resolution pdf)
【非特許文献5】Gino M,「ノイズ、ノイズ、ノイズ(Noise, Noise, Noise)」,(http://www.astropys-assist.com/educate/noise/noise.htm)
【非特許文献6】S.I. Miroshnichenko, A.A. Nevgasimyj,「マルチセンサデジタルX線受信器の理論と技術(Theory and technique of multisensor digital X-ray receivers)」,バイオテクノスフィア,No. 4/10/2010
【非特許文献7】B. Yane,「画像のデジタル処理(Digital processing of images)」,M.,テクノスフィア,2007,p583
【発明の概要】
【発明が解決しようとする課題】
【0014】
上記列挙した、[コダック,「複数出力センサシーム補正(Multiple Output Sensors Seams Correction)」,アプリケーションノート,2009]の方法を含む、ゲイン特性の線形化およびステッチングのすべての方法においては、検出器視野に沿って均一分布強度を有する光照射源が用いられる。しかしながら、いくつかの場合には、そのような源を用いることは不都合であり、または本質的に不可能である。この不都合は、その発生の困難性に関連する。検出器視野に沿った均一分布強度を有する光照射源を使用することの不可能性は、たとえば、X線放射を光に変換する、既統合のシンチレーションスクリーンを有する検出器の設計者の利用可能性によって引き起こされ得る。後者の例においては、非平面X線場のみが、検出器視野に沿った不均一分布(不均一放射照度(光)照明)を生じるマルチセンサ検出器のセンサのゲイン特性をステッチングするとともに線形化するために利用可能であることが判明する。
【0015】
本発明の目的は、不均一放射照度環境下において検出器ゲイン特性をステッチングするとともに線形化する方法の開発である。
【課題を解決するための手段】
【0016】
発明の開示
主張される発明の技術的な結果は、(検出器視野に沿った均一分布強度を有する放射源の使用が必要とされない)不均一放射照度環境下において、マルチセンサ検出器ゲイン特性のステッチングおよび線形化を行なう方法を提示することである。
【0017】
放射強度の増加する値において検出器視野に沿った均一分布強度を有するN個のキャリブレーション画像列を取得するステップと、入力信号の値について出力信号の従属性を記述する参照テーブル(look-Up Table:LUT)を用いてセンサ応答を測定するステップと、これら線形化された応答の中から任意に選択された1つの応答に対する測定されたセンサ応答の線形化およびステッチングを行なうステップから成る、マルチセンサ検出器ゲイン特性のステッチングおよび線形化を行なう方法における技術的結果は、以下によって達成される。移動平均計算を用いて受信された検出器キャリブレーション画像においてそれらの応答のM個の値の隣接センサの連結部に沿った積算によって、隣接センサの各対について、隣接センサ信号の境界値の直接変換を実行するM×N個のLUT変換関数の集合を取得する。取得されたLUT変換関数は、検出器出力信号強度のダイナミックレンジ全体について補間して、隣接センサのM個のステッチングLUT関数の集合を取得する。それはさらに平均化されて、各センサについて、隣接センサの応答に対するその応答をステッチングするLUT関数を取得する。任意のセンサの応答が基準応答として選択されるとともに、基準センサ応答に対するセンサ応答のステッチングのLUT関数が連続的に修正されて、現在のセンサについてのステッチングの各LUT関数が前のセンサのステッチングLUT関数を考慮してセットアップされるときにおける、基準センサ応答に対するセンサ応答のステッチングのLUT関数を取得する。基準センサ応答の線形化を実行する、線形化のためのLUT関数が計算され、かつ、ステッチングLUT関数が、選択された基準センサの線形化された応答に対する検出器センサ応答について、結果として得られるステッチングLUT関数を取得する決定された線形化関数を用いて連続的に修正される。
【0018】
センサ連結部に沿った移動平均の計算の方法を用いる、M個のセンサ応答の値の積算に代えて、置換可能なセンサの連結部における入力X線(光)照射野の勾配の影響を低減することを可能にする、センサ外部のM個の値の外挿を伴う平面による信号の移動局所線形近似が使用される方法で、本発明を実行することも可能である。他の可能性のある変形例は、不均一強度を有する入力光照射野によって照射される検出器のセンサのゲイン特性のステッチングおよび線形化を実行することである。
【0019】
少なくとも1つのセンサは、部分に分割することができ、特性のインターセンサ(inter-sensor)ステッチングよってまず引き継がれる、イントラセンサ(intra-sensor)ステッチングが実行されてもよい。
【発明の効果】
【0020】
本発明の主な特徴的な局面は、マルチセンサ検出器特性のステッチングおよび線形化が、検出器視野に沿った均一分布強度を有する照射源を使用することを必要としないという事実である。
【図面の簡単な説明】
【0021】
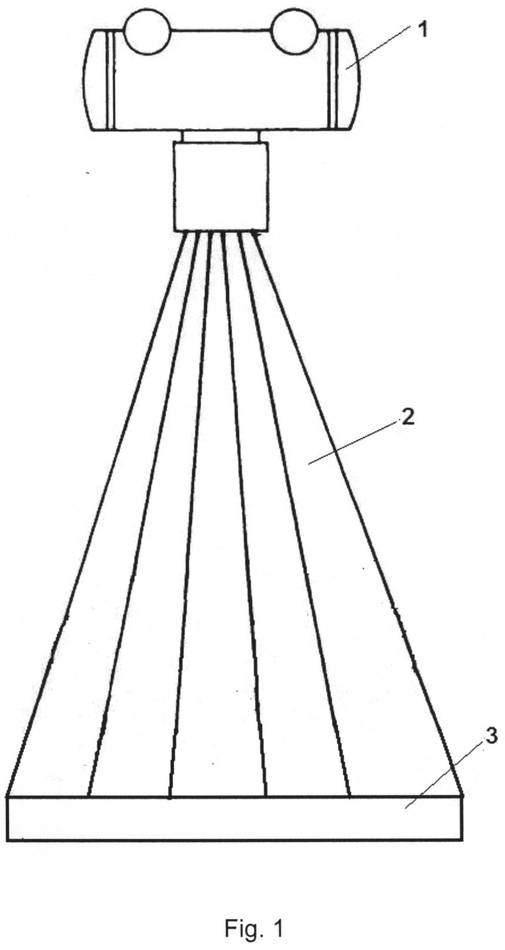
【図1】X線画像のための装置を示す図である。
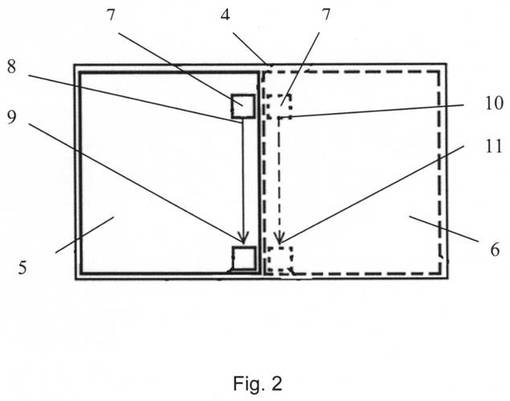
【図2】本発明においてステッチングのために用いられるセンサ応答評価の概略スキームを示す図である。
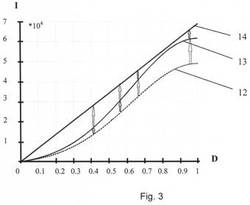
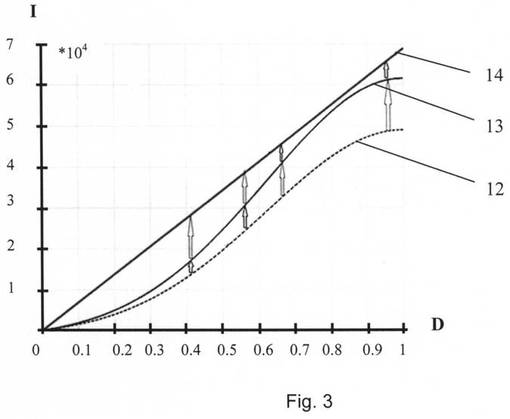
【図3】2つの隣接センサのみで構成される検出器のセンサ特性のステッチングおよび線形化の概略図である。
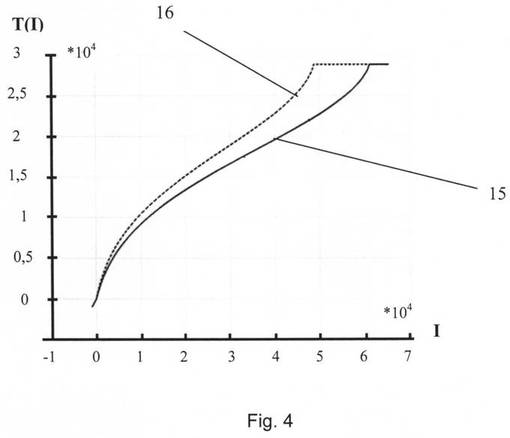
【図4】ゲイン特性のステッチングおよび線形化の変換のLUT関数グラフを示す図である。
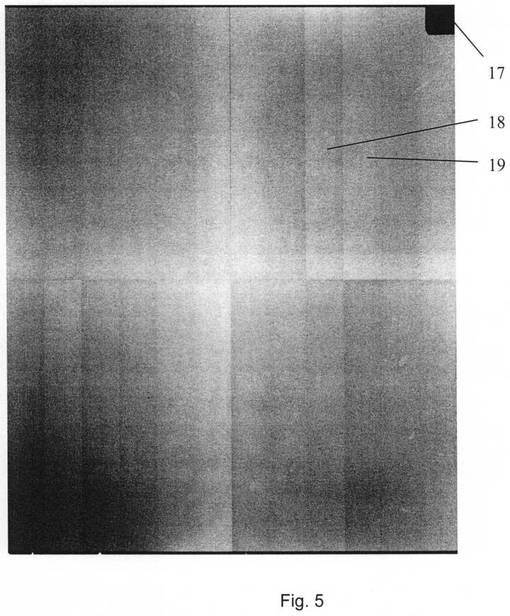
【図5】24個のセンサで構成される検出器を用いて取得された、5000×4000画素の初期X線画像を示す図である。
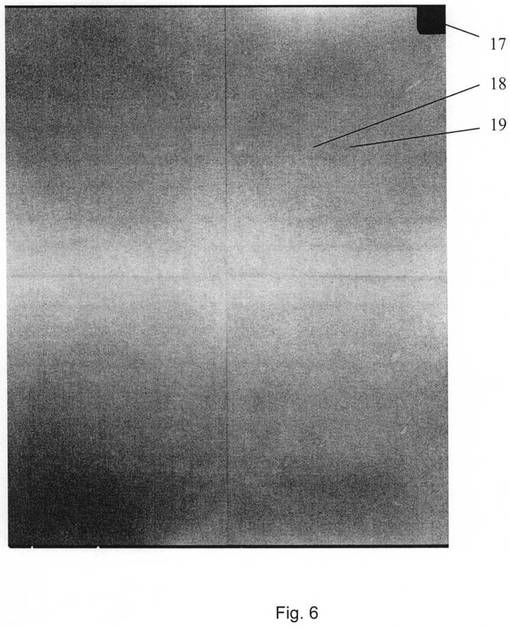
【図6】本発明において提案された、24個のセンサで構成される検出器のためのゲイン特性のステッチングおよび線形化の技術の効果を示す図である。
【発明を実施するための形態】
【0022】
発明の詳細な説明
本発明のエンジニアリング解、その技術的実現可能性、および技術的結果の達成が、図1〜図6によって示される。
【0023】
X線画像の取得が、たとえば、図1に示される装置を用いて実行される。その装置は、X線ビーム2を放出するX線管1から成る。X線ビーム2は、検出器3によって受信される。検出器3は、シンチレーションスクリーン(図示せず)、およびマトリックスアレイカメラ(図示せず)を含む。シンチレーションスクリーンは、アクティブなマトリックスアレイカメラの表面と光学的に接続される。マトリックスアレイカメラ(図示せず)は、少なくとも1つのセンサから成る。マトリックスアレイカメラは、任意の有限数、たとえば2つのセンサで構成することができる。
【0024】
X線ビーム2は検出器3上に投射され、シンチレーションスクリーンは、それを可視光に変換し、次いで、検出器センサによってデジタル形式に変換される。規定された形式は、検出器内のセンサの数に対応する数のいくつかの部分で構成されるデジタル画像を表わす。図2は、隣接する2つのセンサ5,6で構成される検出器3によって形成されたデジタル画像4を概略的に示す。
【0025】
本発明の方法に従えば、まず、N個のキャリブレーション画像列が生成される。キャリブレーション画像は、吸収物体を有さない検出器視野に沿った均一分布強度で実行される。画像は、ゼロ露出(読出画像(read-out image))から検出器センサからの飽和信号の発生までのランダムステップの強度で増加される放射強度値において生成される。照射野は一般的に非平面的であるので、検出器3のセンサは、不均一に飽和に達する。センサ応答評価の後続ステージにおけるノイズ影響を低減するために、いくつかの画像は、平均化される各強度値について、後に取得される。画像列の取得と同時に、検出器3の任意に選択された場所で照射強度値が線量計(図示せず)によって測定され、たとえば、検出器3の上位でまたはそれと並行して処理される。
【0026】
そして、M個のセンサ応答値は、隣接センサの連結部に沿った、たとえば、30×30画素の、信号の小さいサイズの評価単位7についての移動平均計算法を用いて積算される。位置8における信号の評価単位7は、数1の下でのセンサ応答5に対応し、信号の評価単位7の位置9(図2)は、数Mの下でのセンサ応答5に対応する。同様に、センサ6について、信号の評価単位7の位置10は、センサ6の第1の応答に対応し、信号の評価単位7の位置11は、数Mの下でのセンサ6の応答に対応する。信号評価のために、サンプル平均が用いられ、あるいは、ノイズ許容範囲を増加するために、中央値(メジアン)が用いられる。図3は、関数のグラフを示している。12は、隣接センサ5,6の連結部での、信号の評価単位7のM個の位置のうちの1つにおけるセンサ5の応答である。13は、信号の評価単位7のM個の位置のうちの1つにおけるセンサ6の応答である。14は、隣接するセンサ5,6の、理想的な共通線形応答である。グラフ(図3)の横軸には、強度の測定値(たとえば、最大強度値に対して標準化されたドーズ(D)における相対的な単位)が示される。縦軸には、選択された信号評価領域における、信号強度の計算値(I)が示される。
【0027】
境界に沿ったセンサ応答値の積算のメインアイデアは、センサ連結部の近くにおいて、検出器3の領域に沿って緩やかに変化する入力X線(光)照射野を有する照射強度が、仮想的に同じであるという事実の使用に基づいている。そのため、補正されたセンサ5,6の応答値は、連結部において同様の値を有する。N個のキャリブレーション画像についてのセンサの信号応答の受信したM個の値に基づくアイデアを実現するために、M×N個のLUT変換関数の集合が受信され、それらのLUT変換関数は、隣接センサ信号のうちの1つの境界値の、他方のセンサの信号の境界値への直接変換を実行する。たとえば、キャリブレーション画像内の境界において計算されたセンサ6の各出力信号強度は、センサ5の境界強度の値に関連する。
【0028】
これらのLUT変換関数は、検出器出力信号強度のダイナミックレンジ全体について補間し、ステッチングのM個のLUT関数の集合を取得する。
【0029】
ステッチングのM個のLUT関数の集合は、引き続き実行される、キャリブレーション画像に存在するノイズによって生じる信号評価内の誤差の低減の目的のために平均化される。
【0030】
各センサについてのこのような方法において、隣接センサの応答にその応答をステッチングするLUTが受信される。この目的のために、任意の検出器センサの応答(たとえば、図2におけるセンサ5の応答)が選択され、以下基準と称されるが、ステッチングLUTは、その基準応答から、基準センサ5のゲイン特性へのセンサのゲイン特性のステッチングが実行される効果に対する他のセンサへ連続的に修正される。
【0031】
結果として、そのようなステッチングLUTは、キャリブレーション画像によって受信され、マルチセンサ検出器のセンサのゲイン特性のステッチングを提供する。
【0032】
センサ5,6のゲイン特性のステッチングに加えて、平面照射野のキャリブレーションが実行され、基準センサ5のゲイン特性が線形化されるとともに、基準センサ5の線形化されたゲイン特性に対するセンサ6のゲイン特性に変換される。つまり、基準センサ応答の線形化を実行する線形化のLUTが計算される。そして、選択された基準センサ5の線形化された応答に対する検出器のセンサ6の応答のステッチングの結果として得られるLUTを受信する決定された線形化関数によって、ステッチングのLUTが連続的に修正される。
【0033】
図4は、図3の線形応答14に応答するセンサ5のステッチングLUT15のグラフを示し、16は、図3の線形応答14に応答するセンサ5の応答のステッチングLUTのグラフを示す。横軸(図4)には入力強度信号(I)が設定され、縦軸には出力強度T(I)が示される。
【0034】
ゲイン特性のステッチングおよび線形化の記載されたスキームは、各個別のセンサの応答が、まず最初に、1つの特性によって決定されることを提案する。マルチセンサ検出器のステッチングおよび線形化のさまざまな組み合わせが可能である。センサ特性が、個別センサにおいてさまざまな非線形性を有する場合、本明細書で記載されたステッチングおよび線形化のスキームは、センサを部分に分割するとともに、特性のインターセンサステッチングによって引き継がれる最初のイントラセンサステッチングを実行することを可能とする。特に大きな勾配を伴う入力照射野を用いる場合、センサ連結部における勾配影響を低減するために、受信されたキャリブレーション画像におけるセンサ連結部に沿った移動平均の計算方法によるセンサ応答のM個の値の積算に代えて、センサ外部のM個の値の外挿を有する平面による信号の移動局所線形近似の方法が用いられる。
【0035】
本発明の方法の適用の結果が、図5および図6に示される。図5は、24個のセンサで構成される、5000×4000画素サイズのショットを示す。17は、線量計の画像であり、18および19は、検出器3の2つの隣接するセンサから受信された画像である。図5は、センサの応答の違いを示しており、特に、隣接センサから受信した画像18と画像19との間の連結部について利用可能性がある。図6は、本発明において主張される、センサゲイン特性のステッチングおよび線形化の方法の適用例を示す。センサの応答は、同じでかつ線形となっており、センサ間の境界はほとんど感知できない。
【0036】
本発明の最良の実施形態
【0037】
【数1】

【0038】
【数2】
【0039】
【数3】
【0040】
本明細書で概説した、センサゲイン特性の連続したステッチングおよび線形化のスキームは、検出器内に2つより多くのセンサを有する場合にも容易に拡張することができる。
【符号の説明】
【0041】
1 X線管、2 X線ビーム、3 検出器、4 画像,5,6 センサ、7 評価単位。
【技術分野】
【0001】
発明の分野
本発明は、X線技術の領域、すなわち、X線画像のデジタル検出器に関し、X線画像の向上を意図している。より具体的には、本発明は、マルチセンサ検出器の個別のセンサのゲイン特性のステッチングおよび線形化のために設計される。
【背景技術】
【0002】
技術の先行状態
現在、医薬、天文学、および他の領域におけるデジタルマルチセンサ検出器の適用が、継続的に拡大している。[Howell S.B 「CCD天文学ハンドブック(Handbook of CCD Astronomy)」,ケンブリッジ大学出版,2000; Gino M,「ノイズ、ノイズ、ノイズ(Noise, Noise, Noise)」; S.I. Miroshnichenko, A.A. Nevgasimyj,「マルチセンサデジタルX線受信器の理論と技術(Theory and technique of multisensor digital X-ray receivers)」,バイオテクノスフィア,No. 4/10/2010;B. Yane,「画像のデジタル処理(Digital processing of images)」,M.,テクノスフィア,2007]。
【0003】
マルチセンサ検出器における画像が、いくつかのCCDまたはCMOSセンサによって形成され得る。マルチセンサ検出器の各センサは、次に、それら自身の信号変換経路を有するより小さいセンサを構成し得る。そのような検出器の各センサのゲイン特性は、形成される画像の信号強度の出力値を決定するが、技術的理由および他の理由のために異なる。ゲイン特性の不一致は、検出器のよく知られた応答の不均一性(出力画像の不均一性)、すなわち、結果として得られるデジタル画像におけるセンサの連結部での不連続変化(いわゆる、ステッチ)をもたらす。したがって、実際の実務においては、マルチセンサ検出器を用いる場合、同じ検出器を構成するセンサのゲイン特性をつなぎ合わせる(stitch)作業が発生する。画像取得、応答の均一性、およびセンサ連結部におけるステッチを有さないことの目的のために、すべての特性を1つにつなぎ合わせることのできるキャリブレーションの手法が、適用されなくてはならない。さらに、平面領域のキャリブレーションを実行するために、ゲイン特性線形化の課題が解決されなければならない。
【0004】
特性をつなぎ合わせる課題を解決するためのさまざまなアプローチが存在する。センサの線形応答の場合においては、標準的なアプローチは、いわゆる2点キャリブレーション(two-point calibration)である。CMOSセンサの高い非線形特性におけるそれらの特性のステッチング方法および線形化方法が知られている。たとえば、CMOSセンサ特性の画素ごとのステッチングおよび線形化方法が、以下のソースに記載されている。[ラッド・アイコンイメージング社(Rad-icon Imaging Corp.)AN08:「RadEye(登録商標)センサのための多項ゲイン補正(Polynominal Gain Correction for RadEye(登録商標)Sensors)」,www.rad-icon.com/pdf/Radicon An08.pdf]。これにおいて、
・検出器視野(field-of view:FOV)に沿った均一分布強度を有する光照射野の源を用いて、2つのキャリブレーション画像が、2レベルの入力信号において受信され、第1のレベルの入力信号が次のものよりも2倍小さく選択される。
【0005】
・センサ応答をシミュレートする二次従属性のパラメータが決定され、受信されたキャリブレーション画像を用いて、CMOSセンサの画素特性を線形化するとともにステッチングする補正関数が設定される。
【0006】
CMOSセンサ画素のステッチングおよび線形化の他の方法が、以下のソースに記載される。[Liji C.,jorg P. 「高解像度CMOS画像検出器のための実用的な非線形ゲイン補正(A Practical Non-linear Gain Correction Method for High-resolution CMOS Imaging Detectors)」]。これにおいて、
・3つのさまざまなレベルの出力信号における3つのキャリブレーション画像が、検出器視野に沿った均一分布強度を有する光照射野を用いて受信される。
【0007】
・センサ画素の応答は、3つのセグメントの区分的二次平面従属性によってシミュレートされる。
【0008】
・モデル従属性のパラメータが決定され、受信されたキャリブレーション画像を用いて、CMOSセンサの画素特性を線形化するとともにステッチングする補正関数が設定される。
【0009】
発明のエンジニアリング解に最も近いものは、以下のソースに記載された方法であり、[コダック,「複数出力センサシーム補正(Multiple Output Sensors Seams Correction)」,アプリケーションノート,2009]、それにおいて、検出器特性のセンサごとの線形化およびステッチングが実行される。この方法は以下のことを含む。
【0010】
・N個のキャリブレーション画像列が、検出器視野に沿った均一分布強度を有する光照射源を用いて、放射強度の増加値において受信される。
【0011】
・センサ応答が、入力信号の値についての出力信号の従属性を記述するLUT関数によって測定される。
【0012】
・測定されたセンサ応答が、これらの線形化された応答の中から任意に選択された1つの応答に対して線形化されるとともにステッチングされる。
【先行技術文献】
【非特許文献】
【0013】
【非特許文献1】Howell S.B 「CCD天文学ハンドブック(Handbook of CCD Astronomy)」,ケンブリッジ大学出版,2000
【非特許文献2】コダック,「複数出力センサシーム補正(Multiple Output Sensors Seams Correction)」,アプリケーションノート,2009,(www.kodak.com/global/plugins/acrobat/en/business/ISS/supportdocs/MultipleOutputSensorsSeamsCorrection.pdf)
【非特許文献3】ラッド・アイコンイメージング社(Rad-icon Imaging Corp.)AN08:「RadEye(登録商標)センサのための多項ゲイン補正(Polynominal Gain Correction for RadEye(登録商標)Sensors)」,(www.rad-icon.com/pdf/Radicon An08.pdf)
【非特許文献4】Liji C.,jorg P. 「高解像度CMOS画像検出器のための実用的な非線形ゲイン補正(A Practical Non-linear Gain Correction Method for High-resolution CMOS Imaging Detectors)」,(https://hoertech.hausdeshoerens-oldenburg.de/dgmp2008/abstract/Cao.pdf&rct=j&q=Liji Practical Non-linear Gain Correction Method for High-resolution pdf)
【非特許文献5】Gino M,「ノイズ、ノイズ、ノイズ(Noise, Noise, Noise)」,(http://www.astropys-assist.com/educate/noise/noise.htm)
【非特許文献6】S.I. Miroshnichenko, A.A. Nevgasimyj,「マルチセンサデジタルX線受信器の理論と技術(Theory and technique of multisensor digital X-ray receivers)」,バイオテクノスフィア,No. 4/10/2010
【非特許文献7】B. Yane,「画像のデジタル処理(Digital processing of images)」,M.,テクノスフィア,2007,p583
【発明の概要】
【発明が解決しようとする課題】
【0014】
上記列挙した、[コダック,「複数出力センサシーム補正(Multiple Output Sensors Seams Correction)」,アプリケーションノート,2009]の方法を含む、ゲイン特性の線形化およびステッチングのすべての方法においては、検出器視野に沿って均一分布強度を有する光照射源が用いられる。しかしながら、いくつかの場合には、そのような源を用いることは不都合であり、または本質的に不可能である。この不都合は、その発生の困難性に関連する。検出器視野に沿った均一分布強度を有する光照射源を使用することの不可能性は、たとえば、X線放射を光に変換する、既統合のシンチレーションスクリーンを有する検出器の設計者の利用可能性によって引き起こされ得る。後者の例においては、非平面X線場のみが、検出器視野に沿った不均一分布(不均一放射照度(光)照明)を生じるマルチセンサ検出器のセンサのゲイン特性をステッチングするとともに線形化するために利用可能であることが判明する。
【0015】
本発明の目的は、不均一放射照度環境下において検出器ゲイン特性をステッチングするとともに線形化する方法の開発である。
【課題を解決するための手段】
【0016】
発明の開示
主張される発明の技術的な結果は、(検出器視野に沿った均一分布強度を有する放射源の使用が必要とされない)不均一放射照度環境下において、マルチセンサ検出器ゲイン特性のステッチングおよび線形化を行なう方法を提示することである。
【0017】
放射強度の増加する値において検出器視野に沿った均一分布強度を有するN個のキャリブレーション画像列を取得するステップと、入力信号の値について出力信号の従属性を記述する参照テーブル(look-Up Table:LUT)を用いてセンサ応答を測定するステップと、これら線形化された応答の中から任意に選択された1つの応答に対する測定されたセンサ応答の線形化およびステッチングを行なうステップから成る、マルチセンサ検出器ゲイン特性のステッチングおよび線形化を行なう方法における技術的結果は、以下によって達成される。移動平均計算を用いて受信された検出器キャリブレーション画像においてそれらの応答のM個の値の隣接センサの連結部に沿った積算によって、隣接センサの各対について、隣接センサ信号の境界値の直接変換を実行するM×N個のLUT変換関数の集合を取得する。取得されたLUT変換関数は、検出器出力信号強度のダイナミックレンジ全体について補間して、隣接センサのM個のステッチングLUT関数の集合を取得する。それはさらに平均化されて、各センサについて、隣接センサの応答に対するその応答をステッチングするLUT関数を取得する。任意のセンサの応答が基準応答として選択されるとともに、基準センサ応答に対するセンサ応答のステッチングのLUT関数が連続的に修正されて、現在のセンサについてのステッチングの各LUT関数が前のセンサのステッチングLUT関数を考慮してセットアップされるときにおける、基準センサ応答に対するセンサ応答のステッチングのLUT関数を取得する。基準センサ応答の線形化を実行する、線形化のためのLUT関数が計算され、かつ、ステッチングLUT関数が、選択された基準センサの線形化された応答に対する検出器センサ応答について、結果として得られるステッチングLUT関数を取得する決定された線形化関数を用いて連続的に修正される。
【0018】
センサ連結部に沿った移動平均の計算の方法を用いる、M個のセンサ応答の値の積算に代えて、置換可能なセンサの連結部における入力X線(光)照射野の勾配の影響を低減することを可能にする、センサ外部のM個の値の外挿を伴う平面による信号の移動局所線形近似が使用される方法で、本発明を実行することも可能である。他の可能性のある変形例は、不均一強度を有する入力光照射野によって照射される検出器のセンサのゲイン特性のステッチングおよび線形化を実行することである。
【0019】
少なくとも1つのセンサは、部分に分割することができ、特性のインターセンサ(inter-sensor)ステッチングよってまず引き継がれる、イントラセンサ(intra-sensor)ステッチングが実行されてもよい。
【発明の効果】
【0020】
本発明の主な特徴的な局面は、マルチセンサ検出器特性のステッチングおよび線形化が、検出器視野に沿った均一分布強度を有する照射源を使用することを必要としないという事実である。
【図面の簡単な説明】
【0021】
【図1】X線画像のための装置を示す図である。
【図2】本発明においてステッチングのために用いられるセンサ応答評価の概略スキームを示す図である。
【図3】2つの隣接センサのみで構成される検出器のセンサ特性のステッチングおよび線形化の概略図である。
【図4】ゲイン特性のステッチングおよび線形化の変換のLUT関数グラフを示す図である。
【図5】24個のセンサで構成される検出器を用いて取得された、5000×4000画素の初期X線画像を示す図である。
【図6】本発明において提案された、24個のセンサで構成される検出器のためのゲイン特性のステッチングおよび線形化の技術の効果を示す図である。
【発明を実施するための形態】
【0022】
発明の詳細な説明
本発明のエンジニアリング解、その技術的実現可能性、および技術的結果の達成が、図1〜図6によって示される。
【0023】
X線画像の取得が、たとえば、図1に示される装置を用いて実行される。その装置は、X線ビーム2を放出するX線管1から成る。X線ビーム2は、検出器3によって受信される。検出器3は、シンチレーションスクリーン(図示せず)、およびマトリックスアレイカメラ(図示せず)を含む。シンチレーションスクリーンは、アクティブなマトリックスアレイカメラの表面と光学的に接続される。マトリックスアレイカメラ(図示せず)は、少なくとも1つのセンサから成る。マトリックスアレイカメラは、任意の有限数、たとえば2つのセンサで構成することができる。
【0024】
X線ビーム2は検出器3上に投射され、シンチレーションスクリーンは、それを可視光に変換し、次いで、検出器センサによってデジタル形式に変換される。規定された形式は、検出器内のセンサの数に対応する数のいくつかの部分で構成されるデジタル画像を表わす。図2は、隣接する2つのセンサ5,6で構成される検出器3によって形成されたデジタル画像4を概略的に示す。
【0025】
本発明の方法に従えば、まず、N個のキャリブレーション画像列が生成される。キャリブレーション画像は、吸収物体を有さない検出器視野に沿った均一分布強度で実行される。画像は、ゼロ露出(読出画像(read-out image))から検出器センサからの飽和信号の発生までのランダムステップの強度で増加される放射強度値において生成される。照射野は一般的に非平面的であるので、検出器3のセンサは、不均一に飽和に達する。センサ応答評価の後続ステージにおけるノイズ影響を低減するために、いくつかの画像は、平均化される各強度値について、後に取得される。画像列の取得と同時に、検出器3の任意に選択された場所で照射強度値が線量計(図示せず)によって測定され、たとえば、検出器3の上位でまたはそれと並行して処理される。
【0026】
そして、M個のセンサ応答値は、隣接センサの連結部に沿った、たとえば、30×30画素の、信号の小さいサイズの評価単位7についての移動平均計算法を用いて積算される。位置8における信号の評価単位7は、数1の下でのセンサ応答5に対応し、信号の評価単位7の位置9(図2)は、数Mの下でのセンサ応答5に対応する。同様に、センサ6について、信号の評価単位7の位置10は、センサ6の第1の応答に対応し、信号の評価単位7の位置11は、数Mの下でのセンサ6の応答に対応する。信号評価のために、サンプル平均が用いられ、あるいは、ノイズ許容範囲を増加するために、中央値(メジアン)が用いられる。図3は、関数のグラフを示している。12は、隣接センサ5,6の連結部での、信号の評価単位7のM個の位置のうちの1つにおけるセンサ5の応答である。13は、信号の評価単位7のM個の位置のうちの1つにおけるセンサ6の応答である。14は、隣接するセンサ5,6の、理想的な共通線形応答である。グラフ(図3)の横軸には、強度の測定値(たとえば、最大強度値に対して標準化されたドーズ(D)における相対的な単位)が示される。縦軸には、選択された信号評価領域における、信号強度の計算値(I)が示される。
【0027】
境界に沿ったセンサ応答値の積算のメインアイデアは、センサ連結部の近くにおいて、検出器3の領域に沿って緩やかに変化する入力X線(光)照射野を有する照射強度が、仮想的に同じであるという事実の使用に基づいている。そのため、補正されたセンサ5,6の応答値は、連結部において同様の値を有する。N個のキャリブレーション画像についてのセンサの信号応答の受信したM個の値に基づくアイデアを実現するために、M×N個のLUT変換関数の集合が受信され、それらのLUT変換関数は、隣接センサ信号のうちの1つの境界値の、他方のセンサの信号の境界値への直接変換を実行する。たとえば、キャリブレーション画像内の境界において計算されたセンサ6の各出力信号強度は、センサ5の境界強度の値に関連する。
【0028】
これらのLUT変換関数は、検出器出力信号強度のダイナミックレンジ全体について補間し、ステッチングのM個のLUT関数の集合を取得する。
【0029】
ステッチングのM個のLUT関数の集合は、引き続き実行される、キャリブレーション画像に存在するノイズによって生じる信号評価内の誤差の低減の目的のために平均化される。
【0030】
各センサについてのこのような方法において、隣接センサの応答にその応答をステッチングするLUTが受信される。この目的のために、任意の検出器センサの応答(たとえば、図2におけるセンサ5の応答)が選択され、以下基準と称されるが、ステッチングLUTは、その基準応答から、基準センサ5のゲイン特性へのセンサのゲイン特性のステッチングが実行される効果に対する他のセンサへ連続的に修正される。
【0031】
結果として、そのようなステッチングLUTは、キャリブレーション画像によって受信され、マルチセンサ検出器のセンサのゲイン特性のステッチングを提供する。
【0032】
センサ5,6のゲイン特性のステッチングに加えて、平面照射野のキャリブレーションが実行され、基準センサ5のゲイン特性が線形化されるとともに、基準センサ5の線形化されたゲイン特性に対するセンサ6のゲイン特性に変換される。つまり、基準センサ応答の線形化を実行する線形化のLUTが計算される。そして、選択された基準センサ5の線形化された応答に対する検出器のセンサ6の応答のステッチングの結果として得られるLUTを受信する決定された線形化関数によって、ステッチングのLUTが連続的に修正される。
【0033】
図4は、図3の線形応答14に応答するセンサ5のステッチングLUT15のグラフを示し、16は、図3の線形応答14に応答するセンサ5の応答のステッチングLUTのグラフを示す。横軸(図4)には入力強度信号(I)が設定され、縦軸には出力強度T(I)が示される。
【0034】
ゲイン特性のステッチングおよび線形化の記載されたスキームは、各個別のセンサの応答が、まず最初に、1つの特性によって決定されることを提案する。マルチセンサ検出器のステッチングおよび線形化のさまざまな組み合わせが可能である。センサ特性が、個別センサにおいてさまざまな非線形性を有する場合、本明細書で記載されたステッチングおよび線形化のスキームは、センサを部分に分割するとともに、特性のインターセンサステッチングによって引き継がれる最初のイントラセンサステッチングを実行することを可能とする。特に大きな勾配を伴う入力照射野を用いる場合、センサ連結部における勾配影響を低減するために、受信されたキャリブレーション画像におけるセンサ連結部に沿った移動平均の計算方法によるセンサ応答のM個の値の積算に代えて、センサ外部のM個の値の外挿を有する平面による信号の移動局所線形近似の方法が用いられる。
【0035】
本発明の方法の適用の結果が、図5および図6に示される。図5は、24個のセンサで構成される、5000×4000画素サイズのショットを示す。17は、線量計の画像であり、18および19は、検出器3の2つの隣接するセンサから受信された画像である。図5は、センサの応答の違いを示しており、特に、隣接センサから受信した画像18と画像19との間の連結部について利用可能性がある。図6は、本発明において主張される、センサゲイン特性のステッチングおよび線形化の方法の適用例を示す。センサの応答は、同じでかつ線形となっており、センサ間の境界はほとんど感知できない。
【0036】
本発明の最良の実施形態
【0037】
【数1】
【0038】
【数2】
【0039】
【数3】
【0040】
本明細書で概説した、センサゲイン特性の連続したステッチングおよび線形化のスキームは、検出器内に2つより多くのセンサを有する場合にも容易に拡張することができる。
【符号の説明】
【0041】
1 X線管、2 X線ビーム、3 検出器、4 画像,5,6 センサ、7 評価単位。
【特許請求の範囲】
【請求項1】
マルチセンサ検出器ゲイン特性のステッチングの方法であって、放射強度の増加する値における前記検出器の視野に沿った、均一分布放射強度を有するN個のキャリブレーション画像列を取得するステップと、
入力信号の値についての出力信号の依存性を記述するLUTによって、センサ応答を測定するステップと、
これらの線形化された応答の中から任意に選択された1つの応答に対して、測定されたセンサ応答を線形化およびステッチングするステップとを含み、
前記方法は、
移動平均計算を用いて、前記受信された検出器キャリブレーション画像におけるそれらの応答のM個の値の隣接するセンサの連結に沿った積算によって特徴付けられ、隣接するセンサの各対について、隣接センサ信号の境界値の直接変換を実行する変形のためのM×N個のLUT関数の集合を取得し、
前記取得されたLUT変換関数は、検出器出力信号強度のダイナミックレンジ全体について補間して、前記隣接センサのM個のステッチングLUT関数の集合を取得し、
それはさらに平均化されて、各センサについて、前記隣接センサの応答に対して、その応答をステッチングするLUT関数を取得し、
任意のセンサの応答が基準応答として選択されるとともに、前記基準センサ応答に対してセンサ応答のステッチングの前記LUT関数が連続的に修正され、現在のセンサについてのステッチングの各LUT関数が前のセンサのステッチングLUT関数を考慮してセットアップされるときにおいて、前記基準センサ応答に対するセンサ応答のステッチングのLUT関数を取得し、
基準センサ応答の線形化を実行する、線形化のための前記LUT関数が計算され、かつ、前記ステッチングLUT関数が、前記選択された基準センサの線形化された応答に対する検出器センサ応答について、結果として得られるステッチングLUT関数を取得する決定された線形化関数を用いて連続的に修正される、方法。
【請求項2】
キャリブレーション画像列の受信後に、信号のM個の値が、前記センサ外部のM個の値の外挿を有する平面による、信号の移動局所線形近似によって評価される事実によって特徴付けられる、請求項1に記載の方法。
【請求項3】
不均一強度を有する入力光照射野によって軽度に露光される、検出器のセンサの振幅特性のステッチングおよび線形化が実行されるという事実によって特徴付けられる、請求項1に記載の方法。
【請求項4】
前記センサの少なくとも1つは部分に分解され、その特性のイントラセンサ(intra-sensor)ステッチングが実行され、特性のインターセンサ(inter-sensor)ステッチングによって引き継がれるという事実によって特徴付けられる、請求項1〜3のいずれかに記載の方法。
【請求項1】
マルチセンサ検出器ゲイン特性のステッチングの方法であって、放射強度の増加する値における前記検出器の視野に沿った、均一分布放射強度を有するN個のキャリブレーション画像列を取得するステップと、
入力信号の値についての出力信号の依存性を記述するLUTによって、センサ応答を測定するステップと、
これらの線形化された応答の中から任意に選択された1つの応答に対して、測定されたセンサ応答を線形化およびステッチングするステップとを含み、
前記方法は、
移動平均計算を用いて、前記受信された検出器キャリブレーション画像におけるそれらの応答のM個の値の隣接するセンサの連結に沿った積算によって特徴付けられ、隣接するセンサの各対について、隣接センサ信号の境界値の直接変換を実行する変形のためのM×N個のLUT関数の集合を取得し、
前記取得されたLUT変換関数は、検出器出力信号強度のダイナミックレンジ全体について補間して、前記隣接センサのM個のステッチングLUT関数の集合を取得し、
それはさらに平均化されて、各センサについて、前記隣接センサの応答に対して、その応答をステッチングするLUT関数を取得し、
任意のセンサの応答が基準応答として選択されるとともに、前記基準センサ応答に対してセンサ応答のステッチングの前記LUT関数が連続的に修正され、現在のセンサについてのステッチングの各LUT関数が前のセンサのステッチングLUT関数を考慮してセットアップされるときにおいて、前記基準センサ応答に対するセンサ応答のステッチングのLUT関数を取得し、
基準センサ応答の線形化を実行する、線形化のための前記LUT関数が計算され、かつ、前記ステッチングLUT関数が、前記選択された基準センサの線形化された応答に対する検出器センサ応答について、結果として得られるステッチングLUT関数を取得する決定された線形化関数を用いて連続的に修正される、方法。
【請求項2】
キャリブレーション画像列の受信後に、信号のM個の値が、前記センサ外部のM個の値の外挿を有する平面による、信号の移動局所線形近似によって評価される事実によって特徴付けられる、請求項1に記載の方法。
【請求項3】
不均一強度を有する入力光照射野によって軽度に露光される、検出器のセンサの振幅特性のステッチングおよび線形化が実行されるという事実によって特徴付けられる、請求項1に記載の方法。
【請求項4】
前記センサの少なくとも1つは部分に分解され、その特性のイントラセンサ(intra-sensor)ステッチングが実行され、特性のインターセンサ(inter-sensor)ステッチングによって引き継がれるという事実によって特徴付けられる、請求項1〜3のいずれかに記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−24861(P2013−24861A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2012−91963(P2012−91963)
【出願日】平成24年4月13日(2012.4.13)
【出願人】(512008864)
【氏名又は名称原語表記】ZAKRYTOE AKCIONERNOE OBSHCHESTVO (IMPUL’S)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成24年4月13日(2012.4.13)
【出願人】(512008864)
【氏名又は名称原語表記】ZAKRYTOE AKCIONERNOE OBSHCHESTVO (IMPUL’S)
【Fターム(参考)】
[ Back to top ]