
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。

【発明の詳細な説明】
【技術分野】
【0001】
関連出願の相互参照
本開示は、座標測定機に関し、より詳細には、複数の独立したバスを有する可搬型の関節アーム座標測定機に関する。
【背景技術】
【0002】
本出願は、2010年1月20日に出願した仮出願第61/296,555号、2010年6月16日に出願した仮出願第61/355,279号、および2010年6月4日に出願した仮出願61/351,347号の利益を主張するものであり、これらの仮出願の内容は、それらの全体を本願に引用して援用する。
【0003】
可搬型の関節アーム座標測定機(AACMM)は、部品の製造または生産のさまざまな段階(例えば、機械加工)の間に部品の寸法を迅速かつ正確に確認するニーズが存在する部品の製造または生産に広く使用されている。可搬型のAACMMは、特に、比較的複雑な部品の寸法の測定を実行するのにかかる時間量の中で、知られている据え付け式のまたは固定式の、コストが高く、使用するのが比較的難しい測定設備と比べて大きな改善を示す。通常、可搬型のAACMMのユーザは、単純に、測定されるべき部品または物体の表面に沿ってプローブを導く。次に、測定データが記録され、ユーザに提供される。場合によっては、データは、視覚的な形態、例えば、コンピュータスクリーン上の3次元(3D)の形態でユーザに提供される。その他の場合、データは、数字の形態でユーザに提供され、例えば、穴の直径を測定するとき、テキスト「直径=1.0034」がコンピュータスクリーン上に表示される。
【0004】
先行技術の可搬型の関節アームCMMの一例が、同一出願人による米国特許第5,402,582(‘582)号に開示されており、この米国特許は、その全体を本願に引用して援用する。‘582号特許は、一端に支持基部を、他端に測定プローブを有する手動操作式の関節アームCMMを備える3D測定システムを開示する。同一出願人による米国特許第5,611,147(‘147)号は、類似の関節アームCMMを開示しており、この米国特許は、その全体を本願に引用して援用する。‘147号特許においては、関節アームCMMは、プローブ端の追加的な回転軸を含むいくつかの特徴を含み、それによって、2−2−2軸構成または2−2−3軸構成(後者は7軸アームである)のどちらかを有するアームを提供する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5,402,582号明細書
【特許文献2】米国特許第5,611,147号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
現在のAACMMにおいては、エンコーダデータを含む測定データが収集され、関節アームCMM内に配置されたアームバスに沿って送信される。単一のバスを使用することの欠点は、バス速度およびバス幅などのバスの特性が、エンコーダおよびエンコーダデータの要求によって規定されることである。単一のバスを使用することの別の欠点は、アームバスで送信可能な非エンコーダデータの量が、エンコーダデータによって使用される容量を考慮した後のアームバスの残りの容量によって制限されることである。既存のAACMMはそれらのAACMMの意図される目的に適してはいるが、必要とされるのは、改善されたアームバスを提供するための本発明の実施形態の特定の特徴を有する可搬型のAACMMである。
【課題を解決するための手段】
【0007】
一実施形態は、可搬型の関節アーム座標測定機(AACMM)である。AACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部を含む。AACMMは、第1の端部および電子回路に結合された測定デバイスも含む。電子回路は、少なくとも1つの位置トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、測定デバイスと第1の端部の間に配置されたプローブ端、プローブ端に取り外し可能なように結合されたアクセサリデバイス、エンコーダデータバス、および第1のデバイスデータバスをさらに含む。エンコーダデータバスは、少なくとも1つのトランスデューサおよび電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。
【0008】
別の実施形態は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部を含む可搬型のAACMMである。AACMMは、第1の端部および電子回路に結合された測定デバイスも含む。電子回路は、少なくとも1つの位置トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、測定デバイスと第1の端部の間に配置されたプローブ端、エンコーダデータバス、および第1のデバイスデータバスをさらに含む。エンコーダデータバスは、少なくとも1つのトランスデューサおよび電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、測定デバイスおよび電子回路に結合される。第1のデバイスデータバスは、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。
【0009】
さらなる実施形態は、可搬型のAACMMを動作させる方法である。方法は、エンコーダデータバスを介して位置信号を受信するステップを含む。受信するステップは、可搬型のAACMMの電子回路による。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部を含む。可搬型のAACMMは、第1の端部に結合された測定デバイス、測定デバイスと第1の端部の間に配置されたプローブ端、プローブ端に取り外し可能なように結合されたアクセサリデバイス、電子回路、少なくとも1つの位置トランスデューサおよび電子回路と通信しているエンコーダデータバス、ならびにアクセサリデバイスおよび電子回路と通信しているデバイスデータバスをさらに含む。アクセサリデバイスデータが、電子回路で受信される。アクセサリデバイスデータは、デバイスデータバスを介してアクセサリデバイスから受信される。デバイスデータバスは、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作する。
【0010】
ここで図面を参照して、本開示の範囲全体に関して限定的であると解釈されるべきでなく、要素がいくつかの図で同様に付番されている例示的な実施形態が示される。
【図面の簡単な説明】
【0011】
【図1A】図1Aおよび1Bを含む、本発明のさまざまな態様の実施形態を中に有する可搬型の関節アーム座標測定機(AACMM)の斜視図である。
【図1B】図1Aおよび1Bを含む、本発明のさまざまな態様の実施形態を中に有する可搬型の関節アーム座標測定機(AACMM)の斜視図である。
【図2A】一緒に作られた図2A〜2Dを含む、一実施形態による、図1のAACMMの一部として利用される電子機器の構成図である。
【図2B】一緒に作られた図2A〜2Dを含む、一実施形態による、図1のAACMMの一部として利用される電子機器の構成図である。
【図2C】一緒に作られた図2A〜2Dを含む、一実施形態による、図1のAACMMの一部として利用される電子機器の構成図である。
【図2D】一緒に作られた図2A〜2Dを含む、一実施形態による、図1のAACMMの一部として利用される電子機器の構成図である。
【図3A】一緒に作られた図3Aおよび3Bを含む、一実施形態による、図2の電子データ処理システムの詳細な特徴を示す構成図である。
【図3B】一緒に作られた図3Aおよび3Bを含む、一実施形態による、図2の電子データ処理システムの詳細な特徴を示す構成図である。
【図4】図1のAACMMのプローブ端の等角図である。
【図5】ハンドルが結合されている図4のプローブ端の側面図である。
【図6】ハンドルが装着された図4のプローブ端の部分的な側面図である。
【図7】図6のプローブ端のインターフェース部分の拡大された部分的な側面図である。
【図8】図5のプローブ端のインターフェース部分の別の拡大された部分的な側面図である。
【図9】図4のハンドルの部分的に断面図である等角図である。
【図10】レーザラインプローブデバイスが装着された図1のAACMMのプローブ端の等角図である。
【図11】図10のレーザラインプローブの部分的に断面図である等角図である。
【図12】別の取り外し可能なデバイスが装着された図1のAACMMのプローブ端の等角図である。
【図13】ペイントスプレーデバイスが装着された図1のAACMMのプローブ端の等角図である。
【図14A】図14A〜図14Cを含む、本発明の一実施形態による、アームの位置および向きに応じて、部品の特徴と位置合わせされたままであるように調整され得る投影画像の図である。
【図14B】図14A〜図14Cを含む、本発明の一実施形態による、アームの位置および向きに応じて、部品の特徴と位置合わせされたままであるように調整され得る投影画像の図である。
【図14C】図14A〜図14Cを含む、本発明の一実施形態による、アームの位置および向きに応じて、部品の特徴と位置合わせされたままであるように調整され得る投影画像の図である。
【図15A】図15A〜15Bを含む、投影画像がプローブの手引きおよび状態情報を含む、画像が投影された部品の表面の図である。
【図15B】図15A〜15Bを含む、投影画像がプローブの手引きおよび状態情報を含む、画像が投影された部品の表面の図である。
【図16】2つのプロジェクタがプローブ端に取り付けられ、第3のプロジェクタがAACMMの別の部分に取り付けられたAACMMの斜視図である。
【図17】2つのプロジェクタがプローブ端に取り付けられた別のAACMMの斜視図である。
【図18】プロジェクタが部品の表面に画像を投影し、投影画像が部品の表面の裏の隠された特徴を含む、プロジェクタがプローブ端に取り付けられたAACMMの斜視図である。
【図19】一実施形態による、AACMMのアームバスの構成図である。
【図20】一実施形態による、AACMMにおけるデータ取り込みのプロセスフローの図である。
【図21】一実施形態による、エンコーダデータバスおよびデバイスデータバス上の同時データ取り込みのプロセスフローの図である。
【発明を実施するための形態】
【0012】
本発明の一実施形態は、AACMM内でデータを送信するための、互いに独立して動作する複数のアームバスを含む改善されたAACMMを提供する。
【0013】
図1Aおよび1Bは、本発明のさまざまな実施形態によるAACMM100を全体的に示し、関節アームは、座標測定機の一種である。図1Aおよび1Bに示されるように、例示的なAACMM100は、一端でAACMM100のアーム部104に結合された測定プローブ筐体102を含むプローブ端401を有する6または7軸関節測定デバイスを含み得る。アーム部104は、軸受カートリッジ(例えば、2つの軸受カートリッジ)の第1の群110によって第2のアームセグメント108に結合された第1のアームセグメント106を含む。軸受カートリッジ(例えば、2つの軸受カートリッジ)の第2の群112は、第2のアームセグメント108を測定プローブ筐体102に結合する。軸受カートリッジ(例えば、3つの軸受カートリッジ)の第3の群114は、第1のアームセグメント106を、AACMM100のアーム部104の他端に配置された基部116に結合する。軸受カートリッジの各群110、112、114は、関節による動作の複数の軸を提供する。また、プローブ端401は、AACMM100の第7の軸部のシャフト(例えば、AACMM100の第7の軸内の測定デバイス、例えば、プローブ118の動作を決定するエンコーダシステムを含むカートリッジ)を含む測定プローブ筐体102を含み得る。この実施形態において、プローブ端401は、測定プローブ筐体102の中心を通って延びる軸周りで回転し得る。AACMM100を使用する際、基部116は、通常、作業台に固定される。
【0014】
各軸受カートリッジの群110、112、114の中の各軸受カートリッジは、通常、エンコーダシステム(例えば、光学式の角度エンコーダシステム)を含む。エンコーダシステム(すなわち、トランスデューサ)は、基部116に対するプローブ118の位置(および、ひいては、特定の基準系、例えば、局所または大域基準系におけるAACMM100によって測定されている物体の位置)をすべてが一緒になって示すそれぞれのアームセグメント106、108および対応する軸受カートリッジの群110、112、114の位置を示す。アームセグメント106、108は、例えば、これに限定されないが、炭素複合材料などの好適な剛性のある材料で作製され得る。関節による動作の6つまたは7つの軸(すなわち、自由度)を有する可搬型のAACMM100は、オペレータによって簡単に扱われ得るアーム部104を提供しながら、オペレータが基部116周りの360度の領域内の所望の位置にプローブ118を位置付けることを可能にする利点をもたらす。しかし、2つのアームセグメント106、108を有するアーム部104の例は例示を目的とするものであり、特許請求される発明はそのように限定されるべきでないことを理解されたい。AACMM100は、軸受カートリッジによって一緒に結合された任意の数のアームセグメント(および、ひいては、6つもしくは7つを超えるか、または6つもしくは7つ未満の関節による動作の軸または自由度)を持つ可能性がある。
【0015】
プローブ118は、測定プローブ筐体102に取り外し可能なように取り付けられ、測定プローブ筐体102は、軸受カートリッジの群112に接続される。ハンドル126は、例えば、クイック接続インターフェース(quick−connect interface)により測定プローブ筐体102に対して取り外し可能である。ハンドル126は、別のデバイス(例えば、レーザラインプローブ、バーコードリーダ)で置き換えられることができ、それによって、オペレータが同じAACMM100で異なる測定デバイスを使用することを可能にする利点をもたらす。例示的な実施形態において、プローブ筐体102は、接触式の測定デバイスであり、測定されるべき物体に物理的に接触する、ボール形の、タッチセンシティブな、湾曲した、および伸長式のプローブを含むがこれらに限定されない異なるチップ118を有する可能性がある取り外し可能なプローブ118を収容する。その他の実施形態において、測定は、例えば、レーザラインプローブ(LLP)などの非接触式のデバイスによって実行される。一実施形態において、ハンドル126は、クイック接続インターフェースを使用してLLPで置き換えられる。その他の種類の測定デバイスが、追加的な機能を提供するために取り外し可能なハンドル126を置き換える可能性がある。そのような測定デバイスの例は、例えば、1つ以上の照明、温度センサ、熱スキャナ、バーコードスキャナ、プロジェクタ、ペイントスプレーヤ、カメラなどを含むがこれらに限定されない。
【0016】
図1Aおよび1Bに示されるように、AACMM100は、軸受カートリッジの群112から測定プローブ筐体102を取り外すことなしにアクセサリまたは機能が変更されることを可能にする利点をもたらす取り外し可能なハンドル126を含む。図2に関して以下でより詳細に検討されるように、取り外し可能なハンドル126は、電力およびデータが、ハンドル126、およびプローブ端401に配置された対応する電子機器とやりとりされることを可能にする電気コネクタも含み得る。
【0017】
さまざまな実施形態において、軸受カートリッジの各群110、112、114は、AACMM100のアーム部104が複数の回転軸周りを動くことを可能にする。述べられたように、各軸受カートリッジの群110、112、114は、例えばアームセグメント106、108の対応する回転軸と同軸上にそれぞれが配置された、例えば光学式の角度エンコーダなどの対応するエンコーダシステムを含む。光学式のエンコーダシステムは、本明細書において以下でより詳細に説明されるように、例えば、対応する軸周りのアームセグメント106、108のそれぞれのアームセグメントの回転する(スイベルの)または横の(蝶番の)動きを検出し、AACMM100内の電子データ処理システムに信号を送信する。それぞれの個々の処理されていないエンコーダのカウントが信号として電子データ処理システムに別々に送信され、電子データ処理システムにおいて、そのカウントは測定データへとさらに処理される。同一出願人による米国特許第5,402,582(‘582)号に開示されているような、AACMM100自体から分離した位置計算機(例えば、シリアルボックス)は必要とされない。
【0018】
基部116は、装着デバイスまたは取り付けデバイス120を含み得る。取り付けデバイス120は、AACMM100が、例えば、検査台、マシニングセンタ、壁、または床などの所望の位置に取り外し可能なように取り付けられることを可能にする。一実施形態において、基部116は、AACMM100が移動されているときにオペレータが基部116を持つのに都合の良い位置を提供するハンドル部122を含む。一実施形態において、基部116は、折りたたむとディスプレイスクリーンなどのユーザインターフェースが見えるようになる可動式のカバー部124をさらに含む。
【0019】
一実施形態によれば、可搬型のAACMM100の基部116は、2つの主要なコンポーネント、すなわち、AACMM100内のさまざまなエンコーダシステムからのデータ、および3次元(3D)位置計算をサポートするためのその他のアームパラメータを表すデータを処理する基部処理システムと、比較的完全な計測機能が外部コンピュータへの接続を必要とせずにAACMM100内で実施されることを可能にする、搭載オペレーティングシステム、タッチスクリーンディスプレイ、および常駐アプリケーションソフトウェアを含むユーザインターフェース処理システムとを含む電子データ処理システムを含むまたは収容する。
【0020】
基部116内の電子データ処理システムは、基部116から離れて配置されたエンコーダシステム、センサ、およびその他の周辺ハードウェア(例えば、AACMM100上の取り外し可能なハンドル126に取り付けられることができるLLP)と通信することができる。これらの周辺ハードウェアデバイスまたは特徴をサポートする電子機器は、可搬型のAACMM100内に配置された軸受カートリッジの群110、112、114のそれぞれに配置され得る。
【0021】
図2は、一実施形態による、AACMM100で利用される電子機器の構成図である。図2に示される実施形態は、基部処理システムを実装するための基部プロセッサ基板204と、ユーザインターフェース基板202と、電力を供給するための基部電源基板206と、Bluetoothモジュール232と、基部傾斜基板208とを含む電子データ処理システム210を含む。ユーザインターフェース基板202は、ユーザインターフェース、表示、および本明細書において説明されるその他の機能を実行するアプリケーションソフトウェアを実行するためのコンピュータプロセッサを含む。
【0022】
図2に示されるように、電子データ処理システム210は、1つ以上のアームバス218を介して上述の複数のエンコーダシステムと通信している。図2に示された実施形態において、各エンコーダシステムは、エンコーダデータを生成し、エンコーダアームバスインターフェース214と、エンコーダデジタル信号プロセッサ(DSP)216と、エンコーダ読み取りヘッドインターフェース234と、温度センサ212とを含む。歪みセンサなどのその他のデバイスが、アームバス218に装着され得る。
【0023】
さらに図2に示されているのは、アームバス218と通信しているプローブ端電子機器230である。プローブ端電子機器230は、プローブ端DSP228と、温度センサ212と、一実施形態においてはクイック接続インターフェースによってハンドル126またはLLP242に接続するハンドル/LLPインターフェースバス240と、プローブインターフェース226とを含む。クイック接続インターフェースは、LLP242およびその他のアクセサリによって使用されるデータバス、制御線、および電源バスへのハンドル126によるアクセスを可能にする。一実施形態において、プローブ端電子機器230は、AACMM100の測定プローブ筐体102に配置される。一実施形態において、ハンドル126は、クイック接続インターフェースから取り外されることができ、測定は、ハンドル/LLPインターフェースバス240を介してAACMM100のプローブ端電子機器230と通信するレーザラインプローブ(LLP)242によって実行される可能性がある。一実施形態において、電子データ処理システム210は、AACMM100の基部116に配置され、プローブ端電子機器230は、AACMM100の測定プローブ筐体102に配置され、エンコーダシステムは、軸受カートリッジの群110、112、114に配置される。プローブインターフェース226は、1−wire(登録商標)通信プロトコル236を実施する、Maxim Integrated Products,Inc.から販売されている製品を含む任意の好適な通信プロトコルによってプローブ端DSP228に接続することができる。
【0024】
図3は、一実施形態による、AACMM100の電子データ処理システム210の詳細な特徴を示す構成図である。一実施形態において、電子データ処理システム210は、AACMM100の基部116に配置され、基部プロセッサ基板204と、ユーザインターフェース基板202と、基部電源基板206と、Bluetoothモジュール232と、基部傾斜モジュール208とを含む。
【0025】
図3に示される実施形態において、基部プロセッサ基板204は、図中に示されるさまざまな機能ブロックを含む。例えば、基部プロセッサ機能302は、AACMM100からの測定データの収集をサポートするために利用され、アームバス218およびバス制御モジュール機能308を介して処理されていないアームデータ(例えば、エンコーダシステムのデータ)を受信する。メモリ機能304は、プログラムおよび静的なアーム構成データを記憶する。基部プロセッサ基板204は、LLP242などの任意の外部ハードウェアデバイスまたはアクセサリと通信するための外部ハードウェアオプションポート機能310も含む。リアルタイムクロック(RTC)およびログ306と、バッテリパックインターフェース(IF)316と、診断ポート318とが、図3に示される基部プロセッサ基板204の実施形態の機能にやはり含まれる。
【0026】
また、基部プロセッサ基板204は、外部(ホストコンピュータ)および内部(ディスプレイプロセッサ202)デバイスとのすべての有線および無線データ通信を管理する。基部プロセッサ基板204は、(例えば、米国電気電子学会(IEEE)1588などのクロック同期規格を用いて)イーサネット機能320を介してイーサネットネットワークと、LAN機能322を介して無線ローカルエリアネットワーク(WLAN)と、およびパラレルシリアル通信(PSC)機能314を介してBluetoothモジュール232と通信する能力を有する。基部プロセッサ基板204は、ユニバーサルシリアルバス(USB)デバイス312への接続も含む。
【0027】
基部プロセッサ基板204は、上述の‘582号特許のシリアルボックスで開示されたようないかなる前処理も必要とせずに測定データへと処理するために、処理されていない測定データ(例えば、エンコーダシステムのカウント、温度の読み取り値)を送信および収集する。基部プロセッサ204は、RS485インターフェース(IF)326を介してユーザインターフェース基板202のディスプレイプロセッサ328に処理されたデータを送信する。一実施形態において、基部プロセッサ204は、処理されていない測定データを外部コンピュータにやはり送信する。
【0028】
ここで図3のユーザインターフェース基板202に目を向けると、基部プロセッサによって受信された角度および位置データが、AACMM100内の自律的な計測システムを提供するためにディスプレイプロセッサ328で実行されるアプリケーションによって利用される。アプリケーションは、これらに限定されないが、特徴の測定、手引きおよび訓練のグラフィックス、遠隔診断、温度の修正、さまざまな動作の特徴の制御、さまざまなネットワークへの接続、ならびに測定された物体の表示などの機能をサポートするためにディスプレイプロセッサ328で実行され得る。ディスプレイプロセッサ328および液晶ディスプレイ(LCD)338(例えば、タッチスクリーンLCD)ユーザインターフェースとともに、ユーザインターフェース基板202は、セキュアデジタル(SD)カードインターフェース330と、メモリ332と、USBホストインターフェース334と、診断ポート336と、カメラポート340と、音声/映像インターフェース342と、ダイヤルアップ/セルモデム344と、全地球測位システム(GPS)ポート346とを含むいくつかのインターフェースオプションを含む。
【0029】
図3に示される電子データ処理システム210は、環境データを記録するための環境レコーダ362を有する基部電源基板206も含む。また、基部電源基板206は、AC/DCコンバータ358およびバッテリ充電器制御360を用いて、電子データ処理システム210に電力を供給する。基部電源基板206は、集積回路間(inter−integrated circuit)(I2C)シリアルシングルエンドバス354を用いて、およびDMAシリアル周辺インターフェース(DMA serial peripheral interface)(DSPI)356を介して基部プロセッサ基板204と通信する。基部電源基板206は、基部電源基板206に実装された入力/出力(I/O)拡張機能364を介して傾斜センサおよび無線周波数識別(RFID)モジュール208に接続される。
【0030】
別個のコンポーネントとして示されているが、その他の実施形態において、これらのコンポーネントのすべてまたは一部は、図3に示された位置とは異なる位置に物理的に配置される、および/または図3に示された方法とは異なる方法で組み合わされた機能である可能性がある。例えば、一実施形態において、基部プロセッサ基板204およびユーザインターフェース基板202は、1つの物理的な基板に組み合わされる。
【0031】
ここで図4〜9を参照すると、取り外し可能で交換可能なデバイス400がAACMM100に結合することを可能にするクイック接続機械的および電気的インターフェース(quick−connect mechanical and electrical interface)を有する測定プローブ筐体102を持つプローブ端401の例示的な実施形態が、示されている。例示的な実施形態において、デバイス400は、例えばピストルの握りのようにオペレータの手で握られるように大きさおよび形状を決められるハンドル部404を含む格納カバー402を含む。格納カバー402は、空洞406を有する薄壁構造物である(図9)。空洞406は、コントローラ408を受けるように大きさを決められ、構成される。コントローラ408は、例えばマイクロプロセッサを有するデジタル回路であるか、またはアナログ回路である可能性がある。一実施形態において、コントローラ408は、電子データ処理システム210(図2および3)と非同期双方向通信をしている。コントローラ408と電子データ処理システム210の間の通信接続は、(例えば、コントローラ420を介した)有線である可能性があるか、または直接的もしくは間接的な無線接続(例えば、BluetoothもしくはIEEE802.11)、または有線接続と無線接続の組み合わせである可能性がある。例示的な実施形態において、格納カバー402は、例えば、射出成形プラスチック材料などから2つの半分410、412で形成される。半分410、412は、例えば、ねじ414などの締め具によって1つに固定され得る。その他の実施形態において、格納カバーの半分410、412は、例えば、接着剤または超音波溶接によって1つに固定され得る。
【0032】
ハンドル部404は、オペレータによって手動で作動され得るボタンまたは作動装置416、418も含む。作動装置416、418は、プローブ筐体102内のコントローラ420に信号を送信するコントローラ408に結合される。例示的な実施形態において、作動装置416、418は、プローブ筐体102のデバイス400とは反対側に配置された作動装置422、424の機能を実行する。デバイス400は、デバイス400、AACMM100を制御するためにやはり使用され得る追加的なスイッチ、ボタン、またはその他の作動装置を有する可能性があり、またはその逆の可能性もあることを理解されたい。また、デバイス400は、例えば、発光ダイオード(LED)、音源、メータ、ディスプレイ、または計器などのインジケータを含み得る。一実施形態において、デバイス400は、点の測定と同時に口頭のコメントを残すことを可能にするデジタルボイスレコーダを含み得る。さらに別の実施形態において、デバイス400は、オペレータが音声による作動コマンドを電子データ処理システム210に送信することを可能にするマイクロホンを含む。
【0033】
一実施形態において、ハンドル部404は、オペレータの両手で使用されるように、または特定の手(例えば、左利きまたは右利き)用に構成され得る。ハンドル部404は、障害を持ったオペレータ(例えば、指の欠けたオペレータまたは義手を着けたオペレータ)を助けるように構成されることもできる。さらに、ハンドル部404は、空間的ゆとりが限られるときには取り外されることができ、プローブ筐体102が単体で使用されることができる。上で検討されたように、プローブ端401は、AACMM100の第7の軸のシャフトも含み得る。この実施形態において、デバイス400は、AACMMの第7の軸周りで回転するように構成され得る。
【0034】
プローブ端401は、プローブ筐体102の第2のコネクタ428と協力するデバイス400の第1のコネクタ429(図8)を有する機械的および電気的インターフェース426を含む。コネクタ428、429は、デバイス400のプローブ筐体102への結合を可能にする電気的および機械的特徴を含み得る。一実施形態において、インターフェース426は、機械的結合部432および電気コネクタ434を上に有する第1の表面430を含む。格納カバー402は、第1の表面430に近接して配置され、第1の表面430から段差を付けられた第2の表面436も含む。例示的な実施形態において、第2の表面436は、第1の表面430から約0.5インチ差の段差を付けられた平面である。以下でより詳細に検討されるように、この段差は、カラー438などの締め具を締めるかまたは緩めるときにオペレータの指のためのゆとりをもたらす。インターフェース426は、コネクタのピンを位置合わせすることを必要とせずに、および別個のケーブルまたはコネクタを必要とせずに、デバイス400とプローブ筐体102の間の比較的迅速で安定した電子的接続を提供する。
【0035】
電気コネクタ434は、第1の表面430から延び、例えば、1つ以上のアームバス218などを介して電子データ処理システム210(図2および3)と非同期双方向通信するように電気的に結合される1つ以上のコネクタピン440を含む。双方向通信接続は、(例えば、アームバス218を介した)有線、無線(例えば、BluetoothもしくはIEEE802.11)、または有線接続と無線接続の組み合わせである可能性がある。一実施形態において、電気コネクタ434は、コントローラ420に電気的に結合される。コントローラ420は、例えば、1つ以上のアームバス218などを介して電子データ処理システム210と非同期双方向通信している可能性がある。電気コネクタ434は、プローブ筐体102の電気コネクタ442と比較的迅速で安定した電子的接続を行うように配置される。電気コネクタ434、442は、デバイス400がプローブ筐体102に装着されるときに互いに接続する。電気コネクタ434、442は、それぞれ、電磁干渉からの遮蔽、ならびにコネクタピンの保護、およびデバイス400をプローブ筐体102に装着するプロセス中のピンの位置合わせの補助を提供する金属で覆われたコネクタ筐体を含み得る。
【0036】
機械的結合部432は、AACMM100のアーム部104の端部のデバイス400の位置がずれないまたは動かないことが好ましい比較的厳密な用途をサポートするために、デバイス400とプローブ筐体102の間の比較的強固な機械的結合を提供する。概して、すべてのそのような動きは、測定結果の精度の望ましくない低下を招く可能性がある。これらの所望の結果は、本発明の実施形態のクイック接続機械的および電子的インターフェース(quick connect mechanical and electronic interface)の機械的装着構成部分のさまざまな構造的特徴を用いて達成される。
【0037】
一実施形態において、機械的結合部432は、一端448(デバイス400の前縁または「最前部」)に配置された第1の凸部444を含む。第1の凸部444は、第1の凸部444から延びるへり446を形成する鍵型にされた、切欠きを入れられた、または傾斜を付けられたインターフェースを含み得る。へり446は、プローブ筐体102から延びる凸部452によって画定される溝450(図8)に受けられるように大きさを決められる。第1の凸部444および溝450は、へり446が溝450内に位置付けられるときに、溝450が、プローブ筐体102に装着されるときのデバイス400の長手方向と横方向の両方の動きを制限するために使用され得るような結合部構成をカラー438とともに形成することを理解されたい。以下でより詳細に検討されるように、カラー438の回転が、へり446をスロット450内に固定するために使用され得る。
【0038】
第1の凸部444の反対側に、機械的結合部432は、第2の凸部454を含み得る。第2の凸部454は、鍵型にされた、切欠きを入れられたへりの、または傾斜を付けられたインターフェース表面456(図5)を有する可能性がある。第2の凸部454は、例えば、カラー438などの、プローブ筐体102に関連する締め具を係合するように配置される。以下でより詳細に検討されるように、機械的結合部432は、インターフェース426のための支点を提供する、電気コネクタ434に近接する、または電気コネクタ434周りに配置された、表面430から突出する持ち上げられた表面を含む(図7および8)。これは、デバイス400がプローブ筐体102に装着されるときに、デバイス400とプローブ筐体102の間の3つの機械的接点のうちの第3の接点として機能する。
【0039】
プローブ筐体102は、同軸上に配置されたカラー438を一端に含む。カラー438は、第1の位置(図5)と第2の位置(図7)の間を動くことができるねじ部を含む。カラー438を回転することによって、カラー438は、外部の道具を必要とせずにデバイス400を固定するか、または取り外すために使用され得る。カラー438の回転は、比較的間隔の広い角ねじ山が切られた円筒474に沿ってカラー438を動かす。そのような比較的大きなサイズの角ねじおよび外形表面の使用は、最小限の回転トルクによって非常に大きな締め付け力をもたらす。さらに、円筒474のねじの広いピッチは、カラー438が最小限の回転で締められるか、または緩められることを可能にする。
【0040】
デバイス400をプローブ筐体102に結合するために、へり446が溝450に挿入され、デバイスは、第2の凸部454を矢印464(図5)に示されるように表面458に向かって回転するように旋回させられる。カラー438が回転され、カラー438を矢印462によって示される方向に動かすかまたは平行移動させ、表面456と係合させる。角度の付いた表面456に対するカラー438の動きは、機械的結合部432を持ち上げられた表面460に向かって押しやる。これは、デバイス400をプローブ筐体102に強固に固定することを妨げる可能性があるインターフェースの変形またはインターフェースの表面の異物の起こり得る問題を克服するのに役立つ。カラー438によって第2の凸部454に力を加えることは、機械的結合部432を前に動かし、へり446を押してプローブ筐体102に固定する。カラー438が締められ続けるにつれて、第2の凸部454は、プローブ筐体102に向かって上向きに押され、支点に圧力をかける。これは、シーソー型の構成をもたらし、圧力を第2の凸部454、へり446、および中央の支点に加えて、デバイス400のずれまたは揺れを軽減するかまたは取り除く。支点は、プローブ筐体102の底を直接押し、一方、へり446は、プローブ筐体102の端部に下向きの力をかける。図5は、デバイス400およびカラー438の動きの方向を示す矢印462、464を含む。図7は、カラー438が締められるときにインターフェース426内でかけられる圧力の方向を示す矢印466、468、470を含む。デバイス400の表面436の段差が、カラー438と表面436の間の間隙472(図6)をもたらすことを理解されたい。間隙472は、カラー438が回転されるときに指を挟む危険性を軽減しながら、オペレータがカラー438をよりしっかりと握ることを可能にする。一実施形態において、プローブ筐体102は、カラー438が締められるときの変形を軽減するかまたは防止するのに十分なだけの剛性がある。
【0041】
インターフェース426の実施形態は、機械的結合部432および電気コネクタ434の適切な位置合わせを可能にし、さらに、もし保護しなかった場合にはカラー438、へり446、および表面456の締め付け動作によって生じる可能性がある加えられる力から電子機器のインターフェースを保護する。これは、はんだ付けされた端子を有する可能性がある回路基板476に取り付けられた電気コネクタ434、442に対する力による損傷を軽減するかまたは取り除く利点をもたらす。また、実施形態は、ユーザがデバイス400をプローブ筐体102に接続するか、またはプローブ筐体102から切り離すために道具が必要とされないという点で、知られている手法に優る利点をもたらす。これは、オペレータが手動で比較的簡単にデバイス400をプローブ筐体102に接続し、プローブ筐体102から切り離すことを可能にする。
【0042】
インターフェース426によって可能な比較的多数の遮蔽された電気接続のおかげで、比較的多数の機能が、AACMM100とデバイス400の間で共有され得る。例えば、AACMM100に配置されたスイッチ、ボタン、またはその他の作動装置が、デバイス400を制御するために使用される可能性があり、またはその逆の可能性もある。さらに、コマンドおよびデータが、電子データ処理システム210からデバイス400に送信され得る。一実施形態において、デバイス400は、基部プロセッサ204のメモリに記憶されるべき、またはディスプレイ328に表示されるべき記録された画像のデータを送信するビデオカメラである。別の実施形態において、デバイス400は、電子データ処理システム210からデータを受信する画像プロジェクタである。さらに、AACMM100またはデバイス400のどちらかに配置された温度センサが、他方によって共有される可能性がある。本発明の実施形態は、多種多様なアクセサリデバイス400がAACMM100に迅速、簡単、かつ確実に結合されることを可能にする柔軟なインターフェースを提供する利点をもたらすことを理解されたい。さらに、AACMM100とデバイス400の間で機能を共有する能力は、重複をなくすことによってAACMM100のサイズ、電力消費、および複雑性を削減することを可能にし得る。
【0043】
一実施形態において、コントローラ408は、AACMM100のプローブ端401の動作または機能を変更する可能性がある。例えば、コントローラ408は、デバイス400が装着されるときと、プローブ筐体102が単体で使用されるときとの異なるときに異なる色の光を放つ、異なる強さの光を放つ、または点く/消えるのいずれかを行うようにプローブ筐体102のインジケータライトを変更する可能性がある。一実施形態において、デバイス400は、物体までの距離を測定する距離測定センサ(図示せず)を含む。この実施形態において、コントローラ408は、物体がプローブチップ118からどのぐらい遠いかをオペレータに示すためにプローブ筐体102のインジケータライトを変更する可能性がある。これは、コントローラ420の要件を簡素化する利点をもたらし、アクセサリデバイスの追加による機能のアップグレードまたは向上を可能にする。
【0044】
図10〜11を参照すると、本発明の実施形態が、レーザラインプローブ(LLP)スキャンデバイス500用のカメラ、信号処理、制御、およびインジケータインターフェースに利点をもたらす。LLP500は、ハンドル部504を有する格納カバー502を含む。さらに、LLP500は、LLP500を本明細書において上で説明されたようにプローブ筐体102に機械的および電気的に結合するインターフェース426を一端に含む。インターフェース426は、LLP500が、追加的な道具を必要とせずに迅速かつ簡単にAACMM100に結合され、AACMM100から取り外されることを可能にする。インターフェース426の近くに、格納カバー502は、例えばレーザデバイスなどの光学式デバイス510と、センサ508とを含む部分506を含む。センサ508は、例えば、電荷結合素子(CCD)型のセンサまたは相補型金属酸化膜半導体(CMOS)型のセンサである可能性がある。例示的な実施形態において、光学式デバイス510およびセンサ508は、センサ508が所望の焦点で光学式デバイス510からの反射光を検出することができるように角度を付けて配置される。一実施形態において、光学式デバイス510およびセンサ508の焦点は、LLP500がプローブチップ118に邪魔されずに操作され得るようにプローブチップ118からずらされる。換言すれば、LLP500は、プローブチップ118を所定の位置に置いたまま操作され得る。さらに、LLP500は、プローブチップ118に対して相対的に実質的に固定され、ハンドル部504への力は、LLP500のプローブチップ118に対する相対的な配置に影響を与えない可能性があることを理解されたい。一実施形態において、LLP500は、オペレータがLLP500からのデータ取得とプローブチップ118からのデータ取得の間を切り替えることを可能にする追加的な作動装置(図示せず)を有する可能性がある。
【0045】
光学式デバイス510およびセンサ508は、格納カバー502内に配置されたコントローラ512に電気的に結合される。コントローラ512は、1つ以上のマイクロプロセッサ、デジタル信号プロセッサ、メモリ、および信号調整回路を含み得る。LLP500によってもたらされるデジタル信号処理および大きなデータ量のために、コントローラ512は、ハンドル部504内に配置される可能性がある。コントローラ512は、電気コネクタ434を介してアームバス218に電気的に結合される。LLP500は、LLP500による動作およびデータの取り込みを開始するためにオペレータによって手動で作動され得る作動装置514、516をさらに含む。
【0046】
本発明のその他の実施形態においては、AACMM100に結合されたデバイス600(図12)が、機能的デバイス602を含み得る。デバイス600の種類に応じて、機能的デバイス602は、スチルカメラ、ビデオカメラ、バーコードスキャナ、熱スキャナ、光源(例えば、フラッシュ装置)、または画像プロジェクタである可能性がある。一実施形態において、機能的デバイス602は、その全体を本願に援用する「Apparatus and Method for Relocating an Articulating−Arm Coordinate Measuring Machine」と題した同一出願人による米国特許第7,804,602号に記載された再帰反射体ホルダーなどの再帰反射体ホルダーを含み得る。さらに別の実施形態において、機能的デバイス602は、その全体を本願に引用して援用する「Method of Constructing a 3−Dimensional Map of a Measurable Quantity Using Three Dimensional Coordinate Measuring Apparatus」と題した同一所有者による米国特許第5,412,880号に記載された超音波プローブなどの超音波プローブを含み得る。デバイス600は、デバイスがプローブ筐体102に電気的および機械的に結合されることを可能にするインターフェース426を含む。デバイス600は、機能的デバイス602に電気的に接続されたコントローラをさらに含む。コントローラは、電子データ処理システム210と非同期双方向通信するように構成される。双方向通信接続は、(例えば、アームバス218を介した)有線、無線(例えば、BluetoothまたはIEEE802.11)である可能性がある。一実施形態において、通信接続は、有線接続と無線接続の組み合わせであり、第1の信号の種類がコントローラ420を介した有線接続によって送信され、第2の信号の種類が無線接続によって送信される。機能的デバイス602が画像プロジェクタおよびレーザラインプローブなどの複数の機能を含む実施形態においては、画像(例えば、CAD)データが、画像プロジェクタに無線接続によって送信され得る一方、LLPの画像センサによって得られたデータは、有線接続によって送信される。これらのデバイスの統合は、オペレータが、より速く、より高い信頼度で測定値を得ることを可能にする利点をもたらす可能性があることを理解されたい。例えば、スチルカメラまたはビデオカメラデバイスを装着すると、オペレータは、デバイスによって測定されている物体の1つ以上の画像を記録することができる。これらの画像は、例えば、ディスプレイ328に表示されるか、または検査レポートに組み込まれることができる。一実施形態において、オペレータは、ユーザインターフェース基板202を介して、測定点を定義するために、表示された画像にグラフィカルなマーカを置くことができる。このようにして、オペレータは、メモリから印を付けられた画像を後で呼び出し、どこを測定すべきかをすぐに見ることができる。その他の実施形態において、測定されている物体のビデオが、取り込まれる。そして、このビデオは、オペレータが検査されるべき次の物体に対して複数の測定を繰り返すのを補助するために、または新しいオペレータのための訓練ツールとしてユーザインターフェース基板202によって再生される。
【0047】
さらに別の実施形態において、デバイスは、ペイントスプレーデバイス700(図13)である可能性がある。ペイントスプレーデバイス700は、ペイントスプレーデバイス700をプローブ筐体102に電気的および機械的に結合するインターフェース426を含む。この実施形態において、デバイス700は、電子データ処理システム210と通信するように構成されたコントローラを含む。通信接続は、(例えば、アームバス218を介した)有線、無線(例えば、BluetoothもしくはIEEE802.11)、または有線接続と無線接続の組み合わせである可能性がある。デバイス700のコントローラは、電子データ処理システム210から信号を受信し、それぞれが単一の色の塗料を有するタンク704(例えば、赤、緑、青)にそれぞれ接続される1つ以上のスプレーノズル702から1つ以上の色を選択的に噴射する。スプレーノズル702は、塗料、インク、顔料、または染料の小滴を表面に付着させるインクジェット式のスプレー機構であってもよいことを理解されたい。インクジェットノズルは、コンティニュアス型インクジェット、サーマル方式インクジェット、およびピエゾ方式インクジェットを含む可能性があるが、これらに限定されない。電子データ処理システム210はプローブ筐体102の位置および向きを知っているので、デバイスは、メモリに記憶された所望の画像に一致するように特定の位置で特定の色を噴射する命令を受信する可能性がある。したがって、オペレータがデバイス700を所望の表面(例えば、壁)を横切って動かすときに、画像または絵が、デバイス700によって再現され得る。この実施形態は、例えば板金などの物品にレイアウトの印を付ける、製造環境における利点ももたらし得る。
【0048】
図13は、タンク704をAACMM100の外部にあるように示すが、これは例示を目的とするものであり、特許請求される発明はそのように限定されるべきでないことを理解されたい。一実施形態において、タンク704は、デバイス700のハンドル内に配置される。別の実施形態において、タンク704は基部116内に配置され、導管がアーム104を通って延び、システムにいかなる外部の配線、管、または導管も設けない。
【0049】
ここで図12および図14〜18を参照すると、1つ以上の画像プロジェクタ602を組み込むデバイス600の実施形態が、示されている。本発明の実施形態によれば、1つ以上の比較的小型の販売されているプロジェクタ(例えば、「超小型」または「ピコ」プロジェクタ)604が、AACMM100のプローブ端401、またはAACMM100のその他のさまざまな位置(例えば、ハンドルの反対側、アームセグメント上)に取り付けられるか、接続されるか、またはその他の方法で装着され得る。図14A〜14Dに、デバイス600にハンドル126に近接して取り付けられたプロジェクタ604が、示されている。しかし、プロジェクタ604は、AACMM100の任意の場所に取り付けられる可能性があり、AACMM100と連携して利用される場合、レーザラインプローブに取り付けられる可能性がある。プロジェクタ604は、いくらかの処理能力を含む可能性がある。一実施形態において、プロジェクタ604は、電子データ処理システム210に接続されるか、または電子データ処理システム210と通信している。したがって、プロジェクタ604は、視覚的な手引き情報またはデータ(例えば、画像606)を与えられることができ、次に、プロジェクタ604は、その視覚的な手引き情報またはデータを、図14Bの「位置1」に示されるように、AACMM100のオペレータによって測定されるか、またはその他の作業をされるべき部品または物体608に投影する。
【0050】
部品608の向きがAACMM100の座標系内で調整されると、投影画像606の縮尺およびその投影画像606の見え方が、アーム104の位置データを用いてAACMM100の動きと同期され得る。部品608に投影された画像606は、デバイス600が動かされるときに、部品608に投影された画像606が動かず、オペレータに対して安定した画像を示すために縮尺と向きの両方を変更するように、プローブ端401の位置に応じてプロジェクタ604に関連するプロセッサによって、または電子データ処理システム210を介して調整され得る。これは、図14Cの「位置2」に見られ得る。例として、色の付いた(例えば、緑)円610が、測定されるべき部品の穴612と位置が合うように投影され得る。部品608に対するプローブの角度または距離が変更されるとき、投影画像606内の円610の位置が変わるが、円610は穴612上の位置に「ロックされた」ままであり、穴612と同じサイズのままである。これは、目標をロックオンし、追跡することに相当する。この構成の利点は、オペレータがAACMM100を動かすときに、オペレータが部品608から目を離してコンピュータスクリーン、ユーザインターフェース、またはその他の視覚的表示を見る必要がないことである。
【0051】
先行技術の単純な格子線とは対照的に部品608上の投影画像を使用することは、これらに限定されないが以下のものを含む広範な投影情報のオプションを提供する。(1)色の制御−−赤い円が、測定を成功裏に完了した後、緑に変わる可能性がある。マーカまたはグラフィックスの色が、部品608の色に対して高い視認性(コントラスト)をもたらすように変わり得る。(2)アニメーション−−マーカ、矢印、またはその他のインジケータが、動作を開始または終了するために点滅し、頻度を変え、交互に色を変えることができる。(3)テキスト−−メッセージ、データ、または寸法が、部品に投影され得る。通常はコンピュータスクリーン上に表示されるデジタル式の読み取り値が、部品608に投影され得る。(4)CAD画像−−注意書き、寸法、またはその他の情報とともに部品に重ね合わされ得る。測定されるべき特徴が、順次、色またはアニメーションで強調され得る。(5)写真−−(設計通りの)部品の実画像が、測定されるべき部品に投影され、開け忘れた穴または誤った位置の特徴などの違っているあらゆることをすぐに示すことができる。(「手引きをともなう投影」、図15A参照)。(6)範囲インジケータ−−LLP500のような非接触式のデバイスに関して、範囲インジケータ614が、部品の表面608に投影され得る。これらは、アニメーションされ、色を付けられる可能性があり、テキストおよび/またはデータを含み得る。
【0052】
AACMM100は、図15Aに示されるように、プロジェクタ604を使用してオペレータに対して手引きを提供することもできる。プロジェクタ604は、測定デバイス118が測定点を得るべき場所にインジケータ616をやはり重ね合わせながら、測定が行われるべき特徴612を円610で強調する、部品608上の画像を生成する。テキスト形式の指示618も、部品608に投影され、重ね合わされる可能性がある。部品もしくは物体608の測定、または部品608の完全な一群の測定を行った後、結果のインジケータ620が、図15Bに示されるように、部品608に直接投影され得る。これは、許容範囲内のおよび/または許容範囲外の部品の特定の特徴を強調するために使用され得る。表面のスキャンに関して、高い点および低い点が、色分けされ、部品608に直接投影され得る。寸法を示された特徴の測定に関して、グラフィカルなまたはテキスト形式のインジケータ622が、部品608に投影され、特徴が許容範囲内であるかどうか、および/または許容範囲外であるかどうかをオペレータに知らせることができる。上で検討されたように、これは、オペレータが目を離してコンピュータ端末またはユーザインターフェースを見る必要がないので、部品608の検査に必要とされる時間を削減する利点をもたらす。
【0053】
プロジェクタ604は、白色光を投影することによって作業領域を照らすために使用されることもでき、照明のサイズおよび形状が制御され得る。加えて、照明の領域は、スポットライトの位置およびサイズがプローブ端401の位置データを使用して制御され得るので、デバイス600が動かされる間、ロックされ得る。プロジェクタ604が部品608のどこも照らすことができないようにデバイス600が向きを決められる場合(例えば、天井を向いているとき)、プロジェクタ604は、自動的に消えるか、または黒くなる可能性がある。
【0054】
図16〜17を参照すると、本発明の別の態様の実施形態にしたがって、複数のプロジェクタ604、624、626が、AACMM100とともに使用され得る。実施形態は、プロジェクタ624が壁628または作業台を指すことである。ここで、プロジェクタ624は、例えば、基部116上など、AACMM100の固定された(動かない)部分の可動式の(例えば、スイベルの)取り付け具に装着され得る。プロジェクタ624からの画像630は、プローブ端401に取り付けられたプロジェクタ604からの情報と同じ情報か、またはプロジェクタ604からの情報とは異なる情報を表示することができる。画像630は、第2当事者による観察用である可能性があるか、または画像630は、搭載アプリケーションソフトウェアの表示または補助的なコンピュータの表示を複製する働きをする可能性がある。このようにして、データは、拡大され得る(すなわち、広げられたカバー領域)か、またはデータは、測定セッション中にオペレータによってより容易に見られる表面628に投影され得る。
【0055】
さらに、AACMM100のプローブ端401に取り付けられた複数のプロジェクタ604、626は、表面領域のカバー範囲または3D形状のカバー範囲を広げ、したがって、画像のカバー範囲から外れることなくプローブ端401の比較的大きな動きに対応することができる。画像の外形は、部品608の外形に合わせられ得る。
【0056】
図18を参照すると、本発明の別の態様の実施形態にしたがって、プロジェクタ604が取り付けられたAACMM100が、オペレータに対して視覚的な作業の手引きを提供することができる。そのような視覚的な作業の手引きは、表面またはその他の種類の障害物(例えば、壁または人間の皮膚)によって視界から隠されている物体または物品の特徴の視覚化の形態である可能性がある。例えば、プロジェクタ604は、アクセスされ、作業される必要がある、表面632の裏の1つ以上の物体634、636または物品を有するさまざまな表面632にCADデータ、CATスキャンデータ、レーザスキャンデータ、またはその他のデータを投影することができる。しかし、その他の物体に対する損傷が引き起こされないように、またはこれらの隠された物体634、636の位置を見つけることに浪費される時間を削減するために、作業者がこれらの物体の正確な位置を特定することが重要である。表面632は、作業されるべき特徴または物体を隠す壁、組立品、人体の表面、またはその他の種類の表面である可能性がある。
【0057】
図18は、壁の表面632に投影された画像638の例を示す。壁の表面632の裏には、間柱634、配管パイプ636、および電気配線などのさまざまな物品がある。しかし、作業者は、何が壁の表面632の裏に配置されているかを知らない可能性があり、および/または壁の表面632の裏のこれらの物品の配置を知らない。作業者に、壁の表面632の裏の物品およびそれらの物品の位置の画像を提供することが有利である。概して、隠された特徴についてのこの情報は、例えば、CADデータとして利用可能である。
【0058】
別の応用において、AACMM100は、例えば、手術室で使用され得る。医師が、可搬型のAACMMを使用して、プローブまたは測定デバイス118の位置とコンピュータ体軸断層撮影(Computer Axial Tomography)データからの3Dデータとの相関をとりながら、切開するためのまたは腫瘍を見つけるための位置を決定することができる。この場合、プロジェクタ604は、患者に画像を投影し、マーカ、またはCATスキャン画像のそのままの複製を提供して外科医を手引きすることができる。手動操作式のロボットによって遠隔で行われる手術は、上述したのと同じ方法で投影システムを使用することができる。
【0059】
AACMMが製造環境で使用される応用において、プロジェクタ604は、3D CADまたは画像ファイルによって制御される配置を必要とするさまざまなオペレーションのための手引きを提供し得る。これは、例えば、リベット、機器、アクセサリのために穴を開けることと、車、飛行機、バス、または大きな部品にステッカまたは裏に接着剤がついた帯を張り付けることと、文字、細部装飾、または画像を塗装することと、製図の要求に一致するまで表面または溶接部を研削/研磨することと、釘またはねじの位置に関して、外装の裏にある間柱または構造部材の位置を見つけることとを含む。
【0060】
本発明のこの態様の実施形態は、壁、隔壁、床の下、または鍵のかかったドアの裏のパイプ、配線、ダクト、またはその他の物体などの隠された特徴を視覚化し、どこが安全に切断できるかを判断するのを助ける。また、これらの実施形態は、(例えば、デバイスの3D CADデータが利用可能なときに)爆発物の危険なコンポーネントに穴を開ける、そのようなコンポーネントを切断する、およびそのようなコンポーネントにアクセスするための投影された視覚化および手引きを提供する。
【0061】
本発明のこの態様の実施形態によれば、AACMM用の投影システムが、部品の表面に手引きおよび部品のデータ(例えば、構造のCADデータ)を投影する。また、この投影システムは、建造物の改造、手術、またはその他の侵襲的な処置で使用するための、壁、構造物、または人体の内部にあるものの画像を投影するために使用され得る。アームに装着された1つ以上の小型プロジェクタが、部品もしくは表面に画像もしくはデータを投影するか、またはオペレータに対する手引きを提供することができる。アーム/プロジェクタの組み合わせは、壁の後ろ、人体の内側、爆発するデバイスの内側などの特徴を視覚化することができる。物体の3Dの記録(例えば、CADの図面、CATのスキャンなど)が存在するとき、プロジェクタとアームの組み合わせは、あたかも壁を透かして見るように特徴の位置を示す画像を投影することができる。
【0062】
図19を参照すると、アームバス218の実施形態が、全体的に示されている。図19のアームバス218は、バスA1904、バスB1905、バスC1906、トリガバス1907、および取り込みバス1908を含む。デバイスデータバス1902は、バスB1905およびバスC1906を含む。バスA1904は、エンコーダデータバスとも呼ばれる。本明細書において使用されるとき、用語「バス」および「配線」は、同期パルスおよび/またはデータなどの信号を送信するための伝送媒体を指すために交換可能なように使用される。
【0063】
図19は、2つの連続領域1909を示す。これらは、追加的なエンコーダアームバスIF214が挿入され得る領域である。例えば、AACMM100に7つのエンコーダアームバスIF214が存在する可能性がある。基部プロセッサ基板204を含むAACMM100の基部116は、図19の左側にある。プローブ端401および交換可能なデバイス(400、500、600、700など)は、図19の右側にある。
【0064】
取り込みバス1908は、データがすべてのAACMMのセンサデバイスによって同時に取り込まれるように、基部プロセッサ基板204からエンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラ(コントローラ408、512、または600、700内のコントローラなど)に取り込み信号(または同期パルス)を送信する。一実施形態において、図19に示された取り込みバス1908は、(例えば、約700ヘルツで動作する1つ以上の信号を有する)差動配線の対によって実装される。取り込みバス1908上の取り込み信号は、エンコーダDSP216と、プローブ端DSP228と、交換可能なデバイスのコントローラとにほとんど同時に到達する。その他の実施形態において、一群の差動配線の対が、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラのすべてに並列に接続される可能性がある。当業者に理解され得るように、取り込みバス1908の実装は、上述の実施形態に限定されず、これらに限定されないが、シングルエンド配線の使用、または異なる速度の配線の使用など、当技術分野で知られている任意の方法でやはり実装され得る。一実施形態において、取り込み信号の送信は、受信するDSPの基部プロセッサ204からの距離に基づいて時間差をつけられる。
【0065】
アームバス218の一部であるエンコーダデータバス1904およびデバイスデータバス1902は、独立にかつ同時に動作し、それによって、データがそれらのバスの両方で同時に送信されることを可能にする。取り込みバス1908上の取り込み信号は、AACMMのセンサデータを同時にラッチし、次に、それらのセンサデータが、エンコーダデータバス1904およびデバイスデータバス1902に送信される。一実施形態において、取り込み信号のレートは、AACMM100内のセンサデバイスからデータを収集し、処理するために必要とされる時間によって決められる。一実施形態において、エンコーダデータバス1904およびデバイスデータバス1902は、非同期バスである。一実施形態において、エンコーダデータバス1904およびデバイスデータバス1902は、無線バスである。
【0066】
エンコーダデータバス1904は、エンコーダDSP216のそれぞれを基部プロセッサ204に接続する。エンコーダデータバス1904は、例えば、エンコーダデータバス1904上で搬送される差動対信号とDSP216のポートに送信されるシングルエンド信号との間の変換を行うことができるエンコーダアームバスIF214によって各エンコーダDSP216へのインターフェースをとられる。エンコーダデータバス1904上で送信されるデータは、AACMMに配置された測定デバイス(例えば、プローブ118)の座標を決定するために使用される。エンコーダデータバス1904は、エンコーダDSP216からのアーム位置信号を要求するため、およびDSP216からの位置信号を受信するために基部プロセッサ基板204によって使用される。エンコーダデータバス1904は、2方向トラフィックに対応するために半二重モードで動作することができる。図19に示されたエンコーダデータバス1904は、(例えば、約3メガビット/秒でデータを転送する)差動配線の単一の組によって実装され得る。その他の実施形態において、エンコーダデータバス1904は、複数のパラレルバスとして実装される。当業者に理解され得るように、エンコーダデータバス1904の実装は、上述の実施形態に限定されない。エンコーダデータバス1904は、これらに限定されないが、シングルエンド配線の使用、または異なる速度でのデータ転送など、当技術分野で知られている任意の方法で実装され得る。
【0067】
エンコーダデータバス1904は、エンコーダアームバスインターフェース214を介したエンコーダDSP216からの位置信号(例えば、エンコーダ読み取りヘッドインターフェース234からのカウント)と、温度センサ212からの温度データと、プローブ端DSP228を介した任意の装着された測定デバイス(例えば、プローブ、取り外し可能なように結合されたアクセサリデバイス)に関するボタン選択状態とを送信する。
【0068】
デバイスデータバス1902上で送信されるデータは、アームに装着される(例えば、取り外し可能なように装着される)アクセサリデバイス(例えば、LLP500、機能的デバイス600、ペイントスプレーデバイス700)からのデータを含む。アクセサリデバイスからのデータは、アクセサリデバイスに関連するコントローラ(例えば、408、512、または600、700内のコントローラ)によって処理され、次いで、アームバス218内のバスB1905またはバスC1906上に直接乗せられることができる。代替的に、アクセサリからのデータは、プローブ端DSP228に送信されることができ、プローブ端DSP228で、そのデータは、アームバス218内のバスBまたはバスCに渡される前にさらに処理されることができる。デバイスデータバス1902は、測定デバイスに取り外し可能なように結合されるアクセサリデバイスからのアクセサリデバイスデータを要求するため、およびアクセサリデバイスのコントローラまたはDSPを受信するために基部プロセッサ基板204によって使用される。そのようなコントローラは、プローブ端DSP228であるか、またはアクセサリデバイス内のコントローラ(例えば、408、512、もしくは600、700内のコントローラ)である可能性がある。アクセサリデバイスデータは、これらに限定されないが、アクセサリデバイスがカメラであるときの画像データ、アクセサリデバイスがビデオレコーダであるときのビデオデータ、およびアクセサリデバイスがLLPであるときの2次元重心データ(COG)などの、アクセサリデバイスによって生成された任意のデータを含む。一実施形態において、デバイスデータバス1902は、これらに限定されないが、アクセサリデバイスが生成するデバイスデータの種類、およびアクセサリデバイスがデバイスデータを送信するレートなどのアクセサリデバイスの特性を特定するデータも受信する。デバイスデータバス1902は、2方向トラフィックに対応するために半二重モードで動作することができる。図19に示されたデバイスデータバス1902は、(例えば、約6メガビット/秒で組み合わされたデータを転送する)差動配線の2つの組によって実装され得る。当業者に理解され得るように、デバイスデータバス1902の実装は、上述の実施形態に限定されず、これらに限定されないが、シングルエンド配線の使用、または異なる速度でのデータ転送など、当技術分野で知られている任意の方法でやはり実装され得る。
【0069】
バスB1905およびバスC1906は、各エンコーダアームバスIF214に入り、各エンコーダアームバスIF214から出ていく。バスBまたはバスC上を伝わる信号を異なる形式に(例えば、差動ペアからシングルエンドに、またはその逆に)変換する必要はないので、一実施形態におけるエンコーダアームバスIF214は、バスBおよびバスC上を伝わるデータに関する単純なパススルー(pass−through)として機能する。
【0070】
トリガバス1907は、AACMM100内のセンサからのトリガ信号を基部プロセッサ基板204に搬送する。トリガバス1907上で搬送されるトリガ信号は、基部プロセッサ基板204へのアクションの要求として機能する。トリガ信号の典型例は、プローブが物体に接触させられるかまたは物体に近づけられるときに電子的に応答する種類のプローブである接触トリガプローブ(touch trigger probe)によって生成されるトリガ信号である。一実施形態において、接触トリガプローブは、基部プロセッサ基板204にトリガ信号を送信し、基部プロセッサ基板204は、当該トリガ信号を、取り込みバス1908を介して取り込み信号を直ちに送信するようにとの要求として扱う。基部プロセッサは、取り込み信号を送出し、AACMM100のすべてのエンコーダの読み取り値がラッチされるようにする。その結果、エンコーダの読み取り値が、接触トリガプローブのチップが物体に接触する瞬間に高い精度で同期される。トリガバスは、接触トリガプローブを用いたこの用途に限定されず、さまざまな異なるセンサからのトリガ信号を基部プロセッサ基板204に搬送することができる。さらに、トリガバスからのトリガ信号は、基部プロセッサ基板204の代わりに、または基部プロセッサ基板204に加えて外部コンピュータによって使用され得る。また、基部プロセッサ基板204または外部コンピュータは、トリガバス1907によって搬送されたトリガ信号にさまざまな方法で応答し得る。
【0071】
図19においてバス1904〜1908の隣の矢印によって示されるように、バスA、バスB、およびバスCは、双方向であり、したがって、信号が、これら3つのバスを介して基部プロセッサ基板204から送信され、基部プロセッサ基板204によって受信される。トリガバス1907は、一方向であり、したがって、トリガバス1907によって搬送されるトリガ信号は、基部プロセッサ基板204によって受信されるが、基部プロセッサ基板204から送信されない。取り込みバス1908も、一方向であり、したがって、取り込みバス1908によって搬送される取り込み信号は、基部プロセッサ基板204から送信されるが、基部プロセッサ基板204によって受信されない。
【0072】
図20は、一実施形態による、AACMMにおけるデータ取り込みのプロセスフローである。図20に示されたプロセスフローは、基部プロセッサ基板204によって開始される。ステップ2002において、基部プロセッサ基板204が、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラ(コントローラ408、512、または600、700内のコントローラなど)に取り込みバス1908上で取り込み信号を送信する。取り込み信号は、定期的なポーリングプロセスの結果としてか、またはトリガバス1907上のトリガ信号から受信された要求の結果としてかのいずれかで基部プロセッサ基板204によって開始される。ステップ2004において、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラが、取り込み信号の受信に応答してデータを取り込む(またはラッチする)。エンコーダDSP216は、エンコーダのカウントおよび温度などのデータをラッチする。プローブ端DSP228は、測定デバイスおよび/またはアクセサリデバイスの任意のボタンの状態を示すボタン押下状態をラッチする。交換可能なデバイスのコントローラからのデータは、デバイスデータバス1902に直接乗せられ得るか、またはそれらのデータは、デバイスデータバス1902に乗せられる前に処理するためにプローブ端DSP228に最初に送信され得る。
【0073】
ステップ2006において、基部プロセッサ基板204が、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラ(コントローラ408、512、または600、700内のコントローラなど)からの取り込まれたデータを収集する。一実施形態において、これは、基部プロセッサ204が、アドレスと、取り込まれたデータ(例えば、位置信号)を要求するコマンドとを(例えば、パケットで)送信することによって実行される。第1のエンコーダDSP216が、パケット内のアドレスをそのエンコーダDSP216自体のアドレスであると認識し、基部プロセッサ基板204に取り込まれたデータを返す。基部プロセッサ基板204は、エンコーダDSP216の残り、プローブ端DSP228、および交換可能なデバイスのコントローラからの取り込まれたデータをエンコーダデータバス1904上で引き続き要求し、受信する。基部プロセッサ基板204は、取り込まれたデータのすべてを受信し終わるまで一度に1つずつDSPおよびコントローラからデータを受信する。ステップ2008において、基部プロセッサ基板204が、所与の取り込み信号に対する位置信号およびボタン押下状態のすべてが相互に関連付けられるように、収集されたデータをまとめる。次に、処理はステップ2002で継続し、別の取り込み信号が、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラに送信される。処理は、ステップ2010でやはり継続し、ステップ2010において、基部プロセッサ204が、処理されていない取り込まれたデータから3次元位置データ(x,y,z)およびボタン状態を生成する。計算ステップ2010によって実行されるアクションは、データ収集ステップ2002〜2008のアクションと並列に実行される可能性がある。代替的に、2010のアクションは、ステップ2002〜2008によって十分なデータが収集された後に実行される可能性がある。後者の場合、ステップ2010の完了が、ステップ2002〜2008におけるさらなるデータの収集を引き起こす可能性がある。2つのあり得る経路(並列的なまたは逐次的なデータ収集/計算)は、ステップ2008および2010からのフィードバックループの破線によって示されている。
【0074】
一実施形態において、ステップ2002から2008は、AACMM100が稼働している間、継続的に実行される。さらに、接触プローブがAACMMに接続される場合、接触プローブは、(例えば、プローブチップが物体に接触するか、または接触しそうなときに)取り込み信号の発行を要求することができる。
【0075】
図21は、一実施形態による、エンコーダデータバス1904上のエンコーダデータおよびデバイスデータバス1902からのアクセサリデータの同時取り込みのプロセスフローである。図21に示されたプロセスフローは、アクセサリデバイス(例えば、LLP、カメラ)がAACMM100に装着されているときに実行される。ステップ2102において、アクセサリデバイスが、AACMM100のハンドルにおいて検出される。ステップ2104および2106は、測定されている物体に関する位置信号およびデバイスデータを収集するために並列に(例えば、同時に)実行される。ステップ2106において、位置信号が、エンコーダデータバス1904を介して位置信号を送信することによって収集され、アクセサリデータが、デバイスデータバス1902上でアクセサリデータを送信することによって収集される。ステップ2108において、収集されたデータが、物体上の点の3次元座標である可能性がある所望の結果を生成するために処理される。一実施形態において、アクセサリデバイスは、LLPであり、デバイスデータバス1902上のデータは、重心(COG)データを含む。このデータは、物体上の一群の点に関する3次元(3D)座標を得るために、エンコーダDSP216からの位置信号と組み合わされる。別の実施形態において、アクセサリデバイスは、カメラであり、カメラからのデータは、画像データを含む。この画像データは、画像に1つ以上の3Dデータの点を重ね合わせるために位置信号と組み合わされる。一実施形態において、収集されたデータは、外部コンピュータにエクスポートされ、ステップ2108は、外部コンピュータで実行される。任意的なステップ2110において、物体の図が、AACMM100のカラーLCD338に表示される。ステップ2108の収集されたデータの処理は、データ収集ステップ2104および2106と並列に実行され得るか、またはステップ2108は、ステップ2104および2106の後に実行され得る。後者の場合、ステップ2108の計算の完了が、ステップ2104および2106におけるデータ収集の新たなサイクルを開始する可能性がある。
【0076】
図20および21は、物体の寸法の特性についての情報を提供するために基部プロセッサ基板204によってデータがどのように収集されるかを示す。別の動作モードにおいて、基部プロセッサ基板204は、もっぱらデータを送信する可能性がある。もっぱらデータを送信する2つのデバイスの例は、画像プロジェクタおよびペイントスプレーヤである。
【0077】
技術的効果および利点は、1つのバス上のアームの位置信号および第2のバス上のアクセサリデバイスデータを同時に送信する能力を含む。これは、各取り込み信号に応答してより多くのデータが収集されることを可能にすることによって、システムの性能およびスループットの向上をもたらすことができる。加えて、AACMM100は、すべてのアクセサリデバイスが、位置データを収集するために利用される内部バスに準拠していることを必要としないので、より広範なアクセサリデバイスをサポートすることができる可能性がある。
【0078】
当業者に理解されるであろうように、本発明の態様は、システム、方法、またはコンピュータプログラム製品として具現化され得る。したがって、本発明の態様は、すべてハードウェアの実施形態、すべてソフトウェアの実施形態(ファームウェア、常駐ソフトウェア、マイクロコードなどを含む)、またはすべてが概して本明細書において「回路」、「モジュール」、もしくは「システム」と呼ばれることがあるソフトウェアの態様とハードウェアの態様とを組み合わせる実施形態の形態をとる可能性がある。さらに、本発明の態様は、コンピュータ可読プログラムコードを具現化する1つ以上のコンピュータ可読媒体で具現化されるコンピュータプログラム製品の形態をとる可能性がある。
【0079】
1つ以上のコンピュータ可読媒体の任意の組み合わせが、利用され得る。コンピュータ可読媒体は、コンピュータ可読信号媒体またはコンピュータ可読ストレージ媒体である可能性がある。コンピュータ可読ストレージ媒体は、これらに限定されないが、例えば、電子的、磁気的、光学的、電磁的、赤外線、もしくは半導体システム、装置、もしくはデバイス、またはこれらの任意の好適な組み合わせである可能性がある。コンピュータ可読媒体のより具体的な例(非網羅的なリスト)は、以下、すなわち、1つ以上の配線を有する電気的な接続、持ち運び可能なコンピュータディスケット、ハードディスク、ランダムアクセスメモリ(RAM)、読み出し専用メモリ(ROM)、消去可能プログラマブル読み出し専用メモリ(erasable programmable read−only memory)(EPROMもしくはフラッシュメモリ)、光ファイバ、持ち運び可能なコンパクトディスク読み出し専用メモリ(CD−ROM)、光学式ストレージデバイス、磁気式ストレージデバイス、またはこれらの任意の好適な組み合わせを含む。本明細書の文脈においては、コンピュータ可読ストレージ媒体は、命令実行システム、装置、もしくはデバイスによる使用のための、または命令実行システム、装置、もしくはデバイスに関連するプログラムを含むかまたは記憶することができる任意の有形の媒体である可能性がある。
【0080】
コンピュータ可読信号媒体は、例えば、ベースバンドで、または搬送波の一部としてコンピュータ可読プログラムコードを具現化する伝播されるデータ信号を含み得る。そのような伝播される信号は、電磁的、光学的、またはこれらの任意の好適な組み合わせを含むがそれらに限定されないさまざまな形態のうちの任意の形態をとり得る。コンピュータ可読信号媒体は、コンピュータ可読ストレージ媒体ではなく、命令実行システム、装置、もしくはデバイスによる使用のための、または命令実行システム、装置、もしくはデバイスに関連するプログラムを伝達、伝播、または搬送することができる任意のコンピュータ可読媒体である可能性がある。
【0081】
コンピュータ可読媒体上に具現化されたプログラムコードは、無線、有線、光ファイバケーブル、RFなど、またはこれらの任意の好適な組み合わせを含むがこれらに限定されない任意の適切な媒体を用いて送信され得る。
【0082】
本発明の態様のオペレーションを実行するためのコンピュータプログラムコードは、Java(登録商標)、Smalltalk、C++、C#などのオブジェクト指向プログラミング言語と、「C」プログラミング言語または同様のプログラミング言語などの通常の手続き型プログラミング言語とを含む1つ以上のプログラミング言語の任意の組み合わせで記述され得る。プログラムコードは、すべてユーザのコンピュータ上で、スタンドアロンのソフトウェアパッケージとしてユーザのコンピュータ上で部分的に、ユーザのコンピュータ上で部分的にかつ遠隔のコンピュータ上で部分的に、またはすべて遠隔のコンピュータもしくはサーバ上で実行され得る。後者の場合、遠隔のコンピュータが、ローカルエリアネットワーク(LAN)もしくは広域ネットワーク(WAN)を含む任意の種類のネットワークを介してユーザのコンピュータに接続され得るか、または外部コンピュータへの接続が(例えば、インターネットサービスプロバイダを使用してインターネットを介して)行われ得る。
【0083】
本発明の態様が、本発明の実施形態による方法、装置(システム)、およびコンピュータプログラム製品の流れ図および/または構成図を参照して説明されている。流れ図および/または構成図の各ブロックと、流れ図および/または構成図のブロックの組み合わせとは、コンピュータプログラム命令によって実装され得ることが理解されるであろう。
【0084】
これらのコンピュータプログラム命令は、コンピュータまたはその他のプログラム可能なデータ処理装置のプロセッサによって実行される命令が、流れ図および/または構成図の1つのブロックまたは複数のブロックで規定された機能/動作を実施するための手段をもたらすように、多目的コンピュータ、専用コンピュータ、または機械を製造するためのその他のプログラム可能なデータ処理装置のプロセッサに与えられ得る。これらのコンピュータプログラム命令は、コンピュータ可読媒体に記憶された命令が、流れ図および/または構成図の1つのブロックまたは複数のブロックで規定された機能/動作を実施する命令を含む製品をもたらすように、コンピュータ、その他のプログラム可能なデータ処理装置、またはその他のデバイスを特定の方法で機能させることができるコンピュータ可読媒体に記憶される可能性もある。
【0085】
コンピュータプログラム命令は、コンピュータまたはその他のプログラム可能な装置で実行される命令が、流れ図および/または構成図の1つのブロックまたは複数のブロックで規定された機能/動作を実施するためのプロセスを提供するように、コンピュータで実施されるプロセスを生成するために一連のオペレーションのステップがコンピュータ、その他のプログラム可能な装置、またはその他のデバイスで実行されるようにするために、コンピュータ、その他のプログラム可能なデータ処理装置、またはその他のデバイスにロードされる可能性もある。
【0086】
図面の流れ図および構成図は、本発明のさまざまな実施形態によるシステム、方法、およびコンピュータプログラム製品のあり得る実装のアーキテクチャ、機能、およびオペレーションを示す。その際、流れ図または構成図の各ブロックは、(1つ以上の)規定された論理的な機能を実装するための1つ以上の実行可能命令を含むモジュール、セグメント、またはコードの一部を表す可能性がある。一部の代替的な実装において、ブロックで示された機能が、図面に示された順序とは異なる順序で行われ得ることにも留意されたい。例えば、連続で示された2つのブロックが、実際には実質的に同時に実行される可能性があり、またはそれらのブロックは、関連する機能に応じて逆順に実行される場合もあり得る。構成図および/または流れ図の各ブロックと、構成図および/または流れ図のブロックの組み合わせとは、規定された機能もしくは動作を実行する専用のハードウェアに基づくシステム、または専用のハードウェアとコンピュータ命令の組み合わせによって実装され得ることも認識されるであろう。
【0087】
本発明が例示的な実施形態を参照して説明されたが、本発明の範囲を逸脱することなくさまざまな変更が行われる可能性があり、均等物が本発明の要素の代替とされる可能性があることが当業者に理解されるであろう。さらに、特定の状況または構成要素を本発明の教示に適合させるために、本発明の本質的な範囲を逸脱することなく多くの修正が行われ得る。したがって、本発明は本発明を実施するための考えられる最良の形態として開示された特定の実施形態に限定されず、本発明は添付の特許請求の範囲内に入るすべての実施形態を含むことが意図される。さらに、用語「第1」、「第2」などの使用はいかなる順序または重要度も表さず、むしろ用語「第1」、「第2」などはある要素を別の要素と区別するために使用される。その上、用語「a」、「an」などの使用は量の限定を表さず、むしろ言及される項目の少なくとも1つの存在を表す。
【技術分野】
【0001】
関連出願の相互参照
本開示は、座標測定機に関し、より詳細には、複数の独立したバスを有する可搬型の関節アーム座標測定機に関する。
【背景技術】
【0002】
本出願は、2010年1月20日に出願した仮出願第61/296,555号、2010年6月16日に出願した仮出願第61/355,279号、および2010年6月4日に出願した仮出願61/351,347号の利益を主張するものであり、これらの仮出願の内容は、それらの全体を本願に引用して援用する。
【0003】
可搬型の関節アーム座標測定機(AACMM)は、部品の製造または生産のさまざまな段階(例えば、機械加工)の間に部品の寸法を迅速かつ正確に確認するニーズが存在する部品の製造または生産に広く使用されている。可搬型のAACMMは、特に、比較的複雑な部品の寸法の測定を実行するのにかかる時間量の中で、知られている据え付け式のまたは固定式の、コストが高く、使用するのが比較的難しい測定設備と比べて大きな改善を示す。通常、可搬型のAACMMのユーザは、単純に、測定されるべき部品または物体の表面に沿ってプローブを導く。次に、測定データが記録され、ユーザに提供される。場合によっては、データは、視覚的な形態、例えば、コンピュータスクリーン上の3次元(3D)の形態でユーザに提供される。その他の場合、データは、数字の形態でユーザに提供され、例えば、穴の直径を測定するとき、テキスト「直径=1.0034」がコンピュータスクリーン上に表示される。
【0004】
先行技術の可搬型の関節アームCMMの一例が、同一出願人による米国特許第5,402,582(‘582)号に開示されており、この米国特許は、その全体を本願に引用して援用する。‘582号特許は、一端に支持基部を、他端に測定プローブを有する手動操作式の関節アームCMMを備える3D測定システムを開示する。同一出願人による米国特許第5,611,147(‘147)号は、類似の関節アームCMMを開示しており、この米国特許は、その全体を本願に引用して援用する。‘147号特許においては、関節アームCMMは、プローブ端の追加的な回転軸を含むいくつかの特徴を含み、それによって、2−2−2軸構成または2−2−3軸構成(後者は7軸アームである)のどちらかを有するアームを提供する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5,402,582号明細書
【特許文献2】米国特許第5,611,147号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
現在のAACMMにおいては、エンコーダデータを含む測定データが収集され、関節アームCMM内に配置されたアームバスに沿って送信される。単一のバスを使用することの欠点は、バス速度およびバス幅などのバスの特性が、エンコーダおよびエンコーダデータの要求によって規定されることである。単一のバスを使用することの別の欠点は、アームバスで送信可能な非エンコーダデータの量が、エンコーダデータによって使用される容量を考慮した後のアームバスの残りの容量によって制限されることである。既存のAACMMはそれらのAACMMの意図される目的に適してはいるが、必要とされるのは、改善されたアームバスを提供するための本発明の実施形態の特定の特徴を有する可搬型のAACMMである。
【課題を解決するための手段】
【0007】
一実施形態は、可搬型の関節アーム座標測定機(AACMM)である。AACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部を含む。AACMMは、第1の端部および電子回路に結合された測定デバイスも含む。電子回路は、少なくとも1つの位置トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、測定デバイスと第1の端部の間に配置されたプローブ端、プローブ端に取り外し可能なように結合されたアクセサリデバイス、エンコーダデータバス、および第1のデバイスデータバスをさらに含む。エンコーダデータバスは、少なくとも1つのトランスデューサおよび電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。
【0008】
別の実施形態は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部を含む可搬型のAACMMである。AACMMは、第1の端部および電子回路に結合された測定デバイスも含む。電子回路は、少なくとも1つの位置トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、測定デバイスと第1の端部の間に配置されたプローブ端、エンコーダデータバス、および第1のデバイスデータバスをさらに含む。エンコーダデータバスは、少なくとも1つのトランスデューサおよび電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、測定デバイスおよび電子回路に結合される。第1のデバイスデータバスは、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。
【0009】
さらなる実施形態は、可搬型のAACMMを動作させる方法である。方法は、エンコーダデータバスを介して位置信号を受信するステップを含む。受信するステップは、可搬型のAACMMの電子回路による。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部を含む。可搬型のAACMMは、第1の端部に結合された測定デバイス、測定デバイスと第1の端部の間に配置されたプローブ端、プローブ端に取り外し可能なように結合されたアクセサリデバイス、電子回路、少なくとも1つの位置トランスデューサおよび電子回路と通信しているエンコーダデータバス、ならびにアクセサリデバイスおよび電子回路と通信しているデバイスデータバスをさらに含む。アクセサリデバイスデータが、電子回路で受信される。アクセサリデバイスデータは、デバイスデータバスを介してアクセサリデバイスから受信される。デバイスデータバスは、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作する。
【0010】
ここで図面を参照して、本開示の範囲全体に関して限定的であると解釈されるべきでなく、要素がいくつかの図で同様に付番されている例示的な実施形態が示される。
【図面の簡単な説明】
【0011】
【図1A】図1Aおよび1Bを含む、本発明のさまざまな態様の実施形態を中に有する可搬型の関節アーム座標測定機(AACMM)の斜視図である。
【図1B】図1Aおよび1Bを含む、本発明のさまざまな態様の実施形態を中に有する可搬型の関節アーム座標測定機(AACMM)の斜視図である。
【図2A】一緒に作られた図2A〜2Dを含む、一実施形態による、図1のAACMMの一部として利用される電子機器の構成図である。
【図2B】一緒に作られた図2A〜2Dを含む、一実施形態による、図1のAACMMの一部として利用される電子機器の構成図である。
【図2C】一緒に作られた図2A〜2Dを含む、一実施形態による、図1のAACMMの一部として利用される電子機器の構成図である。
【図2D】一緒に作られた図2A〜2Dを含む、一実施形態による、図1のAACMMの一部として利用される電子機器の構成図である。
【図3A】一緒に作られた図3Aおよび3Bを含む、一実施形態による、図2の電子データ処理システムの詳細な特徴を示す構成図である。
【図3B】一緒に作られた図3Aおよび3Bを含む、一実施形態による、図2の電子データ処理システムの詳細な特徴を示す構成図である。
【図4】図1のAACMMのプローブ端の等角図である。
【図5】ハンドルが結合されている図4のプローブ端の側面図である。
【図6】ハンドルが装着された図4のプローブ端の部分的な側面図である。
【図7】図6のプローブ端のインターフェース部分の拡大された部分的な側面図である。
【図8】図5のプローブ端のインターフェース部分の別の拡大された部分的な側面図である。
【図9】図4のハンドルの部分的に断面図である等角図である。
【図10】レーザラインプローブデバイスが装着された図1のAACMMのプローブ端の等角図である。
【図11】図10のレーザラインプローブの部分的に断面図である等角図である。
【図12】別の取り外し可能なデバイスが装着された図1のAACMMのプローブ端の等角図である。
【図13】ペイントスプレーデバイスが装着された図1のAACMMのプローブ端の等角図である。
【図14A】図14A〜図14Cを含む、本発明の一実施形態による、アームの位置および向きに応じて、部品の特徴と位置合わせされたままであるように調整され得る投影画像の図である。
【図14B】図14A〜図14Cを含む、本発明の一実施形態による、アームの位置および向きに応じて、部品の特徴と位置合わせされたままであるように調整され得る投影画像の図である。
【図14C】図14A〜図14Cを含む、本発明の一実施形態による、アームの位置および向きに応じて、部品の特徴と位置合わせされたままであるように調整され得る投影画像の図である。
【図15A】図15A〜15Bを含む、投影画像がプローブの手引きおよび状態情報を含む、画像が投影された部品の表面の図である。
【図15B】図15A〜15Bを含む、投影画像がプローブの手引きおよび状態情報を含む、画像が投影された部品の表面の図である。
【図16】2つのプロジェクタがプローブ端に取り付けられ、第3のプロジェクタがAACMMの別の部分に取り付けられたAACMMの斜視図である。
【図17】2つのプロジェクタがプローブ端に取り付けられた別のAACMMの斜視図である。
【図18】プロジェクタが部品の表面に画像を投影し、投影画像が部品の表面の裏の隠された特徴を含む、プロジェクタがプローブ端に取り付けられたAACMMの斜視図である。
【図19】一実施形態による、AACMMのアームバスの構成図である。
【図20】一実施形態による、AACMMにおけるデータ取り込みのプロセスフローの図である。
【図21】一実施形態による、エンコーダデータバスおよびデバイスデータバス上の同時データ取り込みのプロセスフローの図である。
【発明を実施するための形態】
【0012】
本発明の一実施形態は、AACMM内でデータを送信するための、互いに独立して動作する複数のアームバスを含む改善されたAACMMを提供する。
【0013】
図1Aおよび1Bは、本発明のさまざまな実施形態によるAACMM100を全体的に示し、関節アームは、座標測定機の一種である。図1Aおよび1Bに示されるように、例示的なAACMM100は、一端でAACMM100のアーム部104に結合された測定プローブ筐体102を含むプローブ端401を有する6または7軸関節測定デバイスを含み得る。アーム部104は、軸受カートリッジ(例えば、2つの軸受カートリッジ)の第1の群110によって第2のアームセグメント108に結合された第1のアームセグメント106を含む。軸受カートリッジ(例えば、2つの軸受カートリッジ)の第2の群112は、第2のアームセグメント108を測定プローブ筐体102に結合する。軸受カートリッジ(例えば、3つの軸受カートリッジ)の第3の群114は、第1のアームセグメント106を、AACMM100のアーム部104の他端に配置された基部116に結合する。軸受カートリッジの各群110、112、114は、関節による動作の複数の軸を提供する。また、プローブ端401は、AACMM100の第7の軸部のシャフト(例えば、AACMM100の第7の軸内の測定デバイス、例えば、プローブ118の動作を決定するエンコーダシステムを含むカートリッジ)を含む測定プローブ筐体102を含み得る。この実施形態において、プローブ端401は、測定プローブ筐体102の中心を通って延びる軸周りで回転し得る。AACMM100を使用する際、基部116は、通常、作業台に固定される。
【0014】
各軸受カートリッジの群110、112、114の中の各軸受カートリッジは、通常、エンコーダシステム(例えば、光学式の角度エンコーダシステム)を含む。エンコーダシステム(すなわち、トランスデューサ)は、基部116に対するプローブ118の位置(および、ひいては、特定の基準系、例えば、局所または大域基準系におけるAACMM100によって測定されている物体の位置)をすべてが一緒になって示すそれぞれのアームセグメント106、108および対応する軸受カートリッジの群110、112、114の位置を示す。アームセグメント106、108は、例えば、これに限定されないが、炭素複合材料などの好適な剛性のある材料で作製され得る。関節による動作の6つまたは7つの軸(すなわち、自由度)を有する可搬型のAACMM100は、オペレータによって簡単に扱われ得るアーム部104を提供しながら、オペレータが基部116周りの360度の領域内の所望の位置にプローブ118を位置付けることを可能にする利点をもたらす。しかし、2つのアームセグメント106、108を有するアーム部104の例は例示を目的とするものであり、特許請求される発明はそのように限定されるべきでないことを理解されたい。AACMM100は、軸受カートリッジによって一緒に結合された任意の数のアームセグメント(および、ひいては、6つもしくは7つを超えるか、または6つもしくは7つ未満の関節による動作の軸または自由度)を持つ可能性がある。
【0015】
プローブ118は、測定プローブ筐体102に取り外し可能なように取り付けられ、測定プローブ筐体102は、軸受カートリッジの群112に接続される。ハンドル126は、例えば、クイック接続インターフェース(quick−connect interface)により測定プローブ筐体102に対して取り外し可能である。ハンドル126は、別のデバイス(例えば、レーザラインプローブ、バーコードリーダ)で置き換えられることができ、それによって、オペレータが同じAACMM100で異なる測定デバイスを使用することを可能にする利点をもたらす。例示的な実施形態において、プローブ筐体102は、接触式の測定デバイスであり、測定されるべき物体に物理的に接触する、ボール形の、タッチセンシティブな、湾曲した、および伸長式のプローブを含むがこれらに限定されない異なるチップ118を有する可能性がある取り外し可能なプローブ118を収容する。その他の実施形態において、測定は、例えば、レーザラインプローブ(LLP)などの非接触式のデバイスによって実行される。一実施形態において、ハンドル126は、クイック接続インターフェースを使用してLLPで置き換えられる。その他の種類の測定デバイスが、追加的な機能を提供するために取り外し可能なハンドル126を置き換える可能性がある。そのような測定デバイスの例は、例えば、1つ以上の照明、温度センサ、熱スキャナ、バーコードスキャナ、プロジェクタ、ペイントスプレーヤ、カメラなどを含むがこれらに限定されない。
【0016】
図1Aおよび1Bに示されるように、AACMM100は、軸受カートリッジの群112から測定プローブ筐体102を取り外すことなしにアクセサリまたは機能が変更されることを可能にする利点をもたらす取り外し可能なハンドル126を含む。図2に関して以下でより詳細に検討されるように、取り外し可能なハンドル126は、電力およびデータが、ハンドル126、およびプローブ端401に配置された対応する電子機器とやりとりされることを可能にする電気コネクタも含み得る。
【0017】
さまざまな実施形態において、軸受カートリッジの各群110、112、114は、AACMM100のアーム部104が複数の回転軸周りを動くことを可能にする。述べられたように、各軸受カートリッジの群110、112、114は、例えばアームセグメント106、108の対応する回転軸と同軸上にそれぞれが配置された、例えば光学式の角度エンコーダなどの対応するエンコーダシステムを含む。光学式のエンコーダシステムは、本明細書において以下でより詳細に説明されるように、例えば、対応する軸周りのアームセグメント106、108のそれぞれのアームセグメントの回転する(スイベルの)または横の(蝶番の)動きを検出し、AACMM100内の電子データ処理システムに信号を送信する。それぞれの個々の処理されていないエンコーダのカウントが信号として電子データ処理システムに別々に送信され、電子データ処理システムにおいて、そのカウントは測定データへとさらに処理される。同一出願人による米国特許第5,402,582(‘582)号に開示されているような、AACMM100自体から分離した位置計算機(例えば、シリアルボックス)は必要とされない。
【0018】
基部116は、装着デバイスまたは取り付けデバイス120を含み得る。取り付けデバイス120は、AACMM100が、例えば、検査台、マシニングセンタ、壁、または床などの所望の位置に取り外し可能なように取り付けられることを可能にする。一実施形態において、基部116は、AACMM100が移動されているときにオペレータが基部116を持つのに都合の良い位置を提供するハンドル部122を含む。一実施形態において、基部116は、折りたたむとディスプレイスクリーンなどのユーザインターフェースが見えるようになる可動式のカバー部124をさらに含む。
【0019】
一実施形態によれば、可搬型のAACMM100の基部116は、2つの主要なコンポーネント、すなわち、AACMM100内のさまざまなエンコーダシステムからのデータ、および3次元(3D)位置計算をサポートするためのその他のアームパラメータを表すデータを処理する基部処理システムと、比較的完全な計測機能が外部コンピュータへの接続を必要とせずにAACMM100内で実施されることを可能にする、搭載オペレーティングシステム、タッチスクリーンディスプレイ、および常駐アプリケーションソフトウェアを含むユーザインターフェース処理システムとを含む電子データ処理システムを含むまたは収容する。
【0020】
基部116内の電子データ処理システムは、基部116から離れて配置されたエンコーダシステム、センサ、およびその他の周辺ハードウェア(例えば、AACMM100上の取り外し可能なハンドル126に取り付けられることができるLLP)と通信することができる。これらの周辺ハードウェアデバイスまたは特徴をサポートする電子機器は、可搬型のAACMM100内に配置された軸受カートリッジの群110、112、114のそれぞれに配置され得る。
【0021】
図2は、一実施形態による、AACMM100で利用される電子機器の構成図である。図2に示される実施形態は、基部処理システムを実装するための基部プロセッサ基板204と、ユーザインターフェース基板202と、電力を供給するための基部電源基板206と、Bluetoothモジュール232と、基部傾斜基板208とを含む電子データ処理システム210を含む。ユーザインターフェース基板202は、ユーザインターフェース、表示、および本明細書において説明されるその他の機能を実行するアプリケーションソフトウェアを実行するためのコンピュータプロセッサを含む。
【0022】
図2に示されるように、電子データ処理システム210は、1つ以上のアームバス218を介して上述の複数のエンコーダシステムと通信している。図2に示された実施形態において、各エンコーダシステムは、エンコーダデータを生成し、エンコーダアームバスインターフェース214と、エンコーダデジタル信号プロセッサ(DSP)216と、エンコーダ読み取りヘッドインターフェース234と、温度センサ212とを含む。歪みセンサなどのその他のデバイスが、アームバス218に装着され得る。
【0023】
さらに図2に示されているのは、アームバス218と通信しているプローブ端電子機器230である。プローブ端電子機器230は、プローブ端DSP228と、温度センサ212と、一実施形態においてはクイック接続インターフェースによってハンドル126またはLLP242に接続するハンドル/LLPインターフェースバス240と、プローブインターフェース226とを含む。クイック接続インターフェースは、LLP242およびその他のアクセサリによって使用されるデータバス、制御線、および電源バスへのハンドル126によるアクセスを可能にする。一実施形態において、プローブ端電子機器230は、AACMM100の測定プローブ筐体102に配置される。一実施形態において、ハンドル126は、クイック接続インターフェースから取り外されることができ、測定は、ハンドル/LLPインターフェースバス240を介してAACMM100のプローブ端電子機器230と通信するレーザラインプローブ(LLP)242によって実行される可能性がある。一実施形態において、電子データ処理システム210は、AACMM100の基部116に配置され、プローブ端電子機器230は、AACMM100の測定プローブ筐体102に配置され、エンコーダシステムは、軸受カートリッジの群110、112、114に配置される。プローブインターフェース226は、1−wire(登録商標)通信プロトコル236を実施する、Maxim Integrated Products,Inc.から販売されている製品を含む任意の好適な通信プロトコルによってプローブ端DSP228に接続することができる。
【0024】
図3は、一実施形態による、AACMM100の電子データ処理システム210の詳細な特徴を示す構成図である。一実施形態において、電子データ処理システム210は、AACMM100の基部116に配置され、基部プロセッサ基板204と、ユーザインターフェース基板202と、基部電源基板206と、Bluetoothモジュール232と、基部傾斜モジュール208とを含む。
【0025】
図3に示される実施形態において、基部プロセッサ基板204は、図中に示されるさまざまな機能ブロックを含む。例えば、基部プロセッサ機能302は、AACMM100からの測定データの収集をサポートするために利用され、アームバス218およびバス制御モジュール機能308を介して処理されていないアームデータ(例えば、エンコーダシステムのデータ)を受信する。メモリ機能304は、プログラムおよび静的なアーム構成データを記憶する。基部プロセッサ基板204は、LLP242などの任意の外部ハードウェアデバイスまたはアクセサリと通信するための外部ハードウェアオプションポート機能310も含む。リアルタイムクロック(RTC)およびログ306と、バッテリパックインターフェース(IF)316と、診断ポート318とが、図3に示される基部プロセッサ基板204の実施形態の機能にやはり含まれる。
【0026】
また、基部プロセッサ基板204は、外部(ホストコンピュータ)および内部(ディスプレイプロセッサ202)デバイスとのすべての有線および無線データ通信を管理する。基部プロセッサ基板204は、(例えば、米国電気電子学会(IEEE)1588などのクロック同期規格を用いて)イーサネット機能320を介してイーサネットネットワークと、LAN機能322を介して無線ローカルエリアネットワーク(WLAN)と、およびパラレルシリアル通信(PSC)機能314を介してBluetoothモジュール232と通信する能力を有する。基部プロセッサ基板204は、ユニバーサルシリアルバス(USB)デバイス312への接続も含む。
【0027】
基部プロセッサ基板204は、上述の‘582号特許のシリアルボックスで開示されたようないかなる前処理も必要とせずに測定データへと処理するために、処理されていない測定データ(例えば、エンコーダシステムのカウント、温度の読み取り値)を送信および収集する。基部プロセッサ204は、RS485インターフェース(IF)326を介してユーザインターフェース基板202のディスプレイプロセッサ328に処理されたデータを送信する。一実施形態において、基部プロセッサ204は、処理されていない測定データを外部コンピュータにやはり送信する。
【0028】
ここで図3のユーザインターフェース基板202に目を向けると、基部プロセッサによって受信された角度および位置データが、AACMM100内の自律的な計測システムを提供するためにディスプレイプロセッサ328で実行されるアプリケーションによって利用される。アプリケーションは、これらに限定されないが、特徴の測定、手引きおよび訓練のグラフィックス、遠隔診断、温度の修正、さまざまな動作の特徴の制御、さまざまなネットワークへの接続、ならびに測定された物体の表示などの機能をサポートするためにディスプレイプロセッサ328で実行され得る。ディスプレイプロセッサ328および液晶ディスプレイ(LCD)338(例えば、タッチスクリーンLCD)ユーザインターフェースとともに、ユーザインターフェース基板202は、セキュアデジタル(SD)カードインターフェース330と、メモリ332と、USBホストインターフェース334と、診断ポート336と、カメラポート340と、音声/映像インターフェース342と、ダイヤルアップ/セルモデム344と、全地球測位システム(GPS)ポート346とを含むいくつかのインターフェースオプションを含む。
【0029】
図3に示される電子データ処理システム210は、環境データを記録するための環境レコーダ362を有する基部電源基板206も含む。また、基部電源基板206は、AC/DCコンバータ358およびバッテリ充電器制御360を用いて、電子データ処理システム210に電力を供給する。基部電源基板206は、集積回路間(inter−integrated circuit)(I2C)シリアルシングルエンドバス354を用いて、およびDMAシリアル周辺インターフェース(DMA serial peripheral interface)(DSPI)356を介して基部プロセッサ基板204と通信する。基部電源基板206は、基部電源基板206に実装された入力/出力(I/O)拡張機能364を介して傾斜センサおよび無線周波数識別(RFID)モジュール208に接続される。
【0030】
別個のコンポーネントとして示されているが、その他の実施形態において、これらのコンポーネントのすべてまたは一部は、図3に示された位置とは異なる位置に物理的に配置される、および/または図3に示された方法とは異なる方法で組み合わされた機能である可能性がある。例えば、一実施形態において、基部プロセッサ基板204およびユーザインターフェース基板202は、1つの物理的な基板に組み合わされる。
【0031】
ここで図4〜9を参照すると、取り外し可能で交換可能なデバイス400がAACMM100に結合することを可能にするクイック接続機械的および電気的インターフェース(quick−connect mechanical and electrical interface)を有する測定プローブ筐体102を持つプローブ端401の例示的な実施形態が、示されている。例示的な実施形態において、デバイス400は、例えばピストルの握りのようにオペレータの手で握られるように大きさおよび形状を決められるハンドル部404を含む格納カバー402を含む。格納カバー402は、空洞406を有する薄壁構造物である(図9)。空洞406は、コントローラ408を受けるように大きさを決められ、構成される。コントローラ408は、例えばマイクロプロセッサを有するデジタル回路であるか、またはアナログ回路である可能性がある。一実施形態において、コントローラ408は、電子データ処理システム210(図2および3)と非同期双方向通信をしている。コントローラ408と電子データ処理システム210の間の通信接続は、(例えば、コントローラ420を介した)有線である可能性があるか、または直接的もしくは間接的な無線接続(例えば、BluetoothもしくはIEEE802.11)、または有線接続と無線接続の組み合わせである可能性がある。例示的な実施形態において、格納カバー402は、例えば、射出成形プラスチック材料などから2つの半分410、412で形成される。半分410、412は、例えば、ねじ414などの締め具によって1つに固定され得る。その他の実施形態において、格納カバーの半分410、412は、例えば、接着剤または超音波溶接によって1つに固定され得る。
【0032】
ハンドル部404は、オペレータによって手動で作動され得るボタンまたは作動装置416、418も含む。作動装置416、418は、プローブ筐体102内のコントローラ420に信号を送信するコントローラ408に結合される。例示的な実施形態において、作動装置416、418は、プローブ筐体102のデバイス400とは反対側に配置された作動装置422、424の機能を実行する。デバイス400は、デバイス400、AACMM100を制御するためにやはり使用され得る追加的なスイッチ、ボタン、またはその他の作動装置を有する可能性があり、またはその逆の可能性もあることを理解されたい。また、デバイス400は、例えば、発光ダイオード(LED)、音源、メータ、ディスプレイ、または計器などのインジケータを含み得る。一実施形態において、デバイス400は、点の測定と同時に口頭のコメントを残すことを可能にするデジタルボイスレコーダを含み得る。さらに別の実施形態において、デバイス400は、オペレータが音声による作動コマンドを電子データ処理システム210に送信することを可能にするマイクロホンを含む。
【0033】
一実施形態において、ハンドル部404は、オペレータの両手で使用されるように、または特定の手(例えば、左利きまたは右利き)用に構成され得る。ハンドル部404は、障害を持ったオペレータ(例えば、指の欠けたオペレータまたは義手を着けたオペレータ)を助けるように構成されることもできる。さらに、ハンドル部404は、空間的ゆとりが限られるときには取り外されることができ、プローブ筐体102が単体で使用されることができる。上で検討されたように、プローブ端401は、AACMM100の第7の軸のシャフトも含み得る。この実施形態において、デバイス400は、AACMMの第7の軸周りで回転するように構成され得る。
【0034】
プローブ端401は、プローブ筐体102の第2のコネクタ428と協力するデバイス400の第1のコネクタ429(図8)を有する機械的および電気的インターフェース426を含む。コネクタ428、429は、デバイス400のプローブ筐体102への結合を可能にする電気的および機械的特徴を含み得る。一実施形態において、インターフェース426は、機械的結合部432および電気コネクタ434を上に有する第1の表面430を含む。格納カバー402は、第1の表面430に近接して配置され、第1の表面430から段差を付けられた第2の表面436も含む。例示的な実施形態において、第2の表面436は、第1の表面430から約0.5インチ差の段差を付けられた平面である。以下でより詳細に検討されるように、この段差は、カラー438などの締め具を締めるかまたは緩めるときにオペレータの指のためのゆとりをもたらす。インターフェース426は、コネクタのピンを位置合わせすることを必要とせずに、および別個のケーブルまたはコネクタを必要とせずに、デバイス400とプローブ筐体102の間の比較的迅速で安定した電子的接続を提供する。
【0035】
電気コネクタ434は、第1の表面430から延び、例えば、1つ以上のアームバス218などを介して電子データ処理システム210(図2および3)と非同期双方向通信するように電気的に結合される1つ以上のコネクタピン440を含む。双方向通信接続は、(例えば、アームバス218を介した)有線、無線(例えば、BluetoothもしくはIEEE802.11)、または有線接続と無線接続の組み合わせである可能性がある。一実施形態において、電気コネクタ434は、コントローラ420に電気的に結合される。コントローラ420は、例えば、1つ以上のアームバス218などを介して電子データ処理システム210と非同期双方向通信している可能性がある。電気コネクタ434は、プローブ筐体102の電気コネクタ442と比較的迅速で安定した電子的接続を行うように配置される。電気コネクタ434、442は、デバイス400がプローブ筐体102に装着されるときに互いに接続する。電気コネクタ434、442は、それぞれ、電磁干渉からの遮蔽、ならびにコネクタピンの保護、およびデバイス400をプローブ筐体102に装着するプロセス中のピンの位置合わせの補助を提供する金属で覆われたコネクタ筐体を含み得る。
【0036】
機械的結合部432は、AACMM100のアーム部104の端部のデバイス400の位置がずれないまたは動かないことが好ましい比較的厳密な用途をサポートするために、デバイス400とプローブ筐体102の間の比較的強固な機械的結合を提供する。概して、すべてのそのような動きは、測定結果の精度の望ましくない低下を招く可能性がある。これらの所望の結果は、本発明の実施形態のクイック接続機械的および電子的インターフェース(quick connect mechanical and electronic interface)の機械的装着構成部分のさまざまな構造的特徴を用いて達成される。
【0037】
一実施形態において、機械的結合部432は、一端448(デバイス400の前縁または「最前部」)に配置された第1の凸部444を含む。第1の凸部444は、第1の凸部444から延びるへり446を形成する鍵型にされた、切欠きを入れられた、または傾斜を付けられたインターフェースを含み得る。へり446は、プローブ筐体102から延びる凸部452によって画定される溝450(図8)に受けられるように大きさを決められる。第1の凸部444および溝450は、へり446が溝450内に位置付けられるときに、溝450が、プローブ筐体102に装着されるときのデバイス400の長手方向と横方向の両方の動きを制限するために使用され得るような結合部構成をカラー438とともに形成することを理解されたい。以下でより詳細に検討されるように、カラー438の回転が、へり446をスロット450内に固定するために使用され得る。
【0038】
第1の凸部444の反対側に、機械的結合部432は、第2の凸部454を含み得る。第2の凸部454は、鍵型にされた、切欠きを入れられたへりの、または傾斜を付けられたインターフェース表面456(図5)を有する可能性がある。第2の凸部454は、例えば、カラー438などの、プローブ筐体102に関連する締め具を係合するように配置される。以下でより詳細に検討されるように、機械的結合部432は、インターフェース426のための支点を提供する、電気コネクタ434に近接する、または電気コネクタ434周りに配置された、表面430から突出する持ち上げられた表面を含む(図7および8)。これは、デバイス400がプローブ筐体102に装着されるときに、デバイス400とプローブ筐体102の間の3つの機械的接点のうちの第3の接点として機能する。
【0039】
プローブ筐体102は、同軸上に配置されたカラー438を一端に含む。カラー438は、第1の位置(図5)と第2の位置(図7)の間を動くことができるねじ部を含む。カラー438を回転することによって、カラー438は、外部の道具を必要とせずにデバイス400を固定するか、または取り外すために使用され得る。カラー438の回転は、比較的間隔の広い角ねじ山が切られた円筒474に沿ってカラー438を動かす。そのような比較的大きなサイズの角ねじおよび外形表面の使用は、最小限の回転トルクによって非常に大きな締め付け力をもたらす。さらに、円筒474のねじの広いピッチは、カラー438が最小限の回転で締められるか、または緩められることを可能にする。
【0040】
デバイス400をプローブ筐体102に結合するために、へり446が溝450に挿入され、デバイスは、第2の凸部454を矢印464(図5)に示されるように表面458に向かって回転するように旋回させられる。カラー438が回転され、カラー438を矢印462によって示される方向に動かすかまたは平行移動させ、表面456と係合させる。角度の付いた表面456に対するカラー438の動きは、機械的結合部432を持ち上げられた表面460に向かって押しやる。これは、デバイス400をプローブ筐体102に強固に固定することを妨げる可能性があるインターフェースの変形またはインターフェースの表面の異物の起こり得る問題を克服するのに役立つ。カラー438によって第2の凸部454に力を加えることは、機械的結合部432を前に動かし、へり446を押してプローブ筐体102に固定する。カラー438が締められ続けるにつれて、第2の凸部454は、プローブ筐体102に向かって上向きに押され、支点に圧力をかける。これは、シーソー型の構成をもたらし、圧力を第2の凸部454、へり446、および中央の支点に加えて、デバイス400のずれまたは揺れを軽減するかまたは取り除く。支点は、プローブ筐体102の底を直接押し、一方、へり446は、プローブ筐体102の端部に下向きの力をかける。図5は、デバイス400およびカラー438の動きの方向を示す矢印462、464を含む。図7は、カラー438が締められるときにインターフェース426内でかけられる圧力の方向を示す矢印466、468、470を含む。デバイス400の表面436の段差が、カラー438と表面436の間の間隙472(図6)をもたらすことを理解されたい。間隙472は、カラー438が回転されるときに指を挟む危険性を軽減しながら、オペレータがカラー438をよりしっかりと握ることを可能にする。一実施形態において、プローブ筐体102は、カラー438が締められるときの変形を軽減するかまたは防止するのに十分なだけの剛性がある。
【0041】
インターフェース426の実施形態は、機械的結合部432および電気コネクタ434の適切な位置合わせを可能にし、さらに、もし保護しなかった場合にはカラー438、へり446、および表面456の締め付け動作によって生じる可能性がある加えられる力から電子機器のインターフェースを保護する。これは、はんだ付けされた端子を有する可能性がある回路基板476に取り付けられた電気コネクタ434、442に対する力による損傷を軽減するかまたは取り除く利点をもたらす。また、実施形態は、ユーザがデバイス400をプローブ筐体102に接続するか、またはプローブ筐体102から切り離すために道具が必要とされないという点で、知られている手法に優る利点をもたらす。これは、オペレータが手動で比較的簡単にデバイス400をプローブ筐体102に接続し、プローブ筐体102から切り離すことを可能にする。
【0042】
インターフェース426によって可能な比較的多数の遮蔽された電気接続のおかげで、比較的多数の機能が、AACMM100とデバイス400の間で共有され得る。例えば、AACMM100に配置されたスイッチ、ボタン、またはその他の作動装置が、デバイス400を制御するために使用される可能性があり、またはその逆の可能性もある。さらに、コマンドおよびデータが、電子データ処理システム210からデバイス400に送信され得る。一実施形態において、デバイス400は、基部プロセッサ204のメモリに記憶されるべき、またはディスプレイ328に表示されるべき記録された画像のデータを送信するビデオカメラである。別の実施形態において、デバイス400は、電子データ処理システム210からデータを受信する画像プロジェクタである。さらに、AACMM100またはデバイス400のどちらかに配置された温度センサが、他方によって共有される可能性がある。本発明の実施形態は、多種多様なアクセサリデバイス400がAACMM100に迅速、簡単、かつ確実に結合されることを可能にする柔軟なインターフェースを提供する利点をもたらすことを理解されたい。さらに、AACMM100とデバイス400の間で機能を共有する能力は、重複をなくすことによってAACMM100のサイズ、電力消費、および複雑性を削減することを可能にし得る。
【0043】
一実施形態において、コントローラ408は、AACMM100のプローブ端401の動作または機能を変更する可能性がある。例えば、コントローラ408は、デバイス400が装着されるときと、プローブ筐体102が単体で使用されるときとの異なるときに異なる色の光を放つ、異なる強さの光を放つ、または点く/消えるのいずれかを行うようにプローブ筐体102のインジケータライトを変更する可能性がある。一実施形態において、デバイス400は、物体までの距離を測定する距離測定センサ(図示せず)を含む。この実施形態において、コントローラ408は、物体がプローブチップ118からどのぐらい遠いかをオペレータに示すためにプローブ筐体102のインジケータライトを変更する可能性がある。これは、コントローラ420の要件を簡素化する利点をもたらし、アクセサリデバイスの追加による機能のアップグレードまたは向上を可能にする。
【0044】
図10〜11を参照すると、本発明の実施形態が、レーザラインプローブ(LLP)スキャンデバイス500用のカメラ、信号処理、制御、およびインジケータインターフェースに利点をもたらす。LLP500は、ハンドル部504を有する格納カバー502を含む。さらに、LLP500は、LLP500を本明細書において上で説明されたようにプローブ筐体102に機械的および電気的に結合するインターフェース426を一端に含む。インターフェース426は、LLP500が、追加的な道具を必要とせずに迅速かつ簡単にAACMM100に結合され、AACMM100から取り外されることを可能にする。インターフェース426の近くに、格納カバー502は、例えばレーザデバイスなどの光学式デバイス510と、センサ508とを含む部分506を含む。センサ508は、例えば、電荷結合素子(CCD)型のセンサまたは相補型金属酸化膜半導体(CMOS)型のセンサである可能性がある。例示的な実施形態において、光学式デバイス510およびセンサ508は、センサ508が所望の焦点で光学式デバイス510からの反射光を検出することができるように角度を付けて配置される。一実施形態において、光学式デバイス510およびセンサ508の焦点は、LLP500がプローブチップ118に邪魔されずに操作され得るようにプローブチップ118からずらされる。換言すれば、LLP500は、プローブチップ118を所定の位置に置いたまま操作され得る。さらに、LLP500は、プローブチップ118に対して相対的に実質的に固定され、ハンドル部504への力は、LLP500のプローブチップ118に対する相対的な配置に影響を与えない可能性があることを理解されたい。一実施形態において、LLP500は、オペレータがLLP500からのデータ取得とプローブチップ118からのデータ取得の間を切り替えることを可能にする追加的な作動装置(図示せず)を有する可能性がある。
【0045】
光学式デバイス510およびセンサ508は、格納カバー502内に配置されたコントローラ512に電気的に結合される。コントローラ512は、1つ以上のマイクロプロセッサ、デジタル信号プロセッサ、メモリ、および信号調整回路を含み得る。LLP500によってもたらされるデジタル信号処理および大きなデータ量のために、コントローラ512は、ハンドル部504内に配置される可能性がある。コントローラ512は、電気コネクタ434を介してアームバス218に電気的に結合される。LLP500は、LLP500による動作およびデータの取り込みを開始するためにオペレータによって手動で作動され得る作動装置514、516をさらに含む。
【0046】
本発明のその他の実施形態においては、AACMM100に結合されたデバイス600(図12)が、機能的デバイス602を含み得る。デバイス600の種類に応じて、機能的デバイス602は、スチルカメラ、ビデオカメラ、バーコードスキャナ、熱スキャナ、光源(例えば、フラッシュ装置)、または画像プロジェクタである可能性がある。一実施形態において、機能的デバイス602は、その全体を本願に援用する「Apparatus and Method for Relocating an Articulating−Arm Coordinate Measuring Machine」と題した同一出願人による米国特許第7,804,602号に記載された再帰反射体ホルダーなどの再帰反射体ホルダーを含み得る。さらに別の実施形態において、機能的デバイス602は、その全体を本願に引用して援用する「Method of Constructing a 3−Dimensional Map of a Measurable Quantity Using Three Dimensional Coordinate Measuring Apparatus」と題した同一所有者による米国特許第5,412,880号に記載された超音波プローブなどの超音波プローブを含み得る。デバイス600は、デバイスがプローブ筐体102に電気的および機械的に結合されることを可能にするインターフェース426を含む。デバイス600は、機能的デバイス602に電気的に接続されたコントローラをさらに含む。コントローラは、電子データ処理システム210と非同期双方向通信するように構成される。双方向通信接続は、(例えば、アームバス218を介した)有線、無線(例えば、BluetoothまたはIEEE802.11)である可能性がある。一実施形態において、通信接続は、有線接続と無線接続の組み合わせであり、第1の信号の種類がコントローラ420を介した有線接続によって送信され、第2の信号の種類が無線接続によって送信される。機能的デバイス602が画像プロジェクタおよびレーザラインプローブなどの複数の機能を含む実施形態においては、画像(例えば、CAD)データが、画像プロジェクタに無線接続によって送信され得る一方、LLPの画像センサによって得られたデータは、有線接続によって送信される。これらのデバイスの統合は、オペレータが、より速く、より高い信頼度で測定値を得ることを可能にする利点をもたらす可能性があることを理解されたい。例えば、スチルカメラまたはビデオカメラデバイスを装着すると、オペレータは、デバイスによって測定されている物体の1つ以上の画像を記録することができる。これらの画像は、例えば、ディスプレイ328に表示されるか、または検査レポートに組み込まれることができる。一実施形態において、オペレータは、ユーザインターフェース基板202を介して、測定点を定義するために、表示された画像にグラフィカルなマーカを置くことができる。このようにして、オペレータは、メモリから印を付けられた画像を後で呼び出し、どこを測定すべきかをすぐに見ることができる。その他の実施形態において、測定されている物体のビデオが、取り込まれる。そして、このビデオは、オペレータが検査されるべき次の物体に対して複数の測定を繰り返すのを補助するために、または新しいオペレータのための訓練ツールとしてユーザインターフェース基板202によって再生される。
【0047】
さらに別の実施形態において、デバイスは、ペイントスプレーデバイス700(図13)である可能性がある。ペイントスプレーデバイス700は、ペイントスプレーデバイス700をプローブ筐体102に電気的および機械的に結合するインターフェース426を含む。この実施形態において、デバイス700は、電子データ処理システム210と通信するように構成されたコントローラを含む。通信接続は、(例えば、アームバス218を介した)有線、無線(例えば、BluetoothもしくはIEEE802.11)、または有線接続と無線接続の組み合わせである可能性がある。デバイス700のコントローラは、電子データ処理システム210から信号を受信し、それぞれが単一の色の塗料を有するタンク704(例えば、赤、緑、青)にそれぞれ接続される1つ以上のスプレーノズル702から1つ以上の色を選択的に噴射する。スプレーノズル702は、塗料、インク、顔料、または染料の小滴を表面に付着させるインクジェット式のスプレー機構であってもよいことを理解されたい。インクジェットノズルは、コンティニュアス型インクジェット、サーマル方式インクジェット、およびピエゾ方式インクジェットを含む可能性があるが、これらに限定されない。電子データ処理システム210はプローブ筐体102の位置および向きを知っているので、デバイスは、メモリに記憶された所望の画像に一致するように特定の位置で特定の色を噴射する命令を受信する可能性がある。したがって、オペレータがデバイス700を所望の表面(例えば、壁)を横切って動かすときに、画像または絵が、デバイス700によって再現され得る。この実施形態は、例えば板金などの物品にレイアウトの印を付ける、製造環境における利点ももたらし得る。
【0048】
図13は、タンク704をAACMM100の外部にあるように示すが、これは例示を目的とするものであり、特許請求される発明はそのように限定されるべきでないことを理解されたい。一実施形態において、タンク704は、デバイス700のハンドル内に配置される。別の実施形態において、タンク704は基部116内に配置され、導管がアーム104を通って延び、システムにいかなる外部の配線、管、または導管も設けない。
【0049】
ここで図12および図14〜18を参照すると、1つ以上の画像プロジェクタ602を組み込むデバイス600の実施形態が、示されている。本発明の実施形態によれば、1つ以上の比較的小型の販売されているプロジェクタ(例えば、「超小型」または「ピコ」プロジェクタ)604が、AACMM100のプローブ端401、またはAACMM100のその他のさまざまな位置(例えば、ハンドルの反対側、アームセグメント上)に取り付けられるか、接続されるか、またはその他の方法で装着され得る。図14A〜14Dに、デバイス600にハンドル126に近接して取り付けられたプロジェクタ604が、示されている。しかし、プロジェクタ604は、AACMM100の任意の場所に取り付けられる可能性があり、AACMM100と連携して利用される場合、レーザラインプローブに取り付けられる可能性がある。プロジェクタ604は、いくらかの処理能力を含む可能性がある。一実施形態において、プロジェクタ604は、電子データ処理システム210に接続されるか、または電子データ処理システム210と通信している。したがって、プロジェクタ604は、視覚的な手引き情報またはデータ(例えば、画像606)を与えられることができ、次に、プロジェクタ604は、その視覚的な手引き情報またはデータを、図14Bの「位置1」に示されるように、AACMM100のオペレータによって測定されるか、またはその他の作業をされるべき部品または物体608に投影する。
【0050】
部品608の向きがAACMM100の座標系内で調整されると、投影画像606の縮尺およびその投影画像606の見え方が、アーム104の位置データを用いてAACMM100の動きと同期され得る。部品608に投影された画像606は、デバイス600が動かされるときに、部品608に投影された画像606が動かず、オペレータに対して安定した画像を示すために縮尺と向きの両方を変更するように、プローブ端401の位置に応じてプロジェクタ604に関連するプロセッサによって、または電子データ処理システム210を介して調整され得る。これは、図14Cの「位置2」に見られ得る。例として、色の付いた(例えば、緑)円610が、測定されるべき部品の穴612と位置が合うように投影され得る。部品608に対するプローブの角度または距離が変更されるとき、投影画像606内の円610の位置が変わるが、円610は穴612上の位置に「ロックされた」ままであり、穴612と同じサイズのままである。これは、目標をロックオンし、追跡することに相当する。この構成の利点は、オペレータがAACMM100を動かすときに、オペレータが部品608から目を離してコンピュータスクリーン、ユーザインターフェース、またはその他の視覚的表示を見る必要がないことである。
【0051】
先行技術の単純な格子線とは対照的に部品608上の投影画像を使用することは、これらに限定されないが以下のものを含む広範な投影情報のオプションを提供する。(1)色の制御−−赤い円が、測定を成功裏に完了した後、緑に変わる可能性がある。マーカまたはグラフィックスの色が、部品608の色に対して高い視認性(コントラスト)をもたらすように変わり得る。(2)アニメーション−−マーカ、矢印、またはその他のインジケータが、動作を開始または終了するために点滅し、頻度を変え、交互に色を変えることができる。(3)テキスト−−メッセージ、データ、または寸法が、部品に投影され得る。通常はコンピュータスクリーン上に表示されるデジタル式の読み取り値が、部品608に投影され得る。(4)CAD画像−−注意書き、寸法、またはその他の情報とともに部品に重ね合わされ得る。測定されるべき特徴が、順次、色またはアニメーションで強調され得る。(5)写真−−(設計通りの)部品の実画像が、測定されるべき部品に投影され、開け忘れた穴または誤った位置の特徴などの違っているあらゆることをすぐに示すことができる。(「手引きをともなう投影」、図15A参照)。(6)範囲インジケータ−−LLP500のような非接触式のデバイスに関して、範囲インジケータ614が、部品の表面608に投影され得る。これらは、アニメーションされ、色を付けられる可能性があり、テキストおよび/またはデータを含み得る。
【0052】
AACMM100は、図15Aに示されるように、プロジェクタ604を使用してオペレータに対して手引きを提供することもできる。プロジェクタ604は、測定デバイス118が測定点を得るべき場所にインジケータ616をやはり重ね合わせながら、測定が行われるべき特徴612を円610で強調する、部品608上の画像を生成する。テキスト形式の指示618も、部品608に投影され、重ね合わされる可能性がある。部品もしくは物体608の測定、または部品608の完全な一群の測定を行った後、結果のインジケータ620が、図15Bに示されるように、部品608に直接投影され得る。これは、許容範囲内のおよび/または許容範囲外の部品の特定の特徴を強調するために使用され得る。表面のスキャンに関して、高い点および低い点が、色分けされ、部品608に直接投影され得る。寸法を示された特徴の測定に関して、グラフィカルなまたはテキスト形式のインジケータ622が、部品608に投影され、特徴が許容範囲内であるかどうか、および/または許容範囲外であるかどうかをオペレータに知らせることができる。上で検討されたように、これは、オペレータが目を離してコンピュータ端末またはユーザインターフェースを見る必要がないので、部品608の検査に必要とされる時間を削減する利点をもたらす。
【0053】
プロジェクタ604は、白色光を投影することによって作業領域を照らすために使用されることもでき、照明のサイズおよび形状が制御され得る。加えて、照明の領域は、スポットライトの位置およびサイズがプローブ端401の位置データを使用して制御され得るので、デバイス600が動かされる間、ロックされ得る。プロジェクタ604が部品608のどこも照らすことができないようにデバイス600が向きを決められる場合(例えば、天井を向いているとき)、プロジェクタ604は、自動的に消えるか、または黒くなる可能性がある。
【0054】
図16〜17を参照すると、本発明の別の態様の実施形態にしたがって、複数のプロジェクタ604、624、626が、AACMM100とともに使用され得る。実施形態は、プロジェクタ624が壁628または作業台を指すことである。ここで、プロジェクタ624は、例えば、基部116上など、AACMM100の固定された(動かない)部分の可動式の(例えば、スイベルの)取り付け具に装着され得る。プロジェクタ624からの画像630は、プローブ端401に取り付けられたプロジェクタ604からの情報と同じ情報か、またはプロジェクタ604からの情報とは異なる情報を表示することができる。画像630は、第2当事者による観察用である可能性があるか、または画像630は、搭載アプリケーションソフトウェアの表示または補助的なコンピュータの表示を複製する働きをする可能性がある。このようにして、データは、拡大され得る(すなわち、広げられたカバー領域)か、またはデータは、測定セッション中にオペレータによってより容易に見られる表面628に投影され得る。
【0055】
さらに、AACMM100のプローブ端401に取り付けられた複数のプロジェクタ604、626は、表面領域のカバー範囲または3D形状のカバー範囲を広げ、したがって、画像のカバー範囲から外れることなくプローブ端401の比較的大きな動きに対応することができる。画像の外形は、部品608の外形に合わせられ得る。
【0056】
図18を参照すると、本発明の別の態様の実施形態にしたがって、プロジェクタ604が取り付けられたAACMM100が、オペレータに対して視覚的な作業の手引きを提供することができる。そのような視覚的な作業の手引きは、表面またはその他の種類の障害物(例えば、壁または人間の皮膚)によって視界から隠されている物体または物品の特徴の視覚化の形態である可能性がある。例えば、プロジェクタ604は、アクセスされ、作業される必要がある、表面632の裏の1つ以上の物体634、636または物品を有するさまざまな表面632にCADデータ、CATスキャンデータ、レーザスキャンデータ、またはその他のデータを投影することができる。しかし、その他の物体に対する損傷が引き起こされないように、またはこれらの隠された物体634、636の位置を見つけることに浪費される時間を削減するために、作業者がこれらの物体の正確な位置を特定することが重要である。表面632は、作業されるべき特徴または物体を隠す壁、組立品、人体の表面、またはその他の種類の表面である可能性がある。
【0057】
図18は、壁の表面632に投影された画像638の例を示す。壁の表面632の裏には、間柱634、配管パイプ636、および電気配線などのさまざまな物品がある。しかし、作業者は、何が壁の表面632の裏に配置されているかを知らない可能性があり、および/または壁の表面632の裏のこれらの物品の配置を知らない。作業者に、壁の表面632の裏の物品およびそれらの物品の位置の画像を提供することが有利である。概して、隠された特徴についてのこの情報は、例えば、CADデータとして利用可能である。
【0058】
別の応用において、AACMM100は、例えば、手術室で使用され得る。医師が、可搬型のAACMMを使用して、プローブまたは測定デバイス118の位置とコンピュータ体軸断層撮影(Computer Axial Tomography)データからの3Dデータとの相関をとりながら、切開するためのまたは腫瘍を見つけるための位置を決定することができる。この場合、プロジェクタ604は、患者に画像を投影し、マーカ、またはCATスキャン画像のそのままの複製を提供して外科医を手引きすることができる。手動操作式のロボットによって遠隔で行われる手術は、上述したのと同じ方法で投影システムを使用することができる。
【0059】
AACMMが製造環境で使用される応用において、プロジェクタ604は、3D CADまたは画像ファイルによって制御される配置を必要とするさまざまなオペレーションのための手引きを提供し得る。これは、例えば、リベット、機器、アクセサリのために穴を開けることと、車、飛行機、バス、または大きな部品にステッカまたは裏に接着剤がついた帯を張り付けることと、文字、細部装飾、または画像を塗装することと、製図の要求に一致するまで表面または溶接部を研削/研磨することと、釘またはねじの位置に関して、外装の裏にある間柱または構造部材の位置を見つけることとを含む。
【0060】
本発明のこの態様の実施形態は、壁、隔壁、床の下、または鍵のかかったドアの裏のパイプ、配線、ダクト、またはその他の物体などの隠された特徴を視覚化し、どこが安全に切断できるかを判断するのを助ける。また、これらの実施形態は、(例えば、デバイスの3D CADデータが利用可能なときに)爆発物の危険なコンポーネントに穴を開ける、そのようなコンポーネントを切断する、およびそのようなコンポーネントにアクセスするための投影された視覚化および手引きを提供する。
【0061】
本発明のこの態様の実施形態によれば、AACMM用の投影システムが、部品の表面に手引きおよび部品のデータ(例えば、構造のCADデータ)を投影する。また、この投影システムは、建造物の改造、手術、またはその他の侵襲的な処置で使用するための、壁、構造物、または人体の内部にあるものの画像を投影するために使用され得る。アームに装着された1つ以上の小型プロジェクタが、部品もしくは表面に画像もしくはデータを投影するか、またはオペレータに対する手引きを提供することができる。アーム/プロジェクタの組み合わせは、壁の後ろ、人体の内側、爆発するデバイスの内側などの特徴を視覚化することができる。物体の3Dの記録(例えば、CADの図面、CATのスキャンなど)が存在するとき、プロジェクタとアームの組み合わせは、あたかも壁を透かして見るように特徴の位置を示す画像を投影することができる。
【0062】
図19を参照すると、アームバス218の実施形態が、全体的に示されている。図19のアームバス218は、バスA1904、バスB1905、バスC1906、トリガバス1907、および取り込みバス1908を含む。デバイスデータバス1902は、バスB1905およびバスC1906を含む。バスA1904は、エンコーダデータバスとも呼ばれる。本明細書において使用されるとき、用語「バス」および「配線」は、同期パルスおよび/またはデータなどの信号を送信するための伝送媒体を指すために交換可能なように使用される。
【0063】
図19は、2つの連続領域1909を示す。これらは、追加的なエンコーダアームバスIF214が挿入され得る領域である。例えば、AACMM100に7つのエンコーダアームバスIF214が存在する可能性がある。基部プロセッサ基板204を含むAACMM100の基部116は、図19の左側にある。プローブ端401および交換可能なデバイス(400、500、600、700など)は、図19の右側にある。
【0064】
取り込みバス1908は、データがすべてのAACMMのセンサデバイスによって同時に取り込まれるように、基部プロセッサ基板204からエンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラ(コントローラ408、512、または600、700内のコントローラなど)に取り込み信号(または同期パルス)を送信する。一実施形態において、図19に示された取り込みバス1908は、(例えば、約700ヘルツで動作する1つ以上の信号を有する)差動配線の対によって実装される。取り込みバス1908上の取り込み信号は、エンコーダDSP216と、プローブ端DSP228と、交換可能なデバイスのコントローラとにほとんど同時に到達する。その他の実施形態において、一群の差動配線の対が、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラのすべてに並列に接続される可能性がある。当業者に理解され得るように、取り込みバス1908の実装は、上述の実施形態に限定されず、これらに限定されないが、シングルエンド配線の使用、または異なる速度の配線の使用など、当技術分野で知られている任意の方法でやはり実装され得る。一実施形態において、取り込み信号の送信は、受信するDSPの基部プロセッサ204からの距離に基づいて時間差をつけられる。
【0065】
アームバス218の一部であるエンコーダデータバス1904およびデバイスデータバス1902は、独立にかつ同時に動作し、それによって、データがそれらのバスの両方で同時に送信されることを可能にする。取り込みバス1908上の取り込み信号は、AACMMのセンサデータを同時にラッチし、次に、それらのセンサデータが、エンコーダデータバス1904およびデバイスデータバス1902に送信される。一実施形態において、取り込み信号のレートは、AACMM100内のセンサデバイスからデータを収集し、処理するために必要とされる時間によって決められる。一実施形態において、エンコーダデータバス1904およびデバイスデータバス1902は、非同期バスである。一実施形態において、エンコーダデータバス1904およびデバイスデータバス1902は、無線バスである。
【0066】
エンコーダデータバス1904は、エンコーダDSP216のそれぞれを基部プロセッサ204に接続する。エンコーダデータバス1904は、例えば、エンコーダデータバス1904上で搬送される差動対信号とDSP216のポートに送信されるシングルエンド信号との間の変換を行うことができるエンコーダアームバスIF214によって各エンコーダDSP216へのインターフェースをとられる。エンコーダデータバス1904上で送信されるデータは、AACMMに配置された測定デバイス(例えば、プローブ118)の座標を決定するために使用される。エンコーダデータバス1904は、エンコーダDSP216からのアーム位置信号を要求するため、およびDSP216からの位置信号を受信するために基部プロセッサ基板204によって使用される。エンコーダデータバス1904は、2方向トラフィックに対応するために半二重モードで動作することができる。図19に示されたエンコーダデータバス1904は、(例えば、約3メガビット/秒でデータを転送する)差動配線の単一の組によって実装され得る。その他の実施形態において、エンコーダデータバス1904は、複数のパラレルバスとして実装される。当業者に理解され得るように、エンコーダデータバス1904の実装は、上述の実施形態に限定されない。エンコーダデータバス1904は、これらに限定されないが、シングルエンド配線の使用、または異なる速度でのデータ転送など、当技術分野で知られている任意の方法で実装され得る。
【0067】
エンコーダデータバス1904は、エンコーダアームバスインターフェース214を介したエンコーダDSP216からの位置信号(例えば、エンコーダ読み取りヘッドインターフェース234からのカウント)と、温度センサ212からの温度データと、プローブ端DSP228を介した任意の装着された測定デバイス(例えば、プローブ、取り外し可能なように結合されたアクセサリデバイス)に関するボタン選択状態とを送信する。
【0068】
デバイスデータバス1902上で送信されるデータは、アームに装着される(例えば、取り外し可能なように装着される)アクセサリデバイス(例えば、LLP500、機能的デバイス600、ペイントスプレーデバイス700)からのデータを含む。アクセサリデバイスからのデータは、アクセサリデバイスに関連するコントローラ(例えば、408、512、または600、700内のコントローラ)によって処理され、次いで、アームバス218内のバスB1905またはバスC1906上に直接乗せられることができる。代替的に、アクセサリからのデータは、プローブ端DSP228に送信されることができ、プローブ端DSP228で、そのデータは、アームバス218内のバスBまたはバスCに渡される前にさらに処理されることができる。デバイスデータバス1902は、測定デバイスに取り外し可能なように結合されるアクセサリデバイスからのアクセサリデバイスデータを要求するため、およびアクセサリデバイスのコントローラまたはDSPを受信するために基部プロセッサ基板204によって使用される。そのようなコントローラは、プローブ端DSP228であるか、またはアクセサリデバイス内のコントローラ(例えば、408、512、もしくは600、700内のコントローラ)である可能性がある。アクセサリデバイスデータは、これらに限定されないが、アクセサリデバイスがカメラであるときの画像データ、アクセサリデバイスがビデオレコーダであるときのビデオデータ、およびアクセサリデバイスがLLPであるときの2次元重心データ(COG)などの、アクセサリデバイスによって生成された任意のデータを含む。一実施形態において、デバイスデータバス1902は、これらに限定されないが、アクセサリデバイスが生成するデバイスデータの種類、およびアクセサリデバイスがデバイスデータを送信するレートなどのアクセサリデバイスの特性を特定するデータも受信する。デバイスデータバス1902は、2方向トラフィックに対応するために半二重モードで動作することができる。図19に示されたデバイスデータバス1902は、(例えば、約6メガビット/秒で組み合わされたデータを転送する)差動配線の2つの組によって実装され得る。当業者に理解され得るように、デバイスデータバス1902の実装は、上述の実施形態に限定されず、これらに限定されないが、シングルエンド配線の使用、または異なる速度でのデータ転送など、当技術分野で知られている任意の方法でやはり実装され得る。
【0069】
バスB1905およびバスC1906は、各エンコーダアームバスIF214に入り、各エンコーダアームバスIF214から出ていく。バスBまたはバスC上を伝わる信号を異なる形式に(例えば、差動ペアからシングルエンドに、またはその逆に)変換する必要はないので、一実施形態におけるエンコーダアームバスIF214は、バスBおよびバスC上を伝わるデータに関する単純なパススルー(pass−through)として機能する。
【0070】
トリガバス1907は、AACMM100内のセンサからのトリガ信号を基部プロセッサ基板204に搬送する。トリガバス1907上で搬送されるトリガ信号は、基部プロセッサ基板204へのアクションの要求として機能する。トリガ信号の典型例は、プローブが物体に接触させられるかまたは物体に近づけられるときに電子的に応答する種類のプローブである接触トリガプローブ(touch trigger probe)によって生成されるトリガ信号である。一実施形態において、接触トリガプローブは、基部プロセッサ基板204にトリガ信号を送信し、基部プロセッサ基板204は、当該トリガ信号を、取り込みバス1908を介して取り込み信号を直ちに送信するようにとの要求として扱う。基部プロセッサは、取り込み信号を送出し、AACMM100のすべてのエンコーダの読み取り値がラッチされるようにする。その結果、エンコーダの読み取り値が、接触トリガプローブのチップが物体に接触する瞬間に高い精度で同期される。トリガバスは、接触トリガプローブを用いたこの用途に限定されず、さまざまな異なるセンサからのトリガ信号を基部プロセッサ基板204に搬送することができる。さらに、トリガバスからのトリガ信号は、基部プロセッサ基板204の代わりに、または基部プロセッサ基板204に加えて外部コンピュータによって使用され得る。また、基部プロセッサ基板204または外部コンピュータは、トリガバス1907によって搬送されたトリガ信号にさまざまな方法で応答し得る。
【0071】
図19においてバス1904〜1908の隣の矢印によって示されるように、バスA、バスB、およびバスCは、双方向であり、したがって、信号が、これら3つのバスを介して基部プロセッサ基板204から送信され、基部プロセッサ基板204によって受信される。トリガバス1907は、一方向であり、したがって、トリガバス1907によって搬送されるトリガ信号は、基部プロセッサ基板204によって受信されるが、基部プロセッサ基板204から送信されない。取り込みバス1908も、一方向であり、したがって、取り込みバス1908によって搬送される取り込み信号は、基部プロセッサ基板204から送信されるが、基部プロセッサ基板204によって受信されない。
【0072】
図20は、一実施形態による、AACMMにおけるデータ取り込みのプロセスフローである。図20に示されたプロセスフローは、基部プロセッサ基板204によって開始される。ステップ2002において、基部プロセッサ基板204が、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラ(コントローラ408、512、または600、700内のコントローラなど)に取り込みバス1908上で取り込み信号を送信する。取り込み信号は、定期的なポーリングプロセスの結果としてか、またはトリガバス1907上のトリガ信号から受信された要求の結果としてかのいずれかで基部プロセッサ基板204によって開始される。ステップ2004において、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラが、取り込み信号の受信に応答してデータを取り込む(またはラッチする)。エンコーダDSP216は、エンコーダのカウントおよび温度などのデータをラッチする。プローブ端DSP228は、測定デバイスおよび/またはアクセサリデバイスの任意のボタンの状態を示すボタン押下状態をラッチする。交換可能なデバイスのコントローラからのデータは、デバイスデータバス1902に直接乗せられ得るか、またはそれらのデータは、デバイスデータバス1902に乗せられる前に処理するためにプローブ端DSP228に最初に送信され得る。
【0073】
ステップ2006において、基部プロセッサ基板204が、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラ(コントローラ408、512、または600、700内のコントローラなど)からの取り込まれたデータを収集する。一実施形態において、これは、基部プロセッサ204が、アドレスと、取り込まれたデータ(例えば、位置信号)を要求するコマンドとを(例えば、パケットで)送信することによって実行される。第1のエンコーダDSP216が、パケット内のアドレスをそのエンコーダDSP216自体のアドレスであると認識し、基部プロセッサ基板204に取り込まれたデータを返す。基部プロセッサ基板204は、エンコーダDSP216の残り、プローブ端DSP228、および交換可能なデバイスのコントローラからの取り込まれたデータをエンコーダデータバス1904上で引き続き要求し、受信する。基部プロセッサ基板204は、取り込まれたデータのすべてを受信し終わるまで一度に1つずつDSPおよびコントローラからデータを受信する。ステップ2008において、基部プロセッサ基板204が、所与の取り込み信号に対する位置信号およびボタン押下状態のすべてが相互に関連付けられるように、収集されたデータをまとめる。次に、処理はステップ2002で継続し、別の取り込み信号が、エンコーダDSP216、プローブ端DSP228、および交換可能なデバイスのコントローラに送信される。処理は、ステップ2010でやはり継続し、ステップ2010において、基部プロセッサ204が、処理されていない取り込まれたデータから3次元位置データ(x,y,z)およびボタン状態を生成する。計算ステップ2010によって実行されるアクションは、データ収集ステップ2002〜2008のアクションと並列に実行される可能性がある。代替的に、2010のアクションは、ステップ2002〜2008によって十分なデータが収集された後に実行される可能性がある。後者の場合、ステップ2010の完了が、ステップ2002〜2008におけるさらなるデータの収集を引き起こす可能性がある。2つのあり得る経路(並列的なまたは逐次的なデータ収集/計算)は、ステップ2008および2010からのフィードバックループの破線によって示されている。
【0074】
一実施形態において、ステップ2002から2008は、AACMM100が稼働している間、継続的に実行される。さらに、接触プローブがAACMMに接続される場合、接触プローブは、(例えば、プローブチップが物体に接触するか、または接触しそうなときに)取り込み信号の発行を要求することができる。
【0075】
図21は、一実施形態による、エンコーダデータバス1904上のエンコーダデータおよびデバイスデータバス1902からのアクセサリデータの同時取り込みのプロセスフローである。図21に示されたプロセスフローは、アクセサリデバイス(例えば、LLP、カメラ)がAACMM100に装着されているときに実行される。ステップ2102において、アクセサリデバイスが、AACMM100のハンドルにおいて検出される。ステップ2104および2106は、測定されている物体に関する位置信号およびデバイスデータを収集するために並列に(例えば、同時に)実行される。ステップ2106において、位置信号が、エンコーダデータバス1904を介して位置信号を送信することによって収集され、アクセサリデータが、デバイスデータバス1902上でアクセサリデータを送信することによって収集される。ステップ2108において、収集されたデータが、物体上の点の3次元座標である可能性がある所望の結果を生成するために処理される。一実施形態において、アクセサリデバイスは、LLPであり、デバイスデータバス1902上のデータは、重心(COG)データを含む。このデータは、物体上の一群の点に関する3次元(3D)座標を得るために、エンコーダDSP216からの位置信号と組み合わされる。別の実施形態において、アクセサリデバイスは、カメラであり、カメラからのデータは、画像データを含む。この画像データは、画像に1つ以上の3Dデータの点を重ね合わせるために位置信号と組み合わされる。一実施形態において、収集されたデータは、外部コンピュータにエクスポートされ、ステップ2108は、外部コンピュータで実行される。任意的なステップ2110において、物体の図が、AACMM100のカラーLCD338に表示される。ステップ2108の収集されたデータの処理は、データ収集ステップ2104および2106と並列に実行され得るか、またはステップ2108は、ステップ2104および2106の後に実行され得る。後者の場合、ステップ2108の計算の完了が、ステップ2104および2106におけるデータ収集の新たなサイクルを開始する可能性がある。
【0076】
図20および21は、物体の寸法の特性についての情報を提供するために基部プロセッサ基板204によってデータがどのように収集されるかを示す。別の動作モードにおいて、基部プロセッサ基板204は、もっぱらデータを送信する可能性がある。もっぱらデータを送信する2つのデバイスの例は、画像プロジェクタおよびペイントスプレーヤである。
【0077】
技術的効果および利点は、1つのバス上のアームの位置信号および第2のバス上のアクセサリデバイスデータを同時に送信する能力を含む。これは、各取り込み信号に応答してより多くのデータが収集されることを可能にすることによって、システムの性能およびスループットの向上をもたらすことができる。加えて、AACMM100は、すべてのアクセサリデバイスが、位置データを収集するために利用される内部バスに準拠していることを必要としないので、より広範なアクセサリデバイスをサポートすることができる可能性がある。
【0078】
当業者に理解されるであろうように、本発明の態様は、システム、方法、またはコンピュータプログラム製品として具現化され得る。したがって、本発明の態様は、すべてハードウェアの実施形態、すべてソフトウェアの実施形態(ファームウェア、常駐ソフトウェア、マイクロコードなどを含む)、またはすべてが概して本明細書において「回路」、「モジュール」、もしくは「システム」と呼ばれることがあるソフトウェアの態様とハードウェアの態様とを組み合わせる実施形態の形態をとる可能性がある。さらに、本発明の態様は、コンピュータ可読プログラムコードを具現化する1つ以上のコンピュータ可読媒体で具現化されるコンピュータプログラム製品の形態をとる可能性がある。
【0079】
1つ以上のコンピュータ可読媒体の任意の組み合わせが、利用され得る。コンピュータ可読媒体は、コンピュータ可読信号媒体またはコンピュータ可読ストレージ媒体である可能性がある。コンピュータ可読ストレージ媒体は、これらに限定されないが、例えば、電子的、磁気的、光学的、電磁的、赤外線、もしくは半導体システム、装置、もしくはデバイス、またはこれらの任意の好適な組み合わせである可能性がある。コンピュータ可読媒体のより具体的な例(非網羅的なリスト)は、以下、すなわち、1つ以上の配線を有する電気的な接続、持ち運び可能なコンピュータディスケット、ハードディスク、ランダムアクセスメモリ(RAM)、読み出し専用メモリ(ROM)、消去可能プログラマブル読み出し専用メモリ(erasable programmable read−only memory)(EPROMもしくはフラッシュメモリ)、光ファイバ、持ち運び可能なコンパクトディスク読み出し専用メモリ(CD−ROM)、光学式ストレージデバイス、磁気式ストレージデバイス、またはこれらの任意の好適な組み合わせを含む。本明細書の文脈においては、コンピュータ可読ストレージ媒体は、命令実行システム、装置、もしくはデバイスによる使用のための、または命令実行システム、装置、もしくはデバイスに関連するプログラムを含むかまたは記憶することができる任意の有形の媒体である可能性がある。
【0080】
コンピュータ可読信号媒体は、例えば、ベースバンドで、または搬送波の一部としてコンピュータ可読プログラムコードを具現化する伝播されるデータ信号を含み得る。そのような伝播される信号は、電磁的、光学的、またはこれらの任意の好適な組み合わせを含むがそれらに限定されないさまざまな形態のうちの任意の形態をとり得る。コンピュータ可読信号媒体は、コンピュータ可読ストレージ媒体ではなく、命令実行システム、装置、もしくはデバイスによる使用のための、または命令実行システム、装置、もしくはデバイスに関連するプログラムを伝達、伝播、または搬送することができる任意のコンピュータ可読媒体である可能性がある。
【0081】
コンピュータ可読媒体上に具現化されたプログラムコードは、無線、有線、光ファイバケーブル、RFなど、またはこれらの任意の好適な組み合わせを含むがこれらに限定されない任意の適切な媒体を用いて送信され得る。
【0082】
本発明の態様のオペレーションを実行するためのコンピュータプログラムコードは、Java(登録商標)、Smalltalk、C++、C#などのオブジェクト指向プログラミング言語と、「C」プログラミング言語または同様のプログラミング言語などの通常の手続き型プログラミング言語とを含む1つ以上のプログラミング言語の任意の組み合わせで記述され得る。プログラムコードは、すべてユーザのコンピュータ上で、スタンドアロンのソフトウェアパッケージとしてユーザのコンピュータ上で部分的に、ユーザのコンピュータ上で部分的にかつ遠隔のコンピュータ上で部分的に、またはすべて遠隔のコンピュータもしくはサーバ上で実行され得る。後者の場合、遠隔のコンピュータが、ローカルエリアネットワーク(LAN)もしくは広域ネットワーク(WAN)を含む任意の種類のネットワークを介してユーザのコンピュータに接続され得るか、または外部コンピュータへの接続が(例えば、インターネットサービスプロバイダを使用してインターネットを介して)行われ得る。
【0083】
本発明の態様が、本発明の実施形態による方法、装置(システム)、およびコンピュータプログラム製品の流れ図および/または構成図を参照して説明されている。流れ図および/または構成図の各ブロックと、流れ図および/または構成図のブロックの組み合わせとは、コンピュータプログラム命令によって実装され得ることが理解されるであろう。
【0084】
これらのコンピュータプログラム命令は、コンピュータまたはその他のプログラム可能なデータ処理装置のプロセッサによって実行される命令が、流れ図および/または構成図の1つのブロックまたは複数のブロックで規定された機能/動作を実施するための手段をもたらすように、多目的コンピュータ、専用コンピュータ、または機械を製造するためのその他のプログラム可能なデータ処理装置のプロセッサに与えられ得る。これらのコンピュータプログラム命令は、コンピュータ可読媒体に記憶された命令が、流れ図および/または構成図の1つのブロックまたは複数のブロックで規定された機能/動作を実施する命令を含む製品をもたらすように、コンピュータ、その他のプログラム可能なデータ処理装置、またはその他のデバイスを特定の方法で機能させることができるコンピュータ可読媒体に記憶される可能性もある。
【0085】
コンピュータプログラム命令は、コンピュータまたはその他のプログラム可能な装置で実行される命令が、流れ図および/または構成図の1つのブロックまたは複数のブロックで規定された機能/動作を実施するためのプロセスを提供するように、コンピュータで実施されるプロセスを生成するために一連のオペレーションのステップがコンピュータ、その他のプログラム可能な装置、またはその他のデバイスで実行されるようにするために、コンピュータ、その他のプログラム可能なデータ処理装置、またはその他のデバイスにロードされる可能性もある。
【0086】
図面の流れ図および構成図は、本発明のさまざまな実施形態によるシステム、方法、およびコンピュータプログラム製品のあり得る実装のアーキテクチャ、機能、およびオペレーションを示す。その際、流れ図または構成図の各ブロックは、(1つ以上の)規定された論理的な機能を実装するための1つ以上の実行可能命令を含むモジュール、セグメント、またはコードの一部を表す可能性がある。一部の代替的な実装において、ブロックで示された機能が、図面に示された順序とは異なる順序で行われ得ることにも留意されたい。例えば、連続で示された2つのブロックが、実際には実質的に同時に実行される可能性があり、またはそれらのブロックは、関連する機能に応じて逆順に実行される場合もあり得る。構成図および/または流れ図の各ブロックと、構成図および/または流れ図のブロックの組み合わせとは、規定された機能もしくは動作を実行する専用のハードウェアに基づくシステム、または専用のハードウェアとコンピュータ命令の組み合わせによって実装され得ることも認識されるであろう。
【0087】
本発明が例示的な実施形態を参照して説明されたが、本発明の範囲を逸脱することなくさまざまな変更が行われる可能性があり、均等物が本発明の要素の代替とされる可能性があることが当業者に理解されるであろう。さらに、特定の状況または構成要素を本発明の教示に適合させるために、本発明の本質的な範囲を逸脱することなく多くの修正が行われ得る。したがって、本発明は本発明を実施するための考えられる最良の形態として開示された特定の実施形態に限定されず、本発明は添付の特許請求の範囲内に入るすべての実施形態を含むことが意図される。さらに、用語「第1」、「第2」などの使用はいかなる順序または重要度も表さず、むしろ用語「第1」、「第2」などはある要素を別の要素と区別するために使用される。その上、用語「a」、「an」などの使用は量の限定を表さず、むしろ言及される項目の少なくとも1つの存在を表す。
【特許請求の範囲】
【請求項1】
可搬型の関節アーム座標測定機(AACMM)であって、
反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、前記アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、
前記第1の端部に結合された測定デバイスと、
前記少なくとも1つの位置トランスデューサからの前記位置信号を受信し、前記測定デバイスの位置に対応するデータを提供するように構成された電子回路と、
前記測定デバイスと前記第1の端部の間に配置されたプローブ端と、
前記プローブ端に取り外し可能なように結合されたアクセサリデバイスと、
前記少なくとも1つのトランスデューサおよび前記電子回路に結合されたエンコーダデータバスであって、少なくとも1つの配線を含み、前記電子回路に前記位置信号を送信するように構成された、エンコーダデータバスと、
前記アクセサリデバイスおよび前記電子回路に結合された第1のデバイスデータバスであって、少なくとも1つの配線を含み、前記アクセサリデバイスから前記電子回路にアクセサリデバイスデータを送信するために、前記エンコーダデータバスと同時に、前記エンコーダデータバスとは独立して動作するように構成された、第1のデバイスデータバスとを含むことを特徴とする可搬型の関節アーム座標測定機(AACMM)。
【請求項2】
請求項1に記載の可搬型のAACMMであって、前記位置信号が、カウントを含むことを特徴とする可搬型のAACMM。
【請求項3】
請求項1に記載の可搬型のAACMMであって、前記アクセサリデバイスが、レーザラインプローブ、カメラ、バーコードスキャナ、熱スキャナ、ビデオカメラ、光源、画像プロジェクタ、マイクロホン、音声記録システム、およびペイントスプレーノズルのうちの少なくとも1つを含むことを特徴とする可搬型のAACMM。
【請求項4】
請求項3に記載の可搬型のAACMMであって、前記測定デバイスが、接触プローブであることを特徴とする可搬型のAACMM。
【請求項5】
請求項3に記載の可搬型のAACMMであって、前記測定デバイスが、前記アクセサリデバイスであることを特徴とする可搬型のAACMM。
【請求項6】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスが、前記測定デバイスに結合されることを特徴とする可搬型のAACMM。
【請求項7】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスが、前記プローブ端または前記測定デバイスから前記電子回路にボタン選択を送信するようにさらに構成されることを特徴とする可搬型のAACMM。
【請求項8】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスが、前記アクセサリデバイスから前記電子回路にボタン選択データを送信するようにさらに構成されることを特徴とする可搬型のAACMM。
【請求項9】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスが、前記アームセグメントから前記電子回路に温度データを送信するようにさらに構成されることを特徴とする可搬型のAACMM。
【請求項10】
請求項1に記載の可搬型のAACMMであって、前記第1のデバイスデータバスが、前記アクセサリデバイスの特性を特定するためのデータを前記アクセサリデバイスから前記電子回路に送信するようにさらに構成されることを特徴とする可搬型のAACMM。
【請求項11】
請求項1に記載の可搬型のAACMMであって、前記測定デバイスが接触プローブであり、前記アクセサリデバイスがレーザラインプローブ(LLP)であり、前記アクセサリデバイスデータが前記LLPによって生成された複数の2次元データ値を含むことを特徴とする可搬型のAACMM。
【請求項12】
請求項1に記載の可搬型のAACMMであって、前記測定デバイスが接触プローブであり、前記アクセサリデバイスがカメラであり、前記アクセサリデバイスデータがカメラによって生成された画像データを含むことを特徴とする可搬型のAACMM。
【請求項13】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、非同期バスであることを特徴とする可搬型のAACMM。
【請求項14】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、異なる速度で動作することを特徴とする可搬型のAACMM。
【請求項15】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、異なるバス幅を有することを特徴とする可搬型のAACMM。
【請求項16】
請求項1に記載の可搬型のAACMMであって、前記アクセサリデバイスおよび前記電子回路に接続された第2のデバイスデータバスであって、前記エンコーダデータバスとは独立して動作するように構成された、第2のデバイスデータバスをさらに含むことを特徴とする可搬型のAACMM。
【請求項17】
可搬型の関節アーム座標測定機(AACMM)であって、
反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、前記アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、
前記第1の端部に結合された測定デバイスと、
前記少なくとも1つの位置トランスデューサからの前記位置信号を受信し、前記測定デバイスの位置に対応するデータを提供するように構成された電子回路と、
前記測定デバイスと前記第1の端部の間に配置されたプローブ端と、
前記少なくとも1つのトランスデューサおよび前記電子回路に結合されたエンコーダデータバスであって、少なくとも1つの配線を含み、前記電子回路に前記位置信号を送信するように構成された、エンコーダデータバスと、
前記測定デバイスおよび前記電子回路に結合された第1のデバイスデータバスであって、少なくとも1つの配線を含み、前記エンコーダデータバスと同時に、前記エンコーダデータバスとは独立して動作するように構成された、第1のデバイスデータバスとを含むことを特徴とする可搬型の関節アーム座標測定機(AACMM)。
【請求項18】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、非同期バスであることを特徴とする可搬型のAACMM。
【請求項19】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、異なる速度で動作することを特徴とする可搬型のAACMM。
【請求項20】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、異なるバス幅を有することを特徴とする可搬型のAACMM。
【請求項21】
請求項17に記載の可搬型のAACMMであって、前記測定デバイスおよび前記電子回路に接続された第2のデバイスデータバスであって、前記エンコーダデータバスとは独立して動作するように構成された、第2のデバイスデータバスをさらに含むことを特徴とする可搬型のAACMM。
【請求項22】
請求項17に記載の可搬型のAACMMであって、前記位置信号が、カウントを含むことを特徴とする可搬型のAACMM。
【請求項23】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスが、さらに、前記測定デバイスから前記電子回路にボタン選択データを送信するためのものであることを特徴とする可搬型のAACMM。
【請求項24】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスが、さらに、前記アームセグメントから前記電子回路に温度データを送信するためのものであることを特徴とする可搬型のAACMM。
【請求項25】
可搬型の関節アーム座標測定機(AACMM)を動作させる方法であって、
前記可搬型のAACMMの電子回路によってエンコーダデータバスを介して位置信号を受信するステップであって、前記可搬型のAACMMが、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部、前記第1の端部に結合された測定デバイス、前記測定デバイスと前記第1の端部の間に配置されたプローブ端、前記プローブ端に取り外し可能なように結合されたアクセサリデバイス、前記電子回路、少なくとも1つの配線を含み、前記少なくとも1つの位置トランスデューサおよび前記電子回路と通信しているエンコーダデータバス、ならびに少なくとも1つの配線を含み、前記アクセサリデバイスおよび前記電子回路と通信しているデバイスデータバスを含む、ステップと、
前記電子回路で前記デバイスデータバスを介して前記アクセサリデバイスからアクセサリデバイスデータを受信するステップであって、前記デバイスデータバスが、前記エンコーダデータバスと同時に、前記エンコーダデータバスとは独立して動作する、ステップとを含むことを特徴とする方法。
【請求項26】
請求項25に記載の方法であって、前記位置信号および前記アクセサリデバイスデータを外部コンピュータにエクスポートするステップをさらに含むことを特徴とする方法。
【請求項27】
請求項25に記載の方法であって、測定されている物体の図を生成するために前記位置信号および前記アクセサリデバイスデータを組み合わせるステップをさらに含むことを特徴とする方法。
【請求項28】
請求項25に記載の方法であって、測定されている物体を前記可搬型のAACMMに配置されたユーザインターフェースに表示するステップをさらに含むことを特徴とする方法。
【請求項29】
請求項25に記載の方法であって、前記測定デバイスが接触プローブであり、前記アクセサリデバイスがレーザラインプローブであり、前記アクセサリデバイスデータが前記レーザラインプローブによって生成された複数の2次元値であることを特徴とする方法。
【請求項30】
請求項25に記載の方法であって、前記測定デバイスが接触プローブであり、前記アクセサリデバイスがカメラであり、前記アクセサリデバイスデータが画像データであることを特徴とする方法。
【請求項31】
請求項25に記載の方法であって、前記測定デバイスが、前記アクセサリデバイスであることを特徴とする方法。
【請求項1】
可搬型の関節アーム座標測定機(AACMM)であって、
反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、前記アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、
前記第1の端部に結合された測定デバイスと、
前記少なくとも1つの位置トランスデューサからの前記位置信号を受信し、前記測定デバイスの位置に対応するデータを提供するように構成された電子回路と、
前記測定デバイスと前記第1の端部の間に配置されたプローブ端と、
前記プローブ端に取り外し可能なように結合されたアクセサリデバイスと、
前記少なくとも1つのトランスデューサおよび前記電子回路に結合されたエンコーダデータバスであって、少なくとも1つの配線を含み、前記電子回路に前記位置信号を送信するように構成された、エンコーダデータバスと、
前記アクセサリデバイスおよび前記電子回路に結合された第1のデバイスデータバスであって、少なくとも1つの配線を含み、前記アクセサリデバイスから前記電子回路にアクセサリデバイスデータを送信するために、前記エンコーダデータバスと同時に、前記エンコーダデータバスとは独立して動作するように構成された、第1のデバイスデータバスとを含むことを特徴とする可搬型の関節アーム座標測定機(AACMM)。
【請求項2】
請求項1に記載の可搬型のAACMMであって、前記位置信号が、カウントを含むことを特徴とする可搬型のAACMM。
【請求項3】
請求項1に記載の可搬型のAACMMであって、前記アクセサリデバイスが、レーザラインプローブ、カメラ、バーコードスキャナ、熱スキャナ、ビデオカメラ、光源、画像プロジェクタ、マイクロホン、音声記録システム、およびペイントスプレーノズルのうちの少なくとも1つを含むことを特徴とする可搬型のAACMM。
【請求項4】
請求項3に記載の可搬型のAACMMであって、前記測定デバイスが、接触プローブであることを特徴とする可搬型のAACMM。
【請求項5】
請求項3に記載の可搬型のAACMMであって、前記測定デバイスが、前記アクセサリデバイスであることを特徴とする可搬型のAACMM。
【請求項6】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスが、前記測定デバイスに結合されることを特徴とする可搬型のAACMM。
【請求項7】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスが、前記プローブ端または前記測定デバイスから前記電子回路にボタン選択を送信するようにさらに構成されることを特徴とする可搬型のAACMM。
【請求項8】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスが、前記アクセサリデバイスから前記電子回路にボタン選択データを送信するようにさらに構成されることを特徴とする可搬型のAACMM。
【請求項9】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスが、前記アームセグメントから前記電子回路に温度データを送信するようにさらに構成されることを特徴とする可搬型のAACMM。
【請求項10】
請求項1に記載の可搬型のAACMMであって、前記第1のデバイスデータバスが、前記アクセサリデバイスの特性を特定するためのデータを前記アクセサリデバイスから前記電子回路に送信するようにさらに構成されることを特徴とする可搬型のAACMM。
【請求項11】
請求項1に記載の可搬型のAACMMであって、前記測定デバイスが接触プローブであり、前記アクセサリデバイスがレーザラインプローブ(LLP)であり、前記アクセサリデバイスデータが前記LLPによって生成された複数の2次元データ値を含むことを特徴とする可搬型のAACMM。
【請求項12】
請求項1に記載の可搬型のAACMMであって、前記測定デバイスが接触プローブであり、前記アクセサリデバイスがカメラであり、前記アクセサリデバイスデータがカメラによって生成された画像データを含むことを特徴とする可搬型のAACMM。
【請求項13】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、非同期バスであることを特徴とする可搬型のAACMM。
【請求項14】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、異なる速度で動作することを特徴とする可搬型のAACMM。
【請求項15】
請求項1に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、異なるバス幅を有することを特徴とする可搬型のAACMM。
【請求項16】
請求項1に記載の可搬型のAACMMであって、前記アクセサリデバイスおよび前記電子回路に接続された第2のデバイスデータバスであって、前記エンコーダデータバスとは独立して動作するように構成された、第2のデバイスデータバスをさらに含むことを特徴とする可搬型のAACMM。
【請求項17】
可搬型の関節アーム座標測定機(AACMM)であって、
反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、前記アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、
前記第1の端部に結合された測定デバイスと、
前記少なくとも1つの位置トランスデューサからの前記位置信号を受信し、前記測定デバイスの位置に対応するデータを提供するように構成された電子回路と、
前記測定デバイスと前記第1の端部の間に配置されたプローブ端と、
前記少なくとも1つのトランスデューサおよび前記電子回路に結合されたエンコーダデータバスであって、少なくとも1つの配線を含み、前記電子回路に前記位置信号を送信するように構成された、エンコーダデータバスと、
前記測定デバイスおよび前記電子回路に結合された第1のデバイスデータバスであって、少なくとも1つの配線を含み、前記エンコーダデータバスと同時に、前記エンコーダデータバスとは独立して動作するように構成された、第1のデバイスデータバスとを含むことを特徴とする可搬型の関節アーム座標測定機(AACMM)。
【請求項18】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、非同期バスであることを特徴とする可搬型のAACMM。
【請求項19】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、異なる速度で動作することを特徴とする可搬型のAACMM。
【請求項20】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスおよび前記第1のデバイスデータバスが、異なるバス幅を有することを特徴とする可搬型のAACMM。
【請求項21】
請求項17に記載の可搬型のAACMMであって、前記測定デバイスおよび前記電子回路に接続された第2のデバイスデータバスであって、前記エンコーダデータバスとは独立して動作するように構成された、第2のデバイスデータバスをさらに含むことを特徴とする可搬型のAACMM。
【請求項22】
請求項17に記載の可搬型のAACMMであって、前記位置信号が、カウントを含むことを特徴とする可搬型のAACMM。
【請求項23】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスが、さらに、前記測定デバイスから前記電子回路にボタン選択データを送信するためのものであることを特徴とする可搬型のAACMM。
【請求項24】
請求項17に記載の可搬型のAACMMであって、前記エンコーダデータバスが、さらに、前記アームセグメントから前記電子回路に温度データを送信するためのものであることを特徴とする可搬型のAACMM。
【請求項25】
可搬型の関節アーム座標測定機(AACMM)を動作させる方法であって、
前記可搬型のAACMMの電子回路によってエンコーダデータバスを介して位置信号を受信するステップであって、前記可搬型のAACMMが、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部、前記第1の端部に結合された測定デバイス、前記測定デバイスと前記第1の端部の間に配置されたプローブ端、前記プローブ端に取り外し可能なように結合されたアクセサリデバイス、前記電子回路、少なくとも1つの配線を含み、前記少なくとも1つの位置トランスデューサおよび前記電子回路と通信しているエンコーダデータバス、ならびに少なくとも1つの配線を含み、前記アクセサリデバイスおよび前記電子回路と通信しているデバイスデータバスを含む、ステップと、
前記電子回路で前記デバイスデータバスを介して前記アクセサリデバイスからアクセサリデバイスデータを受信するステップであって、前記デバイスデータバスが、前記エンコーダデータバスと同時に、前記エンコーダデータバスとは独立して動作する、ステップとを含むことを特徴とする方法。
【請求項26】
請求項25に記載の方法であって、前記位置信号および前記アクセサリデバイスデータを外部コンピュータにエクスポートするステップをさらに含むことを特徴とする方法。
【請求項27】
請求項25に記載の方法であって、測定されている物体の図を生成するために前記位置信号および前記アクセサリデバイスデータを組み合わせるステップをさらに含むことを特徴とする方法。
【請求項28】
請求項25に記載の方法であって、測定されている物体を前記可搬型のAACMMに配置されたユーザインターフェースに表示するステップをさらに含むことを特徴とする方法。
【請求項29】
請求項25に記載の方法であって、前記測定デバイスが接触プローブであり、前記アクセサリデバイスがレーザラインプローブであり、前記アクセサリデバイスデータが前記レーザラインプローブによって生成された複数の2次元値であることを特徴とする方法。
【請求項30】
請求項25に記載の方法であって、前記測定デバイスが接触プローブであり、前記アクセサリデバイスがカメラであり、前記アクセサリデバイスデータが画像データであることを特徴とする方法。
【請求項31】
請求項25に記載の方法であって、前記測定デバイスが、前記アクセサリデバイスであることを特徴とする方法。
【図1A】

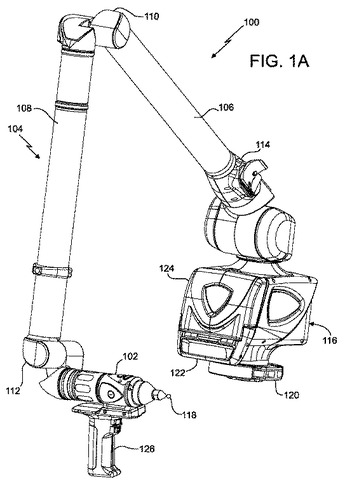
【図1B】
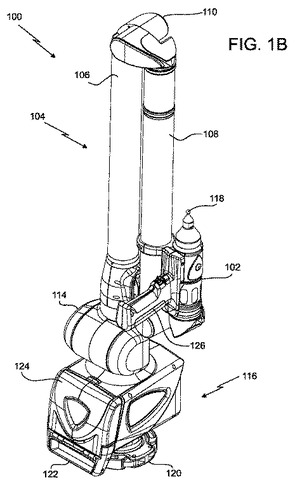
【図2】
【図2A】
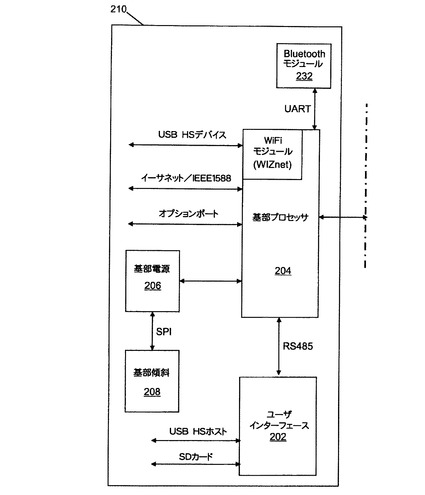
【図2B】
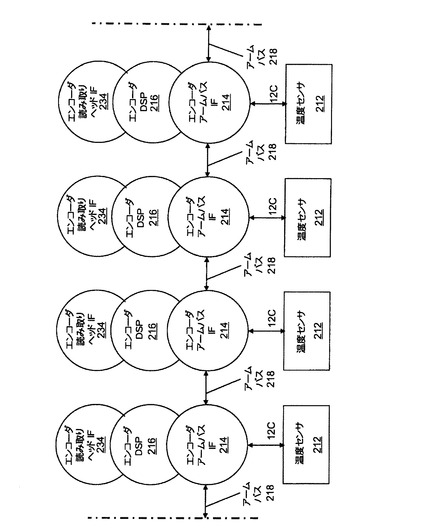
【図2C】
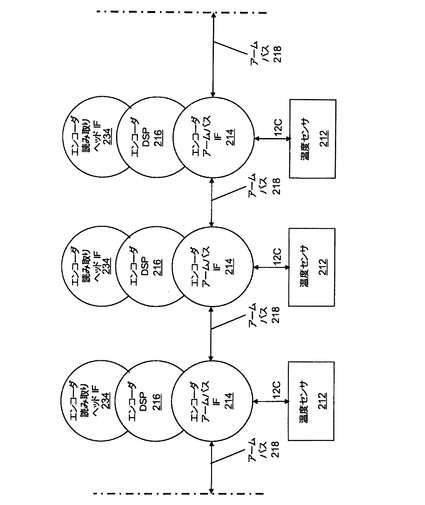
【図2D】
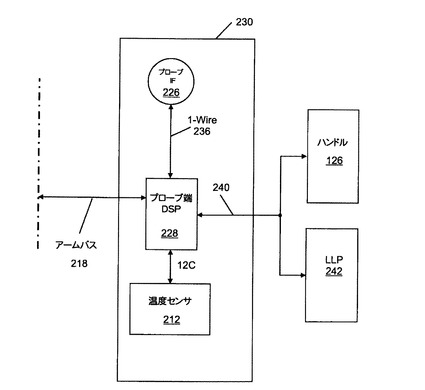
【図3】
【図3A】
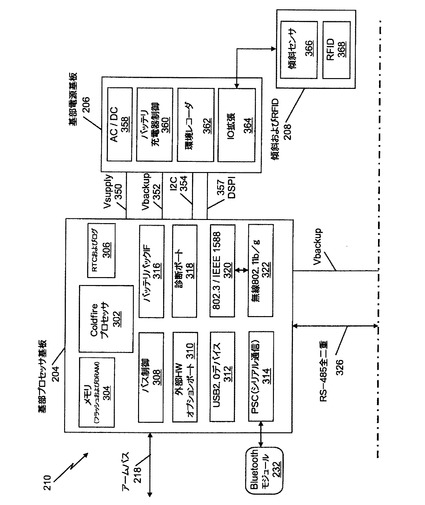
【図3B】
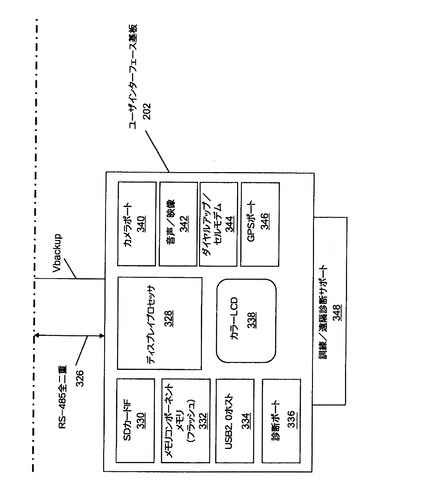
【図4】
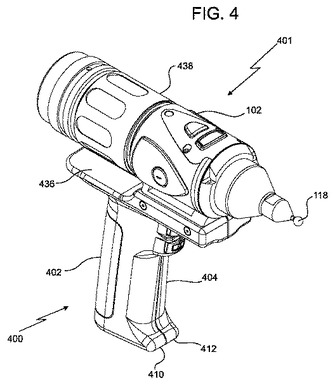
【図5】
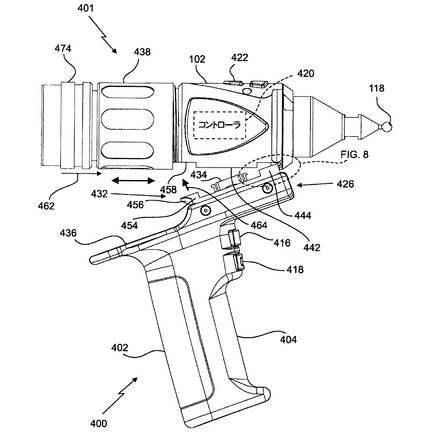
【図6】
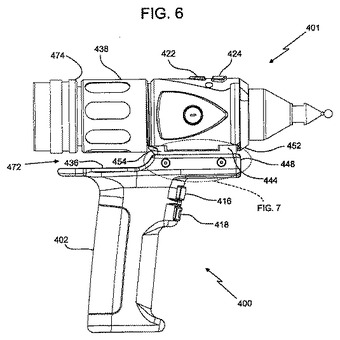
【図7】
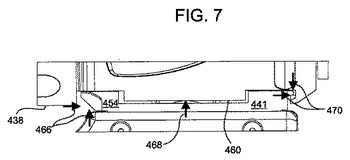
【図8】
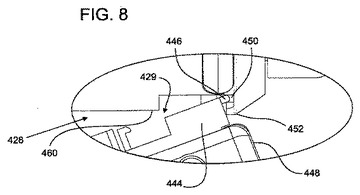
【図9】
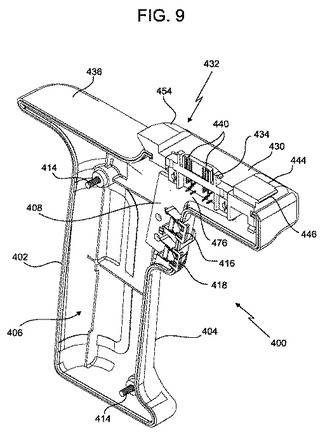
【図10】
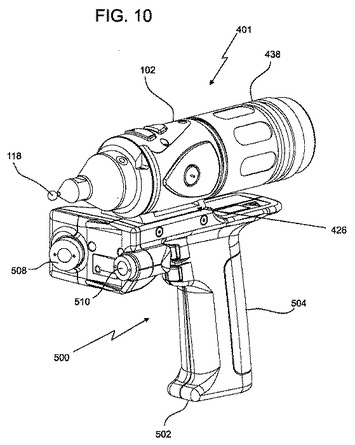
【図11】
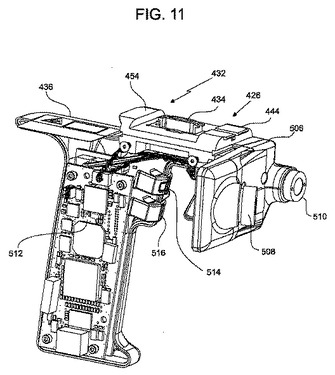
【図12】
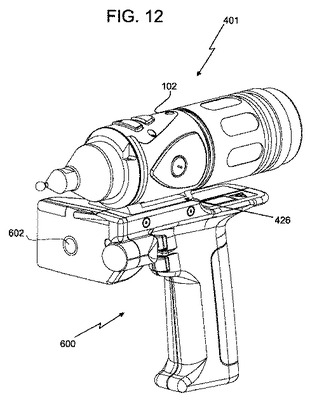
【図13】
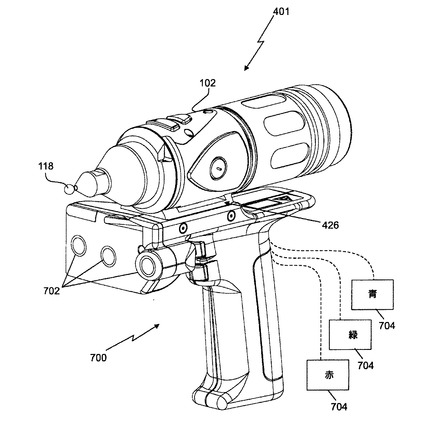
【図14A】
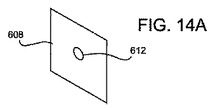
【図14B】
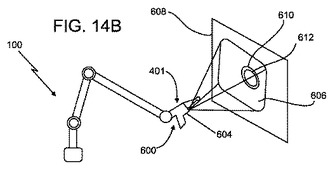
【図14C】
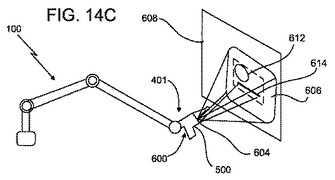
【図15A】
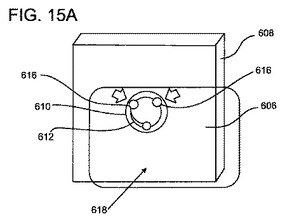
【図15B】
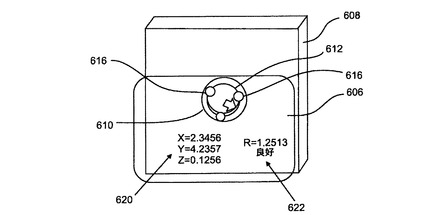
【図16】
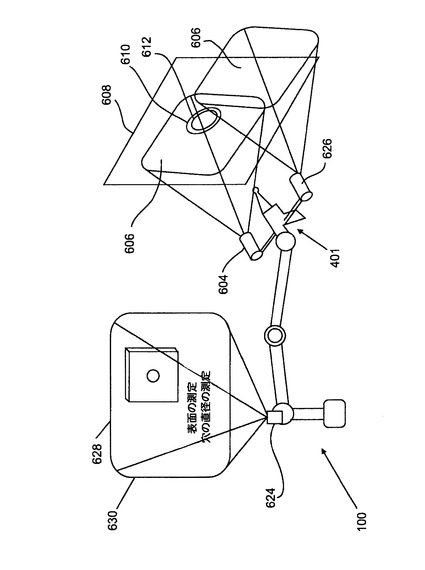
【図17】
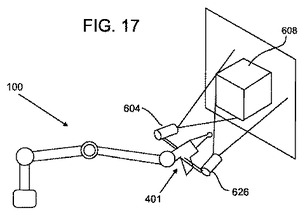
【図18】
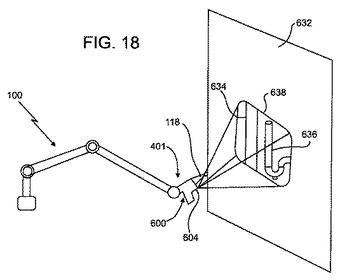
【図19】
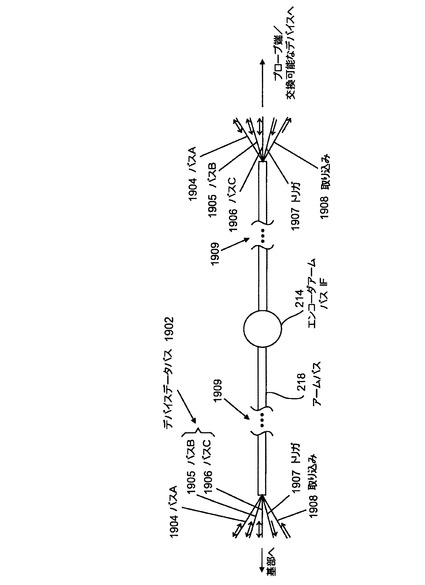
【図20】
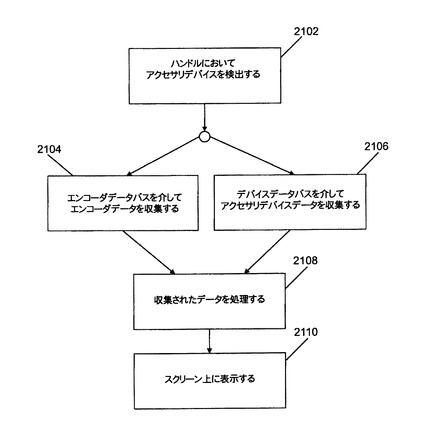
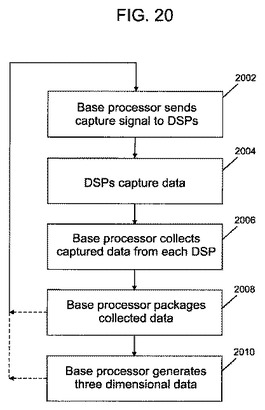
【図21】
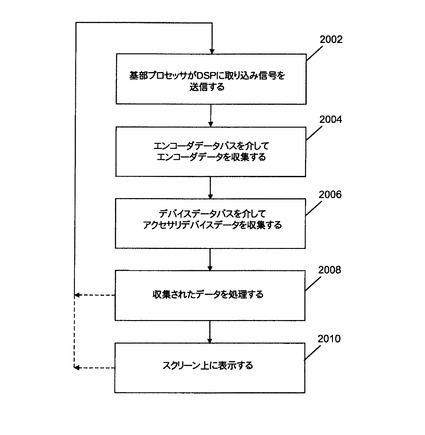
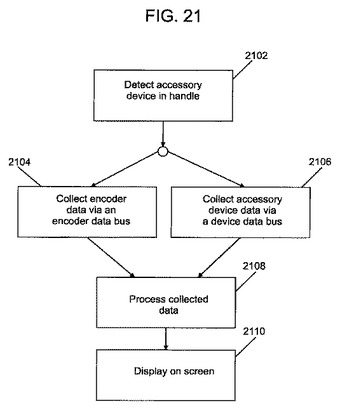
【図1B】
【図2】
【図2A】
【図2B】
【図2C】
【図2D】
【図3】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14A】
【図14B】
【図14C】
【図15A】
【図15B】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公表番号】特表2013−519070(P2013−519070A)
【公表日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2012−550048(P2012−550048)
【出願日】平成23年1月14日(2011.1.14)
【国際出願番号】PCT/US2011/021262
【国際公開番号】WO2011/090895
【国際公開日】平成23年7月28日(2011.7.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.BLUETOOTH
2.イーサネット
3.Coldfire
4.Smalltalk
【出願人】(598064510)ファロ テクノロジーズ インコーポレーテッド (60)
【Fターム(参考)】
【公表日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年1月14日(2011.1.14)
【国際出願番号】PCT/US2011/021262
【国際公開番号】WO2011/090895
【国際公開日】平成23年7月28日(2011.7.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.BLUETOOTH
2.イーサネット
3.Coldfire
4.Smalltalk
【出願人】(598064510)ファロ テクノロジーズ インコーポレーテッド (60)
【Fターム(参考)】
[ Back to top ]